Embed Size (px)
Citation preview

Crack propagation in concrete dams
driven by internal water pressure
José Sanchez Loarte & Maria Sohrabi
June 2017
TRITA-BKN. Master Thesis 522, Concrete Structures 2017
ISSN 1103-4297,
ISRN KTH/BKN/EX-522-SE

© José Sanchez Loarté & Maria Sohrabi 2017
Royal Institute of Technology (KTH)
Department of Civil and Architectural Engineering
Division of Concrete Structures
Stockholm, Sweden, 2017

iii
Abstract
Concrete structures are in general expected to be subjected to cracking during its service life.
This is the reason why concrete is reinforced, where the reinforcement is only activated after
cracks occur. However, cracks may be a concern in large concrete structures, such as dams,
since it may result in reduced service life. The underlying mechanisms behind crack
formations are well known at present day. On the other hand, information concerning the
crack condition over time and its influence on the structure is limited, such as the influence of
water pressure within the cracks.
The aim of this project is to study crack propagation influenced by water pressure and to
define an experimental test setup that allows for crack propagation due to this load. Numerical
analyses have been performed on an initial cracked specimen to study the pressure along the
crack propagation. The finite element method has been used as the numerical analysis tool,
through the use of the software ABAQUS. The finite element models included in these studies
are based on linear or nonlinear material behavior to analyze the behavior during a
successively increasing load.
The numerical results show that a crack propagates faster if the water is keeping up with the
crack extension, i.e. lower water pressure is required to open up a new crack. When the water
does not have time to develop within the crack propagation, more pressure is required to open
up a new crack. The experimental results show that the connection between the water inlet
and the specimen is heavily affected by the bonding material. In addition, concrete quality and
crack geometry affects the propagation behavior.
Keywords: Concrete cracks, water pressure, concrete dams, crack propagation, finite element
analysis, linear elastic fracture mechanics, instrumentation.

iv

v
Sammanfattning
Betongkonstruktioner förväntas i allmänhet att utsättas för sprickbildning under dess
livslängd. Detta är anledningen till att betong armeras, där armeringen endast aktiveras efter
sprickbildning. Sprickor kan orsaka problem även hos stora betongkonstruktioner, såsom i
dammar exempelvis, eftersom dessa kan leda till minskad livslängd. De bakomliggande
mekanismerna till sprickbildning är välkända idag. Emellertid är information om
sprickförhållandet över tiden och dess inverkan på strukturen begränsad, såsom inverkan av
vattentryck i sprickor.
Huvudsyftet med detta projekt är att studera spricktillväxten orsakad av vattentryck, samt att
definiera en provningsmetod som tillåter spricktillväxt på grund av denna last. Numeriska
analyser har utförts på en sprucken provkropp i syfte att studera vattentrycket längs sprick-
propageringen. Finita element metoden har använts som verktyg för de numeriska analyserna,
genom det kommersiellt använda programmet ABAQUS. De finita element modellerna
inkluderade i dessa studier är baserade på linjär- eller icke-linjär material-beteende, som
möjliggör analyser över beteendet under en successivt ökande last påfrestning.
De numeriska resultaten visar att en spricka växer fortare om vattnet hinner ikapp
spricktillväxten, vilket innebär att ett lägre tryck krävs för att öppna upp en ny spricka. När
vattnet inte har tid att utvecklas och avancera under spricktillväxten krävs det mer tryck för att
öppna upp en ny spricka. De experimentella resultaten visar att kontakten mellan
vatteninsläpp och provkropp är kraftigt påverkad av bindemedlet. Dessutom påverkas
spricktillväxten av betong kvalitet och sprick geometri.
Nyckelord: Sprickor i betong, vattentryck, betongdammar, spricktillväxt, finita element
analyser, linjär elastisk frakturmekanik, utrustning

vi

vii
Preface
The research presented was carried out as a part of “Swedish Hydropower Centre – SVC”.
SVC has been established by the Swedish Energy Agency, Elforsk and Svenska Kraftnät in
collaboration with Chalmers University of Technology, KTH Royal Institute of Technology,
Luleå University of Technology and Uppsala University. www.svc.nu.
During the period of January to June 2017, the research was conducted at Sweco Energuide
AB and the Department of Concrete Structures at the Royal Institute of Technology (KTH).
The project was initiated by Dr. Richard Malm, who also supervised the project, together with
Dr. Lamis Ahmed and Adj. Prof. Manouchehr Hassanzadeh.
We would like to thank Dr. Richard Malm for his guidance, support and advice throughout
this project. Furthermore, we would like to express our sincere gratitude to Dr. Lamis Ahmed
for taking her invaluable time and support throughout the project at KTH.
We would also like to address our genuine appreciation to Adjunct Prof. Manouchehr
Hassanzadeh at Sweco for his advice and for sharing his knowledge with us.
Alongside our supervisors, we would also like to express our sincere gratitude to Ph.D.
student Ali Nejad Ghafar at KTH and Research Assistant Patrick Rogers at CBI for their
voluntary time and help throughout the experiment.
Finally, we would also like to thank Johan Blomdahl for giving us the opportunity to carry
out the project at Sweco Energuide AB and KTH for giving us the opportunity to perform the
experiment.
Stockholm, June 2017
José Sanchez Loarte & Maria Sohrabi

viii

ix
Contents
Abstract .................................................................................................................................... iii
Sammanfattning ....................................................................................................................... v
Preface ..................................................................................................................................... vii
1 Introduction ...................................................................................................................... 1
1.1 Background ......................................................................................................... 1
1.2 Aim and scope .................................................................................................... 2
1.3 Limitations .......................................................................................................... 2
1.4 Outline .................................................................................................................. 3
2 Concrete cracks ................................................................................................................ 5
2.1 Types of cracks .................................................................................................. 5
2.2 Compressive behavior of concrete ............................................................. 7
2.3 Crack propagation ........................................................................................... 8
2.3.1 Tensile behavior of concrete ................................................................................. 8
2.3.2 Fracture mechanics ................................................................................................. 10
2.3.3 Linear elastic fracture mechanics (LEFM) ..................................................... 12
2.4 Fluid in cracks ................................................................................................. 16
2.4.1 Fluid flow in cracks ................................................................................................ 17
2.4.2 Fluid pressure in cracks ........................................................................................ 18
2.5 Effects from cracking .................................................................................... 20
3 Finite element method ................................................................................................... 23
3.1 Material models ............................................................................................... 23
3.1.1 Discrete crack approach ........................................................................................ 23
3.1.2 Smeared crack approach ........................................................................................ 24
3.2 Crack modelling .............................................................................................. 25
3.2.1 Debond using VCCT ............................................................................................... 25
3.2.2 Cohesive behavior ................................................................................................... 26
3.3 Pre-defined crack modelling ...................................................................... 29
3.3.1 Contour integral evaluation ................................................................................. 29
3.4 Interactions ....................................................................................................... 33
3.5 Loading ............................................................................................................... 37

x
4 Numerical modelling...................................................................................................... 39
4.1 Geometry ............................................................................................................ 39
4.2 Material properties ........................................................................................ 40
4.2.1 Non-linear material properties ............................................................................ 41
4.3 Loads ................................................................................................................... 41
4.4 Interface and boundary conditions ......................................................... 42
4.5 Meshing ............................................................................................................... 43
5 Experimental Test .......................................................................................................... 45
5.1 Test specimen ................................................................................................... 45
5.2 Instrumentation ............................................................................................... 45
5.3 Experimental procedure .............................................................................. 49
6 Results ............................................................................................................................. 55
6.1 Numerical results ............................................................................................ 55
6.1.1 Mode I failure ........................................................................................................... 55
6.1.2 Internal pressure ...................................................................................................... 56
6.1.3 Water pressure distribution .................................................................................. 59
6.2 Experimental results ..................................................................................... 60
7 Conclusions and further research ................................................................................ 63
7.1 Conclusions ....................................................................................................... 63
7.1.1 Numerical simulations ........................................................................................... 63
7.1.2 Test setup ................................................................................................................... 64
7.2 Further research ............................................................................................. 64
Bibliography ........................................................................................................................... 67
Appendix A ............................................................................................................................. 71
Figures .......................................................................................................................... 71
A.1 Mesh of the finite element models ............................................................................ 71
A.2 Stress distribution along crack propagation ........................................................... 75
A.3 Tomography pictures ...................................................................................................... 76

1
1 Introduction
1.1 Background
Cracks in concrete are in general expected to form during the service life of the structure. Due
to this issue, the concrete is reinforced. Cracking may be a concern in large concrete
structures, such as concrete dams, since it may reduce the service life of the structure. Cracks
in dams come in different shapes and propagation patterns which may differ based on the type
of the dam. The mechanisms causing crack formations in dams are the same as in other
concrete structures and easily recognized and identified. However, there is limited knowledge
when evaluating the condition of cracks over time and its influence on the structure.
(Hassanzadeh and Westberg, 2016)
One of the mechanisms that potentially may have influence is water pressure within cracks.
The unilateral magnitude of the pressure in an existing crack is influenced in the same way as
the uplift pressure on the interface between foundation and rock material. The magnitude of
water pressure is important for existing cracks to propagate and the knowledge is limited and
usually not taken into consideration in structural design. (Hassanzadeh, 2017)
Cracks in concrete structures give rise to several durability problems such as; leaching,
corrosion of the reinforcement and reduced mechanical strength. These consequences may
eventually lead to structural failure. (Hassanzadeh and Westberg, 2016) In order to prevent
this, it is important to obtain more knowledge of the crack condition under the influence of
water pressure.
Numerical models based on the finite element method (FEM), have been used to simulate
crack propagation under water pressure loads. For the determination of the propagating
behavior caused by water pressure, failure analyses have been carried out according to linear
and nonlinear fracture mechanics. An experimental setup has been defined that allows for
studying the behavior of crack propagation in concrete due to water pressure.

2
1.2 Aim and scope
The purpose of this project is to investigate and evaluate how crack propagation behaves
under the influence of water pressure. This is performed by finite element analyses and an
experimental test.
The first step is to design the experiment model with the numerical software ABAQUS.
Within this step, a parametric study is carried out to define allowable pressure magnitudes to
propagate a crack. The crack propagation in the numerical model is approximated by using
the contour integral method and the discrete crack approach. However, water pressure is the
main factor to cause the propagating behavior at the crack plane and this can be approximated
by adapting an iterative process in the analyses.
The second step is the performing of the experimental test, where different experimental
designs can be performed to reach the optimal test setup. The last step is to evaluate and to
compile the results.
The research questions to be answered within this project are the following:
How should the fracture process be simulated with consideration of intruding water
pressure?
Following a crack propagation, how is the water pressure distributed along the crack?
How could an experimental test setup be defined that allows for study of crack
propagation due to water pressure?
1.3 Limitations
In the experimental study, tests and simulations have been made on pre-defined
specimens. In real applications, cracks in concrete structures can be affected by
several factors such as corrosion residual products and efflorescence that may fill the
cracks. Size effects may also have an influence on the results.
Crack propagation has been simulated with one method, the discrete crack approach.
The research has tended to focus on successively increasing loads.

3
1.4 Outline
The content of this report is presented below to give an overview of the structure of this
project.
Chapter 2, includes the general theory and background of concrete cracks associated with
water pressure. Furthermore, it describes the theories behind fracture mechanics.
Chapter 3, contains general theory regarding the numerical analyses and nonlinear material
behavior of concrete.
Chapter 4, presents the numerical model with descriptions of its attributes.
Chapter 5, presents the process of the experimental test. A brief description of the specimen
and instrumentation is presented.
Chapter 6, compiles the results from the numerical modelling and the experimental test.
Chapter 7, presents the conclusions of this study, followed by suggestions for further research.

4

5
2 Concrete cracks
2.1 Types of cracks
Concrete is a brittle material with low tensile strength and poor toughness, where different
types of cracks can develop. Crack development affects the structural strength and lifetime of
concrete structures. (Benarbia and Benguediab, 2015)
A crack can be defined as an interface and/or a gap within a structure or between two
geometrical bodies in a structure. The geometrical bodies that surround the crack can spread
apart or displace from each other without any subjected force.
Cracks in concrete occur in different stages and can be divided into two categories; Pre-
hardening cracks and post-hardening cracks. There are two defined types of pre-hardened
cracks: Plastic and constructional movement. Crack types of great importance before the
hardening of the concrete is the plastic settlement and plastic shrinkage.
The post-hardening cracks occur through physical, chemical, thermal and structural processes.
In Table 2.1, a list of concrete cracks, and some of their possible causes are presented.
Table 2.1: Common crack types in concrete. Modified from Hassanzadeh and Westberg (2016).
Types of cracks Causes
Pre-hardening cracks
Plastic
- Plastic settlement
- Plastic shrinkage
Constructional
movement
- Movement in formwork
- Sub-grade movement
Post-hardening cracks
Physical - Shrinkable aggregates
- Drying shrinkage
- Crazing
Chemical - Corrosion of reinforcement
- Alkali-aggregate reactions
- Cement carbonation
Thermal - Freeze thaw damage
- Weathering
Structural - Overload
- Design loads
Some of the cracks mentioned in Table 2.1 are illustrated in the following figures. Figure 2.1
illustrates a crack caused by plastic settlement. The plastic settlement is caused by water
separation which often occurs around the location of the reinforcement. Due to the water
separation of freshly poured concrete, the solid parts of the concrete sinks and get blocked by

6
the reinforcement which leads to crack formation. These cracks usually follow the direction of
the reinforcement. (Hassanzadeh and Westberg, 2016)
Figure 2.1: Crack caused by plastic settlement, from Hassanzadeh and Westberg (2016).
Figure 2.2 illustrates cracks caused by plastic shrinkage. Plastic shrinkage occurs due to high
water evaporation which causes the concrete surface to dry and shrink. These cracks appear
on the surface of concrete while it is still fresh and plastic. They are usually appearing as
several parallel cracks that are shallow and primarily occurring on horizontal surfaces.
(NRMCA, 2014)
Figure 2.2: Cracks caused by plastic shrinkage, from NRMCA (2014).
Cracks caused by crazing can be seen in Figure 2.3. Crazing often occurs due to shrinkage of
the cement paste layer at the surface. Craze cracks can also occur due to poor concrete
practices. These cracks are a growth of fine random cracks or fissures that appear on the
surface of concrete, mortar or cement paste. (NRMCA, 2009)

7
Figure 2.3: Crack caused by crazing, from ACI (2008).
2.2 Compressive behavior of concrete
The compressive strength of concrete is defined as the peak value of the nominal stress of a
specimen subjected to a uniaxial compressive load test. The response of the concrete can be
considered as linear elastic at early stages, i.e. 30-40% of 𝑓𝑐𝑚, where 𝑓𝑐𝑚 is the mean value of
the compressive strength. The formation of micro cracks initiates at this early stage in which
energy is consumed and resulting in a decreased stiffness of the material. From this point, the
material behaves nonlinear, i.e. the stress-strain curve gradually increases until reaching 70-
75% of the ultimate value of 𝑓𝑐𝑚. This results in bond cracks between the aggregates and
cement paste caused by the strains orthogonal to the applied load. From this point, further
loading results in a significant reduction of the stiffness and the material response is defined
as “softening” behavior. The crushing failure occurs at the ultimate strain. (Malm, 2016a)
Figure 2.4 illustrates the typical behavior of concrete subjected to uniaxial compressive
loading.
Figure 2.4: Stress-strain curve of uniaxial compressive loading, from Malm (2016).

8
The non-linear stress-strain relationship can be described by the following equations, in
accordance with Eurocode 2 (2004):
𝜎𝑐
𝑓𝑐𝑚=
𝜅𝜂 − 𝜂2
1 + (𝜅 − 2)𝜂 (2.1)
𝜂 =휀𝑐
휀𝑐1 (2.2)
𝜅 = 1.05𝐸𝑐𝑚
휀𝑐
𝑓𝑐𝑚 (2.3)
where,
휀𝑐 is the compressive strain [-]
휀𝑐1 is the strain at peak compressive stress 𝑓𝑐𝑚, [Pa]
휀𝑐𝑢1 is the ultimate strain [-]
𝜎𝑐 is the compressive stress in concrete [Pa]
𝑓𝑐𝑚 is the mean value of concrete cylinder compressive strength [Pa]
𝐸𝑐𝑚 is the mean elastic modulus [Pa]
𝜅 is a factor describing the actual stress compared to the compressive strength 𝑓𝑐𝑚
𝜂 is a ratio of the compressive strain and the strain at peak compressive stress
2.3 Crack propagation
Crack initiation is a response of local damage in the previously un-cracked material.
Extending or growing of this initial crack due to exceeding of the materials failure strength is
called crack propagation. (Shen et.al, 2014) Propagation of cracks in materials is described
with the field of fracture mechanics.
2.3.1 Tensile behavior of concrete
The tensile behavior of a porous concrete material is brittle. The tensile failure is initiated by
micro-cracks with increasing size and number and finally merging to a macro-crack, i.e.
creating a visible actual crack. Micro-cracks are the response to local damage in the material
and are initiated in the weakened zones where the stress concentrations are high e.g. between
aggregates and cement paste. The material response of a specimen subjected to a uniaxial
tensile load is initially linear elastic up to a level just before reaching the tensile strength 𝑓𝑡.
When the applied load increases past this level i.e. at the level of 𝜎 = 𝑓𝑡 the specimen reaches
failure and is divided in two separate parts, see Figure 2.5. Before reaching the tensile
strength, the extent of micro-cracks is small and distributed over the entire volume. Crack
growth will stop if the load is maintained at this level. If the load increases past this level,
crack propagation becomes unstable, i.e. uncontrolled propagation due to the amount of strain
energy released to make the crack propagate by itself. At the maximum level of stress, micro-
cracks propagate and are concentrated in a limited area, called the fracture process zone. All
micro-cracking will occur within this area and the increased deformation will lead to merging
of the micro-cracks. This behavior can be seen in Figure 2.5 where the stress-strain curve

9
descends and the material is softening. When the micro-cracks finally are merged, a macro
crack is created and visible. Macro-cracks are defined as traction free and visible; this step is
the final stage in which the specimen is separated. (Malm, 2016a)
Figure 2.5: Formation of micro-cracks for a specimen under uniaxial tensile loading and the
formation of the macro-crack within the fracture process zone, reconstructed from Hassanzadeh and
Westberg (2016).
To obtain a suitable descending curve due to uniaxial tensile loading, the material behavior
has to be divided into two separate curves. This is due to the displacements formed by the
elastic strain in un-cracked concrete and displacements due to the crack opening which can be
seen in Figure 2.6. The total displacement can be written as ∆𝐿 = 휀𝐿 + 𝑤, where 𝐿 is the
length of the specimen, 𝑤 is the crack opening displacement and 휀 is the elastic strain. (Malm,
2016a)
Figure 2.6: Two separate curves describing the linear and nonlinear behavior at uniaxial tensile
loading, from Mier (1984).

10
2.3.2 Fracture mechanics
Fracture mechanics describes the non-linear behavior of crack opening in concrete. The non-
linear behavior can be described as three different failure modes, see Figure 2.7. Mode I is a
normal-opening mode in which concrete is subjected to tension. Mode II is caused by shear
and mode III by tear. In concrete, mode I is the common type of failure which occurs in its
pure form. The different failure modes can occur independently or in a combination of them.
Mode 2 can be initiated as mode I, i.e. as a crack subjected to tensile stress. (Malm, 2016a)
Figure 2.7: Different types of failure modes, from Malm (2016b).
Figure 2.8 illustrates the stress distribution along the fracture zone according to fracture mode
1. The crack is propagated by a macro-crack with an initial length 𝑎0. Micro-cracks are
successively formed along the fracture process zone 𝑙𝑝. The width of the crack opening is
denoted as 𝑤 and 𝑤𝑐 is the width of the macro-crack. The stress at the transition zone between
macro crack and fracture zone process is equal to zero. The stress increases in the fracture
zone process reaching the maximum value equal to the tensile strength at the crack-tip.
(Malm, 2016b)
Figure 2.8: Illustration of stress distribution at crack tip according to fracture mode 1, reproduction
from Hillerborg et al. (1976).
In order to determine the uniaxial tensile behavior of concrete, the fracture energy and shape
of the unloading curve must be established. This information is not available in the Eurocode
and must be determined using other sources such as the Model code (2010). These codes are
based on experimental results and the expression used to estimate the fracture energy 𝐺𝑓 in
mode I is given as:

11
𝐺𝑓 = 73 ∙ 𝑓𝑐𝑚 0.18 (2.4)
where,
𝐺𝑓 is the fracture energy [Nm
m2]
𝑓𝑐𝑚 is the mean compressive strength of concrete [MPa]
The fracture energy is defined as the amount of energy needed in order to obtain a stress free
tensile crack of unit area, in which it can be illustrated in Figure 2.9. The area under the
tensile behavior curve is denoted as 𝐺𝑓, and varies along the fracture process zone to the crack
tip. (Malm, 2016a)
Figure 2.9: Crack opening curves used for numerical analyses. Left to right, linear, bilinear and
exponential, from Malm (2016b).
The linear and bilinear curves can be calculated according to the equations shown in Figure
2.9. The equation for calculating the exponential curve was proposed by Cornelissen et al.
(1986):
𝜎
𝑓𝑡= 𝑓(𝑤) −
𝑤
𝑤𝑐𝑓(𝑤𝑐) (2.5)
in which:
𝑓(𝑤) = [1 + (
𝑐1𝑤
𝑤𝑐)
3
] exp (−𝑐2𝑤
𝑤𝑐) (2.6)
where,
𝑤 is the crack opening displacement [m]
𝑤𝑐 is the crack opening displacement at which stress no longer can be transferred
[m]
𝑐1 is a material constant which 𝑐1 = 3 for normal density concrete
𝑐2 is a material constant which 𝑐2 = 6.93 for normal density concrete
𝑓𝑡 is the tensile strength [Pa]

12
2.3.3 Linear elastic fracture mechanics (LEFM)
The non-linear fracture mechanics was introduced as a result of the fracture process zone
ahead of the crack. Failure of concrete can however be estimated using only linear elastic
fracture mechanics. Linear Elastic Fracture Mechanics (LEFM) assumes that the material is
isotropic and linear elastic. In this theory, cracks are characterized by stress intensity approach
and the energy balance approach for fracture. (Benarbia and Benguediab, 2015)
The stress intensity approach
In linear elastic fracture mechanics, a stress is applied perpendicular to the crack tip with
linear elastic properties. An illustration of the stress at the tip can be seen in Figure 2.10. The
stress concentration at the tip can be expressed approximately as:
𝜎𝑦 =
𝐾
√2 ∙ 𝜋 ∙ 𝑥 (2.7)
where,
𝜎𝑦 is the stress in the y-direction [Pa]
𝐾 is the stress intensity factor [Pa√m]
𝑥 is the distance from the crack tip [m]
Figure 2.10: Stress distribution at the crack tip based on LEFM, from Hillerborg (1988).
The stress intensity factors, 𝐾 depends on the specimen geometry, loading conditions and
crack length. The mode I stress intensity factor, 𝐾𝐼, gives an overall intensity of the stress
distribution. Stress intensity factor for mode I for some common geometries are given in
Table 2.2 and illustrated in Figure 2.11.

13
Table 2.2: Mode I stress intensity factors for some common geometries, from Fett (1998).
Type of Crack Stress intensity factor
Semi-infinite plate with centered crack
of length 𝟐𝒂 𝐾𝐼 = 𝜎√𝜋 ∙ 𝑎
Finite width plate with centered crack
of length 𝟐𝒂 and width 𝑾 𝐾𝐼 = 𝜎√𝜋𝑎 [sec (𝜋𝑎
2𝑊)
12
] [1 − 0.025 (𝑎
𝑊)
2
+ 0.06(𝑎
𝑊)4]
Semi-infinite plate with edge crack of
length 𝒂 𝐾𝐼 = 1.12𝜎√𝜋𝑎
Infinite body with a central penny-
shaped crack of radius 𝒂 𝐾𝐼 = 2𝜎√𝑎
𝜋
Figure 2.11: Common geometries for determination of mode I stress intensity factors; a) Semi-infinite
plate with centered crack b) Finite width plate with centered crack c) Semi-infinite plate with edge
crack d) Infinite body with a central penny shaped crack.
The conventional expression of the stress distribution within the distance 𝑥1, in Figure 2.10, is
not valid when the stresses exceed the tensile strength. When the stress approaches infinity, it
is hard to draw conclusions of the crack stability and the propagating behavior in relation to
the strength of the material. Therefore another criterion must be taken in to account which
describes the crack propagation in terms of stress intensity factor. The crack starts to
propagate as soon as the stress intensity factor 𝐾 reaches the critical stress intensity 𝐾𝐶; this
value is a measure of the material toughness. (Hillerborg, 1988) The failure stress 𝜎𝑓 is thus
given by:
𝜎𝑓 =
𝐾𝐼𝐶
𝛼√𝜋𝑎 (2.8)
where,

14
𝐾𝐼𝑐 is the critical stress intensity factor for mode 1 [Pa√m]
𝛼 is a geometrical parameter
The energy-balance approach
An alternative method to study the stress state near the crack tip is by the energy-balance
approach. According to the first laws of thermodynamics, if a system undergoes changes from
a non-equilibrium state to a state of equilibrium, the conclusion is that there will be a net
decrease in energy. Based on this law, Griffith applied this into the formation of a crack in
1920 which became known as the Griffith energy criterion. The criterion can easily be
described as an existing crack undergoing traction forces on the crack surface. At this point,
the strain and potential energy remains constant, but this new state is not in an equilibrium
state. The potential energy must instead reduce in order to achieve equilibrium. Griffith’s
conclusion refers to the formation of a crack in which the process causes the total energy to
decrease or remain constant. (Roylance, 2001) The mathematical expression can be
formulated as:
𝑑𝑈
𝑑𝐴=
𝑑𝛱
𝑑𝐴+
𝑑𝑊
𝑑𝐴= 0 (2.9)
where,
𝑑𝐴 is the incremental crack area
𝑈 is the total energy
𝛱 is the potential energy supplied by release in internal strain energy
𝑊 is the work required to create new crack surfaces
Figure 2.12 illustrates half of an infinite plate subjected to tensile stress. The triangular
regions with the width 𝑎 and height 𝛽𝑎 is unloaded, while the remaining regions are subjected
to the applied stress 𝜎.
Figure 2.12: Infinite plate subjected to tensile stress, from Roylance (2001).
The parameter 𝛽 in this case is selected as 𝛽 = 𝜋 with agreement with the Inglis’ solution.
Inglis’ work dealt with calculations of stress concentrations around elliptical holes. However,
his work introduced a mathematical difficulty: when a perfectly sharp crack is subjected to

15
tensile stresses, the stress reaches an infinite value at the crack tip. Instead of focusing on the
crack tip stresses, Griffith developed an energy-balance approach for plain stress. (Roylance,
2001) The total strain energy 𝑈 is expressed as:
𝑈 = −
𝜎2
2𝐸∙ 𝜋𝑎2 (2.10)
where,
𝐸 is the young modulus [Pa]
𝑎 is the crack length [m]
The energy at the surface 𝑆 in relation to the crack length 𝑎 is:
𝑆 = 2𝛾𝑎 (2.11)
where,
𝛾 is the surface energy [J/m²] and the factor 2 in the equation above refers to the
partition of the plate.
The terms mentioned by the expressions above can be written as:
𝑆 + 𝑈 = 2𝛾𝑎 −𝜎2
2𝐸∙ 𝜋𝑎2 (2.12)
where the first expression on the right hand side represents the decrease in potential energy
and the second term represents the increase in surface energy which is illustrated in Figure
2.13.
Figure 2.13: Fracture Energy balance, from Roylance (2001).
An increase of the stress level will give rise to growth of the crack 𝑎, and eventually reach a
critical crack length 𝑎𝑐. It can be shown from Figure 2.13 that the quadratic dependence of the
strain energy will dominate in comparison to the surface energy passed the critical crack
length. Beyond this critical length, crack growth is unstable.

16
It can be shown that the first derivation of the total energy in relation to the critical crack is
satisfied by the expression:
𝜕(𝑆 + 𝑈)
𝜕𝑎= 2𝛾 −
𝜎𝑓2
𝐸𝜋𝑎 = 0 (2.13)
This expression can be rewritten as:
𝜎𝑓 = √2𝐸𝛾
𝜋𝑎 (2.14)
which deals with brittle materials, since Griffith’s original work was based on specifically
glass rods. The expression was however not accurate when dealing with ductility. This
expression was therefore further developed with respect to energy dissipation due to plastic
flow near the crack tip. It states that a significant fracture occurs when the strain energy is
released at a sufficient rate, denoted as critical strain release rate 𝐺𝑐 and introduced as:
𝜎𝑓 = √𝐸𝐺𝑐
𝜋𝑎
(2.15)
By comparing equation 2.8 and 2.15 with 𝑎 = 1, it can be seen that the energy and the stress
intensity are interrelated:
𝜎𝑓 = √𝐸𝐺𝑐
𝜋𝑎=
𝐾𝐼𝑐
√𝜋𝑎→ 𝐾𝐼𝑐
2 = 𝐸𝐺𝑐 (2.16)
This interrelation is applicable for plane stress. For plain strain, the expression is given as:
(Roylance, 2001)
𝐾𝐼𝑐2 = 𝐸𝐺𝑐(1 − 𝑣2) (2.17)
2.4 Fluid in cracks
Fluid driven crack propagation is a process where an existing crack is extended due to fluid
pressure. Concrete structures such as gravity dams interact constantly with high water
pressure. Existing cracks fills with a large amount of water which penetrates deeper into the
dam and consequently reducing the bearing capacity and safety of the dam. (Sha and Zhang,
2017)
There are several earlier studies of fluid driven crack propagation in concrete structures.
Brühwiler and Saouma studied water pressure distributions’ in cracks. They have shown that
the hydrostatic pressure inside a crack is a function of crack opening displacement given the
stress continuity in the fracture process zone. This internal uplift pressure reduces from full
hydrostatic pressure to zero along the fracture process zone. Slowik and Saouma (2000)

17
examined the hydrostatic pressure distribution inside a crack with respect to time and the
crack opening rate. They found that the crack opening rate plays an important role in
controlling the internal water pressure distribution. Slow crack opening rate allow for the
water to develop and propagate within the crack. The water behaves differently under fast
crack opening rates and takes a longer time to develop. Barpi and Valente (2007)
simulated water penetration inside a dam-foundation joint and analyzed the effect of crack
propagation, resulting in the crest displacement being a monotonic function of the external
load. It was also concluded that the crack initiation does not depend on dilatancy due to the
fictitious process zone that moves from the upstream to the downstream side and creates a
transition in the crack formation path. The load carrying capacity, however, depends on
dilatance according to Barpi and Valente (2007).
2.4.1 Fluid flow in cracks
Crack propagation can occur due to static or dynamic loads. Static crack propagation occurs
when the loading rate is low, i.e. no fluid flow. Higher loading rates correspond to dynamic
propagation, i.e. the fluid actually flows in the crack. The flow can behave laminar or
turbulent and depends comprehensively on the crack geometry. The fluid flow in the crack
gives rise to a successively dropping pressure along the distance from the crack opening.
Besides the type of flow, the pressure drop depends also on the fluid properties. The pressure
drop is largest for high viscous fluids due to large frictional losses along the crack boundaries.
(Rossmanith, 1992)
Longitudinal fluid flow, see Figure 2.14, in a crack can be determined with basic equations of
fluid flow:
Reynold’s lubrication theory defined by the continuity equation:
�̇� +
𝜕𝑞𝑓
𝜕𝑠+ 𝑣𝑇 + 𝑣𝐵 = 0 (2.18)
Momentum equation for incompressible flow and Newtonian fluids through narrow
parallel plates (Zielonka et al, 2014):
𝑞𝑓 =
𝑔3
12 ∙ 𝜇𝑓∙
𝜕𝑝𝑓
𝜕𝑠 (2.19)
where,
𝑔 is the fracture gap
𝑞𝑓 = 𝑣𝑓 ∙ 𝑔 is the fracturing fluid flow
𝑣𝑇 and 𝑣𝐵 are the normal flow velocities of the fluid leaking into the surrounding porous
medium
𝜇 is the fluid viscosity
𝑝𝑓 is the fluid pressure along the fracture coordinate s

18
Figure 2.14: Longitudinal fluid flow in a fracture, figure reproduced from Xielonka et al. (2014).
2.4.2 Fluid pressure in cracks
The hydrostatic pressure acting on concrete dams 𝜌𝑔ℎ, varies with depth ℎ on the upstream
face. In a horizontal crack, the loads that drive the crack propagation are only the vertical
tensile/compressive stress 𝜎𝑦 and the water pressure 𝑃𝑤 inside the crack; see Figure 2.15.
(Wang & Jia, 2016)
Figure 2.15: Stress condition around the crack in a gravity dam, from Wang & Jia (2016).
Load distributions in concrete dam cracks can be determined with two boreholes and a
fracture linking them, see Figure 2.16. Figure 2.16a illustrates a concrete dam with a crack
that has propagated far enough to reach the air on the downstream side. The fluid pressure
will distribute linearly in such case. The pressure distribution will be even if the crack is
completely sealed and can be expressed as, 𝑃 = 𝜌𝑔ℎ1. However, this behavior is not realistic
since concrete is a porous material and the water will thus spread out at the crack tip, see
Figure 2.16c. The pressure at the crack tip can in such case be expressed as: 𝑃 = 𝜌𝑔ℎ2.
(Bergh, 2017)

19
Figure 2.16: Fluid pressure distributions in a) crack in contact with air b) completely sealed crack c)
realistic closed crack, from Bergh (2017).
Figure 2.16 illustrated fluid pressure distributions in fractures for steady state conditions.
Results from a study by (Shen et.al, 2014) shows that the pressure distribution varies with
time, see Figure 2.17. The figure shows a dynamic process of fluid flow from the injection
hole (green circle) to the extraction hole (white circle). Each color represents a fluid
distribution at a specific time, where the distribution is nonlinear until the final stage. The
black colored distribution illustrates the final fluid distribution, i.e. in steady state condition.
(Shen et.al, 2014)

20
Figure 2.17: Fluid pressure distribution in a single fracture with time, figure from Shen et.al
(2014).
2.5 Effects from cracking
The effects of cracks in concrete dams may be significant and could eventually reduce the
bearing capacity of the structure or influence its durability. In this section, some of the pre-
dominate effects from cracking in concrete dam structures are described.
Cracking may cause deflection and deformation of the dam, i.e. movements and shape
changes of the structure. It can also cause offset, i.e. one side of the cracked dam moves with
respect to the other side of the dam, see Figure 2.18. It can occur at the edge of a crack or
inside a crack and consequently cause horizontal or vertical movements. The Offset can also
occur perpendicular to a crack and cause a movement upwards and outwards/inwards with
respect to the bottom part of the cracked dam.
Figure 2.18: Offset due to cracking, from Tarbox and Charlwood (2014).
Delamination caused by cracks means splitting or separation of the top layer of the concrete
and a plane parallel to the surface, see Figure 2.19. The cement used to bond the aggregate in

21
concrete gets separated or delaminated. This phenomenon is typically caused by freeze/thaw
damage or corrosion of the steel reinforcement.
Figure 2.19: Delamination of concrete, from Tarbox and Charlwood (2014).
Another predominate effect of cracking is efflorescence which appears as a white substance
on the surface of the dam; this phenomenon is caused by a chemical reaction within the
concrete and is transported to the surface by moisture transport, see Figure 2.20.
Figure 2.20: Efflorescence stains at the concrete surface due to cracking, from Tarbox and Charlwood
(2014).
Water leakage through concrete cracks is a major problem for underground structures, such as
dams. Leakage is a process of discharge of any material (liquid or gas) trough a crack, see
Figure 2.21. (Tarbox and Charlwood, 2014)
Figure 2.21: Leakage stains from flowing water on the concrete surface, from Tarbox and Charlwood
(2014).

22

23
3 Finite element method
The finite element method (FEM) is a sophisticated numerical method used in many
engineering fields to obtain approximate solutions to continuum problems. The FEM was first
applied to stress analysis and has later become applicable in many other fields. FEM can be
described as the piecewise polynomial interpolation at the nodes of an element, in other words
the field quantity such as displacements are interpolated at the nodes within an element
connected to adjacent elements and so on. The main advantage of FEM is its versatility
compared to classical methods. An example of its versatility is in terms of no restrictions
regarding the geometry, boundary conditions and loading conditions which give the ability to
combine components of different mechanical behavior. (Cook, 1995)
In this chapter, the FE- models for cracks in concrete are introduced. There are several
different material models which describe the structural behavior of concrete. However, the
material models that will be presented in this report are those provided in ABAQUS.
3.1 Material models
The nonlinear behavior of concrete has a significant influence on the structure. This section
presents a brief description of common types of material models that describe the nonlinear
behavior of concrete.
Crack propagation in concrete can be described by two main approaches, discrete crack
approach and smeared crack approach. In a smeared crack approach, the cracks are distributed
over the elements while in a discrete crack approach; there is a physical separation of two
crack surfaces. (Malm, 2016b)
3.1.1 Discrete crack approach
The discrete crack approach is initiated by defining a crack opening at the intersection of two
elements. This will introduce an early separation at the element edges and give rise to the
geometry of an existing crack, see Figure 3.1. The numerical model introduced by Ngo and
Ingraffea (1967) defines the crack propagation caused by the nodal force which is transferred
from the crack tip into the adjacent node and creates a propagating pattern. In this crack
approach, the separating parts are given linear properties of concrete, while the interface is
defined with nonlinear properties. Hence, the propagation will only occur at the interface.
(Malm, 2016b)

24
Figure 3.1: Discrete crack model, from Malm (2016b).
The discrete cracks method is however limited since it is only applicable at the interface
between concrete elements which means that the crack locations needs to be predefined
before selecting a failure surface. This causes bias when selecting the appropriate mesh to the
model. Adaptive methods can be used to reduce bias by refining the mesh into finer element
sizes. Another method used to reduce the bias effects is the extended FEM (XFEM)
developed by Belytschko and Black (1999). This method initiates a crack within the element
where the enriched nodes are located and splits them into two separate elements given the
condition that the tensile strength is reached. (Malm, 2016b)
3.1.2 Smeared crack approach
In this approach, cracks are formed in the integration points within the element, the effects are
later transferred to the whole element, see Figure 3.2. The strain in this approach will consist
of both elastic and non-linear strain. The elastic strain is formed from the uncracked concrete
material and the non-linear from the crack opening. The total strain can be expressed as:
휀𝑡𝑜𝑡 = 휀𝑒𝑙𝑎𝑠𝑡𝑖𝑐 + 휀𝑐𝑟𝑎𝑐𝑘 (3.1)
The crack opening strain can be defined as the relationship between the crack opening
displacement and the crack band length:
휀𝑐𝑟𝑎𝑐𝑘 =𝑤
ℎ (3.2)
Figure 3.2: Smeared crack model, from Malm (2016b).

25
Within the smeared crack method, there are two different approaches which describe the
crack propagation, the fixed crack model and the rotated crack model. (Malm, 2016b) The
main difference between the two approaches is illustrated in Figure 3.3.
Figure 3.3: Fixed and rotated the crack model, from Malm (2016b).
3.2 Crack modelling
Different techniques can be used to study delamination behavior of layered composites, such
as virtual crack close technique (VCCT) and cohesive elements. VCCT is based on fracture
mechanics where delamination grows when the energy release rate exceeds a critical value.
The cohesive element is a technique based on damage mechanics where the delamination
interface is modeled by a damageable material. Delamination grows when the damage
variable reaches its maximum value. (Burlayenko et al, 2008) Delamination can also be
modeled by using a surface-based cohesive interaction that is similar to cohesive elements. A
brief description of the different techniques is presented below.
3.2.1 Debond using VCCT
VCCT (Virtual crack close technique) is a technique based on linear elastic mechanics to
model delamination growth. The delamination is considered as a crack in the debonding of
two layers where its growth is based on the fracture toughness of the bond and the strain
energy release rate at the crack tip. The VCCT approach is based on two assumptions:
Irwin’s assumptions; the released energy in crack growth is equal to the work needed
to close the crack to its initial length.
The crack growth has a constant state at the crack tip.
The energy to close and open the crack, assumed that the crack closure behaves linear elastic,
can be calculated from the following equations:
−
1
2
𝐹𝑗∆𝑈𝑖
∆𝐴= 𝐺𝐼 (3.3)
∆𝐴 = 𝛿𝑎𝑏 (3.4)
where,
a
j
x
y
m
em
e 1
2
s
s
tt
x, y = global coordinate system
m , m = material coordinate system1 2
e , e = principal strain direction1 2
1
2
c1
c2
a
x
y
, me
, me
1
2
x, y = global coordinate system
m , m = material coordinate system1 2
e , e = principal strain direction1 2
1
2
s s c1c2Fixed crack approach Rotated crack approach

26
𝐹𝑗 is the node reaction force j [N]
∆𝑈𝑖 is the displacement between released nodes at I [m]
𝛿𝑎 is the crack extension [m]
𝑏 is the width of the crack [m]
𝐺𝐼 is the energy release rate [J/m²]
Cracks start to grow when the energy release rate exceeds a critical value: GI ≥ GIC where GIC
is the Mode I fracture toughness parameter. (Burlayenko et al, 2008)
3.2.2 Cohesive behavior
The adhesive interaction can be simulated in two ways: using cohesive elements or surface-
based cohesive behavior. The surface-based cohesive behavior is similar to the behavior of
cohesive elements and is defined using a traction-separation law. Surface-based behavior is
easier to use since no additional elements are needed and can be used in a wider range of
interaction. (Dassault Systèmes, 2014)
Cohesive Elements
Cohesive elements can be useful when difficulties of the implementation of VCCT into finite
element codes occur. This technique includes both initiation and propagation of delamination.
The damage occurs when the stresses exceed a strength criterion, and final separation of the
material is modeled by using fracture mechanics parameters. (Burlayenko et al, 2008)
Cohesive elements are used to model the behavior of adhesives joints, fracture at bonded
interfaces, gaskets and rock fracture. The constitutive behavior of the cohesive elements
depends on the specific application and can be defined with a:
Continuum-based constitutive model – Suitable when modelling the actual thickness
of the interface.
Traction-separation constitutive model – Suitable when the thickness of the interface
can for practical purposes be considered zero, e.g. cracks in concrete.
Uniaxial stress-based constitutive model – Useful in modelling gaskets and/or
unconstrained adhesive patches – Suitable when using only macroscopic material
properties such as stiffness and strength using conventional material models.
Cohesive elements can be constrained to surrounding components in different ways. It can
either be constrained on both its surfaces or free at one, see Figure 3.4-3.6. (Dassault
Systèmes, 2014)

27
Figure 3.4: Cohesive elements a) sharing nodes with surrounding elements, from Dassault Systèmes
(2014).
Figure 3.5: Cohesive elements connected to surrounding components with surface-based tie
constraints, from Dassault Systèmes (2014).
Figure 3.6: Cohesive elements connected with contact interaction on one side and tie constraints on
the other, from Dassault Systèmes (2014).
Damage of the traction-separation constitutive model is defined with a framework that is used
for conventional materials. A combination of multiple damage mechanisms acting on the

28
same material at the same time is allowable in this framework. The damage mechanisms
consist each of a:
damage initiation criterion
damage evolution law
choice of element deletion when it reaches a fully damaged state
The initial traction-separation response of the cohesive element is assumed to be linear, see
Figure 3.7. Material damage will occur when the damage initiation criterion is specified with
a corresponding damage evolution law. Damage on the cohesive layer will not occur under
pure compression. (Dassault Systèmes, 2014)
Figure 3.7: Traction-separation response, from Dassault Systèmes (2014).
Surface-based cohesive behavior
Surface-based cohesive behavior is mainly used when the interface thickness of the adhesive
material is negligibly small. Cohesive elements are suitable for interfaces with finite thickness
if properties such as stiffness and strength of the material are available.
The cohesive surface behavior defines an interaction between two surfaces with given
cohesive property. In order to prevent over-constraints, a pure master-slave formulation is
enforced for these surfaces. This master-slave formulation is further described in Section 3.4.
Damage modeling for cohesive surfaces with traction-separation is defined within the same
general framework as for the cohesive elements. The difference in interpretation for traction
and separation for cohesive elements and the cohesive surface can be seen in Table 3.1.
However, it’s important to note that damage in cohesive surface behavior is an interaction
property, not a material property. (Dassault Systémes, 2014).

29
Table 3.1: Traction and separation for cohesive elements and cohesive surfaces, from Dassault
Systèmes (2014).
Cohesive elements Cohesive surfaces
Separation 𝑁𝑜𝑚𝑖𝑛𝑎𝑙 𝑠𝑡𝑟𝑎𝑖𝑛 (휀) =
𝑅𝑒𝑙𝑎𝑡𝑖𝑣𝑒 𝑑𝑖𝑠𝑝𝑙𝑎𝑐𝑒𝑚𝑒𝑛𝑡 (𝛿) 𝑏𝑒𝑡𝑤𝑒𝑒𝑛 𝑡ℎ𝑒 𝑡𝑜𝑝
𝑎𝑛𝑑 𝑏𝑜𝑡𝑡𝑜𝑚 𝑜𝑓 𝑡ℎ𝑒 𝑐𝑜ℎ𝑒𝑠𝑖𝑣𝑒 𝑙𝑎𝑦𝑒𝑟
𝐼𝑛𝑖𝑡𝑖𝑎𝑙 𝑡ℎ𝑖𝑐𝑘𝑛𝑒𝑠𝑠 (𝑇0)
𝐶𝑜𝑛𝑡𝑎𝑐𝑡 𝑠𝑒𝑝𝑎𝑟𝑎𝑡𝑖𝑜𝑛 (𝛿)
Traction
𝑁𝑜𝑚𝑖𝑛𝑎𝑙 𝑠𝑡𝑟𝑒𝑠𝑠 (𝜎) 𝐶𝑜𝑛𝑡𝑎𝑐𝑡 𝑠𝑡𝑟𝑒𝑠𝑠 (𝑡) =
𝐶𝑜𝑛𝑡𝑎𝑐𝑡 𝑓𝑜𝑟𝑐𝑒 (𝐹)
𝐶𝑢𝑟𝑟𝑒𝑛𝑡 𝑎𝑟𝑒𝑎(𝐴) 𝑎𝑡𝑒𝑎𝑐ℎ 𝑐𝑜𝑛𝑡𝑎𝑐𝑡 𝑝𝑜𝑖𝑛𝑡
3.3 Pre-defined crack modelling
Another method for modelling crack propagation is the contour integral evaluation. This
method is an iterative process based on pre-defined cracks in which important factors, such as
the J-integral, in which the stress intensity factor is extracted from.
3.3.1 Contour integral evaluation
The contour integral can be evaluated using two different approaches. The first approach is
based on conventional FEM, which requires the user to adapt the mesh to the crack geometry
in order to obtain accurate results. Mesh adaptation involves specifying the crack front and the
direction in which the crack will extend. The second approach is based on the extended finite
element method (XFEM) and does not require mesh matching into the crack geometry. The
crack front and virtual crack extension are determined automatically by defining an
enrichment zone. Figure 3.8 illustrates the virtual crack extension for evaluation of the
contour integral.

30
Figure 3.8: Virtual crack extension, from Dassault Systèmes (2014).
The basic principle of the contour integral in two dimensional cases can be thought of as a
virtual motion of a block of material around the crack tip, for three dimensional cases the
virtual motion occurs on the surrounding of each node along the crack line. Blocks are
defined as contours in which each contour is a ring of elements surrounding the crack tip or
nodes along the crack line from a crack face to another in the opposite direction. ABAQUS
provides the evaluation for the type of contour integral to be calculated, these include the
evaluation of the J-integral, Ct-integral, stress intensity factors and T-stresses. The J-integral
describes the energy release rate associated with crack propagation. The Ct-integral
characterizes the rate of growth of the crack-tip creep zone, which is time dependent. For
small-scale creep, i.e. the elastic strains dominate in the material, crack growth is governed by
the stress intensity factor in failure mode I. T-stresses represent the stresses parallel to the
crack faces and is associated with the crack stability. (Dassault Systèmes, 2014)
In order to avoid convergence problems around the crack tip, cracks can be modeled with a
desired singularity. Singularity arises if the geometry of the crack region is sharp and the
strain fields become “singular” at the crack tip. This can be included in ABAQUS by editing
the crack tip with collapsed quadrilateral elements, also called the quarter point technique, see
Figure 3.9. Certain conditions must be fulfilled in order to obtain singularity; elements around
the crack tip must collapse i.e. resulting in a zero length of the edge located near the crack tip.
For the two dimensional cases, singularity is modeled as 1
√𝑟 and
1
𝑟 at the crack tip. (Dassault
Systèmes, 2014)

31
Figure 3.9: Illustration of contour mesh, from Dassault Systèmes (2014).
Domain integral method
ABAQUS uses the domain integral method to evaluate contour integrals. This method is quite
robust in terms of evaluating contour integrals accurately with no mesh refinement. This is
due to the integral taking over a domain of elements that surrounds the crack, decreasing the
effect of errors in local solution parameters. In ABAQUS, the J-integral is calculated first
from which the stress intensity factors, 𝐾 can be extracted from. (Dassault Systémes, 2014)
The J-integral
The J-integral is typically used in rate-independent quasi-static fracture analysis to evaluate
the energy release associated with the crack propagation. The energy release rate in relation to
the crack propagation for a two dimensional case is given by:
𝐽 = lim
Γ→0∫𝒏 ⋅ 𝑯 ⋅ 𝒒𝑑Γ
Γ
(3.5)
where,
Γ is the contour starting at the bottom crack surface and ending at the top surface
q is a unit vector of the direction of the crack extension
n is the outward normal to Γ
𝑯 is given by the following expression,

32
𝑯 = 𝑊𝑰 − 𝜎 ⋅
𝜕𝑢
𝜕𝑥 (3.6)
where,
𝑊 is the elastic strain energy in elastic material behavior
And for the three dimensional case the expression is written as:
𝐽 ̅ = ∫𝜆(𝑠)𝒏 ∙ 𝑯 ∙ 𝒒𝑑𝐴
𝐴
(3.7)
where,
𝜆(𝑠) is the virtual crack advancement
𝑑𝐴 is a surface element along a vanishing small tubular surface enclosing the crack
tip or crack-line
𝒏 is the normal to 𝑑𝐴 and
𝒒 is a vector direction in which crack propagates
H is related to the elastic strain energy of the material
Stress intensity factors
The stress intensity factors 𝐾𝐼 , 𝐾𝐼𝐼 , 𝐾𝐼𝐼𝐼 are of great importance in linear elastic fracture
mechanics (LEFM). These factors characterize the influence of load or deformation which is
transferred to the local crack tip in terms of stress and strain. The parameters measure also the
propensity for crack propagation or the driving forces in which propagation is initiated. For
linear elastic materials the stress intensity factor can be related to the energy release rate
according to:
𝐽 =
1
8𝜋𝑲𝑇 ⋅ 𝑩−1 ⋅ 𝑲 (3.8)
where 𝑲 = [𝐾𝐼 , 𝐾𝐼𝐼 , 𝐾𝐼𝐼𝐼]𝑇 and 𝑩 is the pre-logarithmic energy factor matrix. The above
formulation can be simplified with respect to homogeneous isotropic materials where the
matrix 𝑩 is diagonal as,
𝐽 =
1
𝐸′(𝐾𝐼
2 + 𝐾𝐼𝐼2) +
1
2𝐺𝐾𝐼𝐼𝐼
2 , (3.9)
where,
𝐺 is the shear modulus
𝐸′ is the young modulus for plane stress and 𝐸′ = 𝐸/(1 − 𝑣2) for plane strain
For cracks located at the interface of two different isotropic materials, the following
parameters are introduced as, 𝐺1 = 𝐸1 2(1 + 𝑣1)⁄ and 𝐺2 = 𝐸2 2(1 + 𝑣2)⁄ which corresponds
to the shear modulus of the interacting materials. The J-integral can be rewritten with respect
to the interacting materials as,
𝐽 =
(1 − 𝛽2)
2⋅ (
1
𝐸1′ +
1
𝐸2′ ) ⋅ (𝐾𝐼
2 + 𝐾𝐼𝐼2) +
1
4(
1
𝐺1+
1
𝐺2) ⋅ 𝐾𝐼𝐼𝐼
2 (3.10)

33
𝛽 =
𝐺1(𝜅2 − 1) − 𝐺2(𝜅1 − 1)
𝐺1(𝜅2 + 1) + 𝐺2(𝜅1 + 1) (3.11)
where,
𝜅 = 3 − 4𝑣 for plain strain
𝜅 = (3 − 𝑣)/(1 + 𝑣) for plain stress
The interfacial crack does however not behave as Mode I and Mode II in its pure form and
introduces complexity to the K parameters. (Dassault Systémes, 2014)
3.4 Interactions
In this section, a description of interactions and interaction properties that may be needed in a
typical crack modelling is presented.
Surface to surface contact
The surface to surface contact describes the contact between two deformable geometrical
parts or the contact between a deformable and a rigid geometrical part. Within the contact,
definitions can be assigned to the interaction independently i.e. a set of data may contain
different properties. An important part when choosing the right contact interaction is the
definition of the master- and slave surface. The main characteristics attached for the selection
of the master surface is that it must be applied to analytical rigid surfaces and rigid-element-
based surfaces, the slave surface, on the other hand, is attached to deformable bodies.
A surface-to-surface based interaction provides a more accurate stress and pressure results
compared to a node-to-surface interaction. A node-to-surface based interaction constrains the
slave nodes to penetrate into the master surface but this does not apply to the master surface
itself. The surface-to- surface base interaction resists penetration to occur and can be seen as a
smoothing effect. (Dassault Systèmes, 2014)
Pressure penetration
The pressure penetration interaction is used to simulate the stress distribution caused by the
fluid penetrating two surfaces. This interaction is only appropriated in surface-to-surface
based interaction. The fluid pressure is applied orthogonally to the crack plane causing the
bodies to separate from each other. In Abaqus, a fluid penetration can be used by the standard
analysis, i.e. with implicit solver. The definition is initially made by identifying the surfaces
in contact that will undergo exposure to fluid pressure. Within this interaction the magnitude
of pressure in respect to critical contact pressure must be defined, this setup is mainly defined
at the nodes of the contact surface. The fluid can penetrate into one or multiple regions of the
surface which does not consider the actual status of the contact until a critical contact pressure
is reached. The fluid penetrates easier at higher critical contact pressures. (Dassault Systèmes,
2014)

34
Nodal integration is used to determine the variation of the distributed penetration load over an
element. Load magnitudes at the element’s nodes are used to calculate the distributed load
over an element. This can be illustrated with an example of contact interaction of two bodies,
slave- and master surface respectively, as shown in Figure 3.10. The variation of the
distributed pressure penetration load over element 1 is given by:
𝑃1 = 𝑓𝑁1 + 𝑓𝑁2 = 𝑓 (3.12)
and over element 2 is given by
𝑃2 = 𝑓𝑁1 (3.13)
where,
𝑓 is the fluid pressure
𝑁1 and 𝑁2 are shape functions on the first-order element face
Figure 3.10: Pressure penetration with nonmatching meshes, from Dassault Systèmes (2014).
The distribution of the fluid pressure depends on the position of an anchor point on the
elements that is closest to the last pressure penetrated slave node. Fluid pressure is subjected
to all nodes between the “anchor point” and the first master node exposed to the fluid.
The pressure penetration gives the best accuracy when the contacting surfaces have matching
meshes, but is not necessarily required. Fluid pressure in initially nonmatching meshes can be
determined based on equilibrium conditions. Figure 3.11 illustrates the fluid load distribution
on element 5 from the previous problem in Figure 3.10 with nonmatching meshes. The anchor
point corresponding to slave node 102 is D. Element 5 on the master surface is subjected to a
part of the fluid load from element 1 and the other part from element 2. (Dassault Systèmes,
2014)
Figure 3.11: Stress distribution over an element with length 𝐿 on the master surface with nonmatching
meshes, from Dassault Systèmes (2014).

35
The variation of the distributed fluid pressure load for element 5 can be expressed as:
(Dassault Systèmes, 2014)
𝑃5 =
4𝑄202 − 2𝑄203
𝐿5𝑁1 +
4𝑄203 − 2𝑄202
𝐿5𝑁2 (3.14)
where,
𝑄202 and 𝑄203 are the equivalent forces at node 202 and 203 due to the distributed
load shown in Figure 3.11
𝑁1 and 𝑁2 are shape functions on the first-order element face
Hard contact
The “hard” contact interaction property is defined as the normal relationship between two
interacting faces. In ABAQUS, the hard contact reduces the penetration of the slave surface
into the master surface at the constrained regions and does not allow the transfer of tensile
stress across the interacting region. The contact pressure 𝑝 is formulated as a function of the
overclosure, ℎ at a certain point given as: 𝑝 = 𝑝(ℎ)
Two cases, open and closed case are described below which refers to the contact status of the
interaction:
{𝑝 = 0 ; ℎ < 0 (𝑜𝑝𝑒𝑛 𝑐𝑎𝑠𝑒)
𝑝 > 0 ; ℎ = 0 (𝑐𝑙𝑜𝑠𝑒𝑑 𝑐𝑎𝑠𝑒)
The default constraint enforce method depend on the interaction characteristics. The penalty
method is used as the default for finite sliding, surface-to-surface contact and general contact.
The augmented is set as default for three-dimensional self-contact with the node to surface
discretization. For all other cases the direct method is chosen as default. The relationship
between pressure and overclosure of the direct method is illustrated in Figure 3.12.
The contact constraint is enforced with a Lagrange multiplier representing the contact
pressure in a mixed formulation, expressed in virtual work as:
𝛿Π = 𝛿𝑝ℎ + 𝑝𝛿ℎ (3.15)
The linearized contribution, as virtual work is defined as: (Dassault Systèmes, 2014)
𝑑𝛿Π = 𝛿𝑝𝑑ℎ + 𝑑𝑝𝛿ℎ (3.16)

36
Figure 3.12: Default pressure-overclosure relationship, from Dassault Systèmes, 2014.
Soft contact
There are three different types of “softened” contact pressure-overclosure relationships” in
Abaqus:
Linear: This pressure-overclosure relationship is similar to the tabular relationship.
The linear relationship has only two data points, starting at the origin. A transmission
of contact pressure from the surfaces occurs when the overclosure (between the
surfaces in the normal direction) >0.
Tabular: A tabular pressure-overclosure relationship, see Figure 3.13, is defined by
specifying data pairs (𝑝𝑖, ℎ𝑖) of pressure 𝑝𝑖 vs overclosure ℎ𝑖. The data has to be
specified as an increasing function. A transmission of contact pressure from the
surfaces occur when the overclosure (between the surfaces in normal direction) > ℎ1.
ℎ1 is the overclosure at zero pressure.
Exponential: In this case, a transmission of contact pressure occurs when the clearance
(between the surfaces in normal direction) reduces to 𝑐0. The transmitted contact
pressure increases exponentially as the clearance decreases, see Figure 3.14.
These “softened” contact relationships might be useful when modelling thin and soft layers,
for instance crack surfaces. (Dassault Systèmes, 2014)
Figure 3.13: Softened pressure-overclosure relationship using a tabular law, from Dassault Systèmes
(2014).

37
Figure 3.14: Softened pressure-overclosure relationship using an exponential law, from Dassault
Systèmes (2014).
3.5 Loading
Analyses can be performed using different types of loading methods. A load-controlled
system means that load increases at each increment. An effect of this procedure concerns the
interpretation of the response when peak load is reached, since unloading is not allowed. This
results as a crack plateau when the rack is initiated. Another effective approach is by
replacing the prescribed load as a prescribed deformation at the corresponding nodes. The
response using the deformation-controlled loading system can be seen as a load-drop after
peak load is reached. Figure 3.15 illustrates the behavior of each loading system. (Malm,
2006)
Figure 3.15: Difference in obtained response depending on the loading method, from Malm (2006).

38

39
4 Numerical modelling
In this chapter, the FE-models used in this study are presented. Four models have been
created. Model 1a and 2a were based on the contour integral method described in Section
3.3.1. Model 1b and 2b are of non-linear properties modelled with a cohesive interaction
described in Section 3.2.2. The contour integral model was created to calculate stress intensity
factors while the cohesive interaction model was used for studying the delamination behavior.
Model 1 was adapted to simple geometries for a symmetrical reason and therefore do not
exactly represent the geometry of the experimental specimen. Model 2 was adapted to
represent the experimental specimen. The geometry, material properties, design loads and
modeling details for both cases are presented.
4.1 Geometry
The geometry of the FE-models is shown in Figure 4.1. As it can be seen in the figure, an
initial crack has been included in both cases. In Figure 4.1b, the shape of the borehole was
added with diameter 𝑑𝑏 = 10 𝑚𝑚 and length 𝑙𝑏 = 50 𝑚𝑚. The initial crack was modeled in
the vertical direction. The initial crack opening was set to 𝑤𝑐𝑟 = 0.5 𝑚𝑚 in both cases.
a) b)
Figure 4.1: a) Axisymmetric model, Model 1 b) 2D model, Model 2.

40
Figure 4.2 illustrates the FE-models used for numerical analyses. In Figure 4.2a, the crack is
embedded at the middle surface with a circular shape and triangular opening. In Figure 4.2b,
the initial crack initiates at the bottom surface of the borehole and has been shaped as a cone.
a) . b)
c) d)
Figure 4.2: a) 3D view of Model 1, b) Crack geometry of Model 1, c) 3D view of Model 2, c) Crack
geometry of Model 2.
4.2 Material properties
The material properties used in the finite element analyses can be seen in Table 4.1. Properties
for the concrete are assumed to be of quality C20/25 according to EC 2 (2004). The fracture
energy was calculated according to Model Code 2010. The fracture toughness was assumed
by recommendations from Hassanzadeh (2017).

41
Table 4.1 Material properties for the materials used in FE-model.
𝐂𝐨𝐧𝐜𝐫𝐞𝐭𝐞 𝐂𝟐𝟎/𝟐𝟓
𝐃𝐞𝐧𝐬𝐢𝐭𝐲 [𝐤𝐠/𝐦𝟑] 2700 𝐘𝐨𝐮𝐧𝐠′𝐬 𝐦𝐨𝐝𝐮𝐥𝐮𝐬 [𝐆𝐏𝐚] 30
𝐏𝐨𝐢𝐬𝐬𝐨𝐧’𝐬 𝐫𝐚𝐭𝐢𝐨 [−] 0.2
𝐓𝐞𝐧𝐬𝐢𝐥𝐞 𝐬𝐭𝐫𝐞𝐧𝐠𝐭𝐡 [𝐌𝐏𝐚] 2.2
𝐂𝐨𝐦𝐩𝐫𝐞𝐬𝐬𝐢𝐯𝐞 𝐬𝐭𝐫𝐞𝐧𝐠𝐭𝐡 [𝐌𝐏𝐚] 28
𝐅𝐫𝐚𝐜𝐭𝐮𝐫𝐞 𝐞𝐧𝐞𝐫𝐠𝐲 [𝐍𝐦/𝐦𝟐] 133
𝐅𝐫𝐚𝐜𝐭𝐮𝐫𝐞 𝐭𝐨𝐮𝐠𝐡𝐧𝐞𝐬𝐬 [𝐌𝐏𝐚√𝐦] 0.45
4.2.1 Non-linear material properties
The concrete exponential tensile softening curve seen in Figure 4.3 was made according to
Malm (2016b) as described in Section 2.3.2.
Figure 4.3: Exponential tensile softening curve.
4.3 Loads
In this report, all analyses were performed using a load-control loading system as described in
Section 3.5. The loads, as they were applied to the models are shown in Figure 4.4 and Figure
4.5. Pressure as evenly distributed load was considered in the analyses. Each magnitude along
the crack extension was determined according to Section 3.3.1.
0
0,5
1
1,5
2
2,5
0 0,05 0,1 0,15 0,2 0,25 0,3 0,35
𝜎(M
Pa)
w [mm]

42
Figure 4.4: Contour integral model, Model 1a subjected to pressure at initial crack.
Figure 4.5: Contour integral model, Model 2a subjected to pressure at borehole and initial crack.
4.4 Interface and boundary conditions
The interface of the two separated bodies was modelled by an interaction function to simulate
the surface behavior. When modelling the non-linear behavior of the concrete specimen, a
surface-to-surface interaction was made with interaction properties describing cohesive,
normal and damage behavior. A boundary condition with vertical restraint was applied to the

43
bottom surface of the models, see Figure 4.6-4.7. As the figures shows, the top part of
interaction is free to move in all directions.
Figure 4.6: Model 1 with cohesive interaction and boundary conditions.
Figure 4.7: Model 2 with cohesive interaction and boundary conditions
4.5 Meshing
This project includes four models as described in the introduction of this chapter. These
models were meshed separately. The FE-models were defined with axisymmetric solid
elements and 2D planar shell elements. The mesh of the models is shown in Appendix A.1
and the mesh attributes are shown in Table 4.2.

44
Table 4.2: Mesh attributes for the models.
Element type Number of
elements
Number of
nodes
Number
of DOFs
Model 1a CAX4R 13688 13958 41424
Model 1b
Interaction
area
Other
14000
44982
134343
CAX8R CAX4R
Model 2a CPS4R 12226 13083 39245
Model 2b
Interaction
area
Other
11200
17267
51533
CPS8 CPS8R

45
5 Experimental Test
This chapter gives a brief description of the experimental test including the test specimen,
instrumentation and procedure. The main purpose of the experiment was to develop an
experimental setup based on a pilot study to evaluate the crack propagation influenced by
water pressure in concrete cracks. The procedure includes different designs of specimens to
obtain the optimal test setup. The test was performed at the Department of Concrete
Structures at the Royal Institute of Technology (KTH).
5.1 Test specimen
The concrete mix design was obtained to meet requirements of moderate strength in order to
facilitate the formation of cracks in the concrete specimen due to hydraulic water pressure.
Grain-Size distribution of the aggregates and the proportion of the other materials in concrete
are given in Table 5.1.
Table 5.1: Concrete composition
Water (kg) Cement (kg) Water cement
ratio w/c
Aggregates (kg)
0-8 mm 8-16 mm
5.45 7.78 0.70 31.8 30.8
Three cylinder specimens were produced for the test; this to ensure that at least one specimen
is testable, see Table 5.2. For each cylinder, two cubes were produced to determine the
compressive strength of the concrete.
Table 5.2: Specimens of hydraulic fracturing
No. Age (days) Average compressive strength of concrete
(MPa)
1 7 46.2
2 7 46.2
3 7 46.2
5.2 Instrumentation
This section presents the instrumentation devices used in the experimental test. To give the
reader a good understanding, a description of each device’s specification, position and
purpose are presented.

46
Anchoring
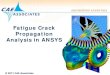
Threaded flanges can be used for the anchoring of the specimen in the vertical direction.
Figure 5.1a) illustrates the flange surface attached to concrete. Figure 5.1b) illustrates the
flange connection to the hydraulic device. The outer diameter of the flange is 115 mm and the
inner diameter is 35 mm.
a) b)
Figure 5.1: Photo of the threaded flange, a) bottom side b) top side.
An alternative method of anchoring the specimen to the hydraulic device is by connecting a
nipple adapter to the specimen. This can be connected to the specimen with adhesive glue,
e.g. plastic padding. Such nipple adapter can be seen in Figure 5.2. The nipple has different
circle dimensions on each side; outer diameter 33.8 mm and inner diameter 30.8 mm on one
side and outer diameter 24.7 mm and inner diameter 19.6 mm on the opposite side. The length
of the nipple is 34.7 mm.
Figure 5.2: Photo of the brass nipple connector adaptor.
Hydraulic loading device
To load the specimens with water, a hydraulic loading device can be used. The loading device
can be seen in Figure 5.3. This device includes a nitrogen gas tank with pressure regulators
and a water tank. The specimen can be attached to the device by the different anchoring
methods described above.

47
Figure 5.3: Photo of the hydraulic loading device.
Pressure gauge transducer
In order to measure the water pressure applied to the specimen from the hydraulic loading
device, pressure gauge transducers are needed, see Figure 5.4. This pressure gauge transducer
is connected to a Data Acquisition system (Catman DAQ software) from HBM that allows for
data visualization, analysis and storage during the measurement process. (HBM, 2017)
Figure 5.4: Photo of the pressure gauge transducer.
Strain gauge
Strain gauges are used for measuring strains. These can be installed on the concrete surface or
within the concrete, or on reinforcement bars before casting the concrete. If measuring strains
on concrete surfaces, crack propagation gauges from HBM (2017) can be used. There are
three different types of these gages: RDS20, RDS40 and RDS22, illustrated in Figure 5.5.

48
RDS20 and RDS40 consist of electrically separated resistors. This means that individual
circuits will be interrupted when the crack propagates. Type RDS22 consist of conductor
tracks and will tear as the crack extends. (HBM, 2017) Strain gages from Geokon (2017)
called VW-4202 can be used for strain measurements within the concrete, see Figure 5.6.
Figure 5.5: Illustration of crack propagation gauges with actual size in mm, figure from HBM (2017).
Figure 5.6: Strain gauge used for measuring strains in concrete embedment, figure from Geokon
(2017).
Tomography
To be able to inspect the crack propagation within the concrete specimen, a 3D computed
tomography (CT) can be used, see Figure 5.7. This tomography is a non-destructive scanning
technology that allows for inspection of an object and the interior in 3D. This 3D technique
takes hundreds or thousands of digital 2D X-rays around 360 degrees rotation of an object.
The 2D projection is then reconstructed into a 3D CT image by numerical algorithms. By
doing this, it is possible to view and slice the object at any angle in the computer. (NTI, 2017)

49
Figure 5.7: Tomography for inspection of crack propagation.
5.3 Experimental procedure
Early stage – defining a test setup
The concrete specimen was designed as a cylinder with a diameter of 100 mm and height 200
mm, see Figure 5.8. The height of the borehole was determined to be half of the specimen
height. This height would be long enough to exclude the effect of stress concentration caused
by the anchoring.
Figure 5.8: 3D illustration of the experimental specimen
The concrete was mixed according to Table 5.1 and placed into cylindrical molds. In the
center of the specimen, a circularly shaped plastic sheet representing the crack was placed, see
Figure 5.9.

50
Figure 5.9: Photo of the test-setup for creating the embedded crack.
A tube of aluminum was placed on top of the plastic sheet crack surface and the remaining
concrete was casted. The size of the tube was determined with respect to the size of the inner
diameter of the steel flange shown in Figure 5.1. To avoid leakage of water, the borehole was
made a few millimeters larger than the inner diameter of the flange. The concrete was under
hardening four hours before the removal of the plastic sheet and the tube, see Figure 5.10. The
plastic sheet was embedded in oil to limit friction during the removal. Vibration on the upper
part of the specimen was not possible due to the embedded crack and tube that would have
been moved and sealed with the cement paste. This resulted in uneven surfaces and
uncompacted concrete. The size of the aggregates prevented the bolts from remaining in
place.
Figure 5.10: Photo of the test-setup for the entire mold before removing the crack and tube.
All specimens were stored in a water tank in seven days. After its removal from the water
tank, the specimen looked like in Figure 5.11. As can be seen in the figure, the bolts placed in
the concrete were quite loose and unfixed.

51
Figure 5.11: Photo of the specimen after 7 days hardening.
To ensure that initial crack was created, the specimens were inspected in the tomography, see
Figure A.3.1 in Appendix A. The specimens were scanned in 2D, hence the limited resolution
in the photo shown in the figure.
Since the bolts were not fixed and the specimen had uneven surfaces, another solution for the
anchoring had to be tried. The solution was to saw the specimens and drill new holes, see
Figure 5.12. This solution was unfortunately unsuccessful, small cracks developed during the
drilling.
Figure 5.12: Photo of the sawed specimen being drilled.
The final solution was to saw all specimens to the height of the horizontal crack plane and
drill new boreholes followed by a new crack. Horizontal crack was hard to create after
hardening; hence a vertical crack had to be added instead. The vertical crack was created with
a drill machine with a diameter of 5 mm and a varying depth of 5-10 mm. The second
anchoring method described in Section 5.2 was used in this case. The nipple connector
adaptors were attached to the specimen with plastic padding. Figure 5.13 shows the final
specimen setup.

52
Figure 5.13: Final test setup.
Final stage – testing
In this stage, the specimens were subjected to water pressure to see if the final test setup was
accurate enough to propagate the crack. The aim of this testing was to create a fracture and
inspect the fracture in the tomography. The specimens were fixed on the testing machine and
attached to the hydraulic loading device with the nipple adaptor and a drain valve for
controlling the incoming water pressure, see Figure 5.14. It can also be seen in this figure that
the pressure gauge transducer has been installed. The setup for this testing is schematic
illustrated in Figure 5.15 and shown in Figure 5.16. A successively increasing load was
applied to the specimens, where after the valve closed to control if the load remained constant
or if leakage occurred. The pressure was kept constant for a while in order to let the water
pressure to develop.
Figure 5.14: Test setup with additional nipple connectors and a drain valve

53
Figure 5.15: Schematic illustration of the loading test setup.
Figure 5.16: Photo of the loading test setup.
This study did not include strain measurements but the obtained test setup can be used for
future testing of crack propagation. In order to measure strains in this test setup, strain gages
described in Section 5.2 can be used. The 3D computed tomography can then be used to
inspect the crack propagation.

54

55
6 Results
In this chapter, the results from the FE-analyses and experiment test are presented. For the
FE-analyses, linear and nonlinear models have been adapted to the simulations in order to
obtain relevant information to answer the research questions.
In Section 6.1, the numerical results of the stress intensity factors of Model 1a are presented
and compared to the analytical solution, along with the tensile softening curve. Furthermore,
stress analyses for determination of critical loads using Model 1a and 2a are presented.
Finally, an approximation of the water pressure distribution along the crack propagation using
Model 1b and 2b are presented.
In Section 6.2, results from the experimental test are presented.
6.1 Numerical results
6.1.1 Mode I failure
The contour integral method described in Section 3.3.1 was implemented in Model 1a. The
numerical analyses were performed iterative assuming linear elastic behavior of concrete
which can be seen in Table 4.1, Section 4.2. As a first step of the iterative procedure of the
model, simulations have been conducted for the assessment of the reliability of the stress
intensity factors. The values obtained in the simulations are compared to the analytical
solution for a plate with finite width and centered crack subjected to tensile stress described in
Table 2.2, Section 2.3.3. It can be seen from Figure 6.1 that the values from the simulations
are in well agreement with the analytical solution.
Figure 6.1: Comparison of numerical and analytical stress intensity factor values.
0
0,5
1
1,5
2
2,5
1 4 7 10 13 16 19 22 25 28 31 34 37 40
Str
ess
inte
nsi
ty f
act
or
K1
[MP
a√
m]
Distance from crack tip [mm]
FEM
Analytical

56
The first model, Model 1a, is subjected to uniaxial tensile load, failure mode I, which is
described is Section 2.3.2. The tensile softening curve was constructed according to linear
elastic fracture mechanics (LEFM) described in Section 2.3.3. The top surface is subjected to
tensile stress 𝜎 = 1.0 𝑀𝑃𝑎. The stress intensity factors were determined using the contour
integral method. Due to the effects of singularity caused by sharp cracks, the crack path
initiates at the distance 𝑎0 = 1 𝑚𝑚. This technique is done by assigning a fictitious crack
(seam) to the contour region. The tensile softening curve can be shown in Figure 6.2, as a
function of the crack mouth opening displacement (CMOD).
Figure 6.2: Tensile softening curve.
6.1.2 Internal pressure
Model 1
In this step, the same model, Model la described in previous section was used for the
determination of the critical pressure along the crack extension. Two different iterative
procedures have been conducted. The first iterative procedure was done assuming an evenly
distributed pressure load along the crack extension. The pressure acting on the crack surface
was assumed as 𝑝0 = 4 𝑀𝑃𝑎. For every crack extension, the critical stress was calculated
according to the critical stress intensity factor approach with eq. 2.7 described in Section
2.3.3. The critical stress intensity value 𝐾𝐼𝐶 in mode 1 failure is dependable of the material
composition and could not be calculated in our simulations. For this reason, the critical value
was assumed as 𝐾𝐼𝐶 = 0.225 𝑀𝑃𝑎√𝑚 for the axisymmetric model, and 𝐾𝐼𝐶 = 0.45 𝑀𝑃𝑎√𝑚 for the 2D model. It can be seen from Figure A.2.1-A.2.4, Appendix 2 that 𝐾𝐼 = 𝐾𝐼𝐶 at
different crack extensions by the designed critical loads. Some of the values calculated with
respect to the crack extension are given in Table 6.1.
0,00
0,40
0,80
1,20
1,60
2,00
2,40
0 0,06 0,12 0,18 0,24 0,3 0,36 0,42
Str
ess
[MP
a]
CMOD [mm]

57
Table 6.1: Values determined at given crack extension 𝑎 for Model 1a.
𝒂[𝒎𝒎] 𝑲𝟏[𝑴𝑷𝒂√𝒎] 𝑪𝑴𝑶𝑫[𝒎𝒎] 𝑷𝒄𝒓𝒊𝒕[𝑴𝑷𝒂]
1 0.27 0.0028 3.28
20 0.69 0.0651 1.31
39 4.21 0.1320 0.21
The critical pressure along the crack extension can be shown in Figure 6.3. It can be seen
from the figure that the pressure needed for the continuous propagation decreases, as a result
of the increased fracture area.
Figure 6.3: Critical pressure at different crack extensions.
The second iterative procedure was performed by applying the pressure only at the initial
crack surface during the whole procedure. The results can be seen in Figure 6.4 expressed as
the resultant critical force along the crack path. In Figure 6.5, the expression is projected as
critical pressure along the crack extension.
Figure 6.4: Resultant force for the two pressure conditions.
0
0,5
1
1,5
2
2,5
3
3,5
1 4 7 10 13 16 19 22 25 28 31 34 37 40
Pre
ssu
re [
MP
a]
Distance from crack tip [mm]
0
1
2
3
4
5
1 4 7 10 13 16 19 22 25 28 31 34 37 40
Fo
rce
[kN
]
Distance from crack tip [mm]
Pressure at initial
crack surface
Pressure along
crack propagation

58
Figure 6.5: Pressure distribution along crack extension.
Model 2
Model 2 was designed as an approximation to the experimental test. Same iterative procedure
has been conducted as in Model 1a but with different geometry and loading conditions as
described in Section 4.1 and 4.3. The critical pressure at different crack locations can be
shown in Figure 6.6. In Figure 6.7, the critical pressure is shown as a function of the crack
mouth opening displacement.
Figure 6.6: Pressure distribution along crack extension.
0
0,5
1
1,5
2
2,5
3
3,5
4
1 4 7 10 13 16 19 22 25 28 31 34 37 40
Pre
ssu
re [
MP
a]
Distance from crack tip [mm]
Pressure at initial
crack surface
Pressure along
crack
propagation
0,00
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
1 5 9 13 17 21 25 29 33 37 41 45
Pre
ssu
re [
MP
a]
Distance from crack tip [mm]
Pressure at
borehole and
initial crack
surface
Pressure at
borehole and
along crack
propagation

59
Figure 6.7: Critical pressure as a function of the crack mouth opening displacement (CMOD).
6.1.3 Water pressure distribution
For the analyses of water pressure distribution following the crack propagation, the critical
loads determined in the previous section were used. The model used in the analyses is of
nonlinear geometry with a surface-based cohesive interaction between two separate bodies
described in Section 3.2.2. The damage initiation is modelled with the maximal nominal stress
criterion. The normal value is set to 𝑇0 = 2.2 𝑀𝑃𝑎, which is the tensile strength of the
material, the shear values were assumed to a factor 10 of the normal value. The damage
evolution is of fracture energy type and set to 𝐺𝑓 = 133 𝑁/𝑚 according to section 2.3.2 with
exponential softening. The analyses are performed iteratively based on the critical pressure
values as evenly distributed along the crack extension. Figure 6.8-6.9 shows the summarized
pressure distribution along the crack extension. It can be seen in the figures that the pressure
is constant along the limited distance and increases slightly in order to continue the
propagation behavior.
Figure 6.8: Water pressure distribution for each crack extension for Model 1b.
0,00
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,00 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08
Pre
ssu
re [
MP
a]
CMOD [mm]
Pressure at
borehole and
initial crack
surface
Pressure at
borehole and
along crack
propagation
0
0,5
1
1,5
2
2,5
3
3,5
0 5 10 15 20 25 30 35 40
Wa
ter p
ress
ure
[M
Pa
]
Distance from crack tip [mm]

60
Figure 6.9: Water pressure distribution for each crack extension for Model 2b.
In Figure 6.8, the pressure near the initial crack tip is high compared to adjacent distance, the
difference in magnitude is around 0.5 MPa. This is due to the concentrated pressure in a very
small fracture area, which requires higher pressure in order to initiate crack propagation.
6.2 Experimental results
In specimen 1, the pressure increased to a level of 0.27 MPa before closing the valve and
letting the pressure be constant. Due to leakage, the pressure decreased until 2445 seconds.
After this time, the specimen emptied from water and the pressure decreased to zero, see
Figure 6.10.
Figure 6.10: Water pressure in function of time for Specimen 1.
In specimen 2, the water pressure increased to 0.23 MPa before closing the valve. The
pressure remained constant for almost 80 seconds before decreasing due to leakage. As can be
seen in Figure 6.11, the pressure decreased faster than in specimen 1, and reached a low
pressure level after 354 seconds.
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0 5 10 15 20 25 30 35 40 45
Pre
ssu
re [
Mp
a]
Distance from crack tip [mm]
0
0,05
0,1
0,15
0,2
0,25
0,3
0 500 1000 1500 2000 2500
Wa
ter p
ress
ure
[M
Pa
]
Time [s]

61
Figure 6.11: Water pressure in function of time for Specimen 2.
In Figure 6.12, at water pressure level 0.41 MPa, small leakage occurred and the pressure
decreased using specimen 3. The pressure was manually increased further to 0.5 MPa, and
remained constant for almost 300 seconds before decreasing. A last increment of the pressure
was to 0.72 MPa and still no fracture occurred. When closing the valve, the pressure
decreased significantly.
Figure 6.12: Water pressure in function of time for Specimen 3.
Since leakage occurred quite early in specimen 1 and 2, only specimen 3 was of interest to
inspect in the tomography. The specimen after the hydraulic testing can be seen in Figure
A.3.2 in Appendix A. It can be seen that the initial crack did not propagate but the pressure
caused some cracks at the edges of the plastic padding in the borehole and continued to
propagate a small distance in the concrete.
0
0,05
0,1
0,15
0,2
0,25
0 50 100 150 200 250 300 350 400
Wa
ter p
ress
ure
[M
Pa
]
Time [s]
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
Wa
ter p
ress
ure
[M
Pa
]
Time [s]

62

63
7 Conclusions and further research
7.1 Conclusions
In this project, finite element models have been used to simulate crack propagation due to
internal water pressure. A contour-integral model and a cohesive-interaction model for the
analysis of crack propagations and pressure distribution within concrete cracks in dams have
been presented. This project also includes an example of a test setup which allows studying
the real crack propagation behavior due to water pressure.
7.1.1 Numerical simulations
To determine the critical pressure loads that cause a crack to propagate, linear elastic material
properties were used in the simulations. This was performed with the contour integral method
where the stress intensity factors were calculated according to linear elastic fracture
mechanics. These critical pressure magnitudes were then used as input values to study the
pressure distribution along the crack propagation. This was simulated with the cohesive
surface-to-surface contact interaction based on non-linear material properties.
Two cases have been analyzed when determining the critical pressure loads; case a) pressure
acting only at the initial crack surface and case b) pressure acting along the crack propagation.
The specimens used in this study were of small dimensions and the calculations were
performed under high controlled conditions, which may differ significantly from real concrete
dams. Case a) can be approximated as the influence of dynamic forces causing sudden crack
propagation, such as earthquakes. Water pressure requires time to develop inside cracks in
order to reach steady state conditions. In this case of sudden cracks induced by dynamic
forces, water pressure may not be able to develop along the propagation. In case b), water
pressure has been fully able to develop a wet surface. This example can be shown in Figure
6.4, as the resultant force due to the two pressure cases. For a certain crack propagation
distance, the resultant force is significantly higher when the crack has not yet developed a wet
surface, whereas the resultant force is less for the crack with fully developed wet surface. The
resultant force could be approximated as the mean value of the two cases when the wet front
is unknown.
The pressure distribution varies along the crack propagation. As can be seen in Figure 6.8,
when a macro crack is formed, the pressure is developed as evenly distributed and increases
slightly in order to continue the propagation. Thereafter, the pressure decreases due to
increased fracture area and follows the same pattern along the propagation until reaching total
separation of the specimen.
It is important to note that the initial loading conditions have a significant effect on the
pressure distribution. In the case of the experimental approximation, Model 2b, Figure 6.9, it

64
requires less pressure to initiate the propagation behavior, by almost a factor 10 compared to
Model 1b. This is due to the effect of pressure acting at the borehole surface and the high
pressure concentration at the initial crack length. The conclusion of this can be explained as
the geometrical size effect of the initial crack.
7.1.2 Test setup
The process of defining the ultimate test setup included several design performances. The
final test setup consisted of a vertical crack instead of the intended horizontal crack. The setup
with the horizontal crack would have been testable if the initial crack was added in a different
way. Since no vibration was allowed after casting the top part, the specimen was in poor
condition. If the initial crack and the tube were glued together, it would have been possible to
vibrate the upper part without risking penetration of the cement paste between the initial crack
and the tube, which would otherwise prevent the removal of the crack.
Although all three specimens were defined similarly with some minor differences in
dimensions, the loading results differed for each of those. Leakage occurred fastest in
specimen 2 and slowest in specimen 3. The reason for the leakage is believed to be caused by
poor bonding between the plastic padding sealing and the nipple adaptor. A reason for this
can be human errors when applying the plastic padding and not the sealing material itself. For
the hydraulic testing, some factors prevented the fracture process of the concrete specimen.
Those factors may be related to the concrete quality which was of higher strength than
expected and also the effects of the crack geometry. Due to safety reasons, the load could not
be increased to more than 0.72 MPa. As can be seen in Appendix A.3, the resolution of the
tomography pictures are limited since the 3D x-ray scanning was under repair, which made
only possible to scan in 2D.
7.2 Further research
When cracks start to propagate, it takes a certain time for the water to develop a wet crack
surface. In this project, the time of the water penetration into the crack has been excluded,
which could be included in further research of cylindrical specimens.
The crack propagation was studied using the contour integral evaluation method with
predefined distances. In further research, other method that allows the propagation behavior
such as the extended finite element method (XFEM) could be used.
The delamination behavior at the interface due to pressure penetration was studied using the
surface-to-surface based cohesive interaction. Other methods such as, cohesive elements or
the virtual crack close technique (VCCT) could be used.
The study of the pressure distribution was performed iteratively using predefined damage
criterions within the cohesive interaction module. Instead of performing it iteratively, another
simulation method such as the pressure penetration interaction could be used.

65
It would be of interest to investigate different sizes of specimens with similar simulation
methods to examine size effects in the analyses of crack propagation driven by water pressure.
This could provide a basis for further analyses of crack propagation of different dimensions.
For the test setup, several factors need to be considered for further studies of this type of
experiments. Firstly, the initial crack should be thinner and deeper in order to propagate the
crack more easily. Another consideration is to seal the anchoring more accurate and apply
plastic padding only at the interface between borehole and nipple adaptor. Further studies
could also include calculations for these exact specimen dimensions and material properties.
Finally, it is recommended to apply a certain level of pressure to the specimen and inspect it
at different time intervals using the tomography, 3D scanning if possible in order to capture
the real propagating behavior.

66

67
Bibliography
American Concrete Institute, 2008. Guide for Conducting a Visual Inspection of Concrete in
Service, ISBN 978-0-87031-290-8.
Barpi, F. & Valente, S., 2008. Modeling water penetration at dam-foundation joint. Jorunal of
Engineering Mechanics, vol. 75, no. 3-4, pp. 629-642.
Benarbia, D., Benguediab, M., 2015. Determination of Stress Intensity Factor in Concrete
Material Under Brazilian Disc and Three-point Bending Tests Using Finite Element Method.
Research Article at department of Mechanical Engineering 59(4):199-203.
Bergh, H., 2017. Senior Lecturer in hydraulic Engineering at KTH. Personal communication.
Brühwiler, E., Saouma, V.E., 1995. Water fracture interaction in concrete. Part II: Hydrostatic
pressure in cracks. ACI Materials Journal. Vol. 92, No. 4. pp. 296-303.
Burlayenko, V.N., Sadowski,. 2008. FE modeling of delamination growth in interlaminar
fracture specimens. National Technical Universiy, Ukraine and Lublin University of
Technology, Poland.
Cook, R.D., 1995. Finite element modeling for stress analysis, University of Wisconsin,
Madison.
Cornelissen H, Hordijk D & Reinhardt H (1986): Experimental determination of crack
softening characteristics of normal weight and lightweight concrete. Heron, Vol.31, No. 2,
Delft.
Dassault Systémes, 2014. ABAQUS 6.14 Documentation.
EC 2, 2004. Eurocode 2: Design of concrete structures – Part 1-1: General rules and rules for
buildings. European Committee for Standardization.
Fett, T., 1998. Stress intensity factors and weight functions for special crack problems. Institut
für Materialforschung.
Geokon, 2017. Geokon – Instruction Manual.
Online, http://www.geokon.com/content/manuals/4200-4202-4204-4210_Strain_Gages.pdf
Geokon. 2017. Geokon – Concrete Embedment (VW). Online,
http://www.geokon.com/4200-Series
Hassanzadeh, M., Westberg, W., 2016. Inventering av spricktyper I vattenkraftens
betongkonstruktioner. Energiforskrapport 2016:257. Energiforsk AB.
Hassanzadeh, M., 2017. Adjunct Professor, PhD, Civ.Eng at Sweco. Personal communication.

68
HBM. 2017. P15 Pressure Gauge Transducer. Online, https://www.hbm.com/en/2478/p15-
pressure-gage-transducer-for-excess-pressure/
Hillerborg, A., 1988. Application of fracture mechanics to concrete: summary of a series of
lecture. Report TVBM; Vol. 3030. Lund University.
Malm, R., 2006. Shear cracks in concrete structures subjected to in-plane stresses, master
thesis, KTH Royal Institute of Technology. Online, http://www.diva-
portal.org/smash/get/diva2:11277/FULLTEXT01.pdf
Malm, R., 2016a. Non-linear analyses of concrete beams with ABAQUS. Compendium for
AF2102 Concrete Structures, advanced course. KTH Royal Institute of Technology.
Malm, R., 2016b. Guideline for FE analyses of concrete dams. Energiforskrapport 2016:270.
Micro-Measurements. 2015. Strain Gage Installations for Concrete Structures. Online,
http://www.vishaypg.com/docs/11091/tt611.pdf
National Ready Mixed Concrete Association (NRMCA), 2009. CIP 3-Crazing Concrete
Surfaces.
National Ready Mixed Concrete Association (NRMCA), 2014. CIP 5-Plastic Shrinkage
Cracking. Online, https://www.nrmca.org/aboutconcrete/cips/05pr.pdf
NORTH STAR IMAGING. (2017). NTI – X5000. Online, http://4nsi.com/systems/x5000
Rossmanith, H.P., 1992. Fracture and Damage of Concrete and Rock. Institute of Mechanics,
Technical University of Vienna. Proceedings of the Second International Conference on
Fracture and Damage of Concrete and Rock, Vienna, Austria.
Roylance, D., 2001. Introduction to fracture mechanics, Department of Material Science and
Engineering, Massachusetts Institute of Technology, Cambridge, MA.
Sha, S., Zhang, G., 2017. Modeling of hydraulic fracture of concrete gravity dams. Research
article at the Department of Hydraulic Engineering, Tsinghua University, Beijing. Vol. 2017,
Article ID 8523213, 15 pages.
Shen, B., Stephansson, O., Rinne, M., 2014. Modelling rock fracture processes. A fracture
mechanics approach using FRACOD. ISBN 978-94-007-6904-5 (eBook).
Slowik, V., Saouma, V., 2000. Water pressure in propagating concrete cracks, ASCE Journal
of Structural Division, Vol 126, No 2.
Tarbox, G.S., Charlwood, R., 2014. Investigating the structural safety of cracked concrete
dams. Report for CEATI INTERNATIONAL Inc, CEATI REPORT No. T122700-0226,
Montreal, Quebec, Canada.
Van Mier J.G.M. 1984. Strain-softening of concrete under multiaxial loading conditions, PhD
thesis, Eindhoven Univ. of Techn., Eindoven.

69
Zielonka, M., Searles, K., Ning, J., Buechlee, S., 2014. Development and validation of fully-
coupled hydraulic fracturing simulation capabilities. ExxonMobil Upstream Research
Company.
Wang, Y., Jia, J., 2016. Experimental study on the influence of hydraulic fracturing on high
concrete gravity dams. Department of Hydraulic Engineering, Tsinghua University, Beijing
China.

70

71
Appendix A
Figures
A.1 Mesh of the finite element models
Figure A.1.1: Model 1a with contour integrals.
Figure A.1.2: Zoomed view of Model 1a with contour integrals.

72
Figure A.1.3: Model 1b with cohesive interaction.
Figure A.1.4: Zoomed view of Model 1b with cohesive interaction.

73
Figure A.1.5: Model 2a with contour integrals
Figure A.1.6: Zoomed view of Model 2a with contour integrals.

74
Figure A.1.7: Model 2b with cohesive interaction.
Figure A.1.8: Zoomed view of Model 2b with cohesive interaction.

75
A.2 Stress distribution along crack propagation
Figure A.2.1: Stress distribution at distance 1 mm from crack tip.
Figure A.2.2: Stress distribution at distance 20 mm from crack tip.
Figure A.2.3: Stress distribution at distance 39 mm from crack tip.

76
Figure A.2.4: Stress distribution at distance 43 mm from crack tip.
A.3 Tomography pictures
Figure A.3.1: Horizontal initial crack inspected in tomography, marked in red.

77
a) b)
Figure A.3.2: Photo of the crack before a) and after b) testing for specimen 3 (zoomed view),
inspected in tomography.