Embed Size (px)
Citation preview

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 1/113
CHEE 6330
Foundation of Mathematical Methods
in Chemical Engineering
Matrix Algebra
Lecture Notes
© Michael Nikolaou
Chemical & Biomolecular Engineering Department

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 2/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 2 -
How To Use These Notes:
•
As the cover page suggests, this text is a set of Lecture Notes, NOT a textbook!
• A number of sources, in addition to the textbook, as well as the author’s personal experience
have served as basis.
• While certain topics covered in detail in the required textbook of the course are presented
rather telegraphically, others are elaborated on, particularly when they refer to material not
covered in the textbook.
•
In many places throughout the notes some space has been intentionally left blank, for the
student to understand a certain topic by being forced to fill in the missing material. That is
frequently done during lecture time. That is why lectures are important!
•
In many other places assignments are given for HomeWork Not To Hand In (HWNTHI). Please
make sure that you complete all of that!
•
The examples have been carefully selected to correspond to a variety of problems of interest to
the evolving nature of chemical engineering. While the emphasis in these examples is on
mathematical methods, the physical picture in the background is also important and should be
understood.
• There are three basic software tools used throughout: Matlab, Mathematica, and Excel. Each
does certain tasks particularly well, while being adequate for others. While the particular
software or programming language a student learns is not important, it is important to be
familiar with at least one basic computational tool, along with the mathematical and
programming principles of computation.
•
The code included with some examples is intentionally kept simple, to illustrate concepts.
Professional code is a lot more complicated, although the numerical recipe involved is usually
not very different.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 3/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 3 -
Table of Contents
1. IN LIEU OF PREFACE ................................................................................................................................................... 4
2. SYSTEMS OF LINEAR ALGEBRAIC EQUATIONS ............................................................................................................ 5
2.1 WHY? ............................................................................................................................................................................. 5 2.2 DEFINITION ....................................................................................................................................................................... 5 2.3 SPECIAL MATRICES .............................................................................................................................................................. 5 2.4 MATRIX OPERATIONS .......................................................................................................................................................... 6 2.5 SYSTEMS OF LINEAR ALGEBRAIC EQUATIONS IN MATRIX FORM ..................................................................................................... 7 2.6 GEOMETRIC INTERPRETATIONS .............................................................................................................................................. 9 2.7 SCALAR, VECTOR, AND TENSOR OPERATIONS: A MATRIX APPROACH TO TRANSPORT PHENOMENA NOTATION ..................................... 11 2.8 SOLUTION METHODS FOR SYSTEMS OF LINEAR ALGEBRAIC EQUATIONS ........................................................................................ 23
2.8.1 Naïve Gauss elimination .................................................................................................................................... 24 2.8.2 The two phases of Gauss elimination ................................................................................................................ 25
2.8.3 Gauss elimination algorithm for Ax b ....................................................................................................... 27 2.8.4 Gauss elimination software ............................................................................................................................... 28 2.8.5 Time requirements for Gauss elimination.......................................................................................................... 30 2.8.6 Gauss elimination for equations with unknowns ..................................................................................... 32
2.8.7 LU decomposition .............................................................................................................................................. 34 2.8.8 Computation of the inverse of a matrix ............................................................................................................. 42 2.8.9 Computation of the determinant of a matrix .................................................................................................... 46 2.8.10 Numerical precision and pivoting ................................................................................................................. 48 2.8.11 Numerical precision and matrix conditioning ............................................................................................... 52 2.8.12 Matrix condition number .............................................................................................................................. 56
2.9 MATRIX RANK ................................................................................................................................................................. 66 2.9.1 Linear independence .......................................................................................................................................... 66 2.9.2 Basic facts about matrix rank ............................................................................................................................ 68 2.9.3 Matrix rank and solution of systems of linear equations .................................................................................. 69
3. EIGENVALUE/EIGENVECTOR PROBLEMS .................................................................................................................. 74
3.1 REVIEW
.......................................................................................................................................................................... 74 3.1.1 Solution of polynomial equations ...................................................................................................................... 80 3.1.2 Software for polynomial equations ................................................................................................................... 80 3.1.3 Software for eigenvalues ................................................................................................................................... 80
3.2 WHY EIGENVALUES AND EIGENVECTORS? .............................................................................................................................. 81 3.3 Q UADRATIC FORMS .......................................................................................................................................................... 91
3.3.1 Visualize quadratic forms .................................................................................................................................. 94 3.3.2 Optimization with quadratic forms and linear inequalities (quadratic programming) ..................................... 97 3.3.3 Quadratic programming in general ................................................................................................................. 101
4. SINGULAR-VALUE DECOMPOSITION (SVD) ............................................................................................................. 104
4.1 WHAT IS SINGULAR-VALUE DECOMPOSITION (SVD)? ............................................................................................................ 104 4.2 WHY SVD? .................................................................................................................................................................. 105
4.3 SOFTWARE FOR SVD ...................................................................................................................................................... 105 Notation:
Uppercase, boldface: Matrices. e.g. M Lowercase, boldface: vectors. e.g. v Lowercase, italics: scalars. e.g. f
m n

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 4/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 4 -
1. IN LIEU OF PREFACE
In November 1964 Richard P. Feynman (1918-1988), one of the most brilliant theoretical physicists,
Nobel laureate, and distinguished educator, was invited to deliver the Messenger Lectures at Cornell
University. This is an excerpt from his lectures taken from "The Character of Physical Law" by Richard
P. Feynman, MIT Press, 19671:
To summarize, I would use the words of Jeans, who said that "the Great Architect
seems to be a mathematician". To those who do not know mathematics it is difficult to get
across a real feeling as to the beauty, the deepest beauty, of nature. C.P. Snow talked about
two cultures. I really think that those two cultures separate people who have and people who
have not had this experience of understanding mathematics well enough to appreciate nature
once.
It is too bad that it has to be mathematics, and that mathematics is hard for some
people. It is reputed - I do not know if it is true - that when one of the kings was trying to
learn geometry from Euclid he complained that it was difficult. And Euclid said, "There is no
royal road to geometry". And there is no royal road. Physicists cannot make a conversion to
any other language. If you want to learn about nature, to appreciate nature, it is necessary to
understand the language that she speaks in. She offers her information only in one form; we
are not so unhumble as to demand that she change before we pay any attention.
All the intellectual arguments that you can make will not communicate to deaf ears
what the experience of music really is. In the same way all the intellectual arguments in the
world will not convey an understanding of nature to those of "the other culture". Philosophers
may try to teach you by telling you qualitatively about nature. I am trying to describe her.
But it is not getting across because it is impossible. Perhaps it is because their horizons are
limited in the way that some people are able to imagine that the center of the universe is man.
Also of interest on the subject:
Eugene Wigner, "The Unreasonable Effectiveness of Mathematics in the Natural Sciences,"
Communications in Pure and Applied Mathematics, vol. 13, No. I (February 1960).2
1 http://www.physicsteachers.com/pdf/The_Character_of_Physical_Law.pdf 2 http://www.dartmouth.edu/~matc/MathDrama/reading/Wigner.html

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 5/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 5 -
2. SYSTEMS OF LINEAR ALGEBRAIC EQUATIONS
2.1 Why?
a) Inherent in ChE problems (EXAMPLE 2, below)
b)
Many mathematical problems (analytical or numerical) reduced to linear algebraic equations
c)
Visit www.netlib.org.
2.2 Definition
11 12 13 1
21
1 2
rowˆ ˆ
|
|
column
n
ij
m m mn
a a a a
a
a A A m i
a a a
n
j
A
dim( ) m n A , m n A
2.3 Special matrices
− Symmetric
− Diagonal
−
Identity
− Upper triangular
− Lower triangular
−
Banded
−
Row matrix
− Column matrix
HWNTHI: Explore special matrix construction commands in Matlab, by typing
> hel p t oepl i t z> hel p hankel
> hel p eye> hel p zeros> hel p ones> hel p di ag
HWNTHI: Explore special matrix construction commands in Mathematica, such as the following.
Toepl i t zMat r i x, Hankel Mat r i x, I dent i t yMat r i x, Di agonal Mat r i x, Band.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 6/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 6 -
2.4 Matrix operations
1
:
, ( ) ( )
:
:
ij ij ij
ij ij
n
ij ik kj k
c a b
g b ga
c a b
C A B
A B B A A B C A B C
B A
C AB
[ ] [ ] [ ]m l m n n l
C A B
:T
ij ji a a A
( )
( )
T T T
T T T
A B A B
AB B A
( ) ( )AB C A BC ( Associative)
( ) , ( ) A B C AB AC A B C AC BC (Distributive, both left and right)
But
AB BA (Non-commutative)
1 1 1: A AA A A I 1 1 1( ) AB B A
1
trace( ) ˆn
ii i
a
A
B
A=
j
i
j
C
i

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 7/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 7 -
2.5 Systems of linear algebraic equations in matrix form
EXAMPLE 1 – VECTORS AND VECTOR OPERATIONS
2 3
4 5 6 15
7 8 15
w y
w y z
y z
1 2 0 3
4 5 6 15
0 7 8 15
w
y
z
xA b
1 Ax b x A b
or
1[ ] { } { } { } [ ] { }A x b x A b
11 1 12 2 1 1
21 1 22 2 2 2
1 1 2 2
.....
.....
.....
n n
n n
n n nn n n
a x a x a x b
a x a x a x b
a x a x a x b

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 8/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 8 -
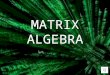
EXAMPLE 2 – MASS BALANCE VIA SYSTEM OF LINEAR ALGEBRAIC EQUATIONS
Fi gur e 1 – React i on- separat i on pr ocess uni t wi t h r ecycl i ng
Process data
100% conversion of A in R1
B4/B5 = 0.01; (moles)
D4/D5 = 100.
Material balances
Mixer:
A1 – A2 = 0 (1)
B1 + B5 – B2 = 0 (2)
D5 – D2 = 0 (3)
Reactor:
B3 – B2 + A2 = 0 (4)
D3 – D2 – A2 = 0 (5)
Separator:
D4 – 100D5 = 0 (6)
B4 – 0.01B5 = 0 (7)
B3 – B4 – B5 = 0 (8)
D3 – D4 – D5 = 0 (9)
11 Unknowns: A1, B1, A2, B2, D2, B3, D3, D4, B4, B5, D5
9 Equations
To be able to solve, must specify feed (A1, B1) or product (B4, D4)
HWNTHI: Write and solve the above equations in vector/matrix form Ax b .
Mixer M1A1B1
Reactor R1A B D
A2B2
D2
B3
D3
S e p a r a t o r C 1
B4D4
B5D5

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 9/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 9 -
2.6 Geometric interpretations
11 1 1
1 1
1
1
n
n n
m mn n
n
a a x
x x
a a x
a a
a a
(10)
EXAMPLE 3 – MATRIX-VECTOR MULTIPLICATION
1 2 3 1 2 3
1 2 0 1 2 0 1 2 0
4 5 6 4 5 6 4 5 6
0 7 8 0 7 8 0 7 8
w
y w y z w y z
z
xA a a a a a a
EXAMPLE 4 – MATRIX-VECTOR MULTIPLICATION: SPECIAL CASE
1 1
1 1 1 1 1 1
1 1
1 0 1 1
0 0 0 0 0 0
0 1 1 1n n n n n n
n n
n n
x x
x x x x x x x x
x x
e e e e
x I x e e e e
1{ , ..., }
n e e called standard unit vectors in
n .

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 10/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 10 -
EXAMPLE 5 – MATRIX-VECTOR MULTIPLICATION IN 3D EUCLIDEAN SPACE: IMPORTANT SPECIAL CASE
1 0 0 1 0 0
0 1 0 0 1 0
0 0 1 0 0 1
x x
y y x y z x y z
z z
i j k
v I v i j k
(11)
Fi gur e 2 – Gr aphi cal r epr esent ati on of uni t vect ors i n 3D Eucl i dean space.
{ , , }i j k (or1 2 3
{ , , }e e e or1 2 3
{ , , } or…) called standard unit vectors in3 (3D Euclidean space).
Incidentally: What is a space?
Definition 1 – Vector space
(Vector or linear) space is a set, V , associated with
(a) a field F (usually real or complex numbers);
(b) two operations:
addition of elements ,v w in V : v w , following the properties of addition of numbers, and
scalar multiplication of v in the set V by f in the field F ;
(c) two special but very simple properties: Every addition (sum v w of any two elements ,v w in V )
and every scalar multiplication (product fv of any v in V and any f in F ) results in an element in .V
EXAMPLE 6 – SETS THAT ARE OR ARE NOT SPACES
• Is 3 space over the field of reals ?
o Yes. Addition and scalar multiplication results in element of 3 .
• Is 3
1 2 3 1{[ ] | 1 1}T
V v v v v space over the field of reals ?
o No. Not every addition and scalar multiplication results in element of V .
1
1
0ˆ ˆ
0
i
2
01ˆ ˆ
0
j
1
1
3
0
0ˆ ˆ
1
k
x
y
z
1
0

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 11/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 11 -
2.7 Scalar, vector, and tensor operations: A matrix approach to transport phenomena notation
- What are scalars, vectors, and tensors?
o For the purposes of transport phenomena
Fi gur e 3 – Scal ar , ( col umn) vect or , and ( t wo- ) t ensor .
-
What are they good for?
o
Make life (thinking, modeling, computation, calculation) a lot easier
EXAMPLE 7 – THE INNER (SCALAR, DOT) PRODUCT
vw not well defined (except as dyadic product – see EXAMPLE 9 – The Dyadic Product, below).
Inner (or scalar or dot) product of real vectors ,v w :
ˆ ˆT T
i i i
v w v w w v v w (12)
Cauchy-Schwarz inequality3
2 2
1 1
v w
v w for any two vectors ,v w
2 2cos v w v w (13)
Geometric interpretation in Euclidean space (Figure 4): is the angle between ,v w .
Fi gur e 4 – Gr aphi cal r epr esent ati on of i nner product of t wo vect ors i n Eucl i dean space.
Is v w w v ?
Is ( ) ( ) z v w zw v ? (Hint: ( ) ( )T z v w z v w
3 Simple proof of Cauchy-Schwarz inequality: 20 ( ) ( ) ( ) (2 )c c c c v w v w v v v w w w for all c except
for c v w 0 Discriminant 0 2( ) ( )( ) 0 v w v v w w , with equal sign for c v w ( ,v w aligned).
cos v
w
v

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 12/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 12 -
EXAMPLE 8 – INNER (SCALAR, DOT) PRODUCT OF TWO VECTORS
1
2 1 2 3
3
T
v v ,
4
5 4 5 6
6
T
w w
4
1 2 3 5 32ˆ
6
T
i i i
v w
v w v w inner (or scalar or dot) product for real vectors ,v w .
EXAMPLE 9 – INNER PRODUCT OF UNIT VECTORS
1 1 1 1 1ˆ T e e e e (
1 1 1 1 1ˆ T )
1 2 1 2 0ˆ
T
e e e e ( 1 2 1 2 0ˆ
T
)General formula in terms of Kronecker delta,
ij :
1,ˆ
0,T
i j i j ij
i j
i j
(HWNTHI: Confirm.)
EXAMPLE 10 – THE DYADIC PRODUCT
1 4 5 6
2 4 5 6 8 10 12ˆ
3 12 15 18
T
vw vw often called dyadic product for real vectors ,v w .
Is vw wv ?
What is ( )T wv in terms of ,w v ?
Even though the dyadic product uses the same notation as the ordinary product between two vectors,
it is entirely different. Misinterpretation of one product for the other is a frequent source of errors.
It is a safe practice to always interpret the dyadic product vw as T vw and proceed with subsequent
calculations using standard vector/matrix algebra.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 13/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 13 -
EXAMPLE 11 – THE CROSS PRODUCT: A SPECIAL PRODUCT IN 3D EUCLIDEAN SPACE
2 3 3 2
1 2 3 2 3 3 2 3 1 1 3 1 2 2 1 3 1 1 3
1 2 3 1 2 2 1
( ) ( ) ( )ˆ
v w v w
v v v v w v w v w v w v w v w v w v w
w w w v w v w
i j k
v w i j k
Is v w w v ?
v w is orthogonal to both v and w , because
( ) _______________________ 0 v w v
( ) _______________________ 0 v w w
(HWNTHI: Verify.)
Geometric interpretation in 3D Euclidean space.
Fi gur e 5 – Gr aphi cal r epr esent ati on of cr oss product i n 3D Eucl i dean space.
EXAMPLE 12 –CROSS PRODUCT OF UNIT VECTORS
1 2 3
1 2 1 2 3 3
0
1 0 0 (0 0) (0 0) (1 0) 0ˆ
0 1 0 1
1 2 3
1 1 1 2 3
0
1 0 0 (0 0) (0 0) (0 0) 0ˆ1 0 0 0
General formula in terms of permutation epsilon:3
1i j ijk k k
where (the Levi-Civita is)
1, 123, 231, 312
1, 321, 132, 213
0, any two indices equalijk
ijk
ijk
2 3 3 2
3 1 1 3 2 2
1 2 2 1
sin
v w v w
v w v w
v w v w
vw v w
x y
z
1
2
3
v
v
v
1
2
3
w
w
w

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 14/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 14 -
EXAMPLE 13 – A SPECIAL VECTOR IN 3D EUCLIDEAN SPACE: THE DEL OPERATOR AND ASSOCIATED CONSTRUCTS
1 0 0 1 0 0
0 1 0 0 1 0ˆ
0 0 1 0 0 1
x x
y y
z z
x y z x y z
i j k
I i j k
(14)
Note:x y z
i j k unless partial derivatives are understood not to act on , ,i j k .
Misinterpretation leads to errors.
Gradient of scalar f :
1 0 0 1 0 0
0 1 0 0 1 0ˆ
0 0 1 0 0 1
f f
x x
f f
y y
f f
z z
f f f f f f f
x y z x y z
f
i j k
I i j k
(15)
Is f f ?
Divergence of vector v :
1
1 2 32
3
ˆ T
x y z
T
v v v v
v x y z
v
v v
v
(16)
Is v v ?
Gradient of vector v :
1
2
3
x
y
z
v
v
v
v not well defined (unless understood as the dyadic product ).
1 2 3
1 2 3
1 2 3
1 2 3
v v v
x x x x v v v T
y y y y
v v v
z z z z
v v v
v (17)

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 15/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 15 -
Curl or rot of vector w in 3D Euclidean space ( 3 ):
3 2
1 3
2 1
1 2 3
3 2 1 3 2 1
ˆ
( ) ( ) ( )
x y z
y z z x x y w w
y z
w w
z x
w w
x y
w w w
w w w w w w
i j k
w
i j k (18)
Note: The determinant expression for w contains some abuse of notation, in that the
determinant can only be expanded as shown in the above equation. Alternative expansions, e.g. along
the second or third row or along columns of the matrix
1 2 3
x y z
w w w
i j k
would lead to erroneous results.
EXAMPLE 14 – DOT PRODUCT OF VECTOR AND MATRIX (RECALL EQN. (12), DOT PRODUCT BETWEEN VECTORS)
( )T T T v A A v v A (19)
1 2 3
1 2 3
1 2 3
1 1 1
1 2 3 1 2 3 1 2 3
1 2 3 1
( ) [ ] [ ] [ ]
T T v v v
x x x x v v v T T T T
y y y y
v v v z z z z
v v v
x y z
v v v v v v v v v
v v v v
v v v v
2 2 2 3 3 3
1 1 1
2 2 2
3 3 3
2 3 1 2 3
1 2 3
1 2 3
1 2 3
T v v v v v v
x y z x y z
v v v
x y z
v v v
x y z
v v v
x y z
v v v v v
v v v
v v v
v v v
or
1 1 1 2 2 2 3 3 3
1 2 3 1 2 3 1 2 3 1 2 3
1 2 3 1 2 3 1 2 3
( ) [ ] [ ] [ ][ ]
...
T
x T T T T T
y x y z
z
T v v v v v v v v v
x y z x y z x y z
v v v v v v v v v v v v
v v v v v v v v v
v v v v
or

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 16/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 16 -
1 2 3 1 1 1 1 1 1
1 2 3 2 2 2
1 2 3 3 3 3
1 2 31 1
2 2
3 3
( )
T v v v v v v v v v
x x x x y z x y
v v v v v v T T T
y y y x y z
v v v v v v
z z z x y z
v v v v v
v v
v v
v v v v 2 2 2
3 3 3
1 2 3
1 2 3
z
v v v
x y z
v v v
x y z
v v v
v v v
vv not well defined (unless vv is interpreted as dyadic product ).
1 1
1
2 1 2 3
3
1 1 1 2 1 3
2 1 2 2 2 3
3 1 3 2 3 3
( ) ( ( )) [ ] [ ]
[ ]
T
T T T T
x y z
T
x y z
v v
x
v
v v v v
v
v v v v v v
v v v v v v
v v v v v v
vv vv
2 1 3 1 1 2 2 2 3 2 1 3 2 3 3 3
1 1 2 1 3 1
1 2 2 2 3 2
1 3 2 3 3 3
T v v v v v v v v v v v v v v v v
y z x y z x y z
v v v v v v
x y z v v v v v v
x y z v v v v v v
x y z
Is ( ) ( )T T T T vv v v ?

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 17/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 17 -
EXAMPLE 15 – A SPECIAL VECTOR: THE LAPLACE OPERATOR
2 ˆ (20)
Is 2 ?
Laplacian of scalar f :
2 2 22
2 2 2[ ] [ ]ˆ
f
x x f
x y z y x y z y
f
z z
f f f f f f
x y z
or
2 2 2 2 2 22
2 2 2 2 2 2[ ]ˆ
x
x y z y
z
f f f f f f f
x y z x y z
Laplacian of vector v :2 v v not well defined (unless the concept of dyadic product is used).
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
[ ]
[ ] [ ]
[ ]
x x
T
y y
z z
T
x
x y z y
z
v v v
x x x
v v v
x y z y y y
v v v
z z z
v v v
v v v
v
2 2 2 2 2 2 2 2 21 1 1 2 2 2 3 3 3
2 2 2 2 2 2 2 2 2
2 2 21 1 1
2 2 2
2 2 22 2 2
2 2 2
2 2 23 3 3
2 2 2
T
T v v v v v v v v v
x y z x y z x y z
v v v
x y z
v v v
x y z
v v v
x y z
or

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 18/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 18 -
2 2 2
2 2 2
2 2 21 1 1
2 2 2
2 2 22 2
2 2
1 2 3
1 2 3
1 2 3
[ ]
[ ] [ ]
( )[ ]
x x
T
y y
z z
T
x
x y z y
z
T
x y z
v v v
x y z
v v v
x y
v v v
v v v
v v v
v
2
2
2 2 23 3 3
2 2 2
z
v v v
x y z
Note: Cannot write1 2 3
1 2 3
1 2 3
1 2 3[ ]
T v v v
x x x x x x v v v T
y y y y y y
v v v
z z z z z z
v v v
v
(Why?)

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 19/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 19 -
EXAMPLE 16 – VECTOR/MATRIX CALCULATIONS WITH THE STRESS TENSOR
Think of the stress tensor as a matrix
ˆxx xy xz
yx yy yz
zx zy zz
(21)
or
11 12 13
21 22 23
31 32 33
ˆ
(22)
EXAMPLE 17 – MATRIX REPRESENTATION IN TERMS OF UNIT VECTORS
11 12 13
21 22 23
31 32 33
11 12 33
11 12
1
1 1
ˆ
1 0 0 0 1 0 0 0 0
0 0 0 0 0 0 ... 0 0 0
0 0 0 0 0 0 0 0 1
1 1
0 1 0 0 0 0 1 0
0 0T
33
2 3
33 3
1 1
0
... 0 0 0 1
1T T
T
ij i j i j
(23)
(Note: T
i j is standard vector/matrix notation of dyadic product
i j .)

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 20/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 20 -
EXAMPLE 18 – THE DOUBLE-DOT PRODUCT BETWEEN TENSORS (MATRICES)
: ˆij j i
i j
a b A B (24)
It can be shown that
: tr( ) tr( ) :̂ A B AB BA B A (25)
EXAMPLE 19 – DOUBLE-DOT PRODUCT FOR STRESS TENSOR
v not well defined (unless v is dyadic product)
1
2
3
1 2 3
1 1 1
1 2 3
2 2 2
1 2 3
3 3 3
11 12 13
21 22 23 1 2 3
31 32 33
11 12 13
21 22 23
31 32 33
:ˆ
:
x
T
x
x
v v v
x x x
v v v
x x x v v v
x x x
v v v
v
1 2 3
1 1 1
1 2 3
2 2 2
1 2 3
3 3 3
11 12 13
21 22 23
31 32 33
tr
i
j
v v v
x x x
v v v
x x x
v v v
x x x
v
ij x i j

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 21/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 21 -
EXAMPLE 20 – DOUBLE-DOT PRODUCT FOR UNIT VECTORS IN 3D EUCLIDEAN SPACE
BSL eqns. (A.3-1) – (A.3-6)4
3
13
1
( : ) ( )( )
] ( )
] ( )] ( )
] ]
] [ ]
i j k l j k i l jk il
i j k i j k i jk
i j k i j k ij k
i j k l i j k l jk i l
i j k i j k jkl i l l
i j k i j k ijl l k l
(26)
Translation into standard vector/matrix notation
3 3
1 13
1
: tr(( )) tr( ( ) ))
( )
( )
( )
( )
T T T T T T
i j k l i j k l i j k l jk il
T T
i j k i j k i jk
T T T T
i j k i j k ij k
T T T T T
i j k l i j k l jk i l
T T T
i j k i jkl l jkl i l l l
T
i j k ijl l l
3
1
T T
k ijl l k l
(27)
4 Note typo in eq. (A.3-4): extra .

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 22/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 22 -
EXAMPLE 21 – THE EQUATION OF MOTION
BSL eqn. (3.2-7), p. 80
[ ]t
v g (28)
Eqn. (28) in standard vector/matrix notation
( )
[ ]
x
y
z
yx xx zx
xy yy zy
xz
T T
t
T v
t xx xy xz x v
yx yy yz y t x y z
v
zx zy zz z t
x y z
x y z
g
g
g
v g
yz zz
x
y
z x y z
g
g
g
(29)
BSL eqn. (3.2-9), p. 80
[ ] [ ]t
p
v vv g (30)
Eqn. (30) in standard vector/matrix notation
( ( )) ( )
y x y x x x z x xx
y x y y y z y
y z z x z z z
T T T
t
v v v v v v v pt x y z x x v v v v v v v p
t x y z y
v v pv v v v v
z t x y z
p
v vv g
x zx
xy yy zy
yz xz zz
y z x
y x y z
z x y z
g
g
g
(31)
EXAMPLE 22 – THE EQUATION OF MECHANICAL ENERGY
BSL eqn. (3.3-2), p. 812 21 1
2 2ˆ ˆ( ) ( ( ) ) ( ) ( ) ( [ ]) ( : )
t v v p p
v v v v v (32)
Eqn. (32) in standard vector/matrix notation2 21 1
2 2ˆ ˆ( ) (( ) ) ( ) ( ) : T
t v v p p
v v v v v (33)

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 23/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 23 -
2.8 Solution methods for systems of linear algebraic equations
Two categories of methods
Direct : Gauss elimination
For dense matrices
Iterative: Gauss-Seidel (successive over-relaxation)
For large sparse matrices ( 510n )
(Mostly resulting from other problems,e.g. ODE, PDE, optimization)
Will not be covered in this course

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 24/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 24 -
2.8.1 Naïve Gauss elimination
EXAMPLE 23– NAÏVE GAUSS ELIMINATION
3 5
1 2 3 4 9
5 7 9 21
x y z
S x y z
x y z
2 2 6 10
2 12 3 4 9
x y z y z
x y z
5 5 15 252 6 4
5 7 9 21
x y z y z
x y z
Thus:
3 5
2 2 1
2 6 4
x y z
S y z
y z
2 4 2
2 22 6 4
y z z
y z
Therefore:
3 5 3.1
3 2 1 3.2
2 2 3.3
x y z S
S y z S
z S
3.2 3.1
3.3 1 2 1 1 1 3 5 1
S S
S z y y x x
2
5
2

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 25/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 25 -
2.8.2 The two phases of Gauss elimination
11 12 13 1
21 22 23 2
31 32 33 3
11 12 13 1
22 23 2
33 3
Forwardelimination
0
0 0
a a a b
a a a b
a a a b
a a a b
a a b
a b
33
33
2 23 3
222
1 12 2 13 31
11
Back-substitution
bx
a
b a x x
a b a x a x
x a

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 26/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 26 -
EXAMPLE 24 – EXAMPLE 22 IN MATRIX NOTATION
1 1 3 5
2 3 4 9 2
5 7 9 21 5
1 1 3 5
0 1 2 1
0 2 6 4 2
1 1 3 5
0 1 2 1
0 0 2 2

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 27/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 27 -
2.8.3 Gauss elimination algorithm for Ax b
1st phase: Forward elimination for [ | ]A b
For 1,..., 1
1,...,
, 1,..., , 1,...,
, 1,...,
ik
i kk
ij ij i kj
i i i k
k n
a m i k n
a a a m a i k n j k n
b b m b i k n
Note: If 0kk
a , switch rows first, to make 0kk
a .
2nd phase: Back–substitution
1 , 1,...,1
n
n
nn n
k kj j j k
k
kk
bx
a
b a x
x k n a

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 28/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 28 -
2.8.4 Gauss elimination software
• Matlab>> A = [ 1 2; 3 4] ;>> b = [ 5; 6] ;>> x = A\ b
•
Mathematica A = {{1, 2}, {3, 4}};b = {{5}, {6}};x = Li near Sol ve[ A, b]
• Fortran, C
The web site www.netlib.org is a great repository of FORTRAN, C and C routines for numerical computation,
available free of charge. There is a taxonomy of the numerical computations performed by corresponding
routines at http://www.netlib.org/bib/gams.html. On that page you may click on D2a1 to go to a collection
of routines used for the Solution of systems of linear equations Ax b corresponding to General matrices
A. Scroll to the bottom of the page and go to Results Page 3. On that page click on toms/576, which takes you
to the desired final page, namely http://netlib3.cs.utk.edu/toms/576. This page contains
a. 10 main programs that can be used to test the subsequent subroutines;
b. The subroutines
- MODGE: Solves Ax b for general matrices A, using Gaussian elimination.
- OUTPT1: Shows the solution
solx of Ax b .
- RESID1: Shows the residualssol
Ax b .
- REFINE: Performs iterative refinement of the solutionsol
x of Ax b .
- OUTPT2: Shows the iteratively refined solutionref
x of Ax b .
- RESID2: Shows the residuals
ref Ax b .
c. Data for tests 1 and 4.
You may cut and paste the entire text into a text file. The Gaussian elimination solver is contained between the
lines
SUBROUTI NE MODGE( N, NDI M, A, B, EPS, TOLER, P, Q, Z, MOD 10
and
99995 FORMAT ( E18. 7)END
To test the above solver you may use the main program in Test 2, which does not require and external
data. After you have compiled and run this test program, you are ready to solve your linear system of
equations.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 29/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 29 -
• Excel: Use Solver
EXAMPLE 25 – SOLUTION OF LINEAR EQUATIONS AS MINIMIZATION OF A Q UADRATIC FUNCTION
EXAMPLE 22 in Excel.
B C D E F G H
2 A x b Ax Ax-b
3 1 1 3 1.00034436147488 5 =MMULT(B3:D3,E$3:E$5) =G3-F3
4 2 3 4 0.999839433693534 9 =MMULT(B4:D4,E$3:E$5) =G4-F4
5 5 7 9 0.999935570349651 21 =MMULT(B5:D5,E$3:E$5) =G5-F5
6 SSE = =SUMSQ(H3:H5)
B C D E F G H
2 A x b Ax Ax-b
3 1 1 3 1.0003 5 1 1
4 2 3 4 0.9998 9 2 3
5 5 7 9 0.9999 21 5 7
6

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 30/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 30 -
2.8.5 Time requirements for Gauss elimination
# of the required divisions and multiplications:
1st phase (Forward elimination)
For 1, ..., 1k n we need
n k divisions fori
m
2( )n k multiplications forij
a
n k multiplications fori
b
Given that1
1
( 1)
2
n
k
n n k
and
12
1
( 1) (2 1)
6
n
k
n n n k
we get that total # for phase 1 is
2( 1) ( 1)
3 2
n n n n
2nd phase (Back-substitution)
For eachk
x we needmultiplications
1 division
n k
, i.e.( 1)
2
n n total.
Thus, grand total is
32
3 3
n n n (34)
If n is large, the total number of operations is
3( )O n (35)
For 100n in eqn. (34) we get 343,300 multiplications.
By comparison, Cramer’s method (HWNTHI: What is Cramer's method?) requires
( 1)! 2
n
n n n
e
(36)
(HWNTHI: Search Stirling formula.)
For 100n in eqn. (36) we get
100
15810025.1 10
2.718282
multiplications
If a fast PC can do 109 floating-point operations per second (FLOPS) how long would it take to solve a
linear system of 100 equations using each approach?

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 31/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 31 -
HWNTHI: Solve
1
2
3
4
1 2 3 4 10
5 6 7 8 26
9 10 11 12 42
x
x
x
x
1
2
3
4
1 2 3 4 10
5 6 7 8 26
9 10 11 12 41
x
x
x
x

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 32/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 32 -
2.8.6 Gauss elimination for equations with unknowns
11 1 1 1
21 1 2 2
1 1
...
...
.
.
.
.
...
n n
n n
m mn n m
a x a x b
a x a x b
a x a x b
(37)
Apply Gauss elimination to bring [ | ]A b to row echelon (upper triangular) form and determine
whether eqn. (37) has
a)
No solution
b)
Infinite solutions
c) Unique solution
Visually:
m n

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 33/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 33 -
Using equations:
-
Initially we have three cases:
Case 1:1
0, 1, ..., j
a j n and1
0b . Then1
0 0b , contradiction no solution, STOP.
Case 2:1
0, 1, ..., j
a j n and1
0b . Then1
0 0b . Interchange this equation with the last one
and examine again the 3 cases.
Case 3:1
0 j
a for a certain j . Then interchange columns so that1 j
a comes in the first column.
- Do forward elimination for the column of1 j
a .
- Examine the above 3 cases for the ( 1) ( 1)m n subsystem.
By repeating the previous procedure we result in one of the following:
a) encounter an unsolvable equation (nonzero = 0)
b) transform eqn. (37) to
1 2
2
(1) (1) (1) (1) (1)
11 12 1 1 1
(2) (2) (2) (2)21 2 2 2
( ) ( ) ( )
... ...
... ...
...
...
0 0
...
0 0
r n
r n
r n
j j r j n j
j r j n j
r r r
rr j rn j r
a x a x a x a x b
a x a x a x br
a x a x b
m r
r n
(38)
Because r n , eqn. (38) is indeterminate.
c) Eqn. (38) has r n . Then, there exists a unique solution.
EXAMPLE 26 – HWNTHI
Ax b Ax c
1 2 3 0
4 5 6 3
7 8 9 0
A b
(No solution)
0 2 1
3 1 2
6 0 1
d
c x
(Infinite solutions)
-
Verify with Mathematica:LinearSolve[{{1,2,3}, {4,5,6}, {7,8,9}}, {0,3,0}] yields LinearSolve[{{1,2,3}, {4,5,6}, {7,8,9}}, {0,3,0}]
Solve[{{1,2,3}, {4,5,6}, {7,8,9}}. {x1, x2, x3} == {0,3,0},{x3, x2, x1}] yields {}
LinearSolve[{{1,2,3}, {4,5,6}, {7,8,9}}, {0,3,6}] yields {2, −1,0}
Solve[{{1,2,3}, {4,5,6}, {7,8,9}}. {x1, x2, x3} == {0,3,6},{x3, x2, x1}] yields
{{x2 → −1 − 2x3, x1 → 2 + x3}}

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 34/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 34 -
2.8.7 LU decomposition
• What :
Theorem 1 – LU decomposition of matrix A
A LU (39)
• Why : Solve series of systems of equations with same matrix A , particularly when A is sparse (e.g.
tridiagonal).
( )
fixed
i A x b , 1,2, 3,...i
•
How to use LU:
easy to solve for (Why?) Then...
easy to solve for (Why?)
Ld b dAx b L Ux b
Ux d xd
• How to find matrices ,L U : Gauss elimination!
* * *
* * * *
* * * *
* * *
0 * *
0 * * *
* * *
0 * *
0 0 *
U
1 0 0
* 1 0
* * 1
L
A
L
U

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 35/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 35 -

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 36/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 36 -
EXAMPLE 27 – LU DECOMPOSITION
1 1 3
2 3 4 2
5 7 9 5
1 1 3
0 1 2
0 2 6 2
1 1 3
0 1 2
0 0 2
1 1 3 1 0 0
0 1 2 , 2 1 0
0 0 2 5 2 1
U L
HWNTHI: Check that LU A . Solve Ax b by solving Ld b , then Ux d .

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 37/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 37 -
- More formally:
Definition 2 – Elementary row operations (ERO)
row row
row row ( 0)
row row row
i j
i i
j j i
c c
c
Definition 3 – Elementary column operations (ECO)
column column
column column ( 0)
column column column
i j
i i
j j i
c c
c
Definition 4 – Elementary matrix
A matrix resulting from performing an ERO (ECO) on the identity matrix.
EXAMPLE 28 – ELEMENTARY MATRICES
1 2
0 1 0
row row : 1 0 0
0 0 1
2 2
1 0 0
row 2 row : 0 2 0
0 0 1
2 2 1
1 0 0
row row 2 row : 2 1 0
0 0 1
Similar matrices for columns.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 38/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 38 -
Theorem 2 – Inverse of elementary matrix
The inverse of every elementary matrix is also an elementary matrix.
EXAMPLE 29 – ELEMENTARY MATRIX INVERSE
1
1 0 0 1 0 02 1 0 2 1 0
0 0 1 0 0 1
1
0 1 0 0 1 0
1 0 0 1 0 0
0 0 1 0 0 1
1
1 0 0 1 0 0
0 1 / 2 0 0 2 00 0 1 0 0 1

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 39/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 39 -
Theorem 3 – Elementary row (column) operations through elementary matrices
The result of each ERO (ECO) on a matrix A can be represented as the product EA ( AE ), where E is
an elementary matrix.
EXAMPLE 30 – ELEMENTARY MATRICES
1 2
1
0 1 0 1 1 3 2 3 4
row row : 1 0 0 2 3 4 1 1 3
0 0 1 5 7 9 5 7 9
A A
2 2
1
1 0 0 1 1 3 1 1 3
row 2 row : 0 2 0 2 3 4 4 6 8
0 0 1 5 7 9 5 7 9
A A
2 2 1
1
1 0 0 1 1 3 1 1 3
row row 2 row : 2 1 0 2 3 4 4 5 10
0 0 1 5 7 9 5 7 9
A A
Similar idea for ECO (multiplication from the right).

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 40/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 40 -
EXAMPLE 31 – LU DECOMPOSITION USING ELEMENTARY MATRICES
For A as in EXAMPLE 26:
1
1 1
1 0 0 1 1 3 1 1 3 1 1 3 1 0 0 1 1 3
2 1 0 2 3 4 0 1 2 2 3 4 2 1 0 0 1 2
5 0 1 5 7 9 0 2 6 5 7 9 5 0 1 0 2 6
1 0 0
0 1 0
0 2 1
E A E
12 2
1 1 3 1 1 3 1 1 3 1 0 0 1 1 3
0 1 2 0 1 2 0 1 2 0 1 0 0 1 2
0 2 6 0 0 2 0 2 6 0 2 1 0 0 2
E E
1 1
1 2
1 1 3 1 0 0 1 0 0 1 1 3 1 0 0 1 1 3
2 3 4 2 1 0 0 1 0 0 1 2 2 1 0 0 1 2
5 7 9 5 0 1 0 2 1 0 0 2 5 2 1 0 0 2
A L UE E

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 41/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 41 -
Note: If pivoting (row and/or column exchange) is used to reduce A to upper triangular form, eqn.
(39) becomes
PAQ LU (40)
where ,P Q are corresponding row and column permutation (elementary) matrices, respectively.
(Why?)
EXAMPLE 32 – LU DECOMPOSITION WITH PIVOTING USING ELEMENTARY MATRICES
For
0 1 3
2 3 4
5 7 9
A :
1 1
0 1 0 0 1 3 2 3 4 0 1 3 0 1 0 2 3 4
1 0 0 2 3 4 0 1 3 2 3 4 1 0 0 0 1 30 0 1 5 7 9 5 7 9 5 7 9 0 0 1 5 7 9
P A A A P A
1
1 1 1 1
1 0 0 2 3 4 2 3 4 2 3 4 1 0 0 2 3 4
0 1 0 0 1 3 0 1 3 0 1 3 0 1 0 0 1 3
5 / 2 0 1 5 7 9 0 1 / 2 1 5 7 9 5 / 2 0 1 0 1 / 2 1
E A A E
12 2
1 0 0 2 3 4 2 3 4 2 3 4 1 0 0 2 3 4
0 1 0 0 1 3 0 1 3 0 1 3 0 1 0 0 1 3
0 1 / 2 1 0 1 / 2 1 0 0 1 / 2 0 1 / 2 1 0 1 / 2 1 0 0 1 / 2
E E
1 1
1 2
0 1 3 0 1 0 1 0 0 1 0 0 2 3 4
2 3 4 1 0 0 0 1 0 0 1 0 0 1 35 7 9 0 0 1 5 / 2 0 1 0 1 / 2 1 0 0 1 / 2
0 1 0
1 0 0
0 0 1
A P E E
1 0 0 2 3 4
0 1 0 0 1 3
5 / 2 1 / 2 1 0 0 1 / 2
P L U

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 42/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 42 -
2.8.8 Computation of the inverse of a matrix
EXAMPLE 33 – MATRIX INVERSE
1 2 3
1
3 1 1 1 0 0
1 2 1 0 1 01 1 1 0 0 1
x x x
A IX A
1
2
3
3 1 1 1
1 2 1 0
1 1 1 0
3 1 1 0
1 2 1 1
1 1 1 0
3 1 1 0
1 2 1 0
1 1 1 1
x
x
x

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 43/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 43 -
Use Gauss elimination three times OR once (simultaneously) for
F.E.
13
13
F.E.
25
B.S.
11 12
21
31
1
3 1 1 1 0 0
1 2 1 0 1 0
1 1 1 0 0 1
3 1 1 1 0 0
5 4 10 1 03 3 3
2 4 10 0 13 3 3
3 1 1 1 0 0
5 4 10 1 03 3 3
4 1 20 0 15 5 5
1 / 4
0 ,
1 / 4
x x
x x
x
x
13
22 23
32 33
2 3
1 / 2 3 / 4
1 , 1
1 / 2 5 / 4
x
x
x x
x x
Thus
1
1 1 34 2 40 1 1
1 1 54 2 4
A

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 44/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 44 -
General algorithm for AX I .
1 2
1
01 1
11 1
0
0
12 2
02
2 20
0
0
1
1 0
.... 0 0
0 1
[ ]{ } { }
[ ]{ } { }
[ ]{ } { }
n
n n
n
n n
A x e
A x e
A x e
A x x x
Ax eA x
Ax eA x
Ax eA x
Solve by Gauss elimination (LU decomposition)
1 2 1 2[ | ],[ | ],...,[ | ] [ | ... ]
n n A e A e A e A e e e
Even though in exact arithmetic Ax b and 1x A b are equivalent, x is hardly ever computed as
1x A b . Rather, x is computed as the solution of Ax b by whatever method is most
appropriate for a given A . (Gaussian elimination, iterative methods, optimization-based methods…)
Hence the Matlab command x = A\ b.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 45/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 45 -
EXAMPLE 34 – MATRIX INVERSE VS. LU DECOMPOSITION
1. 0. 0. 0. 0. 4. 1. 0. 0. 0.
0.25 1. 0. 0. 0. 0. 3.75 1. 0. 0.
0. 0.2667 1. 0. 0. 0.
0. 0. 0.2679 1. 0.0. 0. 0. 0.2679 1
4 1
1 4 1
1 4 1
1 4 11 4 .
A L
0. 3.733 1. 0.
0. 0. 0. 3.732 1.0. 0. 0. 0. 3.732
U
0.2679 0.07179 0.01923 0.005128 0.001282
0.07179 0.2871 0.07692 0.02051 0.005128
0.01923 0.07692 0.2884 0.07692 0.01923
0.005128 0.02051 0.07692 0.2871 0.07179
0.001282 0.005128 0.01923 0.07179 0.2679
1
A
• Find x that sastisfies Ax b by solving LUx b or as1x A b ?

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 46/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 46 -
2.8.9 Computation of the determinant of a matrix
• Why?
− Value of determinant rarely needed
−
Useful for theoretical considerations and derivation of general results
HWNTHI: Review properties of determinants in the textbook: det( ) 1I , det( ) det( )T A A ,
1det( ) 1/ det( ) A A , det( ) det( )det( )AB A B , det( ) det( )n c c A A
HWNTHI: Review matrix inversion theorem:1 adj( )
det( )
AA
A.
•
Computation of det( )A
forward elimination forward elimination...
pivoting pivoting A U
Then
1
det( ) ( 1) det( ) ( 1)n
r r
ii i
u
A U
where r is # of row or column interchanges.
EXAMPLE 35 – DETERMINANT OF A MATRIX VIA GAUSS ELIMINATION
13
13
25
3 1 1
1 2 1
1 1 1
3 1 1
5 403 3
2 403 3
3 1 1
5 403 3
40 05
U
Thus

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 47/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 47 -
0 5 4det ( 1) (3) 4
3 5
A

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 48/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 48 -
2.8.10 Numerical precision and pivoting
Pivoting = Interchanging of columns or rows during Gauss elimination.
• Why pivoting?
EXAMPLE 36 – SENSITIVITY OF SINGLE LINEAR EQUATION TO PARAMETER ERRORS
2 10 5x x , 2 10.1 5.05x x
% error = ______________
EXAMPLE 37 – SENSITIVITY OF MULTIPLE LINEAR EQUATIONS TO PARAMETER ERRORS
1 20.0003 1.566 1.569x x (41)
1 20.3454 2.436 1.018x x (42)
Fi gur e 6 – Gr aphi cal r epr esent ati on of eqns. ( 41) and ( 42) .
- Infinite precision 1 2
10, 1x x
- Matlab by default reports numbers with four significant digits.
Using 4-significant-digit arithmetic
2
0.34541151
0.0003000m (43)
(41)2 1 2
0.3454 1802 1806m x x (44)
(42) – (44)2 2
1804 1805 1.001x x (45)

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 49/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 49 -
(41) and (45)1 1 1
1.569 1.5680.0003 (1.566)(1.001) 1.569 3.333
0.0003000x x x
% error = ______________
In matrix form:
0.0003000 1.566 1.569 0.0003000 1.566 1.569
0.3454 2.436 1.018 0 1804 1805
0.0003000 0 0.001000 1.000 0 3.333
0 1 1.001 0 1.000 1.001
(46)
•
What went wrong?
• How could it be fixed?
-
Source of inaccuracy in EXAMPLE 36:
11 21| | | |a a
- A brute-force fix: Increase precision of arithmetic to 8 digits.
2
0.345400001151.3333
0.00030000000II m (47)
(41)2 1 2
0.34540000 1803.0879 1806.5419II m x x (48)
(42)–(48)2 2
1805.5239 1805.5239 1.0000000x x (49)
(41) and (49) 10.00030000000 1.5660000 1.0000000 1.5690000x
1 1
1.5690000 1.566000010.000000
0.00030000000x x
% error = ______________
In matrix form:
0.00030000000 1.5660000 1.5690000 0.00030000000 1.5660000 1.5690000
0.34540000 2.4360000 1.0180000 0 1805.5239 1805.5239
0.00030000000 0 0.0030000000 1.0000000 0 1
0 1.0000000 1.0000000
0.000000
0 1.0000000 1.0000000
(50)

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 50/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 50 -
- A smart fix: Interchange rows (pivoting): Solve eqns.(42), (41) rather than (41), (42), using same
precision.
4-significant-digit arithmetic
'
2
0.00030000.0008686
0.3454m (51)
(41) – (42) '
2 2 2 11.568 1.568 1.000 10.01m x x x (52)
Solution is accurate!
0.3454 2.436 1.018 0.3454 2.436 1.018
0.0003000 1.566 1.569 0 1.568 1.568
0.3454 0 3.454 1.000 0 10.00
0 1.000 1.000 0 1.000 1.000
(53)
HWNTHI: Spot the differences among the above three different solutions of eqns. (41) and (42).
EXAMPLE 38 – ROW PIVOTING
ForwardElimination
12
ForwardElimination
23
Back-subst
0 1 2 1
1 1 1 0
2 1 0 5
2 1 0 5
1 1 1 0
0 0 1 2 1
2 1 0 5
30 3 / 2 1 5 / 2 (No pivoting since 1)2
0 1 2 1
2 1 0 5
0 3 / 2 1 5 / 2
0 0 4 / 3 8 / 3
itution
3 2 12, 3, 1x x x

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 51/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 51 -
General computation rule:
- Compute all intermediate results with highest precision
- Report final results with sensible precision
HWNTHI: Many universities report course grades as A, B, C,… and GPA as, say, 3.763. Anything wrongwith that?

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 52/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 52 -
2.8.11 Numerical precision and matrix conditioning
EXAMPLE 39 – SENSITIVITY OF VARIOUS LINEAR SYSTEMS OF EQUATIONS
2
!
2
121 =+− x x
2 x
1 x
12
121 =+− x x
2
20
4
4
6
6
8
8
2221
=+− x x
182321
=+ x x
( )3,4
2 x
1 x
22 21 =+− x x
2 x
1 x
12
121 =+− x x
12
121 =+− x x
2 x
1 x
1.15
3.221 =+− x x
• How to assess quantitatively?
• Given that det( ) 0 A Ax b does not have unique solution, does det( ) 0A imply the
solution of Ax b is very sensitive to small errors in ,A b ?

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 53/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 53 -
Definition 5 – Vector norm in n
The norm of the vector n x is a real-valued function : n , such that
a) 0 for all n x x
b)
0 x x 0 (What is the difference between 0 and 0 ?)
c) , for any , n x x x
d)
, for any ,n n x y x y x y (Triangle inequality)
- Why use vector norms?
Theorem 4– Vector norms in n
General formula for p-norm in n :
1/
1
pn p
i pi
x
x (54)
where 1p
- Various possibilities
1-norm:1
1
n
i i
x
x (55)
- Matlab: norm( x, 1)
Euclidean norm or inner-product norm or 2-norm
1
22
21
n T
i i
x
x x x (56)
- Matlab (default vector norm): norm( x, 2)
Infinity-norm max
1,... i x
i n
x (57)
- Matlab: nor m( x, I nf )
EXAMPLE 40 – VECTOR NORMS
1 2
37, 5, 4
4
v v v v

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 54/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 54 -
Definition 6 – Matrix norm
The norm of the matrix n n A is a real-valued function : n n , such that
a) 0 for all n n A A
b)
0 A A O (What is the difference between 0 and O ?)
c) , for any , n n A A A
d) , for any ,n n n n A B A B A B (Triangle inequality)
e)
, for any ,n n n n AB A B A B
- Why use matrix norms?
Theorem 5 – Induced matrix norms in n n
General formula for induced p -norm in n n :
max,
p
ip n
p
AxA
xx x 0 for 1p (58)
Above formula not immediately useful. However, the following explicit formulas can be shown:
Theorem 6 – Formulas for induced matrix norms in n n
1-norm (maximum column sum):1
1
max
1
n
ij i i
a
j n
A (59)
- Matlab: norm( A, 1)
Euclidean or 2-norm1/2
max2( )T
i
A A A (60)
- Matlab (default matrix norm): norm( A, 2) , norm( A)
Infinity-norm (maximum row sum)1
max1
n
ij i j
a i n
A (61)
- Matlab: nor m( A, I nf )

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 55/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 55 -
Theorem 7 – Frobenius matrix norm in n n (NOT an induced norm5)
1/2
2
1 1
n n
ij F i j
a
A
- Matlab: nor m( A, ' f r o' )
EXAMPLE 41 – MATRIX NORMS
2 2 4
0 5 3
2 1 2
A
1
2
_____________________ 9
_____________________ 5.881_____________________ 8
_____________________ 67
i
i
i
F
A
AA
A
5 Chellaboina, V. and Haddad, W.M., 1995. Is the Frobenius matrix norm induced? Automatic Control, IEEE Transactions on,
40(12): 2137-2139.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 56/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 56 -
2.8.12 Matrix condition number
Definition 7 – Condition number
1cond( ) ˆi i
A A A (62)
- It can be shown (how?) that
cond( ) 1A (63)
Proof: Eqn. (62) and property e) in Definition 6 – Matrix norm …
• cond( )A usually estimated without computing 1A .
- What is it good for?
EXAMPLE 42 – CONDITION NUMBER OF MATRIX FROM LINEAR SYSTEM OF EQUATIONS
1 41 11 100 11
cond( ) 109 100 9 1
A A A
Condition number for above matrix is "large".
EXAMPLE 43 – CONDITION NUMBER OF MATRIX IN EXAMPLE 36
1 4.498 2.89180.0003 1.560.63778 0.0005
6 cond( ) 160.3454 2.436 539
A A A
Condition number for above matrix is "large".
- How large is "large"?

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 57/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 57 -
Theorem 8 – Sensitivity of linear system of equations to matrix errors
Let the following two linear systems of equations have unique solutions:
( )( )
Ax b
A A x x b
Then
cond( )
x AA
x x A (64)
If, in addition, A is small enough that1 1 A A , then
cond( )
1 cond( )
AA
x A
x AAA
(65)
Theorem 9 – Sensitivity of linear system of equations to right-hand side vector errors
Let the following two linear systems of equations have unique solutions:
( )
Ax b
A x x b b
Then
cond( )
x b
Ax b
(66)
Large problems that can be solved (only) by computers are generally even more sensitive than small
ones.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 58/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 58 -
EXAMPLE 44 – SENSITIVITY OF SOLUTION OF SYSTEM OF LINEAR ALGEBRAIC EQNS
System of equations
1 2 1
1 2 2
11
9 100
x x b
x x b
Case I:
1 2 1 21, 9.1 0.1, 0.1b b x x
Case II:
1 2 1 21, 9 1, 0b b x x
Percent change of solution from Case I to Case II:_____________________________________
Confirm: From EXAMPLE 41
410
x A
x x A
410
x b
x b
- What does that mean?

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 59/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 59 -
EXAMPLE 45 – THE HILBERT MATRIX
Appears in approximation of functions by polynomials.
1 1 12 3
1 1 1 12 3 4 1
1 1 1 11 2 2 1
1
ˆ
n
n
n
n n n n
H
(
1
1ij h i j )
18
2020 cond( ) 10n H
Matlab code (M-file Hi l ber t Mat r i x. m):
% Const r uct 20x20 Hi l ber t mat r i x%f or i =1: 20f or j =1: 20
Hi l bert Mat r i x20( i , j ) =1/ ( i +j - 1) ;
end end% Const r uct ant i ci pat ed sol ut i on of syst em of equat i ons% Hi l ber t Mat r i x20 * vect or = bvect or = ones( 20, 1)% Const r uct bb = Hi l ber t Mat r i x20 * vect or ;% Sol ve Hi l ber t Mat r i x20 * x = bx = Hi l bert Mat r i x20\ b
Matlab results
vect or =1111111111111
1111111
x = 1. 00001. 00001. 00010. 99671. 05050. 58493. 0370
- 5. 269413. 1243
- 12. 97809. 1255
- 0. 42992. 2268
- 1. 40794. 1174
- 11. 760327. 0189
- 23. 882612. 6007- 1. 1547

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 60/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 60 -
Mathematica code:
n=20;
H=HilbertMatrix[n]; MatrixForm[H]
⎣
11
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
1
10
1
11
1
12
1
13
1
14
1
15
1
16
1
17
1
18
1
19
1
201
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
1
10
1
11
1
12
1
13
1
14
1
15
1
16
1
17
1
18
1
19
1
20
1
211
3
1
4
1
5
1
6
1
7
1
8
1
9
1
10
1
11
1
12
1
13
1
14
1
15
1
16
1
17
1
18
1
19
1
20
1
21
1
221
4
1
5
1
6
1
7
1
8
1
9
1
10
1
11
1
12
1
13
1
14
1
15
1
16
1
17
1
18
1
19
1
20
1
21
1
22
1
231
5
1
6
1
7
1
8
1
9
1
10
1
11
1
12
1
13
1
14
1
15
1
16
1
17
1
18
1
19
1
20
1
21
1
22
1
23
1
241
6
1
7
1
8
1
9
1
10
1
11
1
12
1
13
1
14
1
15
1
16
1
17
1
18
1
19
1
20
1
21
1
22
1
23
1
24
1
25
17
18
19
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
1
8
1
9
1
10
1
11
1
12
1
13
1
14
1
15
1
16
1
17
1
18
1
19
1
20
1
21
1
22
1
23
1
24
1
25
1
26
1
271
9
1
10
1
11
1
12
1
13
1
14
1
15
1
16
1
17
1
18
1
19
1
20
1
21
1
22
1
23
1
24
1
25
1
26
1
27
1
281
10
1
11
1
12
1
13
1
14
1
15
1
16
1
17
1
18
1
19
1
20
1
21
1
22
1
23
1
24
1
25
1
26
1
27
1
28
1
291
11
1
12
1
13
1
14
1
15
1
16
1
17
1
18
1
19
1
20
1
21
1
22
1
23
1
24
1
25
1
26
1
27
1
28
1
29
1
30
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
1
13
1
14
1
15
1
16
1
17
1
18
1
19
1
20
1
21
1
22
1
23
1
24
1
25
1
26
1
27
1
28
1
29
1
30
1
31
1
321
14
1
15
1
16
1
17
1
18
1
19
1
20
1
21
1
22
1
23
1
24
1
25
1
26
1
27
1
28
1
29
1
30
1
31
1
32
1
331
15
1
16
1
17
1
18
1
19
1
20
1
21
1
22
1
23
1
24
1
25
1
26
1
27
1
28
1
29
1
30
1
31
1
32
1
33
1
341
16
1
17
1
18
1
19
1
20
1
21
1
22
1
23
1
24
1
25
1
26
1
27
1
28
1
29
1
30
1
31
1
32
1
33
1
34
1
351
17
1
18
1
19
1
20
1
21
1
22
1
23
1
24
1
25
1
26
1
27
1
28
1
29
1
30
1
31
1
32
1
33
1
34
1
35
1
361
18
1
19
1
20
1
21
1
22
1
23
1
24
1
25
1
26
1
27
1
28
1
29
1
30
1
31
1
32
1
33
1
34
1
35
1
36
1
371
19
1
20
1
21
1
22
1
23
1
24
1
25
1
26
1
27
1
28
1
29
1
30
1
31
1
32
1
33
1
34
1
35
1
36
1
37
1
381
20
1
21
1
22
1
23
1
24
1
25
1
26
1
27
1
28
1
29
1
30
1
31
1
32
1
33
1
34
1
35
1
36
1
37
1
38
1
39⎦

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 61/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 61 -
xOnes=Table[{1},{i,1,n}]; MatrixForm[xOnes]
⎣
⎦

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 62/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 62 -
b=H.xOnes; MatrixForm[b]
⎡ 55835135
1551950413684885
517316811333445
5173168678544345
356948592604180055
35694859213676707007
892371480012532641007
8923714800104294993063
8031343320097124150813
803134332002638126077577
23290895628002482853440057
232908956280072733748345767
72201776446800137946478311659
144403552893600131214377943659
14440355289360017878143110237
20629078984800119645914042379
144403552893600114631901789129
1444035528936004071493833381773
5342931457063200
391526776738577353429314570632003771059091081773
5342931457063200
⎤

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 63/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 63 -
x=LinearSolve[H,b]; MatrixForm[x]
⎣
1
1
111
11
11
111
11
1
111
1
1⎦

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 64/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 64 -
However:
n=20;
H=HilbertMatrix[n]//N; MatrixForm[H]
. . …
. . …. . …
. . …. . …
. . …. . …
. . …… … …
xOnes=Table[{1},{i,1,n}]; MatrixForm[xOnes]

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 65/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 65 -
b=H.xOnes; MatrixForm[b]
⎡ .
. . . .
. . . . . .
. . . .
.
. . . .
⎤
x=LinearSolve[H,b]; MatrixForm[x]
0.9999987102450404
1.0001984795168208
0.9925277635763163
1.11906409458715260.019414296716930644
5.4869056040266075−9.96710090253764310.156508406219984
20.683788328136238−55.15764016238065
36.6485198453427732.297361263125126−32.37348992021546
−20.942601206391025
3.286112567151407
56.4580572645654
−19.249110098461458−46.6230260964306845.64478439335456
−10.48027353766982
Li near Sol ve: : l uc: Resul t f or _ Li near Sol ve _ of badl y condi t i oned mat r i x
_ {{1. , 0. 5, 0. 333333, 0. 25, 0. 2, 0. 166667, 0. 142857, 0. 125, 0. 111111, 0. 1, 0. 0909091, 0. 0833333, 0. 0769231, 0. 0714286, 0. 0666667, 0. 0625, 0. 0588235, 0. 05555
56, 0. 0526316, 0. 05}, � 18� , {� 1� }} _ may cont ai n si gni f i cant numer i cal
err ors. �

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 66/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 66 -
2.9 Matrix rank
• Why?
- Reaction network problems
- Dimensional analysis problems
- Approximation problems (cf. singular value decomposition)
2.9.1 Linear independence
Definition 8 – Linear independence of vectors in n
The vectors1,...,
k v v in n are linearly independent iff
1 1 1... ... 0
k k k c c c c v v 0 (67)
EXAMPLE 46 – LINEARLY INDEPENDENT VECTORS
1 2 3
1
1 1 2 2 3 3 1 2 3 2
3
1 2 3
4 , 5 , 6
7 8 10
1 2 3 1 2 3 0
4 5 6 4 5 6 0
7 8 10 7 8 10 0
c
c c c c c c c
c
v v v
v v v
1
2
3
3 2 1
1 2 3
1 2 3 0
... 0 3 6 0
0 0 1 0
c 0
, , are linearly independent
c
c
c
c c
v v v
EXAMPLE 47 – LINEARLY DEPENDENT VECTORS
1
1 2 3 1 1 2 2 3 3 1 2 3 2
3
1 2 3 1 2 3 1 2 3 0
4 , 5 , 6 4 5 6 4 5 6 0
7 8 9 7 8 9 7 8 9 0
c
c c c c c c c
c
v v v v v v
1
2
3
3 2 1
1 2 3 1 2 3
1 2 3 0... 0 3 6 0
0 0 0 0
(anything), c 2 ,
, , are linearly dependent, i.e. 2
c
c
c
c t t c t
t t t
v v v v v v 0
Each one of1 2 3, ,v v v is a linear combination of the other two.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 67/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 67 -
EXAMPLE 48 – LINEARLY DEPENDENT VECTORS
1
1 2 3 1 1 2 2 3 3 1 2 3 2
3
1 2 3 1 2 3 1 2 3 0
2 , 4 , 6 2 4 6 2 4 6 0
3 6 9 3 6 9 3 6 9 0
c
c c c c c c c
c
v v v v v v
1
2
3
3 2 1
1 2 3 1 2 3
1 2 3 0... 0 0 0 0
0 0 0 0
(anything), c (anything), 2 3
, , are linearly dependent, i.e. ( 2 3 )
c
c
c
c p q c q p
q p q p
v v v v v v 0
Pick one of1 2 3, ,v v v , then determine the remaining two.
• Given1,...,
k v v in n , how many are linearly independent?
EXAMPLE 49 – SOLUTION OF HOMOGENEOUS SYSTEM OF LINEAR ALGEBRAIC EQUATIONS
1
2
3
3 2 1
1
2
3
1
2
3
1 2 3 0
2 4 6 0 ...
3 6 9 0
(anything), c (anything), 2 3
2 3 3 2
0 1
1 0
c
c
c
c p q c q p
c q p
c q p q
c p
c
c
c
3 2
span 0 , 1
1 0
Theorem 10 – Null space of a matrix
Solutions of homogeneous systems of linear algebraic equations form a vector space, called the null
space of A with corresponding basis vectors.
HWNTHI: What is a vector space and a vector space basis? (Hint: A set, closed under vector additionand scalar multiplication.)

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 68/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 68 -
2.9.2 Basic facts about matrix rank
Definition 9 – Matrix rank (column)
For matrix A inm n
(column) rank( ) maximum number of LI column vectors ofA A (68)
Definition 10 – Matrix rank (row)
For matrix A inm n
(row) rank( ) maximum number of LI row vectors ofA A (69)
Theorem 11 – Matrix rank
For matrix A in m n
(row) rank( ) (column) rank( )A A (70)
•
rank( )A determined through forward elimination (row reduction of A )Theorem 12 – Matrix rank through Gauss elimination
For matrix A in m n
rank( ) Number of non-zero rows in row-reduced form ofA A (71)
Theorem 13 – Sub-additivity of rank
For matrices A in m n , B in n k
rank( ) rank( ) rank( ) A B A B (72)
Theorem 14 – Sylvester inequality
For matrices A in m n , B in n k
rank( ) rank( ) rank( ) min{rank( ), rank( )}n A B AB A B (73)
Definition 11 –Matrix nullity
For matrix A in m n
nullity( ) rank( )n A A (74)
A m
n
rank( )A
A
m
n
rank( )A

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 69/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 69 -
2.9.3 Matrix rank and solution of systems of linear equations
Theorem 15 – Consistency of linear system of equations
Ax b ( A in m n , b in m ) is consistent iff
rank([ | ]) rank( )A b A (75)
Sketch of Proof:
rank([ | ]) rank( )A b A
rank([ | ]) rank( )A b A
A b
m
n
rank([ | ]) rank( )A b A
A b
rank([ | ]) rank( )A b A
rank([ | ]) rank( )A b A
m rank([ | ]) rank( )A b A
n

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 70/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 70 -
Theorem 16 – Uniqueness of solution of linear system of equations
Ax b (A in m n , b in m ) has unique solution iff
rank([ | ]) rank( ) n A b A (76)
Sketch of Proof:
rank( ) n A
rank([ | ]) rank( ) n A b A A b
m
n
A b m
rank( ) n A n
rank([ | ]) rank( ) n A b A

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 71/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 71 -
EXAMPLE 50 – INDEPENDENT REACTIONS IN OXIDATION OF ETHYLENE
Partial and total oxidation of ethylene:
2 4 2 2 4
2 4 2 2 2
2 4 2 2 2
1C H O C H O
25
C H O O 2CO 2H O2C H 3O 2CO 2H O
• How many and which of the above reactions are independent?
Write reactions as equations:
2 4 2 4 2 2 2
2 4 2 4 2 2 2
2 4 2 4 2 2 2
11C H 1C H O O 0CO 0H O 0
25
0C H C H O O 2CO 2H O 02
1C H 0C H O+3O 2CO 2H O 0
or
2 4
12 42
522
2
2
C H
C H O1 1 0 0 0
O0 1 2 2 0
CO1 0 3 2 2 0
H O
A
Are the rows of A linearly independent? If linearly dependent, how?
Let
1
1 25
2 2
3
1 1 0 00 1 2 2ˆ
1 0 3 2 2
T
T
T
vv
v
A
Then, to check linear independence, solve
1 1 2 2 3 3
1 1
1 5
2 2 2 2
3 3
1 0 1 0 1 0 1 0
1 1 0 0 0 1 1 0
3 0 0 0 0 0...
0 2 2 0 0 0 0 0
0 2 2 0 0 0 0 0
c c c
c c
c c
c c
v v v 0
3
2
1
(anything)c p
c p
c p
or
1 2 3 v v v 0
Two reactions are independent; the third depends on the other two.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 72/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 72 -
EXAMPLE 51 – DIMENSIONAL ANALYSIS FOR PRESSURE DROP IN A PIPE
Physical (dimensional) variables associated with fluid flow in a pipe:
pressure drop per unit length in a pipe
pipe diameter
mean velocity of fluid in pipefluid density
viscosity
p
D
v
Dimensions of above variables ( M mass, L length, T time):
2 2
1
3
1 1
[ ]
[ ]
[ ]
[ ]
[ ]
p ML T
D L
v LT
ML
ML T
(Unknown) relationship among above variables
( , , , , ) 0 f p D v
• Construct dimensionless variables1 2, , ... such that
1 2( , ,...) 0 f
Let
1 2 3 4 5
1 1 1 2 3 3 4 4 5 5 5
1 4 5 1 2 3 4 5 1 3 5
2 2 3
2 3 2
[ ] [ ]
[ ] ( )( )( )( )( )
a a a a a
a a a a a a a a a a a
a a a a a a a a a a a
p D v
M L T L L T M L M L T
M L T
Because is dimensionless
1
21 4 5
31 2 3 4 5
41 3 5
5
0 1 0 0 1 1 0
2 3 0 2 1 1 3 1 0
2 0 2 0 1 0 1 0
a
a a a a
a a a a a a
a a a a
a
1 0 0 1 1 0 1 0 0 1 1 0
2 1 1 3 1 0 0 1 1 1 1 0
2 0 1 0 1 0 0 0 1 2 1 0
nullity( ) rank( ) 5 3 2n A A

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 73/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 73 -
There are two basis vectors for the solution space:
1
2
3
4
5
1 1
2 2 1
2 1 2
0 11 0
a
a
a
a a
Therefore there are two dimensionless variables,1 2, , which can be defined in an infinite number of
ways, depending on the choice of two pairs ( , ) . E.g.,
1 2
1
1 1 2
2
( , ) (1,0)
( , ) (0,1)
p D v
p D v
or
1
1
1 1 2
2
( , ) ( 1, 1)
( , ) (0,1)
Dv
p D v
or
...
• 1
familiar?

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 74/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 74 -
3. EIGENVALUE/EIGENVECTOR PROBLEMS
3.1 Review
Given square matrix A , find scalar/vector pair ( , ) x , such that
Ax x (77)
iff det( ) 0 (Why?)( )
iff det( ) 0 (Why?)
x 0 I AAx x x Ax 0 I A x 0
x 0 I A
Definition 12 – Characteristic equation
det( ) 0 I A (78)
Theorem 17 – Characteristic (polynomial) equation
1 2
1 2 1
Characteristic polynomial
det( ) 0 ... 0n n n
n n
I A
(79)
Definition 13 – Eigenvalues (characteristic values)
Eigenvalues of A : Roots , 1, ...,i
i n of characteristic (polynomial) equation (79).
Definition 14 – Eigenvectors (characteristic vectors)
Eigenvectors of A : Non-zero solutions of( )( ) , 1,...,i
i i n I A x 0 .
•
How many distinct eigenvalues, eigenvectors?
HWNTHI: Prove or disprove: The eigenvalues of a triangular or a diagonal matrix are equal to its
diagonal elements.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 75/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 75 -
EXAMPLE 52 – EIGENVALUES AND EIGENVECTORS OF A MATRIX
1 2
3 4
A
Find eigenvalues:
2
1 2 1 0det det
3 4 0 1
1 2det
3 4
(1 )(4 ) (2)(3)
5 2 0
A I
1,2
5.372
0.372
Find eigenvector corresponding to1
:
1 1 1
2 2 2 normalized
1 5.372 2 0 1 0.4160
3 4 5.372 0 2.186 0.9094
v v v c
v v v
HWNTHI: Verify above result.
HWNTHI: Is1
Av v ?
Find eigenvector corresponding to2
:
1 1 1
2 2 2 normalized
1 0.372 2 0 1 0.8246
3 4 0.372 0 0.686 0.5658
w w w d
w w w
HWNTHI: Verify above result.
HWNTHI: Is2
Aw w ?

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 76/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 76 -
Fi gur e 7 – Gr aphi cal r epr esent ati on of ei genval ue/ ei genvect or pai r f or EXAMPLE 51. For al l
vect ors1 2
[ ]T x x x wi t h2
1x , r epr esent ed by poi nt s on t he ci r cl e, t he corr espondi ng
vect ors Ax ar e r epr esent ed by poi nt s on t he el l i pse. For t he choi ce of x on t he l ef t , t he
vect ors x and Ax ar e not al i gned. For t he choi ce of x on t he r i ght , t he vect or s x and
Ax are al i gned, i . e. Ax x , whi ch means t hat t hi s x i s an ei genvect or and acorr espondi ng ei genval ue.
2 x 1
2
2
x 2
2 2 4 x 1
x 2

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 77/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 77 -
EXAMPLE 53 – EIGENVALUES AND EIGENVECTORS OF A MATRIX
2 0 0
0 1 1
0 1 1
A
Find eigenvalues:
2 3
2 0 0 1 0 0
det det 0 1 1 0 1 0
0 1 1 0 0 1
2 0 0
det 0 1 1
0 1
4
1
04
A I
1,2,3
2
2
0
Find eigenvectors corresponding to1,2
:
1 1
2 2
3 3
3
2
1
0 0
0 0
0 0
0
0 0 0 0 1 1
0 1 1 0 1 1
0 1 1 0 0 0
1 1 0
1 1 0
0 0 0
1 1 0
0 0
0
0
0
0
v v
v v
v v
v
v
v
3 1
2 2 1 2
31
0
0 0
1 0
0 0 1
0 0 1
v v a
v v b a b a b
v bv
v v
Find eigenvectors corresponding to 3 :
1 1 1
2 2 2
3 3 3
2 0 0 0 2 0 0 0 0 0
0 1 1 0 0 1 1 0 1
0 1 1 0 0 0 0 0 1
v v v
v v v c c c
v v v c
v3
HWNTHI: Verify above results.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 78/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 78 -
EXAMPLE 54 – MATRIX A WITH REPEATED EIGENVALUES
1 2 3
0 1 4
0 0 1
A
Eigenvalues:
1 2 3 1
Eigenvector v :
1
2
3
0 2 3 0 1
0 0 4 0 0
0 0 0 0 0
v
v
v
A I v 0 v

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 79/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 79 -
Theorem 18 – Eigenvalues and determinant
1 2det( )
n A (80)
Quick Proof: Theorem 17
01 2
1 2 1Characteristic polynomial
det( ) ...
det( ) ( 1)
n n n
n n
n
n
I A
A
det( ) ( 1)n A1 2
(Why?)n
Theorem 19 – Eigenvalues and matrix invertibility
A square matrix is invertible iff all of its eigenvalues are non-zero.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 80/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 80 -
3.1.1 Solution of polynomial equations
Theorem 20 – Fundamental theorem of Algebra
The polynomial equation 1
0 1 1... 0n n
n n a x a x a x a
with , 0, ...,
i a i n has exactly n
roots in the complex plane.
• Polynomial equations can be solved relatively easily using specialized methods.
• Eigenvalues usually not computed as solutions of the characteristic equation, but through direct
numerical methods.
3.1.2 Software for polynomial equations
•
Matlab:>> hel p roots
•
Mathematica:RootsSol ve
•
Fortran, C
Check www.netlib.org
HWNTHI: Execute the following Mathematica commands, to check for the general solutions of
quadratic, cubic, quartic, and quintic polynomial equations.
Root s[ a*x 2̂ + b*x + c == 0, x]
Root s[ a*x 3̂ + b*x 2̂ + c*x + d == 0, x]Root s[ a*x 4̂ + b*x 3̂ + c*x 2̂ + d*x + e == 0, x]Root s[ a*x 5̂ + b*x 4̂ + c*x 3̂ + d*x 2̂ + e*x + f == 0, x]
3.1.3 Software for eigenvalues
•
Matlab:>> hel p ei g
• Mathematica:Ei genval ues
•
Fortran, C
Check www.netlib.org

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 81/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 81 -
3.2 Why eigenvalues and eigenvectors?
EXAMPLE 55 – DYNAMICS OF CSTR
A B
Liquid volume = V
Feed flowrate = F i Feed temperature = T i Feed concentration of A = C Ai
Effluent flowrate = F
Effluent temperature = T Effluent concentration of A = C A
Coolant
Fi gur e 8 – Cont i nuous st i r r ed- t ank react or ( CSTR)
CSTR dynamics around steady state:
11 12 1
21 22 2
( ) ( )
( ) ( )
( ) ( )
( ) ( )
A AdC a a C t f t
d dt t t dT dt
a a T t f t dt
t t d
dt
xAx f
A x f x
•
When is this CSTR stable?
• What is the dominant time constant of this CSTR?
EXAMPLE 56 – DYNAMICS OF CSTR IN DETAIL
Consider the exothermic reaction AB in a jacket-cooled CSTR (Figure 8). Assuming that the volume
V of the liquid in the reactor remains constant, the reactor can be modeled as
0
0
( )( ( )) exp ( )
( )
( )( ( )) exp ( ) ( ( ) ( ))
( )
A
Ai A A
t
i A c
p
dC F t E C C t k C t
dt V RT t
UAdT F t E T T t Jk C t T t T t
dt V RT t c V
(81)
where
• Manipulated inputs:1 2
( , ) ( , )c
u u F T
• Measured outputs:1 2
( , ) ( , )A
y y C T
• States:1 2
( , ) ( , )A
x x C T
In vector form
At

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 82/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 82 -
( )( ( ), ( ))
( ) ( ( ), ( ))
d t t t
dt t t t
xf x u
y h x u
(82)
where
1( ) ( )
( ) ˆ
( ) ( )
A
n
x t C t
t
x t T t
x ,
1( ) ( )
( ) ˆ
( ) ( )m c
u t F t
t
u t T t
u ,
1( ) ( )
( ) ˆ
( ) ( )
A
q
y t C t
t
y t T t
y (83)
1 1 1
1 1
( )
0 ( )
( )
0 ( )
( ( ),..., ( ), ( ),..., ( ))
( ( ), ( )) ˆ
( ( ),..., ( ), ( ),..., ( ))
( ( )) exp[ ] ( )
( ( )) exp[ ] ( ) ( ( ) ( ))t
p
n m
n n m
F t E
Ai A AV RT t
UAF t E
i A c V RT t c V
f x t x t u t u t
t t
f x t x t u t u t
C C t k C t
T T t Jk C t T t T t
f x u
(84)
1 1 1
1 1
( ( ), ..., ( ), ( ),..., ( )) ( )
( ( ), ( )) ˆ
( ( ), ..., ( ), ( ), ..., ( )) ( )
n m A
q n m
h x t x t u t u t C t
t t
h x t x t u t u t T t
h x u (85)
CASE I (Single steady state):31.36mV (volume of liquid in reactor)
7
0 7.08 10 1/hk (reaction rate constant)
30.02775m K/molJ (heat of reaction per mole per density per specific heat)
/ 8375KE R (activation energy over gas constant)
32.8 m /ht
p
UA
c (heat transfer coefficient x heat exchange area per density per specific heat)
38008 mol/mAi
C (inlet concentration of A)
373.3 Ki
T (inlet temperature)
The steady state corresponding to the input values for flowrate and coolant temperature3
1.133m /h532.6 K
s
cs
F T
(86)
is3393.2 mol/m
547.6 KAs
s
C
T
(87)
for the concentration of A and temperature in the CSTR.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 83/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 83 -
(HWNTHI: Verify the above steady state. Is it unique? Combining eqns. (81) at steady state yields a
single eqn. fors
T :
0
0
0
0
0 ( ) exp
exp
0 ( ) exp ( )
exp
s
Ai s
Ai As As As s s
s
s
Ai s t
i s s cs
s ps
s
F C F E V C C k C C
V RT F E k V RT
F C F UAE V T T Jk T T
V RT c V F E k
V RT
(88)
0
/
0
( ) ( ) 0exp[ ]
s
s
s
s
F
F Ai V t
i s s cs V F E R
pV T
Jk C UAT T T T
C V k
(89)
To visualize the solution of eqn. (89)fors
T , plot 0
/
0exp[ ]
s
s
s
F
Ai V
F E R
V T
Jk C
k and
( ) ( )s t
i s s cs
p
F UAT T T T
V C V vs.
s T ; find intersection. See Figure 9.)
Fi gur e 9 – Pl ot of heat gener at i on r at e (S- cur ve,0
/
0exp[ ]
s
s
s
F
Ai V
F E R
V T
Jk C
k ) and heat i nput mi nus
out put r ate ( ( ) ( )s t
i s s cs
p
F UAT T T T
V C V ) f or t he cont i nuous st i r r ed- t ank react or ( CSTR)
st udi ed.
Taylor-series approximate linearization of the state and output equations around a steady state
yields the following equations

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 84/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 84 -
, ,
, ,
( )( )
( )
( ) ( )
( ) ( ) ( )
s s
s s s s
s
s s s s
t t
t
d t t
dt
t t t
x u x u
x u x u
f f u ux xx u
h hy yx u
xA x B u
y C x D u (90)
where
f
x is the Jacobian matrix of the vector-valued function f of the vector x defined as
1 1
1
1
ˆn
n n
n
f f
x x
f f
x x
f
x
(91)
and similarly for
f
u
,
g
x
,
g
u
; and the deviation variables are defined as
( )( ) ( )
( ), ( ), ( )
s s s t t t
t t t
u ux x y y
x u y (92)
and , , ,A B C D are (Jacobian) matrices of appropriate dimensions defined in eqn. (90).
Therefore
00 2
00 2
16.974035 177.2558
0.4479112 2.0269367
s s
s s
E E
RT RT s
As
s E E
RT RT s t As
ps
F k E k e e C
V RT
F Jk E UAJk e e C V c V RT
A (93)
0 5599.118 0
128.162 2.05882
Ai As
i s t
p
C C
V T T UA
V c V
B (94)
1 0
0 1
C (95)
0 00 0
D (96)
• Eigenvalues of 10.76, 4.178 A .

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 85/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 85 -
Fi gur e 10 – Temperat ur e and concent r at i on r esponse of CSTR t o st ep change i n i nl et f l ow r ateby +10% of i t s st eady st ate val ue ( dashed l i ne = appr oxi matel y l i near i zed syst em; cont i nuousl i ne = nonl i near eqns. ( 81) ) . Note the i nver se r esponse of t emperat ur e t o f l owr ate.
CASE II (Multiple steady states):31.36mV (volume of liquid in reactor)
70
7.08 10 1/hk (reaction rate constant)
30.02775m K/molJ (heat of reaction per mole per density per specific heat)
/ 8375KE R (activation energy over gas constant)
30.5 m /ht
p
UA
c (heat transfer coefficient heat exchange area per density per specific heat)
38008 mol/mAi
C (inlet concentration of A)
373.3 Ki
T (inlet temperature)
The steady states for concentration of A and temperature in the CSTR corresponding to31.133m /h
400 Ks
cs
F
T
(97)
are multiple (Figure 11):

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 86/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 86 -
Fi gur e 11 – Pl ot of heat gener at i on rate ( S- cur ve,0
/
0exp
s
s
s
F
Ai V
F E R
V T
Jk C
k
) and heat i nput mi nus
out put r ate ( ( ) ( )s F
t i s s cs V
p
UAT T T T
C V ) f or t he cont i nuous st i r r ed- t ank react or ( CSTR)
st udi ed.
• Steady state 1 (Stable)37754 mol/m
386.4 KAs
s
C
T
(98)
0.8604 11.88
0.0007575 0.8712
A ,186.8 0
9.608 0.3676
B ,1 0
0 1
C ,0 0
0 0
D (99)
Eigenvalues of 0.8658 0.09469 j A (both in the left half-plane).
Period of CSTR-induced oscillations is2
66 h0.09469
, too long to observe before decay due
to exp[ 0.8658 ]t .
Fi gur e 12 – Temperat ur e and concent r at i on r esponse of CSTR t o st ep change i n i nl et f l ow r ateby +10% of i t s st eady st ate val ue ( dashed l i ne = appr oxi matel y l i near i zed syst em; cont i nuousl i ne = nonl i near eqns. ( 81) ) .
(HWNTHI: Verify the above.)

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 87/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 87 -
• Steady state 2 (Unstable)33983 mol/m
459.0 KAs
s
C
T
(100)
1.675 133.3
0.02336 2.498
A ,
2959 0
62.99 0.3676
B ,
1 0
0 1
C ,
0 0
0 0
D (101)
Eigenvalues of 1.525, 0.7019A (one in the right half-plane).
Fi gur e 13 – Temperat ur e and concent r at i on r esponse of CSTR t o st ep change i n i nl et f l ow r ateby +10% ( t op r ow) and - 10% ( bot t om r ow) of i t s st eady st at e val ue ( dashed l i ne =appr oxi matel y l i near i zed syst em; cont i nuous l i ne = nonl i near eqns. ( 81) ) . The CSTR escapesei t her t owards st eady st ate 1 or 3.
(HWNTHI: Verify the above.)

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 88/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 88 -
• Steady state 3 (Stable)3mol/m
519.3 K
850.7As
s
C
T
(102)
7.842 185.2
0.1945 3.938
A ,
5262 0
107.3 0.3676
B ,1 0
0 1
C ,0 0
0 0
D (103)
Eigenvalues of 1.952 1.151 j A (both in the left half-plane).
Period of CSTR-induced oscillations is2
5.5 h/cycle1.151
, too long to observe before decay
due to exp[ 1.952 ]t .
Fi gur e 14 – Temperat ur e and concent r at i on r esponses of CSTR t o st ep change i n i nl et f l ow r ateby +10% of i t s st eady st ate val ue ( dashed l i ne = appr oxi matel y l i near i zed syst em; cont i nuousl i ne = nonl i near eqns. ( 81) ) . Note t he i nver se r esponses of bot h t emperat ur e andconcent r at i on.
(HWNTHI: Verify the above.)

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 89/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 89 -
Theorem 21 – Diagonalization of a square matrix
The matrix n n A has distinct eigenvalues1,...,
n and eigenvectors
1,...,
n v v . Then
1
1 1 1 ...T T
n n n A P P v w v w (104)
where
1ˆ
n
P v v ,1
ˆ
n
,1
1 ˆ
T
T
n
w
P
w
,
• Why diagonalize?
− Solve systems of ordinary differential equations
− Solve optimization problems
−
Multivariate statistics
− Principal-stress analysis
− …
A
P
1P

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 90/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 90 -
EXAMPLE 57 – MODES OF CSTR MODEL THROUGH MATRIX DIAGONALIZATION
EXAMPLE 55
Steady state 1
16.974035 177.2558
0.4479112 2.0269367
-0.9994 0.9974 -10.7697 0 -1.9424 -26.9051
0.0350 -0.0720 0 -4.1774 -0.9436 -26.9586
A
Steady state 2
1.0000 0.9997 0.7019 0 1.4371 59.8649
0.0073 0.0240 0 1.525 0.4371
1.675 133.3
0.02336 2.49
59.8805
8
A
Steady state 3
0.9995 0.9995
0.0318 0.0062 0.0318 0.0062
1.952 1.153 0
7.842 18
5.2
0.1945 3.938
. 0 1.952 1.153
0..
i i
i
i
A
5003 2.5557 0 80.35770.5003 2.5557 0 80.3577
i i i i
• What is this good for?
Hint: EXAMPLE 55
1
1 1 1
( ) ( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
( ) ( ), 1,...,i
i i i
d t t
dt t t
d t t dt
t t
d t t
dt dz
z t g t i n dt
xAx f
P P x f
xP P x P f
z g
zz g

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 91/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 91 -
3.3 Quadratic forms
• Why?
- Frequent appearance in some optimization problems
- Can help understand basic concepts in collective properties of systems
• What is a quadratic form?
-
Loosely speaking: A multivariable extension of a quadratic polynomialCompare:
- Scalar2
22 2
f f Hx fx c H x c
H H
(105)
2
22
2opt
opt
min{ 2 } min{ }
(for ) if 0
(for ) else
f f Hx fx c H x c
H H x x
f f c x H
H H x
(106)
- Vector/matrix1 1 12 ( ) ( )T T T T c c x Hx f x x H f H x H f f H f
(107)
Note: 2 2T T f x x f (Why?)
1 1 1
opt 1
opt
min{ 2 } min{( ) ( ) }
(for ) if ( ) 0
(for ) else
T T T T
T
c c
c
x Hx f x x H f H x H f f H f x x
f Hf x H f H
x
(108)
EXAMPLE 58 – Q UADRATIC EXPRESSIONS AS Q UADRATIC FORMS
1 12 2
1 1 2 2 1 2 1 22 2
4 14 2 4 2 2 [ ] 2[1 1]
1 4T T
x x x x x x x x x x
x x
x f H x x
12 21 1 2 2 1 2
2
2 [ ] a b x ax bx x cx x x b c x
11 12 13 12 2 2
11 1 22 2 33 3 12 1 2 13 1 3 23 2 3 1 2 3 12 22 23 2
13 23 33 3
2 2 2
a a a x
a x a x a x a x x a x x a x x x x x a a a x
a a a x

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 92/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 92 -
Definition 15 – Quadratic form
Quadratic form is defined asT x Ax (109)
where n n A symmetric, n x
Note:n n
A in eqn. (109) can be assumed symmetric without loss of generality. Because, ifn n A is not symmetric, then it can be shown (how?)
2
T T T T
A Ax Ax x x x Hx
with n n H symmetric ( T H H ).
Theorem 22 – Eigenvalues of symmetric matrix
n n A symmetric eigenvalues of A are real.
Quick proof: Let , v be complex eigenvalue, eigenvector of n n A . Then
( )
0 0
(Why?) (Why?)
T T
T T T
T T T
Av v v Av v vv Av v Av v v
Av v v Av v v v v
Theorem 23 – Eigenvectors of symmetric matrix
n n A symmetric eigenvectors ,i j
v v of A corresponding to eigenvaluesi j
are
orthogonal (orthonormal) to each other.Quick proof:
( ) 0
0 (Why?) 0
T T
i i i j i i j i
T T T
j j j i j j i j j j i
T T T T
j i i j i j j i j i
Av v v Av v v
Av v v Av v v v v
v Av v Av v v v v
,i j
v v are orthogonal to each other; orthonormal to each other if, in addition,
2 2
1, 1ˆ ˆT T
i i i j j j v v v v v v .
Theorem 24 – Diagonalization of symmetric matrix
n n A symmetric T A P P (110)
where is diagonal, P orthonormal.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 93/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 93 -
Theorem 25 – Eigenvalues ofT M M
T n n A M M eigenvalues of A are non-negative.
Quick proof:
Let , v be real (why?) eigenvalue, eigenvector of T n n A M M . Then
( ) 0 (Why?)
0
(Why?)
T T T
T T T T
T T
v M Mv Mv MvM Mv v v M Mv v vv v v v
Theorem 26 – Quadratic form with linear term
If H is invertible, the quadratic-plus-linear expression 2T T c x Hx f x can be brought to the pure
quadratic form T d z Hz .
Quick proof: (Cf. eqn. (106).)
Define6 10 ˆ x H f
0 0 0 0
0 0
2 ( ) ( ) (Why?)
( ) ( ) (Why?)
T T T T
T
T
d
x Hx x f x x H x x x Hx
x x H x x
zz
, (111)
6 This is the vector/matrix version of “completing the square” that you learned in junior high school for quadratic equations:
2 2 22 ( )Hx xf H x f H f H

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 94/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 94 -
3.3.1 Visualize quadratic forms
2 2
1 1 ...T T T T
n n
T
c c c z z c x Hx x P P x z z
zz
(112)
0i
eqn. (112) defines ellipsoid in rotated orthogonal z -coordinates, with semi-axes
1
,...,n
c c
.
Rotated coordinates have eigenvectors of H as basis vectors:
1 1 ...T
n n z z z P x x Pz v v
• 1D: Eq. (112) 2xHx c Hx c
Fi gur e 15 – Poi nt s cor r espondi ng t o t he quadr ati c- f orm equati on2Hx c .
• 2D: Eq. (112)
2 22 2 1 2
1 1 2 2 2 2
1 2
1T T T T
T
z z c c c z z c
c c
x Hx x P P x z z
zz
Fi gur e 16 – El l i pt i cal cont our s cor r espondi ng t o the quadr at i c- f or m equat i onT c x Hx .
c1
c2
c3
c4
c5
Hx
1z
2z
1c
2c
1x
2x

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 95/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 95 -
EXAMPLE 59 – VISUALIZE Q UADRATIC FORM
1 1 1 11 12 2 2 2
1 1 1 12 2 2 2 2
1 2
4 1 3 0
1 4 5 0T
H P P P
v v
2 22 2 1 21 2 2 2
3 5 1
3 5
T z z
c z z c
c c
x Hx ellipse on z -plane
Fi gur e 17 – El l i pt i cal cont our s i n t he z - pl ane cor r espondi ng t o t he quadr ati c- f orm equati on
2 2
1 23 5z z c .
Connection between z and x coordinates:
Every point 1
2
ˆx
x
x can be expressed as a linear combination of the unit vectors1 2,e e in the x -plane
(Figure 18) as
1 1
1 2 1 1 2 22 2
1 0 1 0
0 1 0 1
x x x x x x
x x
e e
Fi gur e 18 – Vect or r epr esent ati on i n x - pl ane
1x
1
2
x
x
1
1ˆ
0
e
2
0ˆ
1
e
2x
1z
2z
3c
5c

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 96/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 96 -
1 1
12 21 1 2 21 1
22 2
1 2
T z
z z z
z P x x Pz v v
v v
where 1 2,v v are orthonormal, and produced from rotation of 1 2,e e (Why?) every point 1
2
x x
x
can be expressed as a linear combination of the vectors1 2,v v in the z -plane using weights
1 2,z z
(Figure 19, Figure 20). But points in the z -plane fall on an ellipse for a given c (Figure 17).
Fi gur e 19 – Vect or r epr esent ati on i n z and x - pl anes.
Fi gur e 20 – El l i pt i cal cont our s cor respondi ng t o t he quadr at i c- f or m equat i on2 2
1 1 2
2 2
1 22 34 2 4 5T T x x x x c z z c x Hx z z i n 2D and 3D.
1z
2z
3c
5c
1x
2x
2e
1e
2z
1
2
z
z
2
v
1v
1x
2x
1z

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 97/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 97 -
3.3.2 Optimization with quadratic forms and linear inequalities (quadratic programming)
EXAMPLE 60 – Q UADRATIC PROGRAMMING FOR A DISTILLATION COLUMN
Fi gur e 21. Low- pur i t y di st i l l at i on col umn.
For the low-purity binary distillation column shown in Figure 21, the following model captures the
effect of the reflux and boil-up flow rates (manipulated inputs) on the top and bottom concentrations(controlled outputs).
0.7 0.9
1.0 0.9D
B
y L
x V
y G m
or
1 1
2 2
0.7 0.9
1.0 0.9
y m
y m
y G m
(113)
(All variables are shown in deviation from the normal operation steady state).
It is desired to select values for the manipulated inputs, namely reflux and boil-up flow rates
L and V , respectively, such that the output vector1 2
[ ] [ ]ˆ ˆT T
D B y x y y y of top and
bottom concentrations approaches the setpoint vectorSP [1 1]T y as close as possible.
Eqn. (113)
SP
1 0.7 0.9 6.67
1 1.0 0.9 6.30
L L
V V
G my
(114)
Distillate, D
Bottoms, B
Condenser
ReboilerBoil-up
V
Reflux
L y D
x B
Feed

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 98/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 98 -
3.3.2.1 Case 1
The flow rates L and V cannot be moved arbitrarily, but must satisfy the constraints
5 20
20 10
L
V
(115)
Unfortunately, the above 6.67L in eqn. (114) does not satisfy the constraints, eqn. (115)
( 6.30V does). What is the best that can be achieved in this case?
- Mathematical problem formulation:
Select L and V to minimize distance of [ ]ˆ T
D B y x y from setpoint SP SP SP[ ]ˆ T
D B y x y
[1 1]T :
1 2
2SP SP 2 SP 2
1 1 2 2,2min min[( ) ( ) ]
m m y y y y
my y
(116)7
subject to the constraints in eqn. (115).
Using eqn. (113), write2
SP
2y y in terms of [ ]ˆ T L V m
2SP SP SP
2SP SP
SP SP
SP SP SP
2 2
11 22 12 1 2
( ) ( )
( ) ( )
( ( ) )( )
2 ( )
2( 2 2 2 )
T
T
T T T
T T T T T
T T
c h L h V h L V f L f V c
y y y y y y
Gm y Gm y
m G y Gm y
m G Gm m G y y y
m Hm m f
(117)
where
1.49 1.53
1.53 1.62ˆ T
H G G
(118)
SP 0.3
ˆ0.
T
f G y
(119)
andSP SP( )ˆ T c y y
is not important (Why?)
Theorem 26 2T T
m Hm m f in eqn. (117) can be brought to the form T d x Hx where1ˆ x m H f (120)
2
SP
2y y represents elliptical contours in
1 2( , )x x -plane (Figure 21, Figure 22).
7 Recall that the 2-norm of a vector x inn is defined as
2 2
12... T
n x x x x x ,

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 99/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 99 -
- Graphical solution
Fi gur e 22. Sur f ace pl ot of ( , ) 2ˆ T T g L V m Hm m f .
Fi gur e 23. Cont our pl ot of ( , ) 2T T g L V m Hm m f and gr aphi cal sol ut i on of eqn. f or
opt
1 5ˆm L and
opt
2 4.7222ˆm V , resul t i ng i n
opt
1 0.75y ( i nst ead of 1) and
opt
1 0.75y ( i nstead of - 1) .
-
Numerical solution using Excel Solver in Appendix A.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 100/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 100 -
3.3.2.2 Case 2
The flow rates L and V cannot be moved arbitrarily, but must satisfy the constraints
10 20
20 10
L
V
(121)
Luckily, the above L and V satisfy the constraints, eqn. (121).
-
Mathematical problem formulation
The same formulation as in Case 1 can be used again:
1 2
SP 2 SP 2 SP 2
1 1 2 2, ,2min ( , ) min( ) min[( ) ( ) ]ˆ
D B L V y y f y x y y y y
yy y
(122)
subject to the constraints in eqn. (121).
- Graphical solution
o The surface plot of ( , ) 2T T g L V m Hm m f is the same as in Figure 22.
Fi gur e 24. Cont our pl ot of ( , ) 2T T g L V m Hm m f and const r ai nt s. Opt i mum i s at
opt
1 6.6667ˆm L and
opt
2 6.2963ˆm V , resul t i ng i n
opt
1 1y and
opt
1 1y as
desi r ed. Not e si mi l ari t i es wi t h and di f f er ences fr om Fi gur e 23.
- Numerical solution using Excel Solver in Appendix B.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 101/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 101 -
3.3.3 Quadratic programming in general
min( 2 )T T x
x Hx x f (123)
subject to
Ax b (124)
or, in detail,
1
2 2
11 1 21 2 1 , 1 1 1 1,...,min( ... 2 ... 2 2 ... 2 )
2n
nn n n n n n n n x x
T T
h x h x h x x h x x f x f x
x f x Hx
(125)
subject to
11 1 1 1
1 1
...
...
n n
m mn n m
a x a x b
a x a x b
(126)
( ) 0i
H for all i Numerical solution of eqns. (123) and (124) is easy.
( ) 0i
H for some i Numerical solution of eqns. (123) and (124) is extremely difficult for large
problems.
- General numerical solution via a number of methods.
- Software readily available.
-
What does the optimum look like?

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 102/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 102 -
• To visualize, define8 1
0 ˆ x H f
0 0 0 0
0 0
0
min{ 2 } min{( ) ( ) } (Why?)
min ( ) ( ) (Why?)ˆ
= min{ }
T T T T
T
T
T
d
d
x Hx x f x x H x x x Hxx x
x x H x xy x x
yyy Hy
y
, (127)
subject to
0 0 Ax c Ax Ax c Ax Ay b
b
, (128)
•
To minimize, without constraints in eqn. (124)
min{ 2 }= min{ }T T T d d x Hx x f y Hyx y
, (129)
obtained foropt opt 1
0 ˆ y 0 x x H f (130)
(Why?)
8 This is the vector/matrix version of “completing the square” familiar since junior high school for quadratics:2 2 22 ( )Hu uf H u f H f H . The vector/matrix version can also be untangled to a sum of quadratics:
2 21 1 1 1
2 2
1 1 1 1
2 2
1
1
min{ 2 } min{ 2 }
min{ 2 }
min{ ... 2 ... 2 }
min{( 2 ) ... ( 2 )}
( ... )
T T T T T T
T T
n n n n
n n n n
n
n
z z g z g z
z g z z g z
g g
x Hx x f x P P x x P P f x x z g
z z z gz
z
z
attained at
opt , 1, ...,k
k
k
g z k n
.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 103/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 103 -
Fi gur e 25 – El l i pt i cal cont our s cor r espondi ng t o t he quadr at i c- f or m equat i on T c y Hy
subj ect t o Ay b .
1z
2z
1c
2c
1y
2y
Ay b
1x
2x
0,1x
0,2x
Optimum

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 104/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 104 -
4. SINGULAR-VALUE DECOMPOSITION9 (SVD)
4.1 What is singular-value decomposition (SVD)?
Theorem 27 – Diagonalization of a general non-square matrix
The matrix m n A can be factorized as
1 1 1 ...T T T r r r A USV u v u v (131)
where
1ˆ m m
m
U u u ,
1
ˆ m n
r
S
,1ˆ n n
n
V v v ,
with
•
rank( )ˆr A
• 1
{ ,..., }m
u u = eigenvectors of T AA
• 1
{ , ..., }n
v v = eigenvectors of T A A
• 1 1 1
{ ,..., } { ( ),..., ( )} { ( ),..., ( )}ˆ T T T T
r r r A A A A AA AA =
= Nonzero singular values of A = nonzero e-values of T AA = nonzero e-values of T A A (Why?)
9 “…SVD is not nearly as famous as it should be”
- Strang, G. Linear Algebra and its Applications, 2nd edition, Academic Press, New York, 1980, p. 142.
1
T v + 1
1
u + T
r v
r
r
u
A
U
T V
S

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 105/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 105 -
Note: Because bothi
u are orthonormal eigenvectors of T AA and bothi
v are orthonormal
eigenvectors of T A A , the sign ofi
u (for 0i
) must be adjusted to match the sign of the
correspondingi
Av , or, equivalently, the sign ofi
v must be adjusted to match the sign of the
corresponding T i
A u .
(Why? Hint:
...T T
i i i i i i i i i A Av v AA Av Av Av u and similarly T
i i i A u v .)
Theorem 28 – Matrix condition number (based on the induced 2-norm)
n n A
1 max
2 2min
cond( )ˆi i
A A A (132)
Theorem 29 – Matrix inversion via SVD
m n A
1
1 1
1p pT T
i i i i i i i
i
A u v A v u (133)
Note:
Theorem 30 – Rank property
m n A rank( ) rank( ) rank( ) rank( )T T T AA A A A A (134)
4.2 Why SVD?
• Least squares parameter estimation
• Multivariate statistics
• Model reduction (approximation)
• Others
4.3 Software for SVD
• Matlab:>> hel p svd
• Mathematica:Si ngul arVal ueDecomposi t i on

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 106/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 106 -
EXAMPLE 61 – SVD OF THE HILBERT MATRIX
>> f or i =1: 5, f or j =1: 5, Hi l ( i , j ) =1/ ( i +j - 1) ; end, end>> [ U, S, V] = svd( Hi l )
U =- 0. 7679 0. 6019 - 0. 2142 0. 0472 0. 0062
- 0. 4458 - 0. 2759 0. 7241 - 0. 4327 - 0. 1167- 0. 3216 - 0. 4249 0. 1205 0. 6674 0. 5062- 0. 2534 - 0. 4439 - 0. 3096 0. 2330 - 0. 7672- 0. 2098 - 0. 4290 - 0. 5652 - 0. 5576 0. 3762
S =1. 5671 0 0 0 0
0 0. 2085 0 0 00 0 0. 0114 0 00 0 0 0. 0003 00 0 0 0 0. 0000
V =- 0. 7679 0. 6019 - 0. 2142 0. 0472 0. 0062
- 0. 4458 - 0. 2759 0. 7241 - 0. 4327 - 0. 1167- 0. 3216 - 0. 4249 0. 1205 0. 6674 0. 5062- 0. 2534 - 0. 4439 - 0. 3096 0. 2330 - 0. 7672- 0. 2098 - 0. 4290 - 0. 5652 - 0. 5576 0. 3762
>> U*S*V'
ans =1. 0000 0. 5000 0. 3333 0. 2500 0. 20000. 5000 0. 3333 0. 2500 0. 2000 0. 16670. 3333 0. 2500 0. 2000 0. 1667 0. 14290. 2500 0. 2000 0. 1667 0. 1429 0. 12500. 2000 0. 1667 0. 1429 0. 1250 0. 1111
>> Hi l 3 = U( : , 1: 3) *S( 1: 3, 1: 3) *V( : , 1: 3) '
Hi l 3 =1. 0000 0. 5000 0. 3333 0. 2500 0. 20000. 5000 0. 3333 0. 2501 0. 2000 0. 16660. 3333 0. 2501 0. 1999 0. 1666 0. 14300. 2500 0. 2000 0. 1666 0. 1428 0. 12500. 2000 0. 1666 0. 1430 0. 1250 0. 1110
>> Hi l - Hi l 3
ans =
1. 0e- 003 *0. 0007 - 0. 0062 0. 0096 0. 0033 - 0. 0080
- 0. 0062 0. 0573 - 0. 0885 - 0. 0305 0. 07370. 0096 - 0. 0885 0. 1371 0. 0463 - 0. 11320. 0033 - 0. 0305 0. 0463 0. 0185 - 0. 0407
- 0. 0080 0. 0737 - 0. 1132 - 0. 0407 0. 0956

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 107/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 107 -
1 1 1 5 5 5 1 1 1 3 3 3... ...T T T T T H USV u v u v u v u v
1 1
1 1 5 5
1 5
1 1...T T T
H VS U v u v u
cond( ) ?H
1
T v + 1
1
u + 5
T v 5
5
u
H
U
T V S
1
T v + 1
1
u + 3
T v 3
3
u

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 108/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 108 -
Theorem 31 – Matrix approximation using SVD
Consider the matrix
1ˆ m n
n
X x x (135)
Then the optimal approximation of X by a matrix ̂ of lower rank, p , in the sense
2ˆ arg min
rank( ) min( , )p m n
X (136)
where the matrix norm in eqn. (136) is either the induced 2-norm10 or the Frobenius norm,11 can be
shown12 to be
1 1ˆ p pT T
i i i i i i i
i
u v y v
y
(137)
where1
0p
are the p ( p r ) largest singular values of1
n T T
i i i i
X u v USV , and
,i i
u v are the corresponding standardized singular vectors. (The vectors ˆi i i
y u in eqn. (137) are
called principal components).
In addition,
22
2 1ˆ
i p
X (138)
and
22
1ˆ n
F i i p
X . (139)
- Also known as
o
principal component analysis (PCA),
o
Karhunen-Loéve expansion,
o proper orthogonal decomposition
- Applications in control, statistics, model reduction…
10 22 max
2
maxˆi σ
≠= =
v 0
AvA
v, where 2
2 iiv= ∑v is the Euclidean vector norm.
11 2 2ˆF ij k i j k
a σ = =∑ ∑ ∑A . Both the induced 2-norm and the Frobenius norm are frequently called Euclidean norm
in literature. The reason is that the induced-2 norm is induced by a Euclidean vector norm, and the Frobenius norm would
be a Euclidean vector norm if the matrix A were re-organized as a vector.12P. Dewilde and E. F. Deprettere, "Singular Value Decomposition: An Introduction," in SVD and signal processing:
algorithms, applications, and architectures, E. F. Deprettere, Ed.: North-Holland, 1988, pp. 3-41.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 109/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 109 -
EXAMPLE 62 – SVD AND CONDITION NUMBER FOR BINARY DISTILLATION COLUMN
Fi gur e 26 – Hi gh- pur i t y bi nar y di st i l l at i on col umn13.
0.78
0.71 0.710.6
0.71 0.
0
710.63 2.0
0.78
.878 0.8
3 0.01
64
1.082 1.09
0 4
6
0
D
B
T
y L
x V
y G m
VU S
1 2
1
1
22
2
1
2
1
2
1
0.780.01
0.632.0
4 (0.71 0.71 )0.6
( 0.71 0.71 )0.78
2.
3
ˆ
ˆT
T
L
V
m m
m m
m
m
v
vu
mu
1
11
1
1 2
0.630 ( 0.71 0.
ˆ
71 )0.78
T
m m
umv
13M. Morari and E. Zafiriou, Robust Process Control , Prentice-Hall, 1989.
Distillate, D
Bottoms, B
Condenser
ReboilerBoilup
V
Reflux
Ly D
x B
Feed
Strong
direction
Weak
direction

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 110/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 110 -
Fi gur e 27 – Response of hi gh- pur i t y bi nary di st i l l ati on col umn t o changes i n r ef l ux and boi l -up r at es.
cond( ) 142G
• What does this condition number mean?
− Desired1
0D
B
y
x
.
RequiredL
V
:
1 0.878 0.864 39.9417
0 1.082 1.096 39.4315
L L
V V
y G m
What ifreal
G G ?
real real
0.88 0.86 0.88 0.86 39.9417 1.24
1.08 1.10 1.08 1.10 39.4315 0.24
L
V
G G
Percent error = ________________________________________________
The sensitivity of a solution to data is as important as the solution itself.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 111/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 111 -
Eqn. (133)
1
1
0.78
0.71 0.710.63 0.
0.71 0.7100.878 0.864 0
1.082 1.0
.63 2.0
0.78
0.632.0
96
0.78
0 014
T
u
VG U S
1
1
1
2
1
22
21
0.780.014 0.71 0.7100.71 0.71
0.7110.63 0.78
0.712.0
1 /
.63
0.711
0.014
1 /T
T T
v
uv
G
vu
22
222
0.78 0.630.71
0.711 0.78 0.630.710.014
1 /
T
T
uv
uv

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 112/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
- 112 -
Appendix A. Numerical solution of EXAMPLE 59 – Quadratic Programming for a Distillation Column, using Excel Solver
Fi gur e 28. Excel sheet t o sol ve t he quadr at i c pr ogr ammi ng pr obl em. Opt i mum i s atopt
1 5ˆm L and
opt
2 4.7222ˆm V , resul t i ng i n
opt
1 0.75y ( i nst ead of 1) and
opt
1 0.75y ( i nstead of - 1) .
.
Fi gur e 29. Excel Sol ver f or sol ut i on of t he quadr at i c pr ogr ammi ng pr obl em.

7/23/2019 CHEE6330 LectureNotes Matrix Algebra(16)
http://slidepdf.com/reader/full/chee6330-lecturenotes-matrix-algebra16 113/113
CHEE 6330 Lecture Notes Matrix Algebra Michael Nikolaou
Appendix B. Numerical solution of EXAMPLE 59 – Quadratic Programming for a Distillation Column, using Excel Solver
Fi gur e 30. Excel sheet t o sol ve t he quadr at i c pr ogr ammi ng pr obl em. Opt i mum i s at Opt i mum i s
at opt1
6.6669ˆm L and opt2
6.2965ˆm V , resul t i ng i n opt
1 1y and opt
1 1y as
desi r ed. Not e si mi l ari t i es wi t h and di f f er ences fr om Fi gur e 28.