Embed Size (px)
Citation preview

CruiseCommandManual de instalación
y solución de problemasMM14330 Rev.F 5/03


LISTA DE REVISIONES
Página 10
Lista de revisiones
REV FECHA DESCRIPCIÓN DE LA REVISIÓN
A 9/01 1. HA SUSTITUIDO AL ANEXO B SER-165.
B 11/01 MANUAL COMPLETO REVISADO SEG∨ N LOS ESTÁNDARES ACTUALES DE ZF MATHERS, LLC.1. SECCIONES REVISADAS 3.7, 5.7, 6.3, (DE LA 4.1 A LA 4.0), 6.3.4, 7.5, 9.1 2. TRAIN-156 REVISADO
C 2/02 CAMBIOS REALIZADOS POR ELR 637, ECN 2556, 2574.1. SECCIÓN REVISADA 9.12. LISTA DE PIEZAS DEL APPENDIX A-1 REVISADA.3. SER-165 DEL APPENDIX B-1 REVISADO.
CAMBIOS REALIZADOS POR ELR 7071. SECCIÓN REVISADA 5.4.12. TRAIN-156 DEL APPENDIX B-1 REVISADO
CAMBIOS REALIZADOS POR ELR 6941. SECCIÓN REVISADA 4.1
D 5/02 1. SECCIÓN REVISADA 4.1, SECCIÓN 5.2.2, 5.2.3, 6.3.18 2. APPENDIX A-1 REVISADO - HOJA DE LOS FABRICANTES ALEMANES Y APS S-2143. SER-165 DEL APPENDIX B-1 REVISADO.
E 12/02 1. SECCIÓN DE OPERACIONES DE MODO DE CALENTAMIENTO AÑADIDAS2. SECCIÓN REVISADA 5.4.22. REVISADOS TODOS LOS FORMULARIOS DEL APPENDIX A-1. F-253 AÑADIDO3. APPENDIX B-1 SOLUCIÓN DE PROBLEMAS: TRAIN-156 Y SER-165 REVISADOS. TRAIN-157 Y TRAIN-158
REVISADOS, SUSTITUIDOS POR MM13927.
F 5/03 SOFTWARE REVISADO HASTA .1
1. SECCIONES REVISADAS: 1.1, 1.2, 1.3, 2.1, 2.3, 2.5, 2.6, 2.7, 2.7.3, 2.9, 3.2, 3.4.1, 4.2.1.1, 4.2.1.2, 4.2.2, 4.2.4, 4.2.5.1, 4.2.5.2, 4.4, 5.0, 5.1, 5.2, 5.3.3, 5.3.5, 5.3.7, 5.3.10, 5.3.13, 5.3.16, 6.3, 6.9, 7.3.1.1, 7.3.1.2, 7.6, 8.2,
2. SECCIONES AÑADIDAS: 5.3.5, 5.3.18, 6.10, 3. SECCIONES AÑADIDAS: (SECCIÓN 3.2, FIGURA 15)4. SECCIONES DESPLAZADAS: [2.10.1.2, 2.10.2 Y 2.10.3, SE HAN COMBINADO PARA FORMAR LA SECCIÓN 2.10.1.2.
LA SECCIÓN 2.10.4 PASA A SER LA SECCIÓN 2.10.2.] [LA SECCIÓN 5.3.1 PASA A SER LA SECCIÓN 5.3.2. LA SECCIÓN 5.3.2 PASA A SER 5.3.1.]
5. FIGURAS REVISADAS: (SECCIÓN 3.1, FIGURE 12:) (SECCIÓN 3.2, FIGURA 13)6. TABLAS REVISADAS: (SECCIÓN, TABLE 1:) (SECCIÓN 6.3, TABLE 4:) (SECCIÓN 6.4.1, TABLE 5:)7. APPENDIX A - HOJAS DE SERVICIO SUSTITUIDAS CON LOS NIVELES DE REVISIÓN MÁS ACTUALES
8. APPENDIX B SER-165 Y TRAIN-156 REVISADOS. 9. APPENDIX C ESQUEMAS DEL 12230-1 AL 12230-5 REVISADOS.
G 8/03 CAMBIO DE FORMATO MANUAL A FORMATO MODULAR

INTRODUCCIÓN
Página 13
1.0 INTRODUCCIÓN
1.1 ESTE MANUAL
Este manual se ha elaborado únicamente para aplicaciones de hélice única y hélice doble, con un máximo de hasta cuatro (4) estaciones remotas. El sistema CruiseCommand tiene la capacidad de hacer funcionar aplicaciones de hasta cinco (5) hélices y ocho (8) estaciones remotas. Si usted posee una aplicación para una hélice triple o superior y/o cinco (5) o más estaciones remotas, póngase en contacto con su representante local de ZF Mathers para obtener más información.El objetivo de este manual es:
• Funcionamiento (sección 2.0)
• Plan de instalación (sección 3.0)
• Instalación (sección 4.0)
• Ajuste (sección 5.0)
• Ajustes (sección 6.0 y 7.0)
• Opciones (sección 8.0)
• Mantenimiento (sección 7.0)
• Hojas de servicio ZF Mathers (Appendix A)
• Solución de problemas (Appendix B)
• Esquemas generales del sistema (Appendix C)
Conserve este manual para futuras consultas.
A lo largo del manual, se deberá prestar una atención especial a los siguientes cuadros:
El Appendix A contiene las hojas de servicio creadas por ZF Mathers para ayudar a la reparación, ajuste y documentación de los parámetros de esta embarcación.
El Appendix B contiene explicaciones acerca de solución de problemas. Si no puede encontrar una solución consultando este apartado, póngase en contacto con alguna de las empresas enumeradas en la Lista de contactos de ZF Mathers SER-165 incluida al comienzo del Appendix B.
NOTA: CONTIENE INFORMACIÓN DE AYUDA
PRECAUCIÓN: Si no se tiene en cuenta este mensaje, el equipamiento podría dañarse.
ADVERTENCIA: PODRÍAN PRODUCIRSE DAÑOS PERSONALES, SI ESTE MENSAJE NO SE TIENE EN CUENTA.

INTRODUCCIÓN
Página 14
El Appendix C contiene esquemas básicos del sistema. No se pueden incorporar al sistema todas las opciones disponibles. Lea SOLAMENTE las secciones que están relacionadas con la aplicación utilizada en esta embarcación.

INTRODUCCIÓN
Página 14
1.2 SISTEMA CRUISECOMMAND
El sistema CruiseCommand está diseñado para:
• Motores que necesiten una señal de mando de tensión, corriente (mA), frecuencia, modulación de la magnitud del impulso (PWM) o velocidad
• Transmisiones equipadas con un embrague de solenoide o un embrague/sistema de ralentización del motor de solenoide
1.3 CARACTERÍSTICAS
• Secuenciado del embrague y de la velocidad del motor (sección 2.1)
• Enclavamiento de arranque (sección 2.4)
• Indicación de la estación remota al mando (sección 2.5)
• Modo de calentamiento (sección 2.6)
• Ralentí alto/bajo (sección 2.7)
• Sincronización de motores (doble hélice) (sección 2.8)
• Funcionamiento con una palanca (doble hélice) (sección 2.9)
• Control eléctrico de la válvula de ralentización del motor (sección 2.10)
• Conexiones de cables (sección 3.2)
• Ajuste de teclado (sección 5.2)
• Protección de emergencia en cambios de dirección (secciones 5.3.13, 5.3.14 y 5.3.15)
• Contacto de alarma de fallo en el sistema CruiseCommand (opcional) (Sección 8.1)
• Enclavamiento de la presión del aceite del embrague (opcional) (sección 8.2)
• Sistema integrado de diagnósticos (Appendix B)
• Indicadores sonoros y visuales (Appendix B)
• De una a cuatro estaciones remotas (secciones 3.3 y 4.4)

FUNCIONAMIENTO
Página 15
2.0 FUNCIONAMIENTO
2.1 ACTIVACIÓN DE LA CORRIENTE CCCuando la corriente continua (CC) del sistema de control se activa:
• El procesador ordenará punto muerto/ralentí.• Se escuchará un tono lento y repetitivo en todas las estaciones
indicando que ninguna estación tiene el control del sistema.
2.2 TOMAR EL CONTROL
Para tomar el mando en una estación:• La(s) palanca(s) del sistema de control debe(n) estar en la
posición de bloqueo de punto muerto.• El operador debe pulsar el botón de transferencia durante
medio segundo.El tono se detendrá en todas las estaciones y el LED rojo del sistema de control se iluminará, indicando que la estación está al mando.
2.3 FUNCIONAMIENTO BÁSICO
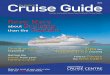
El sistema de control tiene tres posiciones de bloqueo: Popa, Punto muerto y Proa. (consultar Figure 1:) Con la(s) palanca(s) del sistema de control en la posición de bloqueo de Punto muerto (vertical), el Sistema controlará las RPM en punto muerto y al ralentí. Un movimiento de 15 grados de la palanca del sistema de control hacia la posición de bloqueo Proa o Popa controlará el acoplamiento del embrague hacia Proa o Popa mientras el motor mantiene las RPM al ralentí. Un desplazamiento mayor de la palanca del sistema de control incrementará las RPM del motor proporcionalmente a la posición de la palanca del sistema de control.
NOTA: SÓLO UNA ESTACIÓN TIENE EL MANDO.

FUNCIONAMIENTO
Página 16
Figure 1: Posiciones de bloqueo del sistema de control

FUNCIONAMIENTO
Página 16
2.4 ENCLAVAMIENTO DE ARRANQUE DEL MOTOR
La señal de arranque del motor se bloquea, a menos que los siguientes casos sean ciertos:
• La alimentación CC se ha activado para el sistema de control.• Una estación tiene el mando.• El sistema de control ordena punto muerto.
2.5 TRANSFERENCIA DE ESTACIÓN
Al transferir el mando de una estación a otra:
D) Las posiciones ordenadas del acelerador y del embrague no cambiarán durante un segundo después de que se ilumine el indicador rojo. Esto da tiempo al operador para desplazar la(s) palanca(s) del sistema de control hasta una posición que coincida aproximadamente con la última posición de la estación, lo que permitirá a la embarcación mantener la velocidad y la dirección actuales.
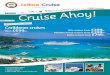
ADVERTENCIA: PUEDEN CAUSARSE LESIONES PERSONALES SI LOS SIGUIENTES PASOS NO SE SIGUEN DE FORMA EXACTA.
Figure 2: Estaciones remotas antes de la transferencia de mando
Figure 3: Estación remota después de la transferencia de mando
A) Deje la(s) palanca(s) del sistema de control de la estación al mando en cualquier posición.
B) Deje la(s) palanca(s) del sistema de control de la estación receptora en la posición de bloqueo de punto muerto. (consultar la Figure 2:)
C) En la estación que toma el mando, mantenga pulsado el botón de transferencia durante medio segundo. (Véase Figure 3:)
• El LED rojo se iluminará en el sistema de control de la estación receptora, indicando que la estación ha tomado el control.
• El LED rojo dejará de iluminarse en el sistema de control de la estación transmisora, indicando que la estación ya no tiene el mando.

FUNCIONAMIENTO
Página 17
2.6 MODO DE CALENTAMIENTO
Esta opción permite que el operador pueda aumentar las RPM del motor mientras el embrague permanece en punto muerto. El modo de calentamiento sólo funciona en la proa. El sistema pasa al modo de calentamiento de la siguiente forma:
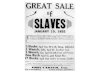
A) En la estación al mando, asegúrese de que la palanca del sistema de control se encuentra en la posición de bloqueo de punto muerto (consulte la Figure 4:):
B) Mantenga pulsado el botón de transferencia. C) Después de un segundo, desplace la palanca del sistema de
control hasta la posición de bloqueo de proa, mientras sigue pulsando el botón de transferencia.
D) A continuación, deje de pulsar el botón de transferencia. • El indicador rojo parpadeará lentamente indicando el modo de
calentamiento y que el embrague permanece en punto muerto. E) A continuación, el operador puede arrancar y calentar el
motor al mismo tiempo que desplaza la palanca del sistema de control hasta las posiciones del acelerador de proa.
F) Cuando la palanca del sistema de control regresa a la posición de bloqueo de punto muerto, el LED rojo dejará de parpadear, el modo de calentamiento se desactivará y el sistema CruiseCommand se reiniciará para pasar al modo de funcionamiento normal después de un segundo.
ADVERTENCIA: PUEDEN CAUSARSE LESIONES PERSONALES SI LOS SIGUIENTES PASOS NO SE SIGUEN DE FORMA EXACTA.
Figure 4: Modo de calentamiento del sistema de control

FUNCIONAMIENTO
Página 18
G) El siguiente movimiento de la palanca del sistema de control cambiará la transmisión.
Figure 5: Modo de funcionamiento normal del sistema de control

FUNCIONAMIENTO
Página 18
2.7 MODOS DE RALENTÍ ALTO/BAJO
El sistema de control ofrece dos opciones de ajuste de RPM al RALENTÍ del motor.
• Modo de ralentí bajo (valor predeterminado)• Modo de ralentí alto (valor elevado ajustable de RPM a ralentí)
2.7.1 Ralentí bajoRalentí bajo RPM al ralentí del motor normal. Cuando el sistema está inicialmente activado, siempre controlará el ralentí bajo.
2.7.2 Ralentí altoAl ajustar, se puede programar un valor de RPM de ralentí alto. El ajuste máximo del ralentí alto es del 20% de la aceleración máxima.
2.7.3 Selección entre ralentí alto/ralentí bajo
Para seleccionar entre ralentí alto y ralentí bajo ( o viceversa) en la estación remota al mando: (consultar la Figure 6:)
A) Las palancas del sistema de control deben estar en punto muerto o en la posición de bloqueo de popa o proa.
B) Deje de pulsar y presione el botón de transferencia durante 1/2 segundo y, a continuación, suéltelo.
• Si el sistema se encontraba en el modo de ralentí bajo, cambiará al modo de ralentí alto y viceversa.
C) Para volver al ajuste de ralentí anterior, deje de pulsar y presione otra vez el botón de transferencia durante 1/2 segundo y, a continuación, suéltelo.
Figure 6: Selección de modo de ralentí alto/bajo
ADVERTENCIA: PUEDEN CAUSARSE LESIONES PERSONALES SI LOS SIGUIENTES PASOS NO SE SIGUEN DE FORMA EXACTA.

FUNCIONAMIENTO
Página 19
2.8 SINCRONIZACIÓN DEL MOTOR (DOBLE HÉLICE)La sincronización es automática y sólo funciona cuando el embrague de proa está accionado, por lo que puede dejarse activada en todo momento. El sistema de control siempre activará la alimentación con la sincronización activada.Para que se active la sincronización y sincronice las RPM de los motores, deben cumplirse los criterios de sincronización.
2.8.1 Tipos de sincronización
2.8.1.1 Sincronización similar del acelerador (doble hélice) (valor predeterminado)Este tipo de sincronización utiliza los criterios, indicaciones y se activa y desactiva tal y como se indica en las secciones 2.8.2, 2.8.3, 2.8.4 y 2.8.5. La sincronización similar del acelerador hace que los procesadores envíen la misma o una señal de control de acelerador similar a los motores que cumplan los criterios. Con la sincronización similar del acelerador, los procesadores no reciben señales de cuentavueltas representativas de las RPM de los motores.
2.8.1.2 Sincronización activa (doble hélice) (valor predeterminado desactivado)La sincronización activa debe activarse durante el ajuste y debe utilizarse un mazo de cables del sensor del cuentavueltas.Este tipo de sincronización utiliza los criterios, indicaciones y se activa y desactiva tal y como se indica en las secciones 2.8.2, 2.8.3, 2.8.4 y 2.8.5. Cada procesador recibe una señal de cuentavueltas que representa las RPM del motor de sus respectivos motores. Estas señales se comparan con el resto a través de una línea de comunicación en serie. Si los criterios de sincronización (descritos en la sección 2.8.2) se cumplen, la señal de control del acelerador del motor en funcionamiento con unas RPM superiores se reduce hasta que las RPM de ambos motores coincidan.
2.8.2 Criterios de sincronizaciónLos criterios de sincronización se cumplen cuando todas las condiciones que aparecen a continuación son ciertas:
PRECAUCIÓN: El sistema de control seguirán sincronizadas mientras las palancas del sistema de control estén cercas unas de otras. Si una palanca se desplaza hasta un punto en el que el se supera el 10% del valor del acelerador, se producirá un aumento del 10% en las RPM del motor con un motor, dando como resultado un cambio súbito de la dirección de la embarcación.

FUNCIONAMIENTO
Página 20
• Las dos palancas del sistema de control controlan el accionamiento del embrague de proa.
• Las dos palancas del sistema de control controlan, como mínimo, un 5% del intervalo del acelerador.
• Los aceleradores controlados se encuentran dentro de un margen de un 10% respecto al resto.
2.8.3 Indicaciones de sincronización:• El LED verde situado en el sistema de control indica el estado de
la sincronización.• Cuando el LED verde de la estación al mando parpadea, el
sistema de control está realizando la sincronización.• Cuando el LED verde de la estación al mando está
permanentemente encendida, los motores están sincronizados.• Cuando el LED verde de la estación al mando no está encendido,
los motores no están sincronizados y el sistema de control no está intentando realizar la sincronización.
2.8.4 Desactivación de sincronización:A) Asegúrese de que las palancas del sistema de control estén
colocadas en un punto en el que se cumplan los criterios de sincronización.
B) Mantenga pulsado el botón de transferencia hasta que el LED verde parpadee y se apague (aproximadamente, 2 segundos). En esos momentos, la sincronización quedará desactivada.
2.8.5 Activación de sincronización:A) Asegúrese de que las palancas del sistema de control estén
colocadas en un punto en el que se cumplan los criterios de sincronización.
B) Mantenga pulsado el botón de transferencia hasta que el LED verde parpadee (aproximadamente, 2 segundos).
• El LED verde parpadeará indicando que el sistema está intentando la sincronización.
• El LED verde pasará a iluminarse de forma continuada cuando los motores estén sincronizados.

FUNCIONAMIENTO
Página 21
2.9 MODO DE FUNCIONAMIENTO CON UNA PALANCA (DOBLE HÉLICE)Este sistema utiliza el modo de funcionamiento con una palanca para permitir que una palanca (Master) del sistema de control controle todos los controles y transmisiones. La palanca “Master” puede ser cualquier palanca. La ventaja de esto es que con una única palanca del sistema de control funcionan todos los motores y transmisiones. La secuencia y distribución normales de control de aplican a todos los motores.
2.9.2 Para desactivar el modo de funcionamiento con una palanca:A) Coloque la palanca Master del sistema de control en la
posición de bloqueo de punto muerto.B) Coloque la palanca inactiva del sistema de control en la
posición de bloqueo de punto muerto.
NOTA: PUEDE UTILIZARSE EL FUNCIONAMIENTO CON UNA PALANCA EN EL MODO DE RALENTIZACIÓN DEL MOTOR O EN EL MODO SIN RALENTIZACIÓN DEL MOTOR.
NOTA: EL LED VERDE PERMANECERÁ ENCENDIDO MIENTRAS SE ENCUENTRE EN ESTE MODO, SEA CUAL SEA LA POSICIÓN DE LA PALANCA “MASTER” DEL SISTEMA DE CONTROL.
ADVERTENCIA: PUEDEN CAUSARSE LESIONES PERSONALES SI LOS SIGUIENTES PASOS NO SE SIGUEN DE FORMA EXACTA.
Figure 7: Paso A del modo de funcionamiento con una palanca
Figure 8: Paso B del modo de funcionamiento con una palanca
El modo de funcionamiento con una palanca debe activarse.
2.9.1 Para activar el modo de funcionamiento con una palanca:A)En la estación al mando, desplace
todas las palancas de control a la posición de bloqueo de proa.
B)Mantenga pulsado el botón de transferencia, mientras mueve la palanca Master del sistema de control a la posición de bloqueo de proa. NO LIBERE EL BOTÓN DE TRANSFERENCIA hasta que la luz verde se ilumine, indicando que el modo de funcionamiento con una palanca ya está activo.
NOTA: LA PALANCA DEL SISTEMA DE CONTROL QUE ESTÁ INACTIVA PUEDE DESPLAZARSE A CUALQUIER POSICIÓN HACIA ADELANTE EN LA POSICIÓN DE BLOQUEO DE PROA.

FUNCIONAMIENTO
Página 22
C) El LED verde se apagará, indicando que el sistema de control se encuentra en modo de funcionamiento normal.
ADVERTENCIA: SE RECOMIENDA QUE LA PALANCA MASTER REGRESE A LA POSICIÓN DE PUNTO MUERTO/RALENTÍ ANTES DE DESACTIVAR EL MODO DE FUNCIONAMIENTO CON UNA PALANCA. SI NO LO HACE ASÍ, PUEDE PROVOCAR UN CAMBIO REPENTINO EN LA DIRECCIÓN DE LA EMBARCACIÓN.

FUNCIONAMIENTO
Página 22
2.10 FUNCIONAMIENTO DE LA VÁLVULA DE RALENTIZACIÓN DEL MOTOR (OPCIONAL)Este sistema de control es capaz de controlar las válvulas eléctricas de ralentización del motor que utilicen solenoides simples o duales. La opción de modo de ralentización del motor se selecciona durante el ajuste.
2.10.1 Control de la válvula de ralentización del motor Modos de funcionamientoEste sistema dispone de dos modos de funcionamiento cuando ya se ha ajustado un tipo de válvula de ralentización del motor: Ralentización del motor y no-ralentización del motor. Cuando se activa la alimentación del sistema de control por primera vez, el modo predeterminado de funcionamiento es el modo de no ralentización del motor.
2.10.1.1 Funcionamiento en modo de no ralentización del motorDurante el modo de no ralentización del motor, la válvula de ralentización permanece bloqueada o en la posición de presión de aceite máxima y el sistema funcionará en el modo de funcionamiento normal.
2.10.1.2 Funcionamiento en modo de ralentización del motor (activación/desactivación)
El modo de ralentización es una opción que debe activarse y desactivarse en el sistema de control.
A) Para activar el modo de ralentización del motor, coloque la palanca de control en la posición de bloqueo de punto muerto, proa o popa.
B) Mantenga pulsado el botón de transferencia durante dos (2) segundos.• El indicador de luz roja fija del sistema de control
parpadeará rápidamente, indicando que el sistema está ahora en modo de ralentización del motor.
C) Una vez que el sistema se encuentre en modo de ralentización del motor y en la posición de bloqueo de proa o popa, el propulsor comenzará a girar a, aproximadamente, el 30% de las RPM de bloqueo del ralentí. • El acelerador permanecerá al ralentí;
ADVERTENCIA: PUEDEN CAUSARSE LESIONES PERSONALES SI LOS SIGUIENTES PASOS NO SE SIGUEN DE FORMA EXACTA.
NOTA: SI EL SISTEMA ESTÁ AJUSTADO PARA SU FUNCIONAMIENTO CON DOBLE HÉLICE, ASEG∨ RESE DE QUE LAS PALANCAS DEL SISTEMA DE CONTROL SE ENCUENTRAN EN LA POSICIÓN DE BLOQUEO DE PUNTO MUERTO/RALENTÍ (VERTICAL) O PROA/POPA.

FUNCIONAMIENTO
Página 23
• La transmisión solicitará proa o popa;• El LED rojo del sistema de control parpadeará.
D) Movimiento continuado de la palanca del sistema de control por él rango de ralentización del motor:• Incrementará las RPM del propulsor de un 30% de las RPM
del eje hasta, aproximadamente, el 70% de las RPM del eje;• El acelerador permanece al ralentí o puede ajustarse para
incrementar hasta un 20% de aceleración máxima dentro de este rango de ralentización del motor.
• El LED rojo del sistema de control quedará fija cuando la palanca del sistema de control alcance el final del rango de ralentización del motor.
E) El movimiento restante de la palanca del sistema de control más allá del rango de ralentización del motor:• El embrague se bloquea.• Aumentará la velocidad del motor hasta la máxima
aceleración.F) Para desactivar el modo de ralentización del motor,
coloque la palanca de control de la estación al mando en la posición de bloqueo de punto muerto, proa o popa.
G) Mantenga pulsado el botón de transferencia hasta que la luz indicadora roja del sistema de control cambie (aproximadamente, 2 segundos), a continuación, suelte el botón:• Cuando la luz indicadora roja permanece fija, el sistema de
control ha desactivado el modo de ralentización del motor. El embrague está bloqueado.
2.10.2 Tipos de control de válvula de ralentización del motor • 00 = Sin válvula de ralentización (consulte la sección 2.10.1.1 para conocer su
funcionamiento) • 01 = Tipo 1 rango de ralentización del motor de 20 grados (consulte la
sección 2.10.1.2 para conocer su funcionamiento)
• 02 = Tipo 2 rango de ralentización del motor de 35 grados (consulte la sección 2.10.1.2 para conocer su funcionamiento)
• 03 = Tipo 3 rango de ralentización del motor de 45 grados (consulte la
sección 2.10.1.2 para conocer su funcionamiento)
La activación/desactivación del modo de ralentización del motor es la misma para los tres (3) tipos de ralentización (01, 02, 03). El tipo de modo de ralentización del motor se selecciona durante el ajuste 5.3.16.
NOTA: CUANDO SE UTILIZA EL TIPO 3 DE RALENTIZACIÓN DEL MOTOR, LA ACELERACIÓN MÁXIMA SE LIMITA AL 75%.

FUNCIONAMIENTO
Página 24
Figure 9: Rango de ralentización del motor del sistema de control de 20
grados - Tipo 1
Figure 10: Rango de ralentización del motor del sistema de control de 35 grados
- Tipo 2
Figure 11: Rango de ralentización del motor del sistema de control de 45 grados
- Tipo 3

PLANIFICACIÓN DE LA INSTALACIÓN
Página 24
3.0 PLANIFICACIÓN DE LA INSTALACIÓN
3.1 PROCESADOR
3.1.1 Requisitos
3.1.2 Ubicación
Los procesadores son a prueba de salpicaduras, pero no deben sumergirse.Se prefiere un compartimento de motor como ubicación para el procesador.
• Si el compartimiento del motor es demasiado pequeño, sitúelo en cualquier lugar accesible para las conexiones eléctricas.
Se prefiere el montaje en paneles para una mayor facilidad de acceso para el cableado y la realización de ajustes.El procesador puede montarse en cualquier posición, siempre que el LED de la cubierta delantera pueda leerse. No monte el procesador en el motor, en la transmisión, ni ninguna posición que lo pueda someter a una vibración excesiva. Consulte la Figure 16:, page 28, para conocer las dimensiones del procesador.Sitúe el/los procesador(es) lejos de las fuentes de calor, como turboalimentadores de los colectores de escape de los motores. Deje 4 pies (1,2m) de espacio o más entre el/los procesador(es) y dichas fuentes de calor.
NOTA: ZF MATHERS RECOMIENDA QUE EL SISTEMA SE INSTALE DE ACUERDO CON LAS NORMAS ABYC E-9 Y P24.
11
Figure 12: Procesador
El procesador recibe la tensión CC variable desde el/los sistema(s) de control y convierte estas entradas en las salidas electrónicas o eléctricas adecuadas en el momento y secuencia correctos para el regulador y la caja de cambios. La información relacionada con el tipo de acelerador, secuenciado del acelerador/transmisión, etc., está guardada en la memoria, dentro del procesador.Se necesita un procesador por motor:
Una sola hélice:Una (1) 785CEDoble hélice: Dos (2) 785CE
El equipo de montaje lo suministra el instalador.El manual viene incluido con el procesador.
NOTA: LEA LA GARANTÍA QUE APARECE EN EL APPENDIX A. UNA UBICACIÓN INADECUADA PUEDE CANCELAR LA GARANTÍA.
PRECAUCIÓN:Los campos electromagnéticos pueden causar interferencias en los circuitos electrónicos del sistema CruiseCommand.

PLANIFICACIÓN DE LA INSTALACIÓN
Página 25
No lleve a cabo el montaje cerca de sistemas de ignición de motor por gas, alternadores o motores eléctricos. Deje 4 pies (1,2 m) de espacio entre el procesador y los alternadores o motores eléctricos.
NOTA: SE RECOMIENDA LA UNIÓN PARA UN RENDIMIENTO DE COMPATIBILIDAD ELECTROMAGNÉTICA (EMC) MÁXIMO. SE SUMINISTRA UN ORIFICIO ROSCADO PARA LA CONEXIÓN AL SISTEMA DE UNIONES DE LA EMBARCACIÓN.

PLANIFICACIÓN DE LA INSTALACIÓN
Página 25
3.2 MAZO DE CABLES
Figure 13: es una lista general de los mazos de cables disponibles para el sistema CruiseCommand. No todos los mazos de cables se pueden utilizar en cualquier sistema. La utilización del mazo de cables depende de las opciones utilizadas en la embarcación. Todos los mazos de cables están disponibles en ZF Mathers, LLC. Puede consultar una lista completa de mazos de cables en el Appendix A.Estación 2, Estación 3, Estación 4, conexiones de impulso y en serie en el procesador están sellados en los tapones desde fábrica. Si deben utilizarse los conectores, retire estos tapones. Cada conector debería tener un mazo de cables o un terminal. No deje ningún conector vacío.
Figure 13: Ubicaciones de conectores del mazo de cables del procesador
(1) Mazo de cables del procesador
(2) Mazo de cables de alimentación/enclavamiento de arranque/presión del embrague (opcional)/circuito de alarma (opcional)
(3) Mazo de cables del embrague/ralentización del motor [estándar] (o MAN opcional con ralentización del motor o MAN sin mazo de cables de ralentización del motor)
(4) Mazo de cables del sistema de control
(5) Mazo de cables de comunicación en serie (doble hélice)
(6) Mazo de cables del sensor del cuentavueltas (sólo doble hélice utilizando sincronización activa)
Los mazos de cables utilizan uno o los dos tipos de conectores detallados en la Figure 14:. Cuando conecte los enchufes, asegúrese de soltar y sostener el botón o botones de desconexión hasta que el enchufeesté totalmente conectado o desconectado.
Figure 14: Conectores del mazo de cables
1
6
2 3
4
5

PLANIFICACIÓN DE LA INSTALACIÓN
Página 26
Asegúrese de que el conector del mazo de cables se encuentra en la orientación adecuada, utilizando el teclado para realizar las conexiones, antes de conectar el mazo al procesador. La conexión o desconexión de los terminales sin mantener pulsado el botón o botones de liberación causará daños en el terminal.
Figure 15: Conexión con ayuda del teclado
11573B
ConnectorKeying
Processor Harness

PLANIFICACIÓN DE LA INSTALACIÓN
Página 26
3.3 SISTEMAS DE CONTROL
Hay dos tipos de conexiones disponibles en el sistema de control:
• Enchufe conectado
• Terminal conectado
Consulte el Appendix A para ver las hojas de variaciones del sistema de control estándar para el tipo de sistema de control utilizado con este sistema.
3.4 ALIMENTACIÓN
3.4.1 Sistemas de controlAdemás de los mazos de cables de alimentación y de embrague, cada procesador necesita:
• Una o más baterías de 12 ó 24 voltios CC.• Dos cortacircuitos térmicos de corte libre de 5 amperios
(cuando se necesitan fuentes de alimentación aisladas) o un cortacircuito de 10 amperios con activación/desactivación manual.
• Selector Automático de Alimentación (consulte el Appendix A-25).
Las longitudes máximas de los cabes de alimentación del sistema CruiseCommand aparecen en la sección 4.2.1.1 y pueden verse ejemplos de las diferentes opciones de cableado en el Appendix C. En último término, es responsabilidad del constructor de la embarcación o del instalador asegurarse de que el cableado de la embarcación cumple con los requisitos eléctricos de la Norma E-9 de la American Boating & Yachting Councel para sistemas eléctricos CC.El cableado utilizado para suministrar alimentación desde la fuente de alimentación (batería) a través de los diferentes componentes (fusibles, panel de distribución, relés, etc.) a los procesadores deben estar preparados para una caída de tensión de un 10% o inferior utilizando 10 amperios como corriente máxima. Consulte la Norma E-9, tabla X, de la ABYC, para determinar el calibre adecuado de los cables para la longitud de conductor necesaria.Al utilizar el cable de alimentación de calibre 14 suministrado por ZF Mathers, y de acuerdo con la Norma E-9 de la ABYC, la distancia desde una fuente de alimentación de 12 voltios (batería o panel de distribución CC) no debe superar los 15 pies (4,6 m). En

PLANIFICACIÓN DE LA INSTALACIÓN
Página 27
sistemas de 24 voltios, la longitud máxima del cable es de 20 pies (6,1 m).ZF Mathers recomienda que se utilice un Selector Automático de Alimentación (APS) y una segunda fuente de alimentación (batería). Consulte la hoja de servicio APS del Appendix A y del Appendix C, los esquemas del sistema para ver ejemplos de suministros de alimentación aislados y no aislados.
3.4.2 EmbragueLa alimentación para los solenoides de embrague puede llegar desde la misma fuente de alimentación o desde otra diferente, igual que el procesador en el caso de que se necesite aislamiento.El cable de suministro de alimentación del embrague y los cables de alimentación CC del procesador pueden llegar desde el mismo cortacircuitos de 10 amperios o, en el caso de alimentación aislada, desde dos cortacircuitos independientes de 5 amperios. Consulte el Appendix C, esquemas del sistema para conocer los requisitos reales.
3.5 HERRAMIENTAS PARA LA INSTALACIÓN
3.5.1 Necesario• Destornillador – mediano, Phillips n.º 2
• Sierra de perforación - 1 pulgada (25,4 mm)
• Brocas - 7,2 mm y 5,6 mm
• Sierra (de un tipo adecuado para el corte de material sobre el que se monte el sistema de control)
3.5.2 Opcional• Cortador de cables, desmoldeador, pinzas de engarzar (Se recomienda
Thomas & Betts WT-2000) (Necesario si utiliza mazos de cables con una sola terminación)
• Unidad de prueba de servicio in situ (cuadro de inicio) (N/P 13927)
• Multímetro digital calibrado con PWM y frecuencia.
3.6 INTERRUPTOR DE PARADA DEL MOTOREs obligatorio que haya un interruptor de parada del motor en cada estación remota. Este interruptor lo suministra el instalador.
ADVERTENCIA: ES ABSOLUTAMENTE OBLIGATORIO TENER UN INTERRUPTOR DE PARADA DE MOTOR EN CADA ESTACIÓN. CONSULTE EL CFR 46, SEC. 62.35-5 Y ABYC P-24.5.8.

INSTALACIÓN
Página 28
4.0 INSTALACIÓNAntes de iniciar la instalación actual del CruiseCommand, asegúrese de que dispone de las piezas y herramientas adecuadas. Consulte la sección 3.0. Lea TODAS las instrucciones pertinentes para cada una de las piezas antes de iniciar la instalación de esa pieza.
4.1 PROCESADOR
A) Coloque el procesador en la superficie de fijación y marque los tres orificios de los tornillos.
B) Retire el procesador y perfore los orificios de los tornillos.C) Fije el procesador utilizando sujeciones de 1/4 de pulgada o M6. D) Conecte al sistema de uniones
NOTA: CUANDO CONECTE LAS TOMAS, ASEG∨ RESE DE QUE LOS BOTONES DE LIBERACIÓN ESTÁN PULSADOS HASTA QUE SE HAYAN REALIZADO LAS CONEXIONES. PARA DESCONECTAR LAS TOMAS, LOS BOTONES DE LIBERACIÓN DEBEN MANTENERSE PULSADOS HASTA QUE LA TOMA ESTÉ DESCONECTADA. CONSULTE LA FIGURE 14:, PAGE 25
NOTA: CUANDO INSTALE EL CABLE DEL MAZO, FIJE APARTE LOS CABLES UTILIZANDO ABRAZADERAS O TIRAS DE NO MÁS DE 18 PULGADAS (0,5 M) SI NO ESTÁN EN EL INTERIOR DE UN CONDUCTO. INSTALE CADA CABLE DE FORMA QUE QUEDE PROTEGIDO DE CUALQUIER DAÑO FÍSICO. CONSULTE EL ABYC ESTÁNDAR E-9.
Figure 16: Instalación del procesador

INSTALACIÓN
Página 29
4.2 INSTALACIÓN DEL MAZO DE CABLES
Consulte el Appendix A - Lista de piezas para saber cuál es el mazo de cables correcto para esta aplicación. Consulte únicamente las secciones relacionadas con el mazo de cables utilizado en esta aplicación.
4.2.1 Mazos de cables de alimentación/enclavamiento de arranque/presión del embrague (opcional)/circuito de alarma (opcional)Este mazo sólo tiene un terminal, que se conecta en el procesador. Dependiendo de las opciones necesarias, el mazo se suministra con dos, tres o cuatro cables de extensión desde el terminal.
• Alimentación del procesador (consulte la sección 4.2.1.1)• Enclavamiento de arranque (consulte la sección 4.2.1.2• Circuito de alarma externa (consulte la sección 8.1)• Interruptor de presión del embrague (consulte la sección 8.2)
Inserte el terminal del mazo de cables de alimentación en el conector POWER (alimentación) del procesador. Diríjase a las siguientes secciones relacionadas con esta aplicación.
4.2.1.1 Suministro de alimentaciónResulta vital diseñar y cablear el sistema de control de tal modo que proporcione la fuente de alimentación más limpia posible. Esto puede conseguirse suministrando dos fuentes de alimentación, junto con un APS, tal y como se muestra en la hoja de servicio S-214 del Appendix A. El sistema preferido es un circuito exclusivo sin ningún accesorio o función adicional.
• La salida APS es únicamente para procesadores CruiseCommand.
• Consulte la hoja de servicio S-214 del Appendix A: En el caso de que la longitud del cable etiquetado con la nota 2 en la Figura 1 supere los 30 pies (9,144 m) para sistemas de 12 VCC, o los 65 pies (19,812 m) para sistemas de 24 VCC, puede utilizarse el método alternativo mostrado en la Figura 2.
• Hay kits disponibles para el suministro de alimentación al procesador CruiseCommand, que contienen todos los componentes necesarios, además de los cables de alimentación. Consulte la hoja de servicio S-214 del Appendix A para obtener una lista de los kits disponibles.
Utilice la hoja de servicio S-214 y efectúe las conexiones para el suministro de alimentación.
ADVERTENCIA: CUANDO CONECTE EL MAZO DE CABLES DE ALIMENTACIÓN AL PROCESADOR, ASEG∨∨∨∨ RESE DE QUE EL SUMINISTRO DE ALIMENTACIÓN ESTÉ CORTADO.
NOTA: REPITA EL PROCESO PARA TODOS LOS PROCESADORES.

INSTALACIÓN
Página 30
4.2.1.2 Cable de enclavamiento de arranque
4.2.1.3 Circuito de alarma (opcional)Consulte la sección 8.1 en la sección Opciones.
4.2.1.4 Presión de embrague (opcional)Consulte la sección 8.2 en la sección Opciones.
4.2.2 Mazos de cables del sistema de controlExisten dos opciones de mazos de cables para el sistema de control dependiendo del tipo de sistema de control utilizado con esta aplicación.
• Conecte únicamente en el extremo para el procesador del mazo de cables. (sistemas de control de conexión mediante terminales)
• Conecte en los extremos del procesador y del sistema de control. (sistemas de control de conexión mediante clavijas)
La distancia del sistema de control hasta el procesador está limitada a la longitud de un mazo de cables de una pieza de 7 conductores. Nunca deberían realizarse empalmes en este cable.
A) Instale el mazo de cables del sistema de control entre cada uno de los sistemas de control y el procesador adecuado.
Figure 17: Conexiones de enclavamiento de arranque
A)Instale el cable de enclavamiento de arranque entre el solenoide de arranque y el procesador. (Véase Figure 17:)• Cuando instale el mazo de cables, fije aparte los
cables utilizando abrazaderas o tiras de no más de 18 pulgadas (0,5 m) si no están en el interior de un conducto.
• Instale cada mazo de cables de forma que quede protegido de cualquier daño físico.
B) Retire el cable del interruptor de arranque remoto del solenoide del motor de arranque.
C) Pele y conecte un cable de enclavamiento de arranque a este cable.
D)Pele y conecte el segundo cable del enclavamiento de arranque al solenoide de arranque.
E) Repita el proceso para todos los procesadores.
PRECAUCIÓN: El procesador está diseñado para una corriente de señal de arranque máxima de 5 amperios y 50 voltios. Una corriente mayor dañará el circuito de enclavamiento.
PRECAUCIÓN: El origen de problemas más común son unas conexiones flojas de los cables. Compruebe que los conectores del cableado están bien fijados y que no pueden salirse. Las fijaciones y las conexiones deben realizarse en el cable, no en el aislante del cable. Compruebe que todas las conexiones atornilladas están fijas.

INSTALACIÓN
Página 31
B) Etiquete cada mazo de cables en ambos extremos, con la estación a la que se conecta y babor o estribor para aplicaciones de doble hélice.
Cuando instale el mazo de cables, fije aparte los cables utilizando abrazaderas o tiras de no más de 18 pulgadas (0,5 m) si no están en el interior de un conducto. Consulte el ABYC Estándar E-9.Instale cada mazo de cables de forma que quede protegido de cualquier daño físico.Consulte la hoja de servicio del sistema de control adecuado en el Appendix A para ver las conexiones de cables.
4.2.3 Mazo de cables del acelerador
El/los procesador(es) se conecta(n) directamente a la interfaz del motor utilizando un mazo de cables de acelerador.
A) Conecte el extremo del terminal del mazo de cables del acelerador en el conector THROTTLE (acelerador) en el procesador.
B) Lleve el cable hasta la interfaz del motor. C) Consulte la documentación del motor para conocer los
puntos de terminación de la interfaz del motor.
4.2.4 Sincronización (sólo para aplicaciones de varias hélices)El método de sincronización predeterminado del sistema es Sincronización similar del acelerador. Con este tipo de sincronización, los procesadores aseguran que se aplicará la misma señal o una señal de mando similar de acelerador a los dos reguladores cuando se cumplan los criterios de sincronización. Aunque no se trate de una sincronización real, en la mayoría de los casos, este tipo de sincronización es muy eficaz. (Para obtener más información, consulte la sección 2.8.1.1, page 19.)Si se necesita o se solicita una sincronización real, se deberá seleccionar la sincronización activa durante el ajuste. Además, la sincronización activa requiere una señal de cuentavueltas significativa de las RPM de todos los motores (para obtener más información, consulte la sección 2.8.1.2, page19). La frecuencia de estas señales se mide y cambia a las salidas de señales de mando del acelerador de los procesadores hasta que la frecuencia
PRECAUCIÓN: Asegúrese de todos los sistemas de control están conectados al mismo conector de estación en todos los procesadores. EJEMPLO: El sistema de control de la estación 1 se conectará al conector Estación 1 del procesador de babor y al conector Estación 1 del procesador de estribor.
NOTA: ASEG∨ RESE DE QUE TODOS LOS PROCESADORES ESTÁN AJUSTADOS UTILIZANDO EL MAZO DE CABLES Y LA MISMA SELECCIÓN DE AJUSTE DE MOTOR.

INSTALACIÓN
Página 32
de ambos motores es la misma y los dos motores funcionan con las mismas RPM.
4.2.4.1 Mazo de cables de comunicación en serieLos procesadores necesitan estar interconectados con un mazo de cables de comunicación en serie, como se indica en el dibujo del Appendix C. Estos mazos de cables se conectarán en los dos extremos del cable.
A) Retire la tapa de la toma SERIAL (serie) de todos los procesadores.
B) Inserte el terminal del mazo de cables de comunicación en serie en el conector SERIAL (serie) en una de las cubiertas del procesador.
C) Lleve el mazo de cables hasta el siguiente procesador y conéctelo en el conector SERIAL (serie) del procesador.
4.2.4.2 Mazo de cables del sensor del cuentavueltas (sólo para sincronización activa)Este mazo de cables tiene un terminal sólo en un extremo del cable. El extremo del terminal coincide con el conector de impulsos del procesador. El otro extremo interactúa con el transmisor de impulsos del motor.
A) Retire la tapa del conector PULSE (impulso) del procesador.
B) Inserte el terminal del mazo de cables del sensor del cuentavueltas en el conector PULSE (impulso) del procesador.
C) Lleve el cable del sensor del cuentavueltas de babor hasta el transmisor de impulsos del motor de babor.
D) Lleve el cable del sensor del cuentavueltas de estribor hasta el transmisor de impulsos del motor de estribor.
E) Realice las conexiones de cables del cuentavueltas tal y como se indica en la documentación del fabricantes de los motores.

INSTALACIÓN
Página 33
4.2.5 Mazo de cables del embrague y de ralentización del motor [opcional]Estos mazos de cables se conectarán únicamente en el extremo del cable del procesador. Consulte el Appendix A - Lista de piezas para saber cuál es el mazo de cables correcto para esta aplicación. Consulte únicamente las secciones relacionadas con el mazo de cables utilizado en esta aplicación.
4.2.5.1 Sólo control del embragueEl mazo de cables del embrague se suministra con 3 ó 4 cables que salen del terminal.
• Uno para el solenoide del embrague de proa• Uno para el solenoide del embrague de popa• Uno para el solenoide del embrague de punto muerto
(opcional)• Uno para la alimentación del embrague
A) Inserte el terminal del mazo de cables en el conector CLUTCH (embrague) de la cubierta del procesador.
B) Lleve los dos cables etiquetados como embrague de proa y de popa (y el embrague de punto muerto si se utiliza) hasta la transmisión.
C) Consulte la documentación de la transmisión para conocer los puntos de terminación de los solenoides del embrague.
D) Lleve el cable etiquetado como Alimentación hasta el cortacircuitos del procesador principal. Consulte los esquemas del Appendix C.
4.2.5.2 Control del embrague y de la ralentización del motorEl mazo de cables del embrague/ralentización del motor se suministra con 3 o más cables que salen del terminal.
• Uno para el solenoide de control de ralentización del motor• Uno para el solenoide de activación/desactivación de
ralentización del motor• Uno para el solenoide del embrague de proa (consulte la
sección 4.2.5.1)• Uno para el solenoide del embrague de popa (consulte la
sección 4.2.5.1)• Uno para el solenoide del embrague de punto muerto (consulte
la sección 4.2.5.1)• Uno para la alimentación del embrague (consulte la sección
4.2.5.1)E) Inserte el terminal del mazo de cables en el conector
CLUTCH (embrague) del procesador. F) Lleve los dos cables etiquetados como control de la
ralentización del motor y activación/desactivación de ralentización del motor hasta la transmisión.

INSTALACIÓN
Página 34
G) Consulte la documentación de la transmisión para conocer los puntos de terminación de los solenoides de ralentización del motor.
H) Lleve los cables etiquetados como proa, punto puerto y popa hasta la transmisión.
I) Lleve el cable etiquetado como Alimentación del embrague hasta el cortacircuitos del procesador principal. Consulte los esquemas del Appendix C.
4.3 INTERRUPTOR DE PARADA DEL MOTOREl instalador suministra los interruptores de parada. Consulte la información suministrada con los interruptores de parada para la instalación del mismo.
ADVERTENCIA: TODAS LAS ESTACIONES DEBEN DISPONER DE UN MÉTODO PARA DETENER EL MOTOR, CONSULTE CFR 46, SEC. 62.35-5 Y ABYC P-24.5.8.

INSTALACIÓN
Página 34
4.4 SISTEMAS DE CONTROL
4.4.1 Sistema de control de las series 400, MC2000 o 700:Consulte la hoja de servicio estándar de variaciones de sistemas de control en el Appendix A para la instalación de sistemas de control. El único mazo de cables del sistema de control necesita una modificación en las conexiones del sistema de control. Consulte la figura de la hoja de servicio para ver las conexiones de 7 conductores del sistema de control.
4.4.2 Conjunto del sistema de control de la serie 500:Consulte el manual de instalación suministrado con el conjunto de sistema de control de la serie 500 para obtener instrucciones acerca de su instalación.

PROCEDIMIENTOS DE AJUSTE
Página 35
5.0 PROCEDIMIENTOS DE AJUSTENo se pueden incorporar al sistema todas las opciones disponibles. Lea las diferentes secciones que están relacionadas con la aplicación utilizada en esta embarcación. El procesador CruiseCommand dispone de algunas funciones que necesitan ajustarse para cada aplicación. Por favor, lea atentamente la información de cada una de las funciones antes de iniciar el ajuste de las mismas.
5.1 CÓMO ACTIVAR EL MODO DE AJUSTE Y CÓMO GUARDAR UN VALOR
F) Cuando se muestre el valor requerido, mantenga pulsado los botones con las flechas Arriba y Abajo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. El nuevo valor queda establecido en la memoria.
NOTA: PARA SALIR DEL PROCEDIMIENTO DE AJUSTE EN CUALQUIER MOMENTO SIN GUARDAR EL VALOR ALTERADO. PULSE EL BOTÓN CON LA FLECHA IZQUIERDA UNA VEZ. EL CÓDIGO DE FUNCIÓN DEJARÁ DE PARPADEAR Y LA FUNCIÓN SE GUARDARÁ CON EL VALOR ORIGINAL.
Figure 18: Pantalla de estado de funcionamiento normal
Figure 19: Pantalla de menú de funciones activado
Figure 20: Pantalla con procedimiento de ajuste activado
A)La pantalla se encuentra en estado de funcionamiento normal con líneas de guiones centrales rojos. (Véase Figure 18:)
B)Si pulsa el botón con las flechas Arriba o Abajo, se activará el menú de funciones. (Véase Figure 19:)
C)Si pulsa el botón con las flechas Arriba o abajo, podrá desplazarse a través del menú de funciones, de función en función.
D)Una vez que el código de función deseado aparece en la pantalla, mantenga pulsado los botones con las flechas Izquierda y Derecha al mismo tiempo para activar el ajuste. Las dos pantallas de la izquierda comenzarán a parpadear, indicando que el valor está listo para su sustitución. (Véase Figure 20:)
E)Si pulsa el botón con las flechas Arriba o Abajo, cambiará el valor de la función un número cada vez. Mantenga pulsado uno de los dos botones para desplazarse rápidamente a través de los valores.

PROCEDIMIENTOS DE AJUSTE
Página 36
G) Si pulsa el botón con las flechas Arriba o Abajo, podrá desplazarse a través de los códigos de función.
5.2 COMPONENTES DEL PROCESADOR UTILIZADOS DURANTE EL AJUSTE
5.2.1 Unidad de pantalla
5.2.2 Botones de flechas
Figure 21: Unidad de pantalla del procesador y botones de flechas
Cada procesador dispone de una unidad de pantalla y de botones de flechas situados en la cubierta delantera. (Véase Figure 21:)
• La unidad de pantalla sirve para visualizar los códigos de función y los valores, y consta de cuatro pantallas de 7 segmentos. (Consulte la sección 5.2.1).
• Los botones de flechas se utilizan para desplazarse y seleccionar los códigos de función y establecer los valores. (Consulte la sección 5.2.2).
La unidad de pantalla del procesador dispone de cuatro pantallas de 7 segmentos, que se iluminan para mostrar letras o números. Esta unidad de pantalla, durante el funcionamiento normal, muestra líneas de guiones rojos. (Véase Figure 22:)
Figure 22: Pantalla dividida en partes de 7 segmentos• Los primeros dos dígitos indican el código de
función, que es alfanumérico. • El segundo grupo de dos dígitos indica el valor
numérico que está programado actualmente en el procesador para esa función en concreto.
Un indicador decimal está ubicado en la esquina inferior derecha de cada panel. (Véase Figure 23:)
Figure 23: Pantalla de definiciones
El procesador tiene cuatro botones con flechas situados debajo de la pantalla. Estos botones se utilizan para desplazarse, seleccionar y guardar las funciones y valores. (Véase Figure 24:)
Figure 24: Botones de flechas del procesador
NOTA: CONSULTE LA SECCIÓN DE SOLUCIÓN DE PROBLEMAS PARA SABER QUÉ PASOS SEGUIR TRAS VISUALIZAR UN MENSAJE DE ERROR.
Arrow Keys

PROCEDIMIENTOS DE AJUSTE
Página 37
5.2.2.1 Flecha Arriba o AbajoPulsar una vez una de estas flechas. (Véase Figure 25:)
5.2.2.2 Flecha Izquierda y DerechaManténgalos pulsados simultáneamente. (Véase la Figure 26:)
5.2.2.3 Sólo flecha IzquierdaPulse una vez la flecha izquierda. (Véase Figure 27:)
5.2.2.4 Sólo flecha DerechaMantenga pulsada la flecha derecha. (Véase Figure 28:)
• Paradas Funcionamiento normal de la unidad de pantalla con líneas de guiones rojas. Activa el menú de funciones.
• En el menú de funciones, se desplaza por los tipos de función de una en una.
• Durante el modo de ajuste, se desplaza por los números de valor uno a uno.
• Cuando se muestra un código de error, se desplaza por los mensajes error uno a uno
Figure 25: Botones de flecha Arriba y Abajo
• Activa el modo de ajuste. Cuando el código de función de la unidad de pantalla comienza a parpadear, puede dejar de pulsar los botones.
• Guarda el valor y desactiva el modo de ajuste. Cuando el código de función de la unidad de pantalla deja de parpadear, puede dejar de pulsar los botones. En esos momentos, el sistema está fuera del modo de ajuste y en el menú de funciones.
Figure 26: Botones de flecha Izquierda y Derecha
• Salir del modo de ajuste sin guardar ningún cambio. El código de función dejará de parpadear y los valores guardados previamente se restaurarán.
• En el menú de funciones, muestra los códigos de error, en el caso de haya alguno guardado
Figure 27: Botón de flecha Izquierda
• Borra el código de error de la unidad de pantalla, si el error ya se ha resuelto. Debe soltar y volver a pulsar el botón para borrar varios errores.
Figure 28: Botón de flecha Derecha
• En el modo de ajuste, la unidad de pantalla muestra únicamente valores de dos dígitos. Para leer un parámetro que tenga un valor después del decimal,, mantenga pulsado el botón de la flecha Derecha. Consulte la Figure 29:
Figure 29: Pantalla con un valor que contiene más de dos dígitos
Blinking

PROCEDIMIENTOS DE AJUSTE
Página 38
5.3 FUNCIONES Y VALORES DE AJUSTE
La siguiente tabla enumera los diferentes códigos de función, el nombre de la función, el valor y el intervalo predeterminados. Cada función se explicará en una de las siguientes secciones. Los siguientes parámetros DEBEN ajustarse en el orden correcto:
• parámetro A1 DEBE ser el primer parámetro ajustado• parámetro A0 DEBE ser el segundo parámetro ajustado
Una vez se han establecido estos dos parámetros, inicie el ciclo de alimentación a los procesadores o espere cinco (5) minutos antes de continuar con el ajuste.
PRECAUCIÓN:Si se utilizan transmisiones ZF Hurth, ajuste el parámetro L1 como el primer ajuste después del parámetro A0.
Table 1: Lista de funcionesCódigo de función
Nombre de función Valor predeter-minado
Intervalo de valores u opciones
A1 Número de motoresESTA FUNCIÓN DEBE SER LA 1ª FUNCIÓN AJUSTADA
01 01 - Una sola hélice02 - Doble hélice
A0 Identificación del procesadorESTA FUNCIÓN DEBE SER LA 2ª FUNCIÓN AJUSTADA
00 01 ó 02 (cada procesador debe tener un número de identificación único)
L1 Función de la válvula de ralentización de motorESTA FUNCIÓN DEBE SER LA 3ª FUNCIÓN AJUSTADA SI SE UTILIZAN TRANSMISIONES ZF HURTH
00 00 - Normal, sin corriente cuando está desactivado
01 - Inversa, sin corriente cuando está desactivado
02 - Normal, sin corriente cuando está desactivado, predeterminado para sistemas ZF220 - 550 de 12 VCC
03 - Normal, sin corriente cuando está desactivado, predeterminado para sistemas ZF220 - 550 de 24 VCC
04 - Normal, sin corriente cuando está desactivado, predeterminado para sistemas ZF2000 de 24 VCC
05 - Inversa, sin corriente cuando está desactivado, predeterminado para sistemas de la serie ZF600, 1900 ó 2500 de 24 VCC.
06 - Predeterminado para sistemas ZF Hurth de 12 VCC.
07 - Predeterminado para sistemas ZF Hurth de 24 VCC.
FUNCIONES DEL PROCESADOR
A2 Funcionamiento con una palanca 01 00 - Desactivar01 - Activar
A3 SE (Extensor de estaciones) 00 00 - Desactivar01 - Activar
FUNCIONES DEL MOTOR *Los valores predeterminados del acelerador están basados en el perfil del acelerador seleccionado.

PROCEDIMIENTOS DE AJUSTE
Página 39
E0 Seleccione el perfil del acelerador del motor
06 01 Del 8 al 92% [PWM] (Caterpillar)02 De 0,9 a 4,5 VCC [Tensión] (Cummins Centry)03 De 0,9 a 4,0 VCC [Tensión] (Cummins Quantum)04 De 0,64 a 4,65 VCC [Tensión] (Detroit Diesel)05 De 4,0 a 20 mA [Corriente] (MTU, MAN)06 De 0,42 a 2,95 VCC [Tensión] (Scania)07 De 0,5 a 4,5 VCC [Tensión] (John Deere)08 0,6 - 3,6 VCC [Tensión] (Volvo)09 120,64 - 360,90 Hz [Frecuencia] Detroit Diesel 180010 120,64 - 463,50 Hz [Frecuencia] Detroit Diesel 2300
Código de función
Nombre de función Valor predeterminado
Intervalo de valores u opciones
FUNCIONES DEL MOTOR *Los valores predeterminados del acelerador están basados en el perfil del acelerador seleccionado.
E2 Acelerador al mínimo * Del 01,0 al 97,0%. Siempre estará un 3% por debajo del valor máximo.
E3 Acelerador al máximo * Del 04,0 al 100,0%. Siempre estará un 3% por encima del valor mínimo.
E4 Acelerador de popa al máximo 100.0 Del 1,0 al 100,0%
E5 Pausa del acelerador después del cambio
00.5 De 00,0 a 05,0 segundos.
E6 Ralentí alto 00.0 Del 00,0 al 20,0% del acelerador al máximo
E7 Sincronización activa 00 00 - Desactivada01 - Activada
FUNCIONES DEL EMBRAGUE
C0 Enclavamiento del aceite del embrague
00 00 - No instalado01 - Instalado02 - Modo de enclavamiento de presión del embrague del acelerador.
C1 Retardo del enclavamiento del aceite del embrague
01.0 De 00,5 a 10,0 segundos.
C2 Pausa de cambio de dirección 00 00 -Con marcha engranada; 01 - Punto muerto
C3 Tiempo de pausa de cambio de dirección
03 De 00 a 99 segundos.
C4 Relación de pausa de cambio de dirección
00 00 - 2:1 de proa a popa: De popa a proa01 -1:1 de proa a popa: De popa a proa
FUNCIONES DE LA RALENTIZACIÓN DEL MOTOR
L0 Posición de la palanca de ralentización del motor
00 00 - Sin ralentización del motor01 - 20 grados - Tipo 102 - 35 grados - Tipo 203 - 45 grados - Tipo 3
L2 Presión mínima de ralentización del motor
10.0 01.0- 99.0%. Siempre será menor/mayor (normal/cambio de dirección) que la ralentización máxima del motor, como mínimo, en un 1%.
L3 Presión máxima de ralentización del motor
25.0 02.0- 100.0%. Siempre será menor/mayor (normal/cambio de dirección) que la ralentización mínima del motor, como mínimo, en un 1%.
L4 Límite del acelerador de ralentización del motor
00 00 - 20% del acelerador al máximo
L5 Duración del impulso de ralentización del motor
00.6 00,0- 09,9 segundos. Momento en el que se ordena la ralentización para el porcentaje de impulso de la ralentización del motor cada vez que ésta se activa.
L6 Porcentaje del impulso de ralentización del motor
25.0 00.0 - 100.0%. Porcentaje de la corriente máxima de solenoide suministrada durante la duración del impulso de ralentización del motor.

PROCEDIMIENTOS DE AJUSTE
Página 40
L7 Porcentaje de inmovilización (sólo Hurth)
45 (L106)60 (L107)
00.0 - 100.0%. Porcentaje de inmovilización para transmisiones Hurth. Sólo se utiliza cuando las funciones L106 ó L107 están seleccionadas.
FUNCIONES DE SOLUCIÓN DE PROBLEMAS
H0 Diagnóstico 00 Tensión de entrada (+/- 0,5 VCC)
Frecuencia del sensor del cuentavueltas
Estación 1 Palanca A/D
Estación 2 Palanca A/D
Estación 3 Palanca A/D
Estación 4 Palanca A/D
Botón de transferencia, estaciones 1, 2, 3 y 4
Nivel de revisión de software
H1 Borrar EPROM 00 Guardar para borrar (sólo para personal autorizado)
H2 Detección de fallo de impulso en el lado alto
00 - 63 Activar estado de error

PROCEDIMIENTOS DE AJUSTE
Página 43
5.3.4 A2 - Funcionamiento con una palancaEste sistema utiliza el modo de funcionamiento con una palanca para permitir que la palanca del sistema de control dirija todos los motores y transmisiones a la misma velocidad y en el mismo sentido. La ventaja de esto es que sólo una palanca del sistema de control está activa en todo momento, lo que elimina la posibilidad de cambiar cuando las RPM del motor no están al ralentí.
Para cambiar el valor:A) Si pulsa el botón con las flechas Arriba o Abajo, se activará
el menú de funciones. B) Utilice los botones de flecha Arriba o Abajo para
desplazarse hasta el código de función A2.C) Active el modo de ajuste manteniendo pulsados al mismo
tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
5.3.5 A3 - Extensor de estaciones (SE)
El extensor de estaciones se utiliza únicamente cuando se necesitan de cinco (5) a (8) estaciones. Consulte el manual que acompaña al extensor de estaciones para saber cuáles son las conexiones necesarias.
Para cambiar el valor:A) Si pulsa el botón con las flechas Arriba o Abajo, se activará el
menú de funciones.
Los valores de esta función son00 Desactivar 01 Activar (valor predeterminado),
Figure 33: A2 Ajuste del funcionamiento con una palanca activado
NOTA: LOS EXTENSORES DE ESTACIONES SE NECESITAN EN UN PEQUEÑO PORCENTAJE DE APLICACIONES QUE UTILIZAN EL SISTEMA CRUISECOMMAND. POR LO TANTO, ESTE MANUAL NO SE EXTIENDE EN SU INSTALACIÓN Y AJUSTES. PARA OBTENER MÁS INFORMACIÓN ACERCA DEL EXTENSOR DE ESTACIONES, PÓNGASE EN CONTACTO CON SU REPRESENTANTE LOCAL DE ZF MATHERS.
Los valores de esta función son00 Desactivar (valor predeterminado), 01 Activar.
Figure 34: A3 Ajuste del extensor de estaciones activado

PROCEDIMIENTOS DE AJUSTE
Página 44
B) Utilice los botones de flecha Arriba o Abajo para desplazarse hasta el código de función A3.
C) Active el modo de ajuste manteniendo pulsados al mismo tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.

PROCEDIMIENTOS DE AJUSTE
Página 40
5.3.1 A1 - Número de motores
El número total de hélices debe introducirse en la memoria de cada uno de los procesadores. Todos los procesadores de una instalación deben tener el mismo valor introducido.
Para cambiar el valor:A) Pulse cualquier botón de flecha para detener las líneas de
guiones centrales en movimiento. B) Utilice los botones de flecha Arriba o Abajo para
desplazarse hasta el código de función A1.C) Active el modo de ajuste manteniendo pulsados al mismo
tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
5.3.2 A0 - Identificación del procesador
En aplicaciones en las que haya más de una hélice, el sistema debe disponer de algún método para determinar qué procesador utilizar. Cada procesador debe tener su propio número de identificación. En ningún momento pueden identificarse dos procesadores mediante el mismo número de identificación de procesador.
Para cambiar el valor:A) Pulse cualquier botón de flecha para detener las líneas de
guiones centrales en movimiento.
PRECAUCIÓN:Esta opción DEBE ser la PRIMERA opción introducida y ajustada. A0 debe ser la SEGUNDA opción introducida y ajustada.
Los valores de esta función son:01 Una sola hélice (valor predeterminado),02 Doble hélice,
Figure 30: A1 - Número de ajustes de motores activados
PRECAUCIÓN:Esta opción DEBE introducirse y ajustarse DESPUÉS de “A1” Número de motores. Si se utilizan transmisiones ZF Hurth, a continuación, ajuste el parámetro L1. Si no se utilizan las transmisiones ZF Hurth, el resto de opciones pueden introducirse y ajustarse en cualquier orden.
Los valores de esta función son 00 (valor predeterminado), 01, y 02.
Figure 31: Pantalla con A0 - Ajuste de identificación del procesador activado
Function Code is blinking

PROCEDIMIENTOS DE AJUSTE
Página 41
B) La pantalla debe ser similar a la que aparece en la Figure 31:. Se trata del primer código de la lista del menú de funciones y del código de función para la identificación del procesador.
C) Active el modo de ajuste manteniendo pulsados al mismo tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
5.3.3 L1- Función de la válvula de ralentización de motor
Normal (00)- (PREDETERMINADO) Una vez seleccionado, la corriente que llega a la válvula proporcional aumenta a medida que la presión del embrague aumenta. Cuando se selecciona el modo de bloqueo (presión máxima), la corriente baja hasta 0.
NOTA: ANTES DE CONTINUAR CON EL AJUSTE, ESPERE 5 MINUTOS O ACTIVE LA ALIMENTACIÓN.
PRECAUCIÓN: Si se utilizan transmisiones ZF Hurth, a continuación, ajuste el parámetro L1.
PRECAUCIÓN: Esta opción DEBE introducirse y ajustarse DESPUÉS de “A0” Identificación del procesador si se utilizan transmisiones ZF Hurth. El resto de opciones pueden introducirse y ajustarse en cualquier orden.
Consulte la Table 2: para seleccionar el ajuste correcto para la válvula de ralentización del motor utilizada en esta aplicación.La forma en la que se comporta la señal de corriente que llega a la válvula proporcional está determinada por esta función:
Figure 32: L1 Ajuste de la función de la válvula de ralentización del motor activada
Table 2: Selección del tipo L1 para la función de la válvula de ralentización del motor
Normal (00) Cambio de dirección (01) Normal (02)
ReintjesZF 550 e inferior
Serie Twin Disc 6000 ZF 600 y superior
ZF 220 - 550 12 VCC
Normal (03) Normal (04) Cambio de dirección (05)
ZF 220 - 550 24 VCC ZF 2000 24 VCC ZF 600, 1900, 2500 24 VCC
(06) (07)
ZF Hurth 12 VCC ZF Hurth 24 VCC
Function Code is blinking

PROCEDIMIENTOS DE AJUSTE
Página 42
Cambio de dirección (00)- Una vez seleccionado, la corriente que llega a la válvula proporcional aumenta a medida que la presión del embrague aumenta. Cuando se selecciona el modo de bloqueo (presión máxima), la corriente baja hasta 0.
Normal (00)- Una vez seleccionado, la corriente que llega a la válvula proporcional aumenta a medida que la presión del embrague aumenta. Cuando se selecciona el modo de bloqueo (presión máxima), la corriente baja hasta 0. Predeterminado para los sistemas ZF 220 - 550 12 VCC.
Normal (03)- Una vez seleccionado, la corriente que llega a la válvula proporcional aumenta a medida que la presión del embrague aumenta. Cuando se selecciona el modo de bloqueo (presión máxima), la corriente baja hasta 0. Predeterminado para los sistemas ZF 220 - 550 24 VCC.
Normal (04)- Una vez seleccionado, la corriente que llega a la válvula proporcional disminuye a medida que la presión del embrague aumenta. Cuando se selecciona el modo de bloqueo (presión máxima), la corriente baja hasta 0. Predeterminado para los sistemas de la serie ZF 2000 24 VCC.
Cambio de dirección (05)- Una vez seleccionado, la corriente que llega a la válvula proporcional disminuye a medida que la presión del embrague aumenta. Cuando se selecciona el modo de bloqueo (presión máxima), la corriente baja hasta 0. Predeterminado para los sistemas de las series ZF 600, 1900, o 2500 24 VCC.
(06)- Predeterminado para sistemas ZF Hurth de 12 VCC.(07)- Predeterminado para sistemas ZF Hurth de 24 VCC.
Para cambiar el valor:A) Si pulsa el botón con las flechas Arriba o Abajo, se activará
el menú de funciones. B) Utilice los botones de flecha Arriba o Abajo para
desplazarse hasta el código de función L1.C) Active el modo de ajuste manteniendo pulsados al mismo
tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.

PROCEDIMIENTOS DE AJUSTE
Página 43
5.3.4 A2 - Funcionamiento con una palancaEste sistema utiliza el modo de funcionamiento con una palanca para permitir que la palanca del sistema de control dirija todos los motores y transmisiones a la misma velocidad y en el mismo sentido. La ventaja de esto es que sólo una palanca del sistema de control está activa en todo momento, lo que elimina la posibilidad de cambiar cuando las RPM del motor no están al ralentí.
Para cambiar el valor:A) Si pulsa el botón con las flechas Arriba o Abajo, se activará
el menú de funciones. B) Utilice los botones de flecha Arriba o Abajo para
desplazarse hasta el código de función A2.C) Active el modo de ajuste manteniendo pulsados al mismo
tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
5.3.5 A3 - Extensor de estaciones (SE)
El extensor de estaciones se utiliza únicamente cuando se necesitan de cinco (5) a (8) estaciones. Consulte el manual que acompaña al extensor de estaciones para saber cuáles son las conexiones necesarias.
Para cambiar el valor:A) Si pulsa el botón con las flechas Arriba o Abajo, se activará el
menú de funciones.
Los valores de esta función son00 Desactivar 01 Activar (valor predeterminado),
Figure 33: A2 Ajuste del funcionamiento con una palanca activado
NOTA: LOS EXTENSORES DE ESTACIONES SE NECESITAN EN UN PEQUEÑO PORCENTAJE DE APLICACIONES QUE UTILIZAN EL SISTEMA CRUISECOMMAND. POR LO TANTO, ESTE MANUAL NO SE EXTIENDE EN SU INSTALACIÓN Y AJUSTES. PARA OBTENER MÁS INFORMACIÓN ACERCA DEL EXTENSOR DE ESTACIONES, PÓNGASE EN CONTACTO CON SU REPRESENTANTE LOCAL DE ZF MATHERS.
Los valores de esta función son00 Desactivar (valor predeterminado), 01 Activar.
Figure 34: A3 Ajuste del extensor de estaciones activado

PROCEDIMIENTOS DE AJUSTE
Página 44
B) Utilice los botones de flecha Arriba o Abajo para desplazarse hasta el código de función A3.
C) Active el modo de ajuste manteniendo pulsados al mismo tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.

PROCEDIMIENTOS DE AJUSTE
Página 45
5.3.6 E0 - Seleccione el perfil del acelerador del motorLos fabricantes de motores utilizan diferentes interfaces electrónicas para controlar la velocidad del motor. Para poder trabajar con los diferentes tipos de motores, el tipo de motor debe introducirse. Este valor, en combinación con el tipo de mazo de cables del acelerador, configura el perfil de salida del acelerador para que cumpla con las especificaciones de los diferentes motores.
Para cambiar el valor:A) Si pulsa el botón con las flechas Arriba o Abajo, se activará
el menú de funciones. B) Utilice los botones de flecha Arriba o Abajo para
desplazarse hasta el código de función E0.C) Active el modo de ajuste manteniendo pulsados al mismo
tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
5.3.7 E1 - Acelerador en punto muerto; E2 - Acelerador al mínimo; E3 - Acelerador al máximo; E-4 - Acelerador de popa al máximoEstas funciones se realizan durante los ajustes.
5.3.8 E5 - Pausa del acelerador después del cambioEste valor determina la cantidad de pausa desde el punto en el que se emite la señal de acoplamiento del embrague, hasta el punto en el que se permite el acelerador aumente a partir del ralentí.
Figure 35: E0 - Ajuste de selección de motor activado
Los valores de esta función son:01 = 8-92% [PWM] (Caterpillar)02 = de 0,9 a 4,5 VCC [tensión] (Cummins Centry)03 = de 0,9 a 4,0 VCC [tensión] (Cummins Quantum)04 = de 0,64 a 4,65 VCC [tensión] (Detroit Diesel)05 = de 4,0 a 20 mA [corriente] MTU, MAN)06 = de 0,42 a 2,95 VCC [tensión] (Scania) (valor
predeterminado)07 = de 0,5 a 4,5 VCC [tensión] (John Deere)08 = 0,6 - 3,6 VCC [tensión] (Volvo)09 = 120,64 - 360,90 Hz [frecuencia] (Detroit Diesel 1800)10 = 120,64 -463,50 Hz [frecuencia] (Detroit Diesel 2300)

PROCEDIMIENTOS DE AJUSTE
Página 46
Para cambiar el valor:A) Si pulsa el botón con las flechas Arriba o Abajo, se activará
el menú de funciones. B) Utilice los botones de flecha Arriba o Abajo para
desplazarse hasta el código de función E5.C) Active el modo de ajuste manteniendo pulsados al mismo
tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
5.3.9 E6 - Ralentí altoEsta función se realiza durante los ajustes y las comprobaciones. Consulte la sección 6.8.
5.3.10 E7 - Sincronización activaSincronización similar del acelerador
El método de sincronización predeterminado del sistema es Sincronización similar del acelerador. Con este tipo de sincronización, los procesadores aseguran que se aplicará la misma señal o una señal de mando similar de acelerador a los dos reguladores cuando se cumplan los criterios de sincronización. Aunque no se trate de una sincronización real, en la mayoría de los casos, este tipo de sincronización es muy eficaz.
Sincronización activaSi se necesita o se solicita una sincronización real, se deberá seleccionar la sincronización activa. Además, la sincronización activa requiere una señal de cuentavueltas significativa de las RPM de todos los motores. La frecuencia de estas señales se mide y cambia a las salidas de señales de mando del acelerador de los procesadores hasta que la frecuencia de ambos motores es la misma y los dos motores funcionan con las mismas RPM.
Los valores de esta función van desde 00,0 hasta 05,0 segundos.El valor predeterminado está ajustado como una pausa de 00,5 segundos.
Figure 36: E5 - Ajuste de pausa del acelerador activado

PROCEDIMIENTOS DE AJUSTE
Página 47
Para cambiar el valor:A) Si pulsa el botón con las flechas Arriba o Abajo, se activará
el menú de funciones. B) Utilice los botones de flecha Arriba o Abajo para
desplazarse hasta el código de función E7.C) Active el modo de ajuste manteniendo pulsados al mismo
tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
Los valores de esta función son:01 Activado 00 Desactivado (valor predeterminado).
Figure 37: E7 - Ajuste de sincronización activa activado

PROCEDIMIENTOS DE AJUSTE
Página 48
5.3.11 C0 - Enclavamiento del aceite del embrague
Este ajuste debe activarse solamente si el interruptor opcional de presión del aceite del embrague se utiliza con esta aplicación.
La función de este parámetro es permitir que el procesador sepa si un interruptor de presión del aceite del embrague está siendo utilizado o no y cómo reaccionará el procesador a la apertura o cierre del contacto del interruptor. La función principal del interruptor es la protección del conjunto del embrague. Si por cualquier razón no se alcanza la presión mínima de funcionamiento de seguridad o se pierde la presión al intentar controlar la transmisión de proa o popa con el acelerador elevado, el acelerador pasará a funcionar al ralentí. Esta opción protegerá el conjunto del embrague y evitará costosas reparaciones.
00 No instalado (valor predeterminado), [sin interruptor]01 Instalado - Cuando se selecciona este valor y se produce una
pérdida de presión del embrague durante la navegación, el acelerador recibirá la orden de pasar al ralentí después de que el tiempo retardo programado en (C1) “Retardo del enclavamiento del aceite del embrague” haya pasado. El acelerador su superará el nivel de ralentí si el contacto del interruptor se cierra después del tiempo de retardo, a menos que la palanca del sistema de control pase a la posición de bloqueo de proa o de popa antes de ordenar de nuevo un nivel por encima del ralentí en el acelerador.Si el interruptor de presión se cierra después de que se consuma el tiempo programado en (C1) “Retardo del enclavamiento del aceite del embrague”, el acelerador subirá por encima del nivel de ralentí para el tiempo especificado en (C1) antes de regresar al ralentí. La palanca del sistema de control debe regresar a la posición de bloqueo de proa o popa para aumentar la velocidad por encima del nivel de ralentí (asumiendo que el interruptor de presión se encuentre cerrado).
02 Instalado - Cuando se selecciona este valor y se produce una pérdida de presión del embrague durante la navegación, el acelerador recibirá la orden de pasar al ralentí después de que el tiempo retardo programado en (C1) “Retardo del enclavamiento del aceite del embrague” haya pasado. Cuando se cierre el contacto del interruptor, el acelerador
Figure 38: C0 - Ajuste de enclavamiento del aceite del embrague
activado
Los valores de esta función son:00 No instalado (valor predeterminado), [sin interruptor]01 Instalado, [interruptor utilizado, debe regresar a la posición
de bloqueo]02 Modo de enclavamiento de presión del embrague del
acelerador [interruptor utilizado, el acelerador regresará una vez que se cierre el interruptor]
Function Code is blinking

PROCEDIMIENTOS DE AJUSTE
Página 49
regresará a las RPM ordenadas (no tiene que desplazar la palanca del sistema de control a la posición de bloqueo de proa o popa).Si el interruptor de presión se cierra después de que se consuma el tiempo programado en (C1) “Retardo del enclavamiento del aceite del embrague”, el acelerador subirá por encima del nivel de ralentí y permanecerá en esa posición mientras el interruptor de presión permanezca cerrado.
El valor “02” se recomienda para cajas de cambios que necesiten más de 10 segundos para alcanzar la presión de funcionamiento.Para cambiar el valor:
A) Si pulsa el botón con las flechas Arriba o Abajo, se activará el menú de funciones.
B) Utilice los botones de flecha Arriba o Abajo para desplazarse hasta el código de función “C0”.
C) Active el modo de ajuste manteniendo pulsados al mismo tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
5.3.12 C1 - Retardo del enclavamiento del aceite del embragueEste ajuste debe utilizarse solamente si el interruptor opcional de presión del aceite
del embrague se utiliza con esta aplicación.
Esta función se utiliza junto con el enclavamiento del aceite del embrague (C0). El valor introducido determina la velocidad a la que el sistema responde a un situación de presión de aceite de cambio baja. El sistema responderá a la presión baja reduciendo la señal de control del acelerador a ralentí.
Para cambiar el valor:A) Si pulsa el botón con las flechas Arriba o Abajo, se activará
el menú de funciones.
Los valores de esta función van desde 00,5 hasta 10,0 segundos.El valor predeterminado está ajustado como un retardo de 01,0 segundos.
Figure 39: C1 - Ajuste de retardo del enclavamiento del aceite del embrague activado

PROCEDIMIENTOS DE AJUSTE
Página 50
B) Utilice los botones de flecha Arriba o Abajo para desplazarse hasta el código de función C1.
C) Active el modo de ajuste manteniendo pulsados al mismo tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
5.3.13 C2 - Pausa de cambio de direcciónAl realizar un cambio de dirección en la embarcación, se introduce una pausa en la señal de control del embrague para dar tiempo a que las RPM de los motores bajen hasta llegar al ralentí y para que disminuya la velocidad de la embarcación en el agua. Si esta pausa se produce mientras el embrague está accionado o en punto muerto puede seleccionarse con esta función.
Para cambiar el valor:A) Si pulsa el botón con las flechas Arriba o Abajo, se activará
el menú de funciones. B) Utilice los botones de flecha Arriba o Abajo para
desplazarse hasta el código de función C2.C) Active el modo de ajuste manteniendo pulsados al mismo
tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
5.3.14 C3 - Tiempo de pausa de cambio de direcciónLa opción de tiempo de pausa de cambio de dirección proporciona una deceleración del motor, seguida de una pausa en el acelerador
Los valores de esta función son:00 Transmisión accionada (valor predeterminado).01 Punto muerto.
Figure 40: C2 - Ajuste de pausa de cambio de dirección activado
Function Code is blinking

PROCEDIMIENTOS DE AJUSTE
Página 51
para lograr la velocidad solicitada en la nueva dirección deseada, en un cambio de dirección a máxima velocidad. Este tiempo de pausa es proporcional a la cantidad de aceleración solicitada y a su duración. Para crear el ajuste del valor de pausa, la embarcación debe estar a máxima velocidad y a proa, seis veces la pausa establecida. La pausa predeterminada de popa a proa es la mitad del ajuste del valor de pausa de cambio de dirección.Cuando C2 Pausa de cambio de dirección está ajustado como 00, la posición del acelerador cae hasta ralentí y la transmisión permanece accionada a proa, la pausa que le sigue es proporcional a la posición de la palanca del sistema de control anterior y el tiempo que la palanca ha permanecido en esa posición antes del cambio de dirección.
Para cambiar el valor:A) Si pulsa el botón con las flechas Arriba o Abajo, se activará
el menú de funciones. B) Utilice los botones de flecha Arriba o Abajo para
desplazarse hasta el código de función C3.C) Active el modo de ajuste manteniendo pulsados al mismo
tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
5.3.15 C4 - Relación de pausa de cambio de dirección 00 - 2:1 Relación
Éste es el ajuste predeterminado y determina cómo se aplica el valor establecido en la función de tiempo de pausa de cambio de dirección (C3). El número de segundos seleccionado es solamente para maniobras de proa a popa. Una maniobra de popa a proa necesitará la mitad del tiempo de pausa de cambio de dirección. Se trata de la selección habitual, ya que la mayoría de las embarcaciones no alcanzan la misma aceleración a popa que a proa. Por lo tanto, el tiempo necesario para obtener una
Los valores de esta función van desde 00 hasta 99 segundos.El valor predeterminado está ajustado como una pausa de 03 segundos.
Figure 41: C3 - Ajuste de tiempo de pausa de cambio de dirección activado
Function Code is blinking

PROCEDIMIENTOS DE AJUSTE
Página 52
velocidad suficiente en el agua para un cambio de dirección seguro es significativamente inferior.
01 -1:1 RelaciónCuando este ajuste se ha seleccionado, el valor establecido como tiempo de pausa de cambio de dirección (C3) es el mismo para las maniobras de proa a popa que para las maniobras de popa a proa. Esta opción puede seleccionarse cuando la embarcación alcance la misma velocidad en el agua en ambas direcciones, como es el caso de un Ferry de doble extremo. Otra aplicación en la que puede seleccionarse esta opción sería el control de un propulsor de proa o popa.
Para cambiar el valor:A) Si pulsa el botón con las flechas Arriba o Abajo, se activará
el menú de funciones. B) Utilice los botones de flecha Arriba o Abajo para
desplazarse hasta el código de función C4.C) Active el modo de ajuste manteniendo pulsados al mismo
tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
Los valores de esta función son:00 2:1 (valor predeterminado), 01 1:1.
Figure 42: C4 - Ajuste de relación de pausa de cambio de dirección activado

PROCEDIMIENTOS DE AJUSTE
Página 53
5.3.16 L0 - Posición de la palanca de ralentización del motor
Consulte la sección 2.10.2 para los tipos de modo de ralentización del motor y selecciona el tipo de modo de ralentización del motor necesario para esta aplicación. Para cambiar el valor:
A) Si pulsa el botón con las flechas Arriba o Abajo, se activará el menú de funciones.
B) Utilice los botones de flecha Arriba o Abajo para desplazarse hasta el código de función L0.
C) Active el modo de ajuste manteniendo pulsados al mismo tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
5.3.17 L2 - Presión mínima de ralentización del motor; L3 - Presión máxima de ralentización del motor, L4 - Límite del acelerador de ralentización del motor; L5 - Duración de impulso de ralentización del motor; L6 - Porcentaje de impulsos de ralentización del motorEstas funciones se realizan durante los ajustes y las comprobaciones. Consulte la sección 6.0.
5.3.18 L7 - Porcentaje de inmovilización (sólo Hurth)Esta función controla la cantidad de corriente mientras la transmisión está bloqueada y la ralentización del motor
Figure 43: L0 - Ajuste de la posición de la palanca de ralentización del
motor activado
Los diferentes tipos de ralentización del motor:• 00 = Sin válvula de ralentización (consulte la
sección 2.10.1.1 para conocer el funcionamiento) (valor predeterminado)
• 01 = Tipo 1 - control de ralentización del motor de 20 grados (consulte la sección 2.10.1.2 para su funcionamiento)
• 02 = Tipo 2 - control de ralentización del motor de 35 grados (consulte la sección 2.10.1.2 para su funcionamiento)
• 03 = Tipo 3 - control de ralentización del motor de 45 grados (consulte la sección 2.10.1.2 para su funcionamiento)
Function Code is blinking

PROCEDIMIENTOS DE AJUSTE
Página 54
desactivada. Los valores preseleccionados se utilizan si se usan L106 o L107.Intervalo de función: 0.0 - 100.0%Valores preseleccionados: 45 para 12 VCC (L106); 60 para 24 VCC (L107)

PROCEDIMIENTOS DE AJUSTE
Página 54
5.3.19 H0 - DiagnósticoEsta función se utiliza para la solución de problemas.
5.3.20 H1 - Borrar EPROMEsta función se utiliza para la realización de ajustes o la solución de problemas. (SÓLO para su uso por parte de personal autorizado)
5.3.21 H2 - Activar error en propulsión del lado altoLos cinco propulsores utilizados para controlar los solenoides del embrague y de ralentización del motor pueden controlarse. Puede detectarse la presencia de un circuito abierto o de un cortocircuito. El instalador debe programar el sistema de forma que el software de detección de fallos se activa para los propulsores deseados.
Para cambiar el valor:A) Si pulsa el botón con las flechas Arriba o Abajo, se activará
el menú de funciones. B) Utilice los botones de flecha Arriba o Abajo para
desplazarse hasta el código de función H2.C) Active el modo de ajuste manteniendo pulsados al mismo
tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
La función de error en el propulsor del lado alto se ajusta en fábrica para 00 sin activar la detección de error en propulsor.
Figure 44: H2 Ajuste de la función de error en propulsión del lado alto activado
NOTA: EL “VALOR” DEBERÍA INTRODUCIRSE PARA EL SOLENOIDE CORRESPONDIENTE QUE ESTÉ EN USO Y QUE NECESITE UN SEGUIMIENTO
Table 3: Activar estado de error del solenoide
Proa Popa Punto muertoControl de
ralentización del motor
Activación/desactivación de la ralentización
del motor
Valor
0 0 0 0 0 00
1 0 0 0 0 01
Function Code is blinking

PROCEDIMIENTOS DE AJUSTE
Página 55
Proa Popa Punto muertoControl de
ralentización del motor
Activación/desactivación de la ralentización
del motor
Valor
0 1 0 0 0 02
1 1 0 0 0 03
0 0 1 0 0 04
1 0 1 0 0 05
0 1 1 0 0 06
1 1 1 0 0 07
0 0 0 1 0 08
1 0 0 1 0 09
0 1 0 1 0 10
1 1 0 1 0 11
0 0 1 1 0 12
1 0 1 1 0 13
0 1 1 1 0 14
1 1 1 1 0 15
0 0 0 0 1 16
1 0 0 0 1 17
0 1 0 0 1 18
1 1 0 0 1 19
0 0 1 0 1 20
1 0 1 0 1 21
0 1 1 0 1 22
1 1 1 0 1 23
0 0 0 1 1 24
1 0 0 1 1 25
0 1 0 1 1 26
1 1 0 1 1 27
0 0 1 1 1 28
1 0 1 1 1 29
0 1 1 1 1 30
1 1 1 1 1 31
Table 3: Activar estado de error del solenoide

AJUSTES Y COMPROBACIONES (AMARRADOS AL MUELLE)
Página 56
6.0 AJUSTES Y COMPROBACIONES (AMARRADOS AL MUELLE)
6.1 SISTEMA DE CONTROL (CON LOS MOTORES PARADOS)A) Active la alimentación en el sistema de control.B) El sistema de control de mano de cada una de las estaciones
emitirá un tono intermitente.C) Tome el mando en una estación remota. D) Siga los siguientes pasos en todos los sistemas de control.
1. Coloque las palancas del sistema de control en la posición de bloqueo de punto muerto.
2. Mantenga pulsado el botón de transferencia de la estación. 3. Desplace todas las palancas del sistema de control hasta la
posición de bloqueo de proa antes de soltar el botón de transferencia.
4. El indicador rojo del sistema de control debería parpadear, indicando que el CruiseCommand ha pasado al modo de calentamiento. El modo de calentamiento funcionasólo en la dirección de proa. • Si el indicador rojo parpadea, continúe la comprobación del
sistema de control• Si el indicador rojo no parpadea, compruebe las conexiones tal
y como se detalla en el Appendix A de la Hoja de servicio del sistema de control.
E) ENCLAVAMIENTO DEL MOTOR DE ARRANQUE (CON LOS MOTORES PARADOS)
A) Desactivación de la alimentación CC del CruiseCommand.• Compruebe que el/los motor(es) no se ponen en marcha.
B) Activación de la alimentación CC del CruiseCommand. No tome el control desde una estación.
• Compruebe que el/los motor(es) no se ponen en marcha. C) Tome el mando en una estación. Coloque la(s) palanca(s) del
sistema de control al 50% de aceleración.• Compruebe que el/los motor(es) no se ponen en marcha.
ADVERTENCIA: DESACTIVE LA ALIMENTACIÓN DEL SISTEMA DE CONTROL ANTES DE LLEVAR A CABO LA DESCONEXIÓN DE LAS BATERÍAS. NO DESCONECTE LOS TERMINALES DE LA BATERÍA MIENTRAS EL MOTOR ESTÉ EN FUNCIONAMIENTO.
NOTA: SI FALLA ALGUNA DE LAS SIGUIENTES COMPROBACIONES, VERIFIQUE LA INSTALACIÓN DEL SISTEMA DE ENCLAVAMIENTO DEL MOTOR DE ARRANQUE O SUS CONEXIONES, TAL Y COMO SE MUESTRA EN EL DIBUJO DEL Appendix C Y EN LA SECCIÓN 4.2.1.2.

AJUSTES Y COMPROBACIONES (AMARRADOS AL MUELLE)
Página 57
D) Coloque la(s) palanca(s) del sistema de control en la posición de punto muerto/ralentí (vertical). Tome el mando en una estación.
• Compruebe que el/los motor(es) arrancan en esta posición.

AJUSTES Y COMPROBACIONES (AMARRADOS AL MUELLE)
Página 57
6.2 USO DE LA UNIDAD DE PRUEBA DE SERVICIO IN SITU (CUADRO DE INICIO) Y MULTÍMETRO
Consulte el Appendix A - MM13927 Manual para más información acerca del uso de la unidad de prueba de servicio in situ (cuadro de inicio).
Table 4: Funciones que requieren el uso de la unidad de prueba de servicio in situ y del multímetroE1E2E3E4E6
L2L3L4L7
Acelerador en punto muerto (sección 6.6)Acelerador al mínimo (sección 6.3)Acelerador al máximo (sección 6.3)Acelerador de popa al máximo (sección 6.7)Ralentí alto (sección 6.8)
Ralentización del motor al mínimo (sección 7.3)Ralentización del motor al máximo (sección 7.3)Límite del acelerador de ralentización del motor (sección 7.4)Porcentaje de inmovilización (sólo Hurth) (sección 6.9)
Para las funciones E1, E2, E3, E4, E6 y L4, conecte el conector de 8 pines de la unidad de prueba de servicio in situ al conector del acelerador del procesador y al mazo de cables del acelerador.
Figure 45: Conexiones E1, E2, E3, E4, E6, L4 del procesador, unidad de prueba y multímetro.
Para las funciones L2, L3 y L7, conecte el conector de 12 pines de la unidad de prueba de servicio in situ al conector del embrague del procesador y al mazo de cables del embrague.
Figure 46: Conexiones L2, L3 y L7 del procesador, unidad de prueba y multímetro

AJUSTES Y COMPROBACIONES (AMARRADOS AL MUELLE)
Página 58
6.3 E-2 ACELERADOR AL MÍNIMO Y E-3 SEÑAL DE ACELERADOR AL MÁXIMO (CON LOS MOTORES PARADOS)
PUEDE QUE NO SE NECESARIO REALIZAR AJUSTES. Verifique los valores existentes de acelerador al mínimo y al máximo antes de
ajustarlos.
Acelerador al mínimo (E2)Esta función permite al instalador la capacidad de ajustar la señal del acelerador al ralentí, por encima y por debajo del perfil establecido en la selección del perfil de acelerador del motor. Esta valor puede ajustarse en cualquier punto entre el 1 y el 97% de la salida de capacidad máxima del sistema de propulsión. El valor debe ser, como mínimo, un 3% menor que el ajuste de acelerador al máximo.
Acelerador al máximo (E3)Esta función permite al instalador la capacidad de ajustar la señal del acelerador a máxima potencia, por encima y por debajo del perfil establecido en la selección del perfil de acelerador del motor. Esta valor puede ajustarse en cualquier punto entre el 4 y el 100% de la salida de capacidad máxima del sistema de propulsión. El valor debe ser, como mínimo, un 3% mayor que el ajuste de acelerador al mínimo.
6.3.1 Ajustes del aceleradorUtilice la unidad de prueba de servicio in situ y un multímetro:
A) Desconecte el mazo de cables del acelerador del procesador.B) Conecte el conector de 8 pines de la unidad de prueba de
servicio in situ al conector del acelerador del procesador y al mazo de cables del acelerador. Consulte la Figure 46:.
C) Dependiendo del tipo de señal necesaria, siga la columna adecuada de la Table 5:.
NOTA: LA SINCRONIZACIÓN DEPENDE DE QUE LOS AJUSTES DE ACELERADOR AL MÍNIMO Y AL MÁXIMO SEAN IGUALES PARA TODOS LOS PROCESADORES.
NOTA: ANTES DE REALIZAR LOS AJUSTES, DEBE REALIZARSE UNA SELECCIÓN CORRECTA DE SEÑALES DEL MOTOR TAL Y COMO SE MUESTRA EN LA SECCIÓN 5.3.6.

AJUSTES Y COMPROBACIONES (AMARRADOS AL MUELLE)
Página 59
D) Active la alimentación del ECM del motor. Asegúrese de que la alimentación está activada para el procesador.
E) Si pulsa el botón con las flechas Arriba o Abajo, se activará el menú de funciones.
F) Utilice los botones de flecha Arriba o Abajo para desplazarse por los códigos de función E2 o E3, dependiendo de si se ha ajustado el acelerador al mínimo o al máximo.
• El multímetro leerá la señal de salida, dependiendo del código de función introducido en el procesador. E3 para acelerador al mínimo, E4 para acelerador al máximo.
Table 5: Ajustes de PWM, tensión y salida de corriente del acelerador
P W M (rég im en d e tra b a jo ) Ten sió n (V C C ) C o rr ien te (m A ) F rec u en c ia (H z)
1) Establezca el multímetro al ajuste de régimen de trabajo.
1) Establezca el multímetro al ajuste de tensión.
1) Establezca el multímentro como amperímentro.
1) Establezca el multímetro al ajuste de frecuencia.
2) En el multímetro, conecte el terminal negro a COM y el terminal rojo a V.
2) En el multímetro, conecte el terminal negro a COM y el terminal rojo a V.
2) En el multímetro, conecte el terminal negro a COM y el terminal rojo a mA.
2) En el multímetro, conecte el terminal negro a COM y el terminal rojo a V.
P W M (rég im en d e tra b a jo ) Ten sió n (V C C ) C o rr ien te (m A ) F recu en c ia
3) Conecte el terminal negro del multímetro al polo negativo (-) y el terminal rojo al PWM.
3) Conecte el terminal negro del multímetro al polo negativo (-) y el terminal rojo al VCC.
3) Conecte el terminal negro del multímetro al polo negativo (-) y el terminal rojo a mA.
3) Conecte el terminal negro del multímetro al polo negativo (-) y el terminal rojo a Frecuencia.
Figure 48: E2 - Acelerador al mínimo y E3 - Ajuste activado de acelerador al máximo
NOTA: PARA LEER LA CORRIENTE, EL BOTÓN MA DE LA UNIDAD DE PRUEBA DE SERVICIO IN SITU DEBE PULSARSE.
%
VDC mA Hz

AJUSTES Y COMPROBACIONES (AMARRADOS AL MUELLE)
Página 60
G) Active el modo de ajuste manteniendo pulsados al mismo tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
H) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
I) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
J) Retire la unidad de prueba de servicio in situ y vuelva a conectar el mazo de cables del acelerador al procesador.
NOTA: EN MODO DE AJUSTE PARA MOSTRAR LOS VALORES QUE TIENEN MÁS DE DOS DÍGITOS (EJEMPLO: 010.5) MANTENGA PULSADO EL BOTÓN DE FLECHA DERECHA. EL CÓDIGO DE FUNCIÓN DESAPARECERÁ Y SERÁ SUSTITUIDO POR EL VALOR DE TRES O CUADRO DÍGITOS. EL INDICADOR DECIMAL SE ILUMINARÁ SI EL N∨ MERO TIENE UN VALOR DECIMAL. AL SOLTAR EL BOTÓN DE FLECHA DERECHA, LA PANTALLA VOLVERÁ A MOSTRAR EL CÓDIGO DE FUNCIÓN NORMAL PARPADEANDO Y EL VALOR DE DOS DÍGITOS.

AJUSTES Y COMPROBACIONES (AMARRADOS AL MUELLE)
Página 61
6.4 COMPROBACIÓN DE INTERRUPTORES DE PARADA DEL MOTOR (CON LOS MOTORES EN MARCHA)A) Arranque el/los motor(es).B) Compruebe que todos los interruptores de parada del motor
funcionan correctamente en todas las estaciones. Consulte la información que suministra el fabricante del motor o el distribuidor del interruptor para su instalación y ajustes.
6.5 COMPROBACIÓN DEL MODO DE CALENTAMIENTO (MOTORES EN FUNCIONAMIENTO)
A) Coloque la(s) palanca(s) del sistema de control en la posición de punto muerto.
B) Mantenga pulsado el botón de transferencia de la estación. C) Desplace la(s) palanca(s) del sistema de control hasta la posición
de bloqueo de proa.D) Deje de pulsar el botón de transferencia de estación.
• Si el indicador rojo parpadea, el modo de calentamiento estará activado. Continúe con los ajustes y las pruebas.
• Si el indicador no parpadea, compruebe si todas las conexiones son correctas. Realice todos los cambios necesarios y, a continuación, repita esta sección.
PRECAUCIÓN:Es absolutamente obligatorio tener un interruptor de parada de motor en cada estación. Consulte el CFR 46, Sec. 62.35-5 y ABYC P-24.5.8.
ADVERTENCIA: NO INTENTE SEGUIR CON LAS COMPROBACIONES HASTA QUE LOS INTERRUPTORES DE PARADA DE LOS MOTORES FUNCIONEN CORRECTAMENTE.
NOTA: UTILICE EL MODO DE CALENTAMIENTO EN PUNTO MUERTO EN CADA UNO DE LOS MOTORES EN CADA UNA DE LAS ESTACIONES, UN ∨ NICO MOTOR EN CADA OCASIÓN, PARA CONFIRMAR EL CONTROL DE VELOCIDAD.

AJUSTES Y COMPROBACIONES (AMARRADOS AL MUELLE)
Página 62
6.6 E1 - ACELERADOR EN PUNTO MUERTO
El motor Cummins-Quantum requiere señales de control del acelerador diferentes en punto muerto que cuando tiene engranada la transmisión. Estos motores necesitan una señal de tensión del acelerador de 0,9 VCC cuando se descarga en punto muerto. Cuando se coloca una carga sobre el motor al accionar el embrague, la señal de control del acelerador aumenta hasta 1,2 VCC. El acelerador en función de punto muerto permite al instalador la posibilidad de ajustar el nivel de la señal del acelerador en punto muerto/ralentí y también ajusta el segundo nivel de señal del acelerador para cuando se acciona el embrague. El valor de punto muerto puede ajustarse en cualquier punto entre 1 y 20% de la capacidad máxima de salida del acelerador del circuito de tensión. Por ejemplo; si el circuito tiene la capacidad de obtener de 0 a 5,00 VCC y el valor introducido es 10, la salida en punto muerto sería 0,50 VCC.
A) Desconecte el mazo de cables del acelerador del procesador CruiseCommand.
B) Conecte el conector de 8 pines de la unidad de prueba de servicio in situ al conector del acelerador del procesador y al mazo de cables del acelerador. Consulte la Figure 46:
C) Active la alimentación del ECM del motor. Asegúrese de que la alimentación está activada para el procesador.
D) Si pulsa el botón con las flechas Arriba o Abajo, se activará el menú de funciones.
E) Utilice los botones de flecha Arriba o Abajo para desplazarse hasta el código de función E1.• El multímetro leerá la señal de salida para el acelerador en
punto muerto. F) Active el modo de ajuste manteniendo pulsados al mismo
tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
NOTA: ESTA FUNCIÓN SÓLO SE UTILIZA CUANDO LA FUNCIÓN E0 SELECCIONAR PERFIL DEL ACELERADOR DEL MOTOR ESTÁ AJUSTADO PARA 03 - CUMMINS QUANTUM.
Los valores de esta función van desde el 01,0% al 50,0%. Los valores predeterminados están basados en el perfil del acelerador seleccionado.
Figure 49: E1 - Ajuste del acelerador en punto muerto activado
Function Code is blinking

AJUSTES Y COMPROBACIONES (AMARRADOS AL MUELLE)
Página 63
G) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
H) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
I) Retire la unidad de prueba de servicio in situ y vuelva a conectar el mazo de cables del acelerador al procesador

AJUSTES Y COMPROBACIONES (AMARRADOS AL MUELLE)
Página 64
6.7 E4 - ACELERADOR DE POPA AL MÁXIMO
Este valor determina el porcentaje de acelerador al máximo que se permite en popa. Este valor puede ajustarse en cualquier punto entre el 1 y el 100%.Los valores de esta función van desde el 1,0% al 100,0%. Los valores predeterminados están basados en el perfil del acelerador seleccionado.
A) Desconecte el mazo de cables del acelerador del procesador CruiseCommand.
B) Conecte el conector de 8 pines de la unidad de prueba de servicio in situ al conector del acelerador del procesador y al mazo de cables del acelerador. Consulte la Figure 46:.
C) Active la alimentación del ECM del motor. Asegúrese de que la alimentación está activada para el procesador.
D) Si pulsa el botón con las flechas Arriba o Abajo, se activará el menú de funciones.
E) Utilice los botones de flecha Arriba o Abajo para desplazarse hasta el código de función E4.
• El multímetro leerá la señal de salida para el acelerador de popa al máximo.
F) Active el modo de ajuste manteniendo pulsados al mismo tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
G) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
H) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
I) Retire la unidad de prueba de servicio in situ y vuelva a conectar el mazo de cables del acelerador al procesador.
Figure 50: E4 - Ajuste del acelerador de popa al máximo activado
NOTA: PARA LEER LA CORRIENTE, EL BOTÓN MA DE LA UNIDAD DE PRUEBA DE SERVICIO IN SITU DEBE PULSARSE.

AJUSTES Y COMPROBACIONES (AMARRADOS AL MUELLE)
Página 65
6.8 E6 - RALENTÍ ALTO
Esta función permite al operador la opción de disponer de una segunda velocidad de ralentí elevado. Este segundo ralentí elevado puede ajustarse desde el 0 hasta el 20% de la aceleración máxima. Si se selecciona 0, el ralentí alto será el mismo que el normal o el ralentí bajo, que es el valor predeterminado. Cuando se aplica alimentación por primera vez al sistema, la aceleración solicitada es baja. Para aumentar las RPM hasta alcanzar el ralentí alto, el botón de transferencia debe pulsarse durante medio segundo y soltarlo. Esto puede realizarse con la palanca del sistema de control en la posición de control de proa, punto muerto o popa.Los valores de esta función van desde el 0 al 20% del acelerador al máximo. El valor predeterminado está ajustado como 00.
A) Desconecte el mazo de cables del acelerador del procesador.B) Conecte el conector de 8 pines de la unidad de prueba de
servicio in situ al conector del acelerador del procesador y al mazo de cables del acelerador. Figure 46:
C) Active la alimentación del ECM del motor. Asegúrese de que la alimentación está activada para el procesador.
D) Si pulsa el botón con las flechas Arriba o Abajo, se activará el menú de funciones.
F) Active el modo de ajuste manteniendo pulsados al mismo tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
G) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
H) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
E) Utilice los botones de flecha Arriba o Abajo para desplazarse hasta el código de función E6.• El multímetro leerá la señal de salida para
ralentí.Figure 51: E6 - Ajuste de ralentí alto activado
NOTA: PARA LEER LA CORRIENTE, EL BOTÓN MA DE LA UNIDAD DE PRUEBA DE SERVICIO IN SITU DEBE PULSARSE.

AJUSTES Y COMPROBACIONES (AMARRADOS AL MUELLE)
Página 66
I) Retire la unidad de prueba de servicio in situ y vuelva a conectar el mazo de cables del acelerador al procesador.

AJUSTES Y COMPROBACIONES (AMARRADOS AL MUELLE)
Página 66
6.9 L7 - PORCENTAJE DE INMOVILIZACIÓN (SÓLO HURTH)L7 es únicamente para su uso con los ajustes L106 o L107.L7 ajusta la cantidad de corriente en el modo de bloqueo (sin ralentización del motor). Consulte el manual de la transmisión para un ajuste de corriente máxima.Si se selecciona el ajuste L106 o L107, L7 cambiará de forma automática a los valores calculados en fábrica.Si se necesitase alterar este ajuste, debe medirse la corriente con un multímetro.
Para cambiar el valor:A) Si pulsa el botón con las flechas Arriba o Abajo, se activará
el menú de funciones. B) Utilice los botones de flecha Arriba o Abajo para
desplazarse hasta el código de función L7.C) Active el modo de ajuste manteniendo pulsados al mismo
tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
Figure 52: L4 - Ajuste del límite del acelerador de ralentización del motor activado

AJUSTES Y COMPROBACIONES (DURANTE LA NAVEGACIÓN)
Página 67
7.0 AJUSTE DURANTE LA NAVEGACIÓN
7.1 RPM DEL MOTOR
A) Utilice el modo de calentamiento para calentar el/los motor(es). B) En aguas abiertas, desplace gradualmente la palanca del sistema
de control a la posición de máxima velocidad. El/los motor(es) deberían funcionar a las RPM máximas establecidas.
C) Si necesita realizarse un ajuste de la aceleración máxima, consulte la sección 6.3, page 58.
7.2 PAUSA EN LA INVERSIÓN PARA UN CAMBIO DE DIRECCIÓN
Esta opción permite la deceleración del motor y una disminución de la velocidad de la embarcación en un cambio de dirección a alta velocidad. Dependiendo del ajuste de C2, el ajuste del acelerador cae hasta llegar al ralentí y la transmisión permanece accionada o cambia a punto muerto durante esta pausa. Consulte las secciones 5.3.13, 5.3.14 y 5.3.15 para ajustes relacionados con la pausa de cambio de dirección.
ADVERTENCIA: NO INTENTE ACCIONAR EL SISTEMA CRUISECOMMAND LEJOS DEL MUELLE SI EL SISTEMA PRESENTA CUALQUIER ANOMALÍA. COMPRUEBE QUE TODAS LAS COMPROBACIONES ANTERIORES HAYAN SIDO EFECTUADAS Y SEAN CORRECTAS.
PRECAUCIÓN: Arranque despacio y compruebe que el toque de encendido que proporciona el sistema CruiseCommand es rápido y preciso.

AJUSTES Y COMPROBACIONES (DURANTE LA NAVEGACIÓN)
Página 68
7.3 AJUSTES L2 Y L3 DE RALENTIZACIÓN MÁXIMA Y MÍNIMA DEL MOTOR (CON LOS MOTORES EN FUNCIONAMIENTO)
Presión mínima de ralentización del motor (L2)La cantidad de corriente suministrada a la válvula proporcional cuando se desea la presión mínima se establece mediante esta función. Puede ajustarse en cualquier punto entre 01,0% y 99,0% de la capacidad total de salida de corriente del circuito. El valor establecido debe ser, como mínimo, un 1% menor o mayor (dependiendo de si se ha seleccionado cambio de dirección o sin cambio de dirección) que el valor máximo de ralentización del motor. El valor predeterminado es 10,0%.
Presión máxima de ralentización del motor (L3)La cantidad de corriente suministrada a la válvula proporcional cuando se desea la presión máxima se establece mediante esta función. Puede ajustarse en cualquier punto entre 02,0% y 100,0% de la capacidad total de salida de corriente del circuito. El valor establecido debe ser, como mínimo, un 1% menor o mayor (dependiendo de si se ha seleccionado cambio de dirección o sin cambio de dirección) que el valor mínimo de ralentización del motor. El valor predeterminado es 25,0%.
Cuando la transmisión ha alcanzado la temperatura de funcionamiento, mida y anote en la Table 6: las RPM del eje propulsor.
7.3.1 Ajuste de los valores mínimo y máximo de ralentización del motorUtilice la unidad de prueba de servicio in situ y un multímetro:
A) Desconecte el mazo de cables del embrague del procesador CruiseCommand.
B) Conecte el conector de 12 pines de la unidad de prueba de servicio in situ al conector del embrague del procesador y al mazo de cables del embrague. Consulte la Figure 49:, page 53.
C) Ajuste el multímetro al ajuste de corriente (mA).
Table 6: RPM del eje propulsor
Las RPM del eje propulsorcuando los motores han alcanzado la
temperatura de funcionamiento
mA

AJUSTES Y COMPROBACIONES (DURANTE LA NAVEGACIÓN)
Página 69
Consulte la Figure 53: D) En el multímetro, conecte el terminal negro a COM y el
terminal rojo a mA.E) Conecte el terminal negro del multímetro (COM) y el
terminal rojo (mA) tal y como se muestra en la Figure 53:
7.3.1.1 Valor mínimo de ralentización del motor
B) Active el modo de ajuste manteniendo pulsados al mismo tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
C) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
F) Active la alimentación en la fuente de alimentación del embrague. Asegúrese de que la alimentación está activada para el procesador.
G) Coloque la palanca del sistema de control en la posición de bloqueo de proa y active la ralentización del motor. (Pulse el botón de transferencia durante unos 2 segundos hasta que el LED rojo del sistema de control comience a parpadear de forma rápida).
H) Si pulsa el botón con las flechas Arriba o Abajo en el procesador, se activará el menú de funciones.
Figure 53: Conexiones del multímetro y de la unidad de prueba
Figure 54: L2 - Ajuste del valor mínimo de ralentización del motor activado
A) Utilice los botones de flecha Arriba o Abajo para desplazarse hasta el código de función L2 de presión mínima de ralentización del motor. Consulte la Figure 54:
• El multímetro leerá la señal de salida para el valor mínimo de ralentización del motor cuando el interruptor de mando de ralentización de la unidad de prueba no se encuentre en la posición “Troll Command” (sistema de control de ralentización del motor).
NOTA: CUANDO LA VÁLVULA DE RALENTIZACIÓN DEL MOTOR SE ENCUENTRA EN LA POSICIÓN DE PRESIÓN MÍNIMA DEL ACEITE, LAS RPM DEL EJE PROPULSOR DEBERÍAN ESTAR AL 30% DE LAS RPM INDICADAS EN LA TABLE 6:.

AJUSTES Y COMPROBACIONES (DURANTE LA NAVEGACIÓN)
Página 70
D) Anote las RPM del eje propulsor en la Table 7:
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
7.3.1.2 Valor máximo de ralentización del motorA) Coloque la palanca del sistema de control en la posición
seleccionada de la palanca de ralentización del motor en la posición de valor máximo.
C) Active el modo de ajuste manteniendo pulsados al mismo tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
Table 7: Presión mínima de ralentización del motor (trolling)
UNA ÚNICA HÉLICERPM del eje propulsor a la presión mínima de ralentización del motor
Aprox. 30 - 50% de lo indicado en la Table 6:
RPM del eje Corriente (mA) Función %
DOBLE HÉLICERPM del eje propulsor a la presión mínima de ralentización del motor
Aprox. 30 - 50% de lo indicado en la Table 6:
RPM del eje Corriente (mA) Función %
BABOR
ESTRIBOR
Figure 55: L3 - Ajuste del valor máximo de ralentización del motor activado
B) Utilice los botones de flecha Arriba o Abajo para desplazarse hasta el código de función L3 de presión máxima de ralentización del motor. Consulte la Figure 55: • El multímetro leerá la señal de salida para el valor
máximo de ralentización del motor cuando el interruptor de mando de ralentización de la unidad de prueba no se encuentre en la posición “Troll Command” (sistema de control de ralentización del motor).
NOTA: RESULTA DIFÍCIL UTILIZAR UN EMBRAGUE DESLIZANTE PARA CONTROLAR LAS RPM DEL EJE ENTRE EL 70 Y EL 100% DE LAS RPM NORMALES DEL EJE. NO OBSTANTE, PUEDE RESULTAR DESEABLE ESTABLECER LA POSICIÓN DE PRESIÓN MÁXIMA DE RALENTIZACIÓN DEL MOTOR CON UN VALOR SUPERIOR AL 70% DE LAS RPM PARA QUE HAYA PRESIÓN DE ACEITE ADICIONAL DURANTE LA REALIZACIÓN DE LA MANIOBRA.

AJUSTES Y COMPROBACIONES (DURANTE LA NAVEGACIÓN)
Página 71
E) Anote las RPM del eje propulsor en la Table 8:
F) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
G) Coloque la palanca del sistema de control en la posición de punto muerto/ralentí.
H) Retire la unidad de prueba de servicio in situ y vuelva a conectar el mazo de cables al procesador.
Table 8: Presión máxima de ralentización del motor (trolling)
UNA ÚNICA HÉLICERPM del eje propulsor a la presión máxima de ralentización del motor
Aprox. 70% de lo indicado en la Table 6:
RPM del eje Corriente (mA) Función %
DOBLE HÉLICERPM del eje propulsor a la presión máxima de ralentización del motor
Aprox. 70% de lo indicado en la Table 6:
RPM del eje Corriente (mA) Función %
BABOR
ESTRIBOR

AJUSTES Y COMPROBACIONES (DURANTE LA NAVEGACIÓN)
Página 71
7.4 L4 - LÍMITE DEL ACELERADOR DE RALENTIZACIÓN DEL MOTOR
La cantidad máxima del comando del acelerador que se aplica al motor se ajusta mediante esta función, mientras la válvula de ralentización del motor está deslizando el embrague de forma activa. Puede ajustar desde la ausencia de aumento en el acelerador por encima del ralentí, hasta un aumento del 20% de la aceleración máxima. La cantidad de aceleración aumenta desde el ralentí a presión mínima hasta el límite del acelerador de ralentización del motor a máxima presión.Los valores de esta función van desde el 00% al 20% del acelerador al máximo. El valor predeterminado está ajustado como 00.
A) Desconecte el mazo de cables del acelerador del procesador.B) Conecte el conector de 8 pines de la unidad de prueba de
servicio in situ al conector del acelerador del procesador y al mazo de cables del acelerador. Consulte la Figure 49:
C) Active la alimentación del ECM del motor. Asegúrese de que la alimentación está activada para el procesador.
D) Si pulsa el botón con las flechas Arriba o Abajo, se activará el menú de funciones.
E) Utilice los botones de flecha Arriba o Abajo para desplazarse hasta el código de función L4.
• El multímetro leerá la señal de salida del límite del acelerador de ralentización del motor.
F) Active el modo de ajuste manteniendo pulsados al mismo tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
G) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
H) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
Figure 56: L4 - Ajuste del límite del acelerador de ralentización del motor activado
NOTA: PARA LEER LA CORRIENTE, EL BOTÓN MA DE LA UNIDAD DE PRUEBA DE SERVICIO IN SITU DEBE PULSARSE.

AJUSTES Y COMPROBACIONES (DURANTE LA NAVEGACIÓN)
Página 72
I) Retire la unidad de prueba de servicio in situ y vuelva a conectar el mazo de cables del acelerador al procesador.

AJUSTES Y COMPROBACIONES (DURANTE LA NAVEGACIÓN)
Página 72
7.5 L5 - DURACIÓN DEL IMPULSO DE RALENTIZACIÓN DEL MOTOR
Esta función ajusta el tiempo en segundos durante el cual la válvula proporcional controlará la corriente programada en el “porcentaje de impulso de ralentización del motor”. Esta función proporciona una sobrepresión al plato del embrague para hacer que el eje del propulsor gire antes de caer hasta el nivel programado en el valor mínimo de ralentización del motor.
Para cambiar el valor:A) Si pulsa el botón con las flechas Arriba o Abajo, se activará
el menú de funciones. B) Utilice los botones de flecha Arriba o Abajo para desplazarse
hasta el código de función L5. C) Active el modo de ajuste manteniendo pulsados al mismo
tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.
7.6 L6 - PORCENTAJE DEL IMPULSO DE RALENTIZACIÓN DEL MOTOR
Esta función ajusta el porcentaje del valor máximo de ralentización del motor que la válvula proporcional controlará cuando se entre por primera vez en el modo de ralentización del motor. Esta función determina la cantidad de sobrepresión en plato del embrague para hacer que el eje del propulsor gire antes de caer hasta el nivel programado en el valor mínimo de ralentización del motor.
Los valores de esta función van desde 0, a 9, segundos. El valor predeterminado está ajustado como 0.6 segundos.
Figure 57: L5 - Ajuste del duración de impulso de ralentización del motor activado
Los valores de esta función van desde el 0,0% al 100,0%. El valor predeterminado está ajustado como 25%.
Figure 58: L6 - Ajuste del porcentaje de impulso de ralentización del motor activado
Function Code is blinking

AJUSTES Y COMPROBACIONES (DURANTE LA NAVEGACIÓN)
Página 73
Para cambiar el valor:A) Si pulsa el botón con las flechas Arriba o Abajo, se activará
el menú de funciones. B) Utilice los botones de flecha Arriba o Abajo para desplazarse
hasta el código de función L6.C) Active el modo de ajuste manteniendo pulsados al mismo
tiempo los botones de flecha Izquierda y Derecha hasta que el código de función de la unidad de pantalla comience a parpadear. Consulte la sección 5.1.
D) Pulse el botón de flecha Arriba o Abajo para cambiar el valor de la función.
E) Cuando se muestre el valor requerido, guarde el valor manteniendo pulsados los botones con las flechas Izquierda y Derecha al mismo tiempo hasta que el código de función de la unidad de pantalla deje de parpadear y se quede iluminado de forma continuada. Consulte la sección 5.1.

OPCIONES DE CONTROL
Página 74
8.0 OPCIONES DE CONTROL
8.1 CAPACIDAD DE ALARMA
PRECAUCIÓN: La salida de alarma del sistema CruiseCommand está limitada a una corriente máxima de 20 mA. Si se sobrepasa este límite, la salida alarma sufrirá daños irreparables.
NOTA: LA SIGUIENTE INFORMACIÓN SE APLICA A LOS PROCESADORES CRUISECOMMAND PROCESSORS CON UN N∨ MERO DE SERIE ZE01320 O SUPERIOR. SI SU PROCESADOR TIENE UN N∨ MERO DE SERIE INFERIOR Y DESEA UTILIZAR ESTA OPCIÓN, PÓNGASE EN CONTACTO CON ZF MATHERS PARA RECIBIR AYUDA.
Figure 59: Conexión de la salida de alarma Requisitos

OPCIONES DE CONTROL
Página 75
La salida de alarma del sistema CruiseCommand puede utilizarse para su conexión a un sistema de alarma externo suministrado por terceros. El uso de esta salida por parte del cliente es opcional. La salida de alarma se activa (contacto cerrado) cuando el procesador está en funcionamiento. La salida de alarma se desactiva (contacto abierto) si el procesador no está en funcionamiento debido a un fallo en el microcontrolador o cuando no hay alimentación.La salida se realiza a través de los pines 2 y 3 del conector J11 (alimentación) y es sensible a la polaridad: el pin 2 es positivo (+) y el pin 3 es negativo (-). El mazo de cables de alimentación correcto de ZF Mathers, que incluye el cableado de la salida de alarma, debería seleccionarse en el caso de utilizar la salida de alarma. Consulte el Appendix A - Lista de piezas para saber cuál es el mazo de cables correcto.Las conexiones externas a la salida de alarma deben cumplir las especificaciones que aparecen en la Figure 59:. Se muestra un ejemplo de una salida de alarma en la Figure 60:, pag e75.
Figure 60: Ejemplo de conexión de salida de alarma

OPCIONES DE CONTROL
Página 76
8.2 SISTEMA DE ENCLAVAMIENTO DE PRESIÓN DEL ACEITE DEL EMBRAGUE
El objeto del enclavamiento de la presión del aceite del embrague es evitar unas RPM altas del motor cuando el embrague no está completamente acoplado. El enclavamiento bloqueará una señal de velocidad al motor hasta que la presión del embrague hidráulico haya alcanzado un valor recomendado por un fabricante de cajas de cambios y que asegure el acoplamiento del embrague.El mazo de cables de alimentación puede solicitarse con un cable para su uso con el interruptor de presión del aceite del embrague.
• El interruptor de presión es suministrado por el instalador. • Se necesita un interruptor de presión N.A. (Normalmente
abierto) con un punto de corte ajustable para ajustarse a la configuración recomendada por los fabricantes de cajas de cambios.
• Cuando los contactos se cierran, esto indica al procesador cuándo el embrague está lo suficientemente acoplado como para permitir una orden de velocidad superior a la velocidad de ralentí. Se trata de una opción de seguridad que protege el embrague y su uso está recomendado.
Si la presión del embrague cae por debajo del ajuste del interruptor de presión, la velocidad del motor caerá hasta las RPM del ralentí.Si se selecciona la función del embrague C001, para restaurar la presión del embrague, el operador debe accionar el ralentí antes de que se permita un comando de velocidad por encima del ralentí.Si se selecciona la función C002, el acelerador volverá a la señal ordenada una vez que se cierre el interruptor.
NOTA: EL SISTEMA DE ENCLAVAMIENTO DE LA PRESIÓN DEL ACEITE DEL EMBRAGUE DEBE AJUSTARSE COMO INSTALADO PARA PODER UTILIZARSE. CONSULTE LA SECCIÓN 5.3.11 PARA SISTEMA DE ENCLAVAMIENTO DE LA PRESIÓN DEL ACEITE DEL EMBRAGUE INSTALADA/NO INSTALADA.

MANTENIMIENTO
Página 50
7.0 MANTENIMIENTO
7.1 PROCESADOR DE CONTROL
Comprobación de todas las conexiones de los terminales, por si hay signos de corrosión o conexiones flojas.
7.2 SISTEMA DE CONTROL
Comprobar una vez al año que los terminales del sistema de control están fijos y sin ningún tipo de corrosión.

SOLUCIÓN DE PROBLEMAS
Appendix B-7
FORMACIÓN-156 Rev G 5/03
1.0 SOLUCIÓN DE PROBLEMAS
1.1 GENERAL
El sistema de control CruiseCommand consta de un procesador por cada motor, que suele ir montado en una sala de motores y con de uno a cuatro sistemas de control ubicados en las estaciones remotas de la embarcación. Los procesadores están diseñados para controlar de forma precisa los aceleradores y las transmisiones electrónicas equipadas con un embrague de solenoide o un control de selección del embrague/ralentización del motor.
Antes de iniciar el proceso de solución de problemas, revise el diagrama del sistema CruiseCommand anterior. Familiarícese con los diversos componentes y con sus funciones dentro del sistema de control. Todos los sistemas CruiseCommand constan de un mínimo de cuatro componentes principales. Estos componentes son el/los
Figure 1: Sistema básico de control

SOLUCIÓN DE PROBLEMAS
Appendix B-8
sistema/s de control, el/los procesador/es, el cableado eléctrico (mazos de cables) y una fuente de alimentación.A continuación se muestra una breve descripción de estos componentes. A lo largo del manual se describen de forma más detallada estos componentes, sus funciones y cómo se ejecutan.
1.1.1 Sistema de controlLa principal función del sistema de control es enviar una tensión CC variable al procesador. Esta tensión CC es representativa de la posición de la palanca del sistema de control. Además de ejecutar su función principal, el sistema de control cuenta con indicaciones de estado sonoras (transductor de sonido) y visuales (LED), junto con un botón de transferencia para tomar el mando y llevar a cabo otras funciones.
1.1.2 ProcesadorEl procesador recibe la tensión CC variable del sistema/s de control y convierte estas entradas en salidas eléctricas o electrónicas apropiadas en el momento y la secuencia adecuados hacia el regulador y la caja de cambios. La información relativa al tipo de acelerador, secuenciado de acelerador/caja de cambios, etc., se encuentra guardada en la memoria del procesador.
1.1.3 Cableado eléctrico (mazos de cables)La función del cableado eléctrico es transmitir la información eléctrica de un punto a otro. El cableado eléctrico utilizado en los sistemas CruiseCommand consiste en mazos de cables con conexiones. Estos mazos de cables pueden disponer de conexiones en un extremo o en ambos, según la función que desempeñen. Todos los sistemas contarán con un mazo de cables para interfaz de sistema de control, interfaz de motor, interfaz de caja de cambios y alimentación CC. Además de esto, también se puede encontrar un mazo de cables para comunicación en serie y/o un mazo de cables de señal de cuentavueltas. Los mazos de cables de alimentación y caja de cambios se presentan en diferentes formatos para contener otros elementos como el enclavamiento del arranque y la ralentización.
1.1.4 La fuente de alimentaciónTodo el equipamiento electrónico ha de conectarse a una fuente de alimentación para funcionar. Es imprescindible asegurarse de que la capacidad de la fuente de alimentación de la que se dispone es adecuada.

SOLUCIÓN DE PROBLEMAS
Appendix B-9
1.2 PREGUNTAS PARA LA SOLUCIÓN DE PROBLEMAS
Se pueden resolver muchos problemas formulando las siguientes preguntas al cliente, antes de utilizar una herramienta o subir a bordo del barco:
A) ¿Se ha instalado el sistema en una embarcación de una sola hélice o de doble hélice? • Si el sistema se ha instalado en una embarcación de una sola
hélice, esta pregunta no va a dar muchas pistas sobre las posibles causas del fallo. Sin embargo, si la embarcación es de doble hélice, esta pregunta puede resultar muy útil.
1. ¿El problema o los fallos tienen lugar a babor, a estribor o en ambos lados?• Si el problema o el fallo sólo tiene lugar en un lado,
automáticamente se descarta el 50% de las posibles causas. Por ejemplo, si el fallo sólo tiene lugar a babor, se descartan como causas potenciales la fuente de alimentación, los mazos de cables, el procesador y los sistemas de control de estribor.
• Si el problema tiene lugar tanto a babor como a estribor en una embarcación de doble hélice, o en dos o más en el caso de aplicaciones de varias hélices, la pregunta que se formula es la siguiente: ¿qué tienen en común ambos lados? La respuesta más probable a la pregunta sería la fuente de alimentación.
B) ¿Cuántas estaciones remotas hay?• Si sólo hay una estación remota, la pregunta no será de gran
ayuda. No obstante, si se utiliza más de una estación remota, debería pasarse el control a otra estación para comprobar si el problema tiene lugar en una estación diferente.
• Si el problema existe desde más de una estación de control, lo más lógico es que los sistemas de control sean la causa del problema.
• Si el problema sólo tiene lugar en una estación remota, hay muchas posibilidades de que el sistema de control o el mazo de cables del sistema de control sea la causa.
C) ¿Se emite algún sonido cuando ocurre el problema?• El sistema CruiseCommand puede emitir cinco sonidos
diferentes para avisar al operador de un problema potencial La identificación de estos sonidos facilitará la localización de la posible causa del problema.
1. Sonido repetitivo lento, también llamado “Sonido de inicialización”, es normal cuando se activa por primera vez la alimentación de corriente CC en el sistema CruiseCommand. Este sonido indica:• El sistema acaba de conectarse a la corriente

SOLUCIÓN DE PROBLEMAS
Appendix B-10
• El programa de software está funcionando correctamente• El procesador está cambiando el acelerador a la posición de
ralentí y el embrague, a la posición de punto muerto.
2. Señal repetitiva: Un sonido largo y tres cortos se utiliza para indicar una señal de mando errónea en el sistema de control de estación remota al mando.
3. Sonido fijo indica que algo no funciona correctamente en el sistema de control. Normalmente este sonido irá acompañado de un mensaje de error en la pantalla del procesador.
4. Señal repetitiva: Un sonido largo y uno corto indican que hay algún fallo en uno o varios de los circuitos solenoides de embrague o de punto muerto. Este sonido irá acompañado de un mensaje de error en la pantalla del procesador. Este sonido sólo puede oírse si el fallo del impulsor superior está activado.
5. Sonido fijo de tres segundos se genera cuando se detecta un fallo en el solenoide de activación/desactivación de ralentización del motor o en el solenoide proporcional de ralentización del motor. Normalmente este sonido irá acompañado de un mensaje de error en la pantalla del procesador. Este sonido sólo puede oírse si el fallo del impulsor superior está activado.
• ¿Aparece algún mensaje de error en la pantalla del procesador? Además de emitir un sonido, siempre que el sistema funcione de forma incorrecta o detecte un fallo, mostrará un mensaje de error en la pantalla. Anote el número del mensaje de error para comunicarlo a los representantes de ZF Mathers.
D) ¿Están encendidos el(los) LED(s) del (de los) sistema(s) de control o no?• El(los) LED(s) se encontrarán en uno de cuatro estados.
1. Encendido fijo
2. No encendido
3. Parpadeo lento
4. Parpadeo rápido• Cuando el LED está encendido fijo, indica que la estación está
al mando y en el modo de funcionamiento normal.• Cuando el LED está en no encendido, esa estación no está al
mando o no está funcionando correctamente.• Un LED en parpadeo lento indica que el sistema de control
está en “Modo de calentamiento”.• Un LED en parpadeo rápido indica que el sistema está
funcionando en “Modo de ralentización”.

SOLUCIÓN DE PROBLEMAS
Appendix B-11
E) ¿Ha cambiado algo a bordo de la embarcación?• Ésta es una pregunta que se suele pasar por alto, pero debería
tenerse siempre en cuenta. Elementos como un equipo electrónico adicional en la embarcación pueden afectar de forma evidente a la carga de la fuente de alimentación y, consecuentemente, al sistema de control.
• Puede que se hayan llevado a cabo cambios que obviamente hayan afectado al sistema y que el operador haya pasado por alto mencionarlos. Un ejemplo sería el recambio de la fuente de alimentación de la embarcación. Cambiar un motor Caterpillar, por ejemplo, por un Cummins Electrónico afectaría de forma considerable a la transmisión de señal adecuada del procesador al regulador.
• También conviene preguntar por cambios que, en principio, no parecen estar relacionados con el sistema de control. Por ejemplo, si se acaba de pintar la embarcación. Se ha dado el caso de que, sin motivo aparente, el pintor haya decidido desconectar un sistema de control y lo haya reconectado después de forma incorrecta.
En muchos casos, estas sencillas preguntas pueden resolver un problema sin demasiado esfuerzo. Conviene dedicar el tiempo necesario a considerar estas preguntas. A la larga supone un ahorro de tiempo y dinero para usted y el cliente.
1.3 RESOLUCIONES DE PROBLEMAS
Si con las preguntas anteriores no se ha conseguido resolver el problema, el siguiente paso será una inspección minuciosa del sistema de control. Compruebe que el sistema se corresponde con las instrucciones del manual de instalación revisando minuciosamente lo siguiente:
A) La fuente de alimentación CC1. Asegúrese de que la alimentación del (de los)
procesador(es) y del embrague está conectada correctamente a una batería de 12 o 24 voltios CC con un cortacircuitos de 10 amperios.
2. Para asegurar una alimentación adecuada del (de los) procesador(es), incluso en caso de que falle una batería, se puede utilizar un APS (selector automático de alimentación), como se muestra en Appendix C los dibujos de opciones de alimentación.
B) La ubicación de los componentes1. Los sistemas de control: prácticamente no existen
restricciones en cuanto a la ubicación de los sistemas de control de las series 400 y MC2000, ya que el fondo está

SOLUCIÓN DE PROBLEMAS
Appendix B-12
protegido del exterior. En el caso de los sistemas de control de la serie 700, ni siquiera se plantea esta cuestión.
2. Los procesadores: normalmente los procesadores se montan en cualquier lugar del compartimento del motor, siempre que se mantenga una distancia mínima de 4 pies (1,22m) entre las fuentes de calor elevado y EMI o alimentación RFI.
C) El estado de los componentes1. Sistemas de control: compruebe que no haya ninguna
señal de corrosión debida a la incursión del agua. Asegúrese de que todas las conexiones bifurcadas están conectadas a la tira de terminales.
2. Los procesadores: compruebe que los procesadores no presentan señal alguna de daño físico.
D) El cableado de interconexión1. Compruebe que las clavijas y las tomas del mazo de
cables no presentan desperfectos ni señales de corrosión.
La clave para solucionar un problema del sistema de control CruiseCommand consiste en identificar cuál de las siguientes categorías es la causa del problema:
• La fuente de alimentación CC• Cableado de interconexión (mazos de cables)• Motor o transmisión• Calibrado de componentes• Fallo del sistema de control• Fallo del procesador
En las siguientes páginas debería encontrar las pautas para localizar el origen del problema. No es necesario reparar ningún otro punto aparte de los mencionados en la lista anterior para que el sistema funcione correctamente. Si se descubre que el fallo tiene que ver con algún componente del sistema de control, no habrá más que sustituir el componente por otro.Cuando el sistema no funciona correctamente, lo primero en lo que suele pensar el operador es en la situación actual de la embarcación. ¿Hay otras embarcaciones en la zona? ¿La embarcación se inclina hacia babor o estribor?, etc. Inmediatamente después, el operador piensa en el sistema de control y sus palancas. Por este motivo y por el hecho de que el sistema de control se encuentra en el mismo lugar que el operador, el sistema de control se utiliza como punto de partida para solucionar problemas de funcionamiento incorrecto del sistema. El sistema de control emite 5 sonidos diferentes para avisar

SOLUCIÓN DE PROBLEMAS
Appendix B-13
al operador de un problema potencial. Estos sonidos se describen detalladamente en la sección 1.5. Además, hay que tener en cuenta el estado del LED rojo; por ejemplo, si está encendido, apagado, parpadeando, etc. Conocer el estado de estos elementos resulta bastante útil para solucionar problemas.
1.4 MENÚ DE DIAGNÓSTICO
Para acceder a la información de diagnóstico que proporciona el procesador, hay que seguir los siguientes pasos. Los diagnósticos proporcionan la siguiente información:
• Tensión de la batería conectada• Frecuencia del emisor de cuentavueltas• Estaciones A/D 1-4• Estaciones 1-4 Estado del botón de transferencia• Nivel de revisión del software
A) Ubique la pantalla en el procesador de babor o estribor. La pantalla tendrá una referencia moviéndose de izquierda a
Los sistemas de control, ubicados en todas las estaciones remotas, cuentan con LEDs y transductores de sonido. Estos dispositivos tienen indicadores de estado visuales y sonoros, que ayudan a solucionar problemas.
Figure 2: Indicadores del sistema de control
Aparte de las indicaciones sonoras y visuales propias de los sistemas de control, el procesador cuenta con cuatro paneles de siete segmentos (pantalla), que muestran códigos de error, además de información sobre ajustes, descrita previamente en el manual de instalación. Estos códigos de error permiten saber si se ha instalado el sistema de forma incorrecta, si se ha producido un fallo y, en ese caso, de qué tipo. Además, los cuatro paneles de siete segmentos se pueden utilizar conjuntamente con los botones de desplazamiento para mostrar información acerca del diagnóstico.
Figure 3: Procesador
Port
Red LED
Port
Sound
Transducer
Starboard
Red LED
Starboard
Sound
Transducer
11580-

SOLUCIÓN DE PROBLEMAS
Appendix B-14
derecha similar a Figure 4: mientras el programa esté en funcionamiento:
B) Pulse el botón con las flechas arriba o abajo. Los caracteres “A0 01” aparecerán en la pantalla.
C) Pulse el botón con las flechas arriba o abajo repetidamente hasta que aparezca “H0 00”.
D) Mantenga pulsados los botones con las flechas izquierda y derecha al mismo tiempo hasta que “H0” comience a parpadear. Deje de pulsar los botones; la tensión de la batería conectada aparecerá ahora en pantalla:
• El valor que se muestra está en “tiempo real” e indica la tensión CC aproximada a la que está conectado el procesador. La lectura oscila en un margen de 0,50 CC.
E) Además de la tensión de la batería conectada, si se pulsa el botón con las flechas arriba o abajo para desplazarse por el menú de
Figure 4: Referencia de la pantalla
Figure 5: Función A0 en pantalla
Figure 6: Función H0 en pantalla
Figure 7: Tensión de la batería conectada en pantalla

SOLUCIÓN DE PROBLEMAS
Appendix B-15
diagnósticos, también se puede ver la frecuencia del emisor de cuentavueltas:
• La información que aparece corresponde a la frecuencia real del emisor de cuentavueltas. Esta señal se utiliza en los sistemas de sincronización en “circuito cerrado” o de ralentización en “circuito cerrado” (futuros).
• La posición de la palanca del sistema de control, así como las salidas resultantes de los sistemas de control de las estaciones # 1, 2, 3 y 4 se pueden observar siempre. Además, no importa si la estación está al mando o no. En los ejemplos que siguen se puede ver cómo la ubicación de los puntos decimales muestra las cuatro estaciones con la palanca en la posición punto muerto/ralentí. Más adelante se explica con más detalle.
• Se puede observar el estado actual de todos los botones de transferencia del sistema de control desde el menú de diagnóstico. Un “1” indica que el interruptor está cerrado (botón de transferencia pulsado), mientras que un “0” indica que el interruptor está abierto. Esto también se explica más adelante con más detalle.
.
Figure 8: Frecuencia del emisor de cuentavueltas en Hz en pantalla
Figure 9: Posiciones de la palanca del sistema de control actual con las estaciones en pantalla
Figure 10: Estado del botón de transferencia del sistema de control de las estaciones en pantalla

SOLUCIÓN DE PROBLEMAS
Appendix B-16
F) Si se pulsa la flecha arriba o abajo una vez más, aparecerá el nivel de revisión actual del software. Esto proporcionará una información muy valiosa en los años venideros. Determinar las características o posibilidades de un CruiseCommand será tan sencillo como seleccionar esta opción.
G) Si se vuelve a pulsar una vez más el botón con las flechas arriba o abajo, se vuelve a la pantalla de tensión de la batería conectada.
H) Se puede salir del menú de diagnóstico de dos formas:• Sin tocar ningún botón durante 5 minutos. El sistema saldrá
automáticamente.• Pulse el botón de la flecha izquierda hasta que aparezca
“H0 00”. Ahora ya se puede desplazar por el menú de ajuste.
Figure 11: Nivel de revisión del software

SOLUCIÓN DE PROBLEMAS
Appendix B-17
1.5 SONIDOS
Tal y como ya se ha dicho anteriormente, existen diferentes sonidos que se emiten desde el sistema de control cuando se produce un error. Estos sonidos son los siguientes:
1.5.1 Sonido de repetición lenta
El sonido de repetición lenta, también llamado “sonido de inicialización”, es el sonido que se oye en todas las estaciones remotas cuando el sistema de control se conecta a una fuente de alimentación. Cuando se oye este sonido, los siguientes hechos se dan por seguros:
• El sistema acaba de conectarse a la corriente• El programa de software está funcionando correctamente• El procesador está cambiando el acelerador a la posición de
ralentí• El procesador está cambiando el embrague a la posición de
punto muerto
Este sonido es totalmente normal cuando se acaba de conectar el procesador por primera vez a la corriente y ningún sistema de control está al mando. No obstante, el sonido puede indicar un problema, si durante el funcionamiento normal, el acelerador del motor se situara en ralentí y el embrague, en punto muerto; se encendiera el LED rojo del sistema de control y se oyera un sonido de repetición lenta en todas las estaciones. Esto indicaría que la tensión en el procesador ha caído momentáneamente por debajo de 8 VCC y después habría vuelto a un nivel operativo normal. Esto podría deberse a:
• Conexión del cable de alimentación de la batería suelta• Batería defectuosa o mal cargada• Caída de tensión debido al suministro de corriente
Con el fin de desvelar la causa exacta de la baja tensión del procesador, siga estas instrucciones:
A) Compruebe que en la pantalla del procesador no haya mensajes de error. El mensaje de error 55 puede aparecer indicando tensión baja. También puede aparecer uno o más mensajes de error del 37 al 53. Esto se debe a la pérdida momentánea de la comunicación serial entre los dos procesadores. El error de baja tensión no depende sólo del nivel de tensión, sino también de la duración de la corriente baja. Existe la posibilidad de que no aparezca ningún mensaje de error, si la duración de la corriente baja ha sido lo suficientemente breve. Sin embargo, los otros síntomas mencionados sí que se producen.
Figure 12: Sonido de repetición lenta

SOLUCIÓN DE PROBLEMAS
Appendix B-18
B) En cualquier caso, siga el procedimiento descrito bajo el menú de diagnóstico (sección 1.4) hasta que aparezcas la tensión de la batería conectada. Anote la tensión aplicada.
C) Vaya a la batería o panel de distribución principal que alimenta al procesador. Mida la tensión en esta fuente de alimentación con una voltímetro de CC. La tensión de la batería debe ser superior a 12,4 voltios en sistemas de 12 V CC y a 24,8 voltios en sistemas de 24 V CC. Si no es así, la batería o su sistema de carga deberán ser reparados.
D) El diferencial de tensión entre la fuente de alimentación y el procesador no debe superar 1,2 voltios en los sistemas de 12 V CC y 2,4 voltios en los sistemas de 24 V CC. Si el diferencial supera estos valores, debe existir una resistencia alta en algún punto entre la batería y el procesador.
E) La resistencia alta, que provoca una tensión diferencial igual de 1,2 voltios o más (sistemas 12 V CC) y de 2,4 voltios o más (sistemas 24 V CC), puede ser el resultado de conexiones flojas o corroídas, contactos de relé sucios o cables de alimentación de un tamaño no adecuado.
F) Si el diferencial de tensión es inferior a 1,2 voltios (sistemas 12 V CC) o 2,4 voltios (sistemas 24 V CC), situación más común que la anterior, puede que exista una mala conexión entre la fuente de alimentación y el procesador. La vibración producida mientras la embarcación navega, puede provocar que el circuito de abra intermitentemente. Compruebe la existencia de tornillos o tuercas sueltas, etc., entre la fuente de alimentación y el procesador.
1.5.2 Un sonido largo y tres cortos
Este sonido indica la existencia de una señal de mando errónea en la estación remota al mando. El procesador espera una tensión CC, representativa de la posición de la palanca del sistema de control, entre 0,5 y 4,40 V CC aprox. A continuación, el procesador interpreta la tensión CC como un recuento A/D. Más información acerca de los recuentos A/D más adelante. Este sonido aparecerá si la tensión cae por debajo de estos valores o si los supera. La señal de control del acelerador caerá al ralentí y, al mismo tiempo, el embrague controlará la posición de punto muerto. El fallo puede deberse a:
NOTA: SI EN EL CIRCUITO DE ALIMENTACIÓN SE UTILIZA UN APS, TENGA EN CUENTA LA CAÍDA DE TENSIÓN DE 0,7 V CC DE LOS DIODOS, QUE PODRÍA AUMENTAR EL DIFERENCIAL PERMISIBLE DE 1,9 A 3,1 V CC, DEPENDIENDO DEL SISTEMA, 12 O 24 V CC, QUE SE TRATE.
Figure 13: Un sonido largo y tres cortos

SOLUCIÓN DE PROBLEMAS
Appendix B-19
• Un circuito abierto o una conexión de resistencia alta entre el sistema de control y el procesador.
• Sistema de control descalibrado• Sistema de control defectuoso
Para averiguar la causa exacta del fallo en el funcionamiento:A) Compruebe la pantalla del procesador por si aparecen
mensajes de error. En la mayor parte de los casos, se mostrará un mensaje de error del 13 al 28. El número exacto que aparezca depende de en qué estación remota esté el problema y de que el Voltaje de mando sea demasiado alto o demasiado bajo.
B) Para deducir la causa, utilice el menú de diagnóstico como se señala en la Sección 1.4.
C) Pulse el botón con las flechas arriba o abajo hasta que aparezca la estación remota adecuada. La estación remota adecuada se puede identificar por la posición de los puntos decimales. La estación 1 no tiene puntos decimales a partir del primer dígito de la derecha. Los tres dígitos restantes sí tienen puntos decimales. Si al dígito de la izquierda no le sigue ningún punto decimal, pero sí a los otras tres restantes, entonces será la estación 4.
D) Los ejemplos anteriores se aparecen sin sistemas de control conectados a estaciones remotas. Cuando un sistema de control esté conectado, aparecerá el valor A/D (Analógico/
Figure 14: Ejemplo de estaciones de pantalla

SOLUCIÓN DE PROBLEMAS
Appendix B-20
Digital) apropiado para la posición actual de la palanca del sistema de control, como en los siguientes ejemplos:
E) Si el valor A/D es igual o superior a 900, aparecerá uno de los Códigos de Error 13- 20.
F) Si el valor A/D se encuentra entre 900 y 990, una causa posible puede ser:• El potenciómetro del sistema de control está descalibrado.• El potenciómetro es defectuoso.
G) En cualquiera de los casos, se recomienda sustituir el sistema de control.
H) Si el valor A/D es igual o superior a 995, seguramente se habrá desconectado el PUENTE entre los pines 3 y 5 (derecha) o 3 y 7 (izquierda) del sistema de control. Si además de que el valor A/D es igual o superior a 995, el LED no se enciende ni se escucha el sonido, el cable rojo conectado entre el pin 3 del sistema de control y el pin 5 del procesador debe estar abierto.
I) Si el valor A/D es igual o superior a 100, aparecerá uno de los Códigos de Error 21-28.
J) Si el valor A/D se encuentra entre 75 y 100, una causa posible puede ser:• El potenciómetro del sistema de control está descalibrado.• El potenciómetro es defectuoso.• Existe una conexión de resistencia alta en el cable verde entre
el sistema de control y el procesador.
K) Si el valor A/D es inferior a 75, hay un circuito abierto en los cables verdes o azules.
Figure 15: Valor A/D de las estaciones de la pantalla

SOLUCIÓN DE PROBLEMAS
Appendix B-21
1.5.3 Sonido fijo
Sonido fijo indica al operador que algo no funciona correctamente en el sistema de control. Normalmente este sonido irá acompañado de un mensaje de error en la pantalla del procesador. Si se escucha el sonido, se deberá consultar la pantalla del procesador para realizar un diagnóstico del problema.
1.5.4 Uno largo y otro corto
Este sonido indica la existencia de algún tipo de mal funcionamiento en uno o más circuitos solenoides de embrague o punto muerto. Para deducir la naturaleza exacta del fallo de funcionamiento consulte el mensaje de error de la pantalla. Existen seis mensajes de error diferentes, uno o más de ellos aparecerán en la pantalla al oir el sonido. En función del solenoide y de si se ha detectado un cortocircuito o circuito abierto. Aparecerá el mensaje de error 1, 2, 3, 4, 5, o 6. Para activar esta opción, se debe informar a la memoria/programa del sistema de la existencia de estos solenoides.
1.5.5 Sonido fijo de tres segundos
El sonido se genera cuando se detecta un fallo en el solenoide de activación/desactivación de ralentización del motor o en el solenoide proporcional de ralentización del motor. El sonido vendrá acompañado por uno o más mensajes de error 7, 8, 9 y 10. Para activar esta opción, se debe informar al programa/memoria del sistema de la existencia de estos solenoides.El sonido también se genera con un botón de transferencia de bloqueo del sistema de control. Consulte la sección 1.6.3 para obtener más información.
1.6 TRANSFERENCIA DE ESTACIÓN
Para transferir el mando de una estación remota a otra, debe ocurrir lo siguiente:
• Debe haber una “Señal de mando” válida del control del sistema al procesador.
• La “Señal de mando” debe indicar que la(s) palanca(s) del sistema de control se encuentra(n) en posición de punto muerto / ralentí.
Figure 16: Sonido fijo
Figure 17: Un sonido largo y otro corto
Figure 18: Sonido fijo de tres segundos

SOLUCIÓN DE PROBLEMAS
Appendix B-22
• Se debe pulsar el botón de transferencia que toma la señal de “Seleción de estación” de 5,00 V CC a 0,00 V CC.
Esos elementos se pueden probar de la siguiente manera:
1.6.1 Señal de mandoComo se ha mencionado anteriormente, la señal de mando es una tensión CC que varía en relación a la posición de la palanca del sistema de control. El procesador proporciona a cada sistema de control 5,00 V CC, lo que se denomina “Tensión de referencia”. La tensión de referencia se aplica a un potenciómetro 5K en el sistema de control. El contacto móvil del potenciómetro deriva parte de la tensión de referencia y la devuelve al procesador. La cantidad de tensión CC derivada depende de la posición de la palanca del sistema de control. Cuando la palanca se encuentra en la posición de bloqueo de popa, el contacto móvil deriva una parte pequeña de la tensión de referencia y, por tanto, la tensión alcanza su punto más bajo (0,60 V CC aprox.). Cuando la palanca se encuentra en la posición de bloqueo de proa, se deriva una parte más grande de la tensión, alcanzando ésta su punto más alto (4,40 V CC aprox.).Como todos los cálculos del sistema CruiseCommand se ejecutan de forma digital, estas tensiones CC se expresan y se convierten en una representación digital. La “tensión de referencia” (aprox. 5,00 V CC) en la que se basan todas las salidas analógicas, se representa como 1.023 recuentos A/D (De analógico a digital). Lo que permite la posibilidad de contar con 1.024 posiciones posibles cuando 0 se incluye en el recuento. El valor de la tensión de mando, con la palanca en posición de punto muerto/ralentí es el 48- 50% de la tensión de referencia o A/D 491- 511 (2,40- 2,50 V CC). La tensión de mando en posición de bloqueo de proa completa es el 83- 85% o A/D 849- 869 (4,15- 4,25 V CC) y en posición de bloqueo de popa, el 12- 14% o A/D 123- 143 (0,60- 0,70 V CC).Como la señal de mando se basa en un porcentaje de la tensión de referencia, la distancia del sistema de control del procesador no produce ningún impacto en el rendimiento del sistema. La cantidad de caída de tensión, debida al flujo de corriente, es la misma para las dos tensiones, la de referencia y la de mando. La relación entre las tensiones de referencia y de mando en porcentajes será la misma sea cual sea la distancia. Por ejemplo:
Ejemplo 1 Ejemplo 2
Tensión de referencia 5,00 V CC 1.023 recuentos A/D Tensión de referencia 4,80 V CC 1.023 recuentos A/D
Tensión de mando 2,45 V CC 501 recuentos A/D Tensión de mando 2,35 V CC 501 recuentos A/D

SOLUCIÓN DE PROBLEMAS
Appendix B-23
Como puede observar en los ejemplos, aunque las tensiones de mando son diferentes en los ejemplos 1 y 2, los recuentos A/D resultantes son los mismos porque las tensiones de referencia también son diferentes. Por lo que el procesador mandaría salidas idénticas (embrague y acelerador) en ambos casos.
A) El recuento A/D para una palanca específica del sistema de control se puede observar en la pantalla del procesador, siguiendo los pasos indicados en la Sección 1.4.
B) Una vez alcanzada la estación deseada, asegúrese de que el recuento A/D que se muestra representa la posición de punto muerto/ralentí (recuentos A/D 491- 511). El mando no se aceptará a menos que la palanca del sistema de control se encuentre en la posición de punto muerto/ralentí.
1.6.2 Selección de la estación remotaEl segundo elemento necesario para tomar el mando es la “Selección de la estación” o pulsar el botón de transferencia. La funcionalidad del botón de transferencia se puede probar pulsando los botones de las flechas arriba y abajo una vez más, después de mostrar los A/A de las cuatro estaciones remotas. En este momento, la pantalla aparecerá como los A/D de la estación sin los puntos decimales, como se muestra en Figure 19:
Cuando se pulsa el botón de transferencia, el 0 que representa esa estación remota, cambiará a un 1 como se muestra en Figure 20:
Si en algún momento no se puede alcanzar el mando de una estación remota en particular, lo primero que se debe examinar es la Selección de estación y Señales de mando. Si la Señal de mando está fuera del campo o la Selección de estación no se
Figure 19: A/D de la estación de la pantalla sin puntos decimales
Figure 20: Pantalla con el botón de transferencia pulsado

SOLUCIÓN DE PROBLEMAS
Appendix B-24
encuentra operable, el mando no será aceptado en esa estación remota.
1.6.3 Botón de transferencia de bloqueoEl botón de transferencia es un interruptor normalmente abierto momentáneamente. La única vez en que el interruptor se debe cerrar es cuando se pulsa para obtener el mando o al introducir o salir de otras funciones. En el caso en que el botón de transferencia se bloquee en la posición cerrada, ocurrirá lo siguiente:
• El botón de transferencia se cerrará durante 15 segundos o más.• El acelerador y el embrague no se verán afectados.• Se escuchará un sonido sólido desde todas las estaciones remotas
hasta que el botón se desbloquee o tenga lugar la transferencia a otra estación remota.
• Si un sistema de control que no está al mando tiene un botón de transferencia de bloqueo, ocurrirá lo siguiente:
Si las palancas del sistema de control se encuentran en posición de punto muerto/ralentí, se escuchará un sonido sólido desde todas las estaciones remotas.
Si las palancas del sistema de control se encuentran en una posición diferente a las de punto muerto/ralentí, se escuchará un sonido sólido desde todas las estaciones remotas.
• Un código de error 29 - 32, dependiendo de la estación remota, aparecerá en la pantalla del procesador.
• Se puede tomar el mando de cualquier otra estación remota opcional.
• Después de un (1) segundo se puede alcanzar el mando en la estación remota con el botón de bloqueo, siempre y cuando se haya corregido el problema, pulsando el botón de tranferencia.
A) Si se sospecha de un botón de transferencia de bloqueo, se puede comprobar mirando el estado de Selección de estación (1 o 0) como se muestra en la Sección 1.6.2.
B) Puede que aparezca un código de error 29-32 en la pantalla. El número del código de error depende de la estación en la que resida el problema.
1.7 MENSAJES DE ERROR
Como se ha dicho anteriormente, en el caso en que se produzca algún problema en el sistema de control, el sistema CruiseCommand puede reproducir un gran número de mensajes de error para ayudar a detectar la causa. Table 1: ofrece una lista con los mensajes de error, junto con una breve descripción. Algunos de los mensajes de error

SOLUCIÓN DE PROBLEMAS
Appendix B-25
se encuentran instalados en el software para consideraciones futuras, mientras que otros serán agregados muy pronto.
Table 1: Mensajes de error
E rr T ítu lo D escr ip c ió n
1 Recorte de embrague de popa Parece que el solenoide del embrague de popa está recortado o que necesita más corriente de la que se puede suministrar.
3 Recorte del punto muerto del embrague
Parece que el solenoide de punto muerto está recortado o que necesita más corriente de la que se puede suministrar.
5 Recorte de embrague de proa Parece que el solenoide del embrague de proa está recortado o que necesita más corriente de la que se puede suministrar.
7 Recorte de activación/desactivación de la ralentización del motor
Parece que el solenoide de la ralentización del motor está recortado o que necesita más corriente de la que se puede suministrar.
9 Recorte del sistema de control de ralentización del motor
Parece que el solenoide del sistema de control de ralentización del motor está recortado o que necesita más corriente de la que se puede suministrar.
10 Sistema de control de ralentización del motor abierto
Parece que el solenoide del sistema de control de ralentización del motor está abierto. Probablemente, el solenoide no estará conectado.
13 Estación remota 1 Fallo en valor alto
Estación 1 Posición de la palanca del sistema de control fuera del rango. La entrada parece ser demasiado alta.
14 Estación remota 2 Fallo en valor alto
Estación 2 Posición de la palanca del sistema de control fuera del rango. La entrada parece ser demasiado alta.
15 Estación remota 3 Fallo en valor alto
Estación 3 Posición de la palanca del sistema de control fuera del rango. La entrada parece ser demasiado alta.
16 Estación remota 4 Fallo en valor alto
Estación 4 Posición de la palanca del sistema de control fuera del rango. La entrada parece ser demasiado alta.
17 Estación remota 5 Fallo en valor alto
Estación 5 Posición de la palanca del sistema de control fuera del rango. La entrada parece ser demasiado alta.
18 Estación remota 6 Fallo en valor alto
Estación 6 Posición de la palanca del sistema de control fuera del rango. La entrada parece ser demasiado alta.
19 Estación remota 7 Fallo en valor alto
Estación 7 Posición de la palanca del sistema de control fuera del rango. La entrada parece ser demasiado alta.
20 Estación remota 8 Fallo en valor alto
Estación 8 Posición de la palanca del sistema de control fuera del rango. La entrada parece ser demasiado alta.
21 Estación remota 1 Fallo en valor bajo
Estación 1 Posición de la palanca del sistema de control fuera del rango. La entrada parece ser demasiado baja.
22 Estación remota 2 Fallo en valor bajo
Estación 2 Posición de la palanca del sistema de control fuera del rango. La entrada parece ser demasiado baja.
23 Estación remota 3 Fallo en valor bajo
Estación 3 Posición de la palanca del sistema de control fuera del rango. La entrada parece ser demasiado baja.
24 Estación remota 4 Fallo en valor bajo
Estación 4 Posición de la palanca del sistema de control fuera del rango. La entrada parece ser demasiado baja.
25 Estación remota 5 Fallo en valor bajo
Estación 5 Posición de la palanca del sistema de control fuera del rango. La entrada parece ser demasiado baja.
26 Estación remota 6 Fallo en valor bajo
Estación 6 Posición de la palanca del sistema de control fuera del rango. La entrada parece ser demasiado baja.
27 Estación remota 7 Fallo en valor bajo
Estación 7 Posición de la palanca del sistema de control fuera del rango. La entrada parece ser demasiado baja.
28 Estación remota 8 Fallo en valor bajo
Estación 8 Posición de la palanca del sistema de control fuera del rango. La entrada parece ser demasiado baja.
29 Estación remota 1 Botón de bloqueo cerrado
Estación 1 El botón de transferencia del sistema de control ha estado cerrado demasiado tiempo o está cerrado desde que se ha encendido.

SOLUCIÓN DE PROBLEMAS
Appendix B-26
E rr T ítu lo D escr ip c ió n
30 Estación remota 2 Botón de bloqueo cerrado
Estación 2 El botón de transferencia del sistema de control ha estado cerrado demasiado tiempo o está cerrado desde que se ha encendido.
31 Estación remota 3 Botón de bloqueo cerrado
Estación 3 El botón de transferencia del sistema de control ha estado cerrado demasiado tiempo o está cerrado desde que se ha encendido.
32 Estación remota 4 Botón de bloqueo cerrado
Estación 4 El botón de transferencia del sistema de control ha estado cerrado demasiado tiempo o está cerrado desde que se ha encendido.
33 Estación remota 5 Botón de bloqueo cerrado
Estación 5 El botón de transferencia del sistema de control ha estado cerrado demasiado tiempo o está cerrado desde que se ha encendido.
34 Estación remota 6 Botón de bloqueo cerrado
Estación 6 El botón de transferencia del sistema de control ha estado cerrado demasiado tiempo o está cerrado desde que se ha encendido.
35 Estación remota 7 Botón de bloqueo cerrado
Estación 7 El botón de transferencia del sistema de control ha estado cerrado demasiado tiempo o está cerrado desde que se ha encendido.
36 Estación remota 8 Botón de bloqueo cerrado
Estación 8 El botón de transferencia del sistema de control ha estado cerrado demasiado tiempo o está cerrado desde que se ha encendido.
37 CAN error de compresión en la comunicación
El protocolo Control-Área-Red ha detectado un error en la comunicación con otros dispositivos de la red. El tipo de error es un del tipo de compresión en la comunicación.
38 CAN error de forma en la comunicación
El protocolo Control-Área-Red ha detectado un error en la comunicación con otros dispositivos de la red. El tipo de error es un del tipo de forma en la comunicación.
39 CAN error de adjudicación en la comunicación
El protocolo Control-Área-Red ha detectado un error en la comunicación con otros dispositivos de la red. El tipo de error es un del tipo de adjudicación en la comunicación.
40 CAN Error de comunicación Bit 1
El protocolo Control-Área-Red ha detectado un error en la comunicación con otros dispositivos de la red. El tipo de error es un del tipo Bit 1.
41 CAN Error de comunicación Bit 0
El protocolo Control-Área-Red ha detectado un error en la comunicación con otros dispositivos de la red. El tipo de error es un del tipo Bit 0.
42 CAN error CRC en la comunicación
El protocolo Control-Área-Red ha detectado un error en la comunicación con otros dispositivos de la red. El tipo de error es un del tipo CRC.
43 CAN Fallo en el enlace de comunicación
El protocolo Control-Área-Red ha detectado un error en la comunicación con otros dispositivos de la red. El tipo de error es un del tipo de fallo en el enlace de la comunicación. Este error no se puede recuperar sin reciclar la corriente de alimentación al procesador.
44 Sistema 1 de tiempo de espera de error de comunicación
La comunicación con el sistema ha sido demasiado larga sin ningún mensaje de regeneración
45 Sistema 2 de tiempo de espera de error de comunicación
La comunicación con el sistema ha sido demasiado larga sin ningún mensaje de regeneración
46 Sistema 3 de tiempo de espera de error de comunicación
La comunicación con el sistema ha sido demasiado larga sin ningún mensaje de regeneración
47 Sistema 4 de tiempo de espera de error de comunicación
La comunicación con el sistema ha sido demasiado larga sin ningún mensaje de regeneración
48 Sistema 5 de tiempo de espera de error de comunicación
La comunicación con el sistema ha sido demasiado larga sin ningún mensaje de regeneración
49 Sistema 6 de tiempo de espera de error de comunicación del extensor de la estación
La comunicación con el extensor de la estación ha sido demasiado larga sin ningún mensaje de regeneración
50 Sistema 7 de tiempo de espera de error de comunicación del extensor de la estación
La comunicación con el extensor de la estación ha sido demasiado larga sin ningún mensaje de regeneración
51 Sistema 8 de tiempo de espera de error de comunicación del extensor de la estación
La comunicación con el extensor de la estación ha sido demasiado larga sin ningún mensaje de regeneración
52 Sistema 9 de tiempo de espera de error de comunicación del extensor de la estación
La comunicación con el extensor de la estación ha sido demasiado larga sin ningún mensaje de regeneración
Table 1: Mensajes de error

SOLUCIÓN DE PROBLEMAS
Appendix B-27
1.8 ENTORNO DEL PROBLEMA
Table 2: presenta una lista con varios códigos de error seguidos pos las posibles causas y soluciones. El mensaje de error sólo aparecerá en el lateral de babor o estribor adecuado. Éstas no son las únicas causas posibles de los mensajes de error de la lista, son sólo unas posibilidades.
E rr T ítu lo D escr ip c ió n
53 Sistema 10 de tiempo de espera de error de comunicación del extensor de la estación
La comunicación con el extensor de la estación ha sido demasiado larga sin ningún mensaje de regeneración
54 Fallo de sobretensión La tensión de batería aplicada se ha encontrado por encima de los límites durante más de 2 segundos.
55 Fallo de subvoltaje La tensión de batería aplicada se ha encontrado por debajo de los límites durante más de 2 segundos.
56 Reinicio debido al dispositivo de seguridad del software
El sistema ha ejecutado un reinicio inesperado debido a un problema en el software/hardware
57 Reinicio debido al fallo del software
El sistema ha ejecutado un reinicio inesperado debido a un problema en el software
58 Reinicio debido al dispositivo de seguridad del hardware
El sistema ha ejecutado un reinicio inesperado debido a un problema en el software/hardware
59 Dispositivo de seguridad del oscilador
El sistema interno PLL (circuito de fase sincronizada) ha experimentado un fallo en el funcionamiento.
Table 2: entorno del problema
E rr C a u sa S o lu c ió n1 a) El solenoide del embrague de popa es defectuoso a) Sustituya el solenoide del embrague de popa.
b) El mazo de cables del embrague no está bien conectado a la caja de cambios.
b) Conecte bien el mazo de cables del embrague al solenoide de popa.
2 a) El solenoide del embrague de popa está abierto. a) Conecte bien el solenoide del embrague de popa.
b) El solenoide del embrague de popa es defectuoso b) Sustituya el solenoide del embrague de popa.
3 a) El solenoide de punto muerto es defectuoso a) Sustituya el solenoide de punto muerto.
b) El solenoide de punto muerto no está bien conectado a la caja de cambios.
b) Conecte bien el solenoide de punto muerto.
4 a) El solenoide de punto muerto está abierto. a) Conecte bien el solenoide de punto muerto.
b) El solenoide de punto muerto es defectuoso b) Sustituya el solenoide de punto muerto.
5 a) El circuito del solenoide del embrague de proa no está bien conectado a la caja de cambios.
a) Conecte bien el solenoide del embrague de proa.
b) El solenoide del embrague de proa es defectuoso. b) Sustituya el solenoide del embrague de proa.
6 a) El circuito del solenoide del embrague de proa está abierto. a) Conecte bien el solenoide del embrague de proa.
b) El solenoide del embrague de proa es defectuoso. b) Sustituya el solenoide del embrague de proa.
7 a) El solenoide de activación/desactivación de la ralentización del motor no está bien conectado a la caja de cambios.
a) Conecte bien el solenoide de activación/desactivación de la ralentización del motor.
b) El solenoide de activación/desactivación de ralentización del motor es defectuoso.
b) Sustituya el solenoide de activación/desactivación de la ralentización del motor.
8 a) El solenoide de activación/desactivación de la ralentización del motor está abierto.
a) Conecte bien el solenoide de activación/desactivación de la ralentización del motor.
b) El solenoide de activación/desactivación de ralentización del motor es defectuoso.
b) Sustituya el solenoide de activación/desactivación de la ralentización del motor.
9 a) El solenoide de activación/desactivación de la ralentización del motor no está bien conectado a la caja de cambios.
a) Conecte bien el solenoide de activación/desactivación de la ralentización del motor.
b) El solenoide del sistema de control de ralentización del motor es defectuoso.
b) Sustituya el solenoide del sistema de control de ralentización del motor.
Table 1: Mensajes de error

SOLUCIÓN DE PROBLEMAS
Appendix B-28
E rr C a u sa S o lu c ió n10 a) El solenoide de activación/desactivación de la ralentización
del motor está abierto.a) Conecte bien el solenoide de activación/desactivación de la
ralentización del motor.
b) El solenoide de activación/desactivación de ralentización del motor es defectuoso.
b) Sustituya el solenoide de activación/desactivación de la ralentización del motor.
13 El sistema de control de la estación 1 es defectuoso. Sustituya el sistema de control de la estación 1.
14 El sistema de control de la estación 2 es defectuoso. Sustituya el sistema de control de la estación 2.
15 El sistema de control de la estación 3 es defectuoso. Sustituya el sistema de control de la estación 3.
16 El sistema de control de la estación 4 es defectuoso. Sustituya el sistema de control de la estación 4.
17 El sistema de control de la estación 5 es defectuoso. Sustituya el sistema de control de la estación 5.
18 El sistema de control de la estación 6 es defectuoso. Sustituya el sistema de control de la estación 6.
19 El sistema de control de la estación 7 es defectuoso. Sustituya el sistema de control de la estación 7.
20 El sistema de control de la estación 8 es defectuoso. Sustituya el sistema de control de la estación 8.
21 a) El sistema de control de la estación 1 no está bien conectado. a) Conecte bien el sistema de control de la estación 1.
b) El sistema de control de la estación 1 es defectuoso. b) Sustituya el sistema de control de la estación 1.
22 a) El sistema de control de la estación 2 no está bien conectado. a) Conecte bien el sistema de control de la estación 2.
b) El sistema de control de la estación 2 es defectuoso. b) Sustituya el sistema de control de la estación 2.
23 a) El sistema de control de la estación 3 no está bien conectado. a) Conecte bien el sistema de control de la estación 3.
b) El sistema de control de la estación 3 es defectuoso. b) Sustituya el sistema de control de la estación 3.
24 a) El sistema de control de la estación 4 no está bien conectado. a) Conecte bien el sistema de control de la estación 4.
b) El sistema de control de la estación 4 es defectuoso. b) Sustituya el sistema de control de la estación 4.
25 a) El sistema de control de la estación 5 no está bien conectado. a) Conecte bien el sistema de control de la estación 5.
b) El sistema de control de la estación 5 es defectuoso. b) Sustituya el sistema de control de la estación 5.
26 a) El sistema de control de la estación 6 no está bien conectado. a) Conecte bien el sistema de control de la estación 6.
b) El sistema de control de la estación 6 es defectuoso. b) Sustituya el sistema de control de la estación 6.
27 a) El sistema de control de la estación 7 no está bien conectado. a) Conecte bien el sistema de control de la estación 7.
b) El sistema de control de la estación 7 es defectuoso. b) Sustituya el sistema de control de la estación 7.
28 a) El sistema de control de la estación 8 no está bien conectado. a) Conecte bien el sistema de control de la estación 8.
b) El sistema de control de la estación 8 es defectuoso. b) Sustituya el sistema de control de la estación 8.
29 a) El botón de transferencia del sistema de control de la estación 1 es defectuoso.
a) Sustituya el sistema de control.
b) El sistema de control de la estación 1 está mal conectado. b) Conecte bien el sistema de control de la estación 1.
30 a) El botón de transferencia del sistema de control de la estación 2 es defectuoso.
a) Sustituya el sistema de control.
b) El sistema de control de la estación 2 está mal conectado. b) Conecte bien el sistema de control de la estación 2.
31 a) El botón de transferencia del sistema de control de la estación 3 es defectuoso.
a) Sustituya el sistema de control.
b) El sistema de control de la estación 3 está mal conectado. b) Conecte bien el sistema de control de la estación 3.
32 a) El botón de transferencia del sistema de control de la estación 4 es defectuoso.
a) Sustituya el sistema de control.
b) El sistema de control de la estación 4 está mal conectado. b) Conecte bien el sistema de control de la estación 4.
33 a) El botón de transferencia del sistema de control de la estación 5 es defectuoso.
a) Sustituya el sistema de control.
b) El sistema de control de la estación 5 está mal conectado. b) Conecte bien el sistema de control de la estación 5.
34 a) El botón de transferencia del sistema de control de la estación 6 es defectuoso.
a) Sustituya el sistema de control.
b) El sistema de control de la estación 6 está mal conectado. b) Conecte bien el sistema de control de la estación 6.
35 a) El botón de transferencia del sistema de control de la estación 7 es defectuoso.
a) Sustituya el sistema de control.
b) El sistema de control de la estación 7 está mal conectado. b) Conecte bien el sistema de control de la estación 7.
36 a) El botón de transferencia del sistema de control de la estación 8 es defectuoso.
a) Sustituya el sistema de control.
b) El sistema de control de la estación 8 está mal conectado. b) Conecte bien el sistema de control de la estación 8.
Table 2: entorno del problema

SOLUCIÓN DE PROBLEMAS
Appendix B-29
E rr C a u sa S o lu c ió n37 a) El mazo de cables en serie tiene un exceso de 40 m. a) Vuelva a colocar el procesador de manera que el mazo de
cables en serie sea inferior a 37m.
b) El panel del circuito del procesador es defectuoso. b) Sustituya el procesador defectuoso.
c) La protección del mazo de cables en serie no está bien terminada.
c) Asegúrese de que la protección está terminada y de que la terminación se encuentra sólo en un lateral.
38 a) El mazo de cables en serie tiene un exceso de 40 m. a) Vuelva a colocar el procesador de manera que el mazo de cables en serie sea inferior a 37m.
b) Fallo en el panel del circuito del procesador. b) Sustituya el procesador defectuoso.
c) La protección del mazo de cables en serie no está bien terminada.
c) Asegúrese de que la protección está terminada y de que la terminación se encuentra sólo en un lateral.
39 a) El mazo de cables no está conectado a ningún procesador. a) Conecte el mazo de cables a todos los procesadores.
b) El mazo de cables en serie está mal conectado. b) Sustituya o corrija el cableado del mazo de cables en serie.
c) Pérdida de corriente a uno de los procesadores. c) Restaure la corriente al procesador.
40 a) El mazo de cables en serie tiene un exceso de 40 m. a) Vuelva a colocar el procesador de manera que el mazo de cables en serie sea inferior a 37m..
b) Fallo en el panel del circuito del procesador. b) Sustituya el procesador defectuoso.
c) La protección del mazo de cables en serie no está bien terminada.
c) Asegúrese de que la protección está terminada y de que la terminación se encuentra sólo en un lateral.
41 a) El mazo de cables en serie tiene un exceso de 40 m. 40 m. a) Vuelva a colocar el procesador de manera que el mazo de cables en serie sea inferior a 37m..
b) Fallo en el panel del circuito del procesador. b) Sustituya el procesador defectuoso.
c) La protección del mazo de cables en serie no está bien terminada.
c) Asegúrese de que la protección está terminada y de que la terminación se encuentra sólo en un lateral.
42 a) El mazo de cables en serie tiene un exceso de 40 m. a) Vuelva a colocar el procesador de manera que el mazo de cables en serie sea inferior a 37m.
b) Fallo en el panel del circuito del procesador. b) Sustituya el procesador defectuoso.
c) La protección del mazo de cables en serie no está bien terminada.
c) Asegúrese de que la protección está terminada y de que la terminación se encuentra sólo en un lateral.
43 a) El mazo de cables en serie tiene un exceso de 40 m. a) Vuelva a colocar el procesador de manera que el mazo de cables en serie sea inferior a 37m.
b) Fallo en el panel del circuito del procesador. b) Sustituya el procesador defectuoso.
c) La protección del mazo de cables en serie no está bien terminada.
c) Asegúrese de que la protección está terminada y de que la terminación se encuentra sólo en un lateral.
44 a) El mazo de cables no está conectado a los procesadores 1. a) Conecte el mazo de cables al procesador ID 1.
b) Ningún procesador tiene el ID 1 seleccionado. b) Identifique uno de los procesadores como ID 1 con la función “A0”.
c) Pérdida de corriente a los procesadores ID 1. c) Restaure la corriente al procesador ID 1.
45 a) Ningún procesador tiene ID 2 seleccionado en una aplicación de la doble hélice.
a) Identifique uno de los procesadores como ID 2 con la función “A0”.
b) Uno de los procesadores tiene seleccionada la doble hélice, mientras que los otras tienen seleccionada la hélice única.
b) Seleccione el funcionamiento de doble hélice en los dos procesadores con la función “A1”.
c) El mazo de cables no está conectado al procesador 2. c) Conecte el mazo de cables al procesador ID 2.
d) Pérdida de corriente al procesador ID 2. d) Restaure la corriente al procesador ID 2.
46 a) El mazo de cables en serie no está conectado al ID 3 aunque haya sido seleccionado.
a) Conecte el mazo de cables en serie al procesador ID 3.
b) Si los elementos (3) han sido seleccionados, no se ha identificado el ID 3.
b) Identifique un elemento como ID 3 con la función “A1”.
c) Pérdida de corriente al ID 3. c) Restaure la corriente al ID 3.
47 a) El mazo de cables en serie no está conectado al ID 4 aunque haya sido seleccionado.
a) Conecte el mazo de cables en serie al procesador ID 4.
b) Si los elementos (4) han sido seleccionados, no se ha identificado el ID 4.
b) Identifique un elemento como ID 4 con la función “A0”.
c) Pérdida de corriente al ID 4. c) Restaure la corriente al ID 4.
48 a) El mazo de cables en serie no está conectado al ID 5 aunque haya sido seleccionado.
a) Conecte el mazo de cables en serie al procesador ID 5.
b) Si los elementos (5) han sido seleccionados, no se ha identificado el ID 5.
b) Identifique un elemento como ID 5 con la función “A0”.
Table 2: entorno del problema

SOLUCIÓN DE PROBLEMAS
Appendix B-30
Además de los códigos de error de la lista anterior, hay diversos problemas que no tienen por qué generar necesariamente códigos de error. Los siguientes son algunos ejemplos en los que la deducción de la causa de un problema puede que no sea tan sencillo como sólo leer el código de error.
E rr C a u sa S o lu c ió nc) Pérdida de corriente al ID 5. c) Restaure la corriente al ID 5.
49 a) El mazo de cables en serie del expansor de la estación no está conectado al ID 6 aunque haya sido seleccionado.
a) Conecte el mazo de cables en serie del extensor de la estación al ID 6.
b) Si los elementos (6) han sido seleccionados, no se ha identificado el ID 6.
b) Identifique un elemento como ID 6 con la función “A0”.
c) Pérdida de corriente al ID 6. c) Restaure la corriente al ID 6.
50 a) El mazo de cables en serie del expansor de la estación no está conectado al ID 7 aunque haya sido seleccionado.
a) Conecte el mazo de cables en serie del extensor de la estación al ID 7.
b) Si los elementos (7) han sido seleccionados, no se ha identificado el ID 7.
b) Identifique un elemento como ID 7 con la función “A0”.
c) Pérdida de corriente al ID 7. c) Restaure la corriente al ID 7.
51 a) El mazo de cables en serie del expansor de la estación no está conectado al ID 8 aunque haya sido seleccionado.
a) Conecte el mazo de cables en serie del extensor de la estación al ID 8.
b) Si los elementos (8) han sido seleccionados, no se ha identificado el ID 8.
b) Identifique un elemento como ID 8 con la función “A0”.
c) Pérdida de corriente al ID 8. c) Restaure la corriente al ID 8.
52 a) El mazo de cables en serie del expansor de la estación no está conectado al ID 9 aunque haya sido seleccionado.
a) Conecte el mazo de cables en serie del extensor de la estación al ID 9.
b) Si los elementos (9) han sido seleccionados, no se ha identificado el ID 9.
b) Identifique un elemento como ID 9 con la función “A0”.
c) Pérdida de corriente al ID 9. c) Restaure la corriente al ID 9.
53 a) El mazo de cables en serie del expansor de la estación no está conectado al ID 10 aunque haya sido seleccionado.
a) Conecte el mazo de cables en serie del extensor de la estación al ID 10.
b) Si los elementos (10) han sido seleccionados, no se ha identificado el ID 10.
b) Identifique un elemento como ID 10 con la función “A0”.
c) Pérdida de corriente al ID 10. c) Restaure la corriente al ID 10.
54 a) La batería se está sobrecargando. a) Repare o sustituya el sistema de carga.
b) Existe una conexión de resistencia alta en la batería mientras se carga.
b) Limpie y/o ajuste las conexiones de la batería.
55 a) Batería defectuosa. a) Sustituya la batería.
b) La batería no se carga correctamente. b) Repare o sustituya el sistema de carga.
c) Existe una conexión de resistencia alta entre el procesador y su fuente de alimentación.
c) Repare la conexión de resistencia alta como sea necesario.
56 Se ha producido un reinicio inesperado del software o hardware. Sustituya el procesador.
57 Se ha producido un reinicio inesperado del software. Sustituya el procesador.
58 Se ha producido un reinicio inesperado del software o hardware. Sustituya el procesador.
59 Fuerte interferencia externa, como un corte de luz. Si el error tiene lugar sólo una vez, bórrelo y no lo tenga en cuenta.
Si el error es constante, sustituya el procesador.
Table 2: entorno del problema

SOLUCIÓN DE PROBLEMAS
Appendix B-31
A) SÍNTOMA Las RPM del motor varían sin mover la palanca del sistema de control (sincronización desactivada).
B) SÍNTOMA Sonido no audible en un sistema de control cuando la corriente primero se gira a “On” en el sistema de control. De lo contrario, todo funciona correctamente.
C) SINTOMA El LED rojo del sistema de control no se enciende estando al mando, pero todo lo demás funciona perfectamente.
D) SÍNTOMA No puede obtenerse el modo de calentamiento en punto muerto mientras se mueve la palanca del sistema de control en la dirección de proa, sólo en la de popa.
C A U S A S O L U C IÓ NA. PROBLEMA EN EL REGULADOR O
CARBURADOR.A. CONECTE EL CUADRO DE INICIO (Nº DE PIEZA # 13927) COMO SE MUESTRA EN EL
MANUAL DEL CUADRO DE INICIO MM13927. SI SE DETECTAN VARIACIONES, VAYA AL PASO B. SI NO SE DETECTAN VARIACIONES, CONTACTE CON UN TÉCNICO CUALIFICADO.
B. SEÑAL DE MANDO ERRÁTICA. B. CONSULTE LA SECCIÓN DE LA SEÑAL DE MANDO 1.6.1. SI TIENEN LUGAR VARIACIONES EN LOS RECUENTOS A/D, CONECTE ESE SISTEMA DE CONTROL A OTRA ESTACIÓN EN EL PROCESADOR. SI LAS VARIACIONES PERSISTEN, SUSTITUYA EL SISTEMA DE CONTROL.
C A U S A S O L U C IÓ NA. CABLE DE OCHO CONDUCTORES
CONECTADO DE FORMA INCORRECTA.
A. COMPRUEBE QUE EL CABLE NEGRO ESTÁ BIEN CONECTADO AL PIN 1 EN EL SISTEMA DE CONTROL Y AL PIN 8 EN EL PROCESADOR.
B. TRANSDUCTOR DE SONIDO DEL SISTEMA DE CONTROL DEFECTUOSO.
B. MIDA LA TENSIÓN CA EN LOS PINES 1 Y 3 DEL SISTEMA DE CONTROL. SI SE ENCUENTRA PRESENTE 20 - 25 V CA, SUSTITUYA EL SISTEMA DE CONTROL.
C A U S A S O L U C IÓ NA. CABLE DE OCHO CONDUCTORES
CONECTADO DE FORMA INCORRECTA.
A. COMPRUEBE QUE EL CABLE MARRÓN ESTÁ BIEN CONECTADO AL PIN 2 EN EL SISTEMA DE CONTROL Y AL PIN 2 EN EL PROCESADOR.
B. ABRA EL LED DEL SISTEMA DE CONTROL.
B. MIDA LA TENSIÓN CC EN LOS PINES 2 Y 3 DEL SISTEMA DE CONTROL. LA MEDIDA SERÁ DE UNOS 2,20 V CC EN FUNCIONAMIENTO NORMAL. SI SE MIDEN 4,00 V CC, EL LED ESTÁ ABIERTO. SUSTITUYA EL SISTEMA DE CONTROL.
C A U S A S O L U C IÓ NEL PROCESADOR DETECTA EL
MOVIMIENTO DE LA PALANCA DEL SISTEMA DE CONTROL EN LA DIRECCIÓN DE POPA.
PULSE EL BOTÓN DE TRANSFERENCIA MIENTRAS MUEVE LA PALANCA DEL SISTEMA DE CONTROL EN LA DIRECCIÓN DE POPA. SI EL LED PARPADEA AHORA, EL SISTEMA DE CONTROL ESTÁ MAL CONECTADO.
COMPRUEBE EL COLOR DE LOS CABLES EN LOS PINES 5 Y 7.UN SISTEMA DE CONTROL DERECHO DEBE SER AMARILLO EN EL 5 Y AZUL EN EL 7.UN SISTEMA DE CONTROL IZQUIERDO DEBE SER AZUL EN EL 5 Y AMARILLO EN EL 7.PUEDE QUE LAS SEÑALES DEL SOLENOIDE DE PROA Y DE POPA TENGAN QUE
INTERCAMBIARSE DESPUÉS DE CORREGIR.

SOLUCIÓN DE PROBLEMAS
Appendix B-32
E) SÍNTOMA Sin sonido, luz ni mando, y la pantalla no se enciende.
F) SÍNTOMA El motor comienza a girar durante la puesta en marcha y después se para. Se escucha un sonido continuo en todas las estaciones.
G) SÍNTOMA La sincronización activa no está operable.
C A U S A S O L U C IÓ N
A. SIN CORRIENTE EN EL PROCESADOR.
A. DESCONECTE EL MAZO DE CABLES DE ALIMENTACIÓN DEL PROCESADOR. MIDA LA TENSIÓN CC EN LOS PINES 10 (+) Y 11 (-) DEL ENCHUFE DEL MAZO DE CABLES. SI NO ESTÁ PRESENTE 24 V CC, COMPRUEBE LOS DISYUNTORES E INTERRUPTORES DEL CIRCUITO QUE ALIMENTAN AL PROCESADOR. CORRIJA LA FUENTE DE ALIMENTACIÓN SI ES NECESARIO.
B. POLARIDAD DE LA BATERÍA INTERCAMBIADA EN EL PROCESADOR.
B. DESCONECTE EL MAZO DE CABLES DE ALIMENTACIÓN DEL PROCESADOR. CONECTE EL CABLE ROJO DEL VOLTÍMETRO CC AL PIN 10 DEL ENCHUFE DEL MAZO DE CABLES, Y EL CABLE NEGRO AL PIN 11. SI SE MIDE UNA TENSIÓN NEGATIVA, INTERCAMBIE LOS CABLES.
C. PROCESOR DEFECTUOSO C. SI LAS CAUSAS A. Y B. NO ERAN LAS CAUSAS REALES, SUSTITUYA EL PROCESADOR.
C A U S A S O L U C IÓ N
A. LA TENSIÓN DISPONIBLE EN EL PROCESADOR HA CAÍDO DEMASIADO BAJO, DEBIDO A LAS NECESIDADES DEL LA CORRIENTE DEL MOTOR DE ARRANQUE.
A. SUMINISTRE ALIMENTACIÓN DE CORRIENTE AL PROCESADOR DE UNA BATERÍA QUE NO SEA LA DE ARRANQUE, O SUMINISTRE ALIMENTACIÓN DESDE DOS FUENTES POR MEDIO DE UN APS (SELECTOR AUTOMÁTICO DE ALIMENTACIÓN).
B. LA CARGA DE LA BATERÍA ES BAJA.
B. RECARGUE/SUSTITUYA LA BATERÍA O SUMINISTRE ALIMENTACIÓN DE BATERÍA DE DOS FUENTES POR MEDIO DE UN APS.
C A U S A S O L U C IÓ N
A. SIN SEÑALES DEL EMISOR DE CUENTAVUELTAS.
A. LA PRESENCIA DE SEÑALES DEL CUENTAVUELTAS SE PUEDE VER EN LA PANTALLA DE LECTURA. PARA OBSERVAR LA FRECUENCIA DE LA SEÑAL, SIGA LAS INSTRUCCIONES DEL MEN∨ DE DIAGNÓSTICO. EL SISTEMA TIENE PREDETERMINADA LA SINC. DEL ACELERADOR IGUAL.
B. PÉRDIDA DE COMUNICACIÓN EN SERIE.
B. EN EL CASO DE UNA PÉRDIDA DE COMUNICACIONES EN SERIE, APARECERÁN UNO O MÁS DE ESTOS CÓDIGOS DE ERROR: 31- 35.
C. LA IDENTIFICACIÓN DEL PROCESADOR NO SE HA ESTABLECIDO CORRECTAMENTE.
C. TODOS LOS PROCESADORES DEBEN TENER UN Nº DE IDENTIFICACIÓN ∨ NICO ESTABLECIDO EN EL CÓDIGO DE FUNCIÓN (A1). CONSULTE LAS SECCIONES DE CONFIGURACIÓN Y AJUSTE 5.0.
D. EL N∨ MERO CORRECTO DE MOTORES NO SE HA ESTABLECIDO.
D. ESTABLEZCA EL N∨ MERO CORRECTO DE MOTORES. CONSULTE LAS SECCIONES DE CONFIGURACIÓN Y AJUSTE 5.0.

SOLUCIÓN DE PROBLEMAS
Appendix B-33
H) SÍNTOMA El ralentí del motor y las RPM del acelerador completo son demasiado altas o demasiado bajas.
I) SÍNTOMA Al transferir el mando de una estación a otra, el mando de transfiere sólo por un lateral. No aparece ningún mensaje de error.
J) SÍNTOMA Al transferir el mando de una estación a otra, la transferencia no tiene lugar. El LED rojo no se enciende, ni siquiera un momento, y no aparece ningún mensaje de error.
C A U S A S O L U C IÓ NA. SE HA ESTABLECIDO UN PERFIL DEL
ACELERADOR QUE NO ES CORRECTO.A. ESTABLEZCA EL PERFIL DEL ACELERADOR CON EL CÓDIGO DE FUNCIÓN (E0).
CONSULTE LAS SECCIONES DE CONFIGURACIÓN Y AJUSTE 5.0.
B. LOS AJUSTES DEL RALENTÍ Y EL ACELERADOR DEBEN ESTAR BIEN.
B. AJUSTE LA ACELERACIÓN MÍNIMA CON EL CÓDIGO DE FUNCIÓN (E2) Y LA ACELERACIÓN MÁXIMA CON EL CÓDIGO DE FUNCIÓN (E3) COMO SEA NECESARIO.
C A U S A S O L U C IÓ NA. LOS MAZOS DE CABLES DEL SISTEMA DE
CONTROL ESTÁN ENCHUFADOS EN DOS ESTACIONES DIFERENTES EN UN PROCESADOR CON LA REVISIÓN.0 DEL SOFTWARE.
A. ENCHUFE LOS MAZOS DE CABLES DEL SISTEMA DE CONTROL A LAS MISMAS ESTACIONES EN LOS PROCESADORES DE BABOR Y ESTRIBOR. (EJEMPLO: ESTACIÓN 1 Y ESTACIÓN 1; ESTACIÓN 2 Y ESTACIÓN 2).
C A U S A S O L U C IÓ NA. LOS MAZOS DE CABLES DEL SISTEMA DE
CONTROL ESTÁN ENCHUFADOS EN DOS ESTACIONES DIFERENTES EN UN PROCESADOR CON LA REVISIÓN.1 DEL SOFTWARE.
A. ENCHUFE LOS MAZOS DE CABLES DEL SISTEMA DE CONTROL A LAS MISMAS ESTACIONES EN LOS PROCESADORES DE BABOR Y ESTRIBOR. (EJEMPLO: ESTACIÓN 1 Y ESTACIÓN 1; ESTACIÓN 2 Y ESTACIÓN 2)
B. EL BOTÓN DE TRANSFERENCIA ES DEFECTUOSO.
B. COMPRUEBE UN BOTÓN DE TRANSFERENCIA DEFECTUOSO ACCEDIENDO AL H0 “MEN∨ DE DIAGNÓSTICO”. SI EL 0 NO CAMBIA A 1 MIENTRAS SE PULSA EL BOTÓN DE TRANSFERENCIA, SUSTITUYA EL SISTEMA DE CONTROL.

SOLUCIÓN DE PROBLEMAS
Appendix B-34
1.9 MAZO DE CABLES
Las siguientes tablas proporcionan información acerca del cableado para los mazos de cables:
1.9.1 Corriente, Dispositivo de enclavamiento del motor de arranque
1.9.2 Corriente, enclavamiento del motor de arranque e interruptor de presión
PROCESADOR MOTOR Y BATERÍA
Figure 21: Corriente, pin del mazo de cables de enclavamiento del motor de arranque
Terminación A Color del conductor Terminación B Descripción
J11-1 Amarillo con una línea roja
Solenoide del motor de arranque
Contacto cerrado cuando se encuentra al mando o en punto muerto.
J11-10 Rojo Batería (+) + 24 V CC
J11-11 Negro Batería (-) - Retorno CCJ11-12 Amarillo
con una línea roja
Solenoide del motor de arranque
Contacto cerrado cuando se encuentra al mando o en punto muerto.
PROCESADOR MOTOR, CAMBIO DE MARCHAS Y BATERÍATerminación A Color del conductor Terminación B Descripción
J11-1 Amarillo con una línea roja
Solenoide del motor de arranque
Contacto cerrado cuando se encuentra al mando o en punto muerto.
J11-6 Azul claro Interruptor de presión de aceite del embrague
El interruptor N.A. se cierra cuando se alcanza la presión de funcionamiento de seguridad mínima del engranaje.
J11-7 Azul claro Interruptor de presión de aceite del embrague
El interruptor N.A. se cierra cuando se alcanza la presión de funcionamiento de seguridad mínima del engranaje.
Figure 22: Corriente, enclavamiento del motor de arranque y pin del mazo de cables del interruptor de
presión de aceite del embrague
J11-10 Rojo Batería (+) + 24 V CCJ11-11 Negro Batería (-) - Retorno CC
J11-12 Amarillo con una línea roja
Solenoide del motor de arranque
Contacto cerrado cuando se encuentra al mando o en punto muerto.

SOLUCIÓN DE PROBLEMAS
Appendix B-35
1.9.3 Corriente, enclavamiento del motor de arranque, interruptor de presión y alarma
1.9.4 Acelerador, PWM
1.9.5 Acelerador, tensión
PROCESADOR MOTOR, CAMBIO DE MARCHAS Y BATERÍA
Figure 23: Corriente, enclavamiento del motor de arranque, interruptor de presión de aceite del
embrague y pin del mazo de cables de la alarma
Terminación A Color del conductor Terminación B Descripción
J11-1 Amarillo con una línea roja
Solenoide del motor de arranque
Contacto cerrado cuando se encuentra al mando o en punto muerto.
J11-2 Rojo Circuito de alarma externo (+)
Máximo 20 mA
J11-3 Negro Circuito de alarma externo (-)
Máximo 20 mA
J11-6 Azul claro Interruptor de presión de aceite del embrague
El interruptor N.A. se cierra cuando se alcanza la presión de funcionamiento de seguridad mínima del engranaje.
J11-7 Azul claro Interruptor de presión de aceite del embrague
El interruptor N.A. se cierra cuando se alcanza la presión de funcionamiento de seguridad mínima del engranaje.
J11-10 Rojo Batería (+) + 24 V CCJ11-11 Negro Batería (-) - Retorno CC
J11-12 Amarillo con una línea roja
Solenoide del motor de arranque
Contacto cerrado cuando se encuentra al mando o en punto muerto.
PROCESADOR MOTOR
Figure 24: Pin del mazo de cables del acelerador PWM
Terminación A Color del conductor Terminación B Descripción
J9-1 Negro Bus CC del motor
Retorno de la señal del acelerador
J9-2 Rojo ECM Señal del acelerador PWM- 0- 100% Régimen de trabajo @ 500Hz.
J9-8 Verde/Amarillo
N/C N/A
PROCESADOR MOTOR
Figure 25: Pin del mazo de cables del acelerador de tensión
Terminación A Color del conductor
Terminación B Descripción
J9-1 Negro Bus CC del motor
Retorno de la señal del acelerador
J9-4 Rojo ECM Señal del acelerador 0,00- 5,00 V CC
J9-8 Verde/Amarillo
N/C N/A

SOLUCIÓN DE PROBLEMAS
Appendix B-36
1.9.6 Acelerador, corriente, MAN
1.9.7 Acelerador, frecuencia
1.9.8 Alimentación de corriente del embrague, proa y popa
PROCESADOR MOTOR
Figure 26: Pin del mazo de cables del acelerador de corriente
Terminación A Color del conductor
Terminación B Descripción
J9-1 Negro Bus CC del motor
Retorno de la señal del acelerador
J9-3 Rojo ECM 0,00- 21,0 mA Señal del acelerador
J9-8 Verde/Amarillo
N/C N/A
PROCESADOR MOTOR
Figure 27: Pin del mazo de cables del acelerador de frecuencia
Terminación A Color del conductor
Terminación B Descripción
J9-1 Negro Bus CC del motor
Retorno de la señal del acelerador
J9-7 Rojo ECM 120,64- 463,50 Hz Señal del acelerador
J9-8 Verde/Amarillo
N/C N/A
PROCESADOR CAJA DE CAMBIOS
Figure 28: Alimentación de corriente del embrague, pin del mazo de cables de proa y popa
Terminación A Color del conductor
Terminación B Descripción
J10-1 Rojo Fuente de alimentación +CC
+24 V CC
J10-2 Negro Fuente de alimentación -CC
Retorno -V CC
J10-3 Rojo Solenoide de proa
+ 24 V CC cuando se selecciona el embrague de proa
J10-4 Negro Solenoide de proa
Retorno - V CC para el embrague de proa
J10-5 Rojo Solenoide de popa
+ 24 V CC cuando se selecciona el embrague de popa
J10-6 Negro Solenoide de popa
Retorno - V CC para el embrague de popa

SOLUCIÓN DE PROBLEMAS
Appendix B-37
1.9.9 Alimentación de corriente del embrague, proa, punto muerto y popa
1.9.10 Alimentación de corriente del embrague, proa, popa, activación/desactivación de la ralentización del motor y mando de la ralentización del motor
PROCESADOR CAJA DE CAMBIOS
Figure 29: Embrague, proa, popa, pin del mazo de cables de punto muerto
Terminación A Color del conductor
Terminación B Descripción
J10-1 Rojo Fuente de alimentación +CC
+24 V CC
J10-2 Negro Fuente de alimentación -CC
Retorno -V CC
J10-3 Rojo Solenoide de proa
+24 V CC cuando se selecciona el embrague de proa
J10-4 Negro Solenoide del embrague de proa
Retorno - V CC para el embrague de proa
J10-5 Rojo Solenoide del embrague de popa
+24 V CC cuando se selecciona el embrague de popa
J10-6 Negro Solenoide de popa
Retorno - V CC para el embrague de popa
J10-7 Rojo Solenoide de punto muerto
+ 24 V CC todas las veces
J10-8 Negro Solenoide de punto muerto
Retorno - V CC para el solenoide de punto muerto
PROCESADOR CAJA DE CAMBIOS
Figure 30: Embrague y pin del mazo de cables del embrague/ralentización del motor
Terminación A Color del conductor
Terminación B Descripción
J10-1 Rojo Fuente de alimentación +CC
+24 V CC
J10-2 Negro Fuente de alimentación -CC
Retorno -V CC
J10-3 Rojo Solenoide del embrague de proa
+24 V CC cuando se selecciona el embrague de proa
J10-4 Negro Solenoide del embrague de proa
Retorno - V CC para el embrague de proa
J10-5 Rojo Solenoide del embrague de popa
+24 V CC cuando se selecciona el embrague de popa
J10-6 Negro Solenoide del embrague de popa
Retorno - V CC para el embrague de popa

SOLUCIÓN DE PROBLEMAS
Appendix B-38
1.9.11 Comunicación en serie
1.9.12 Sensor del cuentavueltas
1.9.13 Sistema de control
J10-9 Rojo Solenoide de activación/desactivación de la ralentización del motor
+ 24 V CC cuando la ralentización del motor está seleccionada.
J10-10 Negro Solenoide de activación/desactivación de la ralentización del motor
Retorno - V CC para el solenoide de activación/desactivación de la ralentización del motor
J10-11 Rojo Solenoide del mando de la ralentización del motor
0- 100% Régimen de trabajo @ 500 Hz para la válvula solenoide proporcional de control
J10-12 Negro Solenoide del mando de la ralentización del motor
Retorno - V CC para el solenoide de mando de la ralentización del motor
PROCESADOR PROCESADOR
Figure 31: Pin del mazo de cables de la comunicación en serie
Terminación A Color del conductor
Terminación B Descripción
J13-1 Negro J13-1 CAN bajo
J13-2 Rojo J13-2 CAN altoJ13-6 Verde/
AmarilloN/C N/A
PROCESADOR SENSOR DEL CUENTAVUELTAS
Figure 32: Pin del extremo del procesador del sensor del cuentavueltas
Terminación A Color del conductor
Terminación B Descripción
J12-2 Rojo Pin B Cuentavueltas (+)J12-3 Negro Pin C Cuentavueltas (-)
J12-4 Verde/Amarillo
N/C N/A
PROCESADOR SISTEMA DE CONTROL
Figure 33: Pin del mazo de cables del sistema de control
Terminación A Color del conductor
Terminación B Descripción
J5, 6, 7 ó 8-1
Verde/Amarillo
N/C Chasis
J5, 6, 7 ó 8-2
Marrón Pin 2 Corriente LED (2,10 a 4,20 VDC)
J5, 6, 7 ó 8-3
Violeta Pin 8 (Sólo el lado de estribor)
- Retorno de CC para LED verde
J5, 6, 7 ó 8-4
Naranja Pin 4 Selección de estación/Botón de transferencia (5,00 VCC, 0,00 VCC cuando se suelta)

SOLUCIÓN DE PROBLEMAS
Appendix B-39
J5, 6, 7 ó 8-5
Rojo Pin 5 (derecha)Pin 7 (izquierda)
Analog Ground (analógico masa)
J5, 6, 7 ó 8-6
Verde Pin 6 Señal de mando (0,60 a 4,40 VCC)
J5, 6, 7 ó 8-7
Azul Pin 7 (derecha)Pin 5 (izquierda)
VREF/Voltaje de referencia (4,80 a 5,00 VCC)
J5, 6, 7 ó 8-8
Negro Pin 1 Tono de alarma (20 a 25 VCA cuando esté presente, 20 a 25 VCC cuando no esté presente)

SOLUCIÓN DE PROBLEMAS
Appendix B-35
2.0 BORRAR EEPROM (H1)
Esta función restaura todos los parámetros a los valores predeterminados de fábrica.
NOTA: ESTA FUNCIÓN SÓLO PUEDE UTILIZARLA PERSONAL AUTORIZADO.

SOLUCIÓN DE PROBLEMAS
Appendix B-36

Manual de la unidad de prueba de servicio in situ
MM13927 Rev.C 4/03


LISTA DE REVISIONES
MM13927 Rev.C 4/03 Página 3
Lista de revisiones
R ev F ech a D escr ip c ió n d e la rev is ió n
A 11/02 1. Sección 1.0 revisada, tabla 1 revisada
B 2/03 1. Manual revisado según los estándares de manuales de ZF Mathers.2. SECCIÓN REVISADA 3.0
C 4/03 1. Sección eliminada 2.1.6

UNIDAD DE PRUEBA DE SERVICIO
MM13927 Rev.C 4/03 Página 5
1.0 INTRODUCCIÓNConsulte el Boletín 02-008 para la Unidad de prueba de servicio (número de pieza 13927) recomendaciones. Consulte la Figure 1:para ver un ejemplo de la unidad de pruebas y un multímetro.
La unidad de prueba de servicio, en adelante denominado “Cuadro de inicio”, se recomienda para su uso con todos los procesadores CruiseCommand (número de pieza 785CE) y con los procesadores ClearCommand que dispongan de conexiones (clavijas) para el acelerador, el embrague o el sistema de ralentización del motor.Los procedimientos para la comprobación de las diferentes salidas de los procesadores ClearCommand y CruiseCommand son similares, a excepción del lugar donde se conectan a su procesador correspondiente. La Figure 2: indica la ubicación de los conectores en el procesador CruiseCommand y la Figure 3: muestra las conexiones habituales en un procesador ClearCommand. No todos los procesadores ClearCommand aparecen en la Figura 3 con todas sus clavijas. Sólo aparecen las
Figure 1: Unidad de prueba de servicio (Cuadro de inicio)

UNIDAD DE PRUEBA DE SERVICIO
MM13927 Rev.C 4/03 Página 6
clavijas que se necesitan para una aplicación específica se instalan en un procesador ClearCommand.
Figure 2: Ubicaciones de conectores CruiseCommand
Figure 3: Ubicaciones de clavijas ClearCommand
Table 1: Descripciones de conectores/clavijas# D escr ip c ió n T ip o d e m a z o d e ca b les U so d e l m a zo d e ca b les
1 NEGRO DE 8 PINES
CONECTOR/CLAVIJA DEL ACELERADOR
LA SEÑAL DEL ACELERADOR SE EMITE A TRAVÉS DE ESTE CONECTOR/CLAVIJA. LA SEÑAL PUEDE TENER LA FORMA DE MODULACIÓN DE LA MAGNITUD DEL IMPULSO (PWM), TENSIÓN, CORRIENTE O FRECUENCIA
2 NEGRO DE 12 PINS
CONECTOR/CLAVIJA DE ALIMENTACIÓN
ESTE CONECTOR/CLAVIJA CONTIENE LAS ENTRADAS Y SALIDAS DE ALIMENTACIÓN PRINCIPAL DEL PROCESADOR, EL DISPOSITIVO DE ENCLAVAMIENTO DEL MOTOR DE ARRANQUE, EL DISPOSITIVO DE ENCLAVAMIENTO DE PRESIÓN DE ACEITE DEL EMBRAGUE Y EL CIRCUITO EXTERNO DE ALARMA.
3 GRIS DE 12 PINS CONECTOR/CLAVIJA DEL EMBRAGUE
LAS CONEXIONES EXTERNAS PARA LA ALIMENTACIÓN DEL EMBRAGUE, LOS SOLENOIDES DE PROA, POPA Y PUNTO MUERTO, LOS SOLENOIDES DE ACTIVACIÓN Y DESACTIVACIÓN DE LA RALENTIZACIÓN DEL MOTOR Y EL SOLENOIDE PROPORCIONAL SE REALIZAN EN ESTE CONECTOR/CLAVIJA.
4 GRIS DE 8 PINS CONECTOR DEL SISTEMA DE CONTROL
TODAS LAS CONEXIONES NECESARIAS PARA LAS ESTACIONES DE CONTROL REMOTO SE REALIZAN EN ESTOS CONECTORES.
5 GRIS DE 6 PINS CONECTOR/CLAVIJA DE COMUNICACIÓN EN SERIE
LAS CONEXIONES DE COMUNICACIÓN EN SERIE ENTRE VARIOS PROCESADORES PARA APLICACIONES CON MÁS DE UN PROCESADOR SE REALIZAN EN ESTE CONECTOR/CLAVIJA.
6 GRIS DE 4 PINS CONECTOR/CLAVIJA DEL SENSOR DEL CUENTAVUELTAS
LA SEÑAL DE ENTRADA DE UN CUENTAVUELTAS O DEL SENSOR DE VELOCIDAD DEL EJE SE CONECTA A ESTE CONECTOR/CLAVIJA.
11339-Example
3
1
6
2
5

UNIDAD DE PRUEBA DE SERVICIO
MM13927 Rev.C 4/03 Página 7
2.0 PROCEDIMIENTOLos procedimientos para la utilización del cuadro de inicio son los mismos para los procesadores CruiseCommand y ClearCommand. No obstante, el ajuste interno del procesador para obtener la salida correcta puede ser diferente. Debe consultarse el manual de instalación adecuado para realizar dichos ajustes.
2.1 COMPROBACIÓN DE SEÑAL DEL ACELERADORDependiendo de qué procesador esté comprobando, puede realizar mediciones de uno o todos estos valores: Tensión CC, corriente, PWM (modulación de magnitud del impulso) o frecuencia.
2.1.1 Tensión CCA) Asegúrese de que no llega alimentación al sistema electrónico
del motor ni al procesador.B) Desconecte el mazo de cables del acelerador del conector/
clavija número 1 del procesador.C) Inserte el cuadro de inicio entre el conector/clavija número 1
del procesador y el mazo de cables del acelerador, tal y como se muestra en la Figure 4:.
NOTA: LOS SIGUIENTES PROCEDIMIENTOS Y DIBUJOS PERTENECEN TANTO A LOS PROCESADORES CRUISECOMMAND COMO A LOS PROCESADORES CLEARCOMMAND.
Figure 4: Conexión del acelerador (Tensión CC)

UNIDAD DE PRUEBA DE SERVICIO
MM13927 Rev.C 4/03 Página 8
D) Ajuste el multímetro para medir voltaje de corriente continua (CC) y conecte el terminal negro en la toma negra con la etiqueta “-” del cuadro de inicio, y el terminal rojo en la toma con la etiqueta “VDC” (VCC).
E) Active el suministro de alimentación al procesador y tome el mando en una estación remota.
F) En este momento, debería medirse la tensión al ralentí de la aplicación.
G) Desplace la palanca del sistema de control a la posición de máxima aceleración mientras pulsa el botón de transferencia (modo de sólo aceleración).
H) En este momento, debería medirse la tensión a máxima aceleración de la aplicación.
2.1.2 Corriente (mA)A) Asegúrese de que no llega alimentación al sistema electrónico
del motor ni al procesador.B) Desconecte el mazo de cables del acelerador del conector/
clavija número 1 del procesador.C) Inserte el cuadro de inicio entre el conector/clavija número 1
del procesador y el mazo de cables del acelerador, tal y como se muestra en la Figure 5:.
D) Ajuste el multímetro para medir la corriente (mA) y conecte el terminal negro en la toma negra con la etiqueta “-” del cuadro
Figure 5: Conexión del acelerador (Corriente mA)

UNIDAD DE PRUEBA DE SERVICIO
MM13927 Rev.C 4/03 Página 9
de inicio, y el terminal rojo en la toma con la etiqueta “mA” (miliamperios).
E) Active el suministro de alimentación al procesador y tome el mando en una estación remota.
F) Mantenga pulsado el interruptor de botón con la etiqueta “mA”. Debería medirse la corriente (mA) adecuada para la aplicación.
G) Desplace la palanca del sistema de control a la posición de máxima aceleración mientras pulsa el botón de transferencia (modo de sólo aceleración).
H) Mantenga pulsado el botón “mA”. En este momento, debería medirse la corriente a máxima aceleración (mA) de la aplicación.
2.1.3 PWM (modulación de magnitud del impulso) con voltímetro CCA) Asegúrese de que no llega alimentación al sistema electrónico
del motor ni al procesador.B) Desconecte el mazo de cables del acelerador del conector/
clavija número 1 del procesador.C) Inserte el cuadro de inicio entre el conector/clavija número 1
del procesador y el mazo de cables del acelerador, tal y como se muestra en la Figure 6:.
Figure 6: Conexión del acelerador (PWM con voltímetro CC)

UNIDAD DE PRUEBA DE SERVICIO
MM13927 Rev.C 4/03 Página 10
D) Ajuste el multímetro para medir voltaje de corriente continua (CC) y conecte el terminal negro en la toma negra con la etiqueta “-” del cuadro de inicio, y el terminal rojo en la toma con la etiqueta “PWM”.
E) Active el ECM (módulo de control electrónico) Caterpillar únicamente. No aplique alimentación al procesador en este momento.
F) Dependiendo del tipo de ECM Caterpillar (PEEC o ADEMS), la medición debería ser, aproximadamente, 5,00 ó 12,00 VCC. Guarde la medición tal y como se muestra en el dibujo de la Figure 6:.
G) Active el suministro de alimentación al procesador y tome el mando en una estación remota.
H) Guarde ahora la tensión CC. La medición debería ser el 7-9% de la tensión medida en el paso f).
I) Desplace la palanca del sistema de control a la posición de máxima aceleración mientras pulsa el botón de transferencia (modo de sólo aceleración).
J) La medición debería ser el 91- 93% del voltaje medido en el paso F) [por ejemplo: ralentí = 8% de 12 VCC de referencia o 0,96 VCC; aceleración máxima = 92% de 12 VCC de referencia o 11,04 VCC.
2.1.4 PWM (modulación de magnitud del impulso) con medidor de régimen de trabajoA) Asegúrese de que no llega alimentación al sistema electrónico
del motor ni al procesador.B) Desconecte el mazo de cables del acelerador del conector/
clavija número 1 del procesador.

UNIDAD DE PRUEBA DE SERVICIO
MM13927 Rev.C 4/03 Página 11
C) Inserte el cuadro de inicio entre el conector/clavija número 1 del procesador y el mazo de cables del acelerador, tal y como se muestra en la Figure 7:.
D) Ajuste el multímetro para medir el régimen de trabajo y conecte el terminal negro en la toma negra con la etiqueta “-” del cuadro de inicio, y el terminal rojo en la toma con la etiqueta “PWM”.
E) Active el ECM (módulo de control electrónico) Caterpillar y el procesador.
F) La medición debería ser, aproximadamente, un 8% del régimen de trabajo.
G) Desplace la palanca del sistema de control a la posición de máxima aceleración mientras pulsa el botón de transferencia (modo de sólo aceleración).
H) La medición debería incrementarse del 8% al 91-93%.
2.1.5 Frecuencia (Hz)A) Asegúrese de que no llega alimentación al sistema electrónico
del motor ni al procesador.B) Desconecte el mazo de cables del acelerador del conector/
clavija número 1 del procesador.
Figure 7: Conexión del acelerador (PWM con medidor de régimen de trabajo)

UNIDAD DE PRUEBA DE SERVICIO
MM13927 Rev.C 4/03 Página 12
C) Inserte el cuadro de inicio entre el conector/clavija número 1 del procesador y el mazo de cables del acelerador, tal y como se muestra en la Figure 8:
D) Ajuste el multímetro para medir la frecuencia y conecte el terminal negro en la toma negra con la etiqueta “-” del cuadro de inicio, y el terminal rojo en la toma con la etiqueta “FREQ”.
E) Active el suministro de alimentación al procesador y tome el mando en una estación remota.
F) En este momento, debería medirse la frecuencia al ralentí de la aplicación.
G) Desplace la palanca del sistema de control a la posición de máxima aceleración mientras pulsa el botón de transferencia (modo de sólo aceleración).
H) En este momento, debería medirse la frecuencia a máxima aceleración de la aplicación.
Figure 8: Conexión del acelerador (Frecuencia CC)

UNIDAD DE PRUEBA DE SERVICIO
MM13927 Rev.C 4/03 Página 12
2.2 COMPROBACIÓN DEL EMBRAGUE
2.2.1 Comprobación del solenoide de punto muertoA) Asegúrese de que no llega alimentación tanto al procesador,
como a la fuente de alimentación del embrague.B) Desconecte el mazo de cables del embrague del conector/
clavija número 3 del procesador.C) Inserte el cuadro de inicio entre el conector/clavija número 3
del procesador y el mazo de cables del embrague, tal y como se muestra en la Figure 9:.
D) Active la alimentación del procesador (“On”) y tome el control en cualquier estación remota con la palanca del sistema de control en la posición de punto muerto/ralentí.
E) La medición en el indicador de comprobación de punto muerte debería ser 12 ó 24 VCC, dependiendo de la capacidad del solenoide y el LED situado a su lado debería iluminarse.
F) Mueva la palanca del sistema de control hasta la posición de bloqueo de proa. La tensión debería bajar hasta 0 VCC en los sistemas CruiseCommand y permanecer a 12 ó 24 VCC en los sistemas ClearCommand. El LED situado a su lado debería apagarse en los sistemas CruiseCommand y permanecer encendido en los sistemas ClearCommand.
Figure 9: Conexión del embrague (solenoide de punto muerto)

UNIDAD DE PRUEBA DE SERVICIO
MM13927 Rev.C 4/03 Página 13
2.2.2 Comprobación del solenoide de proaA) Asegúrese de que no llega alimentación tanto al procesador,
como a la fuente de alimentación del embrague.B) Desconecte el mazo de cables del embrague del conector/
clavija número 3 del procesador.C) Inserte el cuadro de inicio entre el conector/clavija número 3
del procesador y el mazo de cables del embrague, tal y como se muestra en la Figure 10:.
D) Ajuste el multímetro para medir voltaje de corriente continua (CC) y conecte el terminal negro en la toma con la etiqueta “CLUTCH” (embrague) del cuadro de inicio, y el terminal rojo en la toma con la etiqueta “AHEAD” (proa).
E) Active la alimentación del procesador (“On”) y tome el control en cualquier estación remota con la palanca en la posición de punto muerto/ralentí.
F) La medición debería dar como resultado 0 VCC y el LED situado a su lado no debería iluminarse.
G) Coloque la palanca del sistema de control en la posición de bloqueo de proa. La medición debería ser 12 ó 24 VCC dependiendo de la capacidad del solenoide de proa. EL LED adyacente al conector AHEAD (proa) del cuadro de inicio debería iluminarse.
H) Vuelva a colocar las palancas del sistema de control en la posición de punto muerto/ralentí.
Figure 10: Conexión del embrague (solenoide de proa)

UNIDAD DE PRUEBA DE SERVICIO
MM13927 Rev.C 4/03 Página 14
2.2.3 Comprobación del solenoide de popaA) Asegúrese de que no llega alimentación tanto al procesador,
como a la fuente de alimentación del embrague.B) Desconecte el mazo de cables del embrague del conector/
clavija número 3 del procesador.C) Inserte el cuadro de inicio entre el conector/clavija número 3
del procesador y el mazo de cables del embrague, tal y como se muestra en la Figure 11:.
D) Ajuste el multímetro para medir voltaje de corriente continua (CC) y conecte el terminal negro en la toma con la etiqueta “CLUTCH” (embrague) del cuadro de inicio, y el terminal rojo en la toma con la etiqueta “ASTERN” (popa).
E) Active la alimentación del procesador (“On”) y tome el control en cualquier estación remota con la palanca del sistema de control en la posición de punto muerto/ralentí.
F) La medición debería dar como resultado 0 VCC y el LED situado a su lado no debería iluminarse.
G) Coloque la palanca del sistema de control en la posición de bloqueo de popa. La medición debería ser 12 ó 24 VCC dependiendo de la capacidad del solenoide de popa. EL LED adyacente al conector ASTERN (popa) del cuadro de inicio debería iluminarse.
H) Vuelva a colocar las palancas del sistema de control en la posición de punto muerto/ralentí.
Figure 11: Conexión del embrague (solenoide de popa)

UNIDAD DE PRUEBA DE SERVICIO
MM13927 Rev.C 4/03 Página 15
2.3 COMPROBACIÓN DE LA RALENTIZACIÓN DEL MOTOR
2.3.1 Solenoide de activación/desactivación de la ralentización del motorA) Asegúrese de que no llega alimentación tanto al procesador,
como a la fuente de alimentación del embrague.B) Desconecte el mazo de cables del embrague del conector/
clavija número 3 del procesador.C) Inserte el cuadro de inicio entre el conector/clavija número 3
del procesador y el mazo de cables del embrague, tal y como se muestra en la Figure 12:.
D) Ajuste el multímetro para medir el voltaje de corriente continua (CC) y conecte el terminal negro en la toma con la etiqueta “CLUTCH” (embrague) y el terminal rojo en la toma con la etiqueta “TROLL ON/OFF” (activar/desactivar el sistema de ralentización del motor), tal y como se muestra en la Figure 12:.
E) Active la alimentación del procesador (“On”) y de la fuente de alimentación del embrague y tome el control en cualquier estación remota con la palanca del sistema de control en la posición de punto muerto/ralentí.
F) Pulse el botón Transfer (transferencia) durante unos 2 segundos hasta que el LED rojo comience a parpadear de forma rápida (indicación de modo de ralentización del motor).
G) La medición debería ser 0 VCC.
Figure 12: Conexión del sistema de ralentización del motor (solenoide de activación/desactivación ON/OFF)

UNIDAD DE PRUEBA DE SERVICIO
MM13927 Rev.C 4/03 Página 16
H) Coloque la palanca del sistema de control en la posición de bloqueo de proa. La medición debería ser ahora de 12 ó 24 VCC, dependiendo de la capacidad del solenoide.
I) Coloque la palanca del sistema de control más hacia adelante mientras controla el voltímetro de corriente continua (CC). La medición debería ir de 12 ó 24 VCC hasta 0 VCC al mismo tiempo que se ilumina de forma continuada el LED del sistema de control.
2.3.2 Comprobación del sistema de control de ralentización del motor (solenoide proporcional) con un amperímetroA) Asegúrese de que no llega alimentación tanto al procesador,
como a la fuente de alimentación del embrague.B) Desconecte el mazo de cables del embrague del conector/
clavija número 3 del procesador.C) Inserte el cuadro de inicio entre el conector/clavija número 3
del procesador y el mazo de cables del embrague, tal y como se muestra en la Figure 13:.
D) Ajuste el multímetro para medir (mA.) y conecte el terminal negro a la toma negra y el terminal rojo a la toma roja con la etiqueta “TROLL COMMAND” (sistema de control de ralentización del motor), tal y como se muestra en la Figure 13:.
E) Active la alimentación del procesador (“On”) y de la fuente de alimentación del embrague y tome el control en cualquier
Figure 13: Conexión del sistema de ralentización (solenoide proporcional con amperímetro)

UNIDAD DE PRUEBA DE SERVICIO
MM13927 Rev.C 4/03 Página 17
estación remota con la palanca del sistema de control en la posición de punto muerto/ralentí.
F) Pulse el botón Transfer (transferencia) durante unos 2 segundos hasta que el LED rojo del sistema de control comience a parpadear de forma rápida (indicación de modo de ralentización del motor).
G) Gire el interruptor hasta la posición más alejada de “Troll Command” (sistema de control de ralentización del motor).
H) Mueva la palanca del sistema de control hasta la posición de bloqueo de proa. La medición de corriente debería ser el valor correcto para la presión de embrague mínima (rotaciones del eje). Este valor varía dependiendo del tipo de transmisión marina. Consulte la documentación suministrada junto a la válvula de ralentización del motor y junto al procesador para obtener datos concretos.
I) Lentamente, avance la palanca del sistema de control al mismo tiempo que controla la corriente. La corriente debería aumentar o disminuir, dependiendo del tipo de transmisión, en proporción con el movimiento de la palanca del sistema de control. De nuevo, consulte la documentación suministrada junto a la válvula de ralentización del motor y junto al procesador para obtener datos concretos.
J) Siga desplazando la palanca del sistema de control hacia adelante hasta que el LED rojo deje de parpadear (permanezca encendido de forma continuada). La corriente debería bajar hasta 0 mA.
3.0 Lista de piezasTable 2: Lista de piezas
N o m b re d e p ieza N ú m ero d e p ieza Z F M a th ers
UNIDAD DE PRUEBA DE REPARACIÓN 13927
MANUAL TÉCNICO MM13927
MULTÍMETRO
SISTEMA DE CONTROL DE COMPROBACIÓN - DUAL 14000

UNIDAD DE PRUEBA DE SERVICIO
MM13927 Rev.C 4/03 Página 18