Embed Size (px)
Citation preview
Detection Theory
Chapter 4: Deterministic Signals
”Fundamentals of Statistical Signal Processing”
Taimoor Abbas
1
Contents
• Neyman‐Pearson (NP) detector
• Matched Filter
• Detection Performance
• What if Gaussian noise is not white?
• Multiple Signals
• Linear Model
2
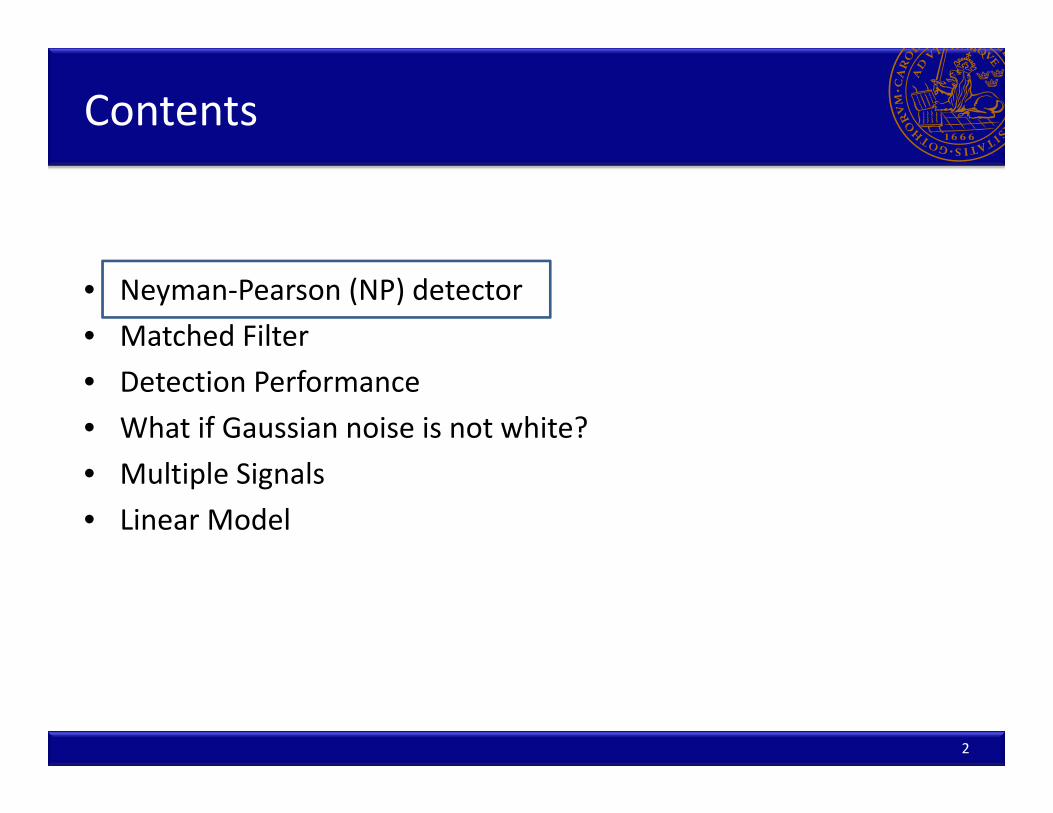
Neyman‐Pearson Detector
The detection problem is to distinguish between the hypothesis,
NP detector decides H if likelihood ratio exceeds a thresholdNP detector decides H1 if likelihood ratio exceeds a threshold,
Since
We have
3
Neyman‐Pearson Detector
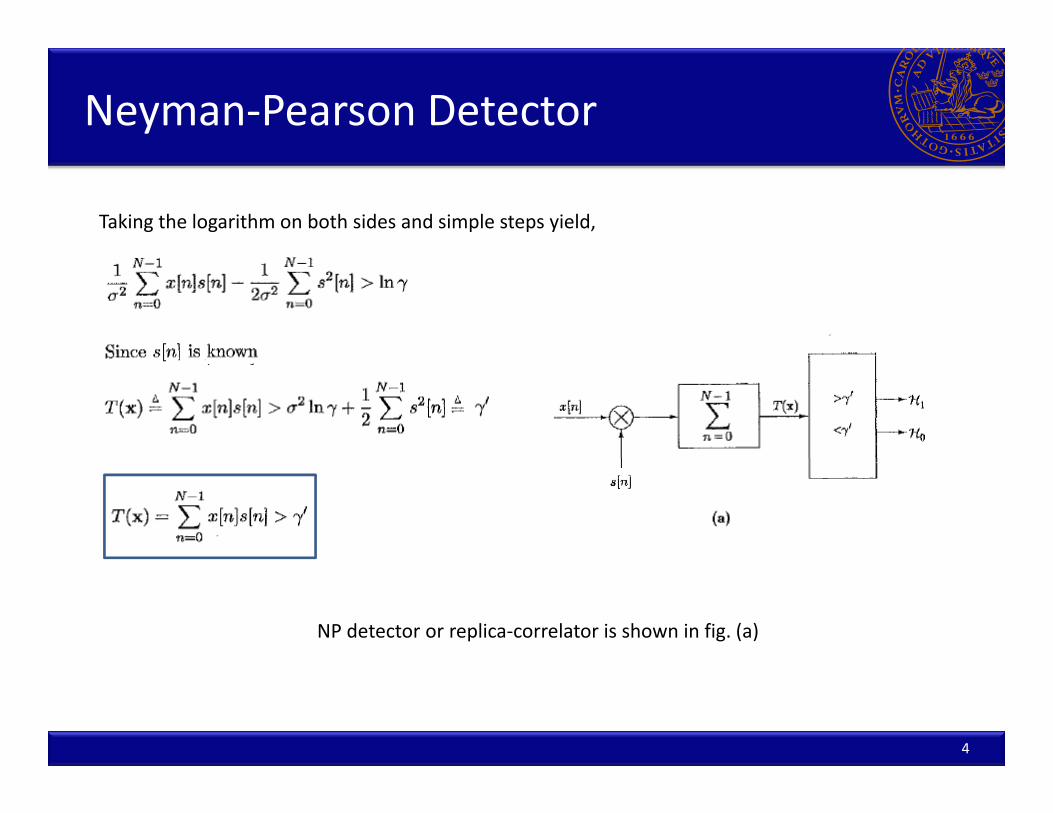
Taking the logarithm on both sides and simple steps yield,
NP detector or replica‐correlator is shown in fig. (a)
4
Contents
• Neyman‐Pearson (NP) detector
• Matched Filter
• Detection Performance
• What if Gaussian noise is not white?
• Multiple Signals
• Linear Model
5
Matched Filter
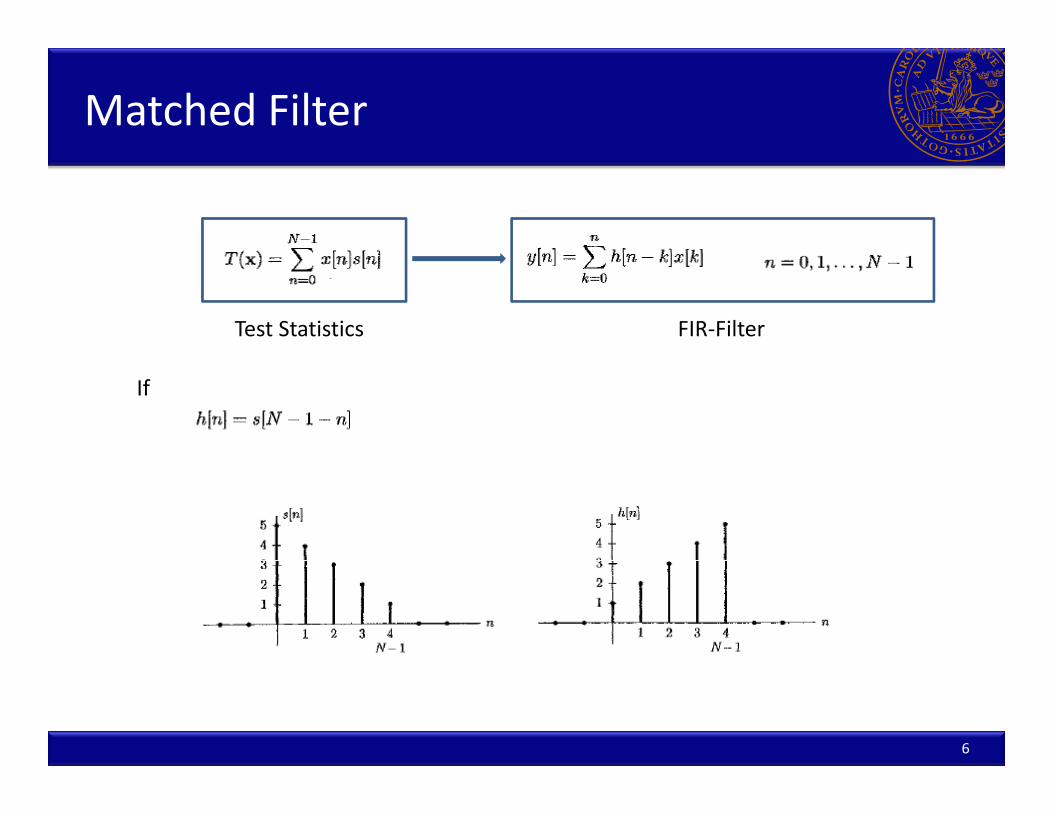
Test Statistics FIR‐Filter
If
6
Matched Filter
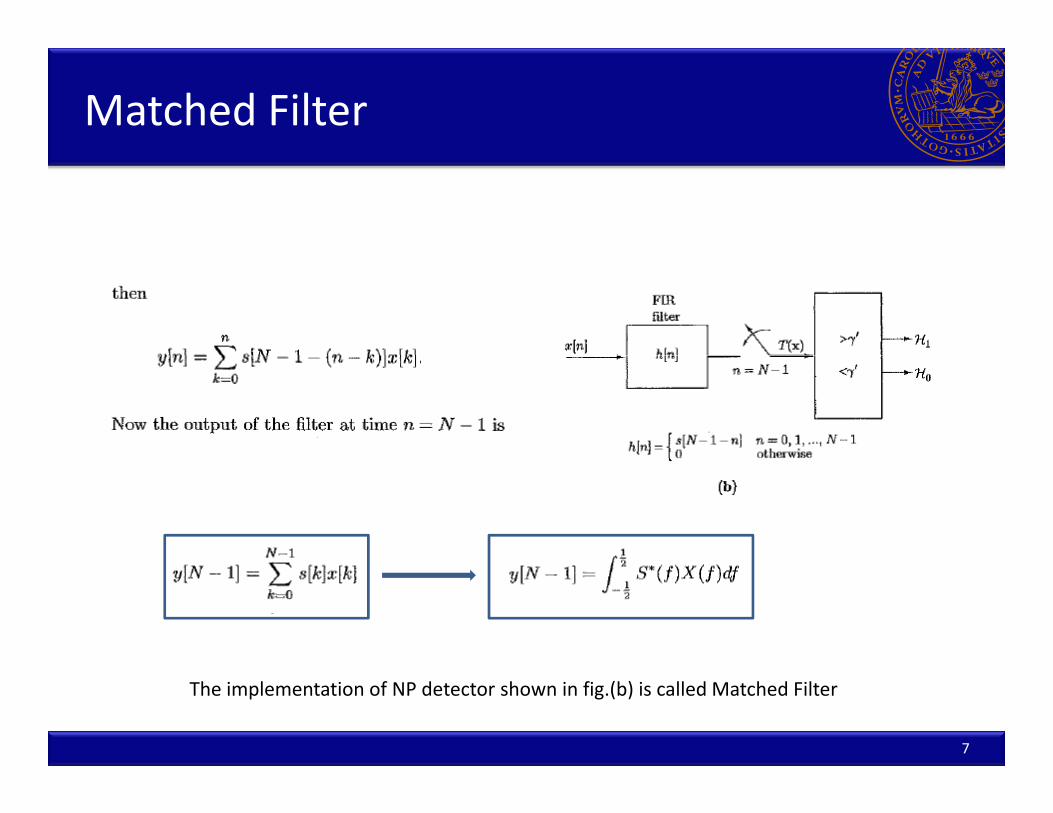
The implementation of NP detector shown in fig.(b) is called Matched Filter
7
Matched Filter ‐ Facts
• When the noise is absent, matched filter output is just signal energy i.e.
• For nonGaussian noise matched filter is not optimal
• Matched filter maximizes the SNR at the output of an FIR (also IIR) filter (even if the noise is nonGaussian)IIR) filter (even if the noise is nonGaussian)
8
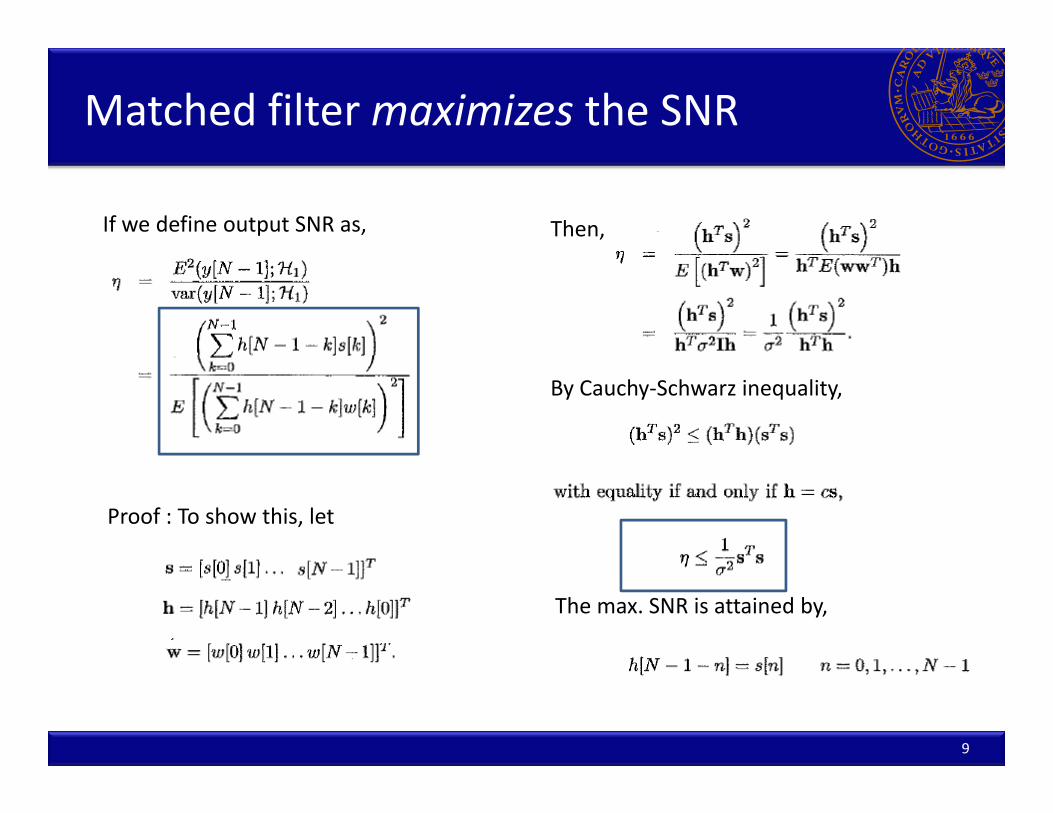
Matched filter maximizes the SNR
If we define output SNR as, Then,
By Cauchy‐Schwarz inequality,
Proof : To show this, let
The max. SNR is attained by,
9
Contents
• Neyman‐Pearson (NP) detector
• Matched Filter
• Detection Performance
• What if Gaussian noise is not white?
• Multiple Signals
• Linear Model
10
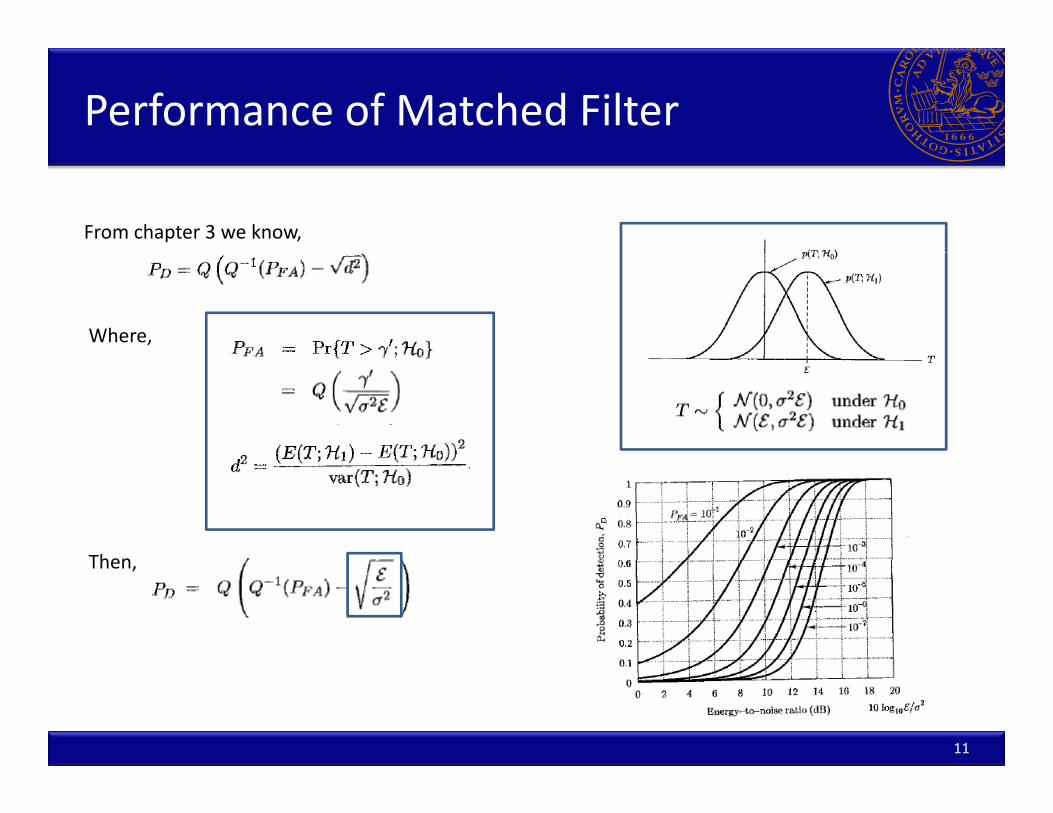
Performance of Matched Filter
From chapter 3 we know,
Where,
ThenThen,
11
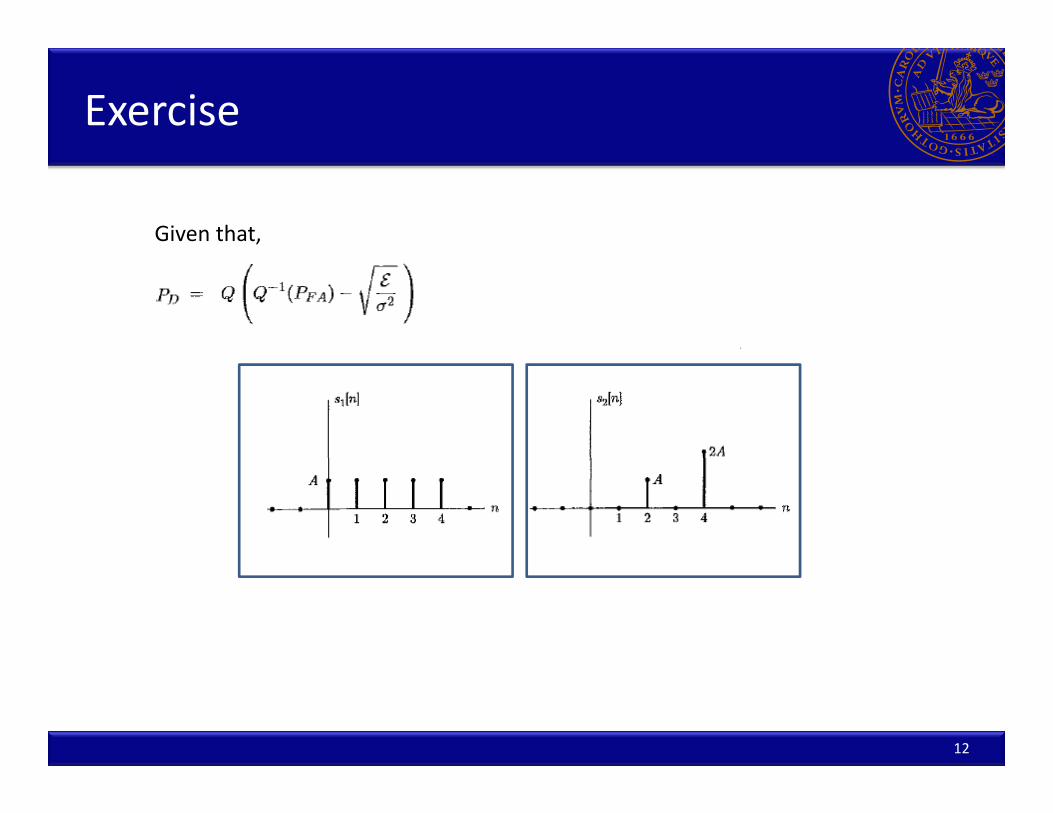
Exercise
Given that,
12
Contents
• Neyman‐Pearson (NP) detector
• Matched Filter
• Detection Performance
• What if Gaussian noise is not white?
• Multiple Signals
• Linear Model
13
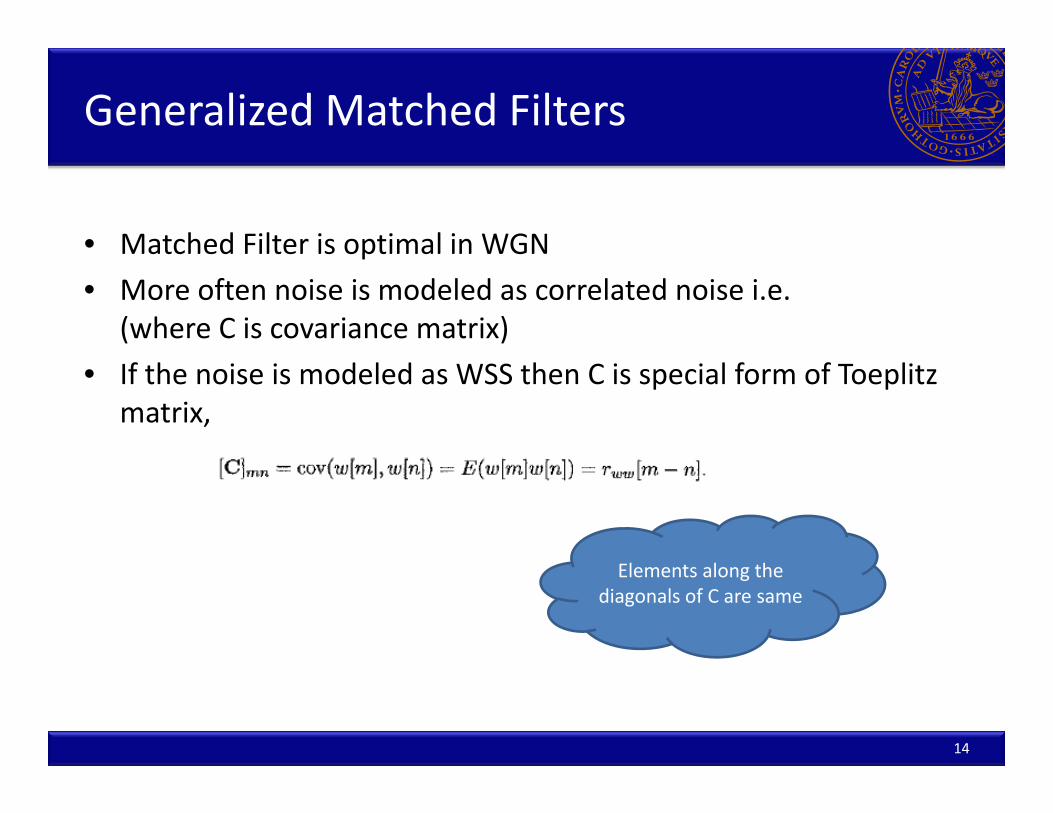
Generalized Matched Filters
• Matched Filter is optimal in WGNMatched Filter is optimal in WGN
• More often noise is modeled as correlated noise i.e. (where C is covariance matrix)
• If the noise is modeled as WSS then C is special form of Toeplitz matrix,
Elements along the diagonals of C are same
14
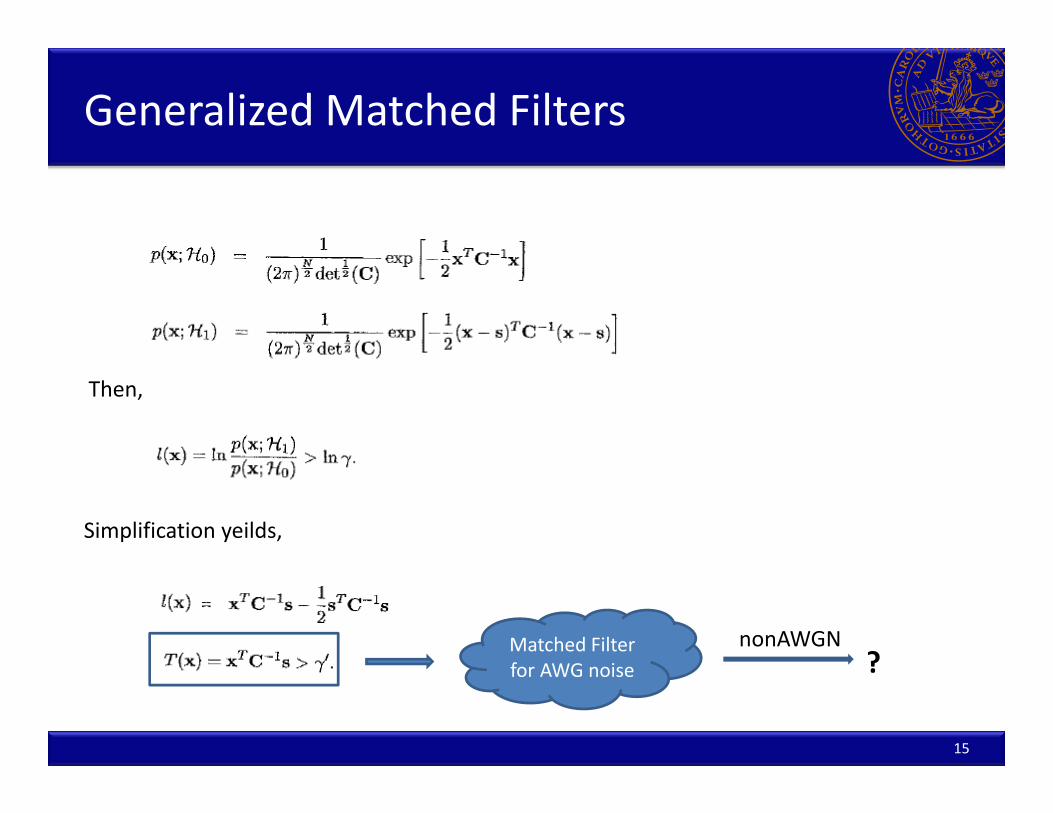
Generalized Matched Filters
Then,
Simplification yeilds,
Matched Filter f G i
nonAWGN?
15
for AWG noise ?
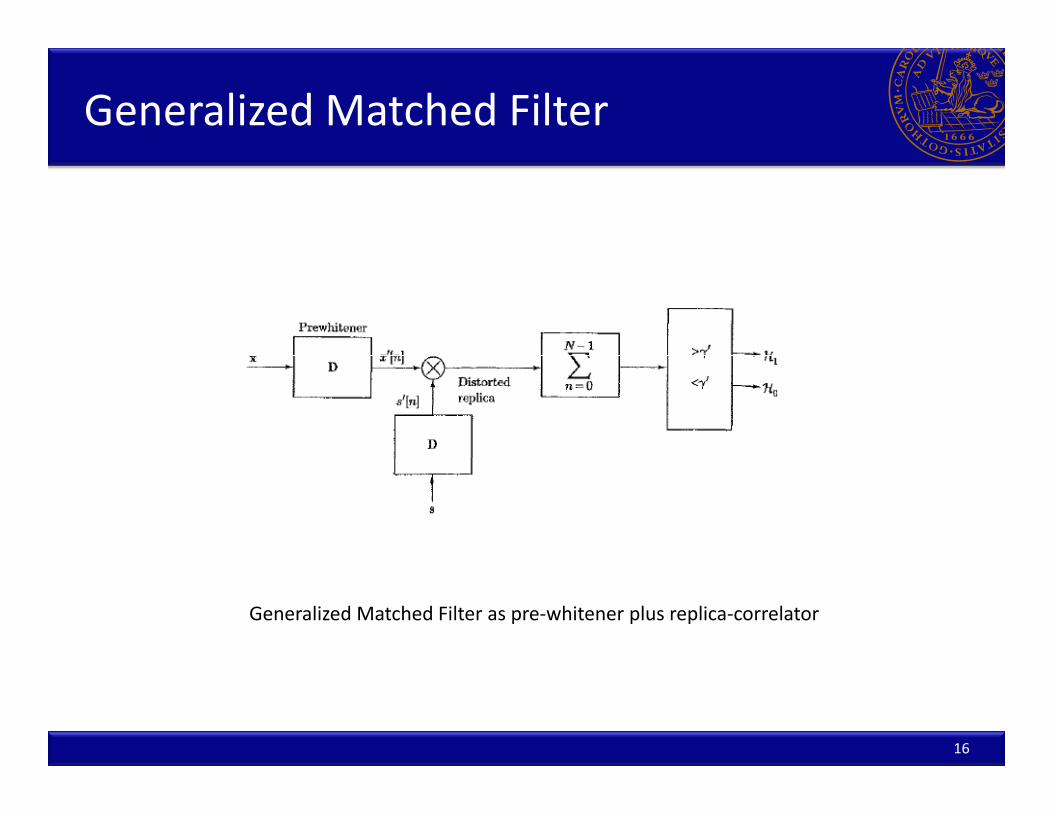
Generalized Matched Filter
Generalized Matched Filter as pre‐whitener plus replica‐correlator
16
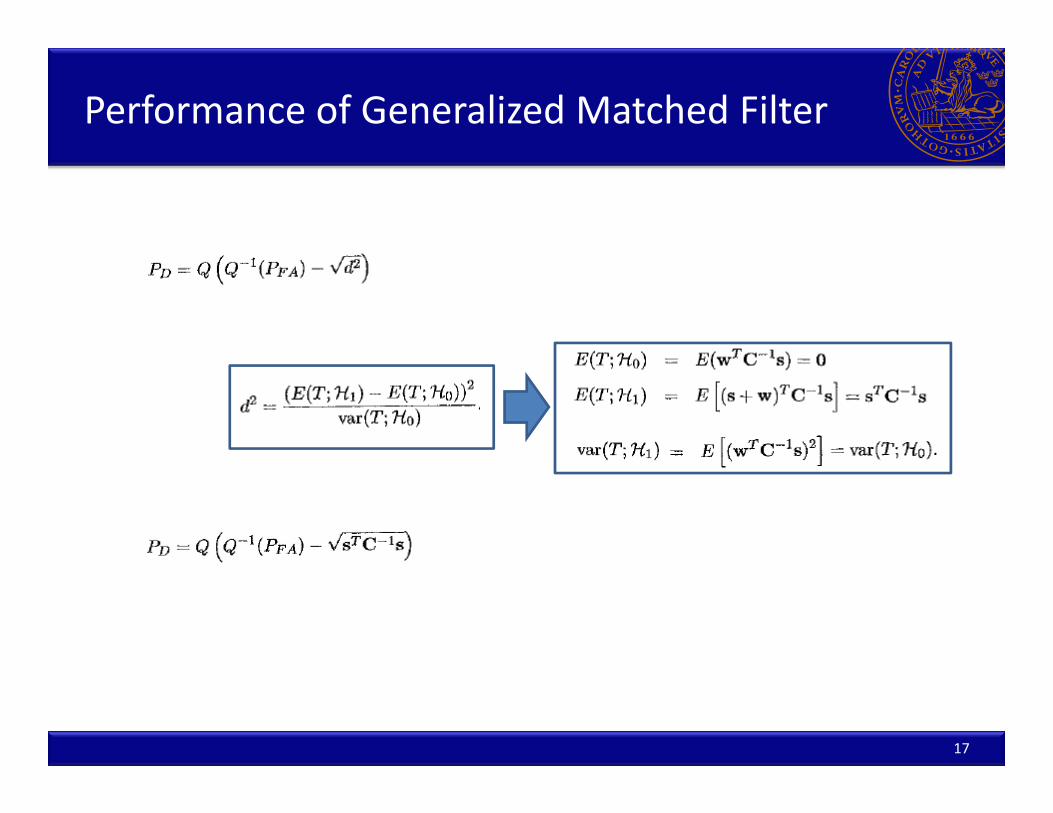
Performance of Generalized Matched Filter
17

Contents
• Neyman‐Pearson (NP) detector
• Matched Filter
• Detection Performance
• What if Gaussian noise is not white?
• Multiple Signals
• Linear Model
18
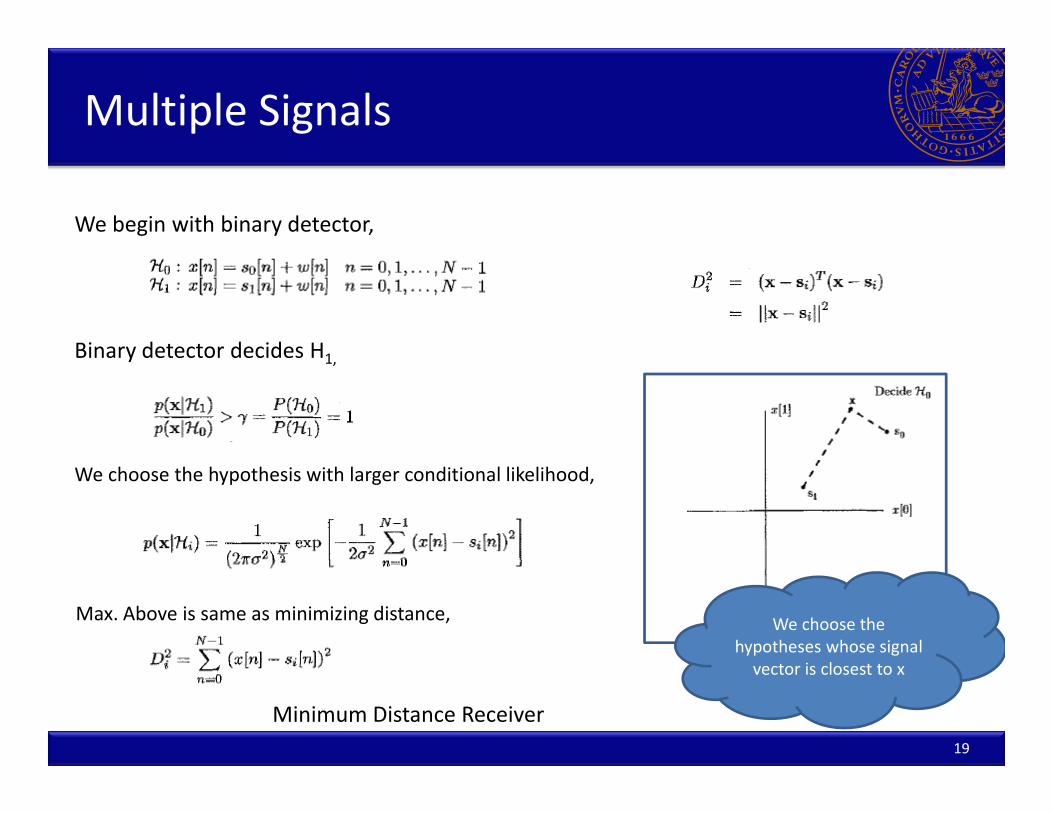
Multiple Signals
We begin with binary detector,
Binary detector decides H1Binary detector decides H1,
We choose the hypothesis with larger conditional likelihood,
We choose the hypotheses whose signal
i l
Max. Above is same as minimizing distance,
vector is closest to x
Minimum Distance Receiver19
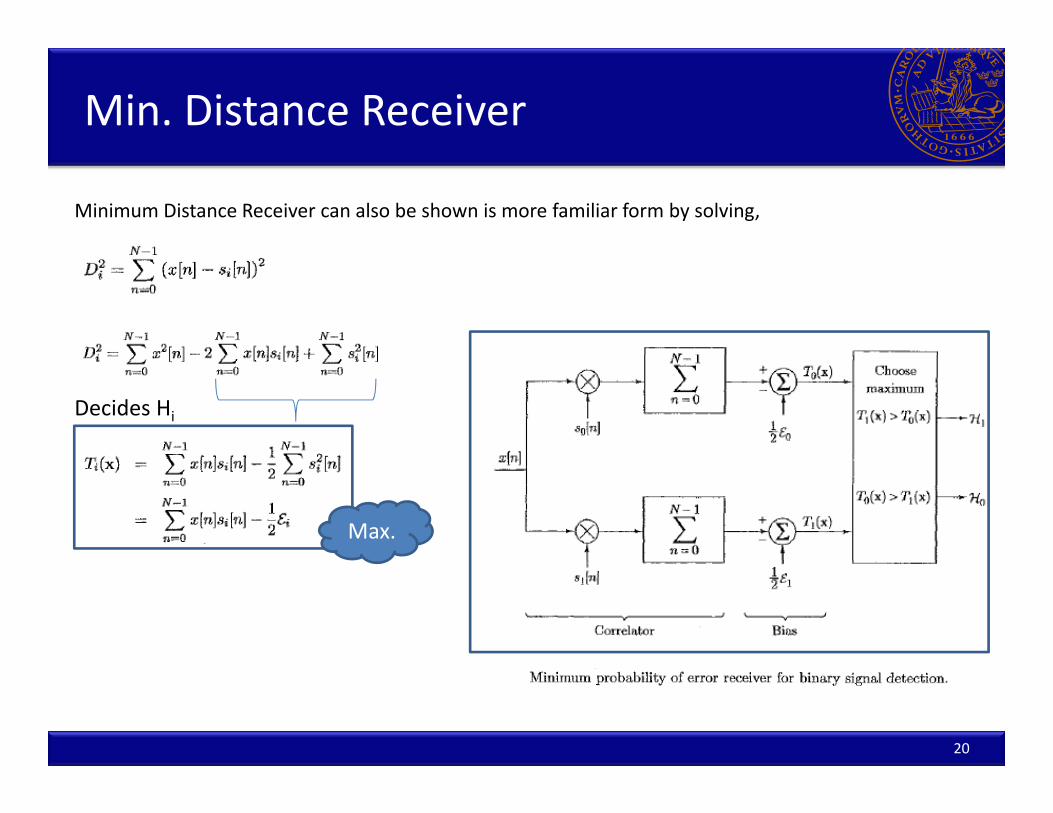
Min. Distance Receiver
Minimum Distance Receiver can also be shown is more familiar form by solving,
Decides Hi
Max.
20
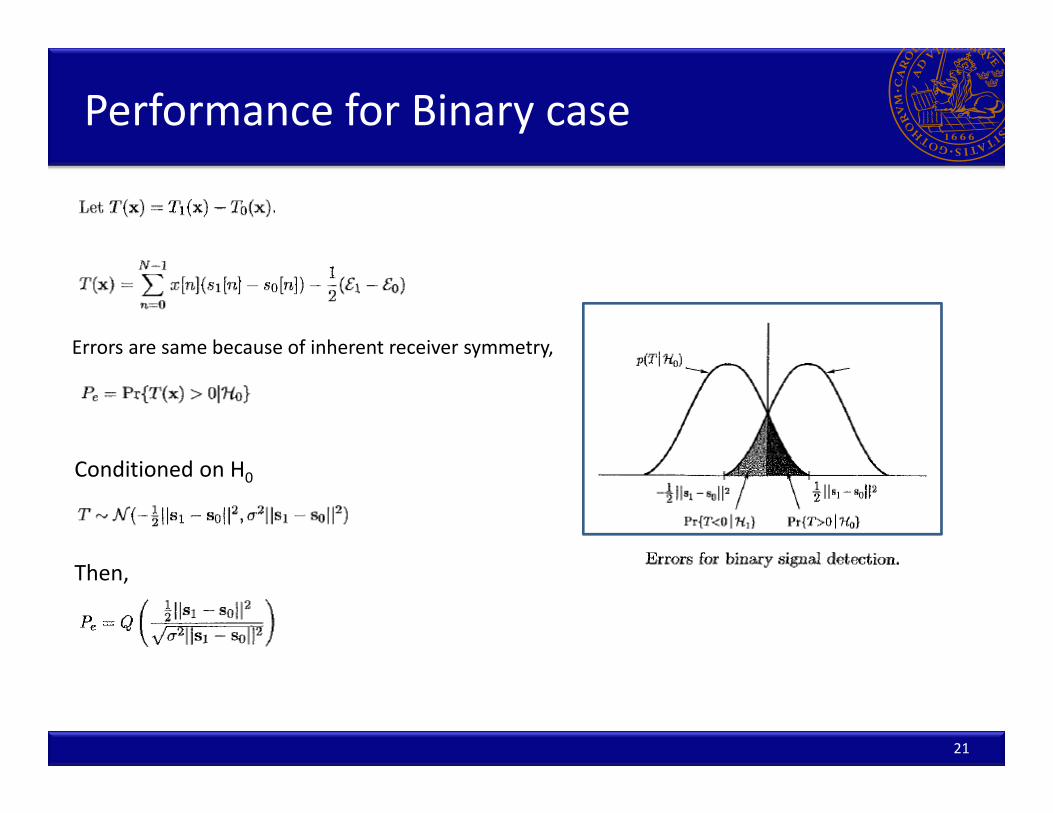
Performance for Binary case
Errors are same because of inherent receiver symmetry,y y,
Conditioned on H0
Then,
21
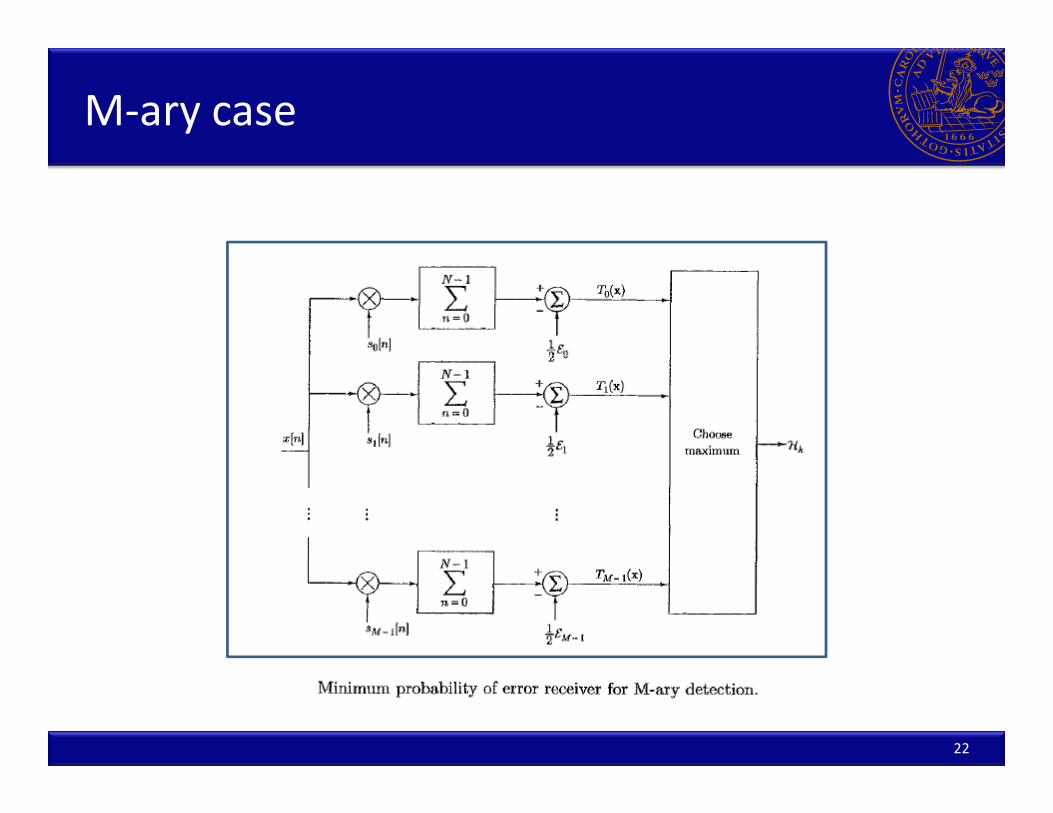
M‐ary case
22
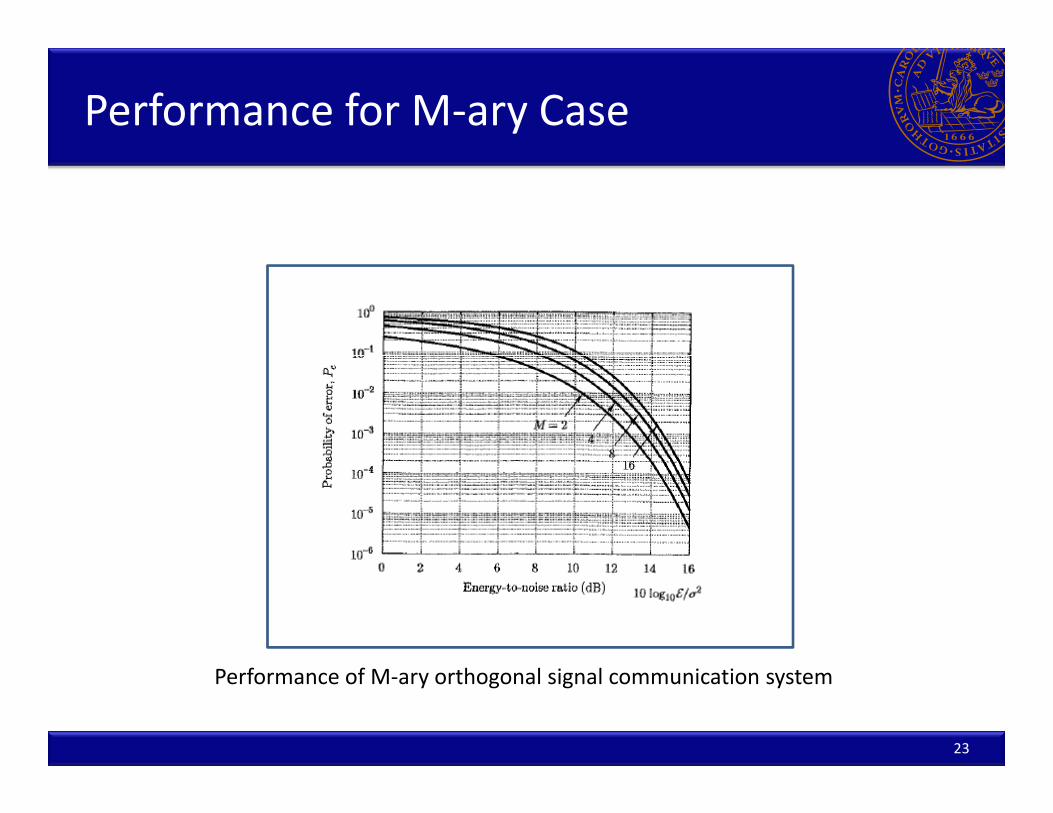
Performance for M‐ary Case
Performance of M‐ary orthogonal signal communication system
23
Contents
• Neyman‐Pearson (NP) detector
• Matched Filter
• Detection Performance
• What if Gaussian noise is not white?
• Multiple Signals
• Linear Model
24
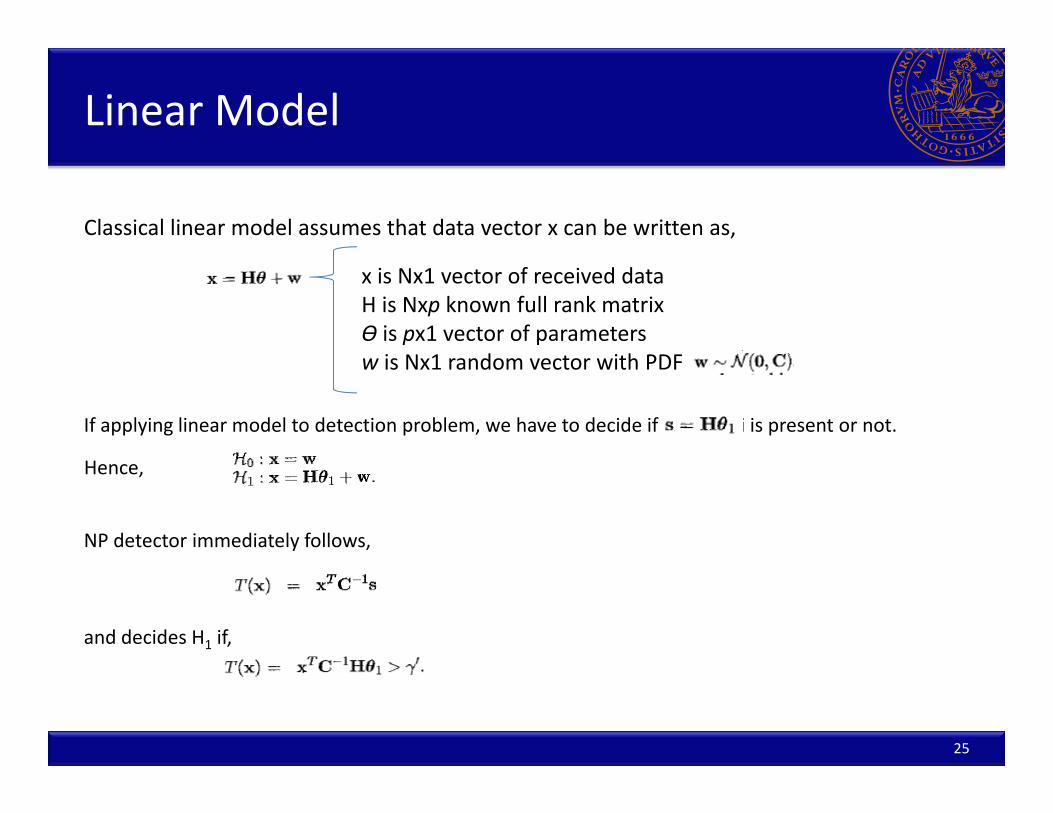
Linear Model
Classical linear model assumes that data vector x can be written as,
x is Nx1 vector of received dataH is Nxp known full rank matrixѲ is px1 vector of parametersi N 1 d i h PDFw is Nx1 random vector with PDF
If applying linear model to detection problem, we have to decide if i is present or not.
Hence,
NP detector immediately follows,
and decides H1 if,
25
Exericese Problems!
• P‐4.3
• P‐4.5P 4.5
• P‐4.12
• P‐4.21
• P‐4.26
26
![PROFESSIONAL SAFETY SOLUTIONS...Gas Detection : Portable Gas Detector Portable Gas Detector Professional Safety Solutions Toxic Gas Detection Tube [ 8] Chlorobenzene 5/a (5) 5-200](https://img.pdfslide.us/doc/110x75/5e9bad59442ca50a9d6aa088/professional-safety-solutions-gas-detection-portable-gas-detector-portable.jpg)