Embed Size (px)
Citation preview

EL BUQUE DE GUERRA
COMO APLICACIÓN MÁS AVANZADA DE LA TECNOLOGÍA NAVAL
CAPÍTULO IV
SECCIÓN 2
NOCIONES BÁSICAS SOBRE EL COMPORTAMIENTO DEL
BUQUE DE GUERRA EN MAR AGITADA
“Seakeeping is the ability of our ships to go to
sea, and successfully and safely execute their
missions despite adverse environmental factors”.
VAdmiral R.E. Adamson, USN.
ENRIQUE CASANOVA RIVAS

2
Enrique Casanova Rivas
Edita:
FONDO EDITORIAL DE INGENIERÍA NAVAL
COLEGIO OFICIAL DE INGENIEROS NAVALES Y OCEÁNICOS
REALIZACIÓN:
D. G. Gallego y Asociados
ISBN:
Fotografía de portada

3
PRÓLOGO DEL AUTOR
El motivo de haber escrito esta separata es que el contenido del Capítulo IV del
libro es demasiado corto para expresar con cierta claridad una idea de la importancia de
la ciencia del comportamiento de un buque en la mar y especialmente de un buque de
guerra.
A causa de la extensión y profundidad de todos y cada uno de los temas en que
podría dividirse el estudio del comportamiento de un buque en mar agitada, he elegido
los que me han parecido imprescindibles para que los estudiantes de Ingeniería Naval
adquieran una somera idea de la dificultad que requiere la dedicación a resolver los
problemas que siempre se presentarán con el nacimiento de un buque cabeza de serie.
Como se deduce del contenido de este capítulo, es imprescindible disponer de una
amplia base de datos, de programas de ordenador específicos, de un Canal de
Experiencias Hidrodinámicas y de un contacto permanente de colaboración con la
Armada con objeto de recibir datos registrados en buques reales para confirmar o
corregir la base de datos disponible en el centro de estudios.
El contenido de este Capítulo, como ya indiqué anteriormente, está dedicado única
y exclusivamente a los alumnos de Ingeniería Naval, por lo que los temas son sacados
de las publicaciones dadas en la lista de referencias sin apenas valor añadido, pero
expuesto de forma ordenada y asequible para ser comprendido por un estudiante que
haya recibido la formación correspondiente.

4
ÍNDICE
1.- INTRODUCCIÓN
IV.1.- PRÓLOGO 8
IV.2.- RESEÑA HISTÓRICA 8
IV.3.- ALGUNAS DEFINICIONES Y CONCEPTOS APLICABLES 10
2.- LAS OLAS: SU GENERACIÓN Y GEOMETRÍA
IV. 4.- GENERACIÓN DE LAS OLAS 13
IV. 5.- CARACTERÍSTICAS GEOMÉTRICAS DE LAS OLAS 16
IV. 6.- SISTEMAS PARA LA MEDICIÓN DEL OLEAJE 19
3.- INICIACIÓN A LAS TEORÍAS DE OLAS
IV. 7.- ECUACIONES QUE RIGEN LA PROPAGACIÓN DEL OLEAJE 21
IV. 8.- TEORÍA LINEAL DE AIRY 23
IV.8.1.- INTRODUCCIÓN 23
IV.8.2.- PLANTEAMIENTO DE LAS ECUACIONES 23
IV. 8. 3.- SOLUCIÓN DEL SISTEMA DE ECUACIONES 24
IV. 9.- TEORÍA DE STOKES 26
IV. 9. 1.- SOLUCIÓN NO LINEAL DE LA ECUACIÓN
DE OLAS EN FONDO ILIMITADO 26
IV. 9. 2.- SOLUCIÓN NO LINEAL DE LA ECUACIÓN
DE OLAS EN FONDO LIMITADO 27
IV. 10.- TEORÍA DE LA ONDA SOLITARIA 28
IV. 11.- SELECCIÓN DE LA TEORÍA MÁS
ADECUADA A CADA CASO 32
4.- EL OLEAJE IRREGULAR: ANÁLISIS ESPECTRAL
IV. 12.- INTRODUCCIÓN 35
IV. 13.- CARACTERÍSTICAS DEL OLEAJE IRREGULAR 36
IV.14.- ANÁLISIS ESPECTRAL DEL OLEAJE 37
IV.14.1.- COMPOSICIÓN DEL OLEAJE IRREGULAR 37
IV.14.2.- LA ALTURA DE LAS OLAS 41
IV.14.3.- APLICACIÓN DE LA DISTRIBUCIÓN
DE RAYLEIGH AL COMPORTAMIENTO
DEL BUQUE EN OLAS REGULARES 43
IV.15.- EL OLEAJE COMO PROCESO ESTADÍSTICO 46
IV. 15. 1.- PROCESO ESTOCÁSTICO 47
IV. 15. 2.- PROCESO ESTACIONARIO 48
IV. 15. 3.- PROCESO ERGÓDICO 48
IV. 16.- EL OLEAJE COMO PROCESO ESTOCÁSTICO 48
IV. 17.- MODELO ESPECTRAL DEL OLEAJE 51

5
IV. 18.- ANCHO DE BANDA DE UN ESPECTRO 55
IV. 19.- PREDICCIÓN DE MAR IRREGULAR 56
5.- EVOLUCIÓN DE LAS FÓRMULAS QUE
CARACTERIZAN LOS ESPECTROS DE LA MAR
IV.20.- INTRODUCCIÓN 60
IV.21.- ESPECTROS DE ENERGÍA DEL OLEAJE 60
IV.22- ESPECTROS DE ENERGÍA DEL OLEAJE
DEL TIPO 𝑺 = 𝑺(�̅�𝒛, 𝑭, 𝒇) 62
IV.22.1.- EL ESPECTRO BRETSCHNEIDER 62
IV.22.2.- EL ESPECTRO JONSWAP 63
IV. 23.- ESPECTROS DE ENERGÍA DEL OLEAJE
DEL TIPO 𝑺 = 𝑺(𝒇, �̅�𝒛) 64
IV.23.1.-ESPECTRO PIERSON-MOSKOWITZ 65
IV.23.2.-EL ESPECTRO NEUMANN 66
IV.23.3.-EL ESPECTRO ROLL-FISHER 67
IV.24.- DIFUSIÓN DE LAS OLAS 67
IV.25.- UTILIZACIÓN DE LAS ECUACIONES DE LOS ESPECTROS 69
IV.25.1.- DETERMINACIÓN DE LA ALTURA DE LA
OLA SIGNIFICANTE EN FUNCIÓN DE �̅�𝒛 = �̅�𝟏𝟎 69
IV. 25. 2.- PERIODO ÓPTIMO Tópt DEL ESPECTRO PARA O. T. D. 70
IV.26.- EXPRESIÓN GENERALIZADA DEL ESPECTRO DE O.T.D. 70
IV.27.- COMPARACIÓN GRÁFICA DE LOS ESPECTROS 70
IV.28.- COMPARACIÓN DE LOS ESPECTROS
EN FUNCIÓN DE 𝑯𝒔 Y 𝑻𝒔 73
IV.29.- COMPARACIÓN ENTRE VALORES CALCULADOS
Y VALORES OBSERVADOS DE 𝑯𝒔 Y 𝑻ó𝒑𝒕 75
IV. 30.- ESPECTROS DE ENERGÍA DE OLEAJES PARCIALMENTE
DESARROLLADOS (O. P. D.) 76
IV.31.- ELECCIÓN DEL ESPECTRO MÁS ADECUADO 77
6.- ESTADÍSTICA DE LOS OCÉANOS
IV.32.- ESTIMACIÓN VISUAL DEL OLEAJE 78
IV.33.- ATLAS DE LAS OLAS (GWS) 81
7.- ANÁLISIS DEL COMPORTAMIENTO DEL BUQUE EN
MAR AGITADA
IV. 34.- DEFINICIÓN 85
IV.35.- TEORÍA LINEAL CLÁSICA DEL COMPORTAMIENTO
DEL BUQUE EN LA MAR 86
IV.36.- EFECTOS DE LAS OLAS SOBRE EL BUQUE 87
IV.37.- FRECUENCIA DE ENCUENTRO 88
IV.38.- ESTUDIO DE LOS MOVIMIENTOS DEL BUQUE
EN OLAS REGULARES 93

6
IV.39.- ECUACIONES LINEALES PARA MOVIMIENTOS DEL BUQUE
DE PEQUEÑA AMPLITUD EN OLAS REGULARES 94
IV.39.1.- INTRODUCCIÓN 94
IV.39.2.- DEFINICIÓN DE LOS EJES Y DE LOS
MOVIMIENTOS DEL BUQUE 94
IV.39.3.- POSICIÓN SOBRE LA OLA 96
IV.39.4.-MASAS Y MOMENTOS DE INERCIA 96
IV.39.5.- ECUACIONES GENERALES LINEALES 97
IV.39.6.- CRITERIOS DE COMPORTAMIENTO 98
IV. 40.- BREVE DESCRIPCIÓN DE LA TEORÍA
DE REBANADAS (STRIP THEORY) 99
IV.41.- FUNCIONES DE TRANSFERENCIA 102
IV. 42.- OPERADORES DE AMPLITUD DE RESPUESTA (RAO) 103
8.-MOVIMIENTOS DEL BUQUE EN MAR IRREGULAR IV. 43.- INTRODUCCIÓN 104
IV.44.- MOVIMIENTOS DEL BUQUE EN MAR IRREGULAR 105
IV.44.1.- ELECCIÓN DEL ESPECTRO DE OLA Y
TRANSFORMACIÓN EN FUNCIÓN DE
LA FRECUENCIA DE ENCUENTRO 105
IV.44.2.- OBTENCIÓN DE LA ALTURA DE LA OLA
SIGNIFICANTE EN FUNCIÓN DE LA
FRECUENCIA DE ENCUENTRO 107
IV.44.3.- DETERMINACIÓN DE LOS MOVIMIENTOS DEL BUQUE 108
IV.45.- FENÓMENOS ASOCIADOS A LOS
MOVIMIENTOS EN MAR AGITADA 109
IV.45.1.- RESISTENCIA AÑADIDA POR OLAS QUE
AFECTAN A LA VELOCIDAD SOSTENIDA DEL BUQUE 109
IV.45.2.- EL SLAMMING, LA EMERSIÓN DEL PROPULSOR
Y EL EMBARQUE DE AGUA 111
9.- CRITERIOS DE OPERATIVIDAD DEL BUQUE DE
GUERRA EN OLAS
IV.46.- VÍAS PARA EL ESTUDIO DEL COMPORTAMIENTO
DEL BUQUE DE GUERRA EN LA MAR 113
IV.47.- ALGUNAS EXIGENCIAS DE LAS ESPECIFICACIONES
DE CONTRATO 115
IV. 48.- PREDICCIÓN DEL COMPORTAMIENTO EN LA MAR
DURANTE LAS PRIMERAS FASES DEL PROYECTO 118
IV. 49.- EL FACTOR DE MÉRITO DE BALES 119
IV. 50.- LA EFICACIA OPERATIVA 122
IV. 50.1.- VARIACIONES GEOGRÁFICAS Y ESTACIONALES 124
IV. 50. 2.- DIRECCIÓN DE LA OLA PRINCIPAL 126
IV. 50.3.-ALTURA Y PERIODO DE LA OLA SIGNIFICANTE 126
IV. 50.4.- RUMBO Y VELOCIDAD DEL BUQUE 126
IV.50.5.- CÁLCULO DE LA EFICACIA OPERATIVA 127

7
IV.51.- EL ÍDICE DE OPERATIVIDAD 128
IV. 52.- LOS ÍNDICES DE LA CAPACIDAD PARA EJECUTAR
LAS MISIONES ASIGNADAS,
(SPI, SEAKEEPING PERFORMANCE INDEX) 128
IV. 53.- ANÁLISIS DE LA CAPACIDAD DEL BUQUE
PARA EJECUTAR LAS MISIONES ASIGNADAS 129
IV. 53.1.- CASO DE BUQUES EN GENERAL 129
IV.53.2.- CASO DE BUQUES DE GUERRA 133
IV.53.3.- ANÁLISIS DE LOS REQUERIMIENTOS 134
IV.54.- DESCRIPCIÓN DEL AMBIENTE MARINO 135
IV.55.- CRITERIOS PARA VALORAR LA CAPACIDAD
PARA EJECUTAR LAS MISIONES ASIGNADAS 136
IV.56.-PREDICCIÓN DE LA RESPUESTA DEL BUQUE 137
IV.57.- EVALUACIÓN GRÁFICA DE LA CAPACIDAD
PARA EJECUTAR LAS MISIONES ASIGNADAS 138
IV.58.- LÍMITES DE LA OPERATIVIDAD DEL BUQUE 140
IV. 59.- INVESTIGACIÓN PARA EVALUAR EL COMPORTAMIENTO
EN LA MAR DE FRAGATAS Y DESTRUCTORES 140
IV. 59. 1.- PROCEDIMIENTO SEGUIDO EN LA INVESTIGACIÓN 142
IV. 59. 2.- TRAZADO DE LAS CURVAS ENVOLVENTES 144
IV. 59. 3.- PRESENTACIÓN DE RESULTADOS 144
IV.59. 4.- INTERPRETACIONES DE LOS RESULTADOS 146
IV. 59. 5.- CONCLUSIONES 148
10.- APLICACIÓN DEL ORDENADOR PARA EL
ANÁLISIS DEL COMPORTAMIENTO EN LA MAR
IV. 60.- PROGRAMAS DE ORDENADOR PARA EL ANÁLISIS
DEL COMPORTAMIENTO EN LA MAR
DE BUQUES DE GUERRA 149
IV. 61.- ESTRUCTURA DE UN PROGRAMA PARA EL ANÁLISIS
DEL COMPORTAMIENTO DEL BUQUE EN LA MAR 149
IV. 61. 1.- CARACTERÍSTICAS PRINCIPALES DEL BUQUE 150
IV. 61. 2.- CONDICIONES DE LA MAR 150
IV. 61. 3.- REQUERIMIENTOS OPERATIVOS 150
IV. 61. 4.- CRITERIOS 150
IV. 61. 5.- OTROS REQUERIMIENTOS 151
IV. 61. 6.- INFORME DEL RESULTADO DEL ANÁLISIS 151
IV.62.- ESQUEMA DE UN PROYECTO DE INVESTIGACIÓN
APLICADO A DESTRUCTORES, FRAGATAS Y SWATH 152
REFERENCIAS 157
ÍNDICE ALFABÉTICO 159

8
1.- INTRODUCCIÓN
IV.1.- PRÓLOGO
El contenido de este capítulo pretende ser el punto de partida de las nociones
básicas necesarias que faciliten el progreso a través de un laborioso camino hacia la
comprensión del comportamiento del buque en la mar. Por ello, es necesario puntualizar
que la pretensión de llevar a cabo en unos párrafos de este capítulo una exposición que
abarque todos los temas de que se compone el Comportamiento del Buque en la Mar,
no solo sería una temeridad sino que además es imposible. Basta echar un vistazo a la
copiosa bibliografía existente compuesta de extensos trabajos publicados, y los que se
siguen publicando, sobre los diversos temas que comprende esta disciplina.
El análisis del Comportamiento del Buque en la Mar se basó durante siglos en el
conocimiento práctico de los marinos por lo que no alcanzó la categoría de Ciencia
hasta que un grupo de sabios como Jorge Juan, Froude, Krylov, Euler y otros muchos
aplicaron a aquella base práctica herramientas como Matemáticas, Física,
Hidrodinámica, etc., con el nivel disponible en cada momento. El progreso definitivo lo
proporcionó posteriormente la reproducción a escala de las carenas de buques y su
ensayo en los Canales de Experiencias Hidrodinámicas con la aportación definitiva de la
Estadística y de los potentes Ordenadores.
Con el fin de facilitar el futuro estudio en profundidad de este prolijo tema hemos
tratado de hacer una división conceptual, dividiendo el contenido del presente capítulo
en los siguientes apartados:
1. Introducción
2. Las olas: su generación y geometría
3. Iniciación a las teorías de olas
4. El oleaje irregular: análisis espectral
5. Evolución de las fórmulas que caracterizan los espectros de la mar
6. Estadística de los océanos
7. Análisis del comportamiento del buque en mar agitada
8. Movimientos del buque en mar irregular
9. Criterios de operatividad del buque de guerra en olas
10. Aplicación del ordenador para el análisis del comportamiento en la mar
IV.2.- RESEÑA HISTÓRICA
En general, la preocupación por conseguir que los artefactos flotantes, no solo
pudieran sobrevivir a los temporales, sino también que sus tripulantes no fueran
barridos de sus cubiertas por las olas y no sufrieran los efectos devastadores del mareo,
debió nacer al mismo tiempo que la navegación. Además, en lo que respecta al
primitivo buque de guerra, ha sido necesario mejorar sus cualidades marineras y
adaptarlas a la necesidad de evolucionar con mayor rapidez y seguridad que el
enemigo, para que sus dotaciones alcanzasen cuanto antes sus objetivos.
Las primeras aplicaciones de la Ciencia al estudio del comportamiento del buque en
la mar se realizaron a mediados del siglo XVIII cuando Jorge Juan, como hombre de la
Ilustración (fue quien introdujo la profesión de Ingeniero Naval en España), extendió su

9
sabiduría a numerosos campos, entre ellos el naval, desarrollado en su libro Examen
Marítimo en el que demuestra que sus conocimientos son comparables a los de otros
eminentes sabios de la época como Euler, autor del trabajo titulado Scientia Navalis.
Ambos sentaron las bases para los futuros estudios del comportamiento del buque en la
mar basando los cálculos en las leyes de Newton y en las de Bernoulli sobre Mecánica
de Fluidos.
Aproximadamente un siglo después surgen los investigadores que construyeron la
base sólida sobre la que se edifica la rama actual de la ciencia del Comportamiento del
Buque en la Mar. Como ejemplos significativos cabe nombrar los siguientes: W. Froude
en 1861 publica su trabajo On the Rolling of Ships en el que desarrolla un completo
análisis de los movimientos de balance de un buque con olas de través. A. N. Krylov en
1896, presentó su estudio A New Theory of the Pitching Motion of Ships on Waves and
of the Stresess Produced by this Motion en el que se trata por primera vez el problema
del cabeceo del buque en mar gruesa.
Tanto Froude como Krylov se basaron en el supuesto de que la presencia del buque
no modifica el campo de presiones de las olas incidentes, por lo que un alto porcentaje
de las fuerzas sobre el buque se pueden obtener integrando a través de su superficie
mojada el campo de presiones de la ola sin modificar. Esta hipótesis se denominó la del
“buque fantasma”.
La hipótesis de Froude-Krylov, conserva dicha denominación dual en el moderno
estudio analítico del movimiento de los buques, cuando se habla de las solicitaciones
aplicadas por las olas.
Durante la primera mitad del siglo XX se centró el estudio de numerosos
investigadores en el cálculo de los coeficientes hidrodinámicos para introducir la masa
de agua añadida y la amortiguación de las oscilaciones de cuerpos bidimensionales y
tridimensionales. El progreso se afianzó en dos frentes principales: la comprensión de
los fenómenos hidrodinámicos básicos y la obtención de soluciones exactas para los
problemas más simples.
El año 1950 marca un hito en la breve historia del comportamiento del buque en la
mar, ya que G. Weinblum y M. St. Denis publicaron su trabajo On the Motions of Ships
at Sea en el que llevaron a cabo una revisión en profundidad de la teoría de los
movimientos del buque en olas regulares, aplicando las leyes de Newton. Trataban al
buque como un cuerpo rígido, planteando ecuaciones en función de la frecuencia de
oscilación como si se tratase de un movimiento armónico forzado y amortiguado.
A partir de aquí, dentro de aquella misma década, se sucedieron grandes logros en
el campo de la teoría del movimiento del buque que se pueden resumir en dos áreas
principales:
La primera se inició con el desarrollo por W. Pierson en 1952, de un modelo
estadístico adecuado para olas irregulares, completado al año siguiente con el
estudio entre Pierson y St. Denis (On the Motion of Ships in Confused Seas) en el
que se demostraba la posibilidad de interconexión del modelo estadístico de
Pierson y la de un modelo similar para los movimientos de un buque en aquellas
olas. La aportación fundamental de Pierson y St. Denis fue la de considerar la

10
superficie libre de la mar como un proceso aleatorio gaussiano de segundo orden,
con lo que consiguieron la compatibilidad con las leyes de la hidrodinámica clásica.
Gracias a ello fue posible aplicar el principio de superposición, el cual supone que
la superficie de la mar está formada por la suma de muchas olas sinusoidales de
distintas amplitudes, frecuencias y direcciones, pero cada una de ellas
independiente de las demás y con un desfase aleatorio y equiprobable (Modelo de
Longuet-Higgins).
Por otra parte, la compatibilidad entre la hidrodinámica y la teoría de procesos
aleatorios gaussianos y ergódicos permite resolver el problema en el dominio de la
frecuencia y así obtener resultados útiles desde un punto de vista práctico.
La segunda se basó en el desarrollo de la Intuitive Strip Theory por Korvin-
Kroukovsky y Jacobs que permitió, entre otras, el cálculo de las fuerzas
hidrodinámicas que intervienen en la determinación de los movimientos del buque,
lo cual presentaba anteriormente serias dificultades. La aplicación de esta teoría
permitió predecir resultados con suficiente exactitud, de forma que sirvió de
estímulo para desarrollar durante los años siguientes teorías más rigurosas.
En 1980 J. N. Newman y P. Sclavounos presentaron resultados de cálculos
obtenidos por un método basado en la Unified Strip Theory desarrollada por J. N.
Newman, cuyos cálculos comparados con los resultados realizados con modelos en
Canales de Experiencias Hidrodinámicas, demostraron una mayor aproximación que la
obtenida con la versión de Korvin-Kroukovsky.
Principalmente entre los años 50 y los 80 del pasado siglo XX predominó el cálculo
lineal basado en la teoría lineal clásica del Comportamiento del Buque en la Mar la
cual, como más adelante veremos, se apoya en ciertas hipótesis fundamentales.
Es importante destacar la aportación de las ITTC (International Towing Tank
Conferences). ITTC es una asociación voluntaria de organizaciones en todo el mundo,
cuya responsabilidad es la predicción del comportamiento hidrodinámico de los buques
e instalaciones marinas basadas en los resultados de la modelización física y numérica.
IV.3.- ALGUNAS DEFINICIONES Y CONCEPTOS APLICABLES
Para poder afrontar el estudio del comportamiento de un buque en la mar, es
imprescindible recordar definiciones y conceptos que le son directamente aplicables:
Supervivencia (Seaworthiness), es la posibilidad de sobrevivir de un buque de
guerra en condiciones de mar extremas.
Capacidad para comportamiento en la mar (Seakeeping performance), es la
posibilidad de un buque de guerra de ejecutar sus misiones en la mar, es decir,
para llevar a cabo o cumplir una acción, objetivo o función. Una buena capacidad
significa que el buque es muy marinero y, por lo tanto, capaz de desempeñar sus
misiones de forma eficaz incluso en estados de la mar adversos (seakeeping
ability).
Se denomina Comportamiento del Buque en la Mar (Seakeeping), a la ciencia
aplicada que estudia la interacción entre el buque y la mar. En otras palabras, la

11
metodología que tiene por objeto el estudio de los movimientos del buque y el de
los esfuerzos producidos en él por las olas.
Espectro de densidad de energía de la mar o espectro de ola es la distribución de
la energía total de la mar en función de las frecuencias ω de los diversos
componentes de la ola. En coordenadas cartesianas, las energías se sitúan en
ordenadas y las frecuencias en abscisas.
Sistemas Estocásticos o Aleatorios son aquellos en que los estados futuros no
están determinados por los previos.
Sistema Probabilístico es aquel para el cual no se puede facilitar una previsión
detallada. Por ejemplo, el comportamiento de un animal ante una presa: puede
aproximarse, puede no interesarle o puede retirarse.
Un Proceso Ergódico se define como aquel proceso donde los promedios
estadísticos son iguales a los temporales.
Un Sistema Ergódico es el que tiene las mismas características estadísticas si se
observa en un punto durante un largo tiempo que si se observa en un instante sobre
un área larga.
La Teoría Ergódica se dedica principalmente al estudio matemático del
comportamiento promedio de largo plazo, es decir, a los sistemas dinámicos,
entendiendo como sistema dinámico a un sistema físico cuyo estado evoluciona
con el tiempo.
El Determinismo, es una doctrina filosófica. Sostiene que todo acontecimiento
físico está causalmente determinado (la causalidad describe la relación entre
causas y efectos. La causalidad se puede estudiar desde la perspectiva estadística).
Laplace afirmó que si se conoce el estado actual del mundo con total precisión se
podrá predecir cualquier evento del futuro. Esta perspectiva se conoce como
Determinismo Causal.
Sistema Determinista es en el que el azar no está involucrado en el
desenvolvimiento de los futuros estados del Sistema.
Modelo Determinista es el que producirá siempre la misma salida a partir de las
mismas condiciones de partida o Estado Inicial.
Densidad Espectral, (Spectral Density) de una señal es una función matemática
que informa de cómo está distribuida la potencia o la energía (según el caso) de
dicha señal en función de las distintas frecuencias de las que está formada, es
decir, su espectro.
La definición matemática de la Densidad Espectral es diferente dependiendo de si
se trata de señales definidas en energía, en cuyo caso hablamos de Densidad
Espectral de Energía, o en potencia, en cuyo caso hablamos de Densidad
Espectral de Potencia.
Estimación de la densidad espectral de potencia.- Un problema muy común y con
grandes aplicaciones prácticas en el procesado de señales, es el de estimar la
densidad espectral de potencia de una señal aleatoria estacionaria.
Se dice estimar y no determinar puesto que, como la señal es un proceso
estocástico (estacionario) no es posible determinar con absoluta precisión su DEP a
no ser que dispongamos de un registro infinito de señales, lo cual no es posible.
Las técnicas de estimación se dividen en dos grandes grupos:
No paramétricas. Están basadas siempre, de una u otra forma, en el cálculo del
periodograma. Por ejemplo, el cálculo de la Transformada de Fourier de un

12
registro de señal para estimar su espectro, es un ejemplo de aplicación de la técnica
no paramétrica.
Paramétricas. Consisten en suponer un determinado modelo para el proceso
estocástico (modelos AR, MA, ARMA, etc.) y en la estimación de los parámetros de
estos modelos mediante técnicas de predicción lineal (filtrado lineal óptimo) u
otros métodos.
Acerca de los procesos estocásticos no estacionarios.- La Densidad Espectral
sólo está matemáticamente bien definida en el caso de señales con una función de
autocorrelación estacionaria, es decir, que no dependa de la posición de las
variables aleatorias que componen el proceso sino sólo de la distancia entre ellas.
Por lo tanto, la Densidad Espectral sólo está bien definida para el caso de señales
deterministas y señales aleatorias estacionarias. En otras palabras, el proceso nunca
será estacionario, pero a efectos prácticos tenemos que suponer que lo es.
Un proceso aleatorio no estacionario que es estacionario a trozos se llama
cuasi-estacionario y es posible definir la Densidad Espectral de Potencia en cada
uno de estos trozos. Para estimar la Densidad Espectral de Potencia en este tipo de
procesos lo normal es usar un método de estimación espectral paramétrico
adaptativo (por ejemplo, mediante un modelo AR y el algoritmo LMS para
identificar el modelo AR).
En teoría de probabilidad, la varianza (que suele representarse como 𝜎2) de
una variable aleatoria es una medida de dispersión definida como la esperanza del
cuadrado de la desviación de dicha variable respecto a su media.
Está medida en unidades distintas de las de la variable. Por ejemplo, si la
variable mide una distancia en metros, la varianza se expresa en metros al
cuadrado. La desviación estándar es la raíz cuadrada de la varianza, es decir, una
medida de dispersión alternativa expresada en las mismas unidades que la variable
objeto de estudio. La varianza tiene como valor mínimo 0.
En el estudio del comportamiento del buque en la mar (seakeeping) se suele
usar el valor RMS erróneamente ya que no considera la media. Es más exacto usar
en lugar del RMS, la desviación estándar.

13
2.- LAS OLAS: SU GENERACIÓN Y GEOMETRÍA
IV. 4.- GENERACIÓN DE LAS OLAS
Más adelante se expondrán las características de las olas regulares cuyo
conocimiento es imprescindible para el Ingeniero Naval y Oceánico. Sin embargo, las
olas reales que se producen en los mares nunca son regulares. De ellas las que centran
la atención de los técnicos son las producidas por acción de los vientos en la
naturaleza. Aquellas otras como las que se generan y propagan por acción de otras
fuerzas perturbadoras como las mareas (posición relativa de la Tierra respecto a la Luna
y al Sol), las corrientes marinas y el movimiento de las placas tectónicas (generación de
tsunamis) son de poca importancia práctica salvo en circunstancias especiales.
Si el viento continúa soplando durante un largo tiempo y sobre una longitud de
agua o fetch suficiente, los rizos avanzarán y crecerán en longitud y altura hasta que se
conviertan en olas propiamente dichas: son olas SEA de cresta corta. Su dirección de
propagación será más o menos la misma que la del viento generador. Al mismo tiempo,
el viento genera nuevos rizos sobre la superficie de las olas crecientes y estos rizos se
convertirán a su vez en olas (Figura 1.IV). Este proceso es continuo y las olas
observadas en un determinado punto y momento consistirán en una mezcla de de
longitudes y alturas de olas superpuestas entre sí.
Figura 1.IV
El oleaje de viento, es tan variable que hace que su estudio no sea trivial. Las olas,
se generan absorbiendo energía del viento. Esta absorción de energía es contrarrestada
por dos mecanismos principales: la rotura de la ola y la viscosidad. Si el viento
continúa soplando a velocidad constante durante un largo tiempo con suficiente fetch, la
velocidad de absorción de la energía por las olas estará exactamente equilibrada por la
velocidad de disipación de la energía por lo que se llegará a un estado estacionario de
un sistema de olas totalmente desarrolladas. Tales sistemas de olas son raros ya que las
condiciones estacionarias requeridas no persisten durante un tiempo suficiente.
Si el viento cesa, el sistema de olas creado disminuirá a medida que se disipa la
energía. La rotura de la ola es un poderoso mecanismo de debilitación y las olas cortas
puntiagudas son las que tienden a romperse en primer lugar; posteriormente, las olas

14
más largas se disiparán por las relativamente débiles fuerzas de viscosidad. Este
proceso de debilitación puede durar varios días durante los cuales las olas largas o
SWELLS se mueven y pueden viajar varios miles de kilómetros. Estas olas son
generalmente de largo periodo y comparativamente regulares. Por eso, las olas
generadas en un determinado lugar se pueden alterar por SWELLS generadas en
cualquier otro punto del océano.
Como resumen de lo anterior se puede decir que el oleaje SEA es caótico ya que no
cuenta con un periodo y altura bien definidos. Las olas se propagan en todas direcciones
pero su principal orientación depende del viento que las genera. A la longitud de la
superficie sobre la que actúa el viento, se denomina fetch.
En el oleaje SWELL las olas se mantienen alineadas con crestas y senos bien
definidos y existe una dirección de propagación predominante. Esta mar de fondo se
traslada a grandes distancias a expensas de su propia energía. Las olas tienen elevados
periodos y son las que más se asemejan a olas regulares.
Por lo tanto, al tratar de medir el oleaje hay que tener en cuenta que el estado de la
mar suele estar compuesto por olas con diferentes periodos, amplitudes y direcciones..
En la figura 2.IV se representa el esquema de la distribución de energía de las olas
marinas según Kinsman, quién clasificó las olas por su periodo. La distribución de
energía oscilatoria se manifiesta con un rango del periodo que va desde las 12 horas
hasta medio segundo. Una parte importante de esta energía se localiza en la banda de
0,5 a 30 s, la corresponde al oleaje de viento.
Figura 2.IV
La figura 3.IV muestra la acción de un viento constante sobre una determinada zona
de la mar en la que se observa la formación caótica de las olas SEA sus direcciones de
propagación y finalmente los trenes de olas que constituyen la mar de fondo, SWELL, o
mar tendida.

15
Figura 3.IV
Aunque sople un viento huracanado sobre un estanque, no conseguirá formar
grandes olas porque el fetch es muy pequeño. A mayor fetch, por tanto, mayores olas,
pero hasta ciertos límites, pues una vez alcanzado el tamaño máximo de la ola para una
fuerza de viento determinada, esta permanecerá en su máximo sin crecer más. Se
constituye un estado estacionario denominado estado de la mar en un sistema de olas
totalmente desarrollado.
En una borrasca el fetch de un lugar se extiende por la zona donde sopla el viento,
como en el ejemplo de la figura 4.IV, en la que se señala el fetch que influirá en el
estado de la mar procedente del NW en el Canal del Norte entre las Islas Británicas.
Figura 4.IV
Como se desprende de todo lo anterior el estado real de una mar agitada es muy
complicado. Basta imaginar que ya se ha levantado la máxima mar y las olas comienzan
a viajar durante cientos de kilómetros. En una zona muy lejana soplará otro viento de
otra magnitud y con otra dirección. Entonces en esta nueva zona se levantarán otras olas

16
de otro tamaño y con otro rumbo de propagación. A estas nuevas olas les podrán llegar
sucesivamente las generadas en otros lugares. La suma de todos los tipos de olas será el
Estado de la MarLocal. En definitiva, el estado final será la suma de los diferentes
frentes de olas formados en diversas zonas del océano, cada una de ellas con sus
características propias.
IV. 5.- CARACTERÍSTICAS GEOMÉTRICAS DE LAS OLAS
El primer paso para el estudio del comportamiento del buque en la mar, es el
conocimiento de las características geométricas de las olas, las cuales se diferencian
entre sí por un rango de periodos y de longitudes de onda concretos. Estos valores se
pueden limitar a periodos (T) comprendidos entre un segundo y menos de 4 minutos y
a longitudes de onda (λ) entre 1,5 m y 80 km, respectivamente. En cuanto a las alturas
de las olas, que se definen como la distancia en vertical entre la cresta y el seno de la
ola, también existe un amplio rango de valores que puede variar de menos de un metro
en los casos de calmas o brisas suaves, hasta las olas provocadas por temporales
huracanados donde alcanzan valores de 14 o más metros de altura. Con respecto a la
profundidad h, se consideran aguas poco profundas o muy profundas en función de la
longitud de onda. Para una ola dada, la profundidad es poca cuando es menor de la
mitad de la longitud de ola.
Seis son los parámetros o variables que caracterizan las olas (figura 5.IV). De ellos
tres son variables independientes y hay que medirlos directamente. Los otros pueden
deducirse de estos tres. Los parámetros a medir directamente son:
Altura �̅�𝒂: Valor medio de muchas medidas de la distancia vertical entre una cresta
y un seno consecutivos (esta medida siempre es positiva).
Período �̅�𝒑 : Periodo medio de los picos. Valor medio de muchas medidas del
tiempo que transcurre entre el paso de dos crestas (o dos senos) consecutivos por un
mismo lugar (por ejemplo, el ocupado por un objeto flotante sin velocidad propia).
Longitud de onda λ: En olas regulares, es la distancia entre dos crestas
consecutivas.
�̅�𝒛 : Valor medio de muchas medidas del tiempo entre dos cruces por cero
sucesivos, hacia arriba o hacia abajo
Los principales parámetros que se deducen son:
Número de onda k: Es el cociente de dividir 2π por la longitud de onda λ.
Amplitud, ζa de la ondulación, Es la distancia vertical desde el nivel medio del
agua hasta un pico o un seno. Puede ser positiva o negativa. En olas regulares es la
mitad de la altura (ζa = Ha /2).
Celeridad c: Se denomina celeridad, c, a la velocidad aparente con la que se
mueven las crestas. Su valor, en olas regulares, es 𝑐 = 𝜆𝑇⁄ . La ecuación de
dispersión de Airy relaciona la celeridad con la profundidad y la longitud de onda
mediante la siguiente expresión:
𝑐 = √𝑔𝜆
2𝜋𝑡𝑎𝑛ℎ
2𝜋ℎ
𝜆 , o también 𝑐 =
𝑔𝑇
2𝜋𝑡𝑎𝑛ℎ
2𝜋ℎ
𝜆 (1)

17
De donde se deduce que la ola viaja más rápido cuanto mayor es su periodo.
Figura 5.IV
Pendiente de ola regular: Es el cociente de dividir la altura por la longitud de
onda (휀 = 𝐻𝑎
𝜆)
Atendiendo a la pendiente se puede establecer la siguiente clasificación de olas:
Olas pequeñas: si Ha/λ< 1/100
Olas moderadas: si 1/100 < Ha/λ< 1/25
Olas grandes: si 1/25 < Ha/λ< 1/7
Dispersión de las olas: El concepto de dispersión implica que las olas se separan
en su propagación hacia la costa, ordenándose por sus periodos.
Altura de la ola significante, �̅�𝟏/𝟑(o �̅�𝒔).-Se define como el valor medio del tercio
de las olas de mayor altura del registro. Es uno de los parámetros más
representativos del oleaje. La altura significante representa la altura de las olas que
un observador experimentado apreciaría a simple vista en el punto de medida (no
desde la costa), que equivale aproximadamente a la altura media del tercio de olas
más altas.
Aunque esta definición pueda parecer algo complicada, es debido a que por propia
naturaleza el observador tiende a poner más atención a las olas mayores, de tal manera
que cuando reporta la altura de las olas, normalmente esta altura es coincidente con la
altura significante.
�̅�1/3 =∑𝑑𝑒1 3⁄ 𝑑𝑒 𝑜𝑙𝑎𝑠 𝑑𝑒 𝐻𝑖
13⁄ 𝑑𝑒𝑙 𝑛ú𝑚𝑒𝑟𝑜 𝑑𝑒 𝑜𝑙𝑎𝑠 𝑟𝑒𝑔𝑖𝑠𝑡𝑟𝑎𝑑𝑎𝑠
(2)
donde 𝐻𝑖 son las alturas de las olas del registro, ordenadas de mayor a menor y N es el
número total de olas de cada registro.
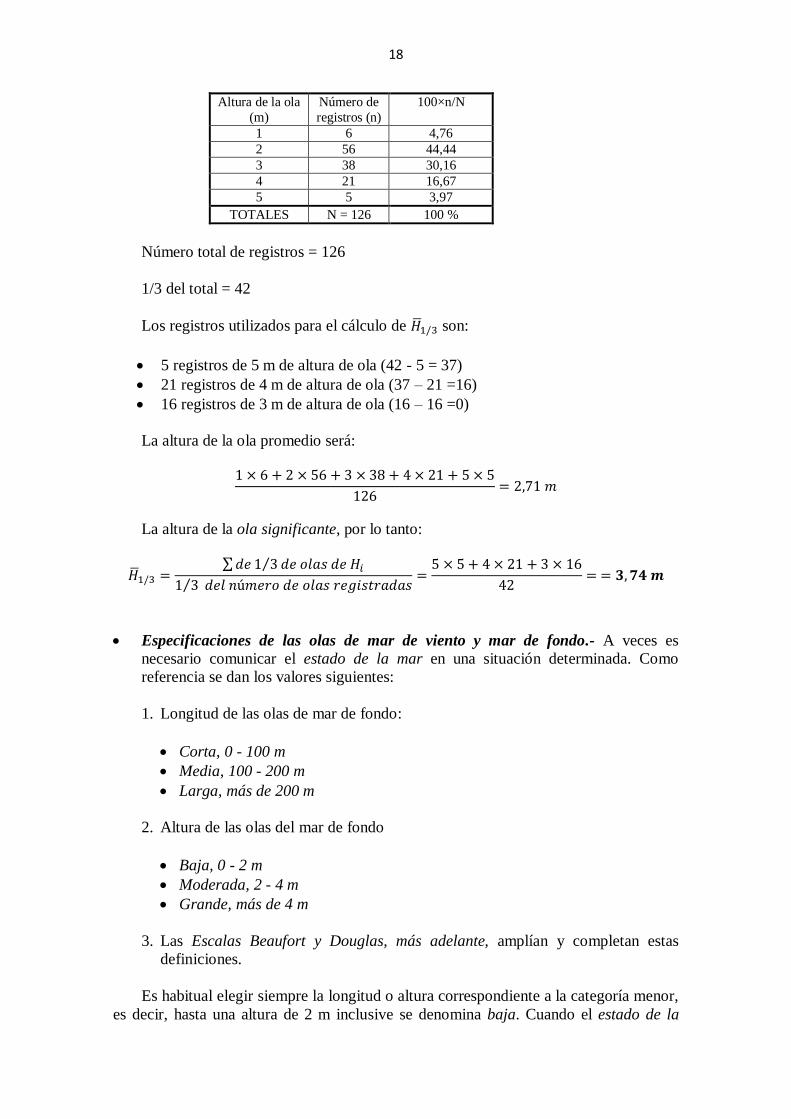
Por ejemplo, para determinar la altura de la ola significante correspondiente a los
siguientes registros:
18
Altura de la ola
(m)
Número de
registros (n)
100×n/N
1 6 4,76
2 56 44,44
3 38 30,16
4 21 16,67
5 5 3,97
TOTALES N = 126 100 %
Número total de registros = 126
1/3 del total = 42
Los registros utilizados para el cálculo de �̅�1/3 son:
5 registros de 5 m de altura de ola (42 - 5 = 37)
21 registros de 4 m de altura de ola (37 – 21 =16)
16 registros de 3 m de altura de ola (16 – 16 =0)
La altura de la ola promedio será:
1 × 6 + 2 × 56 + 3 × 38 + 4 × 21 + 5 × 5
126= 2,71 𝑚
La altura de la ola significante, por lo tanto:
�̅�1/3 =∑𝑑𝑒 1 3⁄ 𝑑𝑒 𝑜𝑙𝑎𝑠 𝑑𝑒 𝐻𝑖
1 3⁄ 𝑑𝑒𝑙 𝑛ú𝑚𝑒𝑟𝑜 𝑑𝑒 𝑜𝑙𝑎𝑠 𝑟𝑒𝑔𝑖𝑠𝑡𝑟𝑎𝑑𝑎𝑠=
5 × 5 + 4 × 21 + 3 × 16
42= = 𝟑,𝟕𝟒 𝒎
Especificaciones de las olas de mar de viento y mar de fondo.- A veces es
necesario comunicar el estado de la mar en una situación determinada. Como
referencia se dan los valores siguientes:
1. Longitud de las olas de mar de fondo:
Corta, 0 - 100 m
Media, 100 - 200 m
Larga, más de 200 m
2. Altura de las olas del mar de fondo
Baja, 0 - 2 m
Moderada, 2 - 4 m
Grande, más de 4 m
3. Las Escalas Beaufort y Douglas, más adelante, amplían y completan estas
definiciones.
Es habitual elegir siempre la longitud o altura correspondiente a la categoría menor,
es decir, hasta una altura de 2 m inclusive se denomina baja. Cuando el estado de la

19
mar no se considera adecuado a ninguno de los términos descritos arriba se utilizará el
término de mar confusa.
IV. 6.- SISTEMAS PARA LA MEDICIÓN DEL OLEAJE
Al ser el oleaje un fenómeno estocástico la medida de las olas requiere obtener
muestras durante un período de tiempo suficientemente largo para llegar a representar
un estado de la mar. Como regla general, es conveniente registrar 100 ciclos de las olas
más largas esperables. Por lo que si se trata de periodos de ola de 10 segundos, se debe
planificar un muestreo durante 1.000 s. El resultado es una serie temporal de medidas
que es necesario procesar con objeto de caracterizar el estado de la mar con precisión.
Los parámetros utilizados para describir el estado de la mar son: la altura de ola, el
periodo y la dirección del oleaje, los cuales son valores representativos de las series
temporales registradas.
El método más simple para estimar parámetros del oleaje pasa por la medida de
desplazamientos verticales de la superficie de la mar en un punto determinado. Un
ejemplo clásico sería la serie temporal obtenida por un registrador de oleaje que
proporciona un seguimiento de la superficie de la lámina libre de un fluido dinamizada
por el paso de olas.
El análisis de la serie temporal permite conocer hasta qué punto la superficie del
agua se desplaza hacia arriba o hacia abajo desde su nivel medio. Cada ola individual se
define identificando dos instantes consecutivos en los que la superficie de la mar cruza
el nivel medio en sentido ascendente. Este método de identificación de olas se conoce
como el método de corte ascendente por cero (figura 5.IV).
Cada ola identificada en el registro puede ser caracterizada por su periodo (tiempo
transcurrido entre dos cruces ascendentes consecutivos) y su altura (distancia vertical
entre una cresta y el seno consecutivo entre dos cortes ascendentes por cero); como
resultado de este ejercicio se obtiene una serie de olas. Si ordenamos la serie de olas así
identificadas el registro se puede usar para cálculos estadísticos de altura o periodo.
Dos de los valores estadísticos más comunes son la altura de ola significante �̅�1/3
y el periodo medio �̅�𝑧 . Otros parámetros relevantes que se pueden estimar a partir del
registro son: altura de la ola máxima (Hmáx) o el valor promedio del 10% de las olas
más altas �̅�10. Los dos últimos parámetros se suelen usar en el diseño y evaluación
costera y sólo son posibles cuando se obtiene una medida directa del desplazamiento de
la superficie. Con medidas indirectas del oleaje no se pueden obtener estos parámetros
de diseño.
Durante el siglo XIX y parte del XX el oleaje se medía con estimaciones visuales, a
partir de escalas empíricas como la que confeccionó el almirante inglés Sir Francis
Beaufort en 1.805. Fue adoptada posteriormente por los marinos mediante la escala
Douglas, creada por dicho almirante inglés. Esta clasificación del oleaje aún es habitual
utilizarla en los partes meteorológicos marinos.
Como ya hemos visto previamente, la altura de una ola en alta mar viene dada por
la fuerza del viento, por su persistencia y por el alcance o fetch. Para una velocidad dada

20
del viento, existe un valor máximo de fetch y de duración, más allá de la cual la ola no
crecerá más. En tales condiciones se dice que la mar está totalmente desarrollada. La
razón por la cual las olas no aumentan de dimensiones se debe a que pierden energía
cuando las crestas son rotas por el viento.
Actualmente se puede conocer de forma casi exacta la altura de las olas gracias al
avance en las telecomunicaciones. Los datos del oleaje, tanto en las costas como en alta
mar se dispone de redes de boyas costeras y redes de aguas profundas que permiten ver
en tiempo real gran cantidad de datos como: velocidad y dirección de los vientos,
alturas de ola significante, periodo de pico del oleaje, la dirección de las corrientes y las
temperaturas de los mares, principalmente.
Las técnicas más recientes utilizan la teledetección por satélite: el radar altímetro es
instalado en un satélite y emite pulsos hacia la superficie de la mar. Los pulsos
reflejados son captados por un sensor que utiliza la diferencia de señal emitida entre
cresta y vientre de una ola. También cabe mencionar la técnica mediante el radar de
apertura sintética y el radar de dispersión.

21
3.- INICIACIÓN A LAS TEORÍAS DE OLAS
IV. 7.- ECUACIONES QUE RIGEN LA PROPAGACIÓN DEL OLEAJE
La propagación de oleaje en un fluido es un proceso no lineal. Podemos tratar sin
embargo de simplificar su análisis físico y matemático con algunas consideraciones:
Para nuestro estudio del movimiento ondulatorio consideraremos que las fuerzas
principales son las de gravedad y las producidas por las diferencias de presión,
suponiendo que el fluido es no viscoso (μ=0) y que se pueden despreciar las
tensiones tangenciales.
Supondremos que el agua es un fluido incompresible (ρ = Constante).
Aceptaremos que el movimiento, en realidad tridimensional, se reduce a una
componente horizontal u y otra vertical w.
Se supone que partimos de una ola regular bidimensional caracterizada por su
amplitud y su periodo, que se desplaza con celeridad constante y que la única
fuerza exterior que tiene efecto sobre el fluido es la gravedad terrestre. La tensión
superficial tampoco se tendrá en cuenta.
Admitiremos que se trata de un movimiento irrotacional 𝛻 × �⃗� = 0 (la presión total
es constante en cualquier punto del fluido) y que podremos, por tanto, definir un
potencial de velocidades tal que 𝛻∅ = �⃗� . El fondo impermeable se encontrará a profundidad constante.
El efecto de Coriolis y las pérdidas de energía por rotura de la ola son
despreciables.
Escribamos pues la siguiente ecuación de la conservación de la cantidad de
movimiento para fluidos no viscosos (Ecuación de Euler):
𝜕�⃗⃗�
𝜕𝑡+
1
2𝛻 (𝑢2⃗⃗⃗⃗ ) + (𝛻 × �⃗� ) × �⃗� =
1
𝜌𝛻𝑃 + 𝑔 (3)
donde �⃗� es el campo escalar de velocidades del fluido, P es la presión hidrostática del
fluido (que depende de las coordenadas (x, z)), 𝑔 es el vector constante de aceleración
producida por la gravedad y ρ es la densidad del fluido. 𝛻 es el operador vectorial
nabla.
Hemos considerado un sistema de referencia cartesiano cuyo plano (x, y) es
tangencial a la superficie de la Tierra y cuyo eje z es vertical (paralelo a un radio de la
Tierra) y positivo hacia arriba, teniendo como origen la altura de equilibrio para el
fluido, es decir, aquella altura en la que la superficie del fluido está especular. Así, las
ondas se mueven en el plano x y. Por lo tanto, tendrán asociada una función de onda
bidimensional (que depende de dos variables). El valor de la función de onda se mide
desde el cero del sistema de referencia.
La ecuación (8) es físicamente mucho más simple de lo que a primera vista podría
parecer: el primer miembro es el desarrollo de la derivada total de la velocidad �⃗� , y el
segundo es la suma de las aceleraciones debidas a la variación (gradiente) de presión y a
la fuerza de la gravedad.

22
Tenemos pues una ecuación del movimiento para fluidos pero, a pesar de que
sabemos que la función de onda debe ser congruente con dicha ecuación, aún
desconocemos cómo obtenerla a partir de ella.
Por lo tanto, la pretensión es llegar a una ecuación de onda, compatible con la
ecuación del movimiento, cuya solución fuera precisamente la función de onda.
Para conseguirlo debemos recurrir, además de a la ecuación del movimiento, a la
ecuación de continuidad o ecuación de conservación de masa. Esta ecuación establece
que en el flujo de un fluido, si no existen vertederos o manantiales de líquido, la masa
siempre debe conservarse. Es decir:
𝜕𝜌
𝜕𝑡+ 𝛻. (𝜌�⃗� ) = 0 (4)
Un caso particular de (9) se da cuando el fluido es incompresible, es decir, cuando
ρ no cambia con el tiempo. Con lo cual:
∇�⃗� = 0 (5)
Así, un fluido incompresible fluye siempre de forma tal que sus líneas de flujo son
siempre paralelas, aunque no necesariamente rectas, es decir, no divergen ni convergen.
Vamos a exponer ahora las ecuaciones que gobiernan la propagación del oleaje en
el fluido ideal.
Ecuación de Laplace: la cumplen los flujos irrotacionales e incompresibles y
considera que no hay variación ni de masa ni de volumen en el tiempo
(incompresibilidad y conservación de la masa).
𝜕2∅
𝜕𝑥2 +𝜕2∅
𝜕𝑧2 = 0 (6)
Primera condición de contorno en la superficie libre. Considera que las partículas
de agua en la superficie libre 휂(𝑥, 𝑡)permanecen en ésta:
𝜕∅
𝜕𝑧=
𝜕𝜂
𝜕𝑡+
𝜕∅
𝜕𝑥.𝜕𝜂
𝜕𝑥𝑤 =
𝜕𝜂
𝜕𝑡+ 𝑢.
𝜕𝜂
𝜕𝑥 (7)
휂(𝑥, 𝑡) es el desplazamiento medio del agua en la superficie libre con referencia al
nivel medio del agua (z=0) y w es la componente vertical de la velocidad.
Segunda condición de contorno en la superficie libre (ecuación de Bernoulli).
𝜕∅
𝜕𝑡+
𝑝𝑎𝑡𝑚
𝜌+
1
2(𝛻∅)2 + 𝑔휂 = 0 (8)
Condición de contorno por fondo. La componente vertical de la velocidad ha de ser
nula en las partículas del fondo. La función que delimita el fondo es z = -h(x).
𝑤 = −𝑢.𝜕ℎ
𝜕𝑥= 0 (9)

23
Condición de contorno lateral. Debido a la suposición de oleaje regular y periódico,
esta condición de contorno debe expresar la periodicidad en una longitud de onda 𝜆
y periodo T.
∅(𝑥, 𝑡) = ∅(𝑥 + 𝜆, 𝑡) (10)
∅(𝑥, 𝑡) = ∅(𝑥, 𝑡 + 𝑇) (11)
IV. 8.- TEORÍA LINEAL DE AIRY
IV.8.1.- INTRODUCCIÓN
La mar nunca es regular. Las olas entre las que deben navegar los buques son
irregulares y de naturaleza aleatoria. Dos olas, en general, no tienen la misma altura y
además viajan a través de la superficie de la mar a diferentes velocidades (celeridad) y
en distintas direcciones. Las técnicas para hacer frente a la naturaleza caótica de estas
olas en la superficie real de la mar se describirán más adelante, pero antes es necesario
discutir las características de las olas comenzando por el estudio de las olas regulares
ideales.
La ola regular de Airy nunca se forma en un océano real sino que para el estudio y
conocimiento de su influencia sobre los buques es necesario generarla en un Canal de
Experiencias Hidrodinámicas. Las conclusiones de estos estudios constituyen la base de
los experimentos del comportamiento en la mar con modelos a escala.
Se puede afirmar que la teoría de las olas irregulares que más adelante veremos, se
basa sobre el supuesto de que se pueden representar por la superposición de olas suma
de un conjunto adecuado de olas regulares. Por lo tanto se deduce que las características
de las olas regulares tienen una profunda influencia sobre el comportamiento de los
buques en mares agitadas aunque nunca se las vayan a encontrar realmente en la mar.
La comprensión de su naturaleza es una de las herramientas vitales para el estudio del
comportamiento del buque en la mar.
Si bien hubo momentos en que se abandonó la teoría de olas regulares, parece que
con el desarrollo del modelo matemático, la ola de Airy es la más simple y también la
más útil ya que se presta con mayor facilidad a la representación de una ola de tormenta
usando las series de Fourier.
La teoría de Airy es la base para construir el modelo de Longuet- Higgins para la
descripción de una mar irregular como suma de muchas olas regulares. Esta teoría de
olas también servirá en algunos casos para describir mares de fondo de olas que han
viajado grandes distancias desde la superficie afectada por los vientos (fetch) en la que
se formaron.
IV.8.2.- PLANTEAMIENTO DE LAS ECUACIONES
Todas las ecuaciones expuestas hasta ahora forman un sistema no lineal de
ecuaciones diferenciales. La teoría lineal de Airy simplifica la estructura física y
matemática del fenómeno para aproximarse a la solución real.
Airy supone el potencial de la velocidad como el producto de los siguientes
términos independientes:

24
∅ (x,z,t)= X(x).Z(z).R(t) (12)
y simplifica la primera ecuación de contorno (12) considerando que la amplitud
comparada con la longitud de onda es pequeña. Podemos considerar:
𝑤𝑧=0 =𝜕𝜂
𝜕𝑡+ 𝑢. {
𝜕𝜂
𝜕𝑥}=0
≈𝜕𝜂
𝜕𝑡 (13)
También simplifica y hace lineal la segunda ecuación de contorno en la superficie
libre. Tomando el valor de la presión en la superficie libre igual a 0 y considerando u y
w pequeñas (anulándose pues su producto) la ecuación (13) queda reducida a:
𝜕∅
𝜕𝑡+ 𝑔휂 = 0 en z=0 (14)
El fondo se considera horizontal, con lo que la condición de contorno por fondo
(14) se reescribe ahora como:
𝑤 = −𝑢 𝑒𝑛 𝑧 = −ℎ (15)
IV. 8. 3.- SOLUCIÓN DEL SISTEMA DE ECUACIONES
El potencial de velocidad ∅ (x, z, t) debe ser periódico en x, y debe ser solución de
la ecuación de Laplace. Una posibilidad que cumple este criterio es escribir R(t) del
modo siguiente:
𝑅(𝑡) = 𝑠𝑒𝑛(𝜔𝑡) 𝑐𝑜𝑛 𝜔 =2𝜋
𝑇 (16)
De este modo, podemos expresar la ecuación (12) ∅ (x, z, t) como:
∅ (x, z, t) = X(x).Z (z). 𝑠𝑒𝑛(𝜔𝑡) (17)
Con lo que la ecuación de Laplace se reescribiría:
1
𝑋
𝜕2𝑋
𝜕𝑥2+
1
𝑍
𝜕2𝑍
𝜕𝑧2= 0 (18)
La única posible solución para esta ecuación en derivadas parciales mediante el
método de separación de variables que cumple con la condición de periodicidad es:
∅(𝑥, 𝑧, 𝑡) = [𝐴 cos(𝑘𝑥) + 𝐵 𝑠𝑒𝑛 (𝑘𝑥)] . (𝐶𝑒𝑘𝑧 + 𝐷𝑒−𝑘𝑧). 𝑠𝑒𝑛(𝜔𝑡) (19)
siendo 𝑘 = 2𝜋
𝜆
Para determinar las constantes sólo hemos de imponer las condiciones de contorno
por fondo. Con todo esto obtenemos el valor del potencial de la velocidad:
∅ =𝐻
2.𝑔
𝜎.𝑐𝑜𝑠ℎ[𝑘(ℎ+𝑧)]
𝑐𝑜𝑠ℎ (ℎ+𝑧) . 𝑠𝑒𝑛(𝑘𝑥 − 𝜔𝑡) (20)

25
Mediante la segunda condición de contorno en superficie libre (13) podemos
obtener el desplazamiento del nivel del agua:
휂 =1
𝑔.𝜕∅
𝜕𝑡|𝑧=0
=𝐻
2cos (𝑘𝑥 − 𝜔𝑧) (21)
Mediante la primera condición de contorno en superficie libre (12) podemos
obtener para cualquier potencial de velocidad y su superficie libre h una expresión
que relaciona la frecuencia angular con el número de onda. Ésta nos permite encontrar
la longitud de onda en función del periodo y el calado:
λ =𝑔
2𝜋. 𝑇2. 𝑡𝑎𝑛ℎ(
2𝜋ℎ
𝜆) (22)
Es muy interesante notar que, a pesar de todas las aproximaciones que hemos
hecho, la teoría lineal de ondas puede predecir varias características de las olas, siempre
que éstas tengan una pequeña amplitud comparada con su longitud de onda. Una de
estas características es el movimiento que siguen las partículas del líquido para distintas
profundidades.
(A) (B)
Figura 6.IV
Estas relaciones, que son la base para las teorías potencial y trocoidal de la ola, en
realidad son aproximaciones matemáticas que surgen directamente de resolver la
ecuación de onda y se pueden resumir de la siguiente manera:
Para aguas profundas las partículas del fluido siguen trayectorias circulares, cuyo
diámetro decrece exponencialmente con la profundidad, figura 6.IV(A).
Para aguas intermedias las trayectorias de las partículas son elípticas y los ejes
mayor y menor disminuyen exponencialmente con la profundidad, siendo el eje
mayor paralelo a las superficies de nivel, figura 6.IV (B).
Por último, para aguas someras las trayectorias son como las de aguas intermedias,
pero el eje mayor es independiente de la profundidad.

26
Se debe aclarar que las profundidades siempre están referidas a la longitud de
onda. No se puede afirmar que una zona es profunda o somera si no la comparamos
con la longitud de la onda que se propaga en ella.
En la Tabla I se resumen algunas características de las olas procedentes de la Teoría
Lineal de Airy (Fuente: Coastal Engineering Manual):
TABLA I
Profundidad
relativa
Aguas poco profundas
d/λ < 1/25
Aguas intermedias
1/25< d/λ<1/2
Aguas muy profundas
d/λ<1/2
Perfil de la
ola 휂 =
𝐻
2𝑐𝑜𝑠 (
2𝜋𝑥
𝜆−
2𝜋𝑡
𝑇) =
𝐻
2𝑐𝑜𝑠휃
Celeridad de
la ola 𝑐 =
𝜆
𝑇= √𝑔𝑑 𝑐 =
𝜆
𝑇=
𝑔𝑇
2𝜋𝑡𝑎𝑛ℎ
2𝜋𝑑
𝜆 𝑐 = 𝑐0 =
𝜆
𝑇=
𝑔𝑇
2𝜋
Longitud de
onda 𝜆 = 𝑇√𝑔𝑑 = 𝑐𝑇
𝜆 =𝑔𝑇2
2𝜋𝑡𝑎𝑛ℎ
2𝜋𝑑
𝜆 𝜆 = 𝜆0 =
𝑔𝑇2
2𝜋= 𝑐0𝑇
Velocidad de
grupo 𝑐𝑔 = 𝑐 = √𝑔𝑑 𝑐𝑔 = 𝑛𝑐 =
1
2[1 −
4𝜋𝑑/𝜆
𝑠𝑒𝑛ℎ(4𝜋𝑑 𝜆⁄ )] . 𝑐 𝑐𝑔 =
1
2𝑐 =
𝑔𝑇
4𝜋
Velocidad de
partícula
a) Horizontal
b) Vertical
𝑢 =𝐻
2√
𝑔
𝑑cos 휃
𝑤 =𝐻𝜋
𝑇(1 −
𝑧
𝑑) 𝑠𝑒𝑛휃
𝑢 =𝐻
2
𝑔𝑇
𝜆
𝑐𝑜𝑠ℎ[2𝜋(𝑧 + 𝑑)/𝜆]
cosh (2πd λ⁄ )𝑐𝑜𝑠휃
𝑤 =𝐻
2
𝑔𝑇
𝜆
𝑠𝑒𝑛ℎ[2𝜋(𝑧 + 𝑑)/𝜆]
cosh (2πd λ⁄ )𝑠𝑒𝑛휃
𝑢 =𝜋𝐻
𝑇𝑒2𝜋𝑧 𝜆⁄ 𝑐𝑜𝑠휃
𝑤 =𝜋𝐻
𝑇𝑒2𝜋𝑧 𝜆⁄ 𝑠𝑒𝑛휃
IV. 9.- TEORÍA DE STOKES.
IV. 9. 1.- SOLUCIÓN NO LINEAL DE LA ECUACIÓN DE OLAS EN FONDO
ILIMITADO.
En el apartado anterior hemos visto que la teoría lineal de Airy es la base para
construir el modelo de Longuet- Higgins, el cual describe una mar irregular como suma
de muchas olas regulares. Además la experiencia ha demostrado que las hipótesis de
Airy para obtener su ecuación de la ola regular sinusoidal, tienen una más amplia
validez de lo que en principio pudo preverse.
Fue Stokes (1819-1903) quien desarrolló el método de las perturbaciones para
obtener perfiles de ola de órdenes superiores a partir de la teoría lineal de Airy.
El método se basa en un proceso de aproximaciones sucesivas con las que se
obtienen las expresiones del potencial de velocidades y del perfil de la ola de órdenes
sucesivos. Cada expresión de un orden n es la base para la de orden n+1. La expresión
del primer orden es:
∅(𝑛) = ∑ 휀𝑗−1𝑛𝑗=1 . ∅𝑗−1 y 휂(𝑛) = ∑ 휀𝑗−1𝑛
𝑗=1 . 휂𝑗−1 (23)
Siendo:
휀 =𝑘. 𝐻
2= 𝑘.𝐴 =
2𝜋𝐴
𝜆
Siguiendo un proceso similar al de Airy, se llega a las siguientes expresiones
siempre que la profundidad del agua pueda considerarse como de fondo ilimitado:

27
∅(2) = ∅0 + 휀∅1 = 𝐶. ∅0 (24)
휂(2) = 𝐴. cos(𝑘𝑥 − 𝜔𝑡) +1
2𝑘𝐴2𝑐𝑜𝑠[2(𝑘𝑥 − 𝜔𝑡)] (25)
Las expresiones anteriores demuestran que, en aguas suficientemente profundas, el
potencial conserva su aspecto (C es constante) y que la ecuación de la ola se puede
obtener como suma de dos olas sinusoidales. El perfil resultante, de crestas más picudas
y senos más planos, figura 7.IV, se acerca más a la realidad que la ola lineal de Airy.
Figura 7.IV
IV. 9. 2.- SOLUCIÓN NO LINEAL DE LA ECUACIÓN DE OLAS EN FONDO
LIMITADO.
Para describir la ola en aguas poco profundas, en el plano x, y, Stokes propone una
ecuación cuyo desplazamiento en ordenadas es de la forma:
𝑦 =𝐻
2𝑐𝑜𝑠 (
2𝜋𝑥
𝜆−
2𝜋𝑡
𝑇) +
3
64
𝜆2.𝐻2
𝜋2ℎ3𝑐𝑜𝑠 [2 (
2𝜋𝑥
𝜆−
2𝜋𝑡
𝑇)] (26)
en la que la longitud de onda λ y la celeridad de la ola son idénticas a las de la teoría
lineal.
La componente horizontal u de la velocidad es:
𝑢 =𝜆𝐻
2ℎ𝑇𝑐𝑜𝑠 (
2𝜋𝑥
𝜆−
2𝜋𝑡
𝑇) +
3
64
𝜆3.𝐻2
𝜋2ℎ4𝑇𝑐𝑜𝑠 [2 (
2𝜋𝑥
𝜆−
2𝜋𝑡
𝑇)] (27)
La altura de la ola Hr correspondiente al periodo T y a la profundidad h a la que se
produce la rotura, es:
𝐻𝑟 =16𝜋2ℎ2
3𝑔𝑇2(−1 + √1 +
3𝑔𝑇2
4𝜋2ℎ) (28)
cuyos valores característicos se indican en la Tabla II:
TABLA II
Profundidades de rotura h (m)
Periodo T
(s)
Altura de la ola Hr(m)
1 2 5 10
5 1,3 2,1 4,2 7,2
7,5 1,6 2,6 5,1 8,6
10 1,8 3,0 5,9 9,8
12,5 2,1 3,5 6,6 11,0
15 2,3 3,9 7,4 12,1

28
La energía de la ola de frente b, es: 𝐸 =𝜌𝑔𝐻2𝜆𝑏
8(1 +
9
64
𝐻2
(2𝜋
𝜆)4ℎ6
) (29)
La potencia de la ola de frente b, es: 𝑁 =𝜌𝑔𝐻2𝑐𝑔𝑏
8(1 +
9
64
𝐻2
(2𝜋
𝜆)4ℎ6
) (30)
siendo 𝑐𝑔 = 𝑐 = √𝑔ℎ
Comparando estas ecuaciones con las correspondientes obtenidas en la Teoría de
onda lineal, la Teoría de Stokes las modifica mediante el factor de corrección:
9
64
𝐻2
(2𝜋
𝜆)4ℎ6
(31)
que para grandes profundidades tiende a cero.
IV. 10.- TEORÍA DE LA ONDA SOLITARIA
La característica principal de la onda descrita con esta teoría es que su superficie
está en cada instante por encima del nivel medio de la mar (NMM) en la zona
considerada, figura 8.IV. El perfil de la ola viene dado por el desplazamiento vertical y,
para cada posición x, en cada instante t, en la forma:
𝑦 = 𝐻𝑠𝑒𝑐ℎ2 [√3𝐻
4ℎ3(𝑥 − 𝑐𝑡)] (32)
siendo el valor de la celeridad: 𝑐 = √𝑔𝐻(1 +𝐻
ℎ) (33)
Figura 8.IV
La componente horizontal de la velocidad de las partículas del agua se define
como:
𝑢 = √𝑔
ℎ𝑦 = √
𝑔
ℎ𝐻𝑠𝑒𝑐ℎ2 [√
3𝐻
4ℎ3(𝑥 − 𝑐𝑡)] (34)
y la condición de rotura de la ola:
𝐻𝑟 = 0,714ℎ𝑟 (35)

29
Como ejemplos de este tipo especial de ondas no lineales conocidas como solitones
u ondas solitarias, podemos citar:
1. El tsunami
2. La onda cnoidal
1.- Un tsunami (del japonés tsu, puerto o bahía y nami, ola) o maremoto es un
fenómeno que da lugar a la formación de un grupo de olas de gran energía y de tamaño
variable que se producen cuando algún suceso extraordinario desplaza verticalmente
una gran masa de agua muy superior a las olas superficiales generadas por el viento. Se
puede afirmar que el 90% de estos fenómenos son provocados por terremotos, en cuyo
caso reciben el nombre de maremotos tectónicos, figura 9.IV.
Figura 9.IV
No existe un límite claro del mínimo valor del grado del seísmo capaz de generar
un tsunami. Los elementos determinantes para que ocurra un tsunami son, entre otros, la
magnitud del seísmo originador, la profundidad del hipocentro y la morfología de las
placas tectónicas involucradas. Esto hace que para algunos lugares del planeta se
requieran grandes seísmos para generar un tsunami, en tanto que para otros, basta con la
existencia de seísmos de menor magnitud. En otros términos: La geología local, la
magnitud y la profundidad focal son parte de los elementos que definen la ocurrencia o
no de un tsunami de origen tectónico.
La velocidad de las olas puede determinarse a través de la ecuación:
𝑣 = √𝑔. ℎ (36)
donde h es la profundidad del agua que está directamente sobre el seísmo y g, la
aceleración de la gravedad.
A profundidades entre 4.000 y 5.000 metros las olas viajarán a velocidades en torno
a los 600 kilómetros por hora. Su amplitud superficial o altura de la cresta H puede ser
pequeña, pero la masa de agua que agitan es enorme, y por ello su velocidad es tan

30
grande. Es habitual que la longitud de onda de la cadena de maremotos sea de 100 a
200 kilómetros.
Cuando la ola entra en aguas poco profundas, se ralentiza y aumenta su altura. El
período de la onda puede ser desde menos de diez minutos hasta media hora o más.
Cuando la ola entra en la plataforma continental, la disminución drástica de la
profundidad hace que su velocidad disminuya y empiece a aumentar su altura. Al llegar
a la costa, la velocidad habrá decrecido hasta unos 50 kilómetros por hora, mientras que
la altura ya será de unos 3 a 30 m, dependiendo del tipo de relieve que se encuentre. La
longitud de onda λ también se estrechará cerca de la costa.
Debido a que la onda se propaga en toda la columna de agua, desde la superficie
hasta el fondo, se puede hacer la aproximación a la teoría lineal de la hidrodinámica.
Así, el flujo de energía E se calcula como:
𝐸 =1
8𝜌𝑔3 2⁄ 𝐻2 . ℎ1 2⁄ (37)
siendo ρ la densidad del fluido.
La teoría lineal (apartado IV.9) predice que las olas conservarán su energía
mientras no rompan en la costa. La disipación de la energía cerca de la costa dependerá,
como se ha dicho, de las características del relieve marino. La manera como se disipa
dicha energía antes de romper depende de la relación H/h. Una vez que llega a tierra, la
forma en que la ola rompe depende de la relación H/λ. Como λ siempre es mucho mayor
que H, las olas romperán como lo hacen las olas bajas y planas. Esta forma de disipar la
energía es poco eficiente, y lleva a la ola a viajar tierra adentro como una gran marea.
2.- El concepto de ola cnoidal procede de las observaciones y descripciones
documentadas sobre la onda solitaria del ingeniero escocés John Scott Russell (1834)
en un canal cerca de Edimburgo. Se trataba de una ola creada en un canal de poca
profundidad, que se propagaba a gran velocidad sin cambio aparente en su forma o en
su velocidad durante un periodo de tiempo sorprendentemente largo.
Russell fue capaz de repetir dicho fenómeno en su laboratorio proponiendo una
fórmula para la velocidad de propagación c:
c2 = g (h + a) (38)
siendo g la aceleración de la gravedad, h la profundidad del agua en estado de equilibrio
y a la amplitud de la ola.
De esta ecuación se deduce que a mayor amplitud, mayor velocidad. También
consiguió crear dos olas simultáneas de diferentes alturas, yendo la más alta siempre por
delante y alejándose de la más baja.
Desde el principio, estas observaciones de Russell causaron polémica y tardaron
años en ser aceptadas, en gran parte, a causa de la oposición de Stokes en una primera
instancia, y sobre todo de Airy. Este último era muy escéptico sobre la posibilidad de
que la ola se mantuviera siempre por encima del nivel medio de la mar (NMM) y de que
no se dispersara y, por tanto, no cambiara de forma.

31
En 1895 Korteweg y de Vries propusieron para la ola cnoidal la ecuación que hoy
lleva su nombre:
휂𝑡 + (𝑐0 + 𝑐1휂)𝑑𝜂
𝑑𝑥+ 𝑣
𝑑3𝜂
𝑑𝑥3 = 0 (39)
La función 휂𝑡(x, t) mide la desviación en el punto x en el tiempo t de la altura del
fluido respecto de su posición de equilibrio (NMM). Los parámetros c0, c1 y ν dependen
de las constantes físicas del problema.
Observemos que si en la ecuación anterior eliminamos el término no lineal
haciendo c0 = c1 = 0 obtenemos la ecuación de Airy.
Como conclusión se puede decir que la existencia de dicha ola solitaria ha de ser
consecuencia de un equilibrio perfecto entre la dispersión provocada por el término de
tercera derivada y el de concentración o choque creado por la interacción no lineal.
Es fácil obtener la ola solitaria a partir de la ecuación de Korteweg y de Vries. Para
ello y por simplicidad de cálculos posteriores tomaremos c0 = 0, c1= 3/2 y ν = 1/4, con
lo que obtenemos la ecuación
휂𝑡 = −1
4(6휂
𝑑𝜂
𝑑𝑥+
𝑑3𝜂
𝑑𝑥3) (40)
Buscamos olas solitarias, es decir, soluciones del tipo 휂𝑡(x, t) = f (y) con y = x – ct,
por lo que:
sustituyendo en (40):
– 𝑐𝑓′ =1
4(6𝑓𝑓′ + 𝑓′′′) (41)
integrando y, tras multiplicar por f’, volviendo a integrar obtenemos:
−𝑐
2𝑓2 =
1
4(𝑓3 +
𝑓′2
2) + 𝑎𝑓 + 𝑏 (42)
siendo a y b constantes cualesquiera. En particular si a = b = 0 se puede integrar
directamente y obtener:
𝑓(𝑦) = 2𝑐. 𝑠𝑒𝑐ℎ2(√𝑐. 𝑦 + 𝛼) (43)
que con las constantes adecuadas es la onda solitaria propuesta por Boussinesq y
Rayleigh. De hecho éste fue el cálculo hecho por Korteweg y de Vries.
Éstos obtuvieron algo más, ya que, variando los parámetros, se obtienen otras
soluciones. En particular se puede probar la existencia de soluciones periódicas que no
son senoidales de acuerdo a la teoría de Stokes.

32
Figura 10.IV
A estas soluciones Korteweg y de Vries las llamaron ondas cnoidales (figura 10.IV)
Cada una de las olas de la serie cnoidal se denominan solitones, siendo la ola única
observada por Russel el solitón-1.
IV. 11.- SELECCIÓN DE LA TEORÍA MÁS ADECUADA A CADA CASO
A veces resulta práctico resolver algunos problemas relacionados con la dinámica
del buque sometiéndolo a los efectos de una ola regular de unas ciertas características.
Como el resultado, en general es pesimista, permite acotar con rapidez el orden de
magnitud del fenómeno en estudio.
33
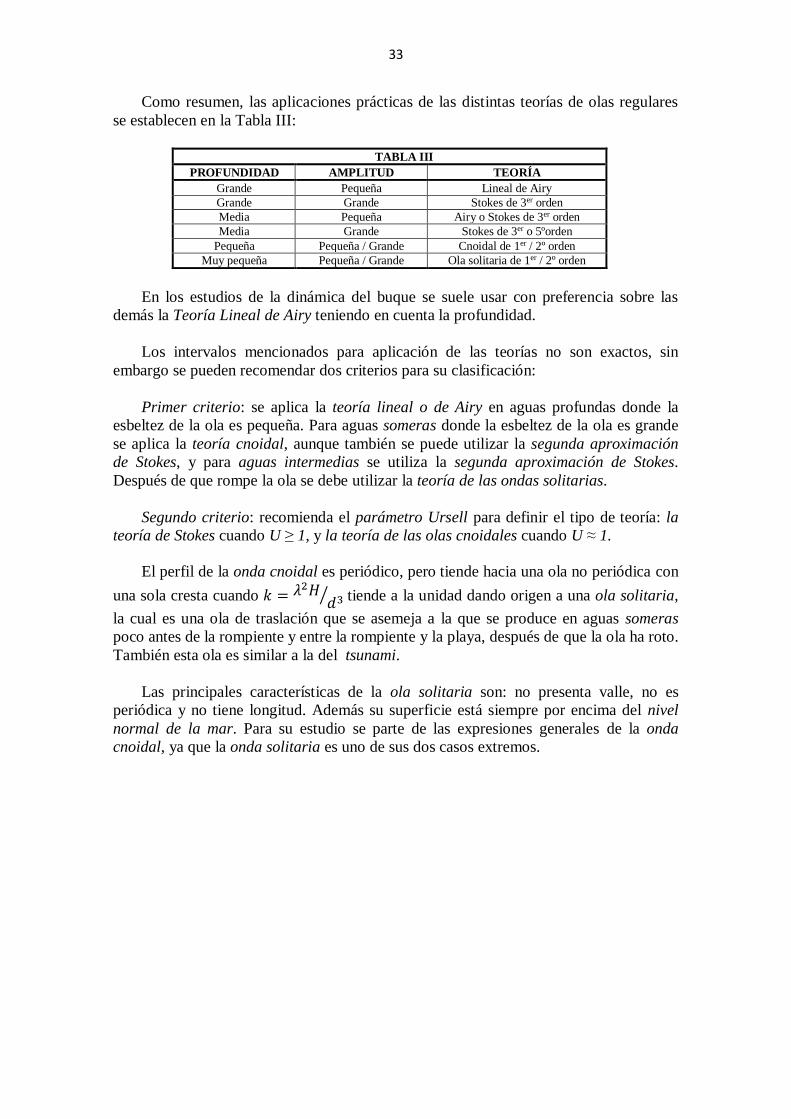
Como resumen, las aplicaciones prácticas de las distintas teorías de olas regulares
se establecen en la Tabla III:
TABLA III
PROFUNDIDAD AMPLITUD TEORÍA
Grande Pequeña Lineal de Airy
Grande Grande Stokes de 3er orden
Media Pequeña Airy o Stokes de 3er orden
Media Grande Stokes de 3er o 5ºorden
Pequeña Pequeña / Grande Cnoidal de 1er / 2º orden
Muy pequeña Pequeña / Grande Ola solitaria de 1er / 2º orden
En los estudios de la dinámica del buque se suele usar con preferencia sobre las
demás la Teoría Lineal de Airy teniendo en cuenta la profundidad.
Los intervalos mencionados para aplicación de las teorías no son exactos, sin
embargo se pueden recomendar dos criterios para su clasificación:
Primer criterio: se aplica la teoría lineal o de Airy en aguas profundas donde la
esbeltez de la ola es pequeña. Para aguas someras donde la esbeltez de la ola es grande
se aplica la teoría cnoidal, aunque también se puede utilizar la segunda aproximación
de Stokes, y para aguas intermedias se utiliza la segunda aproximación de Stokes.
Después de que rompe la ola se debe utilizar la teoría de las ondas solitarias.
Segundo criterio: recomienda el parámetro Ursell para definir el tipo de teoría: la
teoría de Stokes cuando U ≥ 1, y la teoría de las olas cnoidales cuando U ≈ 1.
El perfil de la onda cnoidal es periódico, pero tiende hacia una ola no periódica con
una sola cresta cuando 𝑘 = 𝜆2𝐻𝑑3⁄ tiende a la unidad dando origen a una ola solitaria,
la cual es una ola de traslación que se asemeja a la que se produce en aguas someras
poco antes de la rompiente y entre la rompiente y la playa, después de que la ola ha roto.
También esta ola es similar a la del tsunami.
Las principales características de la ola solitaria son: no presenta valle, no es
periódica y no tiene longitud. Además su superficie está siempre por encima del nivel
normal de la mar. Para su estudio se parte de las expresiones generales de la onda
cnoidal, ya que la onda solitaria es uno de sus dos casos extremos.

34
4.- EL OLEAJE IRREGULAR: ANÁLISIS ESPECTRAL
IV. 12.- INTRODUCCIÓN
En el apartado IV.9 hemos analizado la teoría lineal de Airy sobre las olas regulares
cuyo conocimiento es imprescindible para el Ingeniero Naval y Oceánico que va a
continuar con el estudio de las olas que realmente se producen en los océanos por
acción de los vientos.
El término oleaje designa un fenómeno físico muy concreto, como es el
correspondiente a las oscilaciones de la elevación de la superficie de la mar generadas
por el viento y las olas que se sienten a bordo de un buque, o las que sufre una
estructura marina como un dique en la costa o una plataforma en alta mar.
Cualquiera que sea la configuración de los océanos y las irregularidades de los
vientos, un observador verá un modelo confuso y cambiante de crestas y senos de olas
viajando en diversas direcciones. Durante muchos años este evidente caos y la
resultante naturaleza impredecible de los movimientos de los buques, constituyó un
insuperable obstáculo para el progreso de los estudios en el campo del comportamiento
del buque en la mar. Sin embargo, desde hace unos pocos años se ha conseguido un
considerable progreso aplicando métodos estadísticos para cuantificar las características
de las olas sobre la superficie de los mares. Estos métodos forman los fundamentos de la
moderna teoría del comportamiento del buque en la mar.
Como veremos, el oleaje se caracteriza por un rango de periodos y longitudes de
onda concretos que lo diferencia del resto de fenómenos ondulatorios oceánicos.
En cuanto a las alturas de las olas, que se definen como la distancia en vertical entre
la cresta y el valle de la ola, también existe un amplio rango de valores que puede variar
de menos de un metro en los casos de calmas o brisas suaves, hasta los casos de
temporales huracanados donde las olas alcanzan valores de 14 o más metros. Según
informes de buques en la Mar de Tasmania se detectaron olas cercanas a los treinta
metros.
La importancia del estudio del oleaje se centra en dos aspectos, uno puramente
científico y otro de carácter práctico.
Desde el punto de vista científico el oleaje es uno de los mecanismos más
importantes de transferencia de energía entre la atmósfera y el océano. Otro aspecto
importante desde el punto de vista científico incide en el estudio de la propia dinámica
del oleaje y de sus mecanismos de propagación.
Desde el punto de vista práctico, el estudio del oleaje se enfoca en los campos de la
ingeniería naval y civil, como es el diseño de diques, buques, estructuras en alta mar, la
ayuda a la toma de decisiones en la gestión costera, etc. Así el estudio del oleaje se
enmarca en un área difusa que va desde las matemáticas y la física hasta la ingeniería.
Aunque las ecuaciones básicas que rigen la dinámica del oleaje se conocen
prácticamente desde el siglo XIX, fue durante la segunda mitad del siglo XX cuando se
obtuvieron resultados teóricos y prácticos capaces de caracterizar el oleaje

35
adecuadamente. En la actualidad el conocimiento del oleaje permite obtener resultados
útiles, como es el caso de los modelos numéricos de predicción de oleaje, que veremos
más adelante, plenamente operativos, o el conocimiento de la estructura estadística del
comportamiento del oleaje y su empleo para el diseño más eficiente de estructuras
marinas.
De entre todos los campos de investigación abiertos actualmente uno de los más
interesantes para el Ingeniero Naval y Oceánico se centra en el conocimiento de los
mecanismos hidrodinámicos de propagación del oleaje. Se sabe que el oleaje y las
consecuencias a que da lugar, son fenómenos altamente no lineales (aunque para
algunas aplicaciones prácticas baste con el uso de una aproximación lineal), tanto en las
propagación temporal y espacial de cada ola individual, como en la interacción y
transferencia de energía entre olas adyacentes. Como ejemplo de fenómenos que afectan
a la propagación hidrodinámica del oleaje cabe destacar dos:
1. El fenómeno conocido como el agrupamiento del oleaje
2. La formación de olas gigantes.
1.- El agrupamiento del oleaje es un fenómeno conocido desde la antigüedad: las
olas en su propagación a lo largo del océano tienden a formar paquetes de olas
consecutivas altas seguidos de olas de menor altura. Estos paquetes de olas altas, o
grupos, son de especial peligrosidad tanto para buques en ruta como para estructuras
marinas, ya que son de periodo similar, que cuando son cercanos a los periodos de
resonancia de dichas estructuras marinas pueden producir daños severos.
Aunque la teoría estándar del oleaje, basada fundamentalmente en una física lineal,
predice la existencia de los grupos, experiencias de laboratorio indican que el fenómeno
del agrupamiento es más complicado de lo que pudiese parecer y que los grupos de olas
son más estables en el tiempo de lo que indica la teoría lineal. En la actualidad existen
diversos enfoques matemáticos del problema basados en métodos no lineales para
abordar este problema, entre ellos cabe destacar el estudio de los grupos mediante una
modificación no lineal de la ecuación de Schrödinger, ecuación que en su versión lineal
inicial se utilizó en el desarrollo de la mecánica cuántica.
2.- Para el estudio de las olas gigantes existen equipos de investigación en todo el
mundo dedicados a abordar el problema desde el punto de vista tanto teórico como
experimental. El inicio del estudio parte de informes reportando la existencia de olas
anormalmente altas descritas como muros de agua propagándose en aguas profundas.
En la actualidad se sabe que este tipo de olas son más probables de lo que la teoría lineal
indica. De hecho, el 1 de enero de 1995 en la plataforma petrolífera de Draupner en el
mar del Norte se registró una ola de este tipo con una altura de 25,63 metros, donde la
profundidad de la mar era de 70 metros. Debido a la fecha en la que se registró la
medida, esta ola se conoce como la ola del año nuevo (New Year Wave).
IV. 13.- CARACTERÍSTICAS DEL OLEAJE IRREGULAR
El oleaje es una sucesión continuada de olas. Los estudios del oleaje, tal y como
hoy se realizan, nacieron durante la Segunda Guerra Mundial, con los investigadores
Sverdrup y Munk al recibir el encargo de las fuerzas aliadas de llevar a cabo la previsión
de oleaje del día señalado para el desembarco en las costas de Normandía.

36
El método de Sverdrup y Munk (publicado en 1947) introduce relaciones entre los
conceptos de altura de la ola significante �̅�𝑠 , duración del oleaje t, la longitud de la
superficie sobre la que actúa el viento, fetch, F, la pendiente de la ola (altura de la
ola/longitud de onda), δ, edad del oleaje (celeridad/velocidad del viento), β, asociadas a
las fracciones adimensionales g × F/u2, g × t/u, donde g es la aceleración de la gravedad
y u la velocidad del viento generador. Determinada una de las dos fracciones
adimensionales, se puede encontrar δ o β, estimándose a partir de una de ellas �̅�𝑠 y c.
Años más tarde, Bretschneider revisa y completa este método, conocido a partir de
entonces como método SMB o de la ola significante.
Los trabajos para el entendimiento de la generación del oleaje y la definición de la
función de origen o generadora han sido y continúan siendo muy intensos. Las medidas
JONSWAP (Joint North Sea Wave Project, un proyecto liderado por la Oficina de
Investigación Naval de Londres entre las décadas de los 60 y principios de los 70) han
llegado a conocer bastantes mecanismos de la generación del oleaje pero han quedado
lejos de determinar la función de origen. Una vez definida dicha función se habrá
prácticamente resuelto el problema de la previsión del oleaje.
El gran número de trabajos realizados en el campo del oleaje, especialmente en el
terreno de la previsión asociada a la escuela espectral, debería proporcionar al Ingeniero
Naval y Oceánico los necesarios criterios para que ante un caso práctico sepa contestar a
las cuestiones siguientes:
¿Qué es un método de previsión de la escuela espectral?
¿Qué información proporciona?
¿Cuándo y cómo debe ser aplicado?
¿Qué grado de aproximación obtendrá?
La información proporcionada por los métodos de previsión es del máximo interés
para conocer el perfil y la energía de las olas desde su origen hasta su amortiguamiento
ya que a partir de que alcanzan determinadas magnitudes afectan directamente al buque
y a los sistemas que transporta. Particularmente la influencia es de la máxima
importancia cuando se trata del buque de guerra ya que sus Especificaciones plantean,
como veremos, exigencias que requieren conocer el comportamiento del buque en cada
situación con el fin de determinar el grado de cumplimiento de sus misiones en todos
los escenarios.
IV.14.- ANÁLISIS ESPECTRAL DEL OLEAJE
IV.14.1.- COMPOSICIÓN DEL OLEAJE IRREGULAR
La mar real se compone de gran cantidad de olas de muchos tamaños, longitudes y
direcciones diferentes, mezcladas entre sí, como resultado de haber sido generadas por
el viento, las mareas, etc., sometidas a perturbaciones de diferentes intensidades,
situaciones y direcciones. Finalmente se alcanza un estado tridimensional que se
denomina mar confusa, muy frecuente en la naturaleza, por lo que es importante evaluar
el comportamiento de los buques en ella.

37
Para llevar a cabo esta evaluación simplificaremos la situación considerando la
existencia de una mar irregular de dos dimensiones con un efecto equivalente sobre un
cuerpo flotante situado en donde se ha generado la mar (SEA) o en una zona próxima.
Esta marejada de dos dimensiones se puede describir matemáticamente como un
conjunto infinito de olas sinusoidales unidireccionales, con variación continua de la
frecuencia. Cada ola componente es de altura infinitesimal y fase aleatoria. En otras
palabras, se puede describir como un grupo muy numeroso de olas regulares de
longitudes diferentes, todas de pequeña altura y todas mezcladas juntas con ninguna
relación entre sí, excepto que todas están presentes y todas viajan en la misma
dirección.
El resultado es una mar irregular sin ajustarse a ningún modelo respecto de la
altura, longitud o periodo. Como ejemplo se muestra en la figura 11.IV el resultado de
combinar un pequeño número de olas regulares de diferentes longitudes, alturas y fase.
Figura 11.IV
Si con cinco olas regulares básicas se ha obtenido este resultado, con un número
infinito de olas simples el resultado sería totalmente irregular y su perfil imposible de
predecir. De hecho, la característica que más distingue la mar irregular es que nunca un
perfil se repite. Por lo tanto, no se puede definir o caracterizar una mar irregular por su
perfil o por un modelo determinado.
Hay, no obstante, una manera de definir la mar en términos sencillos. Su energía
total debe necesariamente estar compuesta por la suma de las energías de todas las
pequeñas olas regulares que la componen.
En aguas profundas, la energía por metro cuadrado de superficie de la mar, es de
ρgH2/8 J/m2, siendo ρ la densidad del agua del mar (1020 kg/m3); g la aceleración de la
gravedad (9,81 m/s2), y H la altura de la ola en metros. Por lo que la energía total de la
superficie de la mar será:
E = ρg
𝑆(ℎ1
2 + ℎ22 + ℎ3
2 + ⋯) = 1,25 ∑ ℎ𝑖2𝑁
𝑖=1 kJ/m2 (44)

38
O sea que la intensidad de la mar se caracteriza por su energía total; y lo que es
más importante, podemos conocer la contribución individual hecha por cada una de sus
olas componentes. Es decir, con cada componente de la ola de diferente longitud o
periodo (o bien, de diferente frecuencia) podemos mostrar cómo la energía total de la
mar está distribuida de acuerdo con las frecuencias de los diversos componentes de la
ola.
Esta distribución es lo que se denomina el espectro de energía de la mar, o más
simplemente el espectro de ola. Como ilustración, la figura 12.IV muestra un sencillo
esquema de un espectro formado por las mismas olas utilizadas en la figura 11.IV.
Figura 12. IV
La ordenada de las barras están expresadas como energía × segundo y se puede
considerar como un término abstracto convenientemente elegido de tal forma que el
área rayada del espectro representa la energía total del sistema cuando se traza sobre
una base de frecuencias que tiene las dimensiones de rad /segundo. Nótese que mientras
la energía de cada componente se centra en su frecuencia, tiene un pequeño ancho de
banda de tal forma que las ordenadas energía × segundo tienen valores finitos y la
curva envolvente tiene apariencia de continuidad sobre un amplio margen de
frecuencias. Esta continuidad está de acuerdo con el comportamiento de la mar real, la
cual contiene un gran número de olas que varían ligeramente de frecuencia entre sí.
Por otra parte, si nada más que hubiese cinco olas diferentes, como en el ejemplo
dado, o diez o veinte, antes o después se vería que el perfil de la ola resultante se
repetiría exactamente, lo cual no es posible en la realidad.
Por eso concluimos diciendo que la mar real está compuesta por un gran número
de olas de frecuencias que varían ligeramente las de cada una con respecto de las
próximas. Es decir, no es admisible considerar que pueda repetirse el perfil de una ola
de la mar exactamente igual a otra anterior. Para una cantidad de energía determinada
podemos ver que cuanto mayor es el número de olas considerado, menor energía o
altura posee cada una de ellas. Por último, el espectro de energía más objetiva de la
mar, es una curva suave y continua formada por un número infinito de olas regulares,

39
todas de periodo diferente y con poca diferencia de altura, como se ve en la figura
13.IV.
Figura 13.IV
Como no conocemos, y no podemos predecir, cuál es la posición relativa de una ola
componente con respecto a la de su lado, ni tampoco podemos decir cuándo varias olas
se agruparán para formar una ola más alta o para anularse entre sí, la conclusión es que
existe aleatoriedad.
Si en lugar de utilizar energía × segundo como ordenadas de la curva (resultando la
energía como un área), utilizamos metros cuadrados × segundo para la ordenada y
radianes/segundo como abscisa, resultarán metros cuadrados para el área, lo cual
constituye una indicación directa de las variaciones de altura de las olas componentes,
ya que la energía y la altura son directamente proporcionales.
Figura 14.IV
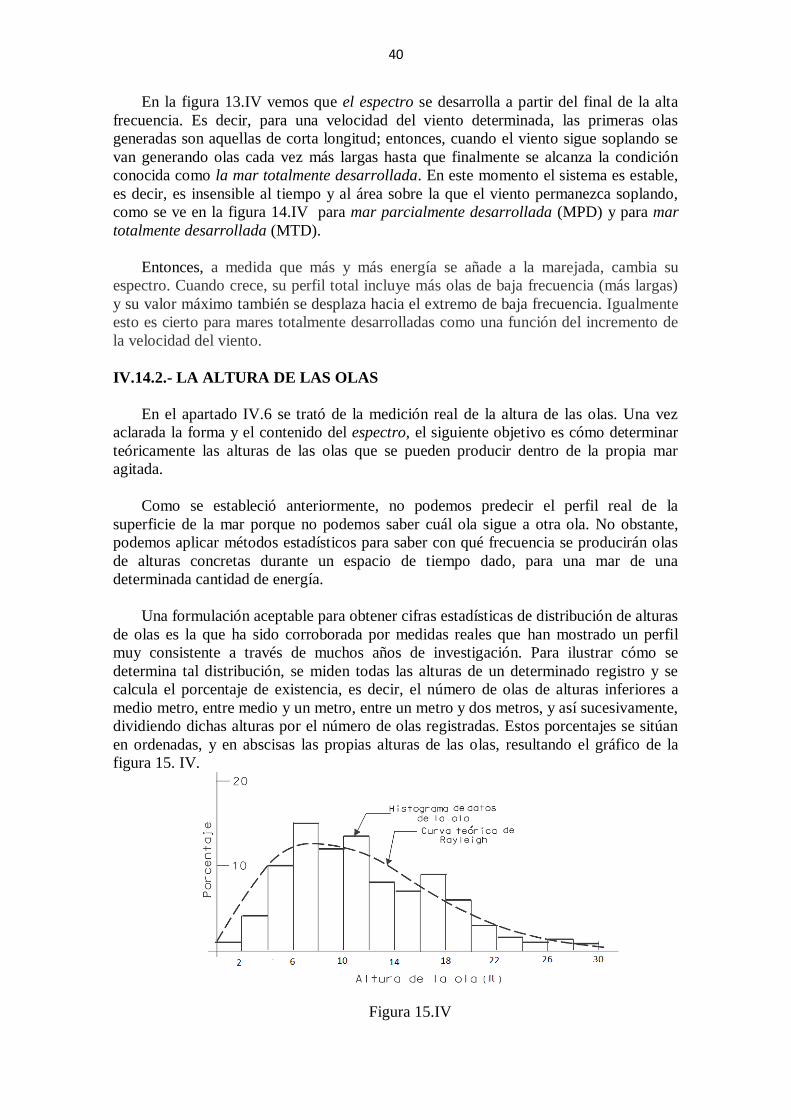
40
En la figura 13.IV vemos que el espectro se desarrolla a partir del final de la alta
frecuencia. Es decir, para una velocidad del viento determinada, las primeras olas
generadas son aquellas de corta longitud; entonces, cuando el viento sigue soplando se
van generando olas cada vez más largas hasta que finalmente se alcanza la condición
conocida como la mar totalmente desarrollada. En este momento el sistema es estable,
es decir, es insensible al tiempo y al área sobre la que el viento permanezca soplando,
como se ve en la figura 14.IV para mar parcialmente desarrollada (MPD) y para mar
totalmente desarrollada (MTD).
Entonces, a medida que más y más energía se añade a la marejada, cambia su
espectro. Cuando crece, su perfil total incluye más olas de baja frecuencia (más largas)
y su valor máximo también se desplaza hacia el extremo de baja frecuencia. Igualmente
esto es cierto para mares totalmente desarrolladas como una función del incremento de
la velocidad del viento.
IV.14.2.- LA ALTURA DE LAS OLAS
En el apartado IV.6 se trató de la medición real de la altura de las olas. Una vez
aclarada la forma y el contenido del espectro, el siguiente objetivo es cómo determinar
teóricamente las alturas de las olas que se pueden producir dentro de la propia mar
agitada.
Como se estableció anteriormente, no podemos predecir el perfil real de la
superficie de la mar porque no podemos saber cuál ola sigue a otra ola. No obstante,
podemos aplicar métodos estadísticos para saber con qué frecuencia se producirán olas
de alturas concretas durante un espacio de tiempo dado, para una mar de una
determinada cantidad de energía.
Una formulación aceptable para obtener cifras estadísticas de distribución de alturas
de olas es la que ha sido corroborada por medidas reales que han mostrado un perfil
muy consistente a través de muchos años de investigación. Para ilustrar cómo se
determina tal distribución, se miden todas las alturas de un determinado registro y se
calcula el porcentaje de existencia, es decir, el número de olas de alturas inferiores a
medio metro, entre medio y un metro, entre un metro y dos metros, y así sucesivamente,
dividiendo dichas alturas por el número de olas registradas. Estos porcentajes se sitúan
en ordenadas, y en abscisas las propias alturas de las olas, resultando el gráfico de la
figura 15. IV.
Figura 15.IV

41
Se ha encontrado que una forma simple de curva se ajusta casi perfectamente a la
mayoría de los registros del histograma de las olas. Esto es conocido como la
distribución Rayleigh y corresponde a la fórmula siguiente (en unidades inglesas):
𝑝(𝐻𝑖) =2𝐻𝑖
𝐻2̅̅ ̅̅ 𝑒−𝐻𝑖2 𝐻2̅̅ ̅̅⁄
(45)
Lo cual se puede expresar como el porcentaje de veces que una ola de altura Hi
pies (± ½ ft) se producirá entre todas las olas de la serie.
El factor 𝐻2̅̅ ̅̅ es la media de todos los valores al cuadrado de las alturas del registro,
o expresado matemáticamente:
𝐻2̅̅ ̅̅ = 1
𝑁∑ 𝐻𝑖
2𝑖=𝑁𝑖=1 (46)
donde N es el número total de olas en el registro.
Se puede admitir que este valor, al ser la media de toda la zona de la mar, debería
corresponder con mucha proximidad al utilizado en la expresión para determinar la
energía media de la mar, que es:
Energía = 𝜌𝑔
8𝐻2̅̅ ̅̅ =
𝜌𝑔
8(ℎ1
2 + ℎ22 + ℎ3
2 + ⋯) (47)
Entonces, una vez que sabemos el área bajo la curva del espectro, podemos
relacionarla directamente con la fórmula de distribución de Rayleigh y determinar, a
partir de esta, todo tipo de probabilidades de ocurrencia de diferentes alturas de las olas.
Por ejemplo, la expresión:
P (H >Hi)=1-∫2𝐻𝑖
𝐻2𝑒−𝐻𝑖
2 𝐻2̅̅ ̅̅⁄𝐻𝑖
0𝛼𝐻 = 𝑒−𝐻𝑖
2 𝐻2̅̅ ̅̅⁄ (48)
da la probabilidad de que la altura de la ola será mayor que 𝐻𝑖 , o, en otras palabras,
fuera de un número de olas N, habrá N𝑒−𝐻𝑖2 𝐻2̅̅ ̅̅⁄
olas que serán más altas que Hi.
Podemos pasar de esto, a determinar cuál será la altura de la ola media, o la altura
media de un tercio de las olas más altas, o de un décimo de las olas más altas y así
sucesivamente. Por ejemplo:
Altura de la ola media, 𝐻0 = 0,89(�̅�2)1 2⁄
Altura media de un tercio de las olas más altas, 𝐻13⁄
= 1,41(�̅�2)1
2⁄
Altura media de un décimo de las olas más altas, 𝐻110⁄ = 1,80(�̅�2)
12⁄
Es necesario destacar la particular importancia de la altura media del tercio de olas
más altas. Este es idéntico al valor asignado a la altura de la ola significante, la cual
procede del hecho que psicológicamente un observador tiende a despreciar las olas
pequeñas y solamente toma nota de las más grandes.

42
La altura de la ola significante sigue siendo el índice más importante utilizado en
la práctica cuando se trata de informar sobre las condiciones de la mar.
Conviene insistir un poco más sobre la vigencia de la distribución de Rayleigh de sí
y cómo encaja en la teoría estadística general la cual ha sido desarrollada para
determinar la altura de las olas. En primer lugar, las leyes de la estadística indican que la
superficie de la mar debería seguir la clásica distribución normal o gaussiana, es decir,
la probabilidad de que la superficie de la mar en una localización dada, tenga una cierta
elevación podría ser determinada utilizando la distribución normal.
No obstante, esto no nos sirve de mucho ya que principalmente estamos interesados
en la frecuencia y valor de las elevaciones máximas (o mínimas), es decir, de las crestas
y los senos. Una formulación más útil sería entonces la curva envolvente de las
elevaciones máximas de la superficie y, afortunadamente, esto es lo que la distribución
Rayleigh resuelve.
Existe una reserva teórica. La distribución Rayleigh está matemáticamente indicada
para aplicar exactamente sólo a un espectro de banda estrecha (aquel que tiene perfil
altamente puntiagudo con la mayoría de la energía contenida en una banda estrecha de
frecuencias) o para una banda estrecha de un espectro en general. Pero pierde validez
cuando se aplica a un espectro ancho completo o a un espectro con múltiples picos, a
menos que se apliquen ciertos factores correctivos.
Además, solamente son válidas las leyes matemáticas si consideramos la amplitud
de la ola medida por encima o por debajo del nivel de la mar en calma (NMM Nivel
Medio de la Mar). Por eso, la teoría dice que precisamente no podemos deducir las
alturas de las olas (medidas desde la cresta hasta el siguiente seno) a partir de una
distribución dada, ni podemos obtener la distribución apropiada a partir de las medidas
de las alturas de las olas, simplemente porque la probabilidad de que una cresta tenga
una cierta altura sobre el nivel de la mar en calma no está asociada con una probabilidad
igual de que le sigan senos que estarán a la misma distancia pero por debajo de dicho
nivel.
Numerosas pruebas y observaciones indican que la distribución incorrecta de
Rayleigh todavía da una excelente correlación indiferente al perfil del espectro. Por lo
tanto la distribución de Rayleigh da resultados con exactitud suficiente para aplicaciones
de ingeniería y todavía ninguna otra distribución ha demostrado tan consistentes
resultados.
IV.14.3.- APLICACIÓN DE LA DISTRIBUCIÓN DE RAYLEIGH AL
COMPORTAMIENTO DEL BUQUE EN OLAS REGULARES
Con el conocimiento que la distribución de Rayleigh consigue para el espectro de la
ola en un determinado estado de la mar, podría aplicarse, por ejemplo, para obtener el
espectro de la arfada de un buque situado en dicha mar, así como llegar a determinar
otros movimientos del buque y las fuerzas ejercidas sobre él por las olas. Además se
podría aplicar los mismos factores estadísticos al espectro resultante para determinar las
magnitudes de los movimientos o de las fuerzas y sus probabilidades de ocurrencia en
aquellos mares. Todo lo anterior ha sido comprobado por un importante número de
experiencias y análisis de comportamiento.

43
Por lo tanto necesitamos expresar el espectro para el movimiento o para la fuerza
que actúa sobre el buque. Para esto necesitamos:
1. Características de la altura de las olas componentes de diferentes frecuencias que
ocurren en la mar. Estas, por supuesto, se deducen del espectro de la mar en
m2×s.
2. La respuesta individual del buque para cada una de las olas componentes de
frecuencia diferente.
Por ejemplo, Si estamos investigando el movimiento tal como el cabeceo,
necesitamos determinar su ángulo máximo (hacia arriba o hacia abajo) para una ola de
0,5 metros de alto. Esto lo debemos hacer para un número suficiente de olas regulares
de frecuencias seleccionadas (de diferente longitud) correspondientes al margen de
frecuencias dado por el espectro de la mar. Si estamos buscando las fuerzas de las olas
sobre el buque, determinamos la máxima fuerza (más o menos) por cada metro de altura
de ola para un margen similar. La ordenada de la respuesta unitaria será entonces
ángulo de cabeceo/metro de altura, o fuerza/ metro de altura.
Multiplicando la altura de la ola espectral por el cuadrado de la respuesta unitaria (a
la misma frecuencia), obtenemos ordenadas de (ángulo de cabeceo)2×s, o fuerza2×s; y
así sucesivamente, y, marcando estos valores sobre el plano para el margen total de
frecuencias consideradas, obtendremos el espectro del movimiento particular o el de la
fuerza que buscamos.
Entonces podemos proceder como para el espectro mismo de la ola, obteniendo el
área bajo esta nueva curva de espectro y aplicando las mismas constantes de Rayleigh
para obtener un tercio de los movimientos más altos, o un décimo, y así sucesivamente.
Vamos a ilustrar esta técnica de deducción de los espectros de la fuerza y del
movimiento a partir de un espectro de altura de ola significante, figura 16.IV.
Supongamos en primer lugar que queremos encontrar la aceleración vertical de un
pequeño objeto flotante, tal como una balsa, que acompaña a la ola en su movimiento.
La aceleración vertical de las partículas del agua sobre la superficie (y por lo tanto la
misma que la balsa), es la derivada segunda de la ecuación de la ola regular sinusoidal,
es decir:
�̈� = 𝛼 = −ℎ𝜔2
2𝑐𝑜𝑠𝜔𝑡 (𝑚/𝑠2) (49)
donde h es la altura de la ola componente regular de frecuencia ω.
Entonces, la aceleración máxima relativa por metro de altura de ola es:
𝛼 ℎ⁄ =𝜔2
2
Partiendo del espectro de la altura de la ola anotamos el valor de la densidad de
altura de la ola componente (en m2×s) para cada frecuencia.

44
Figura 16.IV
Multiplicando estos valores por el cuadrado de la aceleración relativa (α/h)2, nos da
el valor de la densidad de aceleración a la frecuencia correspondiente. Situando estos
nuevos valores obtenemos el espectro de la aceleración.

45
También, en ciertos casos, podemos tener el espectro de doble pico. Por ejemplo,
con dos balsas rígidamente unidas a cierta distancia y su conjunto sobre la mar,
podemos investigar el ángulo de cabeceo. La ecuación para la amplitud simple del
cabeceo sería:
𝛷 =ℎ
𝑥𝑠𝑒𝑛
𝑥𝜔2
2𝑔𝑠𝑒𝑛𝜔𝑡 (50)
Si x es la separación entre las balsas, alrededor de 115 m y suponemos un ángulo de
cabeceo en grados, obtendremos para el cabeceo máximo por metro de altura de ola:
𝛷 ℎ⁄ = 0,15 𝑠𝑒𝑛(6𝜔2) (51)
y el espectro del cabeceo resulta de doble pico.
De las figuras resultantes del ejemplo anterior se puede deducir la importancia de la
forma del espectro de la altura de la ola, particularmente en relación con el valor de la
máxima densidad y a la frecuencia a la cual ocurre. Cualquier cambio apreciable de los
picos del espectro de la ola, si ello, bien sea causado por un cambio del valor de la
ordenada de la densidad o bien por un cambio de la frecuencia (aún cuando el área
permanezca la misma), cambiaría el perfil del espectro obtenido y, con mayor
importancia, cambiaría su área y, en consecuencia, sus valores máximos.
Por lo tanto, frecuentemente puede ser necesario investigar otras condiciones
utilizando más de una forma del espectro de la ola especificada. Hemos notado que el
perfil puede ser diferente bajo distintas condiciones de viento y puede ser que, para
algunas formas del buque, una mar totalmente desarrollada con relativamente baja
velocidad del viento podría ser crítica, mientras que para otras carenas una mar recién
iniciada por viento de alta velocidad pueda ser peor (aún cuando ambos estados de la
mar puedan producir las mismas alturas de olas).
Se puede comprender que en esta técnica de análisis espectral se recurre al
concepto de ola regular para obtener las funciones de respuesta del buque, pero se deben
aplicar estas características a más condiciones reales de la mar para obtener
predicciones más realistas de las fuerzas y movimientos.
El análisis en olas regulares se puede utilizar para las consideraciones acerca de los
movimientos o fuerzas más simples o para los estudios de una evaluación preliminar,
después de lo cual se puede recurrir a las pruebas con modelos en olas regulares con el
fin de obtener valores más definitivos y exactos.
IV. 15.- EL OLEAJE COMO PROCESO ESTADÍSTICO
En el análisis expuesto a continuación se comparan, por una parte, los resultados
obtenidos a partir de diferentes espectros de energía para oleaje totalmente
desarrollado, y, por otra parte, los resultados obtenidos por diferentes métodos de
previsión de oleaje parcialmente desarrollado para valores crecientes del fetch.
Previamente se hace una somera revisión de lo que es un espectro de energía de oleaje
contemplando éste como un proceso estocástico.
46
El estudio del proceso del oleaje se basa en las definiciones y consideraciones
siguientes:
IV. 15. 1.- PROCESO ESTOCÁSTICO
Las secuencias (conjunto de cosas que se suceden unas a otras y guardan relación
entre sí) caracterizadas por propiedades estadísticas son llamadas procesos
estocásticos. Son la abstracción matemática de un proceso empírico, cuyo desarrollo se
encuentra gobernado por leyes de probabilidad.
Se considera al oleaje como un proceso estocástico debido a que la elevación de la
mar en un punto determinado es un evento aleatorio y el resultado no es un número sino
una función ζ(t), que satisface las condiciones de estacionalidad, ergodicidad y de una
función gaussiana.
Si se observa, la elevación de la superficie durante un instante determinado ti, ζ(t) es una variable aleatoria. Si tomamos n instantes, t1,t2,t3…tn; se puede hablar de la
variable aleatoria n-dimensional
ζ (t1,t2,t3,…tn)=[ζ(t1), ζ(t2)…ζ(tn)] (52)
Pues bien, el proceso ζ(t) puede considerarse definido para cualquier instante
t1,t2,t3…tn si se conoce la función de distribución, cuyo resultado debe satisfacer las
siguientes condiciones:
Condición de simetría, la cual permite que las características de la distribución de
probabilidades sean equivalentes aunque exista un orden aleatorio en la muestra.
Condición de compatibilidad, que permite calcular las variables aleatorias a partir
de una muestra finita. Si se supone un universo compatible, entonces todos los
valores del universo concurren dentro de la muestra.
Para tener definido el proceso ζ(t),sería necesario conocer todas las funciones de
distribución de la ecuación (52) para cualquier valor de n. Sin embargo, el estudio de
estos procesos suele simplificarse mediante la llamada teoría de correlación, que se
define mediante los siguientes conceptos:
El valor medio
La teoría de correlación (o autocorrelación)
Aunque las expresiones del valor medio y de la función de correlación no
especifican totalmente el proceso ζ(t),ésta, es actualmente una teoría suficientemente
desarrollada para permitir aplicaciones prácticas. Además, se vuelve más precisa si se
toma en cuenta el hecho de que los procesos que se encuentran en la práctica son, por lo
común, normales (Gaussianos).
En este caso, para variaciones normales de la superficie libre del agua, ζ(t), se
acepta que el valor medio y la función de correlación definen completamente el
proceso.

47
A pesar de que pueda considerarse y aplicarse la teoría de correlación, el problema
es todavía complejo. Con objeto de simplificar el estudio del proceso estocástico, ζ(t), que constituye el oleaje a un nivel de complejidad abordable técnicamente, es necesario
asumir dos importantes hipótesis estadísticas: el oleaje como proceso estacionario y el
oleaje como proceso ergódico.
IV. 15. 2.- PROCESO ESTACIONARIO
La condición de estacionalidad se refiere a que las propiedades estadísticas de las
series temporales (muestras), obtenidas de registros de oleaje, no cambian durante un
periodo determinado; es decir, son invariables en el tiempo y no evolutivas.
Por ejemplo, un proceso ∅(t), es estacionario si todas las funciones de distribución
de dimensión finita que definen el proceso, permanecen sin cambio alguno al trasladar
el grupo completo de puntos t1,t2…tn a lo largo de un eje de tiempos, con un intervalo
cualquiera de tiempo.
Un fenómeno físico puede considerarse estacionario si las condiciones externas que
influyen en él permanecen constantes durante un cierto tiempo. En el caso del oleaje, se
le denomina estado de la mar.
Durante dicho tiempo, debido a la inercia del fenómeno, existe un cierto equilibrio
entre las fuerzas que intervienen en el proceso (fuerzas generadoras y restauradoras,
figura 1.IV) cuya manifestación permanece estacionaria. Es decir, es admisible la
estacionalidad del proceso ζ (t).
IV. 15. 3.- PROCESO ERGÓDICO
Un proceso ergódico es aquel en que cada muestra (de un conjunto suficientemente
grande) es igualmente representativa de la totalidad del conjunto (considerado como
un parámetro estadístico).
En general, para estimar el valor medio y la función de correlación de un proceso
estocástico estacionario, se deberá tomar un gran número de muestras o realizaciones y
a partir de ellas estimar la media y la función de correlación.
La hipótesis de ergodicidad aplicable a la mayor parte de los procesos estacionarios
que se encuentran en la práctica, permite calcular el valor medio y la función de
correlación a partir de una sola realización. En el proceso ergódico cada muestra de
oleaje es igualmente representativa del conjunto de ellas.
IV. 16.- EL OLEAJE COMO PROCESO ESTOCÁSTICO
El registro de los desplazamientos de la superficie libre de la mar en un punto, a lo
largo del tiempo, tendrá un aspecto como el de la figura 17.IV. En ella se han
representado los términos más significativos que sirven para definir las oscilaciones de
corto periodo (uno a treinta segundos) de la superficie libre de la mar:
NMM = Nivel Medio de la Mar.
H(t)= Altura de ola, distancia en vertical entre una cresta y el seno consecutivo.

48
ζ (t)= Desplazamiento de la superficie del agua con respecto al NMM
ξ (t)= Desplazamiento máximo o cresta. Puede ser positivo ξ1 o negativo ξ2.
a = Amplitud de la ola.
Tz= Periodo de paso por cero. Se obtiene dividiendo la duración total del registro
por el número de pasos de la superficie libre por el NMM
Tc= Periodo medio de cresta Se obtiene dividiendo la duración total del registro por
el número de crestas presentes en él.
Figura 17. IV
En general, dichos desplazamientos, ζ (t), presentarán una apariencia caótica.
Medido un desplazamiento determinado, no se puede decir cuál le va a seguir, por lo
que estos desplazamientos no pueden ser predichos antes de su presentación. La
superficie libre presenta una apariencia cuasi-caótica cuando el oleaje ha abandonado el
área de generación y se propaga por la zona costera. Aún en estos casos el modelo
periódico de la superficie libre (onda senoidal, trocoidal etc.) da una lejana
representación de la realidad, que no es matemáticamente utilizable ni conserva el
carácter aleatorio de la oscilación.
Medidos los desplazamientos de la superficie libre durante un cierto tiempo Tr, el
registro constituirá una función muestral ζ (t). Si se conservan todas las condiciones que
afectan a la generación de estos desplazamientos, transcurrido otro intervalo Tr, se habrá
recogido otra muestra ζ1 (t) ≠ ζ (t).
El conjunto de todas las muestras o funciones muestrales posibles {휁 (𝑡)}, es el
espacio muestral del proceso estocástico, es decir, los desplazamientos de la superficie
libre de la mar de corto periodo, ζ (t).
Se dice entonces, que el proceso estocástico representa un estado de la mar.
El valor de la función muestral en un instante t1, será una variable aleatoria ζk (t1).
Los valores de ζk (t1), desde k=1 hasta n, constituyen un conjunto de n valores, de los
cuales se pueden obtener los parámetros estadísticos que los representan mediante los
criterios clásicos de la estadística tales como media, desviación típica, etc.
Si estos parámetros estadísticos no dependen del tiempo t1 elegido, se dice que el
proceso es estacionario. En lo que sigue se considera exclusivamente este tipo de
procesos.
Los parámetros estadísticos temporales que definen la función muestral, ζk (t),
vienen dados por:

49
< 휁ℎ𝑛 >= lim
𝑇𝑟→∞
1
𝑇𝑟∫ [휁𝑘(𝑡)]
𝑛𝑑𝑡𝑇𝑟
0 (53)
La media muestral temporal <ζ> y el valor medio cuadrático temporal<ζ2> se
obtienen respectivamente para los valores de n= 1 y n=2. La varianza temporal de la
función muestral se define como:
𝜎𝑘2 = lim
𝑇𝑟→∞
1
𝑇𝑟∫ [휁𝑘(𝑡) − 휁𝑘]
2. 𝑑𝑡𝑇𝑟
0 (54)
Se define como función de autocorrelación temporal de la función muestral a:
𝑅𝑘(𝜏) = lim𝑇𝑟→∞
1
𝑇𝑟∫ 휁𝑘(𝑡). 휁𝑘(𝑡 + 𝜏). 𝑑𝑡
𝑇𝑟
0=< 휁𝑘(𝑡). 휁𝑘(𝑡 + 𝜏) > (55)
La función de autocorrelación 𝑅𝑘(τ) proporciona una medida promediada de cómo
el desplazamiento de la superficie en el instante t, influye en el desplazamiento de la
superficie en el instante t + τ.
Cuando τ = 0:
𝑅𝑘(0) =< 휁𝑘(𝑡). 휁𝑘(𝑡) >=< 휁2 > (56)
Si los parámetros estadísticos < 휁𝑛 > obtenidos de las funciones muestrales
휁1(𝑡), 휁2(𝑡),… , 휁𝑘(𝑡) son iguales, aquéllos no dependen del intervalo 𝑘. 𝑇𝑟del que han
sido medidos, y, por tanto, no son independientes de la muestra k; se dice entonces que
el proceso es ergódico y los parámetros calculados de cualquier función muestral
representan al proceso estocástico {휁(𝑡)}, y en consecuencia, al estado de la mar.
En régimen permanente, como se ha supuesto hasta ahora, el tiempo de registro, Tr,
es finito, mientras que, a fin de que la muestra sea representativa de la realidad, Tr debe
tender a infinito. Estas dos condiciones se contraponen, adoptándose en la práctica
soluciones de compromiso, las cuales no pueden ser generalizadas. La descripción de un
estado de la mar a partir de un único registro 휁𝑘(𝑡), se basa en admitir que el proceso
estocástico es estacionario y ergódico.
Se define como transformada de Fourier de una función, en este caso, de la función
de autocorrelación R (ζ) a:
𝑆(𝜔) = ∫ 𝑅(𝜏)+∞
−∞𝑒+𝑖𝜔𝜏𝑑𝜏 (57)
Y su inversa:
𝑅(𝜏) =1
2𝜋∫ 𝑆(𝜔)𝑒−𝑖𝜔𝜏𝑑𝜔
+∞
−∞ (58)
Estas ecuaciones se conocen con el nombre de relaciones de Wiener-Khintchine.
Teniendo en cuenta las expresiones (56) y (58), se puede escribir:
𝑅(0) =1
2𝜋∫ 𝑆(𝜔)𝑑𝜔 =< 휁2(𝑡) >
+∞
−∞ (59)

50
Es decir, que el área bajo la curva S(ω)/2π es igual al valor medio cuadrático de la
función muestral ζ(t). Admitiendo que la función S(ω) es simétrica respecto al eje ω =
0, de la ecuación (58) se obtiene:
𝑅(𝜏) =1
𝜋∫ 𝑆(𝜔) cos𝜔𝜏𝑑𝜔
∞
0 (60)
y de la (59):
𝑅(0) =1
𝜋∫ 𝑆(𝜔)𝑑𝜔
∞
0 (61)
Se definen como momentos espectrales de la función S(ω) a:
𝑚𝑛 =1
(2𝜋)𝑛+1 ∫ 𝜔𝑛𝑆(𝜔)𝑑𝜔 = ∫ 𝑓𝑛𝑆(𝑓)𝑑𝑓∞
0
∞
0 (62)
con ω = 2πf
Es útil definir un parámetro que indique, de manera cualitativa, las frecuencias que
tienen energía en el espectro S(ω). Este parámetro, llamado ancho de banda de
espectro, y designado por ε, queda determinado por la siguiente expresión:
휀2 = 1 −𝑚2
2
𝑚0.𝑚4 (63)
Cuando el espectro es de banda estrecha ε = 0, mientras que para espectros de
oleajes con todas las componentes con energía, ε = 1.
IV.17.- MODELO ESPECTRAL DEL OLEAJE
Longuet-Higgins (1952) y Pierson-Marks (1952) propusieron que un registro de los
desplazamientos ζ (t) de la superficie libre de la mar con respecto a un nivel de
referencia, el NMM, puede ser representado como una suma de un gran número de
ondas senoidales (onda de Airy), cada una de ellas de altura y frecuencia diferentes, con
fase aleatoria, es decir:
휁(𝑡) = ∑ 𝑎𝑖(𝑓) cos(2𝜋𝑓𝑖𝑡 − 𝛽𝑖)𝑖 (64)
con:
0 ≤ 𝑓𝑖 ≤ ∞
0 ≤ 𝛽𝑖 ≤ 2𝜋
prob. (0 ≤ 𝛽𝑖 ≤ 2𝜋) = 1
En este modelo se puede ver que el valor medio del desplazamiento < ζ (t) > es
igual a cero. Al ser cada onda componente independiente se verificará:
< 𝜉(𝑡)(𝑡 + 𝜏) > ≠ 0 (65)
< 𝜉(𝑡)2 >≠ 0 (66)

51
< 𝜉(𝑡)2 > =1
2∑ 𝑎𝑖
2 = 𝑅(0)𝑖 (67)
De la ecuación (67) se obtiene:
< 𝜉(𝑡)2 > =1
2∑ 𝑎𝑖
2 =1
𝜋∫ 𝑆(𝜔)𝑑𝜔
∞
0𝑖 (68)
Ya que la energía total por unidad de longitud de oleaje viene dada por la
expresión de Kinsman (1967) 1 2⁄ 𝜌𝑔 ∑ 𝑎𝑖2
𝑖 , teniendo en cuenta las ecuaciones (67) y
(68) se puede deducir:
𝜌𝑔 < 휁(𝑡)2 > = 𝜌𝑔
2∑𝑎𝑖
2 = 𝜌𝑔𝑅(0) =
1
𝜋𝜌𝑔 ∫ 𝑆(𝜔)𝑑𝜔 = 2𝜌𝑔 ∫ 𝑆(𝑓)𝑑𝑓
∞
0=
∞
0𝜌𝑔𝐸 (69)
de donde:
𝐸 = 2∫ 𝑆(𝑓)𝑑𝑓∞
0 (70)
Figura 18.IV
De la expresión (69) se deduce que 1
𝜋𝜌𝑔𝑆(𝜔)∆𝜔 , proporciona la cantidad de
energía que las componentes de frecuencia comprendidas entre ω, ω + ∆ω aportan al
proceso. De aquí que a la función S(ω) o a la S(f) se le conozca con el nombre de
espectro de energía, lo cual sólo es correcto si se multiplica S(ω)∆ω × ρg/ π (o S(f)∆t
× 2ρg).
Cuando la función de densidad espectral S(f) es de la forma:
S (f) = S0 (f). δ. (f – f m) (71)
es decir, es una función delta de Dirac teniendo el valor S(0) en f = f m, los
desplazamientos ζ(t) son del tipo de la figura 18.IV, en la que se representa los
desplazamientos de la superficie libre de la mar para un espectro de banda estrecha, los
cuales tienen una frecuencia dominante de oscilación alrededor de fm. Bajo estas
condiciones Longuet-Higgins (1952) demostró que la función de densidad de los
máximos desplazamientos, ξ, viene dada por la función de Rayleigh, siempre que la
función de densidad de los desplazamientos ξ sea gaussiana:

52
𝑓(𝜉) =𝜉
𝑚0𝑒
− 𝜉2
2𝑚0 ξ ≥0 (72)
𝑓(𝜉) = 0 𝜉 < 0
donde:
𝑚0 = ∫ 𝑆(𝑓)𝑑𝑡 = 𝑆0 = 𝐸 2 ⁄∞
0 (73)
El parámetro más utilizado en ingeniería es el de la altura de la ola H, definida
como la distancia desde la cresta al próximo seno. El modelo anterior puede ser
aplicado a la altura de ola, considerando el proceso estocástico H(t), válido para el caso
de espectro de banda estrecha, definido por:
H(t) = 2 a(t) (74)
La función de densidad de la altura de ola viene dada (Longuet-Higggins, 1952)
entonces por:
𝑝(𝐻) = 𝑓(𝐻) =𝐻
4𝑚0𝑒
− 𝐻2
8𝑚0 (75)
De las ecuaciones (73) y (75) se pueden obtener (Longuet-Higgins, 1952) las
siguientes relaciones:
�̅�𝑚 = 2√𝐸
�̅�𝑠 = 2,83√𝐸 (76)
�̅�1/3 = 3,592√𝐸
y las siguientes expresiones asintóticas de las alturas máximas:
𝐻𝑚á𝑥.𝑁=�̅�𝑚 {(𝐿𝑁)1
2⁄ + 0,2886(𝐿𝑁)1
2⁄ } 𝑝𝑎𝑟𝑎 𝑁 ≥ 100
�̂�𝑚á𝑥.𝑁 = �̅�𝑚(𝐿𝑁)1
2⁄ 𝑝𝑎𝑟𝑎 𝑁 ≥ 100
donde en un registro de N olas:
�̅�𝑚 es la media cuadrática de las alturas de ola. Para N alturas: 𝐻𝑚 = √1
𝑁∑ 𝐻𝑖
2𝑁𝑖=1 = 𝑅𝑀𝑆
�̅�𝑠es la altura de ola significante, es decir, la media del tercio de olas más altas.
�̅�1/10 es el valor medio del décimo de olas más altas.
�̅�𝑚á𝑥N es el valor medio de la altura de ola máxima.
�̂�𝑚á𝑥.𝑁 es la moda de la altura de ola máxima = valor máximo con mayor frecuencia
La ecuación (75) puede expresarse, de acuerdo con la expresión (76):
𝑝(𝐻) =2.𝐻
𝐻𝑚2 𝑒
−(𝐻 𝐻𝑚⁄ )
2

53
Longuet-Higgins y Cartwright (1956) obtuvieron la función de densidad de los
desplazamientos máximos ξ para el caso general 0 ≤ ε ≤ 1 cuando los desplazamientos ζ
se ajustan a una ley de Gauss y la función de densidad espectral abarca todo el campo
de frecuencias (0, ∞). La función de densidad de los máximos ξ es una función de Gauss
cuando ε = 1, degenerando en una ola de Rayleigh cuando ε= 0.
No se conoce la función de densidad de las amplitudes de ola, a, o de las alturas de
ola H, de una función muestral cuyo espectro de energía tenga ε ≠ 0. Ello obliga a
utilizar la solución obtenida por Longuet-Higgins para el caso de espectro de anchura
reducida, teóricamente nula, para cualquier estado de la mar.
Admitiendo la hipótesis anterior y conociendo el espectro de energía del oleaje, es
posible calcular los parámetros estadísticos para cualquier estado de la mar, tales como
Hs, H1/10, 𝐻𝑚á𝑥.𝑁, a partir de las ecuaciones (75) y (76).
El siguiente paso será, por tanto, estudiar los espectros de energía experimentales
más conocidos, comparando los valores de Hs y fm que de ellos se obtienen.
El espectro de energía o función de densidad espectral S(f) tal y como se ha
obtenido, tiene sus ordenadas proporcionales a la mitad del cuadrado de la amplitud, ai,
de las ondas componentes. En este caso, la energía total del registro viene dada por:
𝐸 = 2. ∫ 𝑆(𝑓)𝑑𝑓 = 2𝑚0∞
0 (77)
A veces se suelen definir las ordenadas de la función de densidad de manera que
sean proporcionales al cuadrado de la amplitud, ai, de las ondas componentes,
denominándose entonces el espectro, espectro de amplitud, SA. En el caso que las
ordenadas sean proporcionales al cuadrado de la altura de onda de las componentes, se
denomina espectro de altura SII. Por último, a veces, se suele definir el espectro doble
de altura S2II, en el cual las ordenadas son proporcionales al doble del cuadrado de la
altura de ola.
Ya que la energía contenida en el registro ha de ser igual en todas las definiciones,
se pueden obtener las siguientes relaciones:
𝑚0 = ∫ 𝑆(𝑓)𝑑𝑓∞
0
= 𝐸/2
(𝑚0)𝐴 = ∫ 𝑆𝐴(𝑓)𝑑𝑡 = 2𝑚0
∞
0
= 𝐸
(𝑚0)𝐼𝐼 = ∫ 𝑆𝐼𝐼(𝑓)𝑑𝑓 = 8𝑚0 = 4𝐸∞
0
(𝑚0)2𝐼𝐼 = ∫ 𝑆2𝐼𝐼(𝑓)𝑑𝑓 = 16𝑚0 = 8𝐸∞
0 (78)
𝐻𝑠 = 4√𝑚0 𝐻𝑚 = 2,83√𝑚0
𝐻𝑠 = 2,83√(𝑚0)𝐴 𝐻𝑚 = 2√(𝑚0)𝐴
𝐻𝑠 = 1,42√(𝑚𝑜)𝐼𝐼 𝐻𝑚 = √(𝑚0)𝐼𝐼
𝐻𝑠 = √(𝑚0)2𝐼𝐼 𝐻𝑚 = 0,71√(𝑚0)2𝐼𝐼 (79)

54
La formulación espectral se da generalmente como espectro de energía, es decir,
aquella en la que las ordenadas son proporcionales a la mitad de la amplitud. En este
caso:
𝐻𝑠 = 4√𝑚0
𝐻𝑚 = 2,83√𝑚0
𝐻10 = 5,08√𝑚0 (80)
IV. 18.- ANCHO DE BANDA DE UN ESPECTRO
En la figura 19. IV se representan las evoluciones de dos olas irregulares en
relación con el tiempo. Los espectros de energía correspondientes a estas olas son los de
la figura 19. IV (a).
Figura 19.IV
Figura 19. IV(a)

55
Analizando el registro de banda estrecha se podría describir como una onda seno
de amplitud variable, cuya energía está concentrada en una banda estrecha de
frecuencias, sin que exista apenas energía en otras frecuencias. Un pico es casi siempre
seguido, en sucesión ordenada, por un cruce por cero hacia abajo, un seno, un cruce por
cero hacia arriba y de nuevo otro pico. Los picos por debajo del nivel de referencia
(NMM) son poco frecuentes y se deduce que el período promedio de los picos es casi el
mismo que el período promedio de cruce por cero.
El registro de banda ancha contiene la energía a través de una banda de frecuencias
más ancha como se muestra en la figura 19.IV(a). En este caso hay muchos picos y
senos que no son seguidos inmediatamente de cruces por cero y el periodo medio de los
picos es mucho menor que la media del periodo de cruces por cero. Hay muchos picos
por debajo del nivel de referencia (NMM) y muchos senos por encima de dicho nivel.
La relación entre el periodo medio de los picos 𝑇𝑝 y la media del periodo de cruce
por cero 𝑇𝑧 puede adoptarse como una medida de la estrechez de banda del registro y
su espectro de energía de onda.
De la expresión (63) se obtiene:
휀2 = 1 −
𝑚2𝑚4𝑚0𝑚4
= 1 −𝑇𝑝
2
𝑇𝑧2 de donde 𝑇𝑝
2 = 𝑇𝑧2(1 − 휀2) (81)
Los valores de ε están comprendidos entre 0 y 1, correspondiendo al valor cero a
un espectro de ancho de banda muy estrecho (�̅�𝑝 = �̅�𝑧). El al valor de ε igual a uno
corresponde a un espectro de muy amplio ancho de banda(�̅�𝑝 = 0)
El registro correspondiente a 휀 = 0 sería el de una ola regular de una sola
frecuencia y el espectro estaría representado por una recta sobre dicha frecuencia, donde
estaría concentrada toda la energía. Para dicho valor de 휀 = 0 se acostumbra a suponer
que los espectros asociados con las olas y los movimientos del buque son de banda
estrecha.
Para valores de ε próximos a uno el registro sería irregular y su espectro tendría
ordenadas distribuidas en una gama ancha de frecuencias.
Cartwright y Longuet-Higgins (1956) (apartado IV.18) demostraron que la altura de
la ola significante se puede relacionar con el área bajo el espectro de energía de la ola
mediante la ecuación:
�̅�1/3 = 4,00√𝑚0√1 −𝜀2
2 𝑚 (82)
Si 휀 = 0 se reduce a:
�̅�1/3 = 4,00√𝑚0 = 4,00√∫ 𝑆𝜁(𝜔)𝑑𝜔∞
0 𝑚 (83)
De donde se establece que la altura de la ola significante se puede estimar
integrando el espectro de energía de la ola.

56
IV. 19.- PREDICCIÓN DE MAR IRREGULAR
Es conveniente predecir las características de un oleaje a partir de los datos
relativos al viento.
Para definir el estado de la mar real es necesario registrar los datos de las alturas de
las olas y su frecuencia en un periodo limitado de tiempo y en una determinada zona.
Aunque el perfil de la ola no se repetirá, las características estadísticas del estado de la
mar como el espectro de energía y el espectro de la ola, permanecerán constantes en
una zona concreta. La densidad espectral de la ola, es decir, la cantidad de energía total
de las olas componentes se puede expresar por:
𝑺𝜻(𝝎𝒊) =𝟏
𝟐⁄ ∑ 𝜻𝒂𝟐𝝎
𝟎
𝜟𝝎 (84)
Figura 20.IV
En la figura 20.IV está representada una curva de densidad espectral, asintótica con
el eje de abscisas.
El área bajo la curva de densidad espectral es:
𝒎𝟎 = ∫ 𝑺(𝝎). 𝒅𝝎∞
𝟎 m2 (85)
O bien
𝒎𝟎 =𝟏
𝟐𝒏. ∑ 𝜻𝒏
𝟐 =𝟏
𝟐𝒏
∞𝟎 . (𝜻𝒂𝟏
𝟐 + 𝜻𝒂𝟐𝟐 + ⋯+ 𝜻𝒂𝒏
𝟐 ) (86)
Tanto el espectro de energía como la densidad espectral no siguen una ley
gaussiana como lo hace la amplitud de la ola. Para usar los principios de espectro de ola
o densidad espectral hay que conocer los valores cuantitativos del espectro de ola para
cada zona de los mares.
Conociendo la densidad espectral se puede determinar la altura de ola significante:
�̅�1/3 = 𝟒,𝟎. √𝒎𝟎 (87)

57
La constante 4,0 se obtiene de la aproximación matemática dada por la distribución
de Rayleigh. Del espectro de ola se puede conocer:
1. El rango de frecuencias que son importantes por su contribución energética en el
estado de la mar.
2. La frecuencia que aporta la máxima energía.
3. El contenido energético de las diversas bandas de frecuencia.
4. La existencia de oleaje de baja frecuencia.
Como la densidad espectral o espectro de la ola siempre es constante para una
determinada zona, se puede representar un estado concreto de la mar en el espectro de la
ola que contemple todos los estados posibles de la mar. La ecuación (44) que expresa la
energía total de la superficie de la mar, se escribirá, por unidad de superficie:
𝑬 = 𝝆𝒈𝒎𝟎 (88)
siendo m0 el área encerrada por la curva de densidad espectral, figura 20. IV. Conocido
dicho valor, podemos obtener los valores promedio de amplitud y altura de la ola, así
como los valores significantes. Por lo tanto, el valor de un pico tal que el número de
picos mayores que el dado sea 1/N (Rayleigh) es:
𝜻𝟏𝑵⁄
= √𝟐𝒎𝟎𝐥𝐧 𝑵 (89)
En la Tabla IV se expresan los valores promedio y significante de �̅� y �̅�:
TABLA IV
AMPLITUD DE OLA ALTURA DE OLA
OLA PROMEDIO �̅� = 𝟏, 𝟐𝟓√𝒎𝟎 �̅� = 𝟐,𝟓√𝒎𝟎
OLA SIGNIFICANTE �̅�𝟏𝟑⁄
= 𝟐,𝟎√𝒎𝟎 �̅�𝟏/𝟑 = 𝟒,𝟎√𝒎𝟎
Para tomar alturas de olas es necesario que el intervalo de tiempo sea menor que el
tiempo de paso entre crestas, es decir, el periodo menor a registrar.
Como las constantes anteriores se han obtenido de la distribución teórica de
Rayleigh y nosotros realmente trabajamos con valores obtenidos de la estimación de la
amplitud o altura de la ola, se puede cometer un error considerable si el ancho de banda
elegido es elevado. Para evitar dicho error se introduce un factor de corrección CF:
𝑪𝑭 = √𝟏 − 𝜺𝟐 =𝑵ú𝒎𝒆𝒓𝒐 𝒅𝒆 𝒑𝒂𝒔𝒐𝒔 𝒑𝒐𝒓 𝒄𝒆𝒓𝒐
𝑵ú𝒎𝒆𝒓𝒐 𝒅𝒆 𝒑𝒖𝒏𝒕𝒐𝒔 𝒄𝒓𝒆𝒔𝒕𝒂𝒔 𝒐 𝒔𝒆𝒏𝒐𝒔 (90)
Los momentos de diverso orden sobre el área de la densidad espectral, se definen
por:
𝒎𝒏 = ∫ 𝝎𝒏∞
𝟎. 𝑺(𝝎𝒘). 𝒅𝝎𝒘 (91)
Siendo n un número entero que define el orden del momento en consideración. El valor
de ε varía entre 0 y 1, en función del ancho de banda tomado en los registros. Cuando el

58
espectro es de banda ancha entonces ε=1. En general, los factores que determinan la
forma del espectro de ola, son:
Velocidad del viento
Duración del viento
Superficie de la mar afectada (fetch2)
Otros factores
También se puede obtener el número de pasos por cero (respecto a la NMM) por
unidad de tiempo de la amplitud de la ola, en función de los momentos de la densidad
espectral o espectro de la ola:
𝑵𝟎 =𝟏
𝟐𝝅. √
𝒎𝟐
𝒎𝟎 (92)
Su inversa es:
𝑻𝒛 =𝟏
𝑵𝟎= (
𝟏
𝟐𝝅. √
𝒎𝟐
𝒎𝟎)−𝟏
(93)
Y el periodo de cresta como:
𝑻𝒄 = 𝟐𝝅.√𝒎𝟐
𝒎𝟒 (94)
Figura 21. IV
Tc es normalmente menor que Tz y este último no contempla la existencia de rizado
en la ola:
𝑻 = 𝟐𝝅.𝒎𝟎
𝒎𝟏 (95)
Tz es el parámetro más adecuado para determinar el periodo del oleaje. La longitud
de onda aparente, basada en el paso por cero, se obtiene por la siguiente expresión:
𝝀𝝎𝒛 = 𝟐𝝅𝒈√𝒎𝟎
𝒎𝟒 (96)

59
Y la basada en la máxima:
𝝀𝝎𝒛 = 𝟐𝝅𝒈√𝒎𝟒
𝒎𝟖 (97)
La figura 21. IV es un ejemplo que muestra un registro de la elevación de las olas
en un punto fijo, en el cual se tienen 11 pasos por cero y 15 crestas y senos, de donde se
deduce que el factor de corrección (CF) es el cociente 11/15 = 0,733 es decir:
√𝟏 − 𝜺𝟐 = 𝟎,𝟕𝟑𝟑; 𝟏 − 𝜺𝟐 = 𝟎, 𝟓𝟑𝟖; 𝜺 = 𝟎, 𝟔𝟖 (98)

60
5.- EVOLUCIÓN DE LAS FÓRMULAS QUE
CARACTERIZAN LOS ESPECTROS DE LA MAR
IV. 20.- INTRODUCCIÓN
Con objeto de aplicar el análisis espectral a la ingeniería, necesitamos conocer los
valores cuantitativos del espectro de la ola para diferentes zonas de los océanos y para
los diferentes vientos o condiciones estacionales.
Durante muchos años los científicos han venido proponiendo diversas fórmulas
para el espectro de las olas. A medida que se obtuvieron más datos, se fueron
modificando dichas fórmulas, desechando algunas y creando otras nuevas.
Todavía existen diferencias significativas entre los valores obtenidos por las
fórmulas propuestas por distintos autores, principalmente por las causas siguientes:
Los diversos métodos utilizados para la toma de datos.
Las diferencias en la terminología utilizada.
Las diferentes notaciones empleadas.
Las diferencias entre los parámetros utilizados para las ordenadas de las curvas
espectrales.
Los diferentes sistemas de unidades empleadas (Inglesas y las del S.I.).
Sin embargo, estas fórmulas son, por ahora, la mejor herramienta disponible para la
determinación de los espectros de la mar.
En relación con el valor de la ordenada de la curva denominada densidad espectral
se considera que, al estar la energía de las olas componentes íntimamente relacionada
con el cuadrado de sus alturas, la densidad espectral se puede referir directamente a
dicha magnitud, es decir, se puede elegir como ordenada el cuadrado de la altura, H2.
Como el área bajo la curva es equivalente a la media cuadrática bajo la curva de
Rayleigh entonces, la altura significante es:
�̅�𝑠 = √2 × á𝑟𝑒𝑎.
Para los Ingenieros Navales y Oceánicos es recomendable utilizar como ordenada
el doble del cuadrado de la altura, 2𝐻𝑠2, la cual tiene la gran ventaja de que la raíz
cuadrada del área bajo la curva, da la altura de la ola significante directamente sin
ningún factor multiplicador:
�̅�𝑠 = √á𝑟𝑒𝑎.
Con respecto a la abscisa, es preferible utilizar la frecuencia en la forma 𝜔 = 2𝜋𝑇⁄
en lugar de f = 1/T ya que es el factor que figura en la ecuación básica de la ola
sinusoidal 𝑦 = 𝐻2 ⁄ cos𝜔𝑡 y todos los movimientos del buque y las funciones de fuerza
de la ola se deducen de esta base.

61
IV.21.- ESPECTROS DE ENERGÍA DEL OLEAJE
El espectro de energía del oleaje de un estado de la mar que se presenta en un
punto, será función de las siguientes variables:
Frecuencia, f.
Viento, definido por la velocidad media �̅�𝑧 y su dirección θ.
Fetch F, considerado éste como superficie.
Duración t de la acción del viento.
Dispersión radial y angular de componentes D.
Decadencia (decay), R, longitud recorrida por el oleaje desde el frente del
fetch hasta el punto de previsión a expensas de su propia energía.
Acción del fondo
La expresión general de la ordenada espectral de energía de oleaje será, por tanto:
𝑆 = 𝑆(�̅�𝑧 , 휃, 𝐹, 𝑡, 𝑑, 𝐷, 𝑓, 𝑅) (99)
Si se considera que el punto se encuentra dentro del área de generación y en
profundidades indefinidas, la expresión de la ordenada espectral de energía en él será:
𝑆 = 𝑆(�̅�𝑧 , 휃, 𝐹, 𝑡, 𝑓) (100)
Salvo en casos muy particulares, Longuet-Higgins (1963) y otros, estiman que las
medidas del oleaje no recogen direcciones, lo que unido a que el fetch F y el tiempo t de
generación, están asociados por la velocidad de transmisión de energía, simplifica la
ecuación de los espectros experimentales, siendo dicha ecuación:
𝑆 = 𝑆(�̅�𝑧 , 𝐹, 𝑓) (101)
De los espectros de energía obtenidos de medidas experimentales se deben
distinguir aquellos que simultáneamente midieron el fetch o, al menos lo estimaron
(generalmente de las cartas meteorológicas), y aquéllos que consideraron que el oleaje
estaba totalmente desarrollado, y, por lo tanto, su expresión no depende del fetch.
Entre los primeros se encuentran Darbyshire (1955), Bretschneider (1959),
JONSWAP (1973), Mitsuyasu (1970, a 1974). La expresión del espectro de energía se
corresponderá con la ecuación (101). Dentro de los segundos se encuentran, entre otros,
Darbyshire (1953), John von Neumann (1953), Roll-Fisher (1956), Pierson-Moskowitz
(1964). En este caso el espectro queda definido en función de la frecuencia f y la
velocidad del viento �̅�𝑧, es decir:
𝑆 = 𝑆(�̅�𝑧 , 𝑓) (102)
Un método de previsión de oleaje de la escuela espectral sirve, entonces, para
estimar el espectro de energía en una zona cualquiera de la mar a partir de un espectro
de energía del tipo de la ecuación (102) obtenido de medidas experimentales. El método
de previsión, por lo tanto, deberá cuantificar las modificaciones que sufrirá el espectro
inicial por los efectos de:

62
Variación del campo de vientos en dirección y velocidad.
Configuración del fetch.
Dispersión angular y radial.
Decadencia (decay).
Acción del fondo.
Debido a este procedimiento de evaluación de los factores que influyen en el
espectro, los métodos de previsión existentes pueden ser utilizados con seguridad dentro
de un rango de variación de velocidades de viento, siempre que se desee conocer un
orden de magnitud del oleaje que se puede presentar en una zona.
Cuando se necesite una mayor precisión, es imprescindible homologar el método
para el punto de previsión mediante una campaña de medidas de corta duración.
IV.22.- ESPECTROS DE ENERGÍA DEL OLEAJE DEL TIPO 𝑆 = 𝑆(�̅�𝑧 , 𝐹, 𝑓)
Existen varias formulaciones de espectros de energía de oleaje con la forma de este
tipo. De entre ellos veremos:
El espectro Bretschneider (1959)
El espectro JONSWAP (Joint North Sea Wave Project) (1973)
IV.22.1.- EL ESPECTRO BRETSCHNEIDER
Cuando no se conoce la ordenada espectral de ola de una mar en particular, se debe
utilizar la formulación Bretschneider o ITTC (International Towing Tank Conference):
𝑆(𝜔𝑛) =𝐴
𝜔𝑤5 𝑒
− 𝐵
𝜔𝑤4
m2/(rad/s) (103)
Siendo, en unidades del sistema S.I:
𝐴 = 8,11. 10−3. 𝑔2 𝑚2/𝑠4(𝐶𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒 𝑑𝑒 𝑃ℎ𝑖𝑙𝑖𝑝) 𝑦 𝐵 =3,11
𝐻1/32 𝑚−2
Se define como periodo modal del espectro, T0, al correspondiente a la frecuencia
ω0 de pico, la cual tiene por expresión:
𝜔0 = √4𝐵
5
4=
4,849
�̅� 𝑟𝑎𝑑/𝑠 (104)
y el periodo modal es:
𝑇0 =2𝜋
𝜔0= 1,296�̅� 𝑠 (105)
La altura de la ola significante se puede obtener de la siguiente Tabla V que la
relaciona con la velocidad del viento en mar abierto:

63
TABLA V
Velocidad del viento
en nudos
Altura de la ola
significante
20 10
30 17,2
40 26,5
50 36,6
60 48
En 1970 Mitsuyasu ajustó los valores de los coeficientes consiguiendo que se
satisfagan las relaciones teóricas entre el espectro del oleaje y la altura de las olas y los
periodos estadísticos. La forma ajustada es conocida en Japón como el espectro de
Bretschneider-Mitsuyasu, expresándose la ordenada espectral en la forma:
𝑆(𝑓) = 0,257𝐻1/32 �̅�1/3
−4 𝑓−5𝑒−1.03(�̅�1/3𝑓)−4
(106)
donde �̅�1/3 y �̅�1/3 son, respectivamente, la altura y el periodo significantes. El periodo
del pico espectral Tp fue relacionado con �̅�1/3 por Mitsuyasu en 1970, basado en datos
de campo, mediante la siguiente ecuación:
Tp=1,05 �̅�1/3 (107)
La fórmula del espectro de Bretschneider deducida suponiendo que el periodo de la
ola y la altura de la ola siguen una distribución de Raleigh, adquiere la expresión en
unidades inglesas siguiente:
2ℎ2(𝜔) = 4200�̅�𝑠2/�̅�𝑠
4𝜔5𝑒−1050/�̅�𝑠4𝜔4
(108)
El International Ship Structures Congress (ISSC), modificó la formula de
Bretschneider, dejándola con la siguiente expresión en unidades inglesas:
2ℎ2(𝜔) = 2760�̅�𝑠2/�̅�𝑠
4𝜔5𝑒−600/�̅�𝑠4𝜔4
(109)
donde:
�̅�𝑠es la altura de la ola significante (la media del tercio de las olas más altas).
𝑇�̅� es el periodo significante, realmente el periodo medio de las olas
significantes.
IV.22.2.- EL ESPECTRO JONSWAP
JONSWAP son las siglas de Joint North Sea Wave Project, un proyecto liderado
por la Oficina de Investigación Naval de Londres entre las décadas de los 60 y
principios de los 70. El estudio, iniciado en 1967 sobre una idea de Hasselmann (1966),
pretendía estudiar la generación, propagación y decaimiento de las olas oceánicas,
partiendo de la base de que no existían los mares totalmente desarrollados, y que, a
pesar de disponer de suficiente fetch y tiempo, existía una interacción heterogénea ola-
ola que redistribuía sus energías y terminaba por cambiar los resultados.

64
El espectro JONSWAP se puede decir que es la versión de fetch limitado del
modelo Pierson-Moskowitz, por lo que se emplea para oleajes no totalmente
desarrollados o zonas de fetch o profundidad limitada, como podría ser el caso de una
mar cerrada, un viento local o una gran bahía, donde las olas desarrolladas en un fetch
limitado bajo fuertes vientos tienden a mostrar los espectros caracterizados por picos
agudos.
La ordenada espectral propuesta del espectro JONSWAP fue definida mediante
registros tomados en la Mar del Norte. Su expresión, que depende de cinco parámetros,
es la siguiente:
𝑆(𝜔) =𝛼.𝑔2
𝜔5𝑒−
5
4.𝜔0𝜔 . 𝛾𝑟 (110)
siendo: 𝛾 = 3,30 𝜔0 = 22√𝑔2
𝑢10.𝐹
3 𝑟 = 𝑒
(𝜔−𝜔0)2
2𝜎2−𝜔02
σ vale 0,07 si ω ≤ ω0, y 0,09 si ω > ω0. F es el fetch y u10 es la velocidad del viento
medida a 10 m sobre la superficie de la mar.
IV. 23.- ESPECTROS DE ENERGÍA DEL OLEAJE DEL TIPO 𝑺 = 𝑺(𝒇, �̅�𝒛)
Las principales expresiones de los espectros de energía de oleaje correspondientes a
este tipo son:
El espectro PIERSON-MOSKOWITZ
El espectro NEUMANN
El espectro ROLL-FISHER
Estos espectros denominados frecuenciales pueden ser generalizados por una
ecuación del tipo:
𝑆(�̅�𝑧 , 𝑓) = 𝐴. 𝑓−𝑚𝑒−𝐵.𝑓−𝑛 (111)
donde:
𝐴 = 𝜑1(�̅�𝑧 , 𝑔) (112)
𝐵 = 𝜑2(�̅�𝑧 , 𝑔, 𝑓𝑚) (113)
siendo fm la frecuencia de máxima transmisión de energía en el espectro, g la
aceleración de la gravedad y m y n constantes.
Los valores de A, B, m y n caracterizan cada espectro, denominándose éstos con el
nombre del investigador o investigadores que los obtuvieron.
La expresión (111) está formada por dos factores:
𝑎) 𝑆1 = 𝐴. 𝑓−𝑚
𝑏) 𝑆2 = 𝑒−𝐵.𝑓−𝑛

65
Cuando f→∞ (T→0), el segundo factor tiende a la unidad, quedando como
expresión de la ordenada espectral:
𝑆(𝑓) = 𝐴. 𝑓−𝑚 = 𝑆1 (114)
Phillips (1966) demostró teóricamente que para frecuencias altas (f → ∞), donde el
fenómeno de rotura de las pequeñas olas componentes es importante, la forma de la
ordenada espectral tiende asintóticamente a:
𝑆(𝑓) =1,35
(2𝜋)510−2. 𝑔2. 𝑓−5 = 𝛼.𝑔2. 𝑓−5 (115)
Los ensayos confirman, en parte, la validez de la teoría de Phillips, pero también
muestran que el parámetro α es muy sensible a las variaciones del fetch F y a la
velocidad del viento �̅�𝑧.
IV.23.1.- ESPECTRO PIERSON-MOSKOWITZ
Ambos investigadores llevaron a cabo estudios de oleajes en el Atlántico Norte,
presentando sus resultados en 1964, y estableciendo un cálculo sencillo basado en una
distribución energética que asumía una mar totalmente desarrollada, es decir, aquella
en que las olas se hallan en equilibrio con el viento. Las medidas fueron obtenidas por
acelerómetros colocados en buques oceanográficos británicos. El espectro de olas lo
calcularon para varias velocidades, obteniendo la ecuación:
𝑆(𝜔) = 𝛼𝑔2𝜔−5𝑒[−
5
4(
𝜔
𝜔𝑝)−4
] (116)
donde
α es la constante de Phillips: 𝛼 = 0,076(𝑔𝑋
𝑉𝑤2)
−0,22
𝜔𝑝 es la frecuencia de pico: 𝜔𝑝 = 7𝜋𝑔
𝑉𝑤(𝑔𝑋
𝑉𝑤2 )
−0,33
X es el fetch
𝑉𝑤 es la velocidad del viento a 10 m del NMM
g es la aceleración de la gravedad
Esta fórmula es una adaptación de la original, que pretende dar la medida del viento
a una altura de 10 m, mientras que los buques de los que Pierson-Moskowitz tomaban
las medidas tenían los anemómetros a 19,5 m de altura. Se puede tomar la siguiente
equivalencia de velocidades:
𝑉19,5 = 1,026 𝑉10
Dando una altura de ola significante:
�̅�1/3 = 0,21(𝑉19,5)
2
𝑔≈ 0,22
(𝑉10)2
𝑔

66
Dicho método es el más ampliamente utilizado para espectros en aguas profundas y
mares completamente desarrollados.
Otra expresión dada en unidades inglesas, aceptada por muchos investigadores,
tiene la siguiente expresión:
2ℎ2(𝜔) = 135
𝜔5𝑒−9,7×104/𝑉𝑧4𝜔4
(117)
𝐻𝑠
2 = 3,5𝑉𝑧4/104
donde 𝑉𝑧 es la velocidad del viento, en nudos.
Esta velocidad se toma a una altura de 64 ft (19,5 m) sobre la superficie de la mar.
La fórmula de la ordenada espectral de Pierson-Moskowitz deducida de la ecuación
(111) para m=5, n=4 tiene la forma:
𝑆(𝑓) = 4,99. 10−4. 𝑓−5. 𝑒−0,56.(
𝑔
2𝜋𝑢10)4𝑓−4
𝑚2. 𝑠 (118)
A=4,99.10-4 m2/s
𝐵 = 0,56. (𝑔
2𝜋𝑢10)4
= 3,34. �̅�10 −4 𝑠−4
𝑐𝑜𝑛 �̅�10 𝑒𝑛 𝑚/𝑠 y f en s-1
IV.23.2.- EL ESPECTRO NEUMANN
Obtenida en 1952 tiene, en unidades del Sistema Internacional, para m = 6, n =2 la
siguiente expresión:
𝑆(𝑓) = 2,45.10−4. 𝑓−6. 𝑒−2.(
𝑔
2𝜋�̅�10)2𝑓−2
𝑚2. 𝑠 (119)
𝐴 = 2,45. 10−4 𝑚2/𝑠5
𝐵 = 2. (𝑔
2𝜋�̅�10)2
= 4,87. �̅�10 −2 𝑠2
con �̅�10 en m/s y f en s-1
La denominada fórmula clásica de Neumann en unidades inglesas tiene la siguiente
expresión:
2ℎ2(𝜔) = 400𝜔6⁄ 𝑒−725 𝑉𝑘
2𝜔2⁄ (120)
siendo el área:
�̅�𝑠2 = 1,9𝑉𝑧
5/105

67
Varios investigadores descubrieron algunas discrepancias notando que la fórmula
(120) sobrestimaba la predicción de las alturas de las olas por lo que se limitaron a
cambiar el exponente 6 de ω por 5. El valor del área sería ahora de:
�̅�𝑠2 = 3,8𝑉𝑧
4/104
IV.23.3.- EL ESPECTRO ROLL-FISHER
Presentada en 1956 tiene, para m = 5, n = 2, la siguiente expresión:
𝑆(𝑓) = 20,8. 10−4. 𝑓−5. 𝑒−2.(
𝑔
2𝜋�̅�10)2𝑓−2
𝑚2. 𝑠 (121)
𝐴 = 20,8. 10−4 𝑚2/𝑠4
𝐵 = 2. (𝑔
2𝜋�̅�10)2
= 4,87. �̅�10 −2 𝑠2
con �̅�10 en m/s y f en s-1
El valor de A anterior fue propuesto por Pierson en sustitución del dado
originalmente por Roll-Fisher que era:
𝐴 = 59,57. 10−4 𝑚2/𝑠4
IV.24.- DIFUSIÓN DE LAS OLAS
En principio se puede suponer que en medio del océano, en condiciones ideales,
todas las olas viajan en la misma dirección. Sin embargo, las olas de cresta larga, es
decir aquellas olas cuyas crestas permanecen rectas y paralelas, no se encuentran más
que en alguna playa con días sin viento y en un Canal de Experiencias Hidrodinámicas.
Las olas reales en el océano viajan en varias direcciones, aunque lo hagan
principalmente en dirección paralela a la del viento que las genera: es la denominada
dirección primaria. Dichas olas reales se llaman olas de cresta corta, las cuales reflejan
el verdadero aspecto de los sistemas de olas que se difunden en la mar en varias
direcciones.
Por lo tanto, el espectro de energía de las olas deducido de un registro de
elevaciones de la superficie de la mar en un punto determinado del océano siempre
estará compuesto de las aportaciones de olas procedentes de varias direcciones. El grado
de difusión de las olas tiene una gran influencia sobre algunos de los movimientos del
buque, particularmente en el de balance, el cual afecta negativamente a las principales
funciones en la mar del buque de guerra.
Las direcciones de las aportaciones de olas a un determinado punto pueden
considerarse que son infinitas, pero con el fin de poder tenerlas en cuenta en el
momento del diseño de un buque, se suele simplificar un registro suponiendo que para
un rumbo establecido del buque, la dirección primaria de las olas forma un ángulo µ

68
con el rumbo; entonces las direcciones ν de las olas secundarias están distribuidas
dentro del margen – 𝜋/2 < (𝜈 − µ) < 𝜋/2.
La energía contenida en una determinada banda de frecuencias δω y en un sector
δν es igual al volumen representado en la figura 22.IV, igual a 𝜌𝑔𝑆𝜁(𝜔, 𝜈)𝛿𝜔𝛿𝜈.
Figura 22.IV
Para propósitos de proyecto de un buque se supone que las ordenadas espectrales
de olas direccionales están relacionadas con las ordenadas del espectro de energía de la
ola total equivalente 𝑆𝜁(𝜔)mediante la expresión que ha sido contrastada en pruebas de
mar por Cummins y Bale en 1980:
𝑆𝜁(𝜔, 𝜈) =2
𝜋𝑐𝑜𝑠2(𝜈 − µ)𝑆𝜁(𝜔) m2/ (rad/s) por rad (122)
Llamando W al coeficiente 𝛿𝜈.2
𝜋𝑐𝑜𝑠2(𝜈 − µ) se obtendrán las ordenadas de cada
ola de cresta corta para la correspondiente frecuencia ω:
𝑆𝜁(𝜔, 𝜈) = 𝑊𝑆𝜁(𝜔)m2 / (rad/s)
TABLA VI W = 0,262×0,637× cos2(𝜈 − µ)
(𝜈 − µ) W
± 90º 0,000
±75º 0,011
±60º 0,042
±45º 0,083
±30 0,125
±15º 0,156
±0º 0,167
En la figura 23.IV se representa el espectro de ola direccional para cinco espectros
de cresta larga tomados a intervalos de 30º. El coseno cuadrado abarca un arco de 180º
entre ± 90º.

69
Figura 23.IV
IV.25.- UTILIZACIÓN DE LAS ECUACIONES DE LOS ESPECTROS
IV.25.1.- DETERMINACIÓN DE LA ALTURA DE LA OLA SIGNIFICANTE
EN FUNCIÓN DE �̅�𝒛 = �̅�𝟏𝟎
Conocidas la ecuaciones de los espectros, se pueden integrar en todo el rango de
frecuencias (0, ∞) para obtener la altura de ola significante. Teniendo en cuenta lo
anterior, se obtienen con carácter general las expresiones de Hs y E para espectros
frecuenciales del tipo de la ecuación (111):
𝐸 = 2∫ 𝐴. 𝑓−𝑚∞
0. 𝑒−𝐵.𝑓−𝑛
. 𝑑𝑡 (123)
𝐻𝑠 = 2,83√𝐸 (124)
𝐸 = 2.𝐴.𝐵
1−𝑚𝑛
𝑛. 𝛤 (
𝑚−1
𝑛) (125)
𝐻𝑠 = 4.√𝐴.𝐵
1−𝑚𝑛
𝑛. 𝛤 (
𝑚−1
𝑛) (126)
Particularizando las ecuaciones (125) y (126) para las expresiones (118), (119) y
(121), se obtienen los siguientes valores de E y Hs en función de �̅�10 (m/s):
Para el espectro Pierson-Moskowitz:
𝐸 = 7,47. 10−5. �̅�104 𝑚2
𝐻𝑠 = 2,445. 10−2. �̅�102 𝑚 (127)
Para el espectro Neumann:

70
𝐸 = 6,24. 10−6. �̅�105 𝑚2
𝐻𝑠 = 7,064.10−3. �̅�102,5 𝑚 (128)
Para el espectro Roll-Fisher:
𝐸 = 8,79. 10−5. �̅�104 𝑚2
𝐻𝑠 = 2,652. 10−2. �̅�102 𝑚 (129)
IV. 25. 2.- PERIODO ÓPTIMO Tópt DEL ESPECTRO PARA O. T. D.
Se define el periodo óptimo como el de máxima transmisión de energía del
espectro, es decir:
𝑇ó𝑝𝑡 =1
𝑓ó𝑝𝑡 (130)
siendo fópt la frecuencia que satisfaga las ecuaciones:
𝑑𝑆(𝑓)
𝑑𝑓= 0 𝑐𝑜𝑛
𝑑2𝑆(𝑓)
𝑑𝑓2 < 0 (131)
Teniendo en cuenta las ecuaciones (130) y (131), se ha calculado el periodo óptimo
a partir de la ecuación (130) obteniéndose la expresión general:
𝑇ó𝑝𝑡 = (𝑚
𝑛𝐵)1/𝑛
(132)
Particularizando esta expresión para los espectros dados por las ecuaciones (118),
(119) y (121) se obtienen, en función de �̅�10(m/s), los valores siguientes:
Para el espectro Pierson-Moskowitz:
𝑇ó𝑝𝑡 = 0,782. �̅�10 (133)
Para el espectro Neumann:
𝑇ó𝑝𝑡 = 0,785. �̅�10 (134)
Para el espectro Roll-Fisher:
𝑇ó𝑝𝑡 = 0,7717. �̅�10 (135)
IV.26.- EXPRESIÓN GENERALIZADA DEL ESPECTRO DE O.T.D.
Con las expresiones obtenidas de 𝑇ó𝑝𝑡 en función de �̅�10 se pueden escribir las
ecuaciones de los espectros en función de 𝑓ó𝑝𝑡 = 𝑓𝑚 quedando la fórmula general:

71
𝑆(𝑓) = 𝐴. 𝑓−𝑚 . 𝑒−
𝑚
𝑛(
𝑓
𝑓𝑚)−𝑛
𝑚2. 𝑠 (136)
Particularizando para cada una de las expresiones, tendremos:
Para el espectro de Pierson-Moskowitz:
𝑆(𝑓) = 4,99. 10−4. 𝑓−5. 𝑒−1,25.(
𝑓
𝑓𝑚)−4
𝑚2. 𝑠 (137)
con 𝑓𝑚 = 1,28/�̅�10 (138)
Para el espectro de Neumann:
𝑆(𝑓) = 2,45. 10−4. 𝑓−6. 𝑒−3.(
𝑓
𝑓𝑚)−2
𝑚2. 𝑠 (139)
con 𝑓𝑚 = 1,27/�̅�10 (140)
Para el espectro de Roll-Fisher:
𝑆(𝑓) = 20,8. 10−4. 𝑓−5. 𝑒−2,5.(
𝑓
𝑓𝑚)−2
𝑚2. 𝑠 (141)
con 𝑓𝑚 = 1,40/�̅�10 (142)
IV.27.- COMPARACIÓN GRÁFICA DE LOS ESPECTROS
En la figura 22.IV (a), (b) y (c) se han dibujado los espectros Pierson-Moskowitz,
Neumann y Roll-Fisher para velocidades de viento �̅�10 de 10, 15 y 20 m/s.
Figura 24.IV (a)
Para la velocidad del viento de 10 m/s, figura 24.IV(a) entre las frecuencias de 0,12
y 0,20 rad/s los valores de la energía discrepan ampliamente entre los espectros Pierson-
Moskowitz, Neumann y Roll-Fisher. Para valores bajos de la frecuencia hasta 0,12 rad/s

72
los tres diagramas tienen una coincidencia admisible. Lo mismo ocurre entre los
espectros Pierson-Moskowitz y Neumann a partir de 0,2 rad/s
Para la velocidad de 15 m/s, figura 24.IV (b) solamente existe una notable
diferencia del espectro Roll-Fisher con los otros dos, en la zona de los valores
máximos.
Figura 24.IV (b)
Un comentario similar se deduce de la figura 24.IV (c) para una velocidad del
viento de 20 m/s.
Figura 24.IV (c)

73
IV.28.- COMPARACIÓN DE LOS ESPECTROS EN FUNCIÓN DE 𝑯𝒔 Y 𝑻𝒔
En principio, los espectros se dedujeron para oleajes totalmente desarrollados. No
obstante el espectro Bretschneider es razonablemente aceptable para oleajes
parcialmente desarrollados.
Veamos las relaciones entre la velocidad del viento, la altura de la ola y el periodo,
utilizadas por Bretschneider para obtener su fórmula (108). Esto mismo es aplicable a la
fórmula del ISSC (109). Estas relaciones, en unidades inglesas, son:
Para mares totalmente desarrolladas:
𝐻𝑠 = 0,025𝑉𝑘2 f t (143)
𝑇𝑠 = 0,04𝑉𝑧 s
Para mares parcialmente desarrolladas se aplicaron las relaciones más antigua
de Sverdrup y Munk :
𝐻𝑠 = 0,025𝑉𝑘2 f t (144)
𝑇𝑠 = 0,45𝑉𝑧 s
las cuales daban lugar a una notable diferencia en el perfil del espectro.
Las comparaciones se pueden ver representadas en la figura 25.IV, en primer lugar,
sobre la base de una altura significante dada de 30 ft (9,14 m), para diversas velocidades
del viento y, en segundo lugar, basadas en una velocidad del viento de 40 nudos, para
diversas alturas significantes.
La considerable variación evidenciada en todo caso entre las fórmulas dadas
anteriormente, es causa de preocupación, sobre todo en lo que concierne a cuando se
trata de seleccionar un espectro representativo para su aplicación a un determinado
escenario. Por eso es necesario evaluar estas diferencias:
Figura 25.IV

74
1. La fórmula (117) de Pierson-Moskowitz está basada en las velocidades del viento
medidas a 64 ft por encima del NMM mientras que las demás, el viento se toma
generalmente a una altura entre seis a diez metros. Si se tuvieran en cuenta los
factores de corrección usuales para el gradiente del viento, encontraríamos la
disparidad entre esta fórmula y la (108) de Pierson-Moskowitz mucho menos de
la que se muestra con respecto a la velocidad del viento y a la altura significante.
2. La gran diferencia es la de la variación extrema en la ordenada de la densidad
espectral máxima entre (108) y (117) ambas en los valores de su densidad y su
frecuencia. Es difícil aceptar la frecuencia de Bretschneider la cual indica que la
energía máxima del espectro totalmente desarrollado está contenida en olas por
encima de los 3.000 ft (914,4 m) de longitud, pero muy poca en olas por debajo de
1.200 ft (365,8 m) de longitud (lo cual es casi donde Pierson-Moskowitz muestra
la máxima energía). Es el momento de considerar que, o bien, las olas en la mar
prácticamente nunca alcanzan ni se aproximan al estado del total desarrollo, o que
los datos de Bretschneider (en principio deducidos de observaciones con modelos)
no son aplicables a la mar a escala real. A este respecto es interesante notar que la
aplicación de los datos de Sverdrup y Munk a la fórmula de Bretschneider da
como resultado un espectro que se aproxima al de Pierson-Moskowitz.
En resumen, podemos ver que el mayor problema se encuentra en la selección del
periodo significante para aplicación a la ecuación de Bretschneider. Cuando se utilizan
datos de periodos observados (y esto es la base sobre la cual ISSC promueve su
fórmula), la fórmula resulta totalmente satisfactoria.
Vamos a considerar ahora las diferencias entre las distintas fórmulas de espectro en
relación con oleajes parcialmente desarrollados, es decir, en donde el viento no ha
soplado el tiempo suficiente o a través de una distancia suficientemente larga, el fetch,
como para desarrollar por completo la mar. Esto es normal que ocurra en zonas tales
como la Mar del Norte, donde los fetch están limitados, en el Golfo de Méjico y al este
del Océano Pacífico donde se producen huracanes y tifones de fuertes vientos pero de
corta duración y corto fetch.
Para definir cualquier tipo de espectro se necesitan dos parámetros. Para el
espectro tipo viento, se requieren la altura de la ola significante y del viento; para el
espectro altura/periodo se precisan la altura de la ola significante y el periodo. Para
este último caso, no obstante, Bretschneider dedujo una relación entre la altura y el
periodo que se cumple con suficiente aproximación para la mar parcialmente
desarrollada, al menos en el margen de actividad de los huracanes. Dicha relación es:
𝐻𝑠 = 0,222 𝑇𝑠2
Una vez especificada la altura significante, ya se puede definir el espectro
Bretschneider.
En la figura 26.IV se representa una comparación de los dos tipos de espectro, uno
corresponde a una mar parcialmente desarrollada que genera una ola de 30 ft (9,14m)
de altura significante, utilizando la fórmula de Pierson-Moskowitz (con velocidad de
viento de 60 nudos) y el segundo tipo a la fórmula de Bretschneider. Es de destacar la

75
similitud entre el espectro parcialmente desarrollado de Bretschneider y el espectro
totalmente desarrollado de Pierson-Moskowitz.
Figura 26.IV
Una importante causa de que los resultados de la aplicación de las distintas
fórmulas coincidan, tiene que ver con la forma en que varios investigadores miden sus
datos en la mar, por ejemplo, la determinación de alturas y periodos de las olas.
IV.29.- COMPARACIÓN ENTRE VALORES CALCULADOS Y VALORES
OBSERVADOS DE 𝑯𝒔 Y 𝑻ó𝒑𝒕
En la figura 27.IV se representan las ecuaciones (127), (128) y (129) donde se
aprecia el crecimiento de la altura de ola significante 𝐻𝑠 en metros, en función de la
velocidad del viento �̅�10 en m/s. Los valores observados han sido recogidos por Scott
(1963) y por Silvester (1974).
De la figura 25.IV se deduce que a partir de una velocidad del viento de 20 m/s los
valores calculados por las anteriores ecuaciones superan ampliamente a los valores
observados, en parte achacables a dificultades de la observación ya que la generación
del oleaje está sometida a limitaciones por el fetch y por el tiempo. En el Atlántico
Norte, que es donde Scott recogió los datos, la limitación de los grandes temporales
viene impuesta por la duración, no llegando, prácticamente en ningún caso, a desarrollar
totalmente el oleaje para velocidades de viento �̅�10 ≥ 25 𝑚/𝑠.
Para velocidades de viento �̅�10 < 10 𝑚/𝑠 los valores observados son bastante más
altos que los calculados. La curva representativa del espectro de JONSWAP dada por la
ecuación (118) ha sido obtenida en el Atlántico Norte a partir de oleajes generados por
velocidades de viento bajas asociadas a fetchs cortos, da valores de 𝐻𝑠 similares a los
del espectro de Neumann.
Los valores observados tanto por Scott como por Silvester se encuentran
distribuidos con bastante aproximación, a lo largo de la recta dada por la ecuación:
𝐻𝑠 = 0,412 �̅�10

76
Como primera conclusión que se deduce de la figura 25.IV, que se debe prestar
especial atención cuando se utilicen espectros de energía de oleaje totalmente
desarrollado para estimar el oleaje generado por velocidades de viento mayores de 20
m/s y menores de 7 m/s. Para el primer caso existirá una limitación en la generación,
bien por tiempo o bien por fetch que será necesario cuantificar. El segundo valor no es
de aplicación en la Ingeniería Naval.
En la figura 28.IV se han representado las ecuaciones (133), (134) y (135) en la que
se ve el crecimiento del periodo de máxima transmisión de energía o periodo óptimo,
𝑇ó𝑝𝑡 = 𝑇𝑚, en función de la velocidad del viento �̅�10.
Figura 27.IV Figura 28.IV
IV. 30.- ESPECTROS DE ENERGÍA DE OLEAJES PARCIALMENTE
DESARROLLADOS (O. P. D.)
Dentro de esta denominación se incluyen los espectros de energía teóricos y
experimentales que de alguna forma tienen en cuenta la limitación en la energía del
espectro impuesta, bien por el grado de desarrollo de las componentes (Bretschneider,
1959), como por la longitud del fetch (JONSWAP, 1973)
Para estimar el espectro de energía para O. P. D. se puede partir de la ecuación
(111), admitiendo que la forma del espectro de energía de O. P. D. es igual que la del O.
T. D., truncando éste en una frecuencia f1 asociada a una longitud de fetch F y
completando hasta una frecuencia inferior finf = f1 / k (1,1< k <1,6) por una curva que
depende del investigador (figura 29.IV). Las ecuaciones (123) y (124) se convierten en:
𝐸1 = 2∫ 𝑆(𝑓). 𝑑𝑓∞
𝑓𝑖𝑛𝑓 (145)
𝐻𝑠 = 2,83√𝐸1

77
Figura 29.IV
IV.31.- ELECCIÓN DEL ESPECTRO MÁS ADECUADO
Por todo lo dicho anteriormente cabe preguntarse qué fórmula debería utilizarse
para determinar el perfil del espectro. Es difícil hacer una evaluación total de los
distintos espectros propuestos y determinar cuál es el correcto para todos los casos.
Los Canales de Experiencias Hidrodinámicas utilizan aquellas fórmulas según la
zona de los mares en las que preferentemente vaya a navegar el buque en estudio.
Dichas fórmulas, que originalmente presentan los problemas antes analizados, van
siendo modificadas y ajustadas de acuerdo con la experiencia adquirida a lo largo de los
años, en cuyas modificaciones juegan un papel principal los programas de ordenador
utilizados, los cuales van recibiendo los valores de coeficientes reales obtenidos de
medidas a escala natural.
Como resumen, una filosofía a adoptar podría ser la siguiente:
El espectro PIERSON-MOSKOWITZ, (116) y (117) en unidades inglesas, y
(118) en el S.I., utilizarla para describir oleajes de viento de cresta larga en mares
abiertos de alcance ilimitado.
El espectro JONSWAP (Joint North Sea Wave Project) (110) en el S.I., para la
descripción de mares unidimensionales de alcance limitado ya que proviene de una
serie de análisis de registros de oleaje realizados en la Mar del Norte.
La familia espectral de BRETSCHNEIDER (103) en el S. I. y (108) en unidades
inglesas, muy utilizados con programas de ordenador para el estudio del
comportamiento en la mar de buques de guerra ya que se supone que dichos buques
deberán operar en cualquier parte del mundo. BRETSCHNEIDER- MITSUYASU
(106) en el S. I.
El espectro ISSC (INTERNATIONAL SHIP STRUCTURES COMMITTEE),
cuya fórmula (109) en unidades inglesas, está apoyada en un conjunto de datos
sobre alturas de olas y periodos representativos de zonas de los océanos de todo el
mundo.

78
6.- ESTADÍSTICA DE LOS OCÉANOS
IV.32.- ESTIMACIÓN VISUAL DEL OLEAJE
Insistimos en que la mar nunca es regular. No toma la forma de una serie de olas
uniformes de altura y longitud constantes procedentes de una secuencia fija y conocida.
Por el contrario, una mar real es un fenómeno aleatorio donde las olas están
permanentemente cambiando de altura, longitud y anchura. Este hecho es conocido
desde siempre pero hasta mediados del pasado siglo XX no se ha empezado a
desarrollar la metodología matemática para el conocimiento de la mar y su aplicación a
la predicción en ingeniería de las fuerzas y los movimientos producidos sobre los
artefactos flotantes.
Durante algún tiempo, aún en los comienzos de la era de las nuevas tecnologías, la
mayoría de estudios y análisis de fuerzas y movimientos se hicieron sobre la base más
sencilla de la teoría de la ola regular.
Con el desarrollo de la Teoría Espectral de Olas basada en nuevos conceptos o
propiedades indicativas de la intensidad de la mar, designadas como altura de la ola
significante y periodo de la ola significante, se ha ido abandonando, como hemos visto
anteriormente, las propiedades de las series de olas regulares cuyo conjunto se creía que
producían exactamente los efectos de la mar real.
Tanto para los estudios preliminares de comportamiento en la mar durante las
primeras fases del proyecto como para los ensayos en Canales de Experiencias con
modelos a escala, es necesario conocer las zonas de los mares en las que operará el
buque. Para ello es necesario conocer el conjunto de los Espectros Direccionales
levantados a través de numerosas mediciones realizadas en todos los mares de la Tierra.
A partir de 1986, se dispone del Atlas representado en la figura 28.IV. Mientras no se
dispuso de dicho documento completo se valoraban los Estados de la Mar mediante
escalas meteorológicas que relacionaban el espectro puntual con la velocidad del
viento. Dos fueron las más utilizadas: La Escala Beaufort y La Escala Douglas.
La Escala Beaufort de la Fuerza de los Vientos (Tabla VI) es una medida empírica
de la intensidad del viento, basada principalmente en el estado de la mar o condiciones
de las olas. Fue creada alrededor de 1805 por Sir Francis Beaufort, oficial de la Armada
Real Británica. La escala inicial no tenía las velocidades del viento sino que era un
conjunto de condiciones cualitativas numeradas del 1 al 12 y comprendían las
situaciones desde que el buque tendría la mínima velocidad para que el timón fuera
eficaz, hasta la situación extrema en la que las velas no podrían soportar la fuerza del
viento correspondiente. La escala se instituyó de forma oficial en todos los buques de la
Armada Real Británica a partir del año 1830.
La velocidad del viento en la Escala de Beaufort puede expresarse por la fórmula:
v = 0,837 B3/2 m/s Esta relación sólo se estandarizó en 1923, y la medida fue
ligeramente alterada algunas décadas más tarde para mejorar su utilidad para
los meteorólogos. Hoy, usualmente se numera a los huracanes con valores entre 12 y 16
utilizando la Escala de Huracanes de Saffir-Simpson, donde un huracán de categoría 1
lleva un número de Beaufort de 12, el de categoría 2, Beaufort 13, etc. La Categoría 1
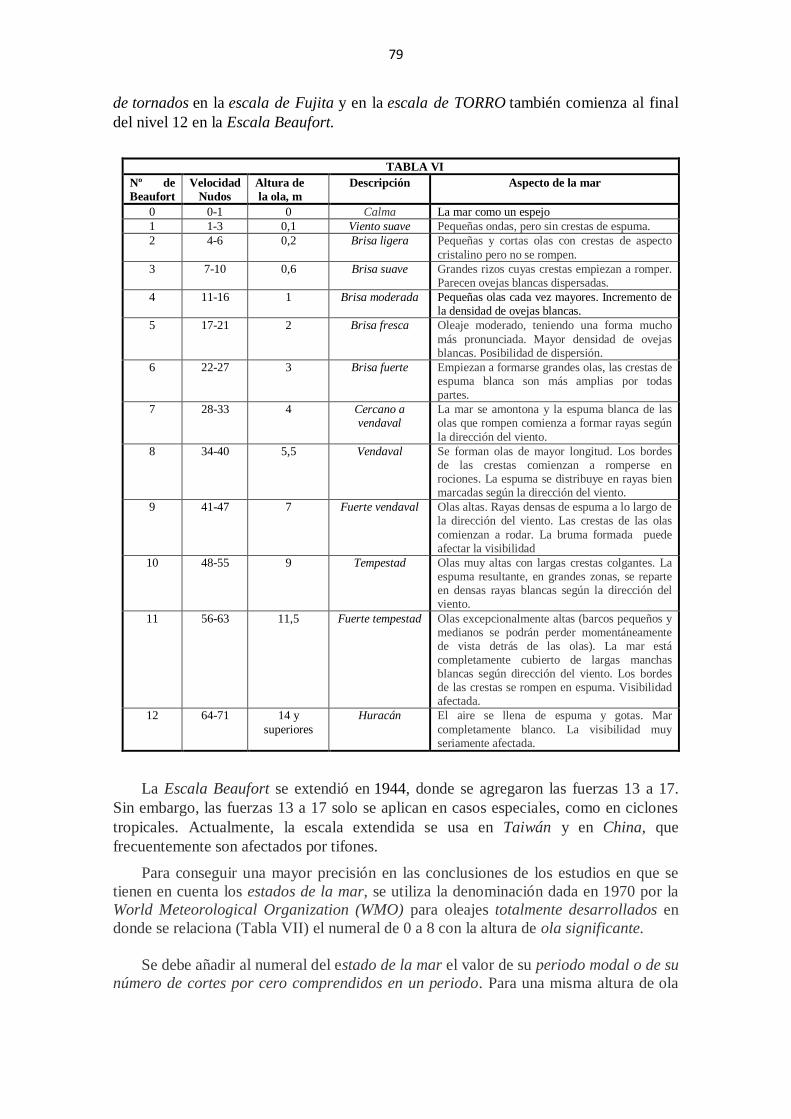
79
de tornados en la escala de Fujita y en la escala de TORRO también comienza al final
del nivel 12 en la Escala Beaufort.
TABLA VI
Nº de
Beaufort
Velocidad
Nudos
Altura de
la ola, m
Descripción Aspecto de la mar
0 0-1 0 Calma La mar como un espejo
1 1-3 0,1 Viento suave Pequeñas ondas, pero sin crestas de espuma.
2 4-6 0,2 Brisa ligera Pequeñas y cortas olas con crestas de aspecto
cristalino pero no se rompen.
3 7-10 0,6 Brisa suave Grandes rizos cuyas crestas empiezan a romper. Parecen ovejas blancas dispersadas.
4 11-16 1 Brisa moderada Pequeñas olas cada vez mayores. Incremento de la densidad de ovejas blancas.
5 17-21 2 Brisa fresca Oleaje moderado, teniendo una forma mucho
más pronunciada. Mayor densidad de ovejas blancas. Posibilidad de dispersión.
6 22-27 3 Brisa fuerte Empiezan a formarse grandes olas, las crestas de espuma blanca son más amplias por todas partes.
7 28-33 4 Cercano a vendaval
La mar se amontona y la espuma blanca de las olas que rompen comienza a formar rayas según
la dirección del viento.
8 34-40 5,5 Vendaval Se forman olas de mayor longitud. Los bordes de las crestas comienzan a romperse en rociones. La espuma se distribuye en rayas bien marcadas según la dirección del viento.
9 41-47 7 Fuerte vendaval Olas altas. Rayas densas de espuma a lo largo de la dirección del viento. Las crestas de las olas
comienzan a rodar. La bruma formada puede afectar la visibilidad
10 48-55 9 Tempestad Olas muy altas con largas crestas colgantes. La espuma resultante, en grandes zonas, se reparte en densas rayas blancas según la dirección del viento.
11 56-63 11,5 Fuerte tempestad Olas excepcionalmente altas (barcos pequeños y medianos se podrán perder momentáneamente de vista detrás de las olas). La mar está completamente cubierto de largas manchas blancas según dirección del viento. Los bordes de las crestas se rompen en espuma. Visibilidad afectada.
12 64-71 14 y
superiores
Huracán El aire se llena de espuma y gotas. Mar
completamente blanco. La visibilidad muy seriamente afectada.
La Escala Beaufort se extendió en 1944, donde se agregaron las fuerzas 13 a 17.
Sin embargo, las fuerzas 13 a 17 solo se aplican en casos especiales, como en ciclones
tropicales. Actualmente, la escala extendida se usa en Taiwán y en China, que
frecuentemente son afectados por tifones.
Para conseguir una mayor precisión en las conclusiones de los estudios en que se
tienen en cuenta los estados de la mar, se utiliza la denominación dada en 1970 por la
World Meteorological Organization (WMO) para oleajes totalmente desarrollados en
donde se relaciona (Tabla VII) el numeral de 0 a 8 con la altura de ola significante.
Se debe añadir al numeral del estado de la mar el valor de su periodo modal o de su
número de cortes por cero comprendidos en un periodo. Para una misma altura de ola

80
este dato puede variar de unas zonas a otras de la mar, dependiendo de su grado de
desarrollo.
En la Tabla VII los datos del periodo modal y de la probabilidad de ocurrencia
corresponden al Océano Atlántico Norte.
TABLA VII
Numeral del
Estado de la Mar
Altura de ola significante (m)
Velocidad sostenida del viento a 19,5 m de
altura (nudos)
Probabilidad de
ocurrencia (%)
Periodo modal (s)
Rango Valor medio
Rango Valor medio
Rango Valor medio
0-1 0,00-0,10 0,05 0-6 3,0 0,70 - -
2 0,10-0,50 0,30 7-10 8,5 6,80 3,3-12,8 7,5
3 0,50-1,25 0,88 11-16 13,5 23,70 5,0-14,8 7,5
4 1,25-2,50 1,88 17-21 19,0 27,80 6,1-15,2 8,8
5 2,50-4,00 3,25 22-27 24,5 20,64 8,3-15,5 9,7
6 4,00-6,00 5,00 28-47 37,5 13,15 9,8-16,2 12,4
7 6,00-9,00 7,50 48-55 51,5 6,05 11,8-18,5 15,0
8 9,00-14,00 11,50 56-63 59,5 1,11 14,2-18,6 16,4
>8 >14,00 >14,00 >63 - 0,05 18,0-23,7 20,0
La Escala Douglas (Tabla VIII) es una escala que clasifica los diferentes estados de
la mar en 10 grados tomando como referencia el tamaño de las olas. Fue creada por el
vicealmirante inglés Henry Percy Douglas en 1917 cuando dirigía el Servicio
Meteorológico de la Armada Británica.
TABLA VIII
Grado Altura de la ola (m) Descripción Estado de la Mar
0 Sin olas Mar llana o calma Superficie lisa como un espejo
1 0 a 0,10 Mar rizada Comienza a rizarse por partes
2 0,10 a 0,5 Marejadilla Olas cortas pero bien marcadas. Comienzan a romper las crestas tomando aspecto de ovejas
3 0,5 a 1,25 Marejada Se forman olas largas con crestas de espuma blanca
bien caracterizadas. Al romper las olas producen un murmullo que se desvanece rápidamente.
4 1,25 a 2,5 Fuerte marejada Se forman olas más largas, con crestas de espuma por todas partes. La mar rompe con un murmullo constante.
5 2,5 a 4 Gruesa Comienzan a formarse olas altas; las zonas de espuma blanca cubren una gran superficie. Al romper la mar produce un ruido sordo.
6 4 a 6 Muy gruesa La mar se alborota. La espuma blanca que se forma al romper las crestas y comienza a disponerse en bandas en la dirección del viento.
7 6 a 9 Arbolada Aumentan notablemente la altura y la longitud de las olas y de sus crestas. La espuma se dispone en bandas estrechas en la dirección del viento.
8 9 a 14 Montañosa Se ven olas altas con largas crestas que caen como cascadas. Las grandes superficies cubiertas de espuma se disponen rápidamente en bandas blancas en la dirección del viento. La mar alrededor de ellas adquiere un aspecto blanquecino.
9 Más de 14 Enorme Las olas se hacen tan altas que a veces los barcos desaparecen de la vista en sus senos. La mar está cubierta de espuma blanca dispuesta en bandas en la
dirección del viento y el ruido que se produce es ensordecedor. El aire está tan lleno de salpicaduras, que la visibilidad de los objetos distantes se hace imposible.

81
IV.33.- ATLAS DE LAS OLAS (GWS)
Con objeto de disponer de los datos sobre estados de la mar más probables en
virtud de las diferentes rutas a seguir por los buques, a partir de la segunda mitad del
pasado siglo XX los mares del mundo se dividieron en 104 zonas (figura 30.IV) .
En un principio los datos disponibles de las alturas de las olas en determinadas
zonas de los océanos, se obtenían de meras observaciones visuales. Posteriormente estos
datos se fueron mejorando con la correlación entre las alturas y las velocidades de los
vientos. Los periodos de las olas observados no se utilizaron directamente, sino que se
usaron valores estadísticos deducidos de los datos medidos.
Los primeros datos básicos se registraron en un atlas denominado “Global Wave
Statistics Book” (GWS) publicado por Hobgen, Dacunha y Oliver en 1986, basado en
55 millones de observaciones visuales transmitidas por buques durante 130 años, entre
1854 y 1984. Este trabajo sustituyó al realizado en 1967 por Hobgen y Lumb.
La gestión para el desarrollo y aplicación del GWS la realiza la firma británica
BMT (British Maritime Technology) la cual suministra datos estadísticos de olas en todo
el mundo por cuatro vías de información:
Acceso online instantáneo a los datos correspondientes a cualquier zona de la mar.
Software de sobre mesa para acceso a las zonas de la mar
Base de datos para aplicaciones a terceras personas
El libro con las tablas de dispersión de olas (Global Wave Statistics Book)
El Global Wave Statistics Book contiene las estadísticas de las 104 zonas marítimas en donde aparecen las alturas de olas y periodos de cruces por cero. Los datos de
elevación y periodo contenidos en el libro han sido controlados y mejorados por el
procedimiento denominado NMIMET propiedad de BMT. Estos datos han sido
comprobados por posteriores registros instrumentales en todo el mundo.
BMT Fluid Mechanics Limited ofrece otros productos de software y servicios de
consulta para industrias marinas y costeras. Está capacitada también para proporcionar
información sobre olas de viento y corrientes marinas para muchas más áreas
específicas, basada en datos proporcionados vía satélite.
BMT desarrolla el programa PC Global Wave Statistics, el cual dispone de una
base de datos para aquellos que necesitan un acceso rápido a las estadísticas de vientos
y olas de los océanos del mundo. El primer PC Global Wave Statistics fue editado en
1988 y es utilizado por Ingenieros Navales, Ingenieros de Costas, Contratistas de
remolques, Marinos, Oceanógrafos y Meteorólogos de varios países.
El programa contiene una base de datos que cubre la plataforma del norte de
Europa. Esta base de datos divide a la plataforma en 31 zonas marítimas
proporcionando una mayor resolución geográfica. La estructura de base de datos
implementada en el PC Global Wave Statistics versión 2.23 facilita la carga de los datos
propios del cliente en el sistema.

82
Figura 30.IV

83
Los datos de cada zona marítima está dividido en las cuatro estaciones del año
(además de todo el año), y en ocho sectores direccionales (además de todas las
direcciones). Por lo tanto la base de datos contiene 4680 conjuntos de valores.
El análisis de los datos de cada conjunto proporciona:
Las probabilidades de velocidad del viento
Las probabilidades conjuntas de la altura y el periodo de las olas
Las alturas máximas de las olas
Estadísticas persistentes de tormenta y de calma
Los programas ofrecen muchas maneras diferentes de presentar los datos de forma
tabular y gráfica. Los datos también pueden ser la salida a un archivo ASCII para la
entrada a los programas de aplicación de los usuarios.
El programa PCGWS incluye un Programa Respuesta que hace posible la
combinación de las estadísticas del clima con los operadores de amplitud de respuesta
proporcionados por el usuario con objeto de producir estadísticas de largo plazo para buques y estructuras offshore.
Este atlas se desarrolla ampliamente en documentos específicos, en los que
constan, según las zonas, datos fundamentales como: direcciones del oleaje, frecuencia
de ocurrencia de cada grupo de altura de ola significante para todos los periodos, etc.
NÚMERO DE LA TABLA
ESTADÍSTICAS DE LA ALTURA Y PERIODO DE LA OLA
Probabilidades en tanto por mil
Meses abarcados y Zona estudiada
ORIENTACIÓN (NW; N; NE; W; Todas direcciones; E; SW; S; SE)
Porcentaje de observaciones Frecuencia de ocurrencia de periodos para todas las alturas
de las olas
Total
Altura de ola significante en metros
Frecuencia combinada de ocurrencia de altura y periodo de las olas
Frecuencia de ocurrencia de alturas de olas para todos los periodos
Media de los periodos de cruces por cero (segundos)
Figura 31.IV
Como ejemplo se muestra en la figura 31.IV la disposición general de una de las
nueve casillas que comprende cada página con los datos de una zona subdivididos según
las diferentes direcciones de las olas y presentados en forma de diagramas de dispersión,
dando la frecuencia de ocurrencia resultante (en partes por mil) de combinaciones
particulares de altura de ola significante y periodos de paso por cero que ocurren
simultáneamente. La frecuencia de ocurrencia de las olas desde cada una de las
direcciones especificadas está dada en la parte superior de cada diagrama de dispersión
como porcentaje de observaciones. En el margen derecho de cada diagrama se

84
especifica la frecuencia de ocurrencia de cada grupo de alturas de ola significante para
todos los periodos. La frecuencia de ocurrencia de cada grupo de periodos para todas
las alturas de la ola, se muestra en la parte alta de cada diagrama.
En la figura 32.IV (a) se muestra la aplicación para determinar, por ejemplo, que
la probabilidad de ocurrencia de alturas de olas desde todas direcciones entre los 7 y 8
metros con periodos comprendidos entre los 10 y 11 segundos es de 13/1000 = 0,013.
En la figura 32.IV (b) se obtiene que la probabilidad de olas de cualquier periodo desde
el oeste que tengan una altura de ola significante comprendida dentro del margen entre
3 y 4 metros es de 235/1000 = 0,235.
TABLA 2.3
ESTADÍSTICAS DE LA ALTURA Y EL PERIODO DE LAS OLAS;
Probabilidades en partes por mil
Diciembre- Febrero; Zona 9
(a) (b)
Figura 32.IV

85
7.- ANÁLISIS DEL COMPORTAMIENTO DEL BUQUE EN
MAR AGITADA
IV. 34.- DEFINICIÓN
El estudio del Comportamiento del Buque en la Mar es una metodología que tiene
por objeto conocer los movimientos y los esfuerzos producidos por las olas en los
buques y artefactos flotantes.
Si la excitación que actúa sobre dichas estructuras, el oleaje, se pudiese representar
de una manera determinista como una función del espacio y del tiempo, el problema del
comportamiento en la mar sería, posiblemente, un caso particular más o menos
complicado del análisis del movimiento armónico forzado y amortiguado del buque
según sus seis grados de libertad.
Dado que la descripción determinista de la superficie de la mar parece difícil
incluso de imaginar, se propone para el estudio del comportamiento del buque en la mar
una descripción estocástica del oleaje en el dominio de la frecuencia y del número de
onda, la cual permite calcular, en la mayoría de los casos, los movimientos y esfuerzos
de los sistemas marinos con una fiabilidad suficiente y proporcionada al esfuerzo
realizado para obtenerlos.
Esta forma probabilista de describir el oleaje, que también servirá para describir los
movimientos del buque en las olas, es la causa de que el Comportamiento del Buque en
la Mar constituya una disciplina específica dentro de la Arquitectura Naval y totalmente
compatible con los principios físicos fundamentales de la Hidrodinámica Clásica.
Esta nueva disciplina aporta, entre otras cosas, una descripción de la distribución de
la energía de la mar según la frecuencia y dirección de sus muchas olas componentes y,
también, una estadística de gran utilidad asociada a la elevación del oleaje.
En los siguientes párrafos se va a exponer de una forma muy somera e intuitiva cuál
ha sido el origen y la evolución del Comportamiento del Buque en la Mar y cuáles son
los principios fundamentales en los que se basa la descripción de la superficie de la mar
que se propone y que permite una resolución brillante y bastante sencilla del problema
que se plantea.
Como ya se expuso en el apartado IV.2, Krylov en 1898 estudió los movimientos
del buque considerándolo como un sólido rígido que se mueve según sus seis grados de
libertad en olas regulares. Estas olas se propagan con cualquier rumbo relativo al buque
y con su frente de onda recto y suficientemente ancho, manteniéndose siempre paralelo
a sí mismo (olas de cresta larga).
Froude y Krylov usaron hipótesis simplificadoras que permitían calcular la presión
de las olas incidentes sobre el buque y, por lo tanto, las fuerzas producidas por éstas.
Esta brillante hipótesis de Froude-Krylov o del buque fantasma, sigue hoy día todavía
vigente y se usa para calcular las llamadas fuerzas de Froude-Krylov que, dependiendo
de las dimensiones de las olas y del buque, pueden representar una parte importante de
la fuerza total que ejercen aquellas sobre éste.

86
IV.35.- TEORÍA LINEAL CLÁSICA DEL COMPORTAMIENTO DEL BUQUE
EN LA MAR
Sobre lo anteriormente expuesto, de los estudios y las conclusiones alcanzadas
durante más de un siglo, se ha edificado la teoría lineal clásica del Comportamiento del
Buque en la Mar, cuyo éxito se extiende hasta la época actual. Se basa en las siguientes
hipótesis fundamentales:
1.- Se supone un fluido homogéneo, incompresible y sin viscosidad. El flujo es
laminar, es decir, irrotacional, por lo que sus características derivan de un
potencial de velocidad.
2.- Las olas tienen pequeñas amplitudes por lo que son también pequeños los
movimientos del buque, el cual oscila armónicamente con una frecuencia igual
a la de encuentro con las olas.
3.- Se supone una relación lineal adimensional entre la amplitud o pendiente de las
olas y las amplitudes de las rotaciones del buque según sus tres grados de
libertad.
4.- El buque es un sólido rígido con costados verticales en la flotación.
5.- Las formas del buque varían suavemente a lo largo de su eslora, por ello se
puede aplicar la Teoría de Rebanadas (Strip Theory) suponiendo, salvo en el
caso de la largada, que las velocidades transversales del flujo sobre el casco del
buque predominan sobre las longitudinales.
6.- La velocidad del buque es moderada, por debajo de la que provoca la
sustentación dinámica o la generación de trenes de ondas que puedan alterar su
superficie mojada o la forma de las olas incidentes.
Estas hipótesis se pueden aplicar a buques de formas convencionales que naveguen
a velocidades correspondientes a números de Froude de hasta 0,35.
Hay que tener en cuenta que, a partir ya de las pequeñas oscilaciones, el único
componente del movimiento del buque que presenta un comportamiento no lineal es el
de balance. Esto es debido a la intervención de la viscosidad como factor de
amortiguación de gran influencia en la citada componente de balance. Actualmente
existen métodos adaptados a programas de ordenador, principalmente para el estudio de
carenas de buques de guerra, que tienen en cuenta, no solo la amortiguación del balance
por el rozamiento del casco, de las quillas anti-balance y por los demás apéndices, sino
también por la formación de remolinos tanto con el buque parado como a diversas
velocidades.
El objetivo de calcular los movimientos de los buques y su comportamiento entre
las olas, es comprobar, como más adelante veremos, el cumplimiento de las exigencias
reflejadas en las Especificaciones de Contrato, para poder predecir si el buque será
capaz de cumplir las misiones encomendadas en el diseño. El equipo de Ingenieros
Navales y Oceánicos que trabajen en nuevos proyectos, deberán aplicar durante las
fases de Diseño Conceptual y del Diseño Preliminar, las normas deducidas de
experiencias anteriores para conseguir los mejores resultados.
Es preciso añadir que los tipos de buques de guerra que dispone la mayoría de los
países se encuentran entre los denominados buques pequeños y medianos, para los que
87
el problema de comportamiento en mares agitados es, en su mayor parte, no lineal, en
cuyo campo la precisión de los métodos de predicción es más baja.
Si bien se puede discutir la exactitud de los resultados absolutos obtenidos al
aplicar esta teoría, son de gran utilidad los resultados relativos: es razonable esperar que
si se comparan distintas alternativas a un proyecto, aquella que presente los mejores
resultados será la que ofrezca un mejor comportamiento en la mar.
IV.36.- EFECTOS DE LAS OLAS SOBRE EL BUQUE
Las olas son siempre un obstáculo y un peligro para la navegación. Su existencia
marca la principal diferencia entre el proyecto de una estructura marina, sea móvil o
fija, y el de cualquier otra situada en tierra; no hay fenómeno que influya más en la vida
y comportamiento de los barcos que las olas. Esto es así, no sólo porque son capaces de
zarandear, destrozar e incluso hundir cualquier embarcación por grande que sea, sino
porque el propio barco al navegar va generando olas, mayores cuanto mayor es la
velocidad, que frenan su avance.
Como resultado de la acción de la mar todo artefacto flotante puede sufrir alguna o
todas las siguientes consecuencias:
Movimientos exagerados.
Fuertes cargas (especialmente impactos).
Abundante embarque de agua.
Todas ellas pueden llegar a comprometer seriamente la seguridad de la nave.
Además, los movimientos, pueden reducir la eficacia de los equipos y sistemas, causar
fatiga y malestar a la tripulación, y aumentar la probabilidad de averías. A veces los
movimientos del casco inducen otros, periódicos, en los líquidos encerrados en los
tanques; cuando el período de excitación está cercano al del movimiento del fluido en el
tanque pueden aparecer fuerzas de gran magnitud que hay que tener en cuenta en el
proyecto.
Entre las cargas estructurales provocadas por la mar, destacan los fuertes golpes en
el pantoque o slamming, por ser las que más daños suelen causar. Frecuentemente, el
slamming va seguido de una vibración de alta frecuencia de toda la estructura del buque
que se conoce como whipping, y que puede durar alrededor de treinta segundos,
dependiendo de la violencia del golpe. En grandes buques los momentos flectores y de
torsión, y las fuerzas a las que están sometidas las estructuras al moverse entre olas, son
también considerables, por lo que se les debe tener muy en cuenta en las fases del
proyecto correspondientes.
De entidad menor son otros efectos como la pérdida involuntaria de velocidad, la
pérdida de estabilidad, o el broaching (desvíos del rumbo a causa de la acción del viento
o de la mar).
Para reducir los efectos anteriores, es fundamental tratar de disminuir los
movimientos y las cargas inducidas por la mar mediante la aplicación de la experiencia
en poder de la oficina de proyectos y finalmente mediante los ensayos en un Canal de
Experiencias Hidrodinámicas. Como ya se dijo anteriormente, hay que tener muy en

88
cuenta que, en ocasiones, la capacidad para el buen comportamiento en la mar es
contraria a la disminución de la resistencia al avance, es decir, a la economía en el
consumo de combustible. Una eficaz ingeniería naval deberá conseguir el adecuado
equilibrio entre ambas capacidades.
Por consiguiente cuando se quiere realizar un buen proyecto, será imprescindible
proporcionarle la capacidad necesaria para llevar a cabo las misiones encomendadas
(seakeeping performance) disponiendo como datos de partida las condiciones de mar y
de las atmosféricas que es más probable que se encuentre en la zona por la que se espera
tenga que navegar. Este proceso se denomina Reconocimiento de los Estados de la Mar.
IV.37.- FRECUENCIA DE ENCUENTRO
En olas regulares los movimientos del buque están en estrecha relación con la
frecuencia con la que el movimiento del buque encuentra a las olas.
Figura 33.IV
El problema se debe plantear sobre las condiciones básicas siguientes (figura
33.IV):
Se supondrá que el buque intenta mantener un rumbo en línea recta a velocidad �⃗⃗� constante a través de la superficie de la mar.
Ante el embate de las olas con celeridad 𝑐 y frecuencia ω, la trayectoria del buque
se mantendrá con ligeras variaciones sobre una línea recta que formará un ángulo μ
entre el rumbo elegido por el buque y la dirección de propagación de las olas.
Tomando una separación de λ metros entre las crestas de las olas, una cresta
alcanzará al buque cada 𝑇𝑒 segundos, por lo que el periodo de encuentro será:
𝑇𝑒 =𝜆
𝑐 −�⃗⃗� 𝑐𝑜𝑠 𝜇 𝑠 (146)
Siendo 𝑐 − �⃗⃗� 𝑐𝑜𝑠 𝜇 m/s, la velocidad relativa de las olas respecto al buque, la
frecuencia de encuentro se define como:
𝜔𝑒 =2𝜋
𝑇𝑒=
2𝜋
𝜆(𝑐 − �⃗⃗� 𝑐𝑜𝑠 𝜇) rad /s (147)

89
o bien
𝜔𝑒 = 𝜔 − 𝑘.𝑈𝑐𝑜𝑠 𝜇 = 𝜔 −𝜔2 .𝑈
𝑔cos 𝜇 rad /s (148)
Expresiones, cuya representación gráfica se ve en la figura siguiente de la que se
extraen las siguientes conclusiones:
Cuando la dirección del tren de olas se encuentra entre los límites 90º < μ < 270º el
rumbo del buque va hacia el de las olas, por lo que la frecuencia de encuentro es
siempre mayor que la del tren de olas.
Cuando las olas son por el través (μ = 90º o μ = 270º) la frecuencia de encuentro es
igual a la frecuencia de las olas, independientemente de la velocidad del buque.
Para ángulos con el tren de olas comprendidos entre 0º < μ < 90º o 270º < μ < 360º
la frecuencia de encuentro es menor que la del tren de olas. La frecuencia de
encuentro se considera negativa para valores de ω mayores que los de 𝜔𝑒 .
Las olas de frecuencia alta avanzan lentamente y la frecuencia de encuentro
negativa significa que el buque está adelantando a las olas. Una frecuencia de
encuentro positiva quiere decir que las olas están adelantando al buque.
Cuando �⃗⃗� 𝑐𝑜𝑠 𝜇 = 𝑐 el buque permanece estacionario respecto a las olas y la
frecuencia de encuentro es cero.
Cuando la dirección del tren de olas es de popa o por la aleta el valor de la
frecuencia de encuentro se puede observar para tres sistemas de olas diferentes. Dos de
estos sistemas darán frecuencias de encuentro positivas y el tercero dará una frecuencia
de encuentro negativa. Los correspondientes parámetros se obtienen de las ecuaciones
siguientes:
𝜔 =𝑔
2�⃗⃗� cos𝜇(1 ± √1 −
4𝜔𝑒
𝑔. 𝑈𝑐𝑜𝑠𝜇) rad / s (149)
𝜆 =2𝜋𝑔
𝜔2 m (150)

90
𝜆 =2𝜋𝑐2
𝑔 de donde 𝑐 = 1,25√𝜆 (151)
EJEMPLO DE APLICACIÓN
Un buque navega a 20 nudos (10,3 m/s) en olas regulares de popa (𝜇 = 0) .
Suponiendo que la frecuencia de encuentro |𝜔𝑒| = 0,2 𝑟𝑎𝑑/𝑠, determinar la frecuencia
del tren de olas causante y analizar los resultados.
Para 𝜔𝑒 = +0,2 𝑟𝑎𝑑/𝑠 𝜔 = 0,476(1 ± √1 − 0,84) = 𝟎, 𝟔𝟔𝟔 (𝟎, 𝟐𝟖𝟔) rad/s
𝜆 =61,61
0,444 (0,818)= 𝟏𝟑𝟗 (𝟕𝟓𝟑) m
De la ecuación (151): 𝑐 = 𝟏𝟒, 𝟕𝟒 (𝟑𝟒, 𝟑) m/s
Para 𝜔𝑒 = −0,2 𝑟𝑎𝑑/𝑠 𝜔 = 0,476(1 ± √1 + 0,84) = 𝟏, 𝟏𝟐𝟏 (−𝟎, 𝟏𝟔𝟗) rad/s
𝜆 =61,61
1,26 (0,029)= 𝟒𝟖, 𝟖𝟗 (𝟐𝟐𝟗𝟕) m
De la ecuación (151): 𝑐 = 𝟖, 𝟕𝟒 (𝟓𝟗, 𝟗𝟏) m/s
Situando los resultados en una tabla se tiene:
Ola
Nº 𝜔𝑒
rad/s
𝜔
rad/s
𝑐
m/s
c
nudos
U-c
nudos 𝜆
m
1 0,2 0,286 34,30 66,64 -46,64 753
2 0,2 0,666 14,74 28,64 -8,64 139
3 -0,2 1,121 8,74 16,98 +3,02 48,89
4 -0,2 -0,169 - - - -
A la vista de estos resultados se puede concluir con el siguiente análisis:
Las crestas del tren de olas Nº 1 están separadas 753 m pero su celeridad es
muy elevada y sobrepasa al buque con una velocidad relativa de 46,64 nudos.
De esta forma la alta celeridad permite compensar la elevada distancia entre las
crestas y hace posible que se verifique la frecuencia de encuentro especificada.
En el tren de olas Nº 2 las crestas están a mucha menor distancia y su celeridad
también es menor que la del tren Nº 1 sobrepasando al buque a una velocidad
relativa de 8,64 nudos. Por eso la distancia más corta entre las crestas, pero a
una celeridad menor, también hace posible que se verifique la frecuencia de
encuentro especificada.
Las olas del tren de olas Nº 3 están a muy corta distancia (48,89 m) y su
celeridad es de solamente 16,98 nudos, por lo que es el buque quien sobrepasa
a la ola a una velocidad relativa de 3,02 nudos, verificando también la
frecuencia de encuentro especificada.

91
El tren de olas Nº 4, al dar lugar a una frecuencia negativa de las olas no tiene
significado físico.
Figura 34.IV
Otras conclusiones sobre las frecuencias de encuentro y longitudes de onda se
pueden deducir de la representación gráfica de la ecuación (149), figura 35.IV. El
diagrama se utiliza para determinar la longitud de onda correspondiente a cualquier
frecuencia de encuentro dada, para unos valores determinados de la velocidad y rumbo
del buque. Las principales propiedades son las siguientes:

92
Figura 35.IV
Con olas de proa y de popa (𝜇 =180º y 𝜇 = 0 º) existe una frecuencia de
encuentro determinada para solamente una longitud de onda.
Figura 36.IV

93
Con olas por la aleta, un amplio margen de longitudes de onda puede producir
aproximadamente la misma frecuencia de encuentro. Por ejemplo en la figura
36.IV, un buque navegando a 20 nudos con olas por la aleta (𝜇 =45º) tiene una
componente de velocidad �⃗⃗� 𝑐𝑜𝑠 𝜇 de 7,28 m/s. En esta condición todas las
longitudes de onda desde 50 m hasta unos 400 m darán una frecuencia de
encuentro próxima a 0,3 rad/s. Por lo tanto, el buque se verá sometido a un
fuerte balance si su frecuencia natural está próxima a esta frecuencia de
encuentro común.
De la figura 36.IV se deduce que con olas por la aleta determinadas longitudes
de onda pueden dar lugar a varias frecuencias de encuentro. Así, valores de 𝜆 =50, 100, 200 𝑦 400 𝑚 pueden dan lugar respectivamente a 11, 8, 6 y 4
frecuencias de encuentro diferentes y con olas por la amura a 1, 2, 3 y 4. Para
𝜆 = 500 𝑚 existen dos frecuencias de encuentro diferentes tanto para olas por la
amura como por la aleta.
IV.38.- ESTUDIO DE LOS MOVIMIENTOS DEL BUQUE EN OLAS
REGULARES
Los movimientos del buque se estudian atendiendo a la dirección de propagación de
las olas. Son los siguientes:
Movimiento en el plano longitudinal en olas regulares de proa: es el
movimiento más sencillo. La simetría asegura la ausencia de los movimientos
de balance, deriva y guiñada y el estudio se limita a los movimientos de
largada, arfada y cabeceo.
Movimiento en el plano longitudinal en olas regulares de popa: también en este
caso el estudio se limita a los movimientos de largada, arfada y cabeceo.
Movimientos en el plano longitudinal en olas regulares por la amura: aquí los
movimientos del buque no se limitan al plano longitudinal ya que también
tienen lugar los movimientos de balance, deriva y guiñada. No obstante, las
ecuaciones del movimiento en el plano longitudinal para un buque simétrico
son independientes de las correspondientes al plano de deriva. Por eso los
movimientos en el plano de deriva en olas por la amura de pequeña amplitud,
no influirán sobre los movimientos en el plano longitudinal y estos, por lo
tanto, se pueden considerar de forma independiente.
Movimientos en el plano de deriva en olas regulares de través: los movimientos
de cabeceo y guiñada son normalmente muy pequeños y despreciables, por lo
que el estudio se limita a los movimientos de arfada, deriva y balance.
Movimientos en el plano de deriva en olas regulares por la amura: con olas de
proa, la velocidad avante del buque aumenta la frecuencia de encuentro y la
resonancia en el balance es excitada a frecuencias más bajas de la ola.
Movimiento absoluto: los seis movimientos considerados hasta ahora definen
totalmente los movimientos posibles de un buque en mar agitada. No obstante,
los estudios del comportamiento del buque se centran a menudo en la
evaluación de los movimientos en algún punto particular, como por ejemplo,
en el puente o en la cubierta de vuelo de un buque de guerra.

94
Movimientos relativos: el slamming y el embarque de agua son de
considerable importancia para la evaluación del comportamiento en la mar de
un buque de guerra.
IV.39.- ECUACIONES LINEALES PARA MOVIMIENTOS DEL BUQUE DE
PEQUEÑA AMPLITUD EN OLAS REGULARES
IV.39.1.- INTRODUCCIÓN
Como ya hemos dicho, los buques no se encuentran en la mar con olas regulares.
Por ello, el estudio de los movimientos en dichas circunstancias, parece, a priori, un
ejercicio analítico de dudosa utilidad práctica. Sin embargo, constituye una etapa
preliminar esencial para el cálculo de los movimientos del buque en una mar real.
Además, la estimación de los movimientos en olas regulares dará una idea inestimable,
que permitirá la comparación con los que el buque está sometido en la mar agitada.
IV.39.2.- DEFINICIÓN DE LOS EJES Y DE LOS MOVIMIENTOS DEL BUQUE
Los movimientos del buque en una mar agitada son muy complejos. No obstante, es
posible hacer algunas aclaraciones sobre sus características que ayudarán a comprender
su naturaleza y constituirán la base sobre la que edificar la teoría del comportamiento en
la mar.
Supongamos que un buque está intentando mantener un rumbo fijo a velocidad U
m/s, constante. Las olas causarán continuos desvíos de su rumbo y de su ruta, por lo que
el timonel necesitará realizar las pertinentes correcciones. Además, el buque se elevará
y caerá en respuesta a los cambios de nivel del agua y la cubierta no se mantendrá
horizontal. El buque seguirá una trayectoria tipo espiral que, más o menos, se
aproximará a la ruta deseada. Finalmente, su velocidad variará continuamente alrededor
del valor U, según sea su situación en las olas.
El histórico de cualquier trayectoria y movimientos del buque se podrá representar
por una combinación de los históricos de seis desplazamientos: tres traslaciones y tres
rotaciones:
Las traslaciones son:
Movimiento longitudinal de avance o retroceso f: Largada (surge).
Movimiento lateral a ambas bandas, s: Deriva (sway)
Movimiento vertical de ascenso y descenso, d: Arfada (Heave)
Las rotaciones son:
Según el eje longitudinal ρ: Balance (roll).
Según el eje trasversal σ: Cabeceo (pitch).
Según el eje vertical ψ: Guiñada de rumbo (yaw).
Para definir estos seis desplazamientos o grados de libertad se utilizará el sistema
de ejes coordenados de la figura 37.IV (a).

95
Figura 37.IV (a)
Considerando la superficie de la mar en calma como un plano, situamos sobre él un
punto T como origen de un sistema de coordenadas fijo Txy, propagándose las olas
regulares en la dirección y sentido 𝑇𝑥⃗⃗ ⃗⃗ con celeridad 𝐶 . Si �⃗⃗� es la velocidad media del
buque formando un ángulo μ con el eje Tx, al girar el sistema x,y alrededor del eje Ty un
ángulo μ se creará un nuevo sistema de ejes con el mismo origen T y tres coordenadas u,
v, w de forma que el eje 𝑇𝑢⃗⃗⃗⃗ ⃗ coincide con el rumbo medio del buque y el eje Ty coincide
con el Tw.
Sea un punto O situado en el corte entre la sección recta que pasa por el centro de
gravedad del buque, su línea de flotación media y su Línea Central. El centro de
gravedad 𝐺0 situado normalmente sobre la vertical de O, será el origen de un tercer
sistema de coordenadas cuyos ejes f, s, d, son paralelos respectivamente a u, v, w.
En un instante determinado la posición del centro de gravedad del buque 𝐺0 se
situará en G como consecuencia de las tres traslaciones y las tres rotaciones siguientes:
𝑓,⃗⃗⃗ largada, hacia proa o hacia popa, en metros (positivo hacia proa)
𝑠,⃗⃗ deriva, hacia babor o estribor, en metros (positivo hacia estribor)
𝑑,⃗⃗ ⃗ arfada, hacia arriba o hacia abajo, en metros (positivo hacia abajo)
𝜌, rotación por balance alrededor del eje f, en radianes (siendo positivo el
sentido dextrógiro mirando desde 𝐺0)
𝜎, rotación por cabeceo alrededor del eje s, en radianes (siendo positivo el
sentido dextrógiro mirando desde 𝐺0)
ψ, rotación por guiñada alrededor del eje d, en radianes (siendo positivo el
sentido dextrógiro mirando desde 𝐺0)
En los buques simétricos la largada, la arfada y el cabeceo situados en el plano de
simetría, se denominan movimientos en el plano vertical o de simetría. La deriva, el

96
balance y la guiñada, se denominan movimientos en el plano lateral o antisimétrico. El
conjunto de los seis movimientos se llaman grados de libertad.
Un nuevo sistema de coordenadas fijo al buque con origen en su centro de gravedad
G y ejes 𝑓1, 𝑠1, 𝑑1 es necesario para definir las posiciones de las masas componentes de
la estructura del buque.
IV.39.3.- POSICIÓN SOBRE LA OLA
Si 휁0 es la amplitud de la ola o distancia vertical desde el nivel medio de la mar
(NMM) hasta una cresta o un valle, la ordenada en cualquier punto x será:
휁 = 휁0𝑠𝑒𝑛(𝑘𝑥 − 𝜔𝑡) m (152)
donde el tiempo t se mide a partir de un momento arbitrario. Haciendo el cambio de ejes
al sistema u, v, w la depresión de la ola en cualquier punto (u, v) será:
휁 = 휁0𝑠𝑒𝑛[(𝑘 u cos μ - 𝑘 v sen μ) – ω t] m (153)
Si elegimos un tiempo de referencia de tal manera que el origen móvil O está en T
en el momento:
𝑡 =𝜋
𝑘𝑈𝑐𝑜𝑠𝜇 s
el punto móvil O se encontrará a una distancia de T dada por:
𝑢 = 𝑓 + 𝑈(𝑡 −𝜋
𝑘𝑈𝑐𝑜𝑠𝜇) m
𝑣 = 𝑠 m
𝑤 = 𝑑 − 𝑂𝐺0̅̅ ̅̅ ̅ m
por lo que la depresión de la ola en el punto (f, s) de la cuaderna después del
movimiento será:
휁 = 휁0𝑠𝑒𝑛(𝜔𝑒𝑡 − 𝑘 𝑢𝑐𝑜𝑠 𝜇 + 𝑘 𝑣 𝑠𝑒𝑛 𝜇) m (154)
IV.39.4.- MASAS Y MOMENTOS DE INERCIA
Consideremos al buque compuesto por un gran número de pequeñas masas δm, una
de las cuales está situada en un punto de coordenadas (𝑓1, 𝑠1, 𝑑1) respecto al centro de
gravedad del buque, figura 37.IV (b). Si el buque se encuentra sometido a aceleraciones
lineales 𝑓,̈ 𝑠,̈ �̈� m/s2 y a aceleraciones angulares 𝜌,̈ 𝜎,̈ �̈� rad/s2, las masas δm estarán
también sometidas a las aceleraciones lineales siguientes:
𝑓̈′ = 𝑓̈ + 𝑑1�̈� − 𝑠1�̈� m/s2 hacia proa
�̈�′ = �̈� − 𝑑1�̈� + 𝑓1�̈� m/s2 hacia estribor
�̈�′ = �̈� + 𝑠1�̈� − 𝑓1�̈� m/s2 hacia abajo

97
por lo que aplicando la segunda ley del movimiento de Newton obtendremos las fuerzas
y momentos necesarios para sostener estas aceleraciones.
Figura 37.IV (b)
Limitándonos a las fuerzas debidas a las tres traslaciones y a las tres rotaciones
definidas en el apartado IV.39.2, las expresiones correspondientes serán:
𝐹𝑓 = 𝑚𝑓̈ kN; 𝐹𝑠 = 𝑚�̈� kN; 𝐹𝑑 = 𝑚�̈� kN (155)
Considerando despreciables los productos de inercia, entonces:
𝐹𝜌 = 𝐼𝜌𝜌�̈� 𝑘𝑁.𝑚; 𝐹𝜎 = 𝐼𝜎𝜎 �̈� 𝑘𝑁.𝑚; 𝐹𝜓 = 𝐼𝜓𝜓�̈� 𝑘𝑁.𝑚 (156)
siendo m la masa total del buque en toneladas y 𝐼𝜌𝜌 , 𝐼𝜎𝜎 , 𝐼𝜓𝜓 los momentos de inercia
del buque en t × m2 respecto de los ejes 𝑓1, 𝑠1,𝑑1.
Para aplicaciones prácticas de Ingeniería Naval los momentos de inercia se pueden
calcular utilizando las ecuaciones:
𝐼𝜌𝜌 = 𝑚.𝑘𝜌2 𝑡 × 𝑚2; 𝐼𝜎𝜎 = 𝑚. 𝑘𝜎
2 𝑡 × 𝑚2; 𝐼𝜓𝜓 = 𝑚. 𝑘𝜓2 𝑡 × 𝑚2 (157)
Para buques convencionales, los radios de giro se pueden estimar mediante las
ecuaciones:
𝑘𝜌 = 0,3. 𝐵 𝑚; 𝑘𝜎 = 0,225.𝐿 𝑚; 𝑘𝜓 = 0,225. 𝐿 𝑚 (158)
donde B es la manga máxima en la flotación y L es la eslora en la flotación.
IV.39.5.- ECUACIONES GENERALES LINEALES
Las fuerzas y momentos aplicados a un buque por un tren de olas regulares
dependen de su carena, de su velocidad y de su rumbo respecto a las olas de una
determinada longitud. A su vez las fuerzas y momentos son funciones del
desplazamiento, de la velocidad y aceleración de la superficie de la ola y de los seis
posibles movimientos.

98
Si la amplitud de la ola es pequeña comparada con las longitudes de la propia ola y
de la eslora del buque, los movimientos también serán pequeños. Mediante las series de
Taylor se pueden obtener las aproximaciones lineales para las ecuaciones del
movimiento, resultando que una de las formas tomadas por las seis ecuaciones que
gobiernan los tres principales movimientos: balance, cabezada y oscilación vertical o
arfada, son:
∑ [(𝑀𝑖𝑗 + 𝐴𝑖𝑗)�̈�𝑗 + 𝐵𝑖𝑗�̇�𝑗 + 𝐶𝑖𝑗 𝑥𝑗]6𝑗=1 = 𝐹𝑖. 𝑒
−𝑖𝜔𝑒𝑡 (159)
donde:
𝑀𝑖𝑗 son las componentes de la matriz de masas de la estructura
𝐴𝑖𝑗 son las componentes de la masa añadida
𝐶𝑖𝑗 son las componentes de las fuerzas restauradoras
𝑥𝑗 representan los movimientos
𝐹𝑗 los valores complejos de las fuerzas y momentos perturbadores
Las ecuaciones del buque son diferentes de las habituales de un sistema de este tipo
en el cual, los coeficientes y la excitación son funciones de la frecuencia. Para una
frecuencia determinada son constantes y el sistema tiene solución. Para otra frecuencia
tanto los coeficientes como las fuerzas excitadoras serán diferentes.
De nuevo se presenta el problema de que para poder resolver las ecuaciones (159)
es preciso conocer sus coeficientes. Como se ha visto en otras ocasiones, dichos
coeficientes podrían determinarse experimentalmente aunque el procedimiento sería
muy laborioso. Por ello es preferible medir directamente los movimientos durante los
ensayos en el Canal de Experiencias Hidrodinámicas.
Experimentalmente Pierson-St. Denis supusieron que el movimiento de un buque
en una mar irregular es la suma de las respuestas a cada una de las componentes de esa
mar, y que en mares regulares del mismo periodo pero de diferente altura, la amplitud
del movimiento es proporcional a la altura de la ola, es decir, la respuesta es lineal.
Basta, por lo tanto, hacer ensayos a varias velocidades en olas regulares de diferentes
longitudes, y, por consiguiente, con distintos periodos de encuentro, para encontrar la
respuesta de un buque a una mar definida por su espectro.
IV.39.6.- CRITERIOS DE COMPORTAMIENTO
La parte más compleja del estudio del comportamiento de un buque en la mar es
decidir, a la vista, por un lado, de los valores obtenidos en los ensayos y por otra parte
de los cálculos, o de ambos a la vez, si los movimientos son aceptables. Caso de que no
lo sean será preciso modificar el proyecto de manera que esos valores lleguen a ser
admisibles para las características del buque y para las misiones que debe desempeñar.
Los primeros buques en los que se ha tratado de fijar estos criterios fueron los
buques de guerra ya que no sólo es fundamental su comportamiento hidrodinámico sino
su eficacia para desempeñar la misión que tienen asignada. Por ello es vital para el
buque de guerra mantener muy alta su capacidad de lucha en cualquier condición de

99
mar y viento, por ejemplo, no perder velocidad por muy dura que sea la mar o tener la
posibilidad de que un helicóptero maniobre sobre su cubierta.
En resumen, se puede afirmar que los criterios corresponden a tres aspectos
diferentes:
Habitabilidad y su influencia sobre el estado de la dotación, es de gran
importancia en el buque de guerra por lo que se debe en cada proyecto
optimizar la eficacia de los sistemas de estabilización con el fin de asegurar
que el estado físico del personal se pueda mantener, en general, al nivel
necesario para el cumplimiento de las misiones que cada uno tiene asignadas.
Operatividad, este aspecto se refiere a que todos los equipos, instrumentos y
sistemas del buque funcionen correctamente, así como que se mantengan sus
cualidades marineras a pesar de la mala mar.
Supervivencia, para evitar la pérdida del buque después de sufrir daños por la
mar o por buques enemigos.
Estos criterios y requerimientos para los buques de guerra se exponen en diversos
capítulos y apartados de este libro.
Especial mención, por su utilidad para el mando del buque, merece la
representación de la capacidad de un buque para enfrentarse a los estados más duros de
la mar mediante el uso de diagramas polares en los que se muestra el rumbo relativo
entre el buque y la dirección del tren de olas para deducir la máxima velocidad que
puede alcanzar en cada momento.
IV. 40.- BREVE DESCRIPCIÓN DE LA TEORÍA DE REBANADAS (STRIP
THEORY)
La Teoría de Rebanadas es un procedimiento analítico probabilístico cuyo fin es
determinar los movimientos del buque sometido a las fuerzas actuantes de las olas que
lo mueven según los seis grados de libertad: tres de traslación y tres de rotación. O
dicho de otro modo, las tres fuerzas de traslación son las resultantes según los tres ejes
coordenados de las fuerzas actuantes y las tres de rotación son los momentos
resultantes según dichos ejes, figura 38.IV.
Figura 38.IV

100
Planteadas las ecuaciones diferenciales del movimiento para cada una de las seis
resultantes, el problema consiste en la determinación de los coeficientes y de las
amplitudes y fases de la excitación. Estos coeficientes se pueden determinar siguiendo
principalmente tres métodos:
Experimentales
Midiendo los movimientos del buque directamente
Aplicando la Teoría de Rebanadas
La determinación por métodos experimentales resultó muy laboriosa y poco
efectiva, por lo que fue pronto desechada.
La medición directa de los movimientos del buque según los seis grados de libertad
se debería realizar en un buque ya construido, cabeza de una serie, o sobre un modelo a
escala en un canal de experiencias hidrodinámicas.
Las mediciones en un buque real presentan muchos inconvenientes. Por ejemplo,
los movimientos angulares se deben registrar mediante equipos de giróscopos
semejantes a los sistemas de navegación utilizados por los aviones. Para el buque de
guerra resulta menos gravoso, ya que podría utilizar los giróscopos de sus propios
sistemas de armas.
En todo caso la medición de los desplazamientos lineales son prácticamente
imposibles de realizar por lo que se suele limitar a registrar las aceleraciones de los
movimientos de balance, cabeceo y guiñada mediante sistemas de acelerómetros
instalados sobre una plataforma horizontal estabilizada en posición horizontal.
Por otra parte, la utilización de un buque real suele ser difícil de coordinar y
demasiado costosa de realizar ya que casi nunca se consiguen las condiciones
meteorológicas ideales para la prueba. Sin embargo, las pruebas con modelos a escala
en un Canal de Experiencias Hidrodinámicas presentan las ventajas de que se puede
disponer del modelo en las primeras etapas del diseño. El resultado de estas pruebas
siempre presenta incertidumbres con respecto a lo que más tarde resultará con el buque
ya construido.
Para conseguir el cálculo de los movimientos del buque sin recurrir a los métodos
experimentales, varios autores han desarrollado métodos teóricos con el fin de alcanzar
la determinación de los coeficientes y de las excitaciones. Entre los autores que han
contribuido de forma importante para conseguirlo figuran Tasai (1959), Gerritsma y
Beukelman (1967), Salvesen, Tuck y Faltinsen (1970) y Schmitke (1978). Sus teorías
son, en general, similares pero todas complicadas, diferenciándose solamente en detalles
y en el rigor matemático.
De entre todos estos métodos cabe destacar la Teoría de Rebanadas, basada
ampliamente en los métodos propuestos por Gerritsma y Beukelman (1967).
Todas las teorías desarrolladas se basan en los siguientes principios:
(a) El buque es esbelto (es decir, la eslora es mucho mayor que la manga o el
calado y la manga es mucho menor que la longitud de la ola).

101
(b) El casco es rígido, de tal forma que no se produce flexión alguna.
(c) La velocidad es moderada, es decir, no existe elevación del casco por planeo.
(d) Los movimientos son pequeños.
(e) Las secciones del casco del buque abarcan de costado a costado.
(f) La profundidad del agua donde el buque flota es mucho mayor que la longitud
de onda, de forma que se pueden aplicar las aproximaciones de la ola en aguas
profundas.
(g) La presencia del casco no afecta a las olas (hipótesis de Froude- Krylov).
Las teorías deducidas de los métodos propuestos por Gerritsma y Beukelman
(1967) se agrupan bajo la denominación general de Teoría de Rebanadas (strip theory)
ya que todas representan la forma tridimensional de la carena por una serie de
rebanadas bidimensionales como se muestra en la figura 38.IV. Cada rebanada es un
elemento finito de longitud δ xB metros.
Cada rebanada tiene asociadas propiedades hidrodinámicas locales (masa añadida,
amortiguamiento y rigidez) lo cual contribuye a la determinación de los coeficientes
para el casco completo en las ecuaciones del movimiento. De forma semejante las
excitaciones experimentadas por el casco debido a las olas se componen de las
relaciones entre todas las rebanadas.
Figura 39.IV
La Teoría de Rebanadas supone que estas propiedades hidrodinámicas locales son
las mismas que se producirían si las rebanadas estuvieran practicadas en un cilindro
infinitamente largo con la misma sección transversal, como se muestra en la figura
39.IV. Es decir, se trata de ignorar los efectos tridimensionales tales como la
interferencia mutua entre las rebanadas, las salidas del flujo por los extremos del buque
y los efectos debido a los cambios en el perfil de la rebanada a través de la longitud
δxB1.
En lo concerniente a los movimientos de las rebanadas, en primer lugar se supone
que el buque, en general, está sometido a una oscilación forzada en todos los grados de
libertad excepto para el movimiento lineal de avance o retroceso según el eje Ox,
largada (surge) figura 37.IV. Si las oscilaciones de cabeceo según el movimiento
angular alrededor del eje Oy (pitch), y la oscilación de guiñada según el movimiento
angular alrededor del eje Oz (yaw), son pequeñas, entonces los movimientos de cada
rebanada se pueden considerar situados en su propio plano.

102
Por lo tanto se podrán plantear las ecuaciones del movimiento de las rebanadas con
respecto al centro de gravedad del buque así como las propiedades hidrodinámicas de
cada rebanada, determinadas por la velocidad y aceleración de un punto situado en la
línea de agua correspondiente a la flotación de plena carga.
La utilización de las anteriores ecuaciones permite determinar los coeficientes de
las ecuaciones diferenciales del movimiento según los grados de libertad del cabeceo
(pitch) y la arfada (heave), por una parte, y por otra según los grados de libertad para el
movimiento de deriva (sway), de balance (roll) y de guiñada (yaw).
IV.41.- FUNCIONES DE TRANSFERENCIA
Como hemos visto en el apartado IV.40 La Teoría de Rebanadas se puede utilizar
para estimar los movimientos de un buque según sus seis grados de libertad, a
velocidades moderadas en olas sinusoidales regulares de poca amplitud.
Partiendo de la expresión (152) definimos la depresión de la ola en el origen O del
movimiento como:
휁 = 휁0𝑠𝑒𝑛𝜔𝑒𝑡 m (160)
siendo 휁0 la amplitud de la ola o distancia vertical desde el nivel medio de la mar
(NMM) hasta una cresta o un valle.
Y la resultante de los movimientos del buque es la representada por las seis
ecuaciones:
𝑥𝑖 = 𝑥𝑖0𝑠𝑒𝑛(𝜔𝑒𝑡 + 𝛿𝑖) m (i = 1 a 3)
𝑥𝑖 = 𝑥𝑖0𝑠𝑒𝑛(𝜔𝑒𝑡 + 𝛿𝑖) rad (i = 4 a 6) (161)
Las amplitudes del movimiento xi0 y las fases δi son funciones de la velocidad U
del buque, de su rumbo μ y de la frecuencia de encuentro ωe.
Se supone que las amplitudes del movimiento del buque son proporcionales a la
amplitud de la ola ζ0. Para expresarlas en forma adimensional basta con dividir las
amplitudes del movimiento lineal x10, x20 y x30 por ζ0 y las amplitudes del movimiento
angular x40, x50 y x60 (en radianes) por la pendiente de la ola k ζ0.
Los gráficos en los que se disponen como ordenadas las amplitudes adimensionales
resultantes y como abscisas las frecuencias de encuentro se denominan funciones de
transferencia.
Las funciones de transferencia dan la proporción de amplitud de ola o amplitud de
la pendiente de ola transferida por el sistema buque a los movimientos del buque.
Los ángulos de fase δi dan la relación de fase entre el movimiento y la ola. Si se
obtiene un valor positivo, significa que el movimiento positivo máximo ocurre δi /ωe
segundos antes de que la depresión de ola máxima tenga lugar en O. Si los valores son

103
negativos implicarán que el movimiento se retrasa respecto a la depresión en O de la
ola.
Las funciones de transferencia son características singulares para un determinado
tipo de buque y normalmente se obtienen por cálculo o en un Canal de Experiencias
Hidrodinámicas.
Cada familia de curvas se determina según los siguientes parámetros:
Los seis movimientos o grados de libertad del buque: arfada, deriva, largada,
cabeceo, balance y guiñada.
La dirección del tren de olas respecto al rumbo del buque: de proa, de popa,
por las amuras, por el costado, por las aletas o por la popa.
A diversas velocidades del buque.
No se debe confundir las funciones de transferencia con las curvas RAO (Response
Amplitude Operators), las cuales son el cuadrado de las funciones de transferencia.
IV. 42.- OPERADORES DE AMPLITUD DE RESPUESTA (RAO)
Las funciones RAO (Response Amplitude Operators) proporcionan las respuestas
del buque frente a olas regulares. Las RAO son el cuadrado de las funciones de
transferencia.
Suponiendo que la respuesta de un buque a la acción individual de una componente
de ola regular es una función lineal, se puede admitir que la respuesta al conjunto de
componentes individuales también será lineal y proporcional a la amplitud de la ola.
Si la componente excitadora es: 휁 = 휁0. cos𝜔𝑡
La respuesta será: 𝜙 = 𝜙0. cos (𝜔𝑡 + 𝛿)
Las curvas RAO se obtienen principalmente para los movimientos de arfada,
balance y cabeceo:
Para la arfada, RAO = (𝑥3
𝜁0)2
Para el balance, RAO = (𝑥4
𝜁0)2 (162)
Para el cabeceo, RAO = (𝑥5
𝜁0)2

104
8.-MOVIMIENTOS DEL BUQUE EN MAR
IRREGULAR
IV. 43.- INTRODUCCIÓN
Para el estudio de la respuesta del buque en una mar irregular se admite como base
los mismos valores estadísticos que rigen el movimiento de las olas. De la misma forma
que existe un espectro de ola, donde se representa la amplitud de la ola al cuadrado de
cada componente frente a la frecuencia, se puede obtener una representación gráfica de
las amplitudes de cualquier movimiento del buque al cuadrado frente a la frecuencia. El
espectro obtenido es conocido como espectro de respuestas y puede ser caracterizado
con los mismos parámetros estadísticos que las olas.
Durante muchos años la evaluación del comportamiento del buque en la mar en las
etapas del diseño no progresó más allá del estudio comparativo con los movimientos del
buque en olas regulares. A pesar de que las deficiencias de esta comparación eran
ampliamente reconocidas, no se pudo progresar en la investigación hasta la aparición y
desarrollo de nuevas técnicas iniciadas con la propuesta por Pierson-St. Denis. Sus
métodos se basaban en ideas desarrolladas en los conocimientos de electrónica y de las
comunicaciones. Se puede asegurar con certeza que su introducción unida a la Teoría de
Rebanadas (Strip Theory), constituyen los dos pilares fundamentales sobre los que se
apoya la moderna teoría del comportamiento del buque en la mar.
Pierson-St. Denis sugirieron que el buque se podría estudiar como si se tratase de
una caja negra similar a un filtro electrónico. La señal de entrada recibida por el filtro
electrónico contiene un número de componentes de diferentes frecuencias y éstas son
ampliadas o atenuadas para producir como señal de salida los movimientos del buque,
modificada de acuerdo con las características del filtro. Como hay un número diferente
de salidas o movimientos del buque, en realidad se trata de un conjunto de filtros cada
uno de ellos con sus propias características.
Se supondrá que el filtro es lineal en el sentido de que la amplitud de la señal de
salida (el movimiento del buque) para cualquier frecuencia dada es linealmente
proporcional a la amplitud de la señal de entrada (la ola).
Considerando las características de un filtro de paso bajo aplicado al buque en la
mar, se puede deducir que a frecuencias de encuentro bajas los movimientos de las olas
se convierten en el correspondiente movimiento ondulatorio con poca atenuación o
cambio de fase. Cuando la frecuencia de encuentro aumenta, se reducen los
movimientos ondulatorios. Con frecuencias muy altas el input de entrada al filtro es
completamente atenuado de tal forma que no hay movimiento oscilatorio resultante.

105
Estas ideas se pueden formalizar y cuantificar por medio del análisis espectral
expuesto en el apartado IV.15. El cálculo espectral es válido y riguroso si se cumplen
las condiciones siguientes:
Los movimientos del buque son linealmente proporcionales a la amplitud de la
ola para cualquier velocidad, rumbo y frecuencia.
Los movimientos del buque y las olas son de pequeña amplitud.
IV.44.- MOVIMIENTOS DEL BUQUE EN MAR IRREGULAR
Basándonos en lo expuesto en apartados anteriores, el movimiento de un buque en
mar irregular se determina a través de las siguientes etapas:
1. Elección del espectro de ola según el estado de la mar que se prevé encontrará el
buque en su navegación. Se supondrá que la ola es de cresta larga.
2. Transformación del espectro de ola en función de la frecuencia de encuentro. El
área comprendida bajo el espectro de densidad es la misma, tanto en función de
la frecuencia absoluta ω como de la frecuencia de encuentro 𝜔𝑒 .
3. Obtención del espectro del movimiento del buque (balance, cabeceo y arfada o
desplazamiento vertical) en función de la frecuencia de encuentro. Este espectro
se puede obtener: analíticamente a partir de las ecuaciones del movimiento o
experimentalmente en un Canal de Experiencias Hidrodinámicas.
4. Obtención de las curvas RAO (función de transferencia al cuadrado) en función
de la frecuencia de encuentro. Los nuevos diagramas se representan en un plano
de coordenadas en el que se toman como ordenadas la relación entre el
movimiento del buque al cuadrado y el cuadrado de la amplitud del espectro de
ola, y en abscisas la frecuencia de encuentro.
5. Si se multiplica el espectro de ola por la RAO a la frecuencia correspondiente, se
obtiene la amplitud del movimiento del buque. Del espectro de amplitud del
movimiento se pueden obtener siempre los valores estadísticos que caracterizan
el movimiento (valor significante, valor promedio, valor RMS, etc.).
6. Como se indicó en IV.42, las curvas RAO de mayor interés son la del balance
(roll), el cabeceo (pitch) y la del desplazamiento vertical o arfada (heave).
IV.44.1.- ELECCIÓN DEL ESPECTRO DE OLA Y TRANSFORMACIÓN EN
FUNCIÓN DE LA FRECUENCIA DE ENCUENTRO
Como hemos visto en el apartado IV.37 las olas son encontradas por el buque a la
frecuencia de encuentro dada por las ecuaciones (147) o (148); dicha frecuencia
aumenta para olas de proa y disminuye con olas de popa.
Hay que tener en cuenta que las fórmulas de los apartados IV.23 y IV.24, dan el
espectro de energía de la ola para un punto fijo del océano por lo que deberá
transformarse a la percepción de un observador situado sobre un punto determinado del
buque en movimiento. Para ello el espectro de energía de la ola se debe modificar en el
sentido del eje de abscisas para cubrir un nuevo margen de frecuencias cuando el
observador se encuentre sobre el buque en movimiento.

106
Figura 40.IV
Teniendo en cuenta la curva de densidad espectral asintótica con el eje de abscisas,
en la figura 40.IV se representa como ejemplo el resultado de la modificación obtenida
para olas de proa: cada frecuencia de las olas se transforma en la correspondiente
frecuencia de encuentro de acuerdo con la ecuación (148). El intervalo de frecuencia δω
centrado sobre la frecuencia ω se transforma en un intervalo de la frecuencia de
encuentro correspondiente 𝛿𝜔𝑒 . La relación entre ambos intervalos se obtiene
diferenciando respecto de ω la ecuación (148):
𝛿𝜔𝑒 = (1 −2𝜔𝑈
𝑔𝑐𝑜𝑠𝜇) 𝛿𝜔 rad/s (163)
Como hemos visto anteriormente, el área bajo el espectro de energía de la ola
comprendida dentro del intervalo de frecuencias 𝛿𝜔 , es proporcional a la energía
contenida dentro de esta banda de frecuencias. Transformando el espectro a la percepción del observador situado en el punto de referencia del buque, dicha energía no cambia de valor por lo que el área comprendida dentro de la gama de frecuencias de onda 𝛿𝜔 debe ser exactamente igual al área comprendida dentro del correspondiente intervalo 𝛿𝜔𝑒 de las frecuencias de encuentro. De aquí se deduce que las ordenadas del espectro de ola percibidas por un observador estacionario y su contrapartida en el dominio de las frecuencias de encuentro deben estar relacionadas por la expresión siguiente:
𝑆𝜁(𝜔)𝛿𝜔 = 𝑆𝜁(𝜔𝑒)𝛿𝜔𝑒 m2 (164)
Si consideramos a 𝛿𝜔 y a 𝛿𝜔𝑒 como infinitesimales se tendrá:

107
𝑆𝜁(𝜔𝑒) = 𝑆𝜁(𝜔)𝑑𝜔
𝑑𝜔𝑒= 𝑆𝜁(𝜔)
𝑔
𝑔−2𝜔𝑈𝑐𝑜𝑠𝜇 m2/(rad/s) (165)
Con olas de proa, su efecto es incrementar las frecuencias, ampliar la distancia
entre sus crestas y reducir las alturas de las ordenadas espectrales, según se muestra en
la figura 40.IV. Las áreas bajo los dos espectros son evidentemente idénticas ya que la
energía total de la ola y la altura de la ola significante no han cambiado por la
transformación.
IV.44.2.- OBTENCIÓN DE LA ALTURA DE LA OLA SIGNIFICANTE EN
FUNCIÓN DE LA FRECUENCIA DE ENCUENTRO
Suponiendo que la respuesta de un buque a la acción individual de una componente
de ola regular es una función lineal, podemos asumir que la respuesta al conjunto de
componentes individuales también va a ser lineal. Por lo tanto, la respuesta será lineal y
proporcional a la amplitud de la ola. Si la componente excitadora es:
휁 = 휁0 cos𝜔𝑡
La respuesta será:
𝜙 = 𝜙0cos (𝜔𝑡 + 𝜑)
A efectos de amplitud de ambos movimientos en el dominio de la frecuencia:
𝜙(𝜔) = 휁(𝜔).𝐻(𝜔)
Figura 41.IV
Pero al ser el espectro de ola un proceso aleatorio, no trabajamos con los valores de
la amplitud de la ola, sino con la densidad espectral, que está relacionada con el
cuadrado de la amplitud:
𝑆𝜁𝛿𝜔 =1
2∑ 휁𝑖
2𝑛𝑖=1 𝑆𝜙 𝛿𝜔 =
1
2 ∑ 𝜙𝑖
2𝑛𝑖=1
De forma que considerando el espectro de ola como entrada y la densidad espectral
del movimiento del buque como salida, puesto como función de la frecuencia de
encuentro 𝜔𝑒:
𝐻2(𝜔𝑒) =𝑆𝜙(𝜔𝑒)
𝑆𝜁(𝜔𝑒)
Resolviendo la anterior relación resulta:

108
𝐻2(𝜔𝑒) =
1
2.𝜙2(𝜔𝑒)
∆𝜔𝑒
1
2.𝜁2(𝜔𝑒)
∆𝜔𝑒
= [𝜙(𝜔𝑒)
𝜁(𝜔𝑒)]2
(166)
IV.44.3.- DETERMINACIÓN DE LOS MOVIMIENTOS DEL BUQUE
La respuesta del buque en mar irregular se rige por valores estadísticos igual que el movimiento de las olas. De la misma forma que existe un espectro de ola, donde se representa la amplitud de la ola al cuadrado de cada componente con respecto a su frecuencia, se puede obtener una representación gráfica de las amplitudes de cualquier movimiento del buque al cuadrado frente a la frecuencia.
El espectro obtenido es conocido como espectro de respuestas y puede ser
caracterizado con los mismos parámetros estadísticos que las olas. Suponiendo que en una mar irregular la respuesta de un buque a la acción
individual de una componente principal regular de ola irregular es una función lineal,
se puede admitir que la respuesta al conjunto de componentes individuales también será
lineal y proporcional a la amplitud de la ola.
Determinada la RAO correspondiente a uno de los movimientos previstos en las
ecuaciones (162) se puede calcular el valor de los movimientos del buque
multiplicando el espectro de ola elegido, por la RAO.
𝑆𝜁(𝜔𝑒). 𝑅𝐴𝑂 = 𝑆𝜙 (𝜔𝑒) (167)
De esta forma podemos obtener la densidad espectral del movimiento del buque.
Integrando el área comprendida bajo la curva, obtenemos:
𝑚0 = ∫ 𝑆𝜙 (𝜔𝑒). 𝑑𝜔𝑒∞
0 (168)
𝜙1/3 = 2,0√𝑚0 y 𝐻1/3 = 4,0√𝑚0
𝜙𝑝𝑟𝑜𝑚𝑒𝑑𝑖𝑜 = 1,25 √𝑚0
𝑚0 = ∫ 𝜔𝑒𝑛𝑆𝜙 (𝜔𝑒). 𝑑𝜔𝑒
∞
0 (169)
Conocidos los distintos momentos determinamos el coeficiente de corrección
debido al ancho de banda seleccionado:
휀2 =𝑚0.𝑚4.𝑚𝑒
3
𝑚0. 𝑚4= 1 −
𝑇𝑐3
𝑇𝑧2
𝐶𝐹 = √1 − 휀2
𝜙1/3 = 2,0. 𝐶𝐹√𝑚0

109
También se puede determinar el valor máximo de la amplitud del movimiento:
𝜙𝑚á𝑥 = √2,0.𝑚0𝑙𝑛 (2.√1−𝜀2
1+√1−𝜀2. 𝑁) (170)
Apréciese que si los valores obtenidos son de banda estrecha, es decir ε = 0, los
valores estadísticos se obtienen con los coeficiente de la distribución de Rayleigh, sin
ningún tipo de corrección. Por ejemplo:
𝜙1/3 = 2,0. 𝐶𝐹√𝑚0 = 2,0√𝑚0. √1 − 휀2
Si ε = 0, entonces:
𝜙1/3 =2,0√𝑚0. √1 = 2,0√𝑚0
IV.45.- FENÓMENOS ASOCIADOS A LOS MOVIMIENTOS EN MAR
AGITADA
Los principales fenómenos provocados por el oleaje son:
La resistencia añadida por las olas que afectan a la velocidad sostenida del
buque.
El slamming, el embarque de agua y la emersión del propulsor
IV.45.1.- RESISTENCIA AÑADIDA POR OLAS QUE AFECTAN A LA
VELOCIDAD SOSTENIDA DEL BUQUE
En la fase del proyecto del buque durante la que se desarrollan las formas con
auxilio de las pruebas en un Canal de Experiencias, se admitía en un principio que unas
formas que tienen menor resistencia al avance que otras en aguas tranquilas, también
tendrán proporcionalmente menor resistencia en mar agitada. Esta conclusión ha sido
confirmada después de muchos años de experiencia, incluso por pruebas con modelos
en olas a escala creadas en Canales de Experiencias.
El estudio cuantitativo realizado se ha limitado a unas condiciones de la mar con
olas de tamaño medio ya que el caso extremo es de menor interés desde el punto de
vista de resistencia al avance. Dicho en otras palabras, el estudio se llevó a cabo con
olas suficientemente grandes como para causar importantes pérdidas de velocidad sin
reducción de la potencia propulsora.
Si la frecuencia de encuentro se aproxima a la resonancia puede dar lugar a una
situación de tener comparativamente grandes amplitudes de cabeceo, aunque las alturas
de las olas no sean grandes comparadas con las dimensiones del buque.
Suponiendo el cabeceo que se produce con olas que no lleguen a romper contra la
superestructura de proa, la siguiente ecuación proporciona resultados suficientemente
válidos para obtener el valor de unas primeras aproximaciones de la resistencia en libras
añadida por las olas:

110
𝑅𝑜𝑙𝑎𝑠 = 𝜌𝐵𝜁
2𝜋(𝑈 + 𝑣𝑤)2(1 − 𝑐𝑜𝑠𝛿) (171)
donde: B = Manga del buque
휁 = Altura de la ola (desde la cresta al seno)
U = Velocidad del buque, en pies/s
𝑣𝑤= √𝑔𝜆 2𝜋⁄ = Velocidad de la ola en pies/s
𝛿= ángulo de divergencia desde la línea central, de una línea de agua algo
más alta que la LWL
Otras fórmulas para determinar la resistencia añadida en olas irregulares se basan
en la frecuencia de encuentro y en admitir: que los movimientos del buque varían
linealmente con la amplitud de la ola incidente, que la resistencia añadida es
proporcional al cuadrado de la amplitud de la ola ( 휁0) y en el principio de
superposición.
Por ello, se puede expresar la RAO de resistencia añadida en olas irregulares para
condiciones particulares de carga, velocidad y rumbo μ del buque por:
𝑅𝐴𝑂(𝜔𝑒) =1
𝜁02
𝑅𝑜𝑙𝑎𝑠
𝜌𝑔𝐵2
𝐿𝑝𝑝
(172)
siendo: 𝑅𝐴𝑂(𝜔𝑒) = operador adimensional de resistencia añadida en olas irregulares
B = Manga del buque (m)
𝐿𝑝𝑝 = Eslora entre perpendiculares (m)
𝑅𝑜𝑙𝑎𝑠 = Resistencia añadida en olas (kN)
De acuerdo con lo expresado en la ecuación (165) se puede calcular la resistencia
añadida en olas irregulares en las condiciones expuestas más arriba:
𝑅𝑜𝑙𝑎𝑠 = 2𝜌𝑔.𝐵2
𝐿𝑝𝑝∫𝑅𝐴𝑂(𝜔𝑒). 𝛷(𝜔𝑒). 𝑑 𝜔𝑒 (173)
donde:
la integral se debe extender a todas las frecuencias de encuentro de interés.
𝛷(𝜔𝑒) es la forma espectral que describe el estado de la mar, en m2 / (rad/s)
cuyo espectro de amplitudes es:
𝛷(𝜔𝑒) =1
2휁2(𝜔𝑒) (174)
Otra fórmula basada en los mismos principios anteriores, pero abarcando todas las
frecuencias de encuentro es:
𝑅𝑜𝑙𝑎𝑠 = 2. ∫𝑅𝑜𝑙𝑎𝑠(𝜔𝑒)
𝜁02.𝑆(𝜔𝑒)
. 𝑑𝜔𝑒∞
0 (175)
Uno de los principales objetivos para calcular la resistencia añadida en olas
irregulares es para tenerla en cuenta en el momento del diseño de la planta propulsora

111
con el fin de evitar una posible sobrecarga del motor dependiendo de las misiones del
buque, sobre todo cuando se trata de buques de guerra, remolcadores de altura, buques
guardacostas o buques de auxilio a plataformas.
IV.45.2.- EL SLAMMING, LA EMERSIÓN DEL PROPULSOR Y EL
EMBARQUE DE AGUA
Si un buque navega en una mar agitada, sus movimientos de arfada, cabeceo y
balance son de gran amplitud. Si en este escenario su velocidad es alta y su rumbo
mantiene las olas de proa, es muy probable que saque del agua la parte baja de la roda y
la hélice propulsora en repetidas ocasiones. Esto es más acusado cuanto mayor es la
eslora del buque, hasta un determinado límite.
Cuando la proa baja de nuevo, el buque, dependiendo de su velocidad, se puede
encontrar con una cresta o con un seno de una ola. Al producirse su caída desde una
considerable altura el impacto hidrodinámico o slam contra la superficie de la mar es tan
violento que puede causar severos daños tanto estructurales como en los equipos
instalados.
La consecuente vibración que se produce en el buque es de baja frecuencia y muy
próxima a la natural propia. Esta vibración denominada whipping, es de indudable
apreciación por la dotación.
Para conseguir una disminución de la frecuencia de slamming, se debe aumentar el
calado a proa y para disminuir la severidad del slamming se deben adoptar líneas finas a
proa con elevados ángulos de astilla muerta. Estas modificaciones son posibles en las
primeras fases del proyecto.
La emersión de la hélice propulsora y la inmersión posterior tiene como principal
efecto una rápida disminución y a continuación un aumento del par resistente soportado
por el sistema propulsor, lo cual producirá que se embale la máquina propulsora e
inmediatamente se vea frenada, con el peligro consiguiente para su integridad. El eje de
cola se verá a su vez sometido a una vibración torsional imprevista que podría entrar en
resonancia y llegar a seccionar el eje.
El embarque de agua puede ocurrir en cualquier parte de la cubierta principal,
particularmente donde el francobordo es menor. No obstante, el mayor embarque se
produce con mayor frecuencia, como el slamming, con olas de proa, con consecuencias
para la maquinaria y equipos de cubierta. Esta situación es peligrosa para el personal.
En casos extremos si el peso de la cantidad de agua embarcada es significativo y la
caída de la proa se produce en un seno de una ola el buque podría hundirse por ojo.
En buques de guerra del tipo fragata a baja velocidad en mar agitada, se suelen
producir embarques de agua en la zona de proa con mayor frecuencia que si se
incrementa la velocidad hasta conseguir un equilibrio entre dicha velocidad, la altura de
las olas y con unas formas de proa diseñadas con el fin de provocar la divergencia de la
ola cortada por el buque. Por ejemplo, una fragata de 120 m de eslora, puede afrontar
una mar con olas de unos 5 metros a velocidad entre 18 y 20 nudos. Sin embargo desde
el centro hasta popa el embarque de agua en estas circunstancias es más frecuente,
barriendo la cubierta en esa zona y constituyendo un peligro para el personal.

112
De acuerdo con lo dicho más arriba, se deduce como recomendación para disminuir
la frecuencia del embarque de agua, el incremento del francobordo a proa. No es
recomendable el excesivo ángulo del abanico en las formas de proa (flare) ya que
produce un efecto de amplificación de las olas encontradas y por lo tanto aumenta la
frecuencia del embarque de agua.

113
9.- CRITERIOS DE OPERATIVIDAD DEL BUQUE DE
GUERRA EN OLAS
IV.46.- VÍAS PARA EL ESTUDIO DEL COMPORTAMIENTO DEL BUQUE EN
LA MAR
El comportamiento del buque en la mar recibió un gran impulso a partir del último
tercio del siglo pasado. Los procedimientos desarrollados en esta disciplina son:
1.- Información proporcionada por buques de guerra durante su vida útil.
2.- Pruebas con modelos a escala en Canales de Experiencias Hidrodinámicas.
3.-Utilización de modelos matemáticos cuya precisión de resultados aumenta en la
medida que se perfeccionan los diversos programas de ordenador.
Cada uno de estos procedimientos tiene ventajas e inconvenientes:
Procedimiento 1
Presenta las ventajas siguientes:
Las medidas a escala natural tienen por principal objeto obtener los coeficientes
reales con los que resolver las ecuaciones planteadas para cada modelo
matemático de futuros buques semejantes.
Permiten obtener conclusiones sobre comportamiento en la mar y sobre
estabilidad, aplicables al diseño de buques con desplazamientos y formas
similares. Son de destacar los trabajos con carenas reales dados a conocer en
1980 por Nathan K. Bales y continuadas por él mismo, D. A. Walden, W. R.
McCreight y otros.
Se establecieron para buques de guerra normas basadas en datos como: la
aceleración vertical en algunos puntos, los ángulos de balance y cabezada, o el
número de impactos hidrodinámicos y de embarques de agua por hora.
Como inconvenientes más significativos conviene señalar:
Los ensayos con carenas reales son muy costosos y difíciles de realizar.
Es muy difícil medir con cierta precisión desde un buque en medio de un
temporal el estado de la mar, sobre todo el espectro direccional de las olas.
También presenta muchas dificultades relacionar las medidas obtenidas con el
estado de la mar, ya que éste varía con mucha frecuencia.
Procedimiento 2
Las principales ventajas son:
En los ensayos con modelos se puede variar a voluntad el estado de la mar,
dentro de las limitaciones propias del Canal de Experiencias.
Se pueden llevar a cabo durante la fase del Diseño Preliminar.

114
Se obtienen valores muy aproximados de los coeficientes con los que resolver
las ecuaciones planteadas para cada modelo matemático de futuros buques
semejantes
Como limitaciones más significativas se pueden citar:
La influencia en el efecto de escala de la viscosidad en la amortiguación del
movimiento de balance y el de la tensión superficial en la formación de rociones,
factores difíciles de reproducir con respecto a la realidad.
Las impuestas por las dimensiones de algunos Canales de Experiencias, ya que
las cortas carreras del modelo a velocidades crecientes con mar de través y
oblicua, no permiten estabilizar los parámetros que se quiere medir.
Su elevado coste.
Procedimiento 3
La tendencia para la realización de estudios analíticos consiste en utilizar modelos
de tipo lineal, como el del programa NSSMP (NAVY Standard Ship Motion Program)
utilizado por la Armada de Estados Unidos para sus proyectos o el programa MOLAS II
utilizado por NAVANTIA. Las principales ventajas de los métodos analíticos son:
Su coste es muy inferior al de los otros procedimientos y son relativamente
fáciles de utilizar.
Permiten tener completamente controlado el estudio, ya que todas las variables,
incluida el estado de la mar, están especificadas.
Gracias a las anteriores ventajas, es posible durante las primeras fases del
proyecto, obtener distintas carenas alternativas y elegir la que más se ajuste a los
requerimientos impuestos.
A pesar de las limitaciones de estos programas al suponer la linealidad de las
ecuaciones, el estudio del comportamiento en la mar por procedimientos
analíticos ha protagonizado con éxito la resolución de problemas durante más de
cuarenta años.
La principal dificultad de este procedimiento está en sus limitaciones para resolver
los problemas no lineales.
De los tres procedimientos tradicionalmente empleados en la hidrodinámica del
buque para averiguar los movimientos y las cargas que las olas inducen sobre él, el
relacionado con las pruebas de buques reales es el que da los resultados más fiables.
La principal aplicación de las pruebas de mar es conocer cómo se comporta el
buque recién construido en la realidad. Sin embargo la utilidad de las pruebas de mar no
se queda ahí, sirven también para comprobar la validez de las predicciones realizadas
tanto por la teoría como por la experimentación, y por consiguiente permiten ir
mejorando poco a poco los procedimientos de la correlación modelo-buque. Además el
conocimiento de lo que realmente sucede hace más sencillo establecer criterios fiables
sobre algunos problemas concretos como pueden ser los daños que el mal tiempo causa
en las estructuras o la altura más conveniente de la amurada.

115
Es posible que en el futuro puedan aplicarse a las pruebas de comportamiento en la
mar de un buque las llamadas técnicas de identificación. Estas técnicas permitirían
calcular los coeficientes para resolver las ecuaciones diferenciales que gobiernan
cualquier fenómeno específico, pero presentan muchos inconvenientes. Hasta ahora sólo
se han aplicado para determinar las características de maniobrabilidad y resistencia al
avance.
Los ensayos con modelos geométricamente semejantes permiten hacer pruebas
sistemáticas, mediante las que se puede conocer la influencia de cada uno de los
parámetros principales de la embarcación en sus características hidrodinámicas. Basta
para ello construir varios modelos, en los que se han cambiado alguno de sus
parámetros principales para poder valorar su influencia. El principal inconveniente de
los ensayos con modelos geométricamente semejantes es el procedimiento de
extrapolación, es decir, el modo de obtener lo que haría el barco real a partir de los
resultados obtenidos probando un modelo de tamaño reducido. Para disminuir la
influencia en los resultados de la diferencia en tamaño, lo que se conoce como efecto de
escala, conviene construir modelos grandes; los límites al tamaño vienen generalmente
impuestos por el de las instalaciones en las que se van a efectuar los ensayos. A veces,
para eliminar estas limitaciones y por consiguiente disminuir el efecto de escala, los
modelos se ensayan en estanques naturales con el inconveniente que supone la pérdida
del control de las condiciones ambientales.
En los últimos años, gracias al empleo de ordenadores de gran capacidad, muchos
de los estudios relacionados con la hidrodinámica del buque se llevan a cabo
resolviendo numéricamente las ecuaciones diferenciales que definen matemáticamente
el problema de que se trate. Estos métodos son baratos y fáciles de usar. Además
pueden emplearse para calcular muchas alternativas, correspondiendo cada una a
diferentes valores de las variables, lo que permite valorar su influencia en la fase de
proyecto y por consiguiente seleccionar la que hubiera dado mejores resultados. El
principal inconveniente de los programas para calcular las características
hidrodinámicas de un buque por medio del ordenador, es la gran cantidad de
simplificaciones que es preciso realizar para resolver las ecuaciones de manera que, en
muchas ocasiones, la ecuación final no representa la realidad.
Como comentario muy importante a lo expuesto anteriormente se puede añadir que
las recomendaciones emanadas del resultado de los procedimientos para la mejora del
comportamiento del buque en la mar presenta a la ingeniería naval una clara dicotomía
entre el fin perseguido por los procedimientos anteriores y el coste del ciclo de vida del
buque. Normalmente para conseguir el primer objetivo será necesario cambiar las
dimensiones principales y modificar la carena, normalmente abriendo las formas, lo
cual incrementará el coste del ciclo de vida al producirse un aumento de la resistencia
al avance y en consecuencia un aumento del consumo de combustible.
IV. 47.- ALGUNAS EXIGENCIAS DE LAS ESPECIFICACIONES DE
CONTRATO
El estudio del comportamiento en la mar de un buque de guerra, debe tener como
objetivo principal conseguir que el buque proyectado sea capaz de desempeñar los
objetivos de su Tipo o Clase en determinados Estados de la Mar. Esto significa que en
el diseño del buque se tomarán las medidas necesarias para evitar que el estado de la
116
mar para el cual se proyecta el buque, sobrepase los efectos límite fijados en las
Especificaciones de Contrato, ya que esto daría lugar a la pérdida de la capacidad de
supervivencia del buque o a una considerable merma en el desempeño de sus misiones.
Las Especificaciones de Contrato del Buque de Guerra definen qué tipo de
circunstancias meteorológicas límite deberá ser capaz de resistir el buque y cuáles en las
que podrá cumplir con las misiones asignadas. Estas circunstancias se denominan
condiciones ambientales, que varían según el tipo de buque que se trate, y afectan tanto
a las condiciones físicas externas (estabilidad y resistencia estructural) como a las
internas (funcionamiento de equipos, disponibilidad del personal, etc.)
Dentro de las condiciones físicas externas, figura, por ejemplo, que la estructura del
buque y los polines de los aparatos situados sobre la cubierta de intemperie deberán
proyectarse para resistir golpes de mar de unos 2400 N/m2.
Entre las condiciones ambientales físicas internas figuran, por ejemplo, que el
buque y sus sistemas se diseñarán para operar dentro de un margen de condiciones
ambientales comprendidas entre la zona sub-ártica y la tropical, para lo que fija las
temperaturas y humedades del aire y las temperaturas del agua del mar. Estas
condiciones afectan principalmente al diseño de sistemas, como por ejemplo, el de aire
acondicionado.
Las condiciones de diseño de la planta propulsora respecto al medio ambiente
quedan fijadas por la presión atmosférica y por el contenido de sales en el aire de
admisión de los motores térmicos. El funcionamiento de la maquinaria y equipo
situados en el exterior debe ser satisfactorio dentro de ciertos límites de temperatura y
humedad del aire. Además se fija, para los conductos de admisión y escape de motores
de combustión interna unas condiciones de viento de 75 nudos de velocidad constante y
ráfagas de 100 nudos.
En general se admite una reducción de la capacidad operativa del buque para las
condiciones externas límite, siguientes:
Temperatura del aire 46º C.
Humedad relativa 50 %.
Temperatura del agua del mar 35º C.
Viento estacionario de 100 nudos y ráfagas de 120 nudos.
Precipitación de 60 mm por hora a la vez que vientos de 35 nudos.
El buque será capaz de sobrevivir navegando sin sufrir daños que pudieran impedir
el cumplimiento de sus misiones, con Estados de la Mar > 8, lo que significa olas
de > 14 metros y velocidad media del viento > 60 nudos,
Durante la navegación ciertas estructuras como mástiles, superestructuras y
elementos de sujeción de armas y equipos para el manejo de municiones se diseñarán
aplicando los factores de carga utilizados para las condiciones de tormenta. Los
factores de carga son números con los que se incrementan las cargas nominales
máximas o se reducen las mínimas, de tal manera que con ellos se aumenta o se
disminuye, respectivamente, la probabilidad de que las cargas sean excedidas o no sean
alcanzadas. El punto de referencia para el cálculo de los factores de carga se sitúa sobre

117
el plano de crujía a una determinada distancia a popa de la perpendicular de proa y a
una cierta altura sobre la línea base.
Para estas condiciones, dichos factores se basan ante todo, dependiendo del tipo de
buque, en una cierta amplitud de balance (alrededor de 25º) con un determinado periodo
(alrededor de 10 segundos) y una amplitud de arfada (de unos 5º) con un periodo
determinado (entre 5 y 8 segundos).
Por ejemplo, para un buque tipo fragata las coordenadas del punto de referencia
son: longitudinal de 58 metros y vertical de 6 metros. Los factores de carga para
condiciones de tormenta son los siguientes:
Longitudinal.- 0,24 más 0,00085 veces la distancia en metros a proa o a popa del
punto de referencia más 0,00976 veces la distancia en metros sobre o por debajo
del punto de referencia.
Transversal.- 0,41 más 0,0049 veces la distancia en metros a proa o a popa del
punto de referencia más 0,0169 veces la distancia en metros sobre o por debajo del
punto de referencia.
Vertical.- 1,3 más 0,00976 veces la distancia en metros a proa o a popa del punto de
referencia más 0,0169 veces la distancia en metros a babor o a estribor del punto de
referencia.
El buque será capaz de resistir las cargas ambientales, mantener la lubricación
satisfactoria, mantener los huelgos adecuados y evitar la pérdida de fluidos para los
aparatos y equipos instalados, en las siguientes condiciones:
Cuando el buque se mantiene de modo permanente trimado por debajo de la proa o
de la popa 5º desde el plano horizontal.
Cuando el buque está permanentemente escorado hasta 15º a cualquier banda.
Cuando el buque está cabeceando 10º por encima o por debajo de su plano
horizontal.
Cuando el buque se está balanceando hasta 30º a cualquier banda.
Para los sistemas del servomotor del timón, generadores diesel y componentes de la
propulsión principal, el máximo ángulo admisible de balance a cualquier banda es
de 45º.
Para el caso de abandono de buque los equipos de salvamento serán capaces de
funcionar con eficacia cuando el buque esté sometido a balances de 10º alrededor de
una escora permanente de 25º.
Existen otras condiciones que además de las descritas han de ser comprobadas en el
estudio del comportamiento del buque en la mar. Por ejemplo:
Las pérdidas involuntarias de velocidad del buque en función del estado de la mar.
El efecto del sistema de aletas estabilizadoras de un determinado tipo de buque.
El Sistema de Estabilización es vital para el cumplimiento en mar agitada de las
misiones asignadas, de ahí que los límites exigidos sean de estricto cumplimiento.

118
En general, para el sistema de estabilización se exige en las Especificaciones de
Contrato que sea adecuado para que a todas las velocidades operativas, incluida la
velocidad máxima, la reducción del balance sea eficaz para un amplio margen de
frecuencias de olas y Estados de la Mar.
Por ejemplo, para una fragata, este sistema tendrá una capacidad de
amortiguamiento del balance capaz para mantenerlo, durante la maniobra de
helicópteros con el buque navegando entre 15 y 20 nudos, a plena carga, y con estado
de la mar de 5, dentro de los valores siguientes:
TABLA IX
CONCEPTOS AVIONES HELICÓPTEROS
Ángulos de Balance (º RMS) < 2,5 < 2,5
Velocidad vertical en el punto de
aterrizaje (m/s RMS)
< 1,0 < 1,0
Ángulo relativo del viento (º) ± 30º por la proa ± 50º por la proa
Además, para cada tipo de helicóptero, con respecto a la maniobra sobre cada tipo
de buque, existen las denominadas Cartas de Vientos donde se especifican las
condiciones máximas de balance y cabezada para la toma y despegue.
En la Tabla X se resumen ejemplos de lo que se especifica en una Carta de Vientos:
El cumplimiento de las condiciones anteriores diferencia la calidad entre varios
proyectos de buques de guerra. Sin embargo, a veces, la aplicación de medidas para la
mejora en general del comportamiento del buque entre las olas, no son compatibles con
la economía reflejada en el consumo específico de combustible. Por ejemplo, la
exigencia de una velocidad sostenida entre ciertos límites de mar y viento influye
directamente en el citado consumo. La apertura de las formas del buque para mejorar su
comportamiento entre las olas provoca un aumento de la resistencia al avance del buque
y por lo tanto un incremento del consumo de combustible.
Por todo ello el equipo de ingenieros responsables del proyecto debe alcanzar el
equilibrio entre la eficacia y el coste de funcionamiento del buque.
IV. 48.- PREDICCIÓN DEL COMPORTAMIENTO EN LA MAR DURANTE
LAS PRIMERAS FASES DEL PROYECTO
Durante las primeras fases del proyecto del prototipo de un buque de guerra es
imprescindible conocer con cierta aproximación y fiabilidad su comportamiento en la
mar. Para ello existen varios índices cuya determinación puede llevarse a cabo
gráficamente o por cálculo. A pesar de su laboriosidad, evita en un alto porcentaje
encontrarse con desagradables sorpresas que casi nunca tienen remedio. Las posibles
modificaciones a aplicar en un proyecto muy avanzado o en el buque ya construido,
para paliar las consecuencias, son de coste muy elevado.
TABLA X
Aeronave Buque Toma/Despegue Balance/Cabezada Máximos (grados)
Velocidad máxima del viento (nudos)
Altura de la ola (metros)
Helicóptero H Fragata F Nocturna ± 6 / ± 3 30 3
Helicóptero H Fragata F Nocturna ± 8 / ± 3 40 5,5
Helicóptero H Fragata F Diurna ± 8 / ± 3 45 5,5

119
Los principales índices son:
El Factor de Mérito de Bales (SRF, Bales’s Seakeeping Rank Factor)
La Eficacia Operativa (OE, Operational Effectiveness)
El Índice de Operatividad (OI, Operability Index)
Los índices de la capacidad para ejecutar las misiones asignadas, ICEM
(SPI, Seakeeping Performance Index)
IV. 49.- EL FACTOR DE MÉRITO DE BALES
Con el fin de tener una primera idea rápida que permita desechar carenas con
deficiente comportamiento en la mar en la fase de viabilidad del proyecto, Nathan K.
Bales, buscando óptimas formas de carenas, dio a conocer en 1980 los resultados
obtenidos de los ensayos de veinte buques reales, fragatas y destructores, a los que
evaluó según su comportamiento en la mar. Analizó los movimientos de los veinte
buques en el plano vertical, calculando los ocho parámetros representados en la figura
19, a cinco velocidades y en cinco Estados de la Mar, con mar tendida de proa, es decir,
obtuvo doscientos valores por cada buque.
El factor de mérito R, descrito en la referencia (2) es la media de los valores RMS
normalizados de las ocho cantidades siguientes relacionadas con el movimiento del
buque:
El cabeceo
Movimiento de arfada del centro de gravedad longitudinal GL
Movimiento relativo de la Sección 0
Aceleración absoluta de la Sección 0
Parámetro de slamming en la Sección 3
Aceleración de arfada
Movimiento absoluto en la Sección 20
Movimiento relativo en la Sección 20
Estas cantidades fueron calculadas utilizando la Teoría de Rebanadas
convencional. El parámetro de slamming descrito en las referencias (2) y (6) está
relacionado con la probabilidad de que se produzca slamming. En la figura 42.IV se
representan los ocho parámetros relacionados con los movimientos del buque.
Figura 42.IV

120
Finalmente el cálculo del factor de mérito de Bales se funda en una ecuación de
regresión lineal múltiple que relaciona las ocho cantidades anteriores relacionadas con
los movimientos de los buques. Dicha ecuación para buques de 4300 t es:
�̂� = 8,422 + 45,104. 𝐶𝑊𝐹 + 10,078. 𝐶𝑊𝐴 − 8,465. 𝑇/𝐿 +
+1,273. 𝑐/𝐿 − 23,501. 𝐶𝑊𝑃𝐹 − 15,875.𝐶𝑉𝑃𝐴
Es decir, �̂� depende del siguiente grupo de parámetros:
CWF es el coeficiente de la flotación, de proa
CWA es el coeficiente de la flotación, de popa
CVPF es el coeficiente prismático vertical, a proa de la sección media
CVPA es el coeficiente prismático vertical, a popa de la sección media
c/L es la relación entre la distancia c desde la perpendicular de proa hasta el punto
donde la quilla se eleva desde la Línea Base y la eslora en la flotación
T/L es la relación entre el calado a plena carga y la eslora en la flotación
R es el factor de mérito calculado
�̂� es el factor de mérito estimado
Estudios posteriores realizados por Walden demostraron que el término 1,273 c/L
supone para el valor de �̂�, aproximadamente un incremento de la unidad, por lo que,
debido a la dificultad que supone precisar c y L en la fase de Viabilidad del proyecto, es
preferible la simplificación admisible de eliminar el citado término y sumar la unidad al
término constante, el cual quedará con el valor 9,422.
Para determinar los coeficientes CWF, CWA, CVPF y CVPA es necesario recurrir al
segundo grupo de parámetros siguientes, cuyos valores se utilizan en las primeras fases
del proyecto:
𝚫, desplazamiento a plena carga
L, eslora en la flotación
B, manga de trazado
T, calado a plena carga
CB, coeficiente de bloque
CP, coeficiente prismático
CX, coeficiente de la sección media, dado por 𝐶𝑊×𝐶𝑉𝑃
𝐶𝑃=
𝐴𝑀
𝐵×𝑇
Las fórmulas que relacionan ambos grupos de parámetros dependen del tipo de
carena de las tres que a continuación se definen:
1. Carena Convencional, que es la diseñada para la potencia óptima correspondiente
a la velocidad de crucero de 20 nudos.
2. Carena Alargada, diseñada para obtener 27 nudos de velocidad sostenida, con un
coeficiente prismático optimizado para lograr la mínima resistencia residual.
3. Carena modificada a partir de la Convencional para obtener características
óptimas de comportamiento en la mar.
En la figura 44.IV se representa un ejemplo de optimización de una carena
convencional para obtener un buen comportamiento en la mar.

121
Figura 43.IV
En la Tabla XI se dan los principales valores de los parámetros que intervienen en
el factor de mérito para las tres carenas anteriores.
TABLA XI
Coeficientes Carena 1 Carena 2 Carena 3
CW 0,73CP + 0,29 0,73CP + 0,32 0,73CP + 0,35
CWF 1,34CW – 0,388
CWA 0,375CW + 0,608
CVPF 0,70CVP + 0,328 0,70CVP + 0,278
CVPA CVP - 0,104 CVP - 0,054
Por otra parte, McCreight llevó a cabo un estudio de un total de 180 carenas (45
con cuatro desplazamientos por cada una) en el que llegó a obtener los valores de R en
correlación con las ocho cantidades relacionadas con el movimiento de la figura 42.IV,
deducidas de las citadas carenas. Como conclusiones expuso que:
Hay una alta correlación entre el cabeceo y la arfada con R, es decir, que un buque
con un elevado valor de R tendrá un movimiento reducido de cabeceo y de arfada.
El movimiento relativo en la sección 20 tiene una correlación despreciable con R,
significando que si se precisa un buque con reducido movimiento relativo en la
sección 20 la elección de una carena con elevado valor de R no mejorará esta
característica.
El parámetro de slamming y el movimiento relativo en la sección 0 muestran una
correlación menor con R que las otras cantidades.
Con el aumento de la eslora mejora el valor de R y se reducen los movimientos
absolutos excepto para el movimiento relativo en la sección 20 con lo cual, el
buque se acopla menos al movimiento de las olas.
Existe relativamente baja correlación entre el calado y los movimientos, excepto
para el caso del slamming, es decir, el aumento del calado correlaciona más
fuertemente con la reducción del slamming que con el resto de los movimientos.
En general, la mejora del factor de mérito y la reducción de los movimientos
correlacionan con el aumento de la eslora, de la manga, del calado, de CW, CP, y
del desplazamiento. Por el contrario, correlacionan con la disminución de CVP, CB
y CM (coeficiente de la Sección Media).

122
La fórmula de Bales da resultados fiables para sacar conclusiones generales
respecto de las cualidades marineras que tendrá el buque en proyecto, pero no
proporciona datos precisos de los que poder estimar valores orientativos de OI y SPI.
Basándose en ciertos criterios como los valores límite de la amplitud de los
movimientos habituales del buque en el desempeño de ciertas funciones, así como la
frecuencia de los embarques de agua y de los impactos hidrodinámicos (slamming) se
han publicado en los años de 1980 valores numéricos de los índices OI y SPI. Estos
valores (de OI cuando se trata de un determinado estado de la mar y de SPI cuando se
valora la suma de varios OI para todos los Estados de la Mar), fueron determinados
basándose en una distribución igual de velocidades y rumbos.
Para poder establecer una relación fiable entre �̂� y OI o SPI, es necesario disponer
de suficiente número de datos obtenidos bajo los mismos criterios a los dados en la
Tabla XI.
TABLA XII
Estados de la Mar Índice de Operatividad OI
1 1,00
2 1,00
3 1,00
4 0,0034 �̂� +0,096
5 0,022�̂� + 0,60 +(0,093-0,0063�̂�)×( 𝚫-7800)×10-3
6 0,161�̂� + 0,13 + (0, 0209 + 0,0042�̂�)×( 𝚫 – 7800)× 10-3
7 0,00
Los valores de OI en función de �̂� y del desplazamiento 𝚫 del buque, se resume en la Tabla XII en la que se observa lo siguiente:
Para Estados de la Mar 3 y menores, OI es constante y de valor máximo.
Para el estado de la mar 4, OI es independiente de 𝚫 pero depende de �̂�.
Para mares de estados 5 y 6, OI depende de �̂� y de 𝚫. Para mar de estado 7, OI es cero, cualquiera que sea el desplazamiento del
buque.
IV. 50.- LA EFICACIA OPERATIVA
Se define la eficacia operativa como la posibilidad de que un buque salga a la mar
y cumpla su misión cualesquiera que sean las condiciones ambientales que se pueda
encontrar.
En valores numéricos podemos expresar la eficacia operativa como la proporción
de tiempo que el buque cumple con éxito su misión en una combinación dada de zonas
de la mar y estaciones del año. La eficacia operativa puede por lo tanto ser utilizada
como un criterio para comparar entre sí el comportamiento en la mar de dos proyectos
diferentes.
Se suponen conocidos los valores límite de las respuestas o características de
estabilidad de un determinado buque, denominados criterios. Si situamos al buque en
un escenario de mar agitada y combinamos las condiciones del mal tiempo con la
velocidad y el rumbo del buque, podremos llegar a saber si éste cumplirá una misión

123
particular y en qué condiciones lo hará. Generalizando el cálculo para incluir todas las
combinaciones posibles de zonas de la mar, estación del año, dirección de propagación
de la ola principal, altura de la ola significante, periodo modal, velocidad y rumbo del
buque, podremos calcular la Eficacia Operativa como el porcentaje del tiempo durante
el cual la misión es posible.
El método del cálculo de la Eficacia Operativa fue dado a conocer por Andrew,
Loader y Peen en 1984 y posteriormente publicado por A.R.J.M. Lloyd. Por nuestra
parte lo aplicaremos preferentemente a los buques de guerra, utilizando la versión de
buque mercante solamente como referencia comparativa. Para facilitar el cálculo se
utilizará en general, el diagrama de esparcimiento de la figura 44.IV.
Cada celdilla inicial, seguida de las restantes, define el escenario en el que se
encuentra el buque, el cual, al final del recorrido dará una respuesta propia de su
comportamiento. Esta respuesta comparada con los criterios operativos y las exigencias
de las Especificaciones de Contrato proporcionarán la calificación uno o cero si el
buque las cumple o no las cumple, respectivamente.
Figura 44.IV
El objetivo del cálculo es, por lo tanto determinar, en primer lugar, la proporción de
tiempo que el buque permanece en cada estación, navegando por una cierta zona, en
donde el perfil de una ola irregular refleja un periodo determinado de cruce por cero,
con una altura de ola significante, para un rumbo y una velocidad dados del buque, así
como la dirección de propagación de la ola principal. La citada proporción de tiempo
estará dada por el producto:
𝑃 = 𝑓𝑒𝑠𝑡𝑎𝑐𝑖ó𝑛 × 𝑓𝑧𝑜𝑛𝑎 × 𝑓𝜒 × 𝑓𝑇𝐻 × 𝑓𝑟𝑢𝑚𝑏𝑜 × 𝑓𝑣 (176)
donde:
𝑓𝑒𝑠𝑡𝑎𝑐𝑖ó𝑛es la distribución de frecuencia del tiempo que el buque está en la mar durante
la estación considerada.
𝑓𝑧𝑜𝑛𝑎 es la distribución de frecuencia condicional de las zonas de la mar durante una
determinada estación.

124
𝑓𝜒 es la distribución de frecuencia condicional de la dirección de propagación de la
ola principal respecto de la dirección Norte durante una estación y en una zona
determinada.
𝑓𝑇𝐻 es la distribución de frecuencia conjunta condicional de los períodos medios de
cruce por cero y las alturas de olas significantes, para una zona dada, estación y
dirección de propagación de la ola principal.
𝑓𝑟𝑢𝑚𝑏𝑜 es la distribución de frecuencia de los rumbos del buque relativos al Norte.
𝑓𝑣 es la distribución de frecuencia condicional de la velocidad del buque para un
determinado rumbo.
Se define la distribución de frecuencia condicional (DFC) como la proporción de
tiempo empleado durante una determinada condición cuando otra permanece
constante. Por ejemplo, 𝑓𝑧𝑜𝑛𝑎 es la proporción de tiempo empleado en una zona
determinada durante una estación dada.
Finalmente hay que calcular las n respuestas del buque (rn; n = 1,2,…N) de
relevancia para la misión, como se verá más adelante.
El cálculo de la Eficacia Operativa de un buque, es un proceso arduo ya que
requiere disponer de una amplia base de datos, de un equipo de personal experimentado
en la elaboración de estadísticas y de programas de ordenador fiables. Tal y como
representa el diagrama de esparcimiento de la figura 44.IV, es fundamental seguir un
orden que garantice un resultado final en el que se hayan tenido en cuenta todos los
parámetros implicados.
IV. 50.1.- VARIACIONES GEOGRÁFICAS Y ESTACIONALES
Para un buque mercante es fundamental especificar en qué estaciones operará y
además determinar la distribución de frecuencia condicional,𝑓𝑒𝑠𝑡𝑎𝑐𝑖ó𝑛 , es decir, el
porcentaje del tiempo que navegará en cada estación del año. Estos porcentajes varían
significativamente para cada tipo de buque, por ejemplo entre un petrolero y un buque
de cruceros de lujo.
Sin embargo, el buque de guerra debe desempeñar su misión durante todo el año de
forma continua, por lo que la distribución de su frecuencia condicional estará repartida
equitativamente entre las cuatro estaciones del año.
En la Tabla XIII se puede ver un ejemplo comparativo.
TABLA XIII
DISTRIBUCIÓN DE LA FRECUENCIA CONDICIONAL festación
Primavera Verano Otoño Invierno
Buque de Crucero 0,30 0,50 0,20 0
Buque de guerra 0,25 0,25 0,25 0,25
Especificada la 𝑓𝑒𝑠𝑡𝑎𝑐𝑖ó𝑛 , el paso siguiente es para definir las zonas de la mar en las
que el buque tendrá que operar en cada estación.
Un buque de guerra del tipo fragata o superior deberá estar capacitado para operar
en cualquier zona de la mar durante las cuatro estaciones del año por lo que el cálculo

125
de su Eficacia Operativa partirá en el diagrama de la figura 44.IV desde el plano
𝑇𝑧 , �̅�1/3. En la Tabla XIV se ve la distribución de frecuencia condicional de una fragata
operando en el Atlántico Norte. Durante la primavera, el verano y el otoño dedica la
mayor parte del tiempo a operar en las zonas 1, 3 y 4. En invierno concentra su tiempo
en las zonas 9 y 11.
Para un buque tipo corbeta o para una Patrullera Clase BAM (Buque de Acción
Marítima) cuyas misiones consisten en realizar vigilancias y defensa de aguas
territoriales o alejadas de ellas en tareas de larga duración, el cálculo de su Eficacia
Operativa partirá del inicio del diagrama de esparcimiento.
Figura 45.IV
Por ejemplo, si una Patrullera clase BAM debe realizar durante un año la misión de
vigilancia entre Canarias y Mauritania correspondientes a las zonas 25 y 36
representada en la figura 45.IV, su distribución de frecuencia condicional será la de la
Tabla XV:
TABLA XIV
DISTRIBUCIÓN DE FRECUENCIA CONDICIONAL PARA UNA FRAGATA EN EL
ATLÁNTICO NORTE
ZONA
BUQUE DE GUERRA
Primavera Verano Otoño Invierno
1 0,20 0,20 0,20 0,05
3 0,30 0,30 0,20 0,20
4 0,30 0,30 0,30 0,10
8 0,05 0,05 0,10 0,10
9 0,05 0,05 0,10 0,25
11 0,10 0,10 0,10 0,30
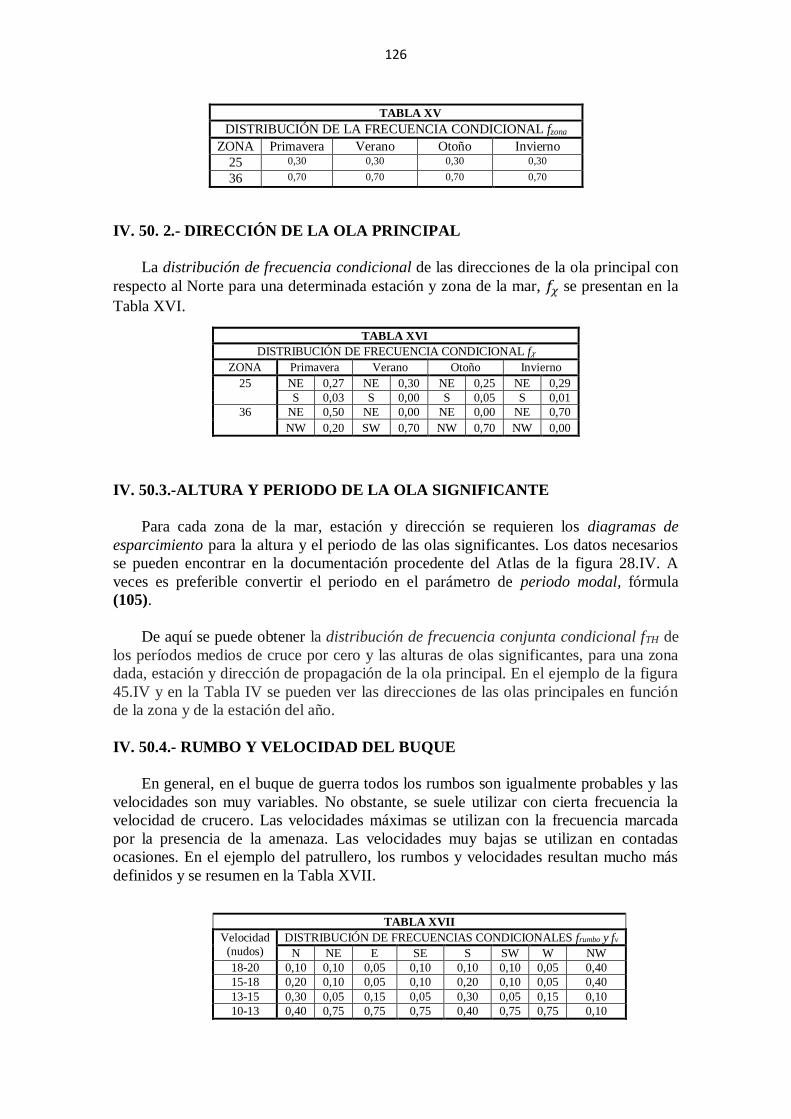
126
IV. 50. 2.- DIRECCIÓN DE LA OLA PRINCIPAL
La distribución de frecuencia condicional de las direcciones de la ola principal con
respecto al Norte para una determinada estación y zona de la mar, 𝑓𝜒 se presentan en la
Tabla XVI.
IV. 50.3.-ALTURA Y PERIODO DE LA OLA SIGNIFICANTE
Para cada zona de la mar, estación y dirección se requieren los diagramas de
esparcimiento para la altura y el periodo de las olas significantes. Los datos necesarios
se pueden encontrar en la documentación procedente del Atlas de la figura 28.IV. A
veces es preferible convertir el periodo en el parámetro de periodo modal, fórmula
(105).
De aquí se puede obtener la distribución de frecuencia conjunta condicional fTH de
los períodos medios de cruce por cero y las alturas de olas significantes, para una zona
dada, estación y dirección de propagación de la ola principal. En el ejemplo de la figura
45.IV y en la Tabla IV se pueden ver las direcciones de las olas principales en función
de la zona y de la estación del año.
IV. 50.4.- RUMBO Y VELOCIDAD DEL BUQUE
En general, en el buque de guerra todos los rumbos son igualmente probables y las
velocidades son muy variables. No obstante, se suele utilizar con cierta frecuencia la
velocidad de crucero. Las velocidades máximas se utilizan con la frecuencia marcada
por la presencia de la amenaza. Las velocidades muy bajas se utilizan en contadas
ocasiones. En el ejemplo del patrullero, los rumbos y velocidades resultan mucho más
definidos y se resumen en la Tabla XVII.
TABLA XV
DISTRIBUCIÓN DE LA FRECUENCIA CONDICIONAL fzona
ZONA Primavera Verano Otoño Invierno
25 0,30 0,30 0,30 0,30
36 0,70 0,70 0,70 0,70
TABLA XVI
DISTRIBUCIÓN DE FRECUENCIA CONDICIONAL fχ
ZONA Primavera Verano Otoño Invierno
25 NE 0,27 NE 0,30 NE 0,25 NE 0,29
S 0,03 S 0,00 S 0,05 S 0,01
36 NE 0,50 NE 0,00 NE 0,00 NE 0,70
NW 0,20 SW 0,70 NW 0,70 NW 0,00
TABLA XVII
Velocidad (nudos)
DISTRIBUCIÓN DE FRECUENCIAS CONDICIONALES frumbo y fv
N NE E SE S SW W NW
18-20 0,10 0,10 0,05 0,10 0,10 0,10 0,05 0,40
15-18 0,20 0,10 0,05 0,10 0,20 0,10 0,05 0,40
13-15 0,30 0,05 0,15 0,05 0,30 0,05 0,15 0,10
10-13 0,40 0,75 0,75 0,75 0,40 0,75 0,75 0,10
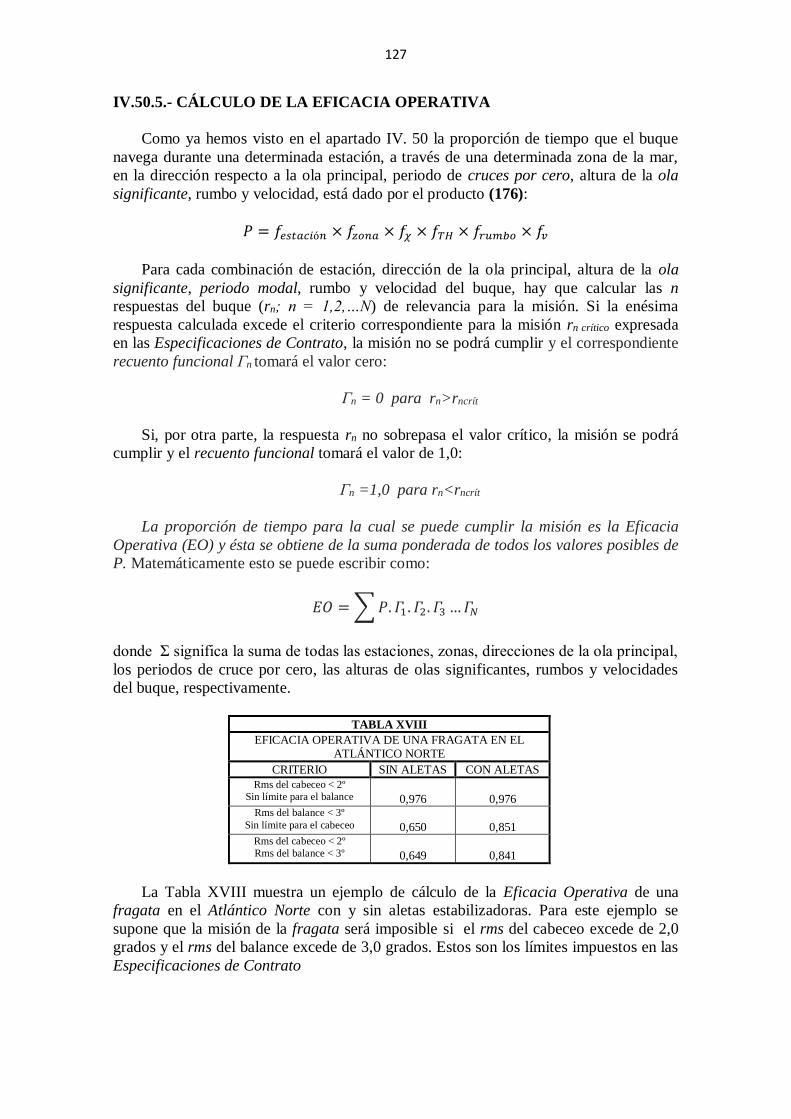
127
IV.50.5.- CÁLCULO DE LA EFICACIA OPERATIVA
Como ya hemos visto en el apartado IV. 50 la proporción de tiempo que el buque
navega durante una determinada estación, a través de una determinada zona de la mar,
en la dirección respecto a la ola principal, periodo de cruces por cero, altura de la ola
significante, rumbo y velocidad, está dado por el producto (176):
𝑃 = 𝑓𝑒𝑠𝑡𝑎𝑐𝑖ó𝑛 × 𝑓𝑧𝑜𝑛𝑎 × 𝑓𝜒 × 𝑓𝑇𝐻 × 𝑓𝑟𝑢𝑚𝑏𝑜 × 𝑓𝑣
Para cada combinación de estación, dirección de la ola principal, altura de la ola
significante, periodo modal, rumbo y velocidad del buque, hay que calcular las n
respuestas del buque (rn; n = 1,2,…N) de relevancia para la misión. Si la enésima
respuesta calculada excede el criterio correspondiente para la misión rn crítico expresada
en las Especificaciones de Contrato, la misión no se podrá cumplir y el correspondiente
recuento funcional Γn tomará el valor cero:
Γn = 0 para rn>rncrít
Si, por otra parte, la respuesta rn no sobrepasa el valor crítico, la misión se podrá
cumplir y el recuento funcional tomará el valor de 1,0:
Γn =1,0 para rn<rncrít
La proporción de tiempo para la cual se puede cumplir la misión es la Eficacia
Operativa (EO) y ésta se obtiene de la suma ponderada de todos los valores posibles de
P. Matemáticamente esto se puede escribir como:
𝐸𝑂 = ∑𝑃. 𝛤1. 𝛤2. 𝛤3 …𝛤𝑁
donde Σ significa la suma de todas las estaciones, zonas, direcciones de la ola principal,
los periodos de cruce por cero, las alturas de olas significantes, rumbos y velocidades
del buque, respectivamente.
TABLA XVIII
EFICACIA OPERATIVA DE UNA FRAGATA EN EL ATLÁNTICO NORTE
CRITERIO SIN ALETAS CON ALETAS
Rms del cabeceo < 2º
Sin límite para el balance
0,976
0,976 Rms del balance < 3º
Sin límite para el cabeceo
0,650
0,851 Rms del cabeceo < 2º
Rms del balance < 3º
0,649
0,841
La Tabla XVIII muestra un ejemplo de cálculo de la Eficacia Operativa de una
fragata en el Atlántico Norte con y sin aletas estabilizadoras. Para este ejemplo se
supone que la misión de la fragata será imposible si el rms del cabeceo excede de 2,0
grados y el rms del balance excede de 3,0 grados. Estos son los límites impuestos en las
Especificaciones de Contrato

128
Considerando en primer lugar los movimientos aislados del cabeceo, vemos que el
buque es capaz de llevar a cabo su misión casi todo el tiempo. Los estabilizadores de
balance, por supuesto, no tienen influencia sobre este resultado. Los movimientos de
balance tienen un efecto mucho más grande sobre la posibilidad del buque para llevar a
cabo su misión y el buque no estabilizado es eficaz durante poco más que la mitad del
tiempo. Estos efectos son mitigados considerablemente por las aletas estabilizadoras.
IV.51.- EL ÍNDICE DE OPERATIVIDAD
El valor del Índice de Operatividad para cada estado de la mar depende de los
rumbos y velocidades más probables. Si pi es la probabilidad local dentro de cada área
elemental en la que la misión del buque se pueda llevar a cabo. Si pv y pr son las
fracciones de tiempo que el buque navegará a cada combinación de velocidad y rumbo,
respectivamente, se tendrá:
𝑂𝐼 = ∑∑𝑝𝑖 × 𝑝𝑣 × 𝑝𝑟
𝑟𝑣
El Índice de Operatividad (OI, Operability Index) se define como el porcentaje de
tiempo durante el cual el buque está operativo. Depende de las olas de la zona del
océano por la que el buque navega, de la respuesta dinámica del buque entre las olas y
de la misión del buque.
IV. 52.- LOS ÍNDICES DE LA CAPACIDAD PARA EJECUTAR LAS
MISIONES ASIGNADAS (SPI, SEAKEEPING PERFORMANCE INDEX)
Este concepto comprende dos índices:
1. El Índice de la Capacidad para Ejecutar las Misiones Asignadas ICEM
(Seakeeping Performance Index o Ship Performance Index, SPI).
2. El Índice SPI-1
El Índice de la Capacidad para Ejecutar las Misiones Asignadas ICEM (SPI), mide
la efectividad de la misión y se define como el tiempo que un buque de guerra en cada
situación de carga, puede llevar a cabo determinadas misiones operativas a
velocidades y rumbos diversos en zonas de los océanos y en Estaciones especificadas.
Se calcula sumando los valores del OI (Operability Index) correspondientes a las
funciones del buque, ponderadas respecto a la frecuencia de ocurrencia de los Estados
de la Mar (EM) en la zona donde se llevarán a cabo aquellas funciones y representadas
por el factor PS. El valor de SPI será el que corresponda a esas funciones.
Si la evaluación ha de abarcar un cierto número de funciones propias del tipo de
buque, se deberá introducir un nuevo factor IR que representa la importancia relativa de
cada función o Capacidad Operativa Requerida (ROC, Required Operational
Capability). Por ejemplo: en navegación normal de tránsito, IR = 0,40; en la función de
escucha sonar, o Guerra Antisubmarina (ASW) IR = 0,25; en operaciones con
helicópteros, Guerra Antiaérea (AAW) o Guerra Anti-superficie (ASU) IR = 0,25. En
general:

129
𝐼𝐶𝐸𝑀 = 𝑆𝑃𝐼 = ∑ ∑𝑂𝐼 × 𝑃𝑆 × 𝐼𝑅𝐸𝑀𝐶𝑂𝑅
El Índice de la Capacidad para Ejecutar las Misiones Asignadas ICEM-1(SPI-1),
se define como la relación entre el tiempo que el buque necesita para ir desde uno a
otro punto con mar en calma y el tiempo real en condiciones ambientales especificadas.
Este índice valora únicamente las misiones de tránsito o navegación normal entre
dos puntos. Su aplicación al proyecto del buque de guerra tiene interés cuando se trata
de obtener el tiempo mínimo de navegación entre dos puntos.
En el proceso del diseño del prototipo de un buque de guerra una Oficina Técnica
de prestigio debe ser capaz de evaluar las características de navegabilidad para un grupo
de carenas seleccionadas en las primeras etapas del diseño, de tal forma que dichas
carenas cumplan los requisitos exigidos al nuevo proyecto y de ellas seleccionar a la de
superior comportamiento en la mar y con el menor coste del ciclo de vida, si bien estas
dos propiedades son a menudo difíciles de compaginar.
El resultado de este estudio se puede representar como el porcentaje de tiempo que
un buque puede llevar a cabo una misión determinada en un escenario operativo real
sin que se degrade su efectividad, es decir, con un determinado Índice de Operatividad
(OI).
Este complejo análisis ha sido realizado en diversas ocasiones con la común
utilización de los Índices de Operatividad para conseguir unos resultados de exactitud
razonable y en formato que facilite la evaluación. Los principales elementos y supuestos
de partida son:
Modelización matemática de las respuestas a los Estados de la Mar de la carena en
estudio.
Programa de ordenador para determinar los movimientos del buque y la evaluación
de su comportamiento en la mar.
Dependiendo de las zonas de operación del buque en estudio será preciso analizar
su comportamiento ante las distintas formas espectrales de cada zona, las cuales
varían según las condiciones ambientales y geográficas de los distintos mares y
océanos del Planeta. Para un buque de guerra que haya de operar en cualquier zona,
se utiliza la familia espectral de Bretschneider. En otros casos para ciertas zonas
concretas se suelen utilizar los espectros Pierson-Moskowitz, Jonswap y Ochi-
Hubble.
IV.53.- ANÁLISIS DE LA CAPACIDAD DEL BUQUE PARA EJECUTAR LAS
MISIONES QUE TIENE ASIGNADAS
IV.53.1.- CASO DE BUQUES EN GENERAL
El comportamiento en la mar representa de hecho la respuesta dinámica del buque
en mar agitada y muy a menudo es un factor limitador de la operatividad del buque la
cual se puede definir como la posibilidad del buque de llevar a cabo con seguridad sus
misiones.

130
La relación entre la operatividad del buque y las características de su misión se
establece por las especificaciones para el comportamiento en la mar, las cuales
exponen los límites aceptables operativos. Las cualidades marineras de un buque en
una zona del océano se pueden cuantificar por un Índice de Operatividad, el cual mide
la degradación de la posibilidad del buque para llevar a cabo su misión, comparada
con la condición de la mar en calma.
En el análisis de la capacidad del buque para ejecutar las misiones que tiene
asignadas, se deben combinar tres elementos principales:
Las características del buque
Las misiones y las funciones necesarias para realizar con eficacia estas
misiones
El ambiente marino especificado en el cual el buque ha de llevar a cabo sus
misiones.
En la representación esquemática de la figura 48.IV se ven los factores que se
consideran importantes para el mencionado análisis así como las relaciones existentes
entre ellos. Se puede observar que el factor central es la predicción de la respuesta del
buque. El análisis finaliza con la determinación de la capacidad del buque para ejecutar
las misiones asignadas (seakeeping performance).
Figura 46.IV
Un método (Guedes Soares, Fonseca y otros) para conocer si un buque cumple con
lo exigido a su comportamiento en la mar, consiste en cuantificar sus cualidades
marineras. Para ello se debe llevar a cabo lo siguiente:
En primer lugar, la evaluación de las respuestas del buque en olas regulares. Esto
consiste en el cálculo de los movimientos oscilatorios del buque como cuerpo
rígido, sus movimientos y aceleraciones.
En segundo lugar es necesario considerar al buque en una mar real para
establecer su comportamiento y determinar los parámetros explícitos de diseño.

131
La metodología para calcular la capacidad de un determinado buque para ejecutar
las misiones asignadas se basa en el método espectral. De acuerdo con él, los
parámetros relevantes que caracterizan el comportamiento del buque se consideran
como funciones de la varianza del espectro de respuesta, el cual, a su vez, depende del
espectro de energía del estado de la mar y de la función de transferencia del buque.
Para la aplicación de la metodología a un determinado buque, se deberán conocer
sus características principales (las dimensionales, el desplazamiento, la posición de su
CG y la velocidad en servicio), el plano de formas y las zonas de la mar de su ruta. El
cálculo de la capacidad del buque para ejecutar las misiones asignadas se divide en
cuatro etapas:
En la primera etapa se calculan las funciones de transferencia de los
movimientos del buque absolutos y las respuestas derivadas de ellos:
aceleraciones verticales y laterales y los movimientos relativos. En la práctica es
suficiente realizar lecturas para valores del rumbo, μ, a intervalos de 30º, es
decir, para siete lecturas. Los cálculos hidrodinámicos se llevan a cabo mediante
un programa de ordenador basado en la Teoría de Rebanadas, el cual calcula los
coeficientes hidrodinámicos, las funciones de transferencia, la aceleración
vertical y el resto de los movimientos del buque. Estos cálculos no son posibles
sin conocer los datos del buque que se está analizando.
Figura 47.IV
Los resultados dan lugar a presentar las funciones de transferencia de las
aceleraciones de la arfada y la aceleración vertical en un determinado punto del
buque (por ejemplo en el puente, en la proa, en la zona de maniobra de
helicópteros, etc.). El gráfico de la figura 49.IV representa, como ejemplo, las
amplitudes adimensionales en ordenadas y en abscisas la longitud de onda
dividida por la eslora entre perpendiculares.
Los criterios están definidos en función de la probabilidad de ocurrencia
permitida (prob). Se supone que el embarque de agua sobre cubierta ocurre
cuando el movimiento relativo es mayor que el francobordo en la proa. Un
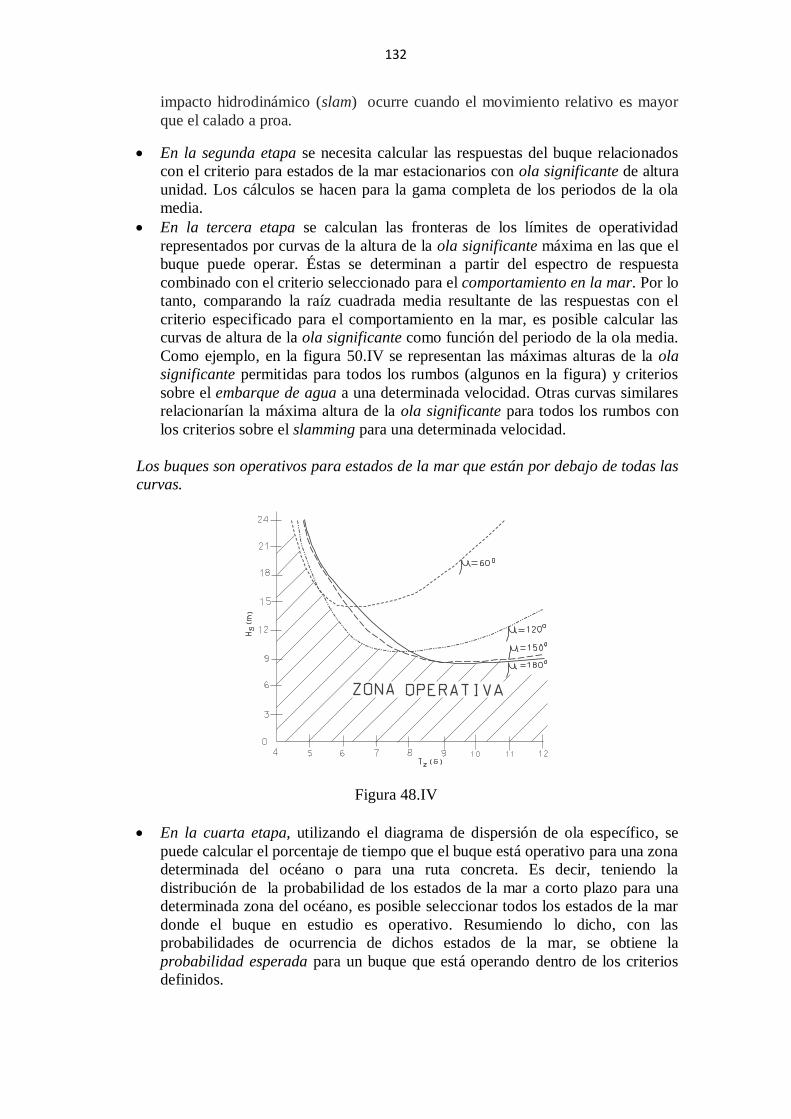
132
impacto hidrodinámico (slam) ocurre cuando el movimiento relativo es mayor
que el calado a proa.
En la segunda etapa se necesita calcular las respuestas del buque relacionados
con el criterio para estados de la mar estacionarios con ola significante de altura
unidad. Los cálculos se hacen para la gama completa de los periodos de la ola
media.
En la tercera etapa se calculan las fronteras de los límites de operatividad
representados por curvas de la altura de la ola significante máxima en las que el
buque puede operar. Éstas se determinan a partir del espectro de respuesta
combinado con el criterio seleccionado para el comportamiento en la mar. Por lo
tanto, comparando la raíz cuadrada media resultante de las respuestas con el
criterio especificado para el comportamiento en la mar, es posible calcular las
curvas de altura de la ola significante como función del periodo de la ola media.
Como ejemplo, en la figura 50.IV se representan las máximas alturas de la ola
significante permitidas para todos los rumbos (algunos en la figura) y criterios
sobre el embarque de agua a una determinada velocidad. Otras curvas similares
relacionarían la máxima altura de la ola significante para todos los rumbos con
los criterios sobre el slamming para una determinada velocidad.
Los buques son operativos para estados de la mar que están por debajo de todas las
curvas.
Figura 48.IV
En la cuarta etapa, utilizando el diagrama de dispersión de ola específico, se
puede calcular el porcentaje de tiempo que el buque está operativo para una zona
determinada del océano o para una ruta concreta. Es decir, teniendo la
distribución de la probabilidad de los estados de la mar a corto plazo para una
determinada zona del océano, es posible seleccionar todos los estados de la mar
donde el buque en estudio es operativo. Resumiendo lo dicho, con las
probabilidades de ocurrencia de dichos estados de la mar, se obtiene la
probabilidad esperada para un buque que está operando dentro de los criterios
definidos.

133
Esta probabilidad representa el Índice de Comportamiento en la Mar (Seakeeping
Index). Este índice significa el porcentaje de tiempo durante el cual las respuestas del
buque están por debajo de las fijadas por el criterio establecido.
IV.53.2.- CASO DE BUQUES DE GUERRA
Los elementos principales que se deben combinar con el fin de evaluar el
desempeño del comportamiento en la mar del buque de guerra son los mismos ya
enunciados en el apartado IV.54.1, pero existen notables diferencias que se aclararán.
En primer lugar el diagrama de la figura 48.IV debe ser ampliado con dos nuevos
conceptos, figura 49.IV: la sensibilidad del buque y la susceptibilidad de los sistemas
para la degradación por movimiento.
Aunque el análisis del Índice de la Capacidad para Ejecutar las Misiones
Asignadas, ICEM, también se centra en la predicción de la respuesta del buque, esta
para el buque de guerra, se compone, por una parte, de la propia sensibilidad del buque
y, por otra parte, es función de la influencia de la mar sobre él. En otras palabras, la
velocidad y el rumbo son tan importantes para la predicción de respuesta como el
viento y las olas.
Figura 49.IV
Para determinar si el valor de la respuesta de un buque es adecuado hay que
determinar la susceptibilidad de los equipos de a bordo que le proporcionan la
Requerida Capacidad Operativa (ROC, Required Operational Capability). Es decir,
como resultado de tener que responder a los estados de la mar, su movimiento tiende a
degradar la capacidad de todos los equipos y sistemas instalados en el buque.
Esta degradación podría, por ejemplo, consistir en una pérdida de velocidad en mar
agitada, como resultado de la resistencia añadida (reducción de velocidad involuntaria)
o como el resultado de excesivos movimientos de arfada y cabeceo que causan
frecuentes slamming y embarques de agua lo que puede obligar al Comandante a
reducir la velocidad del buque (reducción de velocidad voluntaria). Otra forma de
degradación de la capacidad operativa estaría relacionada con la disminución de la
capacidad de maniobra de un helicóptero. Es importante también el impacto de los

134
movimientos del buque en la tripulación lo cual menoscaba su capacidad para realizar
sus funciones con el nivel de eficacia requerido en combate.
Como ejemplos de conclusiones sobre la degradación de la capacidad de los buques
de guerra para ejecutar las misiones asignadas se pueden citar:
El Índice de la Capacidad para Ejecutar las Misiones Asignadas, ICEM, se
degrada a medida que disminuye el desplazamiento.
En los Portaaviones, que el embarque de agua en los ascensores puede ser un
factor importante de degradación cuanto menor sea el francobordo.
El movimiento de balance también puede ser un importante factor de
degradación para Portaaviones con desplazamientos inferiores a 60.000
toneladas.
En buques con desplazamientos menores de 20.000 toneladas se deben instalar
aletas estabilizadoras activas.
Una consideración importante a tener en cuenta es el hecho de que los diversos
estados de la mar, las distintas velocidades, los rumbos, así como las Capacidades
Operativas Necesarias (ROC), no son igualmente probables. Por lo tanto, el Índice de la
Capacidad para Ejecutar las Misiones Asignadas, ICEM, para un determinado buque,
teniendo en cuenta el conjunto específico de sus circunstancias y condiciones, tiene que
ser ponderado posteriormente con el fin de asegurarse que se consigue un equilibrio
óptimo en lo que se refiere al rendimiento total del buque.
IV.53.3.- ANÁLISIS DE LOS REQUERIMIENTOS
Como la mayor atención para obtener el ICEM de un buque de guerra se centra en
la evaluación de los efectos adversos del viento y las olas sobre sus misiones, es
necesario disponer de un cuadro como el de la figura 50.IV. En él se relacionan las
misiones típicas que deben llevar a cabo los buques de combate, ofreciendo una visión
general de ellas divididas en dos tipos: misiones fundamentales (a la izquierda del
cuadro) y misiones de apoyo (situadas a la derecha). Dependiendo del tipo de buque
unas serán primarias y el resto secundarias.
MISIONES DE LOS BUQUES DE GUERRA
Antiaérea (AAW)
Antisubmarina (ASW)
Anti-superficie (ASU)
Asalto (STW)
Anfibia (AMW)
Minas (MIW)
Acciones Especiales (SPW)
Movilidad (MOB)
Mando y Control y Comunicaciones (CCC)
Inteligencia (INT)
Guerra Electrónica (ELW)
Logística (LOG)
Operaciones de Apoyo a la Flota (FSO)
Construcción (CON)
Misiones de Paz ((NCO)
Misiones Primarias Misiones Secundarias
Figura 50.IV

135
A la vista de lo que expresa la especificación existente de un determinado sistema
del buque, el primer paso del análisis del comportamiento en la mar, es decir, el
análisis de los requerimientos, debería ser sencillo. No obstante, en muchos casos el
significado correcto de los requerimientos para el comportamiento en la mar, todavía
no quedan claros ya que la degradación influye de forma diferente sobre cada sistema.
Por ejemplo, cuando la exigencia de un requerimiento dice que la capacidad de
funcionamiento del sistema ASW (Antisubmarine Warfare) debe ser del 80% en un
determinado estado de la mar, las apropiadas funciones de degradación o los límites
del movimiento puede que no estén suficientemente claras.
IV.54.- DESCRIPCIÓN DEL AMBIENTE MARINO
El fin perseguido con la descripción del ambiente marino es el de proporcionar al
Ingeniero Naval y Oceánico datos aceptables que le permitan durante el diseño obtener
una predicción de la respuesta del buque en las zonas de la mar en las que desarrollará
sus funciones.
La tabla XIX muestra un resumen típico. El ambiente marino se define en función
de las condiciones de la mar y de las estadísticas de ocurrencia. En la mayoría de los
casos solamente se estudian los movimientos del buque en estados de la mar 4, 5, 6 y 7.
El rendimiento de las operaciones en estados de la mar menores, en general, no se
consideran ya que las características del buque no se degradan hasta el punto en que sea
justificable el análisis. Para estados de la mar superiores al nivel 8, generalmente
tampoco se analizan porque la frecuencia de aparición de estos estados de la mar es
menor del uno por ciento. Para estos estados de la mar extremos, la fiabilidad
de la predicción del movimiento es muy baja y para tener una idea aproximada de la
navegabilidad en este ambiente se utilizan normalmente métodos deterministas. Para los
estados de la mar 4, 5, 6 y 7, se analizan tanto la situación en olas de cresta corta
(multidireccional) como en olas de cresta larga (unidireccional).
TABLA XIX
CONDICIONES DE LA MAR
Estado de la mar
Altura de la ola
significante (m)
Velocidad sostenida del viento (nudos)
Probabilidad de ocurrencia (%)
Periodo de la ola (s) Estado de la mar Probabilidad de
ocurrencia 5 7 9 11 13
4 1,98 18 32,9 43,4 14,0
5 3,11 22 31,7 32,1 50,9
6 5,15 29 29,9 29,6 24,6
7 9,33 38 21,2 33,8 10,4
La estadística de los periodos y de las alturas de la ola significante correspondiente
a cada uno de estos estados de la mar, se deducen de datos obtenidos por diversos
investigadores. La energía de la ola se obtiene usando la representación de
Bretschneider definida por estos pares de datos: altura de la ola significante y periodo.
La estadística de ocurrencia ambiental para estados de la mar 4, 5, 6 y 7 se utilizan
como funciones de ponderación. La velocidad media sostenida del viento está medida
durante 10 minutos tomada a 10 m sobre el Nivel Medio de la Mar (NMR).

136
IV.55.- CRITERIOS PARA VALORAR LA CAPACIDAD PARA EJECUTAR
LAS MISIONES ASIGNADAS
La medida básica se define como el porcentaje de capacidad retenida por el buque,
siendo el nivel del 100% la capacidad del comportamiento del buque navegando en
una mar en calma.
Figura 51.IV
Cuando se incrementa en intensidad la respuesta del buque, los efectos de la
degradación se incrementarán igualmente. Cada subsistema tendrá su propia función de
degradación. En la figura 51.IV, se ven las curvas correspondientes a cuatro
subsistemas, así como los dos puntos de especial interés, por ejemplo, para el
subsistema A: 1) El límite en el que se conserva la capacidad total y 2) Un límite más
allá del cual la capacidad del comportamiento del sistema podría ser considerada como
seriamente degradada.
TABLA XX
Subsistemas Parámetros límite para operaciones con aviones
Personal
Movimiento Límite Situación
Balance Cabezada
Aceleración vertical Aceleración horizontal
8º 3º
0,4g 0,2g
C. de G. C. de G. Puente Puente
Grupo de apoyo Balance Cabezada
3,5º 3,5º
C. de G. C. de G.
Casco Embarque de agua a proa
Slams (Quilla, Sección 3)
30/hr
20/hr
Sección 0
Sección 3
Casco Slams 20/hr Barbeta lateral
Ascensor aviones Embarque de agua 5/hr Parte baja arista de proa
En la Tabla XX se resumen como ejemplos los criterios para mantener la
capacidad para ejecutar misiones en la mar, para de un LHA (Amphibious Assault
Ships) y un Portaaviones.

137
IV. 56.- PREDICCIÓN DE LA RESPUESTA DEL BUQUE
Para predecir la respuesta del buque se necesitan dos datos principales:
1. Los valores cuantitativos de la sensibilidad del buque, esencialmente los
Operadores de Amplitud de Respuesta (RAO, Response Amplitude Operators).
2. Los valores cuantitativos de la excitación, es decir, las condiciones de la mar.
Como la cantidad de los cálculos necesarios para cada condición individual
(velocidad, rumbo, altura de la ola, periodo de la ola, etc.), es considerable, es
imprescindible disponer de alguno de los poderosos programas actuales.
Como la velocidad y el rumbo son las variables con mayor impacto sobre el ICEM,
la mejor forma de presentar los resultados del análisis es mediante el denominado
Gráfico Polar de Velocidad, como el de la figura 52.IV.
Figura 52.IV
De la misma forma que para conocer los grados de balance, también se preparan
otros gráficos polares para determinar los grados de cabeceo, y eventos como los
embarques de agua por hora, los slams por hora y la emersión del propulsor por hora.
Las velocidades constantes del buque se indican sobre los círculos concéntricos y
los rumbos de las olas respecto al rumbo constante del buque se muestran a lo largo de
los radios. Fijando la velocidad a la cual se excede un límite de un movimiento o
evento para cada rumbo, se pueden preparar los contornos del movimiento o evento,
similares a los mostrados y descritos en la figura.

138
La respuesta del buque por sí misma apenas tiene importancia para el análisis de la
capacidad del buque para desempeñar sus funciones. Lo que sí preocupa realmente es la
degradación de todos aquellos subsistemas que son susceptibles de ello por el
movimiento inducido.
El criterio sobre el Índice de la Capacidad para Ejecutar las Misiones Asignadas,
ICEM, asemeja la degradación permisible a los límites máximos aceptables para los
movimientos de respuesta del buque y además establece la relación entre la respuesta
del buque y/o el movimiento y la capacidad del sistema-buque.
Los diagramas polares pueden resultar útiles a bordo como información inmediata
sobre la operatividad del buque en diversos escenarios.
IV.57.- EVALUACIÓN GRÁFICA DE LA CAPACIDAD PARA EJECUTAR LAS
MISIONES ASIGNADAS
Una vez desarrollados: 1) la respuesta pronosticada del buque y 2) las respuestas
límite también llamados criterios para la ejecución de las misiones asignadas, la
evaluación de estos criterios se puede realizar desarrollando las Envolventes Operativas
del Comportamiento en la Mar, (Seakeeping Operating Envelopes, SOE) y ponderando
las condiciones individuales de acuerdo con la frecuencia de ocurrencia y las
conclusiones que se deduzca del SOE resultante se obtendrá la capacidad total
considerada (figura 53.IV).

139
Figura 53.IV
Con objeto de destacar los contornos que limitan la respuesta del buque, aquellas
regiones de las curvas del Diagrama Polar de Velocidad (es decir, aquellas
combinaciones de velocidad y rumbo) se sombrean donde se exceden los criterios
señalados para el SPI. Las SOE se desarrollan, como se ilustra en la figura 53.IV, para
cada condición de la mar (es decir, para cada combinación de la altura de ola
significante y periodo modal) y la Capacidad Operativa Requerida (Required
Operational Capability, ROC).
Como las SOE son un método gráfico, la evaluación del Índice de la Capacidad
para Ejecutar las Misiones Asignadas, SPI, requiere una medida cuantitativa concisa de
dicha capacidad. Los Índices de Operatividad, IO (Operability Indices, OI) se han
definido para cumplir este propósito.
Los IO (OI) expresan la capacidad en tanto por ciento de tiempo en el que el buque
está operativo para una condición determinada de la mar. Un IO(OI) del 100% indica
que es posible cualquier combinación de velocidad y rumbo sin exceder ninguno de los
criterios establecidos para limitar, en cada caso, la capacidad de ejecutar las misiones
asignadas.
Cuando las condiciones de mar son más severas, un porcentaje mayor y creciente
de combinaciones de velocidad y rumbo resultan inoperables (es decir, el área
sombreada del SOE es mayor). Con objeto de tener en cuenta la frecuencia de
ocurrencia de varias condiciones de mar y la importancia relativa de varios ROC, estos
IO (OI) se amplían para obtener una medida cuantitativa única del Índice de Capacidad
para Ejecutar las Misiones Asignadas (Seakeeping Performance Index, SPI). Un
ejemplo de aplicación de los métodos descritos se incluye en la Tabla XXI.

140
TABLA XXI
BUQUE
ÍNDICES DE OPERATIVIDAD
SPI
ESTADOS DE LA MAR
4 5 6
CV 100 99 69 91
LHA 99 94 62 86
SWATH 100 100 96 99
CV.- Multi-purposse Aircraft Carrier
LHA.- Amphibious Assault Ship
SWAT.- Small Waterplane Area Twin Hull
Estos métodos de evaluación se aplican durante el proyecto de todo nuevo buque
de guerra. La aplicación de estos métodos ha contribuido a una mejora significativa para
conseguir buques con gran capacidad para el cumplimiento de sus misiones.
IV. 58.- LÍMITES DE OPERATIVIDAD DEL BUQUE
La operatividad se puede deducir de los valores límite para los movimientos del
buque marcados en la Especificación de Contrato. Utilizando estos valores máximos
es posible evaluar las mayores alturas de olas aceptables para cada movimiento. Los
estudios se llevaron a cabo en un buque a 30 nudos y con un periodo de ola modal fijo
de 10 segundos. Se observaron los límites de respuesta para cabeceo, slamming y
aceleración vertical absoluta en la proa.
Los valores límite de operatividad utilizados en este estudio fueron 3º de amplitud
del cabeceo, 0,55 g como valor de la aceleración vertical en la sección 0 y de 20 slams
por hora. El resultado indica que las alturas de las olas a las que se alcanzaron estos
límites fueron: para valores de R entre 2 y 5 se alcanzó primero el límite de los slams,
mientras que para el resto de los valores, fue el límite de la aceleración al que se llegó
en primer lugar. Como hay buques en los que los slamming limitan la operatividad y
ya hemos dicho anteriormente que el parámetro de slamming no tiene una alta
correlación con el valor de R, se puede dar el caso en el que el mayor R no significa
una mejor operatividad. Entonces es necesario reconsiderar la influencia de los demás
movimientos.
Después de muchos estudios y pruebas de las que se obtuvieron resultados
comparativos entre el factor de mérito de Bales con la velocidad del buque y con el
periodo de la ola modal, la conclusión final es que: el factor de mérito de Bales es
verdaderamente un fiable indicador en las primeras fases del proyecto, para valorar
el comportamiento del buque en la mar.
IV. 59.- INVESTIGACIÓN PARA EVALUAR EL COMPORTAMIENTO EN LA
MAR DE FRAGATAS Y DESTRUCTORES
Con objeto de evaluar el comportamiento en la mar de buques del tipo fragata y
destructor en las primeras fases del proyecto, un equipo de investigación dirigido por
Nathan K. Bales en 1981 desarrollaron una guía para poder responder a cuestiones tales
como:
¿Puede una fragata de 3000 t mantener su velocidad en una mar de estado 6?
141
¿Podrá un destructor de entre 5000 y 6000 t ser capaz de desempeñar operaciones
de combate en el 60%, o más, de los Estados de la Mar que se espera tengan lugar
en el Atlántico Norte?
Para llevar a cabo este trabajo han explorado, en principio, las relaciones existentes
entre el tamaño del buque y su configuración con la posibilidad de que soporte
operaciones de combate, con que mantenga velocidad y rumbo y con que pueda
sobrevivir en un ambiente de mar agitada.
Basándose en otros trabajos de investigación anteriores desarrollaron unas formas
de carena con cualidades óptimas de comportamiento en la mar. A continuación, en
otra etapa de su investigación utilizaron los resultados anteriores para definir unas
nuevas formas para otro buque con cualidades anti-óptimas de comportamiento en la
mar. El diseño del casco anti-óptimo fue desarrollado por un procedimiento que se
diferenciaba del primero en que se minimizó el valor del factor de mérito R.
En la figura 54.IV y en la Tabla XXII se comparan los proyectos de las carenas del
buque óptimo y anti-óptimo. Ambas se aplicaron a buques de 4.300 t de desplazamiento.
Para cualquier otro casco con un desplazamiento arbitrario se pueden obtener sus
dimensiones lineales multiplicando las originales por el factor:
(𝚫 /4.300)1/3.
en donde Δ es el nuevo desplazamiento. Por ejemplo, para un desplazamiento de 8.000
t el casco óptimo tendrá 167 m de eslora mientras que el anti-óptimo será de 145 m de
eslora.
La investigación llevada a cabo sobre los cascos óptimo y anti-óptimo tuvo como
consecuencia una importante conclusión: el casco anti-óptimo es menos consistente
para producir respuestas de un “caso peor”, de lo que es el casco óptimo para
producir respuestas de un “caso mejor”. Por ejemplo, el casco anti-óptimo tiene
excepcionalmente bajas características de cabeceo, pero es moderado su movimiento de
arfada. Una de las consecuencias deducidas de la creación del casco anti-óptimo es que
son varios los perfiles (plano longitudinal de formas) que pueden dar lugar a buques
con algunas cualidades pobres de comportamiento en la mar, mientras que el perfil
para comportamiento en la mar superior, es único.
Mediante la evaluación del comportamiento de ambos buques, el óptimo y el anti-
óptimo para varios desplazamientos, se obtuvieron curvas envolventes de
comportamiento alcanzable, es decir, de valores del Índice de Operatividad, en función
del desplazamiento, trazadas en coordenadas (𝚫, OI). De los puntos del plano se puede evidentemente deducir el margen del comportamiento alcanzable para un desplazamiento dado, o el intervalo de desplazamientos por encima de los cuales se podría alcanzar un nivel de comportamiento dado. Además, se podrá deducir la probabilidad de obtener una solución viable por debajo de los límites para ambas coordenadas del desplazamiento y comportamiento. Por lo tanto, estas curvas envolventes confirmarían la interrelación requerida de formas/comportamiento, para la evaluación del comportamiento en la mar genérica.

142
IV. 59. 1.- PROCEDIMIENTO DE EVALUACIÓN DE CARACTERÍSTICAS
FUNCIONALES
Para la evaluación del comportamiento se investigaron buques de carenas óptimas y
anti-óptimas definidos, como se indicó más arriba, por la figura 54.IV y la Tabla XXII
partiendo de las dimensiones correspondientes al desplazamiento de 4300 t.
TABLA XXII
Comparación de parámetros para buque óptimo y anti-óptimo
Parámetros, unidades Casco óptimo Casco anti-óptimo
Eslora entre perpendiculares, m 135.8 117.8
Manga máxima en la flotación, m 14.72 14.25
Calado, m 4.28 4.84
Situación longitudinal centro de empuje Secc. 10.30 Secc. 10.58
Situación longitudinal centro de flotación Secc. 11.02 Secc. 11.28
Radio de giro del cabeceo, m 34.0 29.4
Radio de giro del balance, m 5.45 5.27
Altura metacéntrica transversal, m 1.18 1.14
Área del timón, m2 2 × 10.9 1 × 13.5
Longitud de la quilla de balance, m 36.7 29.4
Ancho de la quilla de balance, m 0.99 0.61
Coeficiente de bloque 0.50 0.53
Coeficiente prismático 0.62 0.60
Coeficiente prismático vertical 0.62 0.75
Coeficiente de la flotación 0.81 0.70
Coeficiente del área de sección máxima 0.81 0.88
Figura 54.IV
De aquí se obtuvieron mediante el factor de cambio, los parámetros
correspondientes a desplazamientos de 1.000, 2.000, 4.000, 8.000, 16.000 y 32.000
toneladas. Para cada carena a cada desplazamiento se calcularon las respuestas del
comportamiento en la mar utilizando el programa NAVY Standard Ship Motion
Program (NSSMP). Estos cálculos se llevaron a cabo a velocidades desde 0 a 30 nudos
con incrementos de 5 nudos y a rumbos relativos a la dirección de las olas, variándolos
de 15 en 15 grados. Se evaluaron las carenas correspondientes a 1.000 y 2.000 toneladas
con un espectro de ola de cresta corta representativa de los Estados de la Mar 3 a 6. Para
los buques de mayores desplazamientos, se consideraron Estados de la Mar 4 a 7.

143
Para cada combinación de casco, desplazamiento y estado de la mar, se evaluó el
comportamiento utilizando el método del diagrama polar descrito por Comstock y
Keane. Este método usa un criterio de limitación simplificada para definir una ventana o
área del plano de coordenadas entre valores de la arfada relativa (en abscisas),
velocidad del buque (en ordenadas), con la condición de que dentro de dicha área se
pueda llevar a cabo una misión determinada en una mar agitada especificada. La
relación del área de esta ventana al área de 30 nudos por 360º del plano polar de
velocidad define un Índice de Operatividad (Operability Index, OI) para la carena, la
misión y el estado de la mar que está siendo considerado.
De aquí se deduce que el OI define el porcentaje de las combinaciones de la
velocidad posible y rumbo, dentro de las que, el buque que está siendo evaluado, puede
soportar la misión que se está considerando en una mar agitada especificada. Los
Índices de Operatividad se pueden ponderar con las probabilidades de ocurrencia de los
estados de la mar para definir un Seakeeping o Ship Performance Index (SPI) para una
carena y una misión en particular, en una zona determinada del océano.
Para realizar este trabajo de investigación se seleccionaron tres grupos de valores
límite de los parámetros relacionados en la Tabla XXIII.
Los valores dados al Grupo A se fijaron con el fin de delimitar la aptitud de un
casco para soportar la totalidad de las operaciones de combate; e, implícitamente,
admitir la movilidad total. Los del Grupo B se fijaron para delimitar el apoyo al
combate con limitaciones pero con movilidad total.
Los correspondientes al Grupo C se dieron para delimitar una movilidad con
limitaciones, es decir, define el umbral de las condiciones de supervivencia en mar
agitada.
TABLA XXIII
Grupos de valores límite para definir las curvas envolventes
de comportamiento
Limitador de respuesta, Situación, Unidades
Grupos establecidos
A B C
SSA1 de cabeceo (alrededor
del CG), en grados
3,0 3,0 8,0
SSA de balance (alrededor
del CG), en grados
5,0 10,0 30,0
Embarque de agua sobre
cubierta (Secc. 0), Nº/hora
30 30 50
Incidencia de Slamming
(Secc. 3), Nº/hora
20 20 50
SSA de aceleración vertical
(Puente2), g
0,4 0,4 0,8
SSA de aceleración lateral
(Puente), g
0,2 0,2 0,4
Emersión Domo Sonar (Base
del Domo3), Nº/hora
24 - -
SSA de velocidad vertical
(Secc. 4), m/s
2,0 - -
SSA de velocidad vertical
(Secc. 17), m/s
2,0 - -
1SSA = Significant Single Amplitude 2Puente en la Sección 5, a 6,5 m sobre la cubierta de intemperie
3Base del Domo sobre la quilla en la Sección 2

144
Se llevaron a cabo cálculos idénticos a los realizados para los cascos óptimo y anti-
óptimo con Estados de la Mar 4, 5, 6 y 7 para tres buques existentes. Sus
desplazamientos eran de 3.600, 8.000 y 16.900 t. Los resultados de la evaluación del
comportamiento para estos buques se muestran como puntos sobre el plano de
coordenadas (𝚫, OI) de las curvas envolventes.
IV. 59. 2.- TRAZADO DE LAS CURVAS ENVOLVENTES
Mediante la extrapolación de los valores de los Índices de Operatividad (OI) para
los cascos óptimo y anti-óptimo de 1.000 y 2.000 t se obtuvieron las curvas para el
estado de la mar 7. Extrapolando los valores correspondientes a las carenas de mayores
desplazamientos, óptima y anti-óptima, y de los buques existentes se obtuvieron las
curvas para estado de la mar 3. Mediante la combinación entre cada uno de los Grupos
A, B y C con los Estados de la Mar, se trazaron las curvas envolventes del
comportamiento básico mediante los valores de los Índices de Operatividad para los
cascos óptimo y anti-óptimo, como una función del desplazamiento. Los Índices de
Operatividad para los tres buques existentes fueron añadidos a las curvas en sus
respectivos desplazamientos. Finalmente, los datos de los Índices de Operatividad
fueron ponderados de acuerdo con las probabilidades de ocurrencia de Estados de la
Mar al norte del Atlántico Norte durante el invierno; y estos resultados fueron trazados
como una función del desplazamiento para definir las curvas de Índices de
Comportamiento en la Mar, SPI (Seakeeping Performance Index o Ship Performance
Index) y los valores puntuales asociados para los buques existentes.
En lo que sigue, se presentan los resultados de las curvas envolventes obtenidas
por el procedimiento antes descrito y a continuación se ofrecen las interpretaciones de
estos resultados.
IV. 59. 3.- PRESENTACIÓN DE RESULTADOS
Las curvas envolventes de Índices de Operatividad obtenidas se representan en las
figuras 55.IV. La figura 56.IV presenta las curvas envolventes de los SPI. Los valores
obtenidos de las curvas envolventes del SPI para el Grupo C mostrada en la figura
56.IV, aun cuando pueden tener algún error, su importancia es mínima a causa de la
relativamente pequeña probabilidad de ocurrencia de mares de tales severidades.

145
Figura 55.IV
Las curvas del grupo A del casco óptimo y anti-óptimo prácticamente son
coincidentes con Estados de la Mar 3 y 7. Las curvas del grupo B del casco óptimo y
anti-óptimo son totalmente coincidentes para el estado de la mar 3 y casi coincidentes
para el estado de la mar 4.
Por otra parte, existen dos anomalías. Para el Grupo A, la figura 55.IV muestra un
cruce de las curvas correspondientes a los cascos óptimo y anti-óptimo para 1.000 t en
un estado de la mar 5 y para desplazamientos menores de 6.000 t en un estado de la
mar 6. Además, los índices para los buques existentes están bien delimitados para las
curvas del Grupo A en los estados de la mar 3, 4 y 7. Para las del grupo B en los
estados de la mar 3, 4 y 5. Para el Grupo C se puede considerar que están bien

146
delimitados para todos los estados de la mar. Ambas anomalías son, al parecer,
causadas por el movimiento de balance.
El casco anti-óptimo presenta características de balance superiores, en general, a las
del buque existente de 8.000 t de desplazamiento y superior a todos los demás buques
considerados (incluido el casco óptimo) para altas velocidades con la mar de popa y por
la aleta.
Los cruces de las curvas del Grupo A no se consideran un problema para las
aplicaciones a la evaluación del comportamiento en la mar ya que los Índices de
Operatividad correspondientes son pequeños. Por otra parte, el hecho de que algunos
índices para el buque existente de desplazamiento intermedio (8.000 t), estén situados
francamente debajo de la curva correspondiente al casco anti-óptimo (Grupo A, estado
de la mar 5 y Grupo B, estado de la mar 6), indican que los límites inferiores de las
curvas envolventes resultan pobremente definidas para los criterios de balance
moderado a severo. El problema no se presenta en los diagramas del Grupo C a causa
del relativamente elevado límite de balance (30º) impuesto para este caso.
IV.59. 4.- INTERPRETACIONES DE LOS RESULTADOS
De las curvas del Grupo A se desprende que, en un estado de la mar 5, un casco
que desplace 5.000 t, de diseño óptimo desde la perspectiva del comportamiento en la
mar, puede proporcionar el apoyo total a las operaciones de combate en el 94% de las
combinaciones posibles de velocidad del buque y rumbo relativo. Por otra parte, la
misma figura indica que un casco de este desplazamiento pero de diseño anti-óptimo
desde el punto de vista del comportamiento en la mar, puede apoyar operaciones de
combate solamente en el 20% de las combinaciones posibles de velocidad y rumbo.
De las curvas del Grupo B se deduce que la movilidad total y el apoyo limitado al
combate en un estado de la mar 6 se pueden mantener en el 80% de las combinaciones
de velocidad y rumbo para un casco de 3.500 t con diseño óptimo para el
comportamiento en la mar. También se deduce que para este valor del Índice de
Operatividad un casco de diseño anti-óptimo requeriría un desplazamiento como
mínimo de 10.000 t (cerca del triple del tamaño requerido para el casco óptimo).
De las curvas del Grupo C se deduce que, con estado de la mar 7, un casco de
diseño óptimo de 3.000 t mantiene la movilidad limitada impuesta, en el 72% de las
combinaciones de velocidad y rumbo. Un casco del mismo desplazamiento pero con
diseño anti-óptimo, tiene un 24% menos de opciones de velocidad y rumbo, es decir, un
OI de 0,48.
Para operaciones en el Atlántico Norte durante el invierno, la figura 56.IV indica
que, buques desde 5.500 t hasta 10.000 t pueden proporcionar apoyo total al combate
(Grupo A) entre el 70 y el 80% de las combinaciones posibles de velocidades del buque
y de rumbos relativos y en Estados de la Mar esperados. La decisión para construir un
buque con la carena del nivel más alto posible de comportamiento para el
desplazamiento más bajo (buque de 5.500 t y un SPI de 0,70) sería necesario diseñar un
casco muy similar al del casco óptimo, pero sería dudoso alcanzar los valores anteriores
ya que en la realidad durante el proceso del diseño se requieren muchas aproximaciones
sucesivas que podrían dar peor resultado final que el esperado. Por otra parte, tomar

147
como objetivo la construcción del buque con nivel de comportamiento más bajo y el
desplazamiento más alto, sería innecesariamente pesimista. Una solución viable para el
diseño realizable posiblemente se encontraría para un 75% de nivel de comportamiento
con un desplazamiento alrededor de 7.500 t.
Figura 56.IV
Si se impone un requerimiento del 90% de movilidad total al norte del Atlántico
Norte durante el invierno, para un casco de 2.000 t, la figura 56.IV indica que no existe
solución posible ya que el desplazamiento mínimo sería de 4.000 t. Si se desea
mantener la movilidad del 90% para un casco del citado desplazamiento, se hace
necesario investigar buques de tipo diferente al destructor. Los tipos de buques
alternativos, por ejemplo, pequeños vehículos de doble casco, frecuentemente tienen
buen comportamiento en la mar como propiedad de defensa. También podría interesar
la investigación de un tipo de vehículo que ofrezca un 95% de movilidad para cualquier
tamaño. Su curva sería prácticamente una recta horizontal pero su utilidad sería, no
obstante, engañosa porque de los tipos de vehículos obtenidos no se puede esperar que
tengan las mismas relaciones de tamaño-coste, armamento, o densidad de medios de
combate como un tipo destructor.

148
VI. 59. 5.- CONCLUSIONES
Las curvas envolventes dadas proporcionan una guía útil para resolver problemas
en la evaluación de la capacidad de un buque para desempeñar las misiones asignadas.
Estas envolventes indican que una fragata que está bien diseñada para el
comportamiento en la mar puede proporcionar un movimiento comparable al de un
destructor el cual ha sido pobremente diseñado desde el mismo punto de vista. Existe la
metodología necesaria para establecer las características geométricas de la fragata
superior. Si las tecnologías avanzadas aquí pudieran aplicarse por métodos innovadores
con el fin de aumentar la carga útil y el volumen utilizable para un casco de
desplazamiento dado, se podría conseguir que la fragata pudiera transportar las mismas
armas que un destructor, es decir, tendría la capacidad de combate del destructor.

149
10.- APLICACIÓN DEL ORDENADOR PARA EL
ANÁLISIS DEL COMPORTAMIENTO EN LA MAR
IV. 60.- PROGRAMAS DE ORDENADOR PARA EL ANÁLISIS DEL
COMPORTAMIENTO EN LA MAR DE BUQUES DE GUERRA
Durante el último tercio del pasado siglo XX el desarrollo de la tecnología naval
dio un gran paso adelante cuando las operaciones matemáticas requeridas para la
realización de los proyectos pasaron desde la regla de cálculo y las máquinas de calcular
a las calculadoras digitales. Inmediatamente después los programas de ordenador fueron
sustituyendo a los trabajos de panel tanto para el desarrollo de los proyectos como para
la realización de los planos de trabajo. La rápida evolución de los citados programas se
fueron imponiendo en todos los ámbitos de la Ingeniería Naval impulsando con gran
fuerza las investigaciones en busca de los resultados óptimos para la resistencia al
avance, para conseguir el propulsor de máximo rendimiento, para obtener la estabilidad
adecuada a las misiones de los buques, para el mejor comportamiento en la mar y, en
definitiva, del buque con una óptima relación eficacia-coste.
Los programas de investigación, además de los programas de ordenador, necesitan
medios materiales entre los que se cuentan buques ya construidos y una información
organizada obtenida durante la vida de los buques. Los centros para llevar a cabo estos
trabajos a gran escala, los Canales de Experiencias Hidrodinámicas, no son autónomos
y deben recibir subvenciones de los gobiernos del país correspondiente. El organismo
más interesado, en principio, es la Armada para sus buques de guerra, ya que, al ser sus
Especificaciones de Contrato las más exigentes, se requiere de la tecnología más
avanzada para comprobar que se cumplen los requerimientos exigidos para el
cumplimiento de las misiones asignadas según el tipo de buque de que se trate.
Los centros de experiencias de mayor capacidad para llevar a cabo la totalidad de
los ensayos requeridos son: el David W. Taylor Naval Ship Research and Development
Center (DTNSRDC) de la US Navy; el Netherlands Ship Model Basin (NSMB) de la
Armada holandesa, y el Canal de Experiencias Hidrodinámicas de El Pardo
(CEHIPAR) de la Armada española.
Actualmente para el tema que nos ocupa del Comportamiento del Buque en la Mar
los programas utilizados para buques de guerra, son, entre otros: el Navy Standard Ship
Motion Program (NSSMP) de la US Navy y el MOLAS II perteneciente a la empresa
NAVANTIA.
IV. 61.- ESTRUCTURA DE UN PROGRAMA PARA EL ANÁLISIS DEL
COMPORTAMIENTO DEL BUQUE EN LA MAR
Para la obtención de resultados suficientemente fiables, en el apartado IV.46 se
enunciaron las vías para el estudio del comportamiento en la mar. De los tres
Procedimientos enunciados hemos visto que el más económico es el que utiliza modelos
matemáticos, ya muy perfeccionados, para la obtención de resultados fiables. Las
pruebas con modelos a escala en Canales Hidrodinámicos se suelen reservar para la
obtención de las curvas de potencia-velocidad mediante ensayos de resistencia y
propulsión así como para proporcionar los coeficientes de las ecuaciones planteadas
para el estudio de los modelos matemáticos mediante los programas de ordenador.

150
Para llevar a cabo los cálculos y el análisis es necesario partir de la información que
se relaciona a continuación.
IV. 61. 1.- CARACTERÍSTICAS PRINCIPALES DEL BUQUE
a).- Características principales de la carena y la condición de carga para el análisis
b).- Los apéndices de la carena
c).- Puntos relevantes a verificar
Estos puntos dependen de los requerimientos establecidos, como aquellos del
interior del buque donde sea necesario conocer velocidades y aceleraciones. Entre los
puntos relevantes a considerar se encuentran: las hélices, el hospital, los puntos de toma
de helicópteros, la sección donde se produce slamming, etc.
IV. 61. 2.- CONDICIONES DE LA MAR
De las Especificaciones de Contrato se obtendrán:
a).- Velocidades del buque
b).- Estados de la mar
De la Tabla VII del apartado IV. 32 se obtienen los datos correspondientes a los
Estados de la Mar exigidos para el análisis, así como los valores de la altura de la ola
significante, el periodo modal y la velocidad del viento.
Los Estados de la Mar elegidos para el análisis dependen de las zonas donde se
prevé que operará el buque, deducidas del Atlas de la figura 28.IV. La mayoría de los
buques del tipo fragata y superiores pueden operar en cualquier mar del mundo, por lo
que para el análisis de su comportamiento en la mar se utiliza la familia espectral de
olas de Bretschneider, que es la recomendación de la ITTC (International Towing Tank
Conference), cuya distribución de densidad espectral es la dada en el apartado IV. 23.1.
IV. 61. 3.- REQUERIMIENTOS OPERATIVOS
Los exigidos por la Armada, como por ejemplo: la comprobación de cuál es el
máximo estado de la mar que el buque soporta sin daños apreciables; si el buque podrá
efectuar operaciones de vuelo con estado de la mar 5; si la velocidad máxima sostenida
la podrá alcanzar con estado de la mar 4.
IV. 61.4.- CRITERIOS
Para analizar el cumplimiento de los requerimientos definitivos dados por la
Armada, es preciso comparar los resultados de los cálculos realizados de
comportamiento en la mar, con una serie de criterios asociados a cada uno de dichos
requerimientos. Para definir tales criterios se suelen utilizar los datos de publicación de
alcance global como la STANAG (Standardization NATO Agreement) titulada Common
Procedures for Seakeeping in the ship design process. Estos criterios se utilizan para
cada uno de los requerimientos enumerados en el apartado anterior.

151
En la Tabla XXIV se resumen los criterios utilizados para analizar el
comportamiento en la mar de un buque en navegación, así como el grado de
confortabilidad a bordo, con el fin de verificar su completa operatividad tanto en
navegación normal como en condiciones extremas o de supervivencia.
IV. 61. 5.- OTROS REQUERIMIENTOS
Dependiendo del tipo de buque puede ser necesario el análisis de otros
requerimientos, como la resistencia añadida en olas, para lo que se especifica la
condición de carga y el estado de la mar y si se trata de operaciones aéreas, anfibias u
otras.
IV. 61. 6.- INFORME DEL RESULTADO DEL ANÁLISIS
Finalizado el análisis, el organismo que lo ha realizado emitirá un informe con los
resultados y las recomendaciones pertinentes. Deben constar los gráficos de los valores
obtenidos en relación con los Estados de la Mar, las velocidades del buque y la
dirección de las olas, preferentemente. Algunos de los valores requeridos de los ensayos
son:
Ángulos de balance y de cabezada.
Aceleraciones y velocidades verticales y laterales de los puestos más significativos
en Zafarrancho de Combate: Puente, cubierta de toma y despegue, el Hospital, etc.
Número de slamming por hora.
Número por hora de emersiones de las hélices.
Figura 57.IV
Tabla XXIV
Criterios
STANAG Supervivencia
Ángulo de balance (º RMS) < 4,0 < 15,0
Ángulo de cabeceo (ºRMS) < 1,5 < 4,0
Aceleración vertical (m/s2 RMS) < 2,0 <4,0
Aceleración lateral (m/s2 RMS) < 1,0 < 2,0
Embarque de agua (nº/hora) 30 50
Impactos de slamming (nº/hora) 20 50
Emergencia de las hélices (nº/hora) 90 120

152
Figura 58.IV
La figura 57.IV muestra un ejemplo del gráfico de las aceleraciones verticales sobre
la cubierta de vuelo para diferentes ángulos entre la dirección de las olas y el rumbo del
buque, según los Estados de la Mar. La figura 58.IV muestra el gráfico del número de
slamming por hora, según la velocidad del buque y los Estados de la Mar.
IV.62.- ESQUEMA DE UN PROYECTO DE INVESTIGACIÓN APLICADO A
DESTRUCTORES, FRAGATAS Y SWATH
Como ya hemos dicho en repetidas ocasiones, durante el proceso del diseño de un
buque de guerra, una de las informaciones deseadas por el equipo técnico es la de poder
evaluar cuanto antes la navegabilidad, en su sentido más amplio, del conjunto de
carenas elegidas como candidatas con el fin de seleccionar aquella que cumpliendo los
requerimientos del diseño tenga un comportamiento en la mar mejor que las demás.
Con objeto de evaluar la operatividad de un buque en mar agitada, es necesario predecir
las respuestas, para representarlas de manera significativa y cuantificar aquellas
variables que puedan afectar al comportamiento del buque cuando desempeñe
determinadas misiones.
El resultado de esta evaluación se puede expresar como el porcentaje del tiempo
que un determinado buque podría llevar a cabo una misión particular sin degradación en
su comportamiento, lo cual se había definido en el apartado IV. 51, como el Índice de
Operatividad (Operating Index, OI), cuya obtención, como hemos visto, es el resultado
de un complejo análisis.
Por eso, para predecir en las primeras fases del proyecto, la capacidad operativa en
zonas geográficas específicas, concretamente en el Atlántico Norte y Pacífico Norte, un
equipo de investigadores presidido por Kathryn K. McCreight y Ralph G. Stahl,
presentaron un método para obtener la capacidad operativa de un determinado buque.
El objetivo de este método es llegar a representar de forma razonablemente exacta que
facilite la evaluación, las tres componentes siguientes:
Las características de la movilidad del buque
Los datos del oleaje en el Atlántico Norte y en el Pacífico Norte
Los criterios que limitan la movilidad del buque para una determinada misión.
Para estos tres factores que afectan a la capacidad operativa del buque en mar
agitada han desarrollado los Índices de la Capacidad Operativa. Estos Índices tienen en
cuenta además del Porcentaje de Tiempo que el Buque Permanece Operativo (Percent

153
of Time of Operation, PTO), la limitación de altura de la ola significante (Limiting
Significant Wave Heigh, LSWH).
El análisis desarrollado por los autores, lo llevaron a cabo bajo los siguientes
supuestos y medios disponibles:
1. Modelización matemática de buques monocasco y SWATH (Small Waterplane
Area Twin Hull) considerados entre las olas y aplicación del programa de
ordenador SMP (Ship Motions Program).
2. Utilización del Modelo Espectral de Ola del Océano (Spectral Ocean Wave
Model, SOWM) desarrollada por Pierson y discutida por Bales. Esto motivó la
aplicación de programas de ordenador que favorecieron la creación de unas
tablas, las cuales incluyen la distribución de las alturas de ola significante como
una función del periodo modal espectral.
3. Asumir que el estado de la mar se puede describir como la suma de olas
regulares de acuerdo con el desarrollo de Pierson- St. Denis (apartado IV. 39.5).
Se utilizó la formulación espectral de la ola de Bretschneider. Como esta
formulación es una función de la altura de ola significante y del periodo modal
espectral, se puede utilizar junto con los datos del SOWM (Spectral Ocean Wave
Model).
4. Suponer que todas las alturas de las olas predominantes son igualmente
probables.
Utilizando estos supuestos, en primer lugar desarrollaron las funciones de
transferencia y utilizaron el pertinente espectro de ola y los límites del comportamiento
en la mar para cada misión seleccionada. Llevaron a cabo una evaluación para varias
velocidades del buque y estimaron el porcentaje de tiempo que un buque podría operar
en el espectro de ola seleccionado. Aplicando un peso a cada uno de los espectros para
reflejar la probabilidad de ocurrencia, determinaron un Índice de Operatividad (OI)
total.
(A) (B)
Figura 59.IV
El SOWM (Spectral Ocean Wave Model, SOWM) es un elemento principal para el
análisis de la capacidad para comportamiento en la mar (Seakeeping performance),

154
presentado en este trabajo. Los datos de la ola SWOM se utilizaron en 57 puntos del
Atlántico Norte y en 21 del Pacífico Norte. Se generaron datos de la ola SWOM en cada
punto para representar el ambiente en el océano con 6 horas de intervalo durante diez
años. En la figura 59.IV (A) se representa la probabilidad de ocurrencia del espectro de
la ola en función de la altura de la ola significante durante el invierno y durante el año.
En la figura 59.IV (B) se da la distribución de la altura de la ola significante en tres
puntos del Atlántico Norte durante el invierno. Estos puntos tienen aproximadamente la
misma longitud geográfica pero variando unos 10 grados la latitud entre ellos. A medida
que aumenta la latitud se produce un notable incremento de la probabilidad de
ocurrencia de picos de ola significante más altos.
Posteriormente determinaron curvas de valores constantes del Porcentaje de
Tiempo de Operación (PTO) para una misión determinada. En la figura 60.IV se
muestran ejemplos de dichas curvas correspondientes a los tipos de buques objeto de la
investigación: destructor, SWATH y fragata, situados en el Invierno del Atlántico
Norte. Se observan notables diferencias tanto entre los tipos de buques representados
así como respecto a la situación geográfica. Todos los diseños presentan una mayor
operatividad a medida que se desplazan hacia el sur. La operatividad de la Fragata y del
destructor se degrada cuando aumenta la latitud. Sin embargo, la operatividad del
SWATH permanece alta en todas las zonas.

155
Figura 60.IV
Compararon la capacidad operativa bajo el criterio de movilidad, de seis carenas
con desplazamientos que van desde aproximadamente 3.000 hasta 9.000 toneladas
métricas. Consideraron ambas configuraciones, monocasco y SWATH (Small
Waterplane Area Twin Hull). Realizaron la comparación de la capacidad operativa
como una función de la altura de la ola significante, como una función del
desplazamiento, y como una función de la velocidad, mediante las estadísticas anuales
de olas para el invierno y en el Atlántico Norte, en general. También obtuvieron algunos
resultados para el Pacífico Norte. Para las formas de las carenas analizadas presentaron
las curvas de la capacidad operativa en el Atlántico Norte. Para diferentes condiciones
operativas expresaron tabulados los límites de las alturas de la ola significante. El efecto
de las variaciones sistemáticas en los criterios de comportamiento lo presentaron como
una función de la velocidad.
Los trabajos de investigación expuestos, muestran la dificultad de emprender un
proyecto que pueda dar lugar a unas conclusiones fiables que permitan aplicarlas a
futuros prototipos de buques de guerra. Por su elevado presupuesto y por la necesidad
de disponer de medios físicos, bases de datos y equipo muy cualificado de personal
técnico, estas investigaciones solamente es posible llevarlas a cabo en naciones de muy
elevado nivel económico y tecnológico.
En la misma línea anterior, mediante otro trabajo de investigación realizado por el
equipo de técnicos, a cuyo frente se encontraban David A. Walden y Peter Grundmann,
lograron diseñar carenas con dos propiedades fundamentales en mares agitadas: formas
de reducidos movimientos y de escasos embarques de agua sobre cubierta.
Para ello dispusieron de un grupo de fragatas y destructores existentes que
utilizaron en la investigación para obtener factores de mérito con los que valorar el
comportamiento en la mar y para la estimación del francobordo de un nuevo buque en
las primeras etapas del proyecto.
En el trabajo se describen los resultados de un análisis de correlación. En primer
lugar, se utiliza para generar una ecuación de regresión con el fin de predecir el
comportamiento en la mar del nuevo buque. A continuación, la matriz de correlación

156
desarrollada durante el análisis de regresión la utilizaron para proporcionar una guía
para el diseño de un buque con movimientos reducidos.
Además han llevado a cabo un estudio del factor de mérito relativo de los buques
como una función de las distintas cantidades de movimiento relacionadas, incluidos en
la medida del mérito. Han realizado los cálculos para determinar si el factor de mérito
relativo de los buques es una función de la velocidad del buque o del periodo modal de
la ola. En el trabajo se discuten las medidas de mérito, que incluyen los valores
máximos permitidos además de uno de los objetivos principales, es decir, la reducción
de movimientos.
Se aplicó a un gran número de cascos el método desarrollado por Bales para la
determinación del francobordo requerido. Los resultados muestran la influencia, tanto
del tamaño del buque (eslora y desplazamiento) como del comportamiento en la mar,
sobre el francobordo requerido. Utilizando estos resultados desarrollaron un método
sencillo para predecir el francobordo necesario. Finalmente realizaron la comparación
entre el francobordo calculado utilizando el procedimiento de Bales y el obtenido por el
presente procedimiento.
157
REFERENCIAS (Por orden alfabético)
[1] Aláez Zazurca, José A. Comportamiento del buque en la mar. Ministerio de
Defensa. CEHIPAR Marzo 1995.
[2] Álvarez-Campana, José Mª González. Fundamentos. Comportamiento del Buque
en la Mar. 2010.
[3] Álvarez-Campana, José Mª González. Aplicación. Comportamiento del Buque en
la Mar. Noviembre 2011.
[4] Andrew, R. N., Lloyd, A.R.J.M. Full Scale Comparative Measurements of the
Behaviour of two Frigates in Severe Head Seas. Trina 123. 1981.
[5] Armada Española. Informe de Comportamiento en la Mar de un Buque de
Proyección Estratégica. Abril 2003.
[6] Ayza, J., J. López, J. Quevedo. Modelización de la Dinámica de un Buque.
Questió. V. 4 nº 3. Septiembre 1980.
[7] Bales, Nathan K. & Daniel S. Cieslowski. A Guide to Generic Seakeeping
Performance Assessment. NEJ, April 1981.
[8] Casanova, Enrique. El Buque de Guerra, Editorial de FEIN, 2009
[9] Comstock, Edward N. & Robert G. Keane, Jr. Seakeeping by Design. NEJ, April
1980.
[10] Comstock, Edward N., Susan N. Bales & Dana M. Gentile. Seakeeping
Performance Comparison of Air Capable Ships. NEJ, April 1982.
[11] Dodd, R. K. et alia. Solitons and NonlinearWave Equations. 1982.
[12] Ferrer Mur, Santiago. Olas Oceánicas: Cálculo de su Energía. 2012.
[13] Galmés Giralt, José L.. Diseño Innovador de Diques Verticales con Geometrías
Cilíndricas.UPC. ETSICCP. Abril 2005.
[14] Galmés Giralt, José L.. Teoría de Airy. Solución Lineal de la Ecuación de
Ondas. 2005.
[15] Lloyd, A.R.J.M.. SEAKEEPING: Ship Behaviour inRough Weather. 1998.
[16] Losada, Miguel A., Luis Tejedor Martinez, et alia. Métodos Espectrales de
Previsión de Oleaje. Estudio Comparativo. Revista de Obras Públicas. Mayo
1977.
[17] Massel. Capítulo V. Análisis de la aproximación de loa Modelos Espectrales.
1997.
[18] Marón Loureiro, A. y L. Palau Lechuga. El Laboratorio de Dinámica del Buque
del Canal de Experiencias Hidrodinámicas de El Pardo (CEHIPAR) Marzo
1993.
[19] Marón Loureiro Adolfo. Optimización de Generadores de Olas para Ensayos de
Comportamiento en la mar. Tesis Doctoral. ETSINO Madrid. Abril 2010
[20] McCreight, Kathryn K. & Ralph G. Stahl. Recent Advances in the Seakeeping
Assesment of Ships. NEJ, May 1985.
[21] Michel,Walter H.. Sea Spectra Simplified. 1968.
[22] M. O. S. et alia. Oscilaciones de Corto Periodo: Oleaje. Descripción
estadística. Universidad de Granada. 2012-2013.
[23] Nieto, José Carlos. Estudio del Oleaje. Su Influencia en el Conocimiento del
Clima y en las Actividades Humanas Relacionadas con la Mar. Universidad de
Alcalá.2011.
[24] Ochi, M. K.. Extreme Behaviour of Ships in Rough Seas.Slamming and Shipping
of Green Water. T.SNAME 72. 1964.

158
[25] Ochi, M. K. & L. Motter. Prediction of Slamming Characteristics and Hull
Response for Ship Design. T.SNAME. 1973.
[26] O’Dogherty, Pascual. Comportamiento en la Mar de Buques de Guerra.
Criterios de Estabilidad. Ministerio de Defensa. CEHIPAR. 1978.
[27] O’Dogherty, Pascual. Comportamiento en la Mar de Buques Pesqueros.
Ministerio de Defensa. CEHIPAR. 1974.
[28] Palomino, Mª del Carmen y José L. Almazán. Descripción, Medida y Análisis
del Oleaje. ETSICCP. Universidad Politécnica de Madrid. 2000.
[29] Rosales Sierra, V. Caracterización del Oleaje. UPC.2013
[30] Rusu, Liliana, Maria Bernardino. Estimation of the Operability Index of a
Containership Operating in the Black Sea. The Annals of University Dunarea
de Jos of Galati, Rumania, Lisbon. 2009.
[31] St. Dennis-M., Pierson W. J. On the Motions of Ships in Confused Seas.
T.SNAME. Vol. 61. 1953.
[32] Vidal Bosch, J. R.. Teoría de Olas. Comportamiento del Buque en la Mar.
2008.
[33] Walden, David A. & Peter Grundmann. Methods for Designing Hull Forms with
Reduced Motions and Dry Decks. May 1985.

159
ÍNDICE ALFABÉTICO
Aguas
Intermedias, 26, 33
Muy profundas, 15, 26
Poco profundas, 16, 26, 27, 30
Someras, 25, 33
Airy, 16, 23, 26, 27, 30, 33, 34, 50
Altura significante, 17, 60, 73, 74
Espectro
De la aceleración, 45
De la arfada, 42
Atlántico Norte, 65, 75, 80,125, 141, 144, 146,
152, 155
Bales, 113, 153, 156 Factor de Mérito de, 119, 120, 140, 155
Fórmula de, 122
Banda ancha, 55, 58
Banda estrecha, 42, 50, 51, 52, 55,109
Bernoulli, 9, 22
BMT, 80,81
Boussinesq, 31
Bretschneider, 36, 73, 74, 77, 129, 135, 150,
153
Bretschneider-Mitsuyasu, 63,77
Broaching, 87
Buque de Acción Marítima (BAM), 125
Capacidad operativa, 154
Cartas de vientos, 118
Cartwright, 53, 55
CEHIPAR, 149
Coriolis, 21
Canal de Experiencias Hidrodinámicas, 23, 87,
98
Condición de contorno
En superficie libre, 22, 25
Por fondo, 22, 24
Lateral, 23
Correlación, teoría de, 46, 47
Coste del ciclo de vida, 115, 129
Cruce por cero, 55, 80, 126
Comportamiento en la mar, 85, 94, 113, 122, 129
Análisis del, 135, 149
Capacidad para el, 88, 153
Características óptimas para, 120
Con modelos a escala, 23
Cualidades anti-óptimas del, 141
Cualidades óptimas de, 141
Cualidades pobres del, 141
De buques de doble casco, 147
De buques de guerra, 77, 115, 133
De fragatas y destructores, 140, 148 Diseño óptimo para el, 146
Envolventes operativas del, 138
Especificaciones para el, 130
Evaluación del, 94, 129, 146
Índice del, 133,144
Influencia sobre el francobordo del, 156
Límites del, 153
Preliminar, 78
Primeras fases del proyecto, 118
Superior, 141
Técnicas de identificación, 115
Valoración del, 155
Comstock, 143
Corbeta, 125
Curvas envolventes, 141, 143, 146, 148
Destructor, 119,140, 147, 154, 156
Diagrama de esparcimiento, 123, 125
Dirac, 51
Distribución de frecuencia, 123, 125
Conjunta condicional, 124
DTNSRDC, 149
Embarque de agua, 87, 94, 109, 111, 131, 134,
136, 143, 151
Ecuación
De Bernoulli, 22 De continuidad, 22
De Laplace, 22,24
Eficacia Operativa, 119, 122, 124, 127

160
Ergódico, 47, 49
Escala Beaufort, 78, 79
Escala Douglas, 78, 80
Especificaciones de Contrato, 86
Del buque de guerra, 115, 116, 118,
123, 127, 149
Espectro
Ancho de banda, 50, 55, 57, 108
Direccional, 78
Parcialmente desarrollado, 75
Totalmente desarrollado, 74, 75
Estado de la mar, 62, 79, 105, 110, 113, 116,
143
Estocástico, 47, 49, 51, 54
Euler, 8
Ecuación de, 21
Evaluación del comportamiento en la mar, 94,
104, 141,144, 146
Factor de Carga, 116
Factor de corrección CF, 59
Fetch, 45, 60, 63, 65, 74, 75
Fourier,
Series de, 23
Transformada de, 10, 51
Fragata, 111, 117, 119, 124, 127, 150, 155
Frecuencia de ocurrencia, 83
Frecuencia de encuentro, 88, 90, 92, 102, 104,
106, 109
Froude, 85, 101
Función
De transferencia, 102, 105, 131, 153
De autocorrelación temporal, 51
Función muestral, 50, 55
Gaussiano, 10, 46
Golfo de Méjico, 74
Grundmann, 155
GWS, 81, 83
Hasselmann, 65
Índice
De Operatividad, 119, 122, 128, 141,
146,152
De comportamiento en la mar, 133
Ingeniero Naval, 35, 36,135
ISSC, 65, 73, 77
ITTC, 9, 64, 150
Jacobs, 9
Jonswap, 64, 66, 75, 77, 129
Jorge Juan, 7
Kinsman, 14, 51
Krylov, 8, 85, 101
Korteweg y de Vries, 32
Korvin-Kroukovsky, 9
Longitud de onda aparente, 60
Longuet-Higgins, 9, 51, 54, 63
LSWH, 153
Mar
Confusa, 18, 36
Parcialmente desarrollada, 73
Totalmente desarrollada, 40, 45, 67, 73
Mareo, 7
Media muestral temporal, 49
Mitsuyasu, 63
Movimientos de cabeceo, largada, arfada,
balance, deriva y guiñada, 93
Navantia, 114, 149
Neumann, 64, 67, 70, 72,75
Newman, 9
Newton, 8, 97
NSMB, 149
Número de onda, 15, 25, 85

161
Océano Pacífico, 74
Ola
Bidimensional, 21
Cnoidal, 30, 32, 33
Condición de rotura, 12, 21, 28
De Airy, 23
Pendiente de la, 16
Regular, 8, 32, 45, 103, 107 Sinusoidal, 26, 43
Teoría de la, 78
Ola significante,
Altura, 16, 19, 36, 41, 62, 64, 67, 74
Periodo, 78, 126
Olas irregulares, 56, 108, 110, 123
Olas reales, 12
Altura de, 65 Difusión de las, 68
Espectro de, 67
Oleaje, 16, 18, 35
Agrupamiento del, 35
Análisis espectral del, 36
Como proceso ergódico, estacionario,
estadístico, estocástico, 47
De baja frecuencia, 59
De viento, 13
Decadencia del, 62 Direcciones del, 83
Duración del, 36
Edad del, 36
En el Atlántico Norte, 67, 75
Espectros de energía del, 62, 63, 66
Estimación visual del, 78
Estudio del, 46
Generación del, 36
Medición del, 19
Parcialmente desarrollado, 73, 76
Periodo de pico del, 19
Periodo del, 60 Previsión del, 63
Propagación del, 22
Propagación hidrodinámica del, 35
Punto de vista científico del, 34
Punto de vista práctico del, 34
Registrador del, 19
Regular y periódico, 23
SEA, 13
SWELL, 13
Totalmente desarrollado, 63, 65, 73,
76,79 Unidad de longitud del, 52
Onda solitaria, 28, 31, 33,
Patrullera, 125
Periodo medio, 18, 48, 56, 65
Periodo medio de los picos, 15
Periodo modal, 64, 79, 123, 126, 139, 150, 153,
156
Periodo óptimo, 70, 76
Periodo significante, 65, 74
Phillips, teoría de, 67
Pierson, 69, 153
Pierson-Marks, 51
Pierson-Moskowitz, 63, 68, 71, 74, 77, 129
Pierson-St. Denis, 98, 104, 153
Potencial de velocidad, 26, 86
Principio de superposición, 110
Programas
MOLAS II, 114, 149
NSSMP, 114, 142, 149
PTO, 153
Rayleigh, 31, 42
Curva de, 63
Distribución de, 59, 109
Función de, 52
Ola de, 55
RAO, 103, 105, 108, 110, 137
Reconocimiento de los estados de la mar, 88
Resistencia añadida
En olas irregulares, 109, 151
Roll-Fisher, 63, 69, 71
Russell, 32
Sclavounos, 9
Scott, 76
Schrödinger, ecuación de, 34
Series temporales, 18
Silvester, 76
Slamming, 88, 95, 110, 120, 133, 141, 152

162
Solitón, 32
SOWM, 153
STANAG, 150
Stokes, 27, 30
Teoría de, 33, 34
Supervivencia, 99, 116, 143, 151
Sverdrup y Munk, 36, 73
Teoría de Rebanadas, (Strip Theory), 86, 99,
101, 104, 119, 131
Teoría espectral de olas, 77
SWATH, 140, 152, 154
Tsunami, 13, 30, 34
Ursell, parámetro de, 34
Valor medio cuadrático temporal, 49
Varianza, 131
Walden, 113, 120, 155
Weinblum, 8
Whipping, 87, 111
Wiener-Khintchine, 51






























