Embed Size (px)
Citation preview
�
�
�
�
Collaborative MIMO Networks
Dr Mischa Dohler
Senior Research Expert
France Telecom R&D, TECH/IDEA
Journee GDR, ENST, Paris, March 2007 1
�
�
�
�
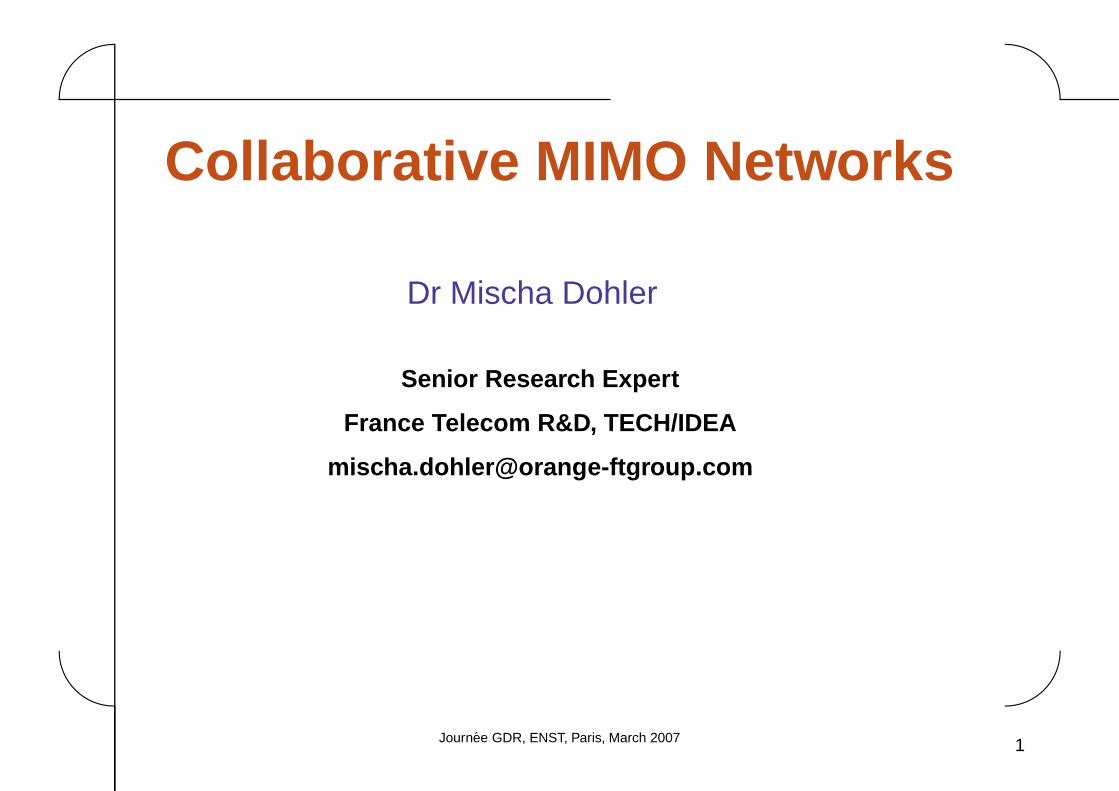
– UMTS & WiMAX Capacity & Coverage Extension –
The Opportunity Driven Multiple Access (ODMA) protocol [1] in 3GPP as well as the WiMAX
standard facilitate relaying to enhance capacity and coverage. An extension to a distributed
deployment will be shown to further boost capacity.
Figure 1: Traditional and distributed relaying in UMTS and WiMAX.
2
�
�
�
�
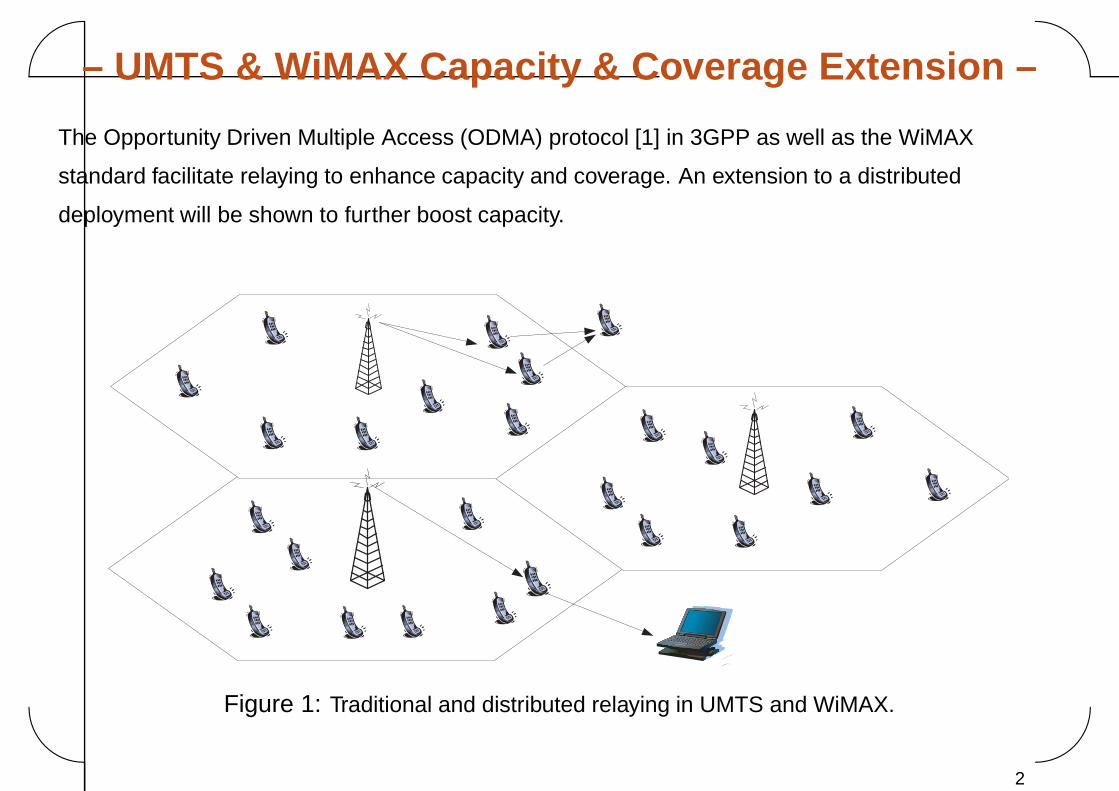
– WLAN Capacity & Coverage Extension –
Wireless Local Area Networks (WLANs) have sporadic hot-spot coverage in offices, cafes, train
stations, etc [2]. Traditional and distributed relaying increases capacity at WLAN cell edges and
closes coverage holes in sufficiently dense deployment areas (e.g. Orange’s UNIK service).
Figure 2: Coverage extension of high-capacity indoor WLAN towards outdoor users.
3
�
�
�
�
– Sensor Networks –
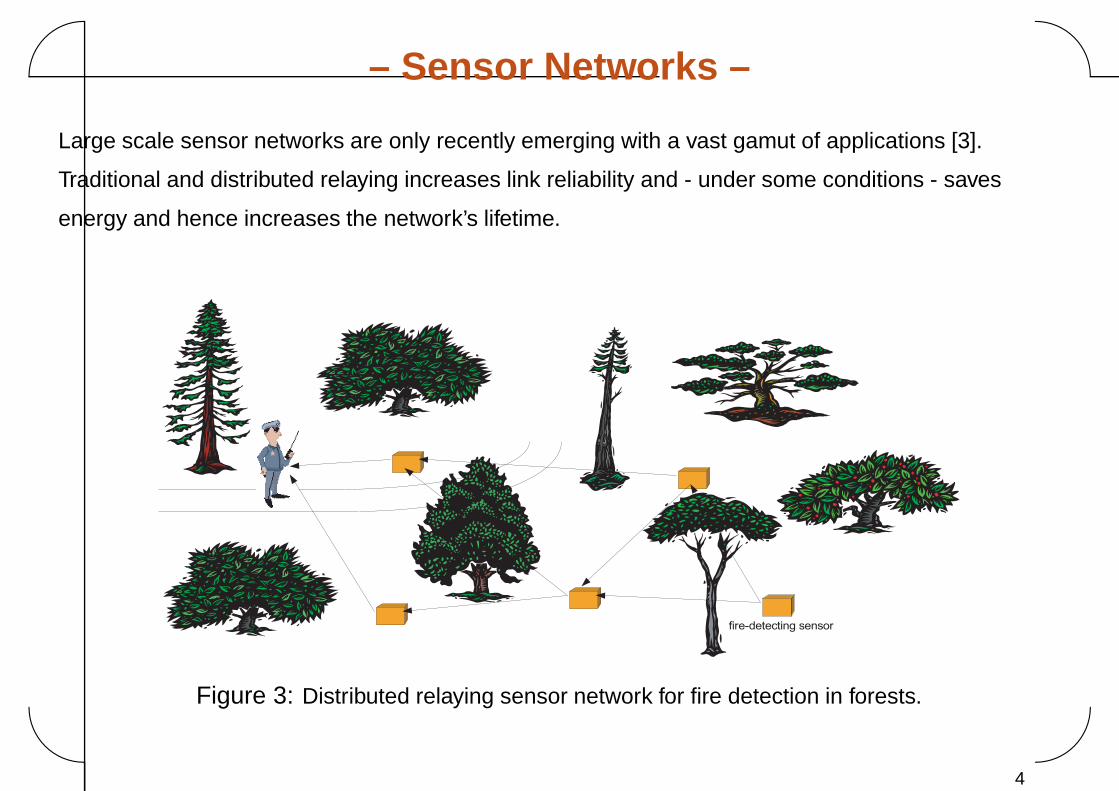
Large scale sensor networks are only recently emerging with a vast gamut of applications [3].
Traditional and distributed relaying increases link reliability and - under some conditions - saves
energy and hence increases the network’s lifetime.
fire-detecting sensor
Figure 3: Distributed relaying sensor network for fire detection in forests.
4
�
�
�
�
– Unmanned Aerial Vehicles –
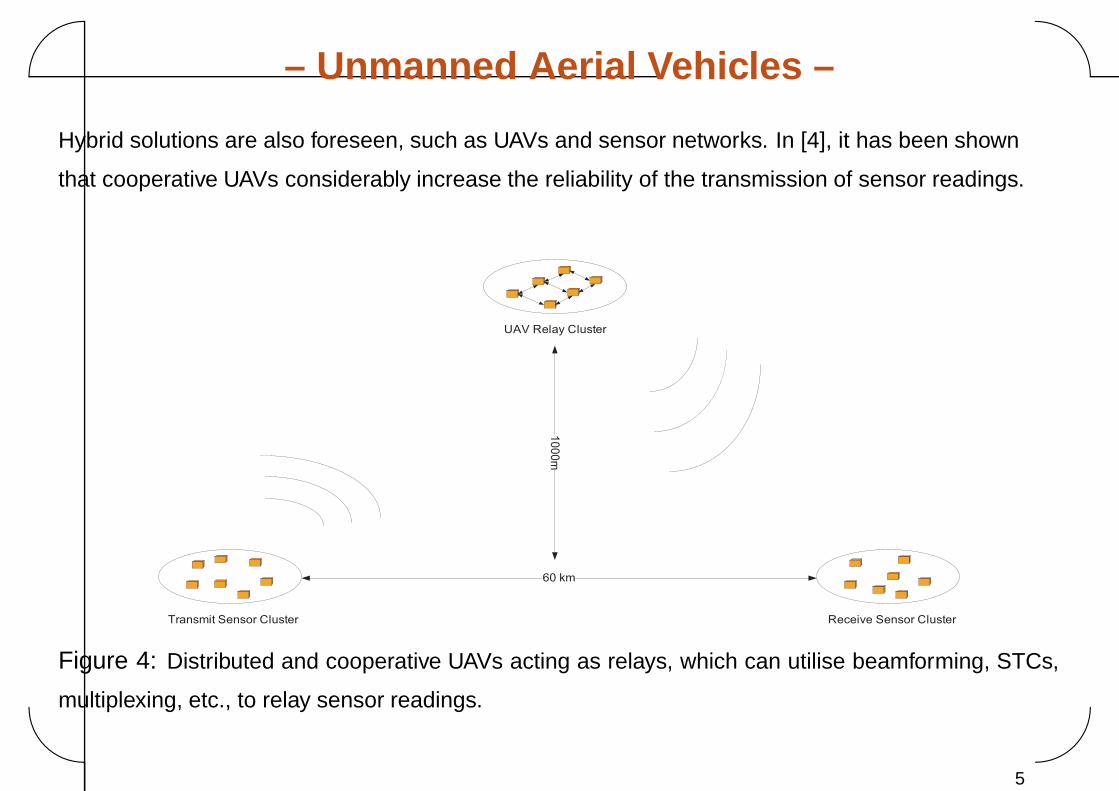
Hybrid solutions are also foreseen, such as UAVs and sensor networks. In [4], it has been shown
that cooperative UAVs considerably increase the reliability of the transmission of sensor readings.
Transmit Sensor Cluster Receive Sensor Cluster
60 km
UAV Relay Cluster
10
00
m
Figure 4: Distributed and cooperative UAVs acting as relays, which can utilise beamforming, STCs,
multiplexing, etc., to relay sensor readings.
5
�
�
�
�
– General Topology –
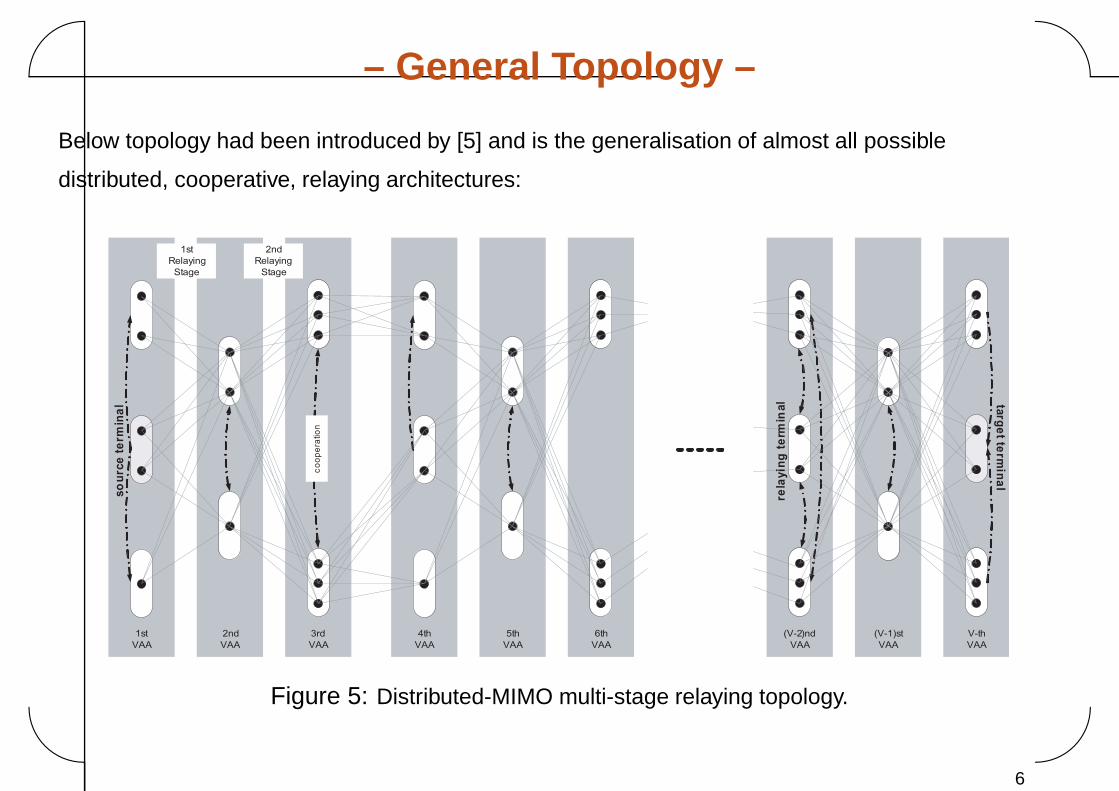
Below topology had been introduced by [5] and is the generalisation of almost all possible
distributed, cooperative, relaying architectures:
6th
VAA
5th
VAA
4th
VAA
(V-2)nd
VAA
(V-1)st
VAA
V-th
VAA
targ
et te
rmin
al
3rd
VAA
2nd
VAA
1st
VAA
so
urc
e t
erm
ina
l
1st
Relaying
Stage
2nd
Relaying
Stage
co
op
era
tion
rela
yin
g t
erm
inal
Figure 5: Distributed-MIMO multi-stage relaying topology.
6
�
�
�
�
– Design Dilemma –
• Above example systems have infinite design degrees of freedom, having triggered
endless white papers, conference and journal publications.
• Indeed, Google search results on ’cooperative AND relaying AND wireless’ yielded:
– 1999: a handful (beginning of my personal research on this subject);
– 2007: but already more than half a million in March 2007.
• All of these documents contain some related information; but, even if only 10% of them
are really useful to us, we would have to read and analyse 50,000 links. If we took 10
min for each, we would be occupied for 1 full year!
• Hence, my questions at the beginning of this presentation:
– Is it really useful to start working in an area which seems to be so well explored?
And if so, what are the areas which still need to be explored?
– Will these systems yield decades of research but barely any commercial products?
7
�
�
�
�
– Outline –
1. Preliminaries
2. Hardware Issues
3. Channel Characterisation
4. MAC and Cross-Layer Design
5. Conclusions & Road Ahead
8
�
�
�
�
PART 1PRELIMINARIES
9
�
�
�
�
Useful Definitions
10
�
�
�
�
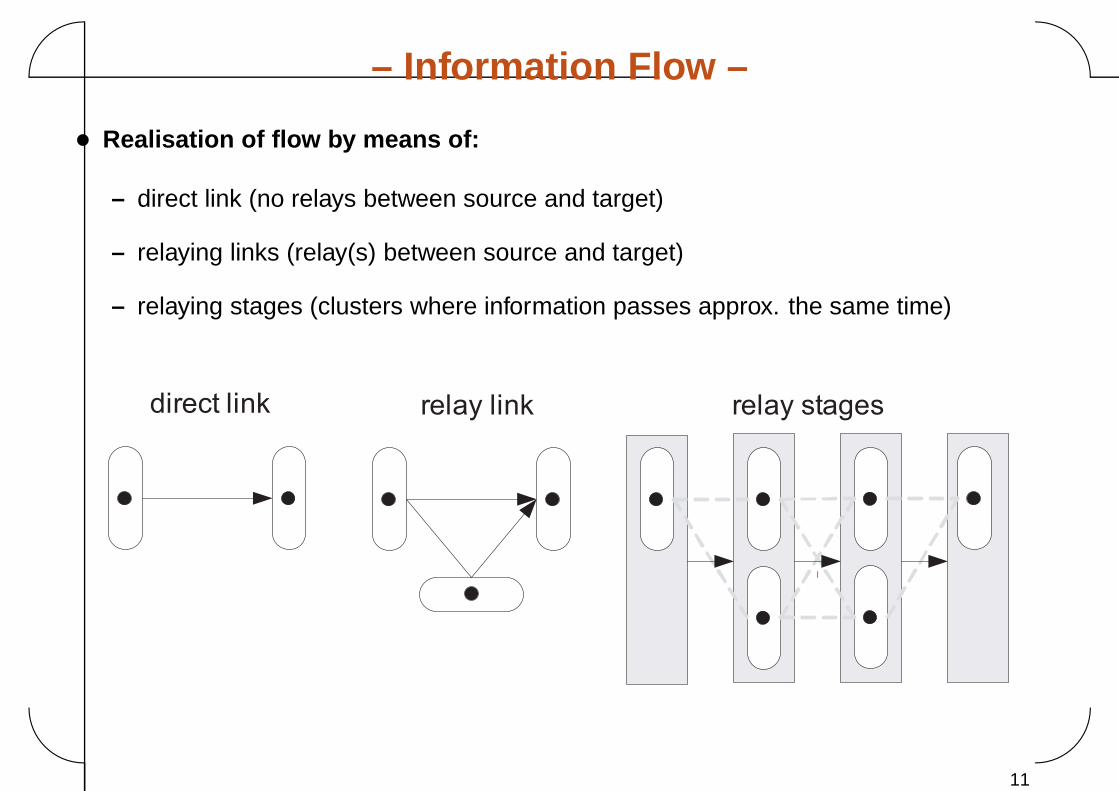
– Information Flow –
• Realisation of flow by means of:
– direct link (no relays between source and target)
– relaying links (relay(s) between source and target)
– relaying stages (clusters where information passes approx. the same time)
direct link relay link relay stages
11
�
�
�
�
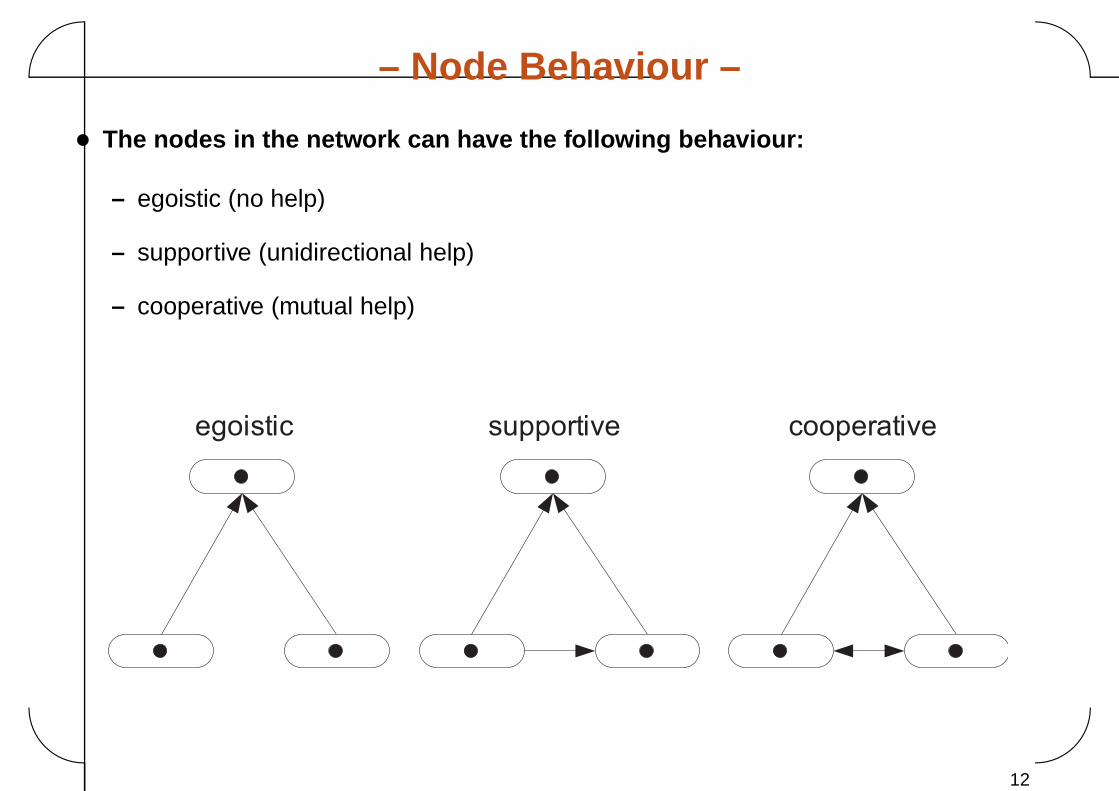
– Node Behaviour –
• The nodes in the network can have the following behaviour:
– egoistic (no help)
– supportive (unidirectional help)
– cooperative (mutual help)
egoistic supportive cooperative
12
�
�
�
�
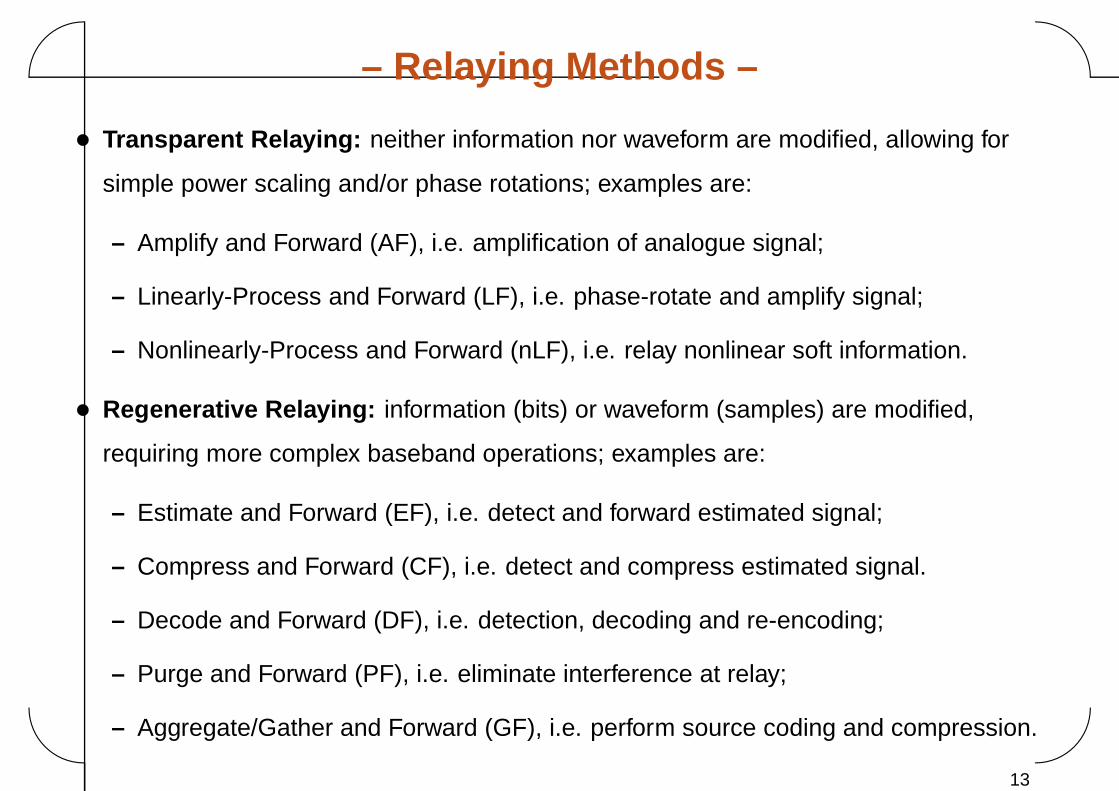
– Relaying Methods –
• Transparent Relaying: neither information nor waveform are modified, allowing for
simple power scaling and/or phase rotations; examples are:
– Amplify and Forward (AF), i.e. amplification of analogue signal;
– Linearly-Process and Forward (LF), i.e. phase-rotate and amplify signal;
– Nonlinearly-Process and Forward (nLF), i.e. relay nonlinear soft information.
• Regenerative Relaying: information (bits) or waveform (samples) are modified,
requiring more complex baseband operations; examples are:
– Estimate and Forward (EF), i.e. detect and forward estimated signal;
– Compress and Forward (CF), i.e. detect and compress estimated signal.
– Decode and Forward (DF), i.e. detection, decoding and re-encoding;
– Purge and Forward (PF), i.e. eliminate interference at relay;
– Aggregate/Gather and Forward (GF), i.e. perform source coding and compression.
13
�
�
�
�
Key Milestones
14
�
�
�
�
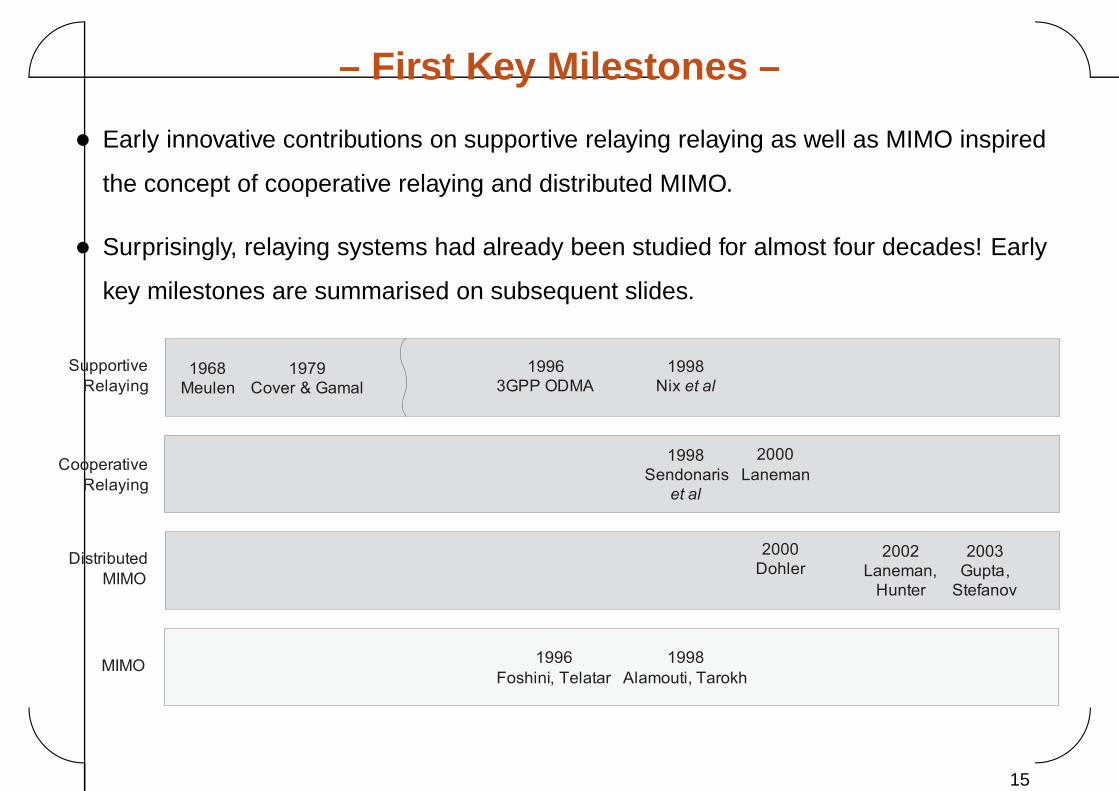
– First Key Milestones –
• Early innovative contributions on supportive relaying relaying as well as MIMO inspired
the concept of cooperative relaying and distributed MIMO.
• Surprisingly, relaying systems had already been studied for almost four decades! Early
key milestones are summarised on subsequent slides.
Supportive
Relaying
Cooperative
Relaying
1968
Meulen
1979
Cover & Gamal
2000
Dohler2002
Laneman,
Hunter
2003
Gupta,
Stefanov
2000
Laneman
1998
Sendonaris
et al
Distributed
MIMO
1996
3GPP ODMA
1998
Nix et al
MIMO1996
Foshini, Telatar
1998
Alamouti, Tarokh
15
�
�
�
�
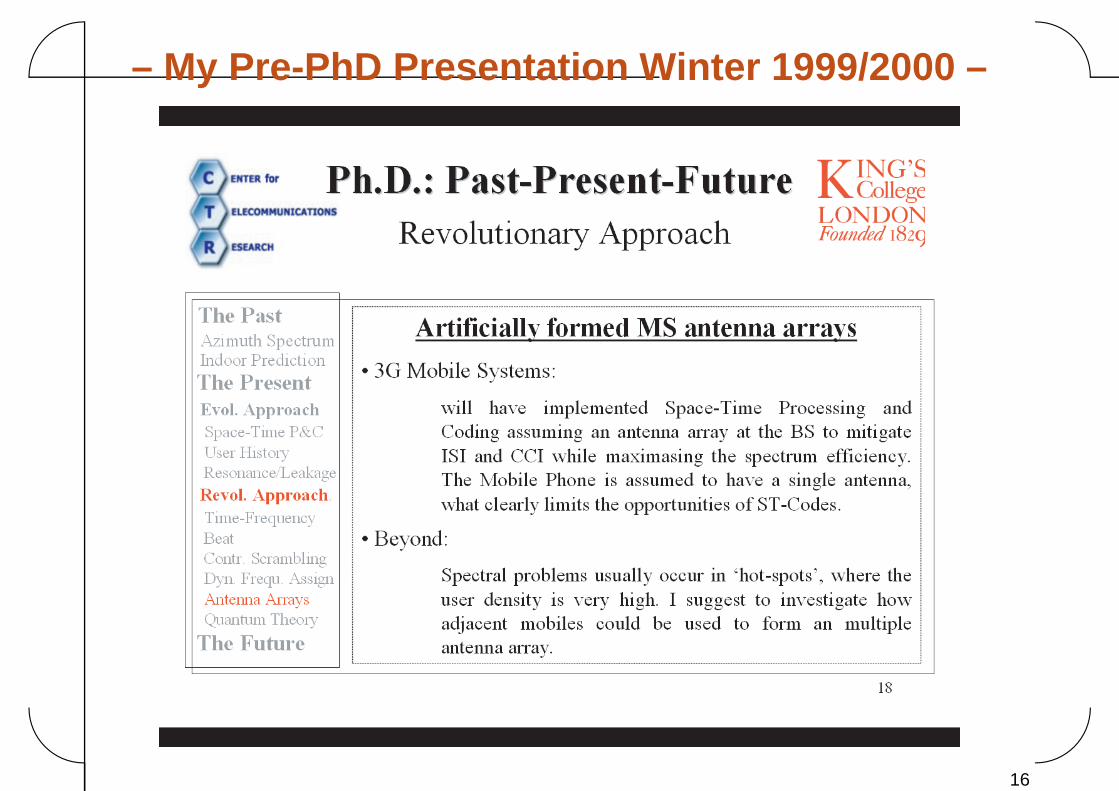
– My Pre-PhD Presentation Winter 1999/2000 –
16
�
�
�
�
Design Challenges
17

�
�
�
�
– System Design –
The design of any system is a very complex interplay between business and technology.
Business CaseServices, CAPEX, OPEX, etc.
RequirmentsScenario, Channel Model, Tx Powers, etc.
Performance AnalysisCapacity, Link & System Level, Formal Verfication, etc.
Algorithmic DesignPHY, MAC, NTW, Applications, etc.
Hardware Designµ-Controller, Memory, Amplifiers, etc.
18
�
�
�
�
PART 2HARDWARE ISSUES
19
�
�
�
�
Transparent Transceiver Design
20
�
�
�
�
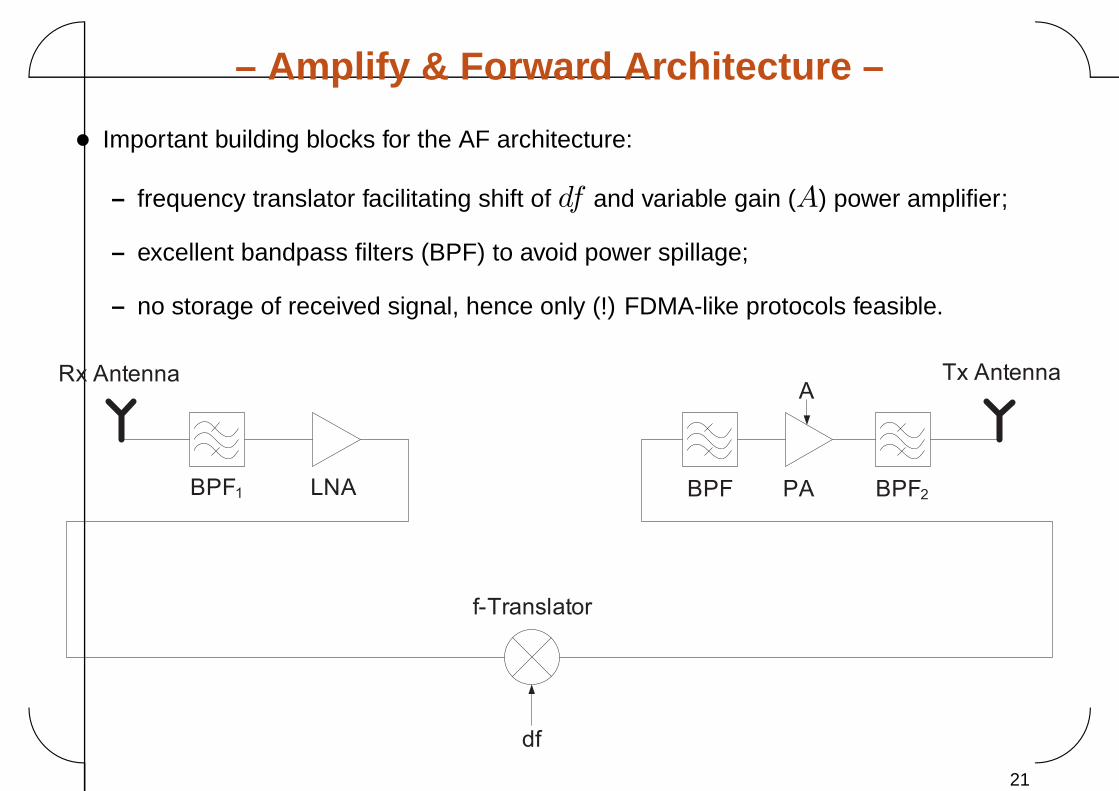
– Amplify & Forward Architecture –
• Important building blocks for the AF architecture:
– frequency translator facilitating shift of df and variable gain (A) power amplifier;
– excellent bandpass filters (BPF) to avoid power spillage;
– no storage of received signal, hence only (!) FDMA-like protocols feasible.
f-Translator
df
Rx Antenna
BPF1 LNA BPF PA
A
BPF2
Tx Antenna
21
�
�
�
�
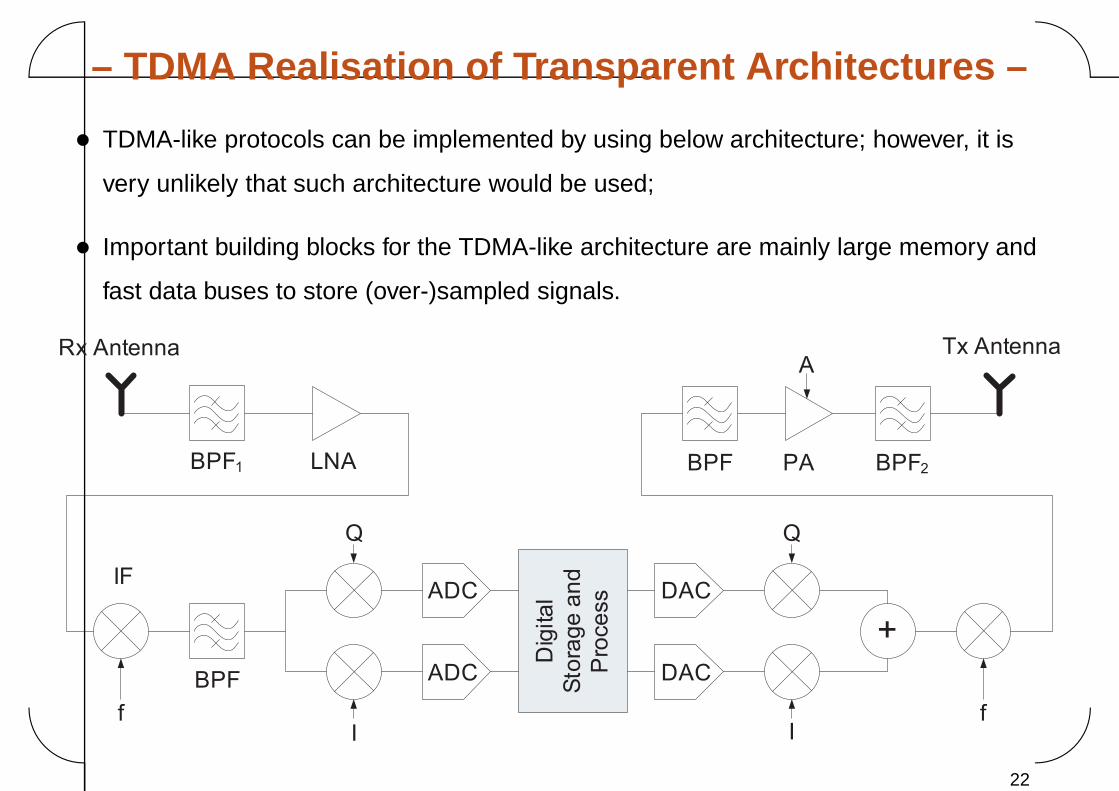
– TDMA Realisation of Transparent Architectures –
• TDMA-like protocols can be implemented by using below architecture; however, it is
very unlikely that such architecture would be used;
• Important building blocks for the TDMA-like architecture are mainly large memory and
fast data buses to store (over-)sampled signals.
Rx Antenna
BPF1 LNA
IF
f
BPF PA
A
BPF2
Tx Antenna
BPF
I
Q
ADC
ADC
Dig
ita
l
Sto
rag
e a
nd
Pro
ce
ss DAC
DAC
I
Q
+
f
22
�
�
�
�
Regenerative Transceiver Design
23
�
�
�
�
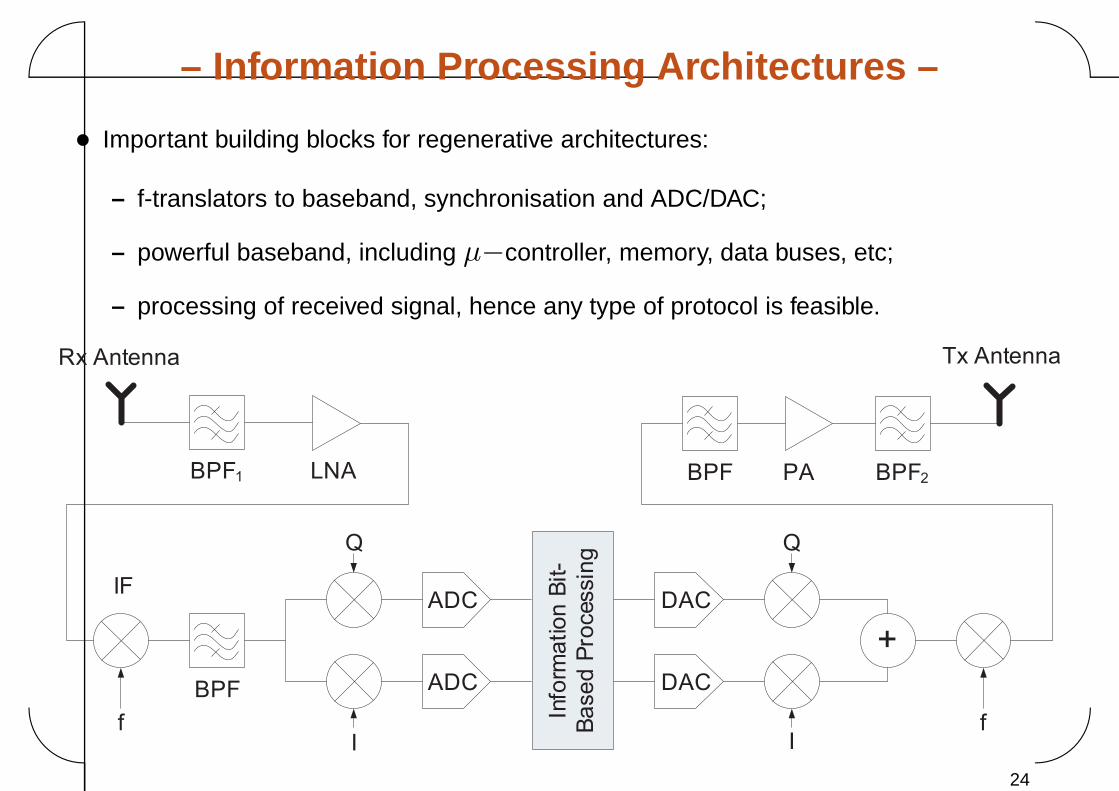
– Information Processing Architectures –
• Important building blocks for regenerative architectures:
– f-translators to baseband, synchronisation and ADC/DAC;
– powerful baseband, including μ−controller, memory, data buses, etc;
– processing of received signal, hence any type of protocol is feasible.
Rx Antenna
BPF1 LNA
IF
f
BPF PA BPF2
Tx Antenna
BPF
I
Q
ADC
ADC
DAC
DAC
I
Q
+
f
Info
rma
tio
n B
it-
Ba
se
d P
rocessin
g
24
�
�
�
�
Architectural Comparisons
25
�
�
�
�
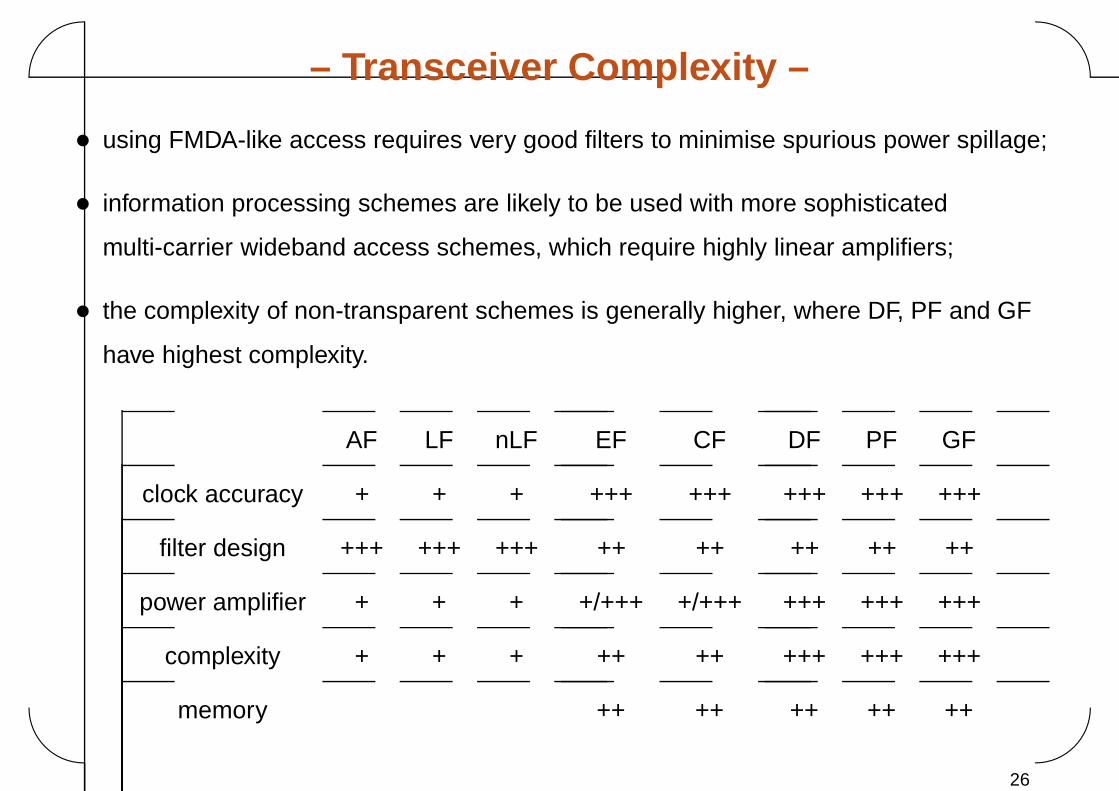
– Transceiver Complexity –
• using FMDA-like access requires very good filters to minimise spurious power spillage;
• information processing schemes are likely to be used with more sophisticated
multi-carrier wideband access schemes, which require highly linear amplifiers;
• the complexity of non-transparent schemes is generally higher, where DF, PF and GF
have highest complexity.
AF LF nLF EF CF DF PF GF
clock accuracy + + + +++ +++ +++ +++ +++
filter design +++ +++ +++ ++ ++ ++ ++ ++
power amplifier + + + +/+++ +/+++ +++ +++ +++
complexity + + + ++ ++ +++ +++ +++
memory ++ ++ ++ ++ ++
26
�
�
�
�
PART 3CHANNEL CHARACTERISATION
27
�
�
�
�
Regenerative Relaying Channel
28
�
�
�
�
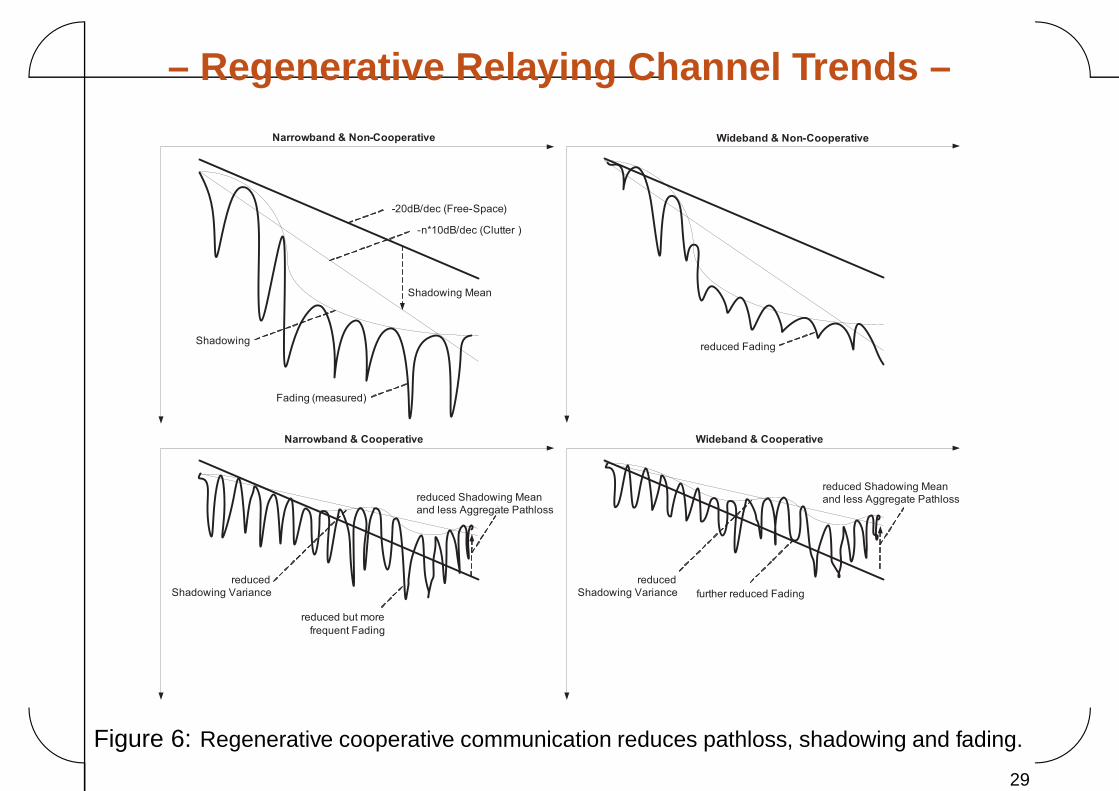
– Regenerative Relaying Channel Trends –
-20dB/dec (Free-Space)
-n*10dB/dec (Clutter )
Shadowing Mean
Shadowing
Fading (measured)
Narrowband & Non-Cooperative Wideband & Non-Cooperative
reduced Fading
Narrowband & Cooperative
reduced Shadowing Mean
and less Aggregate Pathloss
reduced
Shadowing Variance
Wideband & Cooperative
further reduced Fading
reduced Shadowing Mean
and less Aggregate Pathloss
reduced
Shadowing Variance
reduced but more
frequent Fading
Figure 6: Regenerative cooperative communication reduces pathloss, shadowing and fading.
29
�
�
�
�
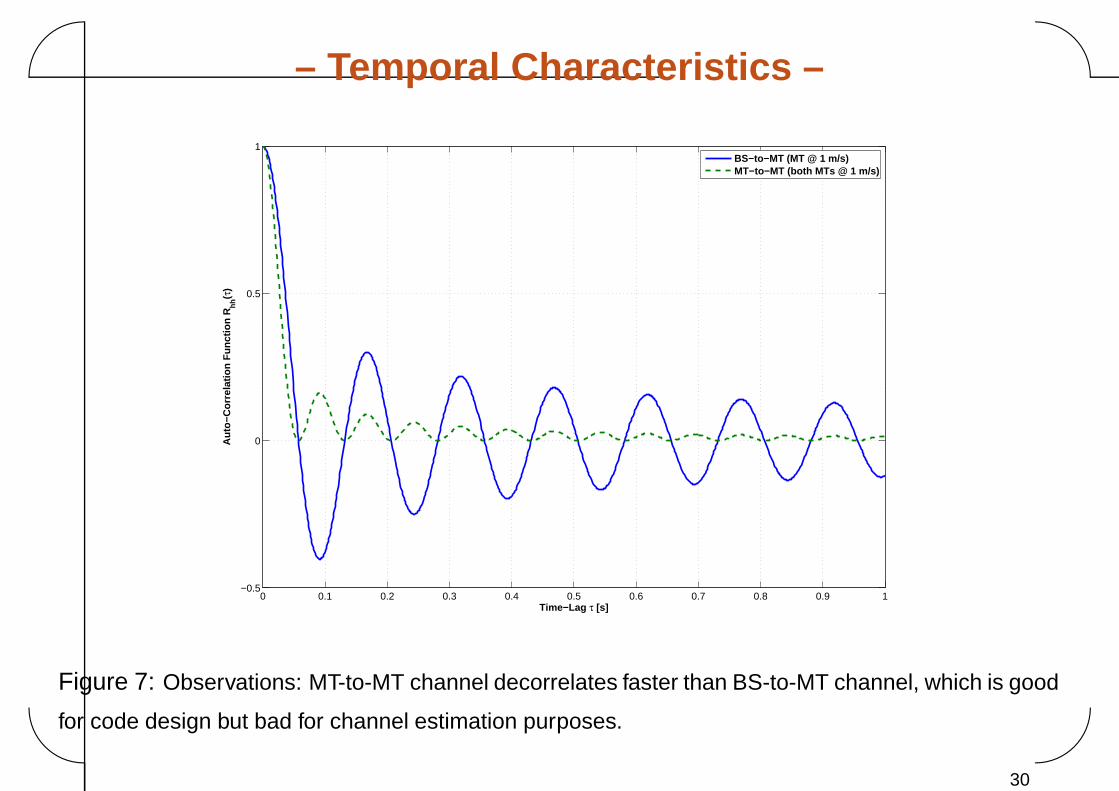
– Temporal Characteristics –
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−0.5
0
0.5
1
Time−Lag τ [s]
Au
to−C
orr
elat
ion
Fu
nct
ion
Rh
h(τ
)
BS−to−MT (MT @ 1 m/s)MT−to−MT (both MTs @ 1 m/s)
Figure 7: Observations: MT-to-MT channel decorrelates faster than BS-to-MT channel, which is good
for code design but bad for channel estimation purposes.
30
�
�
�
�
Transparent Relaying Channel
31
�
�
�
�
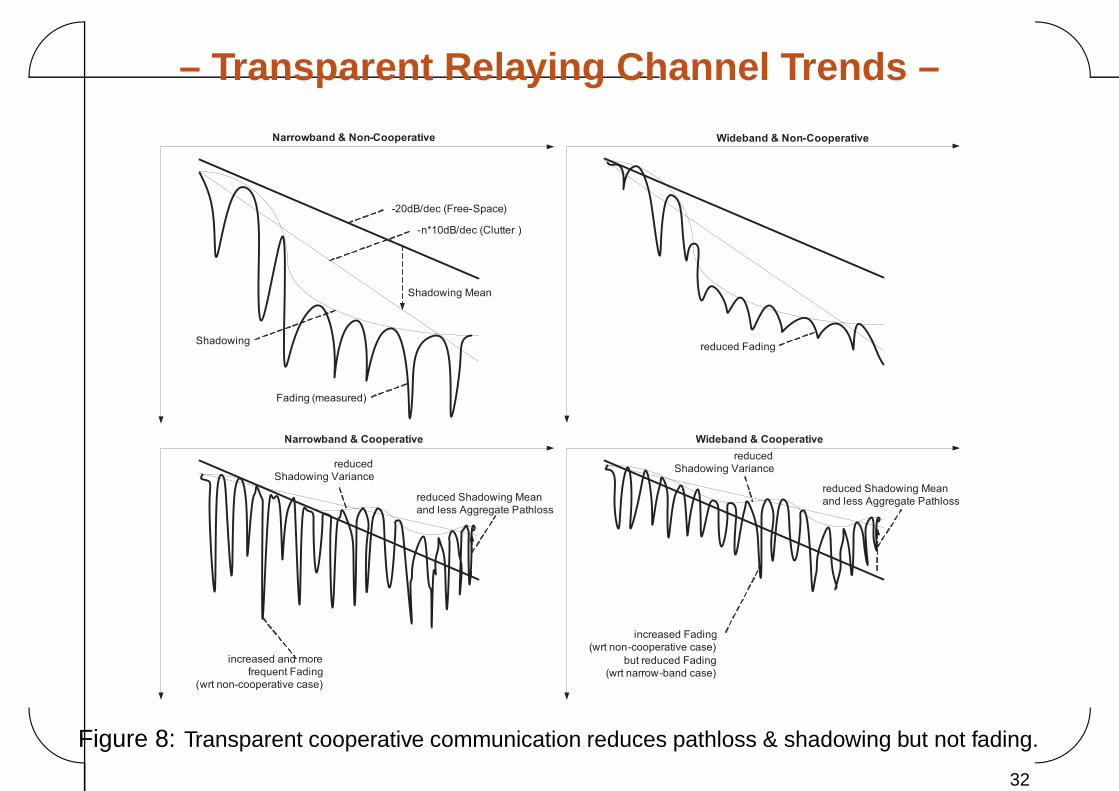
– Transparent Relaying Channel Trends –
-20dB/dec (Free-Space)
-n*10dB/dec (Clutter )
Shadowing Mean
Shadowing
Fading (measured)
Narrowband & Non-Cooperative Wideband & Non-Cooperative
reduced Fading
Narrowband & Cooperative
reduced Shadowing Mean
and less Aggregate Pathloss
reduced
Shadowing Variance
Wideband & Cooperative
reduced Shadowing Mean
and less Aggregate Pathloss
reduced
Shadowing Variance
increased and more
frequent Fading
(wrt non-cooperative case)
increased Fading
(wrt non-cooperative case)
but reduced Fading
(wrt narrow-band case)
Figure 8: Transparent cooperative communication reduces pathloss & shadowing but not fading.
32
�
�
�
�
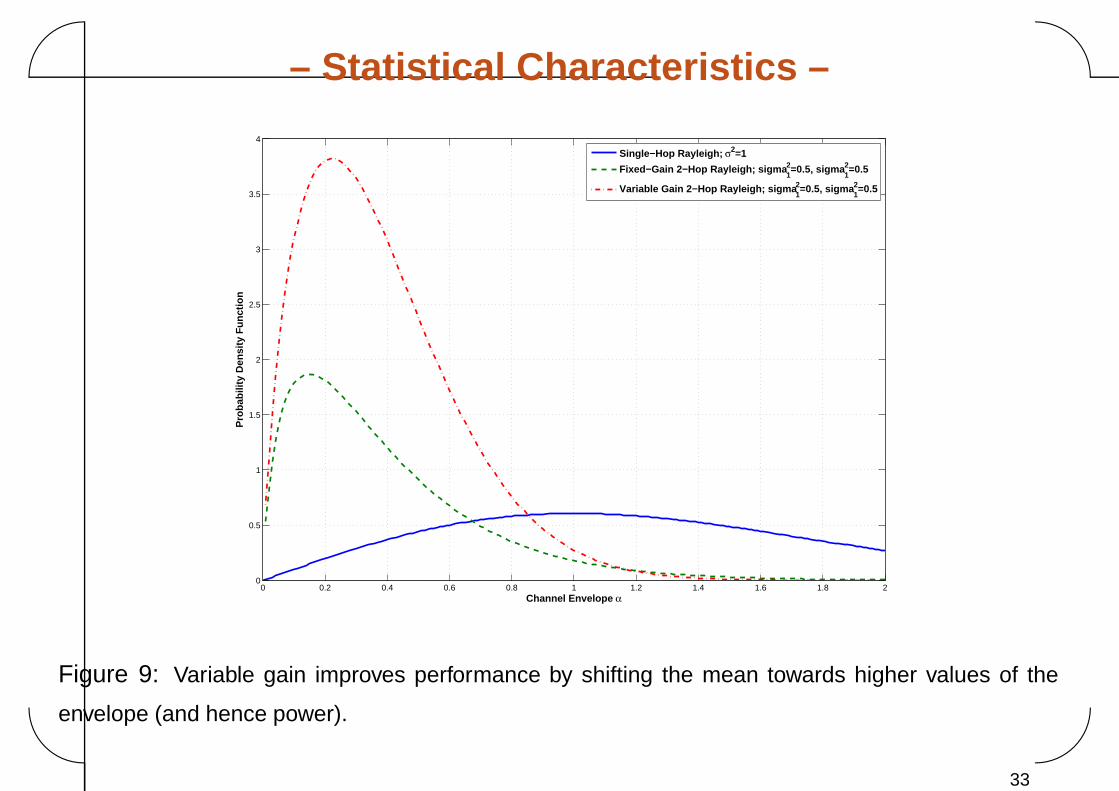
– Statistical Characteristics –
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.5
1
1.5
2
2.5
3
3.5
4
Channel Envelope α
Pro
bab
ility
Den
sity
Fu
nct
ion
Single−Hop Rayleigh; σ2=1
Fixed−Gain 2−Hop Rayleigh; sigma12=0.5, sigma
12=0.5
Variable Gain 2−Hop Rayleigh; sigma12=0.5, sigma
12=0.5
Figure 9: Variable gain improves performance by shifting the mean towards higher values of the
envelope (and hence power).
33
�
�
�
�
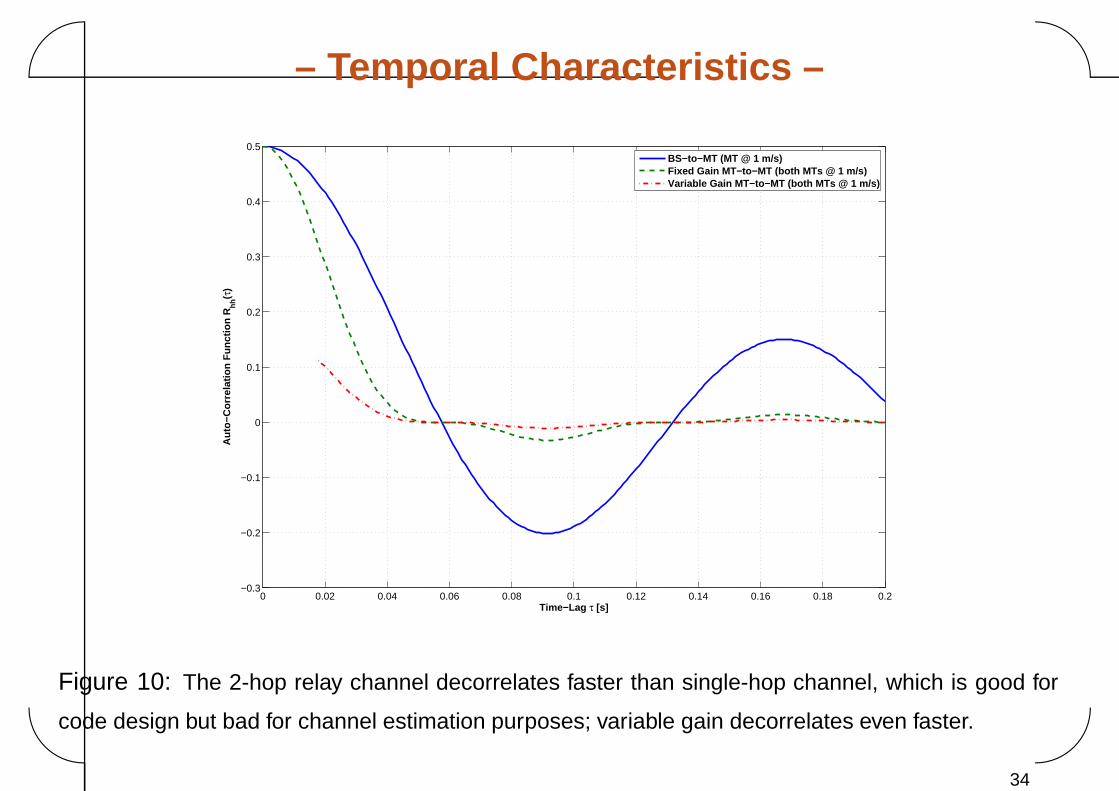
– Temporal Characteristics –
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
Time−Lag τ [s]
Au
to−C
orr
elat
ion
Fu
nct
ion
Rh
h(τ
)
BS−to−MT (MT @ 1 m/s)Fixed Gain MT−to−MT (both MTs @ 1 m/s)Variable Gain MT−to−MT (both MTs @ 1 m/s)
Figure 10: The 2-hop relay channel decorrelates faster than single-hop channel, which is good for
code design but bad for channel estimation purposes; variable gain decorrelates even faster.
34
�
�
�
�
Distributed MIMO Behaviour
35
�
�
�
�
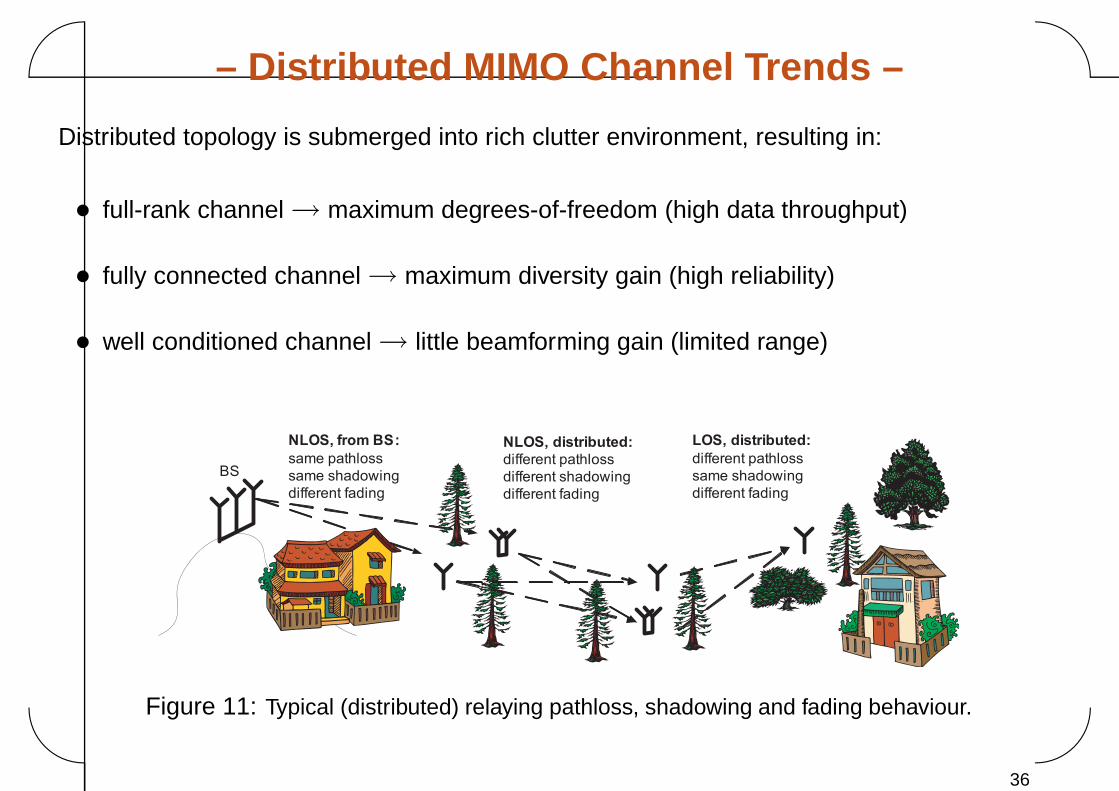
– Distributed MIMO Channel Trends –
Distributed topology is submerged into rich clutter environment, resulting in:
• full-rank channel → maximum degrees-of-freedom (high data throughput)
• fully connected channel → maximum diversity gain (high reliability)
• well conditioned channel → little beamforming gain (limited range)
NLOS, from BS:
same pathloss
same shadowing
different fading
NLOS, distributed:
different pathloss
different shadowing
different fading
LOS, distributed:
different pathloss
same shadowing
different fading
BS
Figure 11: Typical (distributed) relaying pathloss, shadowing and fading behaviour.
36
�
�
�
�
PART 4CSMA MAC & X-Layer Design
37
�
�
�
�
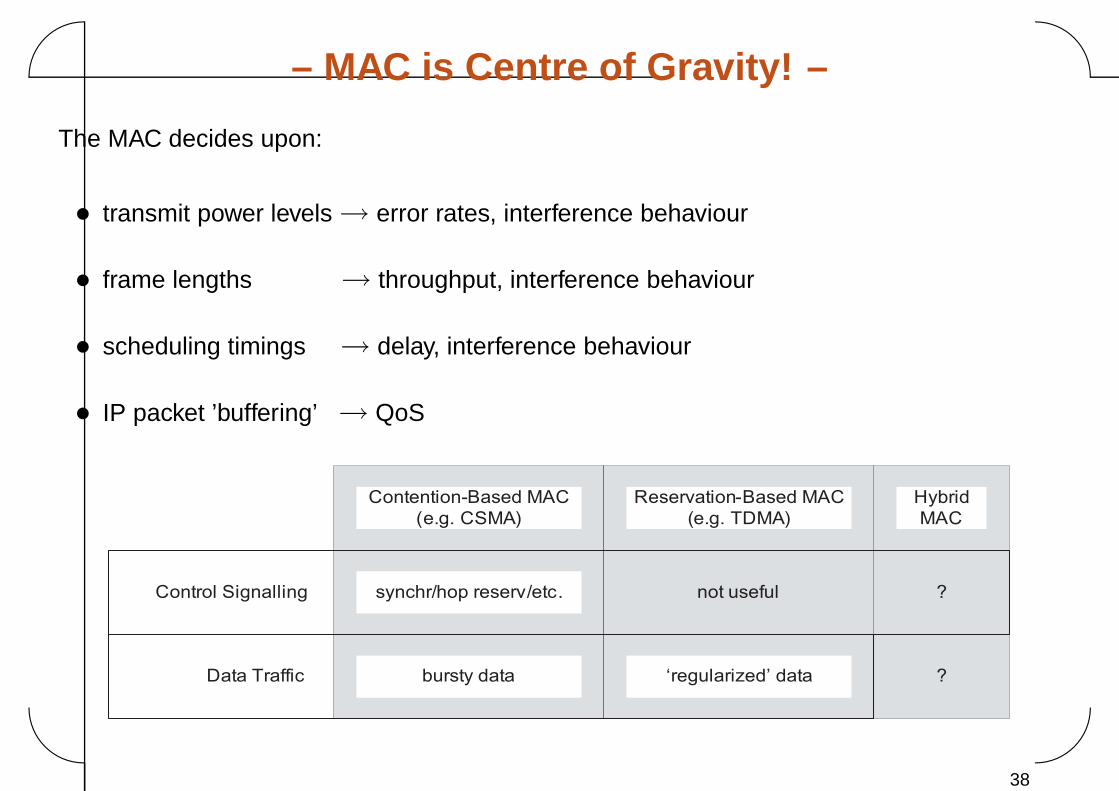
– MAC is Centre of Gravity! –
The MAC decides upon:
• transmit power levels → error rates, interference behaviour
• frame lengths → throughput, interference behaviour
• scheduling timings → delay, interference behaviour
• IP packet ’buffering’ → QoS
Contention-Based MAC
(e.g. CSMA)
Reservation-Based MAC
(e.g. TDMA)
Control Signalling
Data Traffic
synchr/hop reserv/etc. not useful
bursty data ‘regularized’ data
Hybrid
MAC
?
?
38
�
�
�
�
– Approach for CSMA-type MAC [1/3] –
We are interested in a general mathematical framework which quantifies:
• throughput (for bursty data)
• delay (for signalling and bursty data)
in dependency of
• node density, distribution & traffic
• transmission & interference radii
• pathloss/shadowing/fading models
which allows us to
• characterise performance of CSMA/4W-HS/SW-ARQ/etc protocols
• synthesise an optimum MAC
39
�
�
�
�
– Approach for CSMA-type MAC [2/3] –
Distributed
STC
Co
op
era
tio
n
So
urc
e N
od
e
Desti
nati
on
No
de
Coo
pera
tion
Coo
per
atio
n
Cooperation
Distributed
STC
STC
Sou
rce N
od
e
Destin
atio
n N
od
e
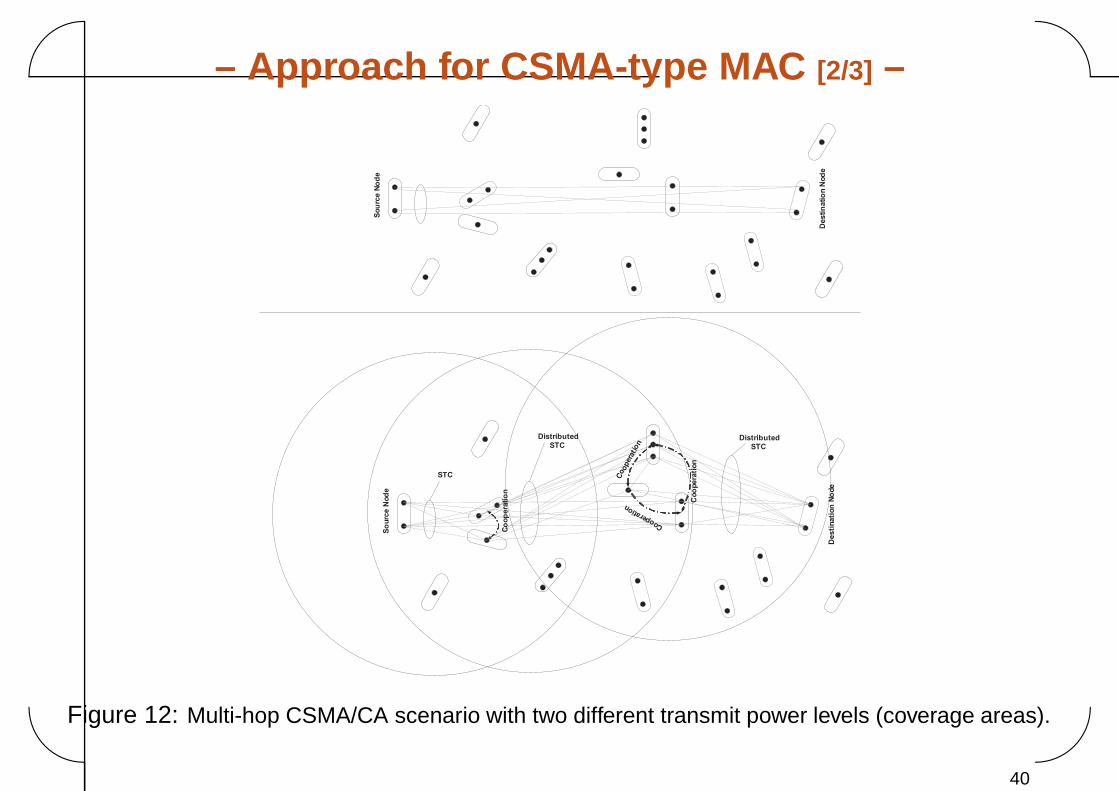
Figure 12: Multi-hop CSMA/CA scenario with two different transmit power levels (coverage areas).
40
�
�
�
�
– Approach for CSMA-type MAC [3/3] –
low modulation index (BPSK) high modulation index (64QAM)
→ low error rate (low prob. of loss) → high error rate (high prob. of loss)
→ long packets (high prob. of collision) → short packets (low prob. of collision)
Can we capture this trade-off analytically?
41
�
�
�
�
– CSMA-type PHY/MAC Optimisation [1/6] –
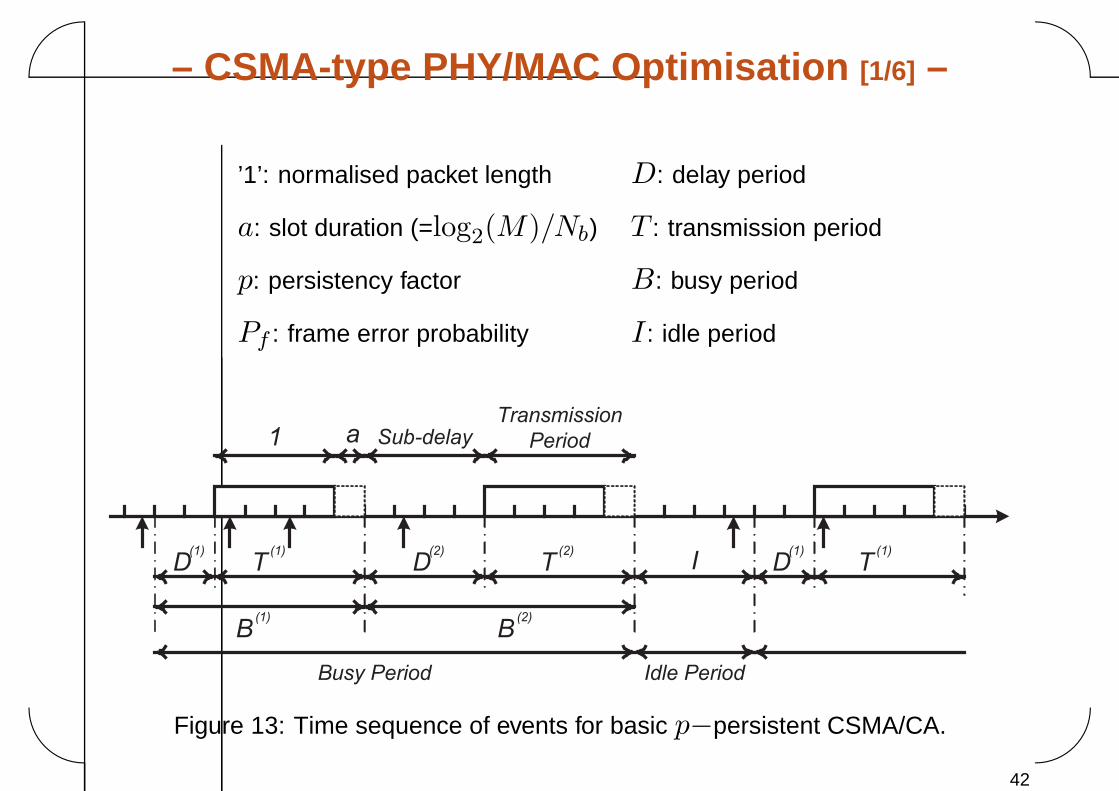
’1’: normalised packet length D: delay period
a: slot duration (=log2(M)/Nb) T : transmission period
p: persistency factor B: busy period
Pf : frame error probability I : idle period
D(1)
D(2)
D(1)
IT(1)
T(1)
T(2)
B(1)
B(2)
Busy Period Idle Period
a1 Sub-delayTransmission
Period
Figure 13: Time sequence of events for basic p−persistent CSMA/CA.
42
�
�
�
�
– CSMA-type PHY/MAC Optimisation [2/6] –
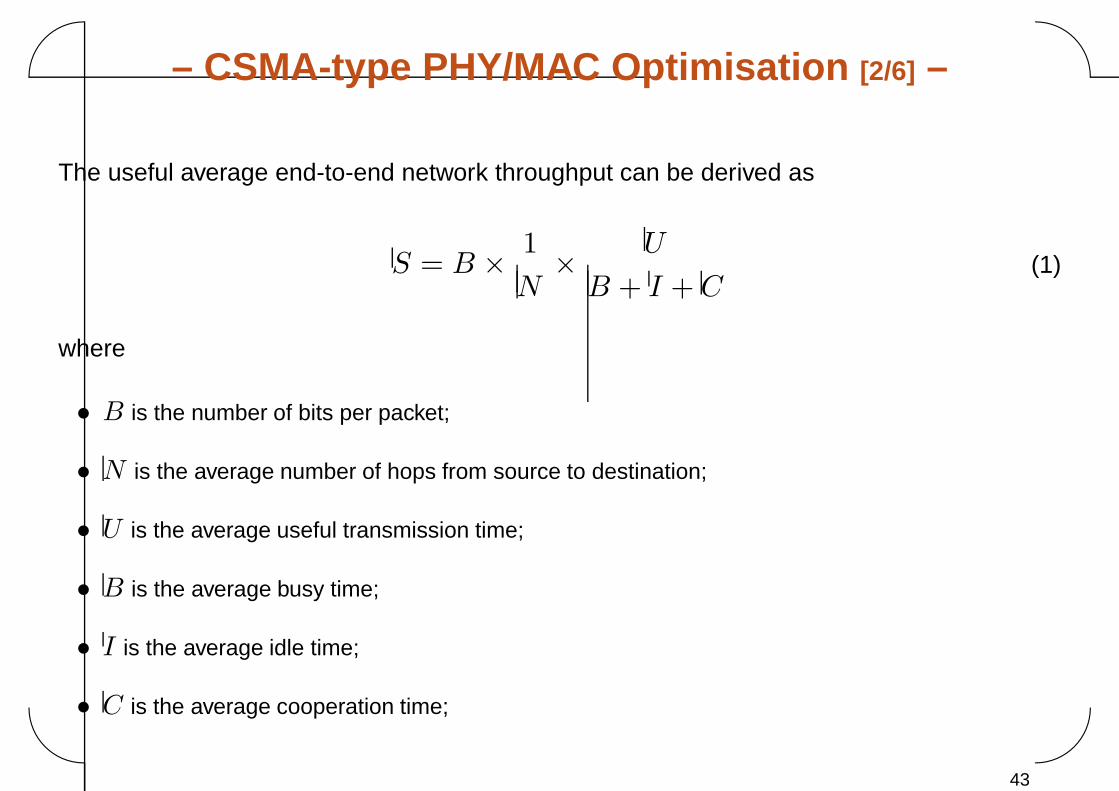
The useful average end-to-end network throughput can be derived as
S = B × 1N
× U
B + I + C(1)
where
• B is the number of bits per packet;
• N is the average number of hops from source to destination;
• U is the average useful transmission time;
• B is the average busy time;
• I is the average idle time;
• C is the average cooperation time;
43
�
�
�
�
– CSMA-type PHY/MAC Optimisation [3/6] –
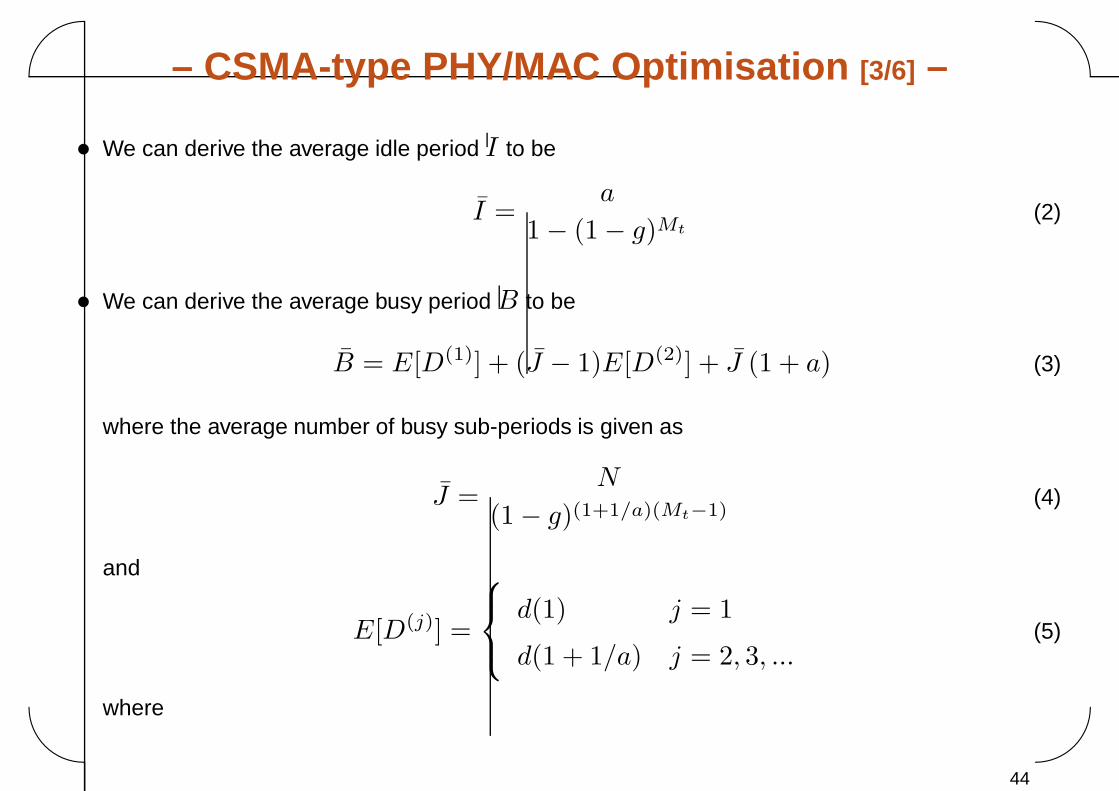
• We can derive the average idle period I to be
I =a
1 − (1 − g)Mt(2)
• We can derive the average busy period B to be
B = E[D(1)] + (J − 1)E[D(2)] + J (1 + a) (3)
where the average number of busy sub-periods is given as
J =N
(1 − g)(1+1/a)(Mt−1)(4)
and
E[D(j)] =
⎧⎨⎩
d(1) j = 1
d(1 + 1/a) j = 2, 3, ...(5)
where
44
�
�
�
�
– CSMA-type PHY/MAC Optimisation [4/6] –
d(X) =a
N − (1 − g)X(Mt−1)(6)
·∞∑
k=1
{N(1 − p)k − p
[(1 − p)k − (1 − g)k
p − g
]}
·{
(1 − p)k − p(1 − g)X
[(1 − p)k − (1 − g)k
p − g
]}Mt−1
− a(1 − g)X(Mt−1)
N − (1 − g)X(Mt−1)
∞∑k=1
[p(1 − g)k − g(1 − p)k
p − g
]Mt
• Similarly, we can derive the average useful period U to be
E[U (j)] =
⎧⎨⎩
u(1) j = 1
u(1 + 1/a) j = 2, 3, ...(7)
where
45
�
�
�
�
– CSMA-type PHY/MAC Optimisation [5/6] –
u(X) =p · (1 − Pf )
N − (1 − g)X(Mt−1)
∞∑k=0
{(1 − p)k+1 (8)
−p(1 − g)X
[(1 − p)k+1 − (1 − g)k+1
p − g
]}Mt−2
·{(1 − g)k(1 − p)k[N(1 − g)X − 1]
+Mt
{(1 − p)k − (1 − g)X
[p(1 − p)k − g(1 − g)k
p − g
]}
·{
N(1 − p)k+1 − p
[(1 − p)k+1 − (1 − g)k+1
p − g
]}}
−Mtgp(1 − g)X(Mt−1)
N − (1 − g)X(Mt−1)
∞∑k=1
[p(1 − g)k+1 − g(1 − p)k+1
p − g
]Mt−1
·[(1 − g)k − (1 − p)k
p − g
]
46
�
�
�
�
– CSMA-type PHY/MAC Optimisation [6/6] –
• The average cooperation time C is easily calculated as:
C =U · Nc
α, (9)
where
– U is the average useful transmission time;
– Nc is the number of cooperating links per relaying stage;
– α is the strength of the cooperative data-pipe w.r.t. the relaying pipe.
• Here, we assumed that a reservation based MAC protocol is used per cooperative stage.
• For the design and analysis of a CSMA-based MAC at the cooperative stage, please, consult [6].
47
�
�
�
�
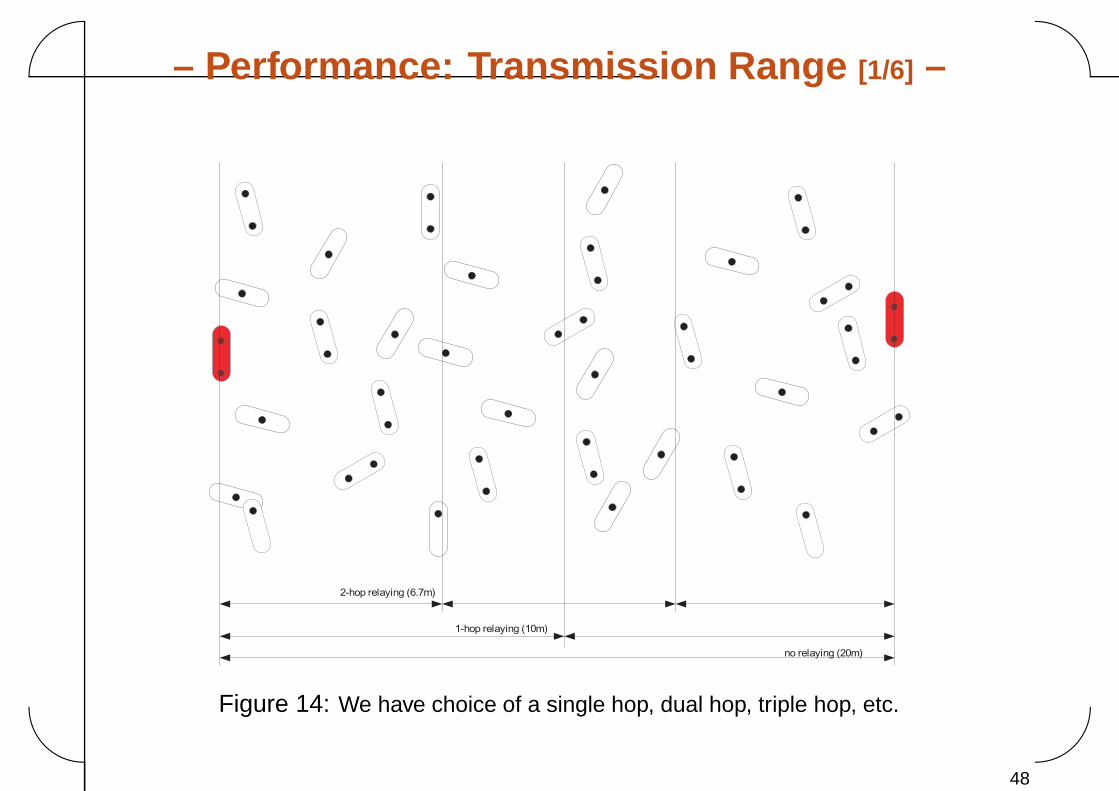
– Performance: Transmission Range [1/6] –
no relaying (20m)
1-hop relaying (10m)
2-hop relaying (6.7m)
Figure 14: We have choice of a single hop, dual hop, triple hop, etc.
48
�
�
�
�
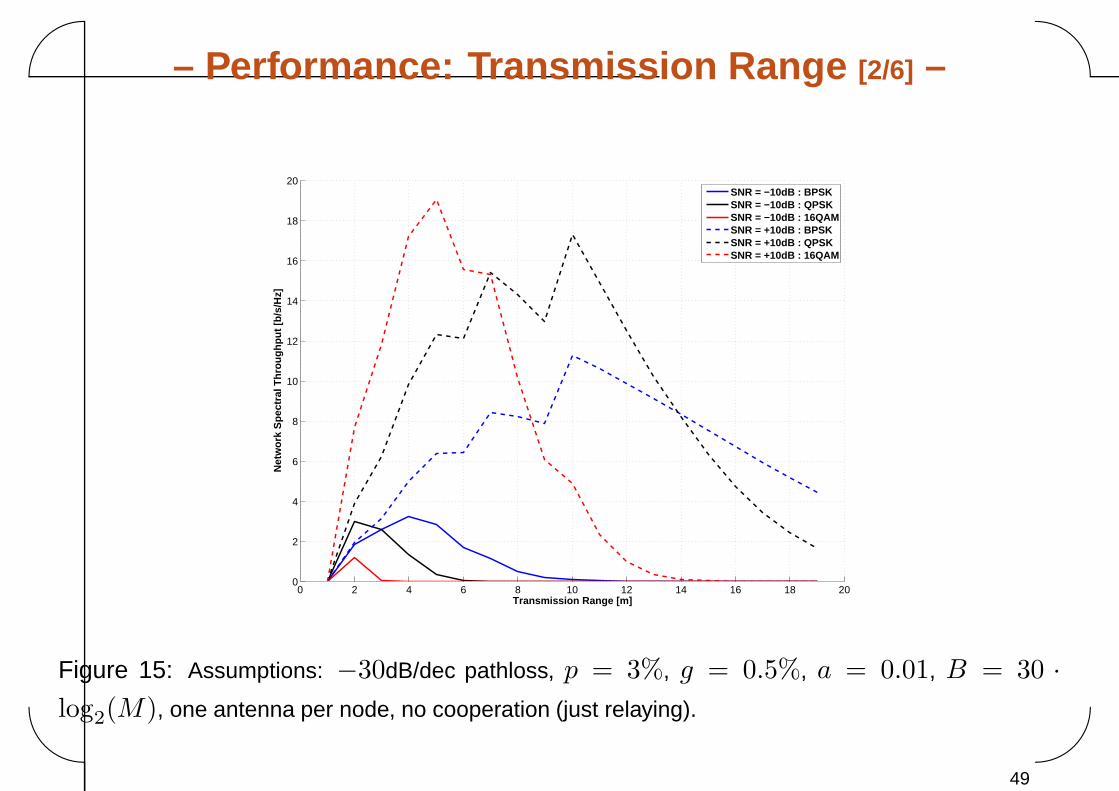
– Performance: Transmission Range [2/6] –
0 2 4 6 8 10 12 14 16 18 200
2
4
6
8
10
12
14
16
18
20
Transmission Range [m]
Net
wo
rk S
pec
tral
Th
rou
gh
pu
t [b
/s/H
z]
SNR = −10dB : BPSKSNR = −10dB : QPSKSNR = −10dB : 16QAMSNR = +10dB : BPSKSNR = +10dB : QPSKSNR = +10dB : 16QAM
Figure 15: Assumptions: −30dB/dec pathloss, p = 3%, g = 0.5%, a = 0.01, B = 30 ·log2(M), one antenna per node, no cooperation (just relaying).
49
�
�
�
�
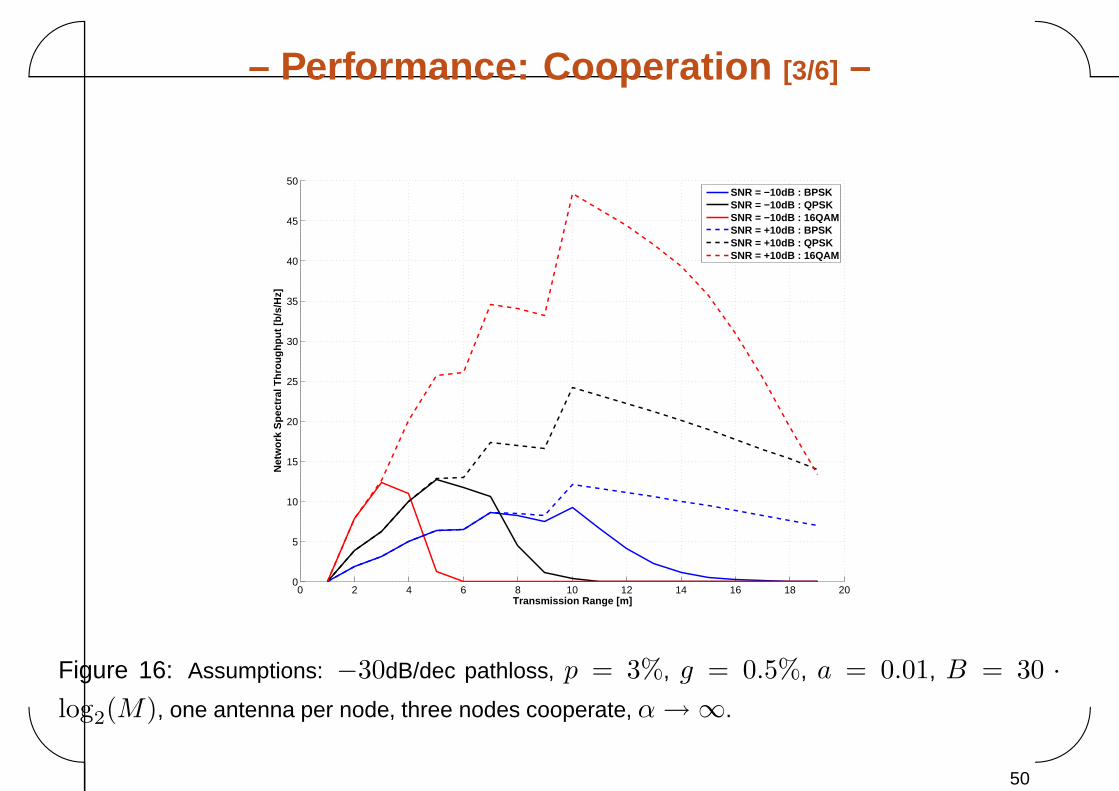
– Performance: Cooperation [3/6] –
0 2 4 6 8 10 12 14 16 18 200
5
10
15
20
25
30
35
40
45
50
Transmission Range [m]
Net
wo
rk S
pec
tral
Th
rou
gh
pu
t [b
/s/H
z]
SNR = −10dB : BPSKSNR = −10dB : QPSKSNR = −10dB : 16QAMSNR = +10dB : BPSKSNR = +10dB : QPSKSNR = +10dB : 16QAM
Figure 16: Assumptions: −30dB/dec pathloss, p = 3%, g = 0.5%, a = 0.01, B = 30 ·log2(M), one antenna per node, three nodes cooperate, α → ∞.
50
�
�
�
�
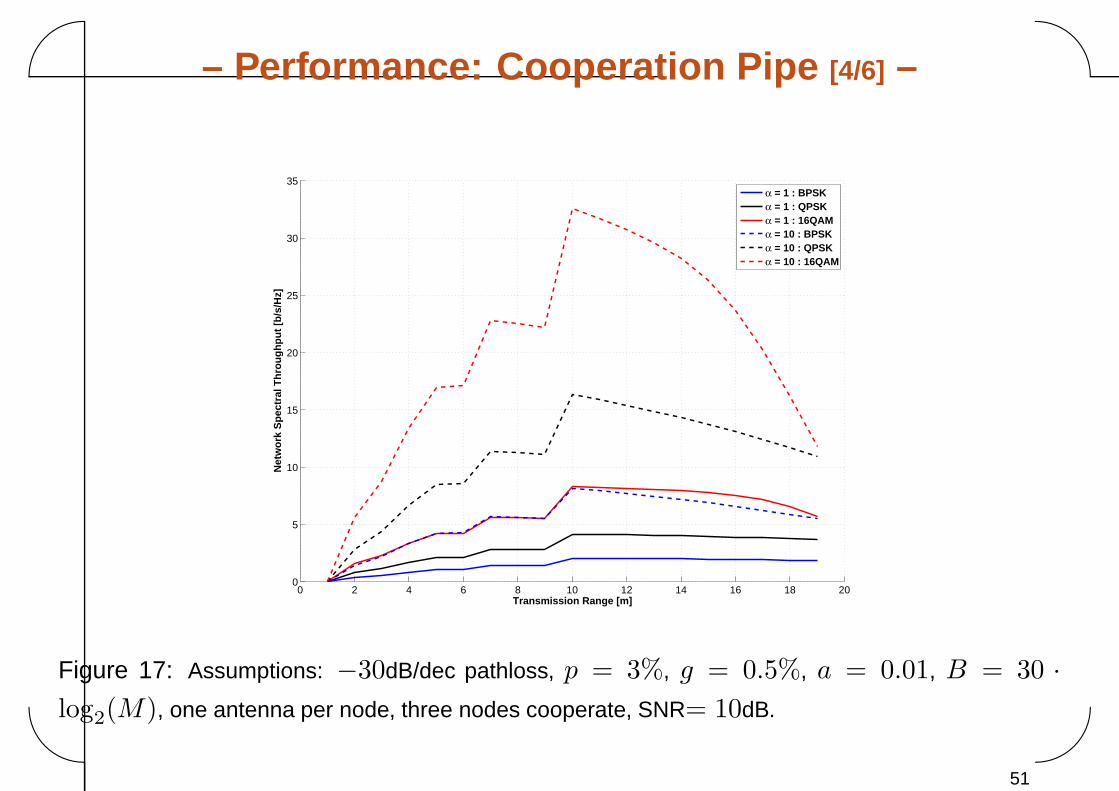
– Performance: Cooperation Pipe [4/6] –
0 2 4 6 8 10 12 14 16 18 200
5
10
15
20
25
30
35
Transmission Range [m]
Net
wo
rk S
pec
tral
Th
rou
gh
pu
t [b
/s/H
z]
α = 1 : BPSKα = 1 : QPSKα = 1 : 16QAMα = 10 : BPSKα = 10 : QPSKα = 10 : 16QAM
Figure 17: Assumptions: −30dB/dec pathloss, p = 3%, g = 0.5%, a = 0.01, B = 30 ·log2(M), one antenna per node, three nodes cooperate, SNR= 10dB.
51
�
�
�
�
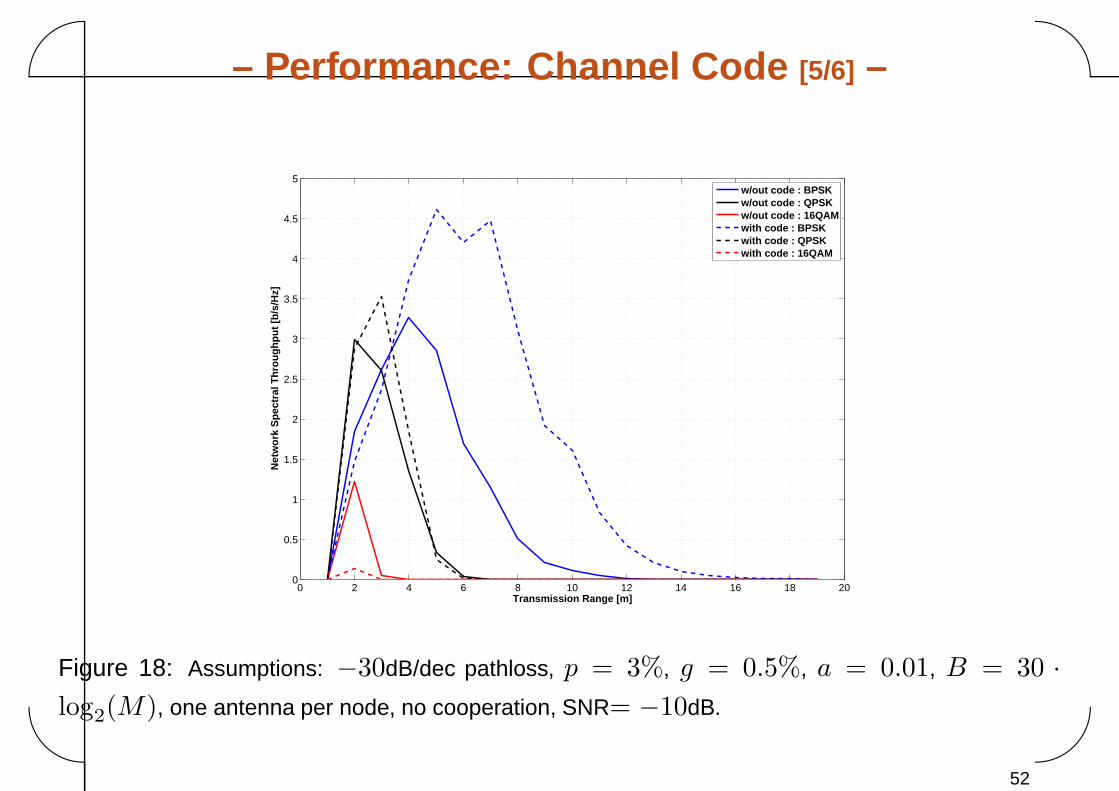
– Performance: Channel Code [5/6] –
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Transmission Range [m]
Net
wo
rk S
pec
tral
Th
rou
gh
pu
t [b
/s/H
z]
w/out code : BPSKw/out code : QPSKw/out code : 16QAMwith code : BPSKwith code : QPSKwith code : 16QAM
Figure 18: Assumptions: −30dB/dec pathloss, p = 3%, g = 0.5%, a = 0.01, B = 30 ·log2(M), one antenna per node, no cooperation, SNR= −10dB.
52
�
�
�
�
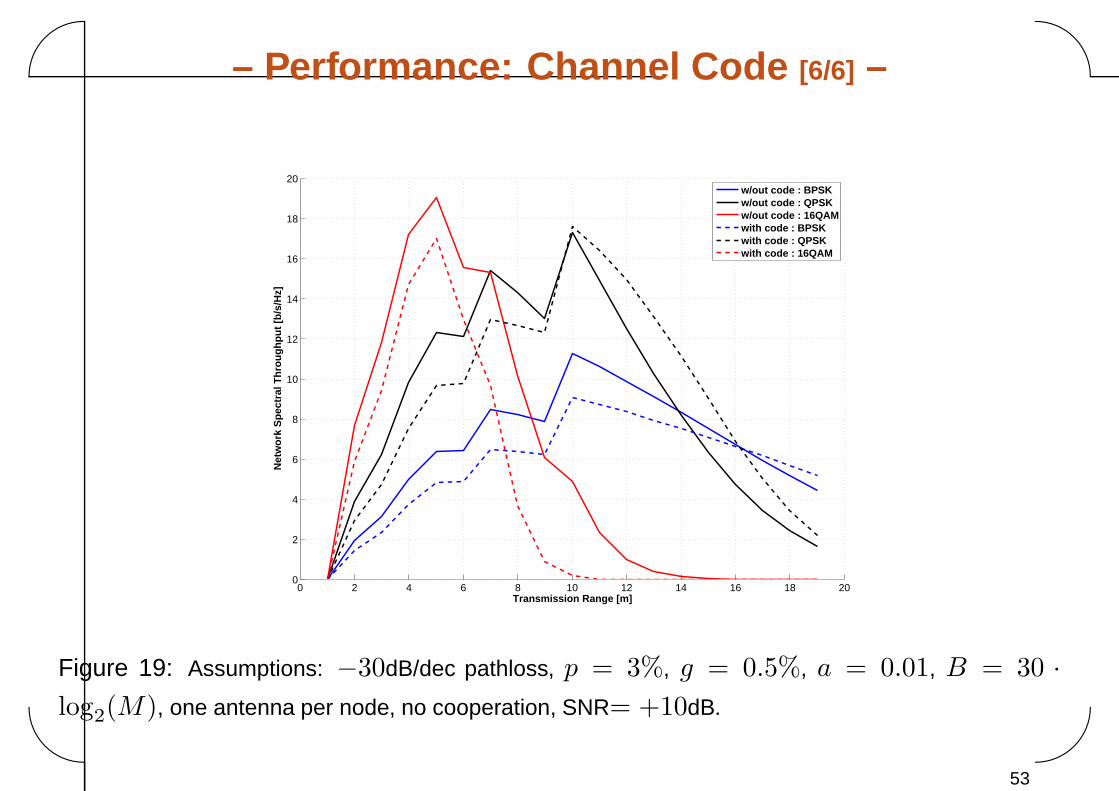
– Performance: Channel Code [6/6] –
0 2 4 6 8 10 12 14 16 18 200
2
4
6
8
10
12
14
16
18
20
Transmission Range [m]
Net
wo
rk S
pec
tral
Th
rou
gh
pu
t [b
/s/H
z]
w/out code : BPSKw/out code : QPSKw/out code : 16QAMwith code : BPSKwith code : QPSKwith code : 16QAM
Figure 19: Assumptions: −30dB/dec pathloss, p = 3%, g = 0.5%, a = 0.01, B = 30 ·log2(M), one antenna per node, no cooperation, SNR= +10dB.
53
�
�
�
�
PART 5CONCLUSIONS & ROAD AHEAD
54
�
�
�
�
– Some Thoughts –
• Capacity and algorithmic PHY layer designs are fairly well explored; despite numerous
unsolved problems, novel contributions are likely to be incremental.
• RF, MAC and cross-layer design are areas which are still in its infancy; there is hence a
lot of room for innovative contributions.
• What we need today in these type of networks are entirely novel approaches for system
analysis, such as from physics or biology.
• Commercial sensor and ad hoc network products are needed if cooperative systems do
not want to fall for the same fate as traditional ad hoc networks, which have been
researched for several decades without any tangible product on the civil market today.
• A valuable insight into the business value of relaying systems has been given by [7],
which is definitely worth reading!
55
�
�
�
�
REFERENCES
56
REFERENCES�
�
�
�
References
[1] 3G TR 25.924 V1.0.0 (1999-12) 3rd Generation Partnership Project, Technical Specification Group Radio Access
Network; Opportunity Driven Multiple Access.
[2] N. Esseling, E. Weiss, A. Krmling, W. Zirwas, “A Multi Hop Concept for HiperLAN/2: Capacity and Interference,” Proc.
European Wireless 2002 , Vol. 1, pp. 1-7, Florence, Italy, February 2002.
[3] I.F. Akyildiz, W. Su, Y. Sankarasubramaniam, E. Cayirci, “Wireless Sensor Networks: A Survey,” Computer Networks,
34(4):393-422, March 2002.
[4] R.C. Palat, A. Annamalai, J.H. Reed, “Cooperative Relaying for Ad-Hoc Ground Networks using Swarm UAVs,” Milcom
2005, Atlantic City, New Jersey, October 2005.
[5] M. Dohler, Virtual Antenna Arrays, PhD Thesis, University of London, King’s College London, London, UK, 2003.
[6] J. Alonso-Zarate, J. Gomez, C. Verikoukis, L. Alonso, A. Perez-Neira, “Performance Evaluation of a Cooperative
Scheme for Wireless Networks,” IEEE PIMRC 2006, September 2006, Conference CD-ROM, Helsinki, Finland.
[7] B. Timus, Deployment Cost Efficiency in Broadband Delivery with Fixed Wireless Relays, Licentiate Thesis, KTH,
Sweden, 2006.
57