Embed Size (px)
Citation preview

Applied Mathematics and Computation 188 (2007) 555–566
www.elsevier.com/locate/amc
Descent direction algorithm with multicommodity flowproblem for signal optimization and traffic assignment jointly
Mehdi Ghatee *, S. Mehdi Hashemi
Faculty of Mathematics and Computer Sciences, Amirkabir University of Technology, No. 424, Hafez Ave., Tehran 15875-4413, Iran
Dedicated to Professor Giulio Erberto Cantarella
Abstract
Network managers wish to optimize control parameters such as signal setting which are very related to the trafficassignment models. On the other hand traffic assignment patterns as an important instrument for predicting the amountof flow on network links are dependent to control decisions. According to the significance of this concept, some importantpapers about this mutually relation are reviewed in this paper. Then we implement a nonlinear algorithm on a minimal costmulticommodity flow (MCMF) problem to optimize some control policies subject to optimal flows. Although we take sig-nal times into account, but this approach has a far more reaching application in urban network control and design. Weemploy a hybrid intelligent algorithm integrating decent direction algorithm and an interior point algorithm in a mutuallyconsistent scheme for obtaining optimal signals and equilibrium flows. An example is given to illustrate the effectiveness ofour scheme.� 2006 Elsevier Inc. All rights reserved.
Keywords: Signal setting; Traffic assignment; Multicommodity flows
1. Introduction
Associate with the advances in travelling information systems, users of this systems are interested to chooseshortest paths for their trips. Thus it is expected that optimization aspects become important over and overand be followed in real problems. On the other hand, due to the system managers’ policies, each controlparameter such as signal times, has an important influence on the definition of shortest path. The target ofsignal setting is to increase the level of service in the transportation system. Thank to this point of view, somecustomize softwares are produced for signal optimization, such as SIGNAL, SCOOT and TRANSYT.But with respect to their independency by traffic flows, maybe these are not complete. So, some of theresearchers try to introduce these aspects jointly. This standpoint has been presented by Pavese [56] in1968. Then in 1980, some contradiction examples were given by Smith [63], which showed the classic views
0096-3003/$ - see front matter � 2006 Elsevier Inc. All rights reserved.
doi:10.1016/j.amc.2006.10.017
* Corresponding author.E-mail addresses: [email protected], [email protected] (M. Ghatee), [email protected] (S.M. Hashemi).

556 M. Ghatee, S.M. Hashemi / Applied Mathematics and Computation 188 (2007) 555–566
such as ‘‘equisaturation’’ policy can not take optimal system with stable equilibrium. Besides, his examplesillustrated these control systems may increase total time of users’ journey up to 30%. Thus he proposed anew control system named as ‘‘PO’’ for obtaining maximum capacity and stability. Almost synchronously,Allsop and Charlesworth [5], employed a mutually consistent approach for signal optimization. In thisscheme, in each step of algorithm, first by a nonlinear optimization technique, optimal signal times are foundand then the results are reported to another level for assigning flows on the optimal pathes with respect to oneequilibrium principle. Also, they used metamodel approach in their work which is a worthwhile idea in sim-ulation optimization in recent works [10], i.e. polynomial interpolation for approximating the value of perfor-mance system was utilized. This idea is followed by many next engineers and scientists, e.g. an iterativeprocedure was made by Cantarella et al. [12] for equilibrium network traffic joint with optimal signal settings.However, Gershwin and Tan [32] revealed that signal timing and links flows which were obtained by Allsopand Charlesworth’ idea are not optimal in general. Sometimes after, Marcotte [47,48] presented an exactscheme and some heuristic methods for signal optimizing and obtained good results on his examples. Besides,in recent works, Cantarella et al. [13] presented some new heuristics for lane layout and signal setting. AlsoSmith [64,65] gathered the mathematical bases of this problem. In 90’s some attempts be happened under bile-vel programming. For example, Heydecher and Khoo [39] gave signal timing optimization by sequentially lin-ear approximation of traffic assignment. Also, Yang and Yagar [73] suggested a new and interesting idea withrespect to sensitivity analysis to solve these joint problems. Also Cascetta [14], gave two conditions withrespect to locally and globally optima for a given performance index. A classification of the methods for opti-mizing in these branches was published by Marcotte [48], Cantarella et al. [11–13]. Besides, a brief review onmethods for signal optimization and traffic assignment was gathered by Ghatee [33].
In utilizing nonlinear algorithms [8] for signal optimization, we may notice to papers presented by Smithet al. [65] and Clegg [22]. They used the steepest descent algorithm on equilibrium flows. Also Chiou [18] useda mixed search with projected gradient method which was previously utilized by Sheffi and Powell [60].Another interesting results has been given by experiments by Cascetta [14], Lee and Machemehl [44] whichshows different methods may produce diverse solutions. This contradiction is derived from nonconvexity ofproblem. Also they asserted as much as the dimension of network increases, the rate of saturation increases.Chiou [19,20] utilized some of these nonlinear methods for signal optimization and more generally controlproblem joint with traffic assignment and gave some interesting methods and heuristic for finding their opti-mal solutions. Cipriani [21] embedded Armijo rule in steepest descent algorithm and found optimal signals inurban interchanges. Also, simulation optimization which combines a meta-heuristic algorithm such as geneticalgorithm associate with assignment softwares such as PFE (Path Flow Estimator) is an important idea inrecent work published by Ceylan and Bell [15,16].
We believe this concept may be improved by network flows algorithms [1]. For example in [30, Section 3] acollection of the network flows methods such as multiobjective shortest path with respect to different labels [4],gateway paths [46], K-shortest paths [49], K-similar paths [59], dissimilar paths [3], Pareto dissimilar paths[25,26], virtual paths [62], side constrained traffic assignment with column generation [43,67], constrainedK-shortest paths [75], shortest paths with forbidden routes [69], stochastic shortest paths [51,52], multicriteriastochastic, time-varying paths [55] and fuzzy shortest path [54], was discussed. Also thank to the travellers’target to move through shortest paths, utilizing minimal cost multicommodity flow (MCMF) problem[6,41] appears as a reasonable choice. This concept is especially highlighted where ATIS (Advanced TravellerInformation System) is extended. So we can employ this approach as a sub-procedure in place of traffic assign-ment algorithms. MCMF problems with integer flows can be solved by combining Lagrangian relaxation tech-nique and branch and bound [28], also by price-directive or resource-directive decompositions. BesidesDantzig-Wolfe decomposition which iteratively solves Lagrangian subproblems has played an important rolefor multicommodity problem on column generation techniques, (see e.g. Ford and Fulkerson [29], Ahuja [1,Section 17] or Ghatee [30, Section 6] for a survey). Also some above addressed approaches such as K-shortestpaths, K-similar paths or dissimilar paths can be utilized for multicommodity problem with path-flow formu-lation as a heuristic in place of column generation [34]. Also some of these approaches which proposed byMiller-Hooks and Mahmashani [51,52] or Okada [54] can be utilized to model uncertainty in transportation.For example, with respect to same idea some combinatorial algorithms for transmitting one commodity wereproposed in [36] and for stochastic version with two-commodity in [45].

M. Ghatee, S.M. Hashemi / Applied Mathematics and Computation 188 (2007) 555–566 557
On the other hand, according to the results of experiments reported by Ceylan and Bell [15,16] mutuallyconsistent approach for signal optimization and traffic assignment in crisp manner may be diverge in manycases, thus these nondeterministic approaches need more experiments for implementing. On the other hand,each obtained result from crisp case may be used in uncertain case. Therefore we focus on deterministicand precise data in this paper instead of stochastic or fuzzy viewpoints. Also we wish exact optimal flowsfor multicommodity problem that can be found by interior point algorithms which reveal their efficiencyand polynomially time complexity in many practicable problems. This class of algorithms firstly has proposedby Karmakar [40] for general linear programming problems and has implemented on MCMF problems byTardos [66] and Vaidya [68] and was tested deeply on one-commodity network flows problem by Resendeand Veiga [58]. The published books by Hertog [38] and Ye [74] gives the main stream of this topic in recentyears. In this paper we use one of the first efficient interior point algorithm titled dual affine scaling algorithm,on MCMF problem. This method is useful by the proof of numerical examples.
The main contribution of this paper is pursuing the following two layer algorithm:
1. In external layer we find the optimal signal setting according to flows on network links. In this step, we usea descent direction algorithm as similar as Cipriani’s idae [21] for signal optimization. In each step of thislayer several MCMF problems are solved for finding deviations.
2. In internal layer, according to the signal timing which are lain on links impedances, we solve a multicom-modity problem for shipping the travellers on the shortest paths from the given origins to desirable desti-nations. In this step, we use dual affine scaling algorithm for obtaining link flows and finally the flows arereported to external layer.
3. The above two layers are repeated up to fulfilling stopping criteria.
In internal layer, interchanges are assumed be controlled by fixed-time signals. We optimize the green timefor each phase of intersection in peak hours for fixed-time interchanges, neither offset times nor intermediate(yellow) times. These items can be determined by expert. The objective function or performance index in thisresearch is given as sum of total delay for all travellers. Also the priority of phases is assumed fixed. In moretechnicality introducing, a coloring graph problem may be solved for getting the best statues with more safety.
The rest of paper is organized as follows: In the next section present fundamental of signal optimization.Then in Section 3, we study traffic assignment models. Signal optimization joint with traffic assignment is pur-sued in Section 4. In Section 5 we demonstrate the efficiency of our scheme with a numerical example. Section6 ends this paper with a conclusion and some suggestions for future directions.
2. Signal optimization modelling
We use the following modelling of signal optimization problem which is used by Chiou [20] and Cipriani[21] in recent works:
w� ¼ argminw PIðw; f �Þ; ð1Þ
s.t.0 6 wmina 6 wa 6 wmax
a ;
where w is control parameter vector and PI is the performance index according to the control and flow vectors.In addition f* is optimal flow respect to w. In this case, our target is to minimize PI which may be given as totaldelay for all network users as follows, see e.g. Marcotte [48]:
PIðw; f ðwÞÞ ¼Xe2E
Ceðwa; feðwÞÞ � feðwÞ; ð2Þ
In this function Ce is transportation cost on link e 2 E and a is a phase associate with link e. Also, we canuse the weighing combination of the number of stopping behind the signalized interchanges and total delay innetwork links, which was employed in TRANSYT [57] and used e.g. in [15,16]. Besides one can use the num-ber of users in the queue of each link [71]. But we believe that each of these definitions can be match by ourscheme for traffic assignment directly and so this does not decrease from generality. Moreover we consider

558 M. Ghatee, S.M. Hashemi / Applied Mathematics and Computation 188 (2007) 555–566
fixed cycle times and a fixed schedule and arrangement of phasing for each intersection and shall find the greentimes for rash times. If we optimize the green times for every intersections, according to usual velocity in eachlink, we can set signal times, such that drivers do not face with successive stops. Also for arranging the phases,experts’ points are very useful. For optimizing the signals three approaches are introduced in the literature.One of the most powerful methods consists of metaheuristic algorithms such as genetic algorithm [15,16].Since the corresponding problem is nonconvex, these methods are usually reasonable. These techniques arenamed simulation-optimization, because they usually are used by simulation softwares such as TRANSYT.Second group of algorithms are composed of analytic methods from nonlinear programming [8]. Theseschemes guarantee to find local optima not global one, expect for some convex situations. They usually usedifferential of objective function or its numerical and approximated forms. However, some of these techniquessuch as Fibonachi or Golden search do not need differential and work appropriately in some cases. The lastcategory of signal optimization algorithms uses integer programming algorithms such as branch and boundalgorithm joint with some heuristic such as Lagrangian relaxation [1], to find the optimal signal times. If thesealgorithms can be embedded in the networks models, they can be implemented more efficiently, e.g. see Wey[71] for combining a platoon model with minimum cost flow problem. In this paper we use steepest descentalgorithm which was utilized for signal optimization by Sheffi and Powel [60], Cascetta et al. [14], Lee andMachemehl [44] and Cipriani [21]. Although this algorithm has no guarantee to find global minima, but inthe worst case, it is able to find the local minima. In this algorithm, the following iterative formula is used:
wkþ1b ¼ wk
b þ arwz; ð3Þ
where z = PI is the performance index function. The main contribution of this algorithm is its approach forillustrating the following differential equation:ozðbÞowb
¼Xa2L
qaðwÞoca
oqa
oqa
owb
þ qaðwÞoca
owa
owa
owb
þ caðw; qaÞoqa
owb
� �; ð4Þ
where ozðbÞowb
is the variation of performance index function with respect to the control vector wb. By indepen-dently assumption on the signals, only for a = b the second term has nonzero value. Thus we arrive:
ozðbÞowb
¼ qbðwÞocb
oqb
þXa2L
qaðwÞoca
owa
þ caðw; qaÞoqa
owb
� �; ð5Þ
where a and b are two given links of network.
Since, the gradient of z(b) may be noncontinuous in several points, we can approximate it by some definitedifferences.
The most time-consuming part in this equation is calculating of oqaowb
which shows the variation rate of equi-
librium flow on link a considering signal time of phase b. Clearly, this item can not determine analytically.Thus Sheffi and Powel [60] have proposed a perturbation mechanism or sensitivity analysis. Let qa(. . . ,wb , . . .)be the equilibrium flow with respect to wb as green time in phase b. Consider small value Db as the variation ingreen time of this phase. We may determine qa(. . . ,wb + Db , . . .) for link a as equilibrium flow. So the partialdifferential can be obtained according to the following formula:
oqaðwÞowb
ffi qað. . . ;wb þ Db; . . .Þ � qað. . . ;wb; . . .ÞDb
: ð6Þ
Thus, in each step of algorithm, in determining the descent direction, we must solve a traffic assignment modelusing each couple of phases, which is not possible for real large scale networks. Also, a similar hardnessis revealed when we want ocbðwb;qbÞ
owbusing the following approximated formula:
ocbðwb; fbÞÞowb
ffi cbðwb þ D; fbÞ � cbðwb; fbÞD
: ð7Þ
To decrease from difficulties, the following fully-numerically method was proposed by Cipriani [21]:
ozðbÞowb
¼ zð. . . ;wb þ D; . . .Þ � zð. . . ;wb; . . .ÞD
: ð8Þ

M. Ghatee, S.M. Hashemi / Applied Mathematics and Computation 188 (2007) 555–566 559
By using this simple approach, we may lose accuracy. Thus a trading off between these aspects should be con-sidered. Another important question for iterative methods is determining step sizes. Based on the best reportedresults, transforming multivariable problem to one variable problem and utilizing Fibonachi or Golden searchis very useful (see e.g. Bazarra et al. [8] for details). Taking this idea into account, t* should be found from thefollowing simple optimization problem:
t� ¼ argmintP0 zðwk þ t � dkÞ; ð9Þ
where dk is a feasible direction for kth iteration.Also utilizing a continuous decreasing approach was proposed. But since this technique does not consider
the values of objective function, it may produces too many iterations. Also it may drop at a bad point in finalstatus. Thus in [21], ‘‘Armijo Rule’’ was employed for this problem. According to this rule, for given s,b 2 (0,1) and r 2 (0, 1) the following step size should be used for kth iteration:
ak ¼ bmk � s; ð10Þ
where mk is determined as the first integer satisfies the following expression:
ZðwkÞ � zðwk þ ak � dkÞP rrzðwkÞt � dk; ð11Þ
where dk is a given feasible direction for kth step.Since choosing b and r influence on iterations number and accuracy of solution, they should be calculatedcarefully. The following step-by-step algorithm is gathered as the above discussion:
Algorithm 2.1 (Steepest direction algorithm for signal optimization)
• Step 1. Set k = 0. Let s and � as the step size and stopping criteria are given. Assume w0 and f 0 be the initialsignal and flow in the network associate with z0 as the optimal value of performance index.
• Step 2. Set k = k + 1. Find the negative of gradient of objective function. That is, ath component of thisvector can be obtained as follows:
DzDwa
� �k
¼ zka � zk�1
a
Dwa
;
where zk�1a is the value of objective function on link a respect to wk�1
a as control vector and zka is the
same vector by small variation Dwa in the ath component of control vector.• Step 3. For fixed parameters b 2 (0,1) and r 2 (0,1) determine the step size ak ¼ bmk � s such that inequality
(11) fulfills.• Step 4. Determine the new solution wk from the following iterative sequence:
wk ¼ wk�1 � ak
maxafð DzDwaÞkg
:rzðwkÞ !
s.t.
wmin 6 wk6 wmax:
• Step 5. By utilizing a traffic assignment model find the new optimal flow f k and the optimal value of objec-tive function zk.
• Step 6. If j zk�zk�1
zk�1 j< � stop, otherwise go to Step (2).
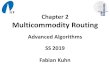
As mentioned before, it is not possible to optimize control parameters by ignoring the effects of trafficassignment patterns. Thus for constructing a mutually consistent approach [5], we need to introduce the trafficassignment model to predict drivers’ behavior. On the other hand since in such schemes traffic assignmentalgorithms are said frequently, and this is too much time consuming, we should pursue a more rapid proce-dure. Thus in the next section we utilize minimal cost multicommodity flow (MCMF) problem as a sub-pro-cedure for obtaining optimal flows. For this aim, we interpret each delay behind any intersection with a cost

Fig. 1. In the left the graph associate with phases of right intersection is presented.
560 M. Ghatee, S.M. Hashemi / Applied Mathematics and Computation 188 (2007) 555–566
link as it is shown in Fig. 1. Then, in the new transformed network, we transmit travellers from their origins todestinations through the shortest paths. The most important point of this simple transformation is that, thismethod helps us to tackle uncertain aspects by stochastic or fuzzy parameters as links’ label. Taking these intoaccount, we can solve already problem by using stochastic algorithms [51,52,72] or fuzzy models [54]. An ini-tially extension of this approach for one commodity flow was presented by Hashemi et al. [36]. But in thispaper we handle the most pessimistic state, i.e. we use the upper bound of traverse time on each link. Alsofor each link corresponding to a phase of signalized intersection, we utilize its red time. Clearly, this schemecan be used for other cases such as optimistic and average cases as well, see e.g. [37] for general statues. Nowwe consider a capacitated network which is the base for total travels.
3. Traffic assignment modelling
The mathematical model of traffic assignment problem which can be derived from the published papers byFisk [27], Sheffi[61], Akamatssu [2], Damberg et al. [24] and Bell [9] is commonly represented by a directedgraph where each link is associated with a travel cost function whereas the demands in terms of number oftrips are given by an origin-destination (OD) matrix. The classic assumption made in the models regardingthe distribution is the User Equilibrium (UE) principle. This principle, due to Wardrop’s wprk [70] asserts that‘‘the journey times on all the routes actually used are equal and less than those which would be experienced bya single vehicle on any unused route, see e.g. Ghatee [33] for a survey. With respect to the advances in trav-elling information systems, users wish to choose shortest paths for their trips. Thus we may use MCMF prob-lem which assigns the shortest paths to travellers such that minimal total delay in network is met and users tripon the shortest paths but not by selfish choosing.
3.1. Minimal cost multicommodity flow (MCMF) problem
This idea was utilized for traffic assignment in [17], also in [1] the main stream in this field is presented. Ageneral MCMF problem can be represented as follows:
minX
16k6K
Xði;jÞ2A
cki;j � xk
i;j;
s:t:
P16k6K
xki;j 6 ui;j; for each ði; jÞ 2 A;
Pj:ði;jÞ2A
xki;j �
Pj:ðj;iÞ2A
xkj;i ¼ bk
i ; for each i 2 N and 1 6 k 6 K;
ð12Þ
where xki;j is a positive integer which shows the amount of flow from kth commodity which tranships through
link (i, j), ui,j is the capacity of link (i, j) and K is the number of commodities. Moreover cki;j and bk
i is the unit-cost of shipment through link (i, j) and the imbalance (supply-demand) of node i respect to kth commodity.

M. Ghatee, S.M. Hashemi / Applied Mathematics and Computation 188 (2007) 555–566 561
This model assume capacity for links not nodes. Clearly, if we wish a capacity on node, we can transform itby inserting a capacitated link and a copied node associate with this node in the network [1]. Also, we canrewrite the first group of constraints as the following more appropriate form:
X16k6K
xki;j þ si;j ¼ ui;j; for each ði; jÞ 2 A:
In this case, si,j is the free capacity of link (i, j). One object may be inserted as follows which tries to minimizecongestion:
max minði;jÞ2A
si;j: ð13Þ
Also we can rewrite this problem based on path-flows as follows:
minXðr;sÞ
Xp2P r;s
cp � f r;sp ;
s:t:
Pp2P r;s
f r;sp ¼ dr;s; 8ðr; sÞ 2 C;
xi;j ¼P
p2P r;sdp;ðr;sÞ
i;j f r;sp 6 ui;j; ði; jÞ 2 A;
f r;sp ; xi;j P 0:
8>>>><>>>>:
ð14Þ
In this case Pr,s is the set of paths between origin r and destination s, (r,s) 2 C, which can be determined bypath column generation [1], multiobjective shortest path [4], gateway paths [46], K-shortest path [49], K-similarpath [59], dissimilar paths [3] or other similar approaches that are addressed in the previous sections. More-over dp;ðr;sÞ
i;j is 1 when link (i, j) lies in path p between (r, s) and otherwise it is zero.If the commodities be independent in link capacity, we may solve K subproblem with respect to each com-
modity. Otherwise a more complicated scheme shall be pursued. In addition the variables respect to theamount of vehicles on each link must be integer. Please note that, multicommodity problem differ fromone-commodity problem basically in this property, i.e. if all of the data in one-commodity problem be integral,the optimal solution is integral too. But there are some examples which show that this assertion is not valid formulticommodity models, see e.g. [1, Page 651] for an example. Thus we can not guarantee finding integraloptimal solution for multicommodity problem without a powerful heuristic such as branch and bound [42].Also Ghatee and Hashemi [34] have solved a more generalized version of this program by taking the effectof congestion into account and has presented a heuristic to find optimal transportation. For simplicity wedo not tackle integrality assumption in this paper and use approximated solution. For solving MCMF prob-lem three main approaches were introduced in the literature; Price-directive decomposition [23], resource-directive decomposition [31] and partitioning methods [35]. These schemes are utilized decomposition conceptwhich is a well-known method for large scale linear programming problems [7]. The first idea focus on thefinding optimal Lagrangian price of each link, while in the second approach the capacity of each link spitebetween commodities. The last idea is based on generalizing spanning trees in one-commodity flow problemfor multicommodity versions. Although according to the results of Kennington’s experiments [41] the price-directive and partitioning algorithms are the fastest algorithm for solving multicommodity flow problem andthese are two to five times faster than general linear programming, however these schemes may be produce alarge number of iterations for large urban networks. We believe that they are useful if the paths are chosencarefully according to the path enumeration methods addressed before. We are aware only one polyno-mial-time algorithm for multicommodity problem on a special planner graph [50]. In addition interior pointalgorithms [38,74] reveal their efficiency for large scale problems. That is their number of iterations increaseslowly, respect to the size of problem. These algorithms yield the only known polynomial-time bounds for gen-eral linear programming [68,66]. In this paper we follow an interior point algorithm named as Dual AffineScaling (DAS) which was tested on minimum cost flow problem by Resende and Veiga [58]. In bellow weadopt this algorithm from [53].
MCMF problem can be represent as the following matrix-form:
minfctx j Ax ¼ b; 0 6 x 6 ug;

562 M. Ghatee, S.M. Hashemi / Applied Mathematics and Computation 188 (2007) 555–566
where A is an m · n matrix and c, u, and x are n-dimensional vectors respectively and b is an m-dimensionalvector. Then dual affine scaling (DAS) solves this problem indirectly, by solving its dual
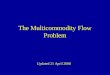
Fig. 2.signali
maxf bty � utz j Aty � zþ s ¼ c; z; s P 0g;
where z and s are n-dimensional vectors and y is an m-dimensional vector. The algorithm starts with an initialinterior solution {y0,z0, s0} such thatAt � y0 � z0 þ s0 ¼ c; z0; s0 P 0;
and iterates according to
fykþ1; zkþ1; skþ1g ¼ fyk; zk; skg þ afDy;Dz;Dsg;
where the search directions Dy, Dz, and Ds satisfyAðZ2k þ S2
kÞ�1AtDy ¼ b� AZ2
kðZ2k þ S2
k�1u;
Dz ¼ Z2kðZ2
k þ S2kÞ�1ðAtDy � S2
kuÞ;Ds ¼ Dz� AtDy;
where Zk ¼ diagðzk1; . . . ; zk
nÞ and Sk ¼ diagðsk1; . . . ; sk
nÞ; see Mitchell et al. [53] for details.
4. Signal optimization joint with traffic assignment
As mentioned before, the equilibrium flows and travel times are strongly influenced by the operation of sig-nals. Ways of using mathematical programming to solve the joint problem of signal settings and network flowhave been well researched. In this section we propose a scheme including decent direction algorithm in externallayer for signal optimization and a MCMF problem as a sub-procedure for obtaining optimal flows. We con-sider the most pessimistic case, i.e. we assume when one driver arrives to a signalized intersection and wishes touse a phase of intersection, he (she) is faced with starting of red time. Then he (she) have to stay through totalof red time. Besides since we meet with each phase as a link (Fig. 1), this red time can be interpreted as cost ofthat link. Thus if we minimize total transportation costs, the red times are minimized too. Thus we can pursuethe following algorithm:
Algorithm 4.1 (Signal optimization joint with traffic assignment)
1. Let k = 0, and choose � > 0 as stopping criteria.2. Choose the initial red times for each intersection and named such parameters with wa for phase a.
In the left a simple urban network with 13 nodes, 32 links and 5 intersections are depicted. In the right the phases according to 5zed intersections of left figure are represented.

M. Ghatee, S.M. Hashemi / Applied Mathematics and Computation 188 (2007) 555–566 563
3. According to link costs, by using the DAS algorithm find optimal flows on each link. Such flows aredenoted with f.
4. While k is less than a maximum iteration number, repeat the following steps.5. By using w and f as initial inputs using Algorithm (2.1) find optimal signals, denoted with w 0. In Algorithm
(2.1), use MCMF problem in place of other traffic assignment algorithms and solve such problems withDAS algorithm.
6. If the maximum difference between each component of w and w 0 is less than � set w, wþw02
as optimal redtime of signal setting and implement DAS algorithm for obtaining optimal flow with respect to w and stop.Otherwise set k = k + 1 and iterate step (4).
7. End.
5. Numerical example
In this section we want to examine our scheme on a network near to urban network topology. Consider thenetwork that is depicted in Fig. 2. This network consists of 13 nodes, 32 links and 5 signalized intersections.We consider 12 couples of origin-destination(s). The maximum and minimum of imbalances are taken as 200and 500, see Table 2, for details of network topology. In Fig. 2, also 20 phases which are known in this net-work are depicted schematically. In each phases 2 movements are valid. In Table 1 the amount of travellerswhom want to travel between each couple of origin-destination(s) are shown.
The capacity of intersections 3, 6, 7, 8 and 11 are assumed as 500, 800, 500, 900 and 600, respectively. Alsothe minimal and maximal green time for each phase are given as 10 and 70 seconds. Besides the cycle times are
Table 2The capacity and cost for the links of network which represented in Fig. 2
Link Ind. Capacity Cost Link Ind. Capacity Cost
1 500 400 17 500 2302 500 450 18 400 2203 300 430 19 200 2904 300 530 20 250 4505 300 550 21 220 4406 200 450 22 200 4907 500 550 23 300 5608 400 530 24 320 3209 350 650 25 200 650
10 200 620 26 210 75011 300 630 27 150 68012 250 520 28 120 95013 300 640 29 200 48014 300 630 30 250 56015 200 250 31 400 58016 250 240 32 300 600
Table 1The amount of travellers whom want to travel between each couples of origin-destination(s)
Origin-destination 1 4 5 9 10 12 13
1 200 5002 3004 3005 200 200 300 3009 200
10 400 4001213 300

Table 3The optimal signal setting according to 25 s as initial green times
Ind. Int. N. Phase
1 2 3 4
3 45 45 45 456 53 53 53 407 55 55 38 398 57 57 10 57
11 37 37 37 37
564 M. Ghatee, S.M. Hashemi / Applied Mathematics and Computation 188 (2007) 555–566
considered as 180, 200, 190, 180 and 150 for intersections 3, 6, 7, 8 and 11, respectively. We use MATLAB 7.for implementing our scheme. As mentioned before, we transform delays behind each phase as some costs withrespect to some dummy links. The transformed network for our implementing has 52 nodes and 116 links. Wehypothesize 25 seconds for green times of each phase as initial solution. The optimal signal setting consideringthese initial values are shown in Table 3.
6. Conclusion
In this paper we review on some references which have been mentioned that in an urban road network con-trolled by fixed-time signals, there is an interaction between the signal timings and the routes chosen by indi-vidual road users. Taking this important concept into account, we present an efficient scheme to investigatesignal optimization joint with optimal flows. We use descent direction algorithm for signal optimizationand minimal cost multicommodity flow (MCMF) model for determining optimal flows. Since the most timeconsuming part in such schemes is traffic assignment algorithms, we try to solve MCMF problem with an effi-cient interior point algorithm which has named as DAS algorithm. We show this scheme can find optimalgreen times with few iterations. Also we tackle pessimistic case for signal modelling in our scheme, but wecan pursue similar strategy for optimistic and most visible cases, too. Studying such problem consideringuncertain parameters with interval and fuzzy numbers are left to the next works.
Acknowledgements
We highly appreciate several insightful discussions with Prof. S. Afandizadeh (Iran University of Scienceand Technology), Prof. H. Salehi (Tehran University) and Prof. E. Khorram (Amirkabir University ofTechnology).
References
[1] R.K. Ahuja, T.L. Magnanti, J.B. Orlin, Network Flows: Theory Algorithms and Applications, Prentice-Hall, Engelwood Cliffs, NJ,1993.
[2] T. Akamatssu, Cyclic flow, Markov process and stochastic traffic assignment, Transportation Research Part B 30 (1996) 369–386.[3] V. Akgun, E. Ercut, R. Batta, On finding dissimilar paths, European Journal of Operational Research 121 (2000) 232–246.[4] M.B. Akiva, M.J. Bergman, A.J. Daly, R. Ramaswamy, Modeling inter-urban route choice behaviour, in: J. Volmuller, R.
Hamerslag (Eds.), Proceedings Ninth International Symposium on Transportation and Traffic Theory, VNU Science Press, Utrechut,1984, pp. 299–330.
[5] R.E. Allsop, J.A. Charlesworth, Traffic in a signal controlled road network: An example of different signal timings including differentrouting, Traffic Engineering and Control (1977) 262–264.
[6] A.A. Assad, Multicommodity network flows: A survey, Networks 8 (1978) 37–91.[7] M.S. Bazarra, J.J. Jarvis, H.D. Sherali, Linear Programming and Network Flows, Wiley, New York, NY, 1990.[8] M.S. Bazaraa, H.D. Sherali, C.M. Shetty, Nonlinear Programming, Theory and Algorithms, John Wiley and Sons, New York, 1993.[9] M.G.H. Bell, Alternative to Dial’s logit assignment algorithm, Transportation Research Part B 29 (1995) 287–295.
[10] R.W. Blanning, The construction and implementation of metamodels, Simulation (1975) 177–184.[11] G.E. Cantarella, G. Improto, A. Sforza, Road network signal setting: equilibrium conditions, in: M. Papageorgiou (Ed.), Concise
Encyclopedia of Traffic and Transportation Systems, Pergamon Press, 1991, pp. 366–371.[12] G.E. Cantarella, G. Improto, A. Sforza, An iterative procedure for equilibrium network traffic signal setting, Transportation
Research Part A 24 (1991) 241–249.

M. Ghatee, S.M. Hashemi / Applied Mathematics and Computation 188 (2007) 555–566 565
[13] G.E. Cantarella, G. Pavone, A. Vitetta, Heuristics for urban road network design: Lane layout and signal settings, European Journalof Operational Research 175 (2006) 1682–1695.
[14] E. Cascetta, M. Gallo, B. Montella, Optimal signal setting on traffic networks with stochastic equilibrium assignment, in: Tristan IIIConference, San Juan, Puerto Rico, June 17–23, vol. 2, 1998.
[15] H. Ceylan, M.G.H. Bell, Traffic signal optimization based on genetic algorithm approach, including drivers routing, TransportationResearch Part B 38 (2004) 329–342.
[16] H. Ceylan, M.G.H. Bell, Genetic algorithm solution for the stochastic equilibrium transportation networks under congestion,Transportation Research Part B 39 (2005) 169–185.
[17] R.J. Chen, R.R. Meyer, Parallel optimization for traffic assignment, Mathematical Programming 42 (1988) 327–345.[18] S.W. Chiou, Optimization of area traffic control for equilibrium network flows, Transportation Science 33 (1999) 279–289.[19] S.W. Chiou, Bilevel programming for continuous transport network design problem, Transportation Research Part B 37 (2003) 263–
290.[20] S.W. Chiou, Joint optimization for area traffic control and network flow, Computers and Operations Research 32 (2005) 2821–
2841.[21] E. Cipriani, G. Fusco, Combined signal setting design and traffic assignment problem, European Journal of Operational Research 155
(2004) 569–583.[22] J. Clegg, M. Smith, Y. Xiang, R. Yarrow, Bilevel programming applied to optimizing urban transportation, Transportation Research
Part B 35 (2001) 41–70.[23] J.E. Cremeans, R.A. Smith, G.R. Tyndall, Optimal multicommodity network flows with resource allocation, Naval Research
Logistics Quarterly 17 (1970) 269–280.[24] O. Damberg, J.T. Lundgren, M. Patriksson, An algorithm for the stochastic user equilibrium problem, Transportation Research B 30
(1996) 115–131.[25] P. Dell’Olmo, M. Gentli, A. Scozzari, Finding dissimilar routes for the transportation of hazardous materials, in: 13th Mini-EURO
Conference on Handling Uncertainty in Transportation Analysis, Bari, Italy, June 10–13, 2002.[26] P. Dell’Olmo, M. Gentli, A. Scozzari, On finding dissimilar Pareto-optimal path, European Journal of Operational Research 162
(2005) 70–82.[27] C. Fisk, some developments in equilibrium traffic assignment, Transportation Research Part B 14 (1980) 243–255.[28] M.L. Fisher, The Lagrangian relaxation method for solving integer programming problems, Management Science 27 (1981) 1–18.[29] L.R. Ford, D.R. Fulkerson, A suggested computation for maximal multicommodity network flows, Management Science 5 (1958) 97–
101.[30] M. Ghatee, Network algorithms for signal optimization and traffic assignmnet with fuzzy extensions, M.S.D thesis, Department of
Applied Mathematics, Faculty of Mathematics and Computer Sciences, Amirkabir University of Technology, Tehran, Iran, 2005 (inPersian).
[31] A.M. Geoffrion, G.W. Graves, Multicommodity distribution system design by Benders decomposition, Management Science 20(1974) 822–844.
[32] S.B. Gershwin, H.N. Tan, Hybrid optimisation: optimal static traffic control constrained by drivers’ route choice behaviour,Laboratory for Information and Decision System Report LIDS-p-870, 1979, Massachusetts Institute of Technology.
[33] M. Ghatee, Network algorithms for signal optimization and traffic assignmnet with fuzzy extensions, M.S.D thesis, Department ofApplied Mathematics, Faculty of Mathematics and Computer Sciences, Amirkabir University of Technology, Tehran, Iran, 2005 (inPersian).
[34] M. Ghatee, S.M. Hashemi, Minimal cost and congestion multicommodity integral flow problem using genetic algorithm with feasible-chromosome on preferred, submitted for publication.
[35] G.W. Graves, R.D. McBride, The factorization approach to large scale linear programming, Mathematical Programming 10 (1976)91–110.
[36] S.M. Hashemi, M. Ghatee, E. Nasrabadi, Combinatorial algorithms for the minimum interval cost flow problem, AppliedMathematics and Computations 175 (2006) 1200–1216.
[37] S.M. Hashemi, M. Ghatee, B. Hashemi, Fuzzy goal programming: Complementary slackness conditions and computational schemes,Applied Mathematics and Computations 179 (2006) 506–522.
[38] D.D. Hertog, Interior Point Approach to Linear Quadratic and Convex Programming: Algorithms and Complexity, KluwerAcademic Publishers, Netherlands, 1994.
[39] B.G. Heydecher, T.K. Khoo, The equilibrium network design problem, in: Proceeding of AIRO’90 Conference on Models andMethods for Decision Support, Sorrento, 1990, pp. 587–602.
[40] N. Karmarkar, A new polynomial-time algorithm for linear programming, Combinatorica 4 (1984) 373–395.[41] J.L. Kennington, A survey of linear cost multicommodity network flows, Operation Research 26 (1978) 209–236.[42] M. Junger, S. Thienel, The ABACUS system for branch-and-cut-and-price algorithms in integer programming and combinatorial
optimization, Software: Practice and Experience 30 (2000) 1325–1352.[43] T. Larsson, M. Patriksson, C. Rydergren, A column generation procedure for the side constrained traffic equilibrium problem,
Transportation Research Part B 38 (2004) 17–38.[44] C. Lee, R. Machemehl, Local and iterative search for the combined signal control and assignment problem: implementation and
numerical examples, in: 78th Transportation Research Board Meeting, Washington, January 1999.[45] Y.K. Lin, Two-commodity reliability evaluation for a stochastic-flow network with node failure, Computers and Operations Research
29 (2002) 19271939.

566 M. Ghatee, S.M. Hashemi / Applied Mathematics and Computation 188 (2007) 555–566
[46] K. Lombard, R.L. Church, The gateway shortest path problem: Generating alternative routes for a corridor location problem,Geographical Systems 1 (1993) 25–45.
[47] P. Marcotte, An analysis of heuristics for the network design problem, in: V.F. Hurdle, E. Hauer, G.N. Steuart (Eds.), Proceeding ofthe Eighth International Symposium on Transportation and Traffic Theory, Elsevier,, New York, 1981, pp. 26–35.
[48] P. Marcotte, Network optimization with continuous control parameters, Transportation Science 17 (1983) 181–197.[49] E.D.Q.V. Martins, M.M.B. Pascoal, J.L.D. Santos, Deviation algorithms for ranking loopless paths, International Journal of
Foundations of Computer Science 10 (1999) 247–261.[50] K. Matsumoto, T. Nishizeki, N. Sarro, An efficient algorithm for finding multicommodity flows in planar networks, SIAM Journal on
Computing 14 (1985) 289–302.[51] E. Miller-Hooks, H. Mahmashani, Least expected time paths in stochastic, time varying transportation networks, Transportation
Science 34 (2000) 198–215.[52] E. Miller-Hooks, H. Mahmassani, Path comparisons for a priori and time-adaptive decisions in stochastic, time-varying networks,
European Journal of Operational Research 146 (2003) 67–82.[53] J.E. Mitchell, P.M. Pardalos, M.G.C. Resende, Interior Point Methods for Combinatorial Optimization, in: D.Z. Du, P.M. Pardalos
(Eds.), Handbook of Combinatorial Optimization, Kluwer Academic Publishers, 1998.[54] S. Okada, T. Soper, A shortest path problem on a network with fuzzy arc lengths, Fuzzy Sets and Systems 109 (2000) 129–140.[55] S. Opasanon, E. Miller-Hooks, Multicriteria adaptive paths in stochastic, time-varying networks, European Journal of Operational
Research 173 (2006) 72–91.[56] O. Pavese, La funzione delle intersezioni in un modello di assegnazione det traffico a reti stradali. Segnalazioni stradali, n.34, marzo-
aprile, 1968.[57] D.I. Robertson, TRANSYT method for area traffic control, Traffic Engineering and Control 10 (1969) 276–281.[58] M.G.C. Resende, G. Veiga, An implementation of the dual affin scaling algorithm for minimum cost flow on bipartite uncapaciated
networks, SIAM Journal on Optimization 3 (1993) 516–537.[59] K. Scott, D. Bernstein, Finding Alternatives to the Best Path, Princeton University, Research paper, New Jersey Tide Center, 1997.[60] Y. Sheffi, W.B. Powel, Optimal signal setting over transportation networks, Journal of Transportation Engineering 109 (6) (1983)
824–839.[61] Y. Sheffi, Urban Transportation Networks: Equilibrium Analysis with Mathematical Programming Methods, Prentice-Hall, USA,
1985.[62] C.C. Shyur, U.P. Wen, Optimizing the system of virtual paths by tabu search, European Journal of Operational Research 129 (2001)
650–662.[63] M.J. Smith, A local traffic control policy which automatically maximizes the overall travel capacity of an urban road network, Traffic
Engineering and Control (1980) 298–302.[64] M.J. Smith, T. Van Vuren, Traffic equilibrium with responsive traffic control, Transportation Science 17 (2) (1993) 118–132.[65] M.J. Smith, Y. Xiang, R.A. Yarrow, M. Ghali, Bilevel and other modeling approaches to urban traffic management and control, in:
P. Marcotte, S. Nguyen (Eds.), Equilibrium and Advanced Transportation Modeling, Kluwer Academic Publisher, Boston, 1998, pp.283–325.
[66] E. Tardos, A strongly polynomial algorithm to solve combinatorial linear programs, Operations Research 34 (1986) 250–256.[67] J.A. Tomlin, A linear programming model for the assignment of traffic, in: Proceeding of the Third Conference of the Australian
Road Research Board 3, 1966, pp. 263–271.[68] P.M. Vaidya, Speeding up linear programming using fast matrix multiplication, in: Proceedings of the 30th Annual Symposium on the
Foundations of Computer Science, 1989, pp. 332–337.[69] D. Villeneuve, G. Desaulniers, The shortest path problem with forbidden paths, European Journal of Operational Research 165
(2005) 97–107.[70] J.G. Wardrop, Some theoritical aspects of road traffic approach, Proceedings of the Institution of Civil Engineers Part II (1952) 325–
378.[71] W.M. Wey, Model formulation and solution algorithm of traffic signal control in an urban network, Computers, Environment and
Urban Systems 24 (2000) 355–377.[72] B. Yang, E. Miller-Hooks, Adaptive routing considering delays due to signal operations, Transportation Research Part B 38 (2004)
385–413.[73] H. Yang, S. Yagar, Traffic assignment and signal control in saturated road network, Transportation Research Part A 29 (2) (1995)
125–169.[74] Y. Ye, Interior Point Algorithms Theory and Analysis, Wiley, New York, 1997.[75] N.V.D. Zijpp, S.F. Catalano, Path enumeration by finding the constrained Kshortest paths, Transportation Research Part B 39
(2005) 545–563.