Embed Size (px)
Citation preview

Reprinted from Sound and Vibration, November 1975, pages 24-35
Effective Measurements for StructuralDynamics TestingPART IKenneth A. Ramsey, Hewlett-Packard Company, Santa Clara, California
Digital Fourier analyzers have opened a new era instructural dynamics testing. The ability of these systemsto quickly and accurately measure a set of structuralfrequency response functions and then operate on themto extract modal parameters is having a significantimpact on the product design and development cycle.Part I of this article is intended to introduce the structuraldynamic model and the representation of modalparameters in the Laplace domain. The concludingsection explains the theory for measuring structuraltransfer functions with a digital analyzer. Part II will bedirected at presenting various practical techniques formeasuring these functions with sinesoidal, transient andrandom excitation. New advances in random excitationwill be presented and digital techniques for separatingclosely coupled modes via increased frequencyresolution will be introduced.
Structural Dynamics and Modal Analysis Understanding the dynamic behavior of structures andstructural components is becoming an increasinglyimportant part of the design process for any mechanicalsystem. Economic and environmental considerationshave advanced to the state where over-design and lessthan optimum performance and reliability are not readilytolerated. Customers are demanding products that costless, last longer, are less expensive to operate, while atthe same time they must carry more pay-load, runquieter, vibrate less, and fail less frequently. Thesedemands for improved product performance havecaused many industries to turn to advanced structuraldynamics testing technology. The use of experimental structural dynamics as anintegral part of the product development cycle has variedwidely in different industries. Aerospace programs wereamong the first to apply these techniques for predictingthe dynamic performance of fight vehicles. This type ofeffort was essential because of the weight, safety, andperformance constraints inherent in aerospace vehicles.Recently, increased consumer demand for fuel economy,reliability, and superior vehicle ride and handling qualitieshave been instrumental in making structural dynamicstesting an integral part of the automotive design cycle.An excellent example was reported in the cover storyarticle on the new Cadillac Seville from AutomotiveIndustries, April 15, 1975.
"The most radical use of computer technology which ’willrevolutionize the industry’ . . . is dynamic structural analysis, orFourier analysis as it is commonly known. It was thistechnique, in conjunction with others, that enabled Cadillac to’save a mountain of time and money,’ and pare down the
number of prototypes necessary. It also did away with muchtrial and error on the solution of noise and vibration problems.’’
In order to understand the dynamic behavior of avibrating structure, measurements of the dynamicproperties of the structure and its components areessential. Even though the dynamic properties of certaincomponents can be determined with finite computertechniques, experimental verification of these results arestill necessary in most cases. One area of structural dynamics testing is referred toas modal analysis. Simply stated, modal analysis is theprocess of characterizing the dynamic properties of anelastic structure by identifying its modes of vibration.That is, each mode has a specific natural frequency anddamping factor which can be identified from practicallyany point on the structure. In addition, it has acharacteristic "mode shape" which defines the modespatially over the entire structure.
Once the dynamic properties of an elastic structurehave been characterized, the behavior of the structure inits operating environment can be predicted and,therefore, controlled and optimized.
Figure 1—The HP 5451 B Fourier Analyzer is typical of
modern digital analyzers that can be used for acquisition andprocessing of structural dynamics data.
In general, modal analysis is valuable for threereasons:

1) Modal analysis allows the verification and adjustingof the mathematical models of the structure. Theequations of motion are based on an idealizedmodel and are used to predict and simulatedynamic performance of the structure. They alsoallow the designer to examine the effects of changesin the mass, stiffness, and damping properties of thestructure in greater detail. For anything except thesimplest structures, modeling is a formidable task.Experimental measurements on the actual hardwareresult in a physical check of the accuracy of themathematical model. If the model predicts the samebehavior that is actually measured, it is reasonableto extend the use of the model for simulation, thusreducing the expense of building hardware andtesting each different configuration. This type ofmodeling plays a key role in the design and testing ofaerospace vehicles and automobiles, to name onlytwo.
2) Modal analysis is also used to locate structural weakpoints. It provides added insight into the mosteffective product design for avoiding failure. Thisoften eliminates the tedious trial and errorprocedures that arise from trying to applyinappropriate static analysis techniques to dynamicproblems.
3) Modal analysis provides information that is essentialin eliminating unwanted noise or vibration. Byunderstanding how a structure deforms at each of itsresonant frequencies, judgments can be made as towhat the source of the disturbance is, what itspropagation path is, and how it is radiated into theenvironment.
In recent years, the advent of high performance, lowcost minicomputers, and computing techniques such asthe fast Fourier transform have given birth to powerfulnew "instruments" known as digital Fourier analyzers(see Figure 1). The ability of these machines to quicklyand accurately provide the frequency spectrum of atime-domain signal has opened a new era in structuraldynamics testing. It is now relatively simple to obtain fast,accurate, and complete measurements of the dynamicbehavior of mechanical structures, via transfer functionmeasurements and modal analysis.
Techniques have been developed which now allow themodes of vibration of an elastic structure to be identifiedfrom measured transfer function data,1,2. Once a set oftransfer (frequency response) functions relating points ofinterest on the structure have been measured andstored, they may be operated on to obtain the modalparameters; i.e., the natural frequency, damping factor,and characteristic mode shape for the predominantmodes of vibration of the structure. Most importantly, themodal responses of many modes can be measuredsimultaneously and complex mode shapes can bedirectly identified, permitting one to avoid attempting toisolate the response of one mode at a time, i.e., the socalled "normal mode’’ testing concept. The purpose of this article is to address the problem ofmaking effective structural transfer functionmeasurements for modal analysis. First, the concept of atransfer function will be explored. Simple examples of
one and two degree of freedom models will be used toexplain the representation of a mode in the Laplacedomain. This representation is the key to understandingthe basis for extracting modal parameters frommeasured data. Next, the digital computation of thetransfer function will be shown. In Part II, the advantagesand disadvantages of various excitation types and acomparison of results will illustrate the importance ofchoosing the proper type of excitation. In addition, thesolution for the problem of inadequate frequencyresolution, non-linearities and distortion will bepresented.
The Structural Dynamics ModelThe use of digital Fourier analyzers for identifying themodal properties of elastic structures is based onaccurately measuring structural transfer (frequencyresponse) functions. This measured data contains all ofthe information necessary for obtaining the modal(Laplace) parameters which completely define thestructures’ modes of vibration. Simple one and twodegree of freedom lumped models are effective tools forintroducing the concepts of a transfer function, thes-plane representation of a mode, and the correspondingmodal parameters. The idealized single degree of freedom model of asimple vibrating system is shown in Figure 2. It consistsof a spring, a damper, and a single mass which isconstrained to move along one axis only. If the systembehaves linearly and the mass is subjected to anyarbitrary time varying force, a corresponding time varyingmotion, which can be described by a linear second orderordinary differential equation, will result. As this motiontakes place, forces are generated by the spring anddamper as shown in Figure 2.
Figure 2—Idealized single degree of freedom model.

Figure 3—A two degree of freedom model.
The equation of motion of the mass m is found bywriting Newton’s second law for the mass
( maext =∑F ), where ma is a real inertial force,
)()()()( txmtxctkxtf &&& =−− (1)
where )(tx& and )(tx&& denote the first and second timederivatives of the displacement x(t). Rewriting equation(1) results in the more familiar form:
)(tfkxxcxm =++ &&& (2)
where: f(t) = applied force x = resultant displacement x& = resultant velocity x&& = resultant acceleration
and m, c, and k are the mass, damping constant, andspring constant, respectively. Equation (2) merelybalances the inertia force ( xm && ), the damping force ( xc& ),and the spring force ( kx ), against the externally appliedforce, )(tf . The multiple degree of freedom case follows the samegeneral procedure. Again, applying Newton’s secondlaw, one may write the equations of motion as:
022221)21(1)21(11 =−−++++ xkxcxkkxccxm &&&& (3)
and
)(12122)32(2)32(22 tFxkxcxkkxccxm =−−++++ &&&&
(4)
It is often more convenient to write equations (3) and (4)in matrix form:
=
+−−+
+
+−−+
+
)(
0
)()(
)()(
)()(
)()(
0
0
2
1
322
221
2
1
322
221
2
1
2
1
tFx
x
kkk
kkk
x
x
ccc
ccc
x
x
m
m
&
&
&&
&&
(5)
or equivalently, for the general n-degree of freedomsystem,
[ ] [ ] [ ] FxKxCxM =++ &&& (6)
Where, [ ]M = mass matrix, (n x n),
[ ]C = damping matrix, (n x n),
[ ]K = stiffness matrix, (n x n),
and the previously defined force, displacement, velocity,and acceleration terms are now n-dimensional vectors. The mass, stiffness, and damping matrices contain allof the necessary mass, stiffness, and dampingcoefficients such that the equations of motion yield thecorrect time response when arbitrary input forces areapplied. The time-domain behavior of a complex dynamicsystem represented by equation (6) is very usefulinformation. However, in a great many cases, frequencydomain information turns out to be even more valuable.For example, natural frequency is an importantcharacteristic of a mechanical system, and this can bemore clearly identified by a frequency domainrepresentation of the data. The choice of domain isclearly a function of what information is desired. One of the most important concepts used in digitalsignal processing is the ability to transform data betweenthe time and frequency domains via the Fast FourierTransform (FFT) and the Inverse FFT. The relationshipsbetween the time, frequency, and Laplace domains arewell defined and greatly facilitate the process ofimplementing modal analysis on a digital Fourieranalyzer. Remember that the Fourier and Laplacetransforms are the mathematical tools that allow data tobe transformed from one independent variable to another(time, frequency or the Laplace s-variable). The discreteFourier transform is a mathematical tool which is easilyimplemented in a digital processor for transformingtime-domain data to its equivalent frequency domainform, and vice versa. It is important to note that noinformation about a signal is either gained or lost as it istransformed from one domain to another. The transfer (or characteristic) function is a goodexample of the versatility of presenting the sameinformation in three different domains. In the timedomain, it is the unit impulse response, in the frequencydomain the frequency response function and in theLaplace or s-domain, it is the transfer function. Mostimportantly, all are transforms of each other.

Because we are concerned with the identification ofmodal parameters from transfer function data, it isconvenient to return to the single degree of freedomsystem and write equation (2) in its equivalent transferfunction form. The Laplace Transform. Recall that a function of timemay be transformed into a function of the complexvariable s by:
∫∞
−=0
)()( dtetfsF st (7)
The Laplace transform of the equation of motion of asingle degree of freedom system, as given in equation(2), is
[ ] [ ] )()()0()()0()0()(2 sFskXxssXcxsxsXsm =+−+−− &
(8)where,
)0(x is the initial displacement of the mass m and
)0(x& is the initial velocity.
This transformed equation can be rewritten bycombining the initial conditions with the forcing function,to form a new )(sF :
[ ] )()(2 sFsXkcsms =++ (9)
It should now be clear that we have transformed theoriginal ordinary differential equation into an algebraicequation where s is a complex variable known as theLaplace operator. It is also said that the problem istransformed from the time (real) domain into the s(complex) domain, referring to the fact that time isalways a real variable, whereas the equivalentinformation in the s-domain is described by complexfunctions. One reason for the transformation is that themathematics are much easier in the s-domain. Inaddition, it is generally easier to visualize the parametersand behavior of damped linear sustems in the s-domain. Solving for X(s) from equation (9), we find
kcsms
sFsX
++=
2
)()( (10)
The denominator polynomial is called the characteristicequation, since the roots of this equation determine thecharacter of the time response. The roots of thischaracteristic equation are also called the poles orsingularities of the system. The roots of the numeratorpolynomial are called the zeros of the system. Poles andzeros are critical frequencies. At the poles the functionx(s) becomes infinite; while at the zeros, the functionbecomes zero. A transfer function of a dynamic systemis defined as the ratio of the output of the system to theinput in the s-domain. It is, by definition, a function of thecomplex variable s. If a system has m inputs and nresultant outputs, then the system has m x n transfer
functions. The transfer function which relates thedisplacement to the force is referred to as thecompliance transfer function and is expressedmathematically as,
)(
)()(
sF
sXsH = (11)
From equations (10) and (11), the compliance transferfunction is,
kcsmssH
++=
2
1)( (12)
Note that since s is complex, the transfer function has areal and an imaginary part. The Fourier transform isobtained by merely substituting ωj for s. This specialcase of the transfer Unction is called the frequencyresponse function. In other words, the Fourier transformis merely the Laplace transform evaluated along the ωj ,or frequency axis, of the complex Laplace plane.
The analytical form of the frequency response functionis therefore found by letting s = ωj :
kjcmjH
++−=
ωωω
2
1)( (13)
By making the following substitutions in equation (13),
km
c
C
c
m
k
cn
2,2 === ζω
cC = critical damping coefficient
we can write the classical form of the frequencyresponse function so,
−
+
==
2
2
21
1)(
)(
)(
nn
jk
jHjF
jX
ωω
ωωζ
ωωω
(14)
However, for our purposes, we will continue to work inthe s-domain. The above generalized transfer function,equation (12), was developed in terms of compliance.From an experimental viewpoint, other very useful formsof the transfer function are often used and, in general,contain the same information. Table I summarizes thesedifferent forms.
Table I – Different forms of the transfer function formechanical systems.
Force
ntDisplaceme=
DynamicCompliance ntDisplaceme
Force= Dynamic
Stiffness

Force
Velocity = Mobility
Velocity
Force = Mechanical
Impedance
Force
onAccelerati = Inertance
onAccelerati
Force=
DynamicMass
The s-Plane. Since s is a complex variable, we canrepresent all complex values of s by points in a plane.Such a plane is referred to as the s-plane. Any complexvalue of s may be located by plotting its real componenton one axis and its imaginary component on the other.Now, the magnitude of any function, such as thecompliance transfer function, )(sH , can be plotted as asurface above the plane of Figure 4. This requires athree-dimensional figure which can be difficult to sketch,but greatly facilitates the understanding of the transferfunction. By definition, ωσ js += where σ is thedamping coefficient and ω is the angular frequency. The inertance transfer function of a simple two degreeof freedom system is plotted as a function of the svariable in Figure 5. The transfer function evaluatedalong the frequency axis ( )ωjs = is the Fouriertransform or the system frequency response function. Itis shown by the heavy line. If we were to measure thefrequency response function for this system viaexperimental measurements using the Fourier transform,we would obtain a complex-valued function of frequency.It must be represented by its real (coincident) part and itsimaginary (quadrature) part; or equivalently, by itsmagnitude and phase. These forms are shown in Figure6.
In general, complex mechanical systems contain manymodes of vibration or "degrees of freedom.’’ Modernmodal analysis techniques can be used to extract themodal parameters of each mode without requiring eachmode to be isolated or excited by itself. Modes of Vibration The equations of motion of an ndegree of freedom system can be written as
)()()( sFsXsB = (15)
Where, )(sF = Laplace transform of the applied force vector
)(sX = Laplace transform of the resulting output vector
KCsMssB ++= 2)( s = Laplace operator
Figure 4—The s plane, ωσ js +=
Figure 5—The magnitude of the Laplace transform of a twodegree of freedom system with poles at 113 js ±−= and
66 js ±−= .
)(sB is referred to as the system matrix. The transfer
matrix, )(sH is defined as the inverse of the systemmatrix, hence it satisfies the equation.
)()()( sFsHsX = (16)
Each element of the transfer matrix is a transfer function. From the general form of the transfer functiondescribed in equation (16), )(sH can always be writtenin partial fraction form as:
∑= −
=n
k k
k
ps
asH
2
1
)( (17)
where, n = number of degrees of freedom
kp = thk root of the equation obtained by setting
the determinant of the matrix )(sB equalto zero
ka = residue matrix for the kit root.

Figure 6—Frequency response functions of a two degree offreedom system.
Figure 7—A multi-degree of freedom system can be ideallyrepresented as a series of coupled single degree of freedom
systems.
As mentioned earlier, the roots kp are referred to as
poles of the transfer function. These poles are complexnumbers and always occur in complex conjugate pairs,except when the system is critically or supercriticallydamped. In the latter cases, the poles are real-valuedand lie along the real (or damping) axis in the s-plane. Each complex conjugate pair of poles corresponds to amode of vibration of the structure. They are complexnumbers written as
kkkkkk jpjp ωσωσ −−=+−= ∗ (18)
Where * denotes the conjugate, kσ is the modal
damping coefficient, and kω is the natural frequency.
These parameters are shown on the s-plane in Figure 8.An alternate set of coordinates for defining the polelocations are the resonant frequency, given by
22kkk ωσ +=Ω (19)
and the damping factor, or percent of critical damping,given by:
k
kk Ω
=σζ (20)
The transfer matrix completely defines the dynamics ofthe system. In addition to the poles of the system (whichdefine the natural frequency and damping), the residuesfrom any row or column of )(sH define the system
Figure 8—An s-plane representation for a single degree offreedom system.

mode shapes for the various natural frequencies. Ingeneral, a pole location, kP , will be the same for all
transfer functions in the system because a mode ofvibration is a global property of an elastic structure. Thevalues of the residues, however, depend on theparticular transfer function being measured. The valuesof the residues determine the amplitude of theresonance in each transfer function and, hence, themode shape for the particular resonance. From complexvariable theory, we know that if we can measure thefrequency response function (via the Fourier transform)then we know the exact form of the system (its transferfunction) in the s-plane, and hence we can find the fourimportant properties of any mode. Namely, its naturalfrequency, damping, and magnitude and phase of itsresidue or amplitude. While this is a somewhat trivial task for a single degreeof freedom system, it becomes increasingly difficult forcomplex systems with many closely coupled modes.However, considerable effort has been spent in recentyears to develop sophisticated algorithms for curve-fittingto experimentally measured frequency responsefunctions.1,2 This allows the modal properties of eachmeasured mode to be extracted in the presence of othermodes. From a testing standpoint, these new techniques offerimportant advantages. Writing equation (16) in matrixform gives:
=
)(
)(
)()(
)()(
)(
)(
2
1
2221
1211
2
1
sF
sF
shsh
shsh
sX
sX (21)
If only one mode is associated with each pole, then it canbe shown that the modal parameters can be identifiedfrom any row or column of the transfer function matrix[H], except those corresponding to components knownas node points. In other words, it is impossible to excite amode by forcing it at one of its node points (a pointwhere no response is present). Therefore, only one rowor column need be measured. To measure one column on the transfer matrix, anexciter would be attached to the structure (point #1 tomeasure column #1; point #2 to measure column #2)and responses would be measured at points #1 and #2.Then the transfer function would be formed bycomputing,
)(
)()(
ωωω
jF
jXjH = (22)
To measure a row of the transfer matrix, the structurewould be excited at point #1 and the response measuredat point #1. Next, the structure would be excited at point#2 and the response again measured at point #1. Thislatter case corresponds to having a stationary responsetransducer at point #1, and using an instrumentedhammer for applying impulsive forcing functions. Both ofthese methods are referred to as single point excitationtechniques. Complex Mode Shapes. Before leaving the structuraldynamic model, it is important to introduce the idea of a
complex mode shape. Without placing restrictions ondamping beyond the fact that the damping matrix besymmetric and real valued, modal vectors can in generalbe complex valued. When the mode vectors are realvalued, they are the equivalent of the mode shape. In thecase of complex modal vectors, the interpretation isslightly different. Recall that the transfer matrix for a single mode can bewritten as;
∗
∗
−+
−=
k
k
k
kk ps
a
ps
asH )( (23)
where
ka = (n x n) complex residue matrix.
kp = pole location of mode k.
A single component of )(sH is thus written as
)(2)(2)( ∗
∗
−−
−=
k
k
k
k
psj
r
psj
rsH (24)
where
j
rk
2 = complex residue of mode k.
Now, the inverse Laplace transform of the transferfunction of equation (24) is the impulse response ofmode k; that is, if only mode k was excited by a unitimpulse, its time domain response would be
)sin()(kk
tkkk tertx αωσ −= −
(25)
Figure 9—Impulse response for a single degree of freedomsystem and for the two degree of freedom system shown in
Figure 5.

where
kr = magnitude of the residue
kα = phase angle of the residue
A phase shift in the impulse response is introduced bythe phase angle kα of the complex residue. For
0=kα , the mode is said to be ’’normal’’ or real valued.
It is this phase delay in the impulse response that isrepresented by the complex mode shape.Experimentally, a real or normal mode is characterizedby the fact that all points on the structure reach theirmaximum or minimum deflection at the same time. Inother words, all points are either in phase or 180° out ofphase. With a complex mode, phases other than 0° and180° are possible. Thus, nodal lines will be stationary fornormal modes and nonstationary or "traveling" forcomplex modes. The impulse response for a singledegree of freedom system and for the two degree offreedom system represented in Figure 5 are shown inFigure 9. The digital Fourier Analyzer has proven to be an idealtool for measuring structural frequency responsefunctions quickly and accurately. Since it provides abroadband frequency spectrum very quickly (e.g., = 100ms for 512 spectral lines when implemented inmicrocode), it can be used for obtaining broadbandresponse spectrums from a structure which is excited bya broadband input signal. Furthermore, if the input andresponse time signals are measured simultaneously,Fourier transformed, and the transform of the responseis divided by the transform of the input, a transferfunction between the input and response points on thestructure is measured. Because the Fourier Analyzercontains a digital processor, it possesses a high degreeof flexibility in being able to post-process measured datain many ways. It has been shown1,2 that the modes of vibration of anelastic structure can be identified from transfer functionmeasurements by the application of digital parameteridentification techniques. Hewlett-Packard hasimplemented these techniques on the HP 5451B FourierAnalyzer. The system uses a single point excitationtechnique. This approach, when coupled with abroadband excitation allows all modes in the bandwidthof the input energy to be excited simultaneously. Themodal frequencies, damping coefficients, and residues(eigenvectors) are then extracted from the measuredbroadband transfer functions via an analytical curve-fitting algorithm. This method thus permits an accuratedefinition of modal parameters without exciting eachmode individually. Part II of this article will address theproblem of making transfer function measurements. The data shown in Figure 10 was obtained by using theHewlett-Packard HP 5451B Fourier Analyzer to measurethe required set of frequency response functions from asimple rectangular plate and identify the predominantmodes of vibration. Figure 10A shows a typical frequencyresponse function obtained from using an impulsetesting technique on a flat aluminum
Figure 10—Typical frequency response function of thevibration of a simple rectangular plate (A) and animated
isometric displays of the predominant vibration modes (B-F).

plate. Input force was measured with a load cell and theoutput response was measured with an accelerometer.After 55 such functions were measured and stored, themodal parameters were identified via a curve-fittingalgorithm. In addition, the Fourier Analyzer provided ananimated isometric display of each mode, the results ofwhich are shown in Figures 10B – 10F.
The Transfer and Coherence Functions The measurement of structural transfer functions usingdigital Fourier analyzers has many important advantagesfor the testing laboratory. However, it is imperative thatone have a firm understanding of the measurementprocess in order to make effective measurements. Forinstance, digital techniques require that allmeasurements be discrete and of finite duration. Thus, inorder to implement the Fourier transform digitally, it mustbe changed to a finite form known as the DiscreteFourier Transform (DFT). This means that all continuoustime waveforms which must be transformed must besampled (measured) at discrete intervals of time,uniformly separated by an interval t∆ . It also means thatonly a finite number of samples N can be taken andstored. The record length T is then
tNT ∆= (26)
The effect of implementing the DFT in a digital memoryis that it no longer contains magnitude and phaseinformation at all frequencies as would be the ease forthe continuous Fourier transform. Rather, it describesthe spectrum of the waveform at discrete frequenciesand with finite resolution up to some maximumfrequency, maxF , which according to Shannon's sampling
theorem, obeys
tF
∆=
2
1max (27)
As a direct consequence of equation (27), we can writethe physical law which defines the maximum frequencyresolution obtainable for a sampled record of length, T.
Tf
1=∆ (28)
When dealing with real valued-time functions, there willbe N points in the record. However, to completelydescribe a given frequency, two values are required; themagnitude and phase or, equivalently, the real part andthe imaginary part. Consequently, N points in the timedomain can yield 2N complex quantities in thefrequency domain. With these important relationships inmind, we can return to the problem of measuring transferfunctions.
The general case for a system transfer functionmeasurement is shown below
where: )(tx = Time-domain input to the system
)(ty = Time-domain response of the system
)( fS x = Linear Fourier spectrum of )(tx
)( fS y = Linear Fourier spectrum of )(ty
)( fH = System transfer function (frequencydomain)
)(th = System impulse response
The linear Fourier spectrum is a complex valued functionthat results from the Fourier transform of a timewaveform. Thus, xS and yS have a real (in phase or
coincident) and imaginary (quadrature) parts.In general, the result of a linear system on any time
domain input signal, )(tx , may be determined from the
convolution of the system impulse response, )(th , with
the input signal, )(tx , to give the output, )(ty .
τττ dtxhty )()()( −= ∫∞
∞−
(29)
This operation may be difficult to visualize. However, avery simple relationship can be obtained by applying theFourier transform to the convolution integral. The outputspectrum, yS , is the product of the input spectrum, xS ,
and the system transfer function, )( fH .
)()()( fHfSfS xy ⋅= (30)
In other words, the transfer function of the system isdefined as:
x
y
S
SH ==
INPUT
OUTPUT (31)
The simplest implementation of a measurement schemebased on this technique is the use of a sine wave for
)( fx . However, in many cases, this signal hasdisadvantages compared to other more general types ofsignals. The most general method is to measure theinput and output time waveforms in whatever form theymay be, and to calculate H using xS , yS and the
Fourier transform.For the general measurement case, the input )(tx is
not sinusoidal and will often be chosen to be randomnoise, especially since it has several advantages whenused as a stimulus for measuring structural transferfunctions. However, it is not generally useful to measurethe linear spectrum of this type of signal because it

cannot be smoothed by averaging; therefore we typicallyresort to the power spectrum.
The power spectrum of the system input is defined andcomputed as:
∗=
=
xx
xx
SS
txG )(input theof spectrumPower (32)
where
∗xS = Complex conjugate of xS .
and
∗=
=
yy
yy
SS
tyG )(output theof spectrumPower (33)
where
∗yS = Complex conjugate of yS .
The cross power spectrum between the input and theoutput is denoted by yxG and defined as,
∗= xyyx SSG (34)
Returning to equation (31), we can multiply the
numerator and denominator by ∗xS . This shows that the
transfer function can be expressed as the ratio of thecross power spectrum to the input auto power spectrum.
xx
yx
x
x
x
y
G
G
S
S
S
SH =•= ∗
∗
(35)
There are three important reasons for defining thesystem transfer function in this way. First, this techniquemeasures magnitude and phase since the cross powerspectrum contains phase information. Second, thisformulation is not limited to sinusoids, but may in fact beused for any arbitrary waveform that is Fouriertransformable (as most physically realizable timefunctions are). Finally, averaging can be applied to themeasurement. This alone is an important considerationbecause of the large variance in the transfer functionestimate when only one measurement is used. So, ingeneral,
xx
yx
G
GfH =)( (36)
where yxG denotes the ensemble average of the cross
power spectrum and xxG represents the ensemble
average of the input auto power spectrum.As an added note, the impulse response )(th of a
linear system is merely the inverse transform of thesystem transfer function,
= −
xx
yx
G
GFth 1)( (37)
Reducing Measurement NoiseThe importance of averaging becomes much more
evident if the transfer function model shown above isexpanded to depict the "real-world" measurementsituation. One of the major characteristics of any modaltesting system is that extraneous noise from a variety ofsources is always measured along with the desiredexcitation and response signals. This case for transferfunction measurements is shown below.
where:)( fS x = Lineal Fourier spectrum of the measured
input signal)( fSd = Linear Fourier spectrum of the desired
response measurement)( fS y = Linear Fourier spectrum of the measured
response)( fN = Linear Fourier spectrum of the noise
)( fH = System transfer functionSince we are interested in identifying modal parametersfrom measured transfer functions, the variance on theparameter estimates is reduced in proportion to theamount of noise reduction in the measurements. Thedigital Fourier analyzer has two inherent advantages overother types of analyzers in reduction of measurementnoise; namely, ensemble averaging, and a secondtechnique commonly referred to as post data smoothingwhich may be applied after the measurements are made.
Without repeating the mathematics for the generalmodel of a transfer function measurement in thepresence of noise, it is easy to show that the transferfunction is more accurately written as:
xx
nx
xx
yx
G
G
G
GH −= (38)
where the frequency dependence notation has beendropped and,
yxG = Ensemble average of the cross power spectrum
between input and output
xxG = Ensemble average of the input power spectrum
nxG = Ensemble average of the cross power spectrum
between the noise and the input
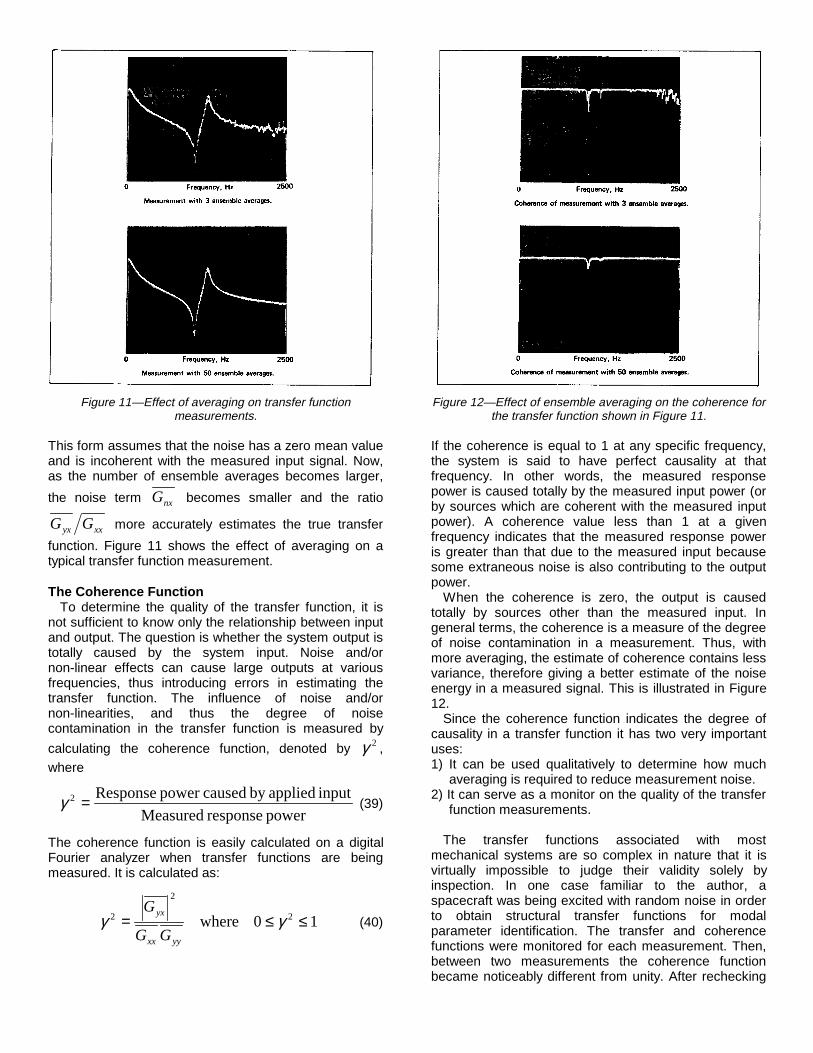
Figure 11—Effect of averaging on transfer functionmeasurements.
This form assumes that the noise has a zero mean valueand is incoherent with the measured input signal. Now,as the number of ensemble averages becomes larger,
the noise term nxG becomes smaller and the ratio
xxyx GG more accurately estimates the true transfer
function. Figure 11 shows the effect of averaging on atypical transfer function measurement.
The Coherence FunctionTo determine the quality of the transfer function, it is
not sufficient to know only the relationship between inputand output. The question is whether the system output istotally caused by the system input. Noise and/ornon-linear effects can cause large outputs at variousfrequencies, thus introducing errors in estimating thetransfer function. The influence of noise and/ornon-linearities, and thus the degree of noisecontamination in the transfer function is measured by
calculating the coherence function, denoted by 2γ ,where
power response Measured
input appliedby causedpower Response2 =γ (39)
The coherence function is easily calculated on a digitalFourier analyzer when transfer functions are beingmeasured. It is calculated as:
10where 2
2
2 ≤≤= γγyyxx
yx
GG
G (40)
Figure 12—Effect of ensemble averaging on the coherence forthe transfer function shown in Figure 11.
If the coherence is equal to 1 at any specific frequency,the system is said to have perfect causality at thatfrequency. In other words, the measured responsepower is caused totally by the measured input power (orby sources which are coherent with the measured inputpower). A coherence value less than 1 at a givenfrequency indicates that the measured response poweris greater than that due to the measured input becausesome extraneous noise is also contributing to the outputpower.
When the coherence is zero, the output is causedtotally by sources other than the measured input. Ingeneral terms, the coherence is a measure of the degreeof noise contamination in a measurement. Thus, withmore averaging, the estimate of coherence contains lessvariance, therefore giving a better estimate of the noiseenergy in a measured signal. This is illustrated in Figure12.
Since the coherence function indicates the degree ofcausality in a transfer function it has two very importantuses:1) It can be used qualitatively to determine how much
averaging is required to reduce measurement noise.2) It can serve as a monitor on the quality of the transfer
function measurements.
The transfer functions associated with mostmechanical systems are so complex in nature that it isvirtually impossible to judge their validity solely byinspection. In one case familiar to the author, aspacecraft was being excited with random noise in orderto obtain structural transfer functions for modalparameter identification. The transfer and coherencefunctions were monitored for each measurement. Then,between two measurements the coherence functionbecame noticeably different from unity. After rechecking

all instrumentation, it was discovered that a randomvibration test being conducted in a separate part of thesame building was providing incoherent excitation viastructural (building) coupling, even through a seismicisolation mass. This extraneous source was increasingthe variance on the measurement but would probably nothave been discovered without use of the coherencefunction.
SummaryIn Part I, we have introduced the structural dynamic
model for elastic structures and the concept of a mode ofvibration in the Laplace domain. This means ofrepresenting modes of vibration is very useful becausewe are interested in identifying the modal parametersfrom measured frequency response functions. Lastly, theprocedure for calculating transfer and coherencefunctions in a digital Fourier analyzer were discussed.
In Part II, we will discuss various techniques foraccurately measuring structural transfer functions.Because modal parameter identification algorithms workon actual measured data, we are interested in makingthe best measurements possible, thus increasing theaccuracy of our parameter estimates. Techniques forexciting structures with various forms of excitation will bediscussed. Also, we will discuss methods for arbitrarilyincreasing the available frequency resolution via bandselectable Fourier analysis—the so-called zoomtransform.
References1. Richardson, M., and Potter, R., "Identification of the
Modal Properties of an Elastic Structure fromMeasured Transfer Function Data," 20th l.S.A,Albuquerque, N.M., May 1974.
2. Potter, R., and Richardson, M., "Mass, Stiffness andDamping Matrices from Measured ModalParameters," I.S.A. Conference and Exhibit, NewYork City, October 1974.
3. Roth, P. R., "Effective Measurements Using DigitalSignal Analysis," I.E.E.E. Spectrum, pp 62-70, April1971.
4. Fourier Analyzer Training Manual, Application Note140-0 Hewlett-Packard Company.
5. Potter, R., "A General Theory of Modal Analysis forLinear Systems," Hewlett-Packard Company, 1975(to be published).
6. Richardson, M., "Modal Analysis Using Digital TestSystems," Seminar on Understanding Digital Controland Analysis in Vibration Test Systems, Shock andVibration Information Center publication, May 1975.

02-5952-7055 PRINTED IN US.A.
Effective Measurements for StructuralDynamics TestingPart IIKenneth A. Ramsey, Hewlett-Packard Company, Santa Clara, California
Digital Fourier analyzers have opened a new era instructural dynamics testing. The ability of these systemsto measure a set of structural transfer functions quicklyand accurately and then operate on them to extractmodal parameters is having a significant impact on theproduct design and development cycle. In order to usethese powerful new tools effectively, it is necessary tohave a basic understanding of the concepts which areemployed. In Part I of this article, the structural dynamicsmodel was introduced and used for presenting the basicmathematics relative to modal analysis and therepresentation of modal parameters in the Laplacedomain. Part I concluded with a section describing thebasic theoretical concepts relative to measuring transferand coherence functions with a digital Fourier analyzer.Part II presents an introductory discussion of severaltechniques for measuring structural transfer functionswith a Fourier analyzer. Broadband testing techniquesare stressed and digital techniques for identifying closelycoupled modes via increased frequency resolution areintroduced.
Certainly one of the most important areas of structuraldynamics testing is the use of modern experimentaltechniques for modal analysis. The development ofanalytical and experimental methods for identifyingmodal parameters with digital Fourier analyzers has hada dramatic impact on product design in a number ofindustries. The application of these new concepts hasbeen instrumental in helping engineers designmechanical structures which carry more payload, vibrateless, run quieter, fail less frequently, and generallybehave according to design when operated in a dynamicenvironment.
Making effective measurements in structural dynamicstesting can be a challenging task for the engineer who isnew to the area of digital signal analysis. These powerfulnew signal analysis systems represent a significantdeparture from traditional analog instrumentation interms of theory and usage. By their very nature, digitaltechniques require that all measurements be discreteand of finite duration, as opposed to continuous durationin the analog domain. However, the fact that digitalFourier analyzers utilize a digital processor enables themto offer capabilities to the testing laboratory that wereunheard of only a few years ago.
Modal analysis, an important part of the overallstructural dynamics problem, is one area that hasbenefited tremendously from the advent of digital Fourieranalysis. The intent of this article is to present some ofthe important topics relative to understanding andmaking effective measurements for use in modal
analysis. The engineer using these techniques needs tohave a basic understanding of the theory on which theidentification of modal parameters is based, in order tomake a measurement which contains the necessaryinformation for parameter extraction.
Part I of this article introduced the structural dynamicsmodel and how it is represented in the Laplace ors-domain. The Laplace formulation was used, because itprovides a convenient model to present the definition ofmodal parameters and the mathematics for describing amode of vibration.
In this part, we will diverge from the mathematics andpresent some practical means for measuring structuraltransfer functions for the purpose of modal parameteridentification. Unfortunately, the scope of this article doesnot permit a thorough explanation of many factors whichare important to the measurement process, such assampling, aliasing, and leakage.1 Instead, we willconcentrate more on different types of excitation and theimportance of adequate frequency resolution.
Identification of Modal Parameters:a Short Review
In Part I we derived the time, frequency and Laplace ors-plane representation of a single-degree-of-freedomsystem, which has only one mode of vibration.
The time domain representation is a statement ofNewton’s second law
)()()()( tftkxtxctxm =++ &&& (1)
where)(tf = applied force
)(tx = resultant displacement
)(tx& = resultant velocity
)(tx&& = resultant accelerationm = massc = damping constantk = spring constant
This equation of motion gives the correct time domainresponse of a vibrating system consisting of a singlemass, spring and damper, when an arbitrary input forceis applied
The transfer function of the single-degree-of-freedomsystem is derived in terms of its s-plane representationby introducing the Laplace transform. The transferfunction is defined as the ratio of the Laplace transformof the output of the system to the Laplace transform of

Figure I—A mechanical system can be described in: (A) the time domain, (B) the frequency domain or (C) the Laplace domain.
the input. The compliance transfer function was writtenas
kcsmssF
sXsH
++==
2
1
)(
)()( (2)
Finally, the Frequency domain form is found byapplying the fact that the Fourier transform is merely theLaplace transform evaluated along the ωj or frequencyaxis ot the complex Laplace plane. This special case ofthe transfer function is called the frequency responsefunction and is written as,
−
+
==
2
2
21
1
)(
)()(
nn
jkjF
jXjH
ωω
ωωζ
ωωω (3)
where:
m
kn =2ω
km
c
c
c
c 2==ζ
cC = critical damping
nω = natural frequency
Thus, as shown in Figure 1, the motion of a mechanicalsystem can be completely described as a function oftime, frequency, or the Laplace variable, s. Mostimportantly, all are valid ways of characterizing a systemand the choice generally dictated by the type ofinformation that is desired.
Because the behavior of mechanical structures is moreeasily characterized in the frequency domain, especiallyin terms of modes of vibration, we will devote ourattention to their frequency domain description. A mode
of vibration (the thk mode) is completely described by
the four Laplace parameters: kω , the natural frequency;
kσ , the modal damping co-efficient; and the complex
residue, which is expressed as two terms, magnitudeand phase. The residues define the mode shapes for thesystem. The Fourier transform is the tool that allows usto transform time domain signals to the Frequencydomain and thus observe the Laplace domain along thefrequency axis. It is possible to show that the transferfunction over the entire s-plane is completely determinedby its values along the ωj axis, so the frequencyresponse function contains all of the necessaryinformation to identify modal parameters.
Figure 2—The Hewlett-Packard 5451B FourierAnalyzer istypical of modern digital signal analyzers which are being
increasingly used for the acquisition and processing of modalanalysis data.

Digital Fourier analyzers, such as the one shown inFigure 2, have proven to be ideal tools for measuringstructural frequency response functions (transferfunctions) quickly and accurately. Coupling this with thefact that modes of vibration can be identified frommeasured frequency respouse functions by digitalparameter identification techniques gives the testinglaboratory an accurate and cost-effective means forquickly characterizing a structure’s dynamic behavior byidentifying its modes of vibrations.2
The remainder of this article will attempt to introducesome of the techniques which are available for makingeffective frequency response measurements with digitalFourier analyzers.
Measuring Structural Frequency ResponseFunctions
The general scheme for measuring frequencyresponse functions with a Fourier analyzer consists ofmeasuring simultaneously an input and response signalin the time domain, Fourier transforming the signals, andthen forming the system transfer function by dividing thetransformed response by the transformed input. Thisdigital process enjoys many benefits over traditionalanalog techniques in terms of speed, accuracy andpost-processing capability.3 One of the most importantfeatures of Fourier analyzers is their ability to formaccurate transfer functions with a variety of excitationmethods. This is in contrast to traditional analogtechniques which utilize sinusoidal excitation. Othertypes of excitation can provide faster measurements anda more accurate simulation of the type of excitationwhich the structure may actually experience in service.The only requirement on excitation functions with adigital Fourier analyzer is that they contain energy at thefrequencies to be measured. The following sections will discuss three popularmethods for exciting a structure for the purpose ofmeasuring transfer functions; they are, random,transient, and sinusoidal excitation. To begin with, we willrestrict our discussion to baseband measurements; i.e.,measurements made from dc (zero frequency) to some
maxF (maximum requency). The procedures for using
these broadband stimuli (except transient) are all verysimilar. They are typically used to drive a shaker which inturn excites the mechanical structure under test. Thegeneral process is illustrated in Figure 3.
Random Excitation TechniquesIn this section, three types of broadband random
excitation which can be used for making frequencyresponse measurements are discussed. Each onepossesses a distinct set of characteristics which shouldbe understood in order to use them effectively. The threetypes are: (1) pure random, (2) pseudo random, and (3)periodic random.
Typically, pure random signals are generated by anexternal signal generator, whereas pseudo random andperiodic random are generated by the analyzer’sprocessor and output to the structure via a
Figure 3—The general test setup for rnaking frequencyresponse measurements with a digital Fourier analyzer and an
electro-dynamic shaker.
Figure 4—Comparison of pure random, pseudo random, andperiodic random noise. Pure random is never periodic. Pseudorandom is exactly periodic every T seconds. Periodic randomis a combination of both; i.e., a pseudo random signal that is
changed for every ensemble average.
digital-to-analog coverter, as shown in Figure 3. Figure 4illustrates each type of random signal.
Pure RandomPure random excitation typically has a Gaussian
distribution and is characterized by the fact that it is in noway periodic, i.e., does not repeat. Typically, the outputof an independent signal generator may he passedthrough a bandpass filter in order to concentrate energyin the band of interest. Generally, the signal spectrum willbe flat except for the filter roll-off and, hence, only theoverall level is easily controlled.
One disadvantage of this approach is that, althoughthe shaker is being driven with a flat input spectrum, thestructure is being excited by a force with a differentspectrum due to the impedance mismatch between thestructure and shaker head. This means that the forcespectrum is not easily controlled and the structure maynot be forced in the optimum manner. Since it is difficultto shape the spectrum because it is not generallycontrolled by the computer, some form of closed-loopforce control system would ideally be used. Fortunately,

in most cases, the problem is not important enough towarrant this effort.
A more serious drawback of pure random excitation isthat the measured input and response signals are notperiodic in the measurement time window of theanalyzer. A key assumption of digital Fourier analysis isthat the time waveforms be exactly periodic in theobservation window. If this condition is not met, thecorresponding frequency spectrum will contain so-called"leakage" due to the nature of the discrete Fouriertransform; that is, energy from the non-periodic parts ofthe signal will "leak" into the periodic parts of thespectrum, thus giving a less accurate result.1
In digital signal analyzers, non-periodic time domaindata is typically multiplied by a weighting function suchas a Hanning window to help reduce the leakage causedby non-periodic data and a standard rectangular window.
When a non-periodic time waveform is multiplied bythis window, the values of the signal in the measurementwindow more closely satisfy the requirements of aperiodic signal. The result is that leakage in the spectrumof a signal which has been multiplied by a Hanningwindow is greatly reduced.
However, multiplication of two time waveforms, i.e., thenon-periodic signal and the Hanning window, isequivalent to the convolution of their respective Fouriertransforms (recall that multiplication in one domain isexactly equivalent to convolution in the other domain).Hence, although multiplication of a non-periodic signal bya Hanning window reduces leakage, the spectrum of thesignal is still distorted due to the convolution with theFourier transform of the Hanning window. Figure 5illustrates these points for a simple sinewave.
With a pure random signal, each sampled record ofdata T seconds long is different from the proceeding andfollowing records. (Figure 4). This gives rise to the singlemost important advantage of using a pure random signalfor transfer function measurement. Successive recordsof frequency domain data can be ensemble averagedtogether to remove non-linear effects, noise, anddistortion from the measurement. As more and moreaverages are taken, all of these components of astructure’s motion will average toward an expected valueof zero in the frequency domain data. Thus, a muchbetter measure of the linear least squares estimate ofthe response of the structure can be obtained.3
This is especially important because digital parameterestimation schemes are all based on linear models andthe premise that the structure behaves in a linearmanner. Measurements that contain distortion will bemore difficult to handle if the modal parameteridentification techniques used are based upon a linearmodel of the structure’s motion.
Pseudo-RandomIn order to avoid the leakage effects of a non-periodic
signal, a waveform known as pseudo random iscommonly used. This type of excitation is easy toimplement with a digital Fourier analyzer and its
Figure 5—(A) A sinewave is continuous throughout time and isrepresented by a single line in the frequency domain; (B) whenobserved with a standard rectangular window, it is still a single
spectral line, if it is exactly periodic in the window; (C) if it isnot periodic in the measurement window, leakage occurs and
energy "leaks" into adjacent frequency channels; (D) theHanning window is one of many types of windows which areuseful for reducing the effects of leakage; and (E) multiplying
the time domain data by the Hanning window causes it tomore closely meet the requirement of a periodic signal, thus
reducing the leakage effect.
digital-to-analog (DAC) converter. The most commonlyused pseudo random signal is referred to as"zero-variance random noise." It has uniform spectraldensity and random phase. The signal is generated inthe computer and repeatedly output to the shakerthrough the DAC every T seconds (Figure 4). The lengthof the pseudo random record is thus exactly the same asthe analyzer’s measurement record length (T seconds),and is thus exactly periodic in the measurement window.
Because the signal generation process is controlled bythe analyzer’s computer, any signal which can bedescribed digitally can be output through the DAC. Thedesired output signal is generated by specifying theamplitude spectrum in the frequency domain; the phasespectrum is normally random. The spectrum is thenFourier transformed to the time domain and outputthrough the DAC. Therefore, it is relatively easy to alterthe stimulus spectrum to account for the exciter systemcharacteristics.
In general, besides providing leakage-freemesurements, a technique using pseudo random noisecan often provide the fastest means for making astatistically accurate transfer function measurement

when using a random stimulus. This proves to be thecase when the measurement is relatively free ofextraneous noise and the system behaves linearly,because the same signal is output repeatedly and largenumbers of averages offer no significant advantagesother than the reduction of extraneous noise.
The most serious disadvantage of this type of signal isthat because it always repeats with every measurementrecord taken, non-linearities, distortion, and periodicitiesdue to rattling or loose components on the structurecannot be removed from the measurement by ensembleaveraging, since they are excited equally every time thepseudo random record is output.
Periodic RandomPeriodic random waveforms combine the best features
of pure random and pseudo random, but without thedisadvantages; that is, it satisfies the conditions for aperiodic signal, yet changes with time so that it excitesthe structure in a truly random manner.
The process begins by outputting a pseudo randomsignal from the DAC to the exciter. After the transientpart of the excitation has died out and the structure isvibrating in its steady-state condition, a measurement istaken; i.e., input, output, and cross power spectrums areformed. Then instead of continuing to output the samesignal again, a different uncorrelated pseudo randomsignal is synthesized and output (refer again to Figure 4).This new signal excites the structure in a newsteady-state manner and another measurement is made.
When the power spectrums of these and many otherrecords are averaged together, non-linearities anddistortion components are removed from the transferfunction estimate. Thus, the ability to use a periodicrandom signal eliminates leakage problems andensemble averaging is now useful for removing distortionbecause the structure is subjected to a differentexcitation before each measurement.
The only drawback to this approach is that it is not asfast as pseudo random or pure random, since thetransient part of the structure’s response must beallowed to die out before a new ensemble average canbe made. The time required to obtain a comparablenumber of averages may be anywhere from 2 to 3 timesas long. Still, in many practical cases where a basebandmeasurement is appropriate, periodic random providesthe best solution, in spite of the increased measurementtime.
Sinusoidal TestingUntil the advent of the Fourier analyzer, the measure
ment of transfer functions was accomplished almostexcIusively through the use of swept-sine testing. Withthis method, a controlled sinusoidal force is input to thestructure, and the ratio of output response to the inputforce versus frequency is plotted. Although sine testingwas necessitated by analog instrumentation, it iscertainly not limited to the analog domain. Sinusoidallymeasured transfer functions can be digitized andprocessed with the Fourier analyzer or can be measureddirectly, as we will explain here.
In general, swept sinusoidal excitation with analoginstrumentation has several disadvantages whichseverely limit its effectiveness:1) Using analog techniques, the low frequency range is
often limited to several Hertz.2) The data acquisition time can be long.3) The dynamic range of the analog instrumentation
limits the dynamic range of the transfer functionmeasurements.
4) Accuracy is often difficult to maintain.5) Non-linearities and distortion are not easily coped
with.However, swept-sine testing does offer someadvantages over other testing forms:1) Large amounts of energy can be input to the
structure at each particular frequency.2) The excitation force can be controlled accurately.Being able to excite a structure with large amounts ofenergy provides at least two benefits. First, it results inrelatively high signal-to-noise ratios which aid indetermining transfer function accuracy and, secondly, itallows the study of structural non-linearities at anyspecific frequency, provided the sweep frequency can bemanually controlled.
Sine testing can become very slow, depending uponthe frequency range of interest and the sweep raterequired to adequately define modal resonances.Averaging is accomplished in the time domain and is afunction of the sweep rate.
A sinusoidal stimulus can be utilized in conjunction witha digital Fourier Analyzer in many different ways.However, the fastest and most popular method utilizes atype of signal referred to as a "chirp." A chirp is alogarithmically swept sinewave that is periodic in theanalyzer’s measurement window, T. The swept sine isgenerated in the computer and output through the DACevery T seconds. Figure 10G shows a chirp signal. Theimportant advantage of this type of signal is that it issinusoidal and has a good peak-to-rms ratio. This is animportant consideration in obtaining the maximumaccuracy and dynamic range from the signal conditioningelectronics which comprise part of the test setup. Sincethe signal is periodic, leakage is not a problem. However,the chirp suffers the same disadvantage as a pseudorandom stimulus; that is, its inability to average outnon-linear effects and distortion.
Any number of alternate schemes for using sinusoidalexcitation can be implemented on a Fourier analyzer.However, they will not be discussed here because theyoffer few, if any, advantages over the chirp and, in fact,generally serve to make the measurement process moretedious and lengthy.
Transient TestingAs mentioned earlier, the transfer function of a system
can be determined using virtually any physicallyrealizable input, the only criteria being that some inputsignal energy exists at all frequencies of interest.However, before the advent of mini-computer-basedFourier analyzers, it was not practical to determine theFourier transform of experimentally generated input andresponse signals unless they were purely sinusoidal.

These digital analyzers, by virtue of the fast Fouriertransform, have allowed transient testing techniques tobecome widely used. There are two basic types oftransient tests: (1) Impact, and (2) Step Relaxation.
Impact TestingA very fast method of performing transient tests is to
use a hand-held hammer with a load cell mounted to it toimpact the structure. The load cell measures the inputforce and an accelerometer mounted on the structuremeasures the response. The process of measuring a setof transfer functions by mounting a stationary responsetransducer (accelerometer) and moving the input forcearound is equivalent to attaching a mechanical exciter tothe structure and moving the response transducer frompoint to point. In the former case, we are measuring arow of the transfer matrix whereas in the latter we aremeasuring a column.2
In general, impact testing enjoys several importantadvantages:1) No elaborate fixturing is required to hold the
structure under test.2) No electro-mechanical exciters are required.3) The method is extremely fast—often as much as 100
times as fast as an analog swept-sine test.However, this method also has drawbacks. The mostserious is that the power spectrum of the input force isnot as easily controlled as it is when a mechanicalshaker is used. This causes non-linearities to be excitedand can result in some variablity between successivemeasurements. This is a direct consequence of theshape and amplitude of the input force signal.
The impact force can be altered by using a softer orharder hammer head. This, in turn, alters thecorresponding power spectrum. In general, the wider thewidth of the force impulse, the lower the frequency rangeof excitation. Therefore, impulse testing is a matter oftrade-offs. A hammer with a hard head can be used toexcite higher frequency modes, whereas a softer headcan be used to concentrate more energy at lowerfrequencies. These two cases are illustrated in Figures 6and 7.
Since the total energy supplied by an impulse isdistributed over a broad frequency range, the actualexcitation energy density is often quite small. Thispresents a problem when testing large, heavily dampedstructures, because the transfer function estimate willsuffer due to the poor signal-to-noise ratio of themeasurement. Ensemble averaging, which can be usedwith this method, will greatly help the problem of poorsignal-to-noise ratios.
Another major problem is that of frequency resolution.Adequate frequency resolution is an absolute necessityin making good structural transfer functionmeasurements. The fundamental nature of a transientresponse signal places a practical limitation on theresolution obtainable. Inorder to obtain good frequencyresolution for quantifying very lightly damped
Figure 6—An instrumented hammer wih a hard head is usedfor exciting higher frequency modes but with reduced energy
density.
Figure 7—An instrumented hammer with a soft head can beused for concentrating more energy at lower frequencies,
however, higher frequencies are not excited.
resonances, a large number of digital data points mustbe used to represent the signal. This is another way ofsaying that the Fourier transform size must be largesince
Tf
1
size ansformFourier tr
interest offrequency maximum
21
==∆
Thus, as the response signal decays to zero, itssignal-to-noise ratio becomes smaller and smaller. If ithas decayed to a small value before a data record iscompletely filled the Fourier transform will be operatingmostly on noise therefore causing uncertainties in thetransfer function measurement. Obviously, the problembecomes more acute as higher frequency resolutions areneeded and as more heavily damped structures aretested. Figure 8 illustrates this case for a simplesingle-degree-of-freedom system. In essence frequencyresolution and damping form the practical limitations forimpulse testing with baseband (dc to maxF ) Fourier
analysis.Since a transient signal may or may not decay to zero
within the measurement window, windowing can be aserious problem in many cases, especially when thedamping is light and the structure tends to vibrate for along time. In these instances, the standard rectangularwindow is unsatisfactory because of the severe leakage.Digital Fourier analyzers allow the user to employ avariety of different windows which will alleviate theproblem. Typically, a Hanning window would beunsuitable because it destroys data at the first of therecord--the most important part of a transient signal.The exponential window can be used to preserve theimportant information in the waveform while at the sametime forcing the signal to become periodic. It must,

Figure 8—The impulse responses for twosingle-degree-of-freedom systems with different amounts of
damping. Each measurement contains exactly the sameamount of noise. The Fourier transform of the heavily damped
system will have more uncertainty because of the poorsignal-to-noise ratio in the last half of the data record.
however, be applied with care, especially when modesare closely spaced, for exponential smoothing can smearmodes together so that they are on longer discernible asseparate modes. Reference 4 explains this in moredetail.
In spite of these problems, the value of impact testingfor modal analysis cannot be overstressed. It provides aquick means for troubleshooting vibration problems. Fora great many structures an impact can suitably excite thestructure such that excellent transfer functionmeasurements can be made. The secret of its successrests with the user and his understanding of the physicsof the situation and the basics of digital signalprocessing.
Step Relaxation TestingStep relaxation is another form of transient testing
which utilizes the same type of signal processingtechniques as the impact test. In this method, aninextensible, light weight cable is attached to thestructure and used to preload the structure to someacceptable force level. The structure "relaxes" with aforce step when the cable is severed, and the transientresponse of the structure, as well as the transient forceinput, are recorded.
Although this type of excitation is not nearly asconvenient to use as the impulse method, it is capable ofputting a great deal more energy into the structure in thelow frequency range. It is also adaptable to structureswhich are too fragile or too heavy to be tested with thehand-held hammer described earlier. Obviously, steprelaxation testing will also require a more complicatedtest setup than the impulse method but the actual dataacquisition time is the same.
Testing a Simple Mechanical SystemA single-degree-of-freedom system was tested with
each type of excitation method previously discussed.Besides measuring the linear characteristics of thesystem with each excitation type, gross non-linearity wassimulated by clipping approximately one-third of theoutput signal. This condition simulates a "hard stop" in anotherwise unconstrained system. The intent of thesetests was to show how certain forms of excitation can beused to measure the linear characteristics of a system
with a large amount of distortion. This is extremelyimportant to the engineer who is interested in identifyingmodal parameters.
Figure 9 illustrates the form of each type of stimulusand its power spectrum after fifteen ensemble averages.Notice that the input power spectrums for both the purerandom and periodic random cases have more variancethan the others. This is because each ensemble averageconsisted of a new and uncorrelated signal for these twostimuli. The pseudo random and swept sine (chirp)signals were controlled by the analyzer’s digital-to-analogconverter and each ensemble average was in fact thesame signal, thus resulting in zero variance. In this test,the transient signal was also controlled by the DAC toobtain record-to-record repeatability and resulting zerovariance. In all cases, the notching in the powerspectrums is due to the impedance mismatch betweenthe structure and the shaker. A final interesting note isthat all spectrums except the swept sine are flat out tothe cut-off frequency. The roll-off of the swept sinespectrum is due to the logarithmic sweep rate. Thus, thespectrum has reduced energy density as the frequency isincreased.Recall that in Part I we discussed the use of thecoherence function to assess the quality of the transferfunction measurement. In Figure 10, the results obtainedfrom testing the single-degree-of-freedom system withand without distortion are shown. In Figures 10A and10B the cases for pure random excitation, notice that thecoherence is noticeably different from unity in the vicinityof the resonance. This is due to the non-periodicity of thesignals and the fact that Hanning windowing was used toreduce what would have otherwise been even moresevere leakage. The leakage effect is much moresensitive here, due to the sharpness of the resonance,i.e., the rate of change of the function. Although theeffect is certainly present throughout the rest of the band,the relatively small changes in response level betweendata points away from the resonance will obviously tendto minimize the leakage from adjacent channels.Although any number of different windowing functionscould have been used, the phenomenon would still exist.
Figures 10C-10J show the results of testing the systemwith the other excitation forms. In all figures showing thedistorted case, the best fit of a linear model to themeasured data is also shown. The coherence is almostexactly unity for the linear cases shown in Figures 10C,E, G and I. This is because all are ideally leakage-freemeasurements because they are periodic in theanalyzer’s measurement window. For the cases withdistortion, the latter three show very good coherenceeven though the system output was highly distorted. Thisapparently good value of coherence is due to the natureof the zero-variance periodic signals used as stimuli. Incases 10B and 10D, the measurements are truly randomfrom average to average and the coherence is moreindicative of the

Figure 9—Different excitation types and their powerspectrums. Each type was used to test a
single-degree-of-freedom system. Fifteen ensemble averageswere used.
quality of the measurement. The low coherence valuesat the higher frequencies are primarily a result of thepoor signal energy available. The conclusion is that thecoherence function can be misleading if one does notunderstand the measurement situation.
Even though the system was highly distorted, it isapparent that the pure random and periodic randomstimuli provided the best means for transfer functionmeasurements, as seen in Figures 10B and 10D. Again,this is due to their ability to effectively use ensemble
Figure 10—Comparison of different excitation types for testingthe same single-degree-of-freedom system with and without
distortion.
averaging to remove the distortion components from themeasurement. The distortion cannot be removed usingthe other types of periodic stimuli and this is evident inFigures 10F, H and J. The results obtained from fitting alinar model to the measured data are given in Table I.
In all cases where the linear motion was measured,each type of excitation gave excellent results, as indeedthey should. The one item worthy of mention is theestimate of damping with the pure random result. In thiscase, the value is about 7% higher than the correct

Table I – Linear model comparison of single-degree-of-freedom system resonance frequency and dampingmeasurements using various excitation and analysis techniques
Test Condition Frequency(Hz)
DampingCoefficient(rad/sec)
Magnitude Phase(deg)
RelativeError
Pure Random………………….. 549.44 56.83 3429.12 0.5 23.1Pure Random w/Distortion…… 550.10 56.22 2963.28 357.1 21.7
Periodic Random……………… 549.46 52.76 3442.18 0.6 3.6Periodic Random w/Distortion.. 549.50 53.44 3272.00 0.4 4.2
Pseudo Random………………. 549.55 52.76 3450.54 0.6 1.8Pseudo Random w/Distortion… 550.09 51.75 2766.06 359.3 32.4
Swept Sine…………………….. 549.49 53.24 3444.01 0.6 2.2Swept Sine w/Distortion………. 549.77 53.76 2411.52 4.5 21.5
Transient……………………….. 549.63 53.75 3453.26 0.7 5.7Transient w/Distortion…………. 549.68 53.13 2200.84 359.4 102.9
BSFA with Pure Random…….. 549.44 53.12 3446.84 0.7 3.2
Table II – Principal characteristics of five excitation methods
CharacteristicsPure
RandomPseudoRandom
PeriodicRandom Impact
Swept Sine(Chirp)
Force level is easily controlled………… Yes Yes Yes No YesForce spectrum can be easily shaped... No Yes Yes No YesPeak-to-rms energy level………………. Good Good Good Poor BestRequires a well-designed fixture and
exciter system……………………….. Yes Yes Yes No YesEnsemble averaging can be applied to
remove extraneous noise…………… Yes Yes Yes Yes YesNon-linearities and distortion effects
can be removed by ensembleaveraging…………………………….. Yes No Yes Somewhat No
Leakage Error…………………………… Yes No No Sometimes No
value. This error is due to the windowing effect on thedata. In this test, a Hanning window was used. However,any number of other windows could have been used anderror would still be present. Further evidence of theHanning effect on the data is shown by the error betweenthe linear model and the measured data.
Of considerable importance is the data for thesimulated distortion. The primary conclusion that can bedrawn from these data is that the periodic randomstimulus provides a good means for measuring the linearresponse of a linear system and is clearly superior to apure random stimulus. It is also the best possibleexcitation for measuring the linear response of a systemwith distortion. Evidence of this is seen in the quality ofthe parameter estimates in Table I and the relative error(the error index between the ideal linear model and themeasured data). The principal characteristics of eachtype of excitation are summarized in Table II.
Increasing Frequency ResolutionCertainly the single most important factor affecting the
accuracy of modal parameters is the accuracy of thetransfer function measurements. And, in general,frequency resolution is the most important parameter in
the measurement process. In other words, it is simply notpossible to extract the correct values of the modalparameters when there is inadequate informationavailable to process. Modern curve fitting algorithms arehighly dependent on adequate resolution in order to givecorrect parameter estimates, including mode shapes.
In this section we will introduce Band SelectableFourier Analysis (BSFA), the so-called "zoom" transform.BSFA is a measurement technique in which the Fouriertransform is performed over a frequency band whoselower and upper limits are independently selectable. Thisis in contrast to standard baseband Fourier analysis,which is always computed over a frequency range fromzero frequency to some maximum frequency, maxF .
From a practical viewpoint, in many complex structures,modal density is so great, and modal coupling (oroverlap) so strong, that increased frequency resolutionover that obtainable with baseband techniques is anabsolute necessity for achieving reliable results.
In the past, many digital Fourier Analyzers have beenlimited to baseband spectral analysis; that is, thefrequency band under analysis always extends from dcto some maximum frequency. With the Fourier

transform, the available number of discrete frequencylines (typically 1024 or 512) are equally spaced over theanalysis band. This, in turn, causes the availablefrequency resolution to be, ( )2max NFf =∆ , where N
is the Fourier transform block size, i.e., the number ofsamples describing the real-time function. There are
2N complex (magnitude and phase) samples in the
frequency domain. Thus, maxF and the block size, N.
determine the maximum obtainable frequency resolution.The problem with baseband Fourier analysis is that, to
increase the frequency resolution for a given value of
maxF , the number of lines in the spectrum (i.e., the block
size) must increase. There are two important reasonswhy this is an inefficient way to increase the frequencyresolution:1. As the block size increases, the processing time
required to perform the Fourier transform increases.2. Because of available computer memory sizes, the
block size is limited to a relatively small number ofsamples (typically a maximum of 4096).
More recently, however, the implementation of BSFAhas made it possible to perform Fourier analysis over afrequency band whose upper and lower frequency limitsare independently selectable. BSFA provides thisincreased frequency resolution without increasing thenumber of spectral lines in the computer.
BSFA operates on incoming time domain data to theanalyzer’s analog-to-digital converter or time domaindata that has previously been recorded on a digital massstorage device. BSFA digitally filters the time domaindata and stores only the filtered data in memory. Thefiltered data corresponds to the frequency band ofinterest as specified by the user. The procedure iscompleted by performing a complex Fourier transform onthe filtered data.Of fundamental importance is the fact that the laws ofnature and digital signal processing also apply to theBSFA situation. Since the frequency resolution is alwaysequal to the reciprocal of the observation time of themeasurement, Tf 1=∆ , the digital filters must processT seconds of data to obtain a frequency resolution of
T1 in the analysis band. Whereas in baseband Fourieranalysis the maximum resolution is always
( )2max NFf =∆ , the resolution with BSFA is
( )2NBWf =∆ where BW is the independentlyselectable bandwidth of the BSFA measurement.Therefore, by restricting our attention to a narrow regionof interest below maxF and concentrating the entire
power of the Fourier transform in this interval, anincrease in frequency resolution equal to BWFmax can
be obtained (Figure 11).
Figure11—Band Selectable Fourier AnalysisTM versusbaseband Fourier analysis. BSFA processes more data to
obtain increased frequency resolution.
Figure 12—Hewlett-Packard's new 54470A FourierPreprocessor gives the HP 5451B Fourier Analyzer greatly
expanded capability for making Band Selectable FourierAnalysis measurements.
Figure 13—Pure random excitation and Band SelectableFourier Analysis were used to test the single-degree-of-
freedom system of Figure 10. The resolution is 18 times betterthan the baseband case shown in figure 10A. Note the
improved coherence between the two sets of data, especiallynear the resonant frequency.
The other significant advantage of BSFA is its ability toincrease the dynamic range of the measuremnt to 90 dBor more in many cases. The increased dynamic range ofBSFA is a direct result of the extremely sharp roll-off andout-of-band rejection of the pre-processing digital filtersand of the increased frequency resolution which reducesthe effect of the white quantizing noise of the analyzer’sanalog-to-digital converter.5 Certain types of BSFA filters

can provide more than 90 dB of out-of-band rejectionrelative to a full scale in band spectral line, acharacteristic which is not matched by more traditionalanalog range translators (see Figure 12).
The simple single-degree-of-freedom system whichwas tested with the various excitation types was alsotested with BSFA using pure random excitation. We sawthat in the baseband case, pure random was the leastdesirable signal because of the associated leakage andthe resulting distortion of the transfer function waveformintroduced by the Hanning window. By using BSFA,leakage is no longer an important source of errorbecause of the great increase in the number of spectrallines used to describe the system. Figure 13 shows thecoherence and transfer function between 524.6 Hz and579.6 Hz with a resolution of 0.269 Hz, an increase ofmore than 18 over the baseband result. Note that thecoherence is almost exactly unity, indicating the absenceof any error due to leakage, and confirming the quality ofthe BSFA measurement. As shown in Table I, the use ofBSFA eliminates the error caused by the leakage in thebaseband measurement.
A Practical Problem. To illustrate the importance ofBSFA, a mechanical structure was tested and modes inthe area of 1225 Hz to 1525 Hz were to be investigated.Figure14 is a typical baseband ( max-dc F ) transfer
function measurement. It was taken with the followingparameters:
Block size………………...………………………1024
maxF ………………………………...………..5000 Hz
Filter cutoff………………………...…………2500 Hzf∆ ………………………………...…………9.765 Hz
Pure random noise was used to excite the structurethrough an electro-dynamic shaker.
The Inadequacy of the Baseband Measurement.Note that two modes are clearly visible between 1225 Hzand 1525 Hz. This same measurement is shown inrectangular or co/quad form in Figure I5. Again, byexamining the quadrature response, the two modes areseen, However, there is also a slight inflection in theresponse between these two modes which indicates thatyet a third mode may be present. But there is insufficientfrequency resolution to adequately define the mode.
Returning to Figure 15, a partial display of the regionbetween 1225 and 1525 Hz was made. The expandedquadrature display is shown in Figure 16. Realize thatthis represents no increase in frequency resolutions onlyan expansion of the plot. Clearly only two modes werefound.
Accurate Measurements with BSFA. In order toaccurately define the modes in this region, the structurewas re-tested using Band Selectable Fourier Analysis(BSFA). All 512 lines of spectral resolution were placedin a band from 1225 to 1525 Hz, resulting in a resolutionof 0.610 Hz instead of 9.76 Hz, as in the baseband
Figure 14—Baseband transfer function shows two modes atapproximately 1320 Hz and 1400 Hz.
Figure 15—Baseband measurement in co/quad form showstwo major modes and a slight inflection between the two which
possibly indicates a third mode. However, there is notenough resolution in the measurement to be sure or to
identify the mode.
Figure 16—Comparison of quadrature response of thebaseband and BSFA result. The BSFA measurement clearly
shows the small third mode and the poor result of thebaseband measurement for the other two modes.

Figure 17—Comparison of the BSFA and baseband transferfunctions between 1225 and 1525 Hz. In the BSFA result,
three modes are clearly visible and well defined. Thebaseband data would have led to considerable error in
estimates of frequency and damping.
measurement. The quadrature response attained withthe BSFA is also shown in Figure 16 for comparativepurposes. Note that three modes are now clearly visible.The small (third) mode of approximately 1350 Hz is nowwell defined, whereas it was not even apparent before. Inaddition, the magnitude of the first mode at 1320 Hz isseen to be at least three times greater in magnitude thanthe result indicated by the baseband measurement. Thecorresponding results in log form are shown in Figure 17.This BSFA result was obtained by using only a 16:1resolution enhancement. Enhancements of more than100:1 are possible with BSFA.
Implications of Frequency Resolution inDetermining Modal Parameters and Mode Shapes.Referring again to Figure 15, we can clearly see thenecessity of using adequate frequency resolution formaking a particular measurement. In addition, it isimportant to understand how the baseband result wouldlead to an incorrect answer in terms of modalparameters and mode shape.1. Modal Parameters. If the baseband result is
compared to the BSFA result for the 1320 Hz modeit is obvious that the baseband result would indicatethat the mode is much more highly damped than itactually is. The second small mode (1350 Hz) wouldnot even be found, and the 1400 Hz mode wouldalso have the wrong damping. Close inspection alsoshows that the estimate of the resonance frequencyfor the 1320 Hz mode would have significant error.
2. Mode Shape. Any technique for estimating the
mode shape coefficients (e.g., quadrature response,circle fitting, differencing, least squares, etc.) wouldclearly be in error since it is apparent that the BSFAresult shows a quadrature response at least threetimes greater than the baseband result.
Although the proceeding example presented a casewhere the use of BSFA was a necessity, it is very easyfor the engineer to be misled into believing he has madea measurement of adequate resolution when in fact hehas not. The following concluding example illustrates thispoint and presents the estimates of the modalparameters for each case.
A disc brake rotor was tested using an electro-dynamicshaker and pure random noise as a stimulus. A load cellwas used to measure the input force and anaccelerometer mounted near the driving point was usedto measure the response. The baseband measurementhad a resolution of 9.76 Hz. As can be seen in Figure18A, the two major modes at about 1360 Hz and 1500Hz appear to be well defined. An expanded display (noincreased resolution) from 1275 Hz to 1625 Hz clearlyshows the two large modes and a much smaller mode atabout 1580 Hz.
The rotor was re-tested using BSFA and the two setsof data are compared in Figure 18. This data clearlyshows the value of BSFA. The BSFA data providesincreased definition of the modal resonances, as can beseen by comparing the baseband and BSFA results. Thevalidity of each result is reflected in the respectivecoherence functions. The baseband transfer functioncontains inaccuracies due to the Hanning effect, as wellas inadequate resolution. The coherence for the BSFAmeasurement is unity in the vicinity of all three modalresonances, indicating the quality of the transfer functionmeasurement. Further proof of the increased modaldefinition is shown in the BSFA Nyquist plot (co versusquad). Here, all three modes are clearly discernible andform almost perfect circles, indicating an excellentmeasurement, almost totally free of distortion. In thebaseband result, only three or four data points wereavailable in the vicinity of each resonance, whereas inthe BSFA data many more points are used.
The modal parameters for all three modes wereidentified from the baseband and BSFA data and theresults are shown in Table III. Comparison of resultsemphasizes the need for BSFA when accurate modalparameters are desired.
In summary, no parameter identification techniquesare capable of accurately identifying modal parametersor mode shapes when the frequency resolution of themeasurement is not adequate.
SummaryWe have seen that frequency response functions can
be used for identifying the modes of vibration of anelastic structure and that the accurate measurement ofthe frequency response functions is the most importantfactor affecting the estimates of the modal parameters.
Pure random, pseudo random, periodic random, sweptsine, and transient techniques for baseband Fourieranalysis were discussed. All types of stimuli, except forpure random, gave excellent results when used fortesting a linear system. The pure random resultcontained some error because its non-periodicity in themeasurement window required that Hanning be used on

Figure 18—Baseband and BSFA inertance transfer functionsfrom a disc brake rotor. The BSFA result gives a better
estimate of the transfer function by using more data points.This results in a better estimate of the modal parameters as
shown in Table III. Note the improved coherence and the cleardefinition of all three modes in the Nyquist display (co versus
quad).the input and response waveforms, resulting in somedistortion of the transfer function.
For systems with distortion, periodic random offerssignificant advantages over the other types of stimuli. It isbest able to measure the linear response of distortedsystems. This means that modal parameters extractedfrom transfer functions measured with periodic randomwill be more accurate. None of the techniques discussedare capable of compensating for inadequate frequencyresolution.
Table III – Comparison of modal parameter test results
Baseband Results, f∆ = 9.765 HzMode Frequency,
HzDamping,
%Amplitude Phase
1 1359.99 0.775 193.51 350.32 1503.92 0.763 483.30 11.13 1584.33 0.273 9.49 336.1
BSFA Results, f∆ = 0.976 HzMode Frequency,
HzDamping,
%Amplitude Phase
1 1359.13 0.669 211.99 352.72 1502.65 0.652 509.52 9.43 1583.50 0.131 11.65 340.8
Error, %, Versus BasebandMode Frequency,
HzDamping,
%Amplitude
1 0 16% 8%2 0 17% 5%3 0 108% 19%
Band Selectable Fourier Analysis was introduced as ameans for arbitrarily increasing the frequency resolutionof the frequency response measurement by more than100 times over standard baseband measurements.BSFA’s increased resolution provides the best possiblemeans for making measurements for the identification ofmodal parameters and, in a great number of practicalproblems, is the only feasible approach.
References1. Fourier Analyzer Training Manual, Application Note
140-0, Hewlett-Packard Company.2. Ramsey, K. A., "Effective Measurements for
Structural Dynamics Testing, Part I," Sound andVibration, November 1975.
3. Roth, Peter, "Effective Measurements Using DigitalSignal Analysis," IEEE Spectrum, pp. 62-70, April1971.
4. Richardson, M., "Modal Analysis Using Digital TestSystems," Seminar on Understanding Digital Controland Analysis in Vibration Test Systems, Shock andVibration Information Center publication, May 1975.
5. McKinney, W., "Band Selectable Fourier Analysis,"Hewlett Packard Journal, April 1975, pp. 20-24.
6. Potter, R., and Richardson, M., "Mass, Stiffness andDamping Matrices from Measured ModalParameters," ISA Conference and Exhibit New YorkCity, October 1974.
7. Potter, R., “A General Theory of Modal Analysis forLinear Systems," Shock and Vibration Digest,November 1975.





























