-
7/27/2019 DR Teaching (1L5000D E 4)
1/234
Contents 1
Contents
Chapter 1 Quick Instruction Reference
Chapter 2 Instructions for Robot Motions
Positioning (P) - Defining the Position and Attitude
-............................................................................................
2-1
Quick Positioning (Q) - Defining the Position and Attitude for
Quick Motion -
........................................................................2-4
Overview of Quick Positioning
Motion................................................................................................................2-4
Short Cut
Types..................................................................................................................................................2-6
Setting by
Level...............................................................................................................................................2-6
Setting by
Rate................................................................................................................................................2-8
Setting by
Length............................................................................................................................................2-9Linear
Interpolation (L) - Moving the Robot in a Straight Line
-..........................................................................2-11
Linear Interpolation Associated with Attitude Rotation (LO) -
Rotating the Attitude
-.......................................2-14
High Speed Linear Interpolation (L') - Moving the Robot in a
Straight Line Quickly
-........................................2-15
Circular Interpolation (C1/C2) - Moving the Robot along an Arc
-......................................................................2-16
Circular Interpolation Associated with Attitude Rotation
(CO1/CO2) - Rotating the Attitude -
.........................2-18
High Speed Circular Interpolation (C1'/C2') - Moving the Robot
along an Arc Quickly -................................2-19
Timer Wait (T) - Stopping the Robot for a Period of a Set Time
-......................................................................2-20
No Operation (NOP) - Enabling the Robot to Do Nothing
-..................................................................................2-20
Program End (END) - Ending the Program
-.....................................................................................................2-21
Chapter 3 Branch Instructions
Internal J ump - J umping to Any Position in the Program
-...................................................................................3-1
Internal J ump
(JP)...............................................................................................................................................3-1
Point Mark
(PM)..................................................................................................................................................3-2
Defining and Decrementing the Counter
Value..................................................................................................
3-2
Define Counter Value
(DEF)...........................................................................................................................3-2
Decrement Counter Value
(DEC)...................................................................................................................3-3
Internal J ump
Examples.....................................................................................................................................3-3
Specifying the State of an External Input Signal as a
Condition.....................................................................3-3
Specifying a Counter as a
Condition...............................................................................................................3-3
Call Program (CL) - Calling Another Program -
...................................................................................................3-7
Call
Operation.....................................................................................................................................................3-7
Specifying a Task Program to Be
Called............................................................................................................3-8
Specifying
Directly...........................................................................................................................................3-8
Specifying by means of an External
Input.......................................................................................................3-8
Specifying by means of an General-Purpose
Register..................................................................................
3-8
J ump to Program (J F) - J umping to Another Program -
....................................................................................3-12
J ump
Operation................................................................................................................................................3-12
Specifying a J ump Destination Task
Program..................................................................................................3-13Specifying
Directly.........................................................................................................................................3-13
Specifying by means of an External
Input.....................................................................................................3-13
-
7/27/2019 DR Teaching (1L5000D E 4)
2/234
2 Contents
Specifying by means of an General-Purpose
Register................................................................................3-13
Skip (SKS/SKE) - Stopping the Execution to J ump to a Specified
Position -
....................................................3-17
Structured Description (IF/EIF/ELS/FI) - Branching in the
IF-THEN-ELSE Form -.......3-20
What Are the Structured Description
Instructions?...........................................................................................3-20
Explanation of the Structured Description Instructions
.....................................................................................3-21
Task Program Examples Using the Structured Description
Instructions..........................................................3-23
Description Example
1..................................................................................................................................3-23Description
Example
2..................................................................................................................................3-23
Chapter 4 Welding Instructions
Outline of Welding Instructions
...............................................................................................................................4-1
Use of Welding Instructions
................................................................................................................................4-1
Basic Knowledge about Arc Start/End Instructions
............................................................................................4-2
Welding
Conditions.........................................................................................................................................4-2
Setting Arc Start
Conditions............................................................................................................................4-3Arc
Retry
Conditions...........................................................................................................................................4-4
Arc Start/End (AS/AE) - Starting/Ending Welding
-..............................................................................................4-6
Inch/Retract (ICH/RTC) - Inching/Retracting the Wire
-.....................................................................................4-12
Gas ON/OFF (GS/GE) - Turning the Gas ON/OFF
-.......................................................................................4-13
Continuous Tack Welding (ASS/AES) - Performing Continuous Tack
Welding - ...........................................4-14
Continuous Tack Welding
Operation................................................................................................................4-15
Differences between Continuous Tack Welding and Normal Welding
Operations..........................................4-16
Welding User
Parameters.................................................................................................................................4-16
TIG Pulsed Welding (ASP/AEP) - Performing Quality TIG Welding
-..............................................................4-19
TIG Pulsed
Welding..........................................................................................................................................4-19
Pulse Control in TIG Pulsed
Welding................................................................................................................4-20
Pules
Waveform............................................................................................................................................4-22
Output Timing of the Filler Feed Rate
Command.........................................................................................4-22
Preheating and Slow-Up
Stages...................................................................................................................4-23
Slow-Down and Welding Finishing
Stages...................................................................................................4-24
Delay Time of Filler Feed Start in the Slow-Up
Stage..................................................................................4-26
Advance Time of Filler Feed End in the Slow-Down
Stage..........................................................................4-26
Synchronizing Pulses with Weaving
[Synchro-TIG].......................................................................................4-27
Pulse Waveform in Synchro-TIG
..................................................................................................................4-27
Pulse-Weaving Phase Adjusting
Time.........................................................................................................4-30
Controlling the Pulse Output by Welding Power
Supply...................................................................................4-31Teaching
for TIG Pulsed
Welding.....................................................................................................................4-32
Creating Condition Files for TIG Pulsed
Welding.............................................................................................4-39
The TIG Pulsed Welding Section During Automatic
Operation........................................................................4-42
Operation at the Time of Emergency
Stop...................................................................................................4-42
Operation at the Time of
Halt........................................................................................................................4-42
Operation at the Time of
Restart...................................................................................................................4-42
Operation at the Time of Switching between Weld
ON/OFF........................................................................4-42
Changing
Conditions.....................................................................................................................................4-43
Online
Modification........................................................................................................................................4-44
Setting the User Parameters Relating to TIG Pulsed
Welding.........................................................................4-46
Wire Retracting at the Time of
Halt...............................................................................................................4-46
Wire Retracting at the Time of Emergency
Stop..........................................................................................4-46
Delay Time of Filler Feed Start in the Slow-Up
Stage..................................................................................4-46
-
7/27/2019 DR Teaching (1L5000D E 4)
3/234
Contents 3
Advance Time of Filler Feed End in the Slow-Down
Stage..........................................................................4-46
Arc Start/Arc End (ASD/AED) - Welding with the Instructions
Specialized for CPDRA-350/-500 - .....................4-48
Teaching
ASD/AED..........................................................................................................................................4-48
Creating Welding Condition Files for
CPDRA-350/-500...................................................................................4-54
Arc Start/Arc End (APS/APE) - Performing Pulsed MIG Welding by
CPDACA-200 -........................4-56
Relationship of Welding Modes and Welding Characteristic
Data...............................................................................4-56
Setting a Welding Process and Various
Conditions.........................................................................................4-58Creating
Welding Condition Files for
CPDACA-200.........................................................................................4-68
Welding Section in Automatic
Operation..........................................................................................................4-70
Operation at the Time of Emergency
Stop...................................................................................................4-70
Operation at the Time of
Halt........................................................................................................................4-70
Operation at the Time of
Restarting..............................................................................................................4-70
Changing
Conditions.....................................................................................................................................4-70
On-line
Modification.......................................................................................................................................4-70
Waveform Control Applied to Welding
Processes............................................................................................4-72
Waveform Control for DC Pulsed
Welding...................................................................................................4-72
Waveform Control for AC Pulsed
Welding...................................................................................................4-73Waveform
Control for DC Wave Pulsed
Welding.........................................................................................4-74
Waveform Control for AC Wave Pulsed
Welding.........................................................................................4-75
Chapter 5 Weaving Instructions
Fixed Pattern Weaving Start (WFP) - Weaving in a Fixed Pattern
-....................................................................5-1
Axis Weaving Start (WAX) - Weaving by Single J oint Shaking
-.........................................................................5-6
Weaving End (WE) - Ending Weaving
-.............................................................................................................5-9
Taught Weaving (WSF) - Teaching a Weaving Pattern
-..................................................................................5-10
Taught
Weaving................................................................................................................................................5-10
Conditions for Taught
Weaving.........................................................................................................................5-12
Operating Conditions for
Weaving................................................................................................................5-12
Teaching Points
............................................................................................................................................5-14
An Overview of the Operational
Procedures....................................................................................................5-17
Teaching for Taught Weaving by Using Procedure
A..................................................................................5-18
Teaching for Taught Weaving by Using Procedure
B..................................................................................5-24
Teaching for Taught Weaving by Using Procedure
C..................................................................................5-27
Checking and Modifying the Taught
Points......................................................................................................5-29
Chapter 6 External Control Input/Output Instructions
External Control Output (S/R) - Outputting a Signal
-.............................................................................................6-1
External Control Pulse Output (PLS/PLR) - Outputting a Signal
for a Fixed Period of Time - ...............................6-3
External Control Input Wait (N/F) - Waiting for a Signal Input
-..........................................................................6-5
Quick External Control Input Wait (NQ/FQ) - Checking an External
Input in Advance -.....................................6-6
Teaching a Set of S, N (or F), and
R.......................................................................................................................6-8
Clear Output Port (CLR) - Turning the Output Port OFF
-......................................................................................6-9
User Errors (ERR / ALM / INF) - Outputting User-Definable Errors
- ........................6-10
ERR (User-defined
ERROR)............................................................................................................................6-10ALM
(User-defined
ALARM).............................................................................................................................
6-11
INF (User-defined INFORMATION)
.................................................................................................................6-11
-
7/27/2019 DR Teaching (1L5000D E 4)
4/234
4 Contents
Chapter 7 General-Purpose Registers
Overview.................................................................................................................................................................7-1
Types of General-Purpose Registers and the Register
Monitor.............................................................................7-2
Types of General-Purpose Registers
.................................................................................................................7-2
Displaying the Values of the Registers [Register
Monitor]...............................................................................7-3
Group I/O
................................................................................................................................................................7-5
Group I/O GInn /
GOnn................................................................................................................................7-5
Local Group I/O LIn / LOn
..............................................................................................................................7-7
Instructions Relating to General-Purpose
Registers.............................................................................................7-10
Arithmetic Operation
Instructions......................................................................................................................
7-11
Increment by 1: INC
...................................................................................................................................7-11
Decrement by 1: DEC
................................................................................................................................7-11
ADDition :
ADD.............................................................................................................................................7-11
SUBtraction :
SUB.........................................................................................................................................7-11
MULtiplication:
MUL......................................................................................................................................7-11
DIVision :
DIV................................................................................................................................................7-12Remainder:
MOD..........................................................................................................................................7-12
LoaD:
LD.......................................................................................................................................................7-12
CLeaR registers:
CLR...................................................................................................................................7-12
Bit Operation
Instructions..................................................................................................................................7-16
Logical product:
AND....................................................................................................................................7-16
Logical sum:
OR............................................................................................................................................7-16
Logical negation: NOT
..................................................................................................................................7-16
Exclusive OR:
XOR.......................................................................................................................................7-16
Assign
Instruction..............................................................................................................................................7-19
General Input/Output
Instructions.....................................................................................................................7-21
General input instruction:
IN..........................................................................................................................7-21
General input instruction (INPUT WAIT ON):
INW.......................................................................................7-21
General output instruction: OUT
...................................................................................................................7-22
General output instruction (INPUT WAIT ON):
OTW...................................................................................7-22
Clear Output ports Instruction:
CLR..............................................................................................................7-23
Branch Instructions Using General-Purpose Registers as Branch
Conditions................................................7-30
Relational
Operators.....................................................................................................................................7-30
Logical
Operators..........................................................................................................................................7-30
-
7/27/2019 DR Teaching (1L5000D E 4)
5/234
Contents 5
Chapter 1 Quick Instruction Reference
Chapter 2 Instructions for Robot Motions
Chapter 3 Branch Instructions
Chapter 4 Welding Instructions
Chapter 5 Weaving Instructions
Chapter 6 External Control Input/Output Instructions
Chapter 7 General-Purpose Registers
-
7/27/2019 DR Teaching (1L5000D E 4)
6/234
Chapter 1Quick Instruction Reference
This chapter provides a list of instructions and brief
explanations of their functions, including the
keystrokes required to select (teach) them.
-
7/27/2019 DR Teaching (1L5000D E 4)
7/234
-
7/27/2019 DR Teaching (1L5000D E 4)
8/234
Quick Instruction Reference 1-1
The instructions you can select are listed below.
Note that the instructions marked with "*1" are not available on
DR CONTROL. (Available on DR CONTROL 2.)
In addition, the instructions marked with "*2" are optional and
are not available on the standard robot system. For
details about the optional instructions, see the instruction
manual "OPTION".
Table. 1. 1 List of Instructions
Instruction Description Explanation Key operation
Positioning Moves the robot to a taught point.
*1 Quick positioning Moves the robot to a taught point.
Linear interpolation Moves the robot to a taught pointalong a
straight line.
High speedlinear interpolation
Moves the robot to move to a taughtpoint along a straight line.
Possibleto set a speed higher than the L.
Linear interpolationwith rotation of theattitude
Rotates the torch to a taught point.The torch tip moves along
astraight.
Circular
interpolation(center point)
Moves the robot to a taught point
along an arc.
Circularinterpolation(end point)
Moves the robot to a taught pointalong an arc.
High speed circularinterpolation(center point)
Moves the robot to a taught pointalong an arc. Possible to set
aspeed higher than C1.
High speed circularinterpolation(end point)
Moves the robot to a taught pointalong an arc. Possible to set
aspeed higher than C2.
Circularinterpolation withrotation of theattitude(center
point)
Rotates the torch to a taught point.The torch tip moves along an
arc.
Circularinterpolation withrotation of theattitude
(end point)
Rotates the torch to a taught point.The torch tip moves along an
arc.
2
2
2
-
7/27/2019 DR Teaching (1L5000D E 4)
9/234
1-2 Quick Instruction Reference
Instruction Description Explanation Key operation
Starting weldingStarts welding with the setwelding
conditions.
Ending weldingEnds welding with the set craterconditions.
Inching the wire Inches the wire for the set time.
Retracting the wire Retracts the wire for the set time
Turning gas ON Starts the gas output.
Turning gas OFF Ends the gas output.
Starting
Tack weldingStarts tack welding with the setwelding conditions
and pitch.
Ending
Tack weldingEnds tack welding.
*1Starting TIG pulsedwelding Starts TIG pulsed welding.
*1Ending TIG pulsedwelding
Ends TIG pulsed welding.
2
2
2
2
2
3
3
-
7/27/2019 DR Teaching (1L5000D E 4)
10/234
Quick Instruction Reference 1-3
Instruction Description Explanation Key operation
Starting welding(specialized for
CPDRA-350/-500)
Starts welding with the setwelding conditions.
Ending welding(specialized forCPDRA-350/-500)
Ends welding with the set craterconditions.
Starting Pulsed MIGwelding
Starts Pulsed MIG welding byusing CPDACA-200.
Ending Pulsed MIGwelding
Ends Pulsed MIG welding byusing CPDACA-200.
2
3
3
-
7/27/2019 DR Teaching (1L5000D E 4)
11/234
1-4 Quick Instruction Reference
Instruction Description Explanation Key operation
Starting Fixedpattern weaving
Starts fixed pattern weaving withthe set conditions.
*1Starting CompositeWrist Axis Weaving
Starts composite wrist axisweaving with the set conditions.
StartingAxis weaving
Starts axis weaving with the setweaving conditions.
Taught Weaving Starts taught weaving with the setconditions.
Ending weaving Ends weaving.
Setting externalcontrol output
Turns the specified output portON.
Resetting externalcontrol output Turns the specified output
portOFF.
Waiting for externalcontrol input ON
Waits the robot for the specifiedinput port to turn ON.
Waiting for externalcontrol input OFF
Waits the robot for the specifiedinput port to turn OFF.
Setting externalcontrol pulse output
Turns the specified output portON for a given time.
Resetting externalcontrol pulse output
Turns the specified output portOFF for a given time.
*1Quick ExternalControl Input ONWait
Reads during execution of thesequence prior to its
sequencewhether the specified signal isON or not.
*1Quick ExternalControl Input OFF
Wait
Reads during execution of thesequence prior to its
sequencewhether the specified signal isOFF or not.
3
3
-
7/27/2019 DR Teaching (1L5000D E 4)
12/234
Quick Instruction Reference 1-5
Instruction Description Explanation Key operation
Inputting I/O port toregister
Inputs the condition of any I/Oport to a register.
Waiting andinputting I/O port toa register
Waits the robot for an input at thespecified input port and
thenoutputs a value or register valueto any output port.
Outputting to I/Oport
Outputs a value or register valueto any I/O port.
Waiting andoutputting to aregister
Waits the robot for an input at thespecified input port and
thenoutputs a value or register valueto any output port.
Clearing outputports
Clears any general-purposeoutput port.
Waiting for timeStops the Task program run forthe set time.
No operation Causes no operation.
Point markIndicates the jump destination in
the Task program.
Internal jump(Unconditional)
Causes a jump to the specifiedpoint mark at all time.
NInternal jump(ON condition)
Causes a jump to the specifiedpoint mark if the specified
inputport is ON.
F Internal jump(OFF condition)
Causes a jump to the specified
point mark if the specified inputport is OFF.
CInternal jump(Counter condition)
Causes a jump to the specifiedpoint mark if the value of
thespecified counter is 0.
RegInternal jump(Register condition)
Causes a jump to the specifiedpoint mark if the result of
acomparison operation betweenregisters is true.
2
2
2
2
2
-
7/27/2019 DR Teaching (1L5000D E 4)
13/234
1-6 Quick Instruction Reference
Instruction Description Explanation Key operation
External jump(Unconditional)
Causes a jump to the specifiedTask program at all times.
NExternal jump(ON condition)
Causes a jump to the specifiedTask program if the specifiedinput
port is ON.
FExternal jump(OFF condition)
Causes a jump to the specifiedTask program if the specifiedinput
port is OFF.
CExternal jump(Counter condition)
Causes a jump to the specifiedTask program if the value of
thespecified counter is 0.
RegExternal jump(Register condition)
Causes a jump to the specifiedTask program if the result of
acomparison operation betweenregisters is true.
BCDExternal jump(BCD entry)
Causes a jump to the specifiedTask program being externallyinput
in the BCD code if thespecified input port is ON.
BINExternal jump(Binary entry)
Causes a jump to the specifiedTask program being externallyinput
in the Binary code if the
specified input port is ON.
Calling program(Unconditional)
Calls the specified Task programat all times.
NCalling program(ON condition)
Calls the specified Task programif the specified input port
ON.
FCalling program(OFF condition)
Calls the specified Task programif the specified input port
OFF.
-
7/27/2019 DR Teaching (1L5000D E 4)
14/234
Quick Instruction Reference 1-7
Instruction Description Explanation Key operation
CCalling program(Counter condition)
Calls the specified Task programif the value of the
specifiedcounter is 0.
RegCalling program(Register condition)
Calls the specified Task programif the result of a
comparisonoperation between registers istrue.
BCDCalling program(BCD entry)
Calls the Task program beingexternally input in the BCD code
ifthe specified input port ON.
BINCalling program(Binary entry)
Calls the Task program beingexternally input in the Binary
codeif the specified input port ON.
Setting countervalue
Sets the value of the counterused as a branch condition.
Decrementaloperation of countervalue
Decrements the value of thecounter used as branch conditionby
one.
Ending program Ends the Task program run.
-
7/27/2019 DR Teaching (1L5000D E 4)
15/234
1-8 Quick Instruction Reference
Instruction Description Explanation Key operation
IncrementAdds one to the value of thespecified register.
DecrementSubtracts one from the value ofthe specified
register.
AddingAdds the value or register valueto the register.
! Subtracting Subtracts the value or registervalue to the
specified register.
! MultiplyingMultiplies the specified registervalue by the value
or registervalue.
" DividingDivides the specified registervalue by the value or
registervalue.
Calculating areminder of division
Calculates a reminder of divisionof the specified register value
bythe value or register value.
Loading to theregister
Assigns the value of anotherregister to the specified
register.
Clearing the
registers
Clears the value of the specified
register.
Calculating thelogical product
Calculates the logical product ofregisters or a register and a
value.
3 2
3 2
3 2
3 2
3 2
3 2
3 2
3 2
3 2
3 2
-
7/27/2019 DR Teaching (1L5000D E 4)
16/234
Quick Instruction Reference 1-9
Instruction Description Explanation Key operation
Calculatingthe logical sum
Calculates the logical sum ofregisters or a register and a
value.
Calculatingthe logical NOT
Calculates the logical NOT ofregisters or a register and a
value.
Calculatingthe exclusive OR
Calculates the exclusive OR ofregisters or a register and a
value.
Register
assignment
Assigns a register to any output
port.
Err Outputs ERROR.
Alarm Outputs ALARM.
Information Outputs INFORMATION.
CommentAdds any comment in a Taskprogram.
Character Symbol
Replaces a Task instruction withany character string.Necessary
to define the userparameter.
3 2
3 2
3 2
3 2
3 2
3 2
3 2
3 2
3 2
-
7/27/2019 DR Teaching (1L5000D E 4)
17/234
1-10 Quick Instruction Reference
Instruction Description Explanation Key operation
NStartingthe Skip section(Skips when ON)
Indicates the start of a skipsection.
J umps to the skip end "SKE" ifthe specified skip input signal
isON.
FStartingthe Skip section(Skips when OFF)
Indicates the start of a skipsection.
J umps to the skip end "SKE" ifthe specified skip input signal
isOFF.
Endingthe skip section
Indicates the end of a skipsection.
Starting IF blockIndicates the start of an IF block.Defines an
IF statement.
Else if Defines an ELSE IF statement.
Else Defines an ELSE statement.
Ending IF block Indicates the end of an IF block.
3 2
3 2
3 2
4
3
4 3
4 3
4 3
-
7/27/2019 DR Teaching (1L5000D E 4)
18/234
Quick Instruction Reference 1-11
Instruction Description Explanation Key operation
*2
Positioning(Synchromotion orSimultaneouscontrol)
Moves multiple mechanisms to ataught point simultaneously.
*2
Quick positioning(Synchromotion orSimultaneouscontrol)
Moves multiple mechanisms to ataught point simultaneously.
*2
Linear interpolation(Synchromotion orSimultaneouscontrol)
Moves multiple mechanisms to ataught point simultaneously.
Thetorch tip of the manipulator movesalong a straight line.
*2
High speedlinear interpolation(Synchromotion or
Simultaneouscontrol)
Moves multiple mechanisms to ataught point simultaneously.
Thetorch tip of the manipulator moves
along a straight line. Possible toset a speed higher than the
HL.
*2
Linear interpolationwith rotation ofattitude(Synchromotion
orSimultaneouscontrol)
Moves multiple mechanisms to ataught point simultaneously.
The torch rotates and its movesalong a straight line.
*2
Circularinterpolation(Synchromotion orSimultaneous
control)
Moves multiple mechanisms to ataught point simultaneously.
Thetorch tip of the manipulator movesalong an arc.
*2
High speedcircular interpolation(Synchromotion
orSimultaneouscontrol)
Moves multiple mechanisms to ataught point simultaneously.
Thetorch tip of the manipulator movesalong an arc. Possible to set
aspeed higher than the HC.
*2
Circularinterpolation withrotation of attitude(Synchromotion
orSimultaneouscontrol)
Moves multiple mechanisms to ataught point simultaneously.
The torch rotates and its movesalong an arc.
*2Simultaneousuniform interpolation
Moves multiple mechanisms to ataught point simultaneously.
*2Uniforminterpolation
Moves the external axis withconstant velocity.
Select the external axis
2
2
Set the external axis as "MAIN MECHANISM".Move the cursor to
"MAIN INSTRUCTION".
-
7/27/2019 DR Teaching (1L5000D E 4)
19/234
1-12 Quick Instruction Reference
Instruction Description Explanation Key operation
*2StartingMulti-pass section
Indicates the start of a sectionwhere operations associated
withmultipass welding are repeated.
*2StartingMulti-pass section
Indicates the start of a sectionwhere operations associated
withmultipass welding are repeated.Possible to set a speed
higherthan the MPS.
*2EndingMulti-pass section
Indicates the end of a sectionwhere operations associated
withmultipass welding are repeated.
*2StartingMulti-pass welding
Starts welding for each pass withthe set welding conditions.
*2EndingMulti-pass welding
Ends welding for each pass withthe set crater conditions.
*2
Specifying
executing pass oftask instruction
Executes the Task instruction at
the specified pass duringmultipass welding.
*2StartingStitch pulse welding
Starts stitch pulse welding withthe set welding conditions
andpitch.
*2EndingStitch pulse welding
Ends stitch pulse welding with theafterflow for the set
time.
*2Calculatingrotated position
Updates the positional datawithout rotating the positioner.
*2 Shifting in relationMoves the slider from the by aspecified
distance.
*2 Setting the origin Sets the origin of the slider.
4
4
4
4
-
7/27/2019 DR Teaching (1L5000D E 4)
20/234
Quick Instruction Reference 1-13
Instruction Description Explanation Key operation
*2Starting
Twin synchromotionsection
Indicates the start of a twinsynchromotion section.
*2Ending
Twin synchromotionsection
Indicates the end of a twinsynchromotion section.
-
7/27/2019 DR Teaching (1L5000D E 4)
21/234
Chapter 2Instructions for Robot Motions
This chapter describes the instructions relating to motions of
the robot.
Contents
Positioning (P) - Defining the Position and Attitude
-............................................................................................
2-1
Quick Positioning (Q) - Defining the Position and Attitude for
Quick Motion
-........................................................2-4
Overview of Quick Positioning
Motion................................................................................................................2-4
Short Cut
Types..................................................................................................................................................2-7
Setting by
Level...............................................................................................................................................2-7
Setting by
Rate................................................................................................................................................2-9
Setting by
Length..........................................................................................................................................2-10
Linear Interpolation (L) - Moving the Robot in a Straight Line
-..........................................................................2-12
Linear Interpolation Associated with Attitude Rotation (LO) -
Rotating the Attitude
-.........................................2-15
High Speed Linear Interpolation (L') - Moving the Robot in a
Straight Line Quickly
-........................................2-16
Circular Interpolation (C1/C2) - Moving the Robot along an Arc
-......................................................................2-17
Circular Interpolation Associated with Attitude Rotation
(CO1/CO2) - Rotating the Attitude
-...........................2-19
High Speed Circular Interpolation (C1'/C2') - Moving the Robot
along an Arc Quickly -...................................2-20
Timer Wait (T) - Stopping the Robot for a Period of a Set Time
-......................................................................2-21
No Operation (NOP) - Enabling the Robot to Do Nothing -
...............................................................................2-21
Program End (END) - Ending the Program
-.....................................................................................................2-22
-
7/27/2019 DR Teaching (1L5000D E 4)
22/234
-
7/27/2019 DR Teaching (1L5000D E 4)
23/234
Instructions for Robot Motions 2-1
Positioning (P) - Defining the Position and Attitude -This
instruction allows the operator to store positions and attitudes of
the robot. The robot moves to the taught
position/attitude from the immediately preceding stored
position/attitude. Because the robot moves in the
easiest way that it moves, the locus of the torch tip does not
become a straight line.
The following conditions need to be set:
Speed
A speed is specified at a speed rate (which is a rate to the
maximum speed; 100 is the maximum.)
Each axis of the robot starts and stops synchronously with the
axis whose motion is the largest.
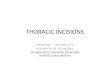
Overlap ON/OFF
Overlap is a process to move the robot from a taught point to a
taught point without reducing the speed.Overlap ON can shorten the
tact time.
Fig. 2. 1 Overlap ON/OFF
CAUTIONIMPORTANTTake care to avoid an interference with the
peripheral jigs when the overlap is set to ON.The tact time can be
reduced by setting Overlap ON. However, because there is a
differencebetween the path in automatic operation and the path
taught, take care to avoid interference withperipheral jigs.Also,
because the overlap process is not performed in block operation,
the robot may interfere witha jig in automatic operation even if
this does not happen in block operation.Set Overlap OFF if
interference with the jig is possible.
Overlap process may not be effective depending on the setting
speed and distance
Even if Overlap OFF is set, this setting may not be effective,
depending on the between the movingdistance and speed.
The Relation between the Overlap Effective Travel Distance and
Travel Speed
Overlap process
not in effect100
75
50
25
200 400 600 8000
Overlap process
in effect
Speed rate [%]
Travel distance per sequence [mm]
Fig. 2. 2
P
Overlap OFF (The taught path)
Overlap ON
-
7/27/2019 DR Teaching (1L5000D E 4)
24/234
2-2 Instructions for Robot Motions
Overlap process is not in effective depending on the taught
data.
Even if Overlap is set ON, the overlap process is not in
effective in the following conditions:
- When neither one of two consecutive sequences has Positioning
instruction (P, HP, or PM)
Example
001 P
002 P003 P004 L005 P: :
- When Input Wait instructions (N, F, INW, or OTW), Timer Time
Wait instruction (T), or NoOperation instruction (NOP) is taught
between two sequences
Example
001 P002 P003 P
N 001004 P
OperationTeaching the Positioning Instruction (P) Move the
robot, by manual manipulation, to the
position and attitude you want to teach.
Press key.
The following conditions will be displayed at
the function display area on the teach pendant.
F1 ... Speed: 75%, Overlap:ON
F2 ... Speed:100%, Overlap:ON
F3 ... Speed: 50%, Overlap:OFF
F4 ... Speed: 75%, Overlap:OFF
F5 ... Speed:100%, Overlap:OFF
You can set the conditions by selecting the function
key instead of the following procedure.
P
P
P
P
L
Overlap is in effect.
Overlap is not in effect.
Overlap is not in
P
P
P, N001
P
Overlap is in effect.
Overlap is not in effect.
001
002
003
004
005
001
002
003
004
-
7/27/2019 DR Teaching (1L5000D E 4)
25/234
Instructions for Robot Motions 2-3
If you want change the speed, enter the speed
by using numeric keys.
Set overlap ON/OFF, if necessary.
The default setting is ON. To change to OFF,
(1) Press key.
(2) Press F2 key (OFF).
Press key.
Now, the Positioning instruction "P" has been
stored.
-
7/27/2019 DR Teaching (1L5000D E 4)
26/234
2-4 Instructions for Robot Motions
Quick Positioning (Q) - Defining the Position and Attitude for
Quick Motion
-
Unlike the Positioning instruction (P), the Quick Positioning
instruction (Q) is used to move the robot without
accelerating and decelerating to reduce the execution time of
the positioning.
CAUTION
Not available on DR CONTROL
The Quick Positioning instruction (Q) is not available on DR
CONTROL.
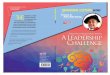
Overview of Quick Positioning MotionIt is necessary to specify
an amount of shortcut for the motion by the Q instruction (referred
to as Q motion in
the following) in place of overlap ON/OFF for the motion by the
P instruction (referred to as P motion in the
following).When an mount of shortcut is specified, the robot
will move to a shortcut point before the taught point in a
continuous quick positioning motion. (If the shortcut setting is
0, the robot will move to the taught point
without taking a shortcut path.)
Fig. 2. 3 Paths with the Overlap (P motion) / Shortcut (Q
motion) Settings
The user can select "level", "rate", or "length" to set an
amount of shortcut. (See the table below.)
Table 2. 1 The Ranges and Units of Shortcut Options
Shortcut Option Level Rate [%] Length [cm]
Range 0 - 10 0 - 50 0 - 99
when lap off (P motion), orwhen a mount of shortcut is 0 (Q
motion)
when lap off (P motion)
when a mount of shortcut is small (Q motion)
Taught point 3
Taught point 2A half of pathTaught point 1
when a mount of shortcut is large (Q motion)
nQ (level=n)
Q (level=0) Q (level=0)
Path A Path B
k %Q (rate=k%)
Q (rate=0%) Q (rate=0%)
Path BPath A
Q (length=Lcm)
k cm
Path A Path B
Q (length=0cm) Q (length=0cm)
-
7/27/2019 DR Teaching (1L5000D E 4)
27/234
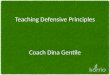
Instructions for Robot Motions 2-5
Fig. 2. 4 Level Fig. 2. 5 Rate Fig. 2. 6 Length
-
7/27/2019 DR Teaching (1L5000D E 4)
28/234
2-6 Instructions for Robot Motions
The table below shows the features of each shortcut option.
Select the option suitable for your application.
Table 2. 2 Features of Shortcut Options
OptionFeature
Level Rate Length
Shortcut is independent of the programmed coordinate system.
The shortcut path to the setting changes at a ratio of 1:1.
If the distance to an interfering object is known, the value
canbe directly entered.
Even if the teach speed is changed, the almost same path
isobtainable.
: Applicable : Not applicable
CAUTIONIMPORTANTA short cut may cause interference with a
jig.
Though tact time can be shortened by specifying an amount of
shortcut, this setting will cause adifference between the
programmed path and the path in automatic operation. Great care
isneeded to avoid interference with the peripheral jig. In
addition, remember that the robot does nottake a shortcut path (but
it moves to the taught point) in block operation. The robot may
interferewith the jig during automatic operation even if it does
not during block operation.
Changing the speed may cause the path to vary slightly.If the Q
motion speed is changed, the shortcut path may slightly change.
Teaching order to enable taking a short cut:
The shortcut is available only in the sequence of Q and Q, or HQ
and HQ. For example, this featureis not available in the sequence
of Q and P, Q and HQ, or Q and L.
(HQ is used to position multiple mechanisms at the same time,
and is available only for thesynchromotion or simultaneously
controlled system.)
Taking a short cut is not possible at the same point or in a
short distance.
The shortcut is not available if Q instructions are recorded at
the same point location or at a too shortdistance (of approximately
20 cm as a guide.)
The maximum amount of shortcut
The maximum amount of shortcut is half the path.
A selection of short cut options depends on the mechanism
configuration.
Remember that the shortcut may not be available, depending on
the mechanism type.
Table 2. 3 Shortcut Options Available for Mechanisms
Mechanism Level Rate Length
Tool-side manipulator
Work-side manipulator
Simultaneously controlledmechanism
Tool-side slider
Work-side slider/positioner
-
7/27/2019 DR Teaching (1L5000D E 4)
29/234
Instructions for Robot Motions 2-7
Short Cut Types
Setting by Level
In the "level" representation, the amount of motion between two
taught points (a start point and a target
point) is divided into portions and each portion is expressed as
an integer. An amount of shortcut is set by
entering this integer value.
The robot has the shortcut levels shown as below. Level 0
indicates a target point, and the robot takes a
shortcut from n before the target point.
Fig. 2. 7 Paths by Level
IMPORTANT
A guide to setting a level:
Though the number of levels depends on the distance and speed to
be programmed, as a guide,
three to five levels are for large positioning motion, and one
to two levels are for small positioningmotion to points close to
the work point. (The above example is based on five levels.)
Changing the level causes the path to vary.The shortcut to the
level changes at a ratio of 1:1. (As the level is changed, the
shortcut path willchange.) However, because the maximum shortcut is
half the path, in the case of the aboveexample, the levels 2 and 3
give the same result.
The recommended level is 0 or 1.In consideration of interference
with the peripheral jig, normally, select level 0 or 1. Setting
level 0causes the robot to move higher than P motion.
Q 100%, level=n
Path A Path B
Q 100%, level=0 Q 100%, level=0
n=1 n=1
n=2
n=3
n=4
n=2
n=3
n=4
n=0
-
7/27/2019 DR Teaching (1L5000D E 4)
30/234
2-8 Instructions for Robot Motions
If path B is one-third of path A in Fig. 2. 7, the robot will
take the path shown in Fig. 2. 8 because the
maximum shortcut is half the path. On the other hand, if path A
is one-third of path B, the robot will take the
path shown in Fig. 2. 9. This also applies to rate and
distance.
Fig. 2. 8 When Path B is 1/3 of Path A
Fig. 2. 9 When Path A is 1/3 of Path B
When the "level" option is selected for shortcut, and levels of
1, 2, 3, and so on are set at taught points,
respectively, the robot will take the following path:
(*1) The robot takes a shortcut on sequence 001.
(*2) The robot takes a shortcut even if the programmed
coordinate
system are different between the two sequences.
Fig. 2. 10 Path with Level Settings
002 Q 100%, level=2, Base
003 Q 100%, level=0, Base
001 Q 100%, level=0, Base
Path A
Path Bn=1
n=2
002 Q 100%, level=2, Base
001 Q 100%, level=0, Base
003 Q 100%, level=0, Base
Path A
Path B
n=1 n=1
001 Q level=1, Base
003 Q level=3, Base
002 Q level=2, Base
004 Q level=4, work
005 Q level=5, Base
006 Q level=6, Base
007 Q level=7, Base
Start point
-
7/27/2019 DR Teaching (1L5000D E 4)
31/234
Instructions for Robot Motions 2-9
Setting by Rate
In the "rate" representation, the amount of motion between two
taught points (a start point and a target point)
is taken as 100% and the amount of shortcut is defined as a
percentage. The robot takes a shortcut from
the point of k % before the target point.
Note that the rates that the robot has are processed in
quantitative units (rounded down) and are converted
into shortcut levels described in "Setting by Level". (The robot
may not take a shortcut with the 10%setting, or may take the same
shortcut path with the 20% and 30% settings.)
Fig. 2. 11 shows the path by rate using an example of five
shortcut levels.
Fig. 2. 11 Rate and Path
When the "rate" option is selected for shortcut, and rates of
10%, 20%, and so on are set at taught points,
respectively, the robot will take the following path:
(*1) The robot takes a shortcut on sequence 001.
(*2) The robot takes a shortcut even if the programmed
coordinate
Fig. 2. 12 Path with Rate Settings
Q 100%, rate=k%
Path A Path B
Q 100%, level=0% Q 100%, rate=0%
k=1 - 19 %
k=20 - 39 %
k=40 - 50 %
k=20 - 39 %
k=40 - 50 %
001 Q rate=10%, Base
Start point
002 Q rate=20%, Base
003 Q rate=30%, Base
004 Q rate=40%, Work
005 Q rate=50%, Base
-
7/27/2019 DR Teaching (1L5000D E 4)
32/234
2-10 Instructions for Robot Motions
Setting by Length
In the "length" representation, the amount of shortcut is
defined in centimeters with respect to a line between
two taught points (a start point and a target point). If a
distance of L cm is specified, the robot takes a
shortcut from the point of L cm before the target point.
Note that the length settings that the robot has are processed
in quantitative units (rounded down) and are
converted into shortcut levels described in "Setting by Level".
(The robot may not take a shortcut with the10 cm setting, or may
take the same shortcut path with the 20 cm and 30 cm settings.
Fig. 2. 13 shows the path by length using an example of five
shortcut levels.
Fig. 2. 13 Length and Path
(*1) The robot cannot take a shortcut on sequence 001.
(*2) The robot cannot take a shortcut if the programmed
coordinate
Fig. 2. 14 Path with Length Settings
Q 100%, length=Lcm
Path A Path B
L=0 - 19 cm
L=20 - 39 cm
L=40 - 50 cm
L=20 - 39 cm
L=40 - 50 cm
Q 100%, length=0cm Q 100%, length=0cm
Start point
001 Q length=10cm, Base
003 Q length=30cm, Base
005 Q length=50cm, Base
007 Q length=70cm, Base
006 Q length=60cm, Base
004 Q length=40cm, Work
002 Q length=20cm, Base
-
7/27/2019 DR Teaching (1L5000D E 4)
33/234
Instructions for Robot Motions 2-11
OperationTeaching the Quick Positioning Instruction (Q)
Move the robot, by manual manipulation, to the
position and attitude you want to teach.
! Press key.
" Press key.
#Set the speed with the numeric keys or the functionkeys.
$ To set the shortcut type, press key.
F1 ... Selects the rate option to set an amount
of shortcut.
F2 ... Selects the level option to set an amount
of shortcut.
F3 ... Select the length option to set an amount
of shortcut.
% Select the shortcut option and enter the shortcut
value.
& Press key.
This completes the storing of the quick positioning
instruction "Q".
'
(
(
-
7/27/2019 DR Teaching (1L5000D E 4)
34/234
2-12 Instructions for Robot Motions
Linear Interpolation (L) - Moving the Robot in a Straight Line
-The Linear interpolation instruction (L) allow the operator to
lineally move the tool tip of the robot to the taught
position/attitude from the immediately preceding stored position
and attitude.
The following conditions need to be set:
Speed
A speed to a moving distance of the tool tip (cm/min) is
set.
The entry range of speed is 1 - 999 cm/min. Note that, if a
value over 900 cm/min is set, moving speeds in
block operation and automatic operation are limited to 900
cm/min.
If the Work-side manipulator (Handling robot) is connected, the
speed of the Work-side manipulator are
limited to 600 cm/min.
Overlap ON/OFF
Setting the overlap ON/OFF are available.Normally, to perform
welding, set Overlap ON. Overlap ON setting causes the robot to
stop momentarily at
the joint of sequences during automatic operation.
IMPORTANT
The set speed may not be achieved.The set speed may not be
achieved depending on the manipulator type.Furthermore, the robot
will not move at the set speed in the following cases:- When a
change in orientation is too great with respect to the travel
distance.- When the travel distance is too short with respect to
the set speed.
An effect of a difference of overlap ON/OFF to the path:The
difference between overlap "ON" and "OFF" appears at a joint but
has no affect on any otherpart of the path.
Depending on the speed-distance relationship, the overlap ON
setting may be effective.
Even if Overlap "ON" is set, the setting may not be effective,
depending on the relation between the
moving distance and speed.
Overlap is not
in effect.
Robot stopsmomentarilyat the joint.
Robot does not stop buttakes a small short cut,which causes the
pathround at the oint.
0 5 10 15 20
50
100
150
200
Speed [cm/min]
Travel distance per sequence[cm/min]
Overlap is
in effect.
Fig. 2. 15 The Relation between the Overlap Effective Travel
Distance and Travel Speed
-
7/27/2019 DR Teaching (1L5000D E 4)
35/234
Instructions for Robot Motions 2-13
Depending on program data, the overlap ON setting may not be
effective.Even if Overlap is set ON, the overlap process is not in
effect in the following conditions:
- When two consecutive sequences are taught with different
coordinate systems.
- When Input Wait instructions (N, or F), Timer Time Wait
instruction (T), or No Operation instruction
(NOP) is taught between two sequences.
- When two consecutive sequences are synchromotion interpolation
instructions (HL, HC) andsingle
interpolation instructions (L, C) respectively.
Example
:003 HP004 L005 HL006 HL
:
- When the main mechanism is difference between two consecutive
sequences.
Example
:002 HL (The main mechanism is set mechanism 1)003 HL (The main
mechanism is set mechanism 1)004 HL (The main mechanism is set
mechanism 1)005 HL (The main mechanism is set mechanism 2)
Overlap is not in effect.
Overlap is in effect.
Overlap is in effect.
Overlap is not in effect.
003
HP
004
005
006
L
HL
HL
002
HL
003 HL
004 HL
005 HL
-
7/27/2019 DR Teaching (1L5000D E 4)
36/234
2-14 Instructions for Robot Motions
OperationTeaching the Linear Interpolation Instruction (L)
Move the robot, by manual manipulation, to the
position and attitude you want to teach.
Press key.
The following conditions will be displayed at
the function display area on the teach pendant.
F1 ... Speed: 60cm/min, Overlap:ON.
F2 ... Speed:100cm/min, Overlap:ON
F3 ... Speed:200cm/min, Overlap:ON
F4 ... Speed:300cm/min Overlap:ON
F5 ... Speed:100cm/min, Overlap:OFF
You can set the conditions by selecting the function
key instead of the following procedure.
If you want change the speed, enter the speed
by using numeric keys.
Set overlap ON/OFF, if necessary.
The default setting is ON. To change to OFF,
(1) Press key.
(2) Press F2 key (OFF).
Press key.
Now, the Linear interpolation instruction "L" has
been stored.
-
7/27/2019 DR Teaching (1L5000D E 4)
37/234
Instructions for Robot Motions 2-15
Linear Interpolation Associated with Attitude Rotation (LO)-
Rotating the Attitude -
This instruction causes the attitude of the robot to rotate with
linear motion of the tool tip.
The following conditions need to be set:
Speed
A speed rate to a moving angle of the tool tip (deg/sec) is set.
The entry range of speed is 1 - 99.9 deg/sec.
Note that, if a speed over 45.0 deg/sec is set, moving speeds in
block operation and automatic operation are
limited to 45 deg/sec.
Overlap ON/OFF
Setting the overlap ON/OFF are available.
For setting Overlap ON/OFF, refer to the section "Linear
Interpolation (L)".
OperationTeaching the Linear Interpolation Associated with
Attitude Rotation Instruction (LO)
Move the robot, by manual manipulation, to the
position and attitude you want to teach.
Press key.
Press key.
F1 ... Speed: 5.0 deg/min, Overlap:ON.
F2 ... Speed:10.0 deg/min, Overlap:ON
F3 ... Speed:15.0 deg/min, Overlap:ON
F4 ... Speed:20.0 deg/min Overlap:ON
F5 ... Speed:10.0 deg/min, Overlap:OFF
Set the speed and Overlap ON/OFF as set for
Linear interpolation instruction (L).
Press key.
Now, the Linear interpolation associated with attitude
rotation instruction "LO" has been stored.
!
-
7/27/2019 DR Teaching (1L5000D E 4)
38/234
2-16 Instructions for Robot Motions
High Speed Linear Interpolation (L')- Moving the Robot in a
Straight Line Quickly -
This instruction is similar to L, except that it provides faster
travel.
The following conditions need to be set:
Speed
A speed to a moving distance of the tool tip (cm/min) is
set.
Though you can set the speed in the range 1 to 9999 cm/min, the
actual maximum speed is limited to 9000
cm/min. Even if a speed value greater than 9000 cm/min is
entered, in automatic operation the speed is
limited to 9000 cm/min. The maximum speed in block operation is
1000 cm/min.
Overlap ON/OFF
Setting the overlap ON/OFF are available. For setting Overlap
ON/OFF, refer to "Linear Interpolation (L)".
IMPORTANT
For quick motion, a minimal change in the attitude is
desirable.When you use the High speed Linear Interpolation
instruction (L') to move the robot quickly, try tochange the
attitude as little as possible. A large change in the attitude can
cause rough movementof the robot.
Note on setting conditions including a speed and overlap
ON/OFF:
There are restrictions affecting the condition settings
including a speed and overlap ON/OFF. For
details, see the section "Linear Interpolation (L)".
OperationTeaching the High Speed Linear Interpolation
Instruction (L') Move the robot, by manual manipulation, to the
position and attitude you want to teach.
Press key.
Press key twice.
F1 ... Speed: 600cm/min, Overlap:ON.F2 ... Speed: 1000cm/min,
Overlap:ON
F3 ... Speed: 2000cm/min, Overlap:ON
F4 ... Speed: 3000cm/min Overlap:ON
F5 ... Speed: 1000cm/min, Overlap:OFF
Enter the speed and Overlap ON/OFF as set for
Linear interpolation instruction (L).
Press key.
Now, the High Speed Linear interpolation instruction
"L' " has been stored.
-
7/27/2019 DR Teaching (1L5000D E 4)
39/234
Instructions for Robot Motions 2-17
Circular Interpolation (C1/C2) - Moving the Robot along an Arc
-These instructions allow the operator to circularly move the tool
tip of the robot to the taught position/attitude
from the immediately preceding stored position and attitude.
As shown below, a circular arc is determined by teaching three
points (a start point/a middle point/an end point).
Be sure to teach three points.
- Start point : any one of P or L before C1
- Middle point : C1
- End point : C2
Fig. 2. 16 The Parts of Circular Interpolations
For setting moving speeds and Overlap ON/OFF, refer to the
section "Linear Interpolation (L)".
IMPORTANT
Teach all three points in the same coordinate system.Teach all
of a start, middle and end points to make a circular arc, with the
same type of coordinate
system.
The minimum diameter of an arc along which the robot can
move:The diameter of the minimum circular arc varies according to
the manipulator type and the speedsetting.
P, or L (start point)
C1 (middle point)
C2 (end point)
P, or L (start point)
C1 (middle point)
C2 (end point)
C2 (end point)
C2 (end point)
100
50
0 1 2 3
Speed
Usable area
Circulardiameter
[m/min]
[mm]
100
50
0 1 2 3
Speed
Usable area
[m/min]
[mm]
(a) When Using G Type Manipulator (b) When Using V Type
Manipulator
Fig. 2. 17 The diameter of the minimum circular arc
-
7/27/2019 DR Teaching (1L5000D E 4)
40/234
2-18 Instructions for Robot Motions
OperationTeaching the Circular Interpolation Instructions
(C1/C2)
Move the robot, by manual manipulation, to the
position and attitude you want to teach.
Press key.
The following conditions will be displayed at
the function display area on the teach pendant.
F1 ... Speed: 60cm/min, Overlap:ON.
F2 ... Speed:100cm/min, Overlap:ON
F3 ... Speed:200cm/min, Overlap:ON
F4 ... Speed:300cm/min, Overlap:ON
F5 ... Swithces between C1 and C2
Set the speed and Overlap ON/OFF as set for
Linear interpolation instruction (L).
Press key.
Now, the Circular interpolation instruction "C1"
or "C2" has been stored.
-
7/27/2019 DR Teaching (1L5000D E 4)
41/234
Instructions for Robot Motions 2-19
Circular Interpolation Associated with Attitude Rotation
(CO1/CO2)- Rotating the Attitude -
These instructions cause the attitude of the robot to rotate
with circular motion of the tool tip.
As described in the previous section, a circular arc is
determined by teaching three points (a start point/a middle
point/an end point). Be sure to teach three points.
The setting conditions are the same as "LO". Refer to the
section "Linear Interpolation Associated with
Attitude Rotation (LO)".
OperationTeaching the Circular Interpolation Associated with
Attitude Rotation Instructions (CO1/CO2)
Move the robot, by manual manipulation, to the
position and attitude you want to teach.
Press key.
Press key.
F1 ... Speed: 5.0 deg/min, Overlap:ON.
F2 ... Speed:10.0 deg/min, Overlap:ON
F3 ... Speed:15.0 deg/min, Overlap:ON
F4 ... Speed:20.0 deg/min Overlap:ONF5 ... Switches between CO1
and CO2
Set the speed and Overlap ON/OFF as set for
Linear interpolation instruction (L).
Press key.
Now, the Circular interpolation associated with attitude
rotation instruction "CO1" or "CO2" has been stored.
!"
!
-
7/27/2019 DR Teaching (1L5000D E 4)
42/234
2-20 Instructions for Robot Motions
High Speed Circular Interpolation (C1'/C2')- Moving the Robot
along an Arc Quickly -
The C1' and C2' are high speed circular interpolation
instructions in addition to C1 and C2, respectively.
The setting conditions are the same as "L' ". Refer to the
section "High Speed Linear Interpolation (L' )".
OperationTeaching the High Speed Circular Interpolation
Instructions (C1'/C2')
Move the robot, by manual manipulation, to the
position and attitude you want to teach.
Press key.
Press key twice.
F1 ... Speed: 600cm/min, Overlap:ON.
F2 ... Speed: 1000cm/min, Overlap:ON
F3 ... Speed: 2000cm/min, Overlap:ON
F4 ... Speed: 3000cm/min Overlap:ON
F5 ... Speed: 1000cm/min, Overlap:OFF
Set the speed and Overlap ON/OFF.
Press key.
Now, the High speed Circular interpolation instruction
"C1' " or "C2' " has been stored.
-
7/27/2019 DR Teaching (1L5000D E 4)
43/234
Instructions for Robot Motions 2-21
Timer Wait (T) - Stopping the Robot for a Period of a Set
Time
-This instruction allows the operator to stop execution of the
Task program for a specified time. Note that
weaving and welding are carried on without being stopped.
OperationTeaching the Timer Wait Instruction (T)
Press key.
Enter the time with numeric keys.
Press key.
Now, the Timer Wait instruction "T" has
been stored.
No Operation (NOP) - Enabling the Robot to Do Nothing -This
instruction allows the operator to specify no operation, and is
used to synchronize between Motion
instructions and Task instructions.
Like the case of Timer Wait instruction, weaving and welding are
carried on without being stopped.
Use this instruction when you want to teach more than 9
instructions continuously or do not want to
simultaneously execute a series of external control
inputs/outputs.
OperationTeaching the No Operation Instruction (NOP)
Press key.
Press F2 key (NOP).
Press key.
Now, the No Operation instruction "NOP" has
been stored.
-
7/27/2019 DR Teaching (1L5000D E 4)
44/234
2-22 Instructions for Robot Motions
Program End (END) - Ending the Program -The END instruction is
used to terminate execution of a Task program. This instruction
causes the J ob
complete process to be executed.
OperationTeaching the Program End Instruction (END)
Press key.
Press key.
Now, the END instruction has been stored.
-
7/27/2019 DR Teaching (1L5000D E 4)
45/234
Chapter 3Branch Instructions
This chapter describes the branch instructions.
Contents
Internal J ump - J umping to Any Position in the Program
-...................................................................................3-1
Internal J ump
(JP)...............................................................................................................................................3-1
Point Mark
(PM)..................................................................................................................................................3-2
Defining and Decrementing the Counter
Value..................................................................................................
3-2
Define Counter Value
(DEF)...........................................................................................................................3-2
Decrement Counter Value
(DEC)...................................................................................................................3-3
Internal J ump
Examples.....................................................................................................................................3-3
Specifying the State of an External Input Signal as a
Condition.....................................................................3-3
Specifying a Counter as a
Condition...............................................................................................................3-3
Call Program (CL) - Calling Another Program -
...................................................................................................3-7
Call
Operation.....................................................................................................................................................3-7
Specifying a Task Program to Be
Called............................................................................................................3-8
Specifying
Directly...........................................................................................................................................3-8
Specifying by means of an External
Input.......................................................................................................3-8
Specifying by means of an General-Purpose
Register..................................................................................
3-8
J ump to Program (J F) - J umping to Another Program -
....................................................................................3-12
J ump
Operation................................................................................................................................................3-12Specifying
a J ump Destination Task
Program..................................................................................................3-13
Specifying
Directly.........................................................................................................................................3-13
Specifying by means of an External
Input.....................................................................................................3-13
Specifying by means of an General-Purpose
Register................................................................................3-13
Skip (SKS/SKE) - Stopping the Execution to J ump to a Specified
Position -
....................................................3-17
Structured Description (IF/EIF/ELS/FI) - Branching in the
IF-THEN-ELSE Form -
...........................................3-20
What Are the Structured Description
Instructions?...........................................................................................3-20
Explanation of the Structured Description Instructions
.....................................................................................3-21
Task Program Examples Using the Structured Description
Instructions..........................................................3-23
Description Example
1..................................................................................................................................3-23
Description Example
2..................................................................................................................................3-23
-
7/27/2019 DR Teaching (1L5000D E 4)
46/234
-
7/27/2019 DR Teaching (1L5000D E 4)
47/234
Branch Instructions 3-1
Internal J ump - J umping to Any Position in the Program -Though
instructions are sequentially executed in block or automatic
operation, the internal program jump
functions allows the operator to shift execution (jump) to a
desired sequence.
J ump conditions include the external control input state,
counter, etc.
The following instructions are used to execute an internal
program jump:
- Internal J ump J P (JumP)
- Point Mark (jump destination) PM (Point Mark)
- Counter conditions for jump DEC (DECrement) and
DEF(Define)
For example, the following program enables you to repeat
automatic operation between sequences 002 to 005:
ExampleRepeating automatic operation using the Internal J ump
instruction
001 PM1 Point Mark No.1 (J ump destination)
002 P
003 P
AS
004L
AE
005 P
006 J P PM1 Causes the robot to Jump to point Mark No.1
007 END
Internal J ump (J P)The J P instruction causes execution to jump
to a specified point mark (PM) in the Task program.
When the J P is executed, it causes the robot to move to the
point mark (refer to next section) position you
taught. The robot moves to a point mark (PM) in positioning P
motion. The speed is defined on the user
parameter ([SYSTEM] "SPEED TO PM"). However, in block operation,
the robot moves at a block
operating speed.
The following jump conditions are available:
Unconditional jump
Always causes a jump to the specified point mark (PM).
Conditional jump on the state of an external control input
Checks the state of the specified external control input and
causes a jump to the specified point mark
(PM) if the condition is met.
Conditional jump on an internal counter
Causes a jump to the specified point mark (PM) when the
specified counter reads 0.
Conditional jump on a comparison operation between
general-purpose registersCauses a jump to the specified point mark
(PM) if the result of a comparison operation between
general-purpose registers is true.
-
7/27/2019 DR Teaching (1L5000D E 4)
48/234
3-2 Branch Instructions
Point Mark (PM)The point mark indicates the internal jump
destination.
Teaching up to 99 point marks (1 99) in one Task program is
possible.
IMPORTANT
The Point Mark has positional data.
Like the Positioning instruction (P), the Point Mark instruction
has position/attitude data. Therefore,the robot moves the position
where the Point Mark was taught, at the time of execution of the
Internal
J ump instruction (J P). Note that the robot does not move to
that point unless the JP instruction isexecuted.
Example
001 P002 PM1003 L004 L005 J P PM1
:
In the system having multiple mechanism, the positional data of
all mechanisms are recorded.In the system having more than one
mechanism, the Point Mark gives an effect similar to the
HPinstruction that enables storing of the positions of all the
mechanisms. Therefore, if your system hasmore than one mechanism,
give attention also to the position(s) of the other mechanism(s)
such as aslider and/or a positioner when teaching the Point
Mark.
If a point mark with the same number is taught:If a point mark
with the same number is taught within a Task program, only the
point mark taught at
the lower sequence number is valid.
Defining and Decrementing the Counter ValueThe Define Counter
instruction is used to set a counter for a condition of a jump, and
the Decrement Counter
instruction is used to decrement its value.
For example, the use of these instructions allows you to specify
the number of times that you want to repeat
automatic operation, and terminate the execution when the
automatic operation has been carried out the
specified number of times.
The Define Counter and Decrement Counter instructions can be
used as branch conditions of not only aninternal jump but also a
program call and an external jump.
Define Counter Value (DEF)The Define Counter instruction (DEF)
is used to set a counter value used as a condition for the
Internal
J ump, Program Call , or External Program J ump instruction to
cause a branch. You need to set a counter
number (1 - 9) and its value (1 -999) as conditions.
Up to 9 counter numbers can be used in one program for automatic
operation. One program for automatic
operation means a program which is executed throughout the
sequences until the job is complete.
Therefore, this includes other programs if they are activated by
the External J ump or Call instructions.
The robot moves to the Point Mark position onlywhen the Internal
Jump instruction is executed.
-
7/27/2019 DR Teaching (1L5000D E 4)
49/234
Branch Instructions 3-3
Decrement Counter Value (DEC)
The Decrement Counter instruction (DEC) is used to decrement the
value of a specified counter by 1.
When the counter value is 0, the execution is ignored. (The
value remains as 0.) You need to set a
counter number (1 - 9) as a condition.
The counter number changes in the following conditions:
- When the robot controller is turned on 0
- When the counter value is 0 and DEF is executed the value
specified by DEF
- When the counter value is larger than 0 and DEC is executed
the value deducted by 1 by DEC.
Internal J ump Examples
Specifying the State of an External Input Signal as a
Condition
To make a program, "Check the state of input port 7 before the
program is terminated Repeat theoperation if there is an input.
Terminate the program if no input.", teach:
001 PM1 Specify point mark (PM) number 1.
002 P
003 L
004 P
005 J P N007, PM1 J ump to PM1 (sequence 001) if there is an
input at input port 007.
006 END
Specifying a Counter as a ConditionTo repeat the operation 5
times and terminate the Task program, teach:
001 P
DEF #2, 005 Set counter 2 at 5.
002 PM1
003 L
004 P
DEC #2 Decrement 1 to the value of counter 2 by 1.
005 JP #2, PM2 J ump to PM2 (sequence 007) if counter 2 is 0,
and terminate
automatic operation.
006 J P PM1 J ump to PM1 (sequence 001) if counter 2 is not
0.
(Repeat sequences 001 - 005 5 times.)
007 PM2
008 END
When automatic operation is performed, the operation from
sequence 002 through 005 is repeated 5 times.
-
7/27/2019 DR Teaching (1L5000D E 4)
50/234
3-4 Branch Instructions
Operation1Teaching the Internal Program J ump Instruction (J
P)
Press key.
Press F2 key (J P).
F1 ... J umps when a specified input port is ON.
F2 ... J umps when a specified input port is OFF.
F3 ... J umps when the counter value is 0.
F4 ... J umps to a point mark unconditionally
F5 ... J ump when a comparison operation
between general-purpose registers is true.
NOTE
For information about general-purpose registers and the steps
following the selection of F5 key, seeChapter 7 "General-Purpose
Registers".
J ump according to the external control input state
(1) Press F1 key (JP ON) or F2 key (J P OFF).
(2) Enter a port number as the jump condition with
numeric keys.
(3) After pressing key, enter the point park number
for the destination with numeric keys.
(4) Press key.
Now, the Internal Program J ump instruction "J P"
has been stored.
-
7/27/2019 DR Teaching (1L5000D E 4)
51/234
Branch Instructions 3-5
J ump according to the counter
(1) Press F3 key (J P CNT).
(2) Enter a counter number as the jump condition with
numeric keys.
(3) After pressing key, enter the point park number
for the destination with numeric keys.
(4) Press key.
Now, the Internal Program J ump instruction "J P" hasbeen
stored.
Unconditional jump
(1) Press F4 key (UNCOND).
(2) Enter the point park number for the destination
with numeric keys.
(3) Press key.
Now, the Internal Program J ump instruction "J P"
has been stored.
Operation2Teaching the Point Mark Instruction (PM)
Press key.
Press F4 key (PM).
Enter the point mark number with numeric keys.
Press key.
Now, the Point Mark instruction "PM" has been stored.
-
7/27/2019 DR Teaching (1L5000D E 4)
52/234
3-6 Branch Instructions
Operation3Teaching the Counter Define (DEF) and Decrement (DEC)
Instructions
Press key.
Press F5 key (COUNTER).
Teaching DEFine a counter value
(1) Press F1 key (DEF).
(2) Enter a counter number with numeric keys.
(3) After pressing key, enter the counter value.
(4) Press key.
Now, the DEFine counter value instruction "DEF"
has been stored.
Teaching DECrement a counter value
(1) Press F2 key (DEC).
(2) Enter a counter number with numeric keys.
(3) Press key.
Now, the DECrement instruction "DEC" has
been stored.
-
7/27/2019 DR Teaching (1L5000D E 4)
53/234
Branch Instructions 3-7
Call Program (CL) - Calling Another Program -The Call program
instruction is used to execute another Task program from within the
Task program being
currently executed and return control to the original program
after the called program is executed. This allows the
operator to sequentially run multiple Task programs.
Call OperationThe following examples are given to explain the
Call Program instruction.
P001
P002
Fig. 3. 1 The Taught Data and Paths of Task Programs P001 and
P002
If P002 is called after executing sequence 5 in P001, the path
is shown as below:
Executed
Fig. 3. 2 Path Made by Calling P002 from within P001
IMPORTANT
Call is limited to a maximum of 4 layers
It is possible to use CL in a called Task program, but such call
is limited to a maximum of 4 layers.If you try to call over that,
an error will occur.
PP, END
P
L L
L
P
P
L
L P
P
P, END
P001 P002
P001
P
P
L L
L
P
PL
LP
PP
P, END
-
7/27/2019 DR Teaching (1L5000D E 4)
54/234
3-8 Branch Instructions
Specifying a Task Program to Be CalledThere are three ways of
specifying a Task program number to be called:
- Specifying directly at the time of teaching
- Specifying by means of an external input
- Specifying by means of a general-purpose register
Specifying Directly
In this method, a Task program is specified during a teaching
operation. When CL is executed, execution
is shifted to the stored Task program.
The following call conditions are available:
Unconditional call
Always calls the specified Task program.
Conditional call on the state of an external control inputChecks
the state of the specified external control input and calls the
specified Task program if the
condition is met.
Conditional call on an internal counter
Calls the specified Task program when the specified counter
reads 0.
Conditional call on a comparison operation between
general-purpose registers
Calls the specified Task program if the result of a comparison
operation between general-purpose
registers is true.
Specifying by means of an External Input
In this method, a Task program number is specified by external
signals to specialized logical input ports,
instead of be