Embed Size (px)
Citation preview

Outline
Classical Control
Lecture 2
Lecture 2 Classical Control

Outline
Outline
1 Review of Material from Lecture 1
2 New Stuff - Steady State
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
System PerformanceEffect of Poles
Outline
1 Review of Material from Lecture 1System PerformanceEffect of Poles
2 New Stuff - Steady StateTime Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
System PerformanceEffect of Poles
Analyzing System Performance
System types
Continuous system
Discrete system
Analysis domain
Time-domain specifications
Frequency-domain specifications
Different periods
Dynamic (transient) responses
Steady-state responses
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
System PerformanceEffect of Poles
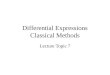
Continuous Time - Dynamic Response
0 2 4 6 8 10 12−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Impulse Response
Time (sec)
Am
plitu
de
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Step Response
Time (sec)
Am
plitu
de
num1=[1];
den1=[1 2 1];
num2=[1 2];
den2=[1 2 3];
impulse(tf(num1,den1),’b’,tf(num2,den2),’r’)
step(tf(num1,den1),’b’,tf(num2,den2),’r’)
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
System PerformanceEffect of Poles
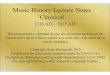
Continuous Time - Dynamic Response
0 2 4 6 8 10 120
0.1
0.4
0.6
0.9
1
1.2
1.4
Step Response
Time (sec)
Am
plitu
de
tr
Mp
1%
ts
tp
Overshoot(Mp)
Rise time (tr )
Settling time(ts)
Peak time (tp)
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
System PerformanceEffect of Poles
Natural Frequency and Damping
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
System PerformanceEffect of Poles
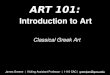
Poles in the Continuous s-plane
−1.6 −1.4 −1.2 −1 −0.8 −0.6 −0.4 −0.2 0−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
0.985
0.94
0.86
0.76
0.640.5
0.340.16
0.985
0.94
0.86
0.76
0.640.5
0.340.16
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
System PerformanceEffect of Poles
Poles in the Continuous s-plane
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Outline
1 Review of Material from Lecture 1System PerformanceEffect of Poles
2 New Stuff - Steady StateTime Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Short description of different reference inputs
Position reference
Servo-motorsPosition tracking (robots)
Velocity reference
AC-motorsVehicles
Acceleration reference
Space shuttle (during launch)Force exerting systems
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Conversion from Time Domain to Laplace Domain
Position
Time Domain
Linear, x(t)Rotational, θ(t)
Laplace
Linear, X (s)Rotational, Θ(s)
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Conversion from Time Domain to Laplace Domain
Velocity
Time Domain
Linear, v(t) = x(t)Rotational, ω(t) = θ(t)
Laplace
Linear, V (s) = sX (s)Rotational, Ω(s) = sΘ(s)
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Conversion from Time Domain to Laplace Domain
Acceleration
Time Domain
Linear, a(t) = v(t) = x(t)Rotational, α(t) = ω(t) = θ(t)
Laplace
Linear, A(s) = sV (s) = s2X (s)Rotational, A(s) = sΩ(s) = s2Θ(s)
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Why look at steady-state conditions?
Different reference inputs
PositionVelocityAcceleration
Steady-state corresponds to the state a system settles inunder constant conditions
Constant reference can be interpreted differently
Constant position (no velocity or acceleration)Constant velocity (ramp/integration in position, noacceleration)Constant acceleration (ramp/integration in velocity,parabola/integration2 in position)
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
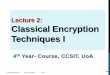
Diagram of Feedback System
General System
+
−
D(s) G (s)
H(s)
Unity Feedback System
+
−
D(s) G (s)
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Continuous Time - Steady-State - Unity Feedback
Laplace transform
F (s) =
∫
∞
0−f (t)e−st
dt
Final value theorem
limt→∞
f (t) = lims→0
sF (s)
Steady-state errors
ess = lims→0
sn
sn + Kn
1
sk
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Continuous Time - Steady-State - Unity Feedback
Type 0 - Kp = lims→0 D(s)G (s)
Step input Ramp input Parabolic input
ess1
1+Kp
1Kv
1Ka
Static error Kp =constant Kv = 0 Ka = 0
Error 11+Kp
∞ ∞
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Continuous Time - Steady-State - Unity Feedback
Type 1 - Kv = lims→0 sD(s)G (s)
Step input Ramp input Parabolic input
ess1
1+Kp
1Kv
1Ka
Static error Kp = ∞ Kv =constant Ka = 0
Error 0 1Kv
∞
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Continuous Time - Steady-State - Unity Feedback
Type 2 - Ka = lims→0 s2D(s)G (s)
Step input Ramp input Parabolic input
ess1
1+Kp
1Kv
1Ka
Static error Kp = ∞ Kv = ∞ Ka =constant
Error 0 0 1Ka
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Example 4.1
System
+
−
kpA
τs+1
Analysis of Steady-State Error
System type is ?
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Example 4.1
System
+
−
kpA
τs+1
Analysis of Steady-State Error
System type is 0(
L(s) =kpA
τs+1
)
Steady-State Error for Step:
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Example 4.1
System
+
−
kpA
τs+1
Analysis of Steady-State Error
System type is 0(
L(s) =kpA
τs+1
)
Steady-State Error for Step: ess = 1
1+lims→0kpA
τs+1
= 11+kpA
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Example 4.2
System
+
−
kp + kI
sA
τs+1
Analysis of Steady-State Error
System type is ?
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Example 4.2
System
+
−
kp + kI
sA
τs+1
Analysis of Steady-State Error
System type is 1
(
L(s) =(kp+
kIs
)A
τs+1 =A(kps+kI )s(τs+1)
)
Steady-State Error for Ramp:
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Example 4.2
System
+
−
kp + kI
sA
τs+1
Analysis of Steady-State Error
System type is 1
(
L(s) =(kp+
kIs
)A
τs+1 =A(kps+kI )s(τs+1)
)
Steady-State Error for Ramp: ess = 1
lims→0 sA(kps+kI )
s(τs+1)
= 1AkI
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Continuous Time - Steady-State
Laplace transform
F (s) =
∫
∞
0−f (t)e−st
dt
Final value theorem
limt→∞
f (t) = lims→0
sF (s)
Steady-state errors
ess = lims→0
1 − T (s)
sk
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Example 4.3
System
+
−
kp1
s(τs+1)
1 + kts
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Time Domain vs Laplace DomainSteady-State AnalysisUnity FeedbackGeneral Case
Example 4.3 - Continued
Analysis of Steady-State Error
ess = lims→0
1 − T (s)
sk
= lims→0
1
sk
(
1 −kp
s(τs + 1) + (1 + kts)kp
)
= lims→0
1
sk
s(τs + 1) + (1 + kts − 1)kp
s(τs + 1) + (1 + kts)kp
= lims→0
1
sk
s2τ + s(1 + ktkp)
s2τ + s(1 + ktkp) + kp
= 0 k = 0
=1 + ktkp
kp
k = 1
Lecture 2 Classical Control

Review of Lecture 1Steady State
Exercises
Book: Feedback Control
Problem 4.6 (a+b)
Problem 4.8 (a+b)
Problem 4.9
Lecture 2 Classical Control