Embed Size (px)
Citation preview

GEOGG121: Methods Introduction to Bayesian analysis
Dr. Mathias (Mat) Disney UCL Geography Office: 113, Pearson Building Tel: 7670 0592 Email: [email protected] www.geog.ucl.ac.uk/~mdisney

• Intro to Bayes’ Theorem
– Science and scientific thinking – Probability & Bayes Theorem – why is it important? – Frequentists v Bayesian – Background, rationale – Methods – Advantages / disadvantages
• Applications: – parameter estimation, uncertainty – Practical – basic Bayesian estimation
Lecture outline

Reading and browsing Bayesian methods, data analysis • Gauch, H., 2002, Scientific Method in Practice, CUP. • Sivia, D. S., with Skilling, J. (2008) Data Analysis, 2nd ed., OUP, Oxford.
• Shih and Kochanski (2006) Bayes Theorem teaching notes: a very nice short intro to Bayes Theorem: http://kochanski.org/gpk/teaching/0401Oxford/Bayes.pdf
Computational • Press et al. (1992) Numerical Methods in C, 2nd ed – see
http://apps.nrbook.com/c/index.html • Flake, W. G. (2000) Computational Beauty of Nature, MIT Press. • Gershenfeld, N. (2002) The Nature of Mathematical Modelling,, CUP. • Wainwright, J. and Mulligan, M. (2004) (eds) Environmental Modelling:
Finding Simplicity in Complexity, John Wiley and Sons.

Reading and browsing Papers, articles, links P-values • Siegfried, T. (2010) “Odds are it’s wrong”, Science News, 107(7),
http://www.sciencenews.org/view/feature/id/57091/title/Odds_Are,_Its_Wrong • Ioannidis, J. P. A. (2005) Why most published research findings are false, PLoS Medicine,
0101-0106. Bayes • Hill, R. (2004) Multiple sudden infant deaths – coincidence or beyond coincidence, Pediatric
and Perinatal Epidemiology, 18, 320-326 (http://www.cse.salford.ac.uk/staff/RHill/ppe_5601.pdf)
• http://betterexplained.com/articles/an-intuitive-and-short-explanation-of-bayes-theorem/ • http://yudkowsky.net/rational/bayes • http://kochanski.org/gpk/teaching/0401Oxford/Bayes.pdf

• Carry out experiments?
• Collect observations? • Test hypotheses (models)? • Generate “understanding”? • Objective knowledge?? • Induction? Deduction?
So how do we do science?

• Deduction – Inference, by reasoning, from general to particular – E.g. Premises: i) every mammal has a heart; ii)
every horse is a mammal. – Conclusion: Every horse has a heart.
– Valid if the truth of premises guarantees truth of conclusions & false otherwise.
– Conclusion is either true or false
Induction and deduction

• Induction – Process of inferring general principles from
observation of particular cases – E.g. Premise: every horse that has ever been
observed has a heart – Conclusion: Every horse has a heart.
– Conclusion goes beyond information present, even implicitly, in premises
– Conclusions have a degree of strength (weak -> near certain).
Induction and deduction

Induction and deduction
• Example from Gauch (2003: 219) which we will return to: – Q1: Given a fair coin (P(H) = 0.5), what is P that 100
tosses will produce 45 heads and 55 tails? – Q2: Given that 100 tosses yield 45 heads and 55 tails,
what is the P that it is a fair coin? • Q1 is deductive: definitive answer – probability
• Q2 is inductive: no definitive answer – statistics – Oh dear: this is what we usually get in science

• Informally, the Bayesian Q is:
– “What is the probability (P) that a hypothesis (H) is true, given the data and any prior knowledge?”
– Weighs different hypotheses (models) in the light of data
• The frequentist Q is: – “How reliable is an inference procedure, by virtue of
not rejecting a true hypothesis or accepting a false hypothesis?”
– Weighs procedures (different sets of data) in the light of hypothesis
Bayes: see Gauch (2003) ch 5

• To Bayes, Laplace, Bernoulli…:
– P represents a ‘degree-of-belief’ or plausibility – i.e. degree of truth, based on evidence at hand
• BUT this appears to be subjective, so P was redefined (Fisher, Neyman, Pearson etc.) : – P is the ‘long-run relative frequency’ with which an event
occurs, given (infinite) repeated expts. – We can measure frequencies, so P now an objective tool for
dealing with random phenomena
• BUT we do NOT have infinite repeated expts…?
Probability? see S&S(1006) p9

• The “chief rule involved in the process of
learning from experience” (Jefferys, 1983) • Formally: • P(H|D) = Posterior i.e. probability of hypothesis
(model) H being true, given data D • P(D|H) = Likelihood i.e probability of data D
being observed if H is true • P(H) = Prior i.e. probability of hypothesis being
true before measurement of D
Bayes’ Theorem
P H |D( )!P D |H( )"P H( )

• Prior?
– What is known beyond the particular experiment at hand, which may be substantial or negligible
• We all have priors: assumptions, experience, other pieces of evidence
• Bayes approach explicitly requires you to assign a probability to your prior (somehow)
• Bayesian view – probability as degree of belief rather than a
frequency of occurrence (in the long run…)
Bayes: see Gauch (2003) ch 5

• Importance? P(H|D) appears on the left of BT
• i.e. BT solves the inverse (inductive) problem – probability of a hypothesis given some data
• This is how we do science in practice • We don’t have access to infinite repetitions of
expts (the ‘long run frequency’ view)
Bayes’ Theorem

• I is background (or conditioning) information as there is ‘no such thing as absolute probability’ (see S & S p 5)
• P(rain today) will depend on clouds this morning, whether we saw forecast etc. etc. – I is usually left out but ….
• Power of Bayes’ Theorem – Relates the quantity of interest i.e. P of H being true given D, to
that which we might estimate in practice i.e. P of observing D, given H is correct
Bayes’ Theorem
P Hypoth. |Data, I( )!P Data |Hypoth., I( )"P Hypoth. | I( )

• To go from to ∝ to = we need to divide by P(D|I)
• Where P(D|I) is known as the ‘Evidence’ • Normalisation constant which can be left out for parameter
estimation as independent of H • But is required in model selection for e.g. where data
amount may be critical
Bayes’ Theorem & marginalisation
P H |D, I( ) =P D |H, I( )!P H, I( )
P(D | I )

• Suppose a drug test is 99% accurate for true positives, and 99% accurate for
true negatives, and that 0.5% of the population use the drug. • What is the probability that someone who tests positive is in fact a user i.e.
what is P(User|+ve)?
• So
• P(D) on bottom , evidence, is the sum of all possible models (2 in this case) in the light of the data we observe
Bayes’ Theorem: example
http://kochanski.org/gpk/teaching/0401Oxford/Bayes.pdf http://en.wikipedia.org/wiki/Bayes'_theorem
P User |+ve( ) =P +ve |User( )!P User( )
P(+ve |User)P(User)+P(+ve | Non"user)P(Non"user)
=0.99!0.005
0.99!0.005+ 0.01!0.995= 0.332
True +ve False +ve

• So, for a +ve test, P(User) is only 33% i.e. there is 67% chance they are NOT
a user • This is NOT an effective test – why not? • Number of non-users v. large compared to users (99.5% to 0.5%) • So false positives (0.01x0.995 = 0.995%) >> true positives (0.99x0.005 =
0.495%) • Twice rate (67% to 33%) • So need to be very careful when considering large numbers / small results • See Sally Clark example at end….
Bayes’ Theorem: example
http://kochanski.org/gpk/teaching/0401Oxford/Bayes.pdf http://en.wikipedia.org/wiki/Bayes'_theorem

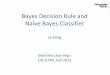
• Laplace (1749-1827) estimated MSaturn from orbital data
• i.e. posterior prob(M|{data},I) where I is background knowledge of orbital mechanics etc.
• Shaded area under posterior pdf shows degree of belief that m1 ≤ MSaturn < m2 (he was right to within < 0.7%)
• How do we interpret this pdf in terms of frequencies? – Some ensemble of universes all constant other than MSaturn? Distribution of
MSaturn in repeated experiments? – But data consist of orbital periods, and these multiple expts. didn’t happen
Eg Laplace and the mass of Saturn
Best estimate of M
Degree of certainty of M
The posterior pdf expresses ALL our best understanding of the problem

• H? HT? HTTTTHTHHTT?? What do we mean fair? • Consider range of contiguous propositions (hypotheses)
about range in which coin bias-weighting, H might lie • If H = 0, double tail; H = 1, double head; H = 0.5 is fair • E.g. 0.0 ≤ H1 < 0.01; 0.01 ≤ H2 < 0.02; 0.02 ≤ H3 < 0.03 etc.
Example: is this a fair coin?
Heads I win, tails you lose?

• If we assign high P to a given H (or range of Hs), relative to
all others, we are confident of estimate of ‘fairness’ • If all H are equally likely, then we are ignorant • This is summarised by conditional (posterior) pdf prob(H|
{data},I) • So, we need prior prob(H,I) – if we know nothing let’s use
flat (uniform) prior i.e.
Example: is this a fair coin?
prob H | I( ) = 1 0 ! H !10 otherwise
"#$
P Hypoth. |Data, I( )!P Data |Hypoth., I( )"P Hypoth. | I( )

• Now need likelihood i.e. prob({data}|H,I) • Measure of chance of obtaining {data} we have actually
observed if bias-weighting H was known • Assume that each toss is independent event (part of I) • Then prob(R heads in N tosses) is given by binomial
theorem i.e.
– H is chance of head and there are R of them, then there must be N-R tails (chance 1-H).
Example: is this a fair coin?
prob data{ } |H, I( )!HR 1"H( )N"R
P Hypoth. |Data, I( )!P Data |Hypoth., I( )"P Hypoth. | I( )

• How does prob(H|{data},I) evolve?
Example: is this a fair coin?
prob data{ } |H, I( )!HR 1"H( )N"R prob H | I( ) = 1 0 ! H !10 otherwise
"#$
H HT TTT TTTH

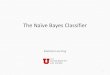
• How does prob(H|{data},I) evolve?
Gaussian prior µ = 0.5, σ = 0.05
prob data{ } |H, I( )!HR 1"H( )N"R prob H | I( ) = 1 0 ! H !10 otherwise
"#$
H0 (mean) not always at peak Particularly when N small
T

• The posterior pdf summarises our knowledge, based on
{data} and prior – Note{data} in this case actually np.random.binomial(N, p)
• Weak prior shifted easily
• Stronger Gaussian prior (rightly) requires a lot more data to be convinced
• See S & S for other priors…. • Bayes’ Theorem encapsulates the learning process
Summary
prob H | I( ) = 1 0 ! H !10 otherwise
"#$
P Hypoth. |Data, I( )!P Data |Hypoth., I( )"P Hypoth. | I( )
prob H | I( ) = e!H!µ( )2! 2
2

• Takes a lot of coin tosses to estimate H to within 0.2-0.3 • If we toss 10 times and get 10 T, this might be strong
evidence for bias • But if we toss 100 times and get 45H 55T, difference still
10 BUT much more uncertain • Gaussian: Although H(0.5) ~ 250000 H(0.25), 1000 tosses
gets posterior to within 0.02
Summary
P Hypoth. |Data, I( )!P Data |Hypoth., I( )"P Hypoth. | I( )

• Can we summarise PDF prob(H|{data},I) concisely (mean, error)? • Best estimate Xo of parameter X is given by condition
• Also want measure of reliability (spread of pdf around Xo) • Use Taylor series expansion • Use L = loge[prob(H|{data},I)] - varies much more slowly with X • Expand about X-Xo = 0 so
• First term is constant, second term linear (X-Xo) not important as we are expanding about maximum. So, ignoring higher order terms….
Reliability and uncertainty
dP
dXXo
= 0d2P
dX2
Xo
< 0
f x( ) = f a( )+!f a( )1!
x " a( )+!!f a( )2!
x " a( )2
+...
L = L X0( )+
1
2
d2L
dX2
X0
X ! X0( )2
+...

• We find
• Where A is a normalisation constant. So what is this function?? • It is pdf of Gaussian (normal) distribution i.e.
• Where µ, σ are maximum and width (sd) • Comparing, we see µ at Xo and
• So X = Xo ±σ
Reliability and uncertainty
prob X | data{ }, I( ) ! Aexp1
2
d2L
dX2
X0
X " X0( )2
#
$%%
&
'((
prob x |µ,!( ) =1
! 2"exp !
x !µ( )2
2! 2
"
#$$
%
&''
http://en.wikipedia.org/wiki/File:Normal_Distribution_PDF.svg
! = !d2L
dX2
X0
"
#
$$
%
&
''
!1 2

• From the coin example • So • Therefore
• So Ho = R/N, and then
• Ho tends to a constant, therefore so does Ho(1-Ho), so σ ∝ 1/√ N • So can express key properties of pdf using Ho and σ • NB largest uncertainty (σmax ) when Ho = 0.5 i.e. easier to identify
highly-biased coin than to be confident it is fair
Reliability and uncertainty prob H | data{ }, I( )!HR
1"H( )N"R
L = loge prob H | data{ }, I( )!"
#$= const + R loge H( )+ N % R( ) loge 1%H( )
dL
dHH0
=R
H0
!N ! R( )1!H
0( )= 0
d2L
dH2
H0
= !R
H2!
N ! R( )1!H( )
2= !
N
H01!H
0( )! =
H01!H
0( )N
EXERCISE: verify these expressions yourself

• Asymmetric pdf? Ho still best estimate • But preal more likely one side of Ho than another • So what does ‘error bar’ mean then? • Confidence intervals (CI)
– shortest interval enclosing X% of area under pdf, say 95%
• Assuming posterior pdf normalised (total area = 1) then need X1, X2 such that
• The region X1 ≤ X < X2 is the shortest 95% CI • For normalised pdf, weighted average given by • Multimodal pdf?
– As pdf gets more complex, single estimates of mean not relevant
– Just show posterior pdf, then you can decide…..
Reliability and uncertainty
prob X1 ! X < X2 | {data}, I( ) = prob X | {data}, I( )dX " 0.95X1
X2
#
95%CI
X = Xprob X | data{ }, I( )dX!
X

• Example: signal in the presence of background noise • Very common problem: e.g. peak of lidar return from forest canopy?
Presence of a star against a background? Transitioning planet?
Parameter estimation: 2 params
! =H01!H
0( )NA
B
x 0
See p 35-60 in Sivia & Skilling

• Data are e.g. photon counts in a particular channel, so expect count in
kth channel Nk to be where A, B are signal and background
• Assume peak is Gaussian (for now), width w, centered on xo so ideal datum Dk then given by
• Where n0 is constant (∝integration time). Unlike Nk, Dk not a whole no., so actual datum some integer close to Dk
• Poisson distribution is pdf which represents this property i.e.
Gaussian peak + background
Dk = n0 Ae! xk!x0( )2 2w2 +B"
#$%&'
! A xk( )+B x
k( )( )k=1
N
"
prob N |D( ) = DNe!D
N!

• Poisson: prob. of N events occurring over some fixed time interval if
events occur at a known rate independently of time of previous event • If expected number over a given interval is D, prob. of exactly N events
Aside: Poisson distribution
prob N |D( ) = DNe!D
N!
Used in discrete counting experiments, particularly cases where large number of outcomes, each of which is rare (law of rare events) e.g. • Nuclear decay • No. of calls arriving at a call centre per
minute – large number arriving BUT rare from POV of general population….
See practical page for poisson_plot.py

• So likelihood for datum Nk is
• Where I includes reln. between expected counts Dk and A, B i.e. for our Gaussian model, xo, w, no are given (as is xk).
• IF data are independent, then likelihood over all M data is just product of probs of individual measurements i.e.
• As usual, we want posterior pdf of A, B given {Nk}, I
Gaussian peak + background prob Nk | A,B, I( ) =
Dk
Nke!Dk
Nk !
Dk = n0 Ae! xk!x0( )2 2w2 +B"
#$%&'
prob Nk{ } | A,B, I( ) = prob Nk | A,B, I( )k=1
M
!
prob A,B | Nk{ }, I( )! prob Nk{ } | A,B, I( )" prob A,B | I( )

• Prior? Neither A, nor B can be –ve so most naïve prior pdf is
• To calc constant we need Amax, Bmax but we may assume they are large enough not to cut off posterior pdf i.e. Is effectively 0 by then
• So, log of posterior • And, as before, we want A, B to maximise L • Reliability is width of posterior about that point
Gaussian peak + background
prob A,B | I( ) =const A ! 0& B ! 0,
0 otherwise.
"#$
%$
prob Nk{ } | A,B, I( )
L = loge prob A,B | Nk{ }, I( )!"
#$= const + Nk loge Dk( )%Dk
!" #$k=1
M
&

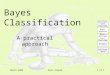
• ‘Generate’ experimental data (see practical)
• n0 chosen to give max expectation Dk = 100. Why do Nk > 100?
Gaussian peak + background

Gaussian peak + background • Posterior PDF is now 2D • Max L A=1.11, B=1.89 (actual 1.09, 1.93)

• Changing the experimental setup?
– E.g. reducing counts per bin (SNR) e.g. because of shorter integration time, lower signal threshold etc.
Gaussian peak + background
Same signal, but data look much noisier – broader PDF Truncated at 0 – prior important

• Changing the experimental setup?
– Increasing number of bins (same count rate, but spread out over twice measurement range)
Gaussian peak + background
Much narrower posterior PDF BUT reduction mostly in B

• More data, so why uncertainty in A, B not reduced
equally? – Data far from origin only tell you about background – Conversely – restrict range of x over which data are collected
(fewer bins) it is hard to distinguish A from B (signal from noise) – Skewed & high correlation between A, B
Gaussian peak + background

• If only interested in A then according to marginalisation
rule integrate joint posterior PDF wrt B i.e.
• So • See previous experimental cases…..
Marginal distribution
prob X | I( ) = prob X,Y I( )dY!"
"
#prob A | Nk{ }, I( ) = prob A,B Nk{ }, I( )dB
0
!
"
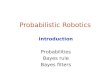
15 bins, ~100 counts maximum 15 bins, ~10 counts maximum
1 2

• Marginal conditional • Marginal pdf: takes into account prior ignorance of B • Conditional pdf: assumes we know B e.g. via calibration • Least difference when measurements made far from A (3) • Most when data close to A (4)
Marginal distribution
31 bins, ~100 counts maximum 7 bins, ~100 counts maximum
prob A | Nk{ }, I( ) ! prob A | Nk{ },B, I( )
4 3

Note: DO NOT PANIC
• Slides from here are for completeness • I will NOT ask you about uncertainty in the 2
param or general cases from here on

• Posterior L shows reliability of parameters & we want optimal
• For parameters {Xj}, with post. • Optimal {Xoj} is set of simultaneous eqns • For i = 1, 2, …. Nparams
• So for log of P i.e. and for 2 parameters we want
• where
Uncertainty
!P!Xi Xoj{ }
= 0
L = loge prob X j{ } data{ }, I( )!"
#$
!L!X Xo ,Yo
=!L!Y Xo ,Yo
= 0
P = prob X j{ } data{ }, I( )Max??
L = loge prob X,Y data{ }, I( )!" #$
Sivia & Skilling (2006) Chapter 3, p 35-51

• To estimate reliability of best estimate we want spread of P about
(Xo, Yo) • Do this using Taylor expansion i.e.
• Or
• So for the first three terms (to quadratic) we have
• Ignore (X-Xo) and (Y-Yo) terms as expansion is about maximum
Uncertainty
L = L Xo,Yo( )+ 12!2L!X 2
Xo ,Yo
X " Xo( )2 + !2L!Y 2
Xo ,Yo
Y "Yo( )2#
$%%
+ 2 !2L!X!Y Xo ,Yo
X " Xo( ) Y "Yo( )&
'((+...
http://en.wikipedia.org/wiki/Taylor_series
f x( ) = f a( )+!f a( )1!
+!!f a( )2!
x " a( )2 +!!!f a( )3!
x " a( )3 +....
f x( ) =f n( ) a( )n!n=0
!
" x # a( )n
Sivia & Skilling (2008) Chapter 3, p 35-51

• So mainly concerned with quadratic terms. Rephrase via matrices
• For quadratic term, Q
• Where
Uncertainty
A = !2L!X 2
Xo ,Yo
,B = !2L!Y 2
Xo ,Yo
,C = !2L!X!Y Xo ,Yo
Q = X ! Xo Y !Yo( ) A CC B
"
#$
%
&'
X ! Xo
Y !Yo
"
#
$$
%
&
''
k!1
k!2
e2
e1
X
Y
Q=k
Xo
Yo
• Contour of Q in X-Y plane i.e. line of constant L
• Orientation and eccentricity determined by A, B, C
• Directions e1 and e2 are the eigenvectors of 2nd derivative matrices A, B, C
Sivia & Skilling (2008) Chapter 3, p 35-51

• So (x,y) component of e1 and e2 given by solutions of
• Where eigenvalues λ1 and λ2 are ∝1/k2 (& k1,2 are widths of ellipse along principal directions)
• If (Xo, Yo) is maximum then λ1 and λ2 < 0 • So A < 0, B < 0 and AB > C2 • So if C ≠ 0 then ellipse not aligned to axes, and how do we
estimate error bars on Xo, Yo? • We can get rid of parameters we don’t want (Y for e.g.) by
integrating i.e.
Uncertainty
A CC B
!
"#
$
%&
xy
!
"##
$
%&&= !
xy
!
"##
$
%&&
prob X data{ }, I( ) = prob X,Y data{ }, I( )!"
+"
#
Sivia & Skilling (2008) Chapter 3, p 35-51

• And then use Taylor again &
• So (see S&S p 46 & Appendix)
• And so marginal distn. for X is just Gaussian with best estimate (mean) Xo and uncertainty (SD)
• So all fine and we can calculate uncertainty……right?
Uncertainty
Sivia & Skilling (2008) Chapter 3, p 35-51
prob X,Y data{ }, I( ) = exp L( )! expQ
2
"
#$
%
&'
prob X data{ }, I( )! exp1
2
AB"C2
B
#
$%
&
'( X " Xo( )
2)
*+
,
-.
!X=
!B
AB!C2
!Y=
!A
AB!C2

• Note AB-C2 is determinant of and is λ1 x λ2
• So if λ1 or λ2 0 then AB-C2 0 and σX and σY ∞ • Oh dear…… • So consider variance of posterior
• Where µ is mean • For a 1D normal distribution this gives • For 2D case (X,Y) here
• Which we have from before. Same for Y so…..
Uncertainty
Sivia & Skilling (2008) Chapter 3, p 35-51
A C
C B
!
"#
$
%&
e2
e1 Var X( ) = X !µ( )
2
= X !µ( )2
prob X data{ }, I( )" dX
X
X !µ( )2
=! 2
! 2
X = X ! Xo( )2
= X ! Xo( )2
"" prob X,Y data{ }, I( )dXdY

• Consider covariance σ2
XY
• Which describes correlation between X and Y and if estimate of X has little/no effect on estimate of Y then
• And, using Taylor as before
• • So in matrix notation • Where we remember that
Uncertainty
Sivia & Skilling (2008) Chapter 3, p 35-51
! 2
XY = X ! Xo( ) Y !Yo( ) = X ! Xo( ) Y !Yo( )"" prob X,Y data{ }, I( )dXdY
! 2
XY<< ! 2
X! 2
Y
! 2
XY=
C
AB!C2
!X
2 !XY
2
!XY
2 !Y
2
!
"
##
$
%
&&=
1
AB'C2
'B C
C 'A
!
"#
$
%&= '
A C
C B
!
"#
$
%&
'1
A = !2L!X 2
Xo ,Yo
,B = !2L!Y 2
Xo ,Yo
,C = !2L!X!Y Xo ,Yo

• Covariance (or variance-covariance) matrix describes covariance
of error terms • When C = 0, σ2
XY = 0 and no correlation, and e1 and e2 aligned with axes
• If C increases (relative to A, B), posterior pdf becomes more skewed and elliptical - rotated at angle ± tan-1(√A/B)
Uncertainty
After Sivia & Skilling (2008) fig 3.7 p. 48
C=0, X, Y uncorrelated Large, -ve correlation Large, +ve correlation

• As correlation grows, if C =(AB)1/2 then contours infinitely wide in
one direction (except for prior bounds) • In this case σX and σY v. large (i.e. very unreliable parameter
estimates) • BUT large off-diagonals in covariance matrix mean we can
estimate linear combinations of parameters • For –ve covariance, posterior wide in direction Y=-mX, where
m=(A/B)1/2 but narrow perpendicular to axis along Y+mX = c • i.e. lot of information about Y+mX but little about Y – X/m
• For +ve correlation most info. on Y-mX but not Y + X/m
Uncertainty
After Sivia & Skilling (2008) fig 3.7 p. 48

• Seen the 2 param case, so what about generalisation of Taylor
quadratic approximation to M params? • Remember, we want {Xoj} to maximise L, (log) posterior pdf • Rephrase in matrix form Xo i.e. for i = 1, 2, …. M we want
• Extension of Taylor expansion to M variables is
• So if X is an M x 1 column vector and ignoring higher terms, exponential of posterior pdf is
Uncertainty
Sivia & Skilling (2008) Chapter 3, p 35-51
!2L!Xi
2"o
= 0
L = L Xo( )+ 12
!2L!Xi!Xj Xoj=1
M
"i=1
M
" Xi # Xoi( ) Yj #Yoj( )+…X1X2!XM
!
"
#####
$
%
&&&&&
prob X data{ }, I( )! exp 12 X " Xo( )T ##L Xo( ) X " Xo( )$
%&'
()

• Where is a symmetric M x M matrix of 2nd derivatives
• And (X-Xo)T is the transpose of (X-Xo) (a row vector) • So this is generalisation of Q from 2D case
• And contour map from before is just a 2D slice through our now M dimensional parameter space
• Constant of proportionality is
Uncertainty
Sivia & Skilling (2008) Chapter 3, p 35-51
prob X data{ }, I( )! exp 12 X " Xo( )T ##L Xo( ) X " Xo( )$
%&'
()
!!L
!!L =
"2L"X1"X1
! "2L"XM"X1
" # ""2L
"X1"XM
! "2L"XM"XM
#
$
%%%%%%%
&
'
(((((((
prob X data{ }, I( )! exp1
2
AB"C2
B
#
$%
&
'( X " Xo( )
2)
*+
,
-.
2!( )!M2 det ""L( )

• So what are the implications of all of this?? • Maximum of M parameter posterior PDF is Xo & we know • Compare to 2D case & see is analogous to -1/σ2 • Can show that generalised case for covariance matrix σ2 is
• Square root of diagonals (i=j) give marginal error bars and off-diagonals (i≠j) decribe correlations between parameters
• So covariance matrix contains most information describing model fit AND faith we have in parameter estimates
Uncertainty
Sivia & Skilling (2008) Chapter 3, p 35-51
!L Xo( ) = 0!!L
! 2!" #$ij = Xi % Xoi( ) Xi % Xoj( ) = % &&L( )%1!"
#$ij

• Sivia & Skilling make the important point (p50) that inverse of
diagonal elements of matrix ≠ diagonal of inverse of matrix • i.e. do NOT try and estimate value / spread of one parameter in M
dim case by holding all others fixed at optimal values
Uncertainty
After Sivia & Skilling (2008) p50.
Xj
Xi
Xoj
σii
Incorrect ‘best fit’ σii
• Need to include marginalisation to get correct magnitude for uncertainty
• Discussion of multimodal and asymmetric posterior PDF for which Gaussian is not good approx
• S&S p51….

• We have seen that we can express condition for best estimate of set
of M parameters {Xj} very compactly as • Where jth element of is (log posterior pdf) evaluated at
(X=Xo) • So this is set of simultaneous equations, which, IF they are linear i.e.
• Then can use linear algebra methods to solve i.e. • This is the power (joy?) of linearity! Will see more on this later • Even if system not linear, we can often approximate as linear over
some limited domain to allow linear methods to be used • If not, then we have to use other (non-linear) methods…..
Summary
!L Xo( ) = 0!L !L !Xj
!L = HX +CXo = !H
!1C

• Two parameter eg: Gaussian peak + background • Solve via Bayes’ T using Taylor expansion (to quadratic) • Issues over experimental setup
– Integration time, number of bins, size etc. – Impact on posterior PDF
• Can use linear methods to derive uncertainty estimates and explore correlation between parameters
• Extend to multi-dimensional case using same method • Be careful when dealing with uncertainty • KEY: not always useful to look for summary statistics – if
in doubt look at the posterior PDF – this gives full description
Summary

END

59
Sally Clark case: Bayesian odds ratios • Two cot-deaths (SIDS), 1 year apart, aged 11 weeks and
8 weeks. Mother Sally Clark charged with double murder, tried and convicted in 1999 – Statistical evidence was misunderstood, “expert” testimony was
wrong, and a fundamental logical fallacy was introduced
• What happened? • We can use Bayes’ Theorem to decide between 2
hypotheses – H1 = Sally Clark committed double murder – H2 = Two children DID die of SIDS
• http://betterexplained.com/articles/an-intuitive-and-short-explanation-of-bayes-theorem/
• http://yudkowsky.net/rational/bayes

60
The tragic case of Sally Clark
• Data? We observe there are 2 dead children • We need to decide which of H1 or H2 are more
plausible, given D (and prior expectations) • i.e. want ratio P(H1|D) / P(H2|D) i.e. odds of H1 being
true compared to H2, GIVEN data and prior
P H1|D( )P H2 |D( )
=P D |H1( )P D |H2( )
!P H1( )P H2( )
prob. of H1 or H2 given data D
Likelihoods i.e. prob. of getting data D IF H1 is true, or if H2 is true
Very important - PRIOR probability i.e. previous best guess

61
The tragic case of Sally Clark • ERROR 1: events NOT independent • P(1 child dying of SIDS)? ~ 1:1300, but for affluent non-
smoking, mother > 26yrs ~ 1:8500. • Prof. Sir Roy Meadows (expert witness)
– P(2 deaths)? 1:8500*8500 ~ 1:73 million. – This was KEY to her conviction & is demonstrably wrong – ~650000 births a year in UK, so at 1:73M a double cot death is a 1
in 100 year event. BUT 1 or 2 occur every year – how come?? No one checked …
– NOT independent P(2nd death | 1st death) 5-10 higher i.e. 1:100 to 200, so P(H2) actually 1:1300*5/1300 ~ 1:300000

62
The tragic case of Sally Clark
• ERROR 2: “Prosecutor’s Fallacy” – 1:300000 still VERY rare, so she’s unlikely to be innocent, right??
• Meadows “Law”: ‘one cot death is a tragedy, two cot deaths is suspicious and, until the contrary is proved, three cot deaths is murder’
– WRONG: Fallacy to mistake chance of a rare event as chance that defendant is innocent
• In large samples, even rare events occur quite frequently - someone wins the lottery (1:14M) nearly every week
• 650000 births a year, expect 2-3 double cot deaths….. • AND we are ignoring rarity of double murder (H1)

63
The tragic case of Sally Clark • ERROR 3: ignoring odds of alternative (also very rare)
– Single child murder v. rare (~30 cases a year) BUT generally significant family/social problems i.e. NOT like the Clarks.
– P(1 murder) ~ 30:650000 i.e. 1:21700 – Double MUCH rarer, BUT P(2nd|1st murder) ~ 200 x more likely given first,
so P(H1|D) ~ (1/21700* 200/21700) ~ 1:2.4M
• So, two very rare events, but double murder ~ 10 x rarer than double SIDS
• So P(H1|D) / P(H2|D)? – P (murder) : P (cot death) ~ 1:10 i.e. 10 x more likely to be double SIDS – Says nothing about guilt & innocence, just relative probability

64
The tragic case of Sally Clark • Sally Clark acquitted in 2003 after 2nd appeal (but not on
statistical fallacies) after 3 yrs in prison, died of alcohol poisoning in 2007 – Meadows “Law” redux: triple murder v triple SIDS?
• In fact, P(triple murder | 2 previous) : P(triple SIDS| 2 previous) ~ ((21700 x 123) x 10) / ((1300 x 228) x 50) = 1.8:1
• So P(triple murder) > P(SIDS) but not by much
• Meadows’ ‘Law’ should be: – ‘when three sudden deaths have occurred in the same family, statistics give no
strong indication one way or the other as to whether the deaths are more or less likely to be SIDS than homicides’
From: Hill, R. (2004) Multiple sudden infant deaths – coincidence or beyond coincidence, Pediatric and Perinatal Epidemiology, 18, 320-326 (http://www.cse.salford.ac.uk/staff/RHill/ppe_5601.pdf)

• Where prob(X|I) is the marginalisation equation • But if Y is a proposition, how can we integrate over it?
Bayes’ Theorem & marginalisation
prob X |Y, I( ) =prob Y | X, I( )! prob X, I( )
prob(Y | I )
prob X | I( ) = prob X,Y | I( )dY"#
+#
$
• Generally, using X for Hypothesis, and Y for Data

• Suppose instead of Y and (not Y) we have a set of alternative possibilities: Y1, Y2, …. YM = {Yk}
• Eg M candidates for an election, Y1 = prob. candidate 1 will win, Y2 cand. 2 will win etc.
• Prob that X is true e.g. that unemployment will fall in 1 year, irrespective of who wins (Y) is
• As long as
• i.e. the various probabilities {Yk} are exhaustive and mutually exclusive, so that if one Yk is true, all others are false but one must be true
Bayes’ Theorem & marginalisation
prob X | I( ) = prob X,Yk | I( )k=1
M
!
Y
prob X,Yk | I( )k=1
M
! =1

• As M gets larger, we approach
• Eg we could consider an arbitrarily large number of propositions about the range in which my weight WMD could lie
• Choose contiguous intervals and large enough range (M ∞), we will have a mutually exclusive, exhaustive set of possibilities
• So Y represents parameter of interest (WMD in this case) and integrand prob(X,Y|I) is now a distribution – probability density function (pdf)
• And prob. that Y lies in finite range between y1 and y2 (and X is also true) is
Bayes’ Theorem & marginalisation prob X | I( ) = prob X,Y | I( )dY
!"
+"
#
pdf X,Y = y | I( ) = lim!y!0
prob X, y "Y < y+!y | I( )!y
prob X, y1!Y < y
2| I( ) = pdf X,Y | I( )dY
y1
y2
"