Embed Size (px)
Citation preview
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina1
ECONOMICS - Urban, Rural, and Regional Economics
JEL R4 - Transportation Systems
Ed. Transmitworld 2013
ISSN: 2280-1901 Transmitworld (Verona) [Online]
Sistemi dinamici lineari e non lineari di analisi e gestione del traffico autostradale, a definizione
dei parametri di conto per la previsione, a breve termine, di una gestione economica virtuosa
delle tratte autostradali
di Moreno Ferrarese1
Abstract; 1. Lo scenario; 2. L’approccio metodologico all’incidentalità; 3. I modelli di studio; 4.
Affidabilità dei modelli; 5. L’analisi modellata del traffico; 6. Approccio spazio-temporale delle
distanze di sicurezza autostradali; 7. L’utilizzo del modello MPCA a definizione dei parametri di
conto; 8. Conclusioni; Bibliografia; Appendice 1; Appendice 2.
Abstract
La puntuale e affidabile assegnazione di parametri di scenario economico, finalizzati alla
programmazione della circolazione veicolare (auto)stradale, non può prescindere dall’analisi dei
parametri di sicurezza autostradale come elementi confliggenti nella capacità decisionale del
management in condizioni di crisi. Viene presentato un nuovo metodo per la ricerca dell’equilibrio
economico dell’infrastruttura autostradale a breve termine.
The precise and reliable assignment of parameters of economic scenery, aimed at planning of
motorway traffic, can not be separated from the analysis of the parameters of highway safety as
conflicting elements in the decision-making capacity management in crisis conditions. We present a
new method for the economic balance of the motorway infrastructure in the short term.
Keyword: sicurezza stradale-conto economico-modello gestionale autostradale
1. Lo scenario
Le notizie di cronaca ci hanno abituato ad ascoltare d’incidenti autostradali con decine di vittime e
con danni ai veicoli e alle infrastrutture, fattori che impegnano le società autostradali concessionarie
a rivedere continuamente i piani della sicurezza e il posizionamento dei cantieri fissi e mobili, in
ragione della necessità di provvedere ad assicurare elevate velocità veicolari in rapporto alle
condizioni giuridiche d’esercizio - per il cui scopo vengono costruite le autostrade e le strade a
scorrimento veloce - e la sicurezza dei conducenti i veicoli nelle diverse sezioni autostradali.
In alcune condizioni, particolarmente quelle critiche, date dalla stagionalità, dalla periodicità del
traffico, dallo scorrimento orario e dalle condizioni meteorologiche, che sono fattori naturali
incidenti sulla sicurezza autostradale, assieme all’attivazione di sistemi manutentivi o migliorativi 1 Già professore titolare dell’insegnamento di Economia dei Trasporti e della Mobilità – Università degli Studi di Verona
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina2
della circolazione, dati dai cantieri mobili oppure fissi, come fattori tecnici che interferiscono sulla
sicurezza, si verificano perturbazioni alla circolazione dei veicoli autostradali che generano
incidentalità.
Kroes e Sheldon (Kroes E.P., Sheldon R.J., 1988) indicano la frequenza generale degli incidenti in
autostrada, in presenza di congestione, come quasi doppia di quella su autostrade in presenza di
condizioni di deflusso libero. Per salire a tali casi, poiché l’aumento delle capacità delle autostrade
non sempre è possibile attraverso le manutenzioni migliorative, talora è preferibile ricorrere ad altri
approcci tra i quali la regolazione del deflusso che ha per obiettivo primario la riduzione della
congestione e dell’incidentalità.
Nel deflusso, i flussi di veicoli o persone, regolano il proprio moto unitario, dato da comportamenti
di guida o di andatura, che inducono i conducenti o i pedoni a regolare la propria velocità e le
proprie traiettorie in riferimento a posizioni e spostamenti degli altri veicoli e pedoni, attraverso
scelte temporali, di costo, di sicurezza, di comfort.
L’assegnazione dinamica dei flussi permette di riprodurre il carico variabile nel tempo in ogni
sezione dell’infrastruttura autostradale e consente, quindi, di prevedere l’insorgere di fenomeni di
congestione dovuti a un eccesso di domanda rispetto alla capacità locale della via. Offre, altresì,
l’opportunità di valutare sia l’incidenza percentuale del flusso proveniente da ogni particolare
rampa di accesso sul valore globale del carico previsto in un punto qualsiasi della rete, sia quando il
flusso entrante verrà a trovarsi in un punto critico in funzione della velocità di marcia (Camus,
Longo, Santorini, 1995).
Considerando che le modalità di deflusso sono differenti per le intersezioni tra i differenziati
elementi della via e le fermate dei sistemi di trasporto pubblico (nodi) e per gli elementi di via
compresi tra un nodo e l’altro (archi), la realizzazione delle condizioni di sicurezza e di comfort
viene usualmente normoregolata, con modalità variabili da una modalità di trasporto all’altro e, per
lo stesso modo di trasporto, secondo l’elemento viario considerato. Il sistema di regolazione è,
pertanto, costituito da un pacchetto di regole di circolazione (es. codice della strada, codice della
navigazione, regolamento di circolazione treni).
Per esempio, nel deflusso sugli archi la condizione di sicurezza stradale veicolare consiste nel
mantenere la distanza di sicurezza dell’inseguitore, sul veicolo antecedente, lungo una traiettoria
intercettata da entrambi. Nel deflusso attraverso un nodo veicolare, laddove le diverse correnti
veicolari condividono l’uso di un elemento comune della via, la decisione è relativa all’impegno
dell’area comune.
In genere, nella circolazione veicolare su tutte le infrastrutture a terra, una modalità di marcia è
denominata a densità libera, quando l’attuazione della condizione di sicurezza sugli archi viene
interamente caricata sulla responsabilità del conducente (es. autoveicoli, autobus); è a densità
controllata, quando il distanziamento tra veicoli è fisso o controllato da un sistema di segnalamento
(es. impianti a fune, funicolari, metropolitane, ferrovie); è a densità mista quando il distanziamento
tra veicoli su sede stradale propria o mista è in parte autoregolato, in parte sotto segnalamento (es.
ferrotramvie).
2. L’approccio metodologico all’incidentalità
Per quanto riguarda i modelli di flusso/deflusso tradizionali, individuiamo che le condizioni di
funzionamento sono descritte, normalmente, attraverso la valutazione di tre grandezze:
la velocità media

This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina3
il flusso o portata f
la densità2 veicolare k
Per qualsiasi scelta coerente delle definizioni operative delle grandezze citate, sussiste, fra esse, la
seguente equazione di congruenza (Ascione L., Grimaldi A., 1989), definita anche modello di
deflusso veicolare:
(1)
Quindi, l’equazione fondamentale del flusso, che deriva dall’analisi macroscopica dell'evoluzione
dinamica di un'infrastruttura, avviene studiando il variare delle grandezze medie fondamentali,
consentendo di rappresentare come proiezioni bidimensionali le relazioni tra le variabili
macroscopiche flusso, densità, velocità (Florio, Mussone, 1998). Vengono, pertanto, utilizzati dei
modelli matematici, basati su rilevazioni empiriche, che legano tra loro queste grandezze3.
2 In alcuni studi sperimentali la densità viene sostituita con l’occupazione percentuale R, che può venire misurata
attraverso sistemi di rilevamento magnetici. La densità K e l’occupazione percentuale R sono in media legate da un
rapporto di proporzionalità (Ferrari et alii, 1991). 3 I termini utilizzati nelle pagine successive, adottano le definizioni:
fc = capacità della strada
fm = valore massimo del flusso veicolare
vc = velocità massima praticabile a flusso nullo
vm = velocità alla quale il flusso è massimo
= velocità “libera”
kc = densità critica, o densità per flusso di saturazione
km = densità alla quale il flusso è massimo
kj = jam density, o densità d’arresto (a deflusso impossibile)
Ogni collezione di veicoli è caratterizzata da un proprio flusso e da una propria densità.
Si consideri, ora, un insieme di veicoli che attraversano una sezione Z, in un periodo T. Si definisce come:
flusso f , il numero di veicoli che, attraversa la sezione Z nell'unità di tempo T.
Viene calcolato come il rapporto tra il numero n di veicoli, che attraversano la sezione Z nel periodo T, cioè:
(A.1)
Per distanziamenti tra i singoli veicoli hi con n elevato, la somma dei singoli distanziamenti è coincidente con il periodo
T , cioè:
(A.2)
Dividendo entrambi i membri per n si ottiene la relazione:
(A.3)
ovvero che
LEMMA 1: l'inverso del flusso è quasi uguale al distanziamento medio temporale tra i veicoli nell'infrastruttura.
Si definisce come:
densità k, il numero di veicoli in un generico istante, insistenti nell'unità di lunghezza dell'infrastruttura.
La densità k si calcola come il rapporto fra il numero n di veicoli, che insistono nell’istante generico in un tronco
stradale di lunghezza L, e L:
(A.4)
In modo analogo, per plurime misurazioni e per distanze omogenee i-esime (di), si può approssimare la distanza al
tronco L come:
(A.5)
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina4
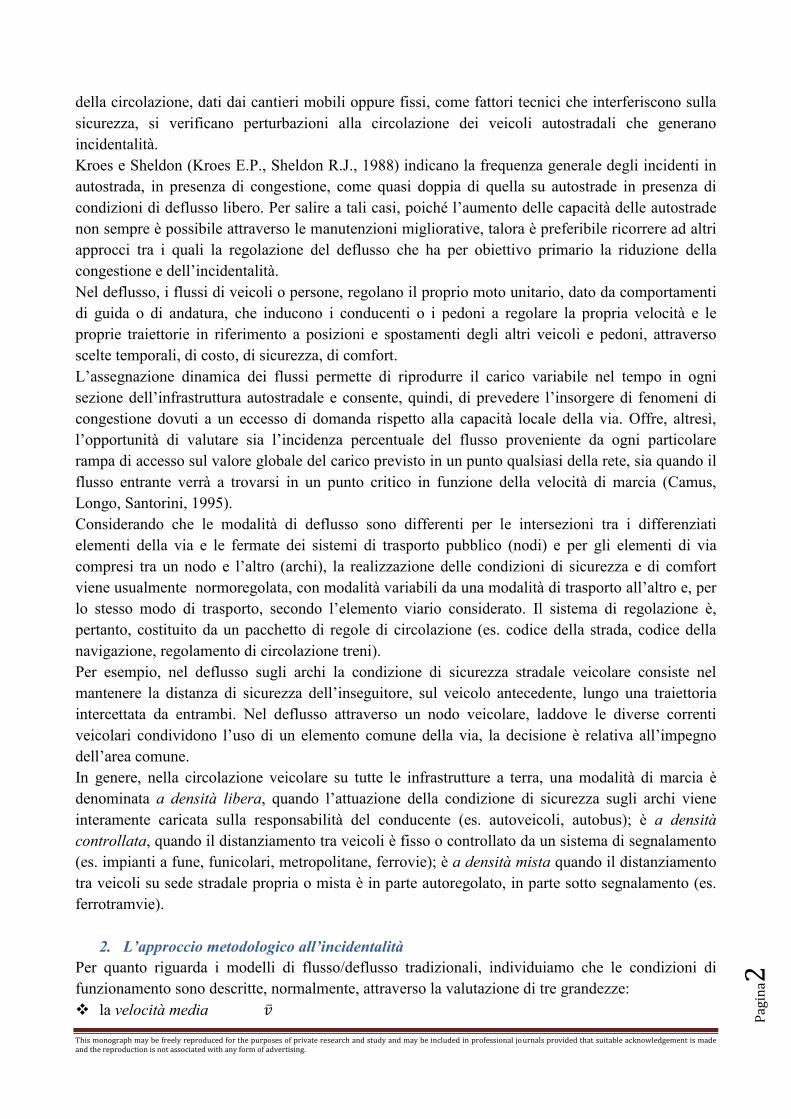
Nell'andamento del flusso/deflusso dei veicoli autostradali si evidenziano due comportamenti sotto
descritti:
1) velocità media coindice con la velocità di flusso libero cioè la velocità massima praticabile
al tendere a zero della densità, con la portata in calo a zero
2) la velocità media e la portata tendono a zero, al tendere della densità o jam density, al suo
valore massimo, cioè la densità "limite" o "di arresto" kj
Come conseguenza, ad una certo valore di densità critica kc< kj e alla corrispondente velocità v, il
flusso assume un valore massimo fc pari alla capacità della strada.
Aumentando il numero di veicoli che transitano nell'unità di tempo attraverso una sezione la
velocità media del singolo veicolo diminuisce e si stabilisce, così, un rapporto di correlazione fra
velocità media e densità k.
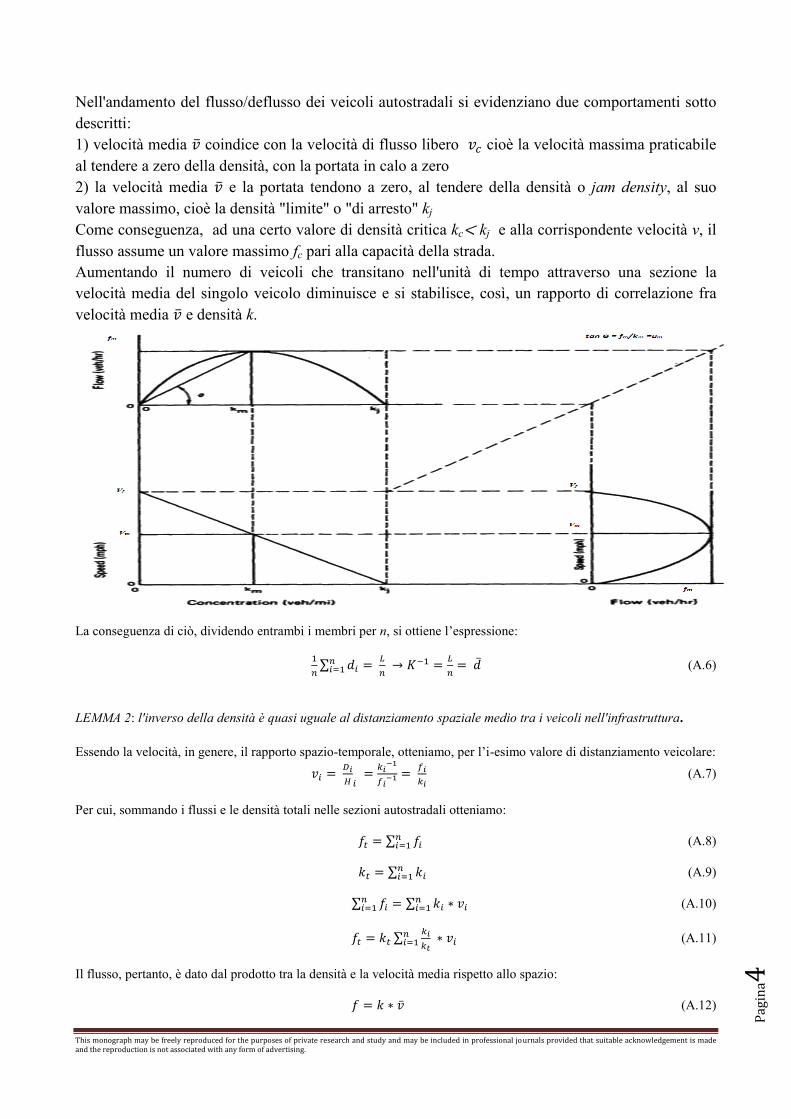
La conseguenza di ciò, dividendo entrambi i membri per n, si ottiene l’espressione:
(A.6)
LEMMA 2: l'inverso della densità è quasi uguale al distanziamento spaziale medio tra i veicoli nell'infrastruttura.
Essendo la velocità, in genere, il rapporto spazio-temporale, otteniamo, per l’i-esimo valore di distanziamento veicolare:
(A.7)
Per cui, sommando i flussi e le densità totali nelle sezioni autostradali otteniamo:
(A.8)
(A.9)
(A.10)
(A.11)
Il flusso, pertanto, è dato dal prodotto tra la densità e la velocità media rispetto allo spazio:
(A.12)
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina5
Figura 1. Relazione velocità, flusso, densità. Andamento delle curve f(k), v(k).
La relazione f= k * v corrisponde in modo seriale a una relazione di deflusso v(k) per la funzione
f(k)=k*v(k). La curva f(k) ha un andamento come la curva v(k):
1. nello studio delle curve si notano dei flussi intermedi con uno o più punti di massimo fra i due
punti di nullo rispetto alle curve sottese, con la funzione f-v che viene derivata dalla funzione v-
k
2. per la relazione intercorrente fra le tre variabili f, k, v, esisteranno, così, due punti a flusso nullo,
quello in cui la densità é nulla e la velocità di deflusso massima e quello in cui la densità é
massima e la velocità è nulla
3. per densità critiche kc si osserva un flusso nullo quando i primi veicoli di una colonna
rimangono fermi, per cui quelli successivi sono costretti all’arresto (il cosiddetto effetto
elastico), come nel caso di code generate dai segnali di traffico e come accade su strade libere in
caso di eventi occasionali o di cantieraggio variabile in autostrada
4. a densità nulla non si ottiene deflusso, con la conseguenza che la curva f-k intercetta l'origine
degli assi coordinati; essendo la velocità media data dal rapporto f/k, il coefficiente angolare
con cui la curva parte dall'origine rappresenta la velocità di flusso libero e coinciderà anche con
l’inclinazione massima della curva
5. la legge v(k) descrive l’andamento della velocità al crescere del numero di veicoli presenti in un
tronco di strada e rappresenta, quindi, il ben noto fenomeno della congestione, o, più in
generale, del condizionamento veicolare (in condizioni teoriche): al crescere della densità media
si riduce la velocità della corrente/plotone, il ché vale a dire che una corrente/plotone di traffico
denso (con veicoli molto ravvicinati) è meno veloce di una corrente/plotone di traffico fluido,
con veicoli molto distanziati tra loro.
La curva f-v avrà, dunque, un punto sull'origine e uno sull'asse delle velocità al valore
corrispondente alla velocità massima (vd. la proiezione delle curve f-v-k, secondo il metodo
Monge): se la curva v-k é una rettifilo di Greenshields, la risultante curva f-v é una parabola.
Per sommario, la valutazione e la previsione delle variazioni di stato, dal flusso libero alla
congestione e viceversa, potendo avvenire per valori di flusso non necessariamente prossimi alla
capacità critica (Forbes, Hall, 1990) si rappresentano come un processo di non linearità.
Altri studi, (Ferrari, 1980; 1988; 1989; 1990) mettono attenzione sul controllo del parametro della
velocità (che si dimostra essere un processo ergodico di classe ARMA integrato a media mobile del
primo ordine, la cui previsione può essere utilizzata per la valutazione della stabilità del flusso.
D’influenza per le caratteristiche del flusso possono essere, in molti casi, le condizioni
meteorologiche ambientali, quali pioggia, neve, nebbia, luminosità, ecc.
In tali casi, il rapporto tra velocità media ed i parametri caratteristici della distribuzione dei tempi di
percorrenza, dipende da alcune variabili indipendenti, quali le condizioni atmosferiche e dalla
congestione.
3. I modelli di studio
Com’è noto, gli approcci metodologici principali, definiti in relazione alle classi d’intervento, sono
raggruppati in tre classi di riferimento, evidenziate dai sottoposti modelli di studio:
A. Velocità/Densità
a) Modello lineare di Greenshield
b) Modello logaritmico di Greenberg

This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina6
B. Flusso/Densità
a) Modello parabolico
b) Modello logaritmico
C. Velocità/Flusso
a) Flussi ininterrotti
b) Reti neurali
A. Velocità/Densità
a) Modello lineare di Greenshield
Il modello lineare di Greenshields correla la velocità e la densità, poiché, all’aumentare della
densità veicolare su una corsia o su una strada, i conducenti tendono a diminuire spontaneamente la
velocità dell’autoveicolo.
Inizialmente il modello lineare di Greenshield nasce interpolando i dati della velocità e della
densità, raccolte con aerofotografie, secondo l’equazione:
(2)
con:
è la velocità media di “libero flusso” (velocità isotachica media, relativa a veicoli che
percorrono in modo isolato, ovvero, in assenza totale di condizionamenti reciproci, il tratto
di strada oggetto dello studio)
k è la densità veicolare istantanea
kj è il valore massimo/critico della densità di traffico per sezione/tratta in corrispondenza
della quale la velocità del deflusso si annulla (quando il deflusso è impossibile)
Il modello di Greenshields postula, quindi, una relazione lineare decrescente della velocità media
del deflusso con la densità.
A. Velocità/Densità
b) Modello logaritmico di Greenberg
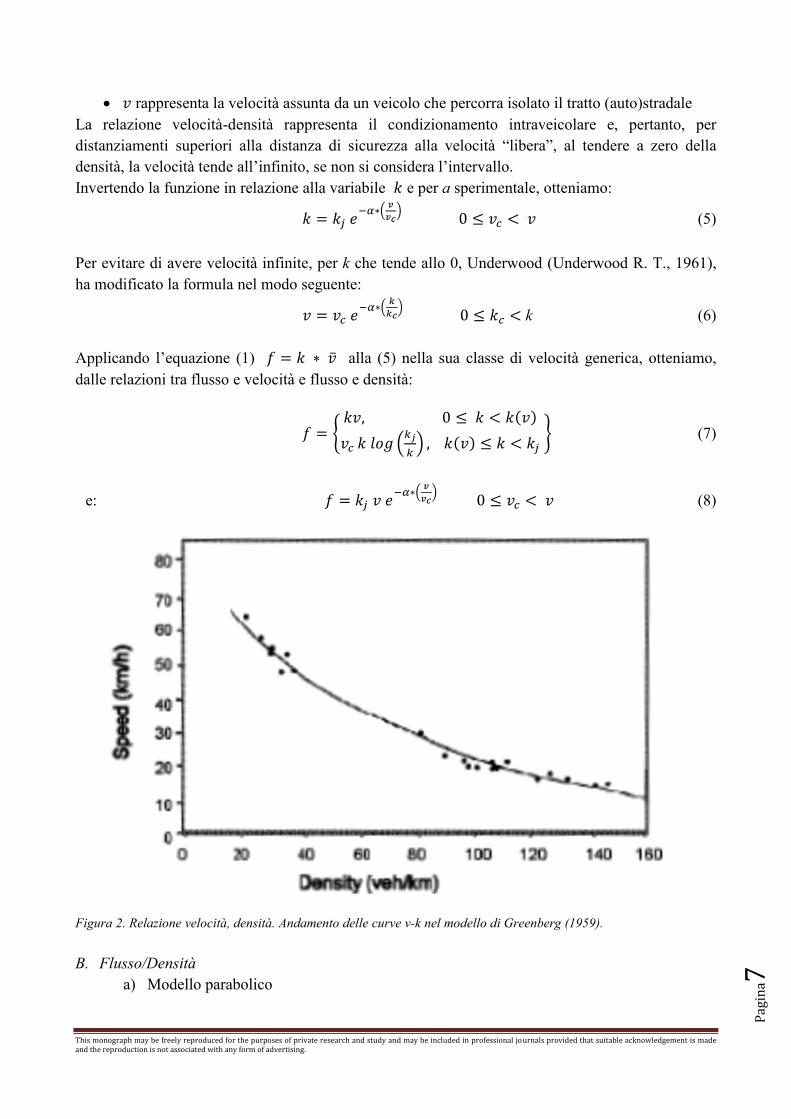
Il modello teorico e sperimentale logaritmico di Greenberg (1959), teorizza e verifica
sperimentalmente, per lo stato stazionario, un legame di tipo logaritmico tra velocità e densità,
secondo l’equazione:
(3)
per l’intervallo:
(4)
dove:
è la velocità massima praticabile al tendere a zero della densità, con la portata calante allo
zero
k è la densità veicolare istantanea
kj è il valore d’arresto della densità di traffico per sezione/tratta
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina7
rappresenta la velocità assunta da un veicolo che percorra isolato il tratto (auto)stradale
La relazione velocità-densità rappresenta il condizionamento intraveicolare e, pertanto, per
distanziamenti superiori alla distanza di sicurezza alla velocità “libera”, al tendere a zero della
densità, la velocità tende all’infinito, se non si considera l’intervallo.
Invertendo la funzione in relazione alla variabile e per a sperimentale, otteniamo:
(5)
Per evitare di avere velocità infinite, per k che tende allo 0, Underwood (Underwood R. T., 1961),
ha modificato la formula nel modo seguente:
k (6)
Applicando l’equazione (1) alla (5) nella sua classe di velocità generica, otteniamo,
dalle relazioni tra flusso e velocità e flusso e densità:
(7)
e:
(8)
Figura 2. Relazione velocità, densità. Andamento delle curve v-k nel modello di Greenberg (1959).
B. Flusso/Densità
a) Modello parabolico

This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina8
Il modello parabolico flusso-densità deriva dal modello lineare di Greenshield (velocità-densità),
mediante la sostituzione della velocità (vd. figura 1):
(9)
che, ponendo k = km e derivando rispetto a k otteniamo:
(10)
Ma, essendo otteniamo:
(11)
che si sostituisce, ottenendo:
(12)
(13)
Analogamente, partendo dal modello v-k lineare di Greenshield della (2) e sostituendo dal modello
e nella relazione f = k v, è possibile in modo analogo definire il legame funzionale tra le variabili
flusso e velocità:
(14)
(15)
con massimo in :
(16)
Per un valore nullo del flusso si verificano due situazioni: una situazione di velocità nulla o una
situazione di velocità libera per condizioni d’infrastruttura satura o vuota, come sotto descritta:
(17)
Flusso/Densità
b) Modello logaritmico
Il modello logaritmico flusso-densità deriva dal modello di Greenberg sostituendo la (3) nella (1):
(18)
che, ponendo k = km e derivando rispetto a k otteniamo:
(19)
Poiché
per
= 1
otteniamo la condizione di flusso massimo
(20)

This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina9
Con velocità di flusso massimo.
Per la relazione velocità-flusso, esplicitando il modello logaritmico v-k in funzione di v si ha:
(21)
(22)
L’equazione (23) denuncia un valore nullo di flusso quando la velocità assume il valore nullo o
tende a infinito.
Il valore di flusso massimo si ottiene per una v = vm che si rappresenta come:
(23)
Velocità/Flusso
a) Flussi ininterrotti
Dal modello di Greenshields, poiché per flussi veicolari ininterrotti abbiamo:
(24)
con:
(25)
Per cui, sostituendo:
(26)
C. Velocità/Flusso
b) Reti neurali
Per ultimo, in un approccio con reti neurali il modello di riconoscimento ha la struttura R7—R
1.
Per densità, meteo, visibilità, luminosità, percentuale di veicoli pesanti, messaggi a pannello, flusso,
si ha flusso stabile con D1> 0, instabile con D
1 < 0 e critico con D
1 = 0.
Sebbene le reti neurali si siano dimostrate buoni controllori di processo nel campo della robotica la
comunità scientifica ha riscontrato l’inefficienza per un settore come quello del traffico. Sono da
preferirsi sistemi di controllo a piani determinati che hanno costi inferiori e un’efficienza di non
molto inferiore a quella che si ottiene con sistemi di controllo in tempo reale (Torrieri, 1998).
Oltre ai citati modelli, esistono altri modelli di studio, che affrontano i legami funzionali della
relazione v-k, come ad esempio, l’esponenziale negativa (Underwood, 1961; Edie, 1960), il
discontinuo o biregime, la generalizzazione polinomiale del modello di Greenshields, fino a forme
fondate sulla teoria delle catastrofi nel piano tridimensionale f-v-k e ai modelli di deflusso di
Daganzo et alii (Daganzo C.F., Cassidy M.J., Bestini R.L., 1999) che utilizzano una relazione
funzionale di forma triangolare per il legame f-k.
4. Affidabilità dei modelli
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina1
0
Le sezioni dove è più frequente l’innesco di criticità di traffico sono quelle in prossimità degli
accessi (Torrieri, 1998).
L’affidabilità, quale indicatore d’instabilità, è data dalla probabilità che, in un dato intervallo di
tempo predefinito, a partire dall’istante in cui l’affidabilità viene misurata, non si verifichino cadute
di velocità; consiste, in sostanza, nella predisposizione di opportuni piani di controllo predefiniti,
basati sull’analisi storica dei dati di deflusso, in grado di monitorare alcune sezioni chiave
dell’infrastruttura. E’ possibile, così, predisporre dei piani di controllo programmati per alcune
situazioni che si prevede possano verificarsi più frequentemente per la data infrastruttura. In questo
modo, il controllo può estendersi per tratti più lunghi, quali, ad esempio, i tronchi compresi tra due
accessi. Ferrari evidenzia che l’adozione di piani di controllo precalcolati fornisce dei buoni
risultati, in alcune situazioni poco discosti da quelli ottenuti con il controllo reale (Ferrari, 1998).
L’affidabilità del sistema può decrescere con il numero di utenti informati, in quanto i sistemi di
informazione sviluppati in tal senso sono obsoleti poiché si limitano a fornire dati sulla strada
migliore senza tenere conto di come le informazioni fornite influenzano la situazione futura.
L’informazione migliore che è possibile fornire all’utente è quella predittiva e nel contempo
affidabile (Ben Akiva et alii, 1991).
I benefici dati dal sistema di controllo potrebbero venire annullati da tre fenomeni principali
negativi: sovrasaturazione da informazione, iper-reazione degli utenti, concentrazione (Ben Akiva
et alii, 1991).
Al fine del controllo delle condizioni della circolazione in ambiente (auto)stradale, può essere utile
rilevare il grado di condizionamento del flusso veicolare. Un veicolo può essere definito “libero” se
ha piena libertà di movimento latitudinale, longitudinale, obliquo per corsia, nel senso che può
spostarsi alla velocità desiderata ed occupare la corsia preferita, come pure si può ritenere libero se
è isolato. Esso può venire, invece, condizionato4 dal:
a) rispetto al mantenimento della velocità desiderata
b) rispetto alla libertà di cambio corsa
Ogni utente stradale, generalmente, cerca di sfuggire al condizionamento derivante dalla presenza di
altri veicoli cambiando, ove possibile, corsia di marcia. Se sulla corsia adiacente non esistono gap
temporali sufficientemente ampi, l’utente sarà costretto a ridurre la propria velocità accodandosi al
precedente. Dai dati sperimentali risulta che l’esigenza di attuare il cambio di corsia aumenti al
crescere della densità per le correnti veicolari in transito sulle singole corsie. Le opportunità di
trovare distanziamenti interveicolari liberi diminuisce su tutte le corsie all’aumentare della densità
di flusso (Torrieri et alii, 1994).
Tra i fattori perturbativi che possono influenzare significativamente la qualità della circolazione
veicolare su un’arteria autostradale rientrano le rampe d’ingresso e d’uscita.
Torrieri (1998) sottolinea come le condizioni di conflitto e di perturbazione nel traffico autostradale
modifichino, facendolo scadere, il livello di servizio dell’infrastruttura. La natura e l’entità dei
conflitti5 dipendono da una molteplicità di variazioni quali l’intensità di traffico sulle rampe, la
4 Cfr.Torrieri et alii, 1995. 5 In realtà, esistono diversi fattori che riducono, in una sezione, la capacità limite a valori inferiori legati alle
infrastruttura stradali e al traffico che le percorrono.
Per ogni fattore perturbativo, lo “Highway Capacity Manual-Manuale della Capacità delle Strade” dell’American
Association of State Highway Officials (AASHO) prevede dei coefficienti di riduzione della capacità limite, variabili in
funzione dei vari fattori e della loro ponderazione.
I principali fattori di riduzione sono stati rilevati come:
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina1
1
portata veicolare a monte e a valle delle rampe, la morfologia degli svincoli e dell’autostrada
(numero di corsie, larghezza, presenza di banchine, curvatura, pendenze, distanza fra le due rampe
successive). La progettazione delle rampe è, così, indirizzata a facilitare le manovre d’immissione e
di diversione, ammorbidendo il contatto fra le componenti antagoniste del traffico. Secondo
l’Highway Capacity Manual-HCM (Highway Research Board; Ferrari, Giannini, 1980) il flusso
sulla rampa d’ingresso in autostrada induce effetti sulla distribuzione tra le corsie del flusso di
traffico principale su un tratto di circa 150 metri a monte e 750 a valle (aree critiche), mentre una di
uscita avrebbe un raggio di influenza di 750 a monte e 150 a valle.
5. L’analisi modellata del traffico
Sin dalle origini dello studio fenomenico, a metà degli anni ’50, molti studiosi cercarono di
stabilire, attraverso la costruzione di modelli matematici, quale fossero i migliori e meno costosi
pacchetti di analisi da elaborare attraverso i computer dell’epoca, per la migliore definizione del
traffico e della congestione (auto)stradale.
Furono due gli approcci principali individuati: il primo approccio, detto microscopico, modella
assieme, per ciascun veicolo, le interazioni con altri veicoli e le caratteristiche biopsicografiche del
conducente.
Il secondo approccio, detto macroscopico, utilizza le leggi fisiche della fluidodinamica,
ipotizzando la strada come fosse un tubo adiabatico nel quale ogni veicolo rappresenta una
componente di un flusso liquido incomprimibile, a viscosità controllata.
Il primo approccio determina una certa complessità computazionale, per cui è preferibile, in termini
di costo, per universi di popolazione veicolare abbastanza contenuti; diversamente, l’approccio di
tipo macroscopico è indicato per universi veicolari estesi, che necessitano di semplificazione.
Entrambi conducono, sperimentalmente, nella medesima direzione, anche se la percentuale di
rumore nelle misurazioni (per rallentamenti da cantieri, congestione da traffico, fermate da
incidente) colpisce maggiormente il modello macroscopico, creando, talvolta, severi errori nelle
classi di misurazione veicolare, impedendone, quindi, l’assegnazione corretta. A tal fine sono
necessari dei campionamenti particolarmente raffinati e si ricorre alla stazionarietà come
condizione di analisi.
A. Approccio Microscopico
L’analisi con approccio microscopico, abbiamo detto, segue le leggi della meccanica che vengono
applicate a ogni singolo elemento che partecipa all’intero fenomeno. Il modello microscopico
Per la capacità dell’infrastruttura
larghezza della corsia
presenza di ostacoli laterali a distanza inferiore a 1,83 m
presenza di banchine e relativa larghezza
pendenza longitudinale
stato della pavimentazione
visibilità
Per il traffico
percentuale di veicoli commerciali
percentuale di autobus
presenza di auto in sosta
presenza di flussi pedonali
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina1
2
descrive la dinamica di ogni singolo veicolo analizzando le intenzioni e il processo decisionale di
ciascun conducente e le interazioni fra più veicoli in un flusso ininterrotto.
Di massima, i modelli microscopici si possono dividere in due sottoclassi distinte. La prima
sottoclasse, conosciuta come follow the leader models, di moto longitudinale, descrive la
condizione di ciascun veicolo inseguitore che deve mantenere la distanza di sicurezza dal veicolo
che sta davanti in funzione della velocità relativa tra i due. Il secondo approccio descrive ogni
veicolo con una propria velocità indipendente da quella degli altri veicoli: il veicolo precedente
influenza la velocità del veicolo seguente in funzione della distanza relativa di entrambi.
Attualmente, l’approccio più utilizzato dai ricercatori risulta essere proprio il follow the leader
models, in quanto esso sembra fornire una risposta maggiomente realistica rispetto all’elaborazione
sperimentale.
I modelli per la simulazione del traffico attraverso l’approccio microscopico consentono, quindi, la
determinazione della posizione, della velocità e dell’accelerazione dei veicoli singoli o di un
gruppo di essi.
Nel suo aspetto metodologico, la simulazione di tali sistemi comprende la sommatoria dei
comportamenti di ogni singolo veicolo, in relazione ai veicoli con i quali condivide il tratto
(auto)stradale, secondo il principio della funzione stimolo-reazione allo stimolo. L’adattività ai
condizionamenti individuali indotti dall’ambiente esterno, condizionamenti, secondo i quali ogni
conducente di veicolo, che si trovi dentro una corrente/plotone veicolare, produrrà delle
accelerazioni o decelerazioni, a un tempo t + T, correlate secondo la propria sensibilità biopsichica
reattiva agli stimoli ricevuti dall’ambiente circostante al tempo t, ponendo T come tempo
psicotecnico di reazione, è data dalla relazione:
Secondo l’equazione oraria del moto, per ogni veicolo in movimento sulla strada, la posizione
spaziale al tempo t + Δt (che si succede al tempo t), dipende sia dalla posizione spaziale, che dalla
velocità già sostenuta dallo stesso veicolo al tempo t.
Invece, la velocità al tempo t + Δt è funzione delle sollecitazioni al tempo t che vengono meglio
rappresentate mediante i modelli microscopici denominati Car Following e Lane Change.
1. Car Following
Figura 3. Follow the leader rappresentazione
Per tale approccio metodologico, ogni veicolo mantiene una distanza di sicurezza dal veicolo che
sta davanti che è funzione della velocità relativa fra i due veicoli (secondo le norme sulle distanze di
sicurezza del codice stradale).
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina1
3
Secondo Newell (2002), il moto dei veicoli su un tronco può essere modellizzato semplicemente
traslando la traiettoria del veicolo leader e i modelli appartenenti a questa categoria agiscono
direttamente sulla posizione dei veicoli piuttosto che sulla loro velocità o accelerazione (che
introdurrebbero dei lag nell’output). Vengono chiamati modelli di ordine inferiore (lower-order).
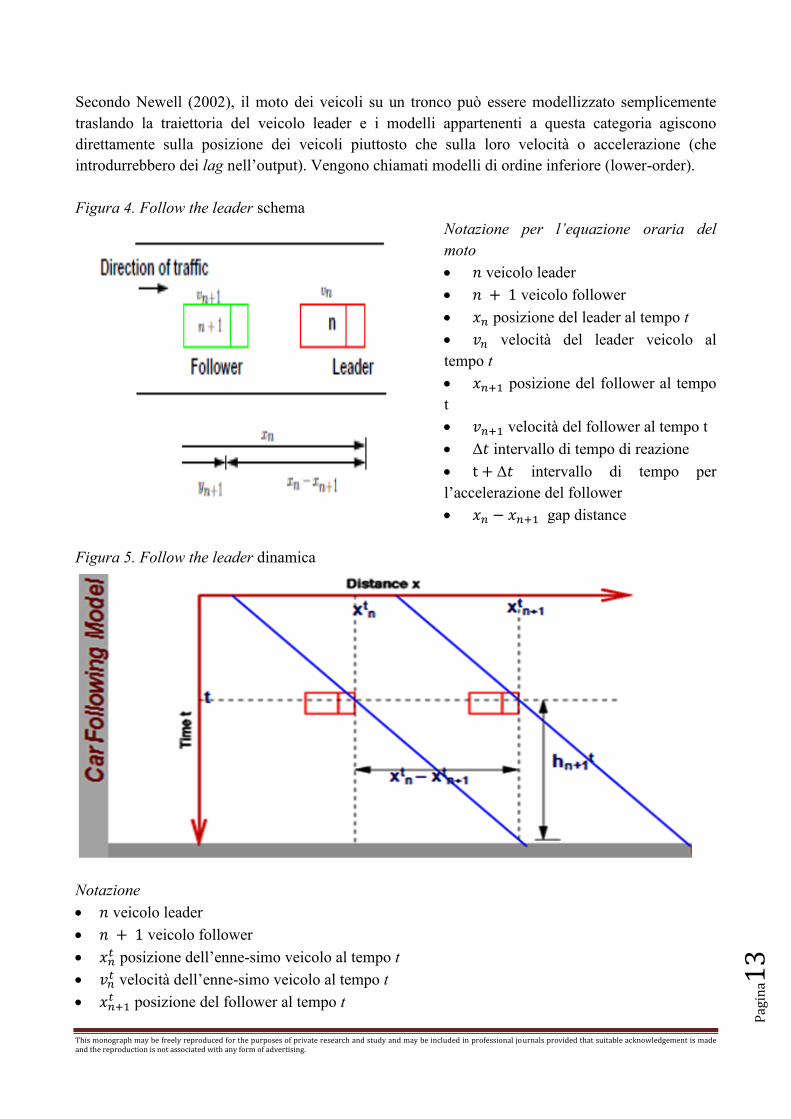
Figura 4. Follow the leader schema
Notazione per l’equazione oraria del
moto
veicolo leader
veicolo follower
posizione del leader al tempo t
velocità del leader veicolo al
tempo t
posizione del follower al tempo
t
velocità del follower al tempo t
intervallo di tempo di reazione
intervallo di tempo per
l’accelerazione del follower
gap distance
Figura 5. Follow the leader dinamica
Notazione
veicolo leader
veicolo follower
posizione dell’enne-simo veicolo al tempo t
velocità dell’enne-simo veicolo al tempo t
posizione del follower al tempo t
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina1
4
velocità del follower al tempo t
intervallo di tempo per rimpiazzo
accelerazione dell’enne-simo veicolo al tempo t
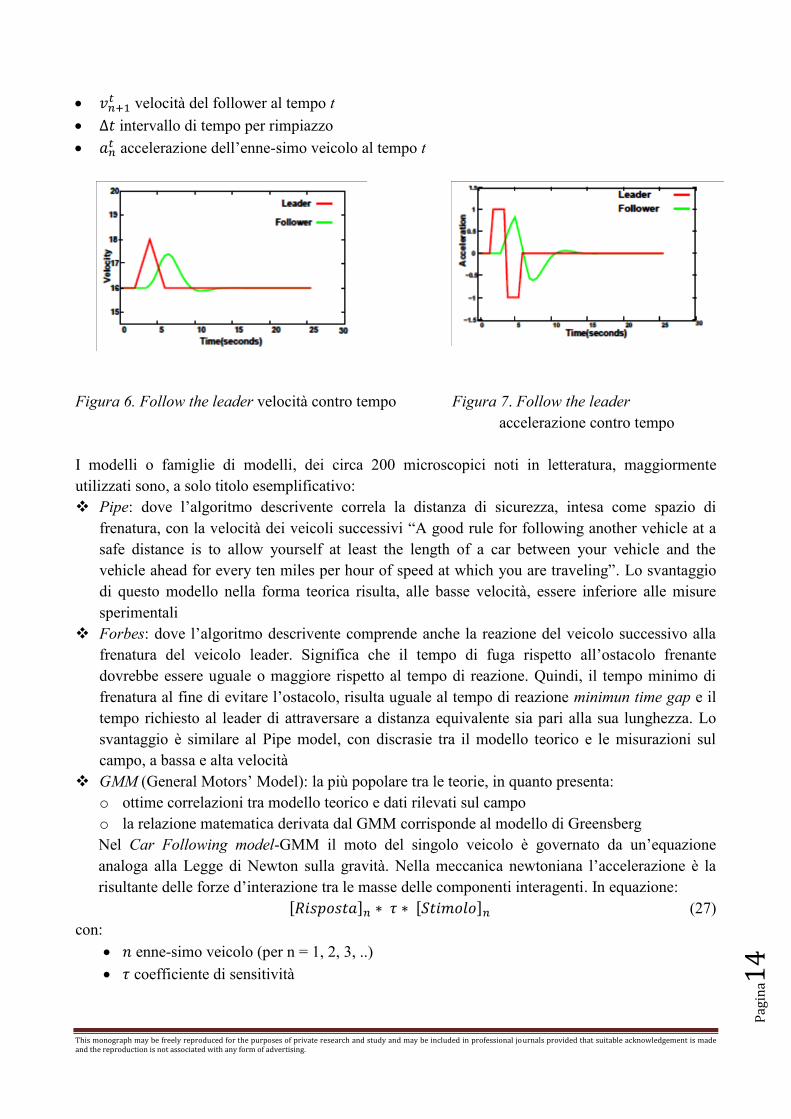
Figura 6. Follow the leader velocità contro tempo Figura 7. Follow the leader
accelerazione contro tempo
I modelli o famiglie di modelli, dei circa 200 microscopici noti in letteratura, maggiormente
utilizzati sono, a solo titolo esemplificativo:
Pipe: dove l’algoritmo descrivente correla la distanza di sicurezza, intesa come spazio di
frenatura, con la velocità dei veicoli successivi “A good rule for following another vehicle at a
safe distance is to allow yourself at least the length of a car between your vehicle and the
vehicle ahead for every ten miles per hour of speed at which you are traveling”. Lo svantaggio
di questo modello nella forma teorica risulta, alle basse velocità, essere inferiore alle misure
sperimentali
Forbes: dove l’algoritmo descrivente comprende anche la reazione del veicolo successivo alla
frenatura del veicolo leader. Significa che il tempo di fuga rispetto all’ostacolo frenante
dovrebbe essere uguale o maggiore rispetto al tempo di reazione. Quindi, il tempo minimo di
frenatura al fine di evitare l’ostacolo, risulta uguale al tempo di reazione minimun time gap e il
tempo richiesto al leader di attraversare a distanza equivalente sia pari alla sua lunghezza. Lo
svantaggio è similare al Pipe model, con discrasie tra il modello teorico e le misurazioni sul
campo, a bassa e alta velocità
GMM (General Motors’ Model): la più popolare tra le teorie, in quanto presenta:
o ottime correlazioni tra modello teorico e dati rilevati sul campo
o la relazione matematica derivata dal GMM corrisponde al modello di Greensberg
Nel Car Following model-GMM il moto del singolo veicolo è governato da un’equazione
analoga alla Legge di Newton sulla gravità. Nella meccanica newtoniana l’accelerazione è la
risultante delle forze d’interazione tra le masse delle componenti interagenti. In equazione:
(27)
con:
enne-simo veicolo (per n = 1, 2, 3, ..)
coefficiente di sensitività

This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina1
5
Ciascun conducente può rispondere alle circostanti condizioni di traffico solamente accelerando o
decelerando il proprio veicolo. Lo stimolo può essere composto da velocità del veicolo, velocità
relative, distanza tenuta dai veicoli, ecc., pertanto la funzione viene rappresentata come:
(28)
con:
funzione stimolo dipendente dalla velocità del veicolo corrente, relativo a posizione
e velocità con il veicolo frontale
Il GMM pone due assiomi a fondamento teorico:
più alta è la velocità del veicolo, più alto dovrà essere lo spazio di frenatura
il veicolo follower dev’essere omotachico con il leader
Al proposito, dati:
è la gap distance per veicoli
distanza di sicurezza
velocità del leader
velocità del follower
la gap distance richiesta sarà:
(29)
con:
coefficiente di sensitività
La (29) si può scrivere anche come:
(30)
E differenziando rispetto al tempo:
(31)
(32)
Il modello GM contempla una sensitività generale del tipo:
(33)
con:
esponente della distanza di attestazione {+4;+1}
esponente della velocità {-2;+2}
coefficiente di sensitività
accelerazione del follower
Introducendo:

This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina1
6
tempo di reazione
tempo di adattamento
L’equazione generale del GMM risulta, in accordo con le leggi sul moto di Newton:
(34)
(35)
(36)
Optimal velocity model OVM: proposto da Bando et alii (1995), dove la ricerca dell’ottimo di
velocità, corrisponde al posizionamento omotachico tra i due veicoli, continuamente ricercato
attraverso lo spazio di frenatura, sperato come sufficiente per evitare l’ostacolo di un’ipotetico
scontro fronto-laterale di corsia. Ogni conducente risponde ad uno stimolo proveniente dal
veicolo che lo precede e deve, quindi, controllare l’accelerazione in modo da mantenere una
velocità desiderata “sicura”, concordemente con il moto veicolare del leader.
La formulazione dell’algoritmo, la cui espressione matematica è un’equazione differenziale del
primo ordine, parte dall’assunto che la velocità desiderata dipende dalla distanza attestata
dall’enne-simo veicolo , cioè:
(37)
con:
velocità desiderata dell’enne-simo veicolo
funzione di velocità ottimale
funzione di distanza istantanea
Dalla (37) si ricava l’accelerazione (reattività) del veicolo al tempo t data da:
(38)
con:
coefficiente di sensitività
Quando il distanziamento temporale tra i veicoli si riduce, la velocità deve diminuire in ragione da
evitare possibili collisioni con il veicolo leader. Pertanto, la funzione
deve presentarsi come
monotona crescente e deve porsi limitata superiormente. Viene raggiunta la velocità
massima desiderata al tendere a infinito del distanziamento spaziale.
In breve, la strategia dell’enne-simo veicolo sarà quella di provare a mantenere una velocità di
sicurezza che dipende dalla propria posizione relativa, piuttosto che dalla propria velocità effettiva.
La funzione più corrispondente alla velocità “legale” degli autoveicoli che consente di simulare un
comportamento del conducente che accelera o frena in maniera graduale, riproducendo
spontaneamente i fenomeni di congestione, è data da:

This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina1
7
(39)
Intelligent Drive Model: proposto da Treiber et alii (2000, 2006, 2010). Esso è un
perfezionamento del modello di Bando, notando che il reciproco del coefficiente di sensitività è
dello stesso ordine degli usuali tempi di reazione dei conducenti, in quanto ciò è dovuto al fatto
che le velocità intra-veicolari, quando vengono trascurate dal modello, producono tassi di
accelerazione e decelerazione uguali in modulo e simmetriche nel verso al pari della velocità del
veicolo rispetto a quella di equilibrio, anch’essa uguale e opposta.
Nell’IDM, l’accelerazione del veicolo al tempo t è una funzione continua di velocità e
distanziamento veicolare-differenza intraveicolare rispetto al leader. È data da:
(40)
dove:
accelerazione massima
velocità desiderata del veicolo generico al tempo t
“characterizes how the acceleration decreases with velocity ( =1 corresponds to a linear
decreases while denotes a costant acceleration”6
distanziamento desiderato dal conducente, funzione e della velocità del follower e
della differenza del distanziamento cinetico intraveicolare
free road acceleration strategy = reattività del generico veicolo in guida
libera
deceleration strategy = reattività del generico veicolo con veicolo
leader lento
con:
(41)
e:
minimun dìstance (for low velocities only)
velocity-dependent distance at t-time, corresponds to following leading vehicle with a
constant desired time-gap T
dynamic contribution (active only in non-stationary traffic corresponding to
situations in which
This last contribution implements an ‘intelligent’ driving behaviour that, in normal situations, limits
braking decelerations to the comfortable deceleration b. In critical situations, however, the IDM
deceleration becomes significantly higher, making the IDM collision free (Treiber et al. 2000). The
IDM parameters
, T, , a and b have a reasonable interpretation, are known to be relevant,
are empirically measurable and have realistic values (Kesting, Treiber, 2006; 2010)7.
6 cfr. Kesting A., Treiber M., Helbing D. (2006; 2010), Enhanced intelligent driver model to access the impact of
driving strategies on traffic capacity, Physica A 360, 71–88. 7 Ibidem.
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina1
8
Chandler: di tipo monoregime, cioè di semplice formulazione lineare, descrive la risposta di un
veicolo come direttamente proporzionale alla velocità relativa tra il veicolo follower e il veicolo
leader (stimolo) semplificato nell’equazione:
(42)
dove:
coefficiente di sensitività
accelerazione del veicolo generico
tempo di reazione
velocità dell’enne-simo veicolo
Il modello di Chandler trova limite nella mancata correlazione tra lo stimolo e il distanziamento
veicolare. Infatti, a distanziamenti contenuti il modello diventa non corrispondente alla realtà.
In caso di un veicolo leader che marci a velocità maggiore che il veicolo follower, il Chandler
model produce un’accelerazione di segno positivo.
Helly (1959) introdusse una variazione al modello di Chandler, inserendo un secondo stimolo, che
fosse funzione della differenza tra il distanziamento veicolare e quello desiderato dal follower, che
nel tempo è divenuto quello enunciato nella (39).
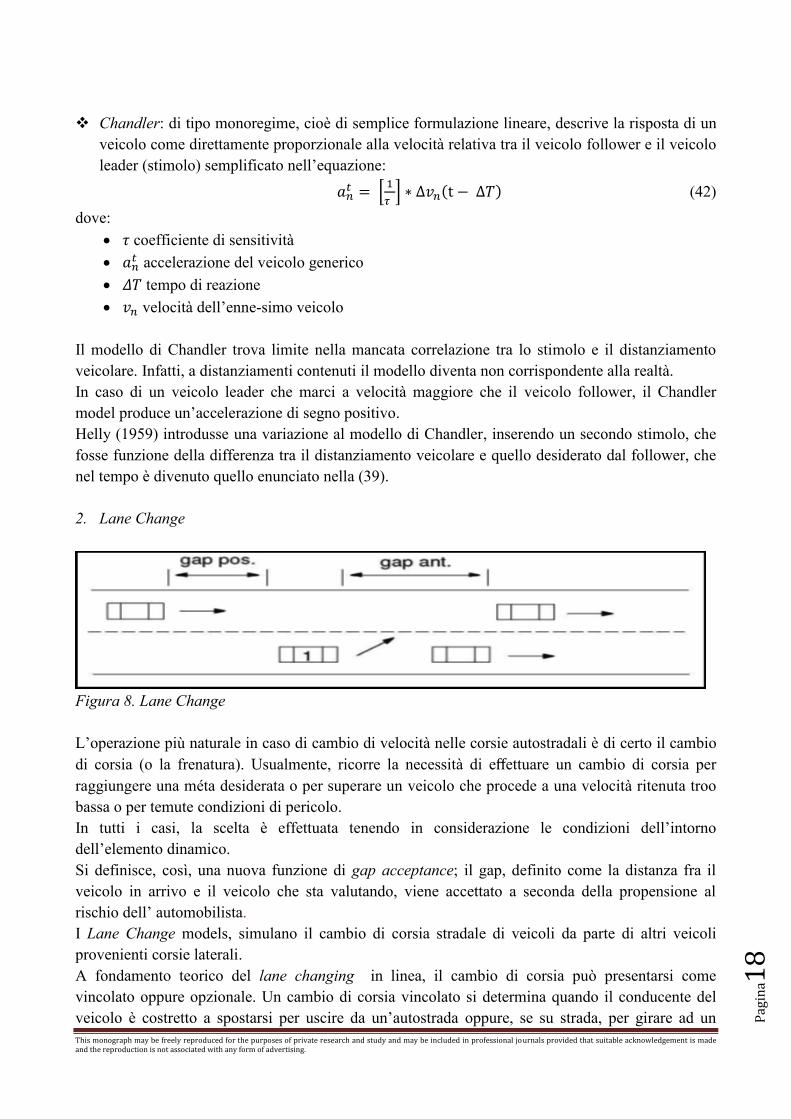
2. Lane Change
Figura 8. Lane Change
L’operazione più naturale in caso di cambio di velocità nelle corsie autostradali è di certo il cambio
di corsia (o la frenatura). Usualmente, ricorre la necessità di effettuare un cambio di corsia per
raggiungere una méta desiderata o per superare un veicolo che procede a una velocità ritenuta troo
bassa o per temute condizioni di pericolo.
In tutti i casi, la scelta è effettuata tenendo in considerazione le condizioni dell’intorno
dell’elemento dinamico.
Si definisce, così, una nuova funzione di gap acceptance; il gap, definito come la distanza fra il
veicolo in arrivo e il veicolo che sta valutando, viene accettato a seconda della propensione al
rischio dell’ automobilista.
I Lane Change models, simulano il cambio di corsia stradale di veicoli da parte di altri veicoli
provenienti corsie laterali.
A fondamento teorico del lane changing in linea, il cambio di corsia può presentarsi come
vincolato oppure opzionale. Un cambio di corsia vincolato si determina quando il conducente del
veicolo è costretto a spostarsi per uscire da un’autostrada oppure, se su strada, per girare ad un
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina1
9
incrocio, mentre si osserva un cambio di corsia opzionale, quando il conducente ritiene che l’altra
corsia soddisfi maggiormente le sue attuali necessità di spazio o di velocità.
I modelli di lane changing si basano, così, sull’osservazione e la valutazione di queste due
grandezze.
La figura (8) rappresenta una situazione di cambio di corsia determinato da un processo di scelta di
sorpasso operabile da parte del conducente del veicolo 1 oppure che questo debba, per motivi di
sicurezza, rimanere nella sua corsia.
Il punto di debolezza, per questi sistemi dinamici, rimane quello di riuscire a riprodurre un
comportamento realistico per un universo sufficiente di conducenti, in quanto ben si sa che le
persone conducono i loro veicoli in modo completamente diverso, le une dalle altre.
Partendo dal Car Following e integrandolo con il Lane Change e una funzione di gap acceptance è
possibile ottenere modelli di traffico multicorsia e di qualsiasi tipo di intersezione stradale e
autostradale. Uno dei modelli di lane changing deterministico fra i più usati è quello sviluppato da
Gis (Gis P.G., 1981).
3. I modelli psico-fisici o cognitivi
Il precursore del modelli psico-fisici o cognitivi si deve a Michaels (1963), il quale teorizzò la
capacità di di percepire l’avvicinamento ad un veicolo da parte dei conducenti, proporzionato alla
variazione delle sue dimensioni apparenti, percependo la velocità relativa attraverso delle
variazioni dell’angolo di percezione/visione Θ (la cd. “coda dell’occhio”) sotteso al veicolo che li
precede.
Inizialmente, la velocità relativa diminuisce fino a un primo valore di soglia e i conducenti
iniziano, dopo un tempo di ritardo lag, a decelerare. Tale decelerazione continua senza soluzioni di
continuità, finché la velocità relativa diviene nulla e il veicolo follower raggiunge un
distanziamento desiderabile.
4. Modelli misti
Alcuni modelli microscopici come il modello di Leeds (Wang et alii, 2005), possono essere
considerati appartenenti ad entrambi gli approcci decritti in precedenza. Essi combinano, infatti, sia
le proprietà dell’approccio ingegneristico che di quello psico-fisiologico.
B. Approccio Macroscopico
L’analisi viene focalizzata sul comportamento dell’insieme degli elementi che partecipano al
fenomeno.
I modelli di tipo macroscopico possono venire classificati in funzione alla loro rappresentazione
dello spaziale, assumendo il tempo in forma continua e non discreta (Cascetta, 2006).
Mentre i modelli a spazio continuo richiedono variabili definite in qualsiasi punto dello spazio, i
modelli a spazio discreto sono più prossimi ai modelli statici: le variabili di base che influenzano la
prestazione del ramo (densità e velocità) sono definite a livello dell’intero ramo e la loro soluzione
richiede una discretizzazione spazio/temporale.
I modelli macroscopici, per descrivere una situazione di traffico, usano variabili aggregate, cioè
variabili che contengano informazioni medie di grandezza per congrui di veicoli. Vennero
sviluppati in analogia con le leggi della dinamica dei gas e dei fluidi.

This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina2
0
Entrando nel merito, nei modelli macroscopici si considerano correnti/plotoni di veicoli come
sezioni di flusso di un fluido incomprimibile. In queste condizioni, l’informazione sul singolo
veicolo viene perduta e si descrive l’intero sistema. Questo processo abbisogna della necessità di
definire le opportune variabili di sistema che esprimano un comportamento standard tenuto dai
veicoli stradali.
Nel modello Lighthill-Whitham-Richards (LWR) l’approccio macroscopico, è costituito sulla
conservazione dei veicoli in sezione ed è descritto dall’equazione seguente, dove con si indica
la densità numerica di veicoli (numero di veicoli/unità di lunghezza di sezione):
(43)
dove:
f valore del flusso veicolare funzione della densità
per (44)
In generale, la relazione f = prende il nome di diagramma fondamentale del modello di
traffico. La formulazione più ristretta del modello LWR è che la velocità media v dei veicoli sia
solamente funzione della densità , il ché pone la velocità v come funzione decrescente della
densità.
5. Modelli multicorsia e multipopolazione
Nei modelli multicorsia vengono considerate le variabili macroscopiche come la densità delle auto
e la velocità media su ogni singola corsia, nel caso di strade con N corsie.
In una (auto)strada a corsie plurime, si osservano usualmente comportamenti di traffico differenti in
relazione alla densità di traffico: con traffico basso, i veicoli possono cambiare corsie ed effettuare
sorpassi a velocità media elevata. In una situazione di traffico elevato la velocità media risulta,
invece, più bassa.
I modelli multipopolazione, che prevedono il comportamento di un gruppo eterogeneo di
conducenti (Benzoni-Gavage, Colombo, 2003), vengono spesso descritti come un’appendice
naturale del modello Lighthill-Whitham-Richards:
(45)
con:
è la velocità media relativa all’i-esima classe di conducenti che percorre il tratto di
(auto)strada e dipendente da tutte le velocità medie omotachiche dei veicoli per le corsie
ossia, con:
(46)
come generalizzazione della (2) di Greenshield
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina2
1
è la densità relativa all’i-esima classe di popolazione di conducenti che percorre il tratto
di (auto)strada8
6. Approccio spazio-temporale delle distanze di sicurezza autostradali
Spazio e Tempo di frenatura e di arresto – approccio fluidodinamico
Nella presentazione dei vari modelli di studio del traffico, al fine di evidenziare e definire
compiutamente i fattori negativi come l’incidentalità e la congestione, il conducente rimane ancora
l’arbitro nel giudicare quale sia il proprio comportamento più profittevole in termini di sicurezza e
di attuarlo in riferimento a quello degli altri conducenti. Il comportamento dei conducenti è
essenzialmente legato ai condizionamenti cui si è sopra accennato.
Secondo il criterio della marcia a vista, ogni conducente adatta la propria velocità in modo da poter
far fronte alla situazione di pericolo data principalmente dallo scontro fronto-laterale, di origine
longitudinale e/o trasversale, laddove l’ostacolo originato da un veicolo che si muove
parallelamente alla traiettoria medesima, è presente sulla traiettoria e l’ostacolo che interferisce con
la traiettoria proviene da una direzione ad essa trasversale.
Il codice della strada, in Italia, interviene imponendo delle restrizioni che servono a ridurre il
numero o la pericolosità delle situazioni di conflitto.
Resta sempre affidata al conducente sia la verifica delle effettive condizioni di sicurezza trasversale
che della sicurezza longitudinale rispetto alla propria traiettoria.
In definitiva, il conducente è vincolato dalla necessità di coesistenza in sicurezza delle tre
componenti del sistema di trasporto: strada, veicoli ed ambiente, in cui la sicurezza della marcia, è
legata perciò all’arbitrio dei singoli sovrapposto ad una base comportamentale comune.
Di seguito, verrà riportata una tavola in cui viene calcolata la distanza di sicurezza, partendo dai
parametri che determinano lo spazio di arresto, il tempo di reazione dell’individuo alla guida del
veicolo e il tempo di arresto (Siuhi, Kaseko, 2010) in condizioni di legalità prevista dal Codice
della Strada9 italiano.
Per affrontare il problema della valutazione economica della redditività in sezione/tratta
autostradale, si rende necessaria la scelta della modellazione maggiormente rispondente ai criteri di
efficienza descrittiva e di economicità procedurale.
Dall’osservazione diretta e videoripresa del fenomeno del traffico autostradale sulle autostrade A4
da Brescia Est a Padova Ovest e A31 da Vicenza a Piovene Rocchette, nel settembre 2003,
rinforzata dall’acquisizione dei dati da spire a terra, selezioniamo, per l’introduzione del modello
8 Garavello M., Piccoli B. (2006), Traffic flow on network, Applied Math Series, vol. 1, American Institute of
Mathematical Sciences, 12, 15, 16, 17, 20, 59. 9Art.149 del Codice della Strada. Distanza di sicurezza tra veicoli.
1. Durante la marcia i veicoli devono tenere, rispetto al veicolo che precede, una distanza di sicurezza tale che sia
garantito in ogni caso l'arresto tempestivo e siano evitate collisioni con i veicoli che precedono.
Titolo V Norme di comportamento-Regolamento art. 348. (Art. 149 Cod. Strada) Distanza di sicurezza tra i veicoli.
1. La distanza di sicurezza tra due veicoli deve sempre essere commisurata alla velocità, alla prontezza dei riflessi del
conducente, alle condizioni del traffico, a quelle planoaltimetriche della strada, alle condizioni atmosferiche, al tipo e
allo stato di efficienza del veicolo, all'entità del carico, nonché ad ogni altra circostanza influente.
2. La distanza di sicurezza deve essere almeno uguale allo spazio percorso durante il tempo che passa tra la prima
percezione di un pericolo e l'inizio della frenata.
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina2
2
economico di redditività più efficiente, l’approccio dei già visti Modelli multicorsia e
multipopolazione, per i seguenti motivi:
1. il traffico autostradale nelle giornate centrali della settimana per stagionalità mitigata, per ore
centrali della giornata, appare a rappresentazione stazionaria per serie storiche
2. il traffico nelle corsie10
autostradali è assimilabile, nelle condizioni di imperturbabilità, in
assenza di viscosità11
, al flusso dinamico incomprimibile (come le distanze di sicurezza
veicolari) di un fluido contenuto in una condotta.
Si consideri, al proposito, un’ampia scala spaziale-temporale, come risultante dall’osservazione del
fenomeno di traffico o congestione effettuata da un punto lontano, in modo tale da assimilare i
veicoli stradali a microparticelle indistinte non molecolari e considerando la densità come una
distribuzione continua, il ché non contrasta con una distanza intraparticellare simile alla distanza di
sicurezza veicolare.
Inoltre, al pari della continuità distributiva nella fluidodinamica, è necessario assumere anche la
conservazione del numero di auto in una sezione/tratta autostradale senza uscite né entrate,
giungendo, così, a una legge di conservazione matematica assimilabile alla legge di conservazione
fluidodinamica: in questa condizione, quindi, si può affermare che il numero di auto si conserva e
se c’è una quantità che si conserva, allora si parla di legge di conservazione.
Quando il moto è stazionario, la velocità v in ogni punto dello spazio del flusso dinamico
incomprimibile è costante nel tempo, cioè ogni veicolo-particella che transita per un qualsiasi
punto della condotta lo fa sempre con la stessa velocità in modulo, direzione e verso.
Così, trattando il fenomeno dal punto di vista euleriano, anziché descrivere la cronologia di ogni
singola particella di fluido-traffico, si valutano la densità, la pressione-distanza di sicurezza e la
velocità veicolare-particellare puntiformi in ogni punto dello spazio occupato in ogni istante
successivo e si fa riferimento al cosiddetto volume di controllo, cioè la regione dello spazio che in
istanti diversi viene occupata da veicoli-particelle puntiformi diverse.
È possibile, alla fine, affermare che per il moto stazionario12 esiste una sola linea di flusso per ogni
punto del fluido veicolare e che l’insieme delle linee di flusso veicolare è fisso nel tempo13
. Le
linee di flusso veicolare, ovvero le traiettorie che seguono i veicoli-particelle puntiformi, possono
anche non essere rettilinee, ma rimarranno sempre costanti nel tempo14
.
10 Duderstadt J.S., Martin W.R. (1979), Transport theory, cap. 4: “The derivation of continuum description from
transport equations”,.New York, Wiley-Interscience Publications. 11
L'assenza di viscosità significa che non vi sono azioni tangenziali fra elementi fluidi a contatto. 12
Si dice in flusso stazionario, quando la velocità del fluido pur potendo variare da punto a punto, rimane costante nel
tempo in ciascun punto. 13
J. Lighthill, G. Whitham e P. Richards, mutuarono il loro metodo LWR, dalle equazioni di derivate parziali note
come equazioni di Eulero o di Navier-Stokes che descrivono il flusso d’acqua, esprimendo la conservazione della
massa, del momento e dell’energia assimilabili alla dinamica del flusso del traffico stradale . 14
La risoluzione di un problema fluidodinamico comporta generalmente la risoluzione di complesse equazioni per il
calcolo di diverse proprietà del fluido, in funzione dello spazio e del tempo. Per un flusso stazionario è verificata la
conservazione della massa e da essa ricaviamo l'equazione di continuità:
Sia dato un tubo di flusso di sezioni ed entro il quale le densità siano e le velocità siano , la massa
non può variare attraversando il tubo di flusso nella frazione di tempo dt, cioè:
(A.13)
Dunque:
(A.14)
che è l'equazione di continuità.
Effettuando il prodotto tensoriale di una equazione del trasporto di tipo lineare come quella di Boltzmann, in forma
euleriana:

This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina2
3
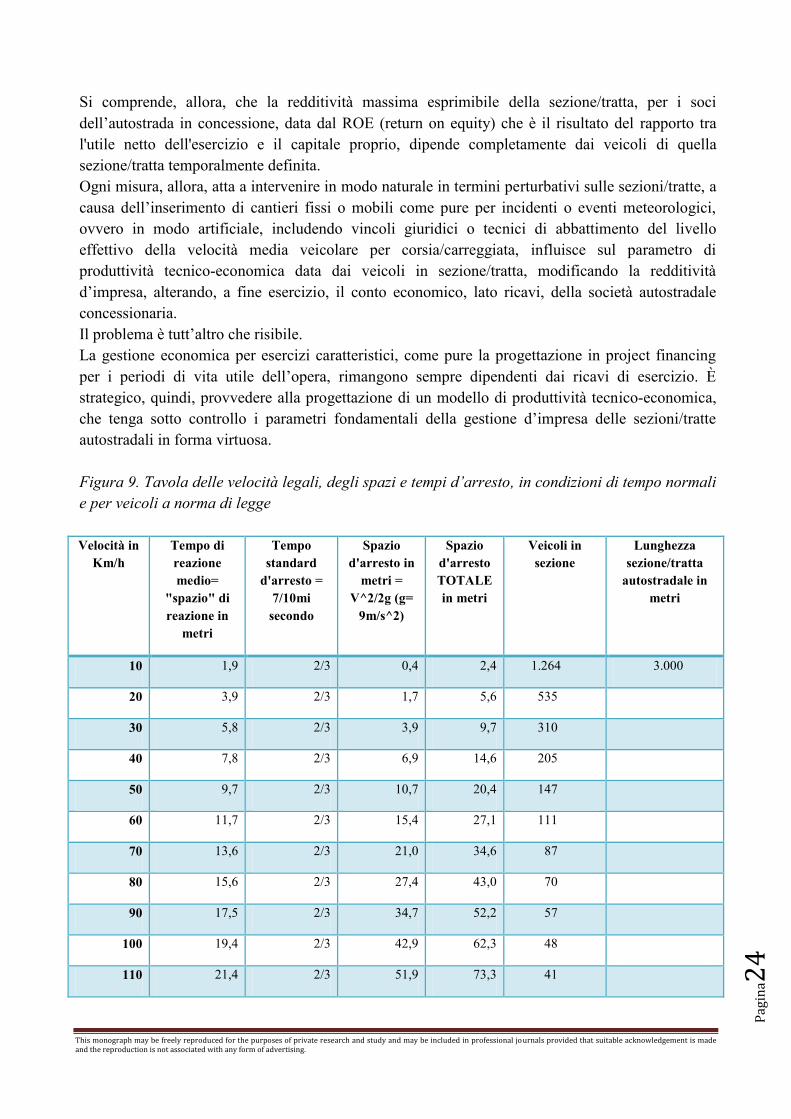
Nella rappresentazione tavolare di figura 9 verifichiamo che, alla velocità massima di codice
autostradale (normalmente) prevista in Italia di 130 km/h, il contenuto di veicoli in sezione/tratta,
nel pieno rispetto delle distanze di sicurezza, che costituiscono la condizione minima teorica di
numerosità veicolare puntiforme, è di 31 veicoli puntiformi e questo per una sezione/tratta, a
riempimento veicolare diffuso, omotachico, lunga 3.000 metri lineari convenzionali.
(A.15)
per la velocità (microscopica) del sistema, ed integrandola nel momento coniugato in modo che vi rimanga solo la
dipendenza dalla coordinata coniugata:
(A.16)
si verifica che il vettore collisionale è nullo, se vale la conservazione della quantità di moto in ogni collisione binaria:
(A.17)
Quindi, in base alla definizione della densità nello spazio delle configurazioni come:
(A.18)
e dell'operatore media integrale nello spazio dei momenti "< >":
(A.19)
tenendo conto della potenza generalizzata definibile come:
(A.20)
si può riesprimere il vettore dinamico definendo il vettore campo medio:
(A.21)
si può riesprimere il tensore cinetico definendo il tensore degli sforzi interni:
(A.22)
Otterremo allora l'equazione di bilancio della quantità di moto in forma differenziale:
(A.23)
Si noti che l'equazione coinvolge la variabile velocità media nello spazio delle configurazioni, detta usualmente velocità
macroscopica, in cui l'equazione risulta iperbolica, applicando la regola di Leibnitz:
(A.24)
Si indicherà ora la derivata nella coordinata generalizzata sarà indicata, conformemente alla consuetudine
fluidodinamica, col simbolo nabla:
(A.25)
Quindi, in forma euleriana, applicando il teorema della divergenza, e il teorema di Reynolds all'integrale di quantità di
moto:
(A.26)
dove il volume e la sua frontiera sono considerabili costanti del tempo. Si definiscono, infine, le forze di volume e di
contatto:
(A.27)
se si riassumono i termini di forza:
(A.28)
La legge di bilancio della quantità di moto per un corpo continuo in un sistema di riferimento euleriano può essere
quindi enunciata come segue: “la variazione, nel tempo, della quantità di moto in un volume di controllo, sommata al
flusso netto di quantità di moto attraverso la superficie che lo delimita, uguaglia la risultante delle forze esterne agenti al
suo interno” (da: http://it.wikipedia.org/wiki/Fluidodinamica, 2013).
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina2
4
Si comprende, allora, che la redditività massima esprimibile della sezione/tratta, per i soci
dell’autostrada in concessione, data dal ROE (return on equity) che è il risultato del rapporto tra
l'utile netto dell'esercizio e il capitale proprio, dipende completamente dai veicoli di quella
sezione/tratta temporalmente definita.
Ogni misura, allora, atta a intervenire in modo naturale in termini perturbativi sulle sezioni/tratte, a
causa dell’inserimento di cantieri fissi o mobili come pure per incidenti o eventi meteorologici,
ovvero in modo artificiale, includendo vincoli giuridici o tecnici di abbattimento del livello
effettivo della velocità media veicolare per corsia/carreggiata, influisce sul parametro di
produttività tecnico-economica data dai veicoli in sezione/tratta, modificando la redditività
d’impresa, alterando, a fine esercizio, il conto economico, lato ricavi, della società autostradale
concessionaria.
Il problema è tutt’altro che risibile.
La gestione economica per esercizi caratteristici, come pure la progettazione in project financing
per i periodi di vita utile dell’opera, rimangono sempre dipendenti dai ricavi di esercizio. È
strategico, quindi, provvedere alla progettazione di un modello di produttività tecnico-economica,
che tenga sotto controllo i parametri fondamentali della gestione d’impresa delle sezioni/tratte
autostradali in forma virtuosa.
Figura 9. Tavola delle velocità legali, degli spazi e tempi d’arresto, in condizioni di tempo normali
e per veicoli a norma di legge
Velocità in
Km/h
Tempo di
reazione
medio=
"spazio" di
reazione in
metri
Tempo
standard
d'arresto =
7/10mi
secondo
Spazio
d'arresto in
metri =
V^2/2g (g=
9m/s^2)
Spazio
d'arresto
TOTALE
in metri
Veicoli in
sezione
Lunghezza
sezione/tratta
autostradale in
metri
10 1,9 2/3 0,4 2,4 1.264 3.000
20 3,9 2/3 1,7 5,6 535
30 5,8 2/3 3,9 9,7 310
40 7,8 2/3 6,9 14,6 205
50 9,7 2/3 10,7 20,4 147
60 11,7 2/3 15,4 27,1 111
70 13,6 2/3 21,0 34,6 87
80 15,6 2/3 27,4 43,0 70
90 17,5 2/3 34,7 52,2 57
100 19,4 2/3 42,9 62,3 48
110 21,4 2/3 51,9 73,3 41

This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina2
5
120 23,3 2/3 61,7 85,1 35
130 25,3 2/3 72,4 97,7 31
140 27,2 2/3 84,0 111,2 27
150 29,2 2/3 96,5 125,6 24
160 31,1 2/3 109,7 140,9 21
170 33,1 2/3 123,9 156,9 19
180 35,0 2/3 138,9 173,9 17
190 36,9 2/3 154,7 191,7 16
200 38,9 2/3 171,5 210,4 14
È evidente che in condizioni di guida in sicurezza, i veicoli paganti, in plotoni/correnti a flusso
continuo nelle sezioni/tratte, per condizioni meteorologiche normali, a densità critica coincidente
con la massima velocità legale, il reddito derivante dalla produttività tecnica è quello che s’iscrive
nel conto economico dell’impresa in condizioni di ottimalità ed è il minimo compatibile con la
sopravvivenza dell’attività stessa. In pratica, se si considerano il reddito d’impresa e la gestione
delle sezioni/tratte autostradali dipendenti dalla velocità veicolare in condizioni giuridiche di
legalità, può essere che la stessa velocità costituisca un vincolo al reddito stesso.
D’altra parte, l’attrattività infrastrutturale, cioè la scelta che fa in anticipo il conducente per
l’impegno della via stradale, deriva dalla velocità massima esprimibile dal veicolo e
ipotizzabile/desiderabile dal conducente, rispetto alla stessa velocità massima esprimibile dal
veicolo sull’infrastruttura stradale alternativa (strada a scorrimento veloce, strada ordinaria, ecc.).
Parimenti al modello bimodale classico, l’espressione che definisce i conducenti dei veicoli, che
impegnino qualsiasi infrastruttura stradale/autostradale, è del tipo:
(47)
con:
K = 1,2, …. M [con M = taglio modale/classe di veicoli autostradali15
]
avendo indicato con:
la frazione di spostamenti tra l’ingresso in sezione i e l’uscita in sezione j effettuati in
modalità/classe h funzione dell’infrastruttura impegnata
una funzione composita delle caratteristiche connesse allo spostamento con lo stesso
modulo/classe di spostamento h tra l’ingresso in sezione i e l’uscita in sezione j
k si riferisce al modo di spostamento tra gli m modi alternativi
15
L'obiettivo della fase di taglio modale è quello di determinare il valore Mij km
ovvero la proporzione di spostamenti
effettuati dagli individui della k-esima classe, dalla zona d’ingresso in sezione i alla zona di uscita dalla sezione j, con il
modo di trasporto/classe di veicoli m, definito il valore Tijk. E per stimare le proporzioni Mij
km si ricorre a modelli di tipo
probabilistico e solitamente sono utilizzati, in letteratura, due tipi di modelli relativi, o ad analisi di tipo aggregato
(come i modelli di separazione), oppure relativi a strutture disaggregate.
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina2
6
è un parametro sperimentale che dipende dalle condizioni del traffico in sezione/tratta
(viscosità del sistema) e si riferisce al livello di servizio offerto dal gestore
dell’infrastruttura
il totale di spostamenti tra l’ingresso in sezione i e l’uscita in sezione j effettuati in
modalità/classe h
il totale di spostamenti tra l’ingresso in sezione i e l’uscita in sezione j effettuati in tutte
le modalità/classi veicolari
Il modello Logit bimodale classico sopra rappresentato, mostra delle interessanti proprietà, tra le
quali, in particolare:
determina la generazione di una curva ad S all’ampliarsi della forbice competitiva di una
modalità rispetto all’altra, come per le curve (empiriche) dette curve di diversione
genera, a parità di caratteristiche, la ripartizione degli spostamenti che avviene tra le due
infrastrutture, da optare, per veicoli di uguale classe, in parti uguali
qualora le caratteristiche competitive, da scegliere, del modo di spostamento
sull’infrastruttura 1 tendano a essere nettamente inferiori a quelle della modalità di
spostamento sull’infrastruttura 2 (alla 1 alternativa), tutti gli individui tendono a spostarsi
su quest’ultima, nel qual caso Pijh (In) tenderà a 1
Appare evidente che lo stato stazionario richiesto, per l’applicazione dei modelli macroscopici del
tipo LWR o multicorsia e multipopolazione, richiede grande stabilità di traffico e una visione del
fenomeno proiettata su tempi lunghi.
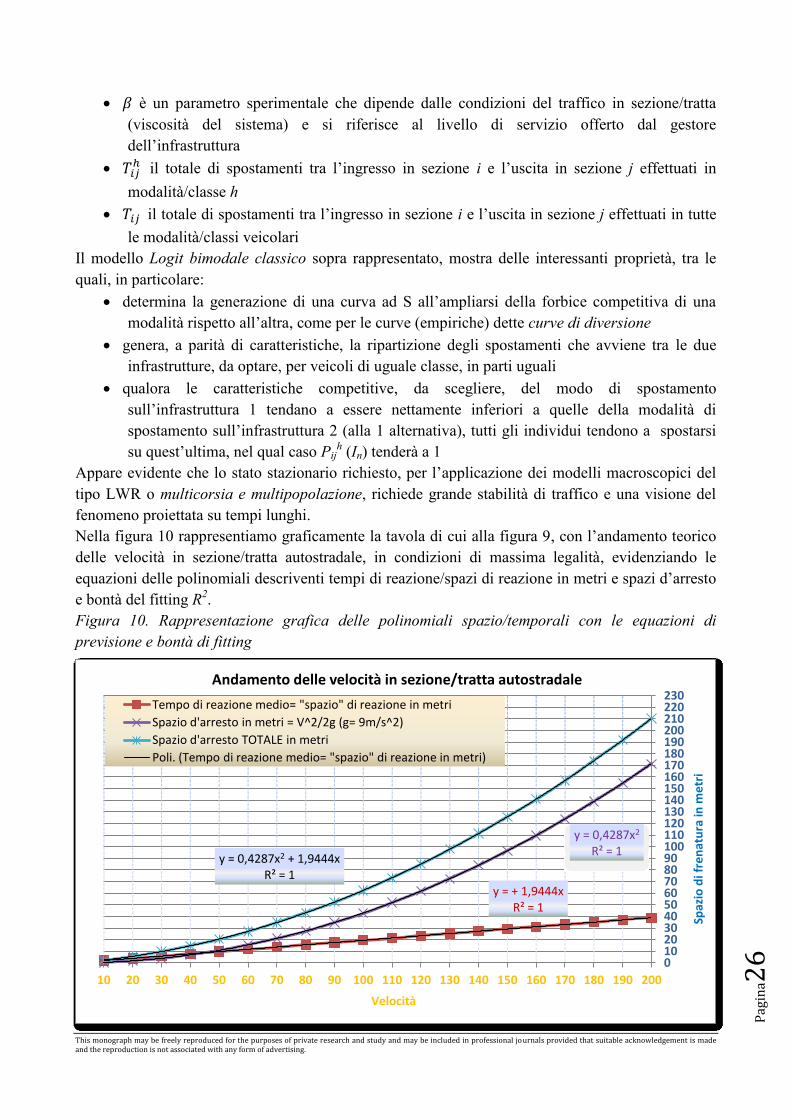
Nella figura 10 rappresentiamo graficamente la tavola di cui alla figura 9, con l’andamento teorico
delle velocità in sezione/tratta autostradale, in condizioni di massima legalità, evidenziando le
equazioni delle polinomiali descriventi tempi di reazione/spazi di reazione in metri e spazi d’arresto
e bontà del fitting R2.
Figura 10. Rappresentazione grafica delle polinomiali spazio/temporali con le equazioni di
previsione e bontà di fitting
y = + 1,9444x R² = 1
y = 0,4287x2 R² = 1
y = 0,4287x2 + 1,9444x R² = 1
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 210 220 230
10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200
Spaz
io d
i fre
nat
ura
in m
etr
i
Velocità
Andamento delle velocità in sezione/tratta autostradale
Tempo di reazione medio= "spazio" di reazione in metri
Spazio d'arresto in metri = V^2/2g (g= 9m/s^2)
Spazio d'arresto TOTALE in metri
Poli. (Tempo di reazione medio= "spazio" di reazione in metri)
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina2
7
Il grafico viene costruito in forza dei dati presenti nella tavola e mostra la rappresentazione dei dati
in equazioni, ciascuna con la propria intercetta, delle tre principali variabili:
in rosso scuro, l’equazione del “tempo di reazione/spazio di reazione” espresso in metri,
calcolato come tempo di reazione medio, e fatto corrispondere a 710mi
di secondo (il range
attualmente definito dai vari studi accademici e di settore sulle caratteristiche antropo-
biopsichiche della popolazione italiana lo fa variare da 0,45 a 1,50 sec.), la cui equazione è,
con R2 = 1:
(48)
in viola, l’equazione dello “spazio di arresto” espresso in metri (dipendente dal grado di
frenatura dei veicoli per attrito volvente delle gomme e dal grado di frenatura del manto di
usura sulle gomme, per attrito radente - e dell’elasticità del sottostante binder), con
per
, R
2 = 1:
(49)
in blu, l’equazione dello “spazio d’arresto totale spazio” espresso in metri, risultato dalla
somma delle due equazioni precedenti, con R2 = 1:
(50)
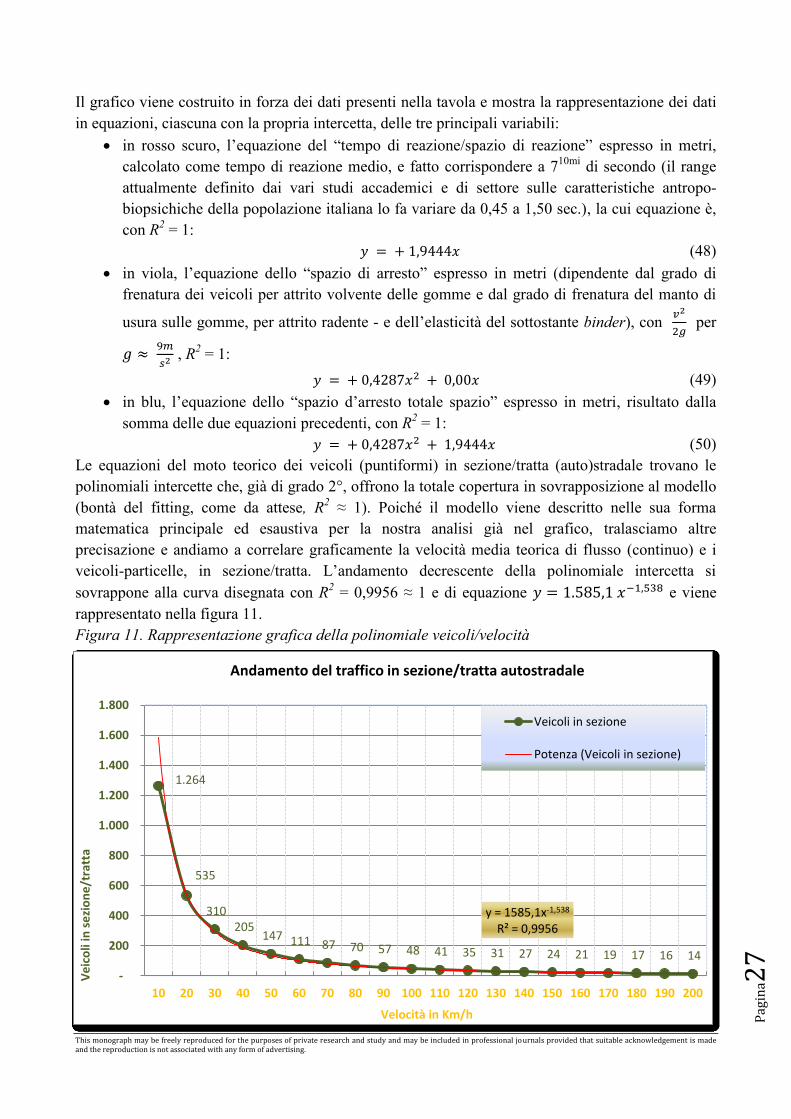
Le equazioni del moto teorico dei veicoli (puntiformi) in sezione/tratta (auto)stradale trovano le
polinomiali intercette che, già di grado 2°, offrono la totale copertura in sovrapposizione al modello
(bontà del fitting, come da attese, R2 ≈ 1). Poiché il modello viene descritto nelle sua forma
matematica principale ed esaustiva per la nostra analisi già nel grafico, tralasciamo altre
precisazione e andiamo a correlare graficamente la velocità media teorica di flusso (continuo) e i
veicoli-particelle, in sezione/tratta. L’andamento decrescente della polinomiale intercetta si
sovrappone alla curva disegnata con R2 = 0,9956 ≈ 1 e di equazione e viene
rappresentato nella figura 11.
Figura 11. Rappresentazione grafica della polinomiale veicoli/velocità
1.264
535
310 205
147 111 87 70 57 48 41 35 31 27 24 21 19 17 16 14
y = 1585,1x-1,538 R² = 0,9956
-
200
400
600
800
1.000
1.200
1.400
1.600
1.800
10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200
Ve
ico
li in
se
zio
ne
/tra
tta
Velocità in Km/h
Andamento del traffico in sezione/tratta autostradale
Veicoli in sezione
Potenza (Veicoli in sezione)
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina2
8
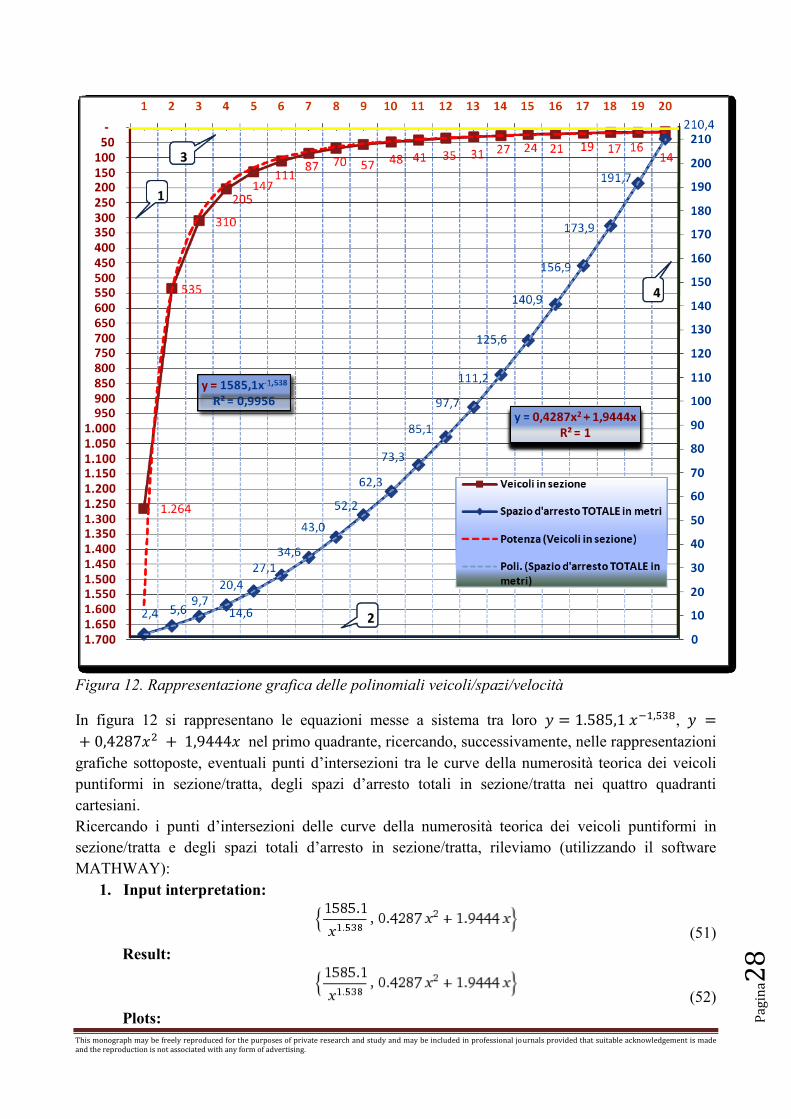
Figura 12. Rappresentazione grafica delle polinomiali veicoli/spazi/velocità
In figura 12 si rappresentano le equazioni messe a sistema tra loro ,
nel primo quadrante, ricercando, successivamente, nelle rappresentazioni
grafiche sottoposte, eventuali punti d’intersezioni tra le curve della numerosità teorica dei veicoli
puntiformi in sezione/tratta, degli spazi d’arresto totali in sezione/tratta nei quattro quadranti
cartesiani.
Ricercando i punti d’intersezioni delle curve della numerosità teorica dei veicoli puntiformi in
sezione/tratta e degli spazi totali d’arresto in sezione/tratta, rileviamo (utilizzando il software
MATHWAY):
1. Input interpretation:
(51)
Result:
(52)
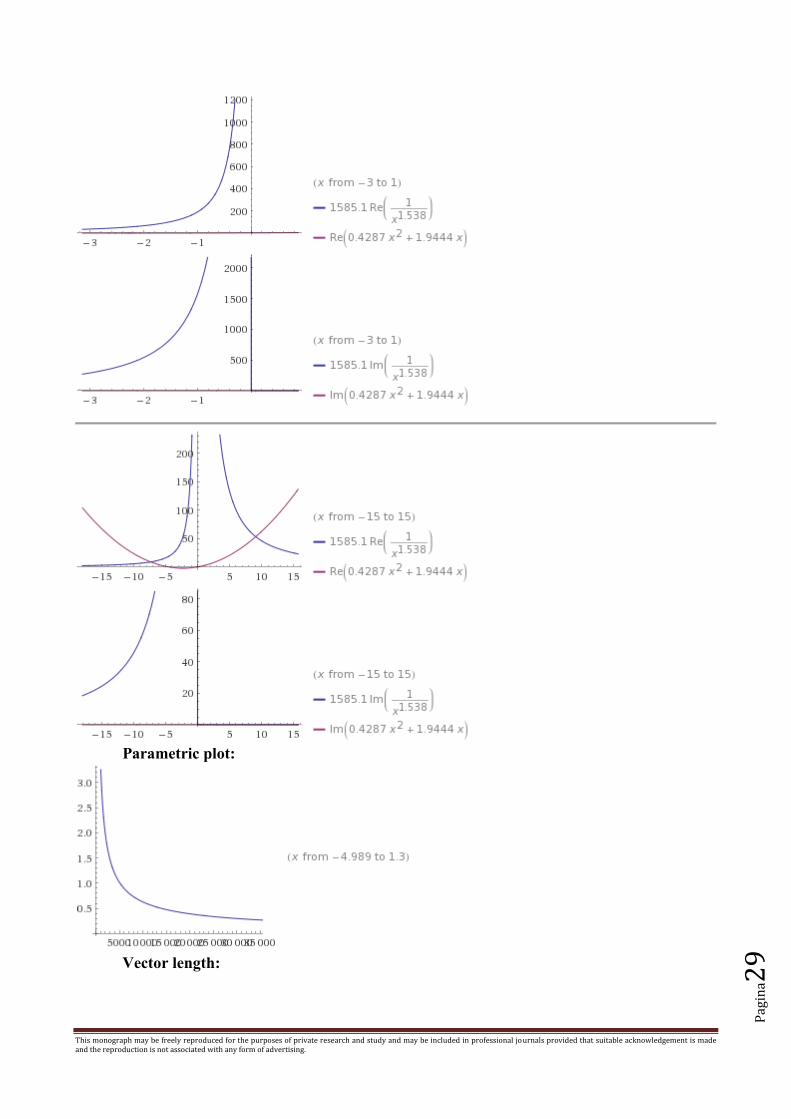
Plots:
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina2
9
Parametric plot:
Vector length:
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina3
0
(53)
Solutions:
per , indeterminata
Poiché il sistema ha radici il cui calcolo si deve necessariamente avvalere di appossimazioni,
l’applicazione del teorema di esistenza della radice come del primo e del secondo teorema di unicità
della radice appare complicato e il metodo di bisezione è di difficile applicazione.
Si rende necessaria, allora, l’analisi grafica.
Analisi grafica
La curva rossa dei veicoli/puntiformi (in realtà stiamo computando con delle “sezioni/blocchi di
sicurezza” i cui punti di frontiera dell’insieme delle distanze di sicurezza sono rappresentate dai
veicoli puntiformi) in plotoni/correnti accodati, rappresenta la massima produttività
tecnica/redditività che viene raggiunta dalla sezione autostradale.
La curva azzurra delle distanze di sicurezza, nella sua rappresentazione, costituisce il principale
vincolo legale (laddove esiste un range di velocità legale, come in Italia), l’ostacolo alla massima
produttività tecnica.
Le condizioni di massima produttività tecnica si rappresentano, nel piano cartesiano, dalle due
curve:
in condizione statica del traffico, a velocità pari a zero, in categoria 1
in condizione dinamica del traffico e alla massima velocità legale consentita ai veicoli, in
categoria 13
in condizione dinamica del traffico, alla massima velocità fisica consentita ai veicoli, in
condizioni d’illegalità - nel nostro grafico
Le antinomie
Dall’analisi grafica, si evidenziano delle antinomie trattabili secondo la teoria dell’ottimizzazione
con vincoli, la cui forma generica è:
(funzione obiettivo) (54)
(55)
(vincoli)
(56)
che rappresenta un problema con n variabili ed m vincoli. I vincoli e l'obiettivo sono funzioni reali a
variabili vettoriali e possono anche rappresentare dei vincoli sul valore delle variabili (ad esempio
di non negatività o di integralità). I vincoli e l'obiettivo possono essere quelli lineari di PL e il
modello generico diventa, quindi:
(funzione obiettivo) (57)
(58)
(vincoli)
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina3
1
(59)
Antinomia 1: sarebbe costituita dall’accettazione, da parte del conducente, di una condizione statica
a velocità pari a zero in sezione/tratta, a distanza di sicurezza pari a zero, per un totale di veicoli
medi puntiformi di 1.700 unità statiche. Dividendo per la lunghezza media per classe veicolare
autostradale (A, B) si ottiene la reale presenza veicolare densitometrica in condizione statica.
L’espressione cartesiana è rappresentata dall’asse stesso delle ordinate (retta rossa 1).
Antinomia 2: (del “trenino”): sarebbe costituita dall’accettazione, da parte del conducente, di una
condizione dinamica a velocità massima meccanica consentita dai veicoli in condizione omotachica
e a distanza di sicurezza pari a zero, per un totale di veicoli medi puntiformi di 1.700 unità
dinamiche. Dividendo per la lunghezza media per classe veicolare (A, B) si ottiene la reale presenza
densitometrica veicolare in condizione dinamica. L’espressione cartesiana è rappresentata dall’asse
stesso delle ascisse (retta azzurra 2).
Antinomia 3: (paradosso di San Pietroburgo) sarebbe costituita dall’accettazione, da parte del
conducente un veicolo isolato, in condizione dinamica, a velocità massima meccanica consentita, di
pagare un prezzo di pedaggio pari all’equivalente reddituale del plotone/corrente veicolare in
sezione/tratta. L’espressione cartesiana è rappresentata dall’asse stesso delle ascisse reciproche
(retta gialla 3).
Antinomia 4: (primo paradosso contro il movimento - di Zenone) sarebbe costituita
dall’accettazione, da parte dei conducenti, di condizioni dinamiche a velocità massima meccanica
consentita dai veicoli in condizione omotachica e a distanza di sicurezza variabili fino a zero. È la
condizione di incidentalità a causa di un’ostacolo in sezione. L’espressione cartesiana è
rappresentata dall’asse stesso delle ordinate reciproche (retta verde 4).
L’indifferenza, secondo la teoria dell’utilità-valore, si avrebbe in laddove si eguagliano le due
equazioni per cioè non in questo piano cartesiano e in
genere nello spazio tridimensionale, in quanto, in questo spazio, la numerosità dei veicoli
puntiformi dipende dalle distanze di sicurezza che dipendono, a loro volta, dalle velocità raggiunte.
Le curve ottenute sono rigide, e l’occhio grafico generato rimane, in condizioni teoriche e di
massima legalità, costante.
Il processo decisionale del conducente
Nel costruire la lista delle decisioni possibili assumibili da parte del conducente, risulta difficile
considerare “tutto quanto possa accadere” ma, per quanto possibile, si tiene presente tutto quanto
possa condizionare la scelta della decisione da parte del conducente e che si possa ragionevolmente
verificare.
La soluzione del problema, si ottiene utilizzando la teoria delle decisioni, cioè facendo decidere il
conducente-decisore, su quale debba intraprendere, tra le varie strategie alternative di guida
immediate-future ammissibili “per fas” e non ammissibili “nefas”, nella ricerca del pay-off
conforme ai propri interessi, “pro aris et focis”, strategie e azioni il cui esito dipende anche da
fattori esterni che non possono essere previsti, come gli scenari, combinazione di insiemi di eventi
definiti nella teoria delle decisioni come “stati di natura”.
L’espressione generale dei fattori esterni non prevedibili viene rappresentata [NdA: non qui] in
primis dalla matrice di pay-off degli “stati di natura”. La struttura decisionale si completa, poi, con
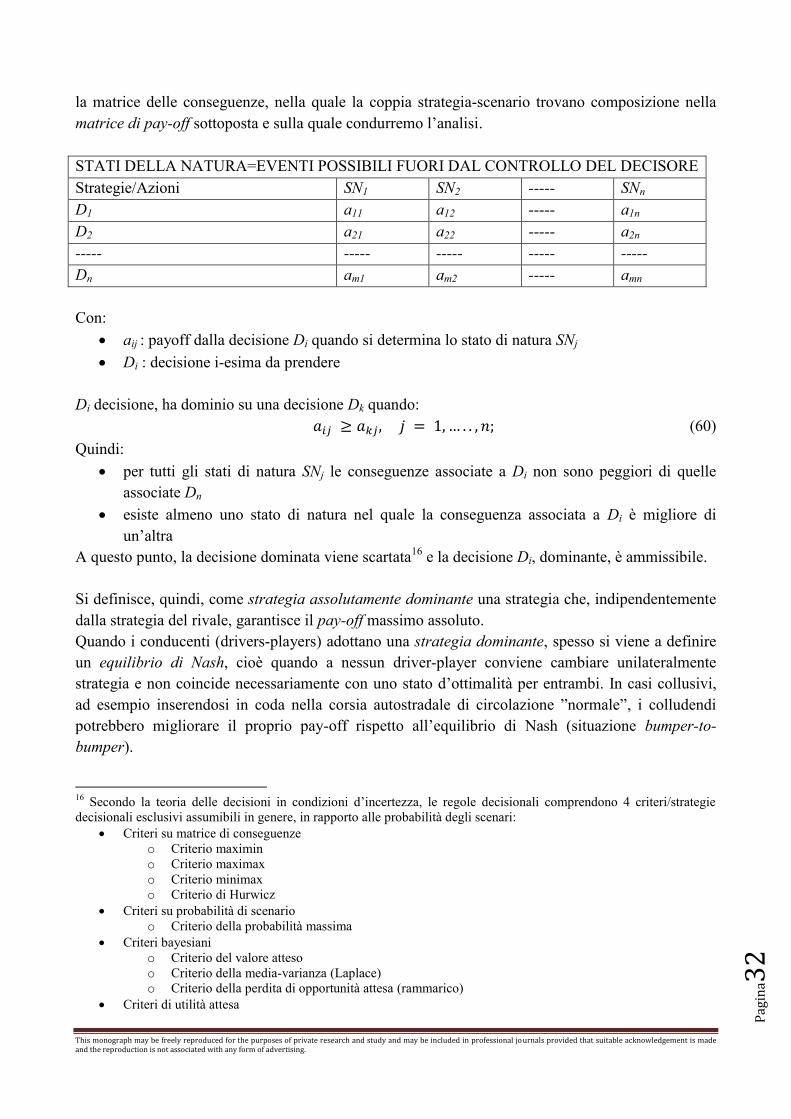
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina3
2
la matrice delle conseguenze, nella quale la coppia strategia-scenario trovano composizione nella
matrice di pay-off sottoposta e sulla quale condurremo l’analisi.
STATI DELLA NATURA=EVENTI POSSIBILI FUORI DAL CONTROLLO DEL DECISORE
Strategie/Azioni SN1 SN2 ----- SNn
D1 a11 a12 ----- a1n
D2 a21 a22 ----- a2n
----- ----- ----- ----- -----
Dn am1 am2 ----- amn
Con:
aij : payoff dalla decisione Di quando si determina lo stato di natura SNj
Di : decisione i-esima da prendere
Di decisione, ha dominio su una decisione Dk quando:
(60)
Quindi:
per tutti gli stati di natura SNj le conseguenze associate a Di non sono peggiori di quelle
associate Dn
esiste almeno uno stato di natura nel quale la conseguenza associata a Di è migliore di
un’altra
A questo punto, la decisione dominata viene scartata16
e la decisione Di, dominante, è ammissibile.
Si definisce, quindi, come strategia assolutamente dominante una strategia che, indipendentemente
dalla strategia del rivale, garantisce il pay-off massimo assoluto.
Quando i conducenti (drivers-players) adottano una strategia dominante, spesso si viene a definire
un equilibrio di Nash, cioè quando a nessun driver-player conviene cambiare unilateralmente
strategia e non coincide necessariamente con uno stato d’ottimalità per entrambi. In casi collusivi,
ad esempio inserendosi in coda nella corsia autostradale di circolazione ”normale”, i colludendi
potrebbero migliorare il proprio pay-off rispetto all’equilibrio di Nash (situazione bumper-to-
bumper).
16
Secondo la teoria delle decisioni in condizioni d’incertezza, le regole decisionali comprendono 4 criteri/strategie
decisionali esclusivi assumibili in genere, in rapporto alle probabilità degli scenari:
Criteri su matrice di conseguenze
o Criterio maximin
o Criterio maximax
o Criterio minimax
o Criterio di Hurwicz
Criteri su probabilità di scenario
o Criterio della probabilità massima
Criteri bayesiani
o Criterio del valore atteso
o Criterio della media-varianza (Laplace)
o Criterio della perdita di opportunità attesa (rammarico)
Criteri di utilità attesa

This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina3
3
La funzione conseguenze, come nella risoluzione matriciale, possono avere forma di numeri (o
meno), ma in ogni caso, date due o più conseguenze, il driver-player dev’essere in grado di stabilire
quale conseguenza preferire o se siano tutte equivalenti. In genere, un driver-player vorrebbe
riuscire a ottenere per sé la conseguenza migliore, ma siccome può scegliere solo secondo il fattore
umano personale e non sullo scenario, non è in grado di arrivare a scegliere la conseguenza a cui
potrà andare (quasi) sicuramente incontro.
Introducento il criterio K di ottimalità e data C la funzione, si può descrivere la decisione del driver-
player, per come:
(61)
Un driver-player decide secondo il criterio maximin (Wald), corrispondente all’ipotesi più
pessimistica della perdita di opportunità, in relazione alla risposta degli altri drivers-players, quando
considera e calcola, come sintesi valoriale, per ciascuna strategia in disponibilità, il pay-off minimo
e sceglie la strategia che si comporti “meno peggio” o di “limitazione delle perdite”, per
come:
(62)
Un driver-player decide secondo il criterio maximax, corrispondente all’ipotesi più ottimistica
dell’acquisto di opportunità, in relazione alla risposta degli altri drivers-players, quando considera e
calcola, come sintesi valoriale, per ciascuna strategia in disponibilità, il pay-off massimo e sceglie
la strategia che si comporti “al massimo”, per come:
(63)
Un driver-player decide secondo il criterio minimax, corrispondente all’ipotesi meno pessimistica
della perdita di opportunità in relazione alla risposta degli altri drivers-players, quando considera e
calcola, come sintesi valoriale, per ciascuna strategia in disponibilità, il pay-off minimo del
massimo di perdita e sceglie la strategia che si comporti “al meglio”, per
come:
(64)
Un driver-player decide per ciascuna strategia in disponibilità secondo il criterio di Hurwicz, in
relazione alla risposta degli altri drivers-players, quando considera e calcola, come sintesi valoriale,
sia la conseguenza migliore, sia quella peggiore computate secondo il prezzo-ombra (saggio
marginale di sostituzione), per come:
(65)
dove:
Un driver-player decide per ciascuna strategia in disponibilità secondo il criterio della probabilità
massima, in relazione alla risposta degli altri drivers-players, quando considera e calcola, come
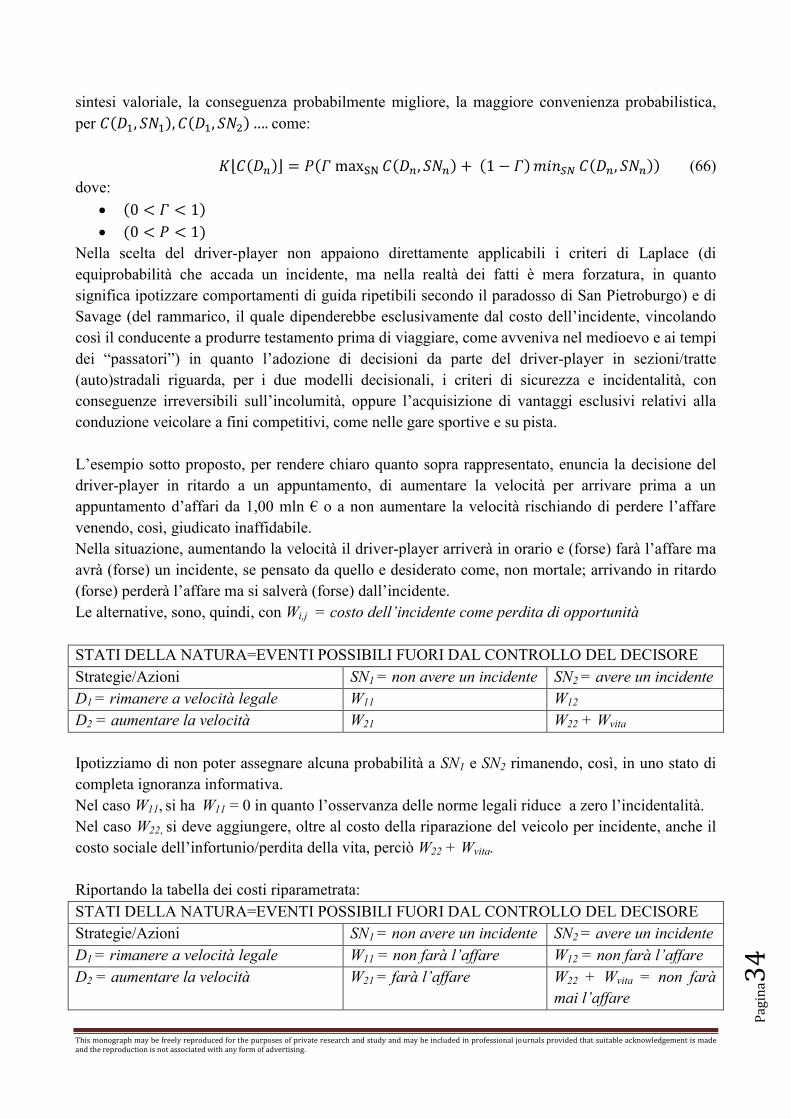
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina3
4
sintesi valoriale, la conseguenza probabilmente migliore, la maggiore convenienza probabilistica,
per come:
(66)
dove:
Nella scelta del driver-player non appaiono direttamente applicabili i criteri di Laplace (di
equiprobabilità che accada un incidente, ma nella realtà dei fatti è mera forzatura, in quanto
significa ipotizzare comportamenti di guida ripetibili secondo il paradosso di San Pietroburgo) e di
Savage (del rammarico, il quale dipenderebbe esclusivamente dal costo dell’incidente, vincolando
così il conducente a produrre testamento prima di viaggiare, come avveniva nel medioevo e ai tempi
dei “passatori”) in quanto l’adozione di decisioni da parte del driver-player in sezioni/tratte
(auto)stradali riguarda, per i due modelli decisionali, i criteri di sicurezza e incidentalità, con
conseguenze irreversibili sull’incolumità, oppure l’acquisizione di vantaggi esclusivi relativi alla
conduzione veicolare a fini competitivi, come nelle gare sportive e su pista.
L’esempio sotto proposto, per rendere chiaro quanto sopra rappresentato, enuncia la decisione del
driver-player in ritardo a un appuntamento, di aumentare la velocità per arrivare prima a un
appuntamento d’affari da 1,00 mln € o a non aumentare la velocità rischiando di perdere l’affare
venendo, così, giudicato inaffidabile.
Nella situazione, aumentando la velocità il driver-player arriverà in orario e (forse) farà l’affare ma
avrà (forse) un incidente, se pensato da quello e desiderato come, non mortale; arrivando in ritardo
(forse) perderà l’affare ma si salverà (forse) dall’incidente.
Le alternative, sono, quindi, con Wi,j = costo dell’incidente come perdita di opportunità
STATI DELLA NATURA=EVENTI POSSIBILI FUORI DAL CONTROLLO DEL DECISORE
Strategie/Azioni SN1 = non avere un incidente SN2 = avere un incidente
D1 = rimanere a velocità legale W11 W12
D2 = aumentare la velocità W21 W22 + Wvita
Ipotizziamo di non poter assegnare alcuna probabilità a SN1 e SN2 rimanendo, così, in uno stato di
completa ignoranza informativa.
Nel caso W11, si ha W11 = 0 in quanto l’osservanza delle norme legali riduce a zero l’incidentalità.
Nel caso W22, si deve aggiungere, oltre al costo della riparazione del veicolo per incidente, anche il
costo sociale dell’infortunio/perdita della vita, perciò W22 + Wvita.
Riportando la tabella dei costi riparametrata:
STATI DELLA NATURA=EVENTI POSSIBILI FUORI DAL CONTROLLO DEL DECISORE
Strategie/Azioni SN1 = non avere un incidente SN2 = avere un incidente
D1 = rimanere a velocità legale W11 = non farà l’affare W12 = non farà l’affare
D2 = aumentare la velocità W21 = farà l’affare W22 + Wvita = non farà
mai l’affare
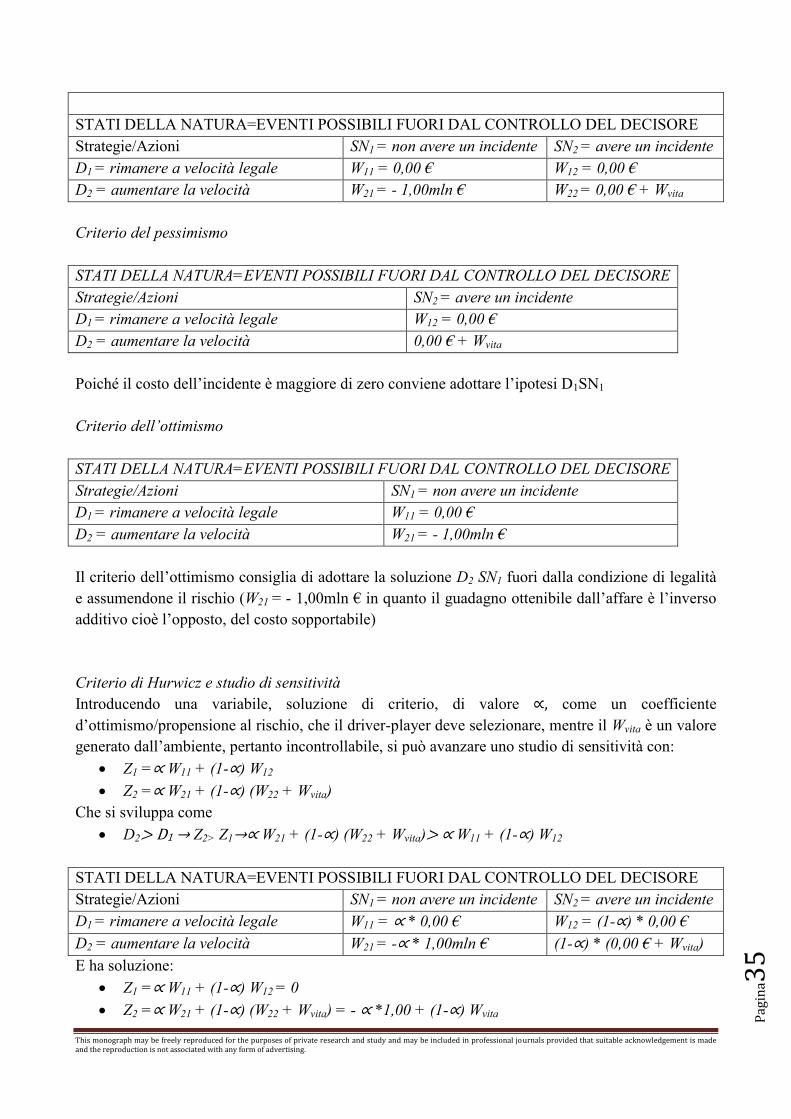
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina3
5
STATI DELLA NATURA=EVENTI POSSIBILI FUORI DAL CONTROLLO DEL DECISORE
Strategie/Azioni SN1 = non avere un incidente SN2 = avere un incidente
D1 = rimanere a velocità legale W11 = 0,00 € W12 = 0,00 €
D2 = aumentare la velocità W21 = - 1,00mln € W22 = 0,00 € + Wvita
Criterio del pessimismo
STATI DELLA NATURA=EVENTI POSSIBILI FUORI DAL CONTROLLO DEL DECISORE
Strategie/Azioni SN2 = avere un incidente
D1 = rimanere a velocità legale W12 = 0,00 €
D2 = aumentare la velocità 0,00 € + Wvita
Poiché il costo dell’incidente è maggiore di zero conviene adottare l’ipotesi D1SN1
Criterio dell’ottimismo
STATI DELLA NATURA=EVENTI POSSIBILI FUORI DAL CONTROLLO DEL DECISORE
Strategie/Azioni SN1 = non avere un incidente
D1 = rimanere a velocità legale W11 = 0,00 €
D2 = aumentare la velocità W21 = - 1,00mln €
Il criterio dell’ottimismo consiglia di adottare la soluzione D2 SN1 fuori dalla condizione di legalità
e assumendone il rischio (W21 = - 1,00mln € in quanto il guadagno ottenibile dall’affare è l’inverso
additivo cioè l’opposto, del costo sopportabile)
Criterio di Hurwicz e studio di sensitività
Introducendo una variabile, soluzione di criterio, di valore , come un coefficiente
d’ottimismo/propensione al rischio, che il driver-player deve selezionare, mentre il Wvita è un valore
generato dall’ambiente, pertanto incontrollabile, si può avanzare uno studio di sensitività con:
Z1 = W11 + (1- ) W12
Z2 = W21 + (1- ) (W22 + Wvita)
Che si sviluppa come
D2> D1 Z2> Z1 W21 + (1- ) (W22 + Wvita)> W11 + (1- ) W12
STATI DELLA NATURA=EVENTI POSSIBILI FUORI DAL CONTROLLO DEL DECISORE
Strategie/Azioni SN1 = non avere un incidente SN2 = avere un incidente
D1 = rimanere a velocità legale W11 = * 0,00 € W12 = (1- ) * 0,00 €
D2 = aumentare la velocità W21 = - * 1,00mln € (1- ) * (0,00 € + Wvita)
E ha soluzione:
Z1 = W11 + (1- ) W12 = 0
Z2 = W21 + (1- ) (W22 + Wvita) = - *1,00 + (1- ) Wvita
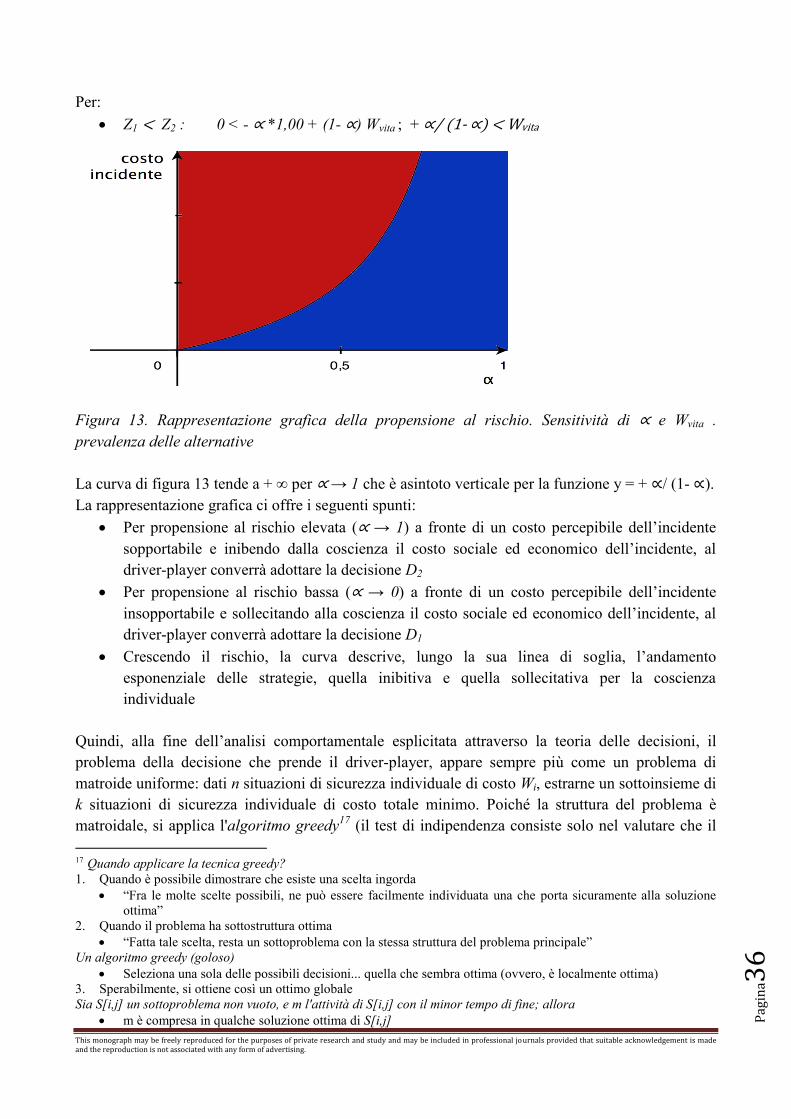
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina3
6
Per:
Z1 < Z2 : 0 < - *1,00 + (1- ) Wvita ; + / (1- Wvita
Figura 13. Rappresentazione grafica della propensione al rischio. Sensitività di e Wvita .
prevalenza delle alternative
La curva di figura 13 tende a + ∞ per → 1 che è asintoto verticale per la funzione y = + / (1- ).
La rappresentazione grafica ci offre i seguenti spunti:
Per propensione al rischio elevata ( → 1) a fronte di un costo percepibile dell’incidente
sopportabile e inibendo dalla coscienza il costo sociale ed economico dell’incidente, al
driver-player converrà adottare la decisione D2
Per propensione al rischio bassa ( → 0) a fronte di un costo percepibile dell’incidente
insopportabile e sollecitando alla coscienza il costo sociale ed economico dell’incidente, al
driver-player converrà adottare la decisione D1
Crescendo il rischio, la curva descrive, lungo la sua linea di soglia, l’andamento
esponenziale delle strategie, quella inibitiva e quella sollecitativa per la coscienza
individuale
Quindi, alla fine dell’analisi comportamentale esplicitata attraverso la teoria delle decisioni, il
problema della decisione che prende il driver-player, appare sempre più come un problema di
matroide uniforme: dati n situazioni di sicurezza individuale di costo Wi, estrarne un sottoinsieme di
k situazioni di sicurezza individuale di costo totale minimo. Poiché la struttura del problema è
matroidale, si applica l'algoritmo greedy17
(il test di indipendenza consiste solo nel valutare che il
17 Quando applicare la tecnica greedy?
1. Quando è possibile dimostrare che esiste una scelta ingorda
“Fra le molte scelte possibili, ne può essere facilmente individuata una che porta sicuramente alla soluzione
ottima”
2. Quando il problema ha sottostruttura ottima
“Fatta tale scelta, resta un sottoproblema con la stessa struttura del problema principale”
Un algoritmo greedy (goloso)
Seleziona una sola delle possibili decisioni... quella che sembra ottima (ovvero, è localmente ottima)
3. Sperabilmente, si ottiene così un ottimo globale
Sia S[i,j] un sottoproblema non vuoto, e m l'attività di S[i,j] con il minor tempo di fine; allora
m è compresa in qualche soluzione ottima di S[i,j]
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina3
7
sottoinsieme corrente non superi cardinalità k). In altre parole, si rendono i k oggetti di sicurezza
individuale di costo minimo18
.
Se i valori sono incerti e definiti in intervalli oppure , si può
ottimizzare la robustezza assoluta in tempo polinomiale, dato che è sufficiente considerare i valori
estremi (minimo e massimo) di ogni costo di sicurezza e non è necessario considerarne tutte le
combinazioni, grazie a regole di dominanza viste sopra. Se i valori sono definiti a scenari, oppure si
ottimizza la deviazione robusta, il problema risulta NP-completo per riduzione19
, dal problema della
Partizione20
.
In modo alternativo diverso, un criterio applicabile per le decisioni del conducente del veicolo
risulta dalla valutazione dicotomica del tempo trascorso in vettura e la velocità esprimibile dal
conducente rispetto al valore del tempo trascorso in vettura e valore dato dallo strato a cui
appartiente il conducente al tempo residuo da trascorrere in vettura, ma l’argomento esula da questo
articolo, in quanto relativo all’analisi della domanda. Non c’è un comportamento del conducente
ascrivibile a un modello interpretabile nel medio-lungo periodo ma è contingente alla situazione e
all’evento esterno generato.
A questo punto, non rimane che enunciare i fattori esterni che regolano la circolazione e il traffico
in sezioni/tratte autostradali, tenendo presente quanto detto all’inizio del paragrafo 6 a proposito
dell’approccio fluidodinamico, applicando le equazioni di continuità e del bilancio di massa21
. A
il sottoproblema S[i,m] è vuoto
Conseguenze:
Non è più necessario analizzare tutti i possibili valori di k
Faccio una scelta “ingorda”, ma sicura: seleziono l'attività m con il minor tempo di fine
Non è più necessario analizzare due sottoproblemi:
Elimino tutte le attività che non sono compatibili con la scelta ingorda
Resta solo un sottoproblema da risolvere: S[m,j]
(ridotto da: http://disi.unitn.it/~montreso/asd/lucidi/14-greedy-up.pdf). 18
Arcaini P., Cordone R., http://homes.di.unimi.it/~cordone/courses/2009-mmsd/Lez15-090430-PCI.pdf 19 Fino ad ora, tutti gli algoritmi conosciuti per problemi NP-Completi necessitano di un tempo superpolinomiale
nella dimensione dell' input. L' esistenza di algoritmi più veloci è sconosciuta. Quindi, per risolvere un problema NP-
Completo di dimensioni non banali, generalmente vengono utilizzati i seguenti approcci:
Algoritmo di approssimazione: Un algoritmo che trova velocemente una soluzione sub-ottimale che si trova
in un intorno (noto) di quella ottimale
Algoritmo probabilistico: Un algoritmo il cui tempo medio di esecuzione per una distribuzione data del
problema è provata essere buona—idealmente, uno che assegna una bassa probabilità a input "difficili"
Casi speciali: Un algoritmo veloce se l' istanza del problema appartiene all' insieme di alcuni casi speciali. La
parametrizzazione della complessità può essere vista come una generalizzazione di questo approccio
Euristica: Un algoritmo che funziona "ragionevolmente bene" in molti casi, ma per cui non c' è prova che sia
sempre veloce e che dia buoni risultati.
Un esempio di algoritmo euristico è l' algoritmo greedy sub-ottimale O(n log n) (ridotto da:
http://it.wikipedia.org/wiki/NP-Completo). 20 Averbakh I., Lebedev V. (2004), Interval data minmax regret network optimization problems, Discrete Applied
Mathematics, 138, 289-301.
Karasan O.E., Pinar M.C., Yaman H. (2001), The robust shortest path problem with interval data, Bilkent University,
Ankara, Turkey. 21 Esempio di applicazione del bilancio di massa: la velocità di fuga da un ingorgo stradale in area urbana aumenta
all’aumentare dell’ingombro laterale. Appena dopo i cantieri mobili autostradali, purché segnalati, la velocità di fuga
degli autoveicoli aumenta sempre, diminuendo le distanze di sicurezza nelle code in prossimità dell’ingorgo, in accordo
con i modelli lineare di Greenshield o logaritmico di Greenberg o quello di Underwood. In prossimità della restrizione,
la densità (da sperimentazione) sale ad un valore Kb dovuto alla ridotta velocità che consente distanziamenti inferiori

This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina3
8
tal fine è bene ricordare quanta influenza possa avere sull’equazione di continuità il teorema di
Bernoulli applicato ai trasporti terrestri22
e legato alla velocità di efflusso torricelliana23
.
Dalla relazione finale dello studio portato a termine dall’autore nel 2003, presso la Società
Autostradale Brescia-Verona-Vicenza-Padova s.p.a., che è concessionaria delle autostrade A4 (da
Brescia Ovest a Padova Est) e A 31 (da Vicenza a Piovene Rocchette), è emerso un insieme di
fattori che sono relativi al traffico in sezione/tratta autostradale, risultanti, in sintesi, come:
A. Incidentalità, incidenti e cantieri
gli eventi incidentali sono determinati al 50% ca. da tamponamenti, scontri fronto-laterali e
scontri laterali nella stessa carreggiata e causati per il 15% da perdita di materiali in carreggiata
stessa
gli incidenti accadono prevalentemente di giorno, senza un’ora precisa
accadono in condizioni meteo buone
avvengono per svariati motivi, nessuno veramente prevalente
avvengono con maggiore frequenza in tratti curvilinei indotti o naturali (svincoli)
accadono in giorni casuali
sono influenzati dalla presenza di cantieri fissi (65%)
sono un po’ meno influenzati dalla presenza di cantieri mobili
non coinvolgono significativamente veicoli particolari
si distribuiscono quasi uniformemente nelle carreggiate Nord e Sud di A31, mentre prevalgono
in carreggiata Est piuttosto che Ovest di A4 (8 punti percentuali di differenza)
B. Incidentalità e nazionalità
(condizione di "coda" in movimento, o deflusso ipercritico) mentre appena dopo l'ostruzione si ha una densità Km
normalizzata inferiore a quella in condizioni stazionarie.
La propagazione dei diversi stati di deflusso (definiti da una terna di velocità, densità e flusso) avviene secondo onde
che generalmente si considerano (per approssimazione) puntuali, e che vengono definite onde cinematiche. Dal luogo
dell' accadimento partirà verso monte una cosiddetta "onda d' urto" W che investirà la corrente veicolare a densità
normale K e in ogni istante separa questa dalla corrente in stato di coda. Poiché il numero di veicoli che in un
intervallo di tempo t si trovano investiti dall' onda è costante, si ha che quindi la
velocità dell' onda d' urto è data da , ovvero la pendenza della corda che congiunge il punto sulla parabola
flusso/densità appena prima dell' accadimento (A) con quello sul ramo "congestionato" corrispondente alla restrizione
(B).
Una volta rimosso l' accadimento partirà un' altra onda con velocità maggiore della precedente che raggiungerà il
punto di capacità massima (C). Quando questa onda raggiungerà l' onda d' urto la coda sarà dissipata e l' ultima onda
da C ad A riporterà il sistema alle condizioni iniziali di deflusso (ridotto da: Wikipedia,
http://it.wikipedia.org/wiki/Deflusso_veicolare). 22 Nel caso di trasporti terrestri è possibile trascurare il termine gravitazionale dell' equazione di Bernoulli in quanto le
linee di flusso veicolare a cui si fa riferimento hanno approssimativamente la stessa energia potenziale (da: Ferrarese
M. (2012), un approccio epistemologico all’annoso problema delle infrastrutture e dei trasporti, CEDAM, Padova). 23 La legge di Torricelli afferma che la velocità di un fluido in uscita da un foro (di sezione molto piccola rispetto alle
dimensioni del recipiente) è pari alla radice quadrata del doppio prodotto dell' accelerazione di gravità e della distanza
"h" fra il pelo libero del fluido e il centro del foro che è stato praticato:
La velocità è uguale a quella che avrebbe il fluido durante una caduta libera dall' altezza "h". L' equazione di
Torricelli può essere ottenuta, calcolando il differenziale di questa formula, a meno di una costante arbitraria (che è
la velocità iniziale vi). Gli unici termini variabili sono la velocità v e l' altezza h. Nel trasporto stradale sostituiamo
l’altezza h con la lunghezza della sezione di traffico L, la gravità (nell’ambito del trasporto terrestre), viene trascurata
poiché ininfluente (da: Ferrarese M. (2012), ibidem).
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina3
9
In assenza di dati relativi all’universo statistico del traffico veicolare suddiviso per tipologia dei
veicoli e nazionalità, non è possibile individuare la relazione statistica, con metodi scientifici, tra
incidentalità e nazionalità.
Il fenomeno si è valutato, quindi, attraverso una procedura statistica di frequenza, in valori assoluto
e relativo, rilevando che i veicoli stranieri (prevalentemente dell’Est) coinvolti in incidenti
sommano al 15,5% (anno 2002).
Dalla relazione operativa 2003 emerge che il fenomeno incidentale appare veramente casuale
rispetto alle condizioni meteorologiche, alle condizioni infrastrutturali e alle abilità, nazionalità e
condizioni psicofisiche dei conducenti.
E’ necessario, allora, per quanto analizzato, presentare un modello economico di gestione, più che
di previsione, il quale ottimizzi, per avvicinamenti successivi e di approssimazione matematica, il
risultato economico atteso da parte del decisore manageriale del concessionario autostradale, che
deve assumere una decisione in condizioni critiche, come per esempio, nel caso di chiusura di
caselli e tratte a causa di incidenti, congestioni, avversità meteo.
Tale modello viene definito MPCA (Modello dei Parametri di Conto Autostradale) a definizione dei
parametri di conto e presentato nel prossimo paragrafo.
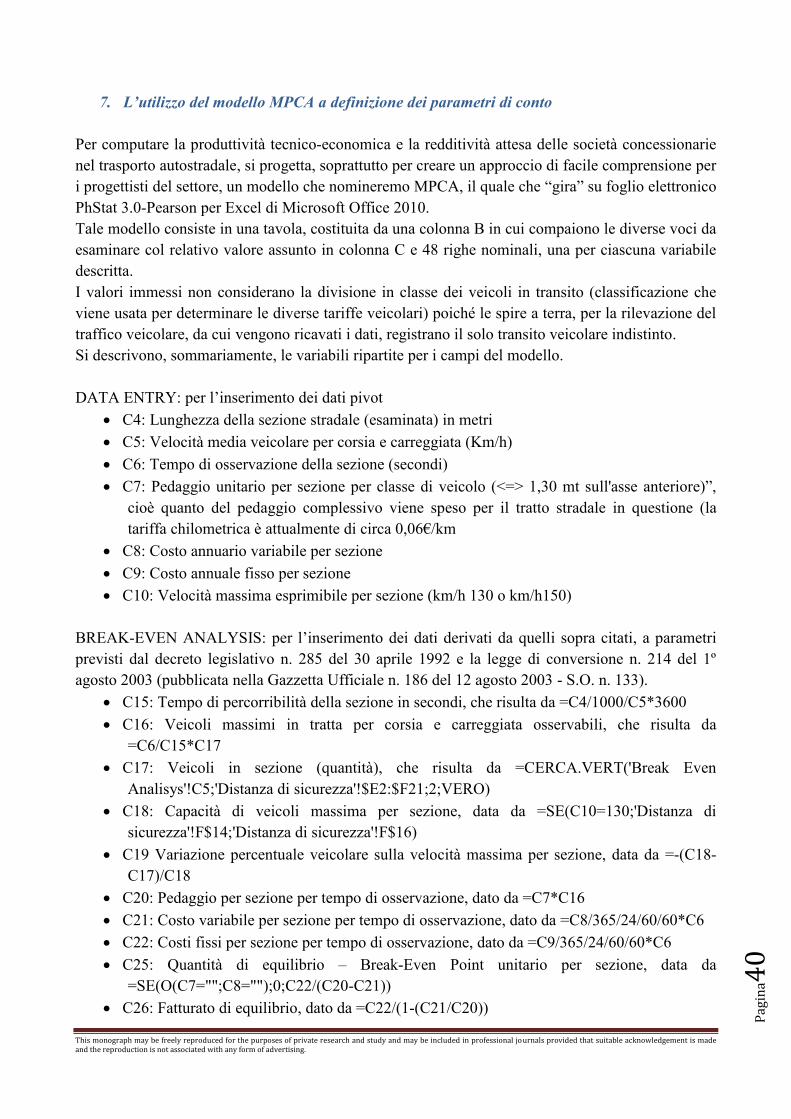
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina4
0
7. L’utilizzo del modello MPCA a definizione dei parametri di conto
Per computare la produttività tecnico-economica e la redditività attesa delle società concessionarie
nel trasporto autostradale, si progetta, soprattutto per creare un approccio di facile comprensione per
i progettisti del settore, un modello che nomineremo MPCA, il quale che “gira” su foglio elettronico
PhStat 3.0-Pearson per Excel di Microsoft Office 2010.
Tale modello consiste in una tavola, costituita da una colonna B in cui compaiono le diverse voci da
esaminare col relativo valore assunto in colonna C e 48 righe nominali, una per ciascuna variabile
descritta.
I valori immessi non considerano la divisione in classe dei veicoli in transito (classificazione che
viene usata per determinare le diverse tariffe veicolari) poiché le spire a terra, per la rilevazione del
traffico veicolare, da cui vengono ricavati i dati, registrano il solo transito veicolare indistinto.
Si descrivono, sommariamente, le variabili ripartite per i campi del modello.
DATA ENTRY: per l’inserimento dei dati pivot
C4: Lunghezza della sezione stradale (esaminata) in metri
C5: Velocità media veicolare per corsia e carreggiata (Km/h)
C6: Tempo di osservazione della sezione (secondi)
C7: Pedaggio unitario per sezione per classe di veicolo (<=> 1,30 mt sull'asse anteriore)”,
cioè quanto del pedaggio complessivo viene speso per il tratto stradale in questione (la
tariffa chilometrica è attualmente di circa 0,06€/km
C8: Costo annuario variabile per sezione
C9: Costo annuale fisso per sezione
C10: Velocità massima esprimibile per sezione (km/h 130 o km/h150)
BREAK-EVEN ANALYSIS: per l’inserimento dei dati derivati da quelli sopra citati, a parametri
previsti dal decreto legislativo n. 285 del 30 aprile 1992 e la legge di conversione n. 214 del 1º
agosto 2003 (pubblicata nella Gazzetta Ufficiale n. 186 del 12 agosto 2003 - S.O. n. 133).
C15: Tempo di percorribilità della sezione in secondi, che risulta da =C4/1000/C5*3600
C16: Veicoli massimi in tratta per corsia e carreggiata osservabili, che risulta da
=C6/C15*C17
C17: Veicoli in sezione (quantità), che risulta da =CERCA.VERT('Break Even
Analisys'!C5;'Distanza di sicurezza'!$E2:$F21;2;VERO)
C18: Capacità di veicoli massima per sezione, data da =SE(C10=130;'Distanza di
sicurezza'!F$14;'Distanza di sicurezza'!F$16)
C19 Variazione percentuale veicolare sulla velocità massima per sezione, data da =-(C18-
C17)/C18
C20: Pedaggio per sezione per tempo di osservazione, dato da =C7*C16
C21: Costo variabile per sezione per tempo di osservazione, dato da =C8/365/24/60/60*C6
C22: Costi fissi per sezione per tempo di osservazione, dato da =C9/365/24/60/60*C6
C25: Quantità di equilibrio – Break-Even Point unitario per sezione, data da
=SE(O(C7="";C8="");0;C22/(C20-C21))
C26: Fatturato di equilibrio, dato da =C22/(1-(C21/C20))
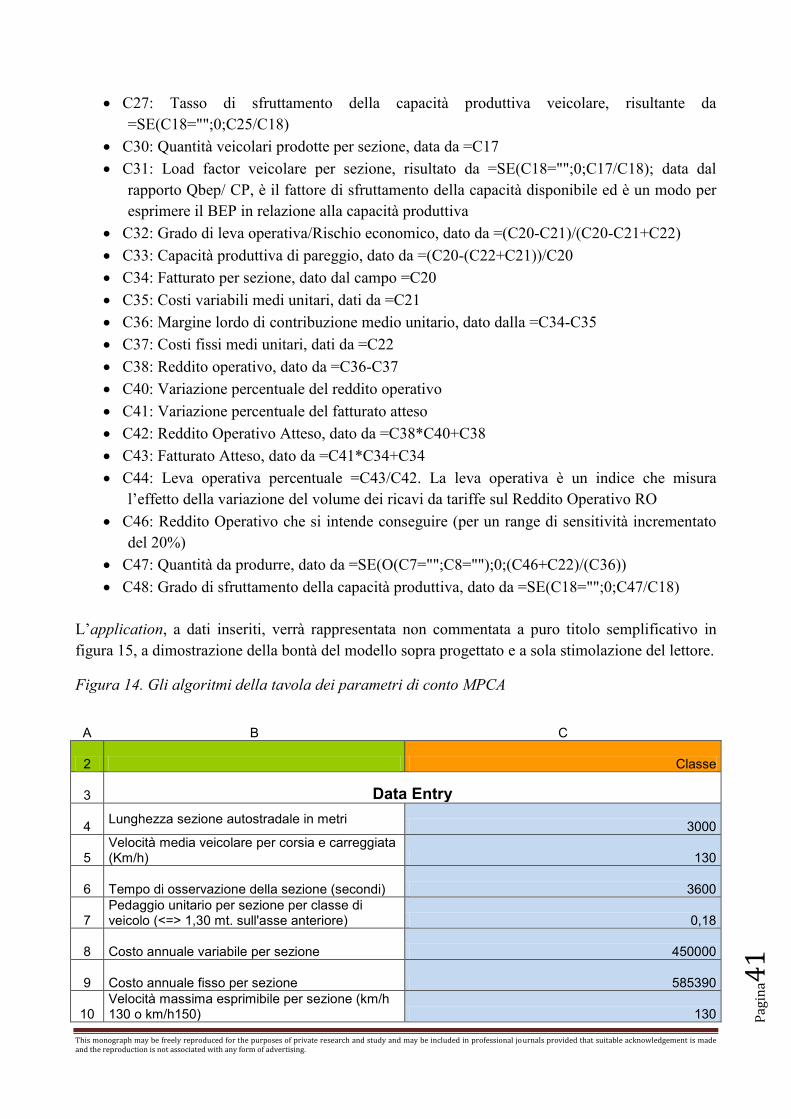
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina4
1
C27: Tasso di sfruttamento della capacità produttiva veicolare, risultante da
=SE(C18="";0;C25/C18)
C30: Quantità veicolari prodotte per sezione, data da =C17
C31: Load factor veicolare per sezione, risultato da =SE(C18="";0;C17/C18); data dal
rapporto Qbep/ CP, è il fattore di sfruttamento della capacità disponibile ed è un modo per
esprimere il BEP in relazione alla capacità produttiva
C32: Grado di leva operativa/Rischio economico, dato da =(C20-C21)/(C20-C21+C22)
C33: Capacità produttiva di pareggio, dato da =(C20-(C22+C21))/C20
C34: Fatturato per sezione, dato dal campo =C20
C35: Costi variabili medi unitari, dati da =C21
C36: Margine lordo di contribuzione medio unitario, dato dalla =C34-C35
C37: Costi fissi medi unitari, dati da =C22
C38: Reddito operativo, dato da =C36-C37
C40: Variazione percentuale del reddito operativo
C41: Variazione percentuale del fatturato atteso
C42: Reddito Operativo Atteso, dato da =C38*C40+C38
C43: Fatturato Atteso, dato da =C41*C34+C34
C44: Leva operativa percentuale =C43/C42. La leva operativa è un indice che misura
l’effetto della variazione del volume dei ricavi da tariffe sul Reddito Operativo RO
C46: Reddito Operativo che si intende conseguire (per un range di sensitività incrementato
del 20%)
C47: Quantità da produrre, dato da =SE(O(C7="";C8="");0;(C46+C22)/(C36))
C48: Grado di sfruttamento della capacità produttiva, dato da =SE(C18="";0;C47/C18)
L’application, a dati inseriti, verrà rappresentata non commentata a puro titolo semplificativo in
figura 15, a dimostrazione della bontà del modello sopra progettato e a sola stimolazione del lettore.
Figura 14. Gli algoritmi della tavola dei parametri di conto MPCA
A B C
2 Classe
3 Data Entry
4 Lunghezza sezione autostradale in metri
3000
5 Velocità media veicolare per corsia e carreggiata (Km/h) 130
6 Tempo di osservazione della sezione (secondi) 3600
7 Pedaggio unitario per sezione per classe di veicolo (<=> 1,30 mt. sull'asse anteriore) 0,18
8 Costo annuale variabile per sezione 450000
9 Costo annuale fisso per sezione 585390
10 Velocità massima esprimibile per sezione (km/h 130 o km/h150) 130
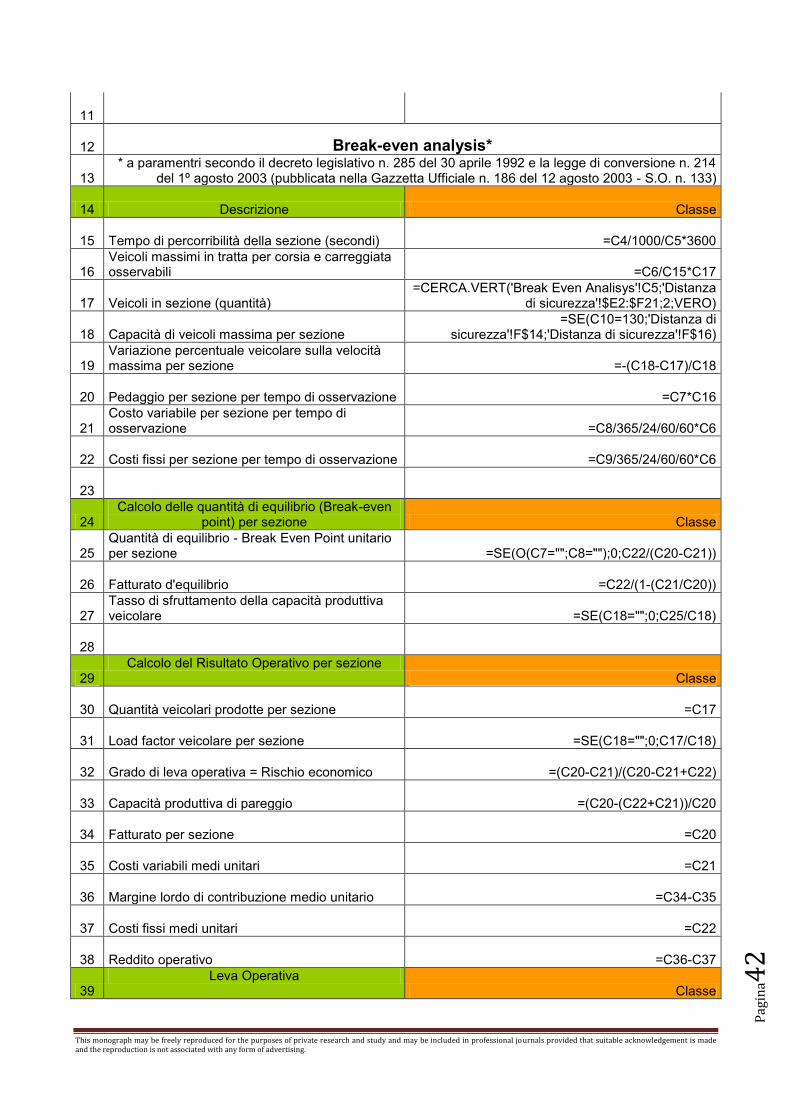
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina4
2
11
12 Break-even analysis*
13 * a paramentri secondo il decreto legislativo n. 285 del 30 aprile 1992 e la legge di conversione n. 214
del 1º agosto 2003 (pubblicata nella Gazzetta Ufficiale n. 186 del 12 agosto 2003 - S.O. n. 133)
14 Descrizione Classe
15 Tempo di percorribilità della sezione (secondi) =C4/1000/C5*3600
16 Veicoli massimi in tratta per corsia e carreggiata osservabili =C6/C15*C17
17 Veicoli in sezione (quantità) =CERCA.VERT('Break Even Analisys'!C5;'Distanza
di sicurezza'!$E2:$F21;2;VERO)
18 Capacità di veicoli massima per sezione =SE(C10=130;'Distanza di
sicurezza'!F$14;'Distanza di sicurezza'!F$16)
19 Variazione percentuale veicolare sulla velocità massima per sezione =-(C18-C17)/C18
20 Pedaggio per sezione per tempo di osservazione =C7*C16
21 Costo variabile per sezione per tempo di osservazione =C8/365/24/60/60*C6
22 Costi fissi per sezione per tempo di osservazione =C9/365/24/60/60*C6
23
24 Calcolo delle quantità di equilibrio (Break-even
point) per sezione Classe
25 Quantità di equilibrio - Break Even Point unitario per sezione =SE(O(C7="";C8="");0;C22/(C20-C21))
26 Fatturato d'equilibrio =C22/(1-(C21/C20))
27 Tasso di sfruttamento della capacità produttiva veicolare =SE(C18="";0;C25/C18)
28
29 Calcolo del Risultato Operativo per sezione
Classe
30 Quantità veicolari prodotte per sezione =C17
31 Load factor veicolare per sezione =SE(C18="";0;C17/C18)
32 Grado di leva operativa = Rischio economico =(C20-C21)/(C20-C21+C22)
33 Capacità produttiva di pareggio =(C20-(C22+C21))/C20
34 Fatturato per sezione =C20
35 Costi variabili medi unitari =C21
36 Margine lordo di contribuzione medio unitario =C34-C35
37 Costi fissi medi unitari =C22
38 Reddito operativo =C36-C37
39 Leva Operativa
Classe
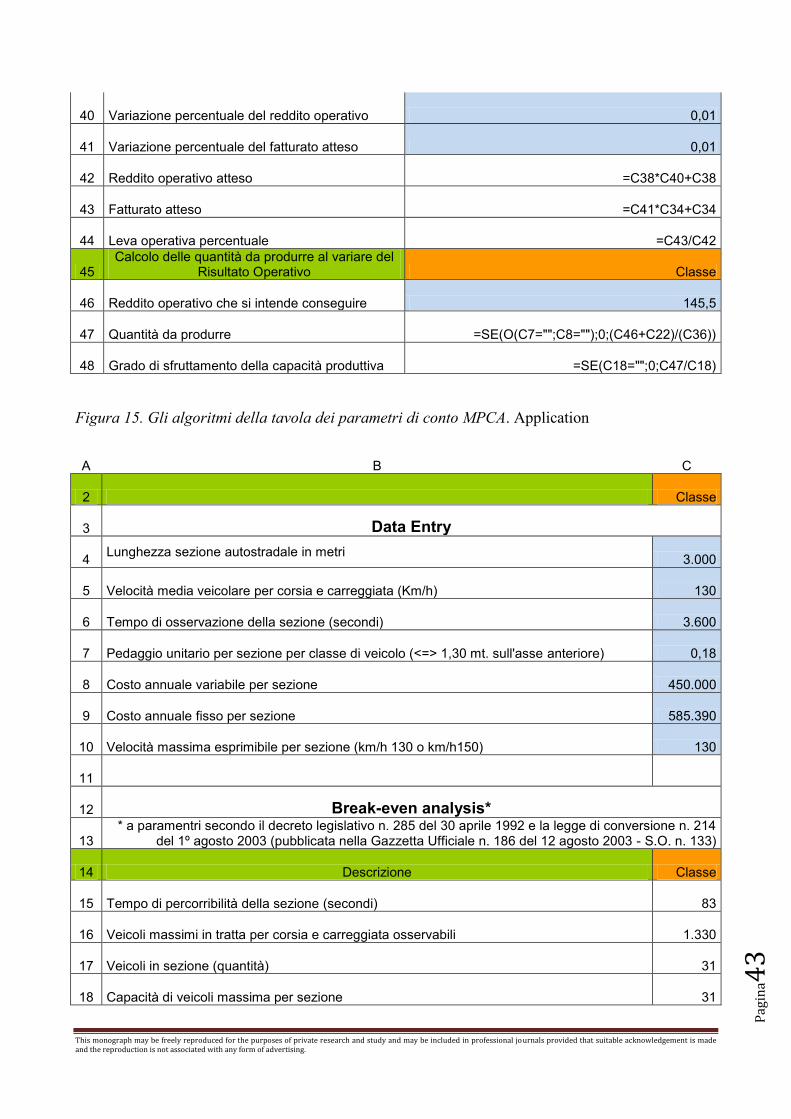
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina4
3
40 Variazione percentuale del reddito operativo 0,01
41 Variazione percentuale del fatturato atteso 0,01
42 Reddito operativo atteso =C38*C40+C38
43 Fatturato atteso =C41*C34+C34
44 Leva operativa percentuale =C43/C42
45 Calcolo delle quantità da produrre al variare del
Risultato Operativo Classe
46 Reddito operativo che si intende conseguire 145,5
47 Quantità da produrre =SE(O(C7="";C8="");0;(C46+C22)/(C36))
48 Grado di sfruttamento della capacità produttiva =SE(C18="";0;C47/C18)
Figura 15. Gli algoritmi della tavola dei parametri di conto MPCA. Application
A B C
2 Classe
3 Data Entry
4 Lunghezza sezione autostradale in metri
3.000
5 Velocità media veicolare per corsia e carreggiata (Km/h) 130
6 Tempo di osservazione della sezione (secondi) 3.600
7 Pedaggio unitario per sezione per classe di veicolo (<=> 1,30 mt. sull'asse anteriore) 0,18
8 Costo annuale variabile per sezione 450.000
9 Costo annuale fisso per sezione 585.390
10 Velocità massima esprimibile per sezione (km/h 130 o km/h150) 130
11
12 Break-even analysis*
13 * a paramentri secondo il decreto legislativo n. 285 del 30 aprile 1992 e la legge di conversione n. 214
del 1º agosto 2003 (pubblicata nella Gazzetta Ufficiale n. 186 del 12 agosto 2003 - S.O. n. 133)
14 Descrizione Classe
15 Tempo di percorribilità della sezione (secondi) 83
16 Veicoli massimi in tratta per corsia e carreggiata osservabili 1.330
17 Veicoli in sezione (quantità) 31
18 Capacità di veicoli massima per sezione 31
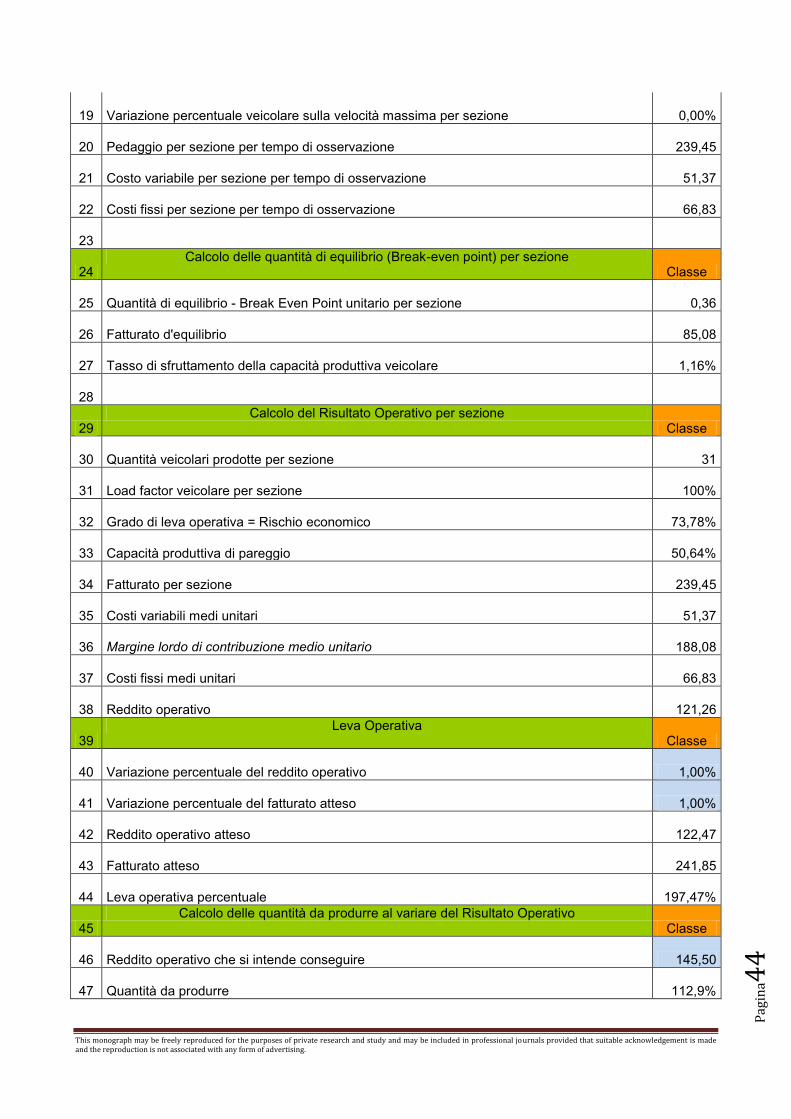
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina4
4
19 Variazione percentuale veicolare sulla velocità massima per sezione 0,00%
20 Pedaggio per sezione per tempo di osservazione 239,45
21 Costo variabile per sezione per tempo di osservazione 51,37
22 Costi fissi per sezione per tempo di osservazione 66,83
23
24 Calcolo delle quantità di equilibrio (Break-even point) per sezione
Classe
25 Quantità di equilibrio - Break Even Point unitario per sezione 0,36
26 Fatturato d'equilibrio 85,08
27 Tasso di sfruttamento della capacità produttiva veicolare 1,16%
28
29 Calcolo del Risultato Operativo per sezione
Classe
30 Quantità veicolari prodotte per sezione 31
31 Load factor veicolare per sezione 100%
32 Grado di leva operativa = Rischio economico 73,78%
33 Capacità produttiva di pareggio 50,64%
34 Fatturato per sezione 239,45
35 Costi variabili medi unitari 51,37
36 Margine lordo di contribuzione medio unitario 188,08
37 Costi fissi medi unitari 66,83
38 Reddito operativo 121,26
39 Leva Operativa
Classe
40 Variazione percentuale del reddito operativo 1,00%
41 Variazione percentuale del fatturato atteso 1,00%
42 Reddito operativo atteso 122,47
43 Fatturato atteso 241,85
44 Leva operativa percentuale 197,47%
45 Calcolo delle quantità da produrre al variare del Risultato Operativo
Classe
46 Reddito operativo che si intende conseguire 145,50
47 Quantità da produrre 112,9%
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina4
5
48 Grado di sfruttamento della capacità produttiva 3,68%
8. Conclusioni
Molte sono ancora le domande cui dare risposta, in relazione alla ricerca dei parametri di conto
economico, per scelte manageriali sulla gestione d’infrastrutture autostradali in condizioni di
criticità operativa, i quali possano diventare il focal point di una gestione caratteristica virtuosa.
Certamente, porre in evidenza e senza pregiudizi quali sono gli interventi realmente possibili in
termini operativi, permette di contenere i costi di esercizio e di valorizzare i ricavi di una società
concessionaria.
Poiché non è possibile influire direttamente sui comportamenti umani nella condotta dei veicoli
nelle carreggiate autostradali, per non entrare in aree d’illegalità, è utile conoscere quali interventi
reali siano possibili senza dover approfittare di quanto rappresentato in questo articolo per fare,
invece, pianificazione.
Quello che è stato dimostrato è che molta incidenza ha l’azione decisionale umana dei fattori esterni
in condizioni d’incertezza, mentre l’utilizzo della modellistica classica di mobilità, per la
prevenzione dei fenomeni critici, a poco serve.
Casomai, la modellistica appare come un utile strumento di pianificazione progettuale e di
programmazione generale gestionale.
Le riflessioni, a risposta di quanto richiamato nel titolo dell’articolo, impongono l’adozione di
strumenti di conoscenza dei fenomeni critici in condizioni d’incertezza e il loro trattamento
interattivo con il modello MPCA, lontano dalla manipolazione che se ne potrebbe fare, al fine di
ricercare l’utile ad ogni costo: qui è in gioco la vita umana, a cui l’economia dà sempre un prezzo
secondo l’età e l’aspettativa di vita, ma che è inapprezzabile per ogni singolo soggetto, che è
monopolista nella sua unicità razionale ed emozionale e al quale è affidata, in questo mondo,
l’incolumità propria e, per responsabilità civile, quella di tutti gli altri.
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina4
6
Bibliografia
1. Abdelwahab W. (1998), "Elasticities mode choice probabilities and market elasticities of
demand: evidence from a simultaneous mode choice/shipment-size freight transport model",
Transport Research, 34 (4) 257-266.
2. Abdelwahab W., Sargious, M.A. (1992), "Modeling the demand for freight transport: new
aroach, Journal of Transport Economics and Policy", 26 (1), 49-70.
3. Agostinaccio M., Angeletti M., Diomedi M. (1992), "Considerazioni sul deflusso autostradale
tramite degli indicatori di traffico", Vie e Trasporti, n. 586.
4. Ahmed K.I. (1999), Modeling Drivers’ Acceleration and Lane Changing Behavior, PhD
Dissertation.
5. Ahmed K. (1999), "Modeling Drivers’ Acceleration and Lane Changing Behavior", PhD thesis,
Massachusetts Institute of Technology, Cambridge.
6. AIMSUN 5.0 (2005), Microsimulator User’s Manual 5.0.6, Transport Simulation Systems.
7. Ambadipudi R., Dorothy P., R. Kill (2006), "Development and validation of large scale
microscopic models", Proceedings of the 85rd
annual meeting TRB, Washington, D. C.
8. Anas A. (1981), "The estimation of multinomial logit models of joint location and travel mode
choice from aggregate data", Journal of Regional Science, 21, 223-242.
9. Ascione L., Grimaldi A., Elementi di Meccanica dei Continui, Liguori Editore, Napoli, 1989.
10. Averbakh I., Lebedev V. (2004), "Interval data minmax regret network optimization problems",
Discrete Applied Mathematics, 138, 289-301.
11. Bando M., Hasebe K., Nakayama A., Shibata A., Sugiyama Y. (1995), "Dynamical model of
traffic congestion and numerical simulation", Physical Review E, vol. 51-2, 1035-1042.
12. Banks J.H. (2002), "Review of Empirical Research on Congested Freeway Flow",
Transportation Research Record, (1802), 225-232.
13. Batchelor, K.K. (2000), An introduction to fluid dynamics , Cambridge University Press.
14. Ben Akiwa M., de Palma A., Kanaraglou P. (1986), "Dynamic Model of Peak Period Traffic
Congestion with Elastic Arrival Rates", Transportation Science, 20, 164-181.
15. Ben Akiwa M., de Palma A., Kaisi I. (1991), "Dynamic network models and driver information
systems", Transportation Research, 25 A, 251-266.
16. Ben Akiva M., Darda D., Jha M., Koutsopoulos H., Toledo T. (2004), "Calibration of
Microscopic Traffic Simulation Models with Aggregate Data", Proceedings of the 83rd
annual
meeting TRB, Washington, D. C.
17. Benzoni- Gavage S., Colombo R.M. (2003), "An n-populations model for traffic flow",
European Journal of Applied Mathematics, 14, No 5, 587-612.
18. Brockfeld E., Kühne R. D., Wagner P. (2004), "Calibration and validation of microscopic traffic
flow models", Proceedings of the 83rd
annual meeting TRB, Washington, D. C.
19. Bolis S., Maggi R. (1998), "Adaptive Stated Preference Analysis of Shiers’ Transport and
Logistics Choice", Paper presented at the 38th ERSA Conference, Vienna.
20. Boyer K.D. (1977), "Minimum rate regulation, modal split sensitivities, and the railroad
problem", Journal of Political Economy, 85, 493-512.
21. Brackstone M. (2003), "Driver Psychological Types and Car Following,Is There a Correlation?"
Results of a Pilot Study, 6.
22. Braden J.B., Kolstad C.D. (eds) (1991), Measuring the Demand for Environmental Quality,
Elsevier, Amsterdam.

This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina4
7
23. Camus R., Longo G., Santorini F. (1995), "La distribuzione delle velocità nel flusso
autostradale, elemento indicatore del differente comportamento dell’utenza nei modelli di
previsione a breve termine", IV Congresso nazionale SIDT, Torino.
24. Cascetta E., Nuzzolo A. (1982), "Analisi statistica del processo delle velocità in autostrada",
Autostrade, anno XXIV, n. 6.
25. Cascetta E. (1990), Metodi quantitativi per la Pianificazione dei Sistemi di Trasporto, CEDAM,
Padova.
26. Cascetta E., Cantarella G.E. (1991), "A day-to-day and within-day dynamic stochastic
assigment model", Transportation research, 25A, 277-291.
27. Cascetta E. (2006), Modelli per i Sistemi di Trasporto, Teoria e Applicazioni, UTET editore.
28. Chandler R.E., Herman R., Montroll E.W. (1958), "Traffic dynamics, studies in car following",
Operations Research, 6, 165-184.
29. Chorin, A.J., Marsden, J.E. (1993), A mathematical introduction to fluid mechanics, Third
Edition, Springer-Varlag.
30. Chu L., Liu H. X., Oh J. S., W. Recker (2004), "A Calibration Procedure for Microscopic
Traffic Simulation", Proceedings of the 83rd
annual meeting TRB, Washington, D. C.
31. Davis L.C. (2003), "Modifications of the optimal velocity traffic model to include delay due to
driver reaction time", Physica A 319, 557 – 567.
32. Daganzo C.F., Cassidy M.J., Bestini R.L. (1999), "Possible explanations of phase transitions in
highway traffic", Transportation Resarch Part A 33, 365-379.
33. Duderstadt James J., Martin William R., Transport theory, cap. 4, "The derivation of continuum
description from trasport equations", New York, Wiley-Interscience Publications, 1979.
34. Edie L.C. (1960), "Car following and steady state theory for non-congested traffic", Operations
Research, vol. 9, 66-76.
35. Espié S. (1995), "ARCHISIM, Multi-actor parallel architecture for traffic simulation"
Proceedings of the Second World Congress on Intelligent Transport Systems, Vol IV,
Yokohama.
36. Espié S. (2002), "Aroche multi-acteur dans la simulation de trafic automobile", in: Organisation
et applications des SMA", Chapitre 10, Mandiau, Grislin-Le Strugeon et Péninou (Eds.), Paris,
Hermès.
37. Fancher P.S., Bareket Z. (1998), "Evolving Model for Studying Driver-Vehicle System
Performance in Longitudinal Control of Headway", Transportation Research Record 1631,
TRB, National Research Council, Washington D.C., 13-19.
38. Ferrarese M. (2012), "La linea ferroviaria Rovigo-Chioggia – Analisi della Domanda",
Transmitworld, 1-146.
39. Ferrari P., Giannini F. (1980), Ingegneria Stradale, Vol. I, ISEDI, Milano.
40. Ferrari P. (1988), "The reliability of the motorway transport system", Trasportation Research,
22B, 4, 291-310.
41. Ferrari P. (1988), "Un modello di simulazione per l’analisi del comportamento dei conducenti in
autostrada", Atti del convegno AIRO, Pisa.
42. Ferrari P. (1989), "The effect of driver behaviour on motorway reliability", Transportation
Research, 23B, 2, 139-150.
43. Ferrari P. (1990), "Control strategies for increasing motorway capacity", 273-278.
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina4
8
44. Florio L., Mussone L. (1995), "Freeway section capacity for different meteorological conditions
using neural network", 7th
WCTR, World Conference on Transportation Research, 19-23 July,
Sydney, Australia.
45. Forbes G.J., Hall F.L. (1990), "The alicability of catastrophe theory in modelling freeway traffic
operations", Transportation Research, 24A, 5, 335-344.
46. Fowkes T., Nash C.A., Tweddle G. (1991), "Investigating the market for inter-modal freight
technologies", Transportation Research, Part A, 25A (4) 161-172.
47. Garavello M., Piccoli B. (2006), Traffic flow on network, Applied Math Series, vol. 1,
American Institute of Mathematical Sciences, 12, 15, 16, 17, 20, 59.
48. Gazis D.C., Herman R., Potts R.B. (1959), "Car following theory of steady state traffic flow"
Operations Research, vol. 7, 499-505.
49. Gazis D.C., Herman R., Rothery R.W. (1961), "Nonlinear follow the leader models of traffic
flow", Operations Research, 9, 545-567.
50. Garavello M., Piccoli B., (2006), "Traffic flow on network", Alied Math Series, vol. 1,
American Institute of Mathematical Sciences, 12, 15, 16, 17, 20, 59.
51. Gaudry M., Duclos L-P., Dufort F., Liem T. (1993), Trio reference manual, version 1.0, CRT-
903, Centre de Recherche sur les Transports, Montreal.
52. Gazis D.C., Herman R., Montroll E.W., Rothery R. W. (1961), "Nonlinear follow-the-leader
models of traffic flow", Operations Research 9, 545-560.
53. Gis P.G. (1981), "A behavioural car-following model for computer simulation", Transportation
Research-B, 15, 105–111.
54. Greenshields B.D. (1935), "A study of highway capacity", Proceedings Highway Research
Record, Volume 14, 448-477, Washington.
55. Greenshields B.D. (1933), "The Photographic Method of studying Traffic Behaviour",
Proceedings of the 13th
Annual Meeting of the Highway Research Board.
56. Hall F.L., Agyemang-Duah, K. (1991), "Freeway capacity drop and the definition of capacity",
Transportation Research Record 1320, TRB, National Research Council, Washington DC.
57. HCM, Highway Capacity Manual, Special Report 209, Third Edition, Transportation Research
Board, Washington D.C. 1998.
58. Helly W. (1959), "Simulation of Bottlenecks in Single Lane Traffic Flow", in: Proceedings of
the Symposium on Theory of Traffic Flow, Research Laboratories, General Motors. New York,
Elsevier, 207-238.
59. Hoffman E.R., Mortimer R.G. (1996), "Scaling of Relative Velocity Between Vehicles",
Accident Analysis and Prevention, Vol. 28, No, 4, July, 415-421.
60. Hoogendoorn S. P., Ossen S. (2005), "Static and Dynamic Parameter Estimation and Analysis
of Car-Following Models", International Symposium on Transportation and Traffic Theory,
Maryland, USA, Elsevier.
61. Hoogendoorn S., Hoogendoorn R. (2010), "A Generic Calibration Framework for Joint
Estimation of Car Following Models using Microscopic Data", TRB 2010 Annual Meeting CD-
ROM, 17.
62. Horowitz J.L. (1984), "The stability of stochastic equilibrium in a two-link transportation
network", Transportation Research, 18B.
63. Jha M., Goplan G., Garms A., Mahanti B.P., Toledo T., Ben Akiva M. (2004), "Development
and calibration of a large scale microscopic traffic simulation model", TRB Annual Meeting.
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina4
9
64. JTEP (1988), Journal of Transport Economics and Policy, Vol. XXII (1).
65. Karasan O.E., Pinar M.C., Yaman H. (2001), The robust shortest path problem with interval
data, Bilkent University, Ankara, Turkey.
66. Kesting A., Treiber M., Helbing D. (2006; 2010), "Enhanced intelligent driver model to access
the impact of driving strategies on traffic capacity", Physica A 360, 71–88.
67. Kometani E., Sasaki T. (1959), "Dynamic behaviour of traffic with a nonlinear spacing-speed
relationship", in: Proceedings of the Symposium on Theory of Traffic Flow, Research
Laboratories, General Motors. New York, Elsevier, 105-119.
68. Koshi M., Iwasaki M., Ohkura I. (1983), "Some findings and an overview on vehicular flow
characteristics", Proceedings of the 8th
International Symposium on Transportation and Traffic
Therory,Toronto,.
69. Kroes E.P., Sheldon R.J. (1988), "Stated preference methods, an introduction", Journal of
Transport Economics and Policy, 22 (1) 11-25 May A. (1990), Traffic Flow Fundamentals,
Prentice Hall, N.Y.
70. Kühne R., Michalopoulos P. (1992), "Continuum Flow Models" in: Traffic Flow Theory – a
State-of-the-Art-Report, Transportation Research Board,.
71. Kundu P.K., Cohen I.M. (2004), Fluid Mechanics , Third Edition, Elsevier Academic Press.
72. Levin I.P., Louviere J.J., Schepanski A.A., Norman K.L. (1983), "External validity tests of
laboratory studies of information integration", Organisational Behavior and Human
Performance, 31, 173-193.
73. Lamb H. (1945), Hydrodynamics, Sixth Edition, Dover Publications.
74. Landau L.D., Lifshitz E.M. (1987), Fluid Mechanics, Volume VI of Course of Theoretical
Physics, Second Edition, Pergamon Press.
75. Litgthill M.J., Whitham J.B. (1955), "On kinematic waves, I, Flow movement in long rivers, II,
A theory of traffic flow on long crowded roads", Proceedings of the Royal Society, Series A,
Volume 229, 281-345, London.
76. Liu R., Van Vliet D., Watling D.P. (1995), "DRACULA, Dynamic route assignement
combining user learning and microsimulation", PTRC, vol. E, 143-152.
77. May A.D., Keller H.M., "Evaluation of single and two regime traffic flow models", Proceedings
of the 3rd
International Symposium on Transportation and Traffic Theory, Karlsruhe, 1968; in:
Kim Y., Keller H. (2001), "Zur Dynamik zwischen Verkehrszuständen im
Fundamentaldiagramm", S. 433-442, Straßenverkehrstechnik 9.
78. Menneni S., Sun C.P.D., Vortisch P. (2008), "An Integrated Microscopic and Macroscopic
Calibration for Psycho-Physical Car Following Models", TRB 2009 Annual Meeting CD-ROM,
17.
79. Michaels R.M. (1963), "Perceptual factors in car following", in: Proceedings of the Second
International Symposium on the Theory of Road Traffic Flow. Paris, OECD, 44-59.
80. Miller A.J. (1960), "Traffic flow treated as a stochastic process", Proceeding of the 1st
International Symposium on the Theory of Traffic Flow, Elsevier, Amsterdam.
81. Musolino G., Vitetta A. (1995), "Il condizionamento dei veicoli in autostrada", Atti del 2°
seminario "Rilievi e modellizzazione del traffico veicolare", Dipartimento di Ingegneria dei
Trasporti, Università degli Studi di Napoli, Napoli.
82. Mussone L. (1994), "Valutazione delle curve di deflusso autostradali in differenti condizioni
meteorologiche e di composizione del flusso veicolare con Reti Neurali Artificiali", Proceeding
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina5
0
1st
National Conference on Application of Artificial Intelligence Techniques in Engineering,
Napoli, 5-7 Ottobre.
83. Newell G.F. (2002), "A Simplified Car-following Theory – A Lower Order Model",
Transportation Research B 36, 195-205.
84. Punzo V., Simonelli F. (2005) "Analysis and Comparison of Microscopic Traffic Flow Models
Using Real Traffic Microscopic Data", Transportation Research Record 1934, 53-63, TRB,
Washington D.C.
85. Quartapelle L., Auteri, F. (2013), Fluidodinamica incomprimibile, Casa Editrice Ambrosiana.
86. Ranjitkar P., Nakatsuji T., Asano M. (2004), "Performance evaluation of microscopic traffic
flow models using test track data", Proceedings of the 83rd
annual meeting TRB, Washington,
D. C.
87. Riccardi G., Durante D. (2006), Elementi di fluidodinamica , Springer-Varlag.
88. Osaki H. (1993) "Reaction and anticipation in the Car-Following Behavior", in: Proceedings of
the 12th
International Symposium on the Theory of Traffic Flow and Transportation.
89. Olson R. et al. (2009), "Driver distraction in commercial vehicle operations. ", Center for Truck
and Bus Safety, Virginia Tech Transportation Institute, Blacksburg VA, 285.
90. Ossen S., Hoogendoorn S.P. (2088), "Validity of trajectory-based calibration aroach of car-
following models in presence of measurement errors", Transportation Research Record, 117-
125.
91. Oum T.H., Waters II W.G., Yong J.S. (1992), "Concepts of price elasticities of transport
demand and recent empirical estimates, an interpretative survey", Journal of Transport
Economics and Policy, 26 (2), 139-54.
92. Panwai S., Dia H. (2005), "Comparative evaluation of microscopic car-following behavior",
IEEE Transactions on intelligent transportation systems, 6(3), 314-325.
93. Polak J., Jones P. (1997), "Using stated-preference methods to examine traveller preferences
and responses" in: Stopher P.R., Lee-Gosseling M.E.H., (eds) Understanding Travel Behaviour
in an Era of Change, Oxford, Pergamon Press.
94. Prigogine I., Herman R., Anderson R. (1962), "On Individual and Collective Flow", Académie
royale de Belgique, Bulletin de la Classe des Sciences, 5ème
série, tome XLVIII, 792-804.
95. Prigogine I., Herman R. (1971), Kinetic theory of vehicular traffic, Elsevier, Amsterdam.
96. Ponzlet M. (1996), "Auswirkungen von systematischen und umfeldbedingten Schwankungen
des Geschwindigkeitsverhaltens und deren Beschreibung in Verkehrsflussmodellen, Heft 16 der
Schriftenreihe des Lehrstuhls für Verkehrswesen der Ruhr-Universität Bochum.
97. Ranjitkar P., Nakatsuji T. (2010), "A trajectory based analysis of drivers’ response in car
following situations", TRB 2010 Annual Meeting CD-ROM, 21.
98. Saad F. (1995), "Contribution des techniques d'observation et de verbalisation à l'analyse
psychologique de l'activité , études de cas dans le domaine de la conduite automobile", in: Actes
du GERRA, Journée d'étude "l'analyse des verbalisations d'opérateurs en situation de travail".
99. Schultz G.G., Rilett L.R. (2004), "Analysis of Distribution and Calibration of Car-Following
Sensitivity Parameters", in: Microscopic Traffic Simulation Models, 11.
100. SISTM (2003), A Motorway Simulation Model. Leaflet LF2061. TRL Limited.
101. Siuhi S., Kaseko M. (2010), "Parametric study of stimulus-response behavior for car-following
models", TRB 2010 Annual Meeting CD-ROM.
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina5
1
102. Stopher P. (1998), "A review of separate and joint strategies for the use of data on revealed and
stated choices", Transportation, 25, 187-205.
103. Swait J., Louviere J. (1993), "The Role of the Scale Parameter in the Estimation and
Comparison of Multinomial Logit Models", Journal of Marketing Research, 30, 305-314.
104. Toledo T. (2003), Integrating Driving Behavior, PhD Dissertation.
105. Toledo T., Koutsopoulos H.N., Davol A., Ben-Akiva M.E., Burghout W., Andréasson I.,
Johansson T., C. Lundin (2003), "Calibration and Validation of Microscopic Traffic Simulation
Tools, Stockholm Case Study", Proceedings of the 82rd
annual meeting TRB, Washington, D. C.
106. Torrieri V. (1998), Rilievi e modellizzazione del traffico veicolare, Franco Angeli, Milano.
107. Torrieri V., Gattuso D., Vitetta A. (1994), "La distribuzione spaziale del traffico veicolare su
un tronco autostradale", Atti del III Convegno S.I.D.T., Roma.
108. Torrieri V., Gattuso D., Vitetta A. (1995), "Density and conditioning characteristics of
motorway vehicular traffic flow", Proceeding of AATT Conference, Capri.
109. Torrieri V., Gattuso D. (1995), "Densità e livelli di servizio in autostrade a due e tre corsie per
carreggiata", Atti del IV Convegno S.I.D.T., Roma.
110. Treiber M., Hennecke A., Helbing D. (2000), "Congested traffic states in empirical
observations and microscopic simulations", Physical Review, vol. 62-2, 1805–1824.
111. Treiber M., Kesting A., Helbing D. (2006; 2010), "Delays, inaccuracies and anticipation in
microscopic traffic models", Physica A 359, 729–746.
112. Treiterer J., Myers J.A. (1974), "The Hysteresis Phenomena in Traffic Flow", Proceedings of
the 6th
International Symposium on Transportation and Traffic Flow Theory, 13-38.
113. Underwood R. T. (1961), "Speed, Volume, and Density Relationships, Quality and Theory of
Traffic Flow", Yale Bureau of Highway Traffic, 141–188.
114. Wang J., Liu R., Montgomery F. (2005), "A car following model for motorway traffic",
Proceedings of the 84th
annual meeting TRB, Washington, D. C.
115. Wardmam M. (1988), "A comparison of revealed and stated preference models of travel
behaviour", Journal of Transport Economics and Policy, Vol. XXII, 1, 71-92.
116. Wardrop J.G., Charlesworth G. (1954), "A method of estimating speed and flow traffic from a
moving vehicle", Proceedings of the Institution of Civil Engineers, Part II, February.
117. White F.M. (2001), Fluid Mechanics , Fourth Edition, Mc Graw Hill.
118. Wiedemann R. (1974), "Simulation des Strassenverkehrsflusses", Schriftenreihe des Institutes
für Verkehrswesen der Universität Karlsruhe.
119. Wiedermann R. (1974), "Simulation des Strassenverkehrsflusses", Schriftenreihe des Instituts
für Verkehrswesen der Universität Karlsruhe, Band 8, Karlsruhe, Germany.
120. Yang Q., Koutsopoulos H.N. (1996), "A microscopic traffic simulator for evaluation of
dynamic traffic management systems", Transportation Research Part C, vol. 4, 113–129.
121. Zackor H., Kühne R., Balz W. (1988), "Untersuchungen des Verkehrsablaufs im Bereich der
Leistungsfähigkeit und bei instabilem Fluß", Forschung Straßenbau und
Straßenverkehrstechnik, Heft 524, Bundesministerium für Verkehr, Bonn.

This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina5
2
Figure
Figura 1. Relazione velocità, flusso, densità. Andamento delle curve f(k), v(k).
Figura 2. Relazione velocità, densità. Andamento delle curve v-k nel modello di Greenberg (1959).
Figura 3. Follow the leader rappresentazione
Figura 4. Follow the leader schema
Figura 5. Follow the leader dinamica
Figura 6. Follow the leader velocità contro tempo
Figura 7. Follow the leader accelerazione contro tempo
Figura 8. Lane Change
Figura 9. Tavola delle velocità legali, degli spazi e tempi d’arresto, in condizioni di tempo normali
e per veicoli a norma di legge
Figura 10. Rappresentazione grafica delle polinomiali spazio/temporali con le equazioni di
previsione e bontà di fitting
Figura 11. Rappresentazione grafica della polinomiale veicoli/velocità
Figura 12. Rappresentazione grafica delle polinomiali veicoli/spazi/velocità
Figura 13. Rappresentazione grafica della propensione al rischio. Sensitività di e Wvita .
prevalenza delle alternative
Figura 14. Gli algoritmi della tavola dei parametri di conto MPCA
Figura 15. Gli algoritmi della tavola dei parametri di conto MPCA. Application
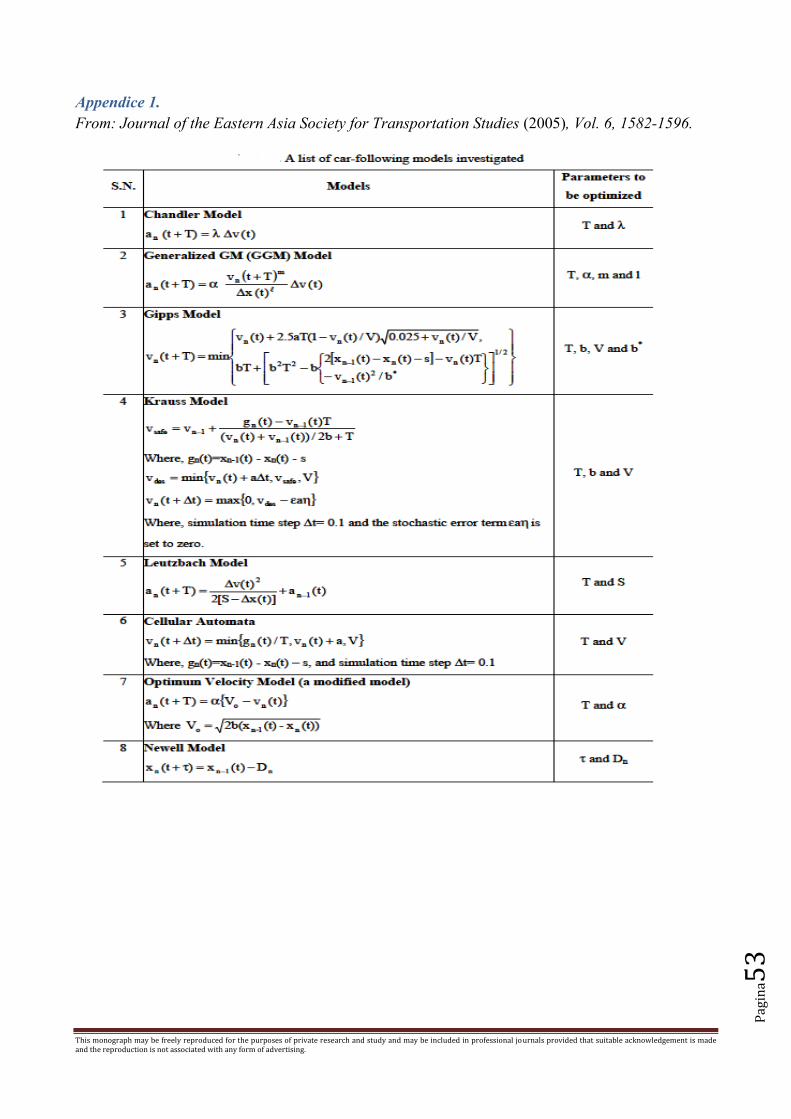
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina5
3
Appendice 1.
From: Journal of the Eastern Asia Society for Transportation Studies (2005), Vol. 6, 1582-1596.
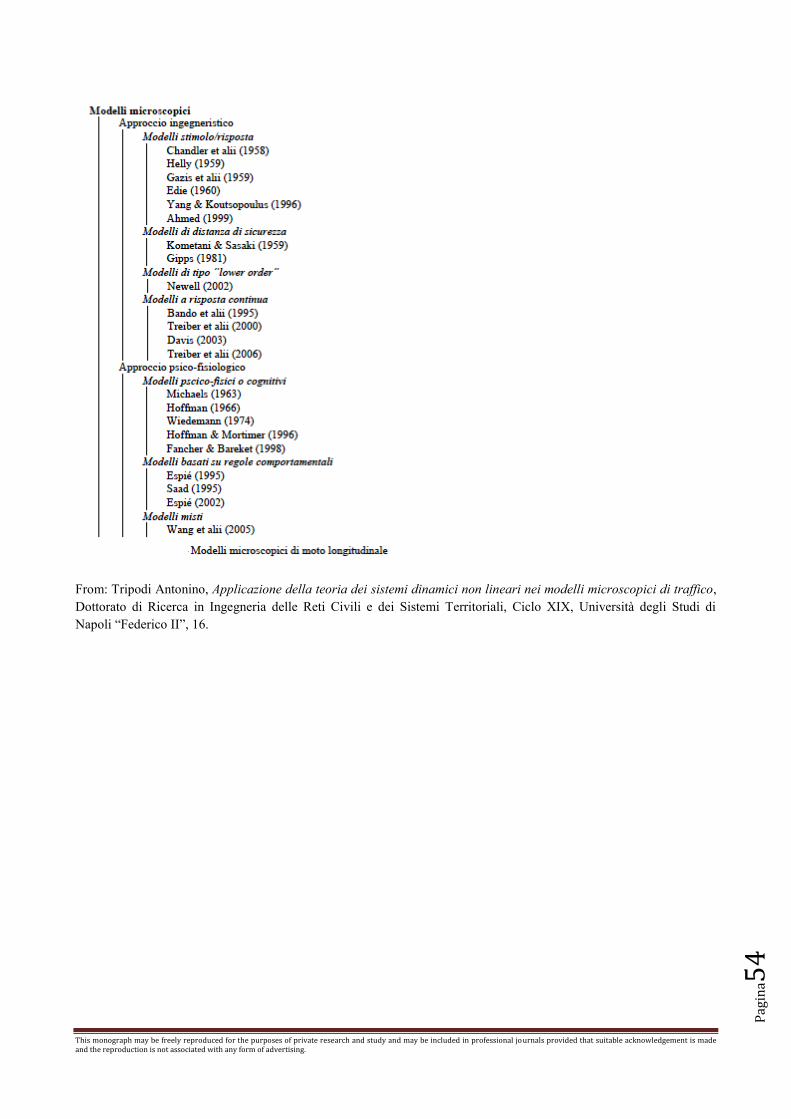
This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina5
4
From: Tripodi Antonino, Applicazione della teoria dei sistemi dinamici non lineari nei modelli microscopici di traffico,
Dottorato di Ricerca in Ingegneria delle Reti Civili e dei Sistemi Territoriali, Ciclo XIX, Università degli Studi di
Napoli “Federico II”, 16.

This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina5
5
Appendice 2.
Il Reddito Operativo RO rappresenta il risultato economico, al lordo degli oneri finanziari, degli
effetti delle poste straordinarie e di quelle accessorie, oltre che delle imposte, dell’attività tipica di
un’impresa ed è quantificato dai ricavi operativi (fatturato) meno i costi operativi.
Suddividendo i costi operativi in costi variabili CV e costi fissi CF, in relazione alle quantità
prodotte e vendute, si può ottenere la successiva formulazione del RO:
Fatturato
- Costi Variabili
Margine di Contribuzione
- Costi Fissi
Reddito Operativo
Il Margine di Contribuzione MC rappresenta la quantità di ricavi destinati alla copertura dei costi
fissi CF.
la Leva Operativa LO è l’espressione di elasticità del RO rispetto al fatturato F e quantifica la
variazione che subirà il RO in percentuale a fronte di una variazione percentuale nelle quantità
vendute. Si formula come:
F
FRO
RO
F
ROLO
%
%
Una variazione percentuale di queste quantità determina la medesima variazione nel fatturato a
prezzi di vendita costanti al variare delle quantità vendute, quando le quantità prodotte vengono
interamente vendute.
La variazione assoluta del RO è pari alla variazione assoluta del MC, in quanto la differenza tra le
due grandezze è rappresentata dalla costante dei costi fissi.
La variazione del MC può anche venire scritta come:
F
MdCFMdC
per giungere a una formulazione della LO:
RO
MdC
FF
ROF
MdCF
F
FRO
MdC
F
FRO
RO
LO
Break even point: volume di ricavi da tariffe al quale l’organizzazione non guadagna e non perde, in
quanto i ricavi derivanti dalle ricavi da tariffe e i costi si equivalgono. BEP = Costi Fissi/(1-Costi
Variabili/Ricavi da tariffe) = (Ricavi da tariffe * Costi Fissi)/(Ricavi da tariffe - Costi Variabili).

This monograph may be freely reproduced for the purposes of private research and study and may be included in professional journals provided that suitable acknowledgement is made and the reproduction is not associated with any form of advertising.
Pag
ina5
6
Grado di leva operativa/rischio economico: indice che misura l’effetto della variazione del volume
delle ricavi da tariffe sul reddito operativo. Grado di leva operativa = (ricavi da tariffe - costi
variabili)/reddito operativo = (ricavi da tariffe - costi variabili)/(ricavi da tariffe - costi totali).
Capacità produttiva di pareggio: rappresenta l’indice di sforzo economico che l’organizzazione
deve sostenere per ripianare i costi fissi (particolarmente quelli d’impianto). C.P.P. = ((Costi
Fissi/Ricavi Lordi-Costi Variabili).
Ringraziamenti
Ringrazio gli amici e colleghi del centro di ricerca Transmit dell’Università degli Studi di Verona - chiuso da poco - di cui sono stato il direttore scientifico, per la visura
critica dell’articolo e in particolare il dottor Giuseppe “Pino” Cirillo, il professore ingegnere Salvatore Montaperto e il professore ingegnere Giovanni Saccà, come pure
la dottoressa Tatiana Gennadievna Badina che ha curato con me l’impostazione editoriale, l’analisi dei grafici e il controllo degli algoritmi. Ringrazio il mio studente
Pietro Rossi per avermi aiutato a reperire i dati autostradali.
Un pensiero particolare a mons. professore Aleardo Rodella, co-fondatore dell’Università degli Studi di Verona, che mi ha sempre offerto, in tutti questi anni, un preciso
destino.