-
fHyark
d Pho
ed fo
human interaction and can be available for users within tion of
sufficiently large CCD arrays is impossible at themoment, so
large-format digital cameras are built eitheras multi-head systems
by fusing several smaller CCD
ISPRS Journal of Photogrammetry & Remote1. Introduction
Photogrammetric imaging techniques are changingover from analog
to digital. The advantages of digitaltechniques over analog are
undeniable: superior radio-metric quality, lower material costs,
and shorter produc-tion cycles, to name but a few. By using digital
imagingand direct georeferencing (DG), up-to-date georefer-enced
imagery can be produced practically without
hours of image acquisition. On the application side,improved
image quality makes it possible to automateimage measurement tasks,
improves interpretability, andenables interpretation of images
using remote sensingmethods. The performance of the sensors must be
knownand sensor calibration must be accurately determined inorder
to fully meet expectations.
Conventional photogrammetric mapping is based on23 cm23 cm
large-format film cameras. The produc-Test field system calibration
will be a fundamental part of the future photogrammetric production
line. Accurate calibration andperformance evaluations are necessary
for fully assessing the stability and accuracy of digital sensing
techniques. In this paper, amethod of comprehensive geometric
calibration in a test field has been developed and empirically
tested using eight image blockscollected with three UltraCamD
digital large format photogrammetric cameras. Permanent
photogrammetric test fields form the basisof the method. Important
components of the method are determination of system parameters,
evaluation of systematic errors, andassessment of geometric
accuracy. The results showed that UltraCamD images contained
systematic deformations that could not bemodeled with single lens
additional parameter models. Good point determination accuracy was
obtained despite the systematic errors;the typical accuracy was 23
m in image space in the horizontal coordinates and 0.050.09 of the
object distance in height. One ofthe cameras had significantly
poorer performance. In the worst cases, the horizontal accuracy was
5 m in image space and the heightaccuracy was 0.18 of the object
distance. The analog cameras gave better results than the
UltraCamD, but the development ofappropriate mathematical models
for UltraCamD as well as improvements in digital sensors may change
the situation in the near future. 2006 International Society for
Photogrammetry and Remote Sensing, Inc. (ISPRS). Published by
Elsevier B.V. All rightsreserved.
Keywords: accuracy; aerial; Calibration; camera; distortion;
geometric; orientationAbstractAvailable online 21 June
2006Geometric test field calibration o
Eija Honkavaara , Eero Ahokas, JuhaRisto Kuittinen, Lauri M
Finnish Geodetic Institute, Department of Remote Sensing an
Received 31 August 2005; received in revisCorresponding author.
Tel.: +358 9 295 55 202; fax: +358 9 295 55211.
E-mail address: [email protected] (E. Honkavaara).
0924-2716/$ - see front matter 2006 International Society for
PhotogramAll rights
reserved.doi:10.1016/j.isprsjprs.2006.04.003digital photogrammetric
sensors
ypp, Juha Jaakkola, Harri Kaartinen,elin, Kimmo Nurminen
togrammetry, Geodeetinrinne 2, FIN-02430 Masala, Finland
rm 13 April 2006; accepted 13 April 2006
Sensing 60 (2006) 387399www.elsevier.com/locate/isprsjprsarrays
and cameras or by using linear CCD arrays(Cramer, 2004; Petrie,
2003, 2005). The design principle
metry and Remote Sensing, Inc. (ISPRS). Published by Elsevier
B.V.
-
ogramof high-end systems has been that they should be as goodas
conventional analog cameras and in many aspectseven better (Drstel,
2003; Fricker, 2001; Leberl andGruber, 2003).
The geometric accuracy and stability of complicateddigital
large-format sensors is an important issue. Eventhough published
results indicate the high quality ofdigital cameras (e.g. Alhamlan
et al., 2004; Drstel,2003; Kremer and Gruber, 2004), more
detailedstudies are needed to draw further conclusions andmake
recommendations about the use of new sensorsin both conventional
and new applications. Theoptimal use of sensors requires exact
knowledge oftheir performance.
The Finnish Geodetic Institute (FGI) has maintainedpermanent
test fields for photogrammetric systemcalibration and testing since
1994 (Ahokas et al.,2000; Kuittinen et al., 1994). Recently, the
test fieldshave been used to calibrate for DG (Honkavaara,
2004;Honkavaara et al., 2003) and to calibrate and test
digitalphotogrammetric sensors (Honkavaara et al., 2005). Theuse of
these test fields for geometric calibration isdescribed in this
article.
The calibration issue will be investigated only from atechnical
point of view; formal aspects such ascalibration standards are not
considered. Exact mathe-matical formulations and tolerances go
beyond thescope of this article. The principles of
cameracalibration can be found in Eisenhart (1963) andLivingston et
al. (1980). Studies on test field calibrationfor DG and the
calibration of digital cameras haverecently been reported by Cramer
(2004, 2005), Cramerand Stallman (2002), Heipke et al. (2002),
Honkavaara(2004), Honkavaara et al. (2003, 2005), Jacobsen(2004)
and Merchant et al. (2004). Several internationalgroups are working
on the area of field calibration andtesting of the geometry and
radiometry of airborne andspaceborne imaging systems. Important
working groupsinclude the CEOS/ISPRS calibration and validation
taskforce, the USGS Digital Camera Characterizationinitiative, and
the EuroSDR network on Digital CameraCalibration (see Cramer, 2005
for further details ofthese groups).
The objectives of this study were to develop amethod for
geometric test field calibration of digitalphotogrammetric sensors
and by using the method toempirically evaluate the performance of
the VexcelUltraCamD digital photogrammetric large-formatcamera. The
calibration method is outlined in Section2. Test materials and
methods are described inSection 3 and the results are presented and
discussed
388 E. Honkavaara et al. / ISPRS Journal of Photin Section 4.2.
Calibration method
2.1. Outline of the method
The suggested method includes the following steps:(1) image
collection of a calibration block in an accuratetest field, (2)
automatic tie point measurement andinteractive control point
measurement, (3) self-calibrat-ing and non-self-calibrating bundle
block adjustment,(4) analysis of the calibrated parameters, (5)
analysis ofresiduals from various observations (image, GPS,
GPS/IMU), (6) geometric accuracy assessment and (7)
otherevaluations (e.g. stability, previous calibrations etc.).
Inthis study, the calibration quantities, calibration blocks,and
test fields are briefly described and the results ofempirical
calibration blocks from three UltraCamDs arepresented.
2.2. The quantities to be determined
In the proposed geometric calibration procedure, thesystem
parameters are determined and the geometricaccuracy is evaluated.
These tasks are performed bymeans of an appropriate calibration
block (Section 2.3),a geometric test field (Section 2.4), and a
self-calibratingbundle block adjustment (Frstner et al., 2004).
The following quantities characterize the geometricperformance
of the system:
The fundamental lens parameters, i.e. principal point(x0, y0)
and principal distance (c),
The geometric distortion characteristics of thecamera system;
distortions can be modeled usingphysical, empirical or mixed
additional parameters(Frstner et al., 2004),
The systematics of the image observation residualsbefore and
after self-calibration,
Misalignments of the sub-systems (camera, GPS,IMU): lever arms
and boresight misalignments,
The errors in GPS and IMU observations, Point determination and
back projection accuracybefore and after self-calibration.
The geometric distortion characteristic of digitallarge format
systems is an important issue. Typically, thecamera manufacturers
claim that images are distortion-free (e.g. Krpfl et al., 2004),
but this should be verifiedby test flights. Well-established
physical deformationmodels are the most attractive option for test
fieldcalibration, but in the end the selection of theappropriate
model should be based on a detailed
metry & Remote Sensing 60 (2006) 387399analysis of the
entire system. Important considerations
-
ograminclude the correlation of the parameters and the
manyphysical factors resulting in additional distortions(Frstner et
al., 2004; Section 3.3).
2.3. Calibration block
The fundamental parameters of the calibration blockare its
structure and flying height. The block structureaffects the
accuracy and determinability of variousparameters. Three
appropriate block structures weresuggested by Honkavaara (2004) for
integrated GPS/IMU/camera-system calibration: a comprehensive
block(e.g. 2 to 4 parallel flight lines and 2 to 4 crossing
flightlines), a cross block (2 perpendicular bidirectional
flightlines), and a line block (single bidirectional flight
line).The blocks should have large side and forward
overlaps(6080%). A comprehensive block structure gives thebest
accuracy and should be used for the mostdemanding tasks, but since
the number of flight linesis also a cost factor, the two other
block structures wereconsidered feasible in several applications.
To be able todetermine the principal distance accurately, either
theblock must contain extensive height differences, or theimage
centres must have been accurately determined byGPS and two image
blocks with different scales must beadjusted simultaneously
(Jacobsen, 2004).
Another important block parameter is the flyingheight. In the
case of analog cameras, the calibration isnormally determined for
each mapping scale, becausedifferent environmental conditions
(pressure, tempera-ture, etc.) at different flying heights affect
the systemcalibration (Heipke et al., 2002; Honkavaara et al.,
2003,Jacobsen, 2004; Merchant et al., 2004). A recommendedapproach
is to simultaneously process two flyingheights, which makes the
calibration valid at these twoscales and at all the scales between
them (assuming thata linear interpolation scheme is appropriate to
model theeffect of flying height on the parameters). In the case
ofdigital cameras, the stability with respect to flying heightis an
important research topic that should be studiedwith various types
of survey aircraft.
2.4. Geometric test field
The test field for the geometric calibration consists ofa
network of targeted benchmarks. The FGI hasestablished the
following permanent test fields to enablecalibration at various
scales (Ahokas et al., 2000;Kuittinen et al., 1994):
The large-scale test field (ground sample distance
E. Honkavaara et al. / ISPRS Journal of Phot(GSD)
-
calibration target with 240 control points is used. A setof 84
calibration images is taken of the calibration targetfrom 3 fixed
camera stations using various orientations.The control points are
measured automatically andspecific UltraCamD geometric parameters
are deter-mined with a self-calibrating bundle block adjustment.The
UltraCamD geometric parameters include cameraparameters for each
cone (principal distance, principalpoint and lens distortions),
parameters of CCD posi-tions, look-up tables of the remaining
displacements,and the approximate transformation parameters
betweenthe cones. The calibration process is described in detailby
Krpfl et al. (2004) and an example of the
3.2. Flight missions
The parameters of the missions were the following:
Several flying heights to evaluate the performance ofthe sensor
with respect to the flying height,
Several flight dates to evaluate the stability of thesystem,
Several cameras to evaluate the performance of thecamera
type,
Comparison with conventional analog cameras torelate the new
results to conventional methods.
ying h
50500010300000501010
390 E. Honkavaara et al. / ISPRS Journal of Photogrammetry &
Remote Sensing 60 (2006) 387399comprehensive calibration protocol
is provided byCramer (2004).
In the image post-processing phase the correctionsdetermined in
the laboratory are applied to the sub-images and the images are
stitched together automat-ically using software provided by the
manufacturer. Inthe stitching process, the slave images are fitted
to themaster image using projective transformation; theparameters
are based on laboratory calibration and areimproved by
automatically measuring tie points be-tween overlapping image
areas. The results of thestitching process are distortion-free,
large-format, high-resolution, panchromatic, color, and
color-infraredimages. Low-resolution color and color-infrared
imagescan also be calculated. For the data user, the
necessarycamera parameters are the principal distance,
principalpoint coordinates, and pixel size (Krpfl et al.,
2004;Leberl and Gruber, 2003).
The correctness of this image formation process hasto be tested
in practice. A key issue is the degree towhich
laboratory-calibrated values are valid in airborneconditions and
the level of stability of these parameters.If the calibration is
not valid, systematic errors canappear in various sub-images.
Table 1Blocks used in geometric quality evaluation
Block Date d.m.y Test field GSD [cm] Optic [mm] Fl
u1_g4 11.10.04 Sjkulla 4 101.4 4u2_g4 14.10.04 Sjkulla 4 101.4
4u2_g8a 14.10.04 Sjkulla 8 101.4 9u2_g25 14.10.04 Jms 25 101.4
28u2_g50 14.10.04 Jms 50 101.4 56u2_g8b 15.10.04 Sjkulla 8 101.4
9u2_g8c 15.10.04 Sjkulla 8 101.4 9u3_g4 14.05.05 Sjkulla 4 101.4
4r3300 24.04.02 Sjkulla 6.6 214.108 7r4000 25.04.02 Sjkulla 8
153.030 6
r31000 09.09.04 Jms 62 153.030 4743Three technically similar
UltraCamD cameras (UC1,UC2 and UC3) were calibrated in test fields.
The imageblocks were collected at Sjkulla at large scales (GSD4 cm
and 8 cm) and at Jms at small scales (GSD 25 cmand 50 cm). Details
of the test fields were provided inSection 2.4. Comprehensive
blocks with four parallelflight lines and two cross-strips, and
cross blocks withtwo perpendicular bi-directional flight lines
werecollected (Table 1 and Fig. 1).
The UC1 mission took place at Sjkulla on October11, 2004. The
aperture was 5.6 and exposure times were1/1251/175 s. The flying
speed was approximately80 m/s. GPS data were acquired during the
mission, butunfortunately their quality was not sufficient
foraccurate analysis. In this mission, a cross-shapedimage block
with a 4 cm GSD was collected (u1_g4).
The UC2 mission was performed with a hiredUltraCamD on October
1415, 2004. The camera wasinstalled in the aircraft OH-ACN
(Rockwell TurboCommander 690A with a pressurised cabin and
twocamera holes) belonging to the National Land Survey ofFinland
(NLS). The aperture was 5.6 and the exposuretimes were 1/901/125 s.
The flying speed was 80 m/sand more. The gyro-stabilized mount
(GSM3000) did
eight [m] Scale Swath [m] Overlaps [%] Num. images
1:4440 460 p: 60 321:4440 460 p, q: 60 321:8880 920 p: 60
321:27780 2875 p: 60 1181:55560 5750 p: 60 641:8880 920 p: 60
271:8880 920 p: 60 261:4440 460 p: 80, q: 60 601:3300 759 p, q: 80
201:4000 920 p, q: 60 24
1:31000 7130 p: 60 34
-
not function correctly, which resulted in fairly largeimage
tilts (typically 02, in maximum 5) and crabangles. The Jms blocks
were collected late in theevening in inadequate light conditions
and the borderregions of the images did not have sufficient light.
Thiscaused difficulties with tie point measurements in theborder
areas. Accurate GPS/IMU processing also failedon this second
mission. Image blocks with a 4 cm, 8 cm,25 cm and 50 cm GSD were
collected (u2_g4, u2_g8a,u2_g25, u2_g50, u2_g8b, u2_g8c).
Furthermore, twolarge-scale (u2_g4, u2_g8a) and two
small-scale(u2_g25, u2_g50) blocks were collected consecutivelyto
allow full system calibration, but unfortunately due tothe lack of
accurate GPS/IMU data, this part of thesystem calibration could not
be calculated. Three similarblocks were collected with an 8 cm GSD
to evaluatestability aspects.
The UC3 mission was performed in Sjkulla on 14May, 2005. The
aircraft used was a Piper Cheyenne 2with a pressurised cabin. The
flying speed wasapproximately 60 m/s and the system did not have
a
3.3. Methods
The images were processed with the image producersusing
UltraCamD Office Processing Centre software. 8-bit/channel
high-resolution RGB-images were used inthe geometric quality
analysis.
The image measurements for aerial triangulationwere performed by
several companies and with differentsoftware. The FGI measured the
UC1 and UC3 blocksand two UC2 blocks (u1_g4, u2_g25, u2_g50,
u3_g4)using Intergraph ISAT software. FM-Kartta Ltd mea-sured the
remaining four UC2 blocks (u2_g4, u2_g8a,u2_g8b, u2_g8c) using
Inpho MATCH-AT-software.The RC20-blocks were measured by the NLS
usingSocetSet and Orima. The blocks were analyzed at theFGI using
FGIAT and Inpho InBlock block adjustmentsoftware. All the
calculations were performed in thelocal tangential coordinate
system. A priori standarddeviations for the tie point observations
were set at 3 mand for the GCP observations X=Y=1 cm, Z=2 cmat
Sjkulla and X=Y=Z=2 cm at Jms.
391E. Honkavaara et al. / ISPRS Journal of Photogrammetry &
Remote Sensing 60 (2006) 387399stabilized mount. One block with a 4
cm GSD and acomprehensive structure was collected (u3_g4).
Three older analog image blocks taken by the NLSusing an RC20
were used as reference material (Table 1:r3300, r4000, r31000). The
large-scale blocks with acomprehensive structure were collected at
Sjkulla. Thesmall-scale block (r31000) with a cross block
structurewas collected at Jms.Fig. 1. Test block structures. GCPs
are marked wThe calibration processing was performed using
theprinciples presented in Section 2.2. GPS/IMU data werenot
available, so this part of the calibration could not beperformed.
It was assumed that the UltraCamD imageswere stable and distortion
free, and hence a single lensphysical distortion model was used
(see below).Residuals of image observations were examined
forsystematic behavior by calculating average residuals inith
triangles and checkpoints with squares.
-
ograma 1515 grid. All the GCPs and complete blocks wereused for
determining the system parameters. Theempirical accuracy of the
point determination andback-projection were investigated using some
of thetargeted points as GCPs (Jms: 9, Sjkulla: 12) and therest
were used as checkpoints (Jms: 10, Sjkulla: 2529). Sub-blocks
consisting of four parallel strips wereused for the geometric
accuracy assessment in the casesof comprehensive blocks (u2_g4,
u3_g4, r3300, r4000).
The well-known eight-parameter physical model wasused to model
the image distortions:
Dx Dx0x=cDc k1xr2 k2xr4 k3xr6 p1r2 2x2 2p2xy 1
Dy Dy0y=cDc k1yr2 k2yr4 k3yr6 2p1xy p2r2 2y2 2
The model includes corrections for the principaldistance (c),
principal point (x0, y0), radialdistortions (k1, k2, k3), and
decentering distortions(p1, p2); r
2 =x2 +y2; x and y are image coordinates withthe principal point
as the origin of the coordinatesystem. The principal distance could
not be evaluatedwith the test data. In some cases, the model
wassupplemented with in-plane corrections (x=b1x+b2y). It is well
known that correlations exist betweenmany of these parameters. The
most significant onesare the mutual correlation of the radial
distortionparameters and the correlation of the principal
pointcoordinates with the decentering distortion
parameters.Practical experience with analog photogrammetriccameras
and digital close range cameras has shownthat despite the
correlations, good parameter stabilitycan be obtained if the
interior orientation is stable(Frstner et al., 2004).
4. Results and discussion
4.1. Theoretical expectations
Kraus (1993, p. 284) gives the expected values forthe point
determination accuracy of targeted points innormal mapping blocks
(p=60%, q=20%) with addi-tional parameters. The expected height
accuracy is0.03 of the object distance and the expectedhorizontal
accuracy is 3 m in image space. Looseraccuracy expectations (5 m in
horizontal coordinatesand 0.05 of the object distance in height)
are alsooften considered to be reasonable (e.g. Drstel, 2003).
The FOVof the UltraCamD is significantly smaller in
392 E. Honkavaara et al. / ISPRS Journal of Photthe flying
direction than that of conventional framecameras. In practice, this
is seen as an inferior B/H-ratioand height accuracy. The difference
arising from usingthe rectangular image format of the UltraCamD
insteadof a square image format was evaluated with idealsimulated
data. The same area was covered both bysquare (103.5 mm103.5 mm)
and rectangular(103.5 mm67.5 mm) images; the focal length was100
mm. The block had four image strips and the scalewas 1:4000. The
length of the strips was fixed by 9square images with a 60% forward
overlap. 81 regularlydistributed tie points (99 grid) were
generated in eachimage (tie=2 m). Both block types had the same
13GCPs, which were created for the square block in thestrip overlap
areas with 4 base distances and at the blockcorners (GCP_X,Y=1 cm,
GCP_Z=2 cm). In somecalculations GPS and IMU observations were
alsoused (GPS=10 cm, =0.005, =0.008). Threedifferent overlap
configurations were used (p=q=60%;p=60%, q=20%; p=80%, q=20%). This
setup allowstheoretical evaluation of the deteriorating impact
ofrectangular image format in the block geometry, anddesign methods
to compensate for this effect.
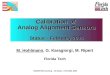
Standard deviations of point and orientation un-knowns (Fig. 2)
were used to evaluate various blockconfigurations. The analysis
concentrated on the rectan-gular image format; only a few results
for the squareformat are given for reference. The rectangular
imageformat yielded poorer accuracy than the square format.This was
especially apparent in the orientationunknowns and the height
component of the pointunknowns. The difference in accuracy of the
twoimage formats was greatest in the case of the blockwith 20% side
overlap and no GPS/IMU support (forinstance, the square block had
40% better object heightaccuracy). The use of 80% forward overlap
improved theaccuracy of all the unknowns. When GPS/IMU supportwas
used, the rectangular and square blocks gave almostthe same
orientation accuracy, but the square block had30% better object
height accuracy. In the case of therectangular image format, the
horizontal accuracy wastypically approx. 2 m in image space and the
heightaccuracy was 0.050.1 of the object distance.
4.2. General results
The 0 values were 1.32.6 m (Table 2). Theexpected value is 2 m
or less; blocks u1_g4 andu2_g25 exceeded this value. Additional
parameters(x0, y0, k1, k2, k3, p1, p2; Section 3.3) had
differenteffects on the object and image residuals. The use
ofadditional parameters improved the RMSEs of image
metry & Remote Sensing 60 (2006) 387399residuals by only
48%. Instead, the use of additional
-
the case of UC2, the correction for x0 (flying direction)was
approx. 65 m in the 4 cm GSD flight, 4055 m inthe 8 cm GSD flights,
and approx. 35 m in the 25 and50 cm flights. Similar values were
obtained fromconsecutive calibrations; the flying height appeared
tohave only a slight effect on the values.
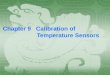
The effects of radial and decentering parameters areshown in
Fig. 3 and the maximum corrections areprovided in Table 2. The
symmetric radial and thedecentering distortions were significant
for all threecameras. Corrections in two of the consecutively
flownblocks (u2_g4 and u2_g8a and u2_g8b and u2_g8c)were similar.
In addition, the corrections of u2_g8a andu2_g8c were similar. The
maximum values were 4
393ogrammetry & Remote Sensing 60 (2006) 387399E. Honkavaara
et al. / ISPRS Journal of Photparameters (especially radial
corrections) affected theheight residuals of GCPs in many blocks.
The largestheight improvements (>50%) appeared in the UC3block
(u3_g4) and UC2 blocks with 4 cm, 25 cm and50 cm GSD (u2_g4, u2_g25
and u2_g50). Improve-ments in horizontal components were smaller,
typicallyless than 10%. Free network adjustments wereperformed in
order to ensure that the GCPs did notcause the behavior; additional
parameters similar tothose in the constrained adjustment were
obtained.
4.3. Calibration parameters
Principal point corrections are shown in Table 2.Fairly large
values were obtained for UC1 and UC2. In
14 m (Table 2). Corrections were the largest in theblocks u1_g4
and u2_g8b.
Fig. 2. Simulation results on comparison of rectangular and
squareimage formats (FOV in the flying direction: square: 55,
UltraCamD:37). Accuracy of point determination, perspective centres
androtations. (uc = UltraCamD; sq: square; g: GPS; i: IMU; A:
p=80%,q=20%; B: p=60%, q=20%; C: p=q=60%).The correlations of the
additional parameters werediscussed in Section 3.3. The
significance of theparameters and the similarity of the corrections
inseveral blocks indicated good determinability; this resultis
consistent with the expectations.
4.4. Systematic image errors
Plots of image residuals (average residuals of thecells in the
1515 grid) for the three cameras are shownin Fig. 4. The nine
separate CCD arrays can be visuallydetected from the residual
plots. It appeared that thesystematics of the residuals of UC1 were
larger thanthose of the other two cameras. The use of physicalimage
deformation parameters did not significantlydecrease the
systematics of the residuals. The reason forthis is that the
applied additional parameters did notmodel the existing errors
correctly.
Table 2Test field calibration of UltraCamD: 0: standard error of
unit weight,PP: principal point corrections, PP stdev: standard
deviation of PP,Max Cor: maximum corrections of radial and
decentering parameters(Fig. 3), Max Sys: maximum systematic error
at vector plots (Figs. 4and 5)
Block 0[m]
PP [m] PP stdev[m]
Max. [m]
dx0 dy0 dx0 dy0 Cor. Sys.
u1_g4 2.6 29.4 47.6 4.1 4.2 14.3 4.5u2_g4 1.9 63.8 10.3 2.3 2.6
7.1 2.2u2_g8a 1.4 42.0 23.5 3.0 3.1 7.7 2.4u2_g25 2.3 34.2 1.2 3.8
4.0 4.8 1.7u2_g50 1.8 34.5 1.4 4.6 5.1 7.3 1.7u2_g8b 2.0 48.7 12.7
4.6 4.9 10.0 4.0u2_g8c 1.5 52.7 29.0 4.0 4.2 4.6 2.6
u3_g4 1.8 4.5 7.2 2.8 3.0 4.2 4.1
-
394 E. Honkavaara et al. / ISPRS Journal of Photogrammetry &
Remote Sensing 60 (2006) 387399Fig. 5 shows the residual plots of 6
blocks collectedwith UC2. The systematics were clearly smaller in
theblocks collected on the first day than in those collectedon the
second day. The poor illumination conditionsduring the collection
of blocks u2_g25 and u2_g50resulted in the absence of tie points in
the image borders(Section 3.2). The correlation of the vector plots
wasevaluated by calculating correlation coefficients in the xand y
directions. On the basis of both the numbers andthe visual
analysis, it could be concluded that thesystematics of the
consecutively flown image blocks
Fig. 4. Plots of average image observation residuals
Fig. 3. Effects of test field calibrated radial and decentring
disto(u2_g4 and u2_g8a, u2_g25 and u2_g50, u2_g8b andu2_g8c) were
significantly correlated (correlation coef-ficients >0.5). In
addition, the 8 cm blocks collected onOctober 14 and October 15
(u2_g8a and u2_g8c) had asignificant correlation coefficient of
0.60.7.
The evaluation showed that the UltraCamD hadsystematic errors
caused by the special compositestructure of the images. The use of
the single-lensadditional parameter model is not sufficient for
this typeof images. This is an important topic for future
researchand development work.
in 1515 grid for three UltraCamD cameras.
rtion parameters in image coordinates on various blocks.
-
515
395E. Honkavaara et al. / ISPRS Journal of Photogrammetry &
Remote Sensing 60 (2006) 3873994.5. Geometric accuracy
assessment
Fig. 5. Plots of average image observation residuals in 14.5.1.
Accuracy of point determinationThe accuracy of point determination
is shown in
Table 3 and Fig. 6. The results from adjustments
withoutadditional parameters are shown for all blocks. Theresults
of adjustments with additional parameters areshown if their use
significantly improved the accuracy.Theoretical values (RMSEs of
standard deviations of
Table 3Point determination statistics (: additional parameters
were used)
Block Theoretical [cm] Empirical [cm]
RMSE RMSE
X Y Z X Y Z
u1_g4 1.3 1.3 4.6 2.5 2.1 7.9u2_g4 0.9 0.6 2.9 1.1 1.5 6.9u2_g4
0.6 0.5 2.2 0.9 1.3 4.1u3_g4 0.7 0.6 2.2 1.2 1.2 7.2u3_g4 0.7 0.6
2.6 1.0 1.0 2.1u2_g8a 0.9 0.8 3.6 1.0 2.1 5.8u2_g8b 1.1 1.2 4.5 3.1
1.7 5.9u2_g8c 0.8 1.0 4.3 3.1 1.7 6.8u2_g50 9.6 9.0 39.7 8.4 7.4
76.3u2_g50 9.2 8.7 38.7 8.9 7.7 29.0r3300 1.5 1.2 3.7 1.2 1.2
3.1r4000 1.4 1.4 3.0 1.0 1.1 1.9r31000 23.1 22.3 56.3 10.8 6.8
19.3point unknowns) and empirical values (RMSE, standard
grid for one UltraCamD with 6 repetitive calibrations.deviation
and average) are given.All three cameraswere testedwith aGSDof 4
cm. The
performance of the cameras was different. The previousanalysis
has indicated that the UC1 had geometricproblems. This was also
apparent in the point determi-nation accuracy; the empirical
horizontal RMSE wasapprox. 2 cm (5 m in image) and the empirical
heightRMSE was approx. 8 cm (0.18 of H). Additional
Stdev Average
X Y Z X Y Z
2.5 2.0 7.5 0.3 0.5 2.91.1 1.2 5.4 0.3 0.9 4.40.9 1.1 3.5 0.1
0.8 2.31.2 1.2 6.0 0.3 0.3 4.11.0 1.0 2.2 0.2 0.3 0.01.1 1.4 4.7
0.1 1.6 3.51.8 1.7 6.0 2.5 0.4 0.82.0 1.8 6.8 2.4 0.1 1.48.2 7.5
63.0 3.2 2.2 47.48.3 7.9 27.1 4.1 1.4 13.51.2 1.1 2.7 0.0 0.4
1.51.0 1.1 2.0 0.2 0.3 0.110.5 7.2 20.0 4.3 0.8 3.1
-
ogram396 E. Honkavaara et al. / ISPRS Journal of Photparameters
did not affect the results for UC1, but with theother two cameras
the use of radial and decenteringcorrections significantly improved
the height accuracy (asimilar performance was also observed in the
analysis ofheight residuals of GCPs; Section 4.2). The
empiricalhorizontal RMSE of the UC2 and UC3 blocks wasapprox. 11.5
cm (23 m in image space). At its best,the empirical height RMSE of
UC2 was approx. 4 cm(0.09 of H) and of UC3 approx. 2 cm (0.05 of
H)when additional parameters were applied.
The accuracy of three blocks with an 8 cm GSD wasfairly similar.
The empirical horizontal RMSE wasapprox. 13 cm (13 m in image
space) and theempirical height RMSE was approx. 67 cm (0.060.08 of
H). Additional parameters did not affect theresults
significantly.
Fig. 6. Empirical point determination RMSE for X, Y and
Z.Horizontal accuracy scaled to image. Height accuracy in of
theobject distance (H) (Theor.: theoretical value, no: no
additionalparameters, add: additional parameters).The empirical
horizontal RMSE of the block with50 cm GSD was less than 10 cm (1.5
m in imagespace). The empirical height RMSE was 75 cm(0.13 of H) if
additional parameters were not usedand 30 cm (0.05 of H) if
additional parameters wereused.
Theoretical expectations for the point determinationaccuracy of
the block types used were 12 m forhorizontal coordinates in the
image and 0.040.06 ofthe object distance in height (Fig. 6). In two
of thecameras tested, the empirical point determination RMSEwas 13
m in the image in horizontal coordinates and0.050.09 of the object
distance in height when themost appropriate geometric model was
used. TheRMSEs of the third camera were almost twice aslarge. The
empirical RMSEs were worse than thetheoretical RMSEs, but the
empirical standard deviations(Table 3) were in many cases closer to
the theoreticalvalues; this indicates the presence of systematic
blockdeformations.
The studies were performed using GSDs of 4 cm,8 cm and 50 cm.
The accuracy of point determination forvarious GSDs was fairly
consistent. Consistent resultswere obtained even with a high-speed
aircraft flying atlow altitude.
4.5.2. Back projection accuracyBack projection accuracy was
evaluated by calculat-
ing the image coordinates of checkpoints and comparingthese
values with the measured values. With this methodit is possible to
evaluate the potential of UltraCamDimages in orthophoto production,
for instance. Blockswith a 4 cm GSD (u1_g4, u2_g4 and u3_g4)
wereevaluated.
Additional parameters affected the results. If addi-tional
parameters were not used, the 2D back projectionRMSE was approx. 8
m (in image space). Whenadditional parameters were used, the RMSE
of UC2 andUC3 was 5 m (in image space); the RMSE of UC1 was7 m (in
image space). All cases were appropriate fororthophoto
production.
4.6. Stability
The stability of UC2 was evaluated by comparing thecalibration
parameters (Section 4.3), the systematicerrors (Section 4.4) and
the empirical accuracy (Section4.5). The calibration parameters and
systematic imageerrors of consecutively flown blocks that had
differentGSDs were correlated. This means that the system canbe
insensitive to flying height. Blocks with an 8 cm
metry & Remote Sensing 60 (2006) 387399GSD flown on
different days also showed similar
-
ogrambehavior. However, the principal distance performancecould
not be evaluated in this study. It is also possiblethat the use of
incorrect mathematical models couldhave affected the results. After
developing appropriatemodels, it is necessary to repeat the
stability analysis.The most extensive data available to perform
thisanalysis are mapping blocks collected by mappingcompanies. If
the sensor is not geometrically stable, itsuse in DG is
questionable. This topic needs further studyusing GPS/IMU
observations.
4.7. Comparison with the analog camera
Point determination accuracy statistics for threeRC20 blocks are
given in Table 3. The performance ofthe cameras was stable. The
empirical horizontal RMSEwas approx. 24 m in image space and the
empiricalheight RMSE was 0.020.04 of the objectdistance. This means
a horizontal accuracy of 1 cmand a height accuracy of 23 cm for the
large-scaleblocks and a horizontal accuracy of 10 cm and a
heightaccuracy of 20 cm for the small-scale block. The use
ofadditional parameters did not significantly affect theaccuracy of
the RC20 blocks. These results prove thequality of the test fields
and the stability of the standardframe camera.
On the basis of the results presented, the importantdesign
principle of the UltraCamD can be evaluated,i.e. whether the
UltraCamD is geometrically as goodas an analog camera. The FOV of
the UltraCamD inthe cross-flight direction corresponds with that of
afilm camera with a focal length of 210 mm. In flightdirection the
FOV is smaller, which reduces the heightaccuracy (Section 4.1).
With regard to technicaltesting alone (point determination accuracy
withtargeted points), the analog camera yielded betterresults than
the UltraCamD: a similar or a better pointdetermination accuracy
was obtained with the analogcameras (Table 3) even though their
swaths wereconsiderably wider (Table 1). The radiometric qualityof
the UltraCamD, however, is superior to that of theanalog camera,
and these radiometric properties willalso improve the geometric
results from the Ultra-CamD e.g. in DEM generation, measurement of
lowcontrast objects, and stereo mapping. This is animportant issue
that must be taken into account inpractical studies. The
improvement of self-calibrationmodels can also change the situation
(Section 4.8).
The results indicated that the UltraCamD couldreplace analog
cameras. However, for the systems andmethods used, it is advisable
to check the results
E. Honkavaara et al. / ISPRS Journal of Photcarefully if
accuracy requirements are high (e.g. betterthan 5 m in horizontal
coordinates (in the image) and0.15 of the object distance).
4.8. Treatment of the multi-head distortions
Based on the results it is clear that multi-headparameters are
needed for the highest accuracy. Anexperiment was performed by
implementing a multi-head option to the FGIAT software of the FGI;
thephysical parameters supplemented with in-plane distor-tions
(Section 3.3) were calculated for each of the fourpanchromatic
camera heads. The adjustments wereperformed with 4 and 8 cm blocks.
The results withthe multi-head parameters were in general slightly
betterthan results with the single-head parameters. The
mostremarkable improvement was obtained with the prob-lematic
camera UC1 (block u1_g4). With this block thepoint determination
RMSEs with multi-head parameterswere 1.7 cm in horizontal
coordinates (4.0 m in imagespace) and 3.8 cm in height (0.08H);
this result isalmost as good as the results of the other two
cameras.Analysis of the image residuals showed that thesystematic
errors of image residuals had decreased,but not completely
disappeared. The results showed thatan improvement could be gained
with multi-headparameters. In the tested model there were
highcorrelations between many parameters (e.g. correlationsbetween
the 4 sets of radial distortion parameters), so thedevelopment of a
better model is necessary; this issue,however goes beyond the scope
of this article. In orderto develop an optimal model, detailed
information onthe camera's construction is necessary;
unfortunatelysuch information is typically considered a
businesssecret.
The most convenient way to deal with deforma-tions would be to
perform the self-calibrating bundleblock adjustment with an
appropriate sensor modeland correct the distortions in the
UltraCamD post-processing software. With this approach the
post-processed images would be distortion free and thecomplicated
distortion processing could be eliminatedfrom the subsequent parts
of the production line. Asimilar approach is already used with
pushbroomsensors (Fricker, 2001). Another approach, i.e.
imple-menting and maintaining the multi-head parametersfor each
multi-head sensor type and in all blockadjustment software, is
difficult and time-consuming.Furthermore, when dealing with the
determinedcorrections, e.g. performing another resampling, useof
the determined parameters directly or use of look-up tables
complicates or even distorts the data
397metry & Remote Sensing 60 (2006) 387399processing.
-
ogram5. Conclusions
This study developed a method for geometricallycalibrating any
type of airborne camera in a test field. Tobe fully operational,
exact specifications and tolerancesmust be determined for the
various components of themethod. Rigorous empirical investigations
with variouscamera types, the development of appropriate
sensormodels, support of camera manufacturers and interna-tional
co-operation are necessary to complete thesetasks.
Future experiments will show the role of the test
fieldcalibration. At the moment, it seems that
calibrationprocessing of digital photogrammetric systems
willinvolve component calibration in a laboratory, fieldcalibration
in a test field and self-calibration of everyimage block. The
difference to the current practises isthat the role of the field
calibration is going to be moreimportant. Probably the most
important function of thetest field calibration will be to test and
validate thesystems. The degree to which the parameters
determinedin the test field can be used in further processes
isdependent on the stability of the systems. This is oneimportant
topic for future research. The test fieldcalibration is
particularly important in the context ofdirect georeferencing.
Eight image blocks collected with the three Ultra-CamD digital
photogrammetric cameras were geomet-rically calibrated and tested
with the method. Somesystematic errors appeared and distorted the
results;future studies will show whether these problems can
becompletely offset by using more appropriate geometricmodels. It
appeared that a multi-head additionalparameter model would be
necessary for the highestaccuracy; the determination of appropriate
models is animportant topic for future research. It was concluded
thatthe most convenient approach would be to determineand correct
the multi-head distortions in the image post-processing software.
Two of the tested cameras showedgood results; one of the cameras
appeared to haveserious geometric problems.
To conclude, the results show that the geometricperformance of
the first generation UltraCamD cameraswas surprisingly good.
Typical empirical point determi-nation accuracy values were 23 m in
horizontalcoordinates in the image space and 0.050.09 of theobject
distance in height. Since the insufficiency of themathematical
modeling particularly affected the heightcomponent, some
improvement in the height accuracy ispossible. The empirical
results were worse than thetheoretical results, which also
indicated the presence of
398 E. Honkavaara et al. / ISPRS Journal of Photuncompensated
systematic errors in image coordinates.It must be borne in mind
that the test field calibrationshows the performance of the entire
image productionline, so some of the errors detected can be
assigned tothe other components of the system. This is oneimportant
property of field calibration and testing; italso teaches image
producers how to use the systemsand points out the weak links in
the production line.
Acknowledgements
The authors are grateful to Finnmap Ltd, FM-KarttaLtd, Geotec
Vermessungsgesellschaft mbH, MeixnerConsulting Engineers, and the
National Land Survey ofFinland for their contribution in acquiring
the imagedata, for performing a large proportion of the
imagemeasurements, and for giving valuable commentsconcerning the
test setup and results. The assistance ofseveral individuals at the
FGI is particularly appreciated.
The roles played by of the authors in the study wereas follows:
Eija Honkavaara (test design, testing,analysis); Eero Ahokas, Harri
Kaartinen, KimmoNurminen (field surveys); Lauri Markelin (field
surveys,image processing); Juha Hyypp and Risto Kuittinen(general
guidance); Juha Jaakkola (discussions, assis-tance in
graphics).
References
Ahokas, E., Kuittinen, R., Jaakkola, J., 2000. A system to
control thespatial quality of analogue and digital aerial images.
InternationalArchives of Photogrammetry and Remote Sensing 33 (Part
B4),4552.
Alhamlan, S., Mills, J.P., Walker, A.S., Saks, T., 2004. The
influenceof ground control points in the triangulation of Leica
ADS40 Data.International Archives of Photogrammetry Remote Sensing
andSpatial Information Sciences 35 (Part B1), 495500.
Cramer, M., 2004. EuroSDR network on digital camera
calibration.Report Phase I (Status Oct 26, 2004).
http://www.ifp.uni-stuttgart.de/eurosdr/EuroSDR-Phase1-Report.pdf
(accessed March 31,2006).
Cramer, M., 2005. Digital airborne cameras status and
future.Proceedings of ISPRS Hannover Workshop 2005: High-Resolution
Earth Imaging for Geospatial Information. 8 p., onCD-ROM.
Cramer, M., Stallman, D., 2002. System calibration for
directgeoreferencing. International Archives of the
Photogrammetry,Remote Sensing and Spatial Information Sciences 34
(Part 3A),7984.
Drstel, C., 2003. DMC practical experiences and
photogrammetricsystem performance. In: Fritsch (Ed.),
Photogrammetric Week2003. Wichmann Verlag, pp. 5965.
Eisenhart, C., 1963. Realistic evaluation of the precision and
accuracyof instrument calibration systems. Journal of Research,
NationalBureau of Standards 67C (2).
Frstner, W., Wrobel, B., Paderes, F., Craig, R., Fraser, C.,
Dolloff, J.,
metry & Remote Sensing 60 (2006) 3873992004. In: McGlone,
J.C., Mikhail, E., Bethel, J. (Eds.), Analyticalphotogrammetric
operations, ASPRS Manual of Photogrammetry,
-
5th edition. American Society for Photogrammetry and
RemoteSensing, pp. 763936.
Fricker, P., 2001. ADS40 progress in digital aerial data
collection.In: Fritsch, D., Spiller, R. (Eds.), Photogrammetric
Week 2001.Wichmann Verlag, pp. 6776.
Heipke, C., Jacobsen, K., Wegmann, H., 2002. Analysis of the
Resultsof the OEEPE Test Integrated Sensor Orientation. In: Heipke,
C.,Jacobsen, K., Wegmann, H. (Eds.), OEEPE Official
Publication,vol. 43, pp. 3149.
Honkavaara, E., 2004. In-flight camera calibration for
directgeoreferencing. International Archives of Photogrammetry,
Re-mote Sensing and Spatial Information Sciences 35 (Part
B1),166171.
Honkavaara, E., Ilves, R., Jaakkola, J., 2003. Practical results
of GPS/IMU/Camera-system calibration. Proceedings of
InternationalWorkshop: Theory, Technology and Realities of
Inertial/GPSSensor Orientation, Castelldefels, Spain, 22.23.9.2003,
10 pp.CD-ROM.
Honkavaara, E., Markelin, L., Ilves, R., Savolainen, P.,
Vilhomaa, J.,Ahokas, E., Jaakkola, J., Kaartinen, H. 2005.
In-flight perfor-mance evaluation of digital photogrammetric
sensors. Proceed-ings of ISPRS Hannover Workshop, 1720 May 2005. 6
pp., onCD-ROM.
Jacobsen, K., 2004. Direct integrated sensor orientation pros
andcons. International Archives of Photogrammetry, Remote
Sensingand Spatial Information Sciences 35 (Part B3), 829835.
Kraus, K., 1993. Photogrammetry, Volume 1: Fundamentals
andStandard Processes. ISBN: 3-427-78684-6.
Kremer, J., Gruber, M., 2004. Operation of UltraCamD together
withCCNS/Aerocontrol first experiences and results.
InternationalArchives of Photogrammetry, Remote Sensing and
SpatialInformation Sciences 35 (Part B1), 172177.
Krpfl, M., Kruck, E., Gruber, M., 2004. Geometric calibration of
thedigital large format camera UltraCamD. International Archives
ofPhotogrammetry, Remote Sensing and Spatial InformationSciences 35
(Part B1), 4244.
Kuittinen, R., Ahokas, E., Hgholen, A., Laaksonen, J., 1994.
Test-field for aerial photography. The Photogrammetric Journal
ofFinland 14 (1), 5362.
Leberl, F., Gruber, M., 2003. Flying the new large format
digital aerialcamera Ultracam. In: Fritsch (Ed.), Photogrammetric
Week 2003.Wichmann Verlag, pp. 6776.
Livingston, R.G., Berndsen, C.E., Ondrejka, R., Spriggs,
R.M.,Kosofsky, L.J., Van Steenbrugh, D., Norton, C., Brown, D.,
1980.Chapter 4.8: Camera Calibration, In: Slama, C.C., Theurer,
C.,Henriksen, S.W. (Eds.), Manual of Photogrammetry, FourthEdition.
American Society of Photogrammetry and RemoteSensing, pp.
232277.
Merchant, D.C., Schenk, A., Habib, A., Yoon, T., 2004.
USGS/OSUprogress with digital camera in situ calibration
methods.International Archives of Photogrammetry Remote Sensing
andSpatial Information Sciences, vol. 35 (Part B2), pp. 1924.
Petrie, G., 2003. Airborne digital frame cameras. Geoinformatics
7 (6),1827.
Petrie, G., 2005. Airborne pushbroom line scanners.
Geoinformatics 1(8), 5057.
399E. Honkavaara et al. / ISPRS Journal of Photogrammetry &
Remote Sensing 60 (2006) 387399
Geometric test field calibration of digital photogrammetric
sensorsIntroductionCalibration methodOutline of the methodThe
quantities to be determinedCalibration blockGeometric test
field
Materials and methodsUltraCamDFlight missionsMethods
Results and discussionTheoretical expectationsGeneral
resultsCalibration parametersSystematic image errorsGeometric
accuracy assessmentAccuracy of point determinationBack projection
accuracy
StabilityComparison with the analog cameraTreatment of the
multi-head distortions
ConclusionsAcknowledgementsReferences