Embed Size (px)
Citation preview

ISSN: 2319-5967
ISO 9001:2008 Certified International Journal of Engineering Science and Innovative Technology (IJESIT)
Volume 3, Issue 6, November 2014
9
Design and Decoupling of Control System for
a Continuous Stirred Tank Reactor (CSTR) Georgeous, N.B
*1 and Gasmalseed, G.A, Abdalla, B.K
(1-2) University of Science and Technology, Sudan Department of Chemical Engineering.
Abstract: To apply the methods of stability analysis and tuning, it is necessary first to develop a control strategy for
possible noninteracting and interacting loops. Then the transfer functions were identified by mathematical modeling and
the overall gains were cited from the literature. Pairing of the loops were undertaken and the interact in loops were
coupled according to the RGA (Relative Gain Array), thus the loops with minimal interaction were selected and put in
block diagrams. The characteristic equations were obtained for both closed and open loops. An exothermic reaction in a
continuous stirred tank reactor (CSTR) was selected as a case study. The loops were subjected to tuning, stability and
offset investigation. Summary of the adjustable parameters, offsets and response behavior were tabulated for comparison
between the methods. It is clear that all the methods are in agreement, but the Bode criteria showed a superior
consistency over other methods. It is recommended that the method of Bode has to be preferentially selected for tuning
and stability analysis.
Index Terms: Methods of tuning, Stability, Transfer function identification, Offset investigation.
I. INTRODUCTION
A control system is composed of interacting loops and that the number of feasible alternative configurations
needed to be configured are very large. It must be recognized that for a process with n controlled variables and n
manipulated variables there are n different ways to form control the loops [1]
. The question is which one to
selected? The answer is to consider the interaction between the loops for all n loops and then the RGA is
applied to select a loop when the interaction is minimal. The RGA provides such a methodology by pairing the
input and output that give minimum interaction when together coupled, RGA was first proposed by Bristol and
today it is a very popular tool for selection of control loops giving minimal interaction [1].The methods of
pairings and the RGA were applied to an exothermic reaction in a jacketed CSTR, the process is a 2 2
controlled and manipulated variables. The method of stability and tuning were applied using Routh-Hurwitz,
direct substitution, root-Locus, and Bode and Nyquist criteria.
II. OBJECTIVES
1- To select the loops with minimal interaction in CSTR.
2- To study the dynamics of a CSTR.
3- To investigate the methods of tuning and stability analysis.
4- To compare the accuracy of these methods with respect to stability, adjustable parameters and offset.
III. LITERATURE REVIEW
Multiple input, multiple output (MIMO) systems describe processes with more than one input and more than
one output which require multiple control loops. Examples of MIMO systems include heat exchangers, chemical
reactors, and distillation columns. These systems can be complicated through loop interactions that result in
variables with unexpected effects. Decoupling the variables of that system will improve the control of that
process [2].
An example of a MIMO system is a jacketed CSTR in which the formation of the product is dependent upon the
reactor temperature and feed flow rate. The process is controlled by two loops, a composition control loop and a
temperature control loop. Changes to the feed rate are used to control the product composition and changes to
the reactor temperature are made by increasing or decreasing the temperature of the jacket. However, changes
made to the feed would change the reaction mass, and hence the temperature, and changes made to temperature
would change the reaction rate, and hence influence the composition. This is an example of loop interactions.
Loop interactions need to be avoided because changes in one loop might cause destabilizing changes in another
loop [2]. To avoid loop interactions, MIMO systems can be decoupled into separate loops known as single

ISSN: 2319-5967
ISO 9001:2008 Certified International Journal of Engineering Science and Innovative Technology (IJESIT)
Volume 3, Issue 6, November 2014
10
input, single output (SISO) systems. Decoupling may be done using several different techniques, including
restructuring the pairing of variables, minimizing interactions by detuning conflicting control loops, opening
loops and putting them in manual control, and using linear combinations of manipulated and/or controlled
variables. If the system can’t be decoupled, then other methods such as neural networks or model predictive
control should be used to characterize the system [2,3,4].
There are two ways to see if a system can be decoupled. One way is with mathematical models and the other
way is a more intuitive educated guessing method. Mathematical methods for simplifying MIMO control
schemes include the relative gain array (RGA)[2]
. The RGA provides a quantitative approach to the analysis of
the interactions between the controls and the output, and thus provides a method of pairing manipulated and
controlled variables to generate a control scheme. The RGA is a normalized form of the gain matrix that
describes the impact of each control variable on the output, relative to each control variable's impact on other
variables. The process interaction of open-loop and closed-loop control systems are measured for all possible
input-output variable pairings [5]. A ratio of this open-loop gain to this closed-loop gain is determined and the
results are displayed in a matrix. The array will be a matrix with one column for each input variable and one row
for each output variable in the MIMO system[5]
. The best pairing is discovered by taking the maximum value of
RGA Matrix for each row.
A digital computer can be used to control simultaneously several outputs, the control program is composed of
several subprograms, each one used to control a different loop. Furthermore, the control program should be able
to coordinate the execution of the various subprograms so that each loop and all together function properly [6].
Although a controller may be stable when implemented as an analog controller, it could be unstable when
implemented as a digital controller due to a large sampling interval. During sampling the aliasing modifies the
cutoff parameters. Thus the sample rate characterizes the transient response and stability of the compensated
system, and must update the values at the controller input often enough so as to not cause instability. When
substituting the frequency into the z operator, regular stability criteria still apply to discrete control systems.
Nyquist criteria apply to z-domain transfer functions as well as being general for complex valued functions.
Bode stability criteria apply similarly. Jury criterion determines the discrete system stability about its
characteristic polynomial [6].
The system stability can be tested by considering its response to a finite input signal. This means the analysis of
system dynamics in the actual time domain which is usually cumbersome and time consuming. Several methods
have been developed to deduce the system stability from its characteristic equation. They are short-cut methods
for providing information without finding out the actual response of the system. They give information from the
s-domain without going back to the actual time-domain. All these methods are based on the criterion that a
sufficient condition for stability of a control loop is to have a characteristic equation with only negative real
roots and or complex roots with negative real parts. The short-cut methods for assessment of the stability of a
system include the direct method, the Routh–Hurwitz stability criterion and graphical methods of investigating
the behavior of the roots of the characteristic equation, i.e. Root Locus method and Nyquist stability criterion.
Bode plots are common graphical method. It depends only upon the open loop transfer function (OLTF). The
OLTF relates the feedback or measured variable to the set point, when the feedback loop is disconnected from
the comparator when the loop is broken or opened.
IV. RESULTS AND DISCUSSION
Interaction, coupling and control of CSTR
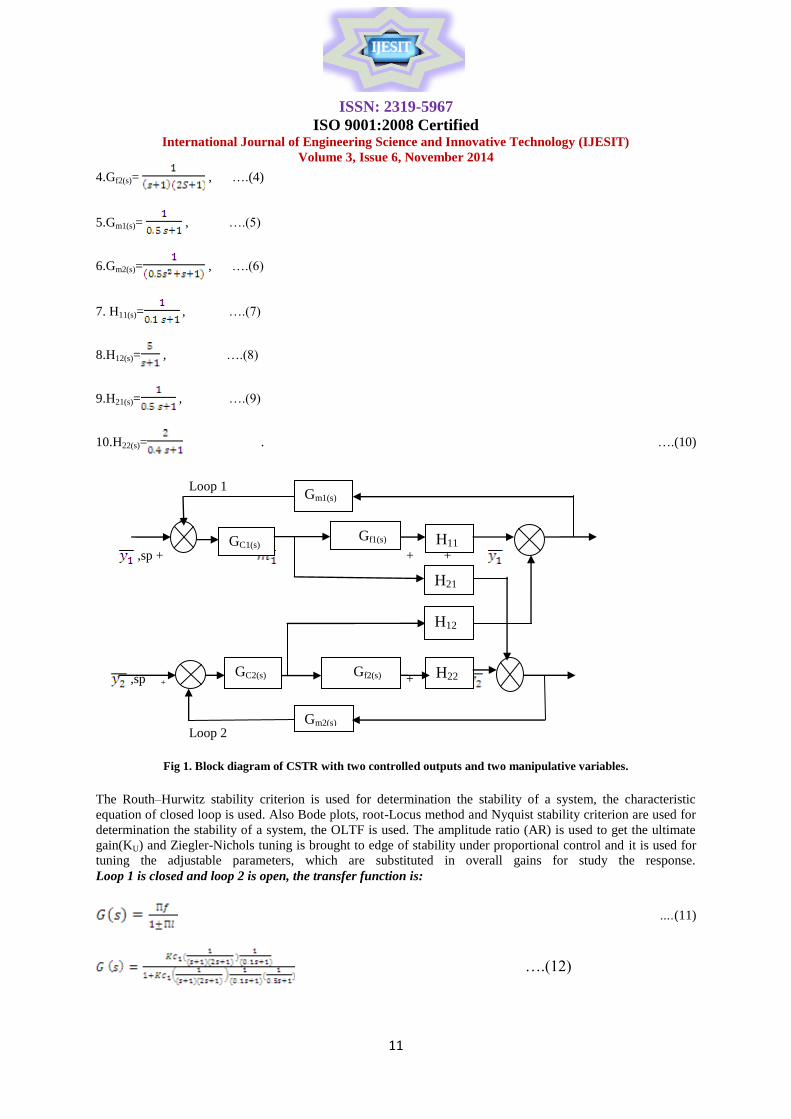
Consider a process with two controlled outputs and two manipulated inputs (Figure 1.). The transfer functions
are:
1.GC1(s)= KC1, ….(1)
2.GC2(s)= KC2, ….(2)
3.Gf1(s)= , ….(3)
ISSN: 2319-5967
ISO 9001:2008 Certified International Journal of Engineering Science and Innovative Technology (IJESIT)
Volume 3, Issue 6, November 2014
11
4.Gf2(s)= , ….(4)
5.Gm1(s)= , ….(5)
6.Gm2(s)= , ….(6)
7. H11(s)= , ….(7)
8.H12(s)= , ….(8)
9.H21(s)= , ….(9)
10.H22(s)= . ….(10)
Loop 1
-
,sp + + +
,sp + - + +
Loop 2
Fig 1. Block diagram of CSTR with two controlled outputs and two manipulative variables.
The Routh–Hurwitz stability criterion is used for determination the stability of a system, the characteristic
equation of closed loop is used. Also Bode plots, root-Locus method and Nyquist stability criterion are used for
determination the stability of a system, the OLTF is used. The amplitude ratio (AR) is used to get the ultimate
gain(KU) and Ziegler-Nichols tuning is brought to edge of stability under proportional control and it is used for
tuning the adjustable parameters, which are substituted in overall gains for study the response.
Loop 1 is closed and loop 2 is open, the transfer function is:
….(11)
….(12)
GC1(s)
H22
Gm2(s)
GC2(s) Gf2(s)
H21
H12
H11
Gm1(s)
Gf1(s)

ISSN: 2319-5967
ISO 9001:2008 Certified International Journal of Engineering Science and Innovative Technology (IJESIT)
Volume 3, Issue 6, November 2014
12
….(13)
The characteristic equation of closed loop is: 0.15 s4 +1.45s
3 + 3.85 s
2 +3.6 s + (1+ KC1) = 0 ….(14)
Putting the characteristic equation in Routh Array:
Table 1: Routh-Hurwitz Array
For the system to be critically stable: (3.183-0.417 KC1) = 0, KC1= KU1 = 7.633, The system become stable for all
values of KC1 KU1 7.633. The auxiliary equation is1.45s3
+3.6 s = 0, s= iω; ωco = 1.5757 rad / sec; Pu =
= = 3.99 sec.
Tuning:
Applying Ziegler- Nichols method ( Z-N method):
Table 2: Z-N adjustable parameters for loop 1
Controller mode KC1 τI ( sec) τD ( sec)
P 3.8165 - -
PI 3.4349 3.325 -
PID 4.5798 1.995 0.4988
Substituting the value of KC1 = 3.8165 of proportional controller (P- action) in characteristic equation,0.15 s4
+1.45s3
+ 3.85 s2 +3.6 s + 4.8165= 0 and in first column of Routh array. All elements of the first column were
positive and there is no change of sign, therefore the system is stable.
Response:
Substituting the value of KC1 in the transfer function of loop1 (G(s)) and introducing an impulse forcing function:
Impulse Response
Time (seconds)
Ampli
tude
0 5 10 15 20 25 30-0.5
0
0.5
1
System: sys
Peak amplitude: 0.849
At time (seconds): 1.12
System: sys
Settling time (seconds): 16.9
Fig 2. Impulse response when loop1 is closed.
S4 0.15 3.85 (1+ KC1) 0
S3 1.45 3.6 0 0
S2 3.4776 (1+ KC1) 0 0
S1 (3.183-0.417 KC1) 0 0 0
S0 (1+ KC1) 0 0 0

ISSN: 2319-5967
ISO 9001:2008 Certified International Journal of Engineering Science and Innovative Technology (IJESIT)
Volume 3, Issue 6, November 2014
13
Bode analysis and tuning:
Open loop transfer function (OLTF) of loop 1is:
….(15)
Fig 3. Bode diagram when loop1 is open
From Bode diagram, ωco =1.58 rad /sec and the amplitude ratio (AR)= 1, Pu = = 3.98 sec, the amplitude
ratio (AR) is used to get KC1.
1= ….(16)
Substituting the value of ωco = 1.58 rad / sec in the equation to get KC1,KC1= KU1= 7.9962
Response:
For Kc1 = 3.9981
Impulse Response
Time (seconds)
Ampl
itude
0 5 10 15 20 25 30-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
System: sys
Peak amplitude: 0.886
At time (seconds): 1.11
System: sys
Settling time (seconds): 18.9
Fig 4.Impulse response when loop1 is closed.
-250
-200
-150
-100
-50
0
Magn
itude
(dB)
Bode Diagram
Frequency (rad/s)
10-2
10-1
100
101
102
103
-360
-270
-180
-90
0
System: sys
Frequency (rad/s): 1.58
Phase (deg): -180
Phas
e (de
g)

ISSN: 2319-5967
ISO 9001:2008 Certified International Journal of Engineering Science and Innovative Technology (IJESIT)
Volume 3, Issue 6, November 2014
14
Root Locus:
Root Locus
Real Axis (seconds-1)
Imag
inary
Axis
(sec
onds
-1)
-20 -15 -10 -5 0 5 10 15-15
-10
-5
0
5
10
15
System: sys
Gain: 7.52
Pole: -0.00429 + 1.57i
Damping: 0.00273
Overshoot (%): 99.1
Frequency (rad/s): 1.57
Fig 5.Root-Locus diagram when loop1 is open
From root-Locus diagram, ωco = 1.57 rad / sec and the amplitude ratio (AR) = 1, KC1= KU1= 7.8939
Response:
For Kc1 = 3.9469
Impulse Response
Time (seconds)
Ampli
tude
0 5 10 15 20 25 30-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
System: sys
Peak amplitude: 0.875
At time (seconds): 1.11
System: sys
Settling time (seconds): 18.8
Fig 6. Impulse response when loop1 is closed.
Nyquist stability criterion:
Nyquist Diagram
Real Axis
Imag
inary
Axis
-1 -0.5 0 0.5 1 1.5-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
System: sys
Real: -0.132
Imag: 0.00326
Frequency (rad/s): -1.58
Fig 7. Nyquist diagram when loop1 is open
From Nyquist diagram, ωco = 1.58 rad / sec.The characteristic equation of closed loop is:
0.15 s4 +1.45s
3 + 3.85 s
2 +3.6 s + (1+ KC1) = 0 ….(14)
0.15 ω 4 -1.45 iω
3 - 3.85 ω
2 +3.6 iω + (1+ KC1) = 0 ….(17)

ISSN: 2319-5967
ISO 9001:2008 Certified International Journal of Engineering Science and Innovative Technology (IJESIT)
Volume 3, Issue 6, November 2014
15
0.15 ω 4 - 3.85 ω
2 + (1+ KC1) = 0 ….(18)
Substituting the value of ωco = 1.58 rad / sec to get KC1, KC1= KU1 = 7.6763
Response: For Kc1 = 3.8382
Impulse Response
Time (seconds)
Am
plitu
de
0 5 10 15 20 25 30-0.5
0
0.5
1
System: sys
Peak amplitude: 0.854
At time (seconds): 1.12
System: sys
Settling time (seconds): 16.9
Fig 8. Impulse response when loop1 is closed
Table 3: Comparison between the methods for continuous stirred tank reactor ( CSTR ) of loop1
Method KU PU
(sec)
KC
Routh-
Durwitz
7.633 3.99 3.8165 -0.2076
Bode 7.9962 3.98 3.9981 -0.2001
Root-Locus 7.8939 4.00 3.9469 -0.2021
Nyquist 7.6763 3.98 3.8382 -0.2067
Table 4: Comparison between the methods for continuous stirred tank reactor ( CSTR ) of loop1
Method Overshoot Rise
time(sec)
Settling
time(sec)
Routh-Durwitz 0.849 1.12 16.9
Bode 0.886 1.11 18.9
Root-Locus 0.875 1.11 18.8
Nyquist 0.854 1.12 16.9
Loop 2 is closed and loop 1 is open, the transfer function is:
….(19)
The characteristic equation is: 0.4 S5 + 2.4 s
4 +5.7s
3 + 7.1 s
2 +4.4 s + (1+ 2KC2) = 0 ….(20)
The preceding procedure is applied.
Table 5: Routh-Hurwitz Array
S5 0.4 5.7 4.4 0
S4 2.4 7.1 (1+ 2KC2) 0
S3 4.5167 (4.23-0.33KC2) 0 0
S2 (4.85+0.18 KC2) (1+ 2KC2) 0 0

ISSN: 2319-5967
ISO 9001:2008 Certified International Journal of Engineering Science and Innovative Technology (IJESIT)
Volume 3, Issue 6, November 2014
16
S1
( ) 0 0 0
S0 (1+2 KC2) 0 0 0
KU2 = 1.6029, ωco= 0.906 rad / sec, Pu = = 6.94 sec, KC2 = 0.8015.
Response: For Kc2 = 0.8015
Impulse Response
Time (seconds)
Ampli
tude
0 5 10 15 20 25 30 35-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
System: sys
Peak amplitude: 0.37
At time (seconds): 1.75
System: sys
Settling time (seconds): 22.9
Fig 9. Impulse response when loop2 is closed
Bode analysis and tuning:
Open loop transfer function (OLTF) of loop 2is:
….(21)
-200
-150
-100
-50
0
50
Mag
nitu
de (
dB)
Bode Diagram
Frequency (rad/s)
10-2
10-1
100
101
102
-450
-360
-270
-180
-90
0System: sys
Frequency (rad/s): 0.906
Phase (deg): -180
Pha
se (
deg)
Fig 10. Bode diagram when loop2 is open

ISSN: 2319-5967
ISO 9001:2008 Certified International Journal of Engineering Science and Innovative Technology (IJESIT)
Volume 3, Issue 6, November 2014
17
From Bode diagram, ωco = 0.906 rad / sec, Pu = = 6.9379 sec, and the amplitude ratio (AR) = 1=
….(22)
KC2= KU2= 1.6054.
Response : For Kc2 = 0.8027
Impulse Response
Time (seconds)
Ampl
itude
0 5 10 15 20 25 30 35-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
System: sys
Settling time (seconds): 23
System: sys
Peak amplitude: 0.371
At time (seconds): 1.75
Fig 11. Impulse response when loop2 is closed
Root Locus:
Root Locus
Real Axis (seconds-1)
Imag
inary
Axis
(sec
onds
-1)
-8 -6 -4 -2 0 2 4-6
-4
-2
0
2
4
6
System: sys
Gain: 1.64
Pole: 0.00626 + 0.909i
Damping: -0.00689
Overshoot (%): 102
Frequency (rad/s): 0.909
Fig 12. Root-Locus diagram when loop2 is open
From root-Locus diagram, ωco = 0.909 rad / sec and the amplitude ratio (AR) = 1, KC2= KU2= 1.6141.
Response: For Kc2 = 0.8071
Impulse Response
Time (seconds)
Am
plitu
de
0 5 10 15 20 25 30 35-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
System: sys
Settling time (seconds): 23
System: sys
Peak amplitude: 0.373
At time (seconds): 1.75
Fig 13. Impulse response when loop2 is closed
ISSN: 2319-5967
ISO 9001:2008 Certified International Journal of Engineering Science and Innovative Technology (IJESIT)
Volume 3, Issue 6, November 2014
18
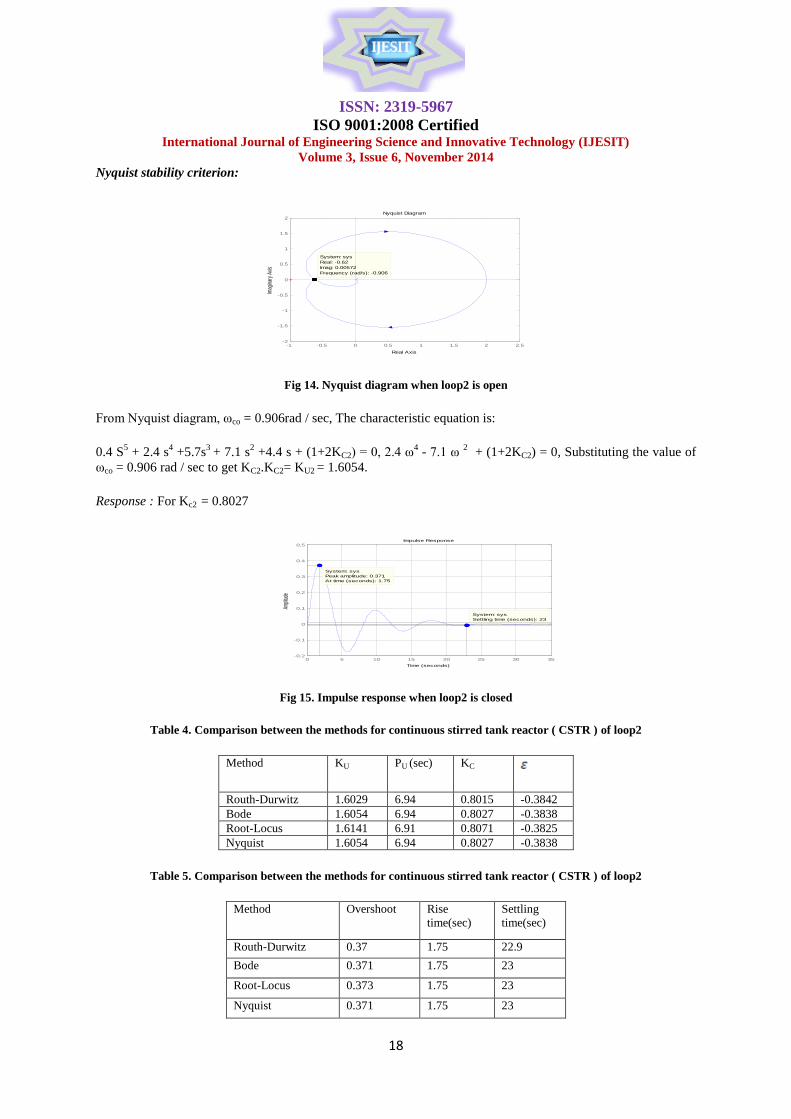
Nyquist stability criterion:
-1 -0.5 0 0.5 1 1.5 2 2.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
System: sys
Real: -0.62
Imag: 0.00572
Frequency (rad/s): -0.906
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
Fig 14. Nyquist diagram when loop2 is open
From Nyquist diagram, ωco = 0.906rad / sec, The characteristic equation is:
0.4 S5 + 2.4 s
4 +5.7s
3 + 7.1 s
2 +4.4 s + (1+2KC2) = 0, 2.4 ω
4 - 7.1 ω
2 + (1+2KC2) = 0, Substituting the value of
ωco = 0.906 rad / sec to get KC2.KC2= KU2 = 1.6054.
Response : For Kc2 = 0.8027
Impulse Response
Time (seconds)
Ampli
tude
0 5 10 15 20 25 30 35-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
System: sys
Settling time (seconds): 23
System: sys
Peak amplitude: 0.371
At time (seconds): 1.75
Fig 15. Impulse response when loop2 is closed
Table 4. Comparison between the methods for continuous stirred tank reactor ( CSTR ) of loop2
Method KU PU (sec) KC
Routh-Durwitz 1.6029 6.94 0.8015 -0.3842
Bode 1.6054 6.94 0.8027 -0.3838
Root-Locus 1.6141 6.91 0.8071 -0.3825
Nyquist 1.6054 6.94 0.8027 -0.3838
Table 5. Comparison between the methods for continuous stirred tank reactor ( CSTR ) of loop2
Method Overshoot Rise
time(sec)
Settling
time(sec)
Routh-Durwitz 0.37 1.75 22.9
Bode 0.371 1.75 23
Root-Locus 0.373 1.75 23
Nyquist 0.371 1.75 23
ISSN: 2319-5967
ISO 9001:2008 Certified International Journal of Engineering Science and Innovative Technology (IJESIT)
Volume 3, Issue 6, November 2014
19
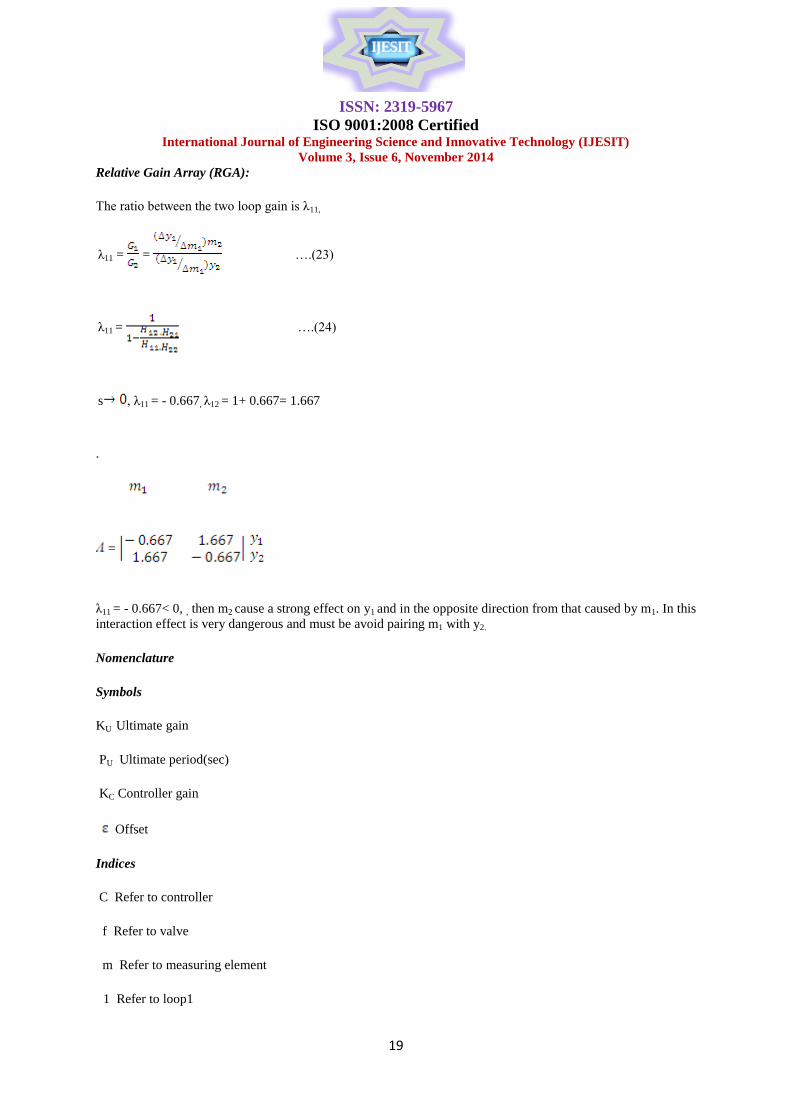
Relative Gain Array (RGA):
The ratio between the two loop gain is λ11,
λ11 = = ….(23)
λ11 = ….(24)
s , λ11 = - 0.667, λ12 = 1+ 0.667= 1.667
.
=
λ11 = - 0.667< 0, , then m2 cause a strong effect on y1 and in the opposite direction from that caused by m1. In this
interaction effect is very dangerous and must be avoid pairing m1 with y2.
Nomenclature
Symbols
KU Ultimate gain
PU Ultimate period(sec)
KC Controller gain
Offset
Indices
C Refer to controller
f Refer to valve
m Refer to measuring element
1 Refer to loop1

ISSN: 2319-5967
ISO 9001:2008 Certified International Journal of Engineering Science and Innovative Technology (IJESIT)
Volume 3, Issue 6, November 2014
20
2 Refer to loop2
V. CONCLUSION
It is clear that all the methods are in agreement, but the Bode criterion has to be preferentially selected for tuning
and stability analysis. For CSTR, λ11 = - 0.667, then m2 cause a strong effect on y1 and in the opposite direction
from that caused by m1. In this interaction effect is very dangerous.
ACKNOWLEDGMENT
The authors wish to thank the Collage of Higher Studies and Research of Karary University for their help and
for giving us opportunity for carrying out research in partial fulfillment for Ph.D in Chemical Engineering.
REFERENCES [1] Stephanopoulos, G. (2005), Chemical Process Control, Prentice-Hall, India.
[2] Tham, M.T. (1999). "Multivariable Control: An Introduction to Decoupling Control". Department of Chemical and
Process Engineering, University of Newcastle upon Tyne.
[3] McMillan, Gregory K. (1983) Tuning and Control Loop Performance. Instrument Society of America. ISBN 0-87664-
694-1.
[4] Lee, Jay H., Choi, Jin Hoon, and Lee, Kwang Soon. (1997). "3.2 Interaction and I/O Pairing". Chemical Engineering
Research Information Center.
[5] Berber, Ridvan. (1994).Methods of Model Based Process Control, Kluwer Academic Publishers.
[6] FRANKLIN, G.F.; POWELL, J.D. (1981). Digital control of dynamical systems. USA, California: Addison-Wesley.
ISBN 0-201-82054-4.