Embed Size (px)
Citation preview

Dedicated Systems Experts 2005 - Martin TIMMERMAN p. 1
OS: the state of the art
Module 2Scheduling and memory
management

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 2
Content of module 2
a. Introduction: what is an operating system
b. RTOS architecturesc. Schedulingd. Memory Managemente. Conclusions

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 3
Documentation
• This presentation• Evaluation reports
– http://www.dedicated-systems.com
• This course website– http://vub.dedicated-systems.com– Username: vubuser– Code: vubdse1!

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 4
www.dedicated-systems.com

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 5

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 6

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 7

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 8

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 9
OS: a definition
• GENERAL PURPOSE OS (GPOS): – A GPOS is a collection of programs that
acts as an intermediary between the hardware and its user(s), providing a high-level interface to low level hardware resources, such as the CPU, memory, and I/O devices.

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 10
GPOS: PURPOSE
• To provide an environment with facilities and services that make the use of the hardware– Convenient – Efficient– Safe– Secure
• Sharing of resources among users and/or programs

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 11
GPOS: facilities & services
• Memory management• Process management• Communication facilities• A command language interpreter or
GUI• A file system• ....

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 12
OS TYPES
data-base
off-line
personalcomputing
Timesharing
on-line
batch remote batch
user-Program-
mable
non-Program-
mable
multi-user single-user
Responserequirements
Protection Requirements
real-time
In 1980

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 13
no compilers time software shared multi-user
resident monitors
Migration of OS concepts and features
1950 1960 1970 1980 1990
no compilers time software shared multi-user
batch resident
monitors
Minicomputers
MULTICS
UNIX
no compilers interactive software multi-user
resident . monitors .
UNIXMicrocomputers
Mainframes
1940
distributedsystems
2000

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 14
GPOS - RTOS
• GPOS– Multiple applications on one system– Maximum resource usage– Average performance is important
• RTOS– A single application on a system– Reliably– Predictability = time constraints on
individual events

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 15
Real-Time OS: too many or too few?
• An enormous quantity of RTOS are available today
• Free – commercial – with/without source – experimental…
• Some are competitive, others are complementary
• The miss-choice of an RTOS may have dramatic results on a project

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 16
Some Embedded (Real-Time) OS
• AMX (KADAK)• CExecutive (JMI)• CHORUS (Jaluna C5)• CX/UX (HARRIS)• eCos• FlexOS (NOVELL)• iRMX (Intel)• LynxOS (Lynx)• Linux flavours• OSE (ENEA DATA)• OS9 (Microware)
• PDOS (Eyring Research)• (pSOS+) (WindRiver)• QNX (QNX)• Real/IX (Modcomp AEG)• SPECTRA (VRTX) (Mentor
Graphics)• SMX (Micro Digital)• SunOS (Sun)• Symbian• VXWorks (Wind River)• Windows CE• Windows XP embedded

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 17
Thesis
General purpose systems are migrating from mainframe to distributed Client-Server technologies. A Real-Time System is
distributed by nature and is using this technology for some years already.
General purpose systems are migrating from mainframe to distributed Client-Server technologies. A Real-Time System is
distributed by nature and is using this technology for some years already.
Real-Time & General Purpose OS technology is melting together.
Real-Time & General Purpose OS technology is melting together.

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 18
Scenario for the presentations (1)
RequirementRequirement
• What are the requirement for a good RTOS?

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 19
Scenario (2)
• Examples: – Of real product situations– Some examples show product problems
which are in most cases resolved by now• In new release• Except for NTe – XPe – Linux (because non
RT!)

Dedicated Systems Experts 2005 - Martin TIMMERMAN p. 20
Testing scenario

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 21
evaluation test platform• Pentium 200 MMX
– Reference platform– Not really an embedded processor– Is faster than most embedded processors
• PPC– ATX platform with MPC7410 PPC 400 MHz
• ARM9– ATX module: Integrator AP/CM920 T
• Hardware logic analyser for measurements
(10 ns resolution)– No tricks with on-boards timers– No resolution problems with these timers

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 22
Development Platforms

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 23
Pictures

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 24
Test examples
• Platform calibration– To compare results with different
processors• Performance measurements
– Thread creation, switching, deletionInterrupt latencies under load conditions Semaphore/mutex creating, release,..
• Behaviour– Queues: Task/thread, Semaphore/mutex– Application simulation
• Endurance tests

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 25
Test procedure• Starttime: Before starting an OS call write a
trace to PCI bus – capture with (PCI) analyser• Start the call• Stoptime: At the end of the call – write again
a trace to the PCI bus – capture with analyser• Do this as many times as possible – limited
to the size of the analyser trace buffer• Do the same test in different circumstances
– No other activity– A lot of other activity (processor load)
• Event = system activity between start and stop
• Eventtime = stoptime - starttime

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 26
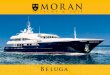
Measurements:sample diagram
3000
3900
4800
5700
6600
7500
8400
9300
10200
11100
12000
0 10000 20000 30000 40000 50000
absolute time (µs)
even
t d
ura
tio
n (
ns)
All public tests on 200 MHz Pentium MMX motherboard platform

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 27
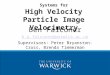
Measurements:histogram
1
100
10000
1000000
3000 3900 4800 5700 6600 7500 8400 9300 10200 11100 12000
time (ns)
nb
r o
f ev
ents

Dedicated Systems Experts 2005 - Martin TIMMERMAN p. 28
End of M2aIntroduction

Dedicated Systems Experts 2005 - Martin TIMMERMAN p. 29
Module 2 b:RTOS Architecture

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 30
Good RTOS – REQ: OS structure
A good RTOS needs a Client/Server architectureA good RTOS needs a Client/Server architecture

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 31
OS STRUCTURE
• Simple or monolithic structure• Layered Approach• Client/Server model

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 32
Software Layers (1)
Hardware
System software
ApplicationsImplemented in software

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 33
The RT way
Hardware
Applications
System software

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 34
Software Layers (2)
Hardware
System software
Applications
Languagetranslators
Operatingsystem
UtilityPrograms

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 35
Software Layers (3)
Hardware
System software
Applications
Kernel
Memory manager
I/O system
File manager
Short-term scheduler
Resource manager
Long-term scheduler
Command interpreter
Languagetranslators
Operatingsystem
UtilityPrograms

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 36
Monolithic OS
ApplicationProgram
ApplicationProgram
. . .
User Mode
Kernel Mode
System Services
Hardware
OperatingSystem
Procedures

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 37
Client/server OS = REQ
ClientApplication
DisplayServer
User Mode
Kernel Mode
Hardware
Microkernel
FileServer
ProcessServer
MemoryServer
NetworkServer
Send
Reply

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 38
Client/server OS: advantages
• OS components are small and self-contained
• a single server may fail and be restarted (user mode) without corrupting the rest of the OS
• different servers may run on different processors = easy distributed environments

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 39
Client/server examples
• New approach– Chorus (now Jaluna C5) (EU)– QNX neutrino = QNX 6.x (CANADA)– VxWorks 6.x ??? (US)
• Inherent (old) approach– OSE (EU)– VXWorks 5.x (US)– VRTX (US)– - ..

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 40
Good RTOS – REQ:OS architecture
Whatever architecture is used, it should be clearly documented and published.
Whatever architecture is used, it should be clearly documented and published.

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 41
Example of different architectures
• Basic NT architecture• RTX• INTIME

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 42
RTX 4.1 (version 2) their view

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 43
INtime - their view

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 44
Simplified Basic NT architecture
Hardware
HAL
NT-Kernel I/O MgrDev.Dr.
Win32
thre
ad
process
Win32
thre
ad
process
Win32
thre
ad
process
Win32
thre
ad
process

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 45
RTX - our view
Hardware
HAL
NT-Kernel I/O MgrDev.Dr.
Win32
thre
ad
process
Win32
thre
adproces
s
RT-API
thre
ad
process
RT-API
Timer - irq handling
scheduler
thre
ad
process
RT-API
RIN
G 3
RIN
G 0

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 46
INtime - our view
Hardware
HAL
NT-Kernel I/O MgrDev.Dr.
Win32
thre
ad
process
Win32
thre
adproces
s
NTX
thre
ad
processRT-API
scheduler
thre
ad
processRT-API
RIN
G 3
RIN
G 0
MEM
NTXdriver
NTXdriver
Timer - irq handling
process
process

Dedicated Systems Experts 2005 - Martin TIMMERMAN p. 47
End of M2bRTOS architecture

Dedicated Systems Experts 2005 - Martin TIMMERMAN p. 48
Module 2 c:Processor(s)
management: scheduling

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 49
M2c: Processor(s) Management
Single processor issues• Scheduling in general• A simple introduction to OS-
scheduling• Scheduling for RT-Systems
Multiple processor issues (later – Module x)

Dedicated Systems Experts 2005 - Martin TIMMERMAN p. 50
Scheduling in general

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 51
Scheduling in general
• Scheduling = ressource sharing• Resource
– Processor: “scheduling”– Disk: “disk scheduling”– Bus: “arbitration”– Network– ....– Human, material: “project planning”

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 52
Scheduling = Arbitration = Disk Scheduling
= Project Planning
Common Resource
Object 1
Object 2 Object 3
Object 4
all objects want to use the resource simultaneously = need for arbitration or scheduling

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 53
Scheduling
Processor
Task 1
Task 2 Task 3
Task 4
all bus masters want to use the processor simultaneously = need for scheduling

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 54
IEEE’ s Scheduler
• IEEE 610.12-1990 (standard glossary of software engineering terminology)– A computer program, usually part of an
operating system, that schedules, initiates and terminates jobs.

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 55
Arbitration
Bus
Bus Master 1
Bus Master 2 Bus Master 3
Bus Master 4
all bus masters want to use the bus simultaneously = need for arbitration

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 56
IEEE’ s Arbitration
• IEEE 959 - 1987 (SBX)– The process of determining which requested
device will gain access to a resource
• IEEE 1000 - 1987 (STEbus)– The means whereby masters compete for
control of the bus and the process by which a master is granted control of the bus.
• IEEE 1196 - 1987 (VSB)– A collection of mechanisms that allow masters
to access the bus without conflicting with each other.

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 57
Arbitration = Scheduling
• For n levels of priority• (Preemptive) Priority (for Real-Time
Systems)– n > n-1 > .......... > 1
• Round Robin Select– n = n-1 = .......... = 1
• Mixed modes
nn-11
2
i
VMEbusVMEbus
levelslevels
44
PCIPCI # slots# slots
RTOSRTOS 256256

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 58
Disk Scheduling
Disk
AccesRequest
1Acces
Request 2
AccesRequest
3
AccesRequest
4
different requesters want to use the disk simultaneously = need for scheduling

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 59
JOB and PROCESSOR SCHEDULING
• Scheduling levels• Scheduling objectives• Scheduling criteria• Pre-emptive vs Non pre-emptive • The interval timer• Priorities• Discussion of scheduling methods

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 60
Scheduling levels Jobs waiting for entry
Jobs waiting
for initiation
Suspendedprocesseswaiting foractivation
Activeprocesses
Running processes
Completed
Complete
DispatchBlock or timerout
Active Suspend
Job initiation
Job entry
High-level scheduling
Intermediate-level scheduling
Low-level scheduling
Running
Ready Blocked
Block
Timerrunout
Dispatch
Wakeup

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 61
Scheduling levels - GPOS• High-level scheduling = job scheduling
– job or admission scheduling– compete for the resources of the system– jobs become processes or groups of processes
• Intermediate-level scheduling– which process competes for the CPU(s)– is a buffer between admission of jobs and
assigning them to the CPU• Low-level scheduling = process/thread
scheduling– performed by the dispatcher which is all the
time in primary storage– which ready process will be assigned the CPU

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 62
Possible Scheduling objectives• Fair• Maximize throughput• Maximum number of interactive users• Be predictable and respect deadlines• Minimize overhead• Balance resource use• Balance response and utilization• Avoid indefinite postponement• Enforce priorities• Preference to processes holding key resources• Better service to P with desirable behavior• Graceful degradation under heavy loads

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 63
Scheduling criteria in general• Consider
– That a process can be• I/O bounded• CPU bounded• batch or interactive
– How urgent is a fast response– Process priority– how frequently a process
• is generating page faults• has been pre-empted by a higher priority process
– how much • real execution time has been received• more time is needed to finish

Dedicated Systems Experts 2005 - Martin TIMMERMAN p. 64
Processor Schedulinga simple introduction

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 65
Scheduling mechanismsa simple introduction
• Single event system• Multiple event system• Use scheduling with RR and a ticker• Use priorities• Pre-emption

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 66
Single event system
respond to event
? eventNo
Yes
Deadline = respond to event time + jitter on event detection

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 67
Multiple event system 1
respond to event A
wait forevent A
respond to event B
wait forevent B
respond to event C
wait forevent C
A B C
A, B & C ordered

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 68
Multiple event system 2
? event A1 ms
respondto
event A40 ms
? event B1 ms
respondto
event B35 ms
? event C1 ms
respondto
event C30 ms
A B C
A, B & C random
total loop time: 108 mstotal loop time: 108 ms
Y
Y
Y

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 69
•Exec times: •A: 40 ms•B: 35 ms•C: 30 ms
•Deadlines:•A: 100 ms•B & C: 150 ms
•Exec times: •A: 40 ms•B: 35 ms•C: 30 ms
•Deadlines:•A: 100 ms•B & C: 150 ms
? event A1 ms
respondto
event A40 ms
? event B1 ms
respondto
event B35 ms
? event A1 ms
respondto
event A40 ms
? event C1 ms
respondto
event C30 ms
Y
Y
Y
YA: 40 ms C: 30 msB: 35 ms A: 40 ms
time

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 70
? event A1 ms
respondto
event A40 ms
? event B1 ms
respondto
event B35 ms
? event A1 ms
respondto
event A30 ms
? event C1 ms
respondto
event C30 ms
•Exec times: •A: 40 ms•B: 35 ms•C: 30 ms
•Deadlines:•A: 100 ms•B: 130 ms•C: 150 ms
•Exec times: •A: 40 ms•B: 35 ms•C: 30 ms
•Deadlines:•A: 100 ms•B: 130 ms•C: 150 ms
? event B1 ms
respondto
event B35 ms
Y
Y
Y
Y
Y

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 71
? event A1 ms
respondto
event A40 ms
? event B1 ms
respondto
event B35 ms
? event A1 ms
respondto
event A40 ms
? event C1 ms
respondto
event C30 ms
•Exec times: •A: 40 ms•B: 35 ms•C: 30 ms
•Deadlines:•A: 100 ms•B: 130 ms•C: 150 ms
•Exec times: •A: 40 ms•B: 35 ms•C: 30 ms
•Deadlines:•A: 100 ms•B: 130 ms•C: 150 ms
? event B1 ms
respondto
event B35 ms
Y
Y
Y
Y
Y
Total loop time:149 ms
Total loop time:149 ms

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 72
Basic ingredients for scheduling
• Ticker• A state machine concept

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 73
EXECUTIVEEXECUTIVE
Task ATask A
Task BTask B
Task CTask C
respond to event
? event No
Yes

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 74
CPUCPU
TIMER - TICKERTIMER - TICKERRepetitive Interrupt
timeX ms

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 75
A: 40 ms B: 35 ms A: 40 ms C: 30 ms
time slice: 41 ms = best solution
time
A: 40 ms C: 30 msB: 35 ms A: 40 ms
Solution with just one program
Is it better?

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 76
150170190210230250270290
2 7
12
17
22
27
32
37
42
47
52
57
Total time = f (timeslice)
Total time
timeslice

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 77
execputs taskto sleep
execputs taskto sleep
execwakes up
task
execwakes up
task
execute trap
instruction
execute trap
instruction
respondto
event
respondto
event
hasevent
occurred?
hasevent
occurred?
Why is it worse?
Happens occasionally

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 78
execputs taskto sleep
execputs taskto sleep
execwakes up
task
execwakes up
task
execute trap
instruction
execute trap
instruction
respondto
event
respondto
event
THE solution
BUT: who is detectiong the event??
The OS = the device driver!

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 79
EXECUTIVEEXECUTIVE
Task ATask A
Task BTask B
Task CTask C
respond to event C
respond to event B
respond to event A

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 80
Process states & transitions
Running
Ready Blocked
Block
Timer-runout
Dispatch
Wakeup

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 81
Queues – 4 processors
Running
Ready Blocked
Block
Timer-runout
Dispatch
Wakeup

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 82
Queues – 1 processors
Running
Ready Blocked
Block
Timer-runout
Dispatch
Wakeup

Dedicated Systems Experts 2005 - Martin TIMMERMAN p. 83
Different scheduling algorithms

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 84
Some scheduling mechanisms
• http://en.wikipedia.org/wiki/Category:Scheduling_algorithms
• FIFO• Round Robin• Multilevel feedback queues• Shortest job first (SJF)• Shortest remaining time

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 85
FIFO scheduling
C AB
Ready list
A CPUcompletion

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 86
Round Robin scheduling (RR)
C AB
Ready list
A CPUcompletion

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 87
Multilevel feedback queues
CPUcompletion
CPUcompletion
CPUcompletion
Level 1
Level 2
Level 3

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 88
Shortest-job-first
• non pre-emptive scheduling• waiting job with smallest estimated
run-time-to-completion is run next• requires precise knowledge of how
long a job will last• once a job is started it runs to
completion

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 89
Shortest-remaining-time
• Pre-emptive counterpart of SJF• job with shortest estimated runtime
to completion runs next• should keep track of elapsed time
(creates more overhead)

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 90
Good RTOS – REQ:A deadline scheduler
A good RTOS needs a deadline scheduling mechanism.This technology is NOT (yet?) available.
Pre-emptive scheduling is an acceptable replacementif RMA is used
A good RTOS needs a deadline scheduling mechanism.This technology is NOT (yet?) available.
Pre-emptive scheduling is an acceptable replacementif RMA is used

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 91
Deadline scheduling problem
• Precise resource requirements should be known in advance
• The system must carefully plan its resource requirements through to the deadline
• Knowledge of task execution time is needed.
• What if many deadline jobs exists together?• scheduling algorithm complexity introduces
(serious) overhead

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 92
Waiting for deadling scheduling(if ever)
• Pre-emptive priority scheduling• Rate Monotonic Analysis• Earliest deadline• Least slack• ..• Time triggered

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 93
TASK A (40)
TASK B (35)
ISR A ISR B
TASK C (30)
timeslice: 25
Priority Scheduling
time

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 94
TASK A (40)
TASK B (35)
ISR A ISR B
TASK C (30)
timeslice: 25
Pre-emptive Priority Scheduling
time

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 95
TASK A (40)
TASK B (35)
ISR B ISR A
TASK C (30)
timeslice: 25
Pre-emptive Priority Scheduling
time

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 96
Rate-Monotonic Scheduling
• Liu and Layland [1973]: RMS = optimal fixed-priority scheduling– If a successful scheduling for the RMS cannot
be found, then no other fixed priority mechanism will avail.
• The higher the request rate, the higher the priority assigned to the process request
• As long as the processor utilisation remains BELOW a certain level RMS will assure the meeting of the deadlines of the tasks

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 97
Static RMS
• the process set is schedulable by the static rate monotonic priority assignment scheme if
u = ci . fi n (21/n - 1)u = ci . fi n (21/n - 1)n
i = 1
n max (u) 1 1 2 .83 3 .78 4 .76 5 .74 10 .72 100 .701000 .69
n max (u) 1 1 2 .83 3 .78 4 .76 5 .74 10 .72 100 .701000 .69
u: processor utilisation ci : task period fi : tasks frequencyn: number of tasks
u: processor utilisation ci : task period fi : tasks frequencyn: number of tasks

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 98
Periodic tasks: example 1Task Period ExectimeCY_1 2 s 1 sCY_2 3 s .9 s
Total 6 s 4.8 s: 80 %
CY_1: Pr: 110
CY_2: Pr: 100
CY_1: Pr: 100
CY_2: Pr: 110
runwaitidle

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 99
Periodic tasks: example 2Task Period ExectimeCY_1 2 s 1 sCY_2 3 s 1.1 s
Total 6 s 5.2 s: 87%
CY_1: Pr: 100
CY_2: Pr: 110
CY_1: Pr: 110
CY_2: Pr: 100

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 100
Periodic tasks: example 3Task Period ExectimeCY_1 2 s 1 sCY_2 3 s 1.1 s
Total 6 s 5.2 s: 87%
CY_1: Pr: 110
CY_2: Pr: 100
CY_2: Pr: 100CY_2: Pr: 120
Change priorities dynamically

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 101
Periodic + non periodic tasks
• earliest deadline (d)• least slack (minimal laxity)

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 102
Earliest Deadline• http://en.wikipedia.org/wiki/Earliest_deadline_first_schedulin
g
• the process set is schedulable on a single processor by the dynamic earliest deadline scheme if
ci . fi n
i = 1
• ci : the computation time of task i• fi : the task's frequency

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 103
Least Slack Time• http://en.wikipedia.org/wiki/Least_slack_time_scheduling
• slack (Pi , t) = max (di - ci - t , 0)
• optimal in single processor systems only

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 104
Some supplementary issues
• Queue response predictability• Cache introduces un-predictability• Hard RT today with TTP

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 105
Scheduling queues
head
tail
registers
PCB aPCB a
registers
PCB bPCB b
readyqueue
queue header
For predictability: thread switch time should be independent of the number of threads waiting in the
queue.
Always order queue when a thread goes into it! High priority thread goes in top of it.

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 106
Cache???
• RMA is based on the availability of a fixed processor performance capability
• Cache, pipelining & other mechanism provides us with a variable performance engine. They give an AVERAGE enhancement of processor performanceToday - there is no real solution how to deal with this!

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 107
TTA & TTP
• Time Triggered Architecture• Time Triggered Protocol• Time Triggered OS
– OSEK– OSEKtime
• http://www.ttagroup.org/• http://www.tttech.com

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 108

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 109

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 110
Good RTOS – REQ:have enough thread
priority levels
A good RTOS needs enough thread priority levels (> 128) so that the
application of RMA or similar theories is easy.
A good RTOS needs enough thread priority levels (> 128) so that the
application of RMA or similar theories is easy.

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 111
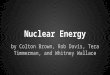
NT priority levels
Not enoughLevels for a serious real-time design!
Not enoughLevels for a serious real-time design!

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 112
CE 2.0 Fixed Priority levels
•0-1 (interrupt level)– real-time processing and device drivers–0: time-critical - no time slicing
•2-4 (main level)–normal applications
•5-7 (idle level)–non RT threads–pre-emption available
•same priority level: round-robin
Not enough levels for a serious real-time design!
Not enough levels for a serious real-time design!

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 113
CE 3.0 Fixed Priority levels
•0-246 (real-time priority interrupt level)
•247-255 (system level)•same priority level: round-robin

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 114
QNX
• 32 levels• May be just enough!?

Dedicated Systems Experts 2005 - Martin TIMMERMAN p. 115
End of Scheduling

Dedicated Systems Experts 2005 - Martin TIMMERMAN p. 116
Module 2 d:Memory management

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 117
M2d: Storage management
As some people use non-RT systems for embedded applications, we are obliged to study both GPOS and RTOS memory management techniques.
• Memory Management (Real storage)• Virtual Memory (Virtual storage)• Storage in RT-Systems

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 118
MEMORY MANAGEMENT
• Background• Swapping• Single-Partition Allocation• Multiple-Partition Allocation• Multiple Base Registers• Paging• Segmentation• Paged Segmentation

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 119
Memory Management: intro
• multiple processes: share memory• different ways of managing memory
– primitive bare machine– paging– segmentation
• selection of memory management = hardware design issue

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 120
Background
• Memory is central to the operation of a modern computer system
• In this section we may ignore HOW a memory address is generated by a program via the CPU or any other device
• We are only interested in the sequence of memory addresses generated by the running program
• In a first approach: the whole program in memory to be able to run

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 121
Background
• Address Binding• Dynamic Loading• Dynamic Linking• Overlays

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 122
B: Address Binding 1
sourceprogram
sourceprogram
objectmodule
objectmodule
compiler orassembler
compiler orassembler
compile time

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 123
B: Address Binding 2
objectmodule
objectmodule
loadmodule
loadmodule
linkageeditor
linkageeditor
load time
otherobjectmodule
otherobjectmodule

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 124
B: Address Binding 3
loadmodule
loadmodule
inmemory
inmemoryloaderloader
execution time(run time)
load time
systemlibrary
systemlibrary
dynamicallyloaded system
library
dynamicallyloaded system
library

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 125
Address Binding during development
sourceprogram
sourceprogram
objectmodule
objectmodule
compiler orassembler
compiler orassembler
other objectmodule
other objectmodule
loadmodule
loadmodule
linkageeditor
linkageeditor
objectlibrarymodule
objectlibrarymodule
inmemory
inmemory
loaderloader
systemlibrary
systemlibrary
dynamicallyloaded system
library
dynamicallyloaded system
library
residentsystemlibrary
residentsystemlibrary

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 126
Dynamic loading
• loading a routine when needed• routines are kept on disk• advantages:
– unused routines are never loaded– no special support from OS
• examples: error routines
NON-RT

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 127
Dynamic linking
• example: having the library loaded in memory all the time
• advantage:– memory usage– easy replacement of library by new one
(with less bugs)
• other name: shared libraries
RT-OK

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 128
Overlays
• problem: limitation of program size (historical issue)
symboltable
commonroutines
overlaydriver
pass 2pass 1
20K
30K
10K 80K70K
NON-RT

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 129
Swapping
• swapping out to a backing store
operatingsystem
userspace
processP1
processP2
swap out
swap in
NON-RT

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 130
Swapping
• swapping back to the same place or not depending on the address binding
• backing store is fast disk• context switch time may be very high if
swapping is needed• problem: swapping a process with pending
I/O– solution 1: wait for I/O completion– solution 2: I/O via OS buffers
• today swapping is only used in very few systems
NON-RT

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 131
Single-partition-allocation 1• simple memory management = NONE
– user has complete control over entire memory• advantages:
– maximum flexibility to the user– maximum simplicity and minimum cost– no need for special hardware– no real need for OS software
• limitations– no service– OS has no control over interrupts– no mechanism to process system calls or
errors– no space for multi-programming
RT-OK

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 132
Single-partition allocation 2
• divide memory in 2 partitions– one for the user– one for the OS (if used) OS
user
0
512K RT-OK

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 133
SPA: memory protection
CPUCPU >=>= <<
basebase base + limitbase + limit
memorymemory
trap to OS monitor - addressing error
address yes yes
no no
RT-OK

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 134
SPA: loading problem
• user program does not start at 0• what if OS uses transient code
– OS code size changes during execution– Transient code is not anymore needed
with modern processors

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 135
SPA: loading - solution 1
• process loaded in high memory
operatingsystem
user
0
512K

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 136
SPA: loading - solution 2
• dynamic relocation:
• user thinks the process runs in location 0
CPUCPU++
1400014000
base register
memorymemorylogical
addressphysicaladdress
346 14346
RT-OK

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 137
Multiple-Partition-Allocation
• multi-programming• fixed-sized partitions
– example: IBM OS/360operatingsystem
2160K
2560K
400K
0
Job Queue
Process memory TimeP1 600K 10P2 1000K 5P3 300K 20P4 700K 8P5 500K 15
Job Queue
Process memory TimeP1 600K 10P2 1000K 5P3 300K 20P4 700K 8P5 500K 15

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 138
P1
P2
P3
P4
P5

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 139
operatingsystem
P5
P4
P3
2560K
2300K
2000K
1700K
1000K
900K
400K
0
operatingsystem
P1
P4
P3
2560K
2300K
2000K
1700K
1000K
400K
0
operatingsystem
P1
P3
2560K
2300K
2000K
1000K
400K
0
operatingsystem
P1
P2
P3
2560K
2300K
2000K
1000K
400K
0
operatingsystem
P4
P3
2560K
2300K
2000K
1700K
1000K
400K
0
External fragmentation & compaction

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 140
MPA: dynamic storage allocation
• First-fit– first hole that is big enough
• Best-fit– smallest hole that is big enough
• Worst-fit– largest hole

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 141
MPA: external fragmentation
• enough space is left but is not contiguous
• one third of memory may be unusable
EXTERNAL FRAGMENTATION

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 142
MPA: memory protection
CPUCPU << ++
limitlimit base base
memorymemory
trap to OS monitor - addressing error
logicaladdress yes
no
RT-OK

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 143
MPA: internal fragmentation
operatingsystem
P7
P43
next requestfor 17.000 bytes
hole of18.000 bytes
INTERNAL FRAGMENTATION

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 144
MPA: compaction
• shuffle all free memory together in one large block
• combine compaction with swapping to make it work
NON-RT

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 145
operatingsystem
P5
P4
P3
2560K
2300K
2000K
1700K
1000K
900K
400K
0
operatingsystem
P5
P4
P3
660K
2560K
1900K
1600K
900K
400K
0
NON-RT

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 146
operatingsystem
P1
P2
400K
2100K
1900K
1500K
1000K
600K
500K
300K
0
P3
300K
1200K
P4
operatingsystem
P1
P2
2100K
800K
600K
500K
300K
0
P3
1200K
P4
900K
moved 600K
operatingsystem
P1
P2
2100K
1000K
600K
500K
300K
0
P3
1200K
P4
900K
moved 400K
operatingsystem
P1
P2
900K
2100K
1900K
1500K
600K
500K
300K
0
P3
P4
moved 200K NON-RT

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 147
Multiple Base Registers
• problem of variable-sized partition scheme is external fragmentation
• solution: break down the memory a process needs into several parts
• multiple base registers per process must be provided to do logical to physical address translation

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 148
MBR: solution 1
• memory divided into 2 disjoint parts by using the high order address bit
• use 2 pairs of base registers• compilers and assemblers put
– read-only values in high memory– variables in low memory
• mechanism permits shared use of read-only segments

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 149
MBR: solution 2
• separate a program into 2 parts: code and data
• programs may be shared– compilers– editors– ...

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 150
PAGING
• problem: external fragmentation• solution:
– Compaction - – paging
• paging can also be used on the backing store (= virtual memory)

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 151
pp ff
Paging Hardware
CPUCPUpp dd ff dd
physicalmemory
physicalmemory
logical address physical address
012345678
012345678
abcdefghi
abcdefghi

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 152
P: hardware 2
• page size– 512 to 2048 bytes per page– depends on the number of bits of “d”– = table of base registers
page 0page 0
page 1page 1
page 2page 2
page 3page 3
page 0page 0
page 2page 2
page 1page 1
page 3page 3logical memory
physical memory
00
11
22
33
1 1
44
33
77
1
4
3
7
0
2
5
6

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 153
new processpage table
Paging mechanism
free frame list1413182015
13
14
15
16
17
18
19
20
21
new processpage 0page 1page 2page 3
free frame list15 page 1
page 0
page 2
page 3
13
14
15
16
17
18
19
20
21
new processpage 0page 1page 2page 3
0
1
2
3
14
13
18
20

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 154
P: implementation of page table
• performance issue• dedicated registers
– high speed logic– part of the context
• in main memory– via page-table base register for fast context
switch– speed reduction by 2
• special small hardware memory– called associative registers or translation look-
aside buffers (TLBs)– hit ratio problem
SLOWER-RT-OK

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 155
pp ff
CPUCPUpp dd
012345678
012345678
ff dd
physicalmemory
physicalmemory
logical address physical address
abcdefghi
abcdefghi
associative map
RT-OK

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 156
pp ff
pp ff
CPUCPUpp dd
02358
02358
ff dd
physicalmemory
physicalmemory
logical address physical address
acdfi
acdfi
associative map012345678
012345678
abcdefghi
abcdefghi
++
address ofpage table b
address ofpage table b
PT origin R
b
only if no matchin assoc. map
NON-RT ?

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 157
P: shared pages
• if code re-entrant– non self modifying code!– also called pure code
ed 1ed 1
ed 2ed 2
ed 3ed 3
data 1data 1
33
44
66
11
process P1 PT
ed 1ed 1
ed 2ed 2
ed 3ed 3
data 3data 3
33
44
66
22
process P3 PT
ed 1ed 1
ed 2ed 2
ed 3ed 3
data 2data 2
33
44
66
77
process P2 PT
data 1
data 3
ed 1
ed 2
ed 3
data 2
0
1
2
3
4
5
6
7
8

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 158
P: protection
• protection bits associated with each frame– read– write– read-only– read-write– execute only
• protection via page-table length register– limited number of pages given to a process
(not all pages are possible)– if other pages used: bus error for OS
RT-OK

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 159
P: two views of memory
• user’s view - OS view• logical - physical address• logical to physical address translation for
I/O operations
• Paging solves problem of external fragmentation but creates internal fragmentation!
• Page size is small. Many pages needed. Associated Map is limited. RT-problem

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 160
SEGMENTATION
• User’s view of memory– user does not think of memory as a
linear array
subroutinestack
mainprogram
symboltable

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 161
Segmentation 2
• segmentation supports user’s view• example: Pascal compiler
– global variables– the procedure call stack– the programs itself– the local variables of each procedure and
function
• segments are numbered• user refers to a piece of code or data via a
segment number and an offset in the segment

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 162
S: hardware
CPUCPU (s,d)
limitlimit basebase
<<++
Physical memory
Physical memory
segment table
yes
no
address error trapRT-OK

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 163
lim
1000
4001100
1000
subroutinestack
mainprogram
symboltable
segm 0
segm 3
segm 2
segm 0
segm 5
base
1400
43003200
4700
segment table
segment 0
segment 3
segment 2
segment 5
1400
012345
2400
3200
4300
4700
5700

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 164
S: implementation of segment tables
• Segment table – part of the context (will be in Task Control Block
• Context is larger – thread switching time is higher = slower RT-OK

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 165
S: protection and sharing
• protection: corresponds better to the user idea– read– write – read-only– execute only
• sharing– at the segment level: any information can be
shared if it is defined at the segment level– examples: share entire program, share a
subroutine, share a data portion

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 166
S: fragmentation
• a lot of external fragmentation– to be reduced by using smaller
segments– but then more segment table space to
be lost + performance degradation
• no internal fragmentation

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 167
Paged Segmentation
• 68000 family: flat address space– First MMU was external chip
(segmented)– Then new external chip (paged)– 68030: paged MMU inside the chip
• 8086 family: segmentation– Created problem with OS2– Todays’ solution for INTEL processors:
page the segments

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 168
VIRTUAL MEMORY
• Motivation• Demand Paging• Performance of Demand Paging• Page replacement• Page replacement algorithms• Allocation of Frames• Trashing• Other Considerations• Demand Segmentation

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 169
VM: motivation
• in previous chapter: process entirely in memory• the entire program is not always needed in
memory– error code rarely used– over consumption of memory for arrays, lists etc..– some program options are never used (by most users)
• not all the time needed in memory:– program larger than physical memory– each user takes less physical memory– less I/O to load and swap each program into memory
• overlay is not anymore needed

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 170
VM: Demand Paging
0 1 2 3
4 5 6 7
8 9 10 11
12 13 14 15
16 17 18 19
20 21 22 23
page out
page in
main memory

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 171
VM: Demand Paging 2
• hardware support– valid-invalid bit in page table

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 172
0 1 2 3
4 A5 B6 C7
D8 E9 F10 11
12 13 14 15
16 17 18 19
20 21 22 23
A
B
C
D
E
F
G
H
0
1
2
3
4
5
6
7
logical memory
A
C
0
1
2
3
4
5
6
7
8
F9
10
11
0
1
2
3
4
6
v
i
v
i
4
5
6
7
9
i
v
i
i
page table
physical memory

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 173
load M
i
OS
free frame
physical mem
page table
1: reference
2: trap
3: page is on disk
4: get missing page
5: reset page table
6: restart inst
NON-RT!!

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 174
VM: performance & demand paging
• following sequence occurs– trap to OS– save the user registers and process state– determine that the interrupt was a page fault– check that page ref was legal and locate page on disk– issue read from disk to a free frame
• wait in queue for this device until read is serviced• wait for device seek and/or latency time• begin transfer of the page to free frame
– while waiting, allocate CPU to other user (optional CPU scheduling)
– disk I/O completion– save registers and process state for the other user– determine the interrupt was from disk– correct page tables and other tables– wait for CPU to be allocated to this process again– restore user registers, process state and new page table, then
resume the interrupted instructionNON-RT

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 175
VM: page replacement
• limit the number of pages in memory for one user
• replace an old (non used) page with a new one
• Different page replacement algorithms (pm)
• problem of how many frames a process gets
• a process is trashing if it spends more time paging than executingNON-RT

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 176
VM: other considerations
• page size (hardware issue)• program structure and behaviour
under paging is NON-RT• ......

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 177
VM: Demand segmentation
• invented especially for the 80286 not including page features
• used by OS/2

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 178
Good RTOS – REQ:Predictable Mem Mgt
A good RTOS needs a predictable memory mgt system.It will therefore be as simple as possible.
No memory leaks are accepted. Garbage collection is damned.Memory protection becomes an important issue.
If virtual memory is used, firm memory locking should be possible.
A good RTOS needs a predictable memory mgt system.It will therefore be as simple as possible.
No memory leaks are accepted. Garbage collection is damned.Memory protection becomes an important issue.
If virtual memory is used, firm memory locking should be possible.

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 179
MM in RTS
• performance issue– CPU power used for MM– if MMU is used outside processor: 10%
lost– if MMU inside processor 3% lost– MMU: protection against programmer’s
errors
• predictability issue– ask for memory - when do I get it, if I get
it!

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 180
Mem Mgt Conclusions for RT
• Never usable• Not used• Sometimes used• Always used

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 181
Never use-able in RTS
• Dynamic loading of DLL.• Virtual memory on disk.• Compaction or garbage collection
due to external fragmentation.• ..

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 182
Not Used in RTS
• Dynamic relocation via an MMU• Instead good CROSS compilers are
used generating “pure code” and position independent code (PIC)
• But could be used in slower RT systems

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 183
Sometimes Used in RTS
• Protection of segments via an MMU• Use of paging MMU is difficult due to
the large number of pages involved• Used in application where security is
important– Nuclear power plant control– Telecom billing systems

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 184
Always Used in RTS
• KISS (Keep It Simple and Stupid) • Static memory allocation • Minimal Dynamic Memory Allocation
– Try to allocate fixed size areas!

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 185
Dynamic Paging & RTwithout MMU
2K 5K
5K
2K
2K
2K
2K
2K
2K
7K
7K
Pools subdivided in blocks

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 186
Naming in RTOS
PartitionsPools
Regionssubdivided in
BlocksBuffers
Segments

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 187
Dynamic paging in RTS with segmented MMU
2K 5K
5K
2K
2K
2K
2K
2K
2K
7K
7K
• use segmented MMU• group segments in pools• never render pools to the system• segment used by task should be part
of the context

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 188
Dynamic paging in RTS with paged MMU
• associative map = part of the context
• larger than 2K pages indicated• a lot of internal fragmentation• difficult to use

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 189
Take Care
• Object oriented languages are difficult to use due to the dynamic behavior of the memory scheme.
• Forget C++ and Java for HARD real-time systems (for time being?) !!!!!!Just stick to C.
• If you use a non-RT OS with virtual memory management for (soft) RT applications, don’t forget to LOCK the (soft) RT tasks in memory.

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 190
Memory Leaks
• Some OS do not release all memory.• Garbage is building up – you need to
restart the system in order to “clean memory”

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 191
Good RTOS – REQ:known memory footprint
The memory footprint should be knowfor different configurations.
The memory footprint should be knowfor different configurations.

Dedicated Systems Experts – 2005 – Martin TIMMERMAN p. 192
CE Memory Footprint
• Minimum:– low end system
• kernel + communications + stacks - no display + application
– 500 KB ROM - 350 KB RAM
• Typical footprint– Handheld PC– 2 MB ROM - 512 KB RAM

Dedicated Systems Experts 2005 - Martin TIMMERMAN p. 193
End ofRTOS Memory management

Dedicated Systems Experts 2005 - Martin TIMMERMAN p. 194
Module 2 Conclusions