Embed Size (px)
Citation preview

8/10/2019 Devices Electronics
http://slidepdf.com/reader/full/devices-electronics 1/7
93
1.6 Configuring Intelligent Devices
J. BERGE (2003)
DESIGN FEATURE RECOMMENDATIONS
• Use permanently connected communications infra-structure.
• For the HART® Field Communications Protocol, use
a handheld with large, user-friendly screen.
• Use device configuration templates.
• Use a fieldbus tool that requires no proprietary filesfrom the host manufacturer.
• Be mindful of revisions when configuring fieldbus
devices.
COSTS
A HART handheld, such as Smar International’s HPC301,
costs approximately U.S. $1000.
A FOUNDATION™ fieldbus host, such as the SYSTEM302,
starts at U.S. $4000.
INTRODUCTION
Intelligent devices include “smart” instruments that have bothan analog 4- to 20-mA signal with simultaneous digital com-
munication, such as HART (Volume 3, Section 4.11), and field-
bus devices that are completely digital, such as FOUNDATION
fieldbus (Volume 3, Section 4.12). Intelligence in these devices,
along with networking and the right tools, can also be put to
good use to improve maintenance practices.
Both FOUNDATION fieldbus and HART protocols are specif-
ically designed for the configuration of field instruments andare therefore the most commonly used in the process industries.
They both have special parameters for the specific purpose of
device configuration, and both use the concept of device
description (DD) files to inform a host device how to commu-
nicate these parameters with the device. This is a unique char-acteristic of these protocols that makes them highly suitable for
instrumentation and control.
In the HART protocol, device parameter configuration is
based on commands for reading and writing. There are three
classes of commands: universal, common-practice, and spe-
cific. All HART devices support the universal commands, and
most also support several common-practice commands.
Together, the universal and common-practice commands cover
most functions needed in a device. This enables a host to per-
form most device functions without access to the DD. Essen-
tially, all devices also have a number of specific commands to
access unique functionality. Either a DD or a special driver is
required to communicate the special commands.
For FOUNDATION fieldbus device configuration parameters
are arranged in a resource block and in transducer blocks.There are also function blocks, but these are used for control
strategy building rather than device configuration. This distinc-
tion makes it easy to draw the line between device and strategy
configuration. The block parameters are accessed using sophis-
ticated communication services. A host needs to be loaded with
the DD to be able to communicate with a device. In addition,
to allow configuration of the device off-line, in advance, the
capabilities file (CF) is required.
Range setting is perhaps the most important setting of a
device based on a 4- to 20-mA signal such as used by a HART
instrument. Range sets the scale for the 4- to 20-mA signal.
Because FOUNDATION fieldbus devices communicate in floating-point mode and engineering units, there usually is no need to
set a range. Calibration shall not be confused with range set-
ting, since they are in fact different operations. For example,
for a transmitter range setting means configuring the measured
values at which the output shall be 4 and 20 mA, respectively.
Calibration, on the other hand, means adjusting the reading
from the sensor to match the correct value from a standard
(Section 1.8). Range setting does not correct the sensor read-
ing; it only affects the output scale.
To calibrate a transmitter, you must always apply a known
input. Therefore, calibration cannot be done remotely. The
expression remote calibration is often used erroneously tomean remote range setting. Some confusion exists in the mar-
ketplace as to what calibration is. This is a legacy from the
era of analog devices in which calibration and range setting
was done at the same time using the same set of potentiom-
eters. For the HART protocol, calibration is usually called
trim to distinguish it from range setting. FOUNDATION fieldbus
avoids this confusion by calling range setting scaling. Still
it is quite common in HART devices to change the range
instead of calibrating the device when the sensor reading is
wrong. The result is a correct 4- to 20-mA output, but any
digital reading in the display or host will be wrong, which
may lead to confusion.
© 2003 by Béla Lipták

8/10/2019 Devices Electronics
http://slidepdf.com/reader/full/devices-electronics 2/7
94 General Considerations
CONFIGURATION TOOLS
FOUNDATION fieldbus devices are permanently connected via
a network to a host in a convenient central location. HART
devices, on the other hand, normally operate only using 4 to
20 mA, and a hand-held HART communicator is connected
and communicates only when required. A FOUNDATION field-
bus host is therefore predominantly a stationary desktop com-
puter, whereas a HART communicator is usually a portable
device. However, portable interfaces for laptops exist for both
HART and FOUNDATION fieldbus operation.
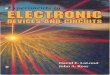
The handheld can be connected at any convenient point
along the 4- to 20-mA wire as long as it is on the instrument
side of the stipulated resistor (see Figure 1.6a). This connec-
tion is often done at the device itself, giving on-line access
to information, configuration, remote monitoring, calibration
and range setting, diagnostics, and maintenance.
The handheld can be either a dedicated text-based HART
device or a HART interface for an organizer with a graphicaluser interface (GUI). Rapid development in the area of per-
sonal organizers has brought about tools that incorporate
displays larger than three inches across and are capable of
sophisticated graphics with a Windows-like appearance. They
are also are very fast (see Figure 1.6b).
Fieldbus instruments are connected on the H1 field-level
nework that ties in with a linking device on the HSE host-
level network where the host computers with the configura-
tion tool is (Figure 1.6c). This is a permanent connection
where the network used for control, monitoring, and opera-
tion is also used for configuration and diagnostics, etc.
Linking device is typically one of many functions inte-
grated in a single device. Usually the same device is respon-
sible for powering the field instruments, etc. A linking device
typically has several H1 ports and can be connected in aredundant scheme for high availability (Figure 1.6d).
For FOUNDATION fieldbus interoperability with the host is
achieved through DD. By installing the device support files
for a device, the host computer has the information required
to communicate with the device and to allow the user to prepare
a configuration in advance, even without being connected to
the device. The files usually can be obtained from the man-
ufacturer’s site on the Internet. To guarantee interoperability,
an open host uses only standard files to support any device.
However, some tools may require proprietary files for each
device to work, in which case a short list of approved devices
applies.
FIG. 1.6a
HART handheld connection.
FIG. 1.6b
HART pocket Configurator. (Courtesy of Smar International.)
Resistor
+
−
Power
Supply Al Handheld
Terminal
FIG. 1.6c
F OUNDATION ™ fieldbus system architecture.
FIG. 1.6d
F OUNDATION ™ fieldbus linking device. (Courtesy of Smar Interna-
tional.)
H1 Fieldbus
Devices
Operation Engineering Maintenance Business
HSE Fieldbus
Router
H1 Fieldbus
Devices
© 2003 by Béla Lipták

8/10/2019 Devices Electronics
http://slidepdf.com/reader/full/devices-electronics 3/7
1.6 Configuring Intelligent Devices 95
DEVICE CONFIGURATION
HART devices are typically configured on line only, using ahandheld unit communicating directly with the device. How-
ever, some handhelds also support off-line configuration for
later download.
Although HART transmitters can operate in a purely
digital mode, the 4- to 20-mA output is almost always usedto deliver the process variable to the central controller. Setting
the range of the transmitter is therefore required. The primary
variable output settings are the most important part of the
configuration. The lower range value (LRV) is the measured
value at which the transmitter output will be 4 mA, and theupper range value (URV) is the input value at which the
output will be 20 mA; i.e., 0 and 100% of range, respectively.
Although LRV and URV are the proper terms, most call them
zero and span instead. But span is really the difference
between the URV and the LRV. The engineering unit can alsobe selected.
Range setting can be accomplished from the handheldby simply keying in the desired range values, regardless of
input. This can even be done remotely and stored as an off-
line configuration. Another method is to apply an input and
(by pressing a button on the handheld or on the transmitteritself) informing the device that the applied input is to be the
LRV or URV, thus setting the range (see Figure 1.6e). The
latter method is often used for pressure transmitters that are
installed with impulse lines that add hydrostatic pressure.
Pressing the button elevates or suppresses the zero, ensuringthat the output is 4 mA when appropriate. If the transmitter
has a noninteractive zero and span, the URV will be pushed
by the equivalent amount, leaving the span unaffected. Forexample, if the range of a pressure transmitter in a level
application starts off as 0 to 5.48 kPa, and applied rerange isdone with 1.86 kPa input, the new range becomes 1.86 to
7.34 kPa. However, when a rerange is applied for the URV,
this does not affect the zero; i.e., the span is changed instead.
The damping is a first-order lag filter time constant.
The transfer function is used to select linear or square rootextraction for differential-pressure flowmeters, and possibly
for other options such as a freely configurable lookup table or
square root of third or fifth power for open-channel flow
measurements. Square root extraction is often done in the
central control system, but it is in fact better to do it in the
transmitter, as this results in less A/D and D/A conversion error.
Fail-safe mode can be set as upscale or downscale as per
the NAMUR NE-43 standard. Downscale means that the
output current will be set to 3.6 mA in case the internal
diagnostics detect a fault. Upscale means the output will be
set to 21 mA. Ideally, the receiving controller should havean input module that can interpret the failure signal and use
this to shut down the control loop.
It is also possible to review the write protection status of
the device—if the device has been write protected using a
jumper or other solution.
When performing range setting or calibration, the user needs
to know the sensor limits and is therefore usually prompted with
this information, which typically can be reviewed at any time
(see Figure 1.6f). HART device information includes lower
range limit (LRL), upper range limit (URL), and the minimumspan. The minimum span is the smallest permitted absolute
difference between the URL and LRL for the sensor.Many configuration options are device specific in HART
devices. For example, for a temperature transmitter, the sen-
sor type and wiring has to be configured (see Figure 1.6g).For a valve positioner, the actuator type has to be configured.
In most FOUNDATION system installations, the device con-
figuration is created off-line for all devices in advance and
downloaded after installation. Moreover, the device configu-
ration is typically accomplished with the network and control
FIG. 1.6e
HART transmitter range setting.
FIG. 1.6f
HART transmitter sensor limits.
FIG. 1.6g
Sensor and wiring selection is device specific.
© 2003 by Béla Lipták

8/10/2019 Devices Electronics
http://slidepdf.com/reader/full/devices-electronics 4/7
96 General Considerations
strategy configuration, all in the same tool. Thus, when con-
figuring devices in a FOUNDATION system, the first step is to
create the devices on the networks and give the devices aphysical device tag (PD_TAG). Fieldbus devices are develop-
ing very rapidly. New versions are constantly being released,
and many users already have several versions around the plant
and in the store, this on top of a variety of brands of the same
kind of device. When inserting new devices, it is important tospecify the revisions to be used (see Figure 1.6h). Usually, the
latest revision is the default. There is a risk that you will
accidentally download a device configuration to the wrong
model or wrong version device. A good tool prevents this
and thus avoids the many headaches that could result.
Fieldbus devices do not require any range, because all
values are communicated as floating-point values in engi-
neering units. Ranges are typically used only in PID functionblocks, or possibly in AI function blocks, to cater for con-
versions in inferred measurements, such as converting differ-
ential pressure to flow within specified ranges. That is, scal-
ing is done as part of the control strategy configuration, notas part of the device configuration.
Every fieldbus device, H1 as well as HSE, needs to have
one resource block. Really, the only parameter that must be
configured is the mode. The MODE_BLK parameter target
shall be set to automatic.
A fieldbus transducer block is required, in conjunction
with every sensor and actuator, to act as an interface betweenthe device and the control strategy. By parameterizing the
transducer blocks, the device can be set up for the proper sensor
or actuator type, such as HART devices. Similarly the trans-
ducer block also contains information about sensor limits.
Indeed, there is a transducer scale range indication in thetransducer block, but it is essentially a reflection of a setting
done in the associated I/O function block. The MODE_BLK
parameter target shall be set to automatic.
IDENTIFICATION
Information for identifying the device is very helpful during
commissioning and maintenance. During the commissioning
stage, it is useful for further assurance that connection has
been made to the correct device. During maintenance, it is
helpful for retrieving serial numbers, special instructions,
important dates, and model numbers. The user can configure
some of these parameters to be pertinent to the application.
These parameters do not affect the operation of the device.
In addition to the sensor information such as range limits,HART device data such as sensor serial number, final assem-
bly number, message, device tag, descriptor, date, manufac-
turer, device type, software and hardware revisions, and cir-
cuit board serial number are provided. For HART devices,
the tag can use up to eight characters. The descriptor andmessage are 16 and 32 characters in length and can be con-
figured as annotations describing the application and remind
technicians of special precautions when servicing a device
(see Figure 1.6i).
The date has no specific purpose but may be used to store
when calibration or maintenance was last performed or is
scheduled. Manufacturer, model, and version information canalso be accessed (see Figure 1.6j).
HART devices such as pressure transmitters usually pro-
vide additional information about the materials of construction
for the parts wetted by the process, e.g., the sensor isolatingdiaphragm, O-ring, flange and remote seal parts, and so on.
The resource block found in any FOUNDATION fieldbus device
contains, among other things, identification information for the
device. The tag descriptor parameter may be used to describethe application of the device. Manufacturer, model, and version
information can also be accessed (see Figure 1.6k ).
FIG. 1.6h
Pay attention to revisions when creating device configurations.
FIG. 1.6i
Application information from a HART device.
FIG. 1.6j
Detail attributes of a HART device.
© 2003 by Béla Lipták

8/10/2019 Devices Electronics
http://slidepdf.com/reader/full/devices-electronics 5/7
1.6 Configuring Intelligent Devices 97
Fieldbus devices such as pressure transmitters usually pro-
vide additional information about the materials of construction
for the parts wetted by the process, e.g., the sensor isolating
diaphragm, O-ring, flange and remote seal parts, and so on
(see Figure 1.6l).
If any changes are ever made to the device parts, it is
important to update this information.
CALIBRATION
When the sensor reading differs from the actual applied input,
the sensor has to be calibrated. The correct reading is entered
from the maintenance tool, and the device then performs the
necessary adjustment. A special case of sensor calibration iszeroing, which by definition is done with a zero value applied.
This is accomplished, for example, by venting in the case of
a pressure transmitter; hence, no value has to be entered (see
Figure 1.6.m).
Nonzero calibration is usually done with a precision source
applied. Calibration is usually done in two points, known as
the low and high calibration points, respectively. For most
transmitters, calibration of these two points is noninteractive.
There is a limit to how close the two calibration points can be,
and the distance is referred to as the minimum span. Output
converters also need to be calibrated. This is usually done by
first forcing an output at one end of the scale and then
comparing the actual output against a standard. The actual
reading is entered into the device that makes the necessarycorrection. Control valve positioners usually calibrate their
position-sensing sensor themselves by automatically strokingthe valve over its entire travel.
Since HART devices rely on 4 to 20 mA, this current loop
can also be calibrated. However, it is rarely done because,being totally electronic, this part of the device rarely experi-
ences any drift at all. For a HART transmitter, this means that
a fixed output current is generated. The technician checks the
current against a standard and keys it into a device that makes
the necessary correction (see Figure 1.6n). For HART outputdevices, a signal is injected, and the device is informed of the
true current.Sensor or actuation calibration for FOUNDATION fieldbus
devices is done from the associated transducer block. The
standard transducer block also includes several parameters for
storing information about the last calibration. This includes
two parameters for keeping the values of the two calibration
points. This is useful when determining if a device has beencalibrated at points that are suitable for the operating range.
Additional information that can be stored includes calibration
date, location, the method used, and who performed the cali-
bration. It is good practice to update this information at each
calibration and to display it along with useful sensor limit
information (Figure 1.6o).
FIG. 1.6k
Fieldbus device identification from resource block.
FIG. 1.6l
Pressure transmitter materials of construction.
FIG. 1.6m
Zero calibration of HART transmitter.
FIG. 1.6n
Loop current calibration.
© 2003 by Béla Lipták

8/10/2019 Devices Electronics
http://slidepdf.com/reader/full/devices-electronics 6/7
98 General Considerations
MONITORING
Configuration tools for HART and FOUNDATION fieldbus sys-
tems are generally designed in different ways, not only in terms
of the way they look, but also the way they work. In HART
tools, menus are usually arranged according to the function
performed, whereas device configuration in fieldbus tools is
arranged according to the resource and transducer blocks. Thus,
in a HART device, there generally is a screen on which the
transmitter variables can be monitored on line (see Figure 1.6p).
SIMULATION
At the time of commissioning, it is common to check that
all indicators, recorders, and computer screens show the cor-
rect values, that alarm trips are working properly, and so on.
This is particularly important for HART devices, because
there is a chance that the range set in the device does not
match that set in the central controller, and any difference
would result in operational problems. To verify that all ranges
are consistent, it is helpful to use the simulation function
found in HART and fieldbus devices.
When performing simulation in a HART transmitter, the
output current is manipulated independently of the applied
input (see Figure 1.6q). Generally, the handheld allows the
current to be set slightly above and below the 4- to 20-mArange to simulate fault conditions.
Simulation is primarily used to test the control strategy.Therefore, simulation for FOUNDATION fieldbus devices is
done from the input and output function blocks.
DIAGNOSTICS
Many device diagnostics can be performed from a configu-ration tool, but only if communication is established. If there
is no functional communication, troubleshooting has to rely
on traditional means. When it comes to diagnostics, one of
the major differences in the application of HART and FOUN-
DATION fieldbus becomes most evident. While fieldbus devices
are constantly communicating, making it possible to monitordevice conditions continuously and instantly detect faults,
communication with HART devices is typically carried out
to confirm a problem only after the failure has already been
detected. Although applications with continuous HART com-munications do exist, they are rare. To fully benefit from
intelligence in field devices, the engineering tool should con-
tinuously communicate with the instruments.
Generic diagnostic information is communicated in every
exchanged HART message, giving the device the opportunity
to inform the user of any failure. Such error message includes
general malfunction, exceeded limits, and a message that
more detailed status report is available (see Figure 1.6r).
FIG. 1.6o
Calibration-related information.
FIG. 1.6p
Monitoring of dynamic transmitter variables from a HART tool.
FIG. 1.6q
Using loop test to simulate process variable from a handheld.
FIG. 1.6r
Basic HART diagnostics.
© 2003 by Béla Lipták

8/10/2019 Devices Electronics
http://slidepdf.com/reader/full/devices-electronics 7/7