-
7/26/2019 8 Interrupts
1/51
Interrupts
-
7/26/2019 8 Interrupts
2/51
Interrupts
Interrupt is a process where an external device can getthe
attention of the microprocessor. The process startsfrom the I/O
device
The process is asynchronous.
Interrupts can be classified into two types: as!able"can be
delayed#
$on%as!able"can not be delayed#
Interrupts can also be classified into: &ectored"the address
of the service routine is hard%wired#
$on%vectored"the address of the service routine needs to be
suppliedexternally#
-
7/26/2019 8 Interrupts
3/51
-
7/26/2019 8 Interrupts
4/51
,esponding to Interrupts
,esponding to an interrupt may be immediateordelayeddepending on
whether the interrupt is mas!ableor non%mas!able and whether
interrupts are being
mas!ed or not.
There are two ways of redirecting the execution to theI+,
depending on whether the interrupt is vectored or
non%vectored. The vector is already !nownto the
icroprocessor
The device will have to supplythe vector to theicroprocessor
-
7/26/2019 8 Interrupts
5/51
-
7/26/2019 8 Interrupts
6/51
The 0 Interrupts
The 0 has 0 interrupt inputs. The I$T, input.
The I$T, input is the only non%vectoredinterrupt.
I$T, is mas!ableusing the -I/3I instruction pair.
,+T 0.0) ,+T 4.0) ,+T 5.0 are all automaticallyvectored.
,+T 0.0) ,+T 4.0) and ,+T 5.0 are all mas!able.
T,'6 is the only non%mas!ableinterrupt in the 0 T,'6 is also
automatically vectored
-
7/26/2019 8 Interrupts
7/51
The 0 Interrupts
Interrupt name as!able &ectored
I$T, 7es $o
,+T 0.0 7es 7es
,+T 4.0 7es 7es
,+T 5.0 7es 7es
T,'6 $o 7es
-
7/26/2019 8 Interrupts
8/51
Interrupt &ectors and the &ector
Table 'n interrupt vectoris a pointer to where the I+, is
stored in memory.
'll interrupts "vectored or otherwise# are mapped ontoa memory
area called the Interrupt &ector Table"I&T#. The I&T is
usually located in memory page "8 %
998#.
The purpose of the I&T is to hold the vectors that
redirect
the microprocessor to the right place when an
interruptarrives.
The I&T is divided into several bloc!s. -ach bloc! is usedby
one of the interrupts to hold its 1vector2
-
7/26/2019 8 Interrupts
9/51
. The interrupt process should be enabledusing the
-Iinstruction.
;. The 0 chec!s for an interrupt during the execution
ofeveryinstruction.
-
7/26/2019 8 Interrupts
10/51
4. (hen the microprocessor executes the ,+T instructionreceived
from the device) it saves the address of the nextinstructionon the
stac! and *umps to the appropriate
entry in the I&T.5. The I&T entry must redirect the
microprocessor to the
actual service routine.
. The service routine must include the instruction -Ito re%
enable the interrupt process.@. 't the end of the service
routine) the ,-Tinstruction
returns the execution to where the program wasinterrupted.
The 0 $on%&ectored Interrupt
6rocess
-
7/26/2019 8 Interrupts
11/51
The 0 $on%&ectored Interrupt 6rocess
The 0 recogniAes ,-+T',T
instructions: ,+T % ,+T5.
each of these would send theexecution to a predetermined
hard%wired memory location:
RestartInstruction
Equivalentto
,+T B'CC8
,+T B'CC8
,+T; B'CC8
,+T< B'CC8
,+T> B'CC;8
,+T0 B'CC;8
,+T4 B'CC
-
7/26/2019 8 Interrupts
12/51
,estart +e=uence
The restart se=uence is made up of three machinecycles
In the st machine cycle: The microprocessor sends the I$T'
signal. (hile I$T' is active the microprocessor reads the data
lines
expecting to receive) from the interrupting device) the
opcodefor the specific ,+T instruction.
In the ;nd and
-
7/26/2019 8 Interrupts
13/51
,estart +e=uence
The location in the I&T associated with the
,+T instruction can not hold the complete
service routine.The routine is written somewhere else in
memory.
Only a D?6 instruction to the I+,Es locationis !ept in the
I&T bloc!.
-
7/26/2019 8 Interrupts
14/51
8ardware Feneration of ,+T
Opcode 8ow does the external device produce the
opcode for the appropriate ,+T instructionG
The opcode is simply a collection of bits.
+o) the device needs to set the bits of the data
bus to the appropriate value in response to an
I$T' signal.
-
7/26/2019 8 Interrupts
15/51
The following is anexample of generating
RST 5:
RST 5s opcode is EF =
D D
765!"#$
###$####
8ardware Feneration of ,+T
Opcode
-
7/26/2019 8 Interrupts
16/51
8ardware Feneration of ,+T
Opcode 3uring the interrupt ac!nowledge machine cycle)
"the st machine cycle of the ,+T operation#:
The icroprocessor activates the I$T' signal. This signal will
enable the Tri%state buffers) which willplace the value -98 on the
data bus.
Therefore) sending the icroprocessor the ,+T 0instruction.
The ,+T 0 instruction is exactly e=uivalent toB'CC ;8
-
7/26/2019 8 Interrupts
17/51
-
7/26/2019 8 Interrupts
18/51
Issues in Implementing I$T,
Interrupts 8ow long canthe I$T, remain highG
The I$T, line must be deactivated before the -I is
executed.Otherwise) the microprocessor will be interrupted
again.
The worst case situation is when -I is the first instruction
inthe I+,.
Once the microprocessor starts to respond to an I$T,interrupt)
I$T' becomes active "H#.
Therefore)I$T, should be turned off as soon as theI$T' signal is
received.
-
7/26/2019 8 Interrupts
19/51
Issues in Implementing I$T,
Interrupts Banthe microprocessor be interrupted again before
the
completion of the I+,G 's soon as the st interrupt arrives) all
mas!able interrupts are
disabled. They will only be enabled after the execution of the
-I
instruction.
Therefore) the answer is: 1only if you allow it to2.
If the -I instruction is placed early in the I+,) otherinterrupt
may occur before the I+, is done.
-
7/26/2019 8 Interrupts
20/51
ultiple Interrupts 6riorities
8ow do we allow multiple devices tointerrupt using the I$T,
lineG
The microprocessor can only respond to onesignal on I$T, at a
time.
Therefore) we must allow the signal from onlyone of the devices
to reach the microprocessor.
(e must assign some priority to the differentdevices and allow
their signals to reach themicroprocessor according to the
priority.
-
7/26/2019 8 Interrupts
21/51
The 6riority -ncoder
The solution is to use a circuit called the priority
encoder"5> in the boo! shoes how this circuit can be used witha
Tri%state buffer to implement an interrupt priority scheme.
The figure in the textboo! does not show the method for
distributing theI$T' signal bac! to the individual devices.
-
7/26/2019 8 Interrupts
22/51
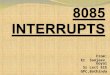
ultiple Interrupts 6riorities
$ote that the opcodes for the different ,+Tinstructions follow a
set pattern.
Jit 30) 3> and 3< of the opcodes change in a binary
se=uence
from ,+T 5 down to ,+T . The other bits are always .
This allows the code generated by the 5>
-
7/26/2019 8 Interrupts
23/51
ultiple Interrupts and 6riority
De%& 7
De%& 6
De%& 5
De%&
De%& !
De%& "
De%& #
De%& $
7
#
!
'
7
!6
6
'
$
'5
()TR *irc+it
()T, *irc+it
()T,
()TR
,D7
,D6
,D5
,D
,D!
,D"
,D#,D$
-7-6-5--!-"-#-$
(7(6(5(
(!("(#($
Tri .
State
/+ffer0riorit1
Encoder
25 3
RST *irc+it
-
7/26/2019 8 Interrupts
24/51
The 0 as!able/&ectored
Interrupts The 0 has > as!ed/&ectored interrupt
inputs.
,+T 0.0) ,+T 4.0) ,+T 5.0 They are all mas!able.
They are automatically vectoredaccording to the following
table:
The vectors for these interrupt fall in between the vectors for
the,+T instructions. ThatEs why they have names li!e ,+T 0.0 ",+T
0and a half#.
Interrupt Vector
,+T 0.0 ;B8
,+T 4.0 8
,+T 5.0
-
7/26/2019 8 Interrupts
25/51
as!ing ,+T 0.0) ,+T 4.0 and
,+T 5.0 These three interrupts are mas!ed at two
levels:
Through the Interrupt -nable flip flop and the-I/3I
instructions.
The Interrupt -nable flip flop controls the wholemas!able
interrupt process.
Through individual mas! flip flops that controlthe availability
of the individual interrupts.
These flip flops control the interrupts individually.
-
7/26/2019 8 Interrupts
26/51
-
7/26/2019 8 Interrupts
27/51
The 0 as!able/&ectored
Interrupt 6rocess. The interrupt process should be enabledusing
the -I
instruction.
;. The 0 chec!s for an interrupt during the execution of
everyinstruction.
. The microprocessor then executes a call instruction that
sends the execution to the appropriatelocation in theinterrupt
vector table.
-
7/26/2019 8 Interrupts
28/51
The 0 as!able/&ectored
Interrupt 6rocess0. (hen the microprocessor executes the
call
instruction) it saves the address of the nextinstructionon the
stac!.
4. The microprocessor*umps to the specific serviceroutine.
5. The service routine must include the instruction -Ito
re%enable the interrupt process.
. 't the end of the service routine) the ,-Tinstruction returns
the execution to where the
program was interrupted.
-
7/26/2019 8 Interrupts
29/51
anipulating the as!s
The Interrupt -nable flip flop is manipulated using
the -I/3I instructions.
The individual mas!sfor ,+T 0.0) ,+T 4.0 and
,+T 5.0 are manipulated using the +I
instruction.
This instruction ta!es the bit pattern in the 'ccumulator
and applies it to the interrupt mas! enabling and
disabling the specific interrupts.
8ow +I Interprets the
-
7/26/2019 8 Interrupts
30/51
8ow +I Interprets the
'ccumulator
SD-
SDE
R7&5
SE
7&5
6&5
5&5
$#"!567
RST5&5 as
RST6&5 as
RST7&5 as8 $ 9 ,%aila4le# 9 ased
as Set Ena4le
$ 9 (gnore 4its $9"
# 9 Set the mass according
to 4its $9"
Force RST7&5 Flip Flop to reset)ot sed
Ena4le Serial Data
$ 9 (gnore 4it 7
# 9 Send 4it 7 to S-D pin
Serial Data -+t
-
7/26/2019 8 Interrupts
31/51
+I and the Interrupt as!
Jit is the mas!for ,+T 0.0) bit is the mas!for ,+T 4.0 andbit ;
is the mas!for ,+T 5.0. If the mas! bit is ) the interrupt is
available.
If the mas! bit is ) the interrupt is mas!ed.
Jit < "as! +et -nable % +-# is an enable for setting themas!.
If it is set to the mas! is ignoredand the old settings remain.
If it is set to ) the new setting are applied.
The +I instruction is used for multiple purposes and not only
for settinginterrupt mas!s.
It is also used to control functionality such as Serial Data
Transmission. Therefore, bit 3 is necessary to tell the
microprocessor hether or not theinterrupt mas!s should be
modified
-
7/26/2019 8 Interrupts
32/51
+I and the Interrupt as!
The ,+T 5.0 interrupt is the only0 interrupt that hasmemory. If
a signal on ,+T5.0 arrives while it is mas!ed) a flip flop will
remember the signal. (hen ,+T5.0 is unmas!ed) the microprocessor
will be interrupted
even if the device has removed the interrupt signal.
This flip flop will be automatically resetwhen the
microprocessorresponds to an ,+T 5.0 interrupt.
Jit > of the accumulator in the +I instruction
allowsexplicitlyresettingthe ,+T 5.0 memory even if
themicroprocessor did not respond to it.
-
7/26/2019 8 Interrupts
33/51
+I and the Interrupt as! The +I instruction can also be used to
perform serial data
transmission out of the 0Es +O3 pin. One bit at a time can be
sent out serially over the +O3 pin.
Jit 4 is used to tell the microprocessor whether or not
toperform serial data transmission
If ) then do not perform serial data transmission If ) then
do.
The value to be sent out on +O3 has to be placed in bit 5 of
theaccumulator.
Jit 0 is not used by the +I instruction
? i the +I I t ti t dif the
-
7/26/2019 8 Interrupts
34/51
?sing the +I Instruction to odify the
Interrupt as!s -xample: +et the interrupt mas!s so that
,+T0.0 is enabled) ,+T4.0 is mas!ed) and
,+T5.0 is enabled.
9irst) determine the contents of the accumulator
SD-
SDE
R7&5
SE
7&5
6&5
5&59 Ena4le 5&5 4it $ = $
9 Disa4le 6&5 4it # = #
9 Ena4le 7&5 4it " = $
9 ,llow setting the mass 4it ! = #
9 Dont reset the flip flop 4it = $
9 /it 5 is not +sed 4it 5 = $
9 Dont +se serial data 4it 6 = $
9 Serial data is ignored 4it 7 = $
$ # $$$$$ #
*ontents of acc+m+lator are: $,;
E( < Ena4le interr+pts incl+ding ()TR
3( , $, < 0repare the mas to ena4le RST 7&5 and 5&5
disa4le 6&5
S( < ,ppl1 the settings RST mass
-
7/26/2019 8 Interrupts
35/51
Triggering Cevels
,+T 5.0 ispositive edge sensitive. (hen a positive edge appears
on the ,+T5.0 line) a logic is
storedin the flip%flop as a 1pending2 interrupt.
+ince the value has been stored in the flip flop) the line does
nothave to be highwhen the microprocessor chec!s for the
interruptto be recogniAed.
The line must go to Aero and bac! to onebefore a new interruptis
recogniAed.
,+T 4.0 and ,+T 0.0 are level sensitive. The interrupting signal
must remain present until the
microprocessor chec!s for interrupts.
3etermining the Burrent as!
-
7/26/2019 8 Interrupts
36/51
3etermining the Burrent as!
+ettings
,I instruction: ,ead Interrupt as!Coad the accumulatorwith an
%bit pattern
showing the status of each interrupt pin and
mas!.
(nterr+pt Ena4le
Flip Flop
RST 5&5
RST 6&5
RST 7&5
5&5
6&5
7&5
RST7&5 emor1
SD(
07&5
06&5
05&5(E
7&5
6&5
5&5
$#"!567
-
7/26/2019 8 Interrupts
37/51
8ow ,I sets the 'ccumulatorEs
different bits
SD(
07&5
06&5
05&5(E
7&5
6&5
5&5
$#"!567
RST5&5 as
RST6&5 asRST7&5 as 8
$ 9 ,%aila4le
# 9 ased
(nterr+pt Ena4le
3al+e of the (nterr+pt Ena4le
Flip Flop
Serial Data (n
RST5&5 (nterr+pt 0ending
RST6&5 (nterr+pt 0ending
RST7&5 (nterr+pt 0ending
-
7/26/2019 8 Interrupts
38/51
The ,I Instruction and the
as!s Jits %; show the current setting of the mas!for
each of ,+T 5.0) ,+T 4.0 and ,+T 0.0 They return the contents of
the three mas! flip flops.
They can be used by a program to read the mas! settings inorder
to modify only the right mas!.
Jit < shows whether the mas!able interrupt
process is enabled or not. It returns the contents of the
Interrupt -nable 9lip 9lop.
It can be used by a program to determine whether or
notinterrupts are enabled.
-
7/26/2019 8 Interrupts
39/51
The ,I Instruction and the
as!s Jits >%4 show whether or not there arepending
interruptson ,+T 5.0) ,+T 4.0) and ,+T 0.0 Jits > and 0
return the current value of the ,+T0.0 and
,+T4.0pins.
Jit 4 returns the current value of the ,+T5.0 memory flip
flop.
Jit 5 is used for +erial 3ata Input. The ,I instruction reads
the value of the +I3 pinon the
microprocessor and returns it in this bit.
-
7/26/2019 8 Interrupts
40/51
6ending Interrupts
+ince the 0 has five interrupt lines) interrupts
may occur during an I+, and remain pending.
?sing the ,Iinstruction) the programmer can readthe status of
the interrupt lines and find if there are any
pending interrupts.
The advantage is being able to find about interrupts on,+T 5.0)
,+T 4.0) and ,+T 0.0 without having to
enable low level interrupts li!e I$T,.
-
7/26/2019 8 Interrupts
41/51
?sing ,I and +I to set
Individualas!s -xample: +et the mas! to enable ,+T4.0
without
modifying the mas!s for ,+T0.0 and ,+T5.0. In order to do this
correctly) we need to use the ,I
instruction to find the current settings of the ,+T0.0and ,+T5.0
mas!s.
Then we can use the +I instruction to set the mas!susing this
information.
Fiven that both ,I and +I use the 'ccumulator) wecan use some
logical operations to mas!s the un%neededvalues returned by ,I and
turn them into the valuesneeded by +I.
?sing ,I and +I to set
-
7/26/2019 8 Interrupts
42/51
SD-
SDE
R7&5
SE
7&5
6&5
5&5
$ $ $$$$$ #
?sing ,I and +I to set
Individualas!s 'ssume the ,+T0.0 and ,+T5.0 are enabled and the
interrupt process is
disabled.
,I K ,ead the current settings.
O,I 8 K
K +et bit > for +-.
'$I 38 K
K Turn off +erial 3ata) 3onEt reset
K ,+T5.0 flip flop) and set the mas!
K for ,+T4.0 off. 3onEt cares are
K assumed to be .
+I K 'pply the settings.
,cc+m+lator
SD(
07&5
06&5
05&5
(E7&5
6&5
5&5
$ # $$$$$ $
$ # $$$$$ #
$ $ $$$$$ #
-
7/26/2019 8 Interrupts
43/51
T,'6
T,'6 is the only non%mas!ableinterrupt. It does not need to be
enabled because it cannot be disabled.
It has the highest priorityamongst interrupts.
It is edge and level sensitive. It needs to be high and stay
high to be recogniAed.
Once it is recogniAed) it wonEt be recogniAed again until itgoes
low) then high again.
T,'6 is usually used for power failure andemergency shutoff.
-
7/26/2019 8 Interrupts
44/51
Internal Interrupt 6riority
Internally) the 0 implements an interruptpriority scheme. The
interrupts are ordered as follows:
T,'6
,+T 5.0
,+T 4.0
,+T 0.0
I$T,
8owever) T,'6 has lower priority than the 8C3 signalused for
3'.
-
7/26/2019 8 Interrupts
45/51
The 0 Interrupts
Interrupt$ame
as!ableas!ingethod
&ectored emoryTriggering ethod
I$T, 7es 3I / -I $o $oCevel
+ensitive
,+T 0.0 /,+T 4.0
7es3I / -I
+I7es $o
Cevel+ensitive
,+T 5.0 7es3I / -I
+I
7es 7es-dge
+ensitive
T,'6 $o $one 7es $oCevel
-dge+ensitive
-
7/26/2019 8 Interrupts
46/51
'dditional Boncepts and
6rocesses 6rogrammable Interrupt Bontroller ;0@ '
' programmable interrupt managing device
It manages interrupt re=uests. It can vector an interrupt
anywherein memory
without additional 8/(.
It can support levelsof interruptpriorities.
The priority scheme can be extended to 4> levels
using a hierarchy f ;0@ device.
-
7/26/2019 8 Interrupts
47/51
The $eed for the ;0@'
The 0 I$T, interrupt scheme presented earlier hasa few
limitations: The ,+T instructions are all vectored to memorypage
8)
which is usually used for ,O. It re=uires additional hardwareto
produce the ,+T
instruction opcodes.
6riorities are set by hardware.
Therefore) we need a device li!e the ;0@' to expandthe priority
scheme and allow mapping to pages otherthan 8.
-
7/26/2019 8 Interrupts
48/51
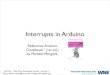
Interfacing the ;0@' to the 0De%& 7
De%& 6
De%& 5
De%&
De%& !
De%& "
De%& #
De%& $
'
"5
>
,
'$
'
5
()T,
()TR
,D7,D6
,D5
,D
,D!
,D"
,D#,D$
(7
(6
(5
(
(!
("
(#
($
-
7/26/2019 8 Interrupts
49/51
Operating of the ;0@'
The ;0@' re=uires the microprocessor to provide ;control words
to set up its operation. 'fter that) thefollowing se=uence
occurs:
. One or more interrupts come in.
;. The ;0@' resolves the interrupt priorities based on
itsinternal settings
-
7/26/2019 8 Interrupts
50/51
Operating of the ;0@'
4. (hen the microprocessor receives the op%code forB'CC instead
of ,+T) it recogniAes that the devicewill be sending 4 more bits
for the address.
5. The microprocessor sends a second I$T'signal.. The ;0@' sends
the high order byteof the I+,Es
address.
@. The microprocessor sends a third I$T'signal.
. The ;0@' sends the low order byteof the I+,Esaddress.
. The microprocessor executes the B'CC instructionand *umps to
the I+,.
-
7/26/2019 8 Interrupts
51/51
3irect emory 'ccess
This is a process where data is transferred betweentwo
peripherals directly without the involvementof the microprocessor.
This process employs the 8OC3 pin on the
microprocessor The external 3' controller sends a signal on the
8OC3 pin
to the microprocessor.
The microprocessor completes the current operation and sendsa
signal on 8C3' and stops using the buses.
Once the 3' controller is done) it turns off the 8OC3 signaland
the microprocessor ta!es bac! control of the buses.