Embed Size (px)
Citation preview

Chemical Plume Tracing
Jay A. Farrell, Professor
Department of Electrical Engineering
University of California, Riverside 92521
v: 909-787-2159
f: 909-787-2425
url: www.ee.ucr.edu/~farrell

• Objectives:– Develop strategies for an AUV to trace a chemical plume to
its source.
• Methods:– On-line deliberative planning– On-line reactive planning– On-line mapping
• Applications:– Detection, localization,
mapping of unexploded ordinance, thermal vents, etc
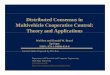
Autonomous Vehicle Based Chemical Plume Tracing

0
200
-2000200400600800
displacement in ‘x’
disp
lace
men
t in
‘z’
wind
side view
0
-200
200
0-75 75
disp
lac’
t in
‘z’
displac’t in ‘y’
wind
end viewdisplacement in ‘x’
wind
top view
0
100
0200400600-100
800
disp
lace
men
t in
‘y’
Graphics from Carde and Justus at UCR
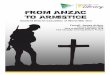
Moths, birds and other biological entities exhibit such cross-track oscillationsn
Moth Flight Tracks

CPT Challenges• Our goal is to track plumes to their source over near
kilometer distances
• Chemical distribution is intermittent and meandering: gradient following is not possible
• The chemical distribution is likely to be constrained to very low altitudes
• Approach: Decomposition into Plume Search Components
– Plume finding
– Plume tracking
– Plume reacquisition
– Declaration of success: “odor source at (x,y)”

Autonomous Vehicle Architecture

Behavior Switching

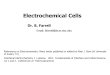
AUV Plume Tracing Simulation

7 of 8 Successful Missions- OpArea outlined in green- Trajectory in red- Chemical detections in blue
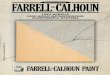
In-water Experimental Results

In-water Experimental Results

AUV Plume Tracing Experiments

Can we use Chemical Gradients?Movie by Todd Cowen, Cornell

Can Plume width predict range?
Movie by Todd Cowen

Acknowledgement:Funded by the
Office of Naval Research
Open Issues and Future Research:• algorithms to work robustly in the presence of multiple sources• algorithms to map “source free” areas• integration of additional behaviors incorporating data from other sensors

AUV Plume Tracing Experiments

Research Interests
• On-line function approximation based control
- Aircraft control subsequent to battle damage
- Respirator control (w/ local industry)
• High bandwidth cm level accuracy vehicle state estimation
- Snowplow guidance
- Automated highway systems
• Behavior based planning
- Chemical plume tracing