Embed Size (px)
Citation preview

DigitalControl:Part2
ENGI7825:ControlSystemsIIAndrewVardy

Mappingthes-planeontothez-plane• We’realmostreadytodesignacontrollerforaDTsystem,howeverwewillhavetoconsiderwherewewouldliketopositionthepoles
• Wegenerallyunderstandhowtopositiondesirablepolesinthes-plane– Althoughthisdoesremainssomewhatofa“blackart”astherearevariousarbitrarychoicesandrules-of-thumbatplay
• Ifweunderstandhowtopositionpolesinthez-planewecandodirectdigitaldesign.Alternatively,wecanpositionpolesinthes-planeandthenfindoutwheretheylieinthez-plane.

• Wehavealreadyseenthatpolesinthes-planeandz-planearerelatedby
• We’llconsiderparticularmappingsfrompartsofthes-plane.Wehavealreadyseenthatthej! axiscorrespondstotheunitcircleinthez-plane.Inthefollowing,s=σ +jω andω =0.
• Fundamentally,thereisalimitationonthesignalfrequencythatcanberepresentedbythez-transform.Thatlimitisω =ωs /2whereωs =2π /T.

• Thatportionofthej! axiswhichliesintherange[-jωs/2, jωs/2]mapsontotheunitcircle.
• Sopolesontheunitcircleinthez-planecorrespond topuresinusoidsandtherefore signifyamarginallystablesystem.
• Aswehavealreadyseen, polesinsidetheunitcirclecorrespond toexponentiallydecayingsinusoids. Ifallpolesliewithintheunitcirclethenwehaveasymptoticstability.Polesoutside theunitcirclecorrespond toexponentiallygrowingsinusoids, andtherefore instability.

Fors=σ +jω ifσ isheldconstant(letssaywesetittoavalueofσ1)andω isallowedtovaryweget
Thiscorresponds tovertical linesinthes-planeandcirclesinthez-plane(includingtheunitcircle).

Whatifwedotheopposite? Thatis,fors=σ +jω weholdω constant(atω1)ifσ isallowedtovaryallowedtovaryweget
Thiscorresponds tohorizontallinesinthes-planeandraysemanatingfromtheorigininthez-plane.

Letsconsiderpairsofpoles locatedats=σ ± jω.Weknowthatsuchapolepaircorrespondstoatermoftheformke σt cos(ωt +ψ).Wecanalsodefine thispairofpoles inpolarcoordinates as(r,±θ)asbelow:
Inparticularwewouldliketopositionthepolesofasecond-ordersystemwhichhavethefollowinglocations:
Nowtranslatetothez-plane:
Wecanthensolvefortherelationship between (r,±θ)and(ζ,ωn):

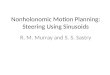
566 Chapter 8 Digital Control
Im(z)
1.2
1.0 7=eTs s=-Yw +J·wVl - y2
11 - n S T = Sampling period
0.8 1---------lr------""7I\<-
0.6 I------,l'---
0.4 ..... :;k,
0.2
7r wn = T __
- LO -0.8 - 0.6 -0.4 - 0.2 o 0.2 0.8 LO Re(z)
Figure 8.4 Natural frequency (solid color) and damping loci (light color) in the z-plane; the portion below the Re(z)-axis (not shown) is the mirror image of the upper half shown
Nyquistfrequency = ws / 2 7. Frequencies greater than ws/2, called the Nyquist frequency, appear in the z-plane on top of conesponding lower frequencies because of the circular character of the trigonometric functions imbedded in Eq. (8.10). This overlap is called aliasing or folding. As a result it is necessary to sample at least twice as fast as a signal's highest frequency component in order to represent that signal with the samples. (We will discuss aliasing in greater detail in Section 8.4.3.)
To provide insight into the correspondence between z-plane locations and the resulting time sequence, Fig. 8.5 sketches time responses that would result from poles at the indicated locations. This figure is the discrete companion of Fig. 3.15.
8.2.4 Final Value Theorem The Final Value Theorem for continuous systems, which we discussed in Section 3.1.6, states that
lim X(/) = Xss = lim sX(s), 1-+00 s-+o
(8.11)
as long as all the poles of sX(s) are in the left half-plane (LHP). It is often used to find steady-state system errors and/or steady-state gains of portions of a control
Therelationships between z-planepole locations and(ζ,ωn)issomewhatcomplex,geometrically:

These relationships between the locationsofapolepairat(r,±θ)inthez-planeandsecondordersystemparameters (ζ,ωn)allowusthentorelatepole locations to“bossparameters”suchas%OSandsettling time.
Example:
WehaveaDTsystemwiththefollowingclosed-loop characteristic polynomial:
Getthepole locations inthez-plane intermsof(r,±θ)thenobtainthe2nd orderparameters(inthisexampleT=1swhichisratherslow):

Theexamples belowillustrate 4differentconfigurationsofs-planeandcorrespondingz-planepole locationsandtheresulting signalsproduced.

[m(z)
/-1 /
Figure 8.5
8.2 Dynamic Analysis of Discrete Systems
a /
Re(z)
567
Time sequences associated with poi nts in the z-plane
Final Value Theorem for discrete systems
system. We can obtain a similar relationship for discrete systems by noting that a constant continuous steady-state response is denoted by Xes) = A/s and leads to the multiplication by s in Eq. (8.11). Therefore, because the constant steady-state response for discrete systems is
A X(z) = I' 1- C
the discrete Final Value Theorem is
lim x(k) = Xss = lim(l - Z-I)X(Z) k-+oo z-+ 1
(8.12)
if all the poles of (1 - Z - J )X (z) are inside the unit circle. For example, to find the DC gain of the transfer function
X(z) 0.58(1 + z) G(z) = V(z) = z + 0.16 '
ThefollowingplotfromFranklingivesasimilarpicture:

DigitalStateFeedbackDesign
• Statefeedbackcanbeappliedtosampleddatasystemsinalmostexactly thesamewayasforCTsystems– Theonlyrealdifferenceisthatweplaceeigenvaluesinthez-plane,notthes-plane
• Weproceedbyexample.Assumewehavethefollowingservomotorsystem(again):
0Zero-OrderHold

Intheprevious setofnoteswedeveloped thefollowingdiscretizedstate-spacemodelforthissystem:
x1(k)represents theangleofthemotorshaft (measureable byencoder count).x2(k)represents theshaftspeed (measureable byatachometer, rategyro,orbyrateofencodercounts).
Itisimportanttoconsiderwhether thestatevariables aremeasureablebecauseotherwise full-state feedback cannotbeapplied.

STATE FEEDBACK CONTROL LAW 235
The chapter concludes by illustrating the use of MATLAB for shapingthe dynamic response and state feedback control law design in the contextof our Continuing MATLAB Example and Continuing Examples 1 and 2.
7.1 STATE FEEDBACK CONTROL LAW
We begin this section with the linear time-invariant state equation
x(t) = Ax(t) + Bu(t)
y(t) = Cx(t) (7.1)
which represents the open-loop system or plant to be controlled. Ourfocus is on the application of state feedback control laws of the form
u(t) = −Kx(t) + r(t) (7.2)
with the goal of achieving desired performance characteristics for theclosed-loop state equation
x(t) = (A − BK )x(t) + Br(t)
y(t) = Cx(t) (7.3)
The effect of state feedback on the open-loop block diagram of Figure 1.1is shown in Figure 7.1.
The state feedback control law (7.2) features a constant state feedbackgain matrix K of dimension m × n and a new external reference input r(t)necessarily having the same dimension m × 1 as the open-loop input u(t),as well as the same physical units. Later in this chapter we will modify
+ + + +
+−
A
CB
D
K
r(t) u(t) x(t) x(t) y(t)
x0
•
FIGURE 7.1 Closed-loop system block diagram.
Hereisourusualpictureofastatefeedbackcontroller:
Thisexamplediffersinthatithasbeendiscretized,butalso inthatthegoalistosetthemotor’sshaftangletozero.Thatmakesthiscontrolleraregulator.Aregulator isacontrollerorcompensatorthatworkstomoveoneorallstatevariablestozero.Sowecansaythere isnor(t),orequivalently thatr(t)=0.
Inregulatordesign(forn=2)the inputtotheplant isdefinedas

Problemspecification: Reducesettling timeto4seconds. (Nothingelse ismentionedwhichmeanswedon’tparticularlycareaboutotherspecifications suchas%OS).
Startbylookingattheopen-loopsystemanditscharacteristics. Wewillneedthecurrentcharacteristic polynomial (computedasusualexceptthatweuse|zI – A|insteadof|sI – A|).
Thedesignprocessthatfollowsgoesfromaunityfeedbacksystem(whichisidenticaltostatefeedbackwithK_1=1,K_2=0).Thatunityfeedbacksystemhasthefollowingcharacteristic polynomial:
Theeigenvalues oftheunityfeedbacksystemcanbeobtained fromthequadraticformulathenconvertedtopolarform:

Workoutthesecond-orderparameters:
Currentsettling time:
Sincewedon’tcareabout%OSlets justchangeωn.Tobringthedesiredsettling timedownto4secondswemodifyωn andthengetthedesiredpole locations:
=1.0246

Nowwecangetthedesiredcharacteristic polynomial:
Wecontinue todesigntheKgainvectorintheusualway.ThesystemisnotinCCFsoweuseBass-Gura andobtainK=[0.4450.113].

Thefollowingshowstheresulting improvement insystemresponse (x(0)=[10]T).








![Discrete-Time Sinusoids Periodicity Discrete-Time ...dkundur/course_info/signals/... · Discrete-Time Sinusoids Example 2: = 8ˇ=31 = ˇ 8 31 x[n] = cos 8ˇn 31 N = 2ˇk = 2ˇk ˇ8](https://img.pdfslide.us/doc/110x75/5e285cb8f5e11c2bed041033/discrete-time-sinusoids-periodicity-discrete-time-dkundurcourseinfosignals.jpg)