-
7/30/2019 Day 2 AM Interrupts
1/12
20-Aug-2010 Paranz 1
Introduction to PICMicrocontroller Programming
& Interfacing
August 19-21, 2010Franz Duran
20-Aug-2010 Paranz 2
Interrupts
DAY 2 Morning Session
August 20, 2010
20-Aug-2010 Paranz 3
OVERVIEW
Interrupt BasicsInterrupt sources
Interrupt service routine (ISR)
Interrupts in PIC16F84A, PIC16F877A
Associated SFRs
RB0 Interrupt
PORTB Interrupt on-change
-
7/30/2019 Day 2 AM Interrupts
2/12
20-Aug-2010 Paranz 4
BASICS OF INTERRUPTS
Very important microcontroller featureAllows internal &
external events to
trigger an interruptnotify the CPU
CPU temporarily halt program
execution and respond to the interruptExecute an interrupt
service routine
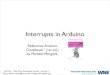
20-Aug-2010 Paranz 5
BASICS OF INTERRUPTS
void main()
{
InitializeSystem();
while(1)
{
Task1();
Task2();
Task3();
Task4();
Task5();
}
}
void interrupt isr(void)
{
//Execute relevant instructions.
//Clear interrupt flag.
}
an interrupt is tri ggered
- CPU saves context (Program Counter, STATUS, W)
CPU exits from interrupt
service routine; previouscontext is restored, continue
program execution.
CPU executes theinterrupt service routine
20-Aug-2010 Paranz 6
INTERRUPTS: PIC16F84A
4 Interrupt sourcesRB0 interrupt
PORTB-on-change interruptTMR0 interrupt
Data EEPROM Write Complete Interrupt
SFR: INTCON
-
7/30/2019 Day 2 AM Interrupts
3/12
20-Aug-2010 Paranz 7
INTERRUPTS: PIC16F877A
15 interrupt sourcesRB0 interrupt
PORTB-on-change interrupt
TMR0 interrupt
Data EEPROMWrite Complete Interrupt
UART TX, UART RX
ADC, TMR1, TMR2
SSP, CCP, etc..
SFRs: INTCON, PIR1, PIR2, PIE1, PIE2
20-Aug-2010 Paranz 8
INTERRUPTS: INTCON
PIC16F84A
PIC16F877A
20-Aug-2010 Paranz 9
INTERRUPTS: PIC16F84A
Interrupt Logic
-
7/30/2019 Day 2 AM Interrupts
4/12
20-Aug-2010 Paranz 10
INTERRUPTS: PIC16F877A
Interrupt Logic
20-Aug-2010 Paranz 11
RB0/INT INTERRUPT
RB0 pin is an interrupt source
Generate an interrupt on the ff. event:falling-edge signal
transition
+5v 0v
rising-edge signal transition
0v +5v
20-Aug-2010 Paranz 12
RB0/INT INTERRUPT
1 interrupt on rising edge
0 interrupt on falling edge
Set automatically by hardwareon interrupt; cleared via
software
Set to enableRB0/INT interrupt
Set to enable interrupt
-
7/30/2019 Day 2 AM Interrupts
5/12
20-Aug-2010 Paranz 13
RB0/INT INTERRUPT
1
1
01
ISR is executed
20-Aug-2010 Paranz 14
RB0/INT INTERRUPT#include
__CONFIG(HS & WDTDIS & LVPDIS & PWRTDIS &
UNPROTECT);
void main()
{
//Button at RB0.
INTEDG = 0; //Interrupt on falling edge.
INTF = 0; //Clear RB0 interrupt flag.
INTE = 1; //Enable RB0 interrupt.
GIE = 1; //Enable interrupt.
TRISC1 = 0; //LED at RC1
RC1 = 0;
while(1); //Do nothing but wait for RB0 interrupt,
// to occur then execute the ISR.
}
Example#1
20-Aug-2010 Paranz 15
RB0/INT INTERRUPT
//Interrupt Service Routine
void interrupt isr_RB0(void)
{
RC1 = 1; //Toggle LED.INTF = 0; //Clear RB0 interrupt flag.
}
Example#1
-
7/30/2019 Day 2 AM Interrupts
6/12
20-Aug-2010 Paranz 16
RB0/INT INTERRUPTEXERCISE:
Change to INTEDG=1 rising edge
Observe behaviour
20-Aug-2010 Paranz 17
RB0/INT INTERRUPT
EXERCISE:Modify Example#1
Toggle another LED in program loopLED1 toggled when RB0/INT
triggers
LED2 blink in program loop
toggle LED2 every 500 msec
use delay.c and delay.h
Example#2
20-Aug-2010 Paranz 18
BASICS OF INTERRUPTS
Other interrupt INFOs:GIE is automatically cleared during
ISR
execution; GIE is set on ISR exit
prevent the ISR from being interrupted
Interrupt latency time between interrupt & execution of
ISR
CPU complete current instruction, do context save
3-4 instruction cycles for external interrupts
2-3 instruction cycles for internal interrupts
-
7/30/2019 Day 2 AM Interrupts
7/12
20-Aug-2010 Paranz 19
BASICS OF INTERRUPTS
other INFOs: (cont)ISR should be as short as possible set event
flags inside the ISR &
do associated tasks in program loop
20-Aug-2010 Paranz 20
RB0/INT INTERRUPT#include
__CONFIG(HS & WDTDIS & PWRTDIS & UNPROTECT &
LVPDIS);
#define LED RC1
#define TRUE 1
#define FALSE 0
#define TOGGLE 1
volatile bit rb0_int_flag = FALSE; //event flag variable
void interrupt ISR(void)
{
rb0_int_flag = TRUE;
INTF = 0; //clear RB0 interrupt flag
}
Example#3
20-Aug-2010 Paranz 21
RB0/INT INTERRUPT
void main()
{
InitSystem();
while(1){
if(rb0_int_flag == TRUE) //Poll flag.
{
rb0_int_flag = FALSE; //Clear flag.
LED = 1; //Do task.
}
}
}
Example#3
-
7/30/2019 Day 2 AM Interrupts
8/12
20-Aug-2010 Paranz 22
BASICS OF INTERRUPTS
other INFOs: (cont)ISR should be as short as possible set event
flags inside the ISR &
do associated task in program loop
Global variables modified inside the ISR AND
program loop should be declared asvolatile
20-Aug-2010 Paranz 23
BASICS OF INTERRUPTS
volatile keyword
Variable type qualifier
inform the compiler that the value of a
variable may be modified by the hardware inways that are not
explicitly specified duringnormal program operation.
Compiler should not optimize the variable inmain (or in other
functions)
20-Aug-2010 Paranz 24
RB0/INT INTERRUPT#include
void main()
{
INTEDG = 0; //Falling edge
INTF = 0; //Clear RB0 interrupt flag.
INTE = 0; //Disable RB0 interrupt.
GIE = 0; //Disable all interrupt.
TRISC1 = 0; //LED
RC1 = 0;
while(1)
{
if(INTF==1) //poll INTF if it is set
{
RC1 = 1; // then toggle LED.
INTF = 0; //Clear RB0 interrupt flag.
}
}
}
Example#4
-
7/30/2019 Day 2 AM Interrupts
9/12
20-Aug-2010 Paranz 25
PORTB INTERRUPT ON CHANGE
PORTB pins can be configuredas an interrupt source
Generate an interrupt
when the logic signal
level on any pin
changes
20-Aug-2010 Paranz 26
PORTB INTERRUPT ON CHANGE
Generate an interrupt on both risingedgeand falling edge
Operation:old value of PORTB during last read is
stored
if current value not equal to old value,
mismatch condition
RBIF=1
20-Aug-2010 Paranz 27
PORTB INTERRUPT ON CHANGE
1
1
01ISR is executed
-
7/30/2019 Day 2 AM Interrupts
10/12
20-Aug-2010 Paranz 28
PORTB INTERRUPT ON CHANGE
To clear PORTB interrupt:read value of PORTB AND
clear RBIF
20-Aug-2010 Paranz 29
PORTB INTERRUPT ON CHANGE
Set by hardware automaticallyon interrupt; cleared via
software
Set to enablePORTB interrupt
Set to enableinterrupt
20-Aug-2010 Paranz 30
PORTB INTERRUPT ON CHANGE#include
void interrupt isr(void)
{
unsigned char portb_temp;
RC1 = 1; //Toggle LED
portb_temp = PORTB & 0xF0; //Read to clear mismatch
RBIF = 0; //Clear interrupt flag
}
void main()
{
TRISB = 0b00010000; //RB4 is input, rest are output &
unused.
RBIF = 0; //Clear interrupt flag.
RBIE = 1; //Enable interrupt.
GIE = 1; //Enable all (global) interrupt.
TRISC1 = 0; //LED
RC1 = 0;
while(1); //do nothing, simply wait for ISR
}
The ISR is
executed twice
during a buttonpress
Example#5
-
7/30/2019 Day 2 AM Interrupts
11/12
20-Aug-2010 Paranz 31
PORTB INTERRUPT ON CHANGE If using multiple PORTB pins, use
switch() and masks
Example: RB4 and RB5 are interrupt source
void interrupt isr(void)
{
unsigned char portb_temp;
portb_temp = PORTB & 0b00110000; //read PORTB
switch(portb_temp)
{
case 0b00100000: //if Pushbutton1 is pressed,
LED1 = TOGGLE; //toggle LED1
break;
case 0b00010000: //if Pushbutton2 is pressed,
LED2 ^= TOGGLE; //toggle LED2
break;
}
RBIF = 0; //clear interrupt flag
}
20-Aug-2010 Paranz 32
Multiple Interrupts
PIC16F has several interrupts
But only one ISR
If using multiple interrupts:Poll the interrupt enable bit and
interrupt flag
bit
Example: RB0 int & PORTB Int.Poll INTE and INTF
Poll RBIE and RBIF
20-Aug-2010 Paranz 33
Multiple Interruptsvoid interrupt isr(void)
{
unsigned char portb_temp;
//Check if PORTB Int. triggered the interrupt
if(RBIE && RBIF)
{
//codes here
RBIF = 0; //clear interrupt flag
}
//Check if RB0 triggered the interrupt
if(INTE && INTF)
{
//codes here
INTF = 0; //clear interrupt flag
}
}
-
7/30/2019 Day 2 AM Interrupts
12/12
20-Aug-2010 Paranz 34
Multiple Interrupts
EXERCISE: using multiple interruptsToggle LED1 with RB0
interrupt
Toggle LED2 and LED3 with PORTB interrupt
Toggle LED2 with RB4
Toggle LED3 with RB5
20-Aug-2010 Paranz 35
BASICS OF INTERRUPTS
other INFOs: (cont)ISR should be as short as possible
Global variables modified inside the ISR AND
program loop should be declared asvolatile
interrupt flags are set even if interrupt isdisabled INTF is set
by hardware, even if INTE=0 & GIE=0
20-Aug-2010 Paranz 36
INTERRUPTS: Summary
Interrupts expands MCU functionality
Main benefit:speed of response to internal/external events max.
4 TOSC interrupt latency
reduced software overhead
program efficiency greatly increased
facilitates multitasking