-
8/7/2019 Frosts original paper ieee 1972
1/10
926 PROCEEDINGS OF THE IEEE, VOL. 60, NO . 8, UGUST 1972
A n Algorithm For Linearly ConstrainedAdaptive Array
ProcessingOTIS LAMONT FROST, 111, MEMBER, IEEE
Abstract-A constrained least mean -squares algorithmhas
beenderived whichis capab le of a djusting an array of se nsor s in
real timeto respond to a signal coming from a desired direction
while dis-criminating against noises
comingfromotherdirections.Analysisand omputer simulations confirm
hat the algorithm is able toiteratively adapt variable weights on
the taps of the senso r array tominimize noise power in the array
output. A se t of linear equalityconstraints on the weights
maintains a chosen frequency characteris-tic for the array in the
direction of interest.The array problem would be a classical
constrained least-mean-squares problem except that the signal and
noise statistics are as-sumed unknown a priori.A geometrical
presentation shows that the algorithm is able tomaintain the
constraints and prevent the accum ulation of quantiza-tion errors
in a digital mplementation.
T I. NTRODUCTIONHIS PAPERdescribes a simple algorithm for
adjustingan array of sensors in real time to respond toa
desiredsignal while discriminating against noises. A signalishere
defined as a waveform of int eres t which arrives nplane waves from
a chosen direction (called the look direc-tion).Thealgorithm
terativelyadapts heweights of abroad-band sensor array (Fig. 1) to
minimize noise power a ta t the array output while maintaining a
chosen frequencyresponse in the look direction.
The lgorithm, called theConstrainedLeastMean-Squares or
ConstrainedLMS lgorithm,s a
simplestochasticgradient-descentalgorithm which requiresonlyth at
th e direction of arrival and a frequency bandof interestbe
specified a priori. In the adapti ve process, the
algorithmprogressively learns statisticsof noise arriving from
directionsother than the look direction. Noise arriving from he
lookdirection may be filtered out by a suitable choice of the
fre-quency response characteristic in th at direction, or by
exter-nalmeans. Subsequent processing of the arr ay output maybe
done for detection or classification.A major advantage of the
constrained LMS algorithm isthat it has a self-correcting feature
permitting it to operatefor arbit rari ly long periods of time in a
digital computer im-plementation without deviating from its
constraints becauseof cumulative roundoff or truncation errors.
The algorithm is applicable to array processing problemsin
geoscience, sonar, and electromagnet ic antenna arrays inwhich a
simple method is required for adjust ing an array inreal time
odiscriminateagainst noises impinging o n thear ray sidelobes.
ManuscriptreceivedDecember23,1971:revised May 4, 1972.
Thisresearch is based on a Ph.D. dissertation in the Department of
ElectricalEngineering, Stanford University, Stanford, Calif.The
author is with ARGOSystems, Inc., Palo Alto, Calif. 94303.
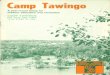
Fig. 1 . Broad-band antenna array and equivalent processor for
signalscoming from the look direction.
Previous WorkPrevious work on itera tive least squares array
processing
was done by Griffiths [ l ] ;his method uses an
unconstrainedminimum-mean-square-errorptimizationriterionwhichrequires
a priori knowledge of second-order signal statistics.Widrow,
Mantey, Griffiths, and Goode [ 2 ] proposed a vari-able-criterion
[3 ] optimizationprocedure nvolving he useof a known training
signal; this was an application and extesion of the original work o
n adaptive filters done by Widrowand Hoff [4] . Griffiths lso
proposed a constrained eastmean-squares processor not requiring a
priori knowledge ofthe signal statistics [SI;a new derivation of th
is processor,given in [ 6 ] , shows that
tmaybeconsideredasputtingsoft constraints on the processor via the
quadratic penalty-function method.
Ha rd (i.e., exactly)-constrained terativeoptimizationwas
studied by Rosen [ 7 ] for the deterministic case. Lacoss[8] ,
Booker et al. [g] , andKobayashi [ l o ] studiedhard-constrained
optimization in the array processing context forfiltering short
lengths of dat a. All four authors used gradient-projection
techniques [ l l ] ;Rosen and Booker correctly indi-cated
hatgradient-projectionmethodsare usceptible ocumulative roundoff
erro rs and are not sui table for long run
swithoutanadditionalerror-correctionprocedure.Thecon-strained L M S
algorithmdeveloped n hepresentwork sdesigned
toavoiderroraccumulation while maintainingahard constraint; as a
result, it is able to provide continuafilter ing for arbitrarily
large numbers of i terations.Basic Principle of the Constraints
Thealgorithm sable omaintaina chosen frequencyresponse in the
look direction while minimizing output noise
Authorized licensed use limited to: RMIT University. Downloaded
on February 13, 2009 at 01:38 from IEEE Xplore. Restrictions
apply.
-
8/7/2019 Frosts original paper ieee 1972
2/10
F R O S T : A L G O R I T H M F O R A D A P T I V E A R R A Y P
R O C E S S I N G
power because of a simple relation between the look
directionfrequencyresponseand heweights n hearray of Fig. 1.Assume
th at he look direction schosenas hedirectionperpendicular o he ine
of sensors. Then dentical ignalcomponents arrivingon a plane
wavefront parallel to the lineof sensors appear at th e first taps
simultaneously and paradein parallel down the tapped delay lines
following each sensor;however, noise waveforms arriving from other
than the lookdirection will not,
ngeneral,produceequalvoltagecom-ponents on an y given vertical
column of taps. The voltages(signalplusnoise) at each
aparemultipliedby he apweights and added to form the arra y output.
Thus as far asthe signal is concerned, the arra y processor is
equivalen t toa single tapped delay ine in which each weight is
equal o th esum of the weights in the corresponding vertical column
ofthe processor, as indic ated in ig. 1.These summation weightsin
the equivalent tapped delay line must be selected so as togive the
desired frequency response characteristic in the lookdirection.
If t he look direction is chosen to be other t h a n tha t
per-pendicular to he line of sensors, hen hearraycanbesteered
either mechanically or electrically by the addition ofsteering
imedelays notshown)placed mmediatelyaftereach sensor.A processor
having K sensors and J taps per sensor hasK J weights and requires
J constraints to determ ine its ook-direction frequency response.
The remaining K J - J degreesof freedom in choosing the weights may
be used to minimizethe total power in the array output. Since the
look-directionfrequency response is ixed by the J constraints,
minimizationof the total outpu t ower is equivalent tominimizing
the n o n -look-direction noise power, so long as the setf signal
voltagesa t the taps is uncorrelat ed with the set of noise
voltages atthese taps. The latter assumption has commonly been
madein previous work on itera tive array processing [l ] , [SI,
[8]-[ l o ] . The effect of signal-correlated noise in the arr ay
maybe to cancel out all or part of th e desired signal componentin
the array output. Sou rcesf signal-correlated noise may bemultiple
ignal-propagationpaths, nd oherent adarorsonar clutter.
I t is permissible, and n fact desirable for proper
noisecancellation that the voltages produced by the noises on th
etaps of the ar ray be correlated among themselves,
althoughuncorrelatedwithhe ignal oltages.Examples of suchnoises
include waveforms from point sources n other hanthe lookdirection
(e.g., lightn ing, jammers , noise fromnearby vehicles}, spatially
ocalized ncoherent clutter, andself-noise from t he stru cture
carrying the ar ray.
Noise voltages which are uncorrelated between taps
(e.g.,amplifier hermal noise) maybepartially ejectedby headap tive
arra y in two ays. As in a conventional nonadaptivearray,such
noises are elim inate d o he exte nt hat signalvoltages o n the
taps are added coherentlyt the array output,while uncorrelated
noise voltagesareadded ncoherently.Second, an adaptive array can
reduce the weighting on an ytap t h a t may have a disportionately
large uncorrelated noisepower.
11. OPTIMUM-C ONSTR AINEDM S WEIGHTVECTORTh e first step n
developing he constrained L M S algo-
rithm is t o find the optimum weight vector.
92 7Notation
Not ati on will be as follows (see Fig. 2):Every A seconds,
where A may be a multiple of the delay
r between taps, the voltages at the array taps are sampled.The
vector of tap voltages at the kth sample is written X(where
X T ( k ) [ ~ 1 ( k A ) , * ( k A ) , * * , X K J ( ~ A ) ] .The
superscript T denotes ranspose. The ap voltages arethe su ms of
voltages due to look-direction waveforms 1 andnon-look-direction
noises n, so tha t
X ( k ) = L ( k ) + X @ ) (1)where theKJ-dimensionalvector of
look-directionwave-forms a t the kth sample is
W )R aps
1 K tapsK taps
and the vec tor of non-look-direction noises isN T ( k )4
[n~(kA) , n(kA) , * . , ~ K J ( W ] .
The vect or of weights a t each ta p is W,whereWTp Wl, w2, . * *
,W K J ] .I t isassumed or hisderivation hat hesignalsand
noises are adequately modeled as zero-mean randomrocesseswith
(unknown) second-order statistics:
E [ X ( k ) X T ( h ) ] R x x ( 2 4E [ N ( k ) ; V T ( k ) ]4 R
N N (2b)E [ L ( k )L T ( k ) 4 R L L . ( 2 4
As previously stated, it is assumed that the vector of
look-direction waveforms is uncorrelated with the vector of
non-look-direction noises, i.e.,
E [ N ( k ) L T ( k ) ]= 0 . (3)I t is assumed tha t the noise
environment s distributed sothat R X Xan d R N Nare positive
definite [12].
The outp ut of the array (signal estimate) at the time ofkth
sample is
y ( k ) = W T X ( k ) = X * ( k ) W . (4)Using (4 ) the exp
ected output power of th e array is
E [ y Z ( k ) ]= E [ W T X ( k ) X T ( k) W ] W T R x x W . (5
)The constraint that the weightsn th e jt h ertical column
of taps sum toa chosen num ber fi (see Fig. 1) is expressed
by
Authorized licensed use limited to: RMIT University. Downloaded
on February 13, 2009 at 01:38 from IEEE Xplore. Restrictions
apply.
-
8/7/2019 Frosts original paper ieee 1972
3/10
928 PROCEEDINGS OF THE IEEE, AUGUST 1972
LOOK DIMCTIONSIGNALS Ax)NOISESP1.1
NOISE ANOISE B
NOW-LOOK DIAECTDNno(Ks - th2ZtxtFig. 2. Signals and noises on
the array. Because the array is steered toward the look direction,
all beam signalcomponents on any given column of filter taps are
identical.
the requirementcjTW = f j , j = 1, 2, - . ,J
where the KJ-dimensional vector c j has the form
cj =
'0 '
0
0
01
10
0
0. o m
j th group of K elements.
Constraining the weight vector to satisfy the J equations of(6)
estricts W to a (KJ-J)-dimensional plane.Define the constraint
matrix C as
-
look-direction-equivalent tapped delay line shown in Fig. 1:
By inspection the constraint vectors c j are linearly
indepen-dent, hence, C has full rank equal to J . The constraints (
6 )are no w written
CTW = 5. (10)Optimum Weight Vector
Since the look-direction-frequency response is ixed by theJ
constraints,minimization of the non-look-directionnoisepower is the
sameas minimization of the total outpu t power.The cost crit erion
used in this paper will be minimization oftotal array output power
WTRxxW. Th e problem of findingthe optimum set of filter weights
Wept is summarized by (5 )and (10) as
minimize W T R x x W Ula)subjecto CTW = 5. (1W
W
This is the constrained M S problem.W,,t is oundby hemethod of
Lagrangemultipliers,which is discussed in [13]. Including a factor
of + to simplifylater arithmetic, he constraint function s adjoined
o hecost unctionby a /-dimensionalvector of undete rminedLagrange
multipliers X:
H ( W ) = + W T R x x W + XT(CTW- 5). (12)Taking the gradient of
(12) with respect to W
V w H ( W )RxxW +a. (13)Th e first term in (13) is a vector
proportional to the gradientof the cost function (lla), and the
second term is a vectornd define 5 as the J-dimensional vector of
weights of th e
Authorized licensed use limited to: RMIT University. Downloaded
on February 13, 2009 at 01:38 from IEEE Xplore. Restrictions
apply.
-
8/7/2019 Frosts original paper ieee 1972
4/10
FROST: ALGORITHM FO R ADAPTIVERRAY PROCESSING 92 9normal to the
(KJ-J)-dimensional constraint plane definedby PW-S=O [14].
Foroptimality hesevectorsmustbeantiparalle l [IS], which is
achieved by se tting the sum f th evectors (13) equal to zero
V w H ( W ) = R x x W + CX = 0.In erms of
theLagrangemultipliers, heoptimalweightvector is then
Wopt = - R x x - 0 (14)where Rxx-l exists because R X X was
assumed positive defi-nite. Since Wept must satisfy the constraint
(llb)
C T W o p t= 5 = - CTRxx-CXand the Lagrange multipliers are
found to be
x = - [ c R~x-C]-5 (15)where the existence of [CTRxx-C]- ollows
from the fact sthat R X X is positive definite and C has full rank
[6]. From(14) and (15) the optimum-constrained LMS weight
vectorsolving (11) is
Wept = R x x - C [ C ~ R X X - * C ] - ~ ~ . (16)Using the set
of weights Wept in the arr ay processor of
Fig. 2 forms the optimum constrained LMS processor, whichis a
filter in space and f requency. Substituti ngept in (4),
theconstrained least squares estimatef the look-direction wave-form
is
yo&) = Wo,tTX(k). (1 )Discussion
Th e constrained LMS filter is sometimes known by othernames. If
the frequency characteristic in the look-direction ischosen to
beall-passand inearphase distortionless), heout put of the
constrained LMS filter is the maximum likeli-hood estimate of a
stat ionary process in Gaussian noise f t heangle of arrival is
known [IS]. Th e distortionless form of theconstrained LMS filter
is called by some authors the
Mini-mumVarianceDistortionlessLookestimator,
MaximumLikelihoodDistortionlessEstimator, nd LeastSquaresUnbiased
Estimator. By suitable choice of 5 a variety ofother optimal
processors can be obtained [16].
111. THEADAPTIVELGORITHMIn hispaper t sassumed hat he
nputcorrelation
matrix R X X s unknown a pr ior i and must be learned by an
implement and, for a given computational cost, is applicableto
arrays in which the number of weights is on the order ofthe square
of the number that could be handled by the itera-tive matrix
inversion method and the cubef the number thatcould be handled by
the direct substitution method.Derivation
For motivation of the algorithm derivation emporarilysuppose hat
he correlation matrix Rxx is known. In con-strained
gradient-descent optimization, the weight vector isinitialized at a
vectorsatisfying heconstraint llb),sayW(0 )=C ( P C ) - V , and at
each iteration the weight vector ismoved in the negative direction
of the constrained gradient(13). The len gth of the step is
proportional to the magnitudeof the constrained gradient and s
scaled by a constant p .After the kth iteration the next weight
vector is
W ( k + 1) = W ( k )- p v w a [ W ( k ) ]= W(k)- [ R x x W ( k
)+ CX(k)] (18)
where the second step is from (13). The Lagrange
multipliersarechosenby equiringW(kS1) osatisfy heconstraint( l lb )
:5 = C T W ( k+ 1) = C T W ( k )- C T R x x W ( k )- CTCX(k)
.Solving for the Lagrange multipliersX(k) and substitutingithe
weight-iteration equation (18) we haveW ( k + 1) = W ( k )- [ l - C
( C T C ) - C T ] R x x W ( k )+ C(CTC)-[5 C T W ( k ) ] . (19)
The determinist ic algorithm (19) is shown i n this form
toemphasize that the last factor5- F W ( k ) s not assumed tobe
zero, as it would be if th e weight vector precisely satisfiedthe
constraint t the kth iteration. t will be shown in SectionVI that
this term permits the algorithm to correct any smalldeviations from
the constraint due to arithmetic inaccurac yand prevents their
eventual accumulat ion and growth.
Defining the KJ-dimensional vectorF 6 C(CTC)-15 (204
and theK J X K J matrixP p - C(CTC)-CT (20b)
the algorithm may be rewritten asW ( k + 1) = P [ W ( k )- R x x
W ( k ) ]+ F . (21)
adaptiveechnique. In stationarynvironmentsuringEquation (21) is
a deterministi c onstrained radientlearning! and i n time-vavingthe
Optimum a n estimate Of descent algorithm requiring knowledge of
the input correla-weights mus t be recomputed periodically.
tionatrix R x x , which, however, inhe array isDirect substitution
of a correlation matrix estimate into the
optimal-weight equation (16) requires a number of
multipli-cations a t each iteration proportional to the cubef the
num-required inversion of the input correlation matrix.
RecentlySaradis et a l . [I71 and Mantey and Griffiths [18 ] have
shownhow to iteratively update matrix inversions, requiring
onlyanumber of multiplications and storage locations proportional
W(0 )= Fto the squareof the number of weights. The
gradient-descentconstrainedLMSalgorithmpresentedhere equiresonly
anumber of multiplicat ions and storage locations directl y
pro-portional to the number of weights. It is therefore simple to
where y ( k ) is the array outputsignal estimate) defined by
(4).
unavailable a priori. An available and simple approximationfor R
X X a t the kth iteration is the outer product of the
tapvoltagevectorwith tself: X ( k ) X T ( k ) .Substi tution of thi
salgorithm
Of weights. The is primarily caused by th e estimatento (21)
gives theonstrainedMS
W ( k + 1) = P [ W ( k )- y ( k ) X ( k ) ]+ F !Authorized
licensed use limited to: RMIT University. Downloaded on February
13, 2009 at 01:38 from IEEE Xplore. Restrictions apply.
-
8/7/2019 Frosts original paper ieee 1972
5/10
930Discussion
Theconstrained L M S algorithm (22) atisfies thecon-straint P W
( k + 1 ) = 5 at each tera tion , as can be verifiedby
premultiplying(22) by P nd using (20). At each iterationthe
algorithm requires only he ap voltages X ( k ) and thearray output
( k ) no a prior i knowledge of the input correla-tionmatrix
sneeded. F is a constant vector hat can beprecomputed. One of the
wo most complex operations re-quired by (22) is the mult iplication
of each of the K J com-ponents of thevector X ( k ) by hescalar p y
( k ) ; the othersignifica I t operationsndicated yhematrix P = I-
( P C ) - l P . Because of the simple form of C [refer to 7 ) ]
,multiplication of a vector by P as indicated in (22) amountsto
little more than a few additions. Expressed in summationnotation
the iterative equations for the weight vector com-ponents are
PROCEEDINGSOF THE IEEE, AUGUST 1972(22), using (4), (2a), and
the independence assumption yieldan iterative equation in the mean
value of the constrainedL M S weight vectorE[W(k+ I ) ] = P { E [ W
( k ) ]- R x x E [ W ( k ) ] ]+ F . ( 2 3 )
Define thevector V ( k f 1 ) to be the difference betweenthe
mean adaptive weight vector at iteration k fl and theoptimal weight
vector (16)
V ( k + 1) p E [ W ( k + l ) ]- w o p t .Using (23)
andheelations F = ( I - P ) Wept an dPRxxWo,t=O, which may be
verified by direct subs titu tionof (16) and (20b), an equation for
th e difference process maybe constructed
V ( k + 1) = PV(R) - P R x x V ( k ) .2 4 )
These equations can readily be implemented on a
digitalcomputer.
IV .PERFORMANCEConvergence to the Optimum
The weight vector W ( k ) obtained by the use of the sto-chastic
algorithm (22) is a random vector. Convergencef themeanweightvector
o heoptimum sdemonstratedbyshowing that th e len gth of the
difference vector between themeanweightvectorand heoptimum (16)
asympto ticallyapproaches zero.
Proof of convergence of themean is greatly simplifiedby he
assumption (used n [2]) hat successive samples ofthe input vector
taken A seconds apart are statistically inde-pendent.This ondition
anusually be approximated npractice by sampling the input vector t
intervals large com-pared o he correlat ion ime of the input
process plus helength of time it takes an input wav eform to pr
opagate downthe a rray. The a ssump tion is ore restrictive than
necessary,since Daniel1 [19 ] has shown that the much weaker
assump-tion of asymptotic ndependence of the nputvectors
ssufficient to demonstrate convergenc e in the related
uncon-strained least squares problem.
Taking the expected value of both sides of the algorithm
The idempotence ofP (i.e., P 2 = P ) , hich can be verifiedby
carrying out the multiplicat ion using (20b) and premulti-plication
of equation (24) by P shows that P V ( k )= V ( k ) forall k, so
(24) can be written
V ( k + 1) = [I- p P R x x P ] V ( k )= [ I - PRxxP]k+1V(O).
The matrix P R x x P determines both .the rate of conver-gence
of themeanweightvector o heoptimumand hesteady-state variance f the
we ight ve ctor ab out th e optimIt i s shown n [6] hat P R x x P
has precisely J zero eigen-values, corresponding t o the column
vectors of the constraintmatrix C; this is a result of the fact
that during adaption nomovement is permitted away from (KJ-
J)-dimensional costr ain t plane. I t is also shown in[6, appendix
C] th atP R x x Phas KJ - J nonzero eigenvaluesui. i = 1, 2, . . 0
, K J - J, withvalues bounded between the smallest and largest
eigenvaluesof RxxAmin 5 ami, 5 (Ti 5 umax 5 X i = 1 , 2 , . . . ,K
J -where Amin an d X are the smallest and largest eigenvaluesof R X
Xan d urnin nd urnaxre the smallest and largest nonzeeigenvalues
ofPRxx P .
Authorized licensed use limited to: RMIT University. Downloaded
on February 13, 2009 at 01:38 from IEEE Xplore. Restrictions
apply.
-
8/7/2019 Frosts original paper ieee 1972
6/10
FROST: ALGORITHM FOR ADAPTIVE ARRAY PROCESSING 93Examination of
V(O)=F - Wept shows that tcan be
expressed as inear ombina tion of the igenvectors ofP R x x P
corresponding to nonzero eigenvalues. f V ( 0 ) s equalto an
eigenvector f P R x x P , sa y ei with eigenvalueui#O then
V ( ~ Z 1) = [ I - P R X X P ] ~ + ~ ~ ~= [I - ui]k+ei.
Th e convergence of the mean weight vector to the opti-mum
weight vector along any eigenvectorf P R x x P is
there-foreeometricwitheometricatio1-pa;). Theim erequired for the
euclidean length of the difference vector todecrease to e-1 of its
initial value (time constant) is
7i = A/ln (1 - pai) EA/pai ( 2 5 )where the approximation is
validor pcaillIIv(k + l>lj
5 (1- Pamin)k+ll/V(o>Ijan d so if the initial difference is
finite the mean weight vectorconverge s to t he opti mum, i.e.,
lim I ~ E [ W ( K ) ] - Wopt l (= 0k+ mwith time constants given
by (25).Steady-State Performance-Stationary Environment
The algorithm is designed to continually adapt for copingwith
nonstationary noise environm ents. In stationar y environ-ments
this adaptation causes the weight vector to havevari-ance about he
optimum and produces an additional com-ponent of noise (abov e the
optimu m) to appear at th e outp utof the adap tiv e processor.
Th e ou tp ut power of the opt imum processor with a fixedweight
vector (17) is
E [ y op t2 ( h ) ]= WoptTRxxWopt= ST(CTRxx-C)- 5 .
A measure of the frac tion f addition al noise caused by
theadaptive algorithm operating in steady state in a
stationaryenvironment is termed misadjustment M ( p ) by Widrow
By assuming th at successive observation vectors [vectorsX@) of
ta p voltages] are independent and have componentsx l ( k ) , . . -
, X K L ( ~ ) hatare
ointlyGaussiandistributed,Moschner[20]calculatedvery ightbounds on
themisad-justment, using a methoddue oSenne [21],
[22].Foraconvergence con stan t p satisfying
1IO < p




























![THE ARCHITECTS ACT, 1972*architexturez.net/system/files/pdf/architects.act_.1972.pdf · THE ARCHITECTS ACT, 1972* No. 20 of 1972 [31st May, 1972] An Act to provide for the registration](https://img.pdfslide.us/doc/110x75/5e7bad6b8ce0624bb233ab49/the-architects-act-1972-the-architects-act-1972-no-20-of-1972-31st-may-1972.jpg)