Embed Size (px)
Citation preview
AppliedBiomechanicsBiomechanics
Pascal Madeleine
http://www.hst.aau.dk/~pm/ab/ab.html
FormålAt give indsigt i Biomekanik i relation til design og konstruktion af apparater
IndholdNewton mekanikNewton mekanikBiomekaniske målemetoderAntropometriIdrætErgonomiModellering
AB
mm 5 Human factors and systemsAnthropometri
Applied Biomechanics
mm 7 Applications in ErgonomicsConcepts, cumulative disorders
mm 8 Optimization in Ergonomics
Cumulative trauma disorders –repetitive stress injuriesp jOptimization in Ergonomics
mm8Pascal Madeleine AB
Neckshoulder
Biopsies: moth-eaten fibres
Model
MOTORCONTROL
OCCUPATIONALSETTINGS
PAIN INDEEP STRUCTURE
Risk factorsBoth physical and psychosocial factors are of interest and will influence the outcome.
The known physical factors are: - relatively fixed erect posture, - repetitive arm movements, - repetitive arm movements, - heavy work,- insufficient rest, - static posture and- vibrations- cold
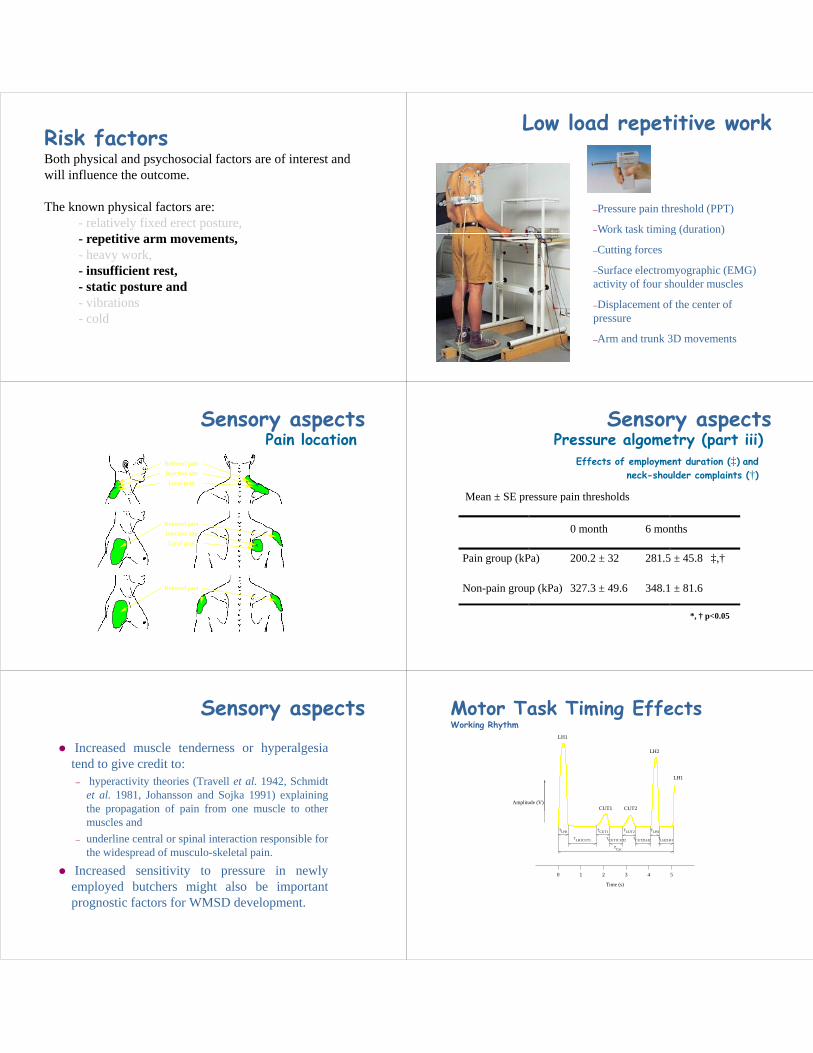
Low load repetitive work
–Pressure pain threshold (PPT)
–Work task timing (duration)–Work task timing (duration)
–Cutting forces
–Surface electromyographic (EMG) activity of four shoulder muscles
–Displacement of the center of pressure
–Arm and trunk 3D movements
Referred pain
Injection site
Local pain
Referred pain
Sensory aspectsPain location
Referred pain
Injection site
Local pain
Referred pain
Sensory aspectsPressure algometry (part iii)
Mean ± SE pressure pain thresholds
0 month 6 months
Effects of employment duration (‡) andneck-shoulder complaints (†)
0 month 6 months
Pain group (kPa) 200.2 ± 32 281.5 ± 45.8
Non-pain group (kPa) 327.3 ± 49.6 348.1 ± 81.6
‡,†
*, † p<0.05
Increased muscle tenderness or hyperalgesiatend to give credit to:– hyperactivity theories (Travell et al. 1942, Schmidt
et al. 1981, Johansson and Sojka 1991) explainingthe propagation of pain from one muscle to other
Sensory aspects
the propagation of pain from one muscle to othermuscles and
– underline central or spinal interaction responsible forthe widespread of musculo-skeletal pain.
Increased sensitivity to pressure in newlyemployed butchers might also be importantprognostic factors for WMSD development.
LH1
CUT1 CUT2
LH2
LH1
Amplitude (V)
Motor Task Timing EffectsWorking Rhythm
Time (s)
0 1 2 3 4 5
TLH1
TLH1CUT1
TCUT1 TCUT2 TLH2
TCUT1CUT2 TCUT2LH2
TCyc
TLH2LH1
Z dir.
X dir. Origo-Arm
Olecranon
Y dir.
X dir.
Y dir.
X dir.
Y dir.Z dir.TMaT/AnT
TAnA/MaA
TMaA/Lab
Z dir.
L2
TLab/MaT
AnCSTrunk AnCSArm
MaCSTrunk MaCSArm
Z dir.
X dir.
Y dir.
Origo-Trunk
ArmBody
Z dir.
(III)
(II)(I)
(IV)
[ ] [ ][ ] [ ]y R x dx y= +
3D analysis[ ] [ ][ ]y T xx y=
X dir.
Y dir.
LaCS
( )T R dMaT AnT MaT AnT MaT AnT/ / /,
( )T R dAnA MaA AnA MaA AnA MaA/ / /,
( )T R dMaA Lab MaA Lab MaA Lab/ / /,
( )T R dLab MaT Lab MaT Lab MaT/ / /, R R R R RArm AnA MaA MaA Lab Lab MaT MaT AnT= / / / /
R R RTrunk AnT MaT MaT Lab= / /
Effects of employment d iduration
0
1
2
3
4
5
6
7
ius
tus
nt.
ed.
Frm
s (µ
V/N
)
a
**
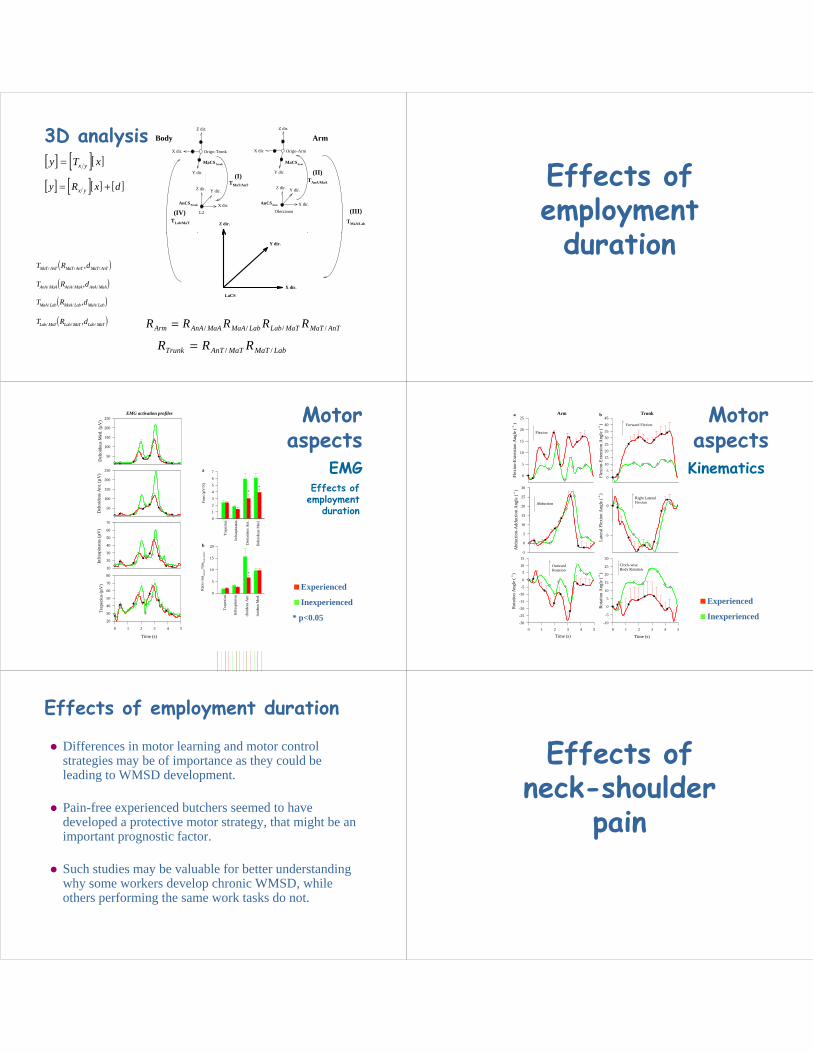
Motor aspects
EMGEffects of
employment duration
Del
toid
eus
Med
. (µV
)
50
100
150
200
250
Del
toid
eus
Ant
. (µ V
)
50
100
150
200
250
70
EMG activation profiles
0
5
10
15
20
30
40
50
60
70
MPF
(H
z)R
atio
rm
s activ
e/rm
s non-
activ
e
**
Tra
pezi
u
Infr
aspi
natu
Del
toid
eus
Ant
Del
toid
eus
Med
Tra
pezi
us
Infr
aspi
natu
s
Del
toid
eus
Ant
.
Del
toid
eus
Med
.
b
c
*
*
Experienced
Inexperienced
* p<0.05
Infr
aspi
natu
s (µ
V)
10
20
30
40
50
60
70
Time (s)
0 1 2 3 4 5
Tra
pezi
us (
µ V)
20
30
40
50
60
70
80
Flex
ion-
Ext
ensi
on A
ngle
( o )
0
5
10
15
20
25
dduc
tion
Ang
le (
o )
10
15
20
25
30
0
0
5
10
15
20
25
30
35
40
45a b
Flexion
Forward Flexion
Right LateralFlexionAbduction
Arm Trunk
lexi
on A
ngle
( o
)Fl
exio
n-E
xten
sion
Ang
le (
o )
Kinematics
Motor aspects
Abd
uctio
n-A
dd
-5
0
5
10
0 1 2 3 4 5
Rot
atio
n A
ngle
( o
)
-30
-25
-20
-15
-10
-5
0
5
10
15
-5
0 1 2 3 4 5
-10
-5
0
5
10
15
20
25
30
Time (s) Time (s)
OutwardRotation
Clock-wiseBody Rotation
Rot
atio
n A
ngle
( o
)L
ater
al F
leExperienced
Inexperienced
Effects of employment duration
Differences in motor learning and motor control strategies may be of importance as they could be leading to WMSD development.
Pain-free experienced butchers seemed to have Pain-free experienced butchers seemed to have developed a protective motor strategy, that might be an important prognostic factor.
Such studies may be valuable for better understanding why some workers develop chronic WMSD, while others performing the same work tasks do not.
Effects of neck-shoulder
ipain
Del
t. M
ed. (
µV)
25
50
75
100
125
Del
t. A
nt. (
µV)
25
50
75
100
125
50
50
100
150
200
250
50
100
150
200
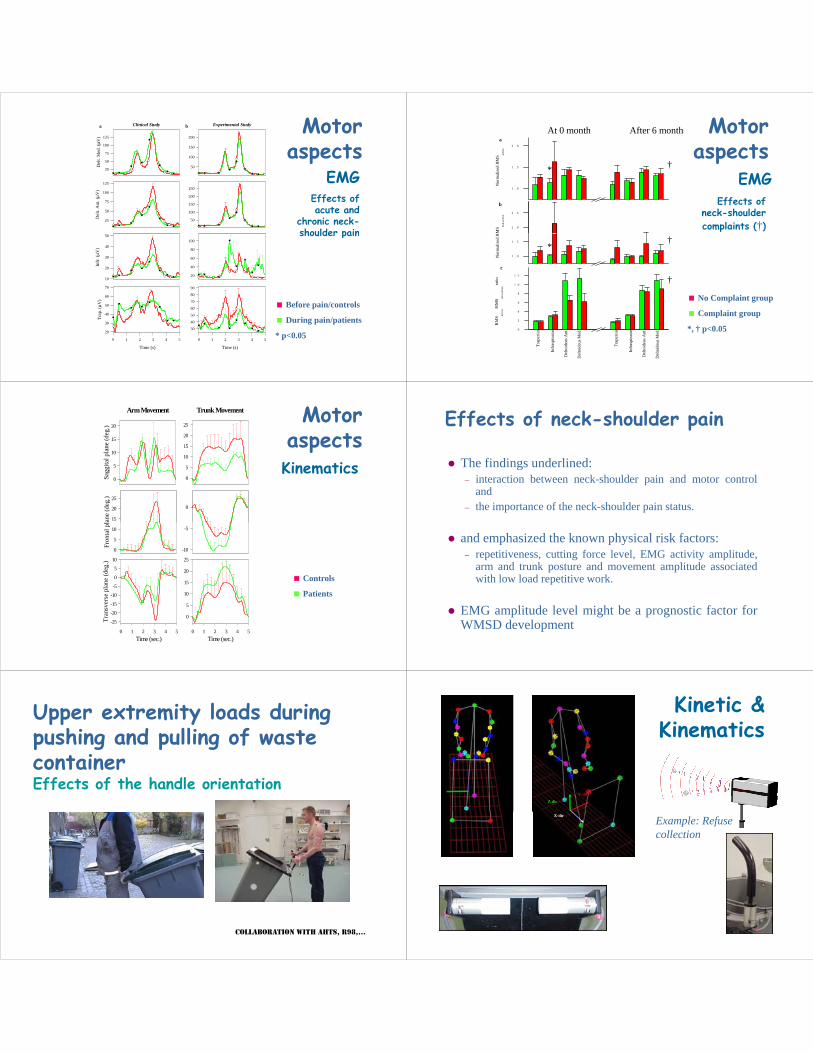
a bClinical Study Experimental Study
EMGEffects of acute and
chronic neck-shoulder pain
Motor aspects
Infr
. (µV
)
10
20
30
40
50
20
40
60
80
100
Time (s) Time (s)
0 1 2 3 4 5
Tra
p. (
µV)
20
30
40
50
60
70
0 1 2 3 4 5
30
40
50
60
70
80
90
Before pain/controls
During pain/patients
* p<0.05
shoulder pain RM
S non-
acti
ve
b
2 . 0
2 . 5
1 . 0
1 . 5
2 . 0
A f t e r 6 m o n t h sA t 0 m o n t h
Nor
mal
ized
RM
S acti
ve
a
†*
At 0 month After 6 months
EMGEffects of
neck-shoulder complaints (†)
Motor aspects
No Complaint group
Complaint group
*, † p<0.05
RM
Sac
tive/R
MS
non-
acti
ve
rat
io
c
Tra
pezi
us
Infr
aspi
natu
s
Del
toid
eus
Ant
.
Del
toid
eus
Med
.
Tra
pezi
us
Infr
aspi
natu
s
Del
toid
eus
Ant
.
Del
toid
eus
Med
.0
2
4
6
8
1 0
1 2
Nor
mal
ized
RM
1 . 0
1 . 5
*†
†
Sagg
ital p
lane
(de
g.)
0
5
10
15
20
pla
ne (
deg.
)
15
20
25
0
0
5
10
15
20
25
Arm Movement Trunk Movement
Kinematics
Motor aspects
Fro
ntal
pla
0
5
10
0 1 2 3 4 5
Tra
nsve
rse
plan
e (d
eg.)
-25
-20
-15
-10
-5
0
5
10
-10
-5
0 1 2 3 4 5
0
5
10
15
20
25
Time (sec.) Time (sec.)
Controls
Patients
Effects of neck-shoulder pain
The findings underlined:– interaction between neck-shoulder pain and motor control
and– the importance of the neck-shoulder pain status.
and emphasized the known physical risk factors:– repetitiveness, cutting force level, EMG activity amplitude,
arm and trunk posture and movement amplitude associatedwith low load repetitive work.
EMG amplitude level might be a prognostic factor forWMSD development
Upper extremity loads during pushing and pulling of waste containerEffects of the handle orientation
COLLABORATION WITH AHTS, R98,…
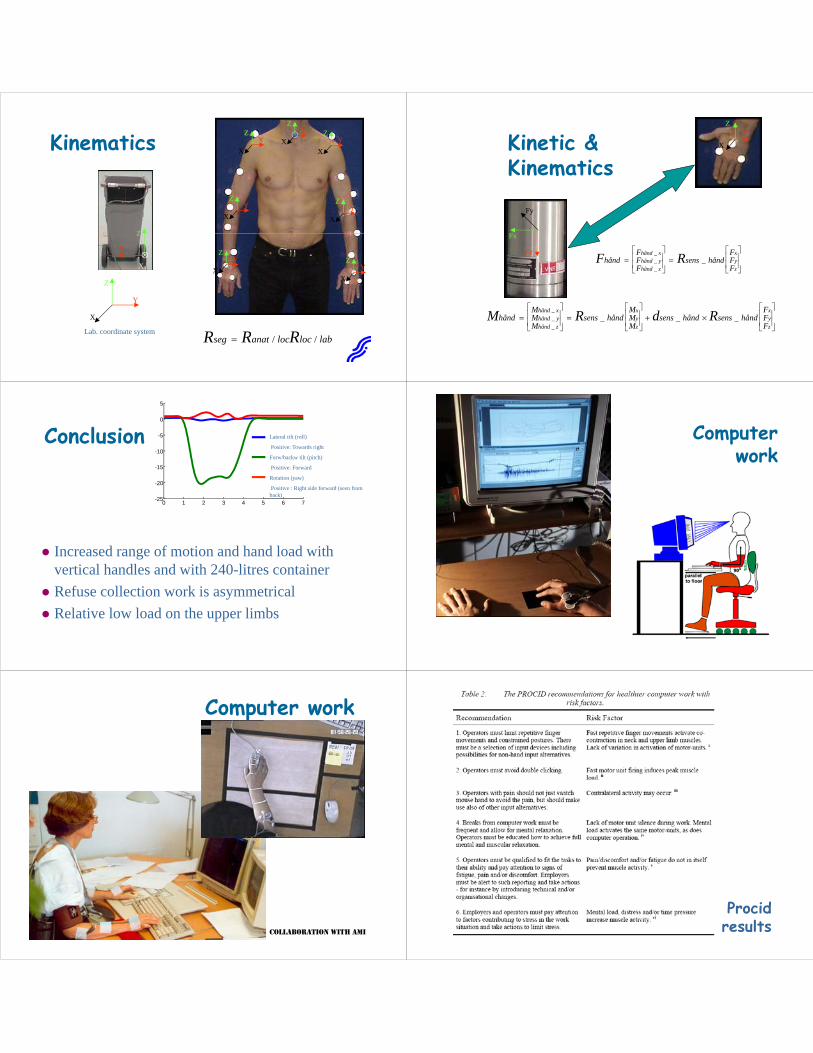
Kinetic & Kinematics
Y-dir
Z-dir
X-dir
Example: Refuse collection
Kinematics
YZ
X
YZ
X
YZ
X
YZ
X
YZ
X
Z
Y
Z
X
YZ
X YZ
X
Y
Z
X
labloclocanatseg RRR //=Lab. coordinate system
Kinetic & Kinematics
YZ
X
Fx
Fy
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡=⎥
⎥
⎦
⎤
⎢⎢
⎣
⎡=
z
y
x
zhånd
yhånd
xhånd
FFF
håndsensFFF
hånd RF __
__
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡×+⎥
⎥
⎦
⎤
⎢⎢
⎣
⎡=⎥
⎥
⎦
⎤
⎢⎢
⎣
⎡=
z
y
x
z
y
x
zhånd
yhånd
xhånd
FFF
håndsenshåndsensMMM
håndsensMMM
hånd RdRM ____
_
_
Fz
Fx
Conclusion
0 1 2 3 4 5 6 7-25
-20
-15
-10
-5
0
5
Lateral tilt (roll)
Positive: Towards right
Forw/backw tilt (pitch)
Positive: Forward
Rotation (yaw)
Positive : Right side forward (seen from back)
Increased range of motion and hand load with vertical handles and with 240-litres container
Refuse collection work is asymmetrical
Relative low load on the upper limbs
Computerwork
Computer work
COLLABORATION WITH AMI
Procid results
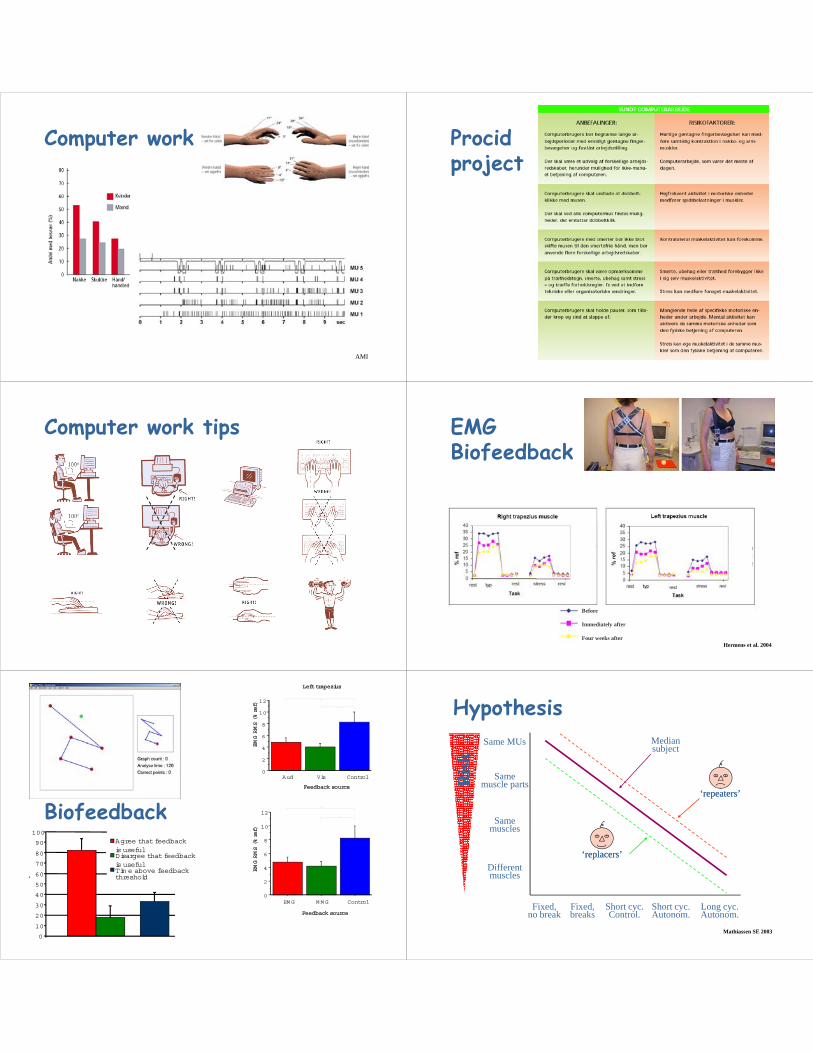
Computer work
AMI
Procidproject
Computer work tips EMGBiofeedback
Hermens et al. 2004
Before
Immediately after
Four weeks after
Biofeedback
0
2
4
6
8
10
12
EMG RMS (%ref)
Aud Vis Control
Left trapezius
Feedback source
*
*
12*Biofeedback
0
10
20
30
40
50
60
70
80
90
100Agree that feedback is usefulDisargee that feedback is usefulTim e above feedbackthreshold%
0
2
4
6
8
10
12
EM G M M G Control
Feedback source
*
EMG RMS (%ref)
Hypothesis
Ris
kR
isk
Same MUs
Samemuscle parts
Median subject
‘repeaters’‘repeaters’
Mathiassen SE 2003
Fixed,no break
Fixed,breaks
Short cyc.Control.
Short cyc.Autonom.
Long cyc.Autonom.
Samemuscles
Differentmuscles
‘replacers’‘replacers’
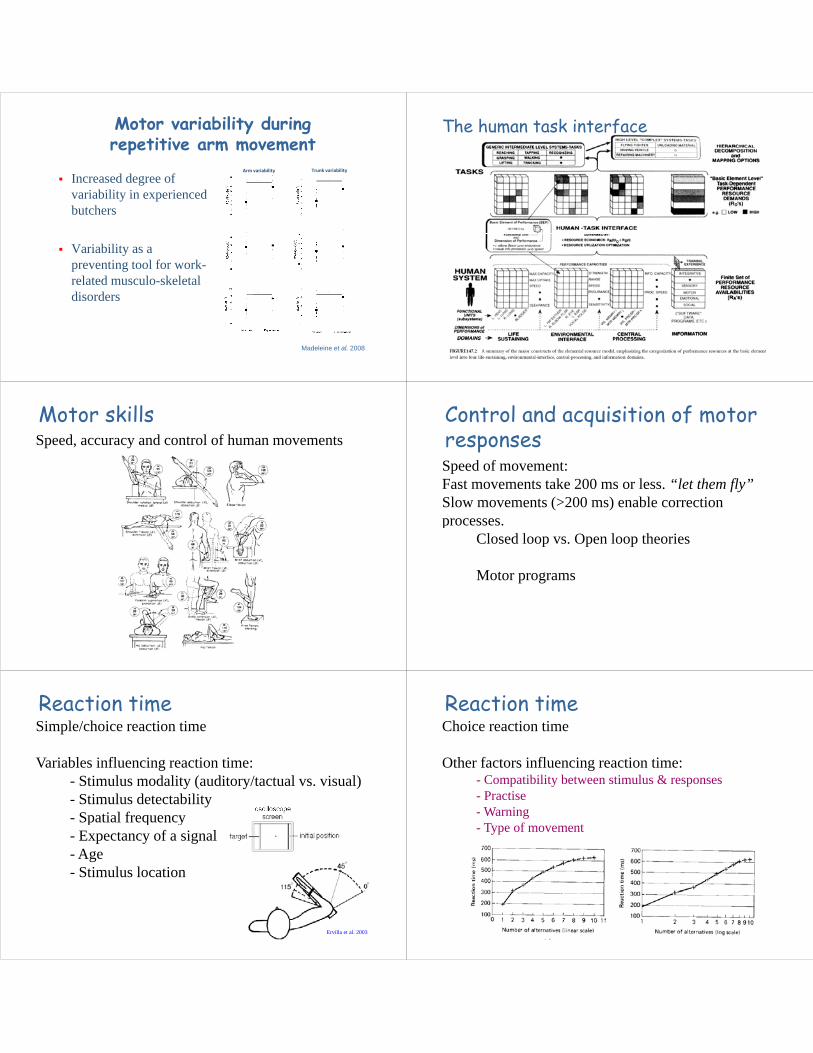
Trunk variability
* *
Arm variability Trunk variability
Increased degree of variability in experienced butchers
Motor variability during repetitive arm movement
* *
Variability as a preventing tool for work-related musculo-skeletaldisorders
Madeleine et al. 2008
The human task interface
Motor skillsSpeed, accuracy and control of human movements
Control and acquisition of motor responsesSpeed of movement:Fast movements take 200 ms or less. “let them fly”Slow movements (>200 ms) enable correction processes.processes.
Closed loop vs. Open loop theories
Motor programs
Reaction timeSimple/choice reaction time
Variables influencing reaction time: - Stimulus modality (auditory/tactual vs. visual)- Stimulus detectability- Spatial frequency- Spatial frequency- Expectancy of a signal- Age- Stimulus location
Ervilla et al. 2003
Reaction timeChoice reaction time
Other factors influencing reaction time: - Compatibility between stimulus & responses- Practise- Warning- Warning- Type of movement- More than one stimulus
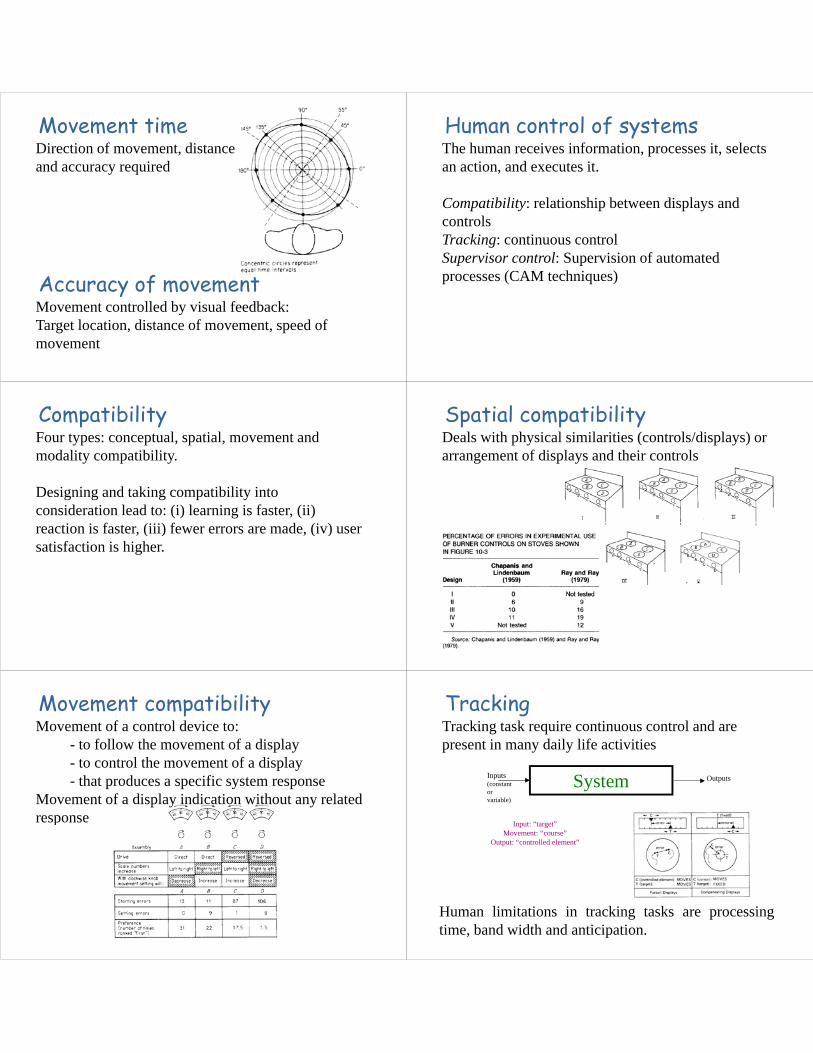
Movement timeDirection of movement, distanceand accuracy required
Accuracy of movementMovement controlled by visual feedback:Target location, distance of movement, speed of movement
Human control of systemsThe human receives information, processes it, selects an action, and executes it.
Compatibility: relationship between displays and controlsTracking: continuous controlTracking: continuous controlSupervisor control: Supervision of automated processes (CAM techniques)
CompatibilityFour types: conceptual, spatial, movement and modality compatibility.
Designing and taking compatibility into consideration lead to: (i) learning is faster, (ii) reaction is faster, (iii) fewer errors are made, (iv) user reaction is faster, (iii) fewer errors are made, (iv) user satisfaction is higher.
Spatial compatibilityDeals with physical similarities (controls/displays) or arrangement of displays and their controls
Movement compatibilityMovement of a control device to:
- to follow the movement of a display- to control the movement of a display- that produces a specific system response
Movement of a display indication without any related responseresponse
TrackingTracking task require continuous control and are present in many daily life activities
SystemInputs(constant or variable)
Outputs
Input: “target”Movement: “course”
Output: “controlled element”
Human limitations in tracking tasks are processingtime, band width and anticipation.
Supervisory controlSupervisory control in the context of human computer systems derives from the human analogy (supervisor/subordinate interactions).Attributes: planning, teaching, monitoring, intervening and learning
Skill-, knowledge-, rule-based behaviour
Controls and data entry devicesExamination of the more common types of control devices and some of the factors which influence their use by humans.See appendix B for recommendations.
Function of controls: Transmit control information Function of controls: Transmit control information (either discrete or continuous) to some device, mechanism, or system.
Factors in control designIdentification of controls – shape, texture,size, location, color, label coding of controls
Exampleofcontroldevices
Visual, perception, handicap, maintenance
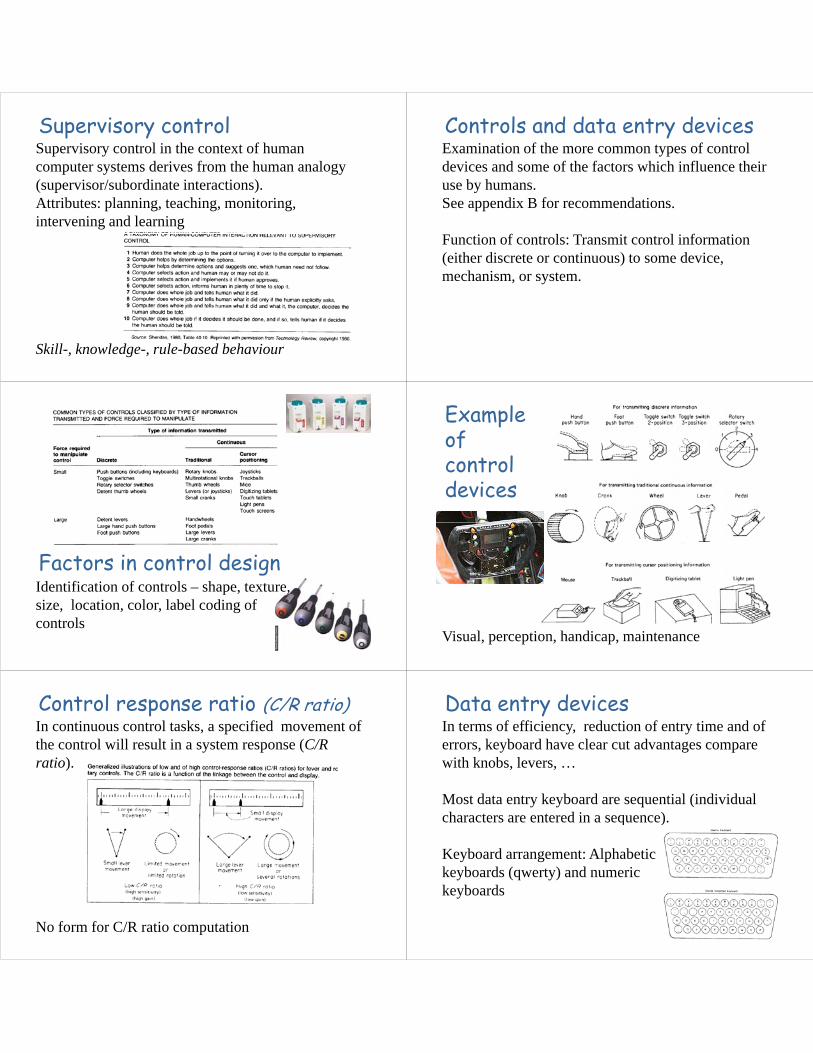
Control response ratio (C/R ratio)In continuous control tasks, a specified movement of the control will result in a system response (C/R ratio).
No form for C/R ratio computation
Data entry devicesIn terms of efficiency, reduction of entry time and of errors, keyboard have clear cut advantages compare with knobs, levers, …
Most data entry keyboard are sequential (individual characters are entered in a sequence).characters are entered in a sequence).
Keyboard arrangement: Alphabetickeyboards (qwerty) and numerickeyboards
Keyboard feel
Keypads (membrane)
Keyboard
Split and tilted keyboard
Handwritten and gestural data entry
Cursor positioning devicesTouch screen, light pen, graphic tablets,…
Tab 11.5
Controls and Data entries devices
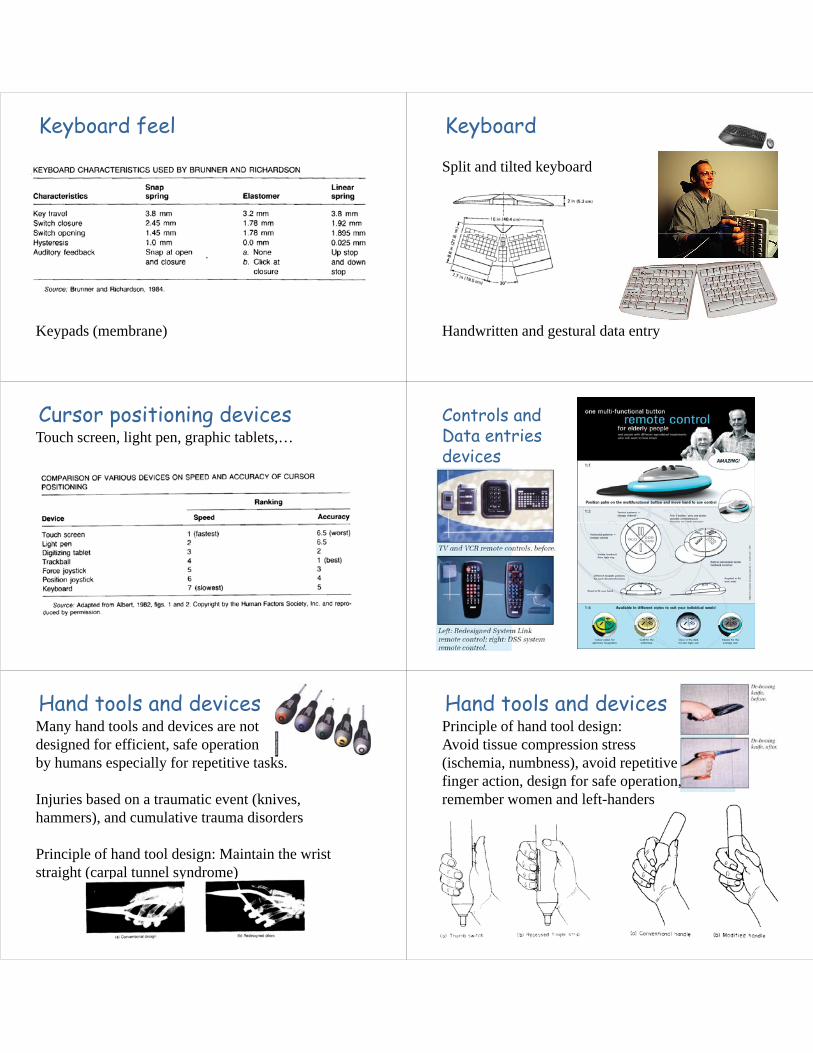
Hand tools and devicesMany hand tools and devices are not designed for efficient, safe operation by humans especially for repetitive tasks.
Injuries based on a traumatic event (knives, hammers), and cumulative trauma disordershammers), and cumulative trauma disorders
Principle of hand tool design: Maintain the wrist straight (carpal tunnel syndrome)
Hand tools and devicesPrinciple of hand tool design: Avoid tissue compression stress (ischemia, numbness), avoid repetitivefinger action, design for safe operation,remember women and left-handers
Hand tools and devicesEvaluation of alternative design: Example: toothbrush design, multiple function dental syringe
Take home messages
Optimization in ergonomics Manual Material HandlingManual Material HandlingMotor skillsHuman control of SystemControl and data entries devicesHand tool and devices





![[0123130] Appendices 1 - repository.maranatha.edu fileLAMPIRAN 1 Data Antopometri Buku Eko Nurmianto L1-2 dan Handbook of Ergonomic Gambar 5.2a. Antropometri tubuh manusia yang diukur](https://img.pdfslide.us/doc/110x75/5d55847388c99354378b9ba4/0123130-appendices-1-1-data-antopometri-buku-eko-nurmianto-l1-2-dan-handbook.jpg)























