Embed Size (px)
Citation preview

1Tcvpscfiwn(saccost
pogevsftta
p
1414 J. Opt. Soc. Am. A/Vol. 26, No. 6 /June 2009 K. A. Jameson and N. L. Komarova
Evolutionary models of color categorization.I. Population categorization systems
based on normal and dichromat observers
Kimberly A. Jameson1,3 and Natalia L. Komarova2,4
1Institute for Mathematical Behavioral Sciences, University of California,Irvine, Social Science Plaza, Irvine, California 92697-5100, USA
2Department of Mathematics, University of California, Irvine, Rowland Hall, Irvine, California 92697-3975, [email protected]
Received August 29, 2008; revised March 5, 2009; accepted March 6, 2009;posted April 16, 2009 (Doc. ID 100703); published May 22, 2009
The evolution of color categorization is investigated using artificial agent population categorization games, bymodeling observer types using Farnsworth–Munsell 100 Hue Test performance to capture human processingconstraints on color categorization. Homogeneous populations of both normal and dichromat agents are sepa-rately examined. Both types of populations produce near-optimal categorization solutions. While normal ob-servers produce categorization solutions that show rotational invariance, dichromats’ solutions showsymmetry-breaking features. In particular, it is found that dichromats’ local confusion regions tend to repelcolor category boundaries and that global confusion pairs attract category boundaries. The trade-off betweenthese two mechanisms gives rise to population categorization solutions where color boundaries are anchored toa subset of locations in the stimulus space. A companion paper extends these studies to more realistic, hetero-geneous agent populations [J. Opt. Soc. Am. A 26, 1424–1436 (2009)]. © 2009 Optical Society of America
OCIS codes: 330.1690, 330.5020, 330.4060.
gfptfagwvoscalttvc
vscasefne
bc
. INTRODUCTIONhe empirical literature on human color perception andategorization suggests that there is a good deal of uni-ersality in color categorization across different groups ofeople, although a considerable amount of variation is ob-erved across individual categorizers and ethnolinguisticategorization systems [1]. A long-standing debate in theeld is whether specific universal tendencies exist in theays different human linguistic societies categorize andame perceptual color experiences and if so, what factorse.g., physical environment, human biology, perception,ocial features) cause them. A major challenge for therea continues to be development of a theory that ac-ounts for universal patterns seen across various colorategorization systems while simultaneously explainingbserved differences. This color categorization, color vi-ion, and perceptual processing problem has recently at-racted the interest of computational scientists [2–8].
A related issue is whether any consequences for humanopulation categorization systems follow from individualbserver color perception differences, which vary by de-ree and frequency, across populations. It is possible thatven considerable amounts of within-population indi-idual variation do not substantially affect categorizationolutions across different populations. Alternatively, dif-erences in individual color perception across two popula-ions might very easily produce substantive differences inhe categorization systems that the populations evolvend end up using to classify color in everyday discourse.While a large amount of empirical research compares
opulation categorization data across different language
1084-7529/09/061414-10/$15.00 © 2
roups (e.g., [9]), very little systematic investigation hasocused on the impact of individual differences withinopulations on those populations’ color categorization sys-ems ([10–12] consider some influences of individual dif-erences). In particular, population variation scenariosnd their outcomes have not been systematically investi-ated in light of either (i) empirically observed variationithin and across human groups, or (ii) simulations thatary agent-based models of categorization. For the meth-dology of population categorization simulations, real pos-ibilities exist for investigating many features havingounterparts in human color category evolution. For ex-mple, it provides a means to observe, in silico, the evo-utionary dynamics of developing categorization systems,o study system robustness and factors influencing sys-em stabilization, and to evaluate structural similarity orariation in stable solutions that occur under differentonstraints.
The present paper explores the impact of varying indi-idual visual processing constraints on the evolution ofhared color category systems. One goal is to systemati-ally examine the ways color category solutions change asfunction of varying perceptual processing features of ob-
erver populations. In particular, we focus on the influ-nces from forms of color discrimination deficienciesound in real observers. Another goal is to identify mecha-isms contributing to color category development and cat-gory solution variation.
The modeling framework used here employs agent-ased evolutionary game theory methods to model humanolor categorization systems [6,8]. While our earlier re-
009 Optical Society of America

sdwtcp“uwrtvp
oauias
2PEtrllmgets(a
ASSnTjcds(rsocapM
dolostczc
BIofsl
p
Fse
K. A. Jameson and N. L. Komarova Vol. 26, No. 6 /June 2009/J. Opt. Soc. Am. A 1415
earch considered idealized populations of agents withifferent color perception abilities, in the present papere investigate the effect of more realistic observer varia-
ion. We aim to gain understanding of the variation inolor categorization systems found across homogeneousopulations (i.e., populations of simulated observers, oragents,” that all possess the same discrimination model)nder different realistic observer models. This contrastsith our companion paper, which examines color catego-
ization for heterogeneous populations ([13] this issue). Inhe present paper we examine two types of observerariations: (1) normal color perception variations and (2)rotanope and deuteranope dichromat variations.We begin below by describing the stimulus continuum
n which all our agent models are based, and detail thegent models used. Then we report investigations thatse realistic models of several individual observer types,
ncorporated into homogeneous population simulations,nd present the results. The last section of the articleummarizes the findings of the research.
. MODELING ARTIFICIAL OBSERVEROPULATIONSvolutionary game theory methods are used to examine
he effects of specific realistic constraints on color catego-ization and inter-individual communication. These fol-ow a modeling framework in which individual agentsearn to (1) categorize simulated colors through reinforce-
ent learning by playing “discrimination–similarityames” and (2) communicate the meaning of categories toach other [6,8]. Three main components of this evolu-ionary approach are (A) the stimulus space, (B) the ob-erver model, and (C) the evolutionary game. ComponentC) is detailed in recent research [6,8]. Components (A)nd (B) are described below.
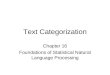
ig. 1. FM100 stimulus with data used to model protanope (lefion axes: red=protan, green=deutan. (Blue=tritan; not modelrrors.
. The Farnsworth–Munsell 100 Hue Test as a Stimuluspaceimilar to earlier research [6,8], a hue circle is used as aatural perceptual subspace of the color appearance solid.he hue circle has the following characteristics: it is (i) a
ustified subspace according to models of human color per-eption [[14], p. 184], (ii) it has value as a structure foristinguishing normal observers from color-deficient ob-ervers based on hue circle similarity relations (e.g., [15]),iii) as a color perception subspace it preserves similarityelations among hue categories regardless of variation inalient hue points across normal individuals, and (iv) usef the hue circle capitalizes on a wealth of existing humanolor perception data for the purpose of modeling artificialgent observer groups. The hue circle stimulus model em-loyed in the present investigations is the Farnsworth–unsell 100 hue test, abbreviated FM100 [16].The FM100 stimulus is a continuous hue circle series,
iscretized into 85 color “caps” forming a smooth gradientf hue, ostensibly at a fixed level of brightness and a fixedevel of saturation [17]. Figure 1 shows an approximationf the 85-cap hue gradient. Our use of the FM100’s 85timuli as a hue circle continuum extends the compara-ively restricted hue continua investigated in our earlierolor category studies and permits more direct generali-ations and comparisons with available human color per-eption data (i.e., [18,19]).
. Realistic Models of Observer Variationn this paper we model normal and dichromat agents, andnly a subspace of full color space is considered. There-ore, our observer models reflect only the appropriate sub-et of human color discrimination behaviors. Neverthe-ess, their investigation is very informative.
Models used to define our agents consider only colorerception deficiencies linked to human X-chromosome
deuteranope (right) agents. Colored lines show deficiency confu-e). Deviations from the inner circle illustrate observer sorting
t) anded her

rTfpmmacsbpf8ai
csncmsheztcmp
CWuetsta
mdaaatttttwtT
daassre
1Acpmttrofint
carFho
2LcFtstwtmslatfFv
he(1ar
wfi=t
1416 J. Opt. Soc. Am. A/Vol. 26, No. 6 /June 2009 K. A. Jameson and N. L. Komarova
ecessive inheritance (i.e., protan and deutan variations).he biological bases and perceptual consequences of these
orms of human deficiency are well understood [20]. Inrotan defects the long-wavelength-sensitive photopig-ent is missing or abnormal. In deutan defects theiddle-wavelength-sensitive photopigment is missing or
bnormal. Protan and deutan degrees of color confusionan be summarized as confusions among colors within theets of (1) green-yellows, yellows, and yellow-reds; (2)rowns and greens; (3) blue-greens and violets; and (4)urples, grays, and greens [20]. Such deficiencies occur,or example, among males of European descent at about% frequency [20], but incidence of deficiency variescross populations of different ancestry and follow knownnheritance patterns [21–24].
Important features distinguish color perception andategorization dynamics in human populations from thecenarios simulated here. Here we minimize learned cog-itive factors that contribute to human colorategorization—e.g., factors involving individual coloremory, social utility attached to specific colors, or per-
onal color salience. Omitting complex cognitive factorsere permits a focus on specifically clarifying the influ-nces of color perception and discrimination on categori-ation. In addition, unlike our recent investigations [6,8],he present study does not examine differing saliences inolor space that are linked to either variation in environ-ental color distribution, or variation in the putative im-
ortance or utility, of color (cf. [11]).
. Modeling Different Forms of Observer Variatione simulate both normal and deficient observer groups
sing human data. “Normal” agents include those mod-led on normal trichromat FM100 performance data, withrichromacy confirmed by pseudoisochromatic plate as-essment [25]. “Deficient” agents are modeled using pro-anope and deuteranope performances from an FM100 di-gnostic database [26].To accurately model data from normal and deficient hu-an individuals, a probabilistic observer model is intro-
uced. Suppose the hue circle to be categorized by allgents is identical (i.e., the FM100 stimulus). Two colorsre chosen randomly from the circle and presented to thegent. The agent must judge whether the two colors arehe same or different. An appropriate color confusionransformation can be defined to give the probabilitieshat an agent perceives the two chosen color stimuli ashe same or different in color. In general the transforma-ion is described as a stochastic n�n matrix (a matrixhose rows sum up to one), �Cij�, whose entries Cij give
he probability that stimulus i is perceived as stimulus j.his confusion matrix varies across individual agents.In modeling our agents, several types of
iscrimination-based confusions among FM100 stimulire defined. One is a form of unsystematic noise in angent’s categorization that resembles the sorting confu-ion errors seen when human observers sort the FM100timulus continuum. Two additional kinds of confusions—eferred to as local and global confusions—are also mod-led. All forms of confusions are defined below.
. Sorting Confusionshuman observer may have perfectly normal color per-
eption and be expected to show error-free FM100 sortingerformance; however, typically, individual sorting perfor-ance shows random transposition errors, or confusions,
hat occur between adjacent stimuli. Normal confusionsend to be 2-cap exchange errors that are random, seldomeoccur on retest, and are not bunched in any one regionf the hue circle [27]. Such normal, unbiased sorting con-usions are modeled here by assuming that with probabil-ty p, each color cap can be confused with either of itseighboring caps on the FM100 stimulus. This leads tohe following matrix:
Cijsorting = �
1 − p, i = j
p/2, j = i ± 1
0, otherwise� . �1�
FM100 sorting confusion errors [Eq. (1)] are the onlyonfusions modeled and varied in our normal trichromatgents. (Other trichromats, e.g., anomalous trichromats,equire additional modeling features to approximate theirM100 performance [13]). Dichromat agent models usedere require the parameterization of two additional formsf FM100 confusion, described below.
. Local Confusionsocal confusions are cap transpositions beyond sortingonfusions. They define sizable segments of neighboringM100 stimuli (mostly within, but also spanning, FM100
rays). Local confusions for deficient observers cluster in-ide local confusion regions, or portions of the FM100 con-inuum where several adjacent stimuli may be confusedith one another (see [20,27]), where dichromats may
ranspose the stimulus order by as much as ten steps orore on the circle. While transpositions in the sequential
timulus order can appear anywhere in an FM100 tray, ifocal mis-sorting occurs at the end of a given tray there is
tendency for transpositions to continue in the FM100ray adjacent to the mis-sorted segment. Thus, local con-usion regions, as defined here, can span two trays of theM100, and where they occur typically depends on the se-erity and type of observer deficiency found in the data.
To model local confusions, it is assumed that there areue circle regions where the probability of confusion is el-vated compared with the incidence of sorting confusionssee, e.g., Fig. 1). Local confusion regions arising from Fig.
types of deficiency always present as pairs of regionscross the FM100 circle. Let us denote two such confusionegions as I1 and I2. Then
Cijlocal = �exp�−
�j − i�2
w �Wi−1, i,j � I1 or i,j � I2
1, i = j � I1,2
0, otherwise� , �2�
here w gives the width of the characteristic range of con-usion within local confusion regions and W is the normal-zation factor for the given confusion region: Wij�I1,2
exp�−�j− i�2 /w�, where the summation is over allhe caps inside the confusion region of cap i.

3GcsfcgpcipcpbFsmiwcfwdaf
st
DBoet
doeicwkl
1Tlmiemtrvgmptisi
2FoggmcrCa
3Fs=n=
4Tr
F[cl
S e
s
s–(3)
K. A. Jameson and N. L. Komarova Vol. 26, No. 6 /June 2009/J. Opt. Soc. Am. A 1417
. Global Confusionslobal confusions seen in dichromats are color stimuli
onfused across the hue circle [[20] pp. 65–69], typicallyhown as FM100 stimuli pairs connected by a line of con-usion [28]. We previously referred to this as an “axis ofonfusion” [8]. Development of dichromat agent modelsave consideration to whether typical FM100 confusionair axes (e.g., Fig. 2) realistically capture the day-to-dayonfusions of dichromats, given that some visual process-ng circumstances help disambiguate global confusionairs and make global confusions less likely in everydayolor judgments. Our models adopt Fig. 2’s [28] confusionairs because (a) occupational evidence suggests that glo-al confusions do arise in everyday practice and (b)M100 confusion pair axes are consistent with confusionseen in dichromat judged-similarity color-triad perfor-ance [15]. Thus, dichromat global confusion pairs exist
n practice when similarity is important, as is the caseith the FM100 task. Based on Fig. 2, dichromat global
onfusions are modeled as three pairs of opposing capsrom the FM100 hue circle. Let us denote them xk and x̄kith k� �1,2,3�. It is convenient to introduce a function gefined on the set Xgl�x1 , x̄1 , . . . , x̄3� such that g�xk�= x̄knd g�x̄k�=xk. The global confusion matrix is given by theormula
Cijglobal = �
0.5, i � Xgl and j = i
0.5, i � Xgl and j = g�i�
1, i = j � Xgl
0, otherwise� . �3�
Accordingly, protanope and deuteranope global confu-ion matrices are separately modeled based on the respec-ive confusion lines shown in Fig. 2.
. Parameter Estimation Based on Data Analysisased on these forms of confusion identified across vari-us types of observers [Eqs. (1)–(3)], simulation param-ter settings were derived for different agent types usinghe relevant human data. Thus, the appropriate FM100
ig. 2. Dain’s depiction of FM100 stimuli in CIE (1976) space28] (reproduced with permission). Inset lines show three globalonfusion pairs used for protan (solid lines) and deutan (dottedines) agents modeled.
ata determine the parameter settings for various formsf “normal trichromat” and “dichromat” agents. Param-ter values varying across agent types include p, probabil-ty of sorting confusions [Eq. (1)]; I� with �� �1,2�, localonfusion regions [Eq. (2)]; w, a confusion range valueithin local confusion regions [Eq. (2)]; and xk and x̄k with� �1,2,3�, global confusion pairs [Eq. (3)]. Further simu-
ation parameterization details are given in Table 1.
. Sorting Errorshe probability of sorting errors, p, is calculated as fol-
ows. For normal individuals the FM100 data of ten nor-al trichromat individuals were used to calculate each
ndividual’s total number of cap inversions. [29]. The av-rage number of observed inversions across the ten nor-al individuals equaled 6.8 inversions. Thus, based on
hese data, on average a normal individual makes 6.8andomly distributed sorting errors per 85 caps (1.7 in-ersions per tray). The probability of inversion per cap isiven by 6.8/85=0.08, that is, 8%. This value was used toodel the unbiased sorting error for normal individual
erformance across the 85 stimuli of the FM 100. Consis-ent with dichromat characteristic performance, 8% sort-ng error was also used to model dichromat sorting confu-ion rates outside local confusion regions andndependent of global confusion pairs [30].
. Local Confusion Regionsor dichromat agents, local confusion regions were basedn Fig. 1 results, where protanopes have two confusion re-ions, I1= �12,27� and I2= �59,70�, and deuteranopes re-ions are I1= �9,25� and caps I2= �51,63�, [31]. A dichro-at confusion range width parameter w, for estimating
ap sequence inversions that occur inside local confusionegions was defined as w=10, also based on Fig. 1 data.onsistent with human observer data, models for normalgents do not include local confusion regions.
. Global Confusion Pairsigure 2 data provide values for dichromat global confu-ion pairs. Protanope global confusion pairs are caps: x19 & x̄1=29, x2=1 & x̄2=40, and x3=74 & x̄3=53. Deutera-opes also have three global confusion pairs: x1=11 & x̄121, x2=2 & x̄2=31, and x3=79 & x̄3=42.
. Summary of the Resulting Agent Modelshe following agent confusion definitions were incorpo-ated in our model:
Table 1. Simulation Notation
ymbol Definition Valu
N Total number of agents 100n Total number of hue circle stimuli (FM100
samples)85
ksim Parameter defining the pragmatic utility ofcolors
11
w Confusion range operating in a local confusionregion
varie
p Probability of sorting confusion varieCij Probability that stimulus i is confused with j Eqs. (1)

w
ctbfnG(n
tdsddcmrombi
3IStapc[bsdv
APscttae
aAneiacpmict
tim
ahtocatilsnwftrnhulc
BSSpwdampald
1Pwwetmecs
cmFmdtetttp
1418 J. Opt. Soc. Am. A/Vol. 26, No. 6 /June 2009 K. A. Jameson and N. L. Komarova
Normal agents �C=Csorting�: Probability of confusionith a neighboring cap is p=8%.Dichromats �C=CsortingClocalCglobal�: (i) Probability of
onfusion with a neighboring cap, both inside and outsidehe confusion region, is p=8%. (ii) Local confusion regionsased on Fig. 1 data range from 12 to 27 and from 59 to 70or protanope agents and 9 to 25 and 51 to 63 for deutera-ope agents. Inside the confusion regions, w=10. And (iii)lobal confusion pairs based on Fig. 2 data: (9,29), (1,40),
74,53) for protanopes, (11,21), (2,31), (79,42) for deutera-opes.Parameter values that differ from Table 1 are noted in
he text. To the degree that the data used in our modelingiffer from other observer data in the literature, our ob-erver models would vary accordingly if based on differentata. During model development we varied the data un-erlying the parameterization to evaluate the effect onategorization solutions. Such tests found that alteringodel features such as the positions of local confusion
anges and global confusion pairs, or varying the valuesf sorting confusion rates, did not fundamentally alter theain findings presented here or diminish the symmetry-
reaking results or category-solution trade-offs reportedn Studies 1 and 2 below.
. POPULATION HUE CATEGORIZATIONNVESTIGATIONStudy 1 and Study 2 consider homogeneous populationso (i) investigate population categorization influencesrising from different forms of individual variation withinopulations and (ii) to provide a foundation for plannedomparisons between heterogeneous populations (i.e., in13]). Population homogeneity is intentionally unrealistic,ut is used in the present investigations to isolate thepecific influences that arise under the communicationynamics between individuals of particular observer colorision phenotypes.
. Communication Games Using FM100 Stimuliopulation color naming is achieved by discrimination–imilarity communication games involving the 85 FM100aps. Details of the discrimination–similarity communica-ion game, its variants, its relationship to other popula-ion naming evolutionary algorithms, and its rationale asn approach for understanding the evolution of color cat-gorization systems are reported elsewhere [6,8].
Briefly, the goal of the game is for a population ofgents to communicate successfully about color stimuli.t the beginning of the game, a large number of potentialames, with random meanings, are provided. Agentsvolve probabilistic naming strategies for the stimuli us-ng only these names. In a given round of the game, twogents are randomly chosen from the population and twoaps are randomly chosen, and named. Each agent’srobabilistic naming strategy is updated by its perfor-ance in the round. The basic idea of the updating is that
f agents successfully communicate about the colors of twoaps, or they agree on the caps’ names, then the probabili-ies that they will give the same names to those caps in
he future is increased (i.e., the agents are positively re-nforced) and appropriate decreasing adjustments are
ade to the other caps.To carry out successful communication in a game, it is
lso required that the two names meet the following co-erence requirement. The degree of similarity of two dis-inct caps is related to the inverse of the smallest numberf caps between them. If the degree of similarity of twoaps is large (i.e., they are neighboring caps on the circle)nd there is not an enormous number of names (as inhese simulations), then an evolutionarily effective nam-ng system will assign the two caps the same name. Simi-arly, names for caps with a small degree of similarityhould, in general, be different. The parameter ksim de-otes a pragmatic degree of similarity that determineshether two caps should be given the same name or dif-
erent names. Caps with fewer than ksim caps betweenhem should be given the same name, and those sepa-ated by more than ksim caps should be given differentames. The value of ksim can be made to vary across theue circle if some colors have more pragmatic or socialtility than others, and it has been shown to influence so-
utions from idealized populations [8]. Here ksim is heldonstant to emphasize effects from observer variation.
. Investigating Homogeneous Populationolutionstudy 1 examines several homogeneous populations (i.e.,opulations composed of uniformly modeled agents),here each population incorporates a slightly different in-ividual model. Two Study 1 homogeneous populationsre reported, namely, populations composed of 100% nor-al ideal agents and populations composed of 100%
robabilistic normal agents. By comparison, Study 2 ex-mines categorization solutions from homogeneous popu-ations of 100% protanopes compared with those of 100%euteranopes. The results are described below.
. Study 1: Homogeneous Normal Populationsopulations consisting only of identical normal observersith p=0 (no sorting errors) or realistic normal observersith p�0 (a nontrivial probability of sorting errors) [32]xhibit similar behaviors: starting from any initial condi-ion, after a number of game iterations, both sorts of ho-ogeneous populations converge to optimal, shared, cat-
gorization solutions, with all individual agentsonverging to very similar categorization solutions (i.e.,ynchronized up to small levels of random noise).
For Table 1 parameter values, such solutions typicallyonsist of four or five distinct color categories of approxi-ately equal size (shown in Fig. 3), as predicted in [6].igure 3 shows that for both ideal and probabilistic nor-al populations, five distinct categories were found. The
isagreement for each cap is calculated as a percentage ofhe population that categorizes the given cap to a cat-gory other than the most popular category. We can seehat percent disagreement in the ideal population solu-ion [Fig. 3(a), shown scaled by a factor of 10] is compara-ively less than the percent disagreement found in therobabilistic normal population solution [Fig. 3(b), un-

sbt
dtbopofi
csneattiearr
lltttbci
2Stsaeplswoffiahqscabdepapm
h
Flfehtl(ae
FlswRgsms1
K. A. Jameson and N. L. Komarova Vol. 26, No. 6 /June 2009/J. Opt. Soc. Am. A 1419
caled]. Figure 3(b) also illustrates the fuzzy categoryoundaries occurring in the probabilistic normal popula-ion solution.
The general finding is that increasing the values of poes not change the general structure of population solu-ions but increases the amount of uncertainty at categoryoundaries, making the degree of population agreementn color names near boundaries lower for higher values of. Aside from this new effect arising from the introductionf parameter p, Study 1’s normal population results con-rm earlier category solution findings [6].Solutions observed in Study 1 possess the following
haracteristic feature: repeated simulations with theame starting parameters produce categorizations withearly equally spaced boundaries and similar relative cat-gory structures, although category position locations canppear shifted by some random rotation from one simula-ion to another. Put differently, if a given simulation solu-ion partitioned the circular ordering of the FM100 capsnto, say, five clear category divisions, then those five cat-gories could be rotated to coincide with the categories ofnother simulation solution (run with all the same pa-ameters), and the two simulations could be viewed asandom rotations of each other. Thus, various forms of so-
ig. 3. (Color online) Color categorization and degree of popu-ation disagreement in homogeneous normal populations for dif-erent values of the sorting error, p. Panels show (a) no sortingrrors �p=0� and (b) sorting errors with probability p=0.08. Theorizontal axis is the 85 caps of the FM100. The dotted lines (andhe left vertical axis) show population-average categorization so-utions for a typical run (after 5�107 iterations). The solid linesand the right vertical axis) show the amount of population dis-greement; it is magnified by a factor of 10 in (a). Other param-ters are as in Table 1.
utions are all equally optimal solutions. The fact that so-utions are equivalent (or self-similar) with respect to ro-ations around the circle is a formal symmetry property ofhese solutions that has been observed here across mul-iple population simulations. This finding was predictedy earlier analytical results [6] and should be noted, be-ause equally interesting observations of symmetry break-ng are presented below.
. Study 2: Homogeneous Dichromat Populationsimulations were run on agent populations composed en-irely of 100% protanopes and 100% deuteranopes. De-pite the fact that the observer model underlying thesegents is very different from the normal model of Study 1,ach category solution from homogeneous dichromatopulations exhibited an overall category structure simi-ar to that of normal populations. The difference can beeen by running many evolutionary simulations startingith the same parameter values. Figures 4 (for protan-
pes) and 5 (for deuteranopes) present boundary locationrequencies observed across many such solutions. Bothgures’ histograms show distributions of solutions thatre strikingly nonuniform. Consider the leftmost bottomistogram in Fig. 4, which shows boundary location fre-uencies for all solutions from 1,000 random protanopeimulations. The boundaries occur most frequently ataps 8, 29, 52, and 74. A clear picture also emerges by ex-mining only four-category solutions shown in theottom-middle histogram in Fig. 4. Boundary locationsistributed across these solutions are almost identical toach other, mostly occurring at caps 8, 30, 52, and 74. Asredicted and similar to that observed elsewhere for ide-lized models of dichromats [8], the nontrivial psycho-hysical transformation characterizing realistic dichro-at data leads to a symmetry breaking.By comparison, Study 1’s similar boundary frequency
istograms from homogeneous normal population simula-
ig. 4. Boundary location histograms from 1,000 simulation so-utions by homogeneous protanope populations. Horizontal axeshow the FM100 85 caps. Vertical axis shows frequency withhich a color boundary was established at a given FM100 cap.esults are shown separately for all observed solutions (histo-rams at left), four-category solutions (middle), and five-categoryolutions (right). Top row, results under local confusion regions;iddle row, results under global confusion pairs; bottom row, re-
ults for both confusion features. Other parameters are in Tableand as described in Section 2.

tdrIsslh
fhitral
scppahcS7bsFr
lralt
smboa
icfaptmlaic(
[tas
iprtd“tcih(coc
wftpmtcfcdtgs
votaacuut(tw(ss
Fla
1420 J. Opt. Soc. Am. A/Vol. 26, No. 6 /June 2009 K. A. Jameson and N. L. Komarova
ions (not shown) appear as essentially uniform, unbiasedistributions without any clear maxima, except for slightandomness caused by the finiteness of our simulations.rregularity of boundary locations across many solutionsuggests that optimal category boundaries are not tied topecific stimulus locations for homogeneous normal popu-ations. In contrast, dichromat populations optimallyave color boundaries with preferred locations.While homogeneous populations of dichromats are not
ound in the real world, the present simulations involvingomogeneous populations of dichromat agents are very
nformative from a theoretical standpoint. In particular,hey help explain what features in the observer model areesponsible for symmetry breaking and how exactly localnd global confusions influence population color boundaryocations.
Local confusions. The top rows of Figs. 4 and 5 showimulation results using dichromat agent models that in-lude local confusion constraints only (no global confusionairs were included in the simulations). For these resultsrotanope (Fig. 4) and deuteranope (Fig. 5) boundariesre frequently located in well-defined segments along theue continuum, with few or no boundaries found betweenaps 11 and 27, or between caps 58 and 70 for protanopes.imilar results are depicted in the top rows of Figs. 6 and, where local confusion regions are marked by thicklack circular arcs and dashed double arrows define ob-erved color boundary locations (the results depicted inigs. 6 and 7 correspond to those in Figs. 4 and 5 results,espectively).
A general finding is that no boundaries occur inside anyocal confusion regions. For five-category solutions (top-ight graphics) the two most frequent solutions are drawns inscribed pentagons. Overall, results suggest that theocal confusion regions modeled from the data of Fig. 1end to repel color boundaries.
Global confusion pairs. The influence of global confu-ion pairs on categorization solutions is shown in theiddle rows of Figs. 4 and 5, where color boundaries are
iased to a small subset of stimuli. For example, protan-pe four-category solutions almost always have bound-ries at caps 8, 30, 52, 74 (Fig. 6, left column, middle row),
0 20 40 60 80
100200300
0 20 40 60 80
20406080
100120
0 20 40 60 80
50100150200250300
0 20 40 60 80
50100150200250
20 40 60 800
10203040
0 20 40 60 80
50100150200
0 20 40 60 80
100200300400500
0 20 40 60 80
50100150
0 20 40 60 80
50100150200250300350
4 category solutions 5 category solutionsAll solutionsO
nly
loca
lL
ocal
+G
loba
lO
nly
glob
al
8 256350
46 7079
25
7428 50 67
7146
863
25 50
5 4470 79
421079
31212
60
422 106321 85
7553
3142
7910
31212
60
258
63795044
25
2
46 6631
7944 50
825 63
ig. 5. Boundary location histograms from 1,000 simulation so-utions by homogeneous deuteranope populations. Figure layoutnd parameters are as in Fig. 4.
ndicating that the boundaries of the most frequent four-ategory solution align with four out of the six global con-usion pair caps (i.e., pairs marked by arrows connectedcross the circle). Five-category solutions are more com-licated because it is hard to find one nearly regular pen-agon with vertices at global confusion stimuli (Fig. 6,iddle row on left). In this case, the populations estab-
ished several solutions in which three out of five bound-ries aligned with global confusion stimuli. Similar find-ngs are seen for deuteranopes, which produce three mostommon four-category and five-category configurationsFig. 7).
These results (along with those from earlier research6,8]) show that global confusion pairs affect categoriza-ion by attracting boundaries through symmetry breakingnd providing necessary perceptual anchors (for some ob-ervers) in the categorization system of a population [33].
Technically speaking, the notion of color boundaries isll-defined in dichromat populations with global confusionairs. This is because in such populations, optimal catego-ization solutions are not exactly the same as in popula-ions of normals. That is, even though they do consist ofisjoint regions belonging to one category, there are alsodefects” near the location of global confusion pairs. Athese locations, two types of solutions are observed: (i) oneap is classified as having a different color category fromts neighbors, such as AAAABAAAA (here, cap number 5as category B and all its neighbors have category A) andii) one cap at the boundary between two categories islassified as a third category, such as AAAABCCCC (here,ne cap at the boundary between categories A and C islassified as B).
In Figs. 4 and 5, such defects (at most, six per solution)ere smoothed out: that is, B replaced A in type (i) de-
ects, and by either A or C in type (ii) defects. The exis-ence of these defects can be understood as follows: in theresence of global confusions the color space of dichro-ats has effectively a noncircular geometry, similar to
hat shown in our previous studies [8], where parts of theircle were collapsed onto each other. Note that manyorms of this collapse were investigated: a single point ofollapse across the hue circle, a full line, or any interme-iate collapse. All of these served to break symmetry inhe population solutions observed [8]. In the presence oflobal confusion pairs, then, the geometry of the optimalolution changes accordingly.
Local and global confusion trade-offs and parameterariation. Given the above observations, the combinationf these constraints clearly produces strong anchoringendencies for color boundaries at a subset of locationslong the circle, generally resulting in boundaries beingttracted by global confusion pairs and repelled by localonfusion regions. This is illustrated in Fig. 7, left col-mn. For example, when global confusion features aresed as constraints in the simulations (middle row), thehree preferred four-category solutions are optimized toi) approximately equi-partition the circle and (ii) havewo boundaries near global confusion points. However,hen both local and global confusion features are used
bottom row), the constraints on solutions become moretringent because local confusion features specifically re-trict color boundaries from forming inside a local confu-

sfgas
cnbcecga
adshlwrrc
csH=wbwrt
4Sdfsp
nvrgrl
Fhcfpcwctl
1
Fhatwra
K. A. Jameson and N. L. Komarova Vol. 26, No. 6 /June 2009/J. Opt. Soc. Am. A 1421
ion region (e.g., see top row, Fig. 7). Thus, whereas threeour-category solutions arise for simulations using onlylobal confusion features, only two four-category solutionsrise when both local and global features are used in theimulations.
Depending on the dichromat type and the number ofategories, local and global confusion features can alter-ate as the more restrictive influence on color categoryoundary formation. For example, for protanope four-ategory solutions, global confusions exert a greater influ-nce on boundary location (Fig. 4, middle column). Byomparision, for deuteranopes local confusions exert areater influence on their four-category solutions’ bound-ry locations (Fig. 5, middle column).The protanope and deuteranope agents in these studies
re characterized by parameter values estimated from in-ividual human data. However, the sample size of data ismall, which makes the error in parameter estimationigh. Therefore it is important to investigate how particu-
ar parameter choices affect the results. Experimentsere conducted using various positions of local confusion
egions with respect to global confusion pairs, and whileesulting boundary locations may change, the generalonclusions reported here remain robust.
ig. 6. Confusion parameter settings shown with results fromomogeneous protanope solutions (from Fig. 4). Top row, localonfusions; middle row, global confusions; bottom row, both con-usions. The circle depicts the FM100 caps. Caps 1, 21, 42, and 63rovide arbitrary points of reference. Thick black arcs with endaps show local confusion regions. Two-point thick black arrowsith confusion pair caps show global confusions. Typical four-
ategory (left), and five-category solutions (right) are shown. Inhe case of local confusions (top row), dashed double-arrowhead
Also, studies performed with different values of w (theonfusion width) and p, (the probability of sorting errors)how that the value of p has a minimal effect on solutions.owever, decreasing the value of w to low values (say, w1) alters solutions slightly. In particular, large values ofmake local confusion regions virtually impenetrable to
oundaries, whereas when w=1 there are some solutionshose boundaries are located inside the local confusion
egion. Those solutions are still quite infrequent, andhey disappear as w is increased to more realistic values.
. DISCUSSIONtudies 1 and 2 provide (i) categorization solutions underifferent homogeneous perceptual biases, and (ii) a meansor investigating mechanisms underlying previously ob-erved symmetry breaking effects [8], in populations com-osed entirely of realistic dichromat agent models.Study 1 examined populations consisting of identical
ormal observers with p=0 (no sorting errors) and severalariations of p�0 (nontrivial probability of sorting er-ors). Across several investigations p was varied, and theeneral consequence of increasing probabilistic sorting er-ors in the agent models was decreases in population so-ution agreement at color category boundaries. Aside from
Only local
85
8 33
25
51
76
Only global Only global
Only local1
63
1
21
42
63
2
31
11
79
1
63
9
25
51
1
21
42
63
2
31
11
79
21 21
42 42
4 categories 5 categories
Local + global Local + global1
21
42
63
9
25
51
2
31
11
79
21
42
63
9
25
51
2
31
11
79
9
25
43
51
63
ig. 7. Confusion parameter settings shown with results fromomogeneous deuteranope solutions (from Fig. 5). Figure layoutnd features are as in Fig. 6. Unlike the protanope model (Fig. 6),he deuteranope model has a local confusion region that coincidesith a global confusion pair (bottom row) and has local confusion
egions larger than those in the protanope data. Both differencesffect category boundary robustness.
ines mark regions where boundaries occur.

toitvneafasv[
mtcttao
rmcsBwfl
vtmpfifftarhsph[pdid
5O
osTdo
pe
ca
ia
efeofitse
tst
tpvtlbc
tt
s
ts
sml
tszpsr
ATsb0tne
1422 J. Opt. Soc. Am. A/Vol. 26, No. 6 /June 2009 K. A. Jameson and N. L. Komarova
his, increases of probabilistic sorting errors produced nother effects on category solutions. This result is interest-ng from the perspective of human color categorizationheory, because it suggests that varying precision in indi-idual category assignments during communication doesot hinder the formation of a shared population color cat-gorization system. Rather, varying of precision simplydds to the degree of classification uncertainty—oruzziness—observed at population color category bound-ries. Study 1’s findings for sorting error increases re-emble the null effects seen following random observerariation in other color category simulation research (see3], p. 517).
Study 2 investigated realistic approximations of dichro-at individual color perception variation to understand
he effect of different observer features on populationolor category evolution. Dichromat population simula-ions show that trade-offs were common among the fea-ures of various agent models. These features balanced indynamic fashion during the formation and stabilization
f near-optimal color categorization solutions.All the observed solutions of both Study 1 and Study 2
eached stabilization by maximizing successful color com-unications among agents. This was achieved in ways
ompatible with an optimal partitioning theory of colorpace that uses an Interpoint Distance heuristic [9,34,35].y varying the discrimination features modeled, insightsere gained concerning the mechanisms involved in the
ormation of category boundaries. These findings provideikely insights for human color categorization evolution.
Together, Studies 1 and 2 support the suggestion thatarying individual perceptual features influences popula-ion color categorization solutions. Results show that ho-ogeneous populations of simulated normal observers
roduce category solutions that differ in important waysrom those produced by homogeneous populations of real-stic dichromat agents. In addition, local and global con-usion analyses suggest a possible universal mechanismor the stabilization of population color categorization sys-ems. Similar color-naming solution dynamics were seencross populations even when the underlying populationesponse models had different perceptual biases. Finally,ere we examined situations involving agents made to re-emble a variety of real observers with fixed ksim, whereasrevious investigations examined populations with idealeterogeneous color observers with fixed and variable ksim8]. Despite these differences, a general result of theresent simulations and others [6,8], is that theiscrimination–similarity game evolves population nam-ng behavior that is near theoretically optimal. See [6] foretails about optimal naming behavior.
. SUMMARY OF FINDINGSur findings can be summarized as follows:
1. In homogeneous populations of realistic dichromatbservers, local and global confusions exert significantymmetry-breaking effects on categorization solutions.his contrasts with unsystematic error variations or ran-om sorting confusion variations, which have little impactn category solution stabilization.
2. Varying levels of normal-observer sorting confusionsrimarily decreases population agreement at color cat-gory boundaries.
3. Dichromat global confusion pairs break symmetry inategorization solutions by anchoring category bound-ries.4. Dichromat local confusion regions break symmetry
n categorization solutions by repelling category bound-ries.5. Realistic approximations of observer types confirm
arlier symmetry breaking and confusion axis findingsrom idealized populations [8]. Such modeling of color cat-gorization dynamics based on realistic data has not, tour knowledge, been previously attempted. The presentndings underscore the importance of tracking popula-ion heterogeneity when modeling shared color categoryystems or when empirically studying human color cat-gorization (see discussion in [36]).
6. Category solutions are shaped by the observer fea-ures employed, but solutions obtained under such con-traints are easily modified by introducing external fac-ors, such as variable color utility (see [8]).
By design, our previous investigations constrained bothhe realism of the individual observer models and theopulation models used [6,8]. By comparison, here indi-idual observer models were realistic while the popula-ions considered were unrealistically uniform. Despite theatter intended limitation, some universal tendencies cane suggested by the result for the present population colorategorization system evolution:
(i) Minimal impact of unsystematic perceptual varia-ion (e.g., random sorting error) on categorization solu-ions.
(ii) Substantial constraints imposed on solutions byystematic perceptual variation.
(iii) Countervailing mechanisms (arising from percep-ual variation) that trade off in the process of arriving attable categorization solutions.
(iv) Increases in trade-off demands as perceptual con-traints (e.g., color confusion pairs and regions) becomeore varied or more frequent in a population or engage
arger areas of color space.
It seems likely that some of the categorization solutionendencies observed here suggest mechanisms that mayimilarly underlie universal tendencies in color categori-ation systems of human populations. In a companion pa-er ([13], this issue) we pursue further testing of these is-ues using approximations of both realistic individual andealistic population models.
CKNOWLEDGMENTShe authors thank Louis Narens and Ragnar Steingrims-on for helpful suggestions. Partial support was providedy National Science Foundation (NSF) grant NSF7724228 from the Methodology, Measurement, and Sta-istics (MMS) Program of the Division of Social and Eco-omic Sciences (SES). N. Komarova gratefully acknowl-dges support of a Sloan Fellowship.

R
1
1
1
1
11
1
1
1
1
2
2
2
2
2
2
2
2
2
2
3
3
3
3
3
3
3
K. A. Jameson and N. L. Komarova Vol. 26, No. 6 /June 2009/J. Opt. Soc. Am. A 1423
EFERENCES AND NOTES1. P. Kay and T. Regier, “Resolving the question of color
naming universals,” Proc. Natl. Acad. Sci. U.S.A. 100,9085–9089 (2003).
2. T. Belpaeme and J. Bleys, “Explaining universal colorcategories through a constrained acquisition process,”Adapt. Behav. 13, 293–310 (2005).
3. L. Steels and T. Belpaeme, “Coordinating perceptuallygrounded categories: a case study for colour,” Behav. BrainSci. 28, 469–529 (2005).
4. L. D. Griffin, “The basic colour categories are optimal forclassification,” J. R. Soc., Interface 3, 71–85 (2006).
5. M. Dowman, “Explaining color term typology with anevolutionary model,” Cogn. Sci. 31, 99–132 (2007).
6. N. L. Komarova, K. A. Jameson, and L. Narens,“Evolutionary models of color categorization based ondiscrimination,” J. Math. Psychol. 51, 359–382 (2007).
7. A. Puglisi, A. Baronchelli, and V. Loreto, “Cultural route tothe emergence of linguistic categories,” Proc. Natl. Acad.Sci. U.S.A. 105, 7936–7940 (2008).
8. N. L. Komarova and K. A. Jameson, “Populationheterogeneity and color stimulus heterogeneity in agent-based color categorization,” J. Theor. Biol. 253, 680–700(2008).
9. T. Regier, P. Kay, and N. Khetarpal, “Color naming reflectsoptimal partitions of color space,” Proc. Natl. Acad. Sci.U.S.A. 104, 1436–1441 (2007).
0. M. A. Webster, S. M. Webster, S. Bharadwadj, R. Verma, J.Jaikumar, J. Madan, and E. Vaithilingam, “Variations innormal color vision. III. Unique hues in Indian and UnitedStates observers,” J. Opt. Soc. Am. A 19, 1951–1962 (2002).
1. M. A. Webster and P. Kay, “Individual and populationdifferences in focal colors,” in Anthropology of Color:Interdisciplinary Multilevel Modeling, R. E. MacLaury, G.V. Paramei, and D. Dedrick eds. (Benjamins, 2007), pp.29–53.
2. Delwin T. Lindsey and Angela M. Brown, “Universality ofcolor names,” Proc. Natl. Acad. Sci. U.S.A. 103,16608–16613 (2006).
3. K. A. Jameson and N. L. Komarova, “Evolutionary modelsof categorization. II. Investigations based on realisticobserver models and population heterogeneity,” J. Opt. Soc.Am. A 26, 1424–1436 (2009).
4. T. N. Cornsweet, Visual Perception (Academic, 1970).5. R. N. Shepard and L. A. Cooper, “Representation of colors
in the blind, color blind, and normally sighted,” Psychol.Sci. 3, 97–104 (1992).
6. D. Farnsworth, The Farnsworth–Munsell 100 Hue Test forthe Examination of Color Vision (Munsell Color Company,1949/1957).
7. K. Mantere, J. Parkkinen, M. Mäntyjärvi, and T.Jaaskelainen, “Eigenvector interpretation of theFarnsworth–Munsell 100-hue test,” J. Opt. Soc. Am. A 12,2237–2243 (1995).
8. R. S. Cook, P. Kay, and T. Regier, “The World Color Survey
database: history and use,” in Handbook of Categorisationin Cognitive Science, H. Cohen and C. Lefebvre, eds.(Elsevier, 2005), pp. 223–242.
9. T. Regier, P. Kay, and R. S. Cook, “Focal colors areuniversal after all,” Proc. Natl. Acad. Sci. U.S.A. 102,8386–8391 (2005).
0. J. Birch, Diagnosis of Defective Colour Vision, 2nd ed.(Butterworth-Heinemann, 2001).
1. J. H. Nelson, “Anomalous trichromatism and its relation tonormal trichromatism,” Proc. Phys. Soc. 50, 661–702(1938).
2. J. Pokorny, V. C. Smith, G. Verriest, and A. J. L. G.Pinckers, Congenital and Acquired Color Vision Defects(Grune & Stratton, 1979).
3. G. Wyszecki and W. Stiles, Color Science: Concepts andMethods, Quantitative Data and Formulae, 2nd ed. (Wiley,1982).
4. L. T. Sharpe, A. Stockman, H. Jägle, and J. Nathans,“Opsin genes, cone photopigments, color vision, and colorblindness,” in Color Vision: From Genes to Perception, K. R.Gegenfurtner and L. T. Sharpe, eds. (Cambridge U. Press,1999), pp. 3–51.
5. B. Sayim, K. A. Jameson, N. Alvarado, and M. K. Szeszel,“Semantic and perceptual representations of color:evidence of a shared color-naming function,” J. Cogn.Culture 5, 427–486 (2005).
6. Farnsworth–Munsell Scaling Software, Version 2.1(MacBeth Division of Kolmorgen Corporation, 1997).
7. D. Farnsworth, “The Farnsworth–Munsell 100-Hue andDichotomous Tests for color vision,” J. Opt. Soc. Am. 33,568–578 (1943).
8. S. J. Dain, “Clinical colour vision tests,” Clin. Exp. Optom.87, 276–293 (2004).
9. The number of sequence inversions (of adjacent caps)needed to recreate a perfect order from the sorting data.
0. Assuming that dichromats perform similarly to normalsaway from confusion axes, despite the suggestion of error-free performance outside dichromat local confusion regionsin Fig. 1.
1. These confusion regions closely resemble some [17] basedon the standard Farnsworth method of scoring [16].
2. P=0 models an ideal normal-observer’s sorting of theFM100 85 caps with zero error (see [7]), whereas a realisticnormal-observer model sorts the 85 caps with probabilistic�p�0� error.
3. W. R. Garner, The Processing of Information and Structure(Erlbaum, 1974).
4. K. Jameson and R. G. D’Andrade, “It’s not really red, green,yellow, blue: An inquiry into cognitive color space,” in ColorCategories in Thought and Language, C. L. Hardin and L.Maffi, eds. (Cambridge U. Press, 1997), pp. 295–319.
5. K. A. Jameson, “Culture and cognition: What is universalabout the representation of color experience?” J. Cogn.Culture 5, 293–347 (2005).
6. K. A. Jameson, “Sharing perceptually grounded categoriesin uniform and nonuniform populations,” Behav. Brain Sci.
28, 501–502 (2005).