Embed Size (px)
Citation preview
Detecting Mars Surface Change Using Landmark Comparison
Julian Panetta Mentor: Kiri Wagstaff
8/20/2009
Monday, December 7, 2009
Overview
• Background
• Example data
• Approach
- Relative Landmark Graph (RLG) matching
• Visualization
• Results
Monday, December 7, 2009
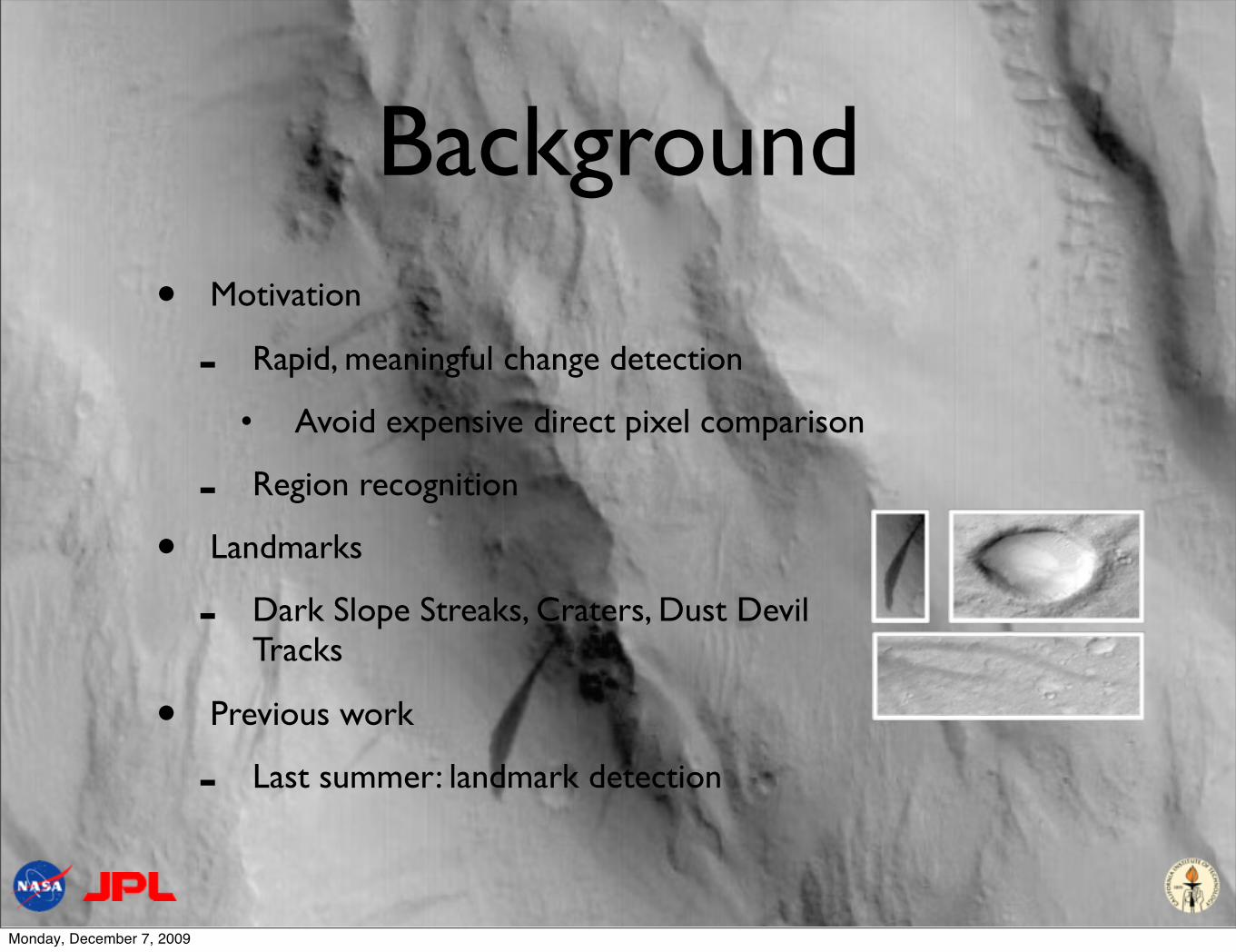
Background• Motivation
- Rapid, meaningful change detection
• Avoid expensive direct pixel comparison
- Region recognition
• Landmarks
- Dark Slope Streaks, Craters, Dust Devil Tracks
• Previous work
- Last summer: landmark detection
Monday, December 7, 2009

Example Data• Manually annotated image pairs
MOC E1500356, April 12, 2002MOC M1600596, June 12, 2000MOC M1600596, June 12, 2000
Monday, December 7, 2009
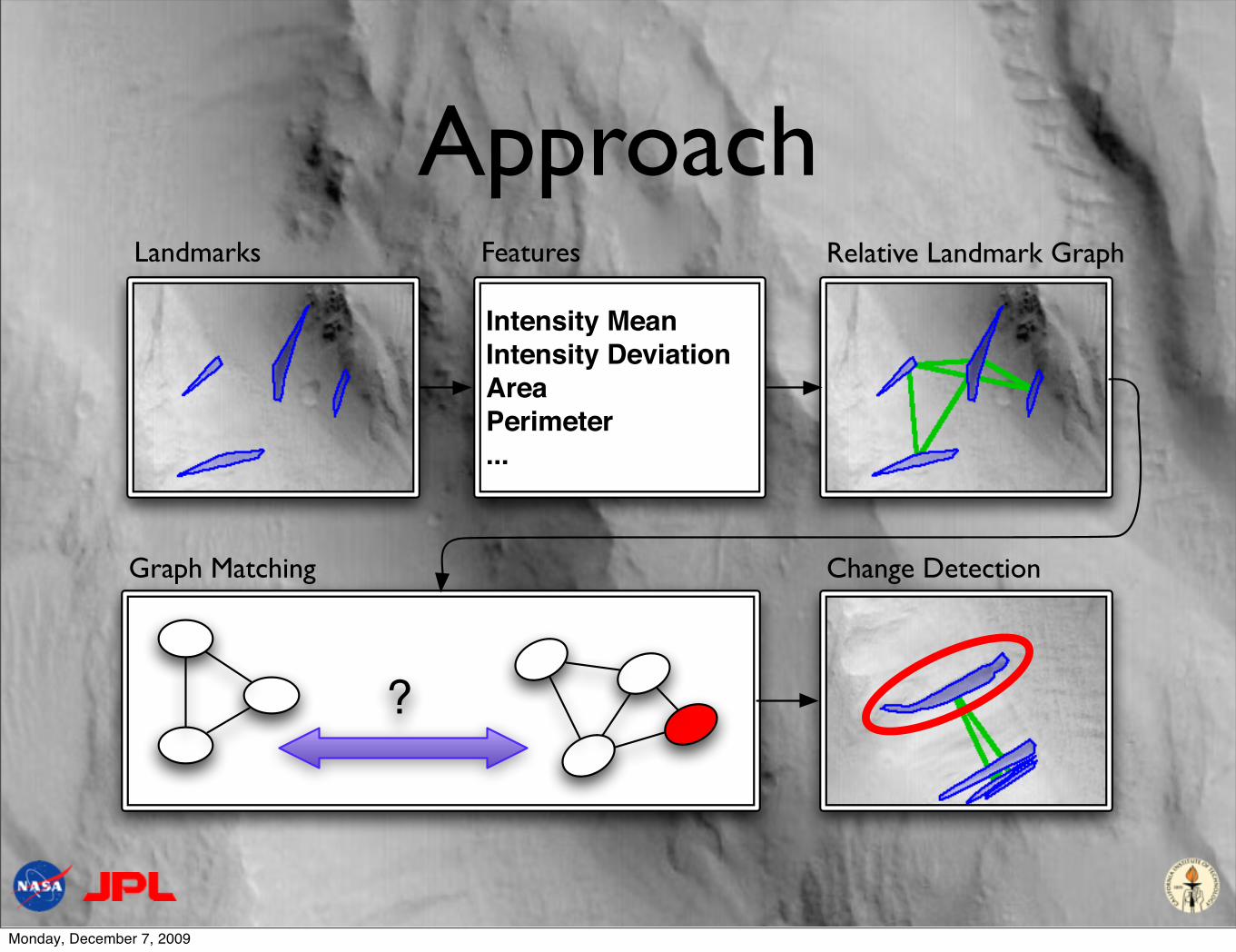
ApproachLandmarks Features
Intensity Mean
Intensity Deviation
Area
Perimeter
...
?
Relative Landmark Graph
Graph Matching Change Detection
Monday, December 7, 2009
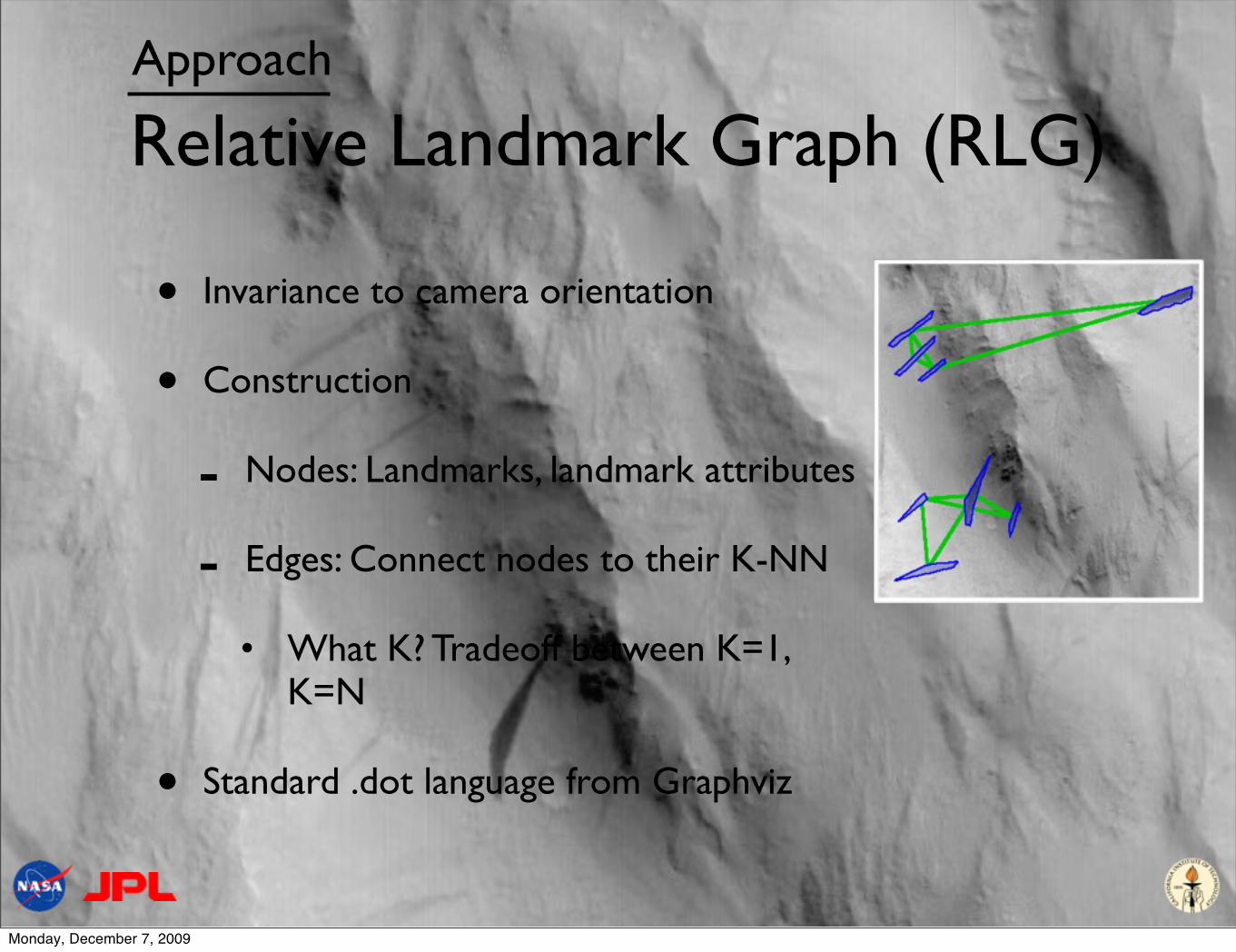
Approach
Relative Landmark Graph (RLG)
• Invariance to camera orientation
• Construction
- Nodes: Landmarks, landmark attributes
- Edges: Connect nodes to their K-NN
• What K? Tradeoff between K=1, K=N
• Standard .dot language from Graphviz
Monday, December 7, 2009
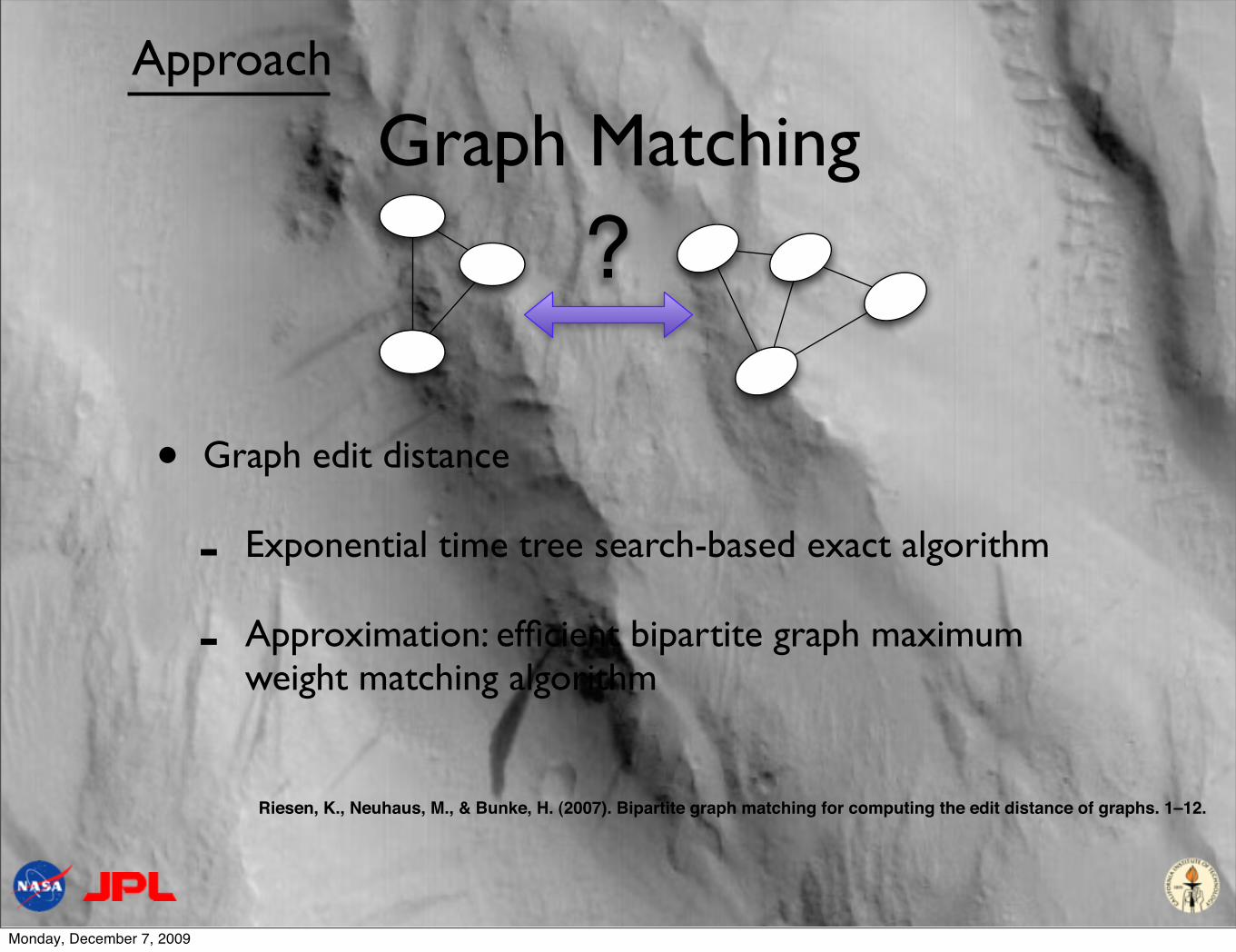
Approach
Graph Matching
• Graph edit distance
- Exponential time tree search-based exact algorithm
- Approximation: efficient bipartite graph maximum weight matching algorithm
?
Riesen, K., Neuhaus, M., & Bunke, H. (2007). Bipartite graph matching for computing the edit distance of graphs. 1–12.
Monday, December 7, 2009
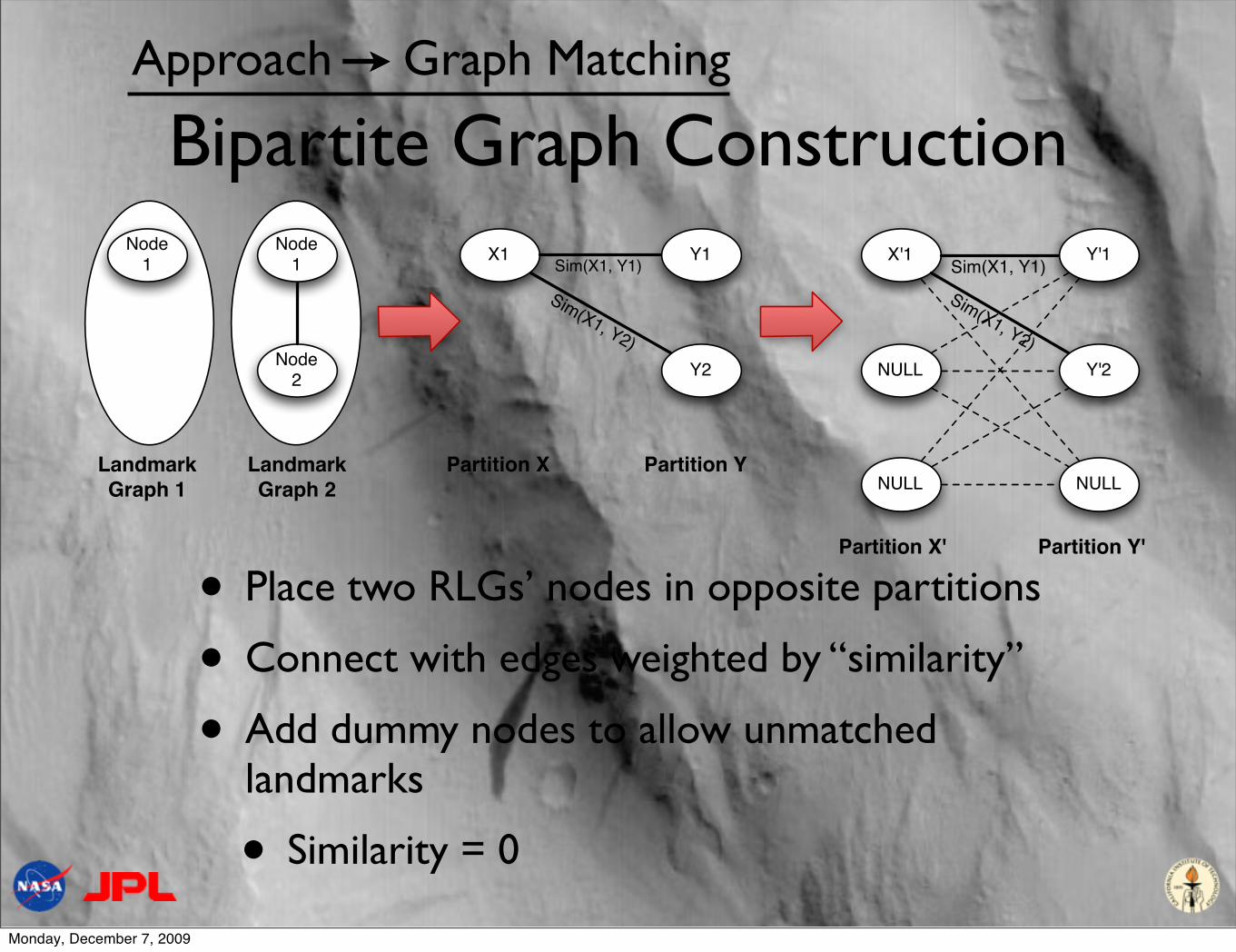
Approach Graph Matching
Bipartite Graph Construction
• Place two RLGs’ nodes in opposite partitions
• Connect with edges weighted by “similarity”
• Add dummy nodes to allow unmatched landmarks
• Similarity = 0
X1 Y1
Y2
Sim(X1, Y1)X'1 Y'1
Y'2
Sim(X1, Y1)
NULL
NULL NULL
Sim(X1, Y2)
Sim(X1, Y2)
Node 1
Node 1
Node2
Landmark
Graph 1
Landmark
Graph 2
Partition X Partition Y
Partition X' Partition Y'
Monday, December 7, 2009
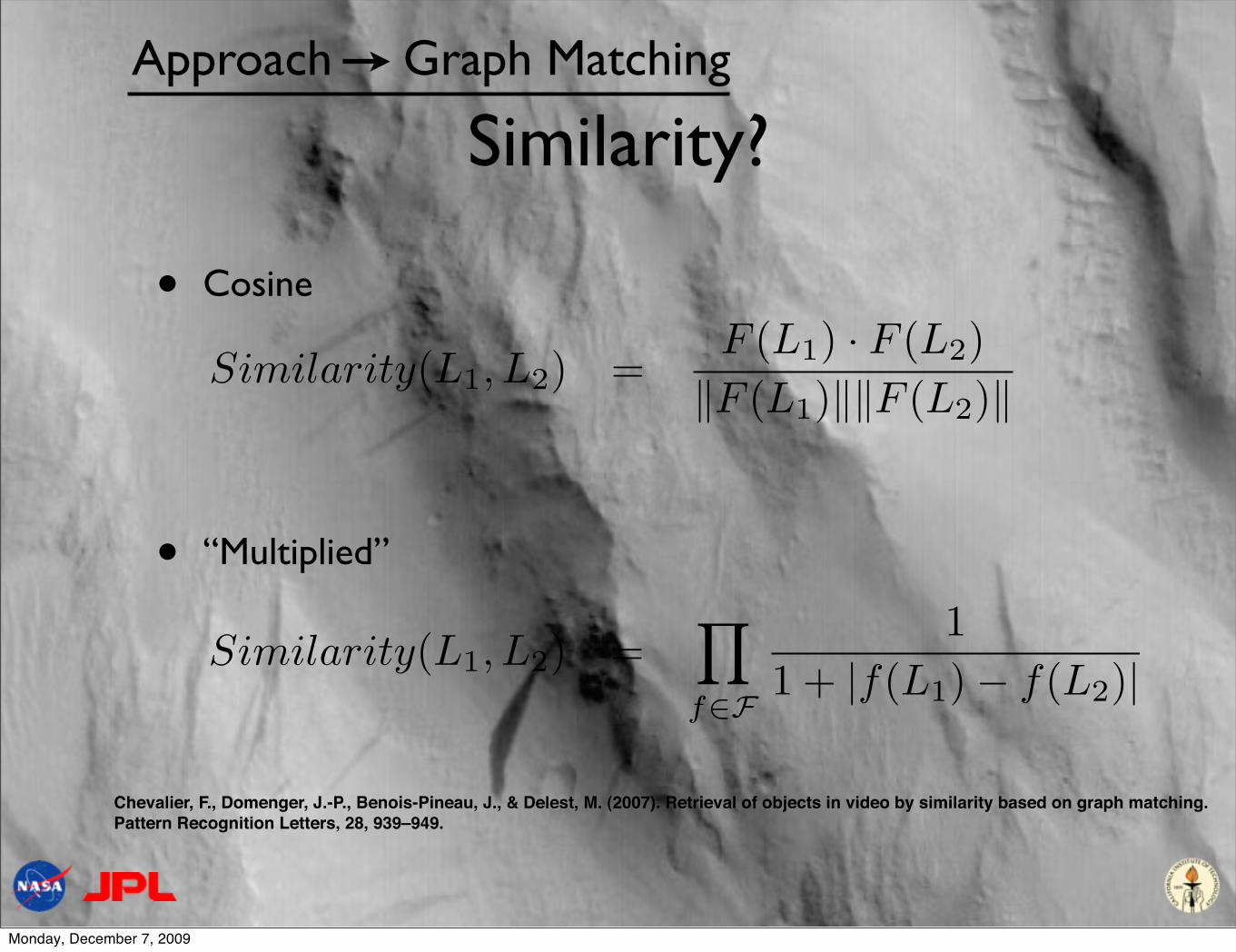
Approach Graph Matching
Similarity?
• Cosine
• “Multiplied”
Similarity(L1, L2) =�
f∈F
11 + |f(L1)− f(L2)|
Similarity(L1, L2) =F (L1) · F (L2)
�F (L1)��F (L2)�
Chevalier, F., Domenger, J.-P., Benois-Pineau, J., & Delest, M. (2007). Retrieval of objects in video by similarity based on graph matching. Pattern Recognition Letters, 28, 939–949.
Monday, December 7, 2009
Approach Graph Matching
Munkres’ Hungarian Algorithm
• Solves the “assignment problem”
• Computes maximum weight matching on a complete bipartite graph in O(n3)
• Solution effectively connects most similar landmarks
Kuhn, H. W. (1955). The Hungarian method for the assignment problem. Naval Research Logistic Quarterly, 2, 83–97.
Monday, December 7, 2009
Approach Graph Matching
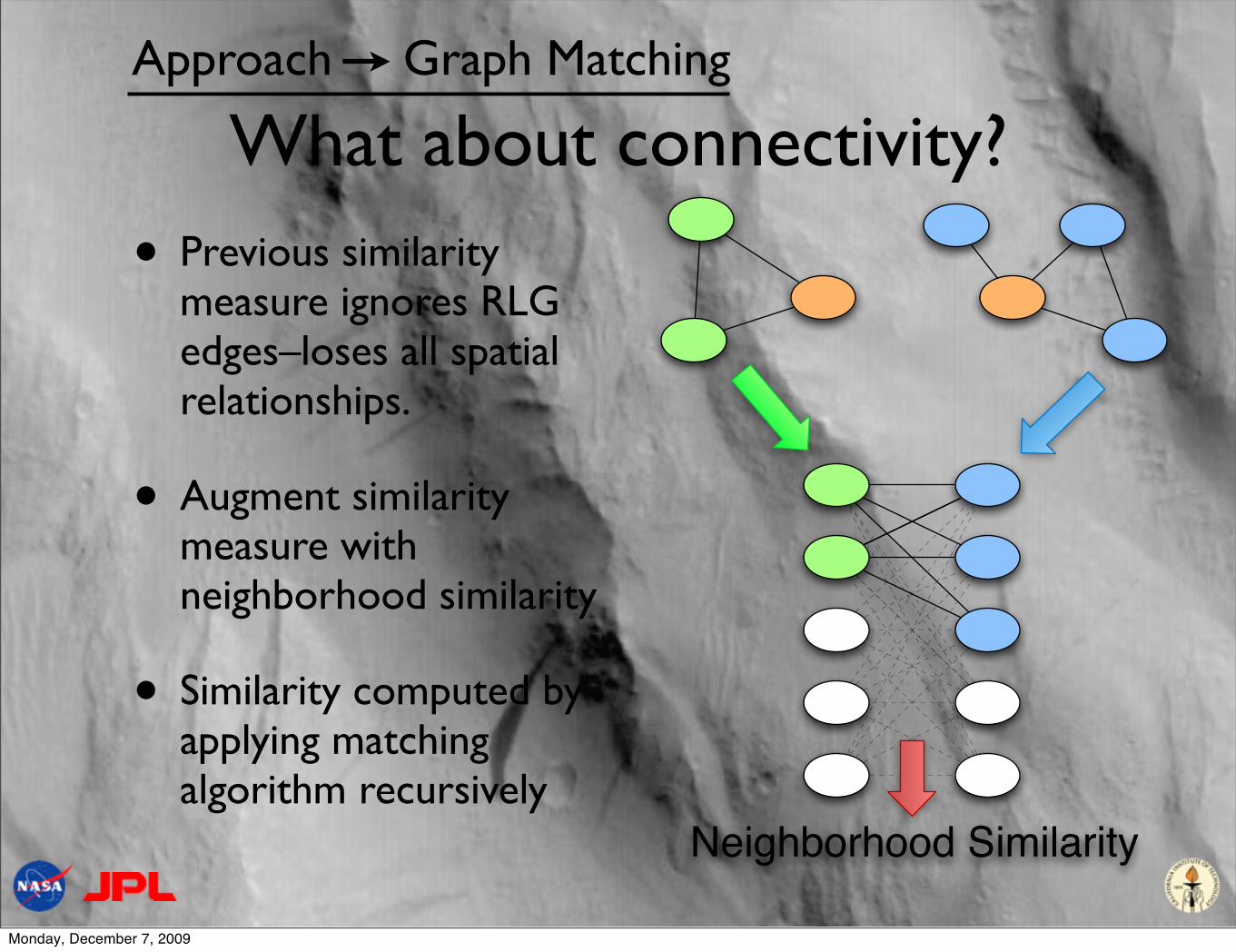
What about connectivity?
• Previous similarity measure ignores RLG edges–loses all spatial relationships.
• Augment similarity measure with neighborhood similarity
• Similarity computed by applying matching algorithm recursively
Neighborhood Similarity
Monday, December 7, 2009
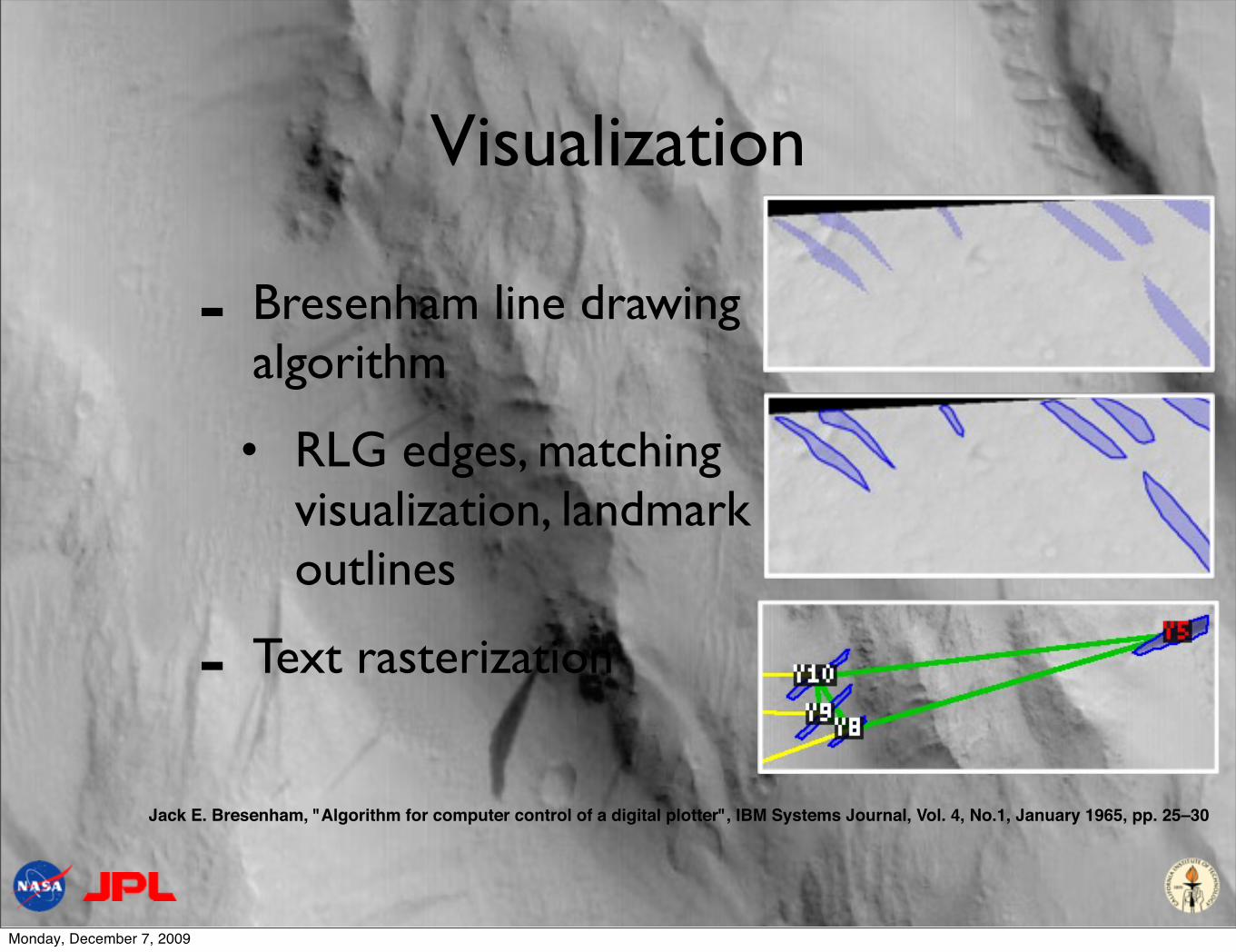
Visualization
- Bresenham line drawing algorithm
• RLG edges, matching visualization, landmark outlines
- Text rasterization
Jack E. Bresenham, "Algorithm for computer control of a digital plotter", IBM Systems Journal, Vol. 4, No.1, January 1965, pp. 25–30
Monday, December 7, 2009
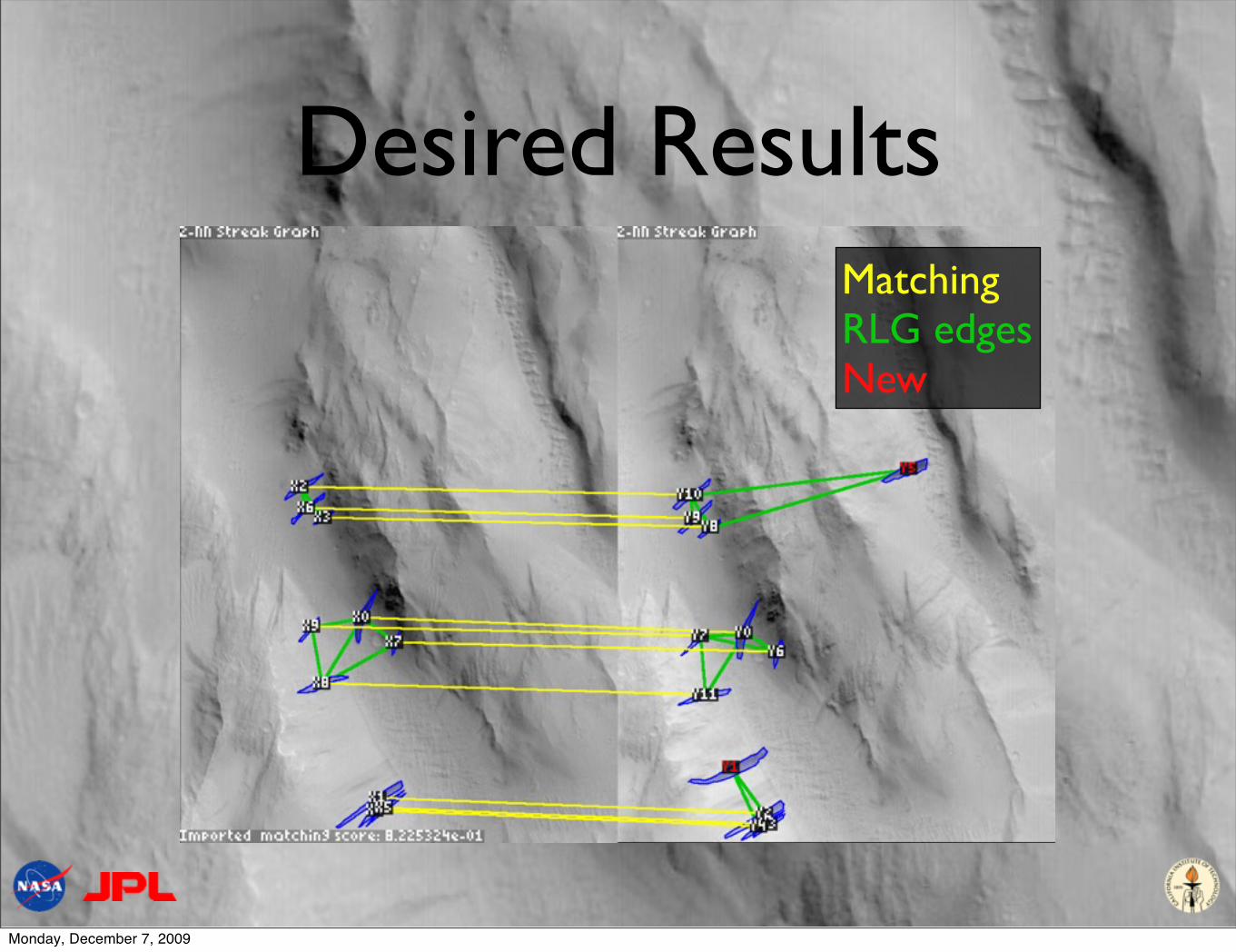
Desired ResultsMatchingRLG edgesNew
Monday, December 7, 2009
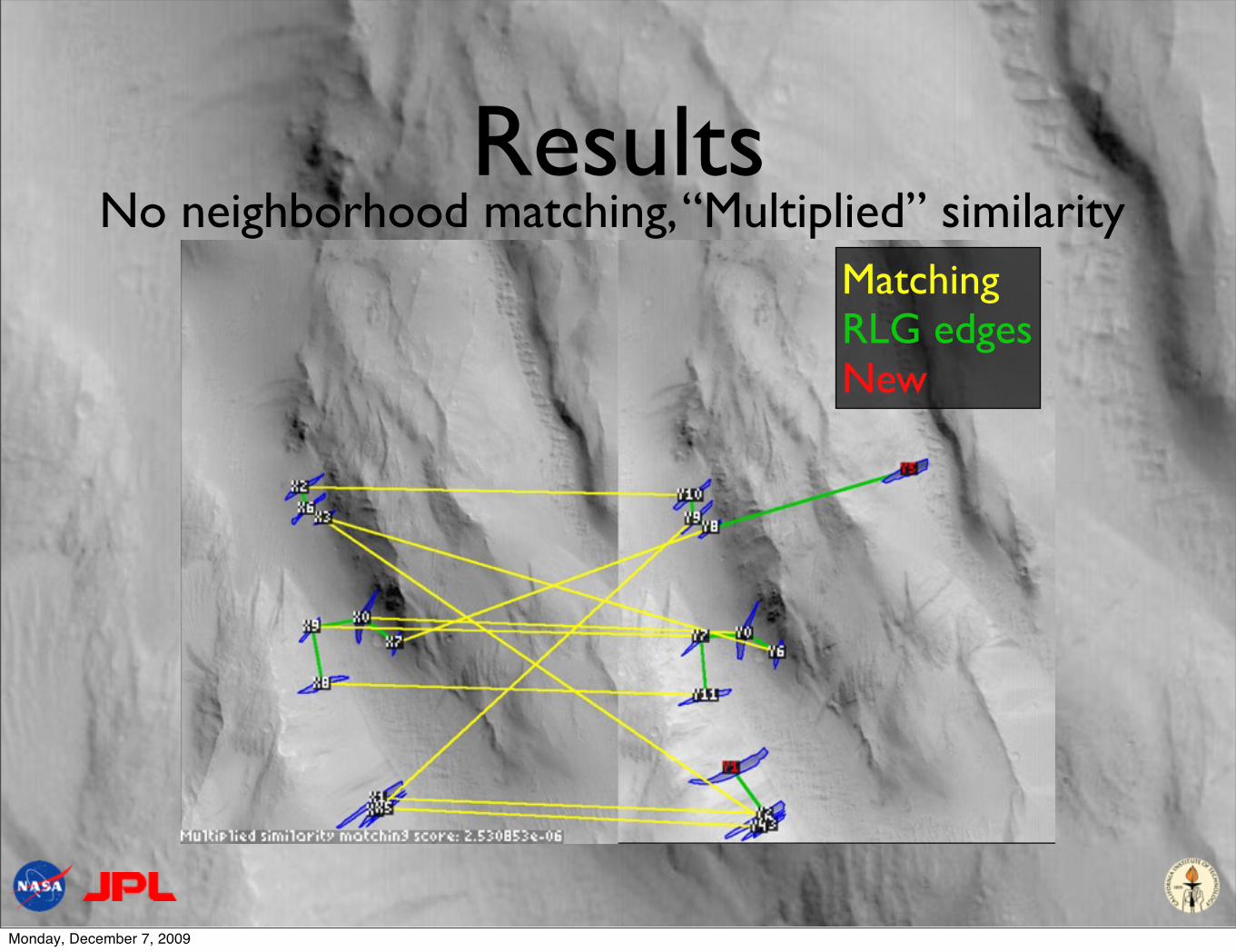
ResultsNo neighborhood matching, “Multiplied” similarity
MatchingRLG edgesNew
Monday, December 7, 2009

Results2-NN Neighborhood matching, “Multiplied” similarity
MatchingRLG edgesNew
Monday, December 7, 2009
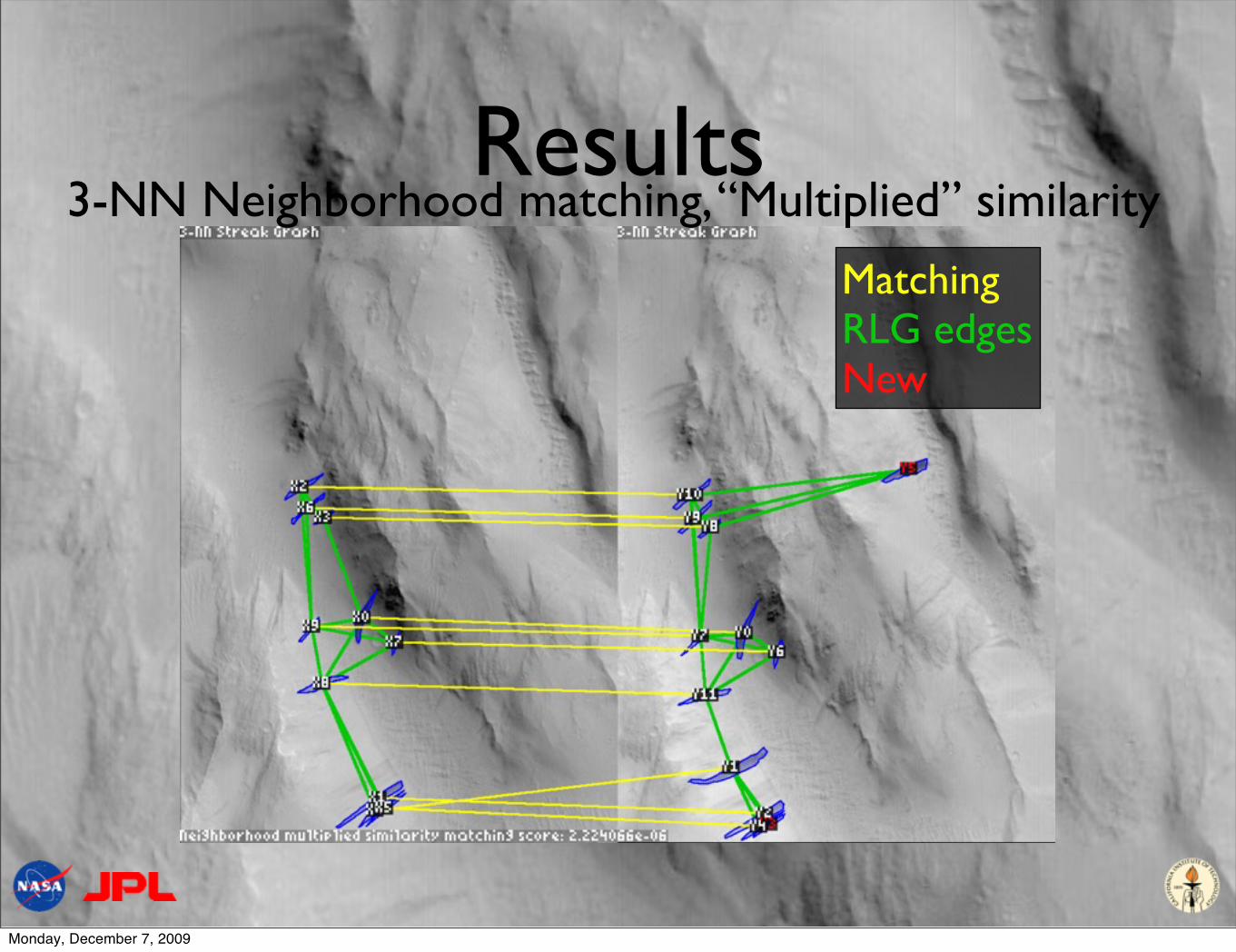
Results3-NN Neighborhood matching, “Multiplied” similarity
MatchingRLG edgesNew
Monday, December 7, 2009
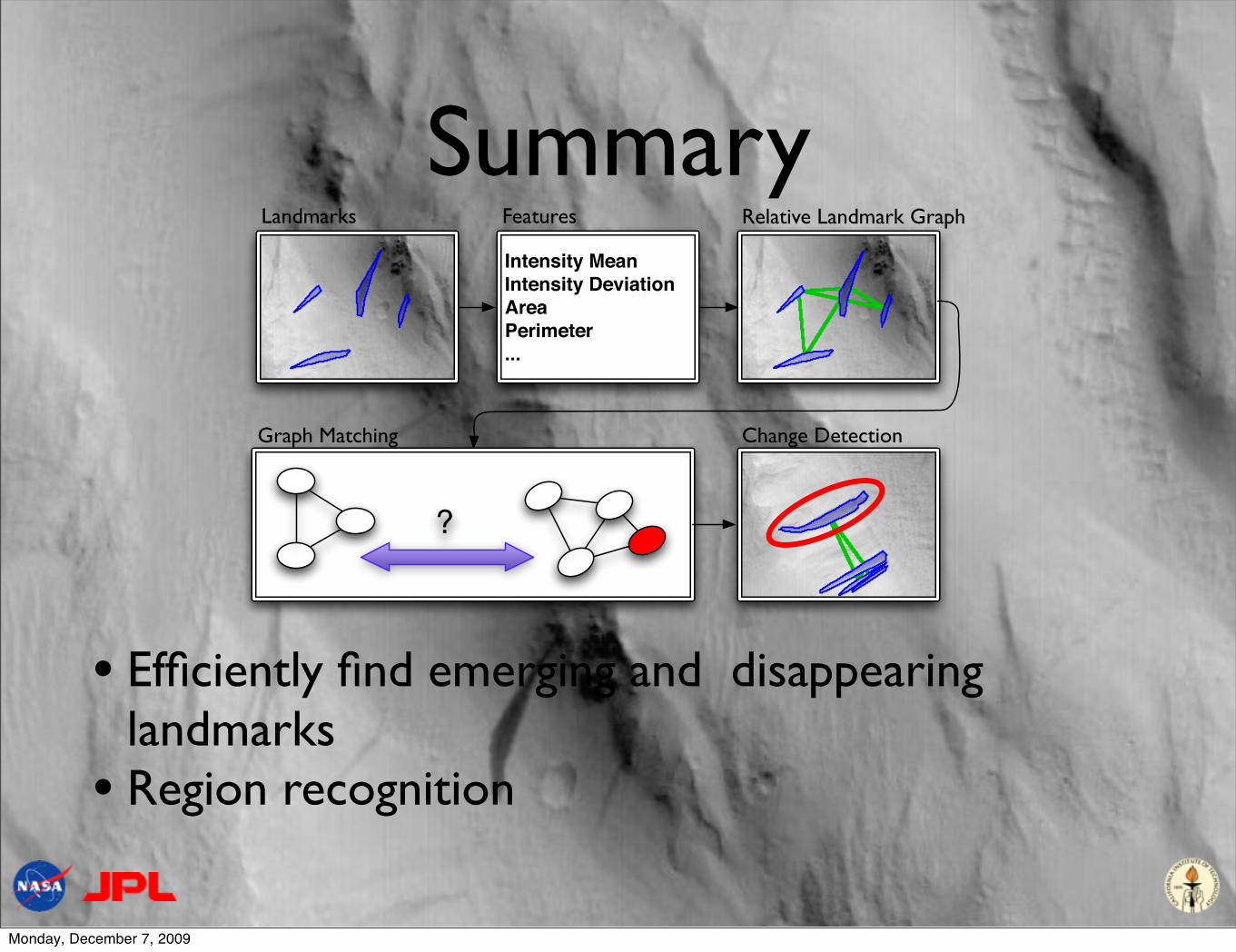
Summary
• Efficiently find emerging and disappearing landmarks
• Region recognition
Landmarks Features
Intensity Mean
Intensity Deviation
Area
Perimeter
...
?
Relative Landmark Graph
Graph Matching Change Detection
Monday, December 7, 2009
Future Work
• Experiment with different similarity measures
• Normalize feature vector components across both images
• Apply to automatically detected landmarks
Monday, December 7, 2009
Acknowledgements
• NASA AISR program
• Melissa Bunte, Ron Greeley, Mary Hoffer, Norbert Schörghofer
• Adnan Ansar, Ben Bornstein, David Thompson
• SURF mentor: Kiri Wagstaff
Monday, December 7, 2009





























