Embed Size (px)
Citation preview

doi: 10.1111/j.1742-7363.2006.0036.x
Endogenous business cycles and dynamic inefficiency
Guido Cazzavillan∗ and Patrick A. Pintus†
This paper explores how the occurrence of local indeterminacy and endogenousbusiness cycles relates to dynamic inefficiency, as defined by Malinvaud (1953),Phelps (1965) and Cass (1972). We follow Reichlin (1986) and Grandmont (1993)by considering a two-period overlapping generations model of capital accumulationwith labor–leisure choice into the first-period of an agent’s life and consumptionin both periods. We first show that local indeterminacy and Hopf bifurcation arenecessarily associated with a capital–labor ratio that is, at steady state, larger thanthe Golden Rule level. Consequently, paths converging asymptotically towards thesteady state are shown to be dynamically inefficient, as there always exists anothertrajectory that starts with the same initial conditions and produces more aggregateconsumption at all future dates. More surprising, however, is our main result showingthat stable orbits, generated around a dynamically inefficient steady state through asupercritical Hopf bifurcation, may, in contrast, be dynamically efficient.
Key words overlapping generations, endogenous labor supply, multiple equilibria,endogenous fluctuations, dynamic inefficiency
JEL classification C62, D61, E32
Accepted 7 March 2006
1 Introduction
This paper explores how the occurrence of local indeterminacy and endogenous businesscycles relates to dynamic inefficiency, as defined by Malinvaud (1953), Phelps (1965) andCass (1972). We follow Reichlin (1986) and Grandmont (1993) by considering a two-periodoverlapping generations (OLG) model of capital accumulation with labor–leisure choiceinto the first–period of an agent’s life and consumption in both periods (see also studiesof related models by, among others, Woodford (1984), Geanakoplos and Polemarchakis
∗Department of Economics, University Ca’Foscari of Venice, Venice, Italy. Email: [email protected]
†Department of Economics, University of the Mediterranee and GREQAM-IDEP, Marseille, France.This paper was written for the conference in honor of Jean-Michel Grandmont, held in Lisbon on 30–31
October 2005. This is our modest contribution both to celebrate Jean-Michel’s scientific achievements andto thank him for his impulse on our personal and professional lives. We thank participants, especially SubirChattopadhyay, Jean-Michel Grandmont, Cars Hommes, Guy Laroque, Kazuo Nishimura, as well as a referee forhelpful comments on the first version of this paper. Finally, we thank David de la Croix and the late PhilippeMichel for discussions on the overlapping generations model.
International Journal of Economic Theory 2 (2006) 279–294 C© IAET 279

Endogenous business cycles and dynamic inefficiency Guido Cazzavillan and Patrick A. Pintus
(1986), Benhabib and Laroque (1988), d’Aspremont et al. (1995), Lloyd-Braga (1995), deVilder (1996) Cazzavillan and Pintus (2006) and Nourry and Venditti (2006)). We showthat local indeterminacy and Hopf bifurcations are necessarily associated with a capital–labor ratio that is, at the steady state, larger than the Golden Rule level. Consequently, pathsconverging asymptotically towards the steady state are shown to be dynamically inefficient,as there always exists another trajectory that starts with the same initial conditions andproduces more aggregate consumption at all future dates. More surprisingly, however, ourmain result shows that stable orbits, generated around a dynamically inefficient steadystate through a supercritical Hopf bifurcation, might, in contrast, be dynamically efficient.Therefore, an inefficient stationary solution might coexist with an efficient invariant closedcurve that surrounds it.
The interest of exploring such a topic is spurred by the fact that the large literature onindeterminacy in growth models has paid little attention to the Pareto-optimality propertiesof the allocations associated with the existence of a continuum of intertemporal equilibriaall converging to the stationary solution (see, however, Chattopadhyay and Gottardi (1999),Montrucchio (2004) and Pietra (2004), among many others, for studies of optimality inpure exchange economies). Because dynamic efficiency is a necessary condition for Pareto-optimality, we considered it important to explore how such an issue relates to indeterminateequilibria.
By studying a broad class of OLG economies, we have proven that the conclusionsof Reichlin’s (1986) section 3 and appendix are questionable, as the steady state, evenclose to the Leontief case, turns out to always be dynamically inefficient, and hence notPareto optimal. Such a result has remarkable implications as it implies that stabilizationpolicies conducted by the governments to eliminate endogenous fluctuations, such asthose considered by Reichlin’s (1986) section 3, might lead to a dynamically inefficientsteady state. Therefore, such policies do not avoid the welfare loss associated with dynamicinefficiency. However, our results suggest that simple policies that aim at restoring dynamicefficiency, through public debt or pensions for instance, might also be powerful enough torule out indeterminacy and endogenous business cycles. We also qualify the often statedview that no general connection between indeterminacy and efficiency should be expected(e.g. Woodford 1984).
Our analysis is fairly general so that the direct approach provided by Cass (1972) andgeneralized by Benveniste (1976), based on the consideration of the technological side only,can be extended to frameworks that also take into consideration the consumption side (i.e.preferences). An early paper by Cass and Yaari (1966) is a study along similar lines, using amodel with neither labor nor capital. In this paper, we build upon previous results by Pintus(1997) proving that the indeterminate steady state is dynamically inefficient. More recently,Lloyd-Braga et al. (2004) consider an OLG framework and show that local indeterminacyalso occurs when the steady state is dynamically efficient. However, the latter result relieson externalities that are driven by labor only, in which case the definition of the GoldenRule turns out to be unaltered by the presence of external effects (in contrast with thenontrivial case of capital externalities studied by Cazzavillan (2001) and Cazzavillan andPintus (2004)). However, none of these studies establish, as we do in the present paper, thatan inefficient steady state might be surrounded by efficient stable orbits.
280 International Journal of Economic Theory 2 (2006) 279–294 C© IAET

Guido Cazzavillan and Patrick A. Pintus Endogenous business cycles and dynamic inefficiency
The paper is organized as follows. Section 2 introduces the model and derives the twodimensional dynamical system that generates competitive intertemporal equilibria withperfect foresight. Section 3 establishes the link that exists between a locally indeterminatenormalized steady state and Hopf bifurcations and dynamic inefficiency. In Section 4 weprovide a simple example that illustrates the general results stated in Section 3. Section 5concludes.
2 The model
We consider a competitive, non-monetary, overlapping generations model with production.The framework involves a unique perishable good, which can be either consumed or saved asan investment, a large number of identical competitive firms all facing the same technology,and a constant population composed of households living over two periods. Agents, whoare identical within each generation, consume in both periods, supply labor and save whenyoung. When old, their saved income is rented as physical capital to the firms.
Assuming additively separable preferences and letting �t , c1t and zt be labor, consump-tion and savings (i.e. capital demand), respectively, of an individual of the young generation,and c2t + 1 be the consumption of the same individual when old, an economic agent bornat time t ≥ 0 solves the following maximization program:
Max [U1(c1t/B) − U3(�t ) + U2(c2t + 1)]
subject to the constraints
c1t + zt = �t�t (1)
c2t + 1 = Rt + 1zt (2)
c1t ≥ 0, c2t + 1 ≥ 0, � ≥ �t ≥ 0, for all t ≥ 0,
where �t > 0 and Rt + 1 > 0 represent the real wage at time t and the gross interest rateat time t + 1, whereas B > 0 is a scaling parameter (which will be set appropriately so asto normalize the steady state under study; see next section) and � is the maximum availableamount of labor.
On the preferences introduced in the above maximization problem, we shall make thefollowing assumptions.
Assumption 1 The functions U1(c/B), U2(c)and U3(�)are defined and continuous onthe set �+. Moreover, they are Cr , for r large enough, on the set �+ +, with U ′
1(c/B) >
0, U ′2(c) > 0, U ′
3(�) > 0, U ′′1 (c/B) < 0, U ′′
2 (c) < 0, U ′′3 (�) > 0, Lim�→� U ′
3(�) =+∞, where � > 1, and Lim�→0 U ′
3(�) = 0. In addition, 0 < R1(c/B) ≡ − (c/B)U ′′
1 (c/B)/U ′1(c/B) < 1, 0 < R2(c) ≡ − c U ′′
2 (c)/U ′2(c) < 1, and R3(�) ≡ �U ′′
3 (�)/U ′
3(�) > 0.
The conditions 0 < R1(c/B) < 1 and 0 < R2(c) < 1 in Assumption 1 ensure thatconsumption in both periods and leisure are gross substitutes, and that the saving functionis increasing in the gross interest rate R.
International Journal of Economic Theory 2 (2006) 279–294 C© IAET 281

Endogenous business cycles and dynamic inefficiency Guido Cazzavillan and Patrick A. Pintus
When the solution of the households, maximization problem is interior, the first orderconditions are:
U ′1(c1t/B)/B = U ′
3(�t )/�t = U ′2(c2t + 1)Rt + 1. (3)
Because the function U ′1(c/B)is strictly decreasing, hence invertible, and U ′
3(�) is onto�+ in view of Assumption 1, the first equality in (3) can be used to obtain the expressionfor current consumption, which can be written as:
c1t = B(U ′1)− 1
(B
U ′3(�t )
�t
). (4)
From the budget constraint in (1), faced by a young agent, one gets:
zt = �t�t − B(U ′1)− 1
(B
U ′3(�t )
�t
). (5)
Multiplying both members of the last equality in (3) by zt yields:
Rt + 1zt = u − 12
(U ′
3(�t )
�tzt
), (6)
where u2(c2t + 1) ≡ c2t + 1 U ′2(c2t + 1) is strictly increasing in view of Assumption 1.
Output, denoted by y, is produced using capital k and labor �. We shall assume that thetechnology is given by the aggregate production function y = AF (k, �), where A > 0 isa productivity scaling factor. The production function satisfies the following properties.
Assumption 2 F (k, �) is defined, continuous, strictly concave on the set �2+, and homo-
geneous of degree one; that is, F (k, �) ≡ � f (a),with a ≡ k/�. Moreover, f ′(a) > 0and f ′′(a) < 0, for all a > 0. It follows that the functions ρ(a) ≡ f ′(a) > 0 andω(a) ≡ f (a) − a f ′(a) > 0 are, respectively, decreasing and increasing.
Each firm, behaving competitively, seeks to maximize profits, taking factor prices asgiven. Letting 0 ≤ δ ≤ 1 and q = R + δ − 1 > 0 be the (constant) per-period depre-ciation rate and the rental on capital stock, respectively, equilibrium factor prices are givenby
� = Aω(a) ≡ �(a), R = Aρ(a) + 1 − δ ≡ R(a). (7)
Equation (5), (6) and (7) can be combined to derive a two-dimensional dynamicalsystem, described below in (8) and (9), which generates the intertemporal equilibria withperfect foresight of the economy under study:
kt + 1 = �(at )kt
at− B
(U ′
1
)− 1(
BU ′3(kt/at )
�(at )
), (8)
R(at + 1)kt + 1 = u − 12
(U ′
3(kt/at )
�(at )kt + 1
). (9)
282 International Journal of Economic Theory 2 (2006) 279–294 C© IAET

Guido Cazzavillan and Patrick A. Pintus Endogenous business cycles and dynamic inefficiency
3 Local indeterminacy, Hopf bifurcations and dynamic inefficiency
The dynamical system (8)–(9) has an interior steady state (not necessarily unique) if thefollowing holds.
Proposition 1 Under Assumptions 1 and 2 (a∗, k∗) > 0 is a steady-state of the dynamicalsystem (8)–(9) if and only if :
a∗u2
(k∗(
a∗ρ(a∗)
ω(a∗)+ 1 − δ)
)< k∗U ′
3(k∗/a∗) and
Limc→0 cU ′1(c) <
k∗(A∗ω(a∗)/a∗ − 1)
A∗ω(a∗)U ′
3(k∗/a∗),
where A∗ > a∗/ω(a∗) is the unique solution of k∗(Aρ(a∗) + 1 − δ) =u − 1
2 (k∗ U ′3(k∗/a∗)
Aω(a∗) ).
PROOF: See Appendix. �
To characterize the local dynamics generated by the dynamical system (8) and (9),one may focus on the determinant and the trace of the linear map associated with theJacobian matrix evaluated at the steady state (a∗, k∗) > 0 whose existence, according toProposition 1, will be assumed throughout the section. Let ε� and εR be the elasticities ofthe functions �(a) and R(a) evaluated at the steady-state (a∗, k∗) > 0. In addition, letθ ≡ �(a∗)/a∗ = A∗ω(a∗)/a∗ > 1 (see Proposition 1 above), R1 ≡ R1(c∗
1/B∗), R2 ≡R2(c∗
2 ), and R3 ≡ R3(�∗). Then, the expressions of the trace T and the determinant D aregiven by:
D = θε�
|εR |(
1 + R3
1 − R2
), (10)
and
T = θ + θ − 1
R1R3 + 1
(1 − R2) |εR |×
[R3 + ε� + R2
(θ − 1
R1(R3 + ε�) − θ (ε� − 1)
)],
(11)
where the elasticities of �(a) and R(a) can be rewritten as1
ε� = s (a)
σ (a), |εR | = µ(a)
(1 − s (a)
σ (a)
), (12)
with 0 < µ(a) ≡ q(a)/R(a) = s (a)θ(a)/(s (a)θ(a) + (1 − s (a))(1 − δ)) ≤ 1.
1 One can easily check that �′(a) = − aq ′(a) and, therefore, that aρ(a)/ f (a) = σ (a)ε�(a) andω(a)/ f (a) = σ (a)|εq (a)|, where the elasticity of input substitution is σ (a) = (ε�(a) − εq (a)) − 1 ≥ 0 withε�(a) and εq (a) representing the elasticities of the real wage �(a) and of the rental on capital q(a) = R(a) −1 + δ. In addition, one also gets 0 < µ(a) ≡ q(a)/R(a) = s (a)θ(a)/(s (a)θ(a) + (1 − s (a))(1 − δ)) ≤ 1.
Rearranging these expressions yields the elasticities in (12).
International Journal of Economic Theory 2 (2006) 279–294 C© IAET 283

Endogenous business cycles and dynamic inefficiency Guido Cazzavillan and Patrick A. Pintus
The local dynamic analysis of the model has already been undertaken in Cazzavillanand Pintus (2004). Therefore, we shall refer the reader to that paper for details. To help ininterpretation of the model, it isuseful to relate the parameter θ ≥ 1 to the consumption-to-wage ratio: (1) shows that c1/(��) = (θ − 1)/θ (alternatively, k/(��) = 1/θ is theratio of savings over wage income). In particular, one can recover the results by Reichlin(1986), when δ = 1, and by Grandmont (1993) when restricting to the case θ = 1 (noconsumption in the first period of life) and σ = 0 (Leontief technology). The steady stateis locally indeterminate when the propensity to consume out of the wage income is small;that is, when θ is close enough to 1 (and also when the share of capital in total income issufficiently low, the elasticity of labor supply with respect to real wage is large enough, thefirst-period utility is close to logarithmic, the second-period utility is close to linear, and theelasticity of input substitution is small) (Cazzavillan and Pintus 2004). All these featuresare obviously related to the conditions leading to local indeterminacy in the model studiedby Reichlin (1986) and Grandmont (1993), which can be considered as a limit case of oursetting involving consumption in both periods.
For the purpose of the present investigation it is important to stess that there are dynamicregimes in which the stationary solution (a∗, k∗) > 0 is a sink that then undergoes a Hopfbifurcation as the selected bifurcation parameter (say φ) is increased while keeping all otherparameters fixed (see Cazzavillan and Pintus 2004). On the basis of such knowledge, we canrelate the existence of both a locally indeterminate steady state and periodic or quasiperiodicorbits to dynamic inefficiency. The next proposition establishes a first general result.
Following Phelps (1965), we first define the Golden Rule level of the capital–laborratio.
Definition 1 Under the assumptions of Proposition 1, there exists a unique capital–labor ratio such that A∗ f ′(a∗
G R) = δ, provided that Lima→ + ∞ A∗ f ′(a) < δ <
Lima→0 A∗ f ′(a). The level a∗G R is the Golden Rule capital–labor ratio.
The level a∗G R characterizes productive efficiency. Given the assumption of market
clearing, one has that stationary aggregate consumption equals net production; that is, c∗1 +
c∗2 = A∗�∗ f (k∗/�∗) − δk∗. Production efficiency is then characterized by A∗ f ′(a∗
G R) =δ, which defines the Golden Rule steady state capital–labor ratio a∗
G R , under the assumptionsof Definition 1.
Proposition 2 Under the assumptions of Definition 1, local indeterminacy and Hopf bifur-cation of the steady state (a∗, k∗) > 0 imply a∗ > a∗
G R , or equivalently A∗ f ′(a∗) < δ;that is, the stationary capital–labor ratio is larger than the Golden Rule level.
PROOF: See Appendix. �
The statement in the above proposition is in contrast with Reichlin’s (1986) appendixand arguably casts some doubt on the desirability of stabilization policies pushing theeconomy towards the steady state, as defined in his section 3. However, the result is inagreement with the intuition that both local indeterminacy and Hopf bifurcations rely on high
284 International Journal of Economic Theory 2 (2006) 279–294 C© IAET

Guido Cazzavillan and Patrick A. Pintus Endogenous business cycles and dynamic inefficiency
savings rates (that is, on large values of 1/θ). When, on the contrary, the savings rate is low,agents arbitrage away expectation-driven business cycles. For sake of brevity, we mentionhere, without formal proof, the fact that a dynamically efficient steady state is always asaddle point in the class of models under study.
We next define, after Phelps (1965) and Diamond (1965), the Golden Age.
Definition 2 Under the assumptions of Definition 1, there exists a unique stationaryallocation, defined as the Golden Age, with a∗ = a∗
G R , c∗1 = c∗
1G R , c∗2 = c∗
2G R , �∗ = �∗G R ,
and
U ′1(c∗
1G R/B∗)/B∗ = U ′3(�∗
G R)/�(a∗G R) = U ′
2(c∗2G R).
It is straightforward to show that the Golden Age characterizes steady–state Pareto-optimality, which also implies that the Golden Rule level is achieved.
Our task now is to examine the dynamic (in)efficiency of orbits around the normalizedsteady state by looking at the paths of capital and labor. Adapting the direct approachadvocated by Cass (1972) proves to be useful. Denoting {kt} = {k0, k1, · · ·} and {�t} ={�0, �1, · · ·}, with a ≡ k/�, a particular path solving (8)–(9), one has:
Definition 3 A path of the capital stock {k0t } is said to be dynamically inefficient (re-
spectively, efficient) if and only if there is, given {�t}, some (respectively, no) other path{k1
t
}that provides more consumption for some periods and never less consumption, or
equivalently C(k1t , k1
t + 1, �t ) ≥ C(k0t , k0
t + 1, �t ), with strict inequality for some t , whereC(kt , kt + 1, �t ) ≡ A∗ F (kt , �t ) − kt + 1 + (1 − δ)kt defines total consumption in date t .
The following lemma, adapted from Cass (1972), provides a convenient necessary andsufficient condition for dynamic inefficiency.
Lemma 1 A path of the capital stock{
kt
}is inefficient if and only if, given
{�t
}, there exists
a sequence of capital stock decrements{εt
} = {ε0, ε1, · · ·} such that
εt + 1 ≥ Fk(kt − εt , �t )εt and εt > 0,
where F (k, �) ≡ A∗ F (k, �) + (1 − δ)k and Fk(·) ≡ ∂ F (·)/∂k.
To save space, the proof is omitted, as it follows from adapting the proofs of propositions1 and 4 in Cass (1972).
The next Proposition follows as a mere implication of Proposition 2.
Proposition 3 Let φ be the selected bifurcation parameter. Then, under the assumptions ofProposition 2, the following holds.
(i) If the steady state (a∗, k∗) > 0 is a sink (hence, locally indeterminate), there existsa non-empty neighborhood W of (a∗, k∗) > 0 such that, for all initial conditions(a0, k0) ∈ W , intertemporal equilibria are dynamically inefficient.
International Journal of Economic Theory 2 (2006) 279–294 C© IAET 285

Endogenous business cycles and dynamic inefficiency Guido Cazzavillan and Patrick A. Pintus
(ii) If the steady–state (a∗, k∗) > 0 undergoes a subcritical Hopf bifurcation at the param-eter value φ = φH , there exist both a non-empty interval I ≡ (φH − ε, φH ) , for someε > 0 , and a non-empty neighborhood W of (a∗, k∗) > 0 contained in the interior ofthe unstable Hopf curve such that, for all φ ∈ I and all initial conditions (a0, k0) ∈ W ,intertemporal equilibria are dynamically inefficient.
PROOF: See Appendix. �
Case (ii) in Proposition 3 covers the case where the neighborhood W of the steadystate shrinks when the bifurcation parameter φ tends, from below, to the subcritical Hopfbifurcation value φH .
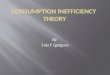
To show that allocations that are associated with cases (i) and (ii) are not Pareto optimalis straightforward, as dynamic efficiency is easily proved to be a necessary condition ofPareto-optimality of consumption levels along the life cycle that turns out to be unsatisfiedhere. In particular, Proposition 3 involves a neighborhood that does not intersect the“Golden Rule frontier” a = a∗
G R (see Figure 2). However, we now state some conditionsunder which endogenous cycles are dynamically efficient and coexist with a dynamicallyinefficient steady state (a∗, k∗) > 0. In addition, in the next paragraph a specific examplewill be provided to show how such a result can be generated.
Proposition 4 Under the assumptions of Proposition 1, suppose that the steady-state(a∗, k∗) > 0 undergoes a supercritical Hopf bifurcation at φ = φH . Then one gets thefollowing:
(i) If the Hopf curve contains periodic orbits with period τ, intertemporal equilibria aredynamically efficient if and only if
∏τ − 1s = 0 Rs ≥ 1.
(ii) If the Hopf curve contains quasiperiodic orbits, intertemporal equilibria are dynamicallyefficient if and only if L imt→ + ∞
∑ts = 0
∏s − 1r = 0 Rr = +∞ ,
where Rt ≡ Fk(kt , �t ) = A∗ Fk(kt , �t ) + 1 − δ.
PROOF: See Appendix.
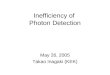
One implication of (i) and (ii) in Proposition 4 is that dynamic efficiency obtains, whenφ ∈ I ≡ (φH , φH + ε) with some ε > 0, only if the stable Hopf curve surrounding theunstable steady state has a non-empty intersection with the Golden Rule frontier a = a∗
G R
(see Figure 3), as we now see in an example.
4 An example
For illustrative purposes we now present a simple example that will allow the reader toappreciate the qualitative behavior of the local dynamics as well as the intuition behind thelink between indeterminacy and dynamic inefficiency.To the non-specialized reader it isworthwile pointing out that a simple way to analyze the local stability of the steady-state
286 International Journal of Economic Theory 2 (2006) 279–294 C© IAET

Guido Cazzavillan and Patrick A. Pintus Endogenous business cycles and dynamic inefficiency
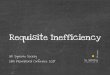
(a∗, k∗) > 0 is to study the variation of the trace T and the determinant D in the (T , D)plane when some parameters of interest are made to vary continuously (see Grandmontand Laroque 1993; Azariadis, 1993; Grandmont et al. 1998). There is a local eigenvalueequal to +1 when 1 − T + D = 0, which is represented by the line (AC) in Figure 1.However, one eigenvalue is equal to – 1 when 1 + T + D = 0; that is, when (T , D)lies on the line (AB). Finally, the two eigenvalues are complex conjugate of modulus 1,when (T , D) belongs to the segment [BC] of equation D = 1, |T | ≤ 2. Because bothcharacteristic roots are equal to zero when T = D = 0, then, by continuity, they havemodulus less than 1 if and only if (T , D) belongs to the interior of the triangle ABC (seeFigure 1) defined by |T | < |1 + D|, |D| < 1. In this case, the steady state is asymptot-ically stable in the forward perfect foresight dynamics; that is, locally indeterminate giventhat the unique predeterminate variable is k. When |T | > |1 + D|, instead, the stationarystate is a saddle-point, hence locally determinate. Finally, in the complementary region|T | < |1 + D|, |D| > 1, the steady state is a source, hence locally determinate.
The diagram reported in Figure 1 is also useful for analyzing local bifurcations. Whenthe point (T , D) crosses the interior of the segment [BC], one generically expects a Hopfbifurcation; that is, a change of stability in which the eigenvalues are complex conjugate andcross the unit circle in the complex plane. If, instead, the point crosses the line (AB), oneeigenvalue goes through –1. In that case, a flip bifurcation is expected, generically, to occur.Finally, when the point crosses the line (AC), one eigenvalue goes through +1. In sucha case, one generally expects an exchange of stability between (a∗, k∗) > 0 and another(respectively, two) steady state(s) through a transcritical bifurcation (respectively, a pitchforkbifurcation).
One can then easily look at local stability and bifurcations simply by locating the half-line � in the (T , D) plane when a parameter varies while all other parameters are keptfixed.
In the present context we simplify matters by assuming that R2 = σ = 0 and byholding fixed all parameters with the exception of R3, which is free to increase from 0 to+∞. In that case, according to (10)–(12), the expressions of the determinant and the traceare:
D(R3) = θs
µ(1 − s )(1 + R3) > 0 and T(R3) = θ + θ − 1
R1R3 + s
µ(1 − s )> 1,
with µ = (sθ)/(sθ + (1 − s )(1 − δ)). The � line is then generated when R3 increasesfrom 0 to +∞. In particular, the origin of � is located on the line (AC) at the point ofcoordinates (T(0), D(0)) = (θ + s/[µ(1 − s )], (sθ)/[µ(1 − s )]), whereas its slope isequal to (sθ R1)/(µ(1 − s )(θ − 1)) and decreases from +∞ to s R1/(1 − s ) when θ
increases from one to +∞. From direct inspection one can see that local indeterminacyand Hopf bifurcation obtain, by construction, if D(0) < 1; that is, if s < δ(1 − s ) whenθ = 1. One also sees that the slope of the half-line � is decreasing with θ from +∞, whenθ = 1, to (s R1)/(1 − s ), which is less than 1 provided that D(0) < 1. As for the originalong the (AC) line, it is easy to verify that it moves with θ along a line �1 the slope ofwhich is s/(µ(1 − s )). The latter is less than 1 whenever D(0) < 1; that is, s < δ(1 − s ).
International Journal of Economic Theory 2 (2006) 279–294 C© IAET 287

Endogenous business cycles and dynamic inefficiency Guido Cazzavillan and Patrick A. Pintus
1
101
1 A
B C
T
D1=
1∆
HRR 33 =
∞
+∞=3R
1> c=
)1( s
s
µ
)1(1
s
s+µ
Figure 1 An example with Leontief technology.
As a result, provided that the inequality s < δ(1 − s ) holds, one obtains the con-figuration shown in Figure 1. Notice that, by continuity, as θ is moved from 1 to +∞,there exists a θ c such that � goes through the point C. It follows that one obtains localindeterminacy and Hopf bifurcations only in the interval [1, θ c ). The corresponding bifur-cation point within that interval is found by solving D(R3) = 1 and yields the bifurcationvalue R3H = (µ(1 − s ))/(θ s ) − 1. Consequently, being such a non-empty regime, wecan now focus on the results stated in Proposition 4.
Suppose that:
U1(c1) = (c1/B)1 −α1
1 − α1, U2(c2) = c2, U3(�) = �1 + α3
1 + α3,
where 0 ≤ α1 ≤ 1, α3 ≥ 0, and B > 0. In addition, let the intensive production func-tion be
f (a) = A(s a − ρ + 1 − s
)− 1/ρ, with ρ ≥ − 1.
288 International Journal of Economic Theory 2 (2006) 279–294 C© IAET

Guido Cazzavillan and Patrick A. Pintus Endogenous business cycles and dynamic inefficiency
2
a
k
0
*k
*GRa
31
Figure 2 A dynamically inefficient period-3 cycle.
In view of Proposition 1, one can set the steady state (a∗, k∗) at (1, 1) provided that
A∗ = [s (1 − s )]− 1/2
and
B∗ = [(1 − s )A∗((1 − s )A∗ − 1)− α1
] 11 − α1 .
One can then simply obtain the expression of the Golden Rule through simply algebra:
a∗G R =
[((s A∗δ − 1
)ρ/(1 + ρ) − s)
/(1 − s )]1/ρ
.
Notice that a∗G R tends to 1 when ρ → +∞ if A∗ > δ (a condition that holds when
s = 1/3). It follows that a∗ = a∗G R holds in the limiting Leontief case. For the specific
example studied in this section we have checked that the (locally indeterminate) normalizedsteady state undergoes a supercritical Hopf bifurcation.
It is then possible to give the reader a complete qualitative overview of what happensin a neighboorhood of the stationary solution and illustrate case (i) as stated inProposition 4.
Figures 2 and 3 represent, in the (a , k) plane, the normalized steady state (a∗G R , k∗), a
period-3 cycle, and a dashed area in which dynamic inefficiency prevails; that is, the regionwhere A∗ f ′(a) < δ or, equivalently, a > a∗
G R . In both pictures the steady state is unstable,hence locally determinate, whereas the period-3 cycle is stable for some R3 > R3H .
International Journal of Economic Theory 2 (2006) 279–294 C© IAET 289

Endogenous business cycles and dynamic inefficiency Guido Cazzavillan and Patrick A. Pintus
a
k
0
*k
*GRa
2
3
1
Figure 3 A dynamically efficient period-3 cycle.
Let Ri ≡ A∗ f ′(ai ) + 1 − δ, for i = 1, 2, 3, define the real gross interest rate evaluatedat point i. Hence, one gets, as reported in Figure 2, that a dynamically inefficient period-3cycle obtains when R1 R2 R3 < 1; that is, when the points 2 and 3 located in the dynamicinefficiency region “dominate” the point 1. On the contrary, Figure 3 depicts a dynamicallyefficient period-3 cycle provided that R1 R2 R3 ≥ 1. This is again the case where the points2 and 3 “dominate” the point 1.
5 Concluding remarks
This paper has explored how the occurrence of local indeterminacy and endogenous busi-ness cycles relates to dynamic inefficiency, in a standard two period OLG model of capitalaccumulation with labor–leisure choice into the first period of agents’ life and consumptionin both periods. We have shown that local indeterminacy and subcritical Hopf bifurcationsare necessarily associated with paths converging asymptotically towards the steady statethat are dynamically inefficient. Most interesting is our main result showing how stableorbits, generated around a dynamically inefficient steady state through a supercritical Hopfbifurcation, may, in contrast, be dynamically efficient. Therefore, an inefficient stationarysolution may coexist with an efficient invariant closed curve that surrounds it. One alsoexpects that sunspots moving the economy away from an inefficient steady state for asufficiently long time might not be inefficient.
Such a result has nontrivial implications as it implies that stabilization policies con-ducted by governments to eliminate endogenous fluctuations might lead to a dynamicallyinefficient steady state. However, our results suggest that simple policies restoring dynamic
290 International Journal of Economic Theory 2 (2006) 279–294 C© IAET

Guido Cazzavillan and Patrick A. Pintus Endogenous business cycles and dynamic inefficiency
efficiency, through public debt or pensions for instance, might be powerful enough torule out indeterminacy and endogenous business cycles. A systematic investigation of suchpolicies should be the subject of future research.
Appendix
PROOF OF PROPOSITION 1: The solution (a , k), with a > 0 and k > 0, is a steady state of (8) and (9) if and
only if:
k = Akω(a)/a − B(U ′1) − 1
(B
U ′3(k/a)
Aω(a)
), (13)
k(Aρ(a) + 1 − δ) = u − 12
(k
U ′3(k/a)
Aω(a)
). (14)
Equation (14) can be conveniently rewritten as
Aω(a)u2(Akρ(a) + (1 − δ)k) = kU ′3(k/a). (15)
Under Assumption 2, both ω(a) and ρ(a) are finite. In contrast, under Assumption 1, the left-hand side of
(15) is increasing in A, as u2 ≡ cU ′2(c)is increasing when R2(c) < 1 , for all c > 0, whereas the right-hand side is
constant and finite (as long as � > k/a). Whenever it exists, then, there is a unique positive A∗that satisfies (15).
Moreover, one easily shows that the first-period consumption at the steady-state (a , k) is positive if and only if
the so-computed A∗ is such that A∗ > a/ω(a). Existence, therefore, requires the following boundary condition:
au2
(k
(aρ(a)
ω(a)+ 1 − δ
))< kU ′
3(k/a). (16)
Next, we want to solve (13) for B, given A = A∗. Such an equation can be rearranged to get:
k(A∗ω(a)/a − 1)
BU ′
1
(k(A∗ω(a)/a − 1)
B
)= k(A∗ω(a)/a − 1)
A∗ω(a)U ′
3(k/a). (17)
From direct inspection, one sees that, as long as R1(c) < 1, for all c > 0, as postulated in Assumption 1,
the left-hand side of (17) is decreasing in B and tends to infinity when B goes to zero. Therefore, by imposing the
boundary condition
Limc→0 cU ′1(c) <
k(A∗ω(a)/a − 1)
A∗ω(a)U ′
3(k/a), (18)
it is possible to ensure the existence of a unique B∗> 0 that solves (17), given A = A∗. As a result, there are
unique constants A∗ > 0 and B∗ > 0 such that (a , k) is a stationary solution of the system (8) and (9) if and
only if the two inequalities (16) and (18) are satisfied. �
PROOF OF PROPOSITION 2: Local indeterminacy and Hopf bifurcation of the normalized steady state necessarily
require D ≤ 1. From (10), D = θε�|εR | ( 1 + R3
1 − R2) so that D ≤ 1 implies θ < |εR |/ε�. The latter inequality
may be rewritten as θ < θ ≡ δ(1 − s (a∗))/s (a∗). Recalling that by definition θ = A∗�∗ω(a∗)/k∗, one has
that θ = A∗�ω(a∗)/k∗ = A∗ρ(a∗)(�∗ω(a∗)/(k∗ρ(a∗)) or θ = A∗ f ′(a∗)(1 − s (a∗))/s (a∗). Therefore, one
gets that θ < θ is equivalent to A∗ f ′(a∗) < δ ≡ A∗ f ′(a∗G R ) or, more simply, a∗ > a∗
G R . When either local
indeterminacy or Hopf bifurcation of the steady state occurs, the stationary value of the capital–labor ratio is
necessarily larger than the Golden Rule level. �
International Journal of Economic Theory 2 (2006) 279–294 C© IAET 291

Endogenous business cycles and dynamic inefficiency Guido Cazzavillan and Patrick A. Pintus
PROOF OF PROPOSITION 3: We know from Proposition 2 that both local indeterminacy and Hopf bifurcation of the
steady-state (a∗, k∗) > 0 are associated with over-accumulation with respect to the Golden Rule, at the steady
state. To show the dynamic inefficiency of paths converging to the steady state, we now simply prove that there
exists, in the positive orthant of the plane, a neighborhood W of (a∗, k∗) > 0 that has an empty intersection with
the Golden Rule frontier a = a∗G R . We show that, for all initial conditions (a0, k0) ∈ W , aggregate consumption
can be increased forever, starting at any date t0, by lowering the capital stock at t0.
Suppose first that such a neighborhood W exists. Then for all (a0, k0) ∈ W and all t ≥ t0, one then has
A∗ Fk (k − ε, �) < δ for some ε > 0; that is, over-accumulation prevails. Recalling that aggregate consumption
equals net production minus investment, we may define the former quantity as:
C (kt , kt + 1, �t ) ≡ A∗ F (kt , �t ) − kt + 1 + (1 − δ)kt . (19)
Suppose that we reduce, at date t0, the capital stock kt + 1 by ε so that aggregate consumption at date t0 is
increased by ε. Then, for all t > t0, aggregate consumption is given by :
C (kt − ε, kt + 1 − ε, �t ) ≡ A∗ F (kt − ε, �t ) − (kt + 1 − ε) + (1 − δ)(kt − ε). (20)
By concavity of production (Assumption 2), one has: F (k − ε, �) ≥ F (k, �) − ε Fk (k − ε, �). Therefore,
it follows that:
C (kt − ε, kt + 1 − ε, �t ) ≡ A∗ F (kt − ε, �t ) − (kt + 1 − ε) + (1 − δ)(kt − ε)
≥ A∗ F (kt , �t ) − kt + 1 + (1 − δ)kt + ε(δ − A∗ Fk (kt − ε, �t )).
> A∗ F (kt , �t ) − kt + 1 + (1 − δ)kt ,
(21)
where the latter inequality follows from the fact that A∗ Fk (k − ε, �) < δ in the neighborhood W of the steady
state. Consequently, aggregate consumption will be higher for all t ≥ t0: the new path produces more consumption
for the young and/or for the old agents all the time. Notice that an alternative proof would rely on Lemma 1:
we have just shown that there exists a sequence of constant capital stock decrements{εt
} = {ε, ε, · · ·} solving
εt + 1 ≥ Fk (kt − εt , �t )εt , as Fk (k − ε, �) < 1 or A∗ Fk (k − ε, �) < δ around the dynamically inefficient
steady state.
Our task is now to prove that such a neighborhood of the steady state W exists in both cases covered by the
Proposition.
(i) The steady state is a sink: in consequence, one can take W as an open ball centered at (a∗, k∗) with a radius
appropriately chosen; that is, such that W has no intersection with the Golden Rule frontier a = a∗G R .
(ii) The steady state undergoes a subcritical Hopf bifurcation: we know that this may occur only at φ = φH .
Therefore, for all φ ∈ I ≡ (φH − ε, φH ) with some ε > 0 , one can take W as an open ball centered at
(a∗, k∗) and contained in the interior of the unstable Hopf curve surrounding the stable steady state, with
a radius such that W has no intersection with the Golden Rule frontier a = a∗G R .
�PROOF OF PROPOSITION 4: The steady state undergoes a supercritical Hopf bifurcation: we know that this may
occur only at φ = φH . A direct proof of (i) and (ii) follows by applying some results that are due to Cass (1972).
(i) When the Hopf orbit is periodic with period τ , we know from Cass (1972) that the partial criterion contained
in his Theorem 2 turns out to be complete. More precisely, periodic orbits are shown to be inefficient if and
only if∏τ − 1
s = 0 Rs < 1 .
(ii) When the Hopf orbit is quasiperiodic, we may apply Theorem 3 in Cass (1972) to show that orbits are
inefficient if and only if Limt→ + ∞∑t
s = 0
∏s − 1r = 0 Rr < +∞ .
�
292 International Journal of Economic Theory 2 (2006) 279–294 C© IAET

Guido Cazzavillan and Patrick A. Pintus Endogenous business cycles and dynamic inefficiency
References
Azariadis, C. (1993), Intertemporal macroeconomics, Cambridge: Blackwell.
Benhabib, J., and G. Laroque (1988), “On competitive cycles in productive economies,” Journal of Economic
Theory 35, 145–70.
Benveniste, L. (1976), “A complete characterization of efficiency for a general capital accumulation model,”
Journal of Economic Theory 12, 325–37.
Cass, D. (1972), “On capital overaccumulation in the aggregative, neoclassical model of economic growth: A
complete characterization,” Journal of Economic Theory 4, 200–23.
Cass, D., and M. Yaari (1966), “A re-examination of the pure consumption loans model,” Journal of Political
Economy 74, 353–67.
Cazzavillan, G. (2001), “Indeterminacy and endogenous fluctuations with arbitrarily small externalities,” Journal
of Economic Theory 101, 133–57.
Cazzavillan, G., and P. Pintus (2004), “Robustness of multiple equilibria in OLG economies,” Review of Economic
Dynamics 7, 456–75.
Cazzavillan, G., and P. Pintus (2006), “Capital externalities in OLG economies,” Journal of Economic Dynamics
and control 30, 1215–31.
Chattopadhyay, S., and P. Gottardi (1999), “Stochastic OLG models, market structure and optimality,” Journal of
Economic Theory 89, 21–67.
d’Aspremont, C., R. Dos Santos Ferreira, and L.-A. Gerard-Varet (1995), “Market power, coordination failures
and endogenous fluctuations,” H. Dixon, and N. Rankin, eds, The New Macroeconomics: Imperfect Markets
and Policy Effectiveness, 94–138, Cambridge: Cambridge University Press.
de Vilder, R.. (1996), “Complicated endogenous business cycles under gross substitutability,” Journal of Economic
Theory 71, 416–42.
Diamond, P. (1965), “National debt in a neoclassical model,” American Economic Review 55, 1126–50.
Geanakoplos, J., and H. Polemarchakis (1986), “Walrasian indeterminacy and keynesian macroeconomics,”
Review of Economic Studies 103, 755–79.
Grandmont, J.-M. (1993), “Expectations driven nonlinear business cycles,” Rheinisch-Westfalische Akademie des
Wissenschaften 397, 7–32.
Grandmont, J.-M., and G. Laroque (1993), “Stability, expectations and predetermined variables,” P. Champsaur,
M. Deleau, J.-M. Grandmont, R. Guesnerie, C. Henry, J.-J. Laffont, G. Laroque, J. Mairesse, A. Monfort, and
Y. Younes, eds, Essay in honor of Edmond Malinvaud, vol. 1, 56–98, Cambridge: MIT Press.
Grandmont, J.-M., P. Pintus, and R. de Vilder (1998), “Capital-labor substitution and competitive nonlinear
endogenous business cycles,” Journal of Economic Theory 80, 14–59.
Lloyd-Braga, T. (1995), “Increasing returns to scale and nonlinear endogenous fluctuations,” Working Paper 65,
FCEE, Universidade Catolica Portuguesa, Lisbon, Portugal.
Lloyd-Braga, T., C. Nourry, and A. Venditti (2004), “Indeterminacy in dynamic models : When Diamond meets
Ramsey,” GREQAM Working Paper Series 04–52, Marseille, France.
Malinvaud, E. (1953), “Capital accumulation and efficient allocation of resources,” Econometrica 21, 233–68.
Montrucchio, L. (2004), “Cass transversality condition and sequential asset bubbles,” Economic Theory 24,
645–63.
Nourry, C., and A. Venditti (2006), “The overlapping generations model with endogenous labor supply: A general
formulation,” Journal of Optimization Theory and Applications (in press).
Phelps, E. (1965), “Second essay on the golden rule of accumulation,” American Economic Review 55,
783–814.
Pietra, T. (2004), “Sunspots, indeterminacy and Pareto inefficiency in economies with incomplete markets,”
Economic Theory 24, 687–99.
Pintus, P. (1997), “Indeterminacy and expectation-driven fluctuations in aggregate, general economic equilibrium
models,” PhD dissertation, EHESS, Paris, France (in French).
International Journal of Economic Theory 2 (2006) 279–294 C© IAET 293

Endogenous business cycles and dynamic inefficiency Guido Cazzavillan and Patrick A. Pintus
Reichlin, P. (1986), “Equilibrium cycles in an overlapping generations economy with production,” Journal of
Economic Theory 40, 89–102.
Woodford, M. (1984), “Indeterminacy of equilibria in the overlapping generations model: A survey,” mimeo,
Columbia University, New York, NY.
294 International Journal of Economic Theory 2 (2006) 279–294 C© IAET