Embed Size (px)
Citation preview

A
Practical Training Seminar Report
On
“COMMUNICATION NAVIGATIONAL SURVILLANCE”
Guided by : Submitted By:Mr. Kamlesh Kumar Raghav Rajvanshi(Sr. Manager, Airports Authority Of India) (IV Yr, ECE Dept., PCE, Jaipur)
Department of Electronics and Communication EngineeringPoornima College Of Engineering
Jaipur

DECLARATION
This is to certify that all the research and project work described
below is a part of one month industrial training is done by Raghav
Rajvanshi, IV year Electronics and Communication Engineering,
Poornima College Of Engineering, Jaipur, under the proper
guidance from the company officials and no confidential data
related to the company has been disclosed in the report.
Raghav Rajvanshi
(IV yr, ECE Dept)
(Poornima College Of Engineering, Jaipur)
2

ACKNOWLEDGEMENT
Its a great pleasure to present this report of summer training in
AIRPORTS AUTHORITY OF INDIA (JAIPUR) in partial fulfillment of
B-TECH Programme under Poornima College Of Engineering, affiliated
to Rajasthan Technical University, Kota. At the outset, I would like to
express my immense gratitude to my training guide Mr. Kamlesh Kumar
(Sr. Manager, Airports Authority Of India) for guiding me right from the
inception till the successful completion of the training.
I am falling short of words for expressing my feelings of gratitude
towards him for extending his valuable guidance about technology,
equipments and support for literature, critical reviews of project and the
report and above all the moral support he had provided me with all
stages of this training.
I would also like to thank my friends and all my group members for their
help and cooperation throughout the training
Raghav Rajvanshi
(IV yr, ECE Dept)
(Poornima College Of Engineering, Jaipur)
3

Contents
1. Introduction…………………………….…………...………….07
1.1 Functions of AAI
1.2 International Projects
1.3 Organizational Structure
2.Security System………………………………………………….10
2.1 Security Equipments
2.1.1 X-BIS
2.1.2 WTMD
2.1.3 HHMD
2.1.4 ETD
2.2 FIDS
2.3 PA System
3. Communication Equipments……………………………...….17
3.1 Air to Ground Communication
3.1.1 Air Traffic Control
3.1.2 The DR100 multimode VHF receiver
3.2 Ground-to-Ground Communication
3.2.1 Wacky-Talky
3.3 Other Important Equipments
3.3.1 DVTR
3.3.2 DATIS
3.4 Conversions
4

4. IT Unit………………………………………………………..….24
4.1 Functions of IT.
4.2 Basics
4.2.1 Hub
4.2.2 Switch
4.2.3 Router
4.3 Networking
4.3.1 LAN
4.3.2 WAN
4.3.3 Internet
4.4 Network Topologies
4.4.1 Bus
4.4.2 Star
4.4.3 Ring
4.4.4 Mesh
5. Navigation………………………………………………………….34
5.1 Navigational aids
5.1.1 ILS
5.1.2 DME
5.1.3 DVOR
6. References……………………………………..…………….……46
5

Figure Index
Figure 1 ------ X-BIS System
Figure 2 ------ WTMD
Figure 3 ------ HHMD
Figure 4 ------ ETD
Figure 5 ------ DR 100
Figure 6 ------ Block Diagram Of DR 100
Figure 7 ------ LAN
Figure 8 ------ WAN
Figure 9 ------ Bus Network
Figure 10 ------ Star Network
Figure 11 ------ Ring Network
Figure 12 ------ Mesh Network
Figure 13 ------ The emission patterns of the localizer and glideslope
signals
Figure 14 ------ ILS
6

1.Introduction
The Airports Authority of India (AAI) (Hindi: भा�रती�य वि�मा�नपत्तन प्रा�धि�करण) is an
organization working under the Ministry of Civil Aviation that manages all the airports in
India. The AAI manages and operates 126 airports including 12 international airports, 89
domestic airports and 26 civil enclaves.The corporate headquarters(CHQ) are at Rajiv
Gandhi Bhawan, Safdarjung Airport, New Delhi. V.P Agrawal is the current chairman of
the AAI.
The Airports Authority of India (AAI) was formed on 1st April 1995 by merging the
International Airports Authority of India and the National Airports Authority with a view
to accelerate the integrated development, expansion and modernization of the operational,
terminal and cargo facilities at the airports in the country conforming to international
standards. AAI provides air navigation services over 2.8 million square nautical miles of
airspace.
The new domestic terminal building at Jaipur Airport was inaugurated on 1 July 2009. The
new terminal has an area of 22,950 sqm, is made of glass and steel structure having
modern passenger friendly facilities such as central heating system, central air
conditioning, inline x-ray baggage inspection system integrated with the departure
conveyor system, inclined arrival baggage claim carousals, escalators, public address
system, Flight information display system (FIDS), CCTV for surveillance, Airport check-
in counters with Common Use Terminal Equipment (CUTE), car parking, etc. The
International Terminal Building has peak hour passenger handling capacity of 500
passengers and annual handling capacity of 4 lakhs.
7

The entrance gate, made of sandstone and Dholpur stones along with Rajasthani paintings
on the walls, give tourists a glimpse of the Rajasthani culture. Two fountains on both sides
of the terminal, dotted with palm trees, ensure that normal temperature is maintained
within the airport premises. The transparent side walls of the building have adjustable
shades that control the passage of sunlight into the airport premises, thereby cutting down
heavily on electricity bills.
1.1 Functions of AAI
To control and manage the entire Indian airspace (excluding the special user
airspace) extending beyond the territorial limits of the country, as accepted by
ICAO.
To Design, Construct, Operate and Maintain International Airports, Domestic
Airports, Civil Enclaves at Defence Airports.
Development and Management of Cargo Terminals at Airports.
Provision of Passenger Facilities and Information System at the Passenger
Terminals at airports.
Expansion and strengthening of operation area viz. Runways, Aprons, Taxiway,
etc
Provision of visual aids.
8

Provision of Communication and Navigational aids viz. ILS, DVOR, DME,
Radar, etc.
1.2 International Projects
The AAI has been involved in various consultancy projects
with Libya, Algeria, Yemen, Maldives, Nauru and Afghanistan The AAI also provides
trained personnel for operation, maintenance and management of airports in these countries
1.3 Organizational Structure
9

2. Security System
The main objectives of the Security system are as follows:
Prevent attacks on airports or aircrafts.
Prevents accidents & fatalities due to transport of hazardous materials.
To ensure safety & security of passengers.
10

2.1 Security Equipments
The main security equipments are-
1. X-BIS
2. WTMD
3. HHMD
4. ETD
5. CCTV
2.1.1 X-BIS
The luggage carried by the passengers is checked by using the X-Ray Baggage Inspection
System.
Generation of X-Rays
X-Ray is generated when a very high voltage DC supply is applied between cathode and
anode in a vacuum tube. When Cathode heats up , electrons are emitted. These electron
moves from cathode to anode. When there is change in energy of electron X-Ray generates
and passes through a 1mm hole in the form of narrow beam. Beam direction is set at the
angle of 45 degree diagonally so as to cover the total area as well as to make 3-D
projection.
11

Figure 1 (X-BIS System)
Specifications
Tunnel Dimensions 620(w)*418(h)[mm]
Max. Object size 615(w)*410(h)[mm]
Conveyor Speed 0.2m/sec.
12

Max. Conveyor load even distributed 160kg.
Operation
When the start key is pressed from the keyboard then the command goes to the
microprocessor, then to the interface board. The interface board starts the motor hence
conveyor belt starts running. But at this time X-Rays doesn’t generate. The speed of
conveyor belt is normally 0.2m/sec. When baggage is run on the conveyor belt and passes
through the light barriers then interruption occurs. The microprocessor reads the interrupt
through interface board. Microprocessor again gives the command to the X-Ray generator
to generate X-Rays through the interface board. X-Rays falls on the baggage some absorb
and rest passes through it. The X-Rays now converts into the voltage by a transducer. Now
a VGA (Voltage Graphic Adopter) converts the input voltage signal into the output graphic
image on the monitor. At the monitor slice-by-slice screening is achieved. The X-BIS
shows the different color patterns according to the material inside the baggage, such as: -
1. Organic : Orange color
2. Inorganic : Green
3. Metal : Blue
The X-BIS contain the emergency stop switches from the safety point of view.
2.1.2 WTMD
13

The metal objects which passengers a carrying with them is detected during passenger
screening by WTMD. The system is used for weapons detection as well as passenger
screening.
Main components are-
1. Transmitter panel (TX)
2. Receiver panel (RX)
3. Cross piece.
4. Remote control unit.
5. Electronics unit. Figure 2 (WTMD)
The operation of WTMD is based on “electromagnetic pulsed-field technology”.
Transmitter pulses causes decaying eddy currents in metal objects inside the sensing area
of the WTMD. The signal induced to the receiver by the eddy currents is sampled and
processed in the electronic unit. Moving metal objects are detected when the signal
exceeds the alarm threshold. The individual detection zones producing superior
discrimination detect metal objects at different heights separately.
14

2.1.3 HHMD
Figure 3 (HHMD)
Hand Held Metal Detector is based on the principle of Electromagnetic induction. A
Hand Held Metal Detector is also used to detect metal and objects passengers are carrying
with them. Basic principle is whenever there is change in magnetic links of force
associated with a conductor an EMF is generated.
It consists of two coils, primary and secondary or transmitter and receiver coil. Transmitter
and receiver coils are isolated to each other. When the switch is ON HHMD starts
working, as soon as it set to check the metal or non metal due to change in magnetic field
eddy currents are being traced from the metal. A threshold is set for the HHMD below this
no alarm ring but when the magnetic field cross the threshold then audio and visual alarm
ring.
15

2.1.4 ETD
Figure 4 (ETD)
An Explosive Trace Detector is used to detect the explosives and narcotics. It consists
normally a vacuum tube. The operator on swap takes a sample from the luggage. In the
ETD machine the sample is melted and then vaporized, by applying high voltage. Thus
there is displacement occurs in the atomic weight of the substance. By the LUT (Look Up
Table) the displacement can be measured, and thus substance can be detected. The screen
of ETD shows the information about the sample with necessary graph etc.
2.2 FIDS
A Flight Information Display system (FIDS) is a computer system used in airports to
display flight information to passengers, in which a computer system controls mechanical
or electronic display boards or TV screens in order to display arrivals and departures flight
information in real-time. The displays are located inside or around an airport terminal. A
virtual version of a FIDS can also be found on most airport websites and teletext systems.
In large airports, there are different sets of FIDS for each terminal or even each major
airline. FID systems are used to assist passengers during air travel and people who want to
pick-up passengers after the flight.
16

Each line on an FIDS indicates a different flight number accompanied by:
the airline name/logo and/or its IATA or ICAO airline designator
the city of origin or destination, and any intermediate points
the expected arrival or departure time and/or the updated time (reflecting any
delays)
the gate number
the check-in counter numbers or the name of the airline handling the check-in
the status of the flight, such as "Landed", "Delayed", "Boarding", etc.
Due to code sharing, one single flight may be represented by a series of different flight
numbers, thus lines (for example, LH474 and AC9099), although one single aircraft
operates that route at that given time. Lines may be sorted by time, airline name, or city.
2.3 PA System
It is called Public Address System. At the Airport it is use to address the passengers.
Information about the arrival and departure of flights, security checking etc is announced
by this system. Here three or more power amplifiers are used in series to amplify the audio
power from where the audio output is announced in different sections through
loudspeakers.
17

3. Communication Equipments
It can be categorized into two parts :
3.1 Air to Ground Communication
It works on very high frequency range i.e. 30MHz-300MHz. Transmitter frequency at
Jaipur Airport is 125.250MHz.An Equipment Room contains the VHF equipment as well
as the remote control of other navigational equipment. Staggered Dipole Antenna is used in
Omni direction for this purpose. Amplitude Modulation is used for communication.
3.1.1 Air traffic control (ATC)
Air traffic control (ATC) is a service provided by ground-based controllers who direct
aircraft on the ground and in the air. The primary purpose of ATC systems worldwide is to
separate aircraft to prevent collisions, to organize and expedite the flow of traffic, and to
provide information and other support for pilots when able.[1] In some countries, ATC may
also play a security or defense role (as in the United States), or be run entirely by the
military (as in Brazil).
Preventing collisions is referred to as separation, which is a term used to prevent aircraft
from coming too close to each other by use of lateral, vertical and longitudinal separation
minima; many aircraft now have collision avoidance systems installed to act as a backup to
ATC observation and instructions. In addition to its primary function, the ATC can provide
additional services such as providing information to pilots, weather and navigation
information and NOTAMs (NOtices To AirMen).
18

Depending on the type of flight and the class of airspace, ATC may issue instructions that
pilots are required to follow, or merely flight information (in some countries known as
advisories) to assist pilots operating in the airspace. In all cases, however, the pilot in
command has final responsibility for the safety of the flight, and may deviate from ATC
instructions in an emergency.
3.1.2 The DR100 multimode VHF receiver
It is a communication unit specifically designed to operate as radio core part of Air Traffic
Control ground stations. It supports a huge number of operating modes, ranging from the
traditional AM-DSB mode for analog speech communications, to the latest VDL 3 and 4
modes for voice and data links.
Figure 5 (DR 100)
Due to its DSP (Digital Signal Processing)-based architecture, software-radio approach,
and modular design, it allows easy update and re-configuration in terms of type of
modulation, channel spacing and interface to external controllers.
The equipment has outstanding performances in terms of noise radiation and unwanted
emissions together with the high grade of immunity to external interference.
19

This equipment has been designed to fulfill operating requirements in any possible system
layout. This results in an extreme degree of flexibility and operability. It can also be used
as direct replacement of analog VHF equipment in traditional ATC systems.
Power consumption Transmitter : - 400 W (DC main)
Power consumption Receiver : - 40 W (DC main)
Efficiency : - 10%
Operating frequency band : - 108 to 156 MHz
Technical Description and Architecture
The DR100 comprises independent modules, each of them accomplishing a different and
specific function. The equipment can be provided in different configurations according to
the type of fitted modules. The following block diagram highlights the modularity of
DR100.
The following are the different modules of DR 100 Multimode VHF receiver: -
1. Receiver module (RX)
2. Base Band module (BB)
3. Power Supply Unit (PSU)
4. IMC/MSIC cards
5. Control Panel (standard and enhanced HMI)
20

6. Line Barrier card (e.g. ALB_S, ALB_M)
Figure 6 (Block Diagram Of DR 100)
The Receiver module mainly performs the related radio frequency functions. The
RX module is based on a super-heterodyne layout that provides the full down-
conversion of received AM-DSB/D8PSK/GFSK modulated RF signals, and
amplification to required level for the analogue to digital conversion. The RX
module sends the digitized I/Q format data stream to the Base band module via an
RS422 serial interface
21

The BB module handles carrier digital processing. The Base band module is a full
digital module that is mainly charged of carrier processing and the associated
control tasks. The type and amount of BB signal processing tasks is dependent on
the operating mode (AM-DSB or VDL mode
The PSU module provides all the required internal supply voltages for DR100
modules operation. It also provides EMI filtering and over-voltage/under-voltage
line protections. It is fed by external DC power source.
The AC/DC converter module provides a DC output to feed the PS module by
conversion of the 110 - 230 VAC main supply.
The IMC card, located on cPCI back plane, is the simplest management card, that
allows for DR100 full O&M tasks management, interfacing with Analogue Line
Barrier cards, supporting of VDL modes default data interface to an external station
controller through an RS232 port.
The MSIC card alternative to IMC is still located on cPCI back plane. It is the full-
sized management card that, in addition to IMC features,
The Control Panel, which is managed by the IMC or MSIC, absolves any local
HMI functions. Two types of Control Panels are available:
The Standard-HMI Control Panel
The Enhanced-HMI Control Panel
22

Analogue Line Barrier (ALB), are used in AM-DSB and AM-DATA mode, when
the equipment must process analogue speech communication, and analogue
interfacing with external Voice Communication Switching Systems, or external
ACARS modem.
3.2 Ground-to-Ground Communication
3.2.1 Walkie-Talkie
A walkie-talkie, or handie talkie, (more formally known as a handheld transceiver) is a
hand-held, portable, two-way radio transceiver. Its development during the Second World
War has been variously credited to Donald L. Hings, radio engineer Alfred J. Gross, and
engineering teams at Motorola. Similar designs were created for other armed forces, and
after the war, walkie-talkies spread to public safety and eventually commercial and jobsite
work. Major characteristics include a half-duplex channel (only one radio transmits at a
time, though any number can listen) and a "push-to-talk" (P.T.T) switch that starts
transmission. Typical walkie-talkies resemble a telephone handset, possibly slightly larger
but still a single unit, with an antenna sticking out of the top. Where a phone's earpiece is
only loud enough to be heard by the user, a walkie-talkie's built-in speaker can be heard by
the user and those in the user's immediate vicinity. Hand-held transceivers may be used to
communicate between each other.
It’s frequency at Jaipur Airport is 166.2 Mhz.
23

3.3 Other Important Equipments
3.3.1 Digital Voice Tape Recorder
The Digital Voice Tape Recorder is used for audio recording and it can record 24 channels
simultaneously. Recording is done on magnetic tape and saved about 2 months.
3.3.2 Digital Airport Terminal Information System
A DATIS gives the information about weather, runway condition etc. to the aircraft from
ATC (Air Traffic Control). It repeats the same information again within 15 seconds.
3.4 Conversions
Decibel or dB is defined by logarithmic ratio of output by input (power and
voltages).
dB= 10log(pout/Pin)
Pout = Output Power
Pin = Input Power
A dBm is a decibel relative to 1 mW. It is defined by the decibel equation with Pin
set at 1*10-3.
dBm = 10 log Pout
1* 10-3
24

A dBW is a decibel with respect to 1W.
dBW = 10log {Pout/1W}
4. IT Unit
IT or the information technology is used basically for transmitting and receiving the
information from one place to another place, fast and in an efficient way.
4.1 Functions of IT Department
Planning & implementation of suitable information security & protection system
with FIREWALL to ensure safety & security of Database & prevention of
unauthorized access to AAI server.
Planning & implementation of AAI Internet. LAN /WAN planning connecting all
AAI establishment throughout the country on AAI Internet.
Standardization of IT systems, procurement, implementation & integration.
Integration of all existing systems with AAI Internet.
25

Development & hosting of AAI website & website management. Use of Web based
Information Technology as strategic business tool to improve the business process
& efficiency of the Organization.
Internet & E-mail services to all the executives of AAI & sections on need basis,
initially using dial-up & subsequently using Leased Line & AAI Proxy Server.
Hyper link connection for downloading of information on latest flight schedules,
arrival/departures of flights on registration basis to third parties such as Hotels,
Tour & Travel Operators, Cell Phone & Cable Operators etc.
Planning, development & commissioning of Centralized Software & other
application using Centralized Database Servers & Web Enable Application
Software.
Assessment & planning of IT related Training & in-house application development.
4.2 Basics
4.2.1Hub
In general, a hub is the central part of a wheel where the spokes come together. The term is
familiar to frequent fliers who travel through airport "hubs" to make connecting flights
from one point to another. In data communications, a hub is a place of convergence where
data arrives from one or more directions and is forwarded out in one or more other
directions. A hub usually includes a switch of some kind. (And a product that is called a
"switch" could usually be considered a hub as well.) The distinction seems to be that the
hub is the place where data comes together and the switch is what determines how and
26

where data is forwarded from the place where data comes together. Regarded in its
switching aspects, a hub can also include a router.
1) In describing network topologies, a hub topology consists of a backbone (main circuit)
to which a number of outgoing lines can be attached ("dropped"), each providing one or
more connection port for device to attach to. For Internet users not connected to a local
area network, this is the general topology used by your access provider. Other common
network topologies are the bus network and the ring network. (Either of these could
possibly feed into a hub network, using a bridge.)
2) As a network product, a hub may include a group of modem cards for dial-in users, a
gateway card for connections to a local area network (for example, an Ethernet or a Token
Ring), and a connection to a line (the main line in this example).
4.2.2Switch
In a telecommunications network, a switch is a device that channels incoming data from
any of multiple input ports to the specific output port that will take the data toward its
intended destination. In the traditional circuit-switched telephone network, one or more
switches are used to set up a dedicated though temporary connection or circuit for an
exchange between two or more parties. On an Ethernet local area network (LAN), a switch
determines from the physical device (Media Access Control or MAC) address in each
incoming message frame which output port to forward it to and out of. In a wide area
27

packet-switched network such as the Internet, a switch determines from the IP address in
each packet which output port to use for the next part of its trip to the intended destination
4.2.3Router
In packet-switched networks such as the Internet, a router is a device or, in some cases,
software in a computer, that determines the next network point to which a packet should be
forwarded toward its destination. The router is connected to at least two networks and
decides which way to send each information packet based on its current understanding of
the state of the networks it is connected to. A router is located at any gateway (where one
network meets another), including each point-of-presence on the Internet. A router is often
included as part of a network switch.
4.3Networking
In information technology, networking is the construction, design, and use of a network,
including the physical (cabling, hub, bridge, switch, router, and so forth), the selection and
use of telecommunication protocol and computer software for using and managing the
network, and the establishment of operation policies and procedures related to the network.
4.3.1 Local Area Network (LAN).
28

A local area network (LAN) is a group of computers and associated devices that share a
common communications line or wireless link. Typically, connected devices share the
resources of a single processor or server within a small geographic area (for example,
within an office building). Usually, the server has applications and data storage that are
shared in common by multiple computer users. A local area network may serve as few as
two or three users (for example, in a home network) or as many as thousands of users
Figure 7 (Local Area Network)
4.3.2 Wide Area network (WAN)
A wide area network (WAN) is a geographically dispersed telecommunications network.
The term distinguishes a broader telecommunication structure from a local area network
(LAN). A wide area network may be privately owned or rented, but the term usually
29

connotes the inclusion of public (shared user) networks. An intermediate form of network
in terms of geography is a metropolitan area network (MAN).
Figure 8 (Wide Area Network)
4.3.3. Internet
The Internet, sometimes called simply "the Net," is a worldwide system of computer
networks - a network of networks in which users at any one computer can, if they have
permission, get information from any other computer (and sometimes talk directly to users
at other computers). It was conceived by the Advanced Research Projects Agency (ARPA)
of the U.S. government in 1969 and was first known as the ARPANET. The original aim
was to create a network that would allow users of a research computer at one university to
be able to "talk to" research computers at other universities. A side benefit of ARPANet's
design was that, because messages could be routed or rerouted in more than one direction,
the network could continue to function even if parts of it were destroyed in the event of a
military attack or other disaster.
Today, the Internet is a public, cooperative, and self-sustaining facility accessible to
hundreds of millions of people worldwide. Physically, the Internet uses a portion of the
30

total resources of the currently existing public telecommunication networks. Technically,
what distinguishes the Internet is its use of a set of protocols called TCP/IP (for
Transmission Control Protocol/Internet Protocol).
The most widely used part of the Internet is the World Wide Web (often abbreviated
"WWW" or called "the Web"). Its outstanding feature is hypertext, a method of instant
cross-referencing. In most Web sites, certain words or phrases appear in text of a different
color than the rest; often this text is also underlined. When you select one of these words or
phrases, you will be transferred to the site or page that is relevant to this word or phrase.
Sometimes there are buttons, images, or portions of images that are "clickable." If you
move the pointer over a spot on a Web site and the pointer changes into a hand, this
indicates that you can click and be transferred to another site.
4.4 Network Topologies
4.4.1 Bus:
A bus network is an arrangement in a local area network (LAN) in which each node
(workstation or other device) is connected to a main cable or link called the bus. The
31

illustration shows a bus network with five nodes. Each node is shown as a sphere, the bus
appears as a heavy horizontal line, and connections to the bus appear as vertical lines.
Figure 9
A bus network is simple and reliable. If one node fails to operate, all the rest can still
communicate with each other. For a major disruption to take place, the bus itself must be
broken somewhere. Bus networks are easy to expand. Additional nodes can be added
anywhere along the bus.
There are several limitations to the bus network topology. The length of the bus is limited
by cable loss. A bus network may not work well if the nodes are located at scattered points
that do not lie near a common line. In situations like this, a ring network, mesh network, or
star network may prove more flexible and more cost effective.
4.4.2 Star:
A star network is a local area network (LAN) in which all nodes (workstations or other
devices) are directly connected to a common central computer. Every workstation is
32

indirectly connected to every other through the central computer. In some star networks,
the central computer can also operate as a workstation.
The illustration shows a star network with five workstations (or six, if the central computer
acts as a workstation). Each workstation is shown as a sphere, the central computer is
shown as a larger sphere, and connections are shown as straight lines. The connections can
be wired or wireless links.
Figure 10
The star network topology works well when workstations are at scattered points. It is easy
to add or remove workstations.
If the workstations are reasonably close to the vertices of a convex polygon and the system
requirements are modest, the ring network topology may serve the intended purpose at
lower cost than the star network topology. If the workstations lie nearly along a straight
line, the bus network topology may be best.
In a star network, a cable failure will isolate the workstation that it links to the central
computer, but only that workstation will be isolated. All the other workstations will
continue to function normally, except that they will not be able to communicate with the
isolated workstation. If any workstation goes down, none of the other workstations will be
affected. But if the central computer goes down, the entire network will suffer degraded
33

performance or complete failure. If redundancy is required, the mesh network topology
may be preferable
4.4.3 Ring:
A ring network is a local area network (LAN) in which the nodes (workstations or other
devices) are connected in a closed loop configuration. Adjacent pairs of nodes are directly
connected. Other pairs of nodes are indirectly connected, the data passing through one or
more intermediate nodes.
The illustration shows a ring network with five nodes. Each node is shown as a sphere, and
connections are shown as straight lines. The connections can consist of wired or wireless
links.
Figure 11
The ring topology may prove optimum when system requirements are modest and
workstations are at scattered points. If the workstations are reasonably close to the vertices
of a convex polygon (such as the pentagon shown in the illustration), the cost can be lower
than that of any other topology when cable routes are chosen to minimize the total length
of cable needed.
A break in the cable of a ring network may result in degraded data speed between pairs of
workstations for which the data path is increased as a result of the break. If two breaks
34

occur and they are not both in the same section of cable, some workstations will be cut off
from some of the others. When system reliability is a critical concern, a bus network or star
network may prove superior to a ring network. If redundancy is required, the mesh
network topology may be preferable.
4.4.4 Mesh:
A mesh network is a local area network (LAN) that employs one of two connection
arrangements, full mesh topology or partial mesh topology. In the full mesh topology, each
node (workstation or other device) is connected directly to each of the others. In the partial
mesh topology, some nodes are connected to all the others, but some of the nodes are
connected only to those other nodes with which they exchange the most data.
The illustration shows a full mesh network with five nodes. Each node is shown as a
sphere, and connections are shown as straight lines. The connections can be wired or
wireless.
Figure 12
A mesh network is reliable and offers redundancy. If one node can no longer operate, all
the rest can still communicate with each other, directly or through one or more
35

intermediate nodes. Mesh networks work well when the nodes are located at scattered
points that do not lie near a common line.
The chief drawback of the mesh topology is expense, because of the large number of
cables and connections required. In some scenarios, a ring network or star network may
prove more cost effective than a mesh network. If all the nodes lie near a common line, the
bus network topology is often the best alternative in terms of cost.
5. Navigation
Navigation is the process of reading, and controlling the movement of a craft or vehicle
from one place to another.[1] It is also the term of art used for the specialized knowledge
used by navigators to perform navigation tasks. The word navigate is derived from the
Latin "navigate", which is the command "sail". Radio Navigation is based on the use of
Radio Transmitter, Radio Receiver and propagation of electromagnetic waves to find
navigational parameter such as direction, distance, position of the aircraft etc. According to
service range the radio navigational aids are broadly classified into three categories -
1. Long Range.
2. Medium Range.
3. Short range.
1.Long Range navigational aids
Operate in very low frequency and low frequency, i.e. 10KHz, 50-100KHz and
100-200KHz respectively.
36

Provide very long ranges of the order of 7000Kms and 700Kms.
They are based on the hyperbolic system of navigation.
LORAN and OMEGA falls in this category.
2.Medium range navigational aids
It operates in the LF or MF band of frequency .
It gives the range of 150-250 nautical miles.
NDB (Non Directional Beacons) falls in this category.
3.Short-range navigational aids
These aids operate in and above VHF bands.
The coverage is dependant upon line of sight propagation.
VHF, ILS, DME, VOR and RADAR are some widely used short-range aids.
5.1 Navigational Aids
5.1.1 ILS
37

An instrument landing system (ILS) is a ground-based instrument approach system that
provides precision guidance to an aircraft approaching and landing on a runway, using a
combination of radio signals and, in many cases, high-intensity lighting arrays to enable a
safe landing during instrument meteorological conditions (IMC), such as low ceilings or
reduced visibility due to fog, rain, or blowing snow.
Instrument approach procedure charts (or approach plates) are published for each ILS
approach, providing pilots with the needed information to fly an ILS approach during
instrument flight rules (IFR) operations, including the radio frequencies used by the ILS
components or navaids and the minimum visibility requirements prescribed for the specific
approach.
Radio-navigation aids must keep a certain degree of accuracy (set by international
standards of CAST/ICAO); to assure this is the case, flight inspection organizations
periodically check critical parameters with properly equipped aircraft to calibrate and
certify ILS precision.
Principle of operation
An ILS consists of two independent sub-systems, one providing lateral guidance
(localizer), the other vertical guidance (glide slope or glide path) to aircraft approaching a
runway. Aircraft guidance is provided by the ILS receivers in the aircraft by performing a
modulation depth comparison.
38

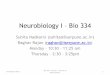
Figure 13 (The emission patterns of the localizer and glideslope signals. Note that the
glide slope beams are partly formed by the reflection of the glideslope aerial in the ground
plane.)
A localizer (LOC, or LLZ until ICAO designated LOC as the official acronym [1]) antenna
array is normally located beyond the departure end of the runway and generally consists of
several pairs of directional antennas. Two signals are transmitted on one out of 40 ILS
channels between the carrier frequency range 108.10 MHz and 111.95 MHz (with the
100 kHz digit always odd, so 108.10, 108.15, 108.30, and so on are LOC frequencies but
108.20, 108.25, 108.40, and so on are not). One is modulated at 90 Hz, the other at 150 Hz
and these are transmitted from separate but co-located antennas. Each antenna transmits a
narrow beam, one slightly to the left of the runway centerline, the other to the right.
The localizer receiver on the aircraft measures the difference in the depth of modulation
(DDM) of the 90 Hz and 150 Hz signals. For the localizer, the depth of modulation for
39

each of the modulating frequencies is 20 percent. The difference between the two signals
varies depending on the position of the approaching aircraft from the centerline.
If there is a predominance of either 90 Hz or 150 Hz modulation, the aircraft is off the
centerline. In the cockpit, the needle on the horizontal situation indicator (HSI, the
instrument part of the ILS), or course deviation indicator (CDI), will show that the aircraft
needs to fly left or right to correct the error to fly down the center of the runway. If the
DDM is zero, the aircraft is on the centerline of the localizer coinciding with the physical
runway centerline.
A glide slope (GS) or glide path (GP) antenna array is sited to one side of the runway
touchdown zone. The GP signal is transmitted on a carrier frequency between 329.15 and
335 MHz using a technique similar to that of the localizer. The centerline of the glide slope
signal is arranged to define a glide slope of approximately 3° above horizontal (ground
level). The beam is 1.4° deep; 0.7° below the glideslope centerline and 0.7° above the
glideslope centerline.
These signals are displayed on an indicator in the instrument panel. This instrument is
generally called the omni-bearing indicator or nav indicator. The pilot controls the aircraft
so that the indications on the instrument (i.e., the course deviation indicator) remain
centered on the display. This ensures the aircraft is following the ILS centreline (i.e., it
provides lateral guidance). Vertical guidance, shown on the instrument by the glideslope
indicator, aids the pilot in reaching the runway at the proper touchdown point. Most
aircraft possess the ability to route signals into the autopilot, allowing the approach to be
flown automatically by the autopilot.
40

Components of ILS are as : –
1. Localizer
A localizer is one component of an Instrument Landing System (ILS). The localizer
provides runway centerline guidance to aircraft. In some cases a localizer is at an angle to
the runway usually due to obstructions around the airport. It is then called a Localizer
Type Directional Aid. Localizers also exist in stand-alone instrument approach
installations and are not always part of an ILS. The Localizer is placed about 1,000 feet on
the far end of the approached runway. Its useful volume extends to 18 NM for the path up
to 10 degrees either side of the course. For an angle of 35 degrees either side of the course
the useful volume of the Localizer extends up to 10 NM. Horizontal guidance gets more
accurate the closer you fly to the Localizer station. Localizer approaches have their specific
weather minimums found on approach plates. Localizer uses the frequency range 108-
112MHz. It’s frequency at Jaipur Airport is 109.9MHz.
2. Glide Path
The function of the Glide Path unit is to provide, within its coverage limits, an inclined
plane aligned with the glide path of the runway for providing elevation guidance to landing
aircraft. The Glide Path gives the information indicating the aircraft’s position relative to
the required angle of descent. The MARRY antenna is used for it. Frequency range for
41

Glide path is 328-336MHz. It’s frequency at Jaipur Airport is 333.8MHz. Covering range
for Glide Path is 10NM. The Glide Path unit is made up of a building, the transmitter
equipment, the radiating antennas and monitor antennas mounted on towers. The antennas
and the building are located about 300 feet to one side of the runway center line at a
distance of about 1,000 feet from the approach end of the runway.
3. Inner Marker
A marker basically gives the distance from the runway, to the aircraft. It is about 1000 feet
from the runway threshold. At inner marker the aircraft should be about 50 feet above from
the runway centerline.
4. Middle Marker
It is about 3500 feet from the runway threshold. At middle marker the aircraft should be
about 225 feet above from the runway centerline.
5. Outer Marker
It is about 7000 feet from the runway threshold. At outer marker the aircraft should be
about 2700 feet above from the runway centerline.
42

Figure 14 (ILS)
5.1.2 DME
Basics
Distance measuring equipment (DME) provides pilots with a slant range measurement of
distance to the runway in nautical miles. DMEs are augmenting or replacing markers in
many installations. The DME provides more accurate and continuous monitoring of correct
progress on the ILS glideslope to the pilot, and does not require an installation outside the
airport boundary. When used in conjunction with an ILS, the DME is often sited midway
between the reciprocal runway thresholds with the internal delay modified so that one unit
43

can provide distance information to either runway threshold. On approaches where a DME
is specified in lieu of marker beacons, the aircraft must have at least one operating DME
unit to begin the approach, and a DME Required restriction will be noted on the Instrument
Approach Procedure.
Operation
The operating principle of DME system is based on the RADAR principle means the time
required for a radio pulse signal to travel to a given point and return. DME is Secondary
RADAR with the location of the Transponder and Interrogator reversed.
The airborne transmitter repeatedly initiates a process of sending out very short, very
widely spaced interrogation pulses. These are picked up by the ground transponder
receiver whose output triggers the associated transmitter into sending out reply pulses on a
different channel. The airborne receiver receives these replies. Timing circuit automatically
measures the round-trip travel time, or interval between interrogation and reply pulses, and
converts this time into electrical signal, which operate the distance indicator.
Distance calculation- A radio pulse takes around 12.36 microseconds to travel one nautical
mile to and from, this is also referred to as a RADAR-Mile. The time difference between
interrogation and reply minus the 50 microsecond ground transponder delay is measured
by the interrogator's timing circuitry and translated into a distance measurement in nautical
miles which is then displayed in the cockpit.
44

DME frequency range -
Allotted: 960MHz to 1215MHz.
Critically used: 962 MHz to 1213MHz.
The band is divided into 126 channels for interrogation and 126 channels for transponder
replies. The interrogation and reply frequencies always differ by 63 MHz. An airplane’s
DME interrogator uses frequencies from 1025 to 1150 MHz.
The variation in time spacing of the pulse pairs of the aircraft interrogation is termed as
Pulse Jittering. Thus the variation in time spacing of the pulse pair is unique to each
aircraft, and permits the aircraft to select the replies to its particular interrogations.
5.1.3 DVOR
The Doppler Very high frequency Omni Range is a ground based, radio aircraft navigation
aid, transmitting an omni-directional signal that enables an to determine its bearing relative
to the location of the beacon.
Basics
It works on the principle of phase comparison of two 30 Hz signals.
Frequency range for DVOR is 112-118MHz.
Range of covering is 200NM (for medium range aid)
45

Antenna
Antenna used for DVOR is called “modified Alford slot antenna”. An antenna system,
comprising a ring of 48 sideband antennas and a central carrier antenna, mounted on a
suitable ground plane. The counter poise is uses as a ground plain. It works as a perfect
conductor.Diameter is set at a distance of 44.0 feet or13.4 meter. This arrangement
produces peak frequency deviation. DVOR is phase sensitive equipment thus it uses the
Horizontal Polarization, as to minimize the effect of noise.
Operation
Amplitude Modulating the carrier frequency signal by a 30Hz-modulating signal produces
the DVOR reference signal. The modulating carrier is radiated from the central omni-
directional antenna. The phase of 30Hz AM is therefore constant irrespective of direction,
hence termed 30Hz reference.
The DVOR variable signal is produced by the space modulation of carrier signal by the
amplitude of the frequency modulated sideband signals. The sideband signals (fc+9960Hz)
and (fc-9960Hz) are radiated diametrically in a ring of antennas and are commutated
around the ring at a 30Hz rate.
The distant observer therefore, sees a Doppler frequency shift of these sideband
frequencies varying at 30 Hz with a maximum deviation determined by the diameter of the
ring. The Doppler VOR beacons also transmit VOICE and CODE identification
information to the aircraft. This information amplitude modulates the RF carrier and is
radiated omni –directionally from the central antenna, along with the 30 Hz AM reference
signal.In the aircraft receiver the complex VHF signal is first envelope detected to obtain
46

the 30 Hz AM signal and the 9960 Hz sub carrier. The sub carrier contains the variable
signal. This signal is fed to two sets of filters to separate the 30Hz and 9960Hz sub carrier.
One of the filter produces a 30Hz output the Reference signal whereas the other produces
the 30Hz Variable signal. The 9960 Hz sub carrier is FM demodulated to obtain the FM
variable signal. The relative phase difference between the two 30 Hz is then measured. The
bearing information is converted into a visual indication for the pilot.
47

6. References
Training material provided by the Airports Authority Of India
www.aai.aero
Electronic Communication System by Kennedy & Davis.
http://en.wikipedia.org/wiki/Instrument_landing_system
48