Embed Size (px)
Citation preview

DISPERSIVE DELAY LINES Matched Filters for Signal Processing
Spectrum Analysis
Variable Delay
Radar Pulse Expansion-Compression
Chirp Z Transforms
Adaptive Bandpass Filter

INTRODUCTION Dispersive delay lines historically evolved as matched filters for linear fm waveforms in military radar pulse ex- pansion and compression systems. Today, with Andersen's SAW and IMCON technology, a large range of para- meters are available which make possible new approaches to signal processing. In addition to expanding the performance of radar pulse expansion and compression systems, Andersen's dispersive delay lines provide new capabilities in spectrum analysis, variable delay systems and adaptive bandpass filtering systems. Because of the low cost high volume production benefits of the SAW technology, dispersive delay lines are now available at costs compatible with commercial solid state radars.
Definitions The most common dispersive delay lines are charac- terized by a linear group delay versus frequency characteristic. Key performance parameters for lin- ear dispersive delay lines are defined with the aid of Figures 1-4.
Transfer Function
The transfer function has an amplitude versus fre- quency characteristic which is essentially flat over the bandwidth of interest. The phase characteristic is parabolic resulting in the linear group delay versus frequency characteristic. The amplitude and group delay characteristic are shown in Figure 1. The in- dicated parameters are defined as follows:
Impulse Response - Expanded Pulse
The impulse response h(t) of the dispersive delay line is the inverse Fourier transform of its transfer function. This is a signal of time duration ∆t with the instantaneous frequency f varying linearly through- out the signal over the frequency range ∆f centered at f0 as shown in Figure 2. This waveform is often referred to as the expanded pulse. Matched Filter Response - Compressed Pulse
A matched filter optimizes the signal to noise ratio in a communication receiver and has the property that its transfer function is the complex conjugate of the Fourier transform of the signal to be received The matched filter for the impulse response h(t) of a dispersive filter is then an identical filter of opposite dispersive slope. The matched filter response, as shown in Figure 3, is a compressed pulse of sin x/x shape.
Pulse Compression Ratio - Time Bandwidth Product
The compressed pulse is characterized by the Pulse Compression Ratio or Time Bandwidth Product, N, of the dispersive delay line. N is the ratio of the ex- panded pulse length ∆t: to the compressed pulse width 1/∆f or the product of the dispersive bandwidth and the time dispersion of the filter. The ratio of the amplitude of the compressed pulse to that of the expanded pulse is √N. Thus, N is the signal to noise improvement realized in using a matched filter for the detection of a linear fm signal.
Weighted Matched Filter Response
Often the compressed pulse sidelobe level of -13.2db characteristic of a sin x/x pulse is not adequate and greater sidelobe suppression is required. The side- lobe levels can be reduced into the -30 to -50db range by the use of an appropriate external weighting function. Figure 4 illustrates the effect of Hamming Weighting which can theoretically provide -42db sidelobes. As a result of Hamming Weighting, the compressed pulse is widened by about 50% and the compression gain is degraded by 1.35db. When the expanded pulse is gated prior to pulse compression and for low values of N (i.e. less than 100) Fresnel sidelobes can be present. These sidelobes are located approximately ±∆t/2 from the center of the compressed pulse and limit the amount of side lobe reduction possible. The level of the Fresnel side- lobes is approximately 20 log N + 3 db below the peak of the compressed pulse.
Equivalent weighting can be realized by multiplying the expanded pulse by a time function whose ampli- tude characteristics are the inverse Fourier trans- form of W (w). This characteristic can be incorpo- rated directly into the device design eliminating the need for an external filter.
Insertion Loss
Insertion loss for a dispersive delay line is normally defined for a cw input signal and is typically in the 30 to 50 db range. When the device is used for pulse expansion and the input impulse signal bandwidth equals ∆f, the peak output signal level is approxi- mately 10 fog N db below the cw insertion loss. In pulse compression, the compressed pulse peak level is 10 log N db greater than the cw reference loss level.

TYPES OF DEVICES AND RANGE OF PERFORMANCE Andersen manufactures two types of dispersive delay lines: IMCON and SAW. Performance param- eters encompass the bandwidth range from a 100KHz to 200 MHz with time bandwidth products of up to 25,000. These products are fabricated with acoustic delay line technology. Computer design techniques and patented acoustic amplitude and phase correction techniques allow the ultimate in performance in production devices.
IMCON's are reflection mode delay lines fabricated on steel acoustic media and are most suited for the applications requiring dispersions of greater than 50µsec at center frequencies below 30 MHz with bandwidths of .5 to 12MHz. Time dispersions of 600µs can be realized in a single device and units
have been cascaded to produce time dispersions of 10ms with a 25,000 time bandwidth product. IMCON's offer superior sidelobe performance to any other approach. Units have been fabricated on a pro- duction basis with close in compress ion pulse sidelobes of - 48dB. For most IMCON designs, the sidelobes decrease in amplitude monotonically over the time interval extending ∆t on either side of the central lobe of the compressed pulse.
SAW dispersive delay lines are most suited for the lower dispersion (< 100µs), wide bandwidth applica- tions. These devices utilize surf ace acoustic wave technology on the surface of piezoelectric sub· strates. Two fabrication approaches are employed depending on performance requirements.

The first approach uses non-uniform interdigital (ID) transducers in a conventional SAW configura- tion. For dispersions of less than 10µs, this approach offers very low cost high volume production poten- tial. However, sidelobe levels are limited to around - 30dB. In many requirements, a zero temperature coefficient quartz substrate can be used allowing a high degree of performance stability over large temperature ranges.
The second SAW approach is a surface wave im- plementation of IMCON (sometimes called RAC) which is most useful for the larger timeband width products. It also provides better sidelobe perfor- mance than the interdigital approach.
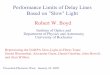
The range of achievable parameters is plotted in Figure 5 for SAW and IMCON devices. Those chara- teristics contained within the solid lines can be realized with a single device. Increased dispersion and time bandwidth product can be achieved by cascading units. Figure 6 tabulates the character- istics of several IMCON and SAW devices in current production.
Non-Linear Devices The design techniques outlined above have been used to provide nonlinear time versus frequency characteristics. Such characteristics are advantageous in certain radar applications for minimizing signal to noise degradation. Subsystems Andersen offers dispersive delay line subsystems for any of the applications cited in the next section. These systems are hybrid assemblies including all the necessary electronics to perform pulse expansion, pulse compression, and sidelobe reduction.
FIGURE 6

APPLICATIONS
Radar Pulse Expansion Compression Figure 7 presents the block diagram for a typical pulse compress ion system. The spectrum inverter shown in the receiver channel allows the use of the same slope dispersive filter for both expansion and compression. In some instances, it is possible to time share one filter for both functions. The weight- ing filter is typically either Hamming or Taylor. In many instances, the weighting is designed into the dispersive filter by tappering its amplitude response.
Figure 8 shows systems performance for a Dl-15·6·100-211A dispersive filter (see page 7).
Variable Delay Systems The linear delay versus frequency characteristics of a dispersive filter can be employed to make con- tinuously variable delay lines as shown in Figure 9. If the input signal is bandlimited to less than M/2. then a relative variable delay of ∆t/2 can be realized with the system shown by varying the control frequency fv. fv can be derived from a VCO or a frequency synthesizer depending on accuracy requirements.
Chirp Z Transform - CZT Figure 11 shows the schematic of a system for per- forming Chirp Z Transforms. The output signal is the discrete Fourier Transform (DFT) of the input signal including both amplitude and phase information. The system operates in a manner similar to the compres- sive receiver shown in Figure 10. The additional mixer and dispersive delay line are necessary to pro- vide the output signal with the proper phase char- acteristic. The input signal is sampled over the time period ∆t and the frequency resolution of the output signal is 1 / ∆t.
Spectrum Analysis A linear dispersive delay line is an extremely valu- able tool in spectrum analysis since its linear time delay versus frequency characteristics can be used to perform discrete Fourier transforms in real time. Andersen's IMCON and SAW devices offer increased processing capability in those applications requiring fast analysis and wide bandwidth.
Compressive Receiver (Microscan Receiver)
Figure 10 shows a schematic representation of a compressive receiver. The input signal f(t) is multi- plied by the impulse response of a positive slope dis- persive delay line of bandwidth ∆f and dispersion ∆t. This signal is then passed through a negative slope delay line with bandwidth 2∆f and dispersion 2∆t. The output signal is proportional to |F(w)| the magnitude of the Fourier transforms of f(t) where w =2πt/s. If f(t) is a cw signal at wo, the output is a compressed pulse of width l/∆f corresponding to a frequency increment of 1/(s∆f) = 1/ ∆t. The pulse occurs at a relative time of wos/2π and has an amplitude proportional to that of f(t). If f(t) has many frequency components, the output signal contains series of sin x/x pulses, one for each frequency component within ∆f with amplitude proportional to the amplitude of that frequency component and time location proportional to the frequency. The frequency resolution of the system is 1I/∆t and the number of frequency components that can be resolved is ∆f/(1/∆t) or N.

Cross Correlation and Auto Correlation Digital approaches for performing correlation are complex and slow. By using Chirp Z Transforms, the cross correlation of two arbitrary wideband signals can be performed in a purely analog manner in real time. The block diagram of Figure 12 depicts such a means of performing cross correlation. If g(t) is re- placed by f(t) , then the system will produce the auto correlation function of f(t).
Adaptive Bandpass Filters
Since the CZT provides a time replica of the Fourier transform, adaptive filtering can be performed by multiplying a CZT output with a time function and by retransforming the result as show in Figure 13. If g(t) is a pulse generator, selective passband and stop and filtering can be performed by varying the width and polarity of the pulses. The center frequency of the effect is determined by the relative time location of the pulse.