-
7/27/2019 DIS 20806 balancing.pdf
1/30
ISO 2002 All rights reserved
Document type: International StandardDocument subtype:Document
stage: (40) EnquiryDocument language: E
G:\WPFILES\TC108\SC1\20806\ISO_DIS_20806_(E).doc STD Version
2.1
ISO TC 108/SC 1
Date: 2002-11-12
ISO/DIS 20806
ISO TC 108/SC 1/WG 15
Secretariat: ANSI
Mechanical vibration In-situ balancing of rotors
Guidance,safeguards and reporting
lment introductif lment central lment complmentaire
Warning
This document is not an ISO International Standard. It is
distributed for review and comment. It is subject tochange without
notice and may not be referred to as an International Standard.
Recipients of this draft are invited to submit, with their
comments, notification of any relevant patent rights ofwhich they
are aware and to provide supporting documentation.
-
7/27/2019 DIS 20806 balancing.pdf
2/30
ISO/DIS 20806
ii ISO 2002 All rights reserved
Copyright notice
This ISO document is a Draft International Standard and is
copyright-protected by ISO. Except as permittedunder the applicable
laws of the user's country, neither this ISO draft nor any extract
from it may bereproduced, stored in a retrieval system or
transmitted in any form or by any means, electronic,photocopying,
recording or otherwise, without prior written permission being
secured.
Requests for permission to reproduce should be addressed to
either ISO at the address below or ISO'smember body in the country
of the requester.
ISO copyright officeCase postale 56 CH-1211 Geneva 20Tel. + 41
22 749 01 11Fax + 41 22 749 09 47E-mail [email protected]
www.iso.org
Reproduction may be subject to royalty payments or a licensing
agreement.
Violators may be prosecuted.
-
7/27/2019 DIS 20806 balancing.pdf
3/30
ISO/DIS 20806
ISO 2002 All rights reserved iii
Contents Page
Foreword
.............................................................................................................................................................v
Introduction........................................................................................................................................................vi
1
Scope......................................................................................................................................................7
2 Normative
references............................................................................................................................7
3 Terms and
definitions...........................................................................................................................7
4 In-situ balancing
....................................................................................................................................74.1
General
...................................................................................................................................................74.2
Reasons for in-situ
balancing..............................................................................................................8
5 Criteria for in-situ balancing
................................................................................................................8
6
Safeguards.............................................................................................................................................96.1
General
...................................................................................................................................................96.2
Safety of personnel while operating close to a rotating
shaft..........................................................96.3
The special operating envelope for in-situ balancing
.......................................................................96.4
Integrity and design of the correction masses and their
attachments............................................96.5
Machinery specific safety
implications.............................................................................................10
7 Measurements
.....................................................................................................................................107.1
Vibration measurement equipment
...................................................................................................107.2
Measurement
errors............................................................................................................................107.3
Phase reference signals
.....................................................................................................................11
7.3.1 General
.................................................................................................................................................117.3.2
Information required for reproducible phase reference data
.........................................................117.3.3
Phase data when using trial masses as the phase reference
........................................................12
8 Operational conditions
.......................................................................................................................13
9 Acceptance criteria
.............................................................................................................................13
10
Reporting..............................................................................................................................................1310.1
General
.................................................................................................................................................1310.2
Introduction..........................................................................................................................................1310.2.1
Background..........................................................................................................................................1310.2.2
Objective
..............................................................................................................................................1410.2.3
Machine
details....................................................................................................................................1410.3
Vibration measurement equipment
...................................................................................................14
10.4
Results..................................................................................................................................................1410.4.1
Correction
masses..............................................................................................................................1410.4.2
Tabular data : Vibration results and correction mass
configurations...........................................1510.4.3
Graphical
data......................................................................................................................................1510.5
Text information
..................................................................................................................................1510.5.1
General
.................................................................................................................................................1510.5.2
Discussion
...........................................................................................................................................1510.5.3
Conclusion
...........................................................................................................................................1610.5.4
Recommendations
..............................................................................................................................16
Annex A (informative) Precautions and safeguards for specific
machine types during
in-situbalancing..............................................................................................................................................18
Annex B (informative) Sample in-situ balancing report for a
boiler fan
-
7/27/2019 DIS 20806 balancing.pdf
4/30
ISO/DIS 20806
iv ISO 2002 All rights reserved
B.3.1 Vibration
Transducers........................................................................................................................
20B.3.2 Phase Reference Transducers
..........................................................................................................
20B.3.3 Analysis
system..................................................................................................................................
20B.3.4
Results.................................................................................................................................................
21
Annex C (informative) Sample balancing report for a large,
>40 MW, turbine generator......................... 24C.1
Background.........................................................................................................................................
25C.2
Objective..............................................................................................................................................
25C.3 Machine details
...................................................................................................................................
25C.4
Instrumentation...................................................................................................................................
25C.5
Results.................................................................................................................................................
26C.5.1 Correction masses
.............................................................................................................................
26C.5.2 Tabular
data.........................................................................................................................................
27C.5.3 Vector
changes...................................................................................................................................
27C.6 Vibration
Signatures...........................................................................................................................
27C.7
Discussion...........................................................................................................................................
29
Bibliography.....................................................................................................................................................
30
-
7/27/2019 DIS 20806 balancing.pdf
5/30
ISO/DIS 20806
ISO 2002 All rights reserved v
Foreword
ISO (the International Organization for Standardization) is a
worldwide federation of national standards bodies(ISO member
bodies). The work of preparing International Standards is normally
carried out through ISOtechnical committees. Each member body
interested in a subject for which a technical committee has
beenestablished has the right to be represented on that committee.
International organizations, governmental andnon-governmental, in
liaison with ISO, also take part in the work. ISO collaborates
closely with theInternational Electrotechnical Commission (IEC) on
all matters of electrotechnical standardization.
International Standards are drafted in accordance with the rules
given in the ISO/IEC Directives, Part 2.
The main task of technical committees is to prepare
International Standards. Draft International Standardsadopted by
the technical committees are circulated to the member bodies for
voting. Publication as an
International Standard requires approval by at least 75 % of the
member bodies casting a vote.
Attention is drawn to the possibility that some of the elements
of this document may be the subject of patentrights. ISO shall not
be held responsible for identifying any or all such patent
rights.
ISO 20806 was prepared by Technical Committee ISO/TC 108,
Mechanical vibration and shock,Subcommittee SC 1, Balancing,
including balancing machines.
-
7/27/2019 DIS 20806 balancing.pdf
6/30
ISO/DIS 20806
vi ISO 2002 All rights reserved
Introduction
Balancing is the process by which the mass distribution of a
rotor is checked and, if necessary, adjusted toensure that the
residual unbalance or the vibrations of the journals/bearing
supports and/or forces at thebearings are within specified limits.
Many rotors are balanced in specially designed, balancing
facilitiesprior to installation into their bearings at site.
However, if remedial work is carried out locally or a
balancingmachine is not available, it is becoming increasingly
common to balance the rotor in-situ.
In-situ balancing is the process of balancing a rotor in its own
bearings and support structure, rather than ina balancing machine.
(This is the same definition as field balancing in ISO 1925:2001,
but in-situ balancingis easier to understand and will be used in
the future.)
A general guide to the ISO standards associated with mechanical
balancing of rotors is given in ISO
19499. Rotors in a constant (rigid) state are covered by ISO
1940-1 and rotors in a shaft elastic (flexible)state are covered by
ISO 11342.
-
7/27/2019 DIS 20806 balancing.pdf
7/30
ISO 2002 All rights reserved 7
Mechanical vibration In-situ balancing of rotors
Guidance,safeguards and reporting
1 Scope
This International Standard gives guidance and safeguards that
shall be adopted when balancing rotors installed intheir own
bearings on site. It addresses the conditions under which it is
appropriate to undertake in-situ balancing,the instrumentation
required, the safety implications and the requirements for
reporting and maintaining records.The standard may be used as a
basis for a contract to undertake in-situ balancing.
This International standard does not provide guidance on the
methods used to calculate the correction massesfrom measured
vibration data.
2 Normative references
The following referenced documents are indispensable for the
application of this document. For dated references,only the edition
cited applies. For undated references, the latest edition of the
referenced document (includingamendments) applies.
ISO 1925, Mechanical Vibration Balancing Vocabulary
ISO 2041, Vibration and shock Vocabulary
ISO 2954, Mechanical vibration of rotating and reciprocating
machinery - Requirements for instruments formeasuring vibration
severity.
ISO 7919 (All parts), Mechanical vibration of non-reciprocating
machines Measurements on rotating shafts andevaluation
criteria.
ISO 10816, (All parts) Mechanical vibration Evaluation of
machine vibration by measurements on non-rotatingparts.
IS0 10817-1, Rotating shaft vibration measuring systems Part 1:
Relative and absolute sensing of radial vibration.
3 Terms and definitions
For the purpose of this International Standard, the terms and
definitions given in ISO 2041 and ISO 1925 apply.
4 In-situ balancing
4.1 General
In-situ balancing is the process of balancing a rotor in its own
bearings and support structure, rather than in abalancing machine.
(This is the same definition as field balancing in ISO 1925:2001,
but in-situ balancing is easierto understand and will be used in
the future.)
For in-situ balancing, correction masses are added to the rotor
at a limited number of conveniently engineered andaccessible
locations along the rotor. By so doing the magnitude of shaft and
or pedestal vibrations and/or
-
7/27/2019 DIS 20806 balancing.pdf
8/30
ISO/DIS 20806
8 ISO 2002 All rights reserved
unbalance will be reduced to within acceptable values so that
the machine can operate safely throughout its wholeoperating
envelope. In certain cases, machines that are very sensitive to
unbalance may not be successfullybalanced over the complete
operating envelope. This usually occurs when a machine is operating
at a speed closeto a lightly damped system mode, (see ISO 10814),
and has load dependent unbalance.
Unlike balancing in a specially designed balancing machine,
in-situ balancing has the advantage that the rotor isinstalled in
its working environment. Therefore there is no compromise with
regard to the dynamic properties of itsbearings and support
structure, nor from the influence of other elements in the complete
rotor train. However, it hasthe large disadvantage of restricted
access and the need to operate the total machine. Restricted access
may limitthe planes at which correction masses can be added and
using the total machine has the commercial penalties ofboth down
time and running costs. Where gross imbalance exists it may not be
possible to balance a rotor in-situdue to limited access to balance
planes and the size of correction masses available.
Most sites have limited instrumentation and data processing
capabilities, when compared to a balancing facility andadditional
instrumentation is often required to undertake in-situ balancing.
In addition, the potential safetyimplications of running a rotor
with correction masses need to be taken into account.
4.2 Reasons for in-situ balancing
Although individual rotors can be correctly balanced, as
appropriate, in a high or low speed balancing machine, in-situ
balancing may be required when the rotors are coupled into the
complete rotor train. This could be due to arange of differences
between the real machine and the isolated environment in the
balancing machine, including:
A difference in the rotor supports dynamic characteristics
between the balancing facility and the installedmachine.
Assembly errors, which occur during the installation of the
machine in-situ.
Rotor systems that cannot be balanced prior to assembly.
A changing unbalance state of the rotor under full functional
operating conditions.
Balancing may also be required to compensate for in-service
changes to the rotor, including:
Wear
Loss of components, such as rotor blade erosion shields
Repair work, where components could be changed or replaced
Movement of components on the rotor train causing unbalance,
such as couplings, gas turbine discs, andgenerator end rings
Additionally in-situ balancing may be necessary due to a range
of economic and technical reasons, including:
The investment in a balancing machine cannot be justified
A suitable balancing machine is not available in the correct
location or at the required time
It is not economic to dismantle the machine and transport the
rotor(s) to a suitable balancing facility
5 Criteria for in-situ balancing
Machines under normal operation and/or during speed variations,
following remedial work, or after commissioningmay have
unacceptable magnitudes of vibration when compared with normal
practice, contractual requirements, orstandards such as ISO 10816
and ISO 7919. In many cases it may be possible to bring the machine
to withinacceptable vibration magnitude by in-situ balancing.
-
7/27/2019 DIS 20806 balancing.pdf
9/30
ISO/DIS 20806
ISO 2002 All rights reserved 9
Prior to in-situ balancing a feasibility study shall be carried
out to assess if the available correction planes aresuitable to
influence the vibration behaviour being observed, since limited
access to correction planes andmeasurement points on the fully
built up machine may make in-situ balancing impractical. Where
possible,experience from previous in-situ balancing should be used.
Sometimes modal analysis may be required.
High vibrations shall always be corrected at their source and
in-situ balancing shall only be attempted inthe following
circumstances:
The reasons for the high vibrations are understood or, after
analysis of the vibration behaviour, itis judged that balancing is
a safe and practical approach.
Under the required normal operating conditions the vibration
vector shall be steady andrepeatable prior to in-situ
balancing.
The addition of corrections masses will only affect the once per
revolution component of vibrationand therefore in-situ balancing
shall only be considered if this is a significant component of
theoverall vibration magnitude.
In special circumstances, where the once per revolution
vibration component changes during normal operation ofthe machine,
such as thermally induced bends in generator rotors, it may be
possible to optimise the vibrationmagnitude across the operating
envelope by adding correction masses. Here, the vibration magnitude
at full speedno load may be compromised to obtain an acceptable
vibration magnitude at full load. Again this shall only beattempted
if the reasons for the unbalance are fully understood.
NOTE 1 When systems are operating in a non-linear mode
correction masses can affect other shaft components, including
bothsub and high shaft speed harmonics.
NOTE 2 The once per revolution component of vibration may not
originate from unbalance but be generated from system forcessuch as
those seen in hydraulic pumps and electric motors. Many defects,
such as shaft alignment errors and tilting bearings,can also
contribute to the once per revolution component of vibration. Such
effects should not normally be corrected bybalancing, since
balancing may be effective at only a single speed and could mask a
real system fault.
6 Safeguards
6.1 General
In-situ balancing can place the total machine and staff at risk.
Therefore, it shall only be undertaken by askilled team, including
both customer and supplier, who understand the consequences of
adding trial andcorrection masses and have experience of operating
the machine.
6.2 Safety of personnel while operating close to a rotating
shaft
While undertaking in-situ balancing the machine may be operated
under special conditions, allowing access torotating components to
add trial and final correction masses. Strict safety procedures
shall be in place to ensurethat the machine cannot be rotated while
personnel have access to the shaft and no temporary equipment
canbecome entwined when the shaft is rotated.
6.3 The special operating envelope for in-situ balancing
Machines may be quickly run up and run down many times during
the in-situ balancing exercise, which may beoutside a machine's
normal operating envelope. It shall be established that this will
not be detrimental to theintegrity or the life of the total
machine.
6.4 Integrity and design of the correction masses and their
attachments
When trial and correction masses are added it shall be confirmed
that they are securely attached and theirmountings are capable of
carrying the required loads. The correction masses shall not
interfere with normal
-
7/27/2019 DIS 20806 balancing.pdf
10/30
ISO/DIS 20806
10 ISO 2002 All rights reserved
operation, such as coming in contact with stationary components
due to shaft expansion. The correction massesshould be fitted in
accordance with the manufacturers instructions, if available.
Correction masses are often attached with bolts or by welding.
It shall be ensured that the bolt holes or the weldingprocess do
not compromise the integrity of the rotor component to which the
correction masses are attached or the
function of the component, such as cooling. Further, correction
masses shall be compatible with their operatingenvironment, such as
heat and chemical atmosphere.
6.5 Machinery specific safety implications
General safety requirements associated with in-situ balancing
are discussed above, but additional considerationsfor specific
machine types are given in Annex A.
7 Measurements
7.1 Vibration measurement equipment
Basic procedures for the evaluation of vibration by means of
measurements made directly on the rotating shaftshall comply with
ISO 7919-1 and the measurement system shall comply with ISO
10817-1. Measurementprocedures for transducers mounted on the
pedestal shall comply with ISO 10186-1 and the measurement
systemshall comply with ISO 2954. Either system shall have
sufficient frequency range to capture data for the full speedrange
over which the machine is to be balanced. The transducers shall
have the necessary sensitivity and belocated at the appropriate
positions to measure the effects of the correction masses. In
general, on flexible supportstructures pedestal measurements give
the best results and on rigid supports, shaft relative transducers
will bemore responsive. However, when using the signals from
eddy-current probes (as often permanently installed inturbo
machinery for vibration monitoring purposes) for non-contact shaft
vibration measurements, the once-per-revolution signals of the
unbalance measurement may be superimposed by erroneous but
speed-frequent signalcomponents. These resulting from mechanical
and/or electrical runout of the machine shaft. If available,
shaftabsolute measurement can be used, which provides a shaft
position independent of the pedestal movement.
Standards ISO 7919 and ISO 10816 are concerned with the overall
vibration magnitude for acceptance criteria. Forbalancing the
vibration measurement equipment shall have the additional facility
to extract the once per revolutioncomponent of vibration, giving
both amplitude and phase.
Where in-situ balancing is being undertaken to reduce the
vibration magnitude at the operating speed and whilepassing through
the system resonances, during run up and run down, the measurement
equipment shall besufficiently accurate in both magnitude and phase
to cover the full speed range under consideration.
Vibration shall be measured at selected locations where it is
necessary to reduce its magnitude. However,balancing may improve
the vibration magnitude at other locations or directions at the
expense of another.Therefore, it is recommended to have additional
transducers on adjacent rotors or bearings. For monitoring,
vibration may be only measured in the vertical direction on the
pedestal, but when in-situ balancing, it would beadvisable to
measure both vertical and horizontal vibration.
Where installed transducers are used it is advisable to check
their calibration, in both magnitude and phase,immediately prior to
balancing. Permanently installed shaft relative transducers are not
normally checked forcalibration but a phase and shaft run out check
would be advisable.
In some cases, it may be useful to measure the full orbit of
vibration and in this instance it is necessary to havepairs of
transducers at selected axial measurement locations along the
shaft. Strictly, it is only necessary to havetwo non-parallel
transducers to describe the orbit, however orthogonal pairs are
usually used.
7.2 Measurement errors
Any measurement is subject to error, which is the difference
between the true and the measured values. Thedifference is called
the error of measurement and, in balancing, this is caused by a
combination of systematic,randomly variable and scalar errors.
Systematic errors are those when both magnitude and phase of the
balance
-
7/27/2019 DIS 20806 balancing.pdf
11/30
ISO/DIS 20806
ISO 2002 All rights reserved 11
error can be evaluated by either calculation or measurement.
Random errors are those when both the magnitudeand phase of the
balance can vary unpredictably and scalar errors occur when the
magnitude of the balance canbe evaluated or estimated but the angle
is undefined.
ISO 1940-2 gives examples of typical errors that can occur in
the field of balancing and provides procedures for
their determination. Some of the examples presented are for the
balancing facility, but many are applicable to in-situ
balancing.
The limit for these errors shall be matched to the acceptance
criteria of the in-situ balancing, as agreed betweenthe supplier
and the customer (see clause 9).
7.3 Phase reference signals
7.3.1 General
A phase reference mark, such as a keyway or reflective tape, is
usually placed on the shaft or any synchronouspart and is detected
by a transducer mounted on a non-rotating component, such as a
bearing pedestal. This
provides a once per revolution signal from which the phase can
be measured.
Sometimes the reference mark is permanently installed. The
reference mark, such as a keyway or markings on theshaft, shall be
clearly documented and, if possible, visible to allow correction
masses to be accurately placed.
In addition, the direction of shaft rotation shall be
established so that phase angles, with or against rotation, can
betranslated into the appropriate correction mass locations.
Measured angles with rotation (phase lead) will requirecorrection
masses to be located in the direction of rotation from the leading
edge of the phase mark. Anglesmeasured against rotation (phase lag)
will require the correction mass to be located against the
direction of rotationfrom the leading edge of the phase mark.
Alternative phase definitions can be adopted but whatever system
is used it shall be clearly defined and it is goodpractice to
ensure that the phase angle used for the location of the correction
mass is consistent with the phase
angle of the once per revolution vibration.
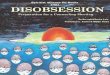
7.3.2 Information required for reproducible phase reference
data
The position of the shaft phase reference shall be consistently
defined to provide accurate records so that previousand future
in-situ balancing data can be compared (see clause 10). The pulse
generated by the shaft mark shall besharp so that different trigger
levels will not lead to inaccurate phase measurements. The
sinusoidal type signal,Figure 1, can give a trigger time dependent
on the level of the trigger setting but the sharp pulse, Figure 2,
will givea trigger time independent of the trigger voltage setting.
Triggering shall be from the leading edge of the pulse, foreither
negative or positive going pulses, (either negative or positive
slope). Triggering on the trailing edge couldlead to significant
phase errors, since the pulse width may not reflect the width of
the phase mark and may dependon the pulse signal conditioning.
-
7/27/2019 DIS 20806 balancing.pdf
12/30
ISO/DIS 20806
12 ISO 2002 All rights reserved
Trigger level 2
Trigger level 1Time of trigger level 2
Time of trigger level 1
Time
Tachometer
signals
Figure 1 Bad phase reference signal where a change in trigger
level will cause a change in the time of zerophase
Trigger level 2
Same time for trigger levels 1 and 2
Tachometersignals
Trigger level 1
Time
Figure 2 Good phase reference signal that will give a time for
zero phase independent of trigger level
7.3.3 Phase data when using trial masses as the phase
reference
If the in-situ balancing process adopted uses a trial correction
mass or set as the initial run and all subsequent runsare compared
with this, it may not be necessary to have a detailed knowledge of
the phase reference signal, asdescribed in section 7.3.2. All
correction mass locations will be relative to the position of the
initial trial mass(es)and errors introduced by the measurement
system will have less significance.
However, using the trial mass(es) phase reference approach, the
same equipment and trigger settings shall beused throughout the
whole in-situ balancing exercise and the phase data collected may
have no significancerelative to previous or future data. In
addition, the position of the initial trial correction mass(es) may
increase thevibration magnitude. This could be unacceptable for a
machine that is already operating at a high vibrationmagnitude.
-
7/27/2019 DIS 20806 balancing.pdf
13/30
-
7/27/2019 DIS 20806 balancing.pdf
14/30
ISO/DIS 20806
14 ISO 2002 All rights reserved
10.2.2 Objective
Reports for all classes of machine shall clearly outline the
objective for the in-situ balancing exercise. Normally thereason
for balancing will be to reduce the vibration levels to acceptable
levels but in special circumstances it maybe necessary to reduce
the unbalance to permissible limits.
10.2.3 Machine details
In some cases a schematic diagram of the total machine being
balanced should be provided, indicating all therotors and the
location of the thrust and support bearings. All vibration
transducer locations and directions shall beclearly shown, plus the
position and orientation of the phase reference mark. The direction
of shaft rotation shallalso be included with respect to the viewing
direction along the shaft.
Where more complex features are incorporated in the machine
design that effect the balance condition, these shallbe
highlighted.
10.3 Vibration measurement equipment
Details of all equipment used for the vibration measurements
shall be recorded. Transducers used shall be clearlydocumented,
showing their type, serial numbers, sensitivities, locations and
orientations.
10.4 Results
All data provided shall be presented with its measurement units,
for example:
m pk-pk
m 0-pk
mil pk-pk
Vibrationdisplacement
mil 0-pk
mm/s rmsVibration velocity
mil/s rms
gCorrection mass
lb
mmCorrection mass
radiusin
NOTE Vibration units highlighted are those adopted by ISO7919
and ISO 10816
10.4.1 Correction masses
The complete configuration of each correction mass shall be
presented giving:
axial location along the shaft
radial location
magnitude of the installed correction mass
-
7/27/2019 DIS 20806 balancing.pdf
15/30
ISO/DIS 20806
ISO 2002 All rights reserved 15
angle relative to the phase reference position
This data can be presented in either a graphical or tabular
form, as appropriate, showing any existing masses,where these are
present. Mass data for the final configuration shall always be
provided, but with complex balancingexercises, where a number of
runs took place, it may be appropriate to present the balance mass
configurations for
each run, subject to agreement between the supplier and the
customer.
Note 1 The phase angle convention (lead or lag) for the
attachment of the correction masses shall be defined.
Note 2 It is recommended to distinguish between the original
correction masses already on the rotor and those added during
thein-situ balance exercise.
10.4.2 Tabular data : Vibration results and correction mass
configurations
Vibration measurements for the initial run and at least the
final run shall be presented in tabular form. This shallinclude the
overall magnitude of the vibration and its once per revolution
amplitude and phase at eachmeasurement location. This shall be
provided at the normal operating speed and at any other speed where
thevibration is of concern, normally while passing through critical
speeds. With complex balancing exercises, where a
number of runs are required, it may be appropriate to present
all the vibration data together with correction massconfigurations
for each run, subject to agreement between the supplier and the
customer.
The phase angle convention (lead or lag) for the attachment of
the correction masses shall be defined.
10.4.3 Graphical data
10.4.3.1 Vibration vector changes
Polar plots, showing the vector changes from the initial to the
final balancing run of the once per revolutionvibration, in
amplitude and phase may complement the tabular data for each
relevant measurement position.Where multiple balancing runs are
used, the progressive vector changes may be appropriate, subject to
agreement
between the supplier and the customer. For constant speed
machines the vibration vector changes (from the initialto final
balance runs) at the normal operating speed shall be shown.
However, if other speeds are important, suchas passing through
shaft critical speeds, it may be necessary to include these vector
changes as well.
Influence coefficients may be required in special circumstances,
subject to agreement between the supplier and thecustomer.
10.4.3.2 Vibration signatures
Wherever possible, pre and post balancing data showing the once
per revolution vibration, in amplitude and phase,should be included
for relevant measurement locations over the full operating
envelope, run up, loading, steadystate and run down. In addition,
it would normally be necessary to present the overall vibration
magnitude toconfirm that the reduction in the once per revolution
amplitude has been sufficient to ensure that the overallacceptance
criteria have been satisfied.
10.5 Text information
10.5.1 General
The quantity of descriptive text required for the reporting
should be minimal, but sufficient to explain the presenteddata.
10.5.2 Discussion
A discussion shall be included to explain and summarise the
steps taken to add the mass corrections and highlightsignificant
events that took place during the balancing runs.
-
7/27/2019 DIS 20806 balancing.pdf
16/30
ISO/DIS 20806
16 ISO 2002 All rights reserved
10.5.3 Conclusion
Significant results shall be stated and the post balancing
results compared to the appropriate acceptance criteria.
10.5.4 Recommendations
Any recommended actions resulting from the in-situ balancing
shall be highlighted.
-
7/27/2019 DIS 20806 balancing.pdf
17/30
ISO 2002 All rights reserved 17
Table 1 In-situ balancing reporting. This table provides broad
guidance of normally acceptable levels of reporting rela
Type of machine Size Background Machine details
Instrumentationdetails
Results
Correctionmass(es)
Tabular
Section 10.2.1 10.2.3 10.3 10.4 1 10.4.2
1MW Yes - Yes(1) Yes Yes
1MW Yes - Yes(1) Yes Yes
1MW Yes Yes Yes Yes Yes
40MW Yes Yes Yes Yes Yes
40MW Yes Yes Yes Yes Yes
10MW Yes Yes Yes Yes Yes
NOTE 1 If a supplementary installation is used to perform the
balance, the instrumentation details shall be reported.
-
7/27/2019 DIS 20806 balancing.pdf
18/30
ISO 2002 All rights reserved 18
Annex A(informative)
Precautions and safeguards for specific machine types during
in-situbalancing
It is not possible to define all safety precautions associated
with operating rotating machines for in-situ balancing,however,
some key considerations are highlighted here for specific machine
types.
Machine type Examples Considerations
Turbines Steam and gas
turbines
Before a turbine shaft is stopped to add correction masses or
establish
phase signal references, it shall be confirmed that the correct
procedures
are undertaken to prevent bending of the shaft. This will
normally involve
barring for a period of time to reduce the shaft
temperature.
The rotor life may be related to the number of machine starts
and this
needs to be considered in relation to the starts required for
the in-situ
balancing runs.
Electric motors Motors for large
fans
Some electric motors have restrictions on the number of starts
per hour
and this shall not be exceeded.
Electric motors may run from zero to full speed with no
intermediate
control. Trial masses shall be of a size that will not cause
damage to the
machine, even if placed in the wrong position.
Pumps Main boiler feed
pumps
Some pumps need to be full of fluid for their safe operation and
in-situ
balancing runs will not generally be an exception.
Large fans Large induced and
forced draft fans
During the in-situ balancing runs the flow induced by the fan
shall be
correctly accommodated. For example dampers may need to be shut
and
this may place the fan under stall conditions.
The fans may be pumping hot or hazardous fluids and personnel
shall not
be allowed to enter the fan to add correction masses until
conditions are
safe.
Electrical generators Large hydrogen
cooled electricalgenerators driven
by steam or gas
turbines
The considerations related to the turbines apply also to the
generators.
For easy access to the in-situ balancing planes, it may be
advisable to
run the generator in air instead of hydrogen; however, most
generators
have restrictions on the maximum running speed and duration of
the in air
runs, even at no-voltage and no-load.
It shall be established that the seal oil system would provide
adequate
lubrication of the gland seals when the generator is running in
air.
For easy access to the in-situ balancing planes, it may be
necessary to
dismantle some of the internal baffling of the cooling circuit;
consideration
shall be given to the effect of such modifications on the
generator cooling
and cleanness
-
7/27/2019 DIS 20806 balancing.pdf
19/30
ISO/DIS 20806
ISO 2002 All rights reserved 19
Annex B(informative)
Sample in-situ balancing report for a boiler fan
-
7/27/2019 DIS 20806 balancing.pdf
20/30
ISO/DIS 20806
20 ISO 2002 All rights reserved
B.1 Background
Unit 2 PA fan, 2A, has had a history of blade tip erosion,
leading to debris accumulating inside the blade section.The fan has
now been cleaned and the blade tips repaired and balancing is
required to correct for unbalance
introduced by this work.
B.2 Objective
To reduce the vibration levels, as measured on the pedestals, to
levels that are suitable for continuos long termoperation.
B.3 Instrumentation
Portable instrumentation was used to undertake this balancing,
with a single transducer being used for all locations.
B.3.1 Vibration Transducers
Manufacturer Type Serial Number Sensitivity Location (If
applicable)
Orientation
B.3.2 Phase Reference Transducers
Manufacturer Type Serial Number Location Orientation
B.3.3 Analysis system
Manufacturer Type Serial Number Date of last calibration
-
7/27/2019 DIS 20806 balancing.pdf
21/30
ISO 2002 All rights reserved 21
B.3.4 Results
Date Time Speed Non drive end pedestal Drive end pedestal
Vertical Horizontal Vertical Hor
rpm Overall First shaft order Overall First shaft order Overall
First shaft order Ove
mm/s
rms
mm/s
rms
Phase
lag
degrees
mm/s
rms
mm/s
rms
Phase
lag
degrees
mm/s
rms
mm/s
rms
Phase lag
degrees
mm
rms
11/01/02 20:05 600 13.5 13.3 8 8.9 8.7 264 12.9 12.6 9 8.1
11/01/02 21:50 600 9.3 9.2 343 7.2 7.0 236 9.1 9.0 340 6.3
11/02/02 23:30 600 2.4 2.3 7 1.8 1.6 265 1.7 1.6 11 1.0
Table B1Vibration data from the balancing of 2A PA fan
The phase reference signal and horizontal vibration transducers
were measuring in the same direction.
-
7/27/2019 DIS 20806 balancing.pdf
22/30
-
7/27/2019 DIS 20806 balancing.pdf
23/30
ISO 2002 All rights reserved 23
0
10
20
30
40
50
60
708090100
110
120
130
140
150
160
170
180
190
200
210
220
230
240
250260 270 280
290
300
310
320
330
340
350
Non drive end Vertical
Non drive end Horizontal
Angle phase lag
Maximum radius
15 mm/s rms
0
10
20
30
40
50
60
708090100
110
120
130
140
150
160
170
180
190
200
210
220
230
240
250260 270 280
290
300
310
320
330
340
350
Drive end Vertical
Drive end Horizontal
Angle phase lag
Maximum radius
15 mm/s rms
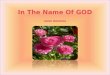
Figure B1 Drive end and non-drive pedestal vibrations (Not
generally necessary for small fans of this size.)
-
7/27/2019 DIS 20806 balancing.pdf
24/30
ISO/DIS 20806
24 ISO 2002 All rights reserved
Annex C(informative)
Sample balancing report for a large, >40 MW, turbine
generator
Ref: XXXX
Date:
To:
Mr J Smith Station Manager XXXXX Power Station
Prepared by:
Mr D Brown XXXXX Balancing Services Ltd
Approved by:
Mr S Daves
Turbine Generator Group Manager
Subject:
XXXXX Power Station
Unit 2 Turbine generator
In-situ Balancing following return to service, 11 January
2002
Conclusion
The in-situ balancing was successfully carried out reducing the
vibration magnitude on the LP pedestal bearings towithin Zone B of
ISO 10816. Part 2.
Copies to:
Mr R McWhannel XXXX Power Station
Task Number
Number of pages
Number of tables
Number of figures
-
7/27/2019 DIS 20806 balancing.pdf
25/30
ISO/DIS 20806
ISO 2002 All rights reserved 25
C.1 Background
Unit 2 turbine generator at XXXX Power Station returned from a
major overhaul. During the overhaul the LP (Lowpressure) rotors had
work carried out on their last stage blades. Although these rotors
where low speed balanced,
higher than acceptable vibration magnitudes were measured on the
bearings supporting the LP rotors. Suchbehaviour is common on this
class of machine and is normally attributed to concentricity errors
associated with anunsupported dumbbell shaft joining the two LP
rotors. An in-situ balance exercise was requested to correct for
theunbalance introduced by this concentricity error.
C.2 Objective
To reduce the vibration levels, as measured on the pedestals, to
levels that are suitable for continuos long termoperation at normal
operating speed. Vibration levels while passing through system
resonances under transientspeed conditions shall also remain within
acceptable limits.
C.3 Machine details
The 350 MW, 3000 rpm machine comprises of an HP (High pressure
turbine), IP (Intermediate pressure turbine)and two LPs (Low
pressure turbine) coupled to a hydrogen cooled generator and an
exciter. The bearingsmonitored during the return to service were as
follows:
Bearing number Machine position
4 IP rear
5 LP1 forward
6 LP1 rear
7 LP2 forward
8 LP2 rear
9 Generator forward
C.4 Instrumentation
Vibration data from temporary installed velocity transducers was
analysed and stored using a portable datacollector. This provided
both real time and archive facilities, giving the overall magnitude
of vibration and the onceper revolution amplitude and phase.
A permanently installed shaft reference was used, which is
installed at the exciter in a horizontal direction on theright hand
of the machine, looking from the HP end. The direction of rotation
is anti-clockwise looking from thesame end.
Analyser type: ________Analyser Serial Number: _______ Date of
last calibration: ________
Vibration transducers
-
7/27/2019 DIS 20806 balancing.pdf
26/30
ISO/DIS 20806
26 ISO 2002 All rights reserved
Channel Manufacturer Type Serial Number Sensitivity Location
Bearing No Orientation
1 4 Vertical
2 4 Horizontal
3 5 Vertical
4 5 Horizontal
5 6 Vertical
6 6 Horizontal
7 7 Vertical
8 7 Horizontal
9 8 Vertical
10 8 Horizontal
11 9 Vertical
12 9 Horizontal
Horizontal is at the half joint on the right hand side of the
machine as viewed from the HP end and the phasereference transducer
is this same direction. The vertical position is on the top of the
bearing.
Phase reference transducer
Manufacturer Type Serial Number Location Orientation
Adjacent to bearing 4 Horizontal
C.5 Results
C.5.1 Correction masses
The final correction mass configuration was 0.6 kg at a 30 mm
radius on the bearing 6 end dumbbell coupling and2.0 kg at a 30 mm
radius on the bearing 7 end, both at zero phase relative to the
shaft marker. No previouscorrection masses were found.
Note: Only sample results will be presented for this example,
not the complete set as would be expected in the full report.
-
7/27/2019 DIS 20806 balancing.pdf
27/30
ISO/DIS 20806
ISO 2002 All rights reserved 27
C.5.2 Tabular data
Date Time Condition Speed Bearing 7
Vertical Horizontal
Overall First shaft order Overall First shaft order
mm/srms
mm/srms
phaselagdegrees
mm/srms
mm/srms
phaselagdegrees
11/01/02 20:05 Initial 3000 14.0 13.7 310
12/01/02 08:50 Final 3000 3.7 3.3 302
C.5.3 Vector changes
0
10
20
30
40
50
60
708090100
110
120
130
140
150
160
170
180
190
200
210
220
230
240
250260 270 280
290
300
310
320
330
340
350
Maximum radius
15 mm/s rms
Angle phase lag
Bearing 7 Vertical
Figure C1 Vibration vector change for bearing 7 vertical
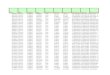
C.6 Vibration Signatures
(In some circumstances it may be necessary to show changes in
vibration during a full loading cycle, includingthe run up, raise
to full operational load at normal operational speed and the
subsequent rundown. Here onlythe rundown is presented.)
-
7/27/2019 DIS 20806 balancing.pdf
28/30
ISO/DIS 20806
28 ISO 2002 All rights reserved
0.0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
16.0
0 10 20 30 40 50 60
Frequency / Hz
Amplitude/mm/srms
Unbalanced
Balanced
Figure C2 Vibration amplitude during rundown from bearing 7
vertical
Figure C3 Vibration phase during rundown from bearing 7
vertical
-180
-130
-80
-30
20
70
120
170
0 10 20 30 40 50 60
Frequency / Hz
Phase/Degrees
Unbalanced
Balanced
-
7/27/2019 DIS 20806 balancing.pdf
29/30
ISO/DIS 20806
ISO 2002 All rights reserved 29
C.7 Discussion
The key problem of this machine was the high magnitudes of
vibration during run down at around 1200 rpm (20 Hz)and 2880 rpm
(48 Hz). The in-situ balancing successfully reduced the magnitude
of vibration at both these peaksand at the normal operating speed
of 3000 rpm (50 Hz).
-
7/27/2019 DIS 20806 balancing.pdf
30/30
ISO/DIS 20806
Bibliography
[1] ISO 1940-1, Mechanical vibration Balance quality
requirements for rotors in a constant (rigid) state Part1:
Specification and verification of balancing tolerances
[2] ISO 1940-2, Mechanical vibration - Balance quality
requirements of rigid rotors - Part 2 Balance errors
[3] ISO 10814 Mechanical vibration - Susceptibility and
sensitivity of machines to unbalance
[4] ISO 11342, Mechanical vibration Methods and criteria for the
mechanical balancing of flexible rotors
[5] ISO 19499, Mechanical vibration Balancing and to balancing
standards - Introduction


























![]Dis[ Placement](https://img.pdfslide.us/doc/110x75/568bda3a1a28ab2034aa00fe/dis-placement.jpg)