-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
1/19
-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
2/19
2/19
Examples of Solving Differential Equations using LT
Notice how easy this is!
-LT converts the differential equation into an algebraic
equation
-We can easily solve an algebraic equation for an output
Y (s)
-We can do partial fraction expansion
-We can use the LT tableBut, this is where the hard part
lies…although it is easy for certain inputs.
-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
3/19
3/19
Example 6.29: 2nd Order Differential Equation
Given )(2)(8)(6)(2
2
t xt ydt t dy
dt t yd =++
Find the output y(t ) for t ≥ 0 when the input
is x(t ) = u(t )
2)0(1)0( ==
−−
yand y &
1
)(t x
t
Input “starts” att = 0
Assume that the system has ICs given by:
-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
4/194/19
Gives: [ ] [ ] )(2)(8)0()(6)0()0()(2
s X sY yssY ys ysY s
=+−+−− −−− &
Solving for Y (s) algebraically gives:
)(
86
2
86
)0(6)0()0()(
22 s X
ssss
y ys ysY
++
+
++
++=
−−−&
Using the specific IC’s gives:
)(86
286
8)(22 s X
ssss
ssY ⎥⎦⎤
⎢⎣⎡
+++⎥⎦
⎤⎢⎣⎡
+++=
IC part H (s) “Transfer Function” (notice howthis
comes directly from the D.E.)
)(2)(8)(
6)(
2
2
t xt ydt
t dy
dt
t yd =++Applying the LT to this D.E.
-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
5/195/19
Notice how the IC part can be easily found using PFE and
an LT table (Forlinear, constant coefficient differential equations
it will always be like that!)
)(
86
2
86
8)(
22 s X
ssss
ssY ⎥
⎦
⎤⎢
⎣
⎡
++
+⎥
⎦
⎤⎢
⎣
⎡
++
+=
IC part H (s) “Transfer Function” (notice howthis
comes directly from the D.E.)
Notice that the input part may not be easy to do PFE/ILT
if theinput X (s) is complicated.
But in control systems and sometimes in electronics we are often
interested in howthe system responds to a step function → Called
the “step response”
ss X t ut x 1)()()( : Note
=↔=
-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
6/196/19
⎥⎦
⎤⎢⎣
⎡
+++⎥⎦
⎤⎢⎣
⎡
++
+=
)86(
2
86
8)(
22sssss
ssY
IC part Input part
( )[ ]( )
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−=
+−
−=
+−
−
−
n
n
n
n
t
n
n
A
t ut Ae
ζω α
ζ ω φ
ζ
ζω β
φ ζ ω
ω α
ζω
21
2
2
2
1tan
11
:where
)(1sin
22
2 nnss
s
ω ζω
α β
++
+
First… compare to this:
Is… 0< | | < 1?
06.124/62/662
228
182
===⇒=
=⇒=
==
nn
nn
ω ζ ζω
ω ω
β α And identify:
No!!!So… factor!!
-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
7/197/19
⎥
⎦
⎤⎢
⎣
⎡
+++⎥
⎦
⎤⎢
⎣
⎡
++
+=⎥
⎦
⎤⎢
⎣
⎡
+++⎥
⎦
⎤⎢
⎣
⎡
++
+=
)2)(4(
2
)2)(4(
8
)86(
2
86
8)(
22
sssss
s
sssss
ssY
Doing PFE:
>> [R,P,K]=residue([1 8],[1 6 8])R =
-23
P =-4-2
K =[]
>> [R,P,K]=residue(2,[1 6 8 0])R =0.2500
-0.50000.2500
P =-4-20
K =[]
⎟
⎠
⎞⎜
⎝
⎛
⎥⎦
⎤
⎢⎣
⎡+
⎥⎦
⎤
⎢⎣
⎡
+
−+
⎥⎦
⎤
⎢⎣
⎡
+
+⎟
⎠
⎞⎜
⎝
⎛
⎥⎦
⎤
⎢⎣
⎡
+
+
⎥⎦
⎤
⎢⎣
⎡
+
−=
sssss
sY 25.0
2
5.0
4
25.0
2
3
4
2)(
IC part Input part IC part Input part
Factored!!!
IC part SS partTransient part
-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
8/19
8/19
0,4/12/14/132)( 2424 ≥+−++−= −−−−
t eeeet y t t t t
4/14/1 0 =t e
Specifyingthis means
we can leaveoff the u(t )’s
Using the LT table:
⎟ ⎠
⎞⎜⎝
⎛ ⎥⎦
⎤⎢⎣
⎡+⎥⎦
⎤⎢⎣
⎡
+
−+⎥⎦
⎤⎢⎣
⎡
++⎟
⎠
⎞⎜⎝
⎛ ⎥⎦
⎤⎢⎣
⎡
++⎥⎦
⎤⎢⎣
⎡
+
−=
ssssssY
25.0
2
5.0
4
25.0
2
3
4
2)(
complexorreal),( bt ue bt −
complexorreal,1
bbs +
IC part SS partTransient part
IC part SS partTransient part
-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
9/19
9/19
Note: IC part & Transient part have the same kind of
decaying parts:These come from the system’s characteristic
polynomial!
t t ee24 & −−
Note: The book combined Y (s) into one big thing and
found y(t ) from that.Same answer…but we cannot see the
impact of three parts!
0,4/12/14/132)( 2424 ≥+−++−= −−−−
t eeeet y t t t t
IC part SS partTransient part
-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
10/19
10/19
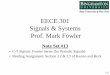
Plots for ex. 6.29
Zero state system takes time to respond to step input
Zero state “transient”
Eventually the IC’s decay away, the ZS transient diesand the
system reaches its “steady-state” response
-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
11/19
11/19
Now Modify Example 6.29: 2nd Order Differential Equation
)(2)(8)(
6)(
2
2
t xt ydt
t dy
dt
t yd =++
)(2)(8)()(
2
2
t xt ydt
t dy
dt
t yd =++
18.024/12/112
228
18
2
===⇒=
=⇒=
==
nn
nn
ω ζ ζω
ω ω
β α
And identify:
Was…
Now…
⎥⎦
⎤⎢⎣
⎡
+++⎥⎦
⎤⎢⎣
⎡
++
+=
)86(
2
86
8)(
22sssss
ssY
IC part Input part
⎥⎦
⎤⎢⎣
⎡
+++⎥⎦
⎤⎢⎣
⎡
++
+=
)8(
2
8
8)(
22 sssss
ssY
IC part Input part
Is… 0< |
| < 1? Yes… Complex Roots… so use oneof the 2nd order LT
Pairs
-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
12/19
-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
13/19
13/19
⎥⎦
⎤⎢⎣
⎡
++
+−+⎥⎦
⎤⎢⎣
⎡
++
+=
8
125.0
25.0
8
8)(
22ss
s
sss
ssY
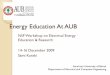
)4.178.2sin(25.025.0)36.078.2sin(87.2)( 5.05.0 +−++= −−
t et et y t t
LTTable
Zero-InputResponse
Zero-StateResponse
TotalResponse
-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
14/19
14/19
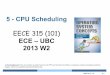
Compare the Two Cases:
)2)(4(
2
86
2)(
2 ++=
++=
sssss H
)78.25.0)(78.25.0(
2
8
2)(
2 js jsss
s H ++−+
=++
=
σ
jω
σ
jω
-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
15/19
15/19
Ex. 6.38 “RLCLC” Circuit
In analyzing circuits we often
-Have zero IC’s
-Have no specific input signal in mind
We only want to find the transfer function and/or the frequency
response⇒
Suppose you must analyze the following circuit to find the
current through C 1
(You might need to do that because in the physical circuit there
is a device being
driven by that current and that device has an input impedance
that is modeled as acapacitor)
)(t x device )(t y
⇒
C2
C1
Re-Drawn Versionof Fig. 6.13… but
equivalent!!
-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
16/19
16/19
Now, replace “device” by its capacitor model and find the
transfer function between:
input = voltage x(t )output =
current y(t )&
Use s-domain impedances Ls
1/Cs
And analyze the circuit as if X (s) is a DC
voltage source.
[ ] 1)()()(
212
222113
2214
2121
13
221
+++++++
+=
sC C RsC LC C Ls LC RC s L LC C
sC s LC C s H
Note that there are 6 “adjustable” coefficients but only 5
adjustable componentvalues
⇒ Can’t achieve all possible coefficient combinations
This is the wholeidea behind the LT
approach!!
Can find that (see book for details):
-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
17/19
17/19
( )[ ] 2121212121
2212122211
31
422
21
/1/)(/)()/(
/1)/1()(
L LC C s L LC C C C Rs L LC C C LC C Ls L Rs
LC ss Ls H
+++++++
+=
A zero “at the origin”forces low frequencies
to be attenuated
A purely-imaginary-rootsterm… puts conjugate zeroson the jω
axis… nulls one
specific frequency
T h hi i i d l k i f Thi i lid
-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
18/19
18/19
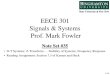
To see what this circuit can do we look at its frequency
response. This is valid because all poles are in the region of
convergence. (True for any passive RLCcircuit)
Get H (ω ) by replacing
s→ jω
The following plot shows | H (ω )| for two sets
of component values
similarities…
but differences!! Note
How do we choose the component values to do what we want?!
STAY TUNED!!!
-
8/17/2019 EECE 301 Discussion 10 Laplace Transform
Examples_2.pdf
19/19
19/19
Due to a pole
near the jω axis
Due to zeros on
the jω axis
157 Hz1570 Hz 157 kHz