Embed Size (px)
Citation preview

The Pennsylvania State University
The Graduate School
College of Engineering
DEVELOPMENT OF AN INNOVATIVE SPACER GRID MODEL
UTILIZING COMPUTATIONAL FLUID DYNAMICS WITHIN A
SUBCHANNEL ANALYSIS TOOL
A Thesis in
Nuclear Engineering
by
Maria Avramova
© 2007 Maria Avramova
Submitted in Partial Fulfillment of the Requirements
for the Degree of
Doctor of Philosophy
December 2007

The thesis of Maria Avramova was reviewed and approved* by the following:
Kostadin N. Ivanov Professor of Nuclear Engineering Thesis Advisor
Co-Chair of Committee
Lawrence E. Hochreiter Professor of Mechanical and Nuclear Engineering Co-Chair of Committee John H. Mahaffy
Associate Professor of Nuclear Engineering
Cengiz Camci Professor of Aerospace Engineering Markus Glueck AREVA, AREVA NP GmbH, Germany FDEET (Thermal Hydraulics) Special Member Jack Brenizer Professor of Mechanical and Nuclear Engineering
Chair of Nuclear Engineering Program
* Signatures are on file in the Graduate School
ii

ABSTRACT
In the past few decades the need for improved nuclear reactor safety analyses has led to
a rapid development of advanced methods for multidimensional thermal-hydraulic analyses.
These methods have become progressively more complex in order to account for the many
physical phenomena anticipated during steady state and transient Light Water Reactor (LWR)
conditions. The advanced thermal-hydraulic subchannel code COBRA-TF (Thurgood, M. J. et
al., 1983) is used worldwide for best-estimate evaluations of the nuclear reactor safety
margins. In the framework of a joint research project between the Pennsylvania State
University (PSU) and AREVA NP GmbH, the theoretical models and numerics of COBRA-TF
have been improved. Under the name F-COBRA-TF, the code has been subjected to an
extensive verification and validation program and has been applied to variety of LWR steady
state and transient simulations.
To enable F-COBRA-TF for industrial applications, including safety margins
evaluations and design analyses, the code spacer grid models were revised and substantially
improved. The state-of-the-art in the modeling of the spacer grid effects on the flow thermal-
hydraulic performance in rod bundles employs numerical experiments performed by
computational fluid dynamics (CFD) calculations. Because of the involved computational cost,
the CFD codes cannot be yet used for full bundle predictions, but their capabilities can be
utilized for development of more advanced and sophisticated models for subchannel-level
analyses. A subchannel code, equipped with improved physical models, can be then a powerful
tool for LWR safety and design evaluations.
The unique contributions of this PhD research are seen as development, implementation,
iii

and qualification of an innovative spacer grid model by utilizing CFD results within a
framework of a subchannel analysis code. Usually, the spacer grid models are mostly related
to modeling of the entrainment and deposition phenomena and the heat transfer augmentation
downstream of the spacers. Nowadays, the influence that spacers have on the lateral transfer of
momentum, mass, and energy within fuel rod bundles are not modeled. The goal of this study
is to address the missing phenomena in the current F-COBRA-TF spacer grid model and
namely the turbulent mixing enhancement due to spacers and the lateral flow patterns created
by specific configurations of the spacers’ structural elements.
iv

TABLE OF CONTENTS
LIST OF FIGURES .......................................................................................................................... ix
LIST OF TABLES........................................................................................................................... xii
NOMENCLATURE ....................................................................................................................... xiv
ACKNOWLEDGEMENTS.......................................................................................................... xviii
CHAPTER 1 Introduction ...................................................................................................................1
1.1 Spacer Grid – An Important Element of the Fuel Assembly Design..................................1
1.2 Challenges in the Spacer Grid Modeling in the Subchannel Codes ...................................2
1.3 Need of an Improved F-COBRA-TF Spacer Grid Model ..................................................3
1.4 New F-COBRA-TF Spacer Grid Model – Objectives and Theoretical Aspects ................4
1.5 Thesis Outline .....................................................................................................................8
CHAPTER 2 Review of the State-of-the-Art in the Spacer Grid Modeling .....................................10
2.1 Recent Trends ...................................................................................................................10
2.2 Experimental Studies on the Spacer Grid Effects.............................................................11
2.3 Numerical Studies on the Spacer Grid Effects .................................................................13
2.4 Subchannel-Based Modeling of the Spacer Grid Effects .................................................17
2.5 Concluding Remarks.........................................................................................................18
CHAPTER 3 Advanced Thermal-Hydraulic Subchannel Code COBRA-TF - Basic Models and Development .....................................................................................................................................19
3.1 Overview of the COBRA-TF Models and Features .........................................................19
3.2 Worldwide COBRA-TF Development and Applications .................................................30
3.2.1 COBRAG (General Electric Nuclear Energy, USA) ................................................... 31
3.2.2 WCOBRA/TRAC (Westinghouse Electric Company, USA) ...................................... 32
3.2.3 F-COBRA-TF (AREVA NP GmbH, Germany) .......................................................... 32
3.2.4 COBRA-TF (Korean Power Energy Company, Korea)............................................... 33
v

3.2.5 MARS (Korean Atomic Energy Research Institute, Korea) ........................................ 33
3.2.6 COBRA-TF (Japan Atomic Energy Research Institute, Japan) ................................... 34
3.2.7 COBRA-TF (University Polytechnic of Madrid, Spain).............................................. 34
3.2.8 COBRA-TF (Pennsylvania State University, USA) .................................................... 34
3.3 F- COBRA-TF Improvements Performed under the AREVA NP GmbH Sponsorship...35
3.3.1 F-COBRA-TF Coding Improvements.......................................................................... 36
3.3.2 F-COBRA-TF Numerical Methods Improvement ....................................................... 38
3.3.3 F-COBRA-TF Models Improvements – Turbulent Mixing and Void Drift ................ 49
3.3.4 F-COBRA-TF Validation and Verification Program................................................... 50
3.4 Concluding Remarks.........................................................................................................51
CHAPTER 4 F-COBRA-TF Spacer Grid Model ..............................................................................52
4.1 COBRA/TRAC Spacer Grid Model .................................................................................52
4.1.1 Pressure Losses on Spacers .......................................................................................... 52
4.1.2 De-Entrainment on Spacers.......................................................................................... 54
4.2 COBRA-TF_FLECHT SEASET Spacer Grid Model ......................................................55
4.2.1 Evaluation of the Spacer Loss Coefficients ................................................................. 55
4.2.2 Single-Phase Vapor Convective Enhancement ............................................................ 58
4.2.3 Grid Rewet Model ........................................................................................................ 58
4.2.4 Droplet Breakup Model................................................................................................ 66
4.3 Improvements of the COBRA-TF Spacer Grid Model Performed at PSU.......................68
4.3.1 Modeling of the Spacer Effects on Entrainment and Deposition................................. 68
4.3.2 Modeling of the Spacer Effects in Dispersed Flow Film Boiling Regime................... 71
4.4 Current F-COBRA-TF 1.03 Spacer Grid Model – Features and Drawbacks ...................73
4.5 Concluding Remarks.........................................................................................................74
CHAPTER 5 Modeling of Spacer Grid Effects on the Turbulent Mixing in Rod Bundles ..............75
5.1 Background.......................................................................................................................75
5.1.1 Turbulent Mixing Modeling in Subchannel Analysis Codes – Overview ................... 78
5.1.2 Turbulent Mixing Model of THERMIT-2.................................................................... 84
5.1.3 Turbulent Mixing Model of COBRA-TF..................................................................... 84
vi

5.1.4 Turbulent Mixing Model of MATRA .......................................................................... 85
5.1.5 Turbulent Mixing Model of FIDAS ............................................................................. 85
5.1.6 Turbulent Mixing Model of VIPRE-2.......................................................................... 85
5.1.7 Turbulent Mixing Model of NASCA ........................................................................... 86
5.1.8 Turbulent Mixing Model of MONA-3 ......................................................................... 87
5.2 F-COBRA-TF Turbulent Mixing Model ..........................................................................88
5.2.1 F-COBRA-TF Turbulent Mixing and Void Drift Models............................................ 89
5.2.2 Modifications to the F-COBRA-TF Turbulent Mixing and Void Drift Models Addressing the New Spacer Grid Modeling................................................................. 91
5.2.3 Modifications to F-COBRA-TF Turbulent Mixing and Void Drift Models Addressing Some Experimental Findings .................................................................... 93
5.3 Evaluation of the Single-Phase Mixing Coefficient by Means of CFD Calculations.......96
5.3.1 Methodology ................................................................................................................ 96
5.3.2 CFD Model................................................................................................................... 99
5.3.3 Evaluation of the Single-Phase Turbulent Mixing Coefficient .................................. 104
5.3.4 Incorporation of the CFD Results into F-COBRA-TF............................................... 111
5.3.5 Evaluations of the Spacer Grid Void Drift Multiplier................................................ 113
5.3.6 F-COBRA-TF Modeling of the Turbulent Mixing Enhancement by the ULTRAFLOWTM Spacers .......................................................................................... 114
5.4 Concluding Remarks.......................................................................................................129
CHAPTER 6 Modeling of Directed Crossflow Created by Spacer Grids.......................................130
6.1 Background.....................................................................................................................130
6.2 New F-COBRA-TF Model for the Directed Crossflow by Spacer Grids.......................132
6.2.1 F-COBRA-TF Transverse Momentum Equations ..................................................... 132
6.2.2 Calculation of the Transverse Momentum Change by Directed Crossflow............... 137
6.2.3 Verification of the Proposed Directed Crossflow Model ........................................... 141
6.2.4 Validation of the Proposed Directed Crossflow Model ............................................. 149
6.3 Concluding Remarks.......................................................................................................170
CHAPTER 7 Conclusions ...............................................................................................................171
vii
REFERENCES ...............................................................................................................................174
APPENDIX A: CFD Results for the 2×1 Case...............................................................................184
APPENDIX B: CFD Results for the ULTRAFLOW SpacerTM .....................................................191
APPENDIX C: CFD Data for the Mixing Coefficient Multiplier ..................................................194
APPENDIX D: Evaluation of the Transverse Momentum Change by Means of CFD Predictions of the Velocity Curl .....................................................................................................200
APPENDIX E: CFD Results for the FOCUS SpacerTM .................................................................202
APPENDIX F: CFD Data for the Lateral Convection Factor.........................................................207
viii

LIST OF FIGURES
Figure 1: COBRA-TF numerical solution flow-chart 43
Figure 2: F-COBRA-TF/SPARSKIT2 coupling scheme 44
Figure 3: Two-region grid quench and rewet model 59
Figure 4: Radiation heat flux network 60
Figure 5: Droplet breakup 66
Figure 6: Two-phase multiplier ΘTP as a function of quality x according to Beus (1970) 82
Figure 7: Definition of the gap size at the lateral distance in NASCA 87
Figure 8: Turbulent mixing two-phase multiplier as function of local void fraction 95
Figure 9: Void drift multiplier as function of local void fraction 95
Figure 10: Model for the evaluation of the single-phase mixing coefficient by the turbulent
viscosity 96
Figure 11: Model for evaluation of the single-phase mixing coefficient by the turbulent heat
flux across the gap 97
Figure 12: 2×1 CAD model for thermal-hydraulic analysis of heat transfer by turbulent
diffusion 102
Figure 13: Side and top views of the mixing vanes configuration 102
Figure 14: Mesh grid of the 2×1 model 103
Figure 15: Geometrical characteristics of the mixing vanes in the 2×1 model 103
Figure 16: The non-dimensional eddy thermal diffusivity calculated by Ikeno (Ikeno,T., 2001) 107
Figure 17: Evaluation of the single-phase mixing coefficient using surface-averaged turbulent
viscosity and vertical velocity – dependence on the strap thickness 108
Figure 18: Evaluation of the single-phase mixing coefficient using gap-averaged turbulent
viscosity and vertical velocity – dependence on the strap thickness 108
Figure 19: Evaluation of the single-phase mixing coefficient using surface-averaged turbulent
viscosity and vertical velocity – dependence on the declination angle (strap
thickness of 0.4 mm) 109
Figure 20: Evaluation of the single-phase mixing coefficient using gap-averaged turbulent
viscosity and vertical velocity – dependence on the declination angle (strap
thickness of 0.4 mm) 109
ix

Figure 21: Evaluation of the single-phase mixing coefficient by local heat balance over the
gap – dependence on the strip thickness 110
Figure 22: Evaluation of the single-phase mixing coefficient by local heat balance over the
gap – dependence on the declination angle (strap thickness of 0.4 mm) 110
Figure 23: Schematic of the spacer multiplier distribution over the axial length 111
Figure 24: 3D view of the ULTRAFLOWTM spacer 114
Figure 25: Mixing vanes configuration of the ULTRAFLOWTM spacer design 115
Figure 26: Schematic of the CFD model for the ULTRAFLOWTM spacer 115
Figure 27: CFD results for the single-phase mixing coefficient for ATRIUMTM10 XP bundle
with ULTRAFLOWTM spacers 117
Figure 28: CFD results for the single-phase mixing coefficient for the ATRIUM 10 XP
bundle without spacers
TM
118
Figure 29: CFD results for the spacer grid mixing multiplier for the ULTRAFLOW designTM 118
Figure 30: Axial positions of the ULTRAFLOWTM mixing spacers along the heated length of
the ATRIUMTM 10 XP bundle 121
Figure 31: Axial distribution of the spacer multiplier along the heated length of the
ATRIUMTM 10 XP bundle 121
Figure 32: Layout of the F-COBRA-TF model of the ATRIUMTM 10 XP bundle 122
Figure 33: Mixing coefficient determined by the standard and the new F-COBRA-TF models 122
Figure 34: Liquid crossflow by turbulent mixing, ULTRAFLOWTM spacer 123
Figure 35: Vapor crossflow by turbulent mixing, ULTRAFLOWTM spacer 123
Figure 36: Void fraction in the hotter subchannel, ULTRAFLOWTM spacer 124
Figure 37: Void fraction in the colder subchannel, ULTRAFLOWTM spacer 124
Figure 38: Flow quality in the hotter subchannel, ULTRAFLOWTM spacer 125
Figure 39: Flow quality in the colder subchannel, ULTRAFLOWTM spacer 125
Figure 40: Enthalpy distribution in the hotter subchannel, ULTRAFLOWTM spacer 126
Figure 41: Enthalpy distribution in the colder subchannel, ULTRAFLOWTM spacer 126
Figure 42: Components of the total crossflow 127
Figure 43: Comparison of the code temporal convergence 127
Figure 44: Comparison of the code convergence on mass balance 128
Figure 45: Comparison of the code convergence on heat balance 128
x

Figure 46: Schematic of the HTPTM Spacer 131
Figure 47: Schematic of the FOCUSTM Spacer 131
Figure 48: F-COBRA-TF transverse momentum mesh cell 133
Figure 49: Schematic of two intra-connected fluid volumes 139
Figure 50: Mixing vanes configuration in the 2×2 FOCUSTM model 142
Figure 51: 3D views of the FOCUSTM spacer 142
Figure 52: CFD predictions for the lateral velocity for different mixing vane angles 145
Figure 53: CFD predictions for the lateral mass flux for different mixing vane angles 145
Figure 54: Lateral convection factor for different mixing vane angles 146
Figure 55: Schematic of the spacers positions in the 5x5 bundle with FOCUSTM spacer 146
Figure 56: F-COBRA-TF predictions for the lateral velocity for different mixing vane angles 148
Figure 57: F-COBRA-TF predictions for the lateral mass flux for different mixing vane angles 148
Figure 58: Schematic of the F-COBRA-TF 5×5 model of DTS53 mixing test bundle 153
Figure 59: Mixing vanes arrangement and meandering flow patterns in the 5x5 bundle with
FOCUSTM spacer 153
Figure 60: Comparison of the code temporal convergence when modeling directed crossflow 168
Figure 61: Comparison of the code convergence on mass balance when modeling directed
crossflow 168
Figure 62: Comparison of the code convergence on heat balance, directed crossflow modeling 169
Figure C-1: Flow chart of the modeling of the enhanced turbulent mixing due to mixing vanes 199
Figure D-1: Schematic of the model for evaluation of the lateral momentum change by
velocity curl 200
Figure E-1: Axial distribution of the lateral (UW) velocity for FOCUSTM spacer with mixing vanes of 10° 205
Figure E-2: Axial distribution of the lateral (UW) velocity for FOCUSTM spacer with mixing vanes of 20° 205
Figure E-3: Axial distribution of the lateral (UW) velocity for FOCUSTM spacer with mixing vanes of 30° 206
Figure E-4: Axial distribution of the lateral (UW) velocity for FOCUSTM spacer with mixing vanes of 40° 206
Figure F-1: Flow chart of the modeling of the directed crossflow 212
xi

LIST OF TABLES
Table 1: Comparison of the F-COBRA-TF equations to the Reynolds-averaged Navier-
Stokes equations........................................................................................................... 7
Table 2: F-COBRA-TF efficiency with different pressure matrix solvers ................................. 48
Table 3: Summary of the published correlations for single-phase mixing coefficient ............... 82
Table 4: Single-phase mixing coefficient as calculated with different correlations................... 83
Table 5: Suggested values for the max .................................................................................... 83 Θ
Table 6: Description of the 2x1 channels model used in the STAR-CD calculations.............. 101
Table 7: Description of the 2x2 channels model used in the STAR-CD calculations.............. 143
Table 8: Geometrical characteristics of test section DTS53..................................................... 150
Table 9: Range of conditions for test section DTS53............................................................... 150
Table 10: Tests operational conditions ...................................................................................... 150
Table 11: Geometrical characteristics of the F-COBRA-TF model .......................................... 152
Table 12: Statistical analyses for data set 1: all subchannels. Mean value and standard
deviation of absolute temperature differences ......................................................... 159
Table 13: Statistical analyses for data set 2: peripheral subchannels only. Mean value and
standard deviation of absolute temperature differences........................................... 160
Table 14: Statistical analyses for data set 3: internal subchannels. Mean value and standard
deviation of absolute temperature differences ......................................................... 161
Table 15: Statistical analyses for data set 4: central subchannels only. Mean value and
standard deviation of absolute temperature differences........................................... 162
Table 16: Statistical analyses for data set 1: all subchannels. Mean value and standard
deviation of relative temperature differences .......................................................... 163
Table 17: Statistical analyses for data set 1: peripheral subchannels only. Mean value and
standard deviation of relative temperature differences............................................ 164
Table 18: Statistical analyses for data set 1: internal subchannels. Mean value and standard
deviation of relative temperature differences .......................................................... 165
Table 19: Statistical analyses for data set 1: central subchannels only. Mean value and
xii

standard deviation of relative temperature differences............................................ 166
tatistical analyses: Temperature differences for each subchannel i averaged over Table 20: S
4
Table A-2:
193
Table C-1:
. 204
Table F-1:
able F-2: Example for the CFD data set for the FOCUSTM spacer ......................................... 208
the calculated test points .......................................................................................... 167
Table A-1: Temperature field distribution at different strip thickness ..................................... 18
Turbulent viscosity, vertical velocity, and temperature field distribution at the gap
region at different strip thickness ........................................................................... 185
Table A-3: Vertical velocity distribution at different strip thickness ........................................ 186
Table A-4: Turbulent viscosity distribution at different strip thickness .................................... 187
Table A-5: Temperature field distribution at different vane angles .......................................... 188
Table A-6: Turbulent viscosity distribution at different vane angles ........................................ 189
Table A-7: Pressure field distribution at different vane angles ................................................. 190
Table A-8: Turbulent Viscosity Distribution over the Subchannels Centroids Line................. 190
Table B-1: Flow pattern at different altitudes (UV velocity component, m/s) ......................... 191
Table B-2: Temperature distribution at different altitudes (in Kelvin....................................... 192
Table B-3: Turbulent viscosity at different altitudes (in Pa-s....................................................
Description of the format of the additional input deck with the CFD data for the
mixing multiplier ..................................................................................................... 194
Table C-2: Example for the CFD data set for the 2×1 case ....................................................... 195
Table C-3: Example for the CFD data set for ULTRAFLOWTM spacer ................................... 197
Table E-1: Lateral (UW) velocities field immediately downstream of the mixing vanes ......... 202
Table E-2: Lateral velocity field further downstream of the spacer ......................................... 203
Table E-3: Lateral velocities field at the position of ‘velocity inversion’ ...............................
Description of the format of the additional input deck with the CFD data for the
lateral convection factor........................................................................................... 207
T
xiii

NOMENCLATURE
A Flow area
D Channel hydraulic diameter
dx Axial mesh node size
g Gravitational acceleration
G Mass flux −
G Bundle average mass flux
h Enthalpy
l Mixing length
P Pressure
q Interfacial heat transfer i
q Fluid-fluid conduction heat flux
tq '' Heat flux due to mixing effects
t Energy exchange rate due to mQ ixing effects ’’’
i and j ’’’ f entrainment per unit volume
y
e interval
T
Q Wall heat flux
Re Reynolds Number
Sij Gap length between the adjacent channels
S Net rate o
U Velocit
t Time
∆t Averaging tim
Temperature
T Reynolds stress tensor
esh cell
ss-flow
Absolute value
S Gap width
∆x Vertical dimension of m
W’ Fluctuating Cro
-
xiv

Greek
α Phasic volume fraction
by interfacial transfer or chemical reaction
cosity
ρ Phasic density
θ
the peak-to –single phase mixing rate
Quality
β Mixing coefficient
Г’’’ Rate of mass gain
ε Eddy diffusivity
µ Dynamic viscosity
ν Kinematical vis
''' Shear stress τ
'''Iτ Interfacial grad
Two-phase multiplier
θM Value of
χ
Subscripts
calc Calculated
conv Convective
e, ent Entrainment field
ev, ent-vap Between entrainment and vapor
ped
e gases
x
ield
quid and vapor
exp Experimental
EQ Equilibrium
FD Fully develo
hyd Hydrauliq
g Non condensabl
i Channel index
j Channel inde
k Phase index
l, liq Liquid f
lat Lateral
lv, liq-vap Between li
xv

max Maximum
r grid
e
field
Wall
ween wall and liquid
min Minimum
mix Mixture
mom Momentum
rad Radiation
sat Saturation
SG Space
SP Single-phas
tot Total
TP Two-phase
turb Turbulent
v, vap Vapor
vg Vapor-gas mixture
w
wall-liq Bet
Superscripts
abs Absolute
tational Fluid Dynamics
l
ixing
TM Trademark
VD Void Drift
CFD Compu
in Inlet
out Outlet
rel Relative
SCH Subchanne
surf Surface
T Turbulent
TM Turbulent M
xvi

Acronyms
BOHL Beginning of the Heated Length
BWR Boiling Water Reactor
id Dynamics
wo Fluids
iling
ucleate Boiling Ratio
ngth
ctor
ucleate Boiling Ratio
Break
PWR Pressurized Water Reactor
RHS Right Hand Side
CFD Computational Fluid Dynamics
CHF Critical Heat Flux
CMFD Computational Multi-phase Flu
COBRA-TF Coolant Boiling in Rod Arrays – T
DFFB Dispersed Flow Film Boiling
DNB Departure from Nucleate Bo
DNBR Departure from N
EOHL End of the Heated Le
FA Fuel Assembly
LWR Light Water Rea
LOCA Loss Of Coolant Accident
LHS Left Hand Side
MDNBR Minimum Departure from N
MSLB Main Steam Line
xvii

ACKNOWLEDGEMENTS
I would like to thank my advisor, Prof. Kostadin Ivanov, for his continuous support and
guidance throughout the course of this study. I am also very grateful to Prof. Lawrence
Hochreiter for his technical help and advice, which were very important for accomplishment of
the objectives of this research.
I would like to express my sincere appreciation to AREVA NP GmbH (former
Siemens/KWU) for funding of my research and making their resources available.
Further, I would like to thank to the committee members Prof. John Mahaffy, Prof. Cengiz
Camci, and Dr. Markus Glueck for reading and making additional suggestions to improve this
thesis.
I extend my thanks to my friends and colleagues from Reactor Dynamics and Fuel
Management Group, Disparagement of Mechanical and Nuclear Engineering, Penn State
University for creating of a multicultural and friendly atmosphere of cooperation and patience
during my study at Penn State.
I would like to thank my family for their continuous love and understanding.
Finally, I would like to express my special gratitude to Rudi Reinders for his lessons to
think positively and to believe in myself.
xviii

CHAPTER 1
INTRODUCTION
1.1 Spacer Grid – An Important Element of the Fuel Assembly Design
Originally designed to maintain proper geometrical configurations of the fuel rod bundles,
spacer grids have a significant influence on the fluid dynamics and the heat transfer in LWR fuel
assemblies (FA). The spacers act as flow obstructions in the bundles and therefore increase the
overall pressure losses due to form drag and skin friction. On another side, spacer grids change the
flow area by contracting the flow and then expanding it downstream of each grid, thereby
disrupting and re-establishing the fluid and thermal boundary layers on the fuel rod, which
increases the local heat transfer within and downstream of the spacer. In BWR rod bundles they
also lead to a local liquid film thickening due to droplets collection and run-off effect and local
upstream dry patches due to “horseshoe” effect. Spacers are in a direct contact with the liquid film
on the rod surfaces causing an increase of the entrainment rate. Spacer grids may have special
geometrical features to promote turbulence, the effect of which may propagate further downstream.
The coolant mixing within a subchannel and between the subchannels can be significantly enhanced
by the mixing vanes, which work as mixing promoters and/or flow deflectors and have a very
specific impact on the flow distribution. Some vane configurations may create a strong lateral flow
and thus enhance the mass, heat and momentum exchange between neighboring subchannels. For
example, the split vanes, which are integrally formed on the upper edges of the interlaced strips of a
grid and bent over in the flow channel, deflect the upward flow to mix between neighboring
subchannels or to swirl within the subchannel. The swirl vanes are intended to generate a strong
swirling flow in the subchannel. They are designed to provide a fuel spacer with swirl blades each
capable to generate a strong swirl. If the grid has four swirl deflectors attached at the upper ends of
1

the interconnections between the straps, the design will result in a small blockage area and thereby
will minimize the pressure losses. The twisted vanes have a two mixing vanes at the upper ends of
the interconnections between straps, which are bent in opposite directions at the top slope of the
triangular base. This is a modified design of the swirl vanes, which generates a crossflow between
subchannels as well as swirling flow in the subchannel by directing flow simultaneously to the fuel
rod and to the gap region.
In general, spacer grids have a beneficial effect on the critical heat flux/critical power in the
LWR fuel assemblies. The hydrodynamic behavior of the spacers depends on their geometrical
characteristics as well as on the local flow conditions as pressure, local mass velocity and quality
and has to be taken into consideration in the core thermal-hydraulic calculations.
1.2 Challenges in the Spacer Grid Modeling in the Subchannel Codes
When modeling the thermodynamic phenomena in a real rod bundle, one should take into
account the existence of spacer grids and their mixing promoters and flow deflectors. The classical
subchannel analyses codes, which are currently used for routine evaluations of the local thermal-
hydraulic safety margins and design studies in LWRs, are not yet capable of accurate and complete
modeling of the spacer effects. Their models are primary based on empirical correlations and are
usually limited to simulations of the pressure losses, the entrainment and deposition, and the
downstream heat transfer augmentation. The subchannel analyses codes are capable of predicting
the “bulk” flow re-distribution inside rod bundles, but they are not able to simulate local flows
caused by mixing vanes. The lateral exchange of momentum, mass, and energy due the re-direction
of flow through the rod-to-rod gap regions by the mixing vanes and the enhancement in the
turbulent diffusion are partially or not modeled.
2

Because of the specifics in each new spacer design, it is impossible to perform accurate studies
for the fuel assembly performance without involving costly thermal-hydraulic experiments; bur
with its newest developments, the computational fluid dynamics (CFD) has the potential to
significantly reduce the need for such expensive experiments and to expedite the improvement
process. Recent development in computer technology makes us to believe that both, experiments
and subchannel analyses could be replaced by CFD and computational multi-phase fluid dynamics
(CMFD). But to be realistic, we have to recognize that the CFD/CMFD capabilities are not yet
sufficiently advanced to simulate the complex nature of two-phase phenomena in a boiling flow.
We have to recognize as well that even the newest massive parallel computers are not powerful
enough to allow full bundle CFD calculations for routine applications. In this situation, the
subchannel analyses remain the most practical and reasonable option. Nowadays, the experiments
are still indispensable and the CFD calculations would be used as a supporting tool on behalf of
subchannel analyses.
1.3 Need of an Improved F-COBRA-TF Spacer Grid Model
In 1999 the Pennsylvania State University (PSU) public version of the COBRA-TF code
(COBRA-TF_FLECHT SEASET by Paik, C.Y. et al., 1985) was transferred to AREVA NP GmbH
(former Siemens KWU) and further improved in a framework of a joint research project between
PSU and AREVA NP GmbH. Later, under the name F-COBRA-TF, the code was adopted as an in-
house AREVA NP GmbH subchannel code for reactor core thermal-hydraulic design analyses.
The spacer grid model of F-COBRA-TF, code version 1.03, is identical to the COBRA-
TF_FLECHT SEASET code version. The model will be described in detail in Chapter 4. Briefly, F-
COBRA-TF 1.03 includes models for:
3

Local pressure losses in a vertical flow due to spacer grids;
De-entrainment on the spacers grid;
Single-phase vapor convective enhancement downstream of the spacers grids;
Grid rewet under dispersed flow conditions;
Droplet breakup model.
F-COBRA-TF 1.03 is not equipped with adequate models for
Spacers’ effects on the mass, heat, and momentum exchange mechanisms such as
turbulent mixing and void drift;
Lateral flow patterns created by specific configurations of the vanes (directed
crossflow);
Swirl flow created by the mixing vanes.
In order to enable the F-COBRA-TF code for industrial applications including LWR safety
margins evaluations and design analyses, the code modeling capabilities related to the spacer grid
effects were revised and substantially improved.
1.4 New F-COBRA-TF Spacer Grid Model – Objectives and Theoretical Aspects
The objectives of this PhD research were formulated as development, implementation, and
qualification of an innovative spacer grid model utilizing CFD results within the framework of an
efficient subchannel analysis tool.
The F-COBRA-TF 1.03 code was used as a test bed for implementation of the new advanced
spacer grid modeling capabilities. The goal was to improve the F-COBRA-TF such that it can be a
suitable tool for LWR fuel assembly design and analyses. To accomplish this objective several new
and improved analytical models, which represent the “missing“ physics in the current version of F-
4

COBRA-TF, needed to be developed.
Thermal-hydraulic phenomena addressed in the new F-COBRA-TF spacer grid model consists
of an enhancement of the turbulent mixing between the subchannels downstream of spacer and a
directed crossflow due to flow deflection on the spacer. The spacer effect on the entrainment and
deposition were not a part of this PhD thesis.
The spacer grid enhances the lateral turbulent transport between subchannels due to increased
turbulence level in the flow. Therefore, the turbulent transport needs to be increased locally within
the basic code framework where the spacer grid exists.
The directed crossflow is a flow pattern caused by the sweeping effects of the mixing vanes or
other grid structures. The magnitude of the directed crossflow depends of the spacer geometry.
Each phenomena of interest was accounted for into the code conservation equations by an
additional source term. In other words, the new model is a “construction kit” system, separating the
effects of different phenomena.
Additional points of interest were the stability analysis of the explicit time discretization
scheme with respect to new source terms and the possible increase of CPU time due to new model
or finer spatial discretization.
The new models were developed and calibrated using detailed CFD calculations performed at
AREVA NP GmbH with the STAR-CD code, version 3.26. Comparisons to experimental data
were performed for each phenomenon.
The theoretical aspects of implementing additional terms, due to spacer grid, in the F-COBRA-
TF transport equations were studied and clarified. The existing F-COBRA-TF conservation
equations were compared to the full Reynolds-averaged Navier-Stokes equations. The “missing”
5

physics and the phenomena directly influenced by the spacers were identified. Decision was taken
which of them to be modeled in F-COBRA-TF. It can be seen from Table 1 that F-COBRA-TF, as
a thermal-hydraulic code developed on a subchannel basis, does not account for: 1) the lateral
exchange between subchannels due to molecular and turbulent diffusion in swirling flow in a
horizontal plane; 2) the lateral exchange between subchannels due to centrifugal force in swirling
flow in a horizontal plane; 3) the transverse flow between subchannels due to flow patterns created
by different deflectors; 4) the lift force; 5) the turbulent dispersion force; 6) the virtual mass force;
and 7) the wall lubrication force. Although all these local-scale processes are influenced by the
spacers, the effect on the first three is significantly strong and cannot be considered negligible.
To address the implementation and validation aspects of the new model, the different spacer
grid phenomena were classified into three groups. The first group includes those models that can be
accommodated within current code framework, such as pressure losses in axial and lateral flow
directions and the transverse mass exchange between neighboring subchannels caused by spacer
loss coefficients. The second group includes those models that require (need) new experimental
data as a basis for new improved correlations within current code framework. These are the
turbulent mixing downstream of spacers (particularly two-phase mixing); the spacer vanes induced
swirl within a subchannel; and the spacers’ effect on the void drift phenomenon. The third group
includes those models that can be developed using results of detailed CFD calculations. Such
phenomena are the swirl within a subchannel; the directed crossflow due to specific vane design;
turbulent mixing between subchannels; and the effect of spacers on the void drift.
A detailed discussion of the new F-COBRA-TF spacer grid modeling capabilities is given in
Chapters 5 and 6. The aspects of the incorporation of CFD results into a subchannel code are
presented and the selection of the experimental data for model validation is discussed.
6

Table 1: Comparison of the F-COBRA-TF equations to the Reynolds-averaged Navier-Stokes equations
Terms Affected by the Spacers RANS Equations F-COBRA-TF
F-COBRA-TF Comments
1. Gravity force modeled no n/a n/a
2. Transverse flow between subchannels due to lateral pressure gradients (diversion crossflow)
modeled yes not modeled
Can be modeled following the current code logic for the horizontal pressure loss coefficient for a gap by adding the contribution of the spacers. The horizontal spacer loss coefficient may be determined from experimental data or CFD calculations.
3. Pressure Losses frictional losses head losses interfacial drag
forces
modeled modeled modeled
yes
modeled as head losses in axial direction due to spacers
Needs further validation: measure data for the pressure drop with and without spacers are needed.
4. Lateral exchange between subchannels due to molecular and turbulent diffusion in axial flow (turbulent mixing)
modeled yes
5. Void drift modeled yes
not modeled
The turbulent mixing and the void drift have to be modeled in the momentum equations as separate terms. Thus the spacers’ influence on both phenomena can be modeled and validated independently. An additional multiplier, accounting for the enhanced turbulent mixing due to spacers, can be applied to the turbulent mixing coefficient following the currently existing logic. Its value can be obtained with CFD calculations.
6. Lateral exchange between subchannels due to molecular and turbulent diffusion in swirl flow in a horizontal plane (turbulent mixing in the transverse momentum equation)
not modeled yes not modeled Can be modeled as an additional term to the transverse momentum equation based on CFD calculations.
7. Lateral exchange between subchannels due to centrifugal forces in swirl flow in a horizontal plane
not modeled yes not modeled Can be modeled as an additional term to the transverse momentum equation based on CFD calculations.
7

Terms Affected by the Spacers RANS Equations F-COBRA-TF
F-COBRA-TF Comments
8. Transverse flow between subchannels due to other flow patterns created by spacers/spacer vanes (directed flow)
not modeled yes not modeled Can be modeled as an additional term to the transverse momentum equation based on CFD calculations.
9. Lift force (Magnus effect on bubbles and droplets; relative velocity and rotation in velocity field of continuous phase)
not modeled yes n/a n/a
10. Turbulent dispersion force (Diffusive bubble movement due to turbulence in the continuous phase)
not modeled yes not modeled Can be modeled as an additional term to the transverse momentum equation based on CFD calculations.
11. Virtual mass force not modeled yes n/a n/a
12. Wall lubrication force not modeled yes n/a n/a 13. Entrainment of
droplets in annular flow
modeled yes
modeled; currently under improvement
14. Deposition of droplets in annular flow
modeled yes
modeled; currently under improvement
Current models are mostly based on experimental data. CFD calculations are also valuable if provided by advanced two-phase capabilities.
1.5 Thesis Outline
Chapter 2 of the thesis discusses the state-of-the-art in the modeling of spacer grid effects on the
flow distribution within rod bundles.
Chapter 3 presents the basic models and features of the advanced thermal-hydraulic subchannel
code COBRA-TF. In addition, the worldwide COBRA-TF development and applications are
summarized. Special attention is given to the F-COBRA-TF code and its numerics and models
improvements performed within the framework of the cooperation between the PSU and AREVA
8

NP GmbH, Germany.
Chapter 4 provides a comprehensive review of the current F-COBRA-TF 1.03 spacer grid
model, which is based on the COBRA-TF_FLECHT SEASET spacer grid model.
Chapter 5 focuses on the effects of spacer grids on the turbulent mixing phenomenon. The F-
COBRA-TF models and their modifications are discussed in details. Methodologies for and results
of evaluations of single-phase mixing coefficient by means of CFD calculations are given. The
incorporation of the CFD results into F-COBRA-TF is presented and comparative analyses for the
ATRIUMTM10 BWR rod bundle are given.
Chapter 6 described the modeling of the directed crossflow created by the mixing vanes. The
validation of the model against the AREVA NP GmbH 5x5 mixing tests is presented.
Chapter 7 summarizes the contribution of this PhD thesis and outlines the further
improvements that need to be performed.
9

CHAPTER 2
REVIEW OF THE STATE-OF-THE-ART IN THE SPACER GRID MODELING
2.1 Recent Trends
A comprehensive review of the open literature indicated that the efforts in understanding the
spacer grid impact on the core thermal-hydraulics involves performing experimental mockup tests,
numerical simulations, and developing of reliable empirical or semi-empirical models. Recently, the
following approach is being adopted. First, a given CFD code is being validated against
experimental data. Once validated, the features of the computational fluid dynamics are utilized for
prediction of the flow thermal-hydraulic behavior for a particular spacer design. The CFD results
are then used to improve the spacer grid models implemented into a subchannel code. An example
is the work performed at Mitsubishi Heavy Industries, Ltd., Japan. Single-phase flow tests have
been carried out in a system of two or four assemblies of 5x5 and 4x4 rod bundle with staggered
grids (Ikeda, K. et al., 1998). Crossflow around the grid has been measured with laser Doppler
velocimeter. The effect of different grid type has been examined – grid without vanes, grid with
guide vanes, grid with mixing vanes, and grid with guide tabs. CFD analytical method has been
developed to model the test section area using a porous medium for the grid resistance. CFD
predictions have been found to be in good agreement with measurements. Thus, in order to improve
the performance of the subchannel code MIDAS (Akiyama, Y., 1995) the assembly wise analysis
and computational fluid dynamics have been combined to evaluate crossflow velocity in the bundle
(Hoshi, M. et al., 1998).
Such methodology could be used for whole LWR core evaluations with relatively short CPU
times and reasonable computer resources.
10

2.2 Experimental Studies on the Spacer Grid Effects
There is a wide range of published experimental studies that investigate the spacer grid effects
on the thermal-hydraulic performance of rod bundles. The major phenomena examined are the
additional pressure drop in the axial flow; the natural mixing between adjacent subchannels
resulting from lateral pressure gradients; the specific flow patterns, axial and lateral, created by
mixing vanes; and the heat transfer augmentation near spacers due to enhanced turbulence.
The experimental data on the flow mixing between subchannels of bare rod bundles collected
by Rowe et al., (Rowe, D. S. et al., 1974), Möller (Möller, S. V., 1991), and Rehme (Rehme, K.,
1992) showed that the inter-subchannel mixing, resulting from lateral pressure differences, is
mostly due to periodical flow pulsations between the subchannels.
However, the presence of a spacer grid equipped with mixing devices leads to a forced mixing
either within a subchannel or between the subchannels. An investigation of the crossflow mixing in
a rod bundle caused by a spacer grid with ripped-open blades has been performed at Xi’an Jiaotong
University, China (Shen, Y. F. et al., 1991). Using a laser-Doppler velocimeter measurements of the
flow transverse mean and the RMS velocities have been carried out in a sixteen-rod bundle with
spacers grids with ripped-open blades. The mixing rate was found to be strongly dependent on the
declination angle of the blades: the larger is the angle, the larger is the mixing rate and more rapidly
the mixing intensity decreases. Also, at larger blade angles the mixing rate distribution inside the
subchannel was characterized with a larger non-uniformity. A cylindrical vortex flow was observed
as well. The vortices were rotating in the direction of the vanes. Phenomenon defined by Shen as a
“velocity inversion” was reported. Downstream of the spacer, the velocity distributions at the gap
regions were not symmetrical: at one rod surface the velocity was higher than at another; and as a
11

result an inversion of the lateral velocity occurred.
Using particle image velocimetry, measurements of the axial development of a swirl flow have
been carried out at the Clemson University 5×5 rod bundle test facility (McClusky, H. L. et al.,
2002). Swirl flow has been introduced in a subchannel by attaching split vanes at the downstream
edge of a support grid. Lateral flow fields and axial vorticity fields over a range of 4.2 to 25.5
hydraulic diameters downstream of the grid were examined for a Reynolds number of 2.8×104. The
axial vorticity fields showed that the swirl flow generated by the split vanes is qualitatively
consistent with the definition of a classical vortex. As the flow developed in the axial direction, the
swirling flow migrated away from the center of the subchannel. The lateral velocity was measured
in a radial direction from the centroid of vorticity at different axial locations. Results showed that
the lateral velocity increased to a maximum and then decreased. Circulation profiles were found to
increase from the vorticity centroid to the edge of the region and their magnitude decayed with the
axial length.
The aforementioned Clemson University test facility has been used by Conner et al. (Conner,
M. E. et al., 2004) to measure the lateral flow field downstream of a grid with mixing vanes for four
unique subchannels. In an agreement with McClusky et al. (McClusky, H. L. et al. 2002), the
experiment showed that the mixing vanes produce vortices that persist far downstream of the grid.
Two vortices were observed in the subchannel central region. The direction of the swirl changed
among the subchannels as driven by the vane orientation. Downstream of the grid the vortices
tended to get slightly closer together and toward to one of the rod surfaces. In addition, small vane
knee vortices were found near gap regions. They were local effects and did not last. Also, the
presence of stagnation points (low flow due to flow moving away from rod surface), impingement
points (flow directed into rod surface), and a swirl in the lateral flow indicated that the rod surface
12

sees significantly different flow conditions, both in axial and lateral domains and thus, the heat
transfer around the rod has variability.
Yao et al., (Yao, S. C. et al., 1982) have proposed an empirically derived model for a heat
transfer augmentation for straight and swirling spacer grids in single-phase and post CHF dispersed
flow.
Experimental data for the pressure drop and rod surface temperature has been collected at the
PSU rod bundle heat transfer test facility. The spacer grid is a 7×7 mixing vane grid representative
of an actual PWR grid (Campbell, R. L. et al., 2005).
Detailed pressure measurements over a spacer grid in low adiabatic single- and two-phase
bubbly flows have been carried out in an asymmetric 24-rod sub-bundle, representing a quarter of a
Westinghouse SVEA-96 fuel assembly (Caraghiaur, D. et al. 2004). The pressure distribution
comparison between single- and two-phase flows for different subchannel positions and different
flow conditions has been performed over a spacer. The primary purpose of this work was to
support the development of a CFD code for BWR fuel bundle analysis.
2.3 Numerical Studies on the Spacer Grid Effects
A numerical study with the CFD code CFX (AEA Technology, 1997) has been performed to
examine the flow mixing in nuclear fuel assembly that is created by four typical mixing promoters:
split vanes, twisted vanes, side-supported vanes, and swirl vanes (In, W. K. et al., 2001). The
calculations demonstrated that the split and twisted vanes cause primarily a crossflow through the
gap region and a weak swirling flow in the subchannel. The swirl vanes produce the strongest
circular swirling flow that persists farther downstream of the spacer. The predicted axial and lateral
mean flow velocities and the turbulent kinetic energy in a rod bundle with split vanes were
13

validated against two experiments, Karoutas, C. Y. et al., 1995 and Shen, Y. F. et al., 1991, and
showed good agreement. The comparison of the pressure distribution indicated that the swirl vanes
result in a smaller pressure drop. The distance for effective flow mixing was estimated to be 15 to
20 hydraulic diameters from the top of the spacer by the swirling flow and 10 hydraulic diameters
by the crossflow. The turbulent kinetic energy rapidly decreased to a fully develop level in
approximately 5 to 10 hydraulic diameters downstream of the upper edge of the spacer.
Cui and Kim (Cui, X. Z. and Kim K. Y., 2003) have evaluated the effects of the mixing vane
shape on the flow structure and the downstream heat transfer by obtaining the velocity and pressure
fields, the turbulent intensity, the crossflow factors1, the heat transfer coefficient, and the friction
factor using the CFD code CFX-TASCflow (AEA Technology Engineering Software ltd., 1999). To
evaluate the heat transfer enhancement, a commercialized mixing vane design was compared to
mixing vane configurations with four different twist angles at a constant blockage ratio. Cui and
Kim concluded that the crossflow factor and the turbulent intensity are the factors that most
strongly affect the heat transfer downstream of the vane. Beyond 20 hydraulic diameters
downstream, the larger crossflow factor induced a larger turbulent intensity and thus a higher heat
transfer coefficient. The twist angle influenced the crossflow mixing between subchannels. The
crossflow increased with increasing the twist angle. Also, it was found that swirl does not
significantly affect the heat transfer, and at constant blockage ratio, both swirl and cross-flow do
not noticeably affect the friction factor.
The work of Cui and Kim has been extended by Kim and Seo (Kim, K-Y. and Seo J-W., 2005),
1 Crossflow factor is defined as ∫= dyVV
sF
bulk
crossCM
1, where is the distance between fuel rods, is the
crossflow velocity component, and is the axial velocity averaged over cross sectional area.
s crossV
bulkV
14

where the response surface method has been employed as an optimization technique and an
objective function has been defined as a combination of the heat transfer rate and the inverse of the
friction loss with a weighting factor. The blend angle and the base length of the mixing vane have
been selected as design variables. Numerical experiments have been performed with the CFD code
CFX-5.6. It was found that the heat transfer enhances with the increase in both bend angle and base
length. A close relationship between the swirl factor1 and the hear transfer rate was indicated. The
pressure loss increased with both design variables. The objective function was found to be more
sensitive (by a factor of ten) to the bend angle than to the base length.
Gu et al. (Gu, C-Y, et al., 1993) in their earlier work have also assumed the magnitude of swirl
(via a swirl factor) to be a qualitative indicator of the spacer design impact on the departure from
nucleate boiling performance of PWRs.
To improve the numerical predictions of the axial and lateral phase distributions in a BWR
assembly in a bubbly two-phase flow, Windecker and Anglart (Windecker, G. and Anglart, H.,
2001) proposed a methodology for modeling the effect of spacers by introducing additional
pressure drop and turbulence source terms in the momentum and turbulence equations of the CFD
code CFX4. The local pressure loss due to spacers was modeled by modifying the body force2. The
source of the turbulent kinetic energy was estimated as the work done by the drag force on the
1 Swirl factor is defined as ∫= dr
VV
RS
ar
tan1, where is the tangential velocity component the local axial
velocity component
tanV , aV
, r is the radial distance from the center, and R indicates the effective swirl radius.
2 UUKd
B spsph
ρ−
=2
1, where is the characteristic length of the spacer, is the flow velocity vector
is the local pressure loss coefficient.
sphd − U , spK
15

surrounding liquid and the source of dissipation of the kinetic energy was modeled as well1. The
model predictions were compared to measurements performed at the FRIGG loop of Westinghouse,
Sweden. Although the comparisons showed a good agreement, the well known problem of
overprediction of the vapor content in the corner region of the fuel bundle was not fully resolved.
In subchannel codes, the turbulent exchange of momentum, mass, and energy is commonly
modeled in a similarity to the molecular diffusion by assuming linear dependence between the
change rate of a given quantity and its gradient. That approach involves the definition of the
proportionality coefficient, the so-called turbulent diffusion coefficient or turbulent mixing
coefficient. Attempts were made in a numerical prediction of the single-phase mixing coefficient.
Recently two approaches of CFD evaluation of the single-phase mixing coefficient were published.
Ikeno (Ikeno, T., 2001) pointed out that the enthalpy exchange through the gap between rods
depends on large-scale turbulent structures, which cannot be resolved by the standard ε−k
turbulence model. To overcome this deficiency Ikeno adopted the Kim and Park flow pulsation
model (Kim, S. and Park, G.-S., 1997), but instead using an empirical correlation for the Strouhal
number for a flow pulsation through gaps without a spacer grid, an analytical formula was derived.
Ikeno (Ikeno, T., 2001) has performed comparative analyses which showed that when using the
standard ε− turbulence model the calculated mixing coefficientk 2 is one order of magnitude lower
than the one calculated with the modified model. The calculated axial distributions of the mixing
coefficient with and without the pulsation model were input into a subchannel code to predict
measured hot channel exit coolant temperatures in a PWR 5×5 fuel assembly mock-up. Results
1 3
21 UK
dS sp
sphk ρ
−
= , )2
( 3UKdC
kS sp
sph
se ρεε
−
= , where is the dissipation coefficient.
2 The mixing coefficient was calculated by turbulent viscosity
seC
tν : Uyt
∆=
νβ
16

showed a better agreement to experimental data when the mixing coefficient obtained with the
modified ε−k model was used.
More recently, Ikeno (Ikeno, T., 2005) proposed a computational model, based on a large
eddies simulation (LES) technique, for evaluation of the turbulent mixing coefficient. The use of
large eddies simulations is believed to contribute for modeling the anisotropy in the turbulent
energy distribution – the turbulent energy produced from the main flow was transferred
predominantly into the lateral component in the gap region.
The single-phase mixing coefficient can be evaluated from the heat transferred between
adjacent subchannels by the turbulent mixing1. This approach was used by Jeong et al. (Jeong, H. et
al., 2004). The total heat flux between two neighboring subchannels was evaluated by a balance of
the inlet and outlet heat flow rates into the two subchannel control volumes. The heat flux due to
turbulent mixing was defined by subtracting the heat flux due to molecular diffusion from the
transferred total heat flux.
2.4 Subchannel-Based Modeling of the Spacer Grid Effects
In regard to the critical power/critical heat flux prediction, in the subchannel codes the spacer
grid effects are mostly attributed to modeling of the entrainment and deposition and the heat
transfer augmentation downstream of the spacers (Ninokata, H., 2004b; Nordsveen, M. et al., 2003;
and Chu, K. H. and Shiralkar, B. S., 1993; Naitoh, M. et al., 2002). The droplets’ trajectory is
governed by the turbulence generated around spacers. Droplet-spacer collisions create additional
liquid film on the surface of the spacer and the liquid film run-off effect influences the deposition
1
TUcq
p
mixturb
∆−= _&
β , where s the heat transferred due to turbulent mixing, mixturbq _& i T∆ is the temperature difference.
17

rate and its axial distribution. However, entrainment and deposition effects are not among the
objectives of this PhD work and will be not addressed hereinafter.
Except for the work of Ikeno (Ikeno, T., 2001), no examples of modeling the spacer grids
influence on the lateral exchange of momentum, mass, and energy at a subchannel basis inside the
fuel rod bundles was found in the open literature. It is well known that the new spacer grid designs
with mixing promoters create significant crossflow through the gap regions due to flow deflection
and turbulent mixing. No references were found on how the spacer effect on the void drift is
modeled. Comprehensive modeling of the above listed phenomena is crucial for accurate prediction
of the thermal-hydraulic safety margins.
2.5 Concluding Remarks
The state-of-the-art in the modeling of the spacer grid effects on the thermal-hydraulic
performance of the flow in LWR rod bundles employs numerical experiments performed by CFD
calculations. The capabilities of the CFD codes are usually being validated against mock-up tests.
Once validated, the CFD predictions can be used for improvement and development of more
sophisticated models of the subchannel codes.
Because of the involved computational cost, CFD codes can not be yet efficiently utilized for
full bundle predictions, while subchannel codes equipped with advanced physics are a powerful tool
for LWR safety and design analyses.
18
CHAPTER 3
ADVANCED THERMAL-HYDRAULIC SUBCHANNEL CODE COBRA-TF - BASIC
MODELS AND DEVELOPMENT
COBRA-TF (COolant Boiling in Rod Arrays – Two Fluid) is an advanced thermal-hydraulic
subchannel code applicable to both PWR and BWR analyses. The code is widely used for best-
estimate evaluations of the nuclear reactors safety margins. The original version of the code was
developed at the Pacific Northwest Laboratory as a part of the COBRA/TRAC thermal-hydraulic
code (Thurgood, M.J., et al. 1983).
3.1 Overview of the COBRA-TF Models and Features
The two-fluid formulation, generally used in thermal-hydraulic codes, separates the
conservation equations of mass, energy, and momentum to each phase, vapor and liquid. COBRA-
TF extends this treatment to three fields: vapor, continuous liquid and entrained liquid droplets.
Dividing the liquid phase into two fields is the most convenient and physically reasonable way to
handle two-phase flows.
The COBRA-TF two-fluid, three-field representation of the two-phase flow results in a set of
nine time-averaged conservation equations. The averaging scheme is a simple Eulerian time
average over a time interval. The interval is assumed to be long enough to smooth out the random
fluctuations in the multiphase flow, but short enough to preserve any gross unsteadiness in the flow.
The general assumptions postulated in the COBRA-TF two-fluid phasic conservation equations
are: gravity is the only body force; no volumetric heat is generated in the fluid; radiation heat
19

transfer is limited to rod-to-drop and rod-to-steam; pressure is the same in all phases; viscous
dissipation is neglected in the enthalpy formulation of the energy equation; turbulent stresses and
turbulent heat flux of the entrained liquid phase are neglected; viscous stresses are partitioned into
fluid-wall shear and fluid-fluid shear; fluid-fluid shear in the entrained liquid phase is also
neglected; conduction heat flux is partitioned into a fluid-wall conduction term and a fluid-fluid
conduction term; and a fluid-fluid conduction term is assumed to be negligible in the entrained
liquid field.
Four mass conservation equations are solved, respectively for the vapor phase, continuous
liquid phase, entrained liquid phase, and non-condensable gas mixture. The non-condensable gas
mixture transport equation is solved explicitly at the end of each time step. The user can specify up
to eight species of different non-condensable gases. The mass conservation equations in a vector
form are:
TGU ⋅∇+Γ=⋅∇+ ''')( ραρα vvvvvvt∂
∂
(vapor) (3.1)
Tlllllll GSU
t⋅∇+−Γ−=⋅∇+
∂∂ '''''')( ραρα
(continuous liquid) (3.2)
'''''')( SUt eelele +Γ−=⋅∇+∂∂ ραρα
(entrained liquid) (3.3)
Tggvgggg GU ⋅∇+Γ=⋅∇+ ''')( ραρα
(non-condensable gas mixture) (3.4) t∂∂
Two energy conservation equations are solved, respectively for the vapor-gas mixture and
combined liquid field. The use of a single energy equation for the continuous liquid and entrained
droplets, which are assumed to be in equilibrium, implies that both fields are at the same
20

temperature for a given computational cell. In the regions where both liquid fields are present, this
assumption can be justified in the view of the large mass transfer rate between these two fields that
tends to draw both to a same temperature. This simplification in the numerical solution results in a
re vation equations in a vector form are: duced computational cost. The energy conser
( ) )()( '''''''' Tvgvvgivvgvvgvgvvgvgv qQqhUhh
tαραρα ⋅∇−++Γ=⋅∇+
∂∂
(vapor-gas mixture) (3.5)
( ) )T ()()( ''''''
lvlilflllllllel qQqhUhht
αραραα ⋅∇−++Γ=⋅∇++∂∂
(combined liquid field ) (3.6)
For each direction, axial and transverse, a set of three momentum equations are solved,
respectively for the vapor phase, continuous liquid phase, and entrained liquid phase, allowing the
liquid and entrained droplets fields to flow with different velocities relative to the vapor phase. The
momentum conservation equations in a vector form are:
( ))()(
)(
'''''''''''' TvgvIIwvvgvv
vvvgvvvgv
TUgP
UUUt
evlv ατττραα
ραρα
⋅∇+Γ+−−−+∇−
=⋅∇+∂∂
(vapor) (3.7)
( ))()()( '''''''''''' T
lllIwllll TUSUgP lv αττραα ⋅∇+−Γ−−−+∇−
)( lllllll UUUt
ραρα =⋅∇+∂∂
(continuous liquid) (3.8)
( ))()( '''''' USUgP
t
eIwelee
eeleele
ve +Γ−−−+∇−
∂∂
ττραα
(entrained liquid) (3.9)
)(
''''''
UUU =⋅∇+ ραρα
21

One of the most important features of COBRA-TF is that the code was developed for use with
either rectangular Cartesian or subchannel coordinates. This flexibility allows a fully three-
dimensional treatment in geometries amenable to description in a Cartesian coordinate system. For
mor
btained at the cell center. The momentum equations are solved on
stag
At the first stage of the COBRA-TF numerical solution process, using currently known values
for all variables, the momentum equations are solved for each cell and estimates of the new time
step fields’ mass flow rates are obtained. All ex lso
e complex or irregular geometries, the user may select only a subchannel formulation or a
mixture of rectangular Cartesian and subchannel coordinates. In the subchannel formulation fixed
transverse coordinates are not used. Instead all transverse flows are assumed to occur through gaps
between the fuel rods. Only one transverse momentum equation applies to all gaps regardless of the
gap orientation.
A typical finite-difference mesh is used in COBRA-TF for solving the scalar continuity and
energy equations (mass/energy cell). The fluid volume is partitioned into a number of
computational cells. The equations are solved using a staggered difference scheme. The phase
velocities are obtained at the cell faces, while the state variables - such as pressure, density,
enthalpy, and void fraction - are o
gered cells that are centered on the scalar mesh face. COBRA-TF two-fluid three-field finite
difference equations are written in a semi-implicit form using a donor cell differencing for the
convective quantities. These equations must be simultaneously solved, to obtain a solution for the
fields’ mass flow rates. The process must be completed in a reasonable amount of time and must
converge to the correct solution.
plicit terms in the momentum equations are a
computed at this stage and they are assumed to stay constant for the rest of the time step. The semi-
implicit momentum equations are written in a matrix form as follows:
22

⎪⎭
⎫
⎪⎩
⎧
∆−
∆−−
⎪⎭
⎫
⎪⎩
⎧
⎥⎥⎦
⎤
⎢⎢⎣
⎡
−
−
P
Pb
f
f
ed
dc
e
v
l
33
22
11
33
222
11
10
01
1 3
as momentum efflux terms and the gravitational force; 1b ,
⎪⎬
⎪⎨
−∆−−=⎪⎬
⎪⎨⎥⎢ −
baPba
afedc 1
(3.10)
where , and are constants standing for the explicit terms in the momentum equations such
, and are the explicit portion of the
pressure gradient force term; and are the explic actors that multiply the liquid flow rate in
the left side should be identically equal to zero. The energy and mass
equations will not generally be satisfied when the new velocities computed from the momentum
equations are used to compute the convective terms in these equations. There wil sidual
a , 2a a
2b 3b
1 2
the wall and interfacial drag terms; 1d , 2d , and 3d are the explicit factors that multiply the vapor
flow rate in the wall and interfacial drag terms; and 2e and 3e are the explicit factors that multiply
the entrained liquid flow rate in the wall and interfacial drag terms. Eq.3.10 is solved by Gaussian
elimination and the fields’ mass flow rates are computed.
As a second stage, the tentative velocities are calculated to be used in the linearization of the
mass and energy equations. If the right hand side (RHS) of each of the mass and energy equations is
moved to the left hand side (LHS), and if the current values of all variables satisfy the equations,
the sum of the terms on
c c it f
l be some re
error in each equation as a result of the new velocities and the changes in the magnitude of some of
the explicit terms in the mass and energy equations. The vapor mass equation, for example, has a
residual error given by:
( ) ( )[ ] ( )[ ] ( )[ ]( )[ ]
jj
NKK
LjLvvvL
NB
KB j
mvvvNA
KA j
mvvvn
CV x
S
xx
AU
x
AU
t
A
∆∆
Γ
∆∆∆
−
=== 111
~ jcvjKBjjKAjjjcjvvjvv VSE −−−−+= ∑∑∑ −− 11 *~*~* ραραραρα
(3.11)
In Eq.3.11 the star symbol (*) indicates donor cell quantities, the superscript n denotes quantities at
ρα
23

new time step, the symbol (~) over the velocities indicates that they are tentative values computed
from the momentum equations, and all terms are defined using currently known values of each of
the variables. The variation of each of the independent variables required to bring the residual errors
to zero can be obtained using block Newton-Raphson method. This is done by linearizing the
equations with respect to the independent variables αv, αvhv, (1-αv)hl, αe and the pressure of the
actual cell, Pj, and those in contact with it, Pi, (index i is varying from 1 to the total number of cells
NCON in contact with the one of interest). The flowing matrix equation (Eq. 3.12) is obtained for
each cell:
⎪⎪
⎪
⎭
⎬
⎪⎪
⎪
⎩
⎨−=
⎪
⎪⎪
⎪
⎭
⎬
⎪
⎪⎪
⎪
⎩
⎨⋅
⎥⎥
⎥⎥
⎥⎥
⎢⎢
⎢⎢
∂∂
∂∂
∂∂
∂∂
−∂∂
∂∂
∂∂
∂∂
∂∂∂∂∂∂∂∂
∂∂∂∂∂∂∂
=
=EV
EL
CE
NCONi
i
j
e
EVEVEVEVEVEVCGEV
ELELELELELELELEL
CECECECECECECEE
E
E
P
PP
PE
PE
PEE
hE
hEEE
EEEEEEEE
EEEEEEE
δ
δδδα
ααααα
M
L
L
L
1
)1(
⎪
⎪⎪⎪⎪⎫
⎪
⎪⎪⎪⎪⎧
⎪
⎪
⎪⎪⎪⎪⎪
⎪
⎪
⎪⎪⎪⎪⎪
−
⎥
⎥
⎥
⎥⎥⎥⎥
⎥
⎦⎢
⎢
⎢⎢⎢⎢
⎢
⎢
⎣
∂∂∂∂−∂∂∂∂
∂∂∂∂−∂∂∂∂∂
∂∂
∂∂
∂∂
∂∂
−∂∂
∂∂∂
∂∂∂∂−∂
=
=
=
=
=
CV
CL
CG
lv
vv
v
NCONijelvvvvg
NCONijelvvvvg
NCONijelvvvvg
C
NCON
CV
i
CV
j
CV
e
CV
lv
CV
vvvg
NCONijelv
E
EEE
hh
PPPhh
PPPhhE
PE
PE
PEE
hE
h
PPPh
αδδα
ααααα
ααααα
ααααα
αα
L
L
L
1
1
1
1
1
)1(
)1(
)1(
)1(
)1(
(3.12)
or written in an operator form:
(3.13)
where [R(x)] is th
⎪⎫
⎪⎧
⎥⎥
⎤
⎢⎢
⎢⎢
⎡
∂∂∂
∂∂∂∂∂∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
−∂∂
∂∂
∂∂
∂∂
= g
CVCVCV
CLCLCLCLCL
vv
CL
v
CL
g
CL
NCON
CG
i
CG
j
CG
e
CG
lv
CG
vv
CG
v
CG
g
CG
EEE
EEEEEh
EEEPE
PE
PEE
hE
hEEE
δαδα
ααα
ααααα 1)1(
( )[ ]{ } E)x(xR −=δ
e Jacobian of the system of equations evaluated for the set of independent
variables (x) and composed of analytical derivatives of each equation with respect to linear
variation of independent variables; δ is the solution vector containing these linear variations; and E
is the errors’ vector.
Once all derivatives are calculated, the former system (Eq.3.12) is analytically reduced using
24

the Gaussian elimination technique to obtain solutions for the independent variables. Void fraction
related variables and pressure of the actual cell depend on the pressure of adjacent cells (Eq. 3.14).
⎪
⎪⎪
⎭
⎪⎪⎪
⎫
⎪
⎪⎪
⎩
⎪⎪⎪
⎧
⎪⎪
⎪⎪
⎭
⎪⎪⎪⎪⎪
⎫
⎪⎪
⎪⎪
⎩
⎪⎪⎪⎪⎪
⎧
−
⎥
⎥⎥
⎥⎥
⎦
⎤
⎢
⎢⎢
⎢⎢
⎣
⎡
=
=+
+
+
+
+
+
6
5
4
3
2
1
1)6(66766
)6(5575655
)6(447464544
)6(33736353433
)6(2272625242322
)6(117161514131211
)1(
000000000
00000
aaaa
a
P
hh
rrrrrrrrrrrrrrrrrr
rrrrrrrr
NCONi
i
j
lv
v
g
NCON
NCON
NCON
NCON
NCON
NCON
δ
αδδαδαδα
ML
L
L
L
L
(3.14)
After reducing the system, an equation of the form
⎪
⎪
⎬
⎪
⎪
⎨−=
⎪
⎪
⎪
⎬
⎪
⎪
⎪
⎨⋅
⎥
⎥
⎥
⎢
⎢
⎢ 0 a
P
P
rrrrrrr
e
vv
δ
δ
δα
L
∑ δ+=δ=
PgaP
In regard to the system of pressure equations, the size of this system depends on the number of
cells in the problem. The dimension of the matrix is a square of the number of cells. For a case with
a small number of cells the equations’ set may be solved by direct inversion. For a case with a large
number of mesh cells the Gauss-Seidel iterative technique is recommended. This technique is based
on s
NCON
1iiij (3.15)
is derived for each cell. Thus, in order to obtain the pressure variation for each cell, a system with a
number of equations equal to the number of computational cells should be solved. After this step
the linear variation of the other independent variables is unfolded.
plitting the mesh cells in groups of cells that greatly influence each other. These groups of cells
are called simultaneous solution groups. The equations’ set is split in the same way. When a given
solution group is being solved, the values of δPj for the cells that do not belong to this group are set
to the previously calculated values. The multiplication of the pressure matrix by the independent
variables’ vector produces a linear system with the same number of equations as the number of cells
25

in the solution group. This linear system is solved by Gaussian elimination. The Gauss-Seidel
iteration is carried out over the groups of cells to obtain the new pressure vector. Convergence is
reached when the change in δPj for each cell fulfills a specified convergence criterion. The
convergence rate, and thus the efficiency of the iteration, can be enhanced by using a process called
reba
equations are written in a semi-implicit form using
dono
those described by the second set are called “hot wall” flow regimes. Flow regimes
lancing. The process involves obtaining an initial estimate for the pressure variation in each
cell (otherwise the linear pressure variation in each cell is set to zero). During the rebalancing, the
multi-dimensional mesh is reduced to a one-dimensional and then a solution for the pressure
variation at each level of the one-dimensional problem is obtained by direct inversion. Then, the
one-dimensional solution for the linear pressure variation at each level is used as an initial guess for
the linear pressure variation in each mesh cell on that level in the multi-dimensional problem.
Since the COBRA-TF finite-difference
r cell differencing for the convective quantities, the time step is limited by the material Courant
limit. Before the solution process proceeds to the next time step, evaluations are made on the values
of the new calculated variables to assure that their time variations fall within reasonable limits. If
these new time variables have nonphysical values or their time variations are unreasonably large,
then the solution is returned to the beginning of the time step. The variables are set to their old time
values, the time step is halved and repeated. This is done in such a way that the linearized equations
will be sufficiently representative of the nonlinear equations to provide an acceptable level of
accuracy in the calculation.
The flow regime map used in COBRA-TF can be divided into two main parts: logic used to
select a physical model in an absence of unwetted hot surfaces and logic used in a presence of
unwetted hot surfaces. The flow regimes described by the first set of logic are called “normal” flow
regimes, while
26

are
plets deposition and entrainment is allowed in the falling film regime. An inverted
annu
The heat transfer models in COBRA-TF determine the material heat release rates and the
temp
determined from fluid properties and flow conditions within each cell or in the immediate
surrounding cells. Since the code was developed for vertical two-phase flow simulations,
horizontal flow regimes are not considered.
The “normal” flow regime logic considers dispersed bubbly flow, slug flow, churn-turbulent
flow, film flow, and film mist flow. The “hot wall” flow regimes include subcooled inverted
annular flow, saturated liquid chunk flow, dispersed droplets-vapor flow, falling film flow, and top
deluge. Dro
lar flow regime is assumed during a bottom reflood if the continuous liquid phase is subcooled.
Entrainment of liquid is allowed, permitting a transition to dispersed flow based on the physical
models for the entrainment rate and droplet-vapor interfacial drag. The deposition and breakup of
droplets on grid spacers are also considered.
The COBRA-TF code considers the following de-entrainment mechanisms: de-entrainment in
the liquid film, de-entrainment in the cross-flow, de-entrainment at area changes, and de-
entrainment at solid surfaces and liquid pools. In addition, the code accounts for droplet breakup at
spacer grids.
erature response of the fuel rod and structural components of LWRs during operational and
transient conditions. At the beginning of each time step, before the hydraulic solution proceeds, all
the heat transfer calculations are performed. Heat transfer coefficients based on previous time step
liquid conditions are used to advance the material conduction solution. The resultant heat release
rates are explicitly coupled to the hydrodynamic solution as source terms in the fluid energy
equations.
27

The COBRA-TF conduction model specifies the conductor geometry and material properties,
and solves the conduction equation. The “rod” model is designed for nuclear fuel rods, heater rods,
tubes, and walls. The model consists of options for one-dimensional (radial), two-dimensional
(radial and axial), and three-dimensional (radial, axial and azimuthal) heat conduction. This
flexibility allows the user to simulate most of the conduction geometries found in the reactor
vess
a connection to a different
fluid channel.
the radial heat transfer. The large axial computational
mesh spacing usually used in coupled thermal-hydraulic numerical simulations of rewetting cannot
adequately resolve the axial temperature profile and surface heat flux across the quench front.
During the quenching the entire boiling curve can be encompassed by one hydrodynamic mesh cell.
This can lead to stepwise cell-by-cell quenching, producing flow oscillations that can obscure the
correct hydrodynamic solution. In the COBRA-TF fine mesh-rezoning technique, fine mesh heat
transfer cells with axial and radial conduction are superimposed on coarse hydrodynamic mesh
spacing, and a boiling heat transfer package is applied to each node. It should be noted that the fine
mesh nodes are stationary and do not have a fixed mesh spacing. Thus, the fine mesh nodes are split
to create a graduated mesh spacing that re-adjusts itself constantly to a changing axial temperature
gradient.
els. In addition, an unheated conductor model is provided for structural heat transfer surfaces.
Moreover, using the COBRA-TF three-dimensional rod model, the fuel rod may be modeled with
up to eight individual circumferential sections with each section having
The quench front model is a “fine mesh-rezoning” method that calculates a quench front
propagation due to the axial conduction and
The COBRA-TF gap conductance model dynamically evaluates fuel pellet-clad conductance
for a nuclear fuel rod. The model computes changes in the fuel rod structures and fill gas pressure
28

that affect the gap conductance and fuel temperature during a transient.
The subchannel-based radiation model for rod-rod, rod-vapor, and rod-droplet radiation heat
transfer was developed and implemented in COBRA-TF in order to simulate a reflood phase of
loss-of-coolant accident (LOCA) transients.
The COBRA-TF heat transfer package consists of a library of heat transfer coefficients and a
selection logic algorithm. Together these produce a boiling curve that is used to determine the
phasic heat fluxes. The maximum of the Dittus-Boelter turbulent convection correlation (Dittus, F.
W. a
conv
g the subcooled boiling, a
vapor generation occurs and a significant void fraction may exist despite the presence of subcooled
water. The processes of interest in this regime are the forced convection to liquid, vapor generation
at t
nd Boelter, L. M. K., 1930), the FLECHT SEASET 161-rod steam cooling correlation (Wong,
S. and Hochreiter, L. E., 1981), and a laminar flow Nusselt number is used to determine the single-
phase vapor heat transfer coefficient. For single-phase convection to vapor, all vapor properties are
evaluated at the liquid film temperature. Convection to single-phase liquid is computed as the
larger of either Dittus-Boelter turbulent convection correlation or laminar flow with a limit Nusselt
number equal to 7.86. When the surface temperature is greater than the saturation temperature but
less than the critical heat flux temperature and liquid is present, the Chen nucleate boiling
correlation (Chen, J. C., 1963) is used. The Chen correlation applies to both saturated nucleate
boiling region and two-phase forced convection evaporation region. The transition to a single-phase
ection at low wall superheat and pool boiling at low flow rate is automatically performed. The
Chen correlation assumes a superposition of a forced-convection correlation (Dittus-Boelter type)
and a pool boiling equation (Forster-Zuber). An extension of the Chen nucleate boiling correlation
into the subcooled region is used for subcooled nucleate boiling. Durin
he wall, condensation near the wall, and bulk condensation (subcooled liquid core).
29

The COBRA-TF critical heat flux package consists of three regimes – pool boiling, forced
convection departure from nucleate boiling (DNB), and annular film dryout. Pool boiling DNB is
selected when the mass flux is less than 30 g/cm2-sec and the flow regime is not annular film flow.
The pool boiling heat flux is given by Griffith’s modification (Griffith, P. et al., 1977) of the Zuber
equation (Zuber, N. et al., 1961). Forced-convection DNB is considered when the mass flux is
greater than 30 g/cm2-sec and the flow regime is not annular film flow. In this case, the critical heat
flux is given by the Biasi correlation (
The COBRA-TF code employs a simple additive scheme for heat transfer beyond the critical
heat flux temperature. The transition boiling heat transfer is composed of both liquid contact (wet
wall) and film boiling (dry wall). Heat transfer in the film boiling region is assumed to result either
from dispersed flow film boiling or from inverted annular film boiling.
odifications as compared to the original code version.
Biasi, L. et al., 1967). Annular film dryout is assumed if the
mass flux is greater than 30 g/cm2-sec and annular film flow exists. In this regime, the heat flux is
not limited by a correlation, but rather forced convection vaporization exists until the film dries out.
3.2 Worldwide COBRA-TF Development and Applications
The previous section discussed COBRA-TF models as originally developed in early 1980s.
Since then, various academic and industrial organizations adapted, developed and modified the
code in many directions. The COBRA-TF1 version owned by PSU originates from a code version
modified in cooperation with the FLECHT SEASET program (Paik, C. Y. et al., 1985). The
following sections will discuss the code m
1 This code version will be called COBRA-TF_FLECHT SEASET from now on.
30

3.2.1 COBRAG (General Electric Nuclear Energy, USA)
COBRAG is an improved version of COBRA-TF developed by General Electric Nuclear
Energy. There are articles published in 1990s that discussed the COBRAG models improvements as
well as the assessment of the code capability of predicting critical power at steady state and
transient conditions (Chu, K. H. and Shiralkar, B. S., 1993; Chen, X. M. and Andersen, J. G. M,
1997a Ch l void distribution in
BWR fuel bundles (Chu, K. and Shiralkar, B. S., 1992 and Chen, X. M. and Andersen, J. G. M,
1997b). The major improvements comparing to the original COBRA-TF code are as follows.
t rod surfaces within a subchannel could have very different heat
generation rates and surface characteristics, the model allows for four film segments around a fuel
rod. Critical power is controll modeled as a balance between
eva
rporated in COBRAG.
downstream turbulence enhancement, and collection and run-off at the spacer.
; and en, X. M. and Andersen, J. G. M, 1999) and the cross sectiona
An individual film thickness model has been introduced: the liquid films on different surfaces
within a subchannel have their own set of conservation equations (Shiralkar, B. S. and Chu, K. H.,
1992). Since the differen
ed by the film dryout, which is
poration, entrainment and deposition processes leading to a critical film thickness in an annular
flow regime.
To account for the void drift phenomenon the model by Drew and Lahey (Drew, D. A. and
Lahey, R. T., 1979) has been inco
A spacer model has been developed and implemented into COBRAG to account for the spacer
effects on the critical power. A semi-empirical approach has been applied to formulate the spacer
model. The model analyzes the major effects of the spacer on the flow distribution by focusing on
the mechanisms which influence the film flow rate on the fuel rods: upstream film thinning,
31

3.2.2 WCOBRA/TRAC (Westinghouse Electric Company, USA)
WCOBRA is a part of the Westinghouse Electric Company WCOBRA/TRAC-MOD7A code
package licensed for best-estimate LOCA analyses. The package is an improved version of the
COBRA/TRAC code. The achievements in the WCOBRA/TRAC development are in the area of
code performance in large break loss LOCA transient simulations (Takeuchi, K. et al., 1998 and
Bajorek, S. M. et al, 1998).
3.2.3 F-COBRA-TF (AREVA NP GmbH, Germany)
Currently COBRA-TF is being developed and qualified for reactor core thermal-hydraulic
design analyses at AREVA NP GmbH (Germany). The work was started within the scope of
coope w NP GmbH version of the
code is named F-COBRA-TF1.
ew3D).
The major model improvements consist of a new individual film model and an improved
criterion for transition between different flow regimes (Glueck, M., 2006).
In the implemented individual film model, liquid films on each boundary structure of a given
subchannel (rod segment or bounding wall) are balanced individually with regard to the
ration ith the Pennsylvania State University. The official AREVA
A software package has been developed at AREVA NP GmbH to enable the code for
industrial applications (Glueck, M. and Kollmann, T., 2005). The package include a preprocessor
(INCA input generator for a wide variety of PWR and BWR rod bundles), a solver (F-COBRA-TF)
and two postprocessors – for a one-dimensional visualization (PLOCOB) and for a three-
dimensional visualization (CoreVi
development performed by the author of this PhD thesis will be summarized in Section 3.3.
1 This section discusses the code modifications carried out without the PSU participation. The F-COBRA-TF
32

evaporation, entrainment, and deposition.
In addition to the original COBRA-TF flow regime logic, two new approaches, based on the
work by Taitel et al. (Taitel, Y. et al., 1980) and Mishima and Ishii (Mishima, K. and Ishii, M.,
1984) have been implemented in F-COBRA-TF.
A
Drew and Lahey’s void drift model, where the void drift
coeff s c 5a).
3.2.4 COBRA-TF (Korean Power Energy Company, Korea)
very interesting work on COBRA-TF extension to a system code has been performed at the
Korean Power Energy Company (Park, C. E. et al., 2005). Horizontal flow channel modeling
capability has been introduced for simulations of the horizontal pipes in nuclear reactor system. A
point kinetics model is utilized for simulation of the core neutronic response. The code
modifications have been verified against pressurized level control system (PLCS) malfunction and
main steam line break (MSLB).
3.2.5 MARS (Korean Atomic Energy Research Institute, Korea)
The best-estimate system code MARS has been developed at the Korean Atomic Energy
Research Institute (Lee, S. Y. et al., 1992 and Jeong, J.-J. et al., 1999). The code is a merged
version of the system code RELAP5/MOD3 and the subchannel code COBRA-TF. COBRA-TF has
been adapted as a three-dimensional module in MARS (Jeong, J.-J. et al., 2004). The code
improvements consist of a translation to FORTRAN90 language, an implementation of an equal-
volume exchange model and the
icient i alculated as function of the pressure (Jeong, J.-J. et al., 200
33

3.2.6 COBRA-TF (Japan Atomic Energy Research Institute, Japan)
An extensive program for COBRA-TF assessment and improvement for predicting dryout type
CHF en 90s (Murao, Y.
et al., 1993 and Okubo, T. et al., 1994). The performed modeling modifications have focused on
phenomena as the entrainment and deposition, the single- and two-phase mixing, and the critical
heat flux. The new entrainment/deposition model has been based on the correlation by Wurtz’s
(Wurtz, J., 1978) and Sugawara’s (Sugawara, S., 1990).
has be carried out at the Japan Atomic Energy Research Institute in early 19
Nevertheless that it is not officially stated, it is believed that this particular version of COBRA-
TF was used as a base of the currently developed code NASCA (New Advanced Sub-Channel
Analysis) (Ninokata, H. et al., 2001, Hotta, A. et al., 2004, and Shirai, H. et al., 2004). Most
recently, a tremendous amount of academic efforts and financial support from industrial, private
and government organizations in Japan have been put in the NASCA development (Ninokata, H. et
al., 2004a). This level of efforts will most likely make the code one of the major competitors among
the commercial subchannel codes.
er LU library and Krylov non-stationary iterative methods for solution of the
SU and
University Polytechn f Madrid (UPM) (Cuervo, D. et al., 2004 and Cuervo, D. et al., 2005).
3.2.8 COBRA-TF (Pennsylvania State University, USA)
University originates from a code version modified in cooperation with the FLECHT SEASET
3.2.7 COBRA-TF (University Polytechnic of Madrid, Spain)
The COBRA-TF computational efficiency was improved by implementing two optimized
matrix solvers, Sup
linear system of pressure equations. The work was performed in cooperation between P
ic o
As it was mentioned above, the COBRA-TF version owned by the Pennsylvania State
34

program (Paik, C. Y. et al., 1985). Besides the code utilization to teach and train students in the area
of nuclear reactor thermal-hydraulic safety analyses, the code has undergone different assessment
studies as well as development and improvement of the two-phase flow models. The work of Ergun
(Ergun, S. et al., 2005a) contributes in introducing a smaller droplet field as an additional field in
the
ns are
the works of Solís, (Solís, J. et al., 2004), and Ziabletsev (Ziabletsev, D. et al., 2004).
3.3
The cooperation between the Pennsylvania State University and AREVA NP GmbH (former
Siemens KWU) started in 1999 as a joint project for coupling COBRA-TF with the Siemens
Nuclear Power system code RELAP5/PANBOX. In the coupling scheme COBRA-TF replaced
CO
ainst PANBOX/COBRA 3–CP was performed (Ziabletsev, D. and Böer, R.,
2000)
F e moved in the direction of stand-alone
COBRA-TF development, qualifications, and validation for LWR analyses (Frepoli, C. et al.,
COBRA-TF conservation equations. The work of Holowach (Holowach, M. J. et al. 2002) is
important in modeling of the fluid-to-fluid shear in-between calculational cells over a wide range of
flow conditions. Other examples for a high quality COBRA-TF development and applicatio
Most recently, a three-dimensional neutron kinetics module was implemented into COBRA-TF
by a serial integration coupling scheme to the PSU Nodal Expansion Method (NEM) code
(Avramova, M. N. et al., 2006a, Tippaykul, C. et al., 2007). The new PSU coupled code system was
named CTF/NEM.
F- COBRA-TF Improvements Performed under the AREVA NP GmbH
Sponsorship
BRA 3-CP code and an initial testing of the functionality of the new coupled system and
benchmarking ag
.
urther, the joint PSU-AREVA NP GmbH efforts wer
35

200
The F-COBRA-TF validation program consists of a large set of simulation problems
repre e d transient conditions.
3.3.1.1 Translation to FORTRAN 90/95 Language
1a, 2001b; Kronenberg, J. et al., 2003; and Avramova, M.N. et al., 2002, 2003a, 2003c).
Since 2003, under the name F-COBRA-TF, the COBRA-TF code is adopted as an in-house
AREVA NP GmbH subchannel code for reactor core thermal-hydraulic design analyses. A special
F-COBRA-TF validation/verification and models development program was established. PSU has a
significant contribution to both, assessment of the current F-COBRA-TF models and development
of new F-COBRA-TF models.
sentativ of LWR nominal operating and anticipate
In addition, as a part of the F-COBRA-TF models development program, several improvements
and modifications were performed in order to enhance code predictive capability for LWR steady
state and transient analysis.
To improve the F-COBRA-TF computational efficiency, the code numerical methods were
revised as well.
3.3.1 F-COBRA-TF Coding Improvements
The original COBRA-TF code was written for CDC 7600 operation platform. Later the source
was
to set the arrays’ dimensions through PARAMETER operators. However, the
FO
adapted for a PC environment by removing machine dependent features and some old non-
standard FORTRAN statements. The code was based on static allocation memory and the special
header file was used
RTRAN90 dynamic allocation memory option is preferable to the static allocation memory
because of the optimized memory usage. Thus, in order to enhance code performance, the code was
36

translated to the FORTRAN 90/95 standards (Avramova, M. N., 2003b).
3.3.1.2 F-COBRA-TF Dump/Restart Capability
e dump/restart code logic by including also the so-called “full” restart
(Avramova, M. N., 2004a
ent
In the original stand-alone version of COBRA-TF only a “simple” dump/restart is possible.
During the “simple” restart run the user is allowed to change only the time domain data, but not the
power distribution and the flow conditions. To improve the code dump/restart capability it was
decided to recover th
). During the “full” restart run, the user can specify changes in the
operating conditions, power distribution, boundary conditions, printout options, and the time
domain data.
3.3.1.3 User Friendly Code Environm
es are not user-friendly oriented. In particular,
COBRA-TF code has a com
is, very often, not clear for an inexperience user. Along with the formatted input deck syntax and
the lack of an adequate warning/error reporting, this created an environment for user-related errors.
To overcome the problem, an unformatted input deck structure was adapted in the F-COBRA-TF
code (Avramova, M. N., 2004a). This improvement automatically allowed the use of SI units
instead of British units, traditionally used in COBRA-TF. The convergence between both units
systems has been coded in the original code version, but SI units could not be used because of the
Since F-COBRA-TF is being developed for industrial applications, the code input/output
procedures must be settled in such a way that the possibility of user-introduced errors is minimized
as much as possible.
It is common that most of the old computer cod
plicated input structure requiring a great amount of information which
37

required input format.
In addition, an automated input deck cross-checking procedure was introduced as well
(Avramova, M. N., 2004b). While reading the input deck, the code is performing an internal
checking for user-introduced errors and a warning/error message is immediately given.
3.3.1.4 Code Maintenance
The PSU activities related to the F-COBRA-TF assessment and development are subjected to
the quality assurance (QA) program established in the Reactor Dynamic and Fuel Management
Group (RDFMG), Nuclear Engineering Program. The RDFMG QA program was reviewed and
approved by AREVA NP GmbH (Schlee, H., 2006).
Independently, an internal quality assurance is being performed in AREVA NP GmbH as well.
3.3.2 F-COBRA-TF Numerical Methods Improvement
3.3.2.1 Background
One of the major drawbacks of the early developed subchannel codes is their poor
computational efficiency. The increased use and importance of detailed reactor core descriptions for
LWR subchannel safety analysis and coupled local neutronics/thermal-hydraulics evaluations
require improvements of the subchannel code numerical methods performance and efficiency in
order to obtain reasonable running times for large problems. For two-fluid codes, such as COBRA-
TF, due to the extended set of complex equations, the necessity of highly efficient numerical
method is even more pronounced. An exhaustive analysis of the CPU times needed by the code for
different stages in the solution process has revealed that the solution of the linear system of pressure
equations is the most time consuming process.
38

There are two numerical methods originally implemented in COBRA-TF: direct inversion and
Gauss-Seidel iterative technique. The first one is only recommended for cases with a small number
of cells. The second one belongs to the group of stationary iterative methods. As described in
Section 3.2.7, the performance of currently existing solvers was investigated in the work of Cuervo
and Avramova (Cuervo, D. et al., 2004 and Cuervo, D. et al., 2005). It was found that when direct
inversion is used the subroutine performing the pressure matrix solution is taking more than 70
p of th
Gauss-Seidel up the pressure matrix solution
especially for large cases but
ercents e total CPU time for large cases and less than 30 percents for small cases. The
technique shows contradictory results: it speeds
greatly slows it down for cases with non-stationary mass flow
conditions. In order to improve the code efficiency two optimized matrix solvers, Super LU library
(Demmel, J. W. et al., 2003) and Krylov non-stationary iterative methods (Saad, Y., 2000) were
successfully implemented in the PSU/UPM version of COBRA-TF for solution of the linear system
of pressure equations. The performed comparative analyses demonstrated that for large cases, the
implementation of the bi-conjugate gradient stabilized method (Bi-CGSTAB) combined with the
incomplete LU factorization with dual truncation strategy pre-conditioner reduced the total
computational time by factors of 3 to 5. Both new solvers converge smoothly regardless of the
nature of simulated cases and the mesh structures. They show better accuracy comparing to the
Gauss-Seidel iterative technique for all investigated test cases. Based on this experience, Krylov
non-stationary iterative methods were chosen for implementation in F-COBRA-TF code for
solution of the linear system of pressure equations (Avramova, M. N., 2005a).
39

3.3.2.2 Implementation of Krylov Non-Stationary Iterative Methods for Solution of the F-
COBRA-TF Linear System of Pressure Equations
The term “iterative method” refers to a wide range of techniques that use successive
approximations to obtain more accurate solutions to a linear system at each step. Stationary
methods are older and simpler to understand and implement but usually not very effective. Non-
stat
gence of the iterative
me
ar reactors thermal-hydraulic problems. The application of
pre
ire (Allaire, G., 1995)
has
ionary methods are a relatively recent development; their analysis is usually more difficult to
understand but they can be highly efficient. The non-stationary methods are based on the idea of
sequences of orthogonal vectors. An exception is the Chebyshev iteration method, which is based
on orthogonal polynomials. The rate at which an iterative method converges depends greatly on the
spectrum of the coefficient matrix. Hence iterative methods usually involve a second matrix that
transforms the coefficient matrix into one with a more favorable spectrum. The transformation
matrix is called a preconditioner. A good preconditioner improves the conver
thod sufficiently to overcome the extra cost of constructing and applying the preconditioner.
Indeed without a preconditioner the iterative method may even fail to converge.
The superior performance of Krylov solvers, as compared to the stationary iterative methods,
has been well documented for the nucle
conditioned conjugate gradient methods to the linearized pressure equation is presented in the
work of Turner and Doster (Turner, J. and Doster, J., 1991). Downar and Joo (Downar, T. and
Joo, H., 2001) have applied the Bi-CGSTAB method to obtain the continuity equation solution in
VIPRE-02, which is a two-fluid two-field code for subchannel analysis. Alla
utilized a preconditioned Krylov solver for the solution of the linearized three-dimensional
two-phase flow equations of the subchannel code FLICA-4 developed at CEA, France.
40

The SPARSKIT2 library (Saad, Y., 2000) includes subroutines with most of the Krylov solvers
and preconditioners. The library was created by CSRD, University of Illinois and RIACS (NASA
Ames Research Center) under the sponsorship of NAS System Division and US Department of
Energy. The subroutines are coded in Fortran 77. The SPARSKIT2 library is free software; it can
be redistributed and/or modified under the terms of the GNU General Public License as published
by the Free Software Foundation (Copyright (C) 1989, 1991 Free Software Foundation, Inc., 675
Mass Ave, Cambridge, MA 02139, USA). The library is available via Internet.
The SPARSKIT2 library was utilized for the F-COBRA-TF pressure matrix solution by use of
coupling subroutines. The original F-COBRA-TF numerical solution logic was described in Section
3.1. Here, flow-chart of the solution scheme is given in Figure 1. The F-COBRA-TF/SPARSKIT2
coupling scheme is shown in Figure 2.
In the original COBRA-TF code, the selection of the numerical method for the pressure matrix
solu
ary was performed by developing two additional
subroutines. The first subroutine is an alternative to the original F-COBRA-TF pressure matrix
solver and the second subroutine is a bridge to the SPARSKIT2 library. The first subroutine, the
“alternative”, consists of the following steps: 1) changing the pressure matrix format to Compressed
Sparse Format (CSR) as required by the library; 2) calling the preconditioner; 3) calling the Krylov
solver (via the bridge subroutine); and 4) re-assigning the solution. In order to interrupt the original
coding as little as possible, the “alternative” subroutine is called from the original F-COBRA-TF
solver and thus replacing the Gauss-Seidel iterations loop. The user can select, as an input option,
tion is done by the user. If the user specifies only one simultaneous solution group, the pressure
matrix will be solved with Gaussian elimination (direct inversion). In case of more than one
simultaneous solution groups Gauss-Seidel iterative technique will be used.
The coupling to the SPARSKTI2 libr
41

between the direct inversion, the Gauss-Seidel iterative method, and the Krylov solver.
From sensitivity studies, preformed among all the solvers and preconditioners available in the
SPARSKIT2 library, the combination of Bi-Conjugate Gradient Stabilized (BCGSTAB) method
and incomplete LU factorization with dual truncation mechanism (ILUUT) was found to be the best
in the computational efficiency achievement. However, links to the rest of the solvers and
preconditioners are coded as well and can be activated if desired.
To investigate the efficiency of the new pressure solver for the system of pressure equations, a
test matrix was established. The test matrix contains six test cases, which differ each from other by
the number of computational cells and the simulated conditions (steady state or transient). The
following is a short description of the cases.
42

Solution of momentum equations
Linearization of mass, energy equations
Block Newton-Raphson method
Solution of the pressure matrix
Direct?
Gaussian elimination
Y
Perform one iteration step in Gauss-Seidel
δP converged?
Figure 1: COBRA-TF numerical solution flow-chart
Unfolding of
dependent variables independent and
N
Time step control
Proceed to next time step
Y
N
IN
N
Y
Inner iteration
Outer iteration
Time step halved
43

Figure 2:
ATRIUM10 test case models the ATRIUM 10 XM/STS 94.1 bundle (AREVA NP GmbH
trademark) on a refined cell-by-cell level. The bundle is divided radially in 117 subchannels and
axi
PWR MSLB test case simulates a Mean Steam Line Break transient in a PWR core. This is a
full
6280 computational cells, or 6280×6280 matrix to be solved. The
D
Solirect ution?
Gaussian elimination
Y
δP converged?
Krylov?
SPARSKIT2 via bridge subroutine
Perform one iteration step in Gauss-Seidel
“alternative” solver
Original F-COBRA-TF solver
Link to the SPARSKIT2 library
F-COBRA-TF/SPARSKIT2 coupling scheme
TM
ally in 80 nodes, which results in total 9360 computational cells, or 9630×9630 matrix to be
solved. Since the water channel and part length rods are also modeled, the cross-sectional area of a
given cell could vary. The simulations are performed at steady state conditions reached after four
seconds real time simulations.
core model on a course FA-by-FA level, or each fuel assembly is represented by one thermo-
hydraulic subchannel. The model includes 157 fuel assemblies (subchannels), each divided into 40
axial nodes that result in total
44

sim
l, while the rest of the
cor
PELCO-S 4x4 test case models 4x4 rod bundle at BWR conditions. The model includes 25
subchannels, each in 36 axial nodes, or in total 900 computational cells. This is a steady state
simulation for ten seconds.
ulation includes the first fifty seconds after the scram event. This period of the MSLB transient
is characterized with slow power increase (return-to-power), almost constant core mass flow rate,
and significant system pressure reduction.
TMI FA test case is a model of Three Mile Inland –I fuel assembly on cell-by-cell level. The
fuel assembly is divided radially in 268 subchannels and axially in 24 nodes, which results in total
6144 computational cells, or 6144 ×6144 matrix to be solved. This is a steady state simulation for
five seconds.
Cell-by-cell test case represents a PWR core (157 17×17 FA) in a 1/8th symmetry. The hottest
fuel assembly, located in the core center, is modeled on a cell-by-cell leve
e is modeled as a subchannel per fuel assembly. The model consists of 56 subchannels each
divided axially in 50 nodes, or in total of 2800 computational cells. A flow reduction transient was
simulated. The core inlet mass flow rate was reduced up to 50 % of its nominal level in fifteen
seconds, accomplished by a total core power decrease. For reasons discussed later, this test case
was repeated at steady state conditions.
FA-by-FA test case represents a PWR core (157 17×17 FA) in a 1/8th symmetry; 26 subchannels
on FA-by-FA level (one subchannel per fuel assembly). Each subchannel is divided axially in 50
nodes, or in total 1300 computational cells. Steady state condition is simulated for five seconds. For
reasons discussed later, this test case was also repeated for simulation of the flow reduction
transient as defined in the Cell-by-cell test case.
45

All cases were calculated using as a pressure matrix solver Gaussian elimination (direct
inversion), Gauss-Seidel iterative method, and Bi-Conjugate Gradient Stabilized method with
inc
ase and 7 % for both TMI-FA
and
icro-cell
reg
s. The same tendency was found but at lower
magnitude probably due to the smaller matrix size of this test case. This unstable behavior at flow
omplete LU factorization with dual truncation mechanism.
The results show that when applying direct inversion for the larger cases, the outer iteration
process takes between 85% (ATRIUMTM10) to 94 % (TMI-FA) of the total CPU time. The time
spent for the pressure matrix solution (inner iteration) is between 67 % (ATRIUMTM10) to 89 %
(TMI-FA) of the total CPU time. For the smaller cases, the inner iteration time decreases with the
reduction of the pressure matrix size. For the PELCO-S test case, which is the smallest case, only
8% of the total time is due to the solution of the pressure equations system.
The inner iteration time (as a percentage of the total CPU time) sharply decreases, when the
Gauss-Seidel iterative technique is used: to 8 % for ATRIUMTM10 c
PWR MSLB cases. For the smaller cases this percentage varies between 2 and 4. However, this
significant speed-up is observed only when stationary conditions or transients not involving mass
flow rate variation (like MSLB) are simulated. For flow transients, as the cell-by-cell flow
reduction test case, the Gauss-Seidel solver converges slowly, leading to tremendous increase of the
CPU time. Actually, the cell-by-cell test case has an embedded mesh structure (detailed m
ion connected to lumped subchannels). Thus, to confirm that the lack of convergence is not due
to the mesh structure but due to the hydraulic boundary conditions, the following sensitivity studies
were performed. First, the cell-by-cell case was repeated at steady state conditions. The results
show about 25 times speed-up in the pressure matrix solution, which results in twice reduced total
CPU time comparing to the cell-by-cell flow reduction transient case. Second, the FA-by-FA test
case was repeated at the same flow transient condition
46

rate varying cond time (the
A-
au idel techniq r the larger CGSTAB solver greatly reduces the
the total CP e) - between 8 % for TMI-FA case and 12
ATRIUMT se. For th er cases th ge varies between 4 and 8. In regard
CPU , BCGSTA lver sometim erforms be ethod
om t (ATR TM
er paring to the Gaussian elim on, BCGST olver achieves 2.5 times
f the CPU time fo RIUMTM10 The speed- even higher for the PWR
case – 4 for case – 7.5 times.
ethod is its stable co ence at tran conditions.
ide accura
vis ation tool was used to inve e the accur f both Gau el and
solv he calculated thermal-hydr quantities compared to predictions
d with th lim d. nd tha
technique for all in ated test cas
ges with e
co ns (stationa d non-statio ) and the m ructure. Fo l cases,
re ma ze less than ×2000), the Gaussian elimination method is recommended
th steady rans ons. For larger m
d be of its com ve efficiency and better accuracy comparing to the Gauss-
Seidel technique. Results are summarized in Table 2.
itions is clearly observed in all cases for the so-called “null” transient
first 2 seconds), which is typical for the F-COBR TF simulations.
Like the G ss-Se ue, fo cases the B
inner iteration time (as a percentage of U tim
% for M10 ca e small is percenta
to the total time B so es p tter than Gauss-Seidel m
(PWR MSLB; ce A-byll-by-cell; F -FA cases), s etimes no IUM 10; TMI-FA; PELCO-S
cases). Howev , com inati AB s
reduction o total r AT case. up is
MSLB .5 times and the TMI-FA Other major advantage of the
BCGSTAB m nverg sient
Another impo that rtant issue must be cons red is the cy of an iterative solver. The
CoreView3D ualiz stigat acy o ss-Seid
BCGSTAB ers. T aulic were
obtaine e Gaussian e ination metho It was fou t Krylov solver shows better
accuracy comparing to the Gauss-Seidel iterative vestig es.
In summary, tive the new itera solver conver smoothly xcellent accuracy regardless of
the simulated nditio ry an nary esh st r smal
with pressu trix si (2000
for bo state and t ient simulati atrices, BCGSTAB solver is
recommende cause petiti
47

Table 2: F-COBRA-TF efficiency with different pressure matrix solvers AtriumTM10 bundle, steady state: 9360 cells; tend = 4 s
Solv time, s time, s time step, s time steps s er Inner iteration Outer iteration Time per Total number of Total real time,
Direct Inversion 2.52 3.24 3.79 6501 24657.5 Gauss-Seidel 0.11 0.82 1.37 6512 9080.3 BCGSTAB 0.17 0.91 1.47 6501 9489.9 PWR core, MSLB: 6280 cells; tend = 50 s
Solver Inner iteration time, s
Outer iteration time, s
Time per time step, s
Total number of time steps
Total real time, s
Direct Inversion 3.73 4.31 4.67 13888 65420.8 Gauss-Seidel 0.07 0.64 1.01 14078 14645.8 BCGSTAB 0.11 0.69 1.06 13892 14609.3 TMI FA, steady state: 6144 cells; tend = 5 s
Solver time, s time, s Time per time step, s
Total number of time steps
Total real time, s
Inner iteration Outer iteration
Direct Inversion 8.16 8.62 9.13 1405 13005.9 Gauss-Seidel 0.08 0.56 1.09 1411 1640.9 BCGSTAB 0.10 0.69 1.21 1405 1740.7 Cell-by-Cell, flow reduction: 2800 cells; tend = 15 s
Solver time, s time, s time step, s time steps s Inner iteration Outer iteration Time per Total number of Total real time,
Direct Inversion 0.18 0.38 0.52 4349 2274.9 Gauss-Seidel 0.30 0.50 0.64 9996 6302.6 BCGSTAB 0.03 0.23 0.37 4227 1577.4 Cell-by-Cell, steady-state: 2800 cells; tend = 15 s
Solver time, s time, s time step, s time steps s Inner iteration Outer iteration Time per Total number of Total real time,
Direct Inversion 0.18 0.38 0.51 4349 2269.2 Gauss-Seidel 0.012 0.21 0.34 5471 2120.2 BCGSTAB 0.018 0.22 0.35 5059 1813.4 FA-by-FA, steady state: 1300 cells; t = 5 s end
Solver Inner iteration time, s
Outer iteration time, s
Time per time step, s
Total number of time steps
Total real time, s
Direct Inversion 0.02 0.11 0.16 1701 275.3 Gauss-Seidel 0.003 0.094 0.14 1747 259.5 BCGSTAB 0.006 0.097 0.14 1702 250.7 FA-by-FA, flow reduction: 1300 cells; tend = 15 s
Solver Inner iteration Outer iteration Time per Total number of Total real time, time, s time, s time step, s time steps s
Direct Inversion 0.02 0.11 0.16 4120 653.7 Gauss-Seidel 0.036 0.13 0.17 4207 707.3 BCGSTAB 0.009 0.098 0.15 4120 604.8 PELCO-S 4x4: 900 cells; t = 10 s end
Solver Inner iteration Outer iteration Time per Total number of Total real time, time, s time, s time step, s time steps s
Direct Inversion 0.01 0.08 0.12 2053 254.1 Gauss-Seidel 0.002 0.07 0.11 2057 231.5 BCGSTAB 0.005 0.07 0.11 2053 238.9
48

3.3.3 F-COBRA-TF Models Improvements – Turbulent Mixing and Void Drift
he code spacer grid modeling.
T s been modified in-between the COBRA/TRAC
version and the FLECHT SEASET code version. In the later, the single-phase turbulent mixing has
been m
disto t ly at pre- and post-CHF
conditions. Thus, to preserve the mass balance and to improve and enhance code capability of
simulation of both single and two-phase turbulent mixing and net transverse mass, energy, and
momentum exchange between adjacent subchannels, the code turbulent mixing and void drift
models were revised and re-implemented. In addition, the Beus’ model for an enhanced two-phase
turbulent mixing (Beus, S.G., (1970) was implemented (Avramova, M. N., 2003b).
A detailed description of the current F-COBRA-TF turbulent mixing and void drift models is
given in Section 5.2, where the grid structures effect on both phenomena is discussed as well.
One of the most important phenomenon that must be accounted for in subchannel analyses is
the crossflow between adjacent subchannels, which leads to the transfer of mass, energy and
momentum. A proper crossflow modeling results in a correct prediction of the velocity, mass, and
heat distribution and subsequently to the correct safety margins evaluation. Moreover, the crossflow
effect is greatly influenced by the presence of obstructions inside the subchannel and thus it is
directly related to t
he COBRA-TF turbulent mixing model ha
odeled by means of the traditional inter-subchannel mixing coefficient approach and a
simple formulation of void drift phenomenon, typical for two-phase flow conditions, based on the
work of Lahey (Lahey, R. T. and Moody, F. J., 1993) and Kelly (Kelly, J. E. and Kazimi, M. S.,
1980) has been employed. In 1980s, both approaches were representing the state-of-the-art in
turbulent mixing and void drift modeling. Nowadays, they are still used in the most of the
subchannel codes. However, the way they have been implemented into COBRA-TF led to a
rtion of he mass balance and numerical instabilities, especial
49

3.3.4 F-COBRA-TF Validation and Verification Program
As a part of the F-COBRA-TF assessment for LWR analyses, an extensive validation and
verification program was established. The program consists of validation against phenomenological
tests (void distribution and critical power/heat flux experiments) and verification to standard (LWR
nominal operation and anticipated transients) and challenging (LWR core conditions characterized
by reverse flow at low inlet mass flux and strong transverse flow due to mid-span mixing grids)
cor
m
e applications.
3.3.4.1 F-COBRA-TF Validation Progra
BRA-TF validation program PSU was involved in the F-COBRA-
TF
esearch Center ISPRA
PELCO-S Sixteen-Rod Bundle Experiment (Herkenrath, H. et al., 1979). For both experiments
automatic procedures for input decks generation, tests point calculations, and results reporting were
created. The work was summarized by Glueck (Glueck, M., 2005a).
alyses
In the framework of the F-CO
simulations of two void distribution experiments – General Electric Nine-Rod Bundle
Experiment (Lahey, R. T. et al., 1970 and Janssen, E., 1971) and Joint R
3.3.4.2 F-COBRA-TF Verification Program for PWR An
mova, M. N., 2006). The related activities consist of two parts: code-
to-code comparative analyses and F-COBRA-TF core wide and hot subchannel predictions for
steady-state and anticipated transient conditions.
In the first part, a PWR core wide and hot channel analysis problem was modeled using F-
COBRA-TF and compared with COBRA 3-CP code, which is used at AREVA NP GmbH as a
An extensive verification program for PWR stand-alone applications was defined and
successfully completed (Avra
50

thermal-hydraulic subchannel analysis and core design code for PWRs.
In the second part of the code validatio BRA-TF stand-alone simulations of the
PWR core were performed tilized for comparisons of
ore-wide to hot subchannel analyses. The simulations were performed for both steady state and
tran
3.4 Concluding Remarks
prehensive modeling features, the thermal-hydraulic subchannel code COBRA-
TF is widely u aluations and design analyses.
program. To make the F-COBRA-TF code applicable for industrial applications, the
code programming, numerics, and basic models were improved.
The current version of F-COBRA-TF is consid
de
n program, F-CO
. Two COBRA-TF PWR core models were u
c
sient conditions. The analyzed transients were flow reduction (pump coast-down), power rise
(bank withdrawal at power), and pressure reduction (anticipated activation of pressurizer spray).
The code capability of predicting reverse flow situations was assessed in the performed
simulation of main steam line break accident.
Due to its com
sed for LWR safety margins ev
Under the name F-COBRA-TF and in the framework of a joint research project between PSU
and AREVA NP GmbH the code has undergone through an extensive validation/verification and
qualification
ered to be a good base for implementation of
new mo ling capabilities.
51

CHAPTER 4
F-COBRA TF SPACER GR
The spacer grid model of F-COBRA-TF is based on the spacer grid model of the COBRA-TF
FLECHT SEASET code version (Paik, C. Y. et al., 1985). D validation
pro
odels for inte al radiation,
spacer grid effects, and flow blockage heat transfer were added and validated.
4.1 COBRA/TRAC Spacer Grid M
1.1 P
), the local pressure losses in
vertical flow due to spacer grids, orifice plates, and other local obstructions are modeled as velocity
head losses:
- ID MODEL
uring the FLECHT SEASET
gram, the COBRA/TRAC code (Thurgood, M.J. et al., 1983) was modified to enhance the code
predictable capabilities for reflood transients. The m r-subchannel therm
odel
4. ressure Losses on Spacers
In the COBRA/TRAC code version (Thurgood, M.J. et al., 1983
cg2
wher
UP2
ρζ=∆ , (4.1)
e ζ denotes the pressure loss coefficient, ρ is the density, is the vertical flow velocity,
and is the gravitational conversion constant. The loss coefficients along with the locations of the
local losses due to spacers are user-specified values. The loss coefficients have to be defined
ssuming
U
cg
a positive upflow in the subchannel and to be specified for the momentum (not continuity)
cell that contains the spacer.
52

As it was discussed in Section 3.1 the code semi-im
(in a matrix form it corresponds to Eq. (3.10):
- continuous liquid flow rate;
plicit momentum equations have the form
vapliqliq mdmcPbam &&& 1111 ++∆+=
entvapliqvap memdmcPbam &&&& 22222 +++∆+= - vapor flow rate;
entvapentr memdPbam &&& 3333 ++∆+= - entrained liquid flow rate.
In the above equations, the pressure losses due to local obstructions are accounted for by the
coefficient for the liquid phase and the coefficient for the vapor phase: 1c 2d
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛∆−
∆−
∆∆
= −− xf
xfxtc1
axialliqwall
liqliq
axialvapliq
ρα , (4.2)
where vapliqf − is the vertical interfacial drag coefficient between the vapor and the continuous
liquid and axialliqwallf − is the vertical liquid-wall drag coefficient:
axial
⎟⎠
− xf vapwallap
, (4.3) ⎟⎞
⎜⎜⎝
⎛∆−
∆−∆−
∆∆
= −− xfxfxtd axial
vvap
axialvapent
axialvapliq
ρα)(
2
vapentf −
and is the vertical vapor-wall drag coefficient.
-wall drag coefficient ( ) and the vertical vapor-wall drag coefficient
) are defined as a sum of the form pressure losses (due to spacer grids, orifice plates, etc.)
and the rod frictional pressure losses:
where ial is the vertical interfacial drag coefficient between the vapor and the entrained liquid
axial
ax
vapwallf −
The vertical liquid axialliqwallf −
( axialvapwallf −
53

liqfrictionrodliqaxial jiUjiif ),(),()( ζliqwall x ,_
liqform ,
ζ
ζ
and
+= (∆−
44 344 214.4)
vapfrictionrodvapaxial
vapwall
vapform
jiUx
ji,_
),(if
,
),()( ζζ
ζ
∆−44 344 21
),( jiU liq ),( jiU vap
+= (4.5)
In Equations (4.4) and (4.5), and are, respectively, the vertical liquid velocity
and vertical vapor velocity in the co putationa ; m l cell ),( ji ),( jiζ is the spacer grid pressure loss
coefficient as specified by the user; indices and i j stand for the subchannel and axial node
numbers.
4.1.2 De-Entrainment on Spacers
The COBRA/TRAC code employs a simple model for de-entrainment on the spacer grids. The
ssu pingemodel a mes that any droplets that are in the path of the spacer grid im on its surface and
de-entrain. Thus, the de-entrainment rate is given as
AUm ρα15.0=& , (4.6) entrliqentDE
where ent is the entrained liquid volume fraction; α liqρ it the liquid density; is the vertical
velocity of the entrained liquid field; and
entU
A is the spacer area seen by the droplets.
Once a liquid film is established on the grid, it is assumed that the same amount of liquid is re-
entrained: DEE mm && =
54

4.2 COBRA-TF_FLECHT SEASET Spacer Grid Model
Section 4.1 described the spacer grid modeling in the COBRA/TRAC code version. Later,
during the code assessment against the FLECHT
been introduced (Paik, C. Y. et al., 1985) including a grid heat transfer model for convective
enhancement downstream of the spacers, a model for the grid rewet during bottom reflood phase of
LOCA, and a model for the droplet breakup on spacers. A capability of internal code evaluation of
r geometry has been implemented as well.
4.2.1 Evaluation of the Spacer Loss Coefficients
es for the spacer loss coefficients,
they are calculated from the grid dimensions as follows:
SEASET experiments, several modification have
the spacer loss coefficients based on the space
In this code version, rather than using input-specified valu
( )2333.0 )Re196,20min( spingsblocked
spacerblockedlossgrid AAf
mix+= −ζ (4.7)
where is the pressure loss coefficient multiplier (input parameter); is the fraction of
channel flow area blocked by the grid (input parameter);
blocked by the grid springs (input parameter); is the droplets-bubbles mixture Reynolds
number.
The Reynolds number of the droplets-bubbles mixture is calculated as
lossf spacerblockedA
spingsblockedA is the fraction of channel flow area
mixRe
mix
hmassmix
DGµ
=Re ; (4.8)
where the total mass flux is given as massG
55

( )
( )
( )2
),(),(2
)1,(),(),(
),(),(2
)1,(),(),(
),(),(
+
+++
++=
=++
jijim
jijijiA
jijim
jijijiA
jijimGG
mom
vapvapmom
vapvap
liqliqmom
liqliq
entrvapliq
α
ααα
ααα
&
&
&
(4.9)
)
)1,(),(),( ++ jijijiA entent
entent
αα
If the phase k has a negative velocity then (
= GGmass
)1,(),(5.0),( ++×)1,(),( +
=jijijiA
Gkkmom
kkk αα
jijim α&.
The dynamic viscosity of the droplets-bubbles mixture is given as the minimum of the droplets
dynamic viscosity and the bubbles dynamic viscosity:
( )bubblesdropletsmix µµµ ,min= , (4.10)
where
( )⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
+
+−
⎟⎟⎠
⎞⎜⎜⎝
⎛ ++−=
liqvap
liqvap
jiji vapvapliqbubbµ les
µµ
µµ
ααµ
)4.0(5.2
2)1,(),(
1 (4.11)
( )⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
+
+−
⎟⎟⎠
⎞⎜⎜⎝ 2
If the Reynolds number of the droplets-bubbles mixture is
⎛ ++−=
liqvap
liqvap
jiji vapvapvapdroplets
µµ
µµ
ααµµ
)4.0(5.2
)1,(),(1 (4.12)
greater than then 410
( )216.0 )Re41,5.6max( spingsblocked
spacerblockedlossgrid AAf
mix+= −ζ (4.13)
The pressure loss coefficients due to other local blockages (obstructions) are calculated in a
56

similar manner:
( ) ( )2333.0Re196,20min blockageblockageblockage Af−=ζ if 4101Re ×≤mix (4.14)
and
mix
( ) ( )216.0Re41,5.6max blockageblockageblockage Afmix
−=ζ if (4.15)
where is the pressure loss c
the blockage area ratio (input parameter); and Equations (4.8) through (4.12) are used to calculate
the Reynolds number and the dynamic viscosity of the droplets-bubbles mixture.
wall drag coefficient ( ) and the vertical vapor-wall drag coefficient ( ), are modified
1
4101Re ×>mix
blockagef oefficient multiplier for blockages (input parameter); blockageA is
In comparison to the COBRA/TRAC version (Equations (4.4) and (4.6)), the vertical liquid-
axialliqwallf −
axialvapwallf −
as follows :
( )liqfrictionrodliq
blockagegridaxial ibigif
()(5.0)(liqwall
liqm
jiUx ,_
,
),()
ζζζ
forζ
+∆−
444444 3444444 21 (4.16)
+=
and
( )vapfrictionrodvap
blockagegridaxialvapwall
vapform
jiUx
ibigif ,_
,
),()()(
5.0)( ζζζ
ζ
+∆
+=−
(4.17)
In Equations (4.16) and (4.17), the term )(iggrid
444444 3444444 21
ζ is the grid loss coefficient as calculated by the
code using the grid geometry input data for the grid index )(ig ; and )(ibblockageζ is the loss
coefficient due to blockage )(ib as specified by the user.
1 The COBRA/TRAC model is available in the code as an input option and the user can choose between
COBRA/TRAC and COBRA-TF_FLECHT SEASET modeling of the spacer grid pressure losses.
57

4.2.2 Single-Phase Vapor Convective Enhancement
The single-phase vapor heat transfer augmentation downstream of spacers for Reynolds number
higher than 104 has been modeled by a correlation for the local Nusselt numbers (Yao, S. C. et al.,
1982):
)/(13.02
0
x 55.51NuNu Dxe−+= ε , (4.18)
where is the local Nusselt number with presence of spacers; is the local Nusselt number
without spacers;
xNu 0Nu
ε is the blockage ratio of spacers to flow channel; is the flow channel D
xhydraulic diameter; and is the axial distan
The correlation has been developed for egg-crate grids and blockage ratios between 0.256 and
0.346. The implementation has been validated against FLEACH SEASET 21-bundle tests with
steam cooling (Loftus, M. J. et al., 1982).
4.2.3 Grid Rewet Model
During the dispersed flow stage of a bottom reflood the spacer grids are responsible for
significant cooling of the vapor passing through them. To account for that effect, a grid rewet model
has been implemented into COBRA-TF. The spacers have no internal heat generation and do not
store significant amount of energy. Thus, when droplets impinge on the spacer grid, they will cool it
down and form a liquid film on its surface. To determine the fraction of grid that is covered by such
a li
in Figure 3, upstream of the grid quench front both, grid and
liquid film are at saturation temperature. In the dry region, the grid temperature is close to the rod
rface temperature.
ce from the downstream end of the spacer.
quid film, a two-region grid quench model has been implemented. The regions are separated by
the quench front location. As shown
su
58

During the reflood transient, the dry grid temperature is between the vapor temperature and
heater rods temperature. The transient temperature response of the dry region is determined by a
heat balance between radiation, convection and droplet contact heat transfer:
p
dchtconvradcgriddry
grid qqqAPT )()( '''' −−=
∂,
Ct ρ
''
∂ (4.19)
where is the dry grid temperature; is t
grid cross-sectional area,
drygridT gridP he perimeter of the grid strap; cA is a half of the
2g
c
PA
δ= ; δ is the grid half thickness; is the radiation heat flux
from rods and vapor; is the convective heat flux; and
contact.
The radiation heat flux
''radq
''convq ''
dchtq is the heat flux due to droplet
Figure 3: Two-region grid quench and rewet model
from the rods and vapor to the grid is calculated utilizing the radiation
heat flux network shown in Figure 4:
gridgrid
grig4
griddryrad
TBq
εεσ)1(
''_ −
−= (4.20)
droplet flow liquid film
quench front TT, deg
TSAT
DRY
x
59

The black body radiosity of the grid spacer, gridB , is calculated as
( ) rodvapvapvaprodrodrod ⎠⎝ )1(
rodrodgrid BTBB +−⎟⎟
⎞⎜⎜ −+
−= −14 1)( εεσ
εε (4.21)
and the black body radiosity of the rod, , is calculated as
TB⎛ − 4σ
rodB
4
444
CTTCTC
B vapvapgridrod
σσ=
Cgridrodrodσ ++ (4.22)
Figure 4: Radiation heat flux network
In Equations (4.21) and (4.22) is the rod surface temperature, [ºR]; is the grid
temperature in the dry region, [ºR]; is the vapor temperature, [ºR]
rodT gridT
vapT ; σ is the Stefan-Boltzman
constant, 8101714.0 −×=σ [Btu/hr-ft2-ºR]; rodε is the rod emissivity ( 9.0=rodε ); gridε is the grid
emissivity ( 9.0=gridε ); and vapε is the vapor emissivity. The vapor emissivity is calculated as
(4.23) Mvap LPAvap e−−= 0.1ε
VAPOR
ROD GRID 4
gridTσ
4vapTσ
gridBrodB 4
rodTσ
60

where vapA is the mean absorption coefficient f ater vapor, [psi-ft]or w ]; a
, [ft]:
-1; P is the pressure, [psi nd
ML is the mean beam length diameter hydraulic channel9.0 ×=ML .
In E
vap eA = , where is the vapor temperature, [ºK].
The coefficients , and are defined as follows
quation (4.23) the mean absorption coefficient for water vapor is given by
])10444073925.010960962004.2(344523221.0[ 63 TT−− ×−×−−146.2 vapvapvapT
rodC , gridC , vapC 4C
vaprod
rodrod AC
εε1
= ε )1( −
211)
⎟⎟⎞
⎜⎜⎛od
)1(1(
⎠⎝−−
=vapvaprod
rgridC
εεεε
)1(11
)1(111
vapgrid
grid
vapvaprod
rodvap AC
εε
ε
εεεε
−+⎟
⎟⎠
⎞⎜⎜⎝
⎛ −
−⎟⎟⎠
⎞⎜⎜⎝
⎛ −=
⎟⎟⎠
⎞⎜⎜⎝
⎛ −+
−+⎟
⎟⎠
⎞⎜⎜⎝
⎛ −+
−−
−=
rod
rod
vapvapgrid
grid
rod
rod
vapvaprod
rod AACεε
εεε
ε
εε
εεεε )1(1
)1(1)1()1(
)1(11)1(
4
where
⎟⎟
⎜⎜
−++
−=
)1(111
)1(1 gridA
εεεεε.
The
⎠
⎞
⎝
⎛− )1(
vapvapgridvapvap
ε
convection from the dry region of the grid spacer to the vapor is calculated using the heat
transfer coefficient for convection from the rod to the vapor:
e he
) (4.24) (''vap
drygridconv TThq −=
where is the heat transfer from the dry grid region, [Btu/hr-ft''convq 2]; h is th at transfer
61

coefficient from rod to vapor, [Btu/hr-ft2-ºF]; drygridT is the temperature of the dry region, [ºF]; is
the
urface
caused by the lateral turbulence migration of droplets:
, (4.25)
where is the lateral deposition rate
vapT
vapor temperature, [ºF].
The droplet contact heat transfer results from the deposition of droplets on the dry grid s
ηfgDEdcht hmq &=''
DEm& ; η is the fraction of droplets evaporated .
The lateral deposition rate is calculated as
(
where the deposition coefficient is calculated as
])/(1[ 2sat
drygrid TTe −=η
Ckm DDE =& 4.26)
Dk
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛=
vap
vap
liqh
vapD
GfD
kρσρ
µ 2/12/1
2102.0 (
In − factor; is the
droplet concentration,
4.27)
Equation (4.27) vapG is the vapor mass flux; Re079.0=f is the friction 25.0 C
vap
D ; and DG is the droplet mass flux. vap GGρ=C
The wet region heat balance is calculated in a similar way. The grid quenching is promoted by
the impinging droplets. That will increase the liquid film on the grid surface. All the droplets
flowing within the projected area of the grid are assumed to be captured:
Eflow
gridDE m
AA
m && = , (4.28)
is the liquid deposition rate; is the entrained liquid flow rate; is the grid where DEm& Em& gridA
62

projected area; and
The radiatio the rod to the wet grid region is calculated by using saturation
temperate ivity is equivalent to the spacer grid emissivity:
flowA is the channel flow area.
n heat flux from
and assuming that the liquid emiss
gridgrid
satwetgridwetrad
Tσ 4−Bq
εε )1(_''
_ −= , (4.29)
b gion:
where
wetgridB _ is the black ody radiosity of the wet grid re
wetgridrodB _) −+ vapvap
vapwetgridrod
rodrod
satwetgridrodwetgrid
TBTBB
4_
4_
_ 1(1
)1(−−
−⎟⎟⎠
⎞⎜⎜⎝
⎛ −+
−
−=
εεσ
εεσ
is the black body radiosity of the rod for the wet grid region:
(4.30)
wetgridrodB _−
⎟⎟⎞
⎜⎜⎛ ++
=− _
TTCTCB vapgridgridsatrod
wetgridrod
σσσ.
⎠⎝ 4
444
CCvap
The interfacial heat transfer between the vapor and the liquid film
(4.31)
is given as:
, (4.32)
where the heat transfer coefficient is calculated using the fluid properties at the top of the continuity
cell (center of the momentum cell).
However, if the droplet deposition rate is less than the evaporation rate (due to the radiation and
interfacial heat transfer) the grid quench front will not advance:
,
where
)(''satvapconvfilmvap TThq −=−
EVAPDE mm && >
63

EVAPm& is the liquid evaporation rate: fg
gridqgridfilmvapwetrad
hLfPqq )( ''''
_ −+=EVAPm& ;
is the fraction of grid quenched;
and are, respectively, the grid length and the grid perimeter.
Advancement rate is limited by the quench front velocity and the availability of water. The
Yamanouchi model (Yamanouchi, A., 1968) for quenching thin plate by a liquid film is utilized in
the code. Quench velocity can be expressed as follows:
qf
gridL gridP
QV
12/122/1−⎫⎤⎡ dry
_ 121 ⎪⎬
⎪⎨
⎧⎥⎢ −⎟
⎟⎞
⎜⎜⎛ −+⎟
⎟⎞
⎜⎜⎛
= wetgridgridpgridQ
TTCV δρ
; (4.33) 2 ⎪⎭⎪⎩
⎥⎦
⎢⎣ ⎠⎝ −⎠⎝ satwetgridwet TTkh
where gridρ is the density of the grid material; is the specific heat of the grid ma is
dry
gridpC _ terial;
the thermal conductivity of the grid material; is the dry grid temperature; is the wet region
heat transfer coefficient; s the rewet tem
gridk
gridT weth
wetT i perature; and δ is the grid half thickness.
The heat flux has its maximum at the quench front location. It is physically reasonable to
assume that . Thus, the wet region heat transfer coefficient is equal to ''''max CHFqq ≡
satwetsatwetwet TTTT −−
CHFqqh ==''''
max . (4.34)
The Zuber pool boiling critical heat flux correlation is used to determine q . The rewet
temperature is set to 260 ºC (500 ºF) as recommended by Yamanouchi (Yamanouchi, A.,
196
''CHF
wetT
8).
64

The quench front velocity is also constraine
radiation and interfacial heat transfer. The flow rate of remaining water is given as
d by the water remaining after evaporation by
⎟⎟⎠
⎞⎜⎜⎝⎠⎝ flowA⎛ +
−⎟⎟⎞
⎜⎜⎛
=−= −
fg
gridqgridfilmvapwetradE
gridEVAPDER h
LfPqqm
Ammm
)( ''''_&&&& . (4.35)
In reality, only a fraction of the remaining water can be evaporated, since some water will be
blow off the grid by sputtering. Thus, the water fraction available for evaporation at the quench
front is
2
⎦
⎤
⎣
⎡⎟
⎠
⎞⎜
⎝
⎛
= sat
drygridT
RQF emm && . (4.36)
Using the stored energy balance and having in mind that the stored energy removed at the
quench front cannot exceed the product of water fraction available for evaporation, m& , and the
1⎥⎥
⎢⎢
⎟⎜− T
latent heat , the following expression is obtained
. (4.37)
The quench velocity is estimated as
QF
, fgh
)()( satdry
gridQgridpfgQF TTVAChm −≥ ρ&
)()( satdry
gridgridp
fgQFQ TTAC
hmV
−≤
ρ&
, (4.38)
and the wet region heat transfer coefficient is limited by
⎥⎥
⎦
⎤
⎢⎣
⎟⎠
⎜⎝ −⎟
⎠) satdry
gridsat TTT⎢⎡
−⎟⎞
⎜⎛ −⎟
⎞⎜⎜⎝
⎛
−⎟⎟⎠
⎞⎜⎜⎝
⎛≤ 12
(4
22
wetdry
griddry
gridgrid
fgQF
gridwet
TTTP
hmk
hδ
δ & . (4.39)
e grid will begin to dryout. The grid dryout velocity
Quench front regression occurs when the film evaporation rate exceeds the liquid deposition
rate. At this point th is defined as
65

)( dryfgEVAP
TT −. (4.40)
)()(
satgridgridp
DEdryout AC
hmmV
−=
ρ&&
mpared to the droplet
diameter. This results in a “slicing” of the impinging droplet in one or two large droplets and
several microdroplets. These microdroplets are preferentially evaporated downstream of the grid
incident droplet is treated by a separate small drop field. The increase of interfacial area due to the
large d e fraction of the
cident droplet that is shat to
Figure 5: Droplet breakup
tion of the entrainment liquid flow rate and the
grid blockage area:
4.2.4 Droplet Breakup Model
The COBRA-TF droplet breakup model accounts for the breakup that can occur when droplet
impinges on a spacer (Figure 5). The grid strap is relatively thinner co
leading to an enhanced heat transfer (vapor superheat is reduced). The shattered fraction of the
roplet fragment is assumed negligible. The new field is characterized by th
in tered in microdroplets and the initial diameter of the new distribution.
The mass flow rate of the microdroplets is a func
microdroplets
grid strip
66

Eflow
grid
AA ⎟
⎠
⎞⎜⎝
⎛
where E
EDB mm && ⎟⎜=η , (4.41)
η is the grid efficiency factor, equal to the portion of droplet within the grid projected area
that is shattered into ion of microdroplets. A suggested value is 6.0 a populat =Eη . The
microdroplets are incide gnt upon the next rid spacer. They are assumed to breakup with the same
grid efficiency. Then, the mass flow rate of the new microdroplets becomes
)( SDEflow
EDB A ⎟⎠
⎜⎝
where m& is the mass flow rate of small droplets immediately upstream of the grid.
The ratio of shattered to incident droplet diam
grid mmA
m &&& +⎟⎞
⎜⎛
=η , (4.42)
eters is determined as
SD
530 We167.6 DID= (4..SDD 43)
and the Weber number is given by σ
ρ IDIliq DV 2
We = , (4.44)
where DIV is the impacting droplets velocity normal to the surface and ID is the diameter of
impacting droplets.
At lo
D
w Weber number of the impact droplet, the shattered droplet diameter is predicted in the
same as large shattered
droplets in the small droplet field, they are shifted to the entrained liquid field. To accomplish this,
the interfacial area created by droplet breakup, when , is added as a source term to the
order the incident droplet diameter. Then, rather than considering these
150We ≤D
interfacial area conservation equation.
67

For Weber number of the impact droplet greater than 250, the shattered drops are added to the
small drop field in the normal manner. At intermediate values, a linear ramp as a function of DWe
is used for transition between the two different treatments. Thus, the mass source term for small
drop field is given by SDSD mm && ξ= and the mass source associated with large drop interfacial area
source term is given by SDSD mm && )1( ξ−= ,
where 150250 −
=ξ . 150We − (4.45)
lets
in the sm d
These drople are merged, preserving the
droplet m
4.3 Improvements of the COBRA-TF Spacer Grid Model Performed at PSU
The COB t PSU to improve the entrainment and
deposition
2003) and sp ispersed flow film boiling
(DF
The PhD thesis of Ratnayake (Ratnayake, R. K., 2003) aimed to develop and implement into
COBRA-TF a mechanistic spacer grid model capable of accurate evaluation of entrainment and de-
ent
The mass source and the initial droplet diameter are calculated at every grid location. Drop
all rop field are present just upstream of the grid, in addition to the entrained liquid field.
ts can be also broken and the two droplet populations
ass, interfacial area, and momentum.
RA-TF spacer grid models have been modified a
modeling of liquid film with applications to BWR fuel rod dryout (Ratnayake, R. K.,
acer effects on the droplets-vapor cooling typical for the d
FB) regime during blowdown and reflood phases of PWR loss of coolant accidents (Ergun, S.,
2005b).
4.3.1 Modeling of the Spacer Effects on Entrainment and Deposition
rainment caused by spacer grids in BWR bundles, and thus to improve the code predictions of
68

the dryout phenomenon.
It was discussed in Section 4.2.1 that COBRA-TF employs a simple model for de-entrainment
on the grid spacers and this is the only such related spacer grid model. The code does not feature
any models for the spacer-caused entrainment or downstream deposition effects. Moreover,
COBRA-TF critical power analyses (Frepoli, C. et al., 2001a) have indicated that in order to match
rimental data the code film inm icantly increased. In other
wo
pture the turbulent enhancement effect of spacer
the qualitative behavior of entrainment at spacer
er grid location, the second calculated the amount of
liquid removal from the film by mechanical interventions of the spacer grids. Both entrainment
models have been developed using mechanistic approaches.
t in the grid
the expe entra ent rate has to be signif
rds, the current code model miss-predicts the critical power.
The Ratnayake’s objectives were to develop new model that satisfies the following criteria:
The model should be able to calculate the individual effects of entrainment and
deposition exclusively for a given spacer grid geometry;
The deposition model should ca
grids;
The model should be able to explain
grids and the downstream deposition behavior;
The overall model should be able to capture the geometrical variations between
different grid designs, but should not be design-dependent.
Regarding entrainment phenomenon two sub-models have been developed - acceleration
entrainment model and geometrical entrainment model. While the first calculates the entrainment
due to vapor flow acceleration at the spac
In the acceleration entrainment model, to estimate the increased film entrainmen
69

sectio J. et al.,
198
n, the normal film entrainment calculated for the non-grid section (Thurgood, M.
3) has been modified by recalculating the vector vapor velocity using blockage parameters:
⎥⎦
⎤
⎢⎣
⎡
−⎦
⎤
⎣
⎡
blockage
IVIS
FUk
0.11
2
4444 34444 21σ
µτ
where
⎥⎢⋅∆⎥⎢= gridWu PS )(
section grid-non
,
)0.1(, blockagegridVV FUU −⋅= and grid∆ is the axial grid length.
The geometrical entrainment is caused by a mechanism related to the wet/dry patch formation at
the grid-rod contact location. Thus, the geometrical entrainment model has been based on the
horseshoe vortex theory involving parameters such the bluff body width, the radius of curvature at
the
atch boundary.
TF de
Th loped from a fundamental approach of modeling the
turb ao and Hochreiter’
cor
embed
blockage parameter is routed via a user interface as a two-dimensional parameter indexed for an
app
The new spacer grid model has been validated against Siemens 9x9 rod bundle data. The
improved code version predicts dryout reasonably well, however, the dryout locations calculated by
the new code are at lower elevation comparing to the experimentally determined ones.
sides of the wet patch boundary, the distance between the leading edge of the bluff body, and
the straight portion of the wet p
Both, acceleration and geometrical entrainment models have been incorporated into COBRA-
pending on user-specified input parameters.
e new deposition model has been deve
ulence generated by spacer grids. The model is a modification of the Y
relation for the heat transfer augmentation downstream of spacer grids (Yao, S. C. et al.,1982) by
ding a blockage parameter that adequately represents the grid generation of turbulence. The
ropriate subchannel and node numbers.
70

4.3.2 Modeling of the Spacer Effects in Dispersed Flow Film Boiling Regime
In her PhD study “Modeling of dispersed Flow Film Boiling and Spacer Grid Effects on Heat
Transfer with Two-Flow, Five-Filed Eulerian-Eulerian Approach”, Ergun has added a small
dro t s conservation equations of COBRA-TF. The effect of the smaller and thus
thermally more effective droplets on the heat, mass, and momentum transfer during dispersed film
flow boiling has been modeled. However, at
via s: firs
sma wet spacer grids provide a large interfacial area for heat transfer
between the superheated vapor and the liquid film deposed on its surface.
As summarized by Ergun, there are several drawbacks in the COBRA-TF spacer grid models
for dispersed drop film flow:
In the calculation of the interfacial heat transfer area between liquid film on the grid and
vapor, the amount of the vapor mass generated at saturation temperature and momentum
transferred are not taken into account;
The initial grid temperature is estimated as high as the rod temperature;
m the liquid film is
estimated as well.
ple field to the mas
DFFB conditions spacer grids play an important role
two effect t, the breakup of large droplets on spacer grids generates significant source of
ll droplets and second, the
In the grid quench modeling, the amount of liquid mass deposed on the grid surface and the
mass loss from deposited liquid due to evaporation and/or entrainment are not taken into
account.
As a result, comparisons to experimental data (Rosal, E. R. et al., 2003) show that the code
overpredicts the grid temperature and thus a higher large drop breakup is estimated because the
quenched grid droplet breakup is not simulated. A smaller vapor generation fro
71

To improve the modeling of the spacer grid effects, logic has been added for solution of mass
and momentum equations for the liquid film on the spacer grid. At each time step the following
equations are solved:
Mass equation:
EgridDEgridgrid SSt
−+Γ−=∆
)(, where grid
nSGMSGM −Γ is the evaporation of the liquid film on
the grid; is the de-entrainment rate on the grid; and is the entrainment rate fromDEgridS EgridS
the liquid film on the grid.
Momentum equation:
x
xKAUSGMom vgridliflowvap
nvapliq
nn
xKAU
t
SGMom gridgridliqgrid
USUSx
U ngridEgrid
nentrDEgrid
ngridgrid
∆
−+
Γ−
)(
grid
∆
∆+
−
,, ρ
, where is the
velocity of the liquid film on the grid; and are, respectively, velocities of the vapor
een the liquid film and the grid
surface;
liquid f n bove equations index e
step a
The v trainment calculated for the spacer grids are
cou
de version shows better agreement with the experimental data; however, Ergun
∆−=
∆
)( ρ
U
vapU entrU
and entrainment fields; liqgridK , is the wall grad coefficient betw
gridA is the grid projected area; ; flowA is the subchannel flow area; vgridliK , is the vapor-
ilm interfacial drag coefficient. I the a n stands for the new tim
v lues.
e aporation rate, entrainment, and de-en
pled with the code’s solution scheme as source or loss terms for the mass, momentum and
energy equations as long as the heat transfer regime is a hot wall flow regime.
The modified co
72

has recommended further improvement of the heat transfer package regarding spacer grid effects. In
particular, the minimum film boiling temperature for spacers and the heat transfer coefficients used
to determine the quench velocity have to be revised as well as the spacer grid rewet model.
Model – Features and Drawbacks
The theoretical basis of the current F-COBRA-TF spacer grid model is identical to the one
presented in Section 4.2. The improvements described in Section 4.3 are not implemented in F-
COBRA-TF code.
In summary, F-COBRA-TF 1.03 includes models for:
Local pressure losses in vertical flow due to spacer grids;
De-entrainment on the spacers grid;
Single-phase vapor convective enhancement downstream of the spacers grids;
Grid rewet under dispersed flow conditions;
Droplet breakup model.
F-COBRA-TF 1.03 is not equipped with adequate models for
Spacers’ effects on the mass, heat, and momentum exchange mechanisms such as
turbulent mixing and void drift;
Lateral flow patterns created by specific configurations of the vanes;
Swirl flow created by the mixing vanes.
Moreover, studies on the currently available models (Avramova, M. N., 2005b) indicated several
inconsistencies between the theoretical models as described by Paik (Paik, C. Y. et al., 1985) and
the actual coding.
4.4 Current F-COBRA-TF 1.03 Spacer Grid
73

4.5 Concluding Remarks
In order to enable the F-COBRA-TF al applications including LWR safety
margins evaluations and
effects have to be revised and substantially improved.
code for industri
design analyses, the code modeling capabilities related to the spacer grid
74

CHAPTER 5
MODELING OF SPACER GRID EFFECTS ON THE TURBULENT MIXING IN ROD
One of the most important phenomenon that must be accounted for by the rod bundles thermal-
hydraulic an
The presence of obstructions, such as spacer grids, in the flow channels has a significant effect
BUNDLES
5.1 Background
alyses is the crossflow of mass, energy and momentum between adjacent subchannels.
At an equilibrium flow conditions there are no lateral pressure differences between subchannels
leading to a crossflow and the flow rates of both liquid and vapor in each subchannel do not vary in
the axial direction. At non-equilibrium conditions, flow re-distributions occur along the channel
axis and the flow tends to approach equilibrium. The single-phase crossflow can be attributed to
two effects - turbulent mixing and diversion crossflow. At single-phase isothermal conditions,
turbulent mixing is an inter-subchannel mixing due to turbulence of the fluids, which may cause
momentum transfer between the subchannels but no net mass and energy transfer. Diversion
crossflow is a crossflow due to lateral pressure gradients, which may be introduced by differences
in the subchannel geometry. At two-phase flow conditions one additional effect, void drift, plays a
role in the exchange processes. Void drift is a crossflow driven by the two-phase flow tendency to
approach an equilibrium condition. The void drift results in a net transfer of liquid and vapor from
one subchannel to another. Known also as vapor diffusion, the void drift has been postulated in
order to describe experimental observations which could not be explained with the gradient-
diffusion concept for the turbulent mixing.
75

on all the three mechanisms: turbulent mixing, diversion crossflow, and void drift. In addition,
spe
ng rates are
obs
nular transition. Regarding geometry effects, Kuldip and Pierre
(Kuldip, S. and Pierre, C. C. St., 1973) reported an increase in the mixing rate for wider gap
cific spacer structures may create a strong net transfer between adjacent subchannels due to
velocity deflection on their surfaces. This lateral transfer is known as a directed crossflow.
Because of its high importance for the nuclear reactor safety performance and power efficiency,
the single- and two-phase mass, energy and momentum exchange has been investigated for
decades, however, with a questionable success.
A lot of experiments have been performed to study the turbulent mixing in fuel rod bundles and
several correlations for the mixing rate have been proposed. Examples are the work by Rowe and
Angle (Rowe, D. S. and Angle, C. W., 1967); Rogers and Rosehart (Rogers, J. T. and Rosehart, R.
G., 1972); Rogers and Tahir (Rogers, J. T. and Tahir, A. E. E., 1975); Gonzalez-Santalo and
Griffith (Gonzalez-Santalo, J. M. and Griffith, P., 1972); Rudzinski et al. (Rudzinski, K. F. et al.,
1972): Kuldip and Pierre (Kuldip, S. and Pierre, C. C. St., 1973); Beus (Beus, S. G., 1970);
Yadigaroglu and Maganas (Yadigaroglu, G. and Maganas, A., 1994); and Wang and Cao (Wang, J.
and Cao, L.). Except the last two, these experiments have been carried out using an air-water
mixture as a working fluid. The points of interest were the dependence of the mixing rate on the
fluid conditions (mass flux, quality, etc.) and on the geometry (square or triangular array, gap
width, etc.). It was found that mixing rates are both flow regime and geometry dependent.
Rudzinski et al. (Rudzinski, K. F., et al., 1972) reported that for an increased mass flux there is a
decrease in the mixing Stanton number and the quality region over which higher mixi
erved. In an agreement with Rowe and Angle (Rowe, D. S. and Angle, C. W., 1967), Beus (Beus,
S. G., 1970), and Kuldip and Pierre (Kuldip, S. and Pierre, C. C. St., 1973), the maximum of the
mixing rate was found near slug-an
76

spaci
eriments have be
resence of spacer grids.
However, Lahey and Moody (Lahey, R. T. and Moody, F. J., 1993) refer to the Rowe and Angle
data (Rowe, D. S. and Angle, C. W., 1969) showing graphs for the mixing parameter dependence on
the steam quality at different mass flu
change not only the amount of the turbulent mixing but also its distribution over the axial length.
Lahey et al. ( ) proposed a simple approach for modeling of the eddy diffusivity
enchantment downstream of the spacers. Most current
discussed a strategy for improving the crossflow models in the subchannel code NASCA including
a n nt model that includes localized geometrical effects.
The following sections will discuss the effect of the spacer grid
bundles and the modeling of turbulent mixing in the subchannel analysis codes, particularly in the
ng.
However, most of the above listed experimental studies have been performed in a way that the
void drift contributed as well to the measured mixing rates. In the last decade, substantial efforts
have been made at the Kumamoto University in Japan to separate the effects of turbulent mixing,
void drift, and diversion crossflow during the measurement. There is a series of publications
describing air-water experiments performed for a variety of subchannels configurations: Sato and
Sadatomi (Sato, Y. and Sadatomi, M.); Kano et al. (Kano, K. et al., 2002); Sadatomi et al.
(Sadatomi, M. et al., 1994); Shirai and Ninokata (Shirai, H. and Ninokata, H., 2001); Kano et al.
(Kano, K. et al., 2003); Sadatomi et al. (Sadatomi, M. et al., 2003); Kawahara et al. (Kawahara, A.
et al., 2004); Sadatomi (Sadatomi, M., 2004), etc. Most of these exp en utilizing
“clean” rod bundles and the derived correlations do not account for the p
xes with and without spacers. It was shown that spacers
Lahey et al., 1972
ly Hotta et al. (Hotta, A. et al., 2004) have
on-isotropic diffusion coefficie
s on the turbulent mixing in rod
F-COBRA-TF 1.03 code version.
77

5.1.1 Turbulent Mixing Modeling in Subchannel Analysis Codes – Overview
In the subchannel codes, th ex e of m entum, energy, and mass due to turbulence, or
the so-called turbulent diffusion or turbulent m
e chang om
ixing, is commonly modeled in analogy to the
molecular diffusion under the assumption of a linear dependence between the exchange rate of the
given quantity and its gradient in the m
turbulent diffusion coefficients depend only on the location in the flow domain. The turbulent
e turbulent
diff sion coef
edium. The proportionality coefficients are called turbulent
diffusion coefficients. Unlike molecular diffusion coefficients, which are material dependent, the
kinematical viscosity and turbulent temperature diffusivity are of the same order of magnitude
(turbulent Prandtl number approaches unity). This assumption allows applying the sam
u ficient to all momentum, mass, and energy exchanges: tttt : aDC === ν . In case of
gradient in direction, the aforementioned assumption takes the form
bulent mixing of
y of:
Tur mass:
Ad
CAdcDm kktk
)(t
ραρ −=−=& (5.1)
dydy
Turbulent mixing of momentum:
Adydy
dGCA
UdCA
dydUI kkkk
tk tt)(
−=−==ρα
ρν& (5.2)
Turbulent mixing of energy:
Adydy
hdCA
TcdCA
dydTacQ kkkkkkk
tpk)()(
tp,
tραρα
ρ −=−==& (5.3)
Here the index stands for the given field (liquid, vapor, and droplets); is the turbulent
diffusion coefficient for mass transfer;
k tD
tν is the turbulent kinematical viscosity; is the turbulent ta
78

tem e concentration; is the specific heat capacity; perature conductivity; c is th pc A is the area
relevant for lateral exchange; α , ρ , U , and h are, respectively, the volume fraction of given
field, density, vertical velocity, and enthalpy.
n the raIn the subchannel analyses, very ofte tio dyC t is substituted with the ratio of the turbulent
kinematical viscosity ε and the mixing length l , lε , and the mixing length is commonly
approximated as the centroid distance between the adjacent subchannels. Regarding turbulent
diffusion coefficients, a dime onless parameter can be defined nsi
UyCt=β , (5.4)
where
∆
ji
jjii UAUAU
+
+= is the area averaged vertical velo
AAcity of the adjacent subchannels1.
Using the definition of the turbulent mixing coefficient, the exchange rate of mass, momentum
ough 5.3) can be written as:
Turbulent mixing of mass:
and energy (Equations 5.1 thr
AGm kkk )( ραρ
β ∆−=& (5.5)
Turbulent mixing of momentum:
AGGI kk ∆−=ρ
β& (5.6)
β is reduced to the mixing Stanton number. 1 If simple averaging is taken,
79

Turbulent mixing of energy:
AhGQ )( ραβ ∆−=& (5.7)
where
kkkk ρ
ji
jjii GAGAG
+= tot,tot, .
AA +
As concluded from Equation 5.4, the turbulent mixing coefficient is a function of the particular
geometry and the flow conditions. Under single-phase flow conditions, it is usually correlated to the
low Reynolds number, subchannel hydraulic diameter, heated rod diameter, gap width, and the
entroid between the adjacent subchannels:
f
c ),,,(Re, rodgaphydSP ydddf ∆=β . The correlations that
are
ase of two adjacent subchannels with equal hydraulic diameters show that these
correlations differ strongly from each other (see Table 4).
Nowadays, the state-of-the-art is to evaluate
more often used in the subchannel analyses are summarized in Table 3. Simple hand
calculations for a c
SPβ utilizing numerical experiments in means of
CFD calculations.
It is experimentally observed that in a two-phase flow the turbulent mixing is much higher than
gle-phase fl ften, the dependence of the mixing rate on the flow regime is
modeled by the Beus’ correlation (Beus, S. G., 1970). The two-phase turbulent velocity is assumed
to b the
in a sin ow. Most o
e a function of single-phase turbulent velocity: SPTP l
Θl
⎟⎞
⎟⎞
⎜⎛ εε , where the “two-phase
⎠⎜⎝⎛=
⎠⎝TP
multiplier”, , depends on the quality. The approach by Faya (Faya, A. J. G., 1979) has been
ado has ghtly modified the Beus’ approach by
applying the two-phase multiplier to the single-phase mixing coefficient:
TPΘ
pted in the subchannel analysis codes. Faya sli
TPΘ
80

SPTPTP ββ Θ= , where (5.8)
The mixing rate, and hence the turbulent velocity, reaches its maximum at the slug-annular
regime transition point. According to the model of Wallis (Wallis, G. B., 1969), this point can be
obtained by an expression for the corresponding quality:
)(TP xfΘ =
6.0
6.0)(4.0 hydvapliqliq +
− ρρρ dg
vapρliq
totmax
+
=ρ
Gx (5.9)
The function for is assumed to increase linearly for TPΘ maxxx ≤ and to decrease
hyperbolically for (Figure 6).
maxxx >
maxmaxTP )1(1
xxΘΘ −+= if (5.10)
maxxx ≤
0
0max)1xx
xx−−
with maxTP (1 ΘΘ −+= 0417.0
max
0 57.0 Rexx
= if (5.11)
where
maxxx >
mixµhydtot dG
Re = and ( ) vapvapliqvapmix 1 µαµαµ +−= .
The parameter , which is the maximum of the ratio maxΘ SPTP / ββ , is treated as a constant and
can
Table 5 gives examples for suggested values of Θ .
be estimated experimentally.
max
81

1
1θmax
1 xmax 1 x 1 x0
Figure 6: Two-phase multiplier ΘTP as a function of quality x according to Beus (1970)
Table 3: Summary of the published correlations for single-phase mixing coefficient
Beus (1970)
1θTP
gap
hyd1.0SP 0035.0
dd
Re−=β
Rogers and Rozehart (1972) rod
hyd,
5.1
hyd,
hyd,1.046.1
rod
1dd
dd
Re i
i
j
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛+
⎠⎝−
−
444 3444 21λ
gapSP 0058.0
21
dd
⎟⎟⎞
⎜⎜⎛
=β
Rogers and Tahir (1975) gap
hyd1.0106.0
rod
gapSP 005.0
dd
Redd −
⎟⎟⎠
⎞⎜⎜⎝
⎛=β
R owe and Angle (1967)gap
hyd1.0SP 0062.0
dd
Re−=β ; 2,w1,w
21hyd
)(4ppAAd
++
=
S
52.0
rod
gap*
8/1
gap
hydSP 0018.000562.0
−− ⎞⎜⎜⎝
⎛+⎟
⎟⎠
⎞⎜⎜⎝
⎛=
dd
FRe
dd
i
β ⎟⎟⎠
adatomi et al. (1996)
Stewart et al. (1977)
bRea=SPβ
gap
hydSP d
Rea b=d
β
y∆SP
dRea b= hydβ
Wang and Cao (at sub-cooled boiling)
1.0
gap
hydSubcooled Re015.0 −=
dd
β
Kim and Chung (2001)12 2/2
2/2
Re8
2RePr1
82 ββ α
γδα
γ−− += Str
dz
aSD
bS
SD
St frx
ij
hij
tij
h
12 Referenced in Jeong, et. al., (2004)
82

Table 4: Single-phase mixing coefficient as calculated with different correlations
Beus SP,RoweAngle SP, 77.1 ββ =
Beus SP,
46.0
gap
rodhartRogersRo SP,β se 66.1 β⎟
⎟⎠
⎞⎜⎜⎝
⎛=
dd
Two adjacent subchannels with equal hydraulic diameters
Beus SP,
106.0
rod
gap43.1 ββ ⎟⎟⎠
⎞⎜⎜⎝
⎛=
d rRogersTahi SP, d
GE 3×3 rod bundle
P
Janssen (1971)
,hartRogersRose SP, 91.2 Beus Sββ =
Beus SP,rRogersTahi SP, 26.1 ββ =
maxΘ Table 5: Suggested values for the
maxBellil et al. (1999) – air-water measurements 5 10≤≤ Θ ing on the liquid mass flux depend
Faya (1979) - by numerical studies 5max =Θ
50max =Θ Gonzale and Griffz-Santalo ith (1972) 13 – air-water measurements
Kelly (1971) ) - by numerical studies 105 max ≤≤ Θ
Sagawara et al. (1991)14 – air-water measurements
131m/s0.1
372
liq +⎟⎠
⎞⎜⎝
⎛−=
jΘ , where is the liqjmax ⎟⎜
superficial velocity of liquid
Sato (1992) – air-water measurements 5max =Θ
A brief summary of the turbulent mixing modeling in the known subchannel analysis codes is
13 In
within the whole slug flow regime, was observed.
14 Sagawara et al. assumed that the two-phase multiplier reaches its maximum at the transition from bubbly to
slug flow. Comparing to Beus, 1970:
stead of a sharp peak, a steep increase within the bubbly flow regime to the maximum value maxΘ , which lasts
TPΘ Beus max,Sugawara max, 22.0 xx = .
83

given below15. It will be seen that, excluding NASCA code, the subchannel analysis codes do not
model the spac mixing between adjacent subchannels.
1981). The l
lent mixing are given respectively as
er grids effect on the amount of turbulent
5.1.2 Turbulent Mixing Model of THERMIT-2
THERMIT-2 is a two-fluid two-phase subchannel code developed at the Massachusetts Institute
of Technology (Kelly, J. et al., ateral exchanges of mass, energy, and momentum due
to turbu dxsWW ijijkk )''(= ; ; and
F ijk
dxsqQ ijijkk )''(=
dxsijk )(τ= ngth between subchannels i and j; the is
the
heat fluxes due to turbulent m xing;
. In these equations, ijs is the gap le dx
axial mesh node size; kW '' is the phase k mass flux due to turbulent mixing; kq '' is phase k
ki τ is the phase k shear stress due to turbulent m
The turbulent shear stress term is approximated as
ixing.
( )l
GG ji −≈ε
τ where the turbulent velocity
is defined as ijsl ρ
ocity is calculated using the correlation by Rogers and Rosehart
modeled by Beus (Beus, S. G., 1970). The maximum of the two-phase multiplier is assumed equal
to 5: 5max =Θ .
Wε '
= .
The single-phase turbulent vel
(Rogers, J. T. and Rosehart, R. G., 1972). The dependence of the mixing rate on the flow regime is
5.1.3 Turbulent Mixing Model of COBRA-TF
The FLECHT_SEASET version of COBRA-TF (Paik, C.E. et al., 1985) is utilizing the same
models for turbulent mixing and void drift as the THERMIT-2 code but without applying the Beus’
15 In the following description, the nomenclature is as given in the corresponding References
84
model for the two-phase turbulent mixing.
urbulen Mixing Model of MATRA
Korea. (Yoo, Y. J. et al., 1999). In similarity to THERMIT-2 alculates the net lateral
mass flux due to turbulence as
5.1.4 T t
The subchannel code MATRA is an improved version of COBRA-IV-I developed at KAERI,
, MATRA c
GSW ijk β='' and uses the Beus’ model for the two-phase turbulent
mixing.
5.1.5 Turbulent Mixing Model of FIDAS
FIDAS is a three-fluid three-field code (Sagawara, S. et al., 1991). The code calculates the net
lateral mass flux due to turbulence as ( ) ijT
T
ijTMMij ScSc
W ρρµ
ρµρεε ∇⎟⎟
⎠
⎞⎜⎜⎝
⎛+−=∇+−= , where
cDSc
ρµ
=
is the Schmidt number. The turbulent dynamic viscosity is given as ∑ ⎟⎞
⎜⎛ +=
uulmT ρµ ,
where L is axial l h; and the mixing length is calculated
as
⎠⎝
2
zL
the lateral length; z is the engt
⎟⎟⎠
⎜⎜⎝
==2
,,1,1
jhihavehm KDKl . The single-phase turbulent velocity is calculated by Rogers and
Rosehart (Rogers, J. T. and Rosehart, R. G., 1972). The Beus’ model (Beus, S. G., 1970) is
Beus max,Sugawara max,
⎞⎛ + DD
modified such as and 22.0 xx = 131m/s0.1
2
max ⎟⎠
⎜⎝
5.1.6 Turbulent Mixin
37 liq +⎟⎞
⎜⎛
−=j
Θ .
g Model of VIPRE-2
V 2 i
We
IPRE- s a two-fluid two-phase code developed at PNL/EPRI, USA and currently used in
stinghouse, USA for safety analyses (VIPRE-02, 1994). The turbulent crossflow occurs by an
equal mass exchange between subchannels and is assumed equal to GSW mβ=' . As a second
85

option, an empirical formulation dy diffusivity t of the turbulence in terms of ed ε is employed:
⎟⎠⎝ l⎞
⎜⎛=
SW mtρε' , where is the gap width, is the gap centroid length, S l G is the average mass
flux in the lateral control volume, mρ is the mixture density, ⎟⎠
⎜⎝
=lU m
m⎞⎛t 1ε
β is an empirical mixing
coefficient, and is the mixture axial velocity. The turbulenmU t energy exchange in the lateral
direction for each phase is e phase mass fraction, and it is computed using the
relation
weighted by th
∑ ∆∆−=ik m
t hWXQε
φφφ
φ ρ
ρα ' , where X∆ is the axial node l i
difference across the lateral control volume for phase
ength, ∆ s the enthalpy φh
φ , and ∑ik ε
is a summation over all gaps k
onnected to channel i. The turbulent mixing between channels is included as a force in the axial
momentum equation. The total axial force, , in each phase due to turbulent momentum mixing is
computed as
c
mF
∑ ∆∆−=ik m
Tm UWXCFε
φφφ
ρ
ρα ' , where φU∆ is the axial velocity difference for phase
across the lateral control volume. The term is an empirical correction factor (the so called
turbulent momentum factor) to account for the imperfect analogy between turbulent transport of
thermal energy and momentum. If
TC
0.1=TC , energy and momentum are mixed with equal strength.
If , only energy is mixed by the turbulent crossflow. Turbulent momentum exchange is not
c
The development of the NASCA code is a joint work of several academic and industrial
organizations in Japan (Ninokata, H. et al., 2001, Hotta, A. et al., 2004, and Shirai, H. et al., 2004).
0.0=TC
onsidered in lateral direction.
5.1.7 Turbulent Mixing Model of NASCA
86

( ) ( ){ }jkkikkTMTP
TMkij lραραεTurbulent mixing is modeled as φ −⎟
⎠⎞
⎜⎝⎛=
,, , where the two-phase turbulent
velocity is given as ⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛=⎟
⎠⎞
⎜⎝⎛
TP
kTM
SPTMTP ll ρρ
θεε
,
xing velocity on the geometry. The geom
. NASCA assumes a dependence of the single-
phase mi etry effect is modeled by applying the so-called
rod shape factor *iF , which accounts for the spacer grids as well:
10
**
1(1
111
−
−
⎞
⎜⎜
⎛
=⎟⎞
⎜⎛
+==⎟⎞
⎜⎛
y
yji
j
iSFFε 0
1)()−
⎟⎟⎟⎟⎟
⎠⎜⎜
⎜
+⎟⎠
⎜⎝+⎠⎝
∫∫
jiijjiijkjkiSP
dyyS
dyy
SSlll εεεε, where is the gap size
at the lateral distance (see Figure 7).
⎝kjki εε
)(yS
i j
y=0y=yi
S(y)
i j
y=0y=yi
S(y)
Figure 7: Definition of the gap size at the lateral distance in NASCA
MONA-3 is a three-field two-phase code developed in Westinghouse, Sweden in cooperation
5.1.8 Turbulent Mixing Model of MONA-3
with Studsvik Scandpower AS and the Royal Institute of Technology, Stockholm (Nordsveen, M. et
al., 2003). The effect of turbulent mixing is modeled for momentum and energy equations. A
turbulent viscosity concept is used and both a Prandtlt type model and a model by Ingesson
87

(Inges , 1son, L. 969) are implemented:
2)(2 kjkik
mU
lij
Tk lνν
ν =+
+∆ ,
ijgap
ijgapm
ldl
ld +
⋅= Prandtl type
820kk
Tkν Υ= , 2.0Re18.0 −= kf , Re fν
hD12.6=Υ Ingesson’s model
n the above equations, l is the mixing length; d is the gap width, U
P
I m gap k∆ is the phase velocity
difference between the two subchannels; Υ is the velocity adjustment factor; and is the distance
between the centers of gravity of the subchannels.
5.2 ing Model
In the COBRA/TRAC code version, only a single-phase mixing (single-phase liquid for void
fractions below value of 0.6, single-phase vapor for void fractions above value of 0.8, and a ramp
bet f the traditional mixing coefficient approach. Later,
in the FLECHT SEASET code version, a void drift model based on the work of Lahey and Moody
(Lahey, R. T. and Moody, F. J., 1993
ass ous phase and its modeling has been not applied to the
hot wall flow regimes. However, the model implementation into the COBRA-TF conservation
equations led to a distortion of th
conditions. As discussed in section 3.3.3, F-COBRA-TF modeling of turbulent mixing and void
drift was revised and improved by Avramova (Avramova, M. N., 2003b). The following sections
wil
ijl
F-COBRA-TF Turbulent Mix
ween the two) has been modeled by means o
) has been employed (see section 3.3.3). Void drift was only
umed to occur when the liquid is continu
e mass balance and numerical instabilities at pre- and post-CHF
l describe the current code models for intra - and intersubchannel mass, momentum, and energy
transfer.
88

5.2.1 F-COBRA-TF Turbulent Mixing and Void Drift Models
The F-COBRA-TF turbulent mixing and void drift models assume that the net two-phase
mix void fraction gradient. At an
annular film flow regim assumed and only the turbulent mixing of vapor and
entrained droplets is modeled. In other words, the void drift is only modeled in bubbly, slug, and
churn flow, where liquid is the continuous phas
2005b).
The lateral exchange due to turbulent mixing
ing (including void drift) is proportional to the non-equilibrium
e a void drift offset is
e and vapor is the dispersed phase (Glueck, M.,
is modeled as follows:
Turbulent mixing of mass in phase k:
(TM GAGm )( ραβραβ =∆−=& )iijjk k,k,k,k,kk ραρρ
− (5.12)
Turbulent mixing of momentum in phase k:
AGGI TMk k∆−= β& (5.13)
ρ
Turbulent mixing of energy in phase k:
AhGTM ραρ
β ∆−=&
In Equations 5.12 through 5.14 SPTP
Qk )( kkk (5.14)
ββ Θ= is the two-phase turbulent mixing coefficient.
Currently the single phase mixing coefficient SPβ may be either specified as a single input value
or internally calculated choosing between two empirical correlations: Rogers and Rozehart (Rogers,
J. T. and Rosehart, R. G., 1972) and Rogers and Tahir (Rogers, J. T. and Tahir, A. E. E., 1975). The
89

two-phase mul se
turbulent mixin
tiplier TPΘ is calculated using the Beus’ approach (Beus, S. G., 1970) for two-pha
g as given by Equations 5.8 through 5.11.
The lateral exchange due to void drift is modeled as follows:
Mass exchange in phase k by void drift:
( ) AGm iijjVD
EQ,k,EQ,k,EQ,k,EQ,k, ραραβ −=& (5.15)
Momentum exchange in phase k by void drift:
k ρ
( ) AGGGI ijVDk EQ,k,EQ,k, −=
ρβ& (5.16)
Energy exchange in phase k by void drift:
( ) AhhGQ iiijjjVDk EQ,k,EQ,k,EQ,k,EQ,k,EQ,k,EQ,k, ραρα
ρβ −=& (5.17)
According to Levy (Levy, S., 1963) the equilibrium density distribution is related to the mass
ux distribution. This assumption was further used by Drew and Lahey (Drew, D. A. and Lahey, R.
ical derivation of a void drift model for subchannel analyses. The model is well
documented and currently used in many subchannel codes. Detailed description of the
implementaion of the Drew and Lahey’s model in the THERMIT-2 (MIT) and the COBRA-TF
(PSU) subchannel codes are published in Kelly, J. E. et al., 1981 and Avramova, M. N., 2003b. The
model is used in F-COBRA-TF as well.
fl
T., 1979) for analyt
90
5.2.2 Modifications to the F-COBRA-TF Turbulent Mixing and Void Drift Models
Addressing the New Spacer Grid Modeling
In F-COBRA-TF only one explicit source term, which accounts for both turbulent mixing and
void drift, is added to each code conservation equation (Equations 3.1 to 3.9). Moreover, the same
mixing coefficient is applied to both processes:
Mass equations:
( ) ( )444444 2144444 344444 21EQ,k,EQ,k,k,k,k,k, ijiijjkkk ρρ 4444 344
&&&
drift void
EQ,k,EQ,k,
mixingturbulent
AGAGmmm ijVDTM ραραβραραβ −+−−=+=
(5.18)
Momentum Equations:
( ) ( )4444 34444 21444 3444 21
&&&
driftvoid
EQ,k,EQ,k,
mixingturbulent
k,k, AGGGAGGGIII ijijVDk
TMkk −+−−=+=
ρβ
ρβ (5.19)
Energy equations:
( ) ( )EQ,k,EQ,k,EQ,k,EQ,k,EQ,k,EQ,k, AhhA iiijjji ραραρ
β −+ 444444444 3444444444 21444444 3444444 21
&
drift voidmixingturbulent
k,k,k,k,k,k, GhhGQQQ
iijjj
kkk
ραραρ
β −−=
+=
In order to prepare F-COBRA-TF for implementation of the new spacer grid model, in which
the spacer effects on the turbulent mixing and the void drift have to be modeled independently,
&& VDTM
(5.20)
91

minor coding modifications were performed such that at tw
phase multipliers are applied to the turbulent mixing and to the void drift terms: the two-phase
turbulent mixing multiplier and the void drift multiplier Θ
to the mass conservation equation of phase k is given as:
o-phase conditions two different two-
TMTPΘ VD
TP . Then, for example, the source
( ) ( )44444444 344444444 21444444 3444444 21
drift voidmixingturbulent
VDTM +=
&&&
EQ,k,EQ,k,EQ,k,EQ,k,k,k,k,k, AGAGmmm
iijjSPVDTPiijjSPTP
k
ραραρ
βραραρ
β −Θ+−Θ−=
+=
(5.21)
Moreover, instead of introducing one combined source term kkk mmm &&& to the right hand
side (RHS) of the phase k mass equation, two independent terms and are evaluated and
added:
TM
VDTMkk
TMkm& VD
km&
( ) AGm iijjSPTMTP
TMk k,k,k,k, ραραβ −Θ−=& (5.22)
ρ
and
( ) AGiijjSP
VDk EQ,k,EQ,k,EQ,k,EQ,k, ραρα
ρβ −Θ= (5.23m VD
TP& )
In similarity, sources to the phase k momentum equation are
( ) AGGI ijSPTMTP
TMk k,k, −−=
ρβ& (5.24) G
Θ
( ) AGGI ijSPVDTP
VDk EQ,k,EQ,k, −Θ=
ρβ& (5.25)
k
G
and sources to the phase energy equation are
92

( ) AhhGQ TMTM ραραρ
β −Θ−=& (5.26) iiijjjSPTPk k,k,k,k,k,k,
( ) AhhGQ VDVD ραραρ
β −Θ=& (5.27)
In the above equations, superscripts TM and VD stand for turbulent mixing and void drift,
respectively.
It c
iiijjjSPTPk EQ,k,EQ,k,EQ,k,EQ,k,EQ,k,EQ,k,
an be seen that the major assumption of the turbulent mixing modeling is not changed: the
same single-phase mixing coefficient SPβ is applied to the ma momentum, and energy exchange: ss,
UyCt=β , where == tttt : aDCSP ∆
= ν .
A sensitivity study confirmed that the new coding approach does not create numerical
instabilities since the net amount of mass, momentum, and energy added to the RHS of the
conservation equations have not changed.
5.2.3 Modifications to F-COBRA-TF Turbulent Mixing and Void Drift Models
Addressing Some Experimental Findings
During the Kumamoto University air-water experiments it has been found that the two-phase
multiplier , which corrects the single-phase mixing coefficient, has different dependence on the
void fraction for fully-developed and for developing flows, as it is shown in Figure 8 and Figure 9.
Ba ation, the authors of NASCA code (Hotta, A., 2005) have applied two different
two-phase m ltipliers: turbulent mixing two-phase multiplier
TPΘ
sed in this observ
u TMΘ and void drift multiplier VDΘ .
The Kumamoto University experimental observations were modeled in F-COBRA-TF. In F-
93

COBRA-TF, the transition to annular flow is not necessary controlled by a fix void fraction value,
therefore to be in an agreement with the code flow regime logic, the void drift coefficient was
disabled in annular flow. The code modification was validated against 4×4 PELCO-S experiments
(Herkenrath, H. et al., 1979). Because the F-COBRA-TF comparisons showed that the
implementation of the Kumamoto University model into F-COBRA-TF leads to significant
misprediction of the measured distribution of the exit quality, the model was removed from the
code.
In addition, the equilibrium distribution weighting factor , was correlated to the pressure as
proposed by KAERI (Jeong, J. J. et al., 2005b):
MK
[ ]PK 215.0exp2.6M −= .
94
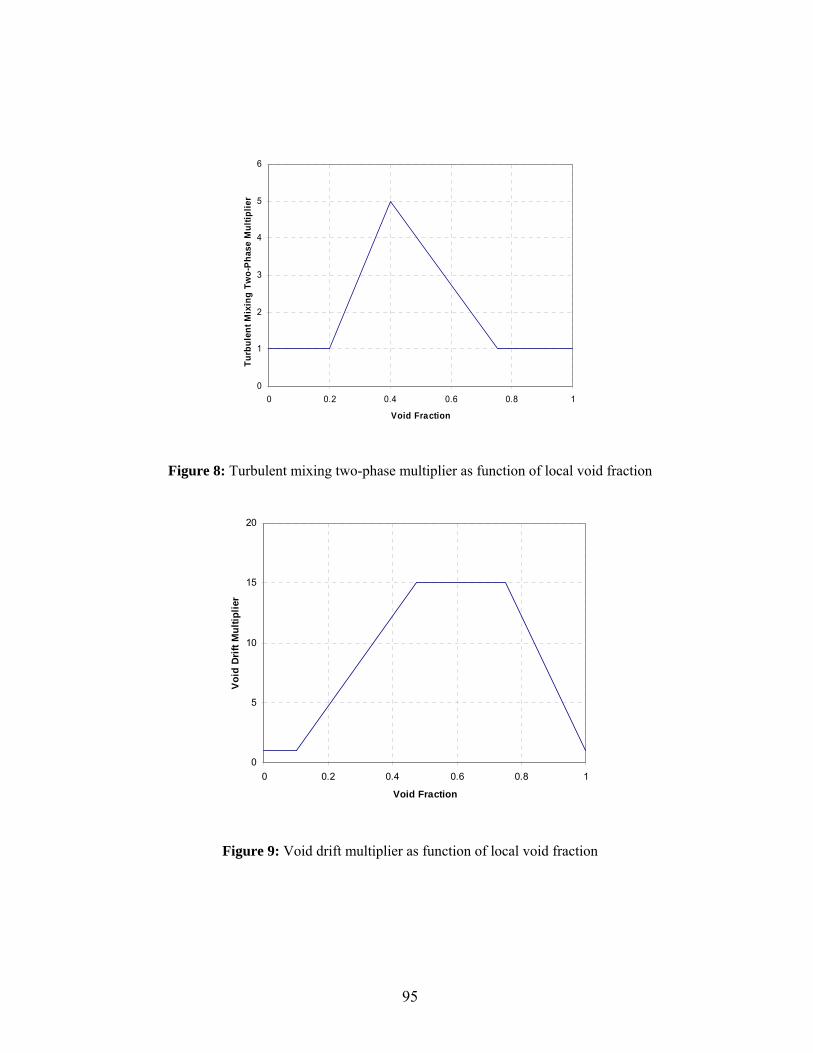
5
iplie
r
0
1
2
3
4
0 0.2 0.4 0.6 0.8 1
Turb
ent M
ing
Tw
hase
6
Void Fraction
ulxi
o-P
Mul
t
Figure 8: Turbulent mixing two-phase multiplier as function of local void fraction
20
00 0.2 0.4 0.6 0.8 1
5
10
15
Void Fraction
Voi
d Dr
ift M
ultip
lier
Figure 9: Void drift multiplier as function of local void fraction
95

5.3 Evaluation of the Single-Phase Mixing Coefficient by Means of CFD
Calculations
5.3.1 Methodology
omputatC ional fluid dynamics can be utilized for an evaluation of the single-phase mixing
coe
Approach 1: Evaluation of the single phase mixing coefficient by the turbulent viscosity
fficient in two ways: 1) by CFD predictions of the turbulent viscosity (Ikeno, T., 2001) or 2) by
CFD predictions of the turbulent heat flux across the gap between adjacent subchannels (Jeong, H.
et al., 2004). In both methods, the CFD model must be settled correctly to assure the diffusive
nature of the turbulent mixing processes: no net mass flow over the gaps between subchannels must
occur.
Let’s assume two identical subchannels connected through a gap (Figure 10).
According to Equation 5.4 the dimensionless turb xing coefficient
Figure 10: Model for the evaluation of the single-phase mixing coefficient by the turbulent viscosity
ulent mi β can be defined by
applying kinematical turbulent viscosity as a turbulent diffusion coefficient ( turbtC ν≡ ):
Uyturb
SP ∆=ν
β , (
wh
5.28)
ere turbν is the surface-averaged kinematical turbulent viscosity, U is the surface-averaged
y∆
96

vertical velocity, and is the centroid distance bey∆ tween adjacent subchannels. Both, turbν and U
can be evaluated from single-phase CFD calculations.
Approach 2: Evaluation of the single phase mixing coefficient by the turbulent heat flux across
the gap
Let us assume two adjacent subchannels with identical geometries and equal inlet mass
velocities (Figure 11). A temp
subchannel j (right ld
one. Thus, the heat transfer between both subchannels is achieved only by two processes –
conduction and turbulent diffusion (mixing).
Figure 11: Model for evaluation of the single-phase mixing coefficient by the turbulent heat flux across
The heat rate due to turbulent mixing and conduction per unit length through the gap Sij (at
stea state flow conditio
. (5.29)
The heat flux through the gap is given as:
erature difference of 10 °C between the subchannels is applied. The
i (left side) is assumed to be the hot one, while the subchannel side) is the co
the gap
dy ns) is equal to
xSqQQQ ijtotalini
outitotal ∆=−= ''
∆x
∆y
iniQ
injQ
out outQiQ j
hot cold Sij
97

( )443442143421
&
&ii h
ini
outip
m
flowiiiiiijtotal TTcAUhmxSq
∆
−=∆=∆ ρ'' (5.30)
( ) ''''''in
iout
ipflow
iii qqTTcAU
q +=−
=ρ
conductionturbulencetotal xS ∆ (5.31)
The he
ij
at flux through the gap due to conduction is:
( )yTT
qout
ioutj −
−= λ'' . (5.32) conduction ∆
The heat flux through the gap due to turbulent mixing is:
( ) ( )⎟⎜ ∆∆ yxSconductiontotalturbulence
ined as:
⎟⎠
⎞⎜⎝
⎛ −−−
−=−=
TTTTcAUqqq
outi
outj
ij
ini
outip
flowiii λ
ρ'''''' . (5.33)
Thus, the turbulent mixing coefficient can be def
fluxheat axiale turbulenc todueflux heat t coe mixing p se-ingle fficienhas =
or (5.34)
)(
''
ijp
turbulence
TTUcq
−=
ρβ .
Since, for water the turbulent thermal conductivity is much higher than the molecular one
Equation 5.34 can be written as:
)(
''
ijp TTUc −=
ρβ (5.35)
turbulencetotal
totalq
where qq ≡ . ''''
98

In theory, when the mixing coefficient is defined using Equation 5.28 it will be representing
only turbulent diffusion, but not molecular diffusion. On other hand, Equation 5.35 will calculate
the mixing coefficient due to turbulent and molecular diffusion together.
Here, it should be highlighted that the heat flux determined by a subchannel based heat balance
( inout TT − ) will inii clude the contribution of both convective and diffusive transfers. The real
diff only by a local (near gap) heat balance
ogT
In regard to F-COBRA-TF, since the code is developed for LWR applications both
methodologies are applicable, but the one using heat transfer balance seems to be more appropriate
for the scale of subchannel analyses. However, both approaches were examined and compared in
regard to their applicability and numerical stability.
5.3.2 CFD Model
For purpose of preliminary investigations of the proposed methodology for the single-phase
ation, a simple 2×1 STAR-CD (STAR-CD Version 3.26) model for thermal-
hydraulic analyses of the heat transfer between adjacent subchannels has been developed at
AREVA NP GmbH (Kappes, Ch., 2006). The model corresponds to ones shown in Figure 10 and
Figure 11 and it simulates only a heat transfer by diffusive effects. No net mass transfer is assumed
to occur. The objective was to study the turbulence in the gap between the rods. Segments of six
rods with outer diameters of 9.5 mm were arranged in a 2×1 subchannels configuration with a rod-
to-rod pitch of 12.7 mm over the axial length of 540 mm. The coupled subchannels have equal inlet
velocities, but the inlet temperatures differ by 10 °C. The applied boundary conditions are inlet
velocity of 5 m/s and outlet pressure of 160 bars; symmetry condition is assumed at the gaps
usive heat flux over the gap region can be evaluated
( ingap
utap T− ).
mixing coefficient evalu
99

between the ity of 5 %
is modeled. The water properties are assumed to remain constant along the axial length. A simple
conjugated-gradient solver with upwind discretization was used. The standard
rods; the walls are smooth, no-slip, and adiabatic. The inlet turbulence intens
ε−k high Reynolds
number turbulence model was utilized. The accuracy was set to 10-4 and typical mesh size of 0.3
mm was selected.
The 2×1 STAR-CD model is summarized in Table 6.
In total ten sub-models were calculated. At the beginning no internal structures were included: a
clean bundle was simulated. In the next four models straps with different thicknesses were inserted,
respectively 0.3 mm, 0.4 mm, 0.5 mm, and 0.6 mm. In the last set of calculations, the model with
strip thickness of 0.4 mm was selected and four mixing vanes were attached at the upper edge of the
strip. The vane angle was varied between 10 and 50 degrees in intervals of 10 degrees. The mixing
vanes were mirrored and rotated in order to produces pure circular flow inside the subchannels.
The model and the mixing vanes configuration are visualized in Figure 12 and Figure 13,
respectively. Figure 14 shows the mesh structure of the model. The mixing vane geometry is given
in Figure 15.
The distributions of the temperature field, turbulent viscosity, vertical velocity, and pressure
field are given in Table A-1through Table A-8 of Appendix A.
100
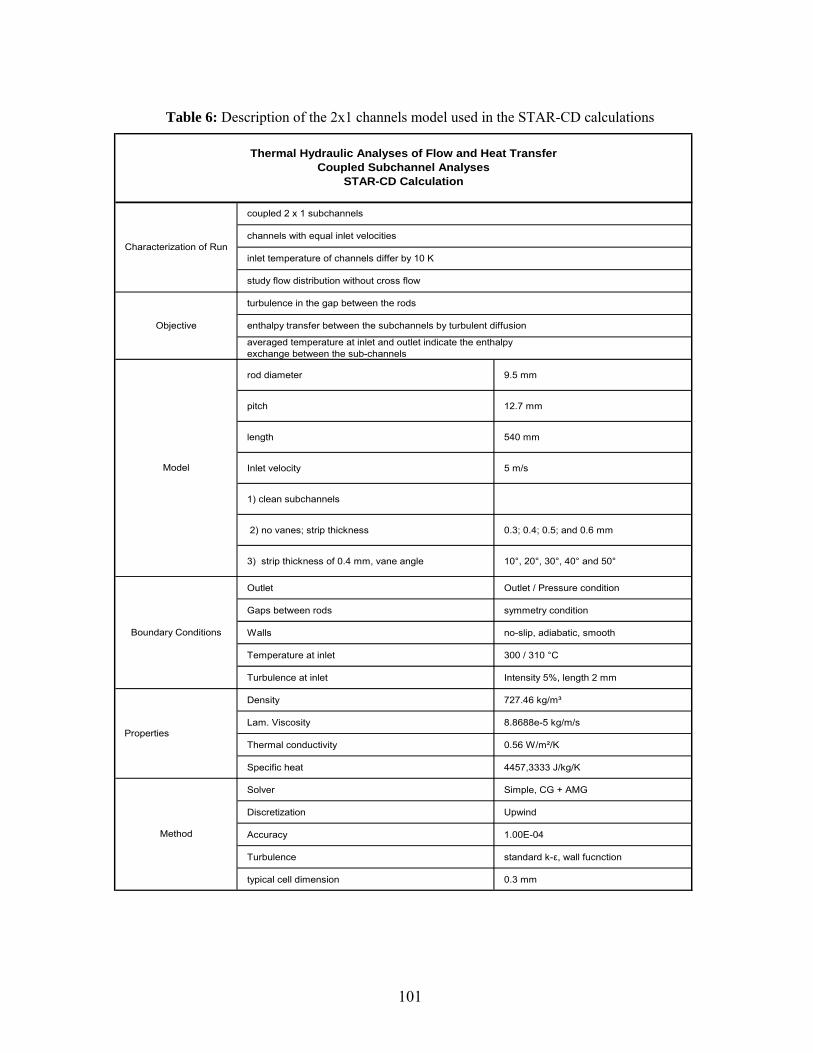
Table 6: Description of the 2x1 channels model used in the STAR-CD calculations
ion
typical cell dimension 0.3 mm
inlet temperature of channels differ by 10 K
Properties
Model
Objective
Boundary Conditions
Method
Thermal Hydraulic Analyses of Flow and Heat TransferCoupled Subchannel Analyses
STAR-CD Calculation
study flow distribution without cross flow
turbulence in the gap between the rods
enthalpy transfer between the subchannels by turbulent diffusion
averaged temperature at inlet and outlet indicate the enthalpy exchange between the sub-channels
Characterization of Run
coupled 2 x 1 subchannels
channels with equal inlet velocities
rod diameter 9.5 mm
pitch 12.7 mm
length 540 mm
Inlet velocity 5 m/s
1) clean subchannels
2) no vanes; strip thickness 0.3; 0.4; 0.5; and 0.6 mm
3) strip thickness of 0.4 mm, vane angle 10°, 20°, 30°, 40° and 50°
Outlet Outlet / Pressure condition
Gaps between rods symmetry condition
Walls no-slip, adiabatic, smooth
Temperature at inlet 300 / 310 °C
Turbulence at inlet Intensity 5%, length 2 mm
Density 727.46 kg/m³
Lam. Viscosity 8.8688e-5 kg/m/s
Thermal conductivity 0.56 W/m²/K
Specific heat 4457,3333 J/kg/K
Solver Simple, CG + AMG
Discretization Upwind
Accuracy 1.00E-04
Turbulence standard k-ε, wall fucnct
101

Figure 12: 2×1 CAD model nsfer by turbulent diffusion
for thermal-hydraulic analysis of heat tra
Figure 13: Side and top views of the mixing vanes configuration
102

Figure 14: Mesh grid of the 2×1 model
Figure 15: Geometrical characteristics of the mixing vanes in the 2×1 model
103

5.3.3 Evaluation of the Single-Phase Turbulent Mixing Coefficient
-model the following data was extracted from the CFD results:
i j
2) Axial distribution of the surface-averaged dynamic turbulent viscosity surfturbµ ;
3) Axial distribution of the subchannels gap-averaged temperatures gapiT and gap
jT ;
4) Axial distribution of the subch
Using the results obtained with the above described 2×1 STAR-CD model, the single-phase
mixing coefficient was evaluated with both approaches discussed in section 5.2.1 (Equations 5.32
and 5.34). For each sub
1) Axial distribution of the subchannels surface-averaged temperatures T and T ;
annels gap-averaged dynamic viscosities and ;
tan
surf surf
gapiturb,µ gap
jturb,µ
5) Axial distribution of the subchannels gap-averaged vertical velocities gap and gap
The surface-averaging is done over each subchannel cross-sectional area at every 10 mm axial
elevation and the gap-averaging is done over shells of -0.1 mm (left side – subchannel i ) and 0.1
mm (right side – subchannel j ) from the gap between subchannels at every 10 mm axial elevation.
The data is available also in a fine axial scale of 3 mm. Because of the assumption for cons t
water properties, the surface-averaged axial velocity,
iU jU .
surfU , is equal to the inlet vertical velocity of
5 m/s over the whole length.
During the investigation of the single-phase mixing coefficient by a heat balance, it was found
that a smother axial distribution of the heat flux across the gap is evaluated when instead of taking
the heat balance over a subchannel control volume, the balance is performed with a local
temperature gradient over the gap.
Figure 17 through Figure 22 show the axial behavior of the evaluated single-phase mixing
104

coefficients for different strap thickness and vane declination angles. For the purpose of
comparative analyses, the evaluations with Approach 1 were performed in two ways: 1) using
surface-averaged quantities - surf
surfturb
SP =ν
β ; and 2) using gap-averaged quantities - Uy∆
gapturb
SPUy∆
=ν
β . It can be seen in Figure 17 and Figure 18 than for the cases with no mixing vanes gap
both methods predict relatively close axial distributions of the mixing coefficient: there is a sharp
increase downstream of the strap upper edge followed by a decrease, after which a tendency exists
of stabilizing around the clean bundle value. The mixing coefficient calculated by surface-averaged
qua
The picture becomes more complicated and somehow difficult to explain when the mixing
vanes are added - Figure 19 and Figure 20. Physically, due to the swirl flow created by the mixing
vanes, the turbulence downstream of the vanes is expected to be significantly enhanced. However,
this phenomenon is not captured by our evaluations of the mixing coefficient by using turbulent
viscosity. In completely opposite manner, Figure 19 indicates a decrease of the mixing coefficient.
This unexpected result is not due to errors during the extractions of the CFD data or during the
ntities tends to be a little bit higher.
SPβ
evaluations, because it is in an agreement with the turbulent viscosity distributions over subchannel
cen
When evaluating the single-phase mixing coefficient
troids line as given in Table A-8 of Appendix A.
SPβ by the turbulent viscosity and the
vertical velocity averaged over the gap region (see Figure 20) there is an increase in the mixing rate,
ixing
vanes. After that region the turbulence tends to reach the clean bundle values. Again, these
predictions are following the turbulent viscosity distributions over gap between rods as given in
but upstream of the mixing vanes and a sharp decrease exists over and shortly after the m
105

Table A-8 of Appendix A.
Other important observation is that the magnitude of the mixing coefficients evaluated with
Approach 1 is one order lower than the expected value of 10-3 for the simulated conditions. Let’s
recall that our CFD calculations were performed with the standard ε−k turbulence model. This
model neglects the large eddy structures, which exist in the gap region and have a significant
contribution to the exchange processes between subchannels by their cyclic flow pulsation through
the gaps. As already discussed in section 2.3 the same finding were reported by Ikeno (Ikeno,T.,
2001).
From analyses of the evaluated mixing coefficients by the heat transfer balance (Approach 2,
see Figu lly
reasonable results. Right after the straps there is an augmentation in the turbulent mixing due to
flow
e 22) - a decrease in the turbulent mixing is
obs
ed model of Ikeno (Ikeno,T., 2001) (see Figure 16). As described in section 2.3,
Ike
re 21 and Figure 22) it can be stated that this method results in more stable and physica
area expansion. Thicker the strap is, stronger the mixing is. An interesting behavior is found
shortly downstream of the mixing vanes (see Figur
erved in that region. After that the turbulence quickly recovers and lasts up to the next strap. The
length of the decrease depends on the declination angle – larger the declination angle is, shorter the
decrease is. Higher mixing coefficient corresponds to larger vane angle.
It should be mentioned here that the short decrease right downstream of the vanes has been seen
also in the improv
no overcame the deficiency of the standard ε−k turbulence model to capture the large eddy
structure at the gap region by adopting the flow pulsation model of Kim and Park (Kim, S., and
Park, G.-S., 1997) with analytical formula for the Strouhal number.
106

107
Figure 16: The non-dimensional eddy thermal diffusivity calculated by Ikeno (Ikeno,T., 2001
Another important advantage that Approach 2 shows is the magnitude of the evaluated mixing
coefficients – they are in the expected range of 10-3.
The above discussed investigations of the proposed methodologies for evaluation of the single-
phase mixing coefficient by means of CDF calculations led to the selection of the so-called
Approach 2: Evaluation of the single-phase mixing coefficient by the turbulent heat flux across the
gap for an implementation into F-COBRA-TF for modeling of the enhanced turbulent mixing by
the spacer grids.
The selected method was used for estimations of the spacer mixing coefficient for the
ULTRAFLOWTM spacer design (trademark of AREVA NP GmbH). Comparative analyses to the
original F-COBRA-TF spacer grid modeling were performed for the ATRIUMTM10 XP BWR
bu e
measurements does not allowed a validation of the proposed method against experimental data.
)
ndle, with is equipped with ULTRAFLOWTM spacers. The lack of suitable AREVA NP in-hous

Single-Phase Mixing Coefficientsurface-averaged
0.0000
0.0002
0.0004
0.0006
0.0008
0 100 200 300 400 500 600
Height, mm
Mix
ing
coef
ficie
nt 0.3 mm0.4 mm0.5 mm0.6 mmclean channels
strip
valuation of the single-phase mixing coefficient using surface-averaged turbulent viFigure 17: E scosity and
vertical velocity – dependence on the strap thickness
Single-Phase Mixing Coefficientgap-averaged
0.0000
0.0001
0.0002
0.0003
0.0004
0.0005
0 100 200 300 400 500 600
Height, mm
Mix
ing
coef
ficie
nt 0.3 mm0.4 mm0.5 mm0.6 mmclean channels
strip
Figure 18: Evaluation of the single-phase mixing coefficient using gap-averaged turbulent viscosity and
vertical velocity – dependence on the strap thickness
108

Single-Phase Mixing Coefficientsurface-averaged
0.0000
0.0002
0.0004
0.0006
0.0008
0 100 200 300 400 500 600
Height, mm
Mix
ing
coef
ficie
nt 10 deg20 deg50 degno vanesclean channels
strip
Figure 19: Evaluation of the single-phase mixing coefficient using surface-averaged turbulent viscosity and
vertical velocity – dependence on the declination angle (strap thickness of 0.4 mm)
Single-Phase Mixing Coefficientgap-averaged
0.0000
0.0001
0.0002
0.0003
0.0004
0.0005
0 100 200 300 400 500 600
Height, mm
Mix
ing
coef
ficie
nt 10 deg20 deg50 degno vanesclean channels
strip
Fig nd vertical v .4 mm)
ure 20: Evaluation of the single-phase mixing coefficient using gap-averaged turbulent viscosity aelocity – dependence on the declination angle (strap thickness of 0
109

Single-Phase Mixing Coefficient
0.0000
0.0005
0.0010
0.0020M
ixi
coe
ffien
t
0.0015
0 100 200 300 400 500 600
Height, mm
ngci
clean channels
strip
0.3 mm0.4 mm0.5 mm0.6 mm
Figure 21: Evaluation of the single-phase mixing coefficient by local heat balance over the gap – dependence on the strap thickness
Single-Phase Mixing Coefficient
0.0000
0.0005
0.0010
0.0015
0.0020
0.0025
0 100 200 300 400 500 600
Height, mm
Mix
ing
coef
ficie
nt
10 deg20 deg30 deg50 degno vanesclean channels
strip
Figure 2 e gap – dependence on the declination angle (strap thickness of 0.4 mm)
2: Evaluation of the single-phase mixing coefficient by local heat balance over th
110

5.3.4 Incorporation of the CFD Results into F-COBRA-TF
The effect of the spacer grids on the turbulent m
, which is applied to the turbulent mixing rate as their are calculated by the current F-COBRA-
odels. The multiplier is a ratio of the
with mixing type spacer grid, , and the single-phase mixing coefficient evaluated for a
“clean” bundle, . It is a function of the axial dist
mixing vanes angle
ixing is modeled by an additional multiplier,
TMSGΘ
TF m single-phase mixing coefficient evaluated for a bundle
spacersSPβ
spacersnoSPβ ance y downstream of spacer and the
ϕ :
spacersnoSP
spacersSPTM y
ββϕ =Θ ),(
. (5.36)
It was expected that the spacer multiplier will have a peak near the upper edge of the mixing
vanes and will decrease further downstream. Its magnitude will increase with the strap thickness
(following the magnitude of the change in the flow area) and with the declination angle of the vanes
(following the magnitude of the swirling flow). Schematically, this behavior is shown in
Figure 23.
SG
1.0
TMSGΘ
x ZSG,1 ZSG,2 … ZSG,N
φ 1 > φ 2 ----- φ2 ___ φ
1
Figure 23: Schematic of the spacer multiplier distribution over the axial length
111

T uahus, Eq tions (5.29); (5.31); and (5.33) were modified as follows:
( ) AGm TMTMTM ραραρ
β −ΘΘ−=& (5.37) iijjSPTPSGk k,k,k,k,
( ) AGGGI TMTMTM −ΘΘ−=ρ
β& (5.38) ijSPTPSGk k,k,
( ) AhhGQ TMTMTM ραραβ −ΘΘ−=& (5.39)
If the new spacer model is being developed to use correlations for the spacer multiplier, this will
require an extensive set of numerical experiments in order to cover a large envelope of operational
conditions. However, in the view of the F-CO
iiijjjSPTPSGk k,k,k,k,k,k,ρ
BRA-TF development for industrial applications,
instead of implementing such correlations it will be more efficient to develop an interface module
to be applied to the code turbulent mixing model. The module will: 1) contain data base with
detailed information for the spacer multiplier distributio
mixing vane designs (obtained by means of CFD calculations) and 2) will maintain the exchange
between the CFD data base and F-COBRA
code could be supplied with sets of CFD data, which represent spacer designs that are currently
used. The users will be able to choose which data set to be used. I
“ex
ulent mixing modeling and examples for the CFD obtained
data sets of the mixing multipliers are given in Appendix C.
To address the flow regime dependence of the mixing coefficient, the axial velocity used in the
CFD pre-calculations (Eq. 5.35) must be calibrated to the actual axial flow velocity of the given F-
COBRA-TF computational cell.
n across a given bundle for a set of different
-TF. For the purposes of routine safety analyses, the
n case of new design studies, an
perienced” user will create a new data set based on recent CFD calculations.
The flow chart of the enhanced turb
112

5.3.5 Evaluations of the Spacer Grid Void Drift Multiplier
words must be aid for theHere, a few s spacer effect on the void drift phenomenon. The void
drift h velocity regions. On the other hand, the spacers
are
is characterized by the vapor affinity for hig
known to change the main velocity profile because of the flow area contraction and expansion
near their locations and/or flow deflection on their surfaces. The extent of this change could be used
as a criterion for an enhancement or a suppression of the local void drift. In similarity to the spacer
grid turbulent mixing multiplier, a spacer grid void drift multiplier, VDSGΘ , could be defined by
means of CFD predictions for the change in the main velocity profile at the spacer locations. The
purpose of applying a spacer grid void drift multiplier will be to drive more vapor into the
subchannel with the higher main flow velocity.
Thus, Equations (5.30), (5.32), and (5.34) can be modified as follows:
( ) AGm iijjSPVDTP
VDSG
VDk EQ,k,EQ,k,EQ,k,EQ,k, ραρα
ρβ −ΘΘ=& (5.40)
( ) AGGGI ijSPVDTP
VDSG
VDk EQ,k,EQ,k, −ΘΘ=
ρβ& (5.41)
( ) AhhGQ iiijjjSPVDTP
VDSG
VDk EQ,k,EQ,k,EQ,k,EQ,k,EQ,k,EQ,k, ραρα
ρβ −ΘΘ=& (5.42)
However, there is yet no clear concept how exactly the applied spacer grid void drift coefficient
will be calibrated to the main velocity.
113

5.3.6 F-COBRA-TF Modeling of the Turbulent Mixing Enhancement for
ULTRAFLOWTM Spacers
5.3.6.1 ULTRAFLOWTM Spacer Design
The ULTRAFLOWTM spacer design has swirl type mixing vanes intended to generate intensive
intra-subchannel swirl and turbulence, but no net mass crossflow. In each pair of adjacent
subchannels the swirling flows have opposite directions. A 3D view of the ULTRAFLOWTM spacer
is given in Figure 24. The spacer includes four swirl deflectors attached at the upper edge of the
interconnections between the straps. The swirl deflectors have an air vane structure including blades
that are conf as a pair of
tersecting triangular base plates extending upward from the interconnecting strips. The swirl
anes are bent in the same direction from the associated side base plates. A schematic of the mixing
vanes m i Figure 25.
igured to have the same vane rotation direction. Each swirl vane h
in
v
arrange ent in a 2×2 subchannels array s shown in
Figure 24: 3D view of the ULTRAFLOWTM spacer
114

115
Figure 25: Mixing vanes configuration of the ULTRAFLOWTM spacer design
5.3.6.2 CFD Model of ULRTAFLOWTM Spacer
An existing geometrical model of ULTRAFLOWTM spacer, developed at AREVA NP GmbH
for STAR-CD 3.26, was utilized for the evaluation of the mixing coefficient by heat balance across
the gap between adjacent subchannels. A schematic of the model is shown in Figure 26.
Figure 26: Schematic of the CFD model for the ULTRAFLOWTM spacer
Center of the control volume at altitude z - used for
differences between adjacent evaluation of the temperature
subchannels
Surface of the control volume at altitude z ±15 mm - used for cross-sectional averages

An existing coordinate system from the ULTRAFLOWTM spacer model was chosen. It starts at
7.45− mm and ends at 455.8 mm. For our evaluations, the region between 40− to +440 mm was
selected. Then, the leading edge of the spacer is on the coordinate z = -5.738 mm. The top of the
vanes is at z = +23.142 mm. Since the axial spacing for the evaluation is 30 mm, the first axial
section, -40 to -10 mm, is completely upstream the spacer; the second axial section, -10 to +20
mm, is almost completely containing the spacer; the third axial section, +20 to +50 mm, is almost
completely downstream the spacer (only the first 3mm contain a part of the top of the vanes); and
the fourth and following axial sections are in the region of the undistorted geometry of the bare rod
bundle.
The CFD analyses were all conducted with an inlet velocity of 2.59 m/s. The coupled
subchannels have equal inlet velocities, but different inlet temperatures. The water properties are
assumed to remain constant. A simple conjugated-gradient solver with upwind discretization was
used. The standard ε−k high Reynolds number turbulence model was utilized. The convergence
was set to 10-4.
CFD calculations were performed for two cases: 1) simulation of one span of a real
ULTRAFLOWTM spacer and 2) simulation of a “clean” 2×1 array of the ATRIUMTM10 XP bundle.
The distributions of the velocity and temperature fields and the turbulent viscosity are given in
Table B-1 through Table B-3 of Appendix B. The axial distributions of the mixing coefficients,
evaluated with Equation 5.35, are given in Figure 27 and Figure 28. The calculated spacer grid
multiplier is shown in Figure 29. As it is seen in the graphs, the first point, at altitude -25 mm,
show into s very high values. These values are taken just upstream the spacer. Here we have to take
116

account, that the inlet boundary conditions have some impact on the flow situation. The flow is not
yet fully developed. This causes also increased turbulent viscosities, which has an impact on the
numerically evaluated heat flux across the gap. Also, the inlet temperature is set to different values
for both subchannels. By this, we get a temperature step at the gap and with this a very high
temperature gradient. In our CFD analysis, the temperature gradient is reduced already
significantly, but still higher than the more developed flow situation downstream the spacer.
Passing the spacer gives so much change to the flow, that it is not more influenced at the outlet of
the spacer by the incoming temperature gradients. Thus, the suggestion is to not use the results
upstream the spacer for further analyses. Under reactor conditions, we always will have much more
developed flow situations than in a spacer span wise calculation. Therefore, it is more realistic to
apply values taken from regions close to the outlet of the calculation, because here the flow shows
an almost developed behavior. In reality, this would be anyway the inlet condition for the next
spacer span.
Single-Phase Mixing Coefficient from CFDULTRAFLOW Spacer
0.000
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008
-50 0 50 100 150 200 250 300 350 400 450
Height, mm
Mix
ing
coef
ficie
nt
Figure 27: CFD results for the single-phase mixing coefficient for the ATRIUMTM10 XP bundle
ULTRAFLOWTM spacers
117
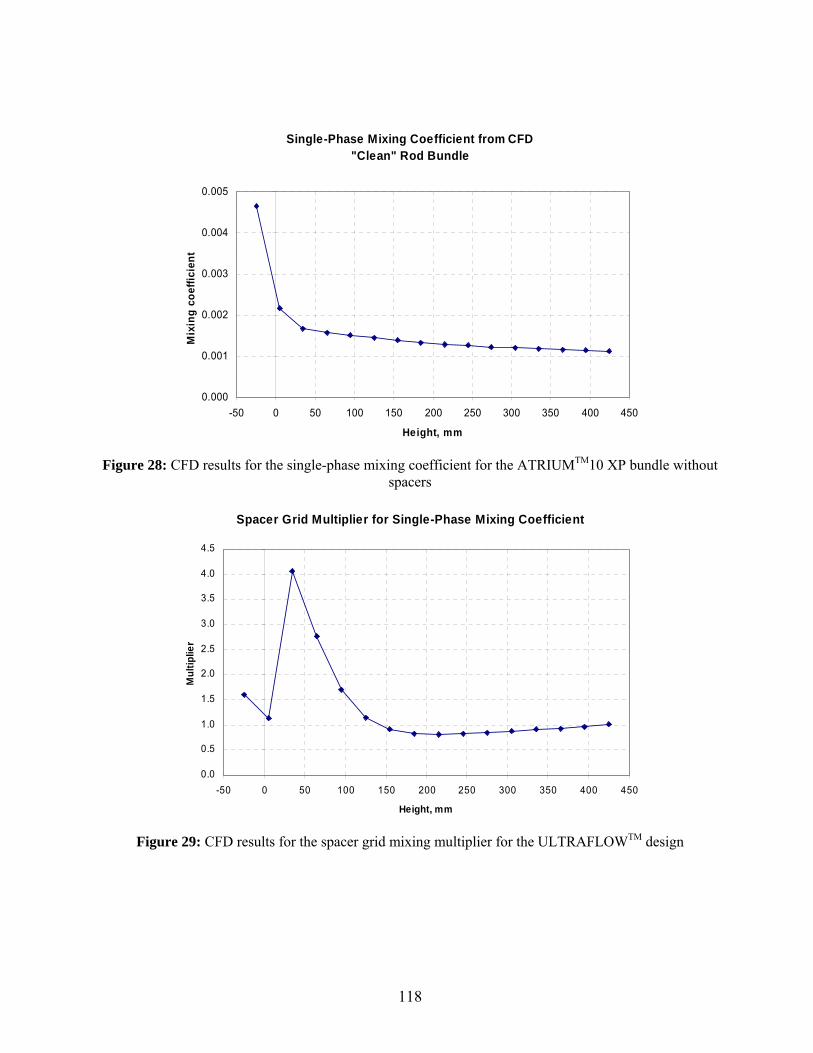
Single-Phase Mixing Coefficient from CFD"Clean" Rod Bundle
0.000
0.001
0.002
0.003
0.004
0.005M
ixi
g co
efci
ent
-50 0 50 100 150 200 250 300 350 400 450
Height, mm
Figure 28: CFD results for the single-phase mixing coefficient for the ATRIUM
nfi
out spacers
TM10 XP bundle with
Spacer Grid Multiplier for Single-Phase Mixing Coefficient
0.0
0.5
1.0
1.5
Height, mm
2.0
3.5
-50 0 50 100 150 200 250 300 350 400 450
Mu
Figure 29: CFD results for the spacer grid mixing multiplier for the ULTRAFLOWTM design
2.5
3.0
ltipl
ier
4.0
4.5
118

5.3.6.3 F-COBRA-TF Calculations of ATRIUMTM10 XP Bundle with ULTRAFLOWTM
Spacers
There are seven grids with mixing vanes instrumented along the heated length of the
ATRIUMTM10 XP bundle. The axial locations of the spacers are depicted in Figure 30. Using the
CFD results for the spacer grid mixing multiplier shown in Figure 29, a two-dimensional (2D) table
for the axial distribution of the spacer multiplier along the heated length of the ATRIUMTM 10 XP
bundle was prepared. The distribution is given in Figure 31.
The layout of the F-COBRA-TF model is given in Figure 32. It is a full bundle model, which
con
E.,
197
.
According to the F-COBRA-TF turbulent mixing model, the amount of the crossflow between
two adjacent subchannels is proportional to the density and void fraction gradients and the turbulent
mixing coefficient is a proportionality coefficient. By that reason, subchannels with equal cross-
sists of 117 subchannels and a large water channel. There are 91 fuel rods in total and 10 of
them are part-length rods. The model includes an unheated inlet part with one structural grid.
The turbulent mixing model, utilized in the performed calculations, defines the single-phase
mixing coefficient using the correlation by Rogers and Rosehart (Rogers, J. T. and Rosehart, A.
5) and the Beus’ model for two-phase mixing (Beus, S. G., 1970).
The pressure losses in the vertical flow are modeled with Equation 4.1 using experimentally
defined subchannel loss coefficients.
Two F-COBRA-TF calculations were carried out. In the first one the standard spacer grid model
was used. In the second calculation, at the spacer grid locations the single-phase mixing coefficient,
as defined with the correlation by Rogers and Rosehart, was enhanced with the spacer mixing
multiplier obtained by the CFD pre-calculations. The enhancement can be seen in Figure 33
119

sectional flow area, but different power loadings were selected for comparative analyses. The one
with the lower peaking factor is called “cold channel”, and the other is called “hot channel”.
The impact of the new model on the mass and energy redistribution inside the bundle is shown
in Figure 34 through Figure 41. A strong increase of the lateral flow transfer by turbulent mixing is
seen for both phases near and shortly downstream of the mixing vanes. However, Figure 42 shows
that for this particular bundle geometry the magnitude of the crossflow by turbulent diffusion is far
smaller than the diversion crossflow. Therefore, significant changes in the overall fluid thermal-
hydraulic performance due to the increased turbulence cannot be observed.
Regarding the graphs on Figure 34 and Figure 42, it has to be clarified that the axial position of
2.8 m, where there is a change of the crossflow direction, corresponds to the end of the part-length
rods. It seems that although the chosen subchannels rfaces of part-length rods, the
fluid
Additionally, the computational performance and efficiency of the modified code version was
investigated. Comparisons of the code temporal convergence are given in Figure 43. It is clearly
indicated that the new model does not result in a prolonged CPU time.
Performed stability analyses showed no distortions in the code convergence on mass and heat
balance due to the new modeling. The shape of the graphs in Figure 44 and Figure 45 is defined by
the simulated step-wise increase of the total power: the power of 100% is assumed to be reached at
1.8 second, after which the code needs about 1.2 seconds to obtain a steady state solution.
do not contain su
behavior in those subchannels is also affected by the flow area expansion at that elevation.
120

3708 mm
End of the Heated Length
Beginning of the Heated Length
275 mm
512 mm
512 mm
512 mm
512 mm
512 mm
512 mm
0.029 mm
Mixing vanes Spacer grid
Figure 3 of the
0: Axial positions of the ULTRAFLOWTM mixing spacers along the heated lengthATRIUMTM10 XP bundle
Spacer Grid Multiplier for ULTRAFLOW DesignATRIUM 10 XP Bundle
0
1
2
3
4
5
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
Heated lenght, m
Mul
tiplie
r
Figu XP
bundle re 31: Axial distribution of the spacer multiplier along the heated length of the ATRIUMTM10
121

91
1 2 3 4 5 6 7 8 9 10 11
12 13 14 15 16 17 18 19 20 21 22
23 24 25 26 27 28 29 30 31 32 33
34 35 36 37 38 39 40 41 42 43 44
45 46 47 48 49 50 51 52 53 54 55
56 57 58 59 60 61 62 63 64
65 66 67 68 69 70 71 72 73
74 75 76 77 78 79 80 81 82 83 84
85 86 87 88 89 90 91 92 93 94 95
96 97 98 99 100 101 102 103 104 105 106
107 108 109 110 111 112 113 114 115 116 117
1 2 3 4 5 6 7 8 9 10
11 12 13 14 15 16 17 18 19 20
21 22 23 24 25 26 27 28 29 30
31 32 33 34 35 36 37 38 39 40
41 42 43 44 45 46 47
48 49 50 51 52 53 54
55 56 57 58 59 60 61
62 63 64 65 66 67 68 69 70 71
72 73 74 75 76 77 78 79 80 81
82 83 84 85 86 87 88 89 90
Figure 32: Layout of the F-COBRA-TF model of the ATRIUMTM10 XP bundle
Spacer Grid Effect in the Mixing Coefficient
0.00
0.01
0.02
0.03
0.04
0.05
0 1 2 3 4 5
Heated lenght, m
Mix
ing
Coef
ficie
nt
standard modelspacer grid model
Figure 33: M dels
ixing coefficient determined by the standard and the new F-COBRA-TF mo
122

Lateral Flow by Turbulent Mixing of Liquid
-0.0020
-0.0016
-0.0012
-0.0008
-0.0004
0.0000
0.0004
0 1 2 3 4 5
Axial position, m
Flow
rate
, kg/
sstandard modelspacer grid model
Figure 34: Liquid crossflow by turbulent mixing, ULTRAFLOWTM spacer
Lateral Flow by Turbulent Mixing of Vapor
-0.00005
0.00000
0.00005
0.00010
0 1 2 3 4 5
Axial position, m
Flow
rat
e, k
g/s
standard modelspacer grid model
TMFigure 35: Vapor crossflow by turbulent mixing, ULTRAFLOW spacer
123

Void Fractionhot channel
0.0
0.1
0.2
0.3
0.4
0.5
0 1 2 3 4 5
Axial position, m
Vol
ume
frac
tion,
-
standard modelspacer grid model
Fi
gure 36: Void fraction in the hotter subchannel, ULTRAFLOWTM spacer
Void Fractioncold channel
0.0
0.1
0.2
0.3
0.4
0.5
0 1 2 3 4 5
Axial position, m
Volu
me
fract
ion,
-
standard modelspacer grid model
Fi
gure 37: Void fraction in the colder subchannel, ULTRAFLOWTM spacer
124

Flow Qualityhot channel
0.00
0.01
0.02
0.03
0.04
0.05
0 1 2 3 4 5
Axial position, m
Qua
lity,
-
standard modelspacer grid model
Figure 38: Flow quality in the hotter subchannel, ULTRAFLOWTM spacer
Flow Qualitycold channel
0.00
0.01
0.02
0.03
0.04
0.05
0 1 2 3 4 5
Axial position, m
Qua
lity,
-
standard modelspacer grid model
Figure 39: Flow quality in the colder subchannel, ULTRAFLOWTM pacer s
125

Enthalpy- Mixturehot channel
1200
1250
1300
1350
0 1 2 3 4 5
Axial position, m
Ent
halp
y, k
J/kg
standard modelspacer grid model
Figure 40: Enthalp TM spacer
y distribution in the hotter subchannel, ULTRAFLOW
Enthalpy- Mixturecold channel
1200
1250
1300
1350
0 1 2 3 4 5
Axial position, m
Ent
halp
y, k
J/kg
standard modelspacer grid model
Figure 41: E TM spacer nthalpy distribution in the colder subchannel, ULTRAFLOW
126

Lateral Flow Components
-0.008
-0.004
0.000
0.004
0.008
0 1 2 3 4 5
Axial position, m
Flow
rate
, kg/
stotalturbulent mixingvoid driftdiversion
Figure 42: Components of the total crossflow
Code Convergencetime step
0.00
0.20
0.40
0.60
0.80
1.00
0 100 200 300 400 500Time step number
CPU
time
per t
ime
step
, s
standard modelspacer grid model
Figure 43: Comparison of the code temporal convergence
127

Mass Balance
-100
-50
50
viat
io fr
omte
ady
ate,
%
0
100
0 1 2 3 4 5
Time, s
Den
s s
tstandard modelspacer grid model
Figure 44: Comparison of the code convergence on mass balance
Heat Balance
50e, %
-100
100
5
Time, s
Dn
st
y st
at
-50
0
0 1 2 3 4
evia
tio fr
omea
d
standard modelspacer grid model
Figure 45: Comparison of the code convergence on heat balance
128

5.4 Concluding Remarks
A comprehensive review of the recent trends in the turbulent mixing modeling in subchannel
codes indicates that the enhancement in the turbulent diffusion due to spacer grids in rod bundles is
negl
-T
The F-COBRA-TF turbulent mixing model was modified to use pre-calculated CFD results for
the enhanced turbulence due to spacer grids in rod bundles. A procedure that can be considered as
an o
ected in most of the codes. The development of new models requires either carrying out costly
experiments or performing computational fluid dynamics simulations. CFD capabilities allow us to
model the fluid behavior on a very refined spatial mesh and therefore to model local flow patterns
such as turbulence in the flow near spacer grids which are not “seen” by analyses on a subchannel
level.
Two methodologies were proposed for evaluation of the single-phase mixing coefficient by
means of CFD calculations: by evaluation of the turbulent viscosity and by heat balance across the
gap between two adjacent subchannels. The performed studies indicated that the second approach
gives more stable and physically reasonable results and therefore it was chosen for implementation
into F-COBRA F.
ff-line coupling between a CDF and a subchannel code was developed and verified for the
particular case of ATRIUMTM10 XP bundle with ULTRAFLOWTM spacer. For now, validation of
the model is not possible due to lack of suitable experimental data.
129

CHAPTER 6
MODELING OF DIRECTED CROSSFLOW CREATED BY SPACER GRIDS
6.1 Background
The crossflow in rod bundles can be divided into three categories: turbulent mixing, void drift,
and diversion crossflow. Additionally, some spacer designs create specific lateral flow patterns due
to velocity deflection on their structural elements as the mixing vane blades. This kind of diversion
crossflow is very often referred as directed crossflow. In other words, the directed crossflow is a
flow pattern caused by the sweeping effects of the vanes or other grid structures. The magnitude of
the directed crossflow depends of the spacer geometry. Examples for spacer designs creating
direc
declination angle, etc. The subchannel codes usually do not
have
), which
utilizes a simplified directed crossflow model. However, the work of Krulikowski (Krulikowski, T.
E., 1997) has shown that the model needs further improvements and more extensive validation.
ted crossflow are the HTPTM and FOCUSTM spacers (both are trademarks of AREVA NP
GmbH). Schematics of both designs are shown in Figure 46 and Figure 47. The HTPTM design has
a specific shape at the rod-to-rod gap regions that directs the flow to enter or leave the subchannel.
In the FOCUSTM design the mixing vanes configuration (mirrored and rotated in 90 degree) leads to
coexistence of an intra-subchannel swirling flow and a crossflow meandering in opposite directions
within one subchannel.
A correct modeling of the directed crossflow would require detailed geometrical information
such as vanes length and orientation,
advanced mechanistic models for evaluation of the lateral flow rates specified by a change of
the axial velocity vector. An exception is the COBRA-IV code (Stewart, S. W. et al., 1977
130

Figure 46: Schematic of the HTPTM Spacer Figure 47: Schematic of the FOCUSTM Spacer
A very coarse approach is still used in the subchannel analyses: the cont of l
convection to the crossflow is approximated by artificially increasing the single-phase mixing
im
bun
in the medium and should not
depend on convective mechanisms.
must separate the treatment of the diffusive and the convective effects of the spacer grids.
ribution the latera
coefficient to calculate a crossflow with a magnitude sufficient to reproduce exper ental results of
the available mixing tests. In this way, the single-phase mixing coefficient combines the effects of
the turbulent diffusion and the forced convection by mixing devices or other discrepancies from the
dle symmetry. Such a methodology violates the physics behind the turbulent diffusion
approximation: the mixing rate is proportional to the gradients
To overcome the above discussed modeling deficiency, the new generation subchannel codes
131

6.2
The current version of F-COBRA-TF (as well as the PSU versions of COBRA-TF) does not
model the directed crossflow. To improve the code capabilities of simulating convective lateral
flows due to spacer grids in rod bundles, a new model based on CFD calculations was developed.
New F-COBRA-TF Model for Directed Crossflow by Spacer Grids
6.2.1 F-COBRA-TF Transverse Momentum Equations
In the variety of COBRA-TF code versions, including F-COBRA-TF, the lateral mass flow
rates are defined by solving the transverse momentum equations for each field: continuous liquid,
entrained liquid, and vapor.
Recalling Chapter 3, the generalized phasic momentum equation has the following form:
( ) ( ) ( ) Tkkkkkkkkkkkkkkk MMMPgUUU
t+++⋅∇+∇−=⋅∇+
∂τααραραρα (6.1)
where k
d∂ Γ
α is the average k-phase void fraction; kρ is the average k-phase density; kU is the average
k-phase velocity vector; g is the acceleration of gravity vector; k
τ is the average k-phase viscous
kstress tensor; ΓM is the average supply of m ntum to phase k due to mass transfer to phase k;
is the average drag force on phase k by the other phases; and is the average supply of
momentum to phase k due to turbulent mixing and void drift.
The F-COBRA-TF momentum equations are solved on a staggered mesh where the momentum
cell is centered on the scalar mesh cell boundary. The mesh cell for the transverse velocities is
shown in Figure 48. The finite-difference transverse momentum equations are given in Equations
6.2 through 6.4. Quantities that are evaluated at the old time carry the superscript . Donor cell
quantities that have th
ome
dkM T
kM
n
e superscript n are evaluated at the old time. ~
132

In the transverse momentum equations, the pressure force term and the velocities in the wall
and interfacial drag terms are new time values, while all other terms and variables are computed
using old time values. The rate of momentum efflux by transverse convection is given as the sum of
the momentum entering or leaving the cell through all transverse connections. M tum
convected by transverse velocities (that are in the direction of the transverse velocities being solved
for) is the sum of the momentum entering or leaving through mesh cell faces connected to the face
of the mesh cell for which the momentum equation is being solved. NKII is the number of mesh
cells facing the upstream face of the mesh cell and NKJJ is the number facing the downstream face
of convected out through the sides of the mesh cell by velocities that are
orthogonal to the velocity to be solved for, but lying in the same horizontal plane, is given by the
sum of the momentum convected into or out of cells connected to the sides of the transverse
momentum mesh cell. The number of cells connected to the mesh cell under consideration, whose
velocities are orthogonal to its velocity, is given by NG. The momentum convected through the top
and bottom of the mesh cell by vertical velocities is the sum of the momentum convected into (or
out of) cells connected to the top and bottom of the mesh cell and depends on the number of cells
onnected to the top (NKA) and bottom (NKB) of the mesh cell.
omen
the mesh cell. Momentum
c
Scalar Mesh Cell (II) Scalar Mesh Cell (JJ)
∆z
∆x
S
Vj NKII NKJJ
NKB
NKA
NG
Figure 48: F-COBRA-TF transverse momentum mesh cell
133

Vapor Phase ( ) ( )[ ]
( ) ( )[ ] ( ) ( )[ ] ( ) ( )
( ) ( )[ ] ( ) ( )[ ]
( ) ( ) ( )[ ]
( ) ( )[ ] ( )[ ]J
vapmom
J
Jn
entEn
liqEn
vapCnJentvapJentvapentvapi
nJliqvapJliqvapliqvapi
nvapvapvapwall
j
JJIIJJJJIIvap
j
NKA
IAlatIAvap
nvapvapvap
j
NKB
IBlatIBvap
nvapvapvap
J
NG
LJ
LL
onvap
nJvapvapvap
J
NKJJ
LJLL
nvap
nJvapvapvap
J
NKII
LJLL
nvap
nJvapvapvap
JJJvapvapvapvapvapvap
zS
zVVW
WWWWK
WWWWKWWKz
xSPP
z
AUW
z
AUW
z
xSWW
z
xSWW
z
xSWW
t
xSWW
J
J
JJJJ
IAIB
∆+
∆
Γ−Γ−−Γ−−−−−
−−−−−−∆
∆−−
∆−
∆+
∆
∆⎥⎦⎤
⎢⎣⎡
+∆
∆−
∆
∆+
=∆
∆−
−
==
===
∑∑
∑∑∑
)_()_,(
)_,(_
1
~
1
~
1
~
1
~
1
~
12
22)()(
2
ηη
α
ραρα
ραραρα
ραρα
(6.2)
Continuous Liquid Phase
n
( ) ( )[ ]
( ) ( )[ ] ( ) ( )[ ] ( ) ( )
( ) ( )[ ] ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
J
liqmomSJ)_(
Entrained Liquid Phase
J
Jn
liqEn
vapCnJliqvapJliqvapliqvapi
nliqliqliqwall
j
JJIIJJJJIIliq
j
NKA
IAlatIAliq
nliqliqliq
j
NKB
IBlatIBvap
nliqliqliq
J
NG
LJ
LL
onliq
nJliqliqliq
J
NKJJ
LJLL
nvap
nJliqliqliq
J
NKII
LJLL
nliq
nJliqliqliq
JJJ
nliqliqliqliqliqliq
z
zVW
WWWWKWWK
zxSPP
z
AUW
z
AUW
z
xSWW
z
xSWW
z
xSWW
t
xSWW
JJJJ
IAIB
∆+
∆
Γ−−Γ−−−−−+−−
∆
∆−−
∆−
∆+
∆
∆⎥⎦⎤
⎢⎣⎡
+∆
∆−
∆
∆+
=∆
∆−
−==
===
∑∑
∑∑∑
)_,(_
1
~
1
~
1
~
1
~
1
~
1122
)()(
2
ηη
αραρα
ραραρα
ραρα
(6.3)
( ) ( )[ ]
( ) ( )[ ] ( ) ( )[ ] ( ) ( )
( ) ( )[ ] ( ) ( )[ ]
( ) ( ) ( )[ ] [ ]
Jz∆entmom
J
Jn
entEn
vapCnJentvapJentvapentvapi
nentententwall
j
JJIIJJJJIIent
j
NKA
IAlatIA
nent
j
NKB
latIBentn
entliqent
J
NGLonn
J
NKJJ
L
nn
J
NKII
LJLL
nent
nJentliqent
JJentliqententliqent
Sz
VWWWWKWWK
zxSPP
z
AUW
z
AUW
xSWWxSWW
z
xSWW
xSWW
J
JJJJ
IAIB
+
∆
Γ−Γ−−−−+−
∆∆−
−∆
−∆
∆⎤⎡∆−
∆
∆+
∆−
−=
==
∑∑
∑∑∑
)_(
)_,(_
1
~
1
~
~~
1
~
22
)()(
ηη
αραρα
ραραρα
ραρα
(6.4) ententliq
IB+ =
LJLentJentliqentJLLentJentliqent
zz ∆
⎥⎦⎢⎣+∆
=11 2
J
n
t=
∆
W−
134

( )
The terms in the phasic transverse momentum equations can be described as follows:
( ) ( )
( ) ( )( )
( )( )
( ) ( ) ⎥⎦⎢⎣⎥⎦
⎢⎣
⎥⎦ zzvapentizzvapliqi A _,'''
_,τ( )
⎥⎦
⎤
⎢⎢⎢
⎣
⎡
+Γ+
⎥⎤
⎢⎡
⎤⎡
⎢⎣
⎥⎤
⎢⎡
∂−
−⎥⎤
⎢⎡
∂−
⎥⎤
⎢⎢⎢
⎣
⎡∂+
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤⎢⎡
∂∂
−−⎥
⎢⎢⎢
⎣∂
⎤⎡
∑
momkk
zzkwall
zkkkk
NG
oNGNG
okkkk
zkkkk
SWWbetwTransferMass
todueExchangeMomentumTransverse
ADropsandVaporbetweenDragIterfacial
A
PforceGradientessure
AUWVerticalbyEffluxMomentumTransverseofRate
AUWVerticalbyEffluxMomentumTransverseofRate
SWWConvectionTransverseOrthogonalbyEffluxMomentumTransverseofRate
zAWW
ConvectionSideJJ
TransversebyEffluxMomentumTransverseofRateAWW
A
MomentumTransverseofchangeofRate
Pr
''''''_ ττ
ρα
ραρα
ραρα
d at the beginning of the
current time step and are assumed to remain constant during the remainder of the time step. The
semi-implicit mom
+
⎥⎦
⎤⎢⎣
⎡+⎥
⎥STermSource
MomentumTransversefieldseen
±⎥⎥
⎢⎢
±⎥⎤
⎢⎡
−
⎥⎦
⎢⎣ ∂⎥
⎥⎦⎢
⎢⎣ ∂ zk
IA
LiquidContinuousandVaporbetweenDragIterfacialShearWallTransverse
LA
zaboveConvection )( α
⎥⎥⎦∂
IBzkkkk
zbelowConvection )(
⎢⎢⎣⎥
⎥⎦∂
− zkkkk
zConvectionSideII
⎤⎡
=⎥⎥⎥
⎦⎢⎢⎢
⎣ ∂∂ kkk
TransversebyEffluxMomentumTransverseofRatet
Wρα
The equations are solved first using currently known values for all variables to obtain an
estimate of the new time flow. All explicit terms and variables are compute
entum equations have the form:
entvapliq memdmcPbm &&&& +++∆= (6.5)
where vapliqliq mdmcPbam &&& 1111 ++∆+= ; entvapliqvap memdmcPbam &&&& 22222 +
a
++∆+= ;
and dPbam& 33 +∆+= entvapent mem && 33 + .
The constants a1, a2, and a3 (in represent the explicit terms such as momentum efflux skg / )
135

terms and the gravitational force; b1, b2, and b3 (in sm ⋅ ) are the explicit portion of the pressure
gradient force term; c1 and c2 (in ) are explicit factors that multiply the liquid flow rate in the
wall and interfacial drag terms; 2, d3, e2, and e3 (in ) are the corresponding terms that
multiply the vapor and entrained liquid flow rates.
The equations can be written in a matrix form as
(6.6)
and then solved by Gaussian elimination to obtain a solution for the phasic mass flow rates as a
function of the pressure gradient across the momentum cell,
2m
d1, d 2m
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∆−−∆−−∆−−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−
PbaPbaPba
m
m
m
ededc
dc
ent
vap
liq
33
22
11
33
222
11
101
01
&
&
&
P∆ :
(6.7a)
p ∆−= 22& (6.7b)
∆−= 3& c)
Phgmliq ∆−= 11&
Phgmva
m Phgent 3 (6.7
In regard to the new spacer grid model, the rate of change of momentum by directed crossflow
can be added to the coefficients a in Equation 6.5, which are calculated as
⎟⎠
⎜⎝ ∆∆
=ty
a , ⎞⎛ ∆∆ It (6.8)
where is the time difference (time step size),t∆ y∆ is the spatial difference (gap length), and tI
∆∆
is the change of momentum. Thus, the total rate of momentum change in transverse directions will
be modified as follows:
136

( ) [ ]
( ) ( )
( ) ( )( )
( )( )
( ) ( )
⎤
⎢⎢
⎡
±⎥⎥⎦⎢
⎢⎣
−
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
∂∂
−−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
∂∂−
⎥⎥⎦⎢
⎢⎣ ∂
+⎥⎥
⎦⎢⎢
⎣+
⎥
⎥
⎦
⎤
⎢
( )
⎦⎣⎥⎥⎦⎢
⎢⎢
⎣
⎡
+Γ+
⎥⎥⎦
⎤
⎢⎢⎣
⎡±
⎥⎥⎥
⎦
⎢
⎣
⎤⎡
⎥⎤
⎢⎡
∂⎤⎡
⎥⎢
⎥⎤
⎢⎡
+⎥⎤
MomentumTransversefieldsbetween
todueExchangeomentum
⎢
⎣−⎥⎢
⎢⎡
∂−
+
±=⎥⎥⎦
∂
momkk
zzvapentizzvapliqi
zk
kk
zkkkkzkkkk
STermSourceSWW
TransferMassMTransverse
ADropsandVaporbetweenDragIterfacial
A
ShearWallTransverse
A
essure
aboveConvection
WVerticalbyEffluxMomentumTransverseofRateOrthogonalbyEffluxMomentumTransverseofRate
ConvectionSideJJConvectionSideII
W
)(
)
ossflowDirectedCrbyEffluxMomentumTransverseofRate
'''_,
_,
τ
α
ρα
ρα
6.2.2 Ca
f the new methodology for CFD based subchannel modeling of the
directed crossflow the goal was to establish a model that: 1) represents the convective nature of the
phenomenon; 2) is simple and can be easily implemented into the subchannel momentum
equations; and 3) is effic
ach d re for
preliminary investigations. While the first two candidates utilize CFD predictions for the velocity
curl in a lateral plane for evaluation of the lateral momentum change, the third candidate uses CFD
pred
⎡
∂∂−
⎥
⎥
⎦
⎤
⎢⎣∂
∑
zzkwall
IAzkkkk
IBzkk
NG
oNGNG
okkkk
LiquidContinuousandVaporbetweenDragIterfacial
A
LP
forceGradient
zAUW
VerticalbyEffluxMomentumTransverseofRatez
AUbelowConvectionSWWConvectionTransverse
zAWW
TransversebyEffluxMomentumTransverseofRate
zAWW
TransversebyEffluxMomentumTransverseofRate
Pr
(
''''''
_ ττ
ρα
ρα
ραρα
⎥⎤
⎢⎢⎢
⎣
⎡
∂kkk
tA
MomentumTransverseofchangeofRate
lculation of the Transverse Momentum Change by Directed Crossflow
During the development o
ient in regard to the CPU time.
Three alternative modeling appro es (the so-called can idates) were conside d
iction for the lateral velocity. Based on performed comparative analyses the third candidate was
selected for further development since it performs with a high accuracy and is numerically stable.
137

Short descriptions of candidates 1 and 2 are given in Appendix D. The description of the third
method is following hereinafter.
Consider two fluid volumes, geometrically fully identical, connected to each other through a
gap with an area xSA ∆= (see Figure 49). The fluid in both volumes is at isothermal conditionsijlat
and is moving in axial direction x with a constant velocity inletUU ≡ . Assume that at given
elevation along the length there exits a force that results in a non-zero fluid velocity in the
lateral direction . Since, the model is constructed to avoid pressure and temperature gradients in a
lateral plane, the force can be defined as
, (6.9)
where
is the mass flow rate in direction equal to
F V
y
VmF lat&=
latm& y
latlat AVm ρ=& , (6.10)
where ρ is the fluid density.
Then, the force acting on the fluid in the gap region will be given as
(6.11)
and it is equal to the momentum change
latlat AVVmF ρ2== &
latI∆ in the lateral direction over a time interval y t∆ :
latlat
lat AVFt
II& ρ2=≡∆∆
= . (6.12)
Consider now a rod bundle of geometrically identical subchannels with uniform distribution of
the power and the inlet flow. Let obstacles exist in each subchannel and cause a change of the
138

velocity vectors, which results in a non-zero lateral flow. At such conditions the crossflows existing
in th
nfigurations in
fuel rod bundles - the coefficients a in Equation 6.8 can be corrected to account for the additional
momentum change as calculated by Equation 6.12. However, the lateral velocity predicted with
the
e bundle will be only due to velocity deflection on the obstacles. If we can predict in advance
the magnitude and the direction of the resulting lateral velocities, the above described model can be
used for prediction of the lateral momentum change due to specific mixing vane co
latI&
CFD code will account for the transverse pressure losses due to skin friction on the rods.
Therefore, action has to be taken either to correct the CFD results or to terminate the modeling of the
transverse friction pressure losses in the subchannel model.
ijSChannel i Channel j
x∆
y
x
flow
Figure 49: Schematic of two intra-connected fluid volumes
The subchannel analysis codes are not able to calculate such local changes in the velocity field.
Fortunately, we ca
n utilize the features of computational fluid dynamics to evaluate the lateral
139

velo
ted bundle correspond to ones used in the CFD calculations, the
forc
(6.13)
pre-calculations for each particular case to be simulated with the
subcha od axial velocity, which is
assu
w
u
c
l
c
m
city across the gaps between the adjacent subchannels.
Under the consideration that the inlet fluid velocity, the fluid density, and the area available for
lateral flow exchange in the simula
e to be added to the momentum equations of the subchannel code can be given as
CFDlat
CFDCFDCFDCFDlatSGlat AVVmF ρ2
_ )(== &
However, since the CFD calculations are costly in regard to the computational time, it is
inefficient to perform CFD
nnel c e. Moreover, the CFD calculations are performed at given
med to remain constant over the axial length. This is not the case of the subchannel analysis,
here not only the inlet velocity could be different form the one used in the CFD predictions, but it
sually varies along the axial length. Therefore, the model has to be made applicable to any flow
onditions to be simulated by the subchannel code, or in other worlds, the CFD predictions for the
ateral velocity have to be scaled to the actual subchannel conditions. The scaled lateral velocity *V
an be further used for calculation of the force SGlatF _ to be added to the subchannel code
omentum equation:
*_ Vm
tI
latSGlat ∆∆
The scaling involves the definition of the ratio of the lateral velocity as predicted by the CFD
ode and the inlet axial ve
F SCH&== (6.14)
c locity in the CFD model, the so-called spacer grid lateral convection
factor:
CFDinlet
CFD
UV
SGlatf =_ . (6.15)
140

It is dimensionless parameter that gives the information how the magnitude of lateral velocity
epends on the magnitude of the inlet velocity. The spacer grid lateral convection factor is a function
f the axial distance from the grid.
During the evaluation of the subchannel crossflow SCHm& , the F-COBRA-TF donor cell logic
d
o
and upwind discretization approach have to be taken into account.
Implying such a scaling procedure will reduce the required CFD pre-calculations to modeling of
the sample geometries only.
6.2.3 Verification of the Proposed Directed Crossflow Model
The functionality of the new model was verified against CFD simulations. A 2×2 channels
model of FOCUSTM spacers was developed at AREVA NP GmbH. It consists of four geometrically
identical subchannels arranged in a 2×2 array. The fluid in all four subchannels is water at
temperature of 300 °C and inlet axial velocity of 5 m/s. There are no heated walls. The fluid
properties remain constant along the axial length. The spacer grid configuration is such that each
subchannel contai ate intra-channel
wirl downstream of their top edges and directed crossflow between adjacent subchannels with
meandering patterns. The mixing vanes configuration is shown in Figure 50. 3D views of the
FOCUSTM spacer is given in Figure 51. The chosen fluid conditions assure no diffusive effects due
temperature gradient and therefore lateral flows are driven only by convective processes. The model
is summarized in Table 7.
In total four CFD calculations were performed, in which the mixing vane angle varied from 10
to 40 degree. The lateral (UW) velocities were extracted at every 10 mm axial distance. The CFD
results for flow distribution -3 of Appendix E. It was
lat
ns a pair of two rotated and mirrored mixing vanes, which cre
s
are given in Table E-1 through Table E
141

observed that immediately downstream of the grid the lateral flow structures exhibit swirling flow
created by the m
neighboring subchannels are rotating in opposite directions and thus creating a crossflow through
the gaps. The magnitude of the swirl, and respectively the magnitude of the crossflow, is decreasing
further downstream of the spacer. Larger is the mixing vane angle, stronger is the crossflow.
ixing vanes. Because the mixing vanes were mirrored, the swirls in any two
Figure 50: Mixing vanes configuration in the 2×2 FOCUSTM model
Figure 51: 3D views of the FOCUSTM spacer
142

Table 7: Description of the 2x2 channels model used in the STAR-CD calculations
rod diameter 9.5 mmpitch 12.7 mm
Inlet velocity
Thermal Hydraulic Analyses of Flow and Heat TransferCoupled Subchannel Analyses
to study flow distribution with cross flownet mass transfer between the subchannels by directed crossflow
Characterization of Runcoupled 2 x 2 subchannelschannels with equal inlet velocities and temperaturesmirrord and rotated mixing vanes
Objective
length 540 mm5 m/s
strip thickness of 0.4 mm, vane angle 10°, 20°, 30°, and 40°
Specific heat 4457,3333 J/kg/K
Discretization Upwind
STAR-CD Calculation
Model
Outlet Outlet / Pressure conditionGaps between rods symmetry conditionWalls no-slip, adiabatic, smoothTemperature at inlet 300°CTurbulence at inlet Intensity 5%, length 2 mmDensity 727.46 kg/m³Lam. Viscosity 8.8688e-5 kg/m/sThermal conductivity 0.56 W/m²/K
Solver Simple, CG + AMG
Accuracy 0.0001Turbulence standard k-ε, wall fucnctiontypical cell dimension 0.3 mm
Method
Properties
Boundary Conditions
From the axial distribution of the lateral velocities, shown in Figure E-1 through Figure E-4 of
Appendix E, it is seen that for small declination angles (10 degrees) lateral velocities through all the
gaps are equal in magnitude and have same distribution over the axial length. However, for the
larger angles the distribution is not longer symmetrical. Lateral velocities through the east and south
gaps have similar qualitative and quantitative behavior. One very interesting finding is the change
of the velocity direction (sign) at 30/36 hydraulic diameters downstream of the mixing vanes.
Lateral velocities through the west and north gaps also have similar magnitude and axial
distribution, but there is no change of the sign. Table E-2 and Table E-3 of Appendix E show the
143

lateral velocity field further downstream of the spacer. The asymmetry effect might be caused by a
migration of the swirling flow away from the center of the subchannel when the flow is developing
downstream of the vanes. For example (Table E-2), in the north-east and south-east subchannels the
centers of swirling flow move away from the east gap leading to less crossflow through it. At the
same time, in the north-west and the north-east gap the swirls move toward the north gap and thus
creating crossflow through that gap. Nevertheless that such an effect might be characterized as a
numerical problem of the CFD calculations, very similar experimental results were reported by
Conner (Conner, M. E. et al., 2004).
As above mentioned, the axial distributions of the lateral velocity over one spacer grid span
were not symmetrical for large declination angles. However, for the following studies the lateral
velocities w
The CFD predictions for the lateral velocity and the lateral mass flux are shown in Figure 52 and
Figure 53. The lateral convection factors , evaluated with Equation 6.15, are plotted in
Figure 54. In these figures the length is extended to 3 m, which corresponds to the heated length of
the 5×5 rod bundle with FOCUSTM spacer, which will be used later for validation of the model.
There are five spacer grids instrumented along the length as depicted in Figure 55.
ere averaged over the four gaps and a single value was used in the performed analyses.
SGlatf _
144

Lateral VelocityCFD
0,00
0,25
0,50
0,75
1,00
1,25
1,50
1,75
2,00
0,0 0,5 1,0 1,5 2,0 2,5 3,0 3,5
Axial elevat on, mi
Velo
city
, m/s 10 deg
20 deg30 deg40 deg
Figure 52: CFD predictions for the lateral velocity for different mixing vane angles
Lateral Mass FluxCFD
0
250
500
750
1000
1250
1500
0.0 0.5 1.0 1.5 2.0 2.5 3.0
Axial elevation, m
Mas
s flu
x, k
g/m
2 s
10 deg20 deg30 deg40 deg
Figure 53: CFD predictions for the lateral mass flux for different m xing vane angles i
145

146
Lateral Convection Factor
0.2
0.4
lat_
conv
0.0
0.1
0.3
0.0 0.5 1.0 1.5 2.0 2.5 3.0
Axial position, m
F, -
10 deg20 deg30 deg40 deg
Figure 54: Lateral convection factor for different mixing vane angles
Figure 55: Schematic of the spacers positions in the 5x5 bundle with FOCUSTM spacer
3 m
EOHL
BOHL0.275 m
0.545 m
0.545 m
0.545 m
0.04 m
0.545 m

The data exchange between the CFD code and the subchannel code is similar to one described
in Section 5.3.4. An interface module was developed, which 1) contains detailed information for the
lateral convection factor in a 2D table format; 2) contains additional information for the orientation
of the directed crossflows in regard to the global coordinate system; and 3) maintains the exchange
between the CFD data base and F-COBRA-TF. Again, for the purposes of routine safety analyses,
the code can be supplied with sets of data representing spacer designs that are currently used. For
new design studies, an “experienced” user can create a new data set based on more recent CFD
calculations.
The flow chart of the directed crossflow modeling and examples for the obtained CFD data sets
of the lateral convection factor are given in Appendix F.
F-C t. The
predicted lateral velocity and mass flux are shown in Figure 56 and Figure 57. It can be seen that
the proposed methodology is able to reproduce the axial variation of the lateral mass flux between
the adjacent subchannels in both qualitative and quantitative manners.
The obtained results demonstrate the functionality of the proposed methodology and therefore
the model was implemented in the latest version F-COBRA-TF for simulation of directed crossflow
created by different velocity deflectors. The validation of the new modeling is presented in the next
section.
OBRA-TF simulations of the 2×2 channel model of FOCUSTM spacer were carried ou
147

Lateral VelocityF-COBRA-TF
0,00
0,25
0,0
0,50
1,00
2,00
0,5 1,0 1,5 2,0 2,5 3,0 3,5
Axial elevation, m
loci
t
1,25
1,50
1,75
y,m
/s 10 deg20 deg30 deg40 deg0,75Ve
Figure 56: F-COBRA-TF predictions for the lateral velocity for different mixing vane angles
Lateral Mass FluxF OBRA-TF
1000
1250
1500
/m2 s
-C
s f
g
0
250
500
750
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5
Axial elevation, m
Mas
lux,
k
10 deg20 deg30 deg40 deg
the lateral mass flux for different mixing vane angles
Figure 57: F-COBRA-TF predictions for
148

6.2.4 Validation of the Proposed Directed Crossflow Model
experiments performed with SIEMENS Test Section 53 (DTS53) were used for
validation of the proposed model. The tests were conducted at the Columbia University, New York
in 1990 for SIEMENS KWU (AREVA NP GmbH) PWR test section TDS53. The bundle
d easured data for are available in Vogel, Chr. et al., 1991.
ption of the DTS53 Ex
Mixing
escription and m
6.2.4.1 Descri periment
In total twenty-one tests were performed in a 5×5 rod bundle array. The bundle geometry is
s le 8.
ution was no xteen peripheral rods had a relative power
0.94 and the nine internal rods had a relative power of 1.11. The axial power distribution was
ve d
e bund equipped CUSTM s rids with inlet edges dimples,
a agonal nted spring trips have ss of 0.45 nd height o m. Split
m vane attached a per edge o rip. Ther e spacers a e heated
l equidi distributed span of 54 see Figur
e exp tal data i exit subc fluid tem es in a 6× trix and
differential pressure drop me nts. The nties of erature measurements are
r d bein een 0.61 a for the a temperatu e range of 2 o 343 ºC
( tti, C. 1990). If t asured tem re by 5
d s, it w t to a nega alue in th base. The total error in ab pressure
m rements is reported being ± 0.41 bars.
ummarized in Tab
The radial power distrib nuniform: the si
of
uniform l c. The operationa onditions are gi n in Table 9 an Table 10.
Th le was with FO pacer g straight , oval
nd di ly orie s. The s thickne 3 mm a f 40 m
ixing s were t the up f the st e are fiv long th
ength stantly with a 5 mm ( e 55).
Th erimen nclude hannel peratur 6 ma
asureme uncertai the temp
eporte g betw nd 1.0 K bsolute re in th 05 ºC t
Fighe et al., he me perature exceeded the saturation temperatu
egree as se tive v e data solute
easu
149

Table t section DTS53
Pa
8: Geometrical characteristics of tes
rameter Value Lattice 5×5 Number of heater rods 25 Number of guide tubes 0 Pitch, m 0.0127 Heater rod outside diameter, m 0.0095 Heated length, m 3 Rod to wall clearance, m 0.00314 Corner radius, m 0.0004 Bundle flow area, m2 0.0026607
Table 9: Range of conditions for test section DTS53
Parameter Range Exit pressure, bar 159.2 ÷ 160.6 Fluid inlet temperature, ºC 203.6 ÷ 282.1 Average mass flux, kg/m2-s 3546.4 ÷ 3655.7 Bundle power, kW 1162.9 ÷ 4620.9
Table 10: Tests operational conditions
Test Inlet Flow Rate, kg/s
Inlet Enthalpy, kJ/kg
Bundle Power, kW
Exit Pressure, bars
Inlet Temperature, ºC
08.0 9.619 1238.7 3005.6 159.60 281.2 09.0 9.518 1239.6 3053.0 159.90 281.4 10.0 9.501 1241.6 3043.6 159.60 281.8 11.0 9.654 1238.4 2123.8 159.60 281.2 12.0 9.663 1236.2 2126.8 159.60 280.7 13.0 9.689 1234.3 2137.7 159.20 280.3 14.0 9.564 1240.4 1162.9 159.60 281.5 15.0 9.587 1239.7 1168.6 160.60 281.4 16.0 9.727 1089.9 2695.3 160.30 250.8 17.0 9.693 1078.8 2624.5 159.90 248.4 18.0 9.618 1084.2 2621.3 160.60 249.6 19.0 9.436 1079.9 2807.0 159.60 248.7 20.0 9.574 1080.6 3798.6 159.90 248.8 21.0 9.563 1090.1 3784.2 160.60 250.8 22.0 9.559 887.4 2976.0 159.60 206.5 23.0 9.566 887.5 2957.7 159.60 206.5 24.0 9.580 877.5 2944.3 159.90 204.3 25.0 9.502 889.2 3711.6 160.60 206.9 26.0 9.551 886.5 4620.9 159.90 206.3 27.0 9.659 1077.4 4470.9 159.90 248.1 28.0 9.585 1094.3 4435.1 160.30 251.7
150

6.2.4.2 F-COBRA-TF Model
F-COBRA-TF model of the 5×5 bundle was developed. It is a full bundle model that consists of
36 subchannels, each divided into 75 equidistant axial nodes of 40 mm height. Geometrical
characteristics are given in Table 11.
A schematic of the model is shown in Figure 58 and the mixing vanes arrangement and
me
Inlet boundary conditions of flow rate and enthalpy and exit boundary conditions of pressure
are applied.
The spacer gr odeled as velocity head rtical flow. An average value
of 1.12 for the p cification, is applied to all
subchannels.
Experimental conditions and the bundle geometry ar result in a lateral mass flux
caused by 1) turbulent mixing due to density and void fraction gradients; 2) diversion crossflow due
to lateral pressur low due to velocity deflection on the mixing
vanes surfaces.
Turbulent mixing is modeled using a single-phase icient, as predicted with the
correlation by Ro T. and R. G., 1972) and Beus’ model
(Beus, S. G., 1970 mix
The directed crossflow model requires additional input information for the orientation (sign) of
the directed crossflow. The F-COBRA-TF logic for lateral flows assumes a positive flow from a
low-numbered subchannel to a high-numbered subchannel. If the crossflow has an opposite
direction it is considered negative. Therefore the orientation of the directed crossflow created by the
andering flow patterns established in the bundle are illustrated in Figure 59.
ids effects are m losses in a ve
ressure loss coefficient, as provided in the tests spe
e expected to
e gradients; and 3) directed crossf
mixing coeff
gers and Rosehart (Rogers, J. Rosehart,
) for enhanced two-phase turbulent ing.
151

mixing vanes has to be specified in advance. This information is supplied by an additional input file
(dirct_data.inp in Figure F-1 of Appendix F). A negative sign following the gap numbers in Figure
58 indicates that the crossflow is directed from a high-numbered subchannel to a low-numbered
subchannel, and vise versa, a positive sign indicate at the crossfl is directed from a low-
numbered subchannel to a high-numbered subchannel.
Another required input is the declination angle of the mixing vanes. For the FOCUSTM spacer it
is 22 degrees.
Table 11: Geometrical characteristics of the F-COBRA-TF model
Corner Subchan
s th ow
nel Flow area, m2 0 4496 .00004Wetted perimeter, m 0.021985442 Gap width to side subchannel, m 0.00314 Gap length to side subchannel, m 0.010295 Side Subchannel Flow area, m2 0.000064762 Wetted perimeter, m 0.027622565 Gap width to corner subchannel, m 0.00314 Gap length to corner subchannel, m 0.010295 Gap width to side subchannel, m 0.00314 Gap length to side subchannel, m 0.012700 Gap width to internal subchannel, m 0.00320 Gap length to internal subchannel, m 0.010295 Internal Subchannel Flow area, m2 0.000090408 Wetted perimeter, m 0.029845130 Gap width to side subchannel, m 0.00320 Gap length to side subchannel, m 0.010295 Gap width to internal subchannel, m 0.00320 Gap length to internal subchannel, m 0.012700
152

2 - 4 + 6 - 8 + 10
1 + 3 - 5 + 7 - 9 + 11
1 2
12 -42 -
41 + 43 - 13 +
14 +
16 -
17 +
18 +
20 -22 +
48 -
24 -
50 +
26 +
52 -
28
30 -
31 + 53 -
34 -
35 +
36 +
37 +
38 -
39 -
40 +
44 -56 +
- 46 +
51 + 49 - 47 -
15 -33 -
32 +
45 + 55 +
54 - 60
19 -21 - 23 + 25 -27 + 29
3 4 5 6
7
8
9
10
1112131415 16
17
18
19
20 21 22 23 24
25
26
27282930
31
32 33 34
3536
1 2 3 4 5
16 17 18 19 6
14 22 8
15 24 25 20 7
23 21
13 12 11 10 9
58 -
Figure 58: Schematic of the F-COBRA-TF 5×5 model of DTS53 mixing test bundle
59 - 57 +
Figure 59: Mixing vanes arrangement and meandering flow patterns in the 5x5 bundle with FOCUS spacer
TM
153

6.2.4.3 F-COBRA-TF Results
calculations of the TDS53 experiments were carried out utilizing four different
mo
F-COBRA-TF
deling options:
OPTION 1:
The spacer grid effects are modeled by pressure losses in a vertical flow. A pressure loss
coefficient of 1.12 is applied to all subchannels.
The turbulent mixing is modeled with the correlation by Rogers and Rosehart for the single-
phase mixing coefficient (Rogers, J. T. and Rosehart, R. G., 1972) and Beus’ model for two-phase
mixing (Beus, S. G., 1970).
OPTION 2:
The spacer grid effects are modeled by pressure losses in a vertical flow and a directed
cro
The turbulent mixing is modeled with the correlation by Rogers and Rosehart for the single-
pha
OPTION 3:
ssflow modeled for all the gaps. A pressure loss coefficient of 1.12 is applied to all subchannels.
se mixing coefficient (Rogers, J. T. and Rosehart, R. G., 1972) and Beus’ model for two-phase
mixing (Beus, S. G., 1970)
The spacer grid effects are modeled by pressure losses in a vertical flow and a directed
crossflow modeled for the internal gaps only (gaps between internal subchannels). A pressure loss
phase mixing coefficient (Rogers, J. T. and Rosehart, R. G., 1972) and Beus’ model for two-phase
coefficient of 1.12 is applied to all subchannels.
The turbulent mixing is modeled with the correlation by Rogers and Rosehart for the single-
154

mix
OPTION 4:
ing (Beus, S. G., 1970).
The spacer grid re modeled by pre oss
coefficient of 1.12 is applied to all subchannels.
The turbulent mixing is modeled by a single-phase mixing coefficient of 0.04, which is a value
found by fitting the COBRA 3CP res
The reason for introducing Option 3 is that the CFD data for the lateral velocity were evaluated
only for the particular configuration of 2×2 array of identical subchannels. In our case, 5×5 bundle,
those correspond to the four central subchannels. There is no CFD data currently available for the
other geometrical c tions found in the s els,
side-to-side subchannels, and corner-to-side subchannels).
The reason for introducing Option 4 is to compare the results obtained with the new model to
the ones obtained with the current a
An automatic procedure, the so-called 5×5 mixing test matrix, for input decks generation, code
ation was created for the DTS53 mixing
exp
The F-COBRA-TF predictions for the mixture temperature at the subchannels exits were
compar ch test point (the so-called run) the mean values and the
standard deviations of the absolute temperature difference
effects a ssure losses in a vertical flow. A pressure l
ults to the experimental data.
onfigura imulated 5×5 bundle (internal-to-side subchann
pproach used in AREVA NP GmbH.
execution, and extraction of the necessary output inform
eriments.
ed to the measured data. For ea
expTTcalc − and the temperature
differen along the heated lengthce relative to the temperature rise inoutcalc
TTTT
expexp
exp
−
− were calculated as
follows:
155

Mean value of the absolute temperature differences absnT∆ :
N
TT
N
n
absn
abs∑=
∆=∆ 1 , where
ncalcabs
n TTT exp−=∆ (6.18)
Standard deviation of the absolute temperature differences absnT∆ :
( )∑=− nN 1
∆−∆=N
n
absabsabs TT1
21σ (6.19)
Mean value of the relative temperature differences relnT∆ :
NT nrel
Tn∑N
=
∆
n
=∆ 1 , where inoutcalcrel
n TTT exp
−=∆ (6.20)
Standard deviation of the relative temperature differences
TT
expexp
−
relnT∆ :
( )∑ ∆−∆=
= relrel TTσ (6.21)
Statistical analyses were performed for four data sets:
1) All subchannels;
ll internal subchannels;
−
N
nnN 1
2
11
where n is the number of analyzed test points (runs).
2) Peripheral subchannels only;
3) A
4) Four central subchannels only.
Results are given in Table 12 through Table 19. Table 20 shows the temperature differences
156

( )isubchannelcalc TT
_exp− for each subchannel i averaged over the calculated test points. There is no
value given for the first subchannel, because only two measured points are available for this
subchannel. Results can be summarized as follows:
1. The original F-COBRA-TF models, which do not simulate the change in the lateral
momentum due to velocity deflection, mispredict the fluid temperature distribution at the bundle
exit with 3.5 ºC in average. There is a strong overprediction for the central region of the bundle and
und
2. Applying an additional force calculated by Equation 6.14 to the all lateral momentum cells,
regardless of their location in the computational domain (Option 2), results in an improvement of
the
At the same time, there is an impressive improvement for the central subchannels: the mean
erprediction for the peripheral region. This is an indication that the lateral transfer is
underestimated by the code: the fluid surrounding the more heated rods in the central region is not
redistributed to the less heated peripheral subchannels.
overall prediction, but not for the peripheral region, where the calculated fluid temperature
becomes significantly overpredicted. In other words, the hotter fluid from the central part is
overforced to the bundle periphery. These results are not unexpected. We have applied a force,
which was calculated using lateral convection factor derived from CFD pre-calculations for
geometry corresponding to four central subchannels, to a very different configuration of adjacent
subchannels.
value of the absolute temperature differences is reduced from 6.8ºC in average to only 1.7ºC in
average.
3. Learning the lesson from the above discussed results, in the third set of evaluations (Option
3) the force was applied only to the gaps connecting internal-to-internal subchannels. Since, there
157

are no CFD pre-calculations for the corner-to-side, side-to-side, and side-to-internal subchannels
configurations, no force was applied to those gaps. Of course, this is not a truly physical approach,
incorrectly calculated rates of transverse momentum change will be not
applied to the subchannel equations. As it was expected, the re o significan
th red al nels he O
agreement with the expe ata pe bch is .
4 In the f set of luations ption 4 mode approa sed by EVA
GmbH for simu n of the DTS53 experiments was utilized: the crossf effects were mode
by a nhanced xing co ient of 4 for b single- two-ph flow c tions; t
value was found by fitting the COBRA 3CP results to the exp ental da t can b n that t
approach gives rse agr experim al data paring to Option 3.
T validati f the p sed mo g of di d cros in rod dles ag t AREV
NP GmbH DTS53 mixing experiments shows very promisin sults. N rtheles t the n
model was partially applied, due to the lack o l set o D dat alread ves be
repr tation o e flow ibution de rod dles th e rece used m dology
simu ng convective later ansfers with an en ed turb t mixing. This ind s that
ts, tu ent ixing and convective mixing, have to be modeled separately in the
momentum equations of the subchannel codes.
Additionally, the computational performance and efficiency of the modified code version was
investigated. Comparisons of the code temporal convergence are given in Figure 60. It can be seen
that the new model does not result in a prolonged CPU time.
Performed stability analyses showed no distortions in the code convergence on mass and heat
but it will assure that
sults show n t change in
e code p ictions for the intern and central subchan , as compared to t ption 2, but the
rimental d for the ripheral su annels improved
. orth eva (O ) the ling ch u AR NP
latio low led
n e mi effic 0.0 oth and ase ondi his
erim ta. I e see his
a wo eement with the ent com
he on o ropo delin recte sflow bun ains A
g re eve s tha ew
f ful f CF a, it y gi tter
esen f th distr insi bun an th ntly etho of
lati al tr hanc ulen icate the
two effec rbul m
158

balance due to the new modeling (Figure 61 and Figure 62).
Table 12: Statistical analyses for da and standard deviation of absolute temperature differences
Number Original F-COBRA- D h All Crossflow through
era TF Models,
ta set 1: all subchannels. Mean value
Run OPTION 1
TF Models
OPTION 2 irected Crossflow
throug Gaps
OPTION 3 No Directed
Periph l Gaps
OPTION 4 Original F-COBRA-
β = 0.04
Mean Value Deviation Value Deviation Value Deviation Value Deviation
Standard Mean Standard Mean Standard Mean Standard
8 3.5 2.7 2.9 2.1 2.5 2.1 2.6 1.8 9 3.3 2.4 2.9 2.1 2.5 1.9 2.6 1.9
10 3.6 2.5 3.1 2.4 2.7 2.3 3.0 2.1 11 2.3 1.6 2.2 1.6 1.8 1.5 2.0 1.5 12 2.3 1.7 2.2 1.6 1.8 1.5 2.0 1.5 13 2.3 1.6 2.1 1.5 1.7 1.4 1.9 1.4 14 1.6 1.1 1.6 1.4 1.4 1.1 1.5 1.3 15 1.5 1.1 1.4 1.2 1.2 1.0 1.3 1.2 16 3.1 2.2 3.2 1.9 2.7 1.7 2.9 1.8 17 3.3 2.0 2.9 1.9 2.5 1.8 2.7 1.8 18 3.4 2.0 2.9 2.0 2.5 1.9 2.7 1.7 19 4.1 2.6 3.2 2.3 2.9 2.1 3.0 2.0 20 4.0 2.9 3.5 1.9 2.9 1.8 3.2 1.5 21 4.1 2.9 3.5 1.9 2.9 1.7 3.3 1.6 22 4.4 3.0 3.5 2.3 2.9 2.3 3.2 2.1 23 4.2 2.9 3.8 2.5 3.2 2.4 3.5 2.1 24 4.1 2.8 3.8 2.4 3.2 2.3 3.5 2.1 25 4.9 3.5 4.0 2.3 3.3 2.3 3.8 2.0 26 5.4 4.0 4.4 2.2 3.6 2.4 4.1 2.0 27 5.5 3.6 4.1 2.5 3.5 2.4 4.1 2.0 28 5.4 3.6 4.2 2.7 2.6 2.4 3.7 4.2
average 3.6 3.1 2.7 2.9
159

T n
o
able 13: Statistical analyses for data set 2: peripheral subchannels only. Mean value and standard deviatio
f absolute temperature differences
Run Number
OPTION 1 Original F-COBRA-
TF Models
OPTION 2 Directed Crossflow through All Gaps
OPTION 3 No Directed
Crossflow through Peripheral Gaps
OPTION 4 Original F-COBRA-TF Models, β = 0.04
Mean Value
Standard Deviation
Mean Value
Standard Deviation
Mean Value
Standard Deviation
Mean Value
Standard Deviation
8 2.2 1.4 3.9 2.2 3.1 2.4 3.2 2.0 9 2.5 1.6 3.7 2.4 3.0 2.4 3.1 2.3
10 2.6 1.5 4.1 2.7 3.4 2.8 3.5 2.6 11 1.8 1.3 2.9 1.8 2.3 1.8 2.5 1.7 12 2.1 1.6 2.9 1.7 2.3 1.8 2.5 1.7 13 2.1 1.5 2.7 1.7 2.1 1.7 2.3 1.7 14 1.3 0.9 2.1 1.6 1.7 1.3 1.8 1.5 15 1.4 1.0 1.9 1.4 1.6 1.2 1.7 1.3 16 3.0 2.3 3.7 2.1 3.0 2.0 3.2 2.1 17 3.1 2.0 3.6 2.2 2.8 2.2 3.0 2.1 18 3.1 1.7 3.5 2.4 2.8 2.5 3.0 2.1 19 3.0 1.3 3.9 2.7 3.0 2.4 3.2 2.2 20 3.4 2.5 3.8 1.9 2.6 2.0 3.1 1.5 21 3.7 2.9 3.8 1.9 2.7 1.8 3.2 1.5 22 3.5 2.1 3.9 2.6 3.0 2.4 3.2 2.2 23 3.7 2.2 4.5 2.9 3.4 2.7 3.8 2.5 24 3.6 2.3 4.4 2.8 3.4 2.7 3.7 2.4 25 4.4 3.0 4.2 2.6 3.0 2.3 3.6 2.0 26 4.7 3.4 4.6 2.0 2.8 2.0 3.6 1.5 27 4.1 2.6 4.8 2.7 3.5 2.6 4.0 2.2 28 3.8 2.3 4.6 2.9 3.5 2.5 3.8 2.2
average 3.0 3.7 2.8 3.1
160

Table 14: Statistical analyses for data set 3: internal subchannels. Mean value and standard deviation of
absolute temperature differences
Run Number
OPTION 1 Original F-COBRA-
TF Models
OPTION 2 Directed Crossflow through All Gaps
OPTION 3 No Directed
Crossflow through Peripheral Gaps
OPTION 4 Original F-COBRA-TF Models, β = 0.04
Mean Value
Standard Deviation
Mean Value
Standard Deviation
Mean Value
Standard Deviation
Mean Value
Standard Deviation
8 4.9 3.1 1.8 1.1 1.8 1.3 2.0 1.4 9 4.2 2.8 1.8 0.8 1.8 0.8 2.0 0.9
10 4.8 3.0 1.9 1.2 1.8 1.3 2.3 1.3 11 2.8 1.9 1.2 0.8 1.2 0.8 1.3 0.9 12 2.6 1.9 1.2 0.6 1.2 0.6 1.3 0.7 13 2.5 1.7 1.3 0.7 1.2 0.7 1.3 0.7 14 2.0 1.1 1.0 0.8 1.1 0.7 1.0 0.8 15 1.5 1.1 0.9 0.7 0.9 0.6 0.9 0.7 16 3.3 2.1 2.6 1.6 2.5 1.3 2.5 1.3 17 3.5 2.2 2.2 1.3 2.2 1.1 2.2 1.2 18 3.8 2.3 2.2 1.2 2.2 1.1 2.3 1.1 19 5.2 3.0 2.6 1.8 2.7 1.9 2.9 1.9 20 4.5 3.2 3.3 1.9 3.1 1.8 3.4 1.5 21 4.4 3.0 3.3 2.0 3.1 1.7 3.4 1.6 22 5.2 3.5 3.0 2.0 2.9 2.4 3.2 2.1 23 4.7 3.4 3.1 1.8 2.9 2.0 3.2 1.7 24 4.7 3.3 3.2 1.7 3.0 2.0 3.2 1.7 25 5.5 3.9 3.8 2.2 3.7 2.4 3.9 2.0 26 5.9 4.4 4.3 2.5 4.2 2.6 4.4 2.3 27 6.7 4.1 3.5 2.0 3.5 2.2 4.1 1.8 28 6.7 4.1 3.9 2.5 3.9 2.7 4.5 2.6
average 4.3 2.5 2.4 2.6
161

abso ces
Table 15: Statistical analyses for data set 4: central subchannels only. Mean value and standard deviation of
lute temperature differen
Run Number
OPTION 1 Original F-COBRA-
TF Models
OPTION 2 Directed Crossflow through All Gaps
OPTION 3 No Directed
Crossflow through Peripheral Gaps
OPTION 4 Original F-COBRA-TF Models, β = 0.04
Mean Value
Standard Deviation
Mean Value
Standard Deviation
Mean Value
Standard Deviation
Mean Value
Standard Deviation
8 8.6 1.4 1.3 0.6 1.5 0.8 2.0 1.4 9 7.5 1.7 1.3 0.6 1.3 0.6 1.7 1.4
10 8.1 1.6 1.2 0.8 1.3 1.0 2.7 1.5 11 4.7 1.0 0.7 0.2 0.7 0.3 0.9 0.8 12 4.7 1.2 0.8 0.2 0.8 0.3 1.0 0.9 13 4.4 0.9 0.7 0.5 0.6 0.5 0.7 0.6 14 2.9 0.9 0.7 0.3 0.7 0.4 0.7 0.7 15 2.6 0.9 0.7 0.3 0.6 0.3 0.5 0.6 16 5.0 2.0 1.8 1.4 1.8 1.2 1.4 1.0 17 5.4 1.9 1.5 1.1 1.4 1.0 1.3 1.0 18 6.0 1.9 1.3 1.0 1.3 1.0 1.6 1.1 19 8.0 1.6 1.4 0.9 1.6 1.2 2.4 1.5 20 7.2 3.0 2.1 2.1 2.0 2.0 2.2 1.6 21 7.2 2.9 2.0 1.9 2.0 1.8 2.0 1.6 22 8.2 2.7 1.9 1.1 1.9 1.4 2.4 1.8 23 7.6 2.5 1.8 1.1 1.8 1.2 2.2 1.3 24 7.2 2.8 2.1 1.4 2.1 1.3 2.1 1.6 25 8.5 3.4 2.4 2.2 2.3 2.1 2.5 1.9 26 9.2 4.3 3.2 3.0 3.1 2.9 3.0 2.6 27 10.2 2.5 2.0 1.5 2.4 1.9 4.0 2.4 28 9.8 2.3 3.1 2.0 3.7 2.1 5.1 2.2
average 6.8 1.7 1.6 2.0
162

Table 16: Statistical analyses for data set 1: all subchannels. Mean value and standard deviation of relative
temperature differences
Run Number
OPTION 1 Original F-COBRA-
TF Models
OPTION 2 Directed Crossflow through All Gaps
OPTION 3 No Directed
Crossflow through Peripheral Gaps
OPTION 4 Original F-COBRA-TF Models, β = 0.04
Mean Value
Standard Deviation
Mean Value
Standard Deviation
Mean Value
Standard Deviation
Mean Value
Standard Deviation
8 6.9% 5.1% 6.1% 4.7% 5.4% 4.6% 5.6% 4.0% 9 6.3% 4.4% 5.8% 4.7% 5.0% 4.3% 5.2% 4.2%
10 7.0% 4.7% 6.4% 5.5% 5.6% 5.3% 6.1% 4.9% 11 6.2% 4.3% 6.3% 5.3% 5.4% 4.9% 5.8% 4.8% 12 6.2% 4.4% 6.1% 5.0% 5.3% 4.8% 5.6% 4.7% 13 6.0% 4.2% 5.8% 4.9% 4.9% 4.4% 5.3% 4.5% 14 8.1% 5.5% 8.6% 8.9% 7.7% 7.2% 8.0% 8.3% 15 7.2% 5.1% 7.5% 7.7% 6.4% 6.1% 6.9% 7.1% 16 6.0% 4.0% 6.3% 4.2% 5.4% 3.7% 5.7% 3.9% 17 6.4% 3.8% 5.9% 4.4% 5.1% 4.1% 5.4% 4.0% 18 6.7% 3.9% 5.9% 4.6% 5.2% 4.4% 5.4% 3.8% 19 7.6% 4.6% 6.1% 4.8% 5.5% 4.3% 5.8% 4.2% 20 5.5% 4.0% 4.9% 2.7% 4.0% 2.6% 4.5% 2.1% 21 5.6% 4.0% 4.9% 2.7% 4.0% 2.4% 4.5% 2.1% 22 6.9% 4.8% 5.6% 4.0% 4.8% 4.0% 5.2% 3.7% 23 6.6% 4.5% 6.1% 4.5% 5.2% 4.2% 5.7% 3.8% 24 6.5% 4.4% 6.2% 4.3% 5.2% 4.2% 5.6% 3.7% 25 6.2% 4.4% 5.1% 3.1% 4.3% 3.1% 4.8% 2.7% 26 5.7% 4.1% 4.8% 2.2% 3.9% 2.5% 4.3% 1.9% 27 6.6% 4.4% 5.1% 3.2% 4.3% 3.1% 5.1% 2.6% 28 6.7% 4.5% 5.4% 3.6% 4.7% 3.5% 5.3% 3.2%
average 6.5% 5.9% 5.1% 5.5%
163

T n
o
able 17: Statistical analyses for data set 1: peripheral subchannels only. Mean value and standard deviatio
f relative temperature differences
Run Number
OPTION 1 Original F-COBRA-
TF Models
OPTION 2 Directed Crossflow through All Gaps
OPTION 3 No Directed
Crossflow through Peripheral Gaps
OPTION 4 Original F-COBRA-TF Models, β = 0.04
Mean Value
Standard Deviation
Mean Value
Standard Deviation
Mean Value
Standard Deviation
Mean Value
Standard Deviation
8 4.6% 2.8% 8.4% 5.2% 6.9% 5.3% 7.0% 4.4% 9 5.0% 3.1% 7.8% 5.5% 6.4% 5.4% 6.5% 5.2%
10 5.4% 3.0% 8.8% 6.4% 7.3% 6.4% 7.5% 6.0% 11 5.2% 3.5% 8.6% 5.8% 7.0% 5.7% 7.5% 5.5% 12 5.7% 4.0% 8.5% 5.6% 6.9% 5.8% 7.4% 5.6% 13 5.6% 4.0% 7.9% 5.5% 6.3% 5.4% 6.8% 5.5% 14 7.1% 5.4% 11.8% 10.6% 9.8% 8.8% 10.5% 10.1% 15 7.2% 5.1% 10.2% 9.1% 8.4% 7.3% 9.3% 8.5% 16 5.9% 4.2% 7.6% 4.8% 6.2% 4.5% 6.7% 4.7% 17 6.1% 3.5% 7.6% 5.1% 6.0% 5.2% 6.4% 4.9% 18 6.2% 3.2% 7.5% 5.6% 6.0% 5.6% 6.4% 4.8% 19 5.7% 2.3% 7.7% 5.7% 6.0% 5.0% 6.3% 4.8% 20 4.8% 3.4% 5.5% 3.0% 3.8% 3.0% 4.5% 2.4% 21 5.2% 3.8% 5.5% 2.9% 3.9% 2.7% 4.6% 2.3% 22 5.6% 3.3% 6.5% 4.7% 5.0% 4.3% 5.4% 4.0% 23 6.0% 3.3% 7.6% 5.4% 5.9% 5.1% 6.4% 4.6% 24 5.8% 3.5% 7.5% 5.3% 5.8% 4.9% 6.3% 4.5% 25 5.6% 3.6% 5.6% 3.7% 4.0% 3.3% 4.7% 2.9% 26 4.9% 3.5% 4.9% 2.2% 3.0% 2.2% 3.8% 1.6% 27 5.1% 3.0% 6.2% 3.8% 4.5% 3.6% 5.2% 3.0% 28 4.8% 2.8% 6.0% 4.1% 4.7% 3.5% 5.0% 3.2%
average 5.6% 7.5% 5.9% 6.4%
164

Table 18: Statistical analyses for data set 1: internal subchannels. Mean value and standard deviation of
relative temperature differences
Run Number
OPTION 1 Original F-COBRA-
TF Models
OPTION 2 Directed Crossflow through All Gaps
OPTION 3 No Directed
Crossflow through Peripheral Gaps
OPTION 4 Original F-COBRA-TF Models, β = 0.04
Mean Value
Standard Deviation
Mean Value
Standard Deviation
Mean Value
Standard Deviation
Mean Value
Standard Deviation
8 9.5% 5.9% 3.5% 2.3% 3.6% 2.7% 4.0% 2.9% 9 7.9% 5.3% 3.4% 1.5% 3.3% 1.5% 3.7% 1.8%
10 9.0% 5.7% 3.6% 2.2% 3.5% 2.6% 4.4% 2.5% 11 7.5% 4.9% 3.3% 2.1% 3.3% 2.3% 3.6% 2.4% 12 6.8% 4.8% 3.2% 1.6% 3.2% 1.5% 3.5% 1.7% 13 6.6% 4.5% 3.2% 1.8% 3.1% 1.7% 3.4% 1.7% 14 9.3% 5.5% 4.7% 3.5% 5.1% 3.4% 5.0% 3.9% 15 7.0% 5.2% 4.0% 3.0% 3.9% 2.7% 4.0% 3.2% 16 6.1% 4.0% 4.7% 2.6% 4.5% 2.1% 4.6% 2.2% 17 6.6% 4.3% 4.1% 2.3% 4.2% 2.1% 4.2% 2.1% 18 7.3% 4.6% 4.1% 2.1% 4.2% 2.2% 4.5% 2.0% 19 9.4% 5.6% 4.7% 3.4% 5.0% 3.7% 5.3% 3.6% 20 6.1% 4.5% 4.3% 2.3% 4.2% 2.3% 4.5% 2.0% 21 6.0% 4.2% 4.4% 2.4% 4.2% 2.2% 4.5% 2.0% 22 8.1% 5.6% 4.7% 3.2% 4.6% 3.9% 5.0% 3.5% 23 7.3% 5.4% 4.7% 2.8% 4.5% 3.2% 4.9% 2.8% 24 7.2% 5.2% 4.8% 2.7% 4.7% 3.2% 5.0% 2.8% 25 6.8% 4.9% 4.7% 2.6% 4.5% 3.0% 4.9% 2.5% 26 6.4% 4.5% 4.6% 2.2% 4.6% 2.5% 4.8% 2.1% 27 8.1% 5.0% 4.1% 2.4% 4.2% 2.8% 4.9% 2.3% 28 8.3% 5.1% 4.8% 3.1% 4.8% 3.5% 5.5% 3.3%
average 7.5% 4.2% 4.1% 4.5%
165

Table 19: Statistical analyses for data set 1: cent nels only. Mean value and standard deviation of
relative temperature differences
Run Number
OPTION 1 Original F-COBR
TF Models
PTION 2 cte ssflow ug l G
OPTION 3 No Directed ssf through ri Gaps
OPTION 4 Original F-COBRA-TF Models, β = 0.04
ral subchan
A-O
Dire d Crothro h Al aps Cro low
Pe pheral
Mean Value
StanDeviation
n e ev
anlue
Standard Deviation
Mean Value
Standard Deviation
dard MeaValu
Standard D iation
Me Va
8 16.3% 3.2 1 % 1.6% 3.8% 2.7% % 2.5% .3% 2.8 9 13.7% 3.5% 2.3% 0.9% 2.3% 1.1% 3.1% 2.7%
10 15.0% 3.5% 2.3% 1.6% 2.5% 1.9% 5.0% 2.9% 11 12.0% 2.8 0.5% 1.8% 0.7% 2.2% 2.1% % 1.7%12 12.1% 3.2 0.5 % 2.6% 2.2% % 2.1% % 2.2 0.7%13 11.0% 2.6 1.2 % 1.9% 1.4% % 1.7% % 1.6 1.2%14 13.0% 4.8 1.3 % 1.8% 3.2% 3.5% % 3.1% % 3.1 15 11.7% 4.5 1.2 % 1.6% 2.4% 3.0% % 2.9% % 2.8 16 9.0% 4.0 2. % 2.5% 1.8% % 3.2% 4% 3.1 2.0%17 10.0% 3.8 1. % 2.4% 1.9% % 2.7% 8% 2.6 1.7%18 11.3% 4.0 1. % 2.9% 2.2% % 2.4% 8% 2.4 1.9%19 14.0% 3.2% 2.5% 1.7% 2.8% 2.1% 4.2% 2.8% 20 9.6% 4.2 2.6% 2.6% 2.5% 2.8% 2.1% % 2.6%21 9.6% 4.1 2.4% 2.6% 2.3% 2.7% 2.1% % 2.6%22 12.2% 4.5 1. 9% 3.6% 2.9% % 2.9% 7% 2. 2.2%23 11.3% 4.1 1. % 1.7% 3.2% 2.1% % 2.6% 6% 2.7 24 10.7% 4.6 2. % 3.2% 2.4% % 3.0% 0% 3.0 1.9%25 10.2% 4.4 2. 7% 3.0% 2.3% % 2.8% 4% 2. 2.5%26 9.0% 4.6 2. 0% 2.9% 2.5% % 3.1% 8% 3. 2.7%27 12.0% 3.3 1. 8% 4.7% 2.9% % 2.3% 8% 2. 2.3%28 11.8% 3.0% 2.5% 2.6% 6.1% 2.7% 3.7% 4.4%
average 11.7% 2.7% 2.6% 3.3%
166

Table 20: Statistical analyses: Temperature differences for each subchannel i averaged over the calculated test points
OPTION 1: ( )
N
TTN
nisubchannelcalc∑
=
−1
_exp
n/a 1.4 1.4 1.4 -0.1 1.3 -0.1 3.9 5.0 6.5 -0.8 -4.1 0.9 7.2 5.7 7.6 2.0 -3.5 -5.3 -1.1 4.6 9.3 6.0 3.6 -3.3 -0.2 1.7 0.8 2.4 1.7 2.5 -6.3 0.2 -5.0 -3.0 -4.7
OPTION 2: ( )
N
TTN
nisubchannelcalc∑
=
−1
_exp
n/a 6.2 5.6 5.7 4.2 4.8 4.0 3.0 3.6 3.3 -1.4 0.3 3.6 2.8 -0.7 0.6 -2.2 -1.4 -3.5 -5.4 -2.5 1.9 2.4 6.8 0.9 -1.1 -2.2 -2.6 3.0 6.1 6.3 -2.0 3.5 -2.2 2.8 2.4
OPTION 3: ( )
Nn
isubchannelcalc=1
_exp
TT
N
∑ −
n/a 4.7 6.2 4.0 3.4 4.0 3.3 3.6 4.9 2.9 -1.1 -0.4 2.8 2.9 -0.3 0.8 -1.0 0.3 -1.6 -4.2 -2.2 2.4 2.5 6.1 0.2 -0.8 -2.3 -1.2 3.7 5.7 5.5 -2.5 2.5 -0.5 2.3 0.5
OPTION 4: ( )
N
TTN
nisubchannelcalc∑
=
−1
_exp
n/a 4.9 5.0 4.2 3.3 4.9 3.4 3.1 4.1 3.6 -1.9 -0.5 2.8 3.7 0.8 2.0 -1.4 -1.4 -3.2 -4.5 -1.1 3.5 3.2 5.9 0.2 -1.4 -1.8 -2.1 3.0 5.4 6.3 -2.8 2.2 -2.6 1.5 1.3
167

Code Convergencetime step
0.00
0.10
0.20
0.30
0.40
0.50
0 100 200 300 400 500Time step number
CPU
tim
e pe
r tim
e st
ep, s
standard modelspacer grid model
Figure 60: Comparison of the code temporal convergence when modeling directed crossflow
Mass Balance
-100
-50
0
50
100
0 1 2 3 4 5
Time, s
Dev
iatio
n fro
m s
tead
y st
ate,
%
standard modelspacer grid model
Figure 61: Comparison of the code convergence on mass balance when modeling directed crossflow
168

Heat Balance
-100
-50
50
0 1 2 3 4 5 6
atio
nro
m s
tead
y st
ate,
%
0
100
Time, s
Dev
i f
standard modelspacer grid model
Figure 62: Comparison of the code convergence on heat balance when modeling directed crossflow
169

6.3 Concluding Remarks
Most of the subchannel codes do not have advan chanistic models for evaluation of the
lateral flow rates caused by a change of the axial velocity vector into a certain direction. A very
coarse approach is commonly used: the contribution of the lateral convection to the crossflow is
approximated by artificially increasing the single-phase mixing coefficient to calculate a crossflow
with a magnitude sufficient to reproduce experimental results of the available mixing tests. To
overcome the above discussed modeling deficiency, the new generation subchannel codes must
separate the treatment of the diffusive spacer grid effects and the convective spacer grid effects.
acers based on CFD
analyses was proposed. The required modifications of the subchannel code F-COBRA-TF were
presented.
ental data confirm the new model
applicability for design studies and safety evaluations.
ced me
A new methodology for modeling of the directed crossflow created by sp
The results of the model validation against experim
170

CHAPTER 7
CONCLUSIONS
its comprehensive modeling features, the thermal-hydraulic subchannel code COBRA-
ly used for LWR safety margins evaluations and design analyses. Under the name F-
and in the framework of a joint research project between PSU
Due to
TF is wide
COBRA-TF and AREVA NP GmbH
the cod a
make the
numerics, a
be a good b
In order to enable the code for industrial applications including LWR safety margins
evaluati s
were revise
The s
performance of the flow in LWR rod bundles employs numerical experiments performed by
comput
validated a dated, the CFD predictions are then used for
improve
involved computational cost, CFD codes can not be yet used for full bundle predictions, while
subchannel codes equipped with ad
analyses.
The unique contributions of this PhD research
e h s undergone through an extensive validation/verification and qualification program. To
F-COBRA-TF code applicable for industrial applications, the code programming,
nd basic models were improved. The current version of F-COBRA-TF is considered to
ase for implementation of new modeling capabilities.
on and design analyses, the code modeling capabilities related to the spacer grid effects
d and substantially improved.
tate-of-the-art in the modeling of the spacer grid effects on thermal-hydraulic
ational fluid dynamics calculations. The capabilities of the CFD codes are usually being
gainst mock-up tests. Once vali
ment and development of more sophisticated subchannel codes’ models. Because of the
vanced physics are a powerful tool for LWR safety and design
are seen as development, implementation, and
171

qualification of an innovative spacer grid model utilizing CFD results within the framework of a
subchannel analysis code. The most important outcomes of the performed research are:
Based on an extensive literature review and theoretical comparative analyses of the
existing F-COBRA-TF conservation equations and the full Reynolds-averaged Navier-
Stokes equations the “missing” physics on the subchannel-level modeling and the
phenomena directly influenced by spacer grids were identified.
Models for some of the missing phenomena in the current spacer grid modeling in the
subchannel analysis codes were developed. Those are the spacer grid effects on the
mass, heat, and momentum exchange mechanisms such as turbulent mixing and the
lateral flow patterns created by specific configurations of the grid structural elements
A methodology was developed for off-line coupling between the CFD code STAR-CD
and the subchannel code F-COBRA-TF. The developed coupling scheme is flexible in
axial mesh overlays. It is developed in a way to be easily adapted to other
CFD/subchannel codes.
The implemented models do not affect the code convergence and do not result in
prolonged CPU times.
The implemented directed cross-flow modeling capabilities were successfully validated
against experimental data.
As a future work, models for the intra-subchannel swirl and the single-phase pressure losses
(directed crossflow).
Separate modeling of the spacer grid effects on the diffusive and on the convective
processes was proposed and tested.
172

in transverse direction have to be develo nnel swirl created by the split vanes
im
effect that cannot be taken into account at a subchannel level. The heat transfer enhancement by
sw g CFD prediction for
th
the axial velocity vector. ing axial velocity will result in an enhanced heat transfer. The
d n be
de
be addressed: formation of bubbles pockets next to the rod surfaces and increase of deposition rate
b
b
coef
tr
TF logic for the horizontal pressure loss coefficient at a given gap. An additional term, due to the
fl be defined. The horizontal
sp
q ch pressure losses.
ped. The intra-subcha
proves the heat transfer from the rod surface to the liquid. The swirl has only a local convective
irling flow can be quantified by means of CFD calculations. The idea is usin
e velocity curl to evaluate a surface or volume average tangential velocity that will be added to
The increas
ependence of the swirl intensity of the vane angle can be correlated and a decay function ca
fined. Further, when two-phase conditions are considered, there are two other effects that should
y the swirl.
In the axial direction the pressure losses due to spacers are already modeled in F-COBRA-TF
y applying spacer grid loss coefficients. As described in Chapter 2, along with the wall drag
ficients they define explicit factors that multiply the liquid and vapor flow rates. In the
ansverse direction the pressure losses due to spacers may be modeled by following the F-COBRA-
uid friction on the spacer surfaces, at an input specified location, can
acer loss coefficients may be determined from experimental data or CFD calculations. The
uestion is how significant in magnitude are su
173

REFERENCES
AEA Technology Engineering Software ltd., (1999): CFX-TASCflow Computational Fluid Dynamics Software
AEA Technology Oxfordshire, (1997): CFX International, CFX-4.2 Solver
, Sweden
arative Analysis of PWR Core Wide and Hot Channel
t Subchannel Calculations,
is, The Pennsylvania State University
ort. Implementation of
t al., (2006a): Improvements and Applications of COBRA-TF for Stand-Alone
Akiyama, Y. et al., (1995): Void Fraction Measurement of PWR Fuel Assembly and Improvement of PWR Core Analysis, Proceedings: Third International Seminar on Subchannel Analysis (ISSCA-3), Stockholm
Allaire, G. (1995): Solving Linear Systems in FLICA-4, a Thermal-Hydraulic Code for 3-D Transient Computations, d Proceedings: Internat. Math. Comp. Mtg., Portland, OR, 284-288
Avramova, M.N. et al., (2002): CompCalculations, Transactions from ANS 2002Winter Meeting, Washington DC
Avramova, M.N. et al., (2003a): COBRA-TF PWR Core Wide and HoTransactions from ANS 2003 Annual Meeting, San Diego, CA, USA
Avramova, M.N., (2003b): COBRA-TF Development, Qualification, and Application to LWR Analysis, MS Thes
Avramova, M.N. et al., (2003c): PWR MSLB Simulations using COBRA-TF Advanced Thermal-Hydraulic Code, Transactions from ANS 2003 Winter Meeting, New Orleans, Louisiana, USA
Avramova, M.N., (2004a): F-COBRA-TF 1.2: Source Modification Report. Modifications from Version 1.2a to Version 1.2b: Unformatted Input Structure, Dump/Restart Option, and SI Units, (RDFMG SIM-MA 008(04) rev.0)
Avramova, M.N., (2004b): F-COBRA-TF 1.2: Source Modification Report. Automated Input Deck Cross-Checking Procedure, (RDFMG SIM-MA 010(04) rev.0)
Avramova, M.N., (2005a): F-COBRA-TF 1.03: Source Modification RepKrylov subspace methods for solution of the F-COBRA-TF linear system of pressure equations, RDFMG SIM-MA 010(05) rev.0
Avramova, M.N., (2005b): Progress Report: F-COBRA-TF Development and Qualification, (RDFMG PR-MA 06(05))
Avramova, M.N., (2006): Verification Matrix of F-COBRA-TF 1.02b. AREVA Technical Report A1C-1323418-0
Avramova, M.N. eand Coupled LWR Safety Analyses, Proceedings: PHYSOR 2006, Vancouver, Canada
Biasi, L. et al., (1967): Studies on Burnout, Part 3, Energia Nucleate, 14(9), 530-536
174

Bajorek, S.M. and Young, M.Y., (1998): Assessment and Qualification of WCOBRA/TRAC-MOD7A heat Transfer Coefficients for Blowdown Dispersed Flow Film Boiling, Proceedings: Sixth International Conference on Nuclear Engineering (ICONE-6), San Diego, CA, USA
n rod bundles. Bettis Atomic Power Laboratory, WAPD-T-2438
erformance with Comparison to Experimental Results, Nuclear Technology, 149, 49-61
e Drop Measurements in Single- and Two-Phase Adiabatic Air-Water Turbulent Flows in Realistic BWR Fuel Assembly geometry with Spacer
Chen, J.C., (1963): A Correlation for Boiling Heat Transfer to Saturated Fluids in Convective
Andersen, J.G.M., (1997a): Prediction of Test Rod Temperature during a Transient Dryout”, Proceedings: Fourth International Seminar on Subchannel Analysis (ISSCA-
Chen, X.M. and Andersen, J.G.M., (1997b): Prediction of Cross Sectional Void Distribution in a
URETH-8), Vol.3, Kyoto, Japan
ics
er by COBRAG
.E. et al., (2004): Lateral Flow Field Behavior Downstream of Mixing Vanes in a
et al., (2004): Improving the Computation Efficiency of COBRA-TF for LWR Safety
ion of Two-Fluid Hydrodynamics Equations in the COBRA-TF Code, Proceedings: M&C 2005,
Beus, S.G. (1970): A two-phase turbulent mixing model for flow i
Campbell, R.L. et al., (2005): Computational Fluid Dynamics Prediction of Grid Spacer Thermal-Hydraulic P
Caraghiaur, D. et al., (2004): Detailed Pressur
Grids, Proceedings: Sixth International Conference on Nuclear Thermal Hydraulics, Operation and Safety (NUTHOS-6), Nara, Japan
Flow, ASME 63-HT-34, American Society of Mechanical Engineers
Chen, X.M. and
4), Tokyo, Japan
BWR Fuel Bundle Configuration, Proceedings: Eighth International Topical Meeting on Nuclear Reactor Thermal-Hydraulics (N
Chen, X.M. and Andersen, J.G.M., (1999): Dynamics in BWR Fuel Bundles during Transients, Proceedings: Ninth International Topical Meeting on Nuclear Reactor Thermal-Hydraul(NURETH-9), San Francisco, CA, USA
Chu, K.H. and Shiralkar, B.S., (1993): Study of Spacer Effect on Critical PowBased on a Two-Fluid and Multi-Field Model, Proceedings: Second International Seminar on Subchannel Analysis (ISSCA-1), Palo Alto, CA, USA (EPRI TH-103188)
Conner, MSimulated Nuclear Fuel Rod Bundle, Proceedings of ICAPP’04, Pittsburg, PA, USA
Cuervo, D. Analysis of Large Problems, Proceedings: PHYSOR 2004, Chicago, USA
Cuervo, D. et al., (2005): Implementation and Performance of Krylov Methods for the Solut
Avignon, France,
Cui, X.-Z. and Kim K.-Y., (2003): Three-Dimensional Analysis of Turbulent Heat Transfer and Flow through Mixing Vane in a Subchannel of Nuclear Reactor, Journal of Nuclear Science and Technology, 40, No10, 719-724
175

Demmel, J.W. et al., (1999): A Supernodal Approach to Sparse Partial Pivoting, SIAM J. Matrix Anal. Appl. , 20 (3),pp. 720-755
Dittus, F.W. and Boelter, L.M.K., (1930): Heat Transfer in Automobile Radiators of Tubular Type, University of California, Berkeley Publ. Eng. 2, 13, 442-462
Downar, T. and Joo, H. (2001): A Preconditioned Krylov Method for Solution of the Multi-dimensional, Two-fluid Hydrodynamics Equations, Annals of Nuclear Energy, 28, pp. 1251-1267
Drew, D.A. and Lahey, R.T. (1979): An Analytical Derivation of a Sub-Channel Void Drift Model, Trans. Am. Nucl. Soc. (ANS), Vol. 33
Ergun, S. et al., (2005a): Modification to COBRA-TF to Model Dispersed Flow Film Boiling with
Ergun, S., (2005b): Modeling of Dispersed Flow Film Boiling and Spacer Grid Effects on Heat
Faya, A.J.G. (1979): Development of a Method for BWR Sub-Channel Analysis. Ph.D. thesis,
Fighetti, C. et al., (1990): Error analysis of SIEMENS Critical Heat Flux (CHF) Tests,
i, C., et al., (2001a): COBRA-TF Simulation of BWR Bundle Dry Out Experiment, Proceedings: Ninth International Conference on Nuclear Engineering (ICONE9), Nice, France
International Conference on Nuclear Engineering (ICONE9), Nice, France
nalysis (overview over approaches in open literature). AREVA Technical Report A1C-1316739-0
, Annual Meeting on Nuclear Technology, Aachen, Germany
ork, November 26-30.
Two Flow, Five Field Eulerian - Eulerian Approach, Transactions from ANS 2005 Winter Meeting, Washington DC, USA
Transfer with Two-Flow, Five-Field Eulerian-Eulerian Approach, PhD Thesis, The Pennsylvania State University
Massachusetts Institute of Technology (MIT)
CU/HTRF-90-04, June, 1990
Frepol
Frepoli, C. et al., (2001b): Modeling of Annular Film Dry Out with COBRA-TF, Proceedings: Ninth
Glueck, M. and Kollmann, T. (2005): Application and Visualization Capability of the Sub-Channel Code F-COBRA-TF, Proceedings: Annual Meeting on Nuclear Technology, Nuremberg, Germany
Glueck, M., (2005a): Validation Matrix F-COBRA-TF 1.2b. AREVA Technical Report A1C-1316211-0
Glueck, M., (2005b): Modeling of Turbulent Mixing and Void Drift in Sub-Channel A
Glueck, M. (2006): A New Individual Film Model in the Sub-Channel Code F-COBRA-TF
Gonzalez-Santalo, J.M. and Griffith, P. (1972): Two-Phase Flow Mixing in Rod Bundle Sub-Channels. ASME Winter Annual Meeting, New Y
176

Griffith P. et al., (1977): PWR Blowdown Heat Transfer, Thermal and Hydraulic Aspects of Nuclear Reactor Safety, American Society of Mechanical Engineers, New York, Vol.1, 17-41
Herkenrath, H. et al., (1979): Experimental Investigation of the Enthalpy and Mass Flow
Holowach, M.J. et al., (2002): Improving Flow Modeling in Transient Reactor Safety Analysis
n
kshop, University Park, PA, USA
odel for Turbulent Flow around a Grid Spacer with Mixing
Geometries – Final Report,
h a CFD Code,
Gu C-Y et al., (1993): 3-D Flow Analyses for Design of Nuclear Fuel Spacer, Proceedings: Second International Seminar on Subchannel Analysis (ISSCA-2), Palo Alto, CA, USA
Distribution between Sub-Channels in BWR Cluster Geometry (PELCO-S), Joint Research Center Ispra Establishment-Italy
Computer Codes: Eighth International Conference on Nuclear Engineering (ICONE-8), Arlington, VA, USA
Hoshi, M. et al., (1998): Cross Flow of PWR Mixed Core II – Evaluation for Staggered Mixing Vane Grid, Proceedings: Sixth International Conference on Nuclear Engineering (ICONE-6), San Diego, CA, USA
Hotta, A. et al., (2004): A Modified Equilibrium Void Distribution Model Applicable for Conventional Square and Tight Lattice BWR Fuel Bundles. Proceedings: Sixth International Conference on Nuclear Thermal Hydraulics, Operations and Safety (NUTHOS-6), Nara, Japa
Hotta, A., (2005): Preliminary Results of Exercise-1 in NUPEC BFBT Benchmark based on NASCA, NUPEC Benchmark 2nd Wor
Ikeda, K., et al., (1998): Cross Flow of PWR Mixed Core I – Measurement and CFD Prediction, Proceedings: Sixth International Conference on Nuclear Engineering (ICONE-6), San Diego, CA, USA
Ikeno, T., (2001): An Application of the Model of Flow Pulsation to the Rod Gap in the Nuclear Fuel Assembly, Proceedings: Flow Modeling and Turbulence Measurements (FMTM2001), 659-666
Ikeno, T., (2005): Computational MVane, Proceedings: Eleventh International Meeting on Nuclear Reactor Thermal-Hydraulics (NURETH-11)
In, W.K. et al., (2001): Numerical Study of Coolant Mixing Caused by the Flow Deflectors in a Nuclear Fuel Bundle, Nuclear Technology, 134, 187-195
Ingesson, L. (1969): Heat Transfer between Sub-Channels in a Rod Bundle. AE-RL-1125
Janssen, E., (1971): Two-Phase Flow and Heat Transfer in Multi-RodGEAP-10347 AEC Research and Development Report
Jeong, H., (2004): Evaluation of Turbulent Mixing between Sub-Channels witProceedings: Proceedings: Sixth International Conference on Nuclear Thermal Hydraulics, Operation and Safety (NUTHOS-6), Nara, Japan
177
Jeong, J.-J. et al., (1999): Development of a Multi-Dimensional Thermal-Hydraulic System Code, MARS 1.3.1, Annals of Nuclear Energy, 26, 1161-1642
Jeong, J.-J. et al., (2004): Development of Subchannel Analysis Capability of the Best-Estimate Multi-Dimensional System Code, MARS 3.2, Proceedings: Korean Nuclear Society 2004 Spring Meeting, Kyundju, Korea
eting on Nuclear Reactor Thermal-Hydraulics (NURETH-11), Avignon, France
Team Using MATRA, MARS(COBRA-TF) and CFX, NUPEC Benchmark 2 Workshop, University Park, PA, USA
neering Conference, Nagoya, Japan, Nov. 17-21
n and Slug Flow Characteristics for Hydraulically Equilibrium Air-Water Two-phase Flow in a Vertical 2x3 Rod Bundle, Proceedings of ASME
Kappes, Ch. (2006): CFD Simulationen zur Bestimmung von
Jeong, J.-J. et al., (2005a): Prediction of Two-Phase Flow Distributions in Rod Bundles Using the Best-Estimate System Code MARS, Proceedings: Eleventh International Topical Me
Jeong, J. J., et al., (2005b): Activities of KAERI BFBT Benchmarknd
Kano, K. et al., (2002): Turbulent Mixing Rate between Adjacent Subchannels in a Vertical 2x3 Rod Channel, Proceedings of The 5th JSME-KSME Fluids Engi
Kano, K. et al., (2003): Flow Distributio
FEDSM’03 4th ASME-JSME Joint Fluids Engineering Conference, Honolulu, Hawaii, USA
SPβ (in German), AREVA working
channels for Hydrodynamic Non-Equilibrium Flow,
wo-Fluid Multidimensional Code
ar Engineering and Design, 205, 281
documentation, BD/FEET/2006/942
Karoutas, C.Y. et al., (1995): 3-D Flow Analyses for Design of Nuclear Fuel Spacer, Proceedings: Seventh International Meeting on Nuclear Reactor Thermal-Hydraulics (NURETH-7), Saratoga, New York
Kawahara, A. et al., (2004): Experiment and Analysis of Air-Water Two-Phase Flow Redistribution due to Void Drift between SubProceedings of The 6th International Conference on Nuclear Thermal Hydraulics Operations and Safety (NUTHOS-6) , Nara, Japan
Kelly, J.E. (1980): Development of a Two-Fluid, Two-Phase Model for Light Water Reactor sub-channel analysis. Ph.D. thesis, Massachusetts Institute of Technology (MIT)
Kelly, J.E., et al., (1981): THERMIT-2: A Two-Fluid Model for Light Water Reactor Subchannel Transient Analysis, Energy Laboratory Report No. MIT-EL 81-014, MIT
Kelly, J.E. and Kazimi, M.S. (1980): Development of the TTHERMIT for LWR Analysis, AIChE Symposium Series 199, Vol.76
Kim, S. and Park, G.-S., (1997): Estimation of Anisotropic Factor and Turbulent Mixing Rate Based on the Flow Pulsation Phenomenon, Nuclear Technology, 117, 197-209
Kim, S. and Chung, B.J., (2001): A Scale Analysis of the Mixing Rate for Various Prandtl Number Flow Fields in Rod Bundles, Nucle
178

Kim, K.-Y. and Seo J-W., (2005): Numerical Optimization for the Design of a Spacer Grid with Mixing Vanes in a Pressurized Water Reactor Fuel Assembly, Nuclear Technology, 149, 62-70
Krulikowski, T.E., (1997): Separation of Diversion Crossflow Effects from Other Mixing Effects
Kuldip, S. and Pierre, C.C.St., (1973): Two-Phase Mixing for Annular Flow in Simulated Rod
Two-phase flow and heat transfer in multi-rod geometries: Sub-channel and Pressure Drop Measurements in Nine-Rod Bundle for Diabatic and Adiabatic
Lahey, R.T. and Moody, F.J. (1993): The Thermal Hydraulics of a Boiling Water Nuclear
Lee, S.Y. et al., (1992): COBRA/RELAP5: A Merged Version of COBRA-TF and RELAP5/MOD3
Levy, S. (1963): Prediction of Two-Phase Pressure Drop and Density Distribution from Mixing
Loftus, M.J. et al., (1982): PWR FLECHT SEASET 21-Rod Bundle Flow Blockage Task Data and
McClusky, H.L. et al., (2002): Development of Swirling Flow in a Rod Bundle Subchannel,
Mishima, K. and Ishii, M. (1984): Flow Regime Transition Criteria for Upward Two-Phase Flow
Möller, S.V., (1991): On Phenomena of Turbulent Flow through Rod Bundles, Experiments
rovement and Application of Subchannel Analysis Codes for Advanced Light Water Reactors, Proceedings: Second International Seminar on Subchannel
Naitoh, M. et al., (2002): Critical Power Analysis with Mechanistic Models for Nuclear Fuel
Kronenberg, J. et al., (2003): COBRA-TF - a Core Thermal-Hydraulic Code: Validation against GE 3x3 Experiment”, Annual Meeting on Nuclear Technology 2003, Proceedings, ISSN 720-9207, pp. 105 – 109
within the Thermal Diffusion Coefficient, MS Paper, The Pennsylvania State University
Bundle Geometries, Nuclear Science and Engineering, Vol. 50, 382-401
Lahey, R. T. et al., (1970):
Conditions, GEAP-13049 AEC Research and Development Report
Reactor, American Nuclear Society (ANS)
Codes, Nuclear Technology, 99, 177-187
Length Theory, Journal of Heat Transfer, no. 5 (1963), pp. 137-152
Analysis Report, NRC/EPRI/Westinghouse-11
Journal of Fluids Engineering, 124, 747-755
in Vertical Tubes. Int. J. Heat Mass Transfer, vol. 27, no. 5, pp. 723-737
Thermal Fluid Science, 4, 25
Murao, T. et al., (1993): Imp
Analysis (ISSCA-1), Palo Alto, CA, USA (EPRI TH-103188)
Bundles, (I) Models and Verifications for Boiling Water Reactor Application, Journal of Nuclear Science and Technology, 39, No 1, 40-52
Neykov, B. et al., (2005): NUPEC BWR Full-Size Fine-Mesh Bundle Test (BFBT) Benchmark. Volume 1: Specifications, NEA/NSC/DOC
179

Ninokata, H. et al., (2001): Development of the NASCA Code for Predicting Transient BT Phenomena in BWR Rod Bundles. NEA / CSNI / R(2001)2, vol. 2.
Boiling Transition Model Development Applicable to a Wide Variety of Fuel Bundle Geometry, Proceedings: Sixth
and Safety (NUTHOS-6),
dvances in the Modeling Methodologies of Two-Phase Flows, Lyon, France
Korea
Park, C.E. et al., (2005): Extended COBRA-TF and Its Application to Non-LOCA Analysis, Trans.
-Rod Blocked Bundle Data using COBRA-TF, NRC/EPRI/Westinghouse-12
Rehme, K., (1992): The Structure of Turbulence in Rod Bundles and the Implications on Natural
Rogers, J. T. and Rosehart, R. G., (1972): Mixing by Turbulent Interchange in Fuel Bundles,
r, A.E.E. (1975): Turbulent Interchange Mixing in Rod Bundles and the Role of Secondary Flows. ASME, Heat Transfer Conference.
clear Regulatory Commission Rod Bundle Heat Transfer Facility, Proceeding: Sixth ASME-JSME Thermal
Rowe, D.S. and Angle, C.W. (1967): Crossflow Mixing between Parallel Flow Channels during
en Parallel Flow Channels during Boiling. Part III: Effect of Spacers on Mixing between Two Channels. BNWL-371 (Part III)
Flow Structure, International Journal of Heat and Mass Transfer, 17,
Ninokata, H., et al. (2004a): Current Status of Generalized
International Conference on Nuclear Thermal Hydraulics, Operations Nara, Japan
Ninokata, H., (2004b): Two-Phase Flow Modeling in the Rod Bundle Subchannel Analysis, Proceedings: A
Nordsveen, M. et al., (2003): The MONA Subchannel Analysis Code – Part A: Model and Description, Proceedings: Tenth International Meeting on Nuclear Reactor Thermal-Hydraulics (NURETH-10), Seoul,
Okubo, T. et al., (1997): Recent Activities on Subchannel Analysis at JAERI, Proceedings: Fourth International Seminar on Subchannel Analysis (ISSCA-4), Tokyo, Japan
of ANS 2005 Winter Meeting, Washington DC, USA
Paik, C. Y. et al., (1985): Analysis of FLECHT SEASET 163
Ratnayake, R.K., (2003): Entrainment and Deposition Modeling of Liquid Films with Applications for BWR Fuel Rod Dryout, PhD Thesis, The Pennsylvania State University
Mixing between Subchannels, International Journal of Heat and Mass Transfer, 35, 567
Correlations and Inferences, ASME, 72-HT-53
Rogers, J.T. and Tahi
Rosal, E.R. et al., (2003): The Pennsylvania State University and U.S. Nu
Engineering Joint Conference
Boiling. Part II: Measurement of Flow Enthalpy in Two Parallel Channels. BNWL-371 (Part II)
Rowe, D.S. and Angle, C.W. (1969): Crossflow Mixing betwe
Rowe, D.S. et al., 1974: Implications Concerning Rod Bundle Crossflow Mixing Based on Measurements of Turbulent
180

407
Rudzinski, K.F. et al., (1972): Turbulent Mixing for Air-Water Flows in Simulated Rod Bundle ical Engineering, vol. 50
, Nuclear Engineering and Design, Vol. 148,463-474
bulent Mixing Rate between Two Parallel Sub-Channels using a Sub-Channel Geometry Factor. Nuclear Engineering and Design,
Sadatomi, M. et al., (2003): Two-Phase Void Drift Phenomena in a 2x3 Rod Bundle (Flow
Sadatomi, M., (2004): Study of Single- and Two-Phase Fluid Transfer between Subchannels at
OS-6) , Nara, Japan
Two-Phase Gas-Liquid Flow Distributions in Multiple Channels
peration between AREVA NP GmbH and Penn State University.
An Investigation of Crossflow Mixing Effect Caused by Grid Spacer with
nnel Systems, Nuclear Science and Technology, Vol. 38 No.6, 379-387
ear Thermal
ubchannel Analysis”, Subchannel
Geometries. The Canadian Journal of Chem
Saad, Y., (2000) Iterative Methods for Sparse Linear Systems, 2nd ed.
Sadatomi, M. et al., (1994): Flow Redistribution due to Void Drift in Two-Phase Flow in a Multiple Channel Consisting of Two Subchannels
Sadatomi, M. et al., (1996): Prediction of the Single-Phase Tur
vol. 162, pp. 245-256.
Redistribution Data and Their Analysis, Proceedings of The 10th International Topical Meeting on Nuclear Reactor Thermal Hydraulics (NURETH-10), Seoul, Korea
Kumamoto University, Proceedings of The 6th International Conference on Nuclear Thermal Hydraulics Operations and Safety (NUTH
Sato, Y. (1992): Cross flow of Gas-Liquid Mixture between Sub-Channels. In: Sub-channel analysis in nuclear reactors. Proc. of the Int. Seminar on Sub-channel Analysis ISSCA’92 (Eds.:Ninokata, H. and Aritomi, M.), The Institute of Applied Energy and The Atomic Energy Society, Japan.
Sato, Y. and Sadatomi, M.,: , DYNAMICS OF TWO-PHASE FLOWS, CRC Press
Schell, H., 2006: Co-oAssessment Concerning F-COBRA-TF Development, (A1C-1323146-0), AREVA NP GmbH, Erlangen, Germany
Shen, Y.F. et al., (1991): Mixing Blades in a Rod Bundle, Nuclear Engineering and Design, 125, 111-119
Shirai, H. and Ninokata, H., (2001): Prediction of the Equilibrium Two-Phase Flow Distributions in Inter-Connected Subcha
Shirai, H. et al., (2004): A Strategy of Implementation of the Improved Constitutive Equations for the Advanced Subchannel Code, Proceedings: Sixth International Conference on NuclHydraulics, Operations and Safety (NUTHOS-6), Nara, Japan
Shiralkar, B.S., and Chu, K.H., (1992) “Recent Trends in SAnalysis in Nuclear Reactors: Proceedings of the International Seminar on Subchannel Analysis (ISSCA’92), Tokyo, Japan
181
Solis, J. et al., (2004): Multi-level methodology in parallel computing environment for evaluating BWR safety parameters, Nuclear Technology, Vol. 146, 3, 267-278
Sugawara, S. (1990): Droplet Deposition and Entrainment Modeling Based on the Three-Field
Sugawara, S. et al., (1991): Sub-channel analysis by the FIDAS code based on the three-fluid
Taitel, Y. et al., (1980): Modeling Flow Pattern Transitions for Steady Upward Gas-Liquid Flow
Takeuchi, K. et al., (1998): Subcooled Flooding Predictions by WCOBRA/TRAC for UPI Tests
Tippayakul, C. et al., (2007): Investigations on Monte Carlo Based Coupled Core Calculations,
A/TRAC – A Thermal-Hydraulic Code for Transient Analysis of Nuclear Reactor Vessel and Primary Coolant Systems, NUREG/CR-3046
Turner, J. and Doster, J. (1991): Performance of the conjugate gradient-like algorithms in transient two-phase subchannel analysis, ANS 1991 Winter Meeting, San Francisco, CA, USA
VIPRE-02: A Two-Fluid Thermal-Hydraulic Code for Reactor Core and Vessel Analysis”, Volume 1: Mathematical Modeling and Solution Methods, TR-103931-V1 Research Project, Final Report, June 1994
Vogel, Chr. et al.,(1991): SIEMENS Test Section 53 (TDS53) Description of Experiments, KWU BT23, 1991, e243.
Wallis, G.B. (1969): One-Dimensional Two-Phase Flow. Mc-Graw-Hill, New York.
Wang, J., and Cao, L.,: Experimental Research for Sub-cooled Boiling Mixing between Subchannels in a Bundle
Windecker, G. and Anglart, H., (2001): Phase Distribution in a BWR Fuel Assembly and Evaluation of a Multidimensional Multifield Model, Nuclear Technology, 134, 49-61
Wong, S. and Hochreiter, L.E., (1981): Analysis of the FLECHT SEASET Unblocked Bundle Steam Cooling and Boiloff Tests, NRC/EPRI/Westinghouse-8
Würtz, J. (1978): An Experimental and Theoretical Investigation of Annular Steam-Water Flow in
CDadapco Group: STAR-CD Version 3.26
Stewart, C.W. et al., (1977): COBRA-IV: The Model and the Method. BNWL-2214, NRC-4
Model, Nuclear Engineering and Design, 122, 67-84
model. Nuclear Engineering and Design, vol. 132, pp. 253-264
in Vertical Tubes. AIChE Journal, vol. 26, no. 3, pp. 345-354.
and UPI Plants in LOCA, Proceedings: Sixth International Conference on Nuclear Engineering (ICONE-6), San Diego, CA, USA
Proceedings of ICAPP’06, Nice, France
Thurgood, M. J., et al., (1983): COBR
182

Tubes and Annuli at 30 to 90 Bar, RISO
Yadigaroglu, G., and Maganas, A., (1994): Equilibrium Quality and Mass Flux Distributions in an Adiabatic Three Subchann 112, 359-371
cc echnolo
l., (1982): Heat Transfer Augmentati Nuclear Science and Technology, 104
Yoo, Y.J. et al., (1999): Development of a Subchannel Analysis Code MATRA Applicable to PWRs and ALWRs, Journal of the Korean Nuclear Society, vol. 31, No 3, pp. 314-327
Ziabletsev, D. et al., (2004): Development of PWR Integrated Safety Analysis Methodology Using Multi-Level Coupling Algorithm, Nuclear Science and Engineering, Vol.148, 3,414-425
Ziabletsev, D., and Böer, R., (2000): Implementation and Initial Verification of the Coupling of COBRA-TF with the PANBOX Code System, Work Report (A1C-1308430-0), Siemens KWU, Erlangen, Germany
The Hydraulics Crisis in Pool Boiling of Saturated and Subcooled , Part II, No.27, 23-236 in International Developments in Heat Transfer, International Heat
Transfer Conference, Boulder, Colorado
Report No 372
el Test Section, Nuclear Technology, Vol.
Yamanouchi, A., (1968): “Effect of CoreSpray Cooling in Transient State After Loss-of-Cooling A
Yao
iident”, Jornal of Nuclear Science and T
, S.C. et a
gy 5, 11, pp. 547-558
on in Rod Bundles near Grid Spacers, Journalof
Zuber, N. et al, (1961): Liquids
183

APPENDIX A
CFD R THE 2×1 CA
ble A-1: Temperature field distribution at different strap thickness
Sub-Model
Temperature Distribution at the Outlet [Kelvin]
Temperature Distribution over the Subchannels Centroids Line [Kelvin]
RESULTS FO SE
Ta
No strips
0.4 mm
0.6
mm
184

Table A-2: Turb the gap region at
gion [Pa-s] Veloc
Region [m/s] t the Gap
Region [Kelvin]
ulent viscosity, vertical velocity, and temperature field distribution at different strap thickness
Sub-Model
Turbulent Viscosity at the VerticalGap Re
ity at the Gap Temperature a
0.3 mm
0.4 mm
0.6 mm
185

Table A-3: Vertical velocity distribution at different strap thickness
Sub-Model
Vertical Velocity at the Strip Location [m/s]
Vertical Velocity at the Outlet [m/s]
0.3 mm
0.6 mm
186

T s
cation [Pa-s]
Tu[Pa-s]
able A-4: Turbulent viscosity distribution at different strap thicknes
Sub-Model
Turbulent Viscosity at the Strip Lo rbulent Viscosity at the Outlet
0.4 mm
0.6 mm
187

Table A-5: Temperature field distribution at different vane angles
Sub-Model
Declination Angle of 50 degrees Declination Angle of 20 degrees
Tem
pera
ture
D
istri
butio
n at
th
e V
anes
Loc
atio
n [K
elvi
n]
Tem
pera
ture
Dis
tribu
tion
at t
he
Out
let [
Kel
vin]
Te
mpe
ratu
re D
istri
butio
n ov
er t
he G
ap
Reg
ion
[Kel
vin]
188

Ta s ble A-6: Turbulent viscosity distribution at different vane angle
Sub-Model
Declination Angle of 20 degrees Declination Angle of 50 degrees
Turb
ulen
t Vis
cosi
ty a
t the
V
anes
Loc
atio
n [P
a-s]
Turb
ulen
t V
isco
sity
D
istri
butio
n at
the
Out
let [
Pa-s
] Tu
rbul
ent
Vis
cosi
ty D
istri
butio
n ov
er
the
Gap
Reg
ion
[Pa-
s]
189

Table A-7: Pressure fi ferent vane angles
Sub-Model
Mixing Vanes Declination of 20 degrees
eld distribution at dif
Mixing Vanes Declination of 50 degrees
Pres
sure
Fie
ld a
t the
Van
es
Loca
tion
[Pa]
Pr
essu
re F
ield
Abo
ve t
he V
anes
[P
a]
Table A-8: Turbulent Viscosity Distribution over the Subchannels Centroids Line
Sub-Model Mixing Vanes Declination of 20 degrees
Turb
ulen
t Vis
cosi
ty
Dis
tribu
tion
over
the
Subc
hann
els C
entro
ids
Line
[Pa-
s]
190
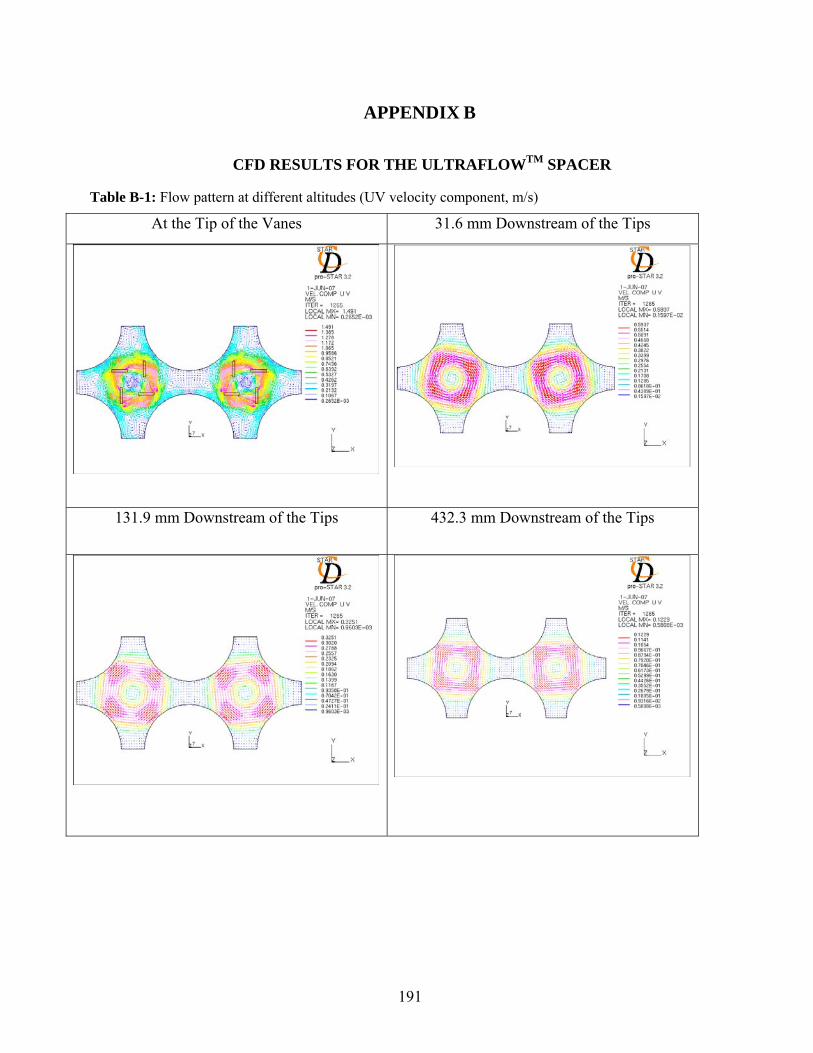
APPENDIX B
CFD RESULTS FOR THE UL TM SPACER
Table B-1: Flow pattern at different altitudes (UV velocity component, m/s)
At the Tip of the Vanes 31.6 mm Downstream of the Tips
TRAFLOW
131.9 mm Downstream of the Tips 432.3 mm Downstream of the Tips
191

Table B-2: Temperature distribution at different altitudes (in Kelvin)
f the VaAt the Tip o nes
131.9 432.3mm Downstream of the Tips mm Downstream of the Tips
192

Table B-3: Turbulent viscosity at different alt
At the Tip of the Vanes
itudes (in Pa-s)
31.6 mm Downstream of the Tips
13 wnstream of the Tips 432.3 mm Downstream of the Tips 1.9 mm Do
193

APPENDIX C
OEFFICIENT MULTIPLIER
ble C-1: Description of the format of the additional input deck with the CFD data for the mixing
Description
CFD DATA FOR THE MIXING C
Tamultiplier
Input Variable N1 – number of entrees for the 1 st independent Total number of axial positions variable N2 – number of entrees for the 2nd independent Total number of different mixing vane
angles variable N3 – number of entrees for the 3 rd independent Dummy variables N4 – number of entrees for the 4 th independent Dummy variables NSET – number of data sets to be read Corresponds to the number of different
subchannel configurations N2_1 – 1 entree of the 2 independenst nd t variable 1st value of the vane angle N2_n – n entree of the 2 independenth nd t variable nth value of the vane angle V_N1 – entree of the independent variable N1 ith axial position V_Nn_1 – value of the dependent variable at a Spacer multiplier for the 1st vane angle
at the ith axial position given combination of N1 and Nn_1 V_Nn_n – value of the dependent variable at a Spacer multiplier for the nth vane angle
at the ith axial position given combination of N1 and Nn_n
194

Table C-2: Example for the CFD data set for the 2×1 case
******
****** N4 0
750 1.032 1.246 1.342 1.267 1.349 815 1.032 1.246 1.342 1.267 1.349
0.845 0.819 1.232 1.679 1.568 1.604 0.875 1.042 1.295 1.322 1.358 1.565 0.905 1.143 0.864 0.959 1.056 1.214 0.935 0.969 0.945 1.399 1.364 1.674 0.965 0.951 1.183 1.470 1.350 1.719 0.995 1.035 1.170 1.298 1.218 1.518 1.025 1.129 1.123 1.182 1.114 1.370 1.055 1.174 1.106 1.157 1.075 1.338 1.085 1.175 1.115 1.174 1.096 1.342 1.115 1.155 1.135 1.197 1.131 1.339 1.145 1.131 1.157 1.218 1.158 1.333 1.175 1.108 1.177 1.239 1.179 1.330 1.205 1.087 1.195 1.258 1.200 1.329 1.235 1.066 1.214 1.279 1.221 1.333 1.265 1.048 1.231 1.304 1.243 1.342 1.295 1.032 1.246 1.342 1.267 1.349 1.360 1.032 1.246 1.342 1.267 1.349 1.390 0.819 1.232 1.679 1.568 1.604 1.420 1.042 1.295 1.322 1.358 1.565 1.450 1.143 0.864 0.959 1.056 1.214 1.480 0.969 0.945 1.399 1.364 1.674 1.510 0.951 1.183 1.470 1.350 1.719 1.540 1.035 1.170 1.298 1.218 1.518 1.570 1.129 1.123 1.182 1.114 1.370 1.600 1.174 1.106 1.157 1.075 1.338 1.630 1.175 1.115 1.174 1.096 1.342 1.660 1.155 1.135 1.197 1.131 1.339 1.690 1.131 1.157 1.218 1.158 1.333 1.720 1.108 1.177 1.239 1.179 1.330 1.750 1.087 1.195 1.258 1.200 1.329 1.780 1.066 1.214 1.279 1.221 1.333 1.810 1.048 1.231 1.304 1.243 1.342 1.840 1.032 1.246 1.342 1.267 1.349
*********************************************** 2D table for the spacer multiplier *********************************************** N1 N2 N3 89 5 0 * NSET 1 * N2_1 N2_2 N2_3 N2_4 N2_5 0.0 10.0 20.0 30.0 50.0 * V_N1 V_N2_1 V_N2_2 V_N2_3 V_N2_4 V_N2_5 0.000 1.000 1.000 1.000 1.000 1.000 0.225 1.000 1.000 1.000 1.000 1.000 0.240 1.032 1.246 1.342 1.267 1.349 0.270 1.032 1.246 1.342 1.267 1.349 0.300 0.819 1.232 1.679 1.568 1.604 0.330 1.042 1.295 1.322 1.358 1.565 0.360 1.143 0.864 0.959 1.056 1.214 0.390 0.969 0.945 1.399 1.364 1.674 0.420 0.951 1.183 1.470 1.350 1.719 0.450 1.035 1.170 1.298 1.218 1.518 0.480 1.129 1.123 1.182 1.114 1.370 0.510 1.174 1.106 1.157 1.075 1.338 0.540 1.175 1.115 1.174 1.096 1.342 0.570 1.155 1.135 1.197 1.131 1.339 0.600 1.131 1.157 1.218 1.158 1.333 0.630 1.108 1.177 1.239 1.179 1.330 0.660 1.087 1.195 1.258 1.200 1.329 0.690 1.066 1.214 1.279 1.221 1.333 0.720 1.048 1.231 1.304 1.243 1.342 0.0.
195

1.905 1.032 1.246 1.342 1.267 1.349
995 1.143 0.864 0.959 1.056 1.214
1.155 1.135 1.197 1.131 1.339 .218 1.158 1.333 .239 1.179 1.330 .258 1.200 1.329 .279 1.221 1.333 .304 1.243 1.342 .342 1.267 1.349 .342 1.267 1.349 .679 1.568 1.604 .322 1.358 1.565 .959 1.056 1.214 .399 1.364 1.674 .470 1.350 1.719 .298 1.218 1.518 .182 1.114 1.370 .157 1.075 1.338 .174 1.096 1.342 .197 1.131 1.339 .218 1.158 1.333 .239 1.179 1.330 .258 1.200 1.329 .279 1.221 1.333 .304 1.243 1.342 .342 1.267 1.349 .342 1.267 1.349
1.935 0.819 1.232 1.679 1.568 1.604 1.965 1.042 1.295 1.322 1.358 1.565 1.2.025 0.969 0.945 1.399 1.364 1.674
1.719 2.055 0.951 1.183 1.470 1.350 2.085 1.035 1.170 1.298 1.218 1.518 2.115 1.129 1.123 1.182 1.114 1.370 2.145 1.174 1.106 1.157 1.075 1.338
1.175 1.115 1.174 1.096 1.342 2.175 5 2.20
2.235 1.131 1.157 12.265 1.108 1.177 1
295 1.087 1.195 12.2.325 1.066 1.214 1
355 1.048 1.231 12.2.385 1.032 1.246 12.450 1.032 1.246 12.480 0.819 1.232 12.510 1.042 1.295 12.540 1.143 0.864 02.570 0.969 0.945 12.600 0.951 1.183 12.630 1.035 1.170 12.660 1.129 1.123 12.690 1.174 1.106 12.720 1.175 1.115 12.750 1.155 1.135 12.780 1.131 1.157 12.810 1.108 1.177 12.840 1.087 1.195 12.870 1.066 1.214 12.900 1.048 1.231 12.930 1.032 1.246 13.000 1.032 1.246 1
196

Table C-3: Example for the CFD data set for ULTRAFLOWTM spacer
**************************** r multiplier **************************** N2 N3 N4 2 0 0
.5347 1.0000 4.0587
.5647 1.0000 2.7668
.5947 1.0000 1.7056
.6247 1.0000 1.1480 1.6547 1.0000 0.9104 1.6847 1.0000 0.8245 1.7147 1.0000 0.8078 1.7447 1.0000 0.8212 1.7747 1.0000 0.8463 1.8047 1.0000 0.8747 1.8347 1.0000 0.9037 1.8647 1.0000 0.9330 1.8947 1.0000 0.9627 1.9247 1.0000 1.0032 1.9867 1.0000 1.0032 2.0167 1.0000 1.1260 2.0467 1.0000 4.0587 2.0767 1.0000 2.7668 2.1067 1.0000 1.7056
************************* 2D table for the space************************* N1 105 * NSET 1 * N2_1 N2_2 0.0 15.0 * * V_N1 V_N2_1 V_N2_2 * 0.0000 1.0000 1.0000 0.4507 1.0000 1.0000 0.4807 1.0000 1.1260 0.5107 1.0000 4.0587 0.5407 1.0000 2.7668 0.5707 1.0000 1.7056 0.6007 1.0000 1.1480 0.6307 1.0000 0.9104 0.6607 1.0000 0.8245 0.6907 1.0000 0.8078 0.7207 1.0000 0.8212 0.7507 1.0000 0.8463 0.7807 1.0000 0.8747 0.8107 1.0000 0.9037 0.8407 1.0000 0.9330 0.8707 1.0000 0.9627 0.9007 1.0000 1.0032 0.9627 1.0000 1.0032 0.9927 1.0000 1.1260 1.0227 1.0000 4.0587 1.0527 1.0000 2.7668 1.0827 1.0000 1.7056 1.1127 1.0000 1.1480 1.1427 1.0000 0.9104 1.1727 1.0000 0.8245 1.2027 1.0000 0.8078 1.2327 1.0000 0.8212 1.2627 1.0000 0.8463 1.2927 1.0000 0.8747 1.3227 1.0000 0.9037 1.3527 1.0000 0.9330 1.3827 1.0000 0.9627 1.4127 1.0000 1.0032 1.4747 1.0000 1.0032 1.5047 1.0000 1.1260 1111
197

2.1367 1.0000 1.1480 2.1667 1.0000 0.9104 2.1967 1.0000 0.8245 2.2267 1.0000 0.8078 2.2567 1.0000 0.8212 2.2867 1.0000 0.8463 2.3167 1.0000 0.8747 2.3467 1.0000 0.9037 2.3767 1.0000 0.9330 2.4067 1.0000 0.9627 2.4367 1.0000 1.0032 2.4987 1.0000 1.0032 2.5287 1.0000 1.1260 2.5587 1.0000 4.0587 2.5887 1.0000 2.7668 2.6187 1.0000 1.7056 2.6487 1.0000 1.1480 2.6787 1.0000 0.9104 2.7087 1.0000 0.8245 2.7387 1.0000 0.8078 2.7687 1.0000 0.8212 2.7987 1.0000 0.8463 2.8287 1.0000 0.8747 2.8587 1.0000 0.9037 2.8887 1.0000 0.9330 2.9187 1.0000 0.9627 2.9487 1.0000 1.0032 3.0107 1.0000 1.0032 3.0407 1.0000 1.1260 3.0707 1.0000 4.0587 3.1007 1.0000 2.7668 3.1307 1.0000 1.7056 3.1607 1.0000 1.1480 3.1907 1.0000 0.9104 3.2207 1.0000 0.8245 3.2507 1.0000 0.8078 3.2807 1.0000 0.8212 3.3107 1.0000 0.8463 3.3407 1.0000 0.8747 3.3707 1.0000 0.9037 3.4007 1.0000 0.9330 3.4307 1.0000 0.9627 3.4607 1.0000 1.0032 3.52273.55273.5827 1.0000 4.0587 3.6127 1.0000 2.7668 3.6427 1.0000 1.7056 3.6727 1.0000 1.1480 3.7027 1.0000 0.9104 3.7080 1.0000 0.8245
1.0000 1.0032 1.0000 1.1260
198

Spacer Grid Multiplier Θ SG
test_sg_mult.out
VDRIFT
SG_MULTIPLIER
Reads the CFD dsg_mult_data
olation subroutine Defines the spacer grid multiplier for the mixing coefficient
multiplier in an additional output file
ata set – input file
Calls the interp
Writes the evaluated spacer grid
test_sg_mult.out
IXFLOW = 2 or 3
YES
Axial height of the F-COBRA-TF momentum cell and Mixing vanes’ angle
Spacer grid multiplier for the given height and angle as defined after linear
Interpolation SubroutinePerforms linear interpolation between values given in the CFD data set
XSCHEM XSCHEM – solves F-COBRA-TF conservation equations
r modeling of the enhanced turbulent mixing and directed crossflow
IXFLOW = 2 – only enhanced turbulent mixing modeling will be activated;
IXFLOW = 3 – both modeling options will be activated
SG_MULTIPLIER – evaluates spacer grid
VDRIFT – calculates turbulent mixing and void drift source terms
IXFLOW – input flag fo
multiplier ΘSG
test_sg_mult
ced ixFigure C-1: Flow chart of the modeling of the enhan turbulent m ing due to mixing vanes
199

APPENDIX D
EVALUATION OF THE TPREDICTIONS FOR THE VELOCITY CURL
andidate 1:
RANSVERSE MOMENTUM CHANGE BY MEANS OF CFD
C
the velocity curl in a lateral plane, Knowing
⎟⎟⎠
⎞⎜⎛ ∂∂ vv yzr⎜⎝ ∂
−∂
==×∇zy
vcurlvx
)( , (A.1)
a body force can be calculated as
xAvvF x ∆×∇= ρ)( , (A.2)
where xv is the xial velocity in the fluid do ain and a m ρ is its density as both calculated by F-
COBRA-TF, A is the area on which the force is acting and x∆ is the axial dimension of the
domain for a particular case.
We can assume that the area A is equal to , where 2RA π= R is the distance between the
center of the subchannel and the rod surface (see Figure D-1).
R
Figure D-1: Schematic of the model for evaluation of the lateral momentum change by velocity curl
200

The momentum change I& in the latera time interval is then defined as: l direction y over a t∆
xA ∆ρ . vvFtII xlat ×∇=≡
∆∆
= )(& (A.3)
Candidate 2:
The pressure gradient over the radius R in Figure D-1 can be given as
32143421 gravity
force lcentrofuga
22
21 hgRP ρρω +=∆ (A.4)
where ρ is the density of the medium; R is the distance between the center of the subchannel and
the rod surface; ω is the angular velocity; and g is the gravitational constant.
sing the relaNeglecting the gravity term and u tion between the angular velocity ω and the
velocity curl, 4
)( v×∇=ω , the pressure gradient becomes
2222 )(81
21 RvRP ×∇==∆ ρρω , (A.5)
Then the lateral momentum change by the force acting on the fluid at the gap area (lateral area
, where is the rod-to-rod distance) due to the pressure gradient xSA ijlat ∆= ijS P∆ will be
xSRvAPFtII ijlatlat ∆×∇=∆=≡∆∆
= 22)(81 ρ& . (A.6)
201

APPENDIX E
CFD RESULTS FOR THE FOCUSTM SPACER
Table E-1: Lateral (UW) velocities field immediately downstream of the mixing vanes
10 degree, local maximum of 0.9245 m/s 20 degree, local maximum of 1.782 m/s
30 degree, local maximum of 2.483 m/s 40 degree, local maximum of 2.846 m/s
202

Table E-2: Lateral velocity field further downstream of the spacer
20 degree 0.330 m
30 degree 0.330 m
40 degree 0.430 m
203

Table E-3: Lateral velocities field at the position of ‘velocity inversion’ 20 degree 0.375 m
30 degree 0.395 m
40 degree 0.445 m
204

UW Velocity10 degree
-0,4
-0,3
-0,2
-0,1
0,0
0,1
0,2
0,3
0,4
0 100 200 300 400 500 600
Height, mm
Velo
city
, m/s north
southwesteast
north
southeastwest
Figure E-1: Axial distribution of the lateral (UW) velocity for FOCUSTM spacer with mixing vanes of 10°
UW Velocity20 degree
-1,00
-0,80
-0,60
-0,40
-0,20
0,00
0,20
0,40
0,60
0,80
1,00
0 100 200 300 400 500 600
Height, mm
Vel
ocity
, m/s east
westnortsouth
north
southeastwest
Figure E-2: Axial distribution of the lateral (UW) velocity for FOCUSTM spacer with mixing vanes of 20°
205

UW Velocity30 degree
-0,5
0,5
1,0
1,5
Velo
/s east
0,0
city
, m west
-1,5
-1,0
0 100 200 300 400 500
Height, mm
600
southnorth
north
southeastwest
Figur ixing vanes of 30°
e E-3: Axial distribution of the lateral (UW) velocity for FOCUSTM spacer with m
UW Velocity40 degree
-2,00
-1,50
0
Height, mm
Vel
ocity
, m/s
-1,00
-0,500 100 200 300 400 5
0,00
0,50
1,00
1,50
2,00
0 600
eastwestnorthsouth
north
Figure E-4: Axial distribution of the lateral (UW) velocity for FOCUSTM spacer with mixing vanes of 40°
southeastwest
206

ONVECTION FACTOR
at of the additional input deck with the CFD data for the lateral
Description
APPENDIX F
CFD DATA FOR THE LATERAL C
Table F-1: Description of the formconvection factor
Input Variable N1 – number of entrees for the 1st independent Total number of axial positions variable N2 – number of entrees for the 2nd independent Total number of different mixing vane
angles variable N3 – number of entrees for the 3rd independent Dummy variables N4 – number of entrees for the 4th independent Dummy variables NSET – number of data sets to be read Corresponds to the number of different
subchannel configurations N2_1 – 1 entree of the 2 indst nd ependent variable 1st value of the vane angle N2_n – n entree of the 2 indth nd ependent variable nth value of the vane angle V_N1 – entree of the independent variable N1 ith axial position V_Nn_1 – value of the dependent variable at a
n_1 Spacer multiplier for the 1st vane angle at the ith axial position given combination of N1 and N
V_Nn_n – value of the dependent variable at a n_n
Spacer multiplier for the nth vane angle at the ith axial position given combination of N1 and N
207

Table F-2: Example for the CFD data set for the FOCUSTM spacer ************** or ************** N3 N4 0 0
*************************************** 2D table for lateral convection fact*************************************** N1 N2 260 4 * NSET 1 * N2_1 N2_2 N2_3 N2_4 10.0 20.0 30.0 40.0 * V_N1 V_N2_1 V_N2_2 V_N2_3 V_N2_4 0.00 0.0000 0.0000 0.0000 0.0000 0.23 0.0001 0.0001 0.0001 0.0001 0.24 0.0001 0.0001 0.0001 0.0001 0.25 0.0001 0.0001 0.0001 0.0001 0.26 0.0001 0.0001 0.0001 0.0001 0.27 0.0002 0.0002 0.0002 0.0002 0.28 0.0002 0.0002 0.0002 0.0002 0.29 0.0001 0.0001 0.0001 0.0001 0.30 0.0001 0.0001 0.0001 0.0001 0.31 0.0012 0.0026 0.0033 0.0039 0.32 0.0139 0.0430 0.0839 0.1282 0.33 0.0282 0.1198 0.2012 0.2689 0.34 0.0396 0.1496 0.2517 0.3428 0.35 0.0480 0.1693 0.2756 0.3473 0.36 0.0537 0.1763 0.2629 0.3265 0.37 0.0575 0.1667 0.2421 0.3117 0.38 0.0605 0.1499 0.2262 0.2912 0.39 0.0630 0.1327 0.2086 0.2620 0.40 0.0647 0.1186 0.1867 0.2325 0.41 0.0652 0.1076 0.1654 0.2068 0.42 0.0645 0.0982 0.1486 0.1837 0.43 0.0630 0.0900 0.1367 0.1646 0.44 0.0610 0.0832 0.1278 0.1512 0.45 0.0586 0.0782 0.1208 0.1432 0.46 0.0563 0.0749 0.1154 0.1383 0.47 0.0538 0.0725 0.1108 0.1341 0.48 0.0514 0.0707 0.1070 0.1303 0.49 0.0493 0.0692 0.1038 0.1272 0.50 0.0472 0.0674 0.1008 0.1244 0.51 0.0454 0.0655 0.0980 0.1221 0.52 0.0439 0.0636 0.0958 0.1202 0.53 0.0424 0.0615 0.0937 0.1184 0.54 0.0411 0.0594 0.0919 0.1167 0.55 0.0399 0.0575 0.0903 0.1152 0.56 0.0387 0.0555 0.0888 0.1136 0.57 0.0375 0.0535 0.0872 0.1119 0.58 0.0365 0.0515 0.0856 0.1100 0.59 0.0354 0.0494 0.0836 0.1077 0.60 0.0344 0.0491 0.0814 0.1049 0.61 0.0335 0.0506 0.0788 0.1019 0.62 0.0326 0.0531 0.0765 0.0981 0.63 0.0317 0.0552 0.0761 0.0938 0.64 0.0309 0.0568 0.0753 0.0892 0.65 0.0302 0.0581 0.0740 0.0836 0.66 0.0295 0.0589 0.0721 0.0774 0.67 0.0289 0.0593 0.0699 0.0720 0.68 0.0283 0.0593 0.0669 0.0694 0.69 0.0277 0.0589 0.0643 0.0667 0.70 0.0272 0.0582 0.0641 0.0658 0.71 0.0267 0.0572 0.0637 0.0659 0.72 0.0261 0.0560 0.0632 0.0658 0.73 0.0256 0.0547 0.0625 0.0656 0.74 0.0250 0.0533 0.0617 0.0652 0.75 0.0244 0.0519 0.0608 0.0646 0.76 0.0238 0.0509 0.0596 0.0638 0.83 0.0238 0.0509 0.0596 0.0638
208

0.84 0.0238 0.0509 0.0596 0.0638 0.85 0.0238 0.0509 0.0596 0.0638 0.86 0.0238 0.0509 0.0596 0.0638 0.87 0.0238 0.0509 0.0596 0.0638 0.88 0.0238 0.0509 0.0596 0.0638 0.89 0.0282 0.1198 0.2012 0.2689 0.90 0.0396 0.1496 0.2517 0.3428 0.91 0.0480 0.1693 0.2756 0.3473 0.92 0.0537 0.1763 0.2629 0.3265 0.93 0.0575 0.1667 0.2421 0.3117 0.94 0.0605 0.1499 0.2262 0.2912 0.95 0.0630 0.1327 0.2086 0.2620 0.96 0.0647 0.1186 0.1867 0.2325 0.97 0.0652 0.1076 0.1654 0.2068 0.98 0.0645 0.0982 0.1486 0.1837 0.99 0.0630 0.0900 0.1367 0.1646 1.00 0.0610 0.0832 0.1278 0.1512 1.01 0.0586 0.0782 0.1208 0.1432 1.02 0.0563 0.0749 0.1154 0.1383 1.03 0.0538 0.0725 0.1108 0.1341 1.04 0.0514 0.0707 0.1070 0.1303 1.05 0.0493 0.0692 0.1038 0.1272 1.06 0.0472 0.0674 0.1008 0.1244 1.07 0.0454 0.0655 0.0980 0.1221 1.08 0.0439 0.0636 0.0958 0.1202 1.09 0.0424 0.0615 0.0937 0.1184 1.10 0.0411 0.0594 0.0919 0.1167 1.11 0.0399 0.0575 0.0903 0.1152 1.12 0.0387 0.0555 0.0888 0.1136 1.13 0.0375 0.0535 0.0872 0.1119 1.14 0.0365 0.0515 0.0856 0.1100 1.15 0.0354 0.0494 0.0836 0.1077 1.16 0.0344 0.0491 0.0814 0.1049 1.17 0.0335 0.0506 0.0788 0.1019 1.18 0.0326 0.0531 0.0765 0.0981 1.19 0.0317 0.0552 0.0761 0.0938 1.20 0.0309 0.0568 0.0753 0.0892 1.21 0.0302 0.0581 0.0740 0.0836 1.22 0.0295 0.0589 0.0721 0.0774 1.23 0.0289 0.0593 0.0699 0.0720 1.24 0.0283 0.0593 0.0669 0.0694 1.25 0.0277 0.0589 0.0643 0.0667 1.26 0.0272 0.0582 0.0641 0.0658 1.27 0.0267 0.0572 0.0637 0.0659 1.28 0.0261 0.0560 0.0632 0.0658 1.29 0.0256 0.0547 0.0625 0.0656 1.30 0.0250 0.0533 0.0617 0.0652 1.31 0.0244 0.0519 0.0608 0.0646 1.32 0.0238 0.0509 0.0596 0.0638 1.37 0.0238 0.0509 0.0596 0.0638 1.38 0.0238 0.0509 0.0596 0.0638 1.39 0.0238 0.0509 0.0596 0.0638 1.40 0.0238 0.0509 0.0596 0.0638 1.41 0.0238 0.0509 0.0596 0.0638 1.42 0.0238 0.0509 0.0596 0.0638 1.43 0.0282 0.1198 0.2012 0.2689 1.44 0.0396 0.1496 0.2517 0.3428 1.45 0.0480 0.1693 0.2756 0.3473 1.46 0.0537 0.1763 0.2629 0.3265 1.47 0.0575 0.1667 0.2421 0.3117 1.48 0.0605 0.1499 0.2262 0.2912 1.49 0.0630 0.1327 0.2086 0.2620 1.50 0.0647 0.1186 0.1867 0.2325 1.51 0.0652 0.1076 0.1654 0.2068 1.52 0.0645 0.0982 0.1486 0.1837 1.53 0.0630 0.0900 0.1367 0.1646 1.54 0.0610 0.0832 0.1278 0.1512 1.55 0.0586 0.0782 0.1208 0.1432 1.56 0.0563 0.0749 0.1154 0.1383 1.57 0.0538 0.0725 0.1108 0.1341 1.58 0.0514 0.0707 0.1070 0.1303
209

1.59 0.0493 0.0692 0.1038 0.1272 1.60 0.0472 0.0674 0.1008 0.1244 1.61 0.0454 0.0655 0.0980 0.1221 1.62 0.0439 0.0636 0.0958 0.1202 1.63 0.0424 0.0615 0.0937 0.1184 1.64 0.0411 0.0594 0.0919 0.1167 1.65 0.0399 0.0575 0.0903 0.1152 1.66 0.0387 0.0555 0.0888 0.1136 1.67 0.0375 0.0535 0.0872 0.1119 1.68 0.0365 0.0515 0.0856 0.1100 1.69 0.0354 0.0494 0.0836 0.1077 1.70 0.0344 0.0491 0.0814 0.1049 1.71 0.0335 0.0506 0.0788 0.1019 1.72 0.0326 0.0531 0.0765 0.0981 1.73 0.0317 0.0552 0.0761 0.0938 1.74 0.0309 0.0568 0.0753 0.0892 1.75 0.0302 0.0581 0.0740 0.0836 1.76 0.0295 0.0589 0.0721 0.0774 1.77 0.0289 0.0593 0.0699 0.0720 1.78 0.0283 0.0593 0.0669 0.0694 1.79 0.0277 0.0589 0.0643 0.0667 1.80 0.0272 0.0582 0.0641 0.0658 1.81 0.0267 0.0572 0.0637 0.0659 1.82 0.0261 0.0560 0.0632 0.0658 1.83 0.0256 0.0547 0.0625 0.0656 1.84 0.0250 0.0533 0.0617 0.0652 1.85 0.0244 0.0519 0.0608 0.0646 1.86 0.0238 0.0509 0.0596 0.0638 1.92 0.0238 0.0509 0.0596 0.0638 1.93 0.0238 0.0509 0.0596 0.0638 1.94 0.0238 0.0509 0.0596 0.0638 1.95 0.0238 0.0509 0.0596 0.0638 1.96 0.0238 0.0509 0.0596 0.0638 1.97 0.0238 0.0509 0.0596 0.0638 1.98 0.0282 0.1198 0.2012 0.2689 1.99 0.0396 0.1496 0.2517 0.3428 2.00 0.0480 0.1693 0.2756 0.3473 2.01 0.0537 0.1763 0.2629 0.3265 2.02 0.0575 0.1667 0.2421 0.3117 2.03 0.0605 0.1499 0.2262 0.2912 2.04 0.0630 0.1327 0.2086 0.2620 2.05 0.0647 0.1186 0.1867 0.2325 2.06 0.0652 0.1076 0.1654 0.2068 2.07 0.0645 0.0982 0.1486 0.1837 2.08 0.0630 0.0900 0.1367 0.1646 2.09 0.0610 0.0832 0.1278 0.1512 2.10 0.0586 0.0782 0.1208 0.1432 2.11 0.0563 0.0749 0.1154 0.1383 2.12 0.0538 0.0725 0.1108 0.1341 2.13 0.0514 0.0707 0.1070 0.1303 2.14 0.0493 0.0692 0.1038 0.1272 2.15 0.0472 0.0674 0.1008 0.1244 2.16 0.0454 0.0655 0.0980 0.1221 2.17 0.0439 0.0636 0.0958 0.1202 2.18 0.0424 0.0615 0.0937 0.1184 2.19 0.0411 0.0594 0.0919 0.1167 2.20 0.0399 0.0575 0.0903 0.1152 2.21 0.0387 0.0555 0.0888 0.1136 2.22 0.0375 0.0535 0.0872 0.1119 2.23 0.0365 0.0515 0.0856 0.1100 2.23 0.0354 0.0494 0.0836 0.1077 2.24 0.0344 0.0491 0.0814 0.1049 2.25 0.0335 0.0506 0.0788 0.1019 2.26 0.0326 0.0531 0.0765 0.0981 2.27 0.0317 0.0552 0.0761 0.0938 2.28 0.0309 0.0568 0.0753 0.0892 2.29 0.0302 0.0581 0.0740 0.0836 2.30 0.0295 0.0589 0.0721 0.0774 2.31 0.0289 0.0593 0.0699 0.0720 2.32 0.0283 0.0593 0.0669 0.0694 2.33 0.0277 0.0589 0.0643 0.0667
210
2.34 0.0272 0.0582 0.0641 0.0658 2.35 0.0267 0.0572 0.0637 0.0659 2.36 0.0261 0.0560 0.0632 0.0658 2.37 0.0256 0.0547 0.0625 0.0656 2.38 0.0250 0.0533 0.0617 0.0652 2.39 0.0244 0.0519 0.0608 0.0646 2.40 0.0238 0.0509 0.0596 0.0638 2.46 0.0238 0.0509 0.0596 0.0638 2.47 0.0238 0.0509 0.0596 0.0638 2.48 0.0238 0.0509 0.0596 0.0638 2.49 0.0238 0.0509 0.0596 0.0638 2.50 0.0238 0.0509 0.0596 0.0638 2.51 0.0238 0.0509 0.0596 0.0638 2.52 0.0282 0.1198 0.2012 0.2689 2.53 0.0396 0.1496 0.2517 0.3428 2.54 0.0480 0.1693 0.2756 0.3473 2.55 0.0537 0.1763 0.2629 0.3265 2.56 0.0575 0.1667 0.2421 0.3117 2.57 0.0605 0.1499 0.2262 0.2912 2.58 0.0630 0.1327 0.2086 0.2620 2.59 0.0647 0.1186 0.1867 0.2325 2.60 0.0652 0.1076 0.1654 0.2068 2.61 0.0645 0.0982 0.1486 0.1837 2.62 0.0630 0.0900 0.1367 0.1646 2.63 0.0610 0.0832 0.1278 0.1512 2.64 0.0586 0.0782 0.1208 0.1432 2.65 0.0563 0.0749 0.1154 0.1383 2.66 0.0538 0.0725 0.1108 0.1341 2.67 0.0514 0.0707 0.1070 0.1303 2.68 0.0493 0.0692 0.1038 0.1272 2.69 0.0472 0.0674 0.1008 0.1244 2.70 0.0454 0.0655 0.0980 0.1221 2.71 0.0439 0.0636 0.0958 0.1202 2.72 0.0424 0.0615 0.0937 0.1184 2.73 0.0411 0.0594 0.0919 0.1167 2.74 0.0399 0.0575 0.0903 0.1152 2.75 0.0387 0.0555 0.0888 0.1136 2.76 0.0375 0.0535 0.0872 0.1119 2.77 0.0365 0.0515 0.0856 0.1100 2.78 0.0354 0.0494 0.0836 0.1077 2.79 0.0344 0.0491 0.0814 0.1049 2.80 0.0335 0.0506 0.0788 0.1019 2.81 0.0326 0.0531 0.0765 0.0981 2.82 0.0317 0.0552 0.0761 0.0938 2.83 0.0309 0.0568 0.0753 0.0892 2.84 0.0302 0.0581 0.0740 0.0836 2.85 0.0295 0.0589 0.0721 0.0774 2.86 0.0289 0.0593 0.0699 0.0720 2.87 0.0283 0.0593 0.0669 0.0694 2.88 0.0277 0.0589 0.0643 0.0667 2.89 0.0272 0.0582 0.0641 0.0658 2.90 0.0267 0.0572 0.0637 0.0659 2.91 0.0261 0.0560 0.0632 0.0658 2.92 0.0256 0.0547 0.0625 0.0656 2.93 0.0250 0.0533 0.0617 0.0652 2.94 0.0244 0.0519 0.0608 0.0646 2.95 0.0238 0.0509 0.0596 0.0638 2.96 0.0238 0.0509 0.0596 0.0638 2.97 0.0238 0.0509 0.0596 0.0638 2.98 0.0238 0.0509 0.0596 0.0638 2.99 0.0238 0.0509 0.0596 0.0638 3.00 0.0238 0.0509 0.0596 0.0638
211

212
DIRECTED_CROSSFLOW Reads input data for orientation of directed crossflows Calls XFLOW to define the lateral convection factor Evaluates the force to be added as a source term to the lateral momentum equation
IXFLOW = 1 or 3
YES
XFLOW Reads the CFD data set – input file xflow_data Calls the interpolation subroutine Writes the evaluated lateral convection factor in an additional output file test_xlow.out
Axial height of the F-COBRA-TF momentum cell and Mixing vanes’ angle
Lateral convection factor for the given height and angle as interpolated by LINT4D
Source term Flat_conv_sg
test_xflow.out
xflow_data
Interpolation SubroutinePerforms linear interpolation between values given in the CFD data set
dirct_data_inp
XSCHEM XSCHEM – solves F-COBRA-TF conservation equations
DIRECTED_CROSSFLOW – calculates the source term Flat_conv_sg
IXFLOW – input flag for modeling of the enhanced turbulent mixing and directed crossflow
IXFLOW = 1 – only directed crossflow modeling will be activated;
IXFLOW = 3 – both modeling options will be activated
Figure F-1: Flow chart of the modeling of the directed crossflow

Vita
Maria Avramova was born in Zlatograd, Bulgaria on August 21, 1968. Maria received her M.S.
degree in Nuclear Technique and Nuclear Energy from the Sofia University “St. Kliment
Ohridski”, Sofia, Bulgaria in December of 1993. She started her job as a physicist in the
Department of Thermal-Hydraulics and Reactor Safety of the Institute for Nuclear Research and
Nuclear Energy, Bulgarian Academy of Science, Sofia, Bulgaria on October 1994. Maria began
post graduate studies in Nuclear Engineering at the Pennsylvania State University in January,
2001, where she received her M.S. in August, 2003. Maria Avramova continued her study at the
Pennsylvania State University and earned her Ph.D. degree in Nuclear Engineering in December,
2007.