Embed Size (px)
Citation preview

BUILDING MODEL RECONSTRUCTION FROM LIDAR DATA AND AERIAL PHOTOGRAPHS
DISSERTATION
Presented in Partial Fulfillment of the Requirements for
The Degree Doctor of Philosophy in the Graduate
School of the Ohio State University
By
Ruijin Ma *****
The Ohio State University
2004
Dissertation Committee:
Approved by Rongxing Li, Advisor Alan Saalfeld
_________________________________ Raul Ramirez Advisor
Graduate Program of Geodetic Science

© Copyright by
Ruijin Ma
2004
ABSTRACT
The objective of this research is to reconstruct 3D building models from imagery and
LIDAR data. The images used are stereo aerial photographs with known imaging
orientation parameters so that 3D ground coordinates can be calculated from conjugate
points; and 3D ground objects can be projected to image spaces. To achieve this
objective, a method of synthesizing both imagery data and LIDAR data is explored; thus,
the advantages of both data sets are utilized to derive 3D building models with a high
accuracy. In order to reconstruct complex building models, the polyhedral building model
is employed in this research. Correspondingly, the reconstruction method is a data-driven
oriented.
The general research procedure can be summarized as: a) building detection from
LIDAR data; b) 3D building model reconstruction; c) LIDAR data and imagery data co-
registration; and d) building model refinement. The main role of aerial image data in this
research is to improve the geometric accuracy of a building model.
The major contributions of this research lie in four aspects: 1) Two algorithms are
developed to perform LIDAR segmentation. Compared with the algorithms proposed by
other researchers, these two algorithms work well in urban and suburban areas. In
addition, they can keep fine features on the ground; 2) An algorithm of building boundary
ii

regularization is proposed in this study. Compared with the commonly used MDL
algorithm, it is simple to implement and fast in computation. Longer line segments have
larger weights in its adjustment process. This agrees with the fact that longer line
segments have more accurate azimuths provided that the accuracy of ending points are
the same for all segments; 3) A new method of 3D building model reconstruction from
LIDAR data is developed. It is comprised of constructing surface topology, calculating
corners from surface intersection, and ordering points of a roof surface in their correct
sequence; and 4) A new framework of building model refinement from aerial imagery
data is proposed. It refines building models in a consistent approach; and it utilized stereo
imagery information and roof constraints in deriving refined building models.
iii

Dedicated to my parents
iv
ACKNOWLEDGMENTS First of all, I would like to express my gratitude to my advisor, Dr. Ron Li, for his
support, patience, and encouragement throughout my graduate studies. Many
opportunities he gave me to practice have stimulated many of my interests and enabled
me to gain more experiences in my research field.
I am especially grateful to Dr. Raul Ramirez for his kind and all-aspect help. His
unreserved kindness has made the past years an ever-good memory in my life. His
supervision and continuous supports laid a smooth way for my studies and research work.
Special thanks also go to Dr. Alan Saalfeld. While serving on my dissertation
committee, he offered many constructive comments and suggestions. In addition, I
benefited enormously from taking his classes.
I am greatly thankful to Mr. Qian Xiao at Woolpert Inc. and Mr. Will Meyer in Harris
County, Texas, for their helps in providing experimental data for my research.
I wish to express my sincere appreciation to Dr. Kaichang Di. His comments and
suggestions to my dissertation are valuable. My gratitude should be extended to Dr. Tarig
Ali. Our friendship has led to many interesting and good-spirited discussions relating to
this research.
v
I also deeply appreciate my colleagues and friends both in GIS and Mapping Lab and
in Center for Mapping: Fengliang Xu, Xutong Niu, Dr. Mingjuan Huang, Dr. Lawrence
Spencer, Jue Wang, Leslie Smith, and many others.
Finally, I want to express my deep gratitude to my friend, Fang Ren, for her
emotional encouragement and support, and to my parents for their dedication and so
many years of support during my studies.
vi
VITA
April 27, 1974 . . . . . . . . . . . . . . . . . . . . . . . Born – Gaomi, Shandong Province, China
July 1996 . . . . . . . . . . . . . . . . . . . . . . . . . . . BS, Survey Engineering, Shandong
University of Science and Technology
June 1999. . . . . . . . . . . . . . . . . . . . . . . . . . . MS, Survey Engineering, Shandong
University of Science and Technology
August 2001. . . . . . . . . . . . . . . . . . . . . . . . . MS, Mapping and GIS The Ohio State
University
1999 – 2004. . . . . . . . . . . . . . . . . . . . . . . . . Research Assistant at The Ohio State
University
2004 – present. . . . . . . . . . . . . . . . . . . . . . . . Lecturer at SUNY Alfred
PUBLICATIONS
Research Publications
1. Di, K., R. Ma and R. Li, “Geometric Processing of IKONOS Stereo Imagery for
Coastal Mapping Application”, Journal of Photogrammetric Engineering & Remote
Sensing. Vol. 69 (8), pp. 873-879 (2003)
2. R. Li, K. Di and R. Ma, “3-D Shoreline Extraction from IKONOS Satellite
Imagery”, The 4th Special Issue on C&MGIS, Journal of Marine Geodesy. Vol. 26 (1/2),
pp.107-115 (2003) vii
3. Di, K., R. Ma and R. Li, “Rational Functions and Potential for Rigorous Sensor
Model Recovery”, Journal of Photogrammetric Engineering & Remote Sensing Vol. 69
(1), pp. 33-44 (2003)
4. Li, R., R. Ma and K. Di, “Digital Tide-Coordinated Shoreline”, Journal of
Marine Geodesy, Vol. 25, pp. 27-36 (2002)
FIELDS OF STUDY
Major Field: Geodetic Science Studies in:
GIS Mapping Photogrammetry and Remote Sensing
viii

TABLE OF CONTENTS
Abstract ...............................................................................................................................ii
Dedication ..........................................................................................................................iv
Acknowledgments...............................................................................................................v
Vita....................................................................................................................................vii
List of Figures ....................................................................................................................xi
List of Tables ...................................................................................................................xiv
Chapters:
1. Introduction and Problem Statement.............................................................................. 1
1.1 Motivation .........................................……………................................................ 1 1.2 Building Model and Model Reconstruction........................................................... 3 1.3 Peer research.......................................................................................................... 6
1.3.1 Reconstruction from LIDAR Data................................................................ 6 1.3.2 Reconstruction from Imagery Data............................................................. 10 1.3.3 Reconstruction from LIDAR, Imagery, and Other Auxiliary Data............. 16
1.4 Statement of Problem............................................................................................19 1.5 Research focus and Methodology.........................................................................22 1.6 Fundamental Concepts......................................................................................... 23
1.6.1 LIDAR vs. Photogrammetry....................................................................... 24 1.6.2 DTM vs. DSM............................................................................................. 28 1.6.3 Building Detection and Building Reconstruction........................................29
1.7 Dissertation Organization......................................................................................29
2. Building Detection From LIDAR Data......................................................................... 31
2.1 Conventional Terms............................................................................................. 33 2.2 DTM and DSM Generation.................................................................................. 34
2.2.1 Transformation from Point to Grid............................................................. 35
ix2.2.2 LIDAR Data Segmentation......................................................................... 37

2.2.2.1 Morphology Segmentation................................................................. 42 2.2.2.2 Planar-fitting Segmentation............................................................... 45 2.2.2.3 Height-jump Segmentation................................................................ 51
2.2.3 Comparison................................................................................................. 57 2.3 Building Detection from Normalized DSM......................................................... 59 2.4 Analysis and Conclusion...................................................................................... 65
3. Building Model Reconstruction.................................................................................... 67
3.1 Conventional Terms............................................................................................. 67 3.2 Boundary Extraction and Regularization.............................................................. 68
3.2.1 Line Simplification...................................................................................... 70 3.2.2 Boundary Regularization............................................................................. 75
3.3 Building Model Reconstruction............................................................................ 80 3.3.1 Roof Detection and Reconstruction............................................................ 84
3.3.1.1 Mean-shift Algorithm......................................................................... 86 3.3.1.2 Roof Reconstruction........................................................................... 93
3.3.2 Model Reconstruction................................................................................. 99
4. Building Model Refinement....................................................................................... 110
4.1 Co-registration of LIDAR and Aerial Photograph............................................. 112 4.1.1 3D Lines from LIDAR Data and 2D Edges from Photograph.................. 114 4.1.2 Image Resection from Linear Features...................................................... 115
4.2 Line Refinement in 2D Image Space.................................................................. 122 4.3 Reconstruct 3D Building Models with Refined Geometry................................. 128 4.4 Implementation................................................................................................... 133
5. Experiments and Results............................................................................................. 135
5.1 Data..................................................................................................................... 135 5.2 LIDAR Segmentation......................................................................................... 136 5.3 Building Reconstruction..................................................................................... 142 5.4 Building Model Refinement from Data Integration........................................... 147 5.5 Discussion........................................................................................................... 149
6. Conclusions and Future Research............................................................................... 152
6.1 Conclusions........................................................................................................ 152 6.2 Future Works...................................................................................................... 154
Bibliography................................................................................................................... 156
x
LIST OF FIGURES
Figure 1.1 Aerial photograph image geometry................................................................. 24
Figure 1.2 Stereo images and space intersection.............................................................. 25
Figure 1.3 Imaging geometry of a LIDAR system........................................................... 26
Figure 1.4 LIDAR height and reflectance data................................................................. 27
Figure 1.5 DTM and DSM................................................................................................ 28
Figure 2.1 Flowchart of DTM generation and building detection from LIDAR data...... 32
Figure 2.2 Conversion from points to grid........................................................................ 35
Figure 2.3 View of DSM from LIDAR data..................................................................... 37
Figure 2.4 A profile of LIDAR DSM............................................................................... 39
Figure 2.5 Morphology filter results................................................................................. 44
Figure 2.6 3D visualization of DTM and NDSM............................................................. 44
Figure 2.7 Flowchart of DTM generation from plane-fitting segmentation..................... 46
Figure 2.8 Planar surface conditions in classification...................................................... 48
Figure 2.9 Planar-fitting results........................................................................................ 49
Figure 2.10 3D visualization of planar-fitting DTM and NDSM..................................... 51
Figure 2.11 Flowchart of DTM generation from height-jump segmentation................... 52
Figure 2.12 Object height and topographical difference.................................................. 54
Figure 2.13 Height-jump segmentation results................................................................. 55
Figure 2.14 3D visualization of height-jump DTM and NDSM....................................... 56
Figure 2.15 Objects detected from height constraint........................................................ 60
Figure 2.16 Buildings detected from size constraint........................................................ 62
Figure 2.17 Separating buildings and trees from planar-fitting difference....................... 65
Figure 3.1 Extracted building boundaries......................................................................... 70
Figure 3.2 Line simplification using “sleeve” algorithm.................................................. 71
Figure 3.3 Line simplification using refined “sleeve” algorithm..................................... 74
Figure 3.4 An example of line simplification................................................................... 75
xi

Figure 3.5 Flowchart of boundary regularization............................................................. 76
Figure 3.6 An example of boundary regularization.......................................................... 79
Figure 3.7 Regularized building boundaries with DSM................................................... 79
Figure 3.8 Slope, aspect, and normal derived from DSM................................................ 85
Figure 3.9 Normal divergences in level surface............................................................... 85
Figure 3.10 Mean-shift in one dimension domain............................................................ 90
Figure 3.11 Feature space before applying mean-shift filtering....................................... 92
Figure 3.12 Feature space after applying mean-shift filtering.......................................... 92
Figure 3.13 Normal data calculated using different windows.......................................... 94
Figure 3.14 Normal data before and after applying mean-shift filtering.......................... 95
Figure 3.15 3D visualization of the X component from mean-shift filtering................... 96
Figure 3.16 Roof classification and extraction................................................................. 97
Figure 3.17 Point-in-polygon analysis.............................................................................. 98
Figure 3.18 Construct roofs and building boundary topology........................................ 100
Figure 3.19 Numbering roofs and vertical walls............................................................ 101
Figure 3.20 Reconstructed building corners................................................................... 105
Figure 3.21 Ordering roof polygon points...................................................................... 107
Figure 3.22 An example of reconstructed surface topology........................................... 109
Figure 3.23 An example of reconstructed 3D building model........................................ 109
Figure 4.1 Updating 2D lines in stereo images............................................................... 111
Figure 4.2 Co-registration of LIDAR and aerial images................................................ 113
Figure 4.3 Co-planarity of 2D and 3D line..................................................................... 115
Figure 4.4 A projected building model onto stereo images............................................ 123
Figure 4.5 Building image and detected edge pixels...................................................... 124
Figure 4.6 Detected pixels for line refinement............................................................... 126
Figure 4.7 Searching pixels and refined 2D line segments............................................. 128
Figure 5.1 Experimental data.......................................................................................... 136
Figure 5.2 The ground region detected from LIDAR segmentation............................... 138
Figure 5.3 Detected non-ground objects and buildings.................................................. 139
Figure 5.4 Regularized building boundaries with DSM................................................. 140
Figure 5.5 An example of boundary regularized............................................................ 141
Figure 5.6 Normal data after filtering and extracted roofs............................................. 143
xii

Figure 5.7 An example of 3D building models from LIDAR data................................. 145
Figure 5.8 A subset of reconstructed building................................................................ 146
Figure 5.9 3D visualization of reconstructed building models....................................... 146
Figure 5.10 Discrepancy among duplicated corners....................................................... 147
Figure 5.11 A refined model with consistency............................................................... 148
Figure 5.12 Deviations of reconstructed models from actual objects............................. 150
xiii

xiv
LIST OF TABLES
Table 3.1 Adjacency matrix of roofs and vertical walls................................................. 101
Table 3.2 An example of point-surface matrix............................................................... 105
CHAPTER 1
INTRODUCTION AND PROBLEM STATEMENT
1.1. Motivation
In the past few years, virtual city models have been used more and more in research
activities due to a great demand from a variety of users. A virtual city model can be
utilized in urban planning, cartography, architecture, environmental planning,
telecommunication, and tourism. One of the most challenging parts in building a virtual
city model is building model reconstruction. According to the survey conducted by The
European Organization for Experimental Photogrammetric Research (OEEPE), the most
interesting part within a virtual city model is 3D building data, which is superior to traffic
network data; the survey also showed that photogrammetry is the only economical
approach to acquire 3D city data (Förstner, 1999). Building extraction, especially in
urban areas, is one of the major problems in image understanding and photogrammetry
(Elaksher, et al., 2002).
Photogrammetry is the primary approach for cartographic and GIS production at
present. Experts from both computer science and photogrammetry are working together
for new applications. At the same time, new sensors are being developed and bring new
1
technologies into photogrammetry community, such as SAR (Synthetic Aperture Radar)
and LIDAR (LIght Detection And Ranging).
Introduced in the 1980s, LIDAR technology has continued to draw great attention
from researchers; and many commercial systems were already available by the mid-
1990s. LIDAR is now a mature technology, and it is widely used in flood control
applications, forestry applications, cartography, and other disciplines. Unlike traditional
photogrammetric sensors, a LIDAR system measures 3D coordinates of ground points
and makes it easy to automatically derive a digital surface model (DSM).
Photogrammetrists and computer scientists are demonstrating more and more interest
in building extraction and reconstruction. Much research has already been conducted
using imagery data captured from aerial platforms or ground platforms. People interested
in building extraction have begun using LIDAR technology due to its great degree of
automation for deriving a DSM from 3D ground coordinates. In reality, many building
reconstruction research studies based on imagery data began with the process of a DSM,
which was generated from stereo images. The major contribution of DSM in these studies
is to provide building candidates. In other words, the building detection usually is
achieved from a DSM. Many research works have been reported regarding LIDAR data
processing, among which building detection and reconstruction are two major issues
addressed by many experts. Despite the accomplishments achieved by researchers, there
are still many problems unsolved in this discipline. The objective of this research is to
find an approach, or methodology, to perform building model reconstruction from both
2

LIDAR data and aerial imagery. In this chapter, relevant research activities will be
reviewed and unsolved problems will be highlighted.
1.2. Building model and model reconstruction
Buildings in the real world have a great variety of forms. In the building research
community, a commonly accepted definition of building models is not available. People
are using their own models for research. Among those studies on building reconstruction,
there are roughly two kinds of building models defined (Förstner, 1999; Maas and
Vosselman, 1999). The first one is the parametric model and the second one is the
generic model. Because the generic model is too abstract, some sub models are proposed
such as the prismatic model, the polyhedral model and the CSG (Constructive Solid
Geometry) model (Förstner, 1999; Haala and Hahn, 1995; Wang, 1999). In reality, the
classification of building models is closely tied with the methods for model
reconstruction. Methods for building model reconstruction are generally classified as
model-driven, data-driven, and CSG methods. Generally speaking, a model-driven
approach deals with parametric building models and a data-driven approach deals with
generic models. A CSG approach is a hybrid of the other two approaches. In this section,
building reconstruction research will be reviewed according to these three major
reconstruction methods, namely, the model-driven approach, the data-driven approach,
and the CSG approach.
Model-driven method has a finite set of fixed building models. A building
reconstruction system using this method has a building model database. Each model in
3

the model base performs as a hypothesis in building reconstruction. Such a hypothesis
should be tested and verified from data. Several algorithms and strategies have been
developed to verify a building model hypothesis based on several kinds of information
derived from data. This approach is called the model-driven approach because it starts
from a model as a hypothesis, and it uses data to verify the model. This reconstruction
schema is easy to understand and to implement, but it can only handle simple building
models such as flat-roof and gable buildings. As mentioned above, actual buildings in the
world appear in a variety of forms and a model-driven system cannot model all kinds of
buildings in its model database. Some experimental systems have demonstrated very
good results in reconstructing simple buildings using this method.
The second approach of reconstruction is the data-driven method. This method deals
with generic building models, which are comprised of a series of building surfaces. The
data-driven approach usually follows three steps: 1) extraction of building primitives (the
surfaces of a building); 2) reconstruction of surface topology; and 3) construction of a
building model. This method doesn’t assume fixed building structures, thus it can handle
all kinds of buildings theoretically because buildings in the real world can be represented
as a set of primitives, regardless of whether they are planar facets or curved facets.
Compared with systems using parametric models, a system using generic models is more
difficult to implement.
Since the generic model is very complex and abstract, some sub models are proposed
based on specific distinctions (Förstner, 1999). They are prismatic models, polyhedral
models, and CSG models. Among these, the polyhedral model is the most important one.
4

It assumes a building is bounded by planar surfaces. This assumption is true for the
majority of actual buildings. In this research, a CSG model will be treated as a hybrid of a
parametric model and a generic model instead of being a sub model of the generic model.
A CSG model divides a complex building model into several simple primitives. Each
primitive is stored in a model base. The primitives play the same roles as the models in
the model-driven method. The critical procedure for a CSG reconstruction method is the
division of a complex building model into primitives. Sometimes it may generate
primitives not existing in the model base.
Building reconstruction systems can be distinguished as semi-automatic and
automatic systems depending on the degree to which a system user need to interact with
the system to guide it in finishing a project (Weidner and Főrstner, 1995; Forstner, 1999).
Automatic systems are still in the stage of proposal because there are many problems
unsolved yet. Semi-automatic systems have obtained great progress and generated
promising results because users can guide the systems to a reasonable direction and
discover results. User interaction can solve or avoid problems that cannot be solved by
computer itself.
The LIDAR research community is becoming very active in building reconstruction
(Maas and Vosselman, 1999; Maas, 1999a, 1999b, 1999c; Stamos and Allen, 2000;
Alharthy and Bethel, 2002; Haala and Hahn, 1995). One important reason is that
producing a DSM from LIDAR data is more easily automated than producing a DSM by
traditional photogrammetric techniques. Many research works on building reconstruction
begin with the process of a DSM, which is either obtained from LIDAR points or
5

imagery data. LIDAR data has the advantage in deriving a DSM over imagery data,
especially in a poor context situation. Generally, LIDAR data has a vertical accuracy of
25-30 centimeters and even as close as 15 centimeters; its horizontal accuracy varies
according to horizontal resolutions.
1.3. Peer Research
Building reconstruction involves two procedures. One is building detection, and the
other is 3D model reconstruction. Many studies have been carried out using different
types of data. The majority of this kind of research was conducted on aerial photographs.
In this section, the related research will be reviewed and analyzed.
1.3.1 Reconstruction from LIDAR data
Many researchers have reported their works on LIDAR data processing recently.
These works mainly include bald DTM generation, DSM generation, and building
reconstruction. Building reconstruction can be started from original LIDAR point data
(Maas and Vosselman, 1999) or from a grid DSM interpolated from LIDAR point data.
Generally, there are four steps involved to reconstruct building models from LIDAR data
(Alharthy, and Bethel, 2002; Axelsson, 1999; Elberink et al., 2000; Maas, 1999a, 1999b,
1999c):
• Data segmentation to distinguish LIDAR points falling onto a different object,
particularly points falling onto the ground, and points falling onto non-ground
6
objects such as buildings and trees. This work can be accomplished using
image filtering algorithms such as morphological filters;
• Building detection to differentiate building points from non-building points
(mainly points on trees) from the extracted non-ground points in LIDAR
segmentation. This task can be accomplished by computing and comparing
the region size, shape and elevation variance. Some LIDAR systems can
record the reflectance from objects together with the range recording. Thus,
reflectance data can also be used in this classification. Other auxiliary data
such as hyper-spectral data can also be used to help building detection
(Elberink and Maas, 2000; Alharthy and Bethel 2002; Mass, 1999a; Haala and
Brenner, 1999);
• Building reconstruction to generate 3D building models. In this procedure,
either a parametric model or a generic model can be used based on prior
knowledge of buildings. Some primitives are extracted here such as lines and
planes depending on how a building model is represented;
• Model refinement to improve model accuracy. For generic models, this task
involves plane combination, topology and geometry analysis. Due to poor
morphologic quality of LIDAR data, some algorithms or strategies are
employed to refine a building model. An important objective is to get sharp
and regular boundaries, typically rectangular boundaries for a building model.
Those algorithms usually use internal building characteristics like parallelism,
othogonality, symmetry and so on.
7

LIDAR segmentation is a major issue in LIDAR data processing. Several algorithms
have been developed to perform the classification of LIDAR points. To distinguish
ground points from LIDAR point data, morphology filters can be applied based on the
assumption that the ground point height is lower than its neighboring object points.
Another assumption is that the ground is smooth. In other words, there is no abrupt
elevation change on the ground. Some studies on this separation have been carried out
and promising results were produced (Weidner and Förstner, 1995; Morgan and Habib,
2002). However, morphology filters are sensitive to noise. Although a median filter can
be used to decrease the effects from a single error point, the effects from errors in a form
of a point patch cannot be eliminated or decreased. Kilian et al. (1996) used a “multi-
level opening” morphology operator in order to keep small ground features while
removing large non-ground objects. Because small windows have small weights in his
method, small features can still be removed.
“Linear prediction” is a statistical interpolation method. It is employed in LIDAR
data segmentation by researchers to generate digital surfaces (Lohmann and Koch, 1999;
Lohmann, et al., 2000; Kraus and Pfeifer, 1998; Lee and Younan, 2003). Vosselman
(2000) proposed a slope-based method to filter out non-ground points. It is a modification
of morphology erosion operator. Sithole (2001) modified this method to use different
maximal slope thresholds according to local terrain characteristics. Several other studies
have also been conducted to perform LIDAR segmentation (Matikainen, et al., 2003;
Rottensteiner and Briese, 2002; Lohmann, 2001; Brunn and Weidner, 1997; Axelsson,
1999; Haala and Brenner, 1999; Schiewe 2003).
8
After building regions are detected, a 3D building model can be reconstructed from
the LIDAR points falling within the detected building regions. Mass et al. (1999)
reported their works using raw LIDAR data. In one method they used, invariant moments
were applied to reconstruct parametric building models. They concluded that high order
invariant moment can be used to derive complex building models but these moments are
sensitive to noise. In their experiment, the 1st and 2nd order moments were used to derive
gable building models including dorms on building roofs. They also employed the
generic model (polyhedral model) to reconstruct buildings. The building planar facets of
a building were detected first using a clustering algorithm. To detect roof facets, a 3D
Hough transformation was performed on a Delauney Triangulation mesh generated from
building roof LIDAR points. The LIDAR data they used has a density of 5 points/m2.
They assumed that the point distribution is homogeneous in order to use invariant
moments. Inhomogeneous point distribution will introduce biases into the derived
building models.
Some recent LIDAR systems are capable of capturing multi-pulse information,
especially the first and the last pulses. Alharthy and Bethel (2002) reported their works
conducted on the first and the last pulse laser scanner data. They obtained sound results in
separating vegetation/trees from buildings using these two pulse reflection data because a
building has no or very low reflection in the last pulse while a tree area has a high
reflection due to laser penetration. Other objects like cars were eliminated based on
height and size thresholds. For computation convenience, they calculated the major-
minor directions for a building region using the cross-correlation between a building
9
region and a template; then the building region was rotated to have a horizontal/vertical
pose.
LIDAR data has special characteristics and it needs some particular methodologies to
process. For general LIDAR post-processing, Tao and Hu (2001) gave an overview of
commonly used algorithms. Point densities of LIDAR data used by researchers in the
building reconstruction community are very high; usually the studies were carried out
using LIDAR data of a density of approximate 4 points/m2 in order to get fine building
models. Thus, the cost of LIDAR data acquisition and data processing will be high.
Another disadvantage of LIDAR data is its poor morphological quality; it cannot capture
sharp linear features such as building boundaries. The consequence is that it is difficult to
get high accuracy building models only from LIDAR data if its point density is not high.
1.3.2 Reconstruction from imagery data
Plenty of studies on building reconstruction using imagery data have been reported.
Researchers have explored methods to reconstruct building models using different image
data sources. Basically, research methods using imagery data to reconstruct building
models can be differentiated as methods using monocular images, methods using stereo
images, and methods using multi-images.
Monocular imagery
Monocular imagery is usually used for building detection rather than building
reconstruction. Although some studies have been conducted to reconstruct 3D building
models from monocular imagery, the reconstructed building models are quite simple.
Generally, there are two commonly used clues in monocular imagery related research:
10
building shadows and vertical walls. These two clues are very useful in detecting
buildings and in verifying building hypotheses. In order to reconstruct 3D building
models, some auxiliary information is necessary such as the sun angle and the flight
height. Lin et al. (1995) used a perceptual grouping approach to generate, select, and
verify a building hypothesis. They processed oblique view images in order to use vertical
walls as detection clues and verification criteria in their experiments. They extracted
edges and grouped them to form parallel pairs as primitives for building detection. Their
further studies were focused on model verification and error correction (Nevatia et al.,
1997). They built a system through which system users can interact with it so that users
can guide the system to produce results qualitatively and quantitatively. A qualitative
interaction indicates a problem, whether it is a missing building or a falsely detected
building. A quantitative interaction performs spatial or geometric corrections. They
concluded that user interaction could dramatically improve the accuracy of system
outputs. Xu et al. (2002) reported their works using a Hopfield Neural Network reasoning
in building reconstruction. A Gabor filter was employed to eliminate noisy edges; and
then a Normalized Central Contour Sequence Moment (NCCSM) was used to pick up
regular contours, which are building boundary candidates. After the regular contours
were generalized using Hough Transformation, a Hopfield Neural Network was applied
to reconstruct building models. The algorithm was tested on flat-roof and gable buildings.
The sun angle and the approximate flight height related to the image under study are
needed in their experiments.
11

McGlone and Shufelt (1994) used a projective imaging geometry to extract
buildings and to estimate building parameters from monocular aerial images. They
calculated vanishing points using the Gaussian Sphere technique to detect horizontal
and vertical lines that are candidates for building edges. They detected corners from
perpendicular lines; then they used perpendicular line pairs to form boxes, which are
building hypothesizes to be confirmed using clues. By geometric consistency
checking, they eliminated some false hypotheses. For surviving hypotheses, they
estimated shadow intensity to verify building models. The height of a building model
was estimated from its roof points in object space.
These methods using monocular imagery usually assume that the surrounding
ground of a building is flat and level. This assumption is very strict. It cannot deal
with the occlusion problem either. In addition, it can only reconstruct simple building
models such as flat-roof and symmetric gable buildings.
Stereo and multiple images
For methods using stereo images, researchers usually follow a procedure of
building detection, and then model reconstruction. Weidner and Főrstner (1995) used
stereo images to construct high resolution DSMs. From this DSM, they performed
image segmentation using gray-scale morphology operators to detect building
boundaries. The geometric constraints in the form of a parametric building model
were applied in their experiments. They also developed a new MDL-based (Minimum
Description Length) approach to regularize the polygonal ground building footprint.
12
They used the parallelism and perpendicularity characteristics of a building boundary
to eliminate noises introduced by the conversion from raster to vector.
Haala and Hahn (1995) reported their studies using stereo images. A DHM
(Digital Height Model) was generated from stereo images; then buildings were
initialized from the DHM as the regions with a local height maximum. 3D line
segments were generated from matched 2D stereo image edges. They used parametric
building models in their research. Building models were compared with extracted 3D
line segments. They can estimate the parameters of a building model by minimizing
the distances between model lines and the calculated 3D lines from stereo images.
The problem of this method is the poor morphology quality of the stereo-image
derived DHM. It will introduce errors into building models.
Elaksher and Bethel (2002) used multiple images to extract 3D building wire-
frames with a robust multiple image line-matching algorithm. They intended to
overcome the occlusion problem existing in stereo image processing. The image
regions from segmentation were classified into regions based on region shape, size
and spectral information. Roof regions are then matched among multi images pair-
wise using the Scott and Longuet-Higgins algorithm (Scott and Longuet-Higgins,
1991; Pilu and Lorusso, 1997).
Elaksher (2002) elaborated his research on building reconstruction in his Ph.D.
dissertation. He used multiple images in reconstructing building models. The
primitives he used for building reconstruction are homogeneous regions because
region matching is more robust than point and line matching. He extracted
13
homogeneous regions using the split-and-merge methodology from each image; and
then he matched these homogeneous regions pair-wise among multiple images. One
major objective of his research is to solve the occlusion problem in object
reconstruction using the photogrammetry technology. A neural network algorithm
was employed to distinguish roof regions from these extracted image regions using
the indices he derived, which are height and linearity. The height information came
from a high accuracy DSM. He projected the DSM into the image space; then he used
the height information in roof region classification. Another criterion for roof region
classification is the linearity of region borders. The linearity indicates a percentage of
the points that can be represented by a linear segment. Finally, he used geometric
constraints to merge adjacent corners or points on roofs in order to obtain a correct
building model topology.
Nevatia et al. (1997) also used multiple images in their research. But they
reconstructed building models from a single aerial photograph. Reconstructed
building models were then projected to other aerial photographs so that they could
verify and refine these building models. They reconstructed building models from
each of the multiple images, and then verified and integrated the models using
information from other photographs.
There are several other research works using stereo or multiple images for
building reconstruction. Zimmermann (2001) used multiple clues to isolate, locate
and identify buildings. The clues include color, edge, textures and a DSM. Brunn
(2001) extracted buildings using statistical methods. He detected and reconstructed
14

building models using a Bayesian Network, then he refined the models using the
Markov-Random-Fields. Scholze et al. (2001) used high-resolution color stereo
images to reconstruct building models based on a polyhedral model. 3D lines were
grouped into plane patches and the Bayesian technique was used to generate and
verify building hypothesizes. They employed a bootstrap strategy to iteratively
generate, verify and improve hypothesis from those plane patches that passed the
Bayesian test, until a complete building model was found the hypothesis. Fuchs
(2001) proposed a structural approach for building reconstruction aiming at dealing
with mid-level 3D features in a unified framework. The roof shapes were represented
using an attributed relational graph. Frère et al. (1997) reconstructed polyhedral
building models from multiple images. The primitives they used for reconstruction
were homogeneous regions. Spreeuwers et al. (1997) used a model driven approach
for building reconstruction. Building models were compared and verified based on
the clues extracted from multiple images.
Basically, the methodology of building reconstruction based solely on imagery
data has a low degree of automation. Systems based on this methodology still need
many guides or interactions from users in order to get accurate and robust results. The
model-driven approach is better than the data-driven approach because the former has
more prior knowledge of a building model.
The research studies mentioned above usually assume some conditions such as
homogeneous point distribution, level and flat surrounding ground, and no abrupt
height changes on roofs. In addition, the reconstructed building models usually are
15

simple building types. In order to make a system handle more complex building
models, some auxiliary data should be used.
1.3.3 Reconstruction from LIDAR, imagery and other auxiliary data
It is believed that the synergy of data from different sources will give more
effective information than the sum of data (Csathó et al., 1999; Schenk, 2002). The
two technologies, LIDAR and photogrammetry, are treated by researchers as
complementary to each other (Baltsavias, 1999). The integration of both technologies
is believed to lead to more accurate and complete products (Baltsavias, 1999). But
currently, there is no hardware integration to simultaneously capture LIDAR data and
imagery data that have the same accuracy level as traditional aerial photographs.
Some research works tried to integrate LIDAR data, imagery data and GIS data from
different sources for building reconstruction. How to fuse or integrate the data is an
important and active research topic.
Haala and Brenner (1999) reported their works on building and tree extraction in
urban areas using both LIDAR data and imagery data. They used multi-spectral
imagery data and LIDAR data to classify buildings, trees and grass-covered areas;
then they used the LIDAR data and building ground plan data to reconstruct building
models. The ground plan data has the basic information of a building, especially the
boundary information. They assumed that the ground plans are correct and exactly
defines the boundary of building roofs. This assumption would not work in cases
where the ground plan data does not match the LIDAR data.
16
Stamos and Allen (2000) reconstructed building models using LIDAR data and
images. Both data sets were obtained from ground platforms. LIDAR data was
segmented to identify planar facets. Linear features were extracted from both range
data and images. These linear features were used to co-register images with LIDAR
data. Imagery data was projected to 3D building model. Using this approach, they
built a geometric and photogrammetric 3D scene. Because the LIDAR data they used
are very dense and highly accurate, fine linear features can be extracted directly from
it.
Mcintosh and Krupnik (2002) presented their research work on generating
accurate surface models. A laser-derived DSM has poor textural and structural
information. Thus, they tried to improve the DSM quality from image information.
They extracted 3D line segments from stereo image processing; and they registered
the 3D line segments with the DSM derived from laser data. Those 3D lines acted as
discontinuity lines and were used to improve the surface model. The DSM was
improved from a TIN model, which was generated from laser point data using the 3D
line segments as break lines. They provided a good example of data fusion for
LIDAR data and imagery data.
Vosselman and Suveg (2001) used ground plan data and LIDAR data to
reconstruct building models. They decomposed a building ground plan into polygon
segments. Each segment indicates a planar facet of a building roof. Different segment
composites were tested. Each segment was used to extract LIDAR points. The
parameters of a planar surface can be derived from the extracted points using the least
17
square method. The topology of these planes was analyzed and intersection lines were
derived, as were the corners. The planar surfaces from each segment were analyzed
and tied together using CSG operators such as the union operator and the intersection
operator. They also used ground plan data and aerial images to reconstruct building
models. The second approach is more model-driven oriented. For each segment, three
building hypothesizes were generated. 3D lines were extracted from stereo pairs with
the constraints from the ground plan data. The gradients of images were calculated.
The edges of building hypothesizes were projected onto images. Visible projected
edges on images were compared with the gradients to verify the hypothesis and to
compute building model parameters. They also pointed out that the fusion for LIDAR
data and image data will be very promising due to the fact that two data sets are very
complementary.
Csathó et al. (1999) proposed a theoretical framework of data fusion for aerial
images, LIDAR data, and other multi-sensor images in order to obtain more
information for object recognition, especially building reconstruction. The fusion can
be performed at different levels, namely the data level, the feature level and the object
level. Multi-spectral data can be classified and split into different class regions; and
region boundaries can be extracted. Surfaces will be constructed from LIDAR data
using a perceptual organization methodology. Edges extracted from stereo aerial
images can be used as discontinuity lines to match LIDAR surfaces. Thus, a LIDAR
surface can be improved. Objects will be extracted from the surfaces and multi-
spectral classes. They proposed that objects could also be analyzed and integrated,
18

which is a kind of fusion at the object level. Schenk and Csathó (2002) fused LIDAR,
aerial images, and hyper-spectral images for object recognition. Similar results were
also reported by Schenk (2002). The hyper-spectral data he used is AVIRIS (Airborne
Visible/Infrared Imaging Spectrometer). Seo (2002) used LIDAR data to extract
contours; and he classified these contours to distinguish building regions. He used
point, line and region as feature primitives and compared the features from different
data sets.
Data fusion for LIDAR data and aerial images is usually performed to take
advantages of both height information and context information. Actually, a great
percentage of stereo-image based studies in building reconstruction used a DSM,
which was generated from stereo images. LIDAR can provide much better quality
height information and it is easier to be processed automatically compared with the
photogrammetric approach. Comparably, photogrammetry can provide much better
surface discontinuities (or break lines). A fusion involving other GIS data like
building ground plans is also very helpful as demonstrated from reported
experiments. Generally, integration of data from different sources can provide an
effective or even more efficient approach for building reconstruction.
1.4. Problem statement
The ultimate objective of building reconstruction is to automatically reconstruct
building models. The data used can be LIDAR data, imagery data, and other auxiliary
data. Despite the achievement from the active research in the last two decades, there are
19
still many problems that should be solved before an automatic system can be
accomplished. The major problems can be summarized as followings:
1. Monocular image based approaches usually cannot deal with complex building
models. They cannot deal with a scene with high relief because shadow clues will
introduce great errors in building hypothesis verification. In addition, vertical
walls are not always available to be used as clues. Urban areas are not suitable for
applying the monocular approach. The accuracy of reconstructed building models
is very low because of little information is available in one single image than
stereo and multiple images.
2. In urban areas, the occlusion problem is not fully solved by researchers regardless
of whether a monocular image based or a stereo image based approach is used.
Multi-image based approaches could be an alternative to overcome the occlusion
problem as demonstrated in some experiments, but it will increase the expense of
data acquisition and processing. Still, complex building models are difficult to
reconstruct.
3. LIDAR data has high vertical accuracy at the level of 15-30cm or even better, but
its horizontal accuracy is at meter level depending on specific applications. The
majority of the works on building reconstruction addressed by researchers used
high-density LIDAR data, usually around 4 points per square meter. This
increases the expense for data acquisition. LIDAR data has poor structure or
texture information, thus it is difficult to extract accurate sharp boundaries of
objects solely from LIDAR data.
20

4. Aerial photographs generally provide higher horizontal accuracy than LIDAR
data (Ackermann, 1999). It can provide plenty of texture and structure
information about buildings and accurate edges can be extracted from imagery
data. But building boundaries are usually not complete due to poor contrast of
optical reflectance from adjacent but different objects. Furthermore, processing of
image data is difficult to be achieved automatically. A problem with imagery data
based approaches is that building detection is an expensive and low-accuracy task.
5. Complex building models are not fully investigated yet. Polyhedral or CSG
models have potentials in complex building reconstruction. A particular problem
is the vertical facets or height-jump line detection within a building complex. In
reality, this also applied to imagery based approaches.
6. Data fusion has been applied to some extent, but it is still not well explored yet.
Further research should be performed to investigate how to integrate data, features
and objects at different levels.
In general, there are three steps for building reconstruction, namely building
detection, building model reconstruction, and model refinement. Because a surface is
easy to generate and human made objects can be recognized on a surface, usually a
building reconstruction starts from the process of DSM when a DSM is available. LIDAR
technology has the advantage in providing a high vertical accuracy DSM and a great
degree of automation in data processing. Meanwhile, photogrammetry data can provide
plentiful structure and texture information. Both technologies also have their own
disadvantages. LIDAR data has poor structure information; it cannot capture sharp
21

features such as break lines (Ackerman, 1999); while photogrammetry has difficulties
with object recognition due to image interpretation complexity and data processing cost.
As addressed by several researchers, it is a trend in the photogrammetry community
that imagery data and LIDAR data be combined together for industrial application. As
Ackerman stated in 1999, it would be a revolution in photogrammetry if imagery data
could be directly combined with spatial position data, specifically LIDAR derived digital
surface model.
The research presented here will describe and analyze a new method to integrate
LIDAR data and aerial imagery data to take advantages of both kinds of data. The DSM
used in this study is derived from LIDAR data. The LIDAR data and the aerial
photographs were acquired separately.
1.5. Research Focus and Methodology
The objective of this research is to reconstruct 3D building models from imagery and
LIDAR data. The images to be used are stereo aerial photographs with known imaging
orientation parameters so that 3D ground coordinates can be calculated from conjugate
points and 3D ground objects can be projected to image spaces. To achieve this objective,
a method of synthesizing both imagery data and LIDAR data will be explored; thus, the
advantages of both data sets can be utilized to derive 3D building models with a high
accuracy. In order to reconstruct complex building models, the polyhedral building model
will be employed in this research. Correspondingly, the reconstruction method is data-
driven.
22
The general research procedure can be summarized as: a) building detection from
LIDAR data; b) 3D building model reconstruction; c) LIDAR data and imagery data co-
registration; and d) building model refinement. The main role of aerial image data in this
research will be to improve the geometric accuracy of a building model. With a point
density of approximate 1 point/m2, the building can be detected with LIDAR
segmentation. In this research, new algorithms will be developed to perform LIDAR
segmentation and to differentiate buildings from other non-ground objects such as trees.
The features of a reconstructed building model from LIDAR data have different
geometric accuracy. The edges generated from roof intersection will have a high
accuracy, for example, the ridge of a gable roof building. However, vertical walls will
have a low accuracy, and they need to be refined with the help from aerial image data.
One important challenge of this research is to derive a consistent and topology-correct
building model with sufficient details, though its geometry accuracy may not be very
high. The expected contributions of this research lie in three aspects: 1) an effective and
efficient approach to detecting building regions from LIDAR data; 2) a well-organized
methodology used to reconstruct 3D building models from LIDAR data; and 3) a well-
developed methodology for integrating LIDAR data with imagery data to improve the
accuracy of reconstructed building models from LIDAR data.
1.6. Fundamental Concepts
This section provides the basic terms, concepts, and technologies that will be used in
this research.
23
1.6.1. LIDAR vs. Photogrammetry
Photogrammetry is defined by ASPRS (American Society for Photogrammetry and
Remote Sensing) as “the art, science, and technology of obtaining reliable information
about physical objects and the environment through processing of recording, measuring,
and interpreting photographic images and patterns of recorded radiant electromagnetic
energy and other phenomena” (Wolf and Dewitt, 2000). The information can be collected
from terrestrial, aerial and space based platforms. The media for recording and storing
information can be films or electronic chips. The most commonly used photographs are
aerial photographs. According to the geometry of imaging, aerial photographs can be
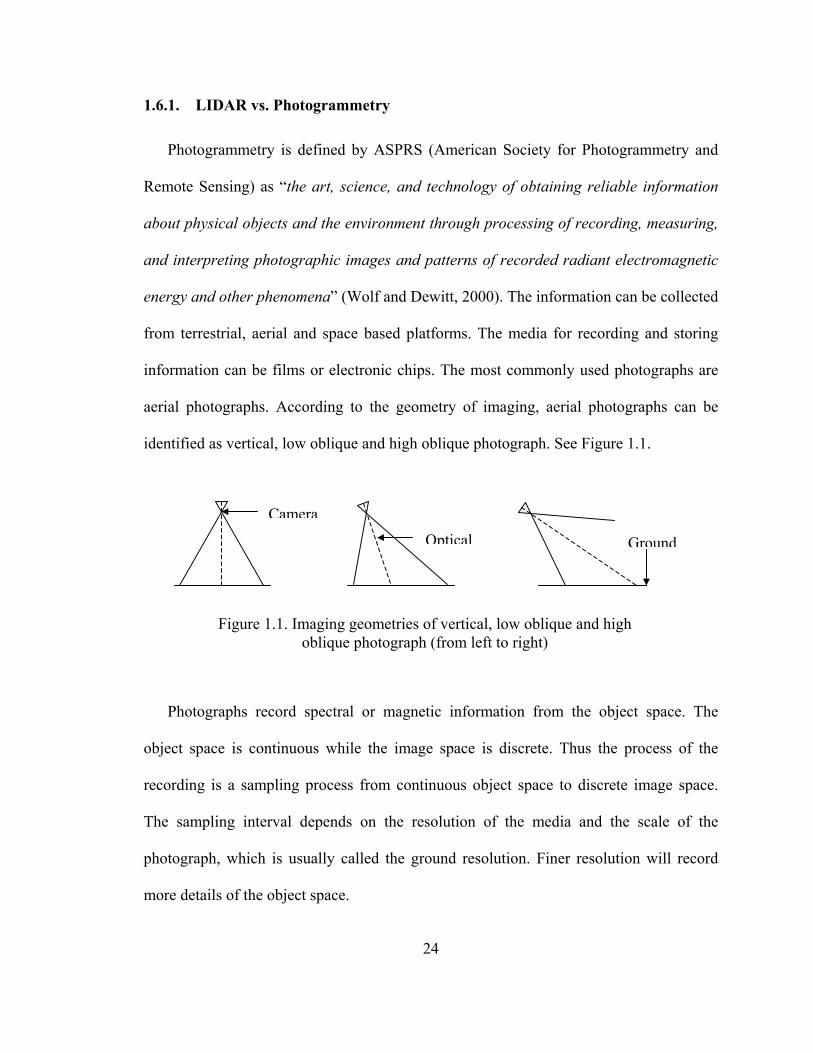
identified as vertical, low oblique and high oblique photograph. See Figure 1.1.
GroundOpticalCamera
Figure 1.1. Imaging geometries of vertical, low oblique and high oblique photograph (from left to right)
Photographs record spectral or magnetic information from the object space. The
object space is continuous while the image space is discrete. Thus the process of the
recording is a sampling process from continuous object space to discrete image space.
The sampling interval depends on the resolution of the media and the scale of the
photograph, which is usually called the ground resolution. Finer resolution will record
more details of the object space.
24

The objective of photogrammetry is to reconstruct object information in the object
space from image information. From the geometry of imaging, it is easy to understand
that the imaging is a process of information transformation from 3D space to 2D space.
The relationship from 3D space to 2D space is one-to-one; each object in 3D space
corresponds to one unique object in 2D space. However, the inverse transformation from
2D space to 3D space is one-to-many; each object in 2D space can find many
corresponding objects in 3D space. Thus, the reconstruction of 3D space cannot be
achieved from a single 2D image. In order to reconstruct the object space, stereo images
are utilized. See Figure 1.2. The fundamental principle used in photogrammetry is the
collinearity of the three points, i.e., the perspective center, image object (point) and the
object (point) in object space.
P2 P1
P
O1
Image 1 Image 2
Ground
O1 O2 O2
Figure 1.2. Stereo images (left) and space intersection for 3D space object reconstruction from stereo images (right)
According to the definition of photogrammetry, LIDAR (Light Detection And
Ranging) belongs to the scope of photogrammetry. However, due to its special
characteristics, LIDAR is usually treated as a separate technique different from
photogrammetry. The light used in a LIDAR system is laser. There are two kinds of laser
25
systems: the pulse laser system and the continuous-wave laser system. The commonly
used one is the pulse laser system.
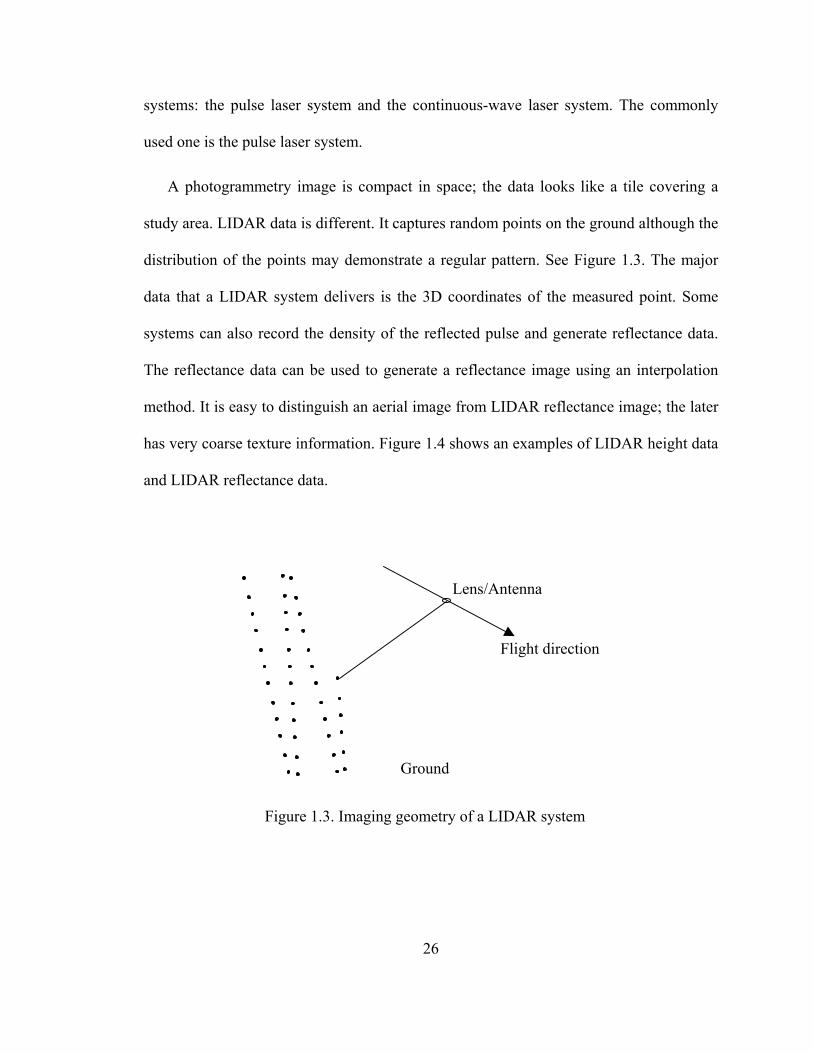
A photogrammetry image is compact in space; the data looks like a tile covering a
study area. LIDAR data is different. It captures random points on the ground although the
distribution of the points may demonstrate a regular pattern. See Figure 1.3. The major
data that a LIDAR system delivers is the 3D coordinates of the measured point. Some
systems can also record the density of the reflected pulse and generate reflectance data.
The reflectance data can be used to generate a reflectance image using an interpolation
method. It is easy to distinguish an aerial image from LIDAR reflectance image; the later
has very coarse texture information. Figure 1.4 shows an examples of LIDAR height data
and LIDAR reflectance data.
Flight direction
Ground
Lens/Antenna
Figure 1.3. Imaging geometry of a LIDAR system
26
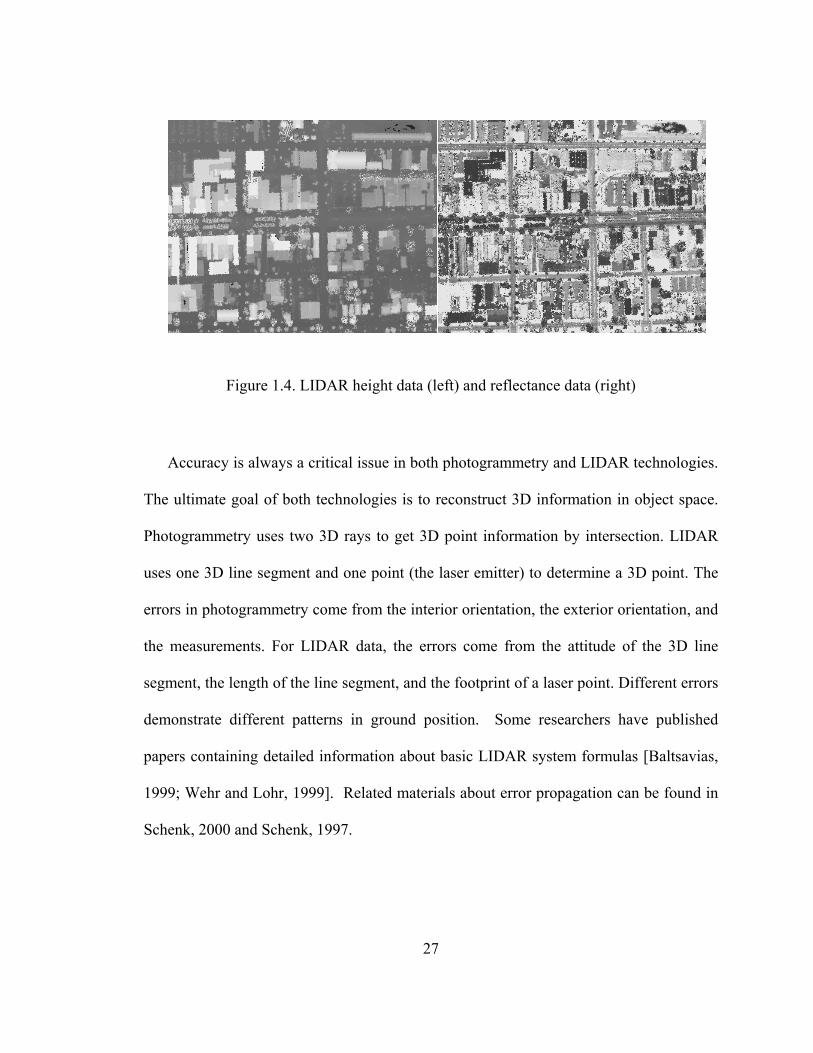
Figure 1.4. LIDAR height data (left) and reflectance data (right)
Accuracy is always a critical issue in both photogrammetry and LIDAR technologies.
The ultimate goal of both technologies is to reconstruct 3D information in object space.
Photogrammetry uses two 3D rays to get 3D point information by intersection. LIDAR
uses one 3D line segment and one point (the laser emitter) to determine a 3D point. The
errors in photogrammetry come from the interior orientation, the exterior orientation, and
the measurements. For LIDAR data, the errors come from the attitude of the 3D line
segment, the length of the line segment, and the footprint of a laser point. Different errors
demonstrate different patterns in ground position. Some researchers have published
papers containing detailed information about basic LIDAR system formulas [Baltsavias,
1999; Wehr and Lohr, 1999]. Related materials about error propagation can be found in
Schenk, 2000 and Schenk, 1997.
27

1.6.2. DTM vs. DSM
DTM refers to digital terrain model while DSM refers to digital surface model. DTM
depicts the topography of the bald earth. For DSM, both nature and man-made objects are
captured in the topography. See Figure 1.5.
Earth Earth
DSMDTM TreesTrees
Building Building
Figure 1.5. DTM (left) and DSM (right)
Both photogrammetry and LIDAR data can be used to generate DTM and DSM.
However, the direct product from these two techniques is DSM. In order to generate a
DTM, some filtering algorithms are employed to filter out the nature and man-made
objects from a DSM. The morphology filtering is one commonly used algorithm in
filtering out non-ground objects to generate a DTM. A DTM can be used for ground
planning applications such as flood control; while DSM can be used to detect objects on
the earth. The difference between DSM and DTM is usually called normalized DSM. It
keeps information about non-terrain objects such as buildings, trees, cars and so on. But
regardless of whether a DTM or a normalized DSM, they both come from DSM. Thus the
first data set to be processed for object reconstruction, especially building reconstruction,
is a DSM.
28
1.6.3. Building Detection and Building Reconstruction
Building detection refers to the process of differentiating buildings from other objects
measured within data. Taking an aerial image as an instance, which area or region on the
2D image is a building? This process is a qualitative process. An image can be segmented
into regions using algorithms; and each region can be analyzed and classified as an object
according to its spectral characteristics. Color image and multi-spectral images are used
in building detection because they capture more spectral information than Black/White
images. LIDAR can also be used for building detection. LIDAR data maps the
topography of the earth’s surface. Information about a building such as shape and
parallelism can be derived. These internal characteristics can also be calculated from
images.
Building reconstruction is the process of deriving building model parameters. The
commonly used building model is a CAD model, which has specific parameters such as
height, width, direction and other necessary information to reconstruct a building model.
These parameters cannot be captured by aerial images or LIDAR data directly. They need
complex spatial and topological analysis to be calculated. In this research, the building
detection and reconstruction are addressed in different parts.
1.7. Organization of this dissertation
This dissertation is organized into 6 chapters. Chapter 1 (the current chapter)
addresses the background related to the research.
29

30
Chapter 2 describes two new algorithms developed to perform LIDAR segmentation.
It illustrates how to extract building regions from LIDAR data. The so-called “height-
jump” and “planar-fitting” algorithms are developed and elaborated.
Chapter 3 presents a method for 3D building model reconstruction using a polyhedral
model. It describes a methodology for building model primitive construction, model
topology construction, and model reconstruction.
Chapter 4 elaborates an approach to building model refinement through the
integration of LIDAR data and imagery data. The focus of the refinement is the geometry
of a building model instead of its topology.
Chapter 5 demonstrates experimental results involved in this research to show how
the algorithms developed here work.
Chapter 6 concludes the dissertation research. It highlights the contributions and
analyzes the shortcomings of the research. It also projects further research in this topic.

CHAPTER 2
BUILDING DETECTION FROM LIDAR DATA
Building detection from LIDAR data is a part of LIDAR segmentation process. In
order to derive 3D building models, building regions will be detected and extracted from
LIDAR data first. In this study, two methods are developed to detect building regions in a
LIDAR segmentation process. These two methods are described in this chapter. The
comparison between these two methods and the morphology method is also presented.
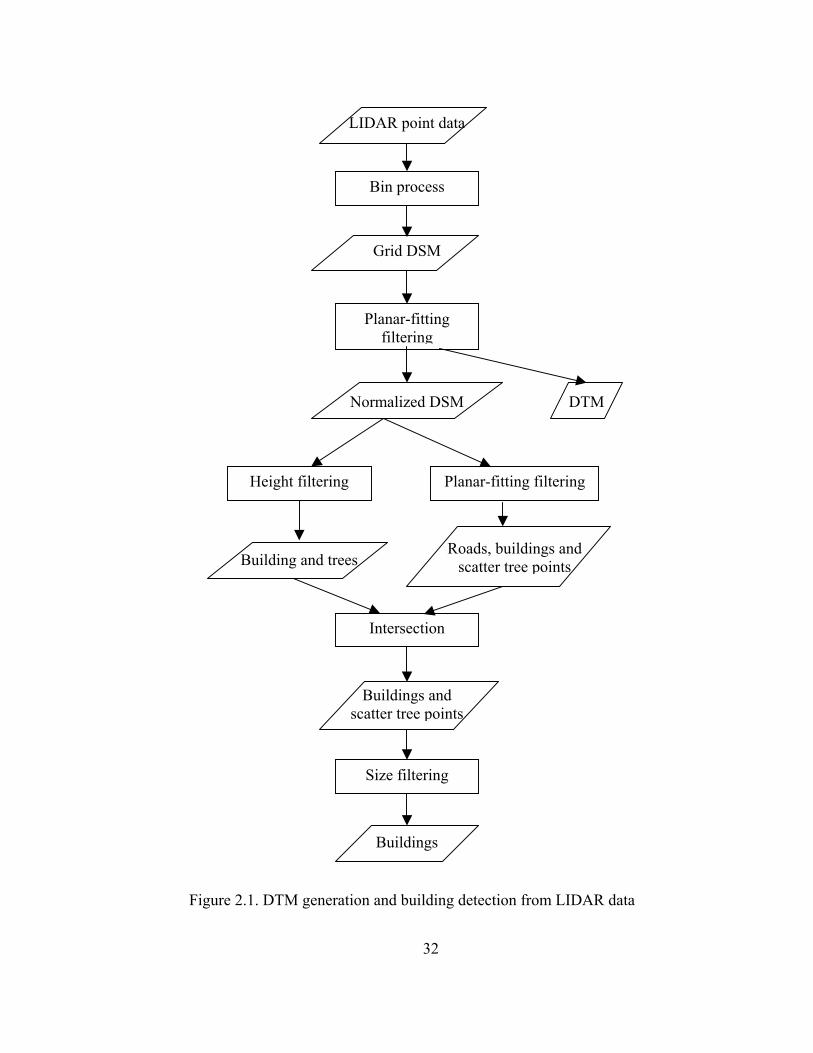
The whole process of DTM generation and building detection can be illustrated in a
flowchart shown in Figure 2.1.
31
LIDAR point data
Buildings
Size filtering
Buildings and scatter tree points
Intersection
Building and treesRoads, buildings and
scatter tree points
Planar-fitting filtering Height filtering
Normalized DSM DTM
Planar-fitting filtering
Grid DSM
Bin process
Figure 2.1. DTM generation and building detection from LIDAR data
32

2.1. Conventional Terms
Morphology operators: Morphology operators include a group of filters. The
commonly used ones are open, close, dilation, and erosion. A basic character of
these operators is to order the pixel values within a neighbor defined using
structure elements, and assign a specific value to the pixel under test. Morphology
operators are commonly used in binary image data. When these operators are
applied to gray scale images, they are also called gray morphology operators.
Structure elements: Structure elements of a morphology operator define the
neighbor of a pixel under analysis. For example, a 3 by 3 square window defines
the pixels directly adjacent to the central pixel as the neighbor of the central pixel.
The structure elements of a morphology operator can be of other shapes such as a
circle and a cross.
Neighbor: A neighbor of a point is defined as points within a distance threshold to
the point under study. In different processes, different distance thresholds can be
applied. Points falling in a point’s neighbor are used in analysis.
Ground region: A ground region includes roads and open ground. Bridges are also
included in a ground region. In an urban or a suburban area, it is usually the
largest area.
Building boundary: In this study, a building boundary is referred as a building’s 2D
footprint on the ground.
33
2.2. DSM and DTM Generation
The original LIDAR range data are random points and it is not convenient to perform
building detection and DTM generation directly from these points. Two intermediate
products are commonly used by researchers to perform further process. One is grid
format image; and the other is Delaunay Triangulation. The later is also referred as
Irregular Triangulated Network (TIN). These are two forms representing a 2.5D surface.
LIDAR range data measures the surface exposing to a LIDAR antenna. For airborne
LIDAR data, it captures surfaces of objects on the ground and part of the earth’s surface
exposing to a LIDAR antenna. In GIS and remote sensing community, this surface is
called Digital Surface Model (DSM). Instead of DSM, the useful products for a GIS
system are Digital Terrain Model (DTM) and information about objects sitting on the
ground. Currently, how to separate DTM and objects from a DSM has become a popular
research topic, especially in the LIDAR research community. It is usually referred to as
LIDAR data segmentation.
In order to detect buildings, the DTM will be generated first, and then, a normalized
DSM (NDSM) will be generated for building detection in this research. A NDSM is a
surface relative to the DTM. Objects within a NDSM can be viewed as sitting on a level
plane. Building detection is then conducted on such a NDSM. In this research, the data
format used is grid format. Two criteria in choosing the grid format over the TIN model
are: 1) simple to process; and 2) available algorithms for preliminary process. The grid
format is simple; the spatial and topological relationships among pixels are easy to
34

calculate. In addition, there are many mature image processing algorithms that can be
applied to grid format LIDAR data.
2.2.1. Transformation of Points to Grid
To generate a grid DSM from random points, a transformation between the ground
horizontal coordinate system (X, Y) and the image coordinate system(i, j) is applied. For
transformation convenience, the X and i axes of these two systems are of the same
direction while the Y and j axis are of opposite directions. See Figure 2.2. The
transformation between these two systems is expressed in equation 2.1.
−=
stepXXIntegeri min
(2.1)
−=
stepYYIntegerj max
Y
X(Xmax, Ymin)
(Xmin, Ymax)
Figure 2.2. Conversion from points to grid
35
The step, or the resolution, of a grid is calculated as the inverse of the average density
of LIDAR points (see next paragraph for details). For each pixel (i, j) of a grid, its value
is assigned as the value of the LIDAR point that falls into the pixel calculated through
equation 2.1. However, due to uneven distribution of LIDAR points, some pixels have no
corresponding LIDAR points, while some pixels have more than one corresponding
LIDAR point. If a pixel has no corresponding point, an interpolation method will be
applied to derive its pixel value. If more than one point falls within a pixel, only the
minimum value is assigned to the pixel. The basic steps can be described as followings:
a. Calculate the maximum and minimum X and Y coordinates. Determine the spatial
resolution of the grid according to the range point density. Usually the resolution
is calculated as n1 , where n is the average number of points within an area;
b. Using equation 2.1, for each LIDAR point, the corresponding grid pixel location
is calculated and the Z value of the point is assigned to the grid pixel. During this
process, a test is performed. If a pixel is already assigned a value from another
point, this LIDAR point value is compared with the existing pixel value, and the
smaller value will be assigned to the pixel;
c. After each LIDAR point is processed, the value of a single vacant or an empty
pixel will be derived from its neighboring pixels using an interpolation algorithm.
In this research, the nearest neighbor method is applied to avoid introducing new
height values into the generated DSM. For a large empty patch like a pond, it will
36
remain empty. By doing so, new elevation values will not be introduced so that
the grid data will not be smoothed out.
From the procedure listed above, it can be seen that new height values are avoided.
The reason for avoiding new height values is that the DSM will be used to detect and
reconstruct building models; thus, it is preferable to keep the original height values within
the DSM instead of smoothing out the height differences by introducing new values
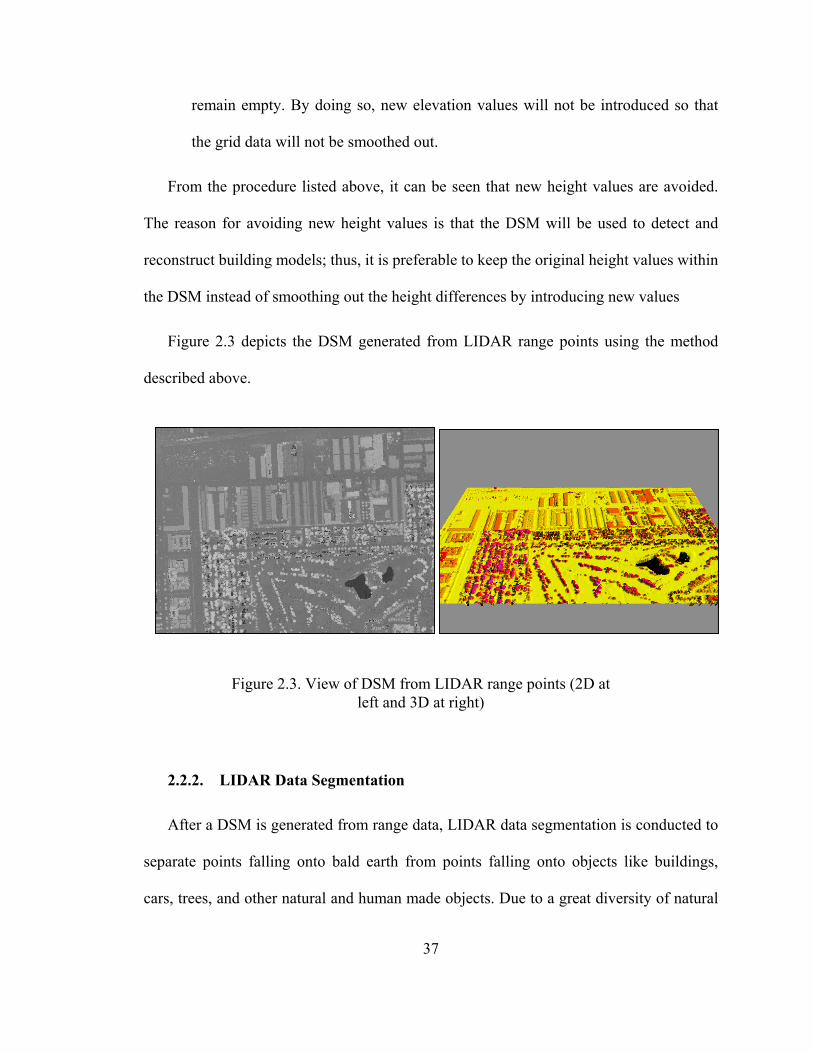
Figure 2.3 depicts the DSM generated from LIDAR range points using the method
described above.
Figure 2.3. View of DSM from LIDAR range points (2D at left and 3D at right)
2.2.2. LIDAR Data Segmentation
After a DSM is generated from range data, LIDAR data segmentation is conducted to
separate points falling onto bald earth from points falling onto objects like buildings,
cars, trees, and other natural and human made objects. Due to a great diversity of natural
37
phenomena, there is no such single algorithm that can work in all situations. Algorithms
are usually application dependent. In other words, they are developed to solve specific
problems using specific data. Thus, the data used should be analyzed and an appropriate
algorithm should be employed for best performance. Several algorithms have been
developed by researchers for LIDAR data segmentation.
Based on an assumption that a ground point’s height is lower than its neighboring
object points, morphology filters can be applied to distinguish ground points in a LIDAR
data set. Figure 2.4 shows a profile demonstrating the difference between ground and
non-ground objects. Another assumption is that the ground is smooth. In other words,
there is no abrupt change on the ground. Some studies on this separation have been
carried out and good results were produced (Weidner and Förstner, 1995; Morgan and
Habib, 2002). However, morphology filters are sensitive to errors. Although a median
filter can be used to decrease effects from single error points, effects from errors in form
of a point patch cannot be eliminated or decreased. Kilian et al. (1996) used a “multi-
level opening” morphology operator in order to keep small ground features while
removing large non-ground objects. Because small windows they used have small
weights, fine features can still be removed.
38

Figure 2.4. A profile depicting the difference between ground and non-ground objects like building and trees
Axelsson (1999) presented an idea to separate ground and non-ground points from
LIDAR data. The idea is to move a surface from below to LIDAR point cloud to touch
the ground surface. Controlled by a few parameters, the moving surface can adjust itself
to include points on the ground.
“Linear prediction” is a statistical interpolation method. It is employed in LIDAR
data segmentation by researchers to generate digital surfaces (Lohmann and Koch, 1999;
Lohmann, et al., 2000; Kraus and Pfeifer, 1998; Lee and Younan, 2003). The
interpolation is founded on spatial correlations of neighboring points, which are
expressed in the form of covariance. A covariance is calculated using a covariance
function based on the distance between two points. By comparing the original digital
surface with the predicted one that is generated using the “linear prediction” method,
points’ weights are calculated according to their residuals. The weights are also used in
calculating a covariance matrix. A DTM is generated from the terrain points with their
weights. Iterative execution is necessary to obtain a high accuracy DTM using the “linear
39

prediction” method. An initial DTM surface is required in order to use this method,
which can be calculated using a moving plane.
Vosselman (2000) proposed a slope-based method to filter out non-ground points.
The method is a modification of the morphology erosion operator. A point is classified as
a ground point if the maximal slope of the vectors connecting this point under test to all
its defined neighbors does not exceed the maximal slope within the study area. Sithole
(2001) modified this method to use different maximal slope thresholds according to local
terrain characteristics. A rough slope map is required to calculate the local slope
threshold. Like morphology operators, the problem with these kinds of methods is how to
define the neighbor of a point.
Several studies have been conducted to investigate building detection from LIDAR
data. After performing a region growing segmentation, Matikainen, et al. (2003), used
height information to separate trees and buildings from the ground; then a fuzzy
classification method was applied to detect buildings based on three attributes: the Gray
Level Co-occurrence Matrix (GLCM) homogeneity of height; the GLCM homogeneity of
LIDAR intensity; and the average length of edges from a “shape polygon” derived from
the segment under test. Rottensteiner and Briese (2002) used the height difference
between a DSM and a DTM, a morphological opening operator, and a size measurement
to detect buildings and tree groups. A polymorphic feature extraction method was then
used to detect “point-like” pixels. Based on analysis of the number of “point-like” pixels
of each segment, tree groups were eliminated. This whole process was repeated before
final building regions were generated. Lohmann (2001) investigated the Gaussian
40
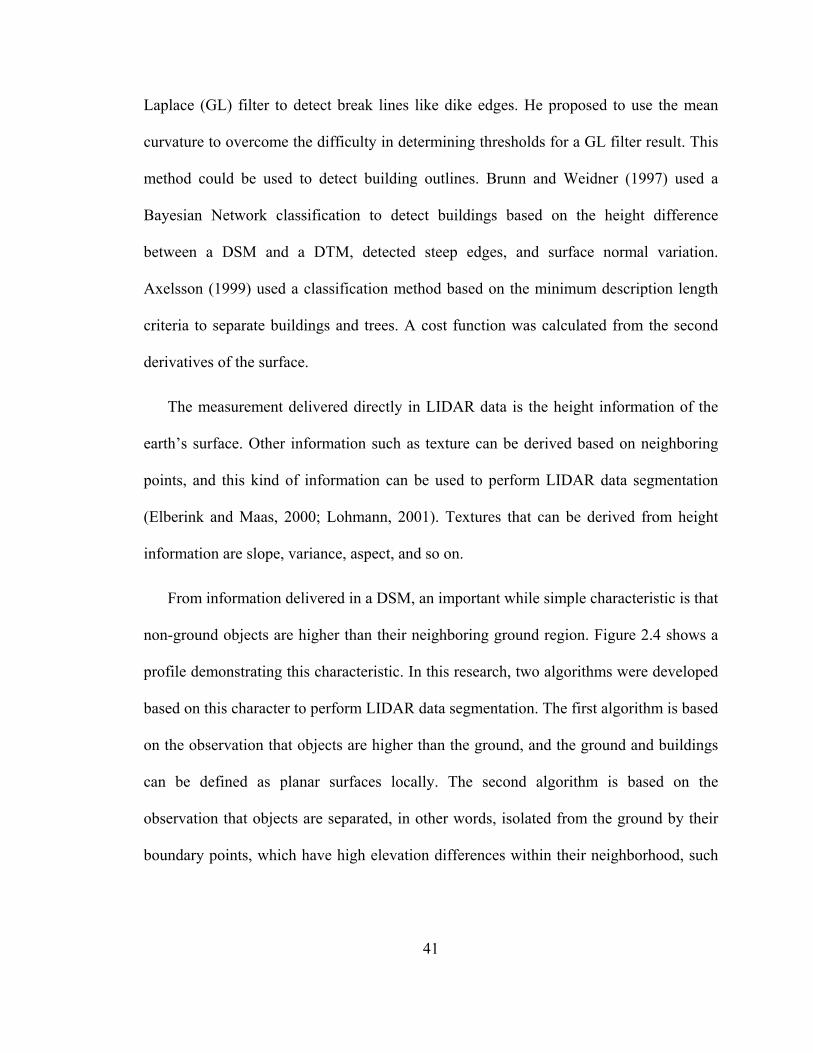
Laplace (GL) filter to detect break lines like dike edges. He proposed to use the mean
curvature to overcome the difficulty in determining thresholds for a GL filter result. This
method could be used to detect building outlines. Brunn and Weidner (1997) used a
Bayesian Network classification to detect buildings based on the height difference
between a DSM and a DTM, detected steep edges, and surface normal variation.
Axelsson (1999) used a classification method based on the minimum description length
criteria to separate buildings and trees. A cost function was calculated from the second
derivatives of the surface.
The measurement delivered directly in LIDAR data is the height information of the
earth’s surface. Other information such as texture can be derived based on neighboring
points, and this kind of information can be used to perform LIDAR data segmentation
(Elberink and Maas, 2000; Lohmann, 2001). Textures that can be derived from height
information are slope, variance, aspect, and so on.
From information delivered in a DSM, an important while simple characteristic is that
non-ground objects are higher than their neighboring ground region. Figure 2.4 shows a
profile demonstrating this characteristic. In this research, two algorithms were developed
based on this character to perform LIDAR data segmentation. The first algorithm is based
on the observation that objects are higher than the ground, and the ground and buildings
can be defined as planar surfaces locally. The second algorithm is based on the
observation that objects are separated, in other words, isolated from the ground by their
boundary points, which have high elevation differences within their neighborhood, such
41
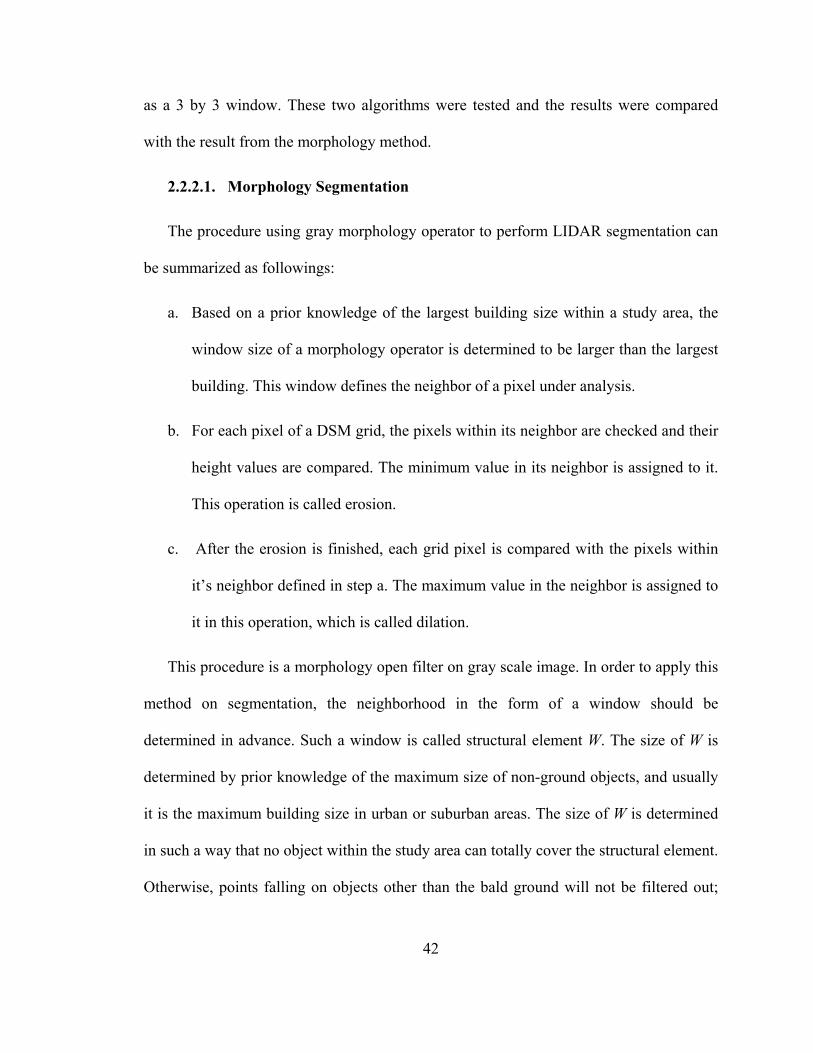
as a 3 by 3 window. These two algorithms were tested and the results were compared
with the result from the morphology method.
2.2.2.1. Morphology Segmentation
The procedure using gray morphology operator to perform LIDAR segmentation can
be summarized as followings:
a. Based on a prior knowledge of the largest building size within a study area, the
window size of a morphology operator is determined to be larger than the largest
building. This window defines the neighbor of a pixel under analysis.
b. For each pixel of a DSM grid, the pixels within its neighbor are checked and their
height values are compared. The minimum value in its neighbor is assigned to it.
This operation is called erosion.
c. After the erosion is finished, each grid pixel is compared with the pixels within
it’s neighbor defined in step a. The maximum value in the neighbor is assigned to
it in this operation, which is called dilation.
This procedure is a morphology open filter on gray scale image. In order to apply this
method on segmentation, the neighborhood in the form of a window should be
determined in advance. Such a window is called structural element W. The size of W is
determined by prior knowledge of the maximum size of non-ground objects, and usually
it is the maximum building size in urban or suburban areas. The size of W is determined
in such a way that no object within the study area can totally cover the structural element.
Otherwise, points falling on objects other than the bald ground will not be filtered out;
42

and consequently, the generated DTM will be biased. The biases will also propagate to
NDSM and final building models. On the other hand, a large size window will remove
fine features on the ground, such as a cliff. Obviously, the critical step in morphology
operation is to correctly determine an optimal size of the structural element.
A filtered DSM is a version of the DTM. Due to the internal characteristic of the
morphology operator, some or many small ground features were eliminated. The quality
of the DTM can be improved by tracking back the removed ground points. To achieve
this objective, LIDAR points were compared with the DTM. Those points with small
height differences are tracked back as ground points. Then, a new version of DTM can be
generated with a better quality. This comparison can be repeated until no more or a small
number of new points can be tracked back. The height difference threshold is calculated
based on the vertical accuracy of LIDAR points.
Figure 2.5 depicts a DTM generated from original DSM using gray-based
morphology open filter. The ground points were detected by comparing the DTM with
LIDAR points. Those points have a elevation difference smaller than the difference
threshold. The final DTM and the normalized DSM are displayed in Figure 2.6.
43
Figure 2.5. DTM from morphology filter (left) and ground points detected from normalized DSM (right)
Figure 2.6. 3D visualization of final DTM (left) and normalized DSM (right) from morphology opening
In Figure 2.5, the DTM has a pattern of tiles. This is caused by a large structural
element used in morphology open filtering. In a gray-based morphology open
filtering, the local smallest value will extend to a size of the structural element. Since
44
the structural element used in this experiment is a square window, the image obtained
a tile pattern. It should be noted that there are blank pixels in the original data. These
blank regions are areas that have low reflectance so that a LIDAR sensor cannot
detect them correctly. Examples of these areas are water regions. During the
morphology opening operation, these regions were not processed. They appear as
holes in Figure 2.6.
2.2.2.2. Planar-fitting Segmentation
In urban and suburban areas, the ground region is usually continuous without
abrupt changes in topography. Given LIDAR data with a certain resolution and
accuracy, such a smooth ground can be observed locally as a planar surface. That
means a group of neighboring ground LIDAR points, for example points within one 3
by 3 window, can form a local planar surface. Such a planar surface can be derived
using a regression method, such as the least square method, with a fitting accuracy no
worse than the accuracy of the original data points. Another observation is that the
ground is continuous. The planar-fitting segmentation in this research is developed
based on these observations to detect the ground as a large, continuous, and locally
planar surface. Figure 2.7 shows the flowchart of this method.
45
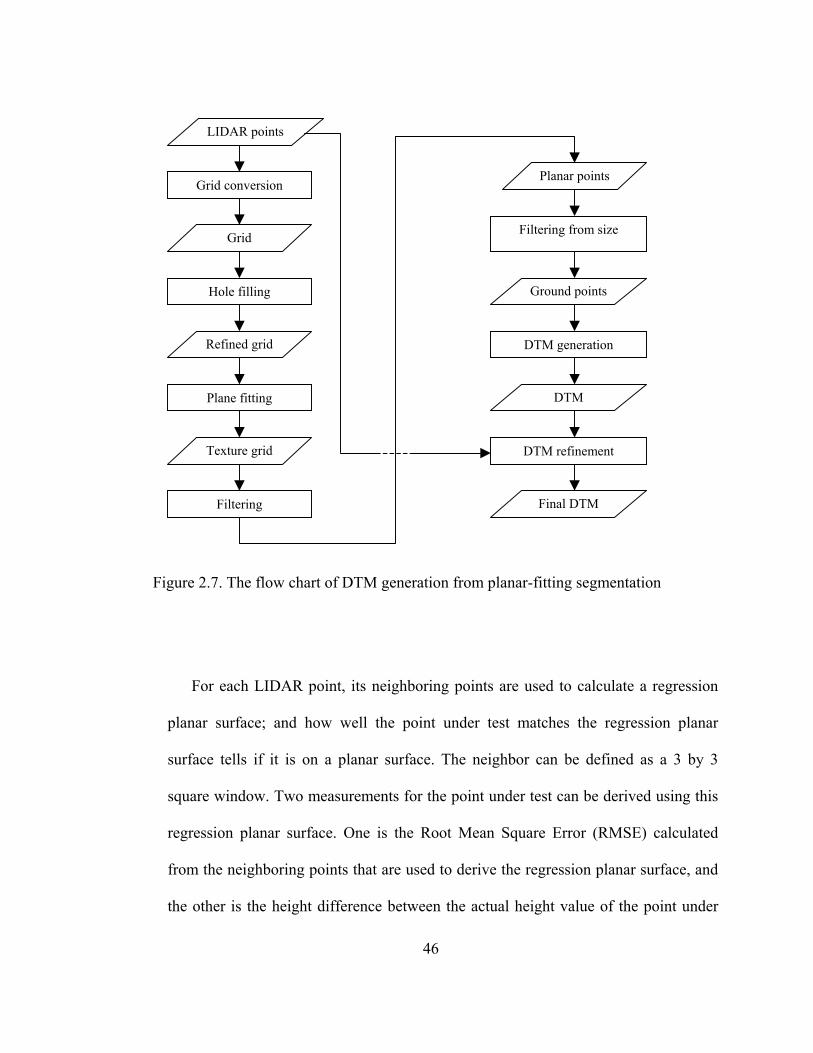
DTM generation
Ground points
Filtering from size
Planar points
Final DTM
DTM refinement
DTM
Filtering
Texture grid
Plane fitting
Refined grid
Hole filling
Grid
Grid conversion
LIDAR points
Figure 2.7. The flow chart of DTM generation from planar-fitting segmentation
For each LIDAR point, its neighboring points are used to calculate a regression
planar surface; and how well the point under test matches the regression planar
surface tells if it is on a planar surface. The neighbor can be defined as a 3 by 3
square window. Two measurements for the point under test can be derived using this
regression planar surface. One is the Root Mean Square Error (RMSE) calculated
from the neighboring points that are used to derive the regression planar surface, and
the other is the height difference between the actual height value of the point under
46

test and its height value calculated from the regression planar surface. Both
measurements indicate how well a point fits onto a planar surface formed by its
neighboring LIDAR points. These two measurements correlate with each other and
thus produce similar results. Points with a small RMSE or a small height difference
are classified as points on ground or building roofs, and points with a large RMSE or
height difference are classified as falling onto objects with non-planar surfaces like
trees and shrubs.
From its vertical accuracy of the original LIDAR data, a threshold of height
difference or RMS is determined to differentiate points falling onto planar planes
from points falling onto non-planar surfaces like trees. In this research, double stated
vertical accuracy of the original LIDAR data is used as the threshold. This threshold
can correctly classify most planar points, around 96 percent assuming a normal error
distribution. Further processing will be performed to test and classify more LIDAR
points as ground points. The classified planar points include points on the ground,
points on building roofs, and some scattered points on objects like trees and cars.
Another issue to deal with is what kind of ground surface this algorithm can
detect. The real terrain is not a perfect plane. The question is to what degree a rough
terrain can be classified as a local planar surface. This can be deduced from data
accuracy and data density, or the resolution of grid format data. Figure 2.8
demonstrates their relationship. The roughness of a terrain can be measured as
changes of terrain slopes.
47

2
α
β
)2
arctan(
2
Rh=
=
β
βα
βh
R
Figure 2.8. Conditions for a rough terrain to be classified as a planar surface using the planar-fitting algorithm
In Figure 2.8, α is the slope change caused by a terrain change. It is double β .
The symbol h is the fitting threshold used to test whether a point is falling onto a
planar surface or not. R is the resolution of the grid DSM. Since the window used for
plane fitting in this experiment is a 3 by 3 window, the maximal distance to the center
of the window is 2 R. As used in this experiment, R is 1 meter, and h is 0.3 meter.
Thus α is approximate 24 degrees. That means a ground surface with slope changes
smaller than 24 degrees can be classified as a planar surface. Thus, it can be correctly
extracted as a ground surface. In actual implementation, a rougher surface could be
classified as a planar surface because the central point is also used to define the
regression-fitting plane.
Points or pixels classified falling onto planar surfaces were extracted for further
process. First of all, connected regions were detected and labeled; and areas of these
connected regions were calculated by counting their pixel number. To differentiate
ground points from building roof points, it is assumed that the ground points form one
48

or more connected planar surfaces that have larger areas than the largest building
within a study area. In other words, the largest connected planar region is on the
ground. This assumption is true in urban and suburban areas where the ground region
is connected by a road system. Regions with areas larger than the largest building size
within a study area were extracted as ground regions. The ground region can also be
simply picked manually. LIDAR points falling within the ground regions were
extracted and used to generate an initial DTM. Figure 2.9 shows the calculated fitting
difference and an extracted ground region.
Figure 2.9. Calculated planar-fitting difference (left) and detected ground points (right) from planar-fitting segmentation method
After ground points were extracted, a DTM was generated using an interpolation
method. In this experiment, a TIN (Triangulated Irregular Network) model was
created first; then a DTM grid was generated from the TIN model. However, this
DTM is a rough one whose accuracy can be improved. A refinement was conducted
on the initial DTM to get a higher accuracy by tracking back more ground points
through a comparison of LIDAR point heights with the DTM elevation. In the planar-
49

surface fitting procedure, points falling on boundary regions of a planar surface also
had large fitting differences due to height jumps occurring in boundary regions. These
boundary points that are not initially classified as ground points should be included in
the final DTM. After the initial DTM was generated from initially classified ground
points, all LIDAR points classified as non-ground points were compared with the
DTM. Those points with differences smaller than the threshold were re-classified as
ground points, and these ground points were used to refine the DTM. Again, the
difference threshold in the comparison is twice the stated vertical accuracy of original
LIDAR point data.
Ground points were updated to include newly classified ground points from the
comparison of the previously generated DTM and actual point heights. The new
generated DTM had better accuracy since more ground points were included. This
procedure is repeated until no significant number of points are classified as on the
ground. This procedure can also be repeated for a fixed iteration number. For point
detection purpose during iteration, a simple interpolation method can be applied to
generate an intermediate DTM. The final DTM can be generated using a complicated
but accurate interpolation method, such as the Kriging method. A normalized DSM
can be obtained by subtracting the final DTM from the DSM. The final DTM and the
normalized DSM are displayed in Figure 2.10.
50

Figure 2.10. 3D visualization of final DTM (left) and normalized DSM (right) with2 times exaggeration in elevation from planar-fitting segmentation
In the normalized DSM, it can be seen that there are wall-like boundary regions.
These regions are caused by the different size of the DTM and the DSM. The size
difference exists as a consequence of point loss during LIDAR segmentation.
2.2.2.3. Height-jump Segmentation
An important kind of information delivered in LIDAR data is expressed in the
form of changes among data distribution. For example, a person can distinguish
roads, buildings, and trees from a photograph because he can differentiate spectral
changes of these objects. For a computer vision system, it is important to detect
changes among data under certain criteria. This rationale can also be applied to
LIDAR data segmentation. LIDAR data captures height information of the earth’s
surface. It can be observed that large changes within the elevation data indicate
changes of objects or structures. This observation is the basis of the height-jump
segmentation algorithm. The flow chart of this method is shown in Figure 2.11.
51
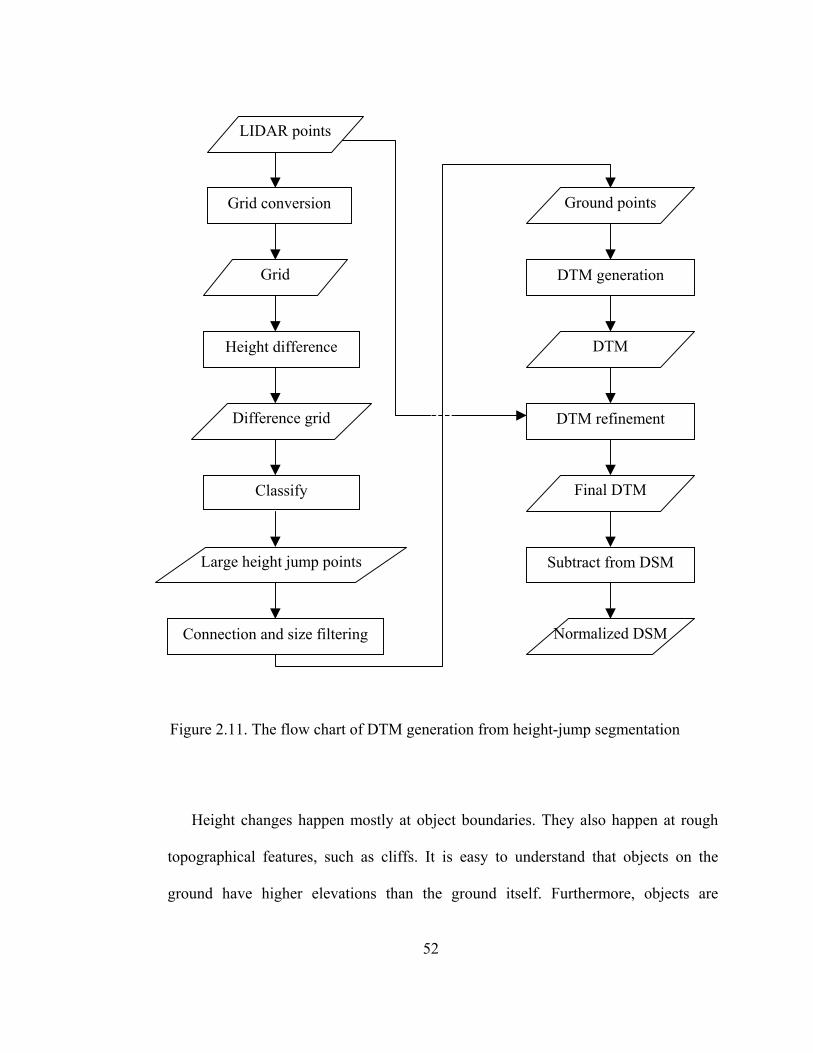
Normalized DSM
Grid
Grid conversion
LIDAR points
Subtract from DSM
DTM generation
Ground points
Connection and size filtering
Large height jump points
Final DTM
DTM refinement
DTM
Classify
Difference grid
Height difference
Figure 2.11. The flow chart of DTM generation from height-jump segmentation
Height changes happen mostly at object boundaries. They also happen at rough
topographical features, such as cliffs. It is easy to understand that objects on the
ground have higher elevations than the ground itself. Furthermore, objects are
52

isolated by large height-change points. This forms the major tasks of the height-jump
segmentation algorithm, to detect boundary points from height changes and to detect
connected regions separated by large height change points.
The question is, what is the height threshold to detect height-jump points? The
solution is determined by the vertical accuracy of LIDAR points, its point density or
the resolution of LIDAR grid data, topographical changes of the ground, and real
object heights. First of all, the height difference should be significantly larger than the
data vertical error. Otherwise, change information is at the same level as data error.
Signal-to-noise ratio is too small to correctly extract information. If the height
difference is larger than 3 times the vertical error, we have approximately 98 percent
confidence to conclude that the difference is caused by an actual physical elevation
change based on the assumption that the error follows a normal distribution.
How do data resolution and ground topography affect height difference? The
criterion is to differentiate the height difference caused by objects from the height
difference caused by topographic change. Figure 2.12 illustrates the relationship
among data resolution, topography, and objects. In Figure 2.12, h represents the
height change introduced by a terrain surface with a slope angle of α ; R is the
resolution of the grid DSM while H is the height of an object. H should be
significantly larger than h in order to distinguish H out of h’s. Thus, with an
estimation of the largest terrain slope within a study area, a height threshold of
minimal H can be calculated. For instance, a system can use double h as the minimum
53
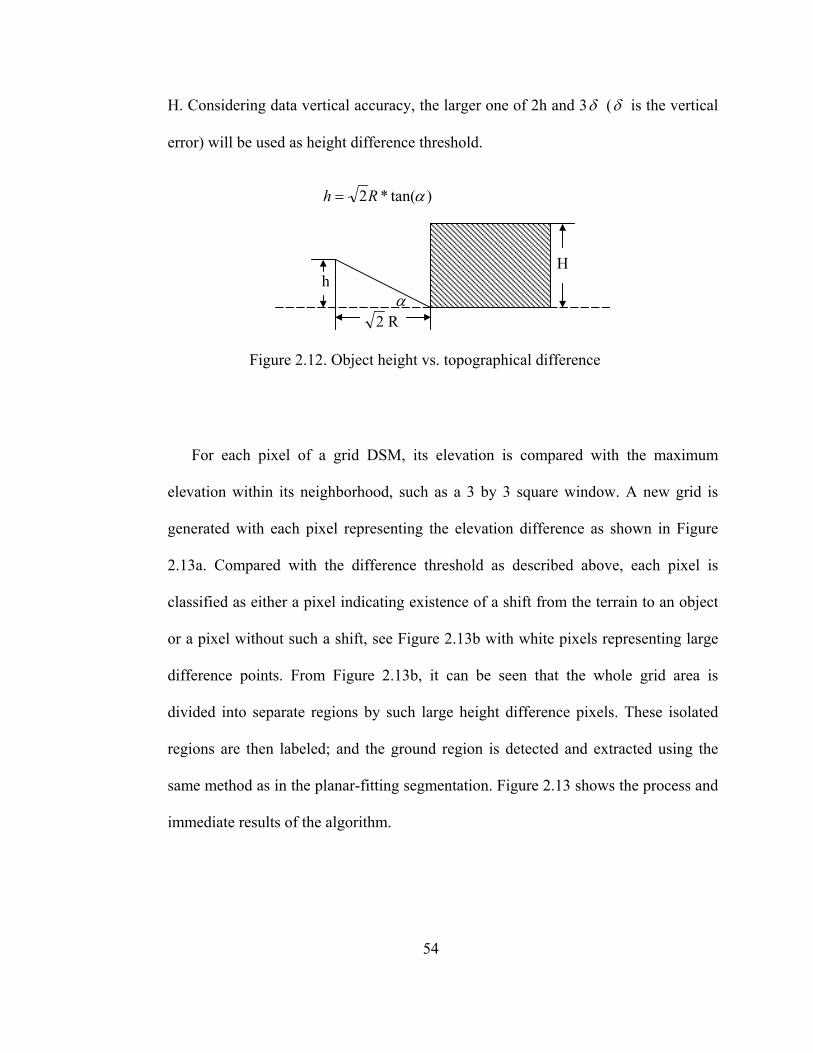
H. Considering data vertical accuracy, the larger one of 2h and 3δ (δ is the vertical
error) will be used as height difference threshold.
α2
)tan(*2 αRh =
R
Hh
Figure 2.12. Object height vs. topographical difference
For each pixel of a grid DSM, its elevation is compared with the maximum
elevation within its neighborhood, such as a 3 by 3 square window. A new grid is
generated with each pixel representing the elevation difference as shown in Figure
2.13a. Compared with the difference threshold as described above, each pixel is
classified as either a pixel indicating existence of a shift from the terrain to an object
or a pixel without such a shift, see Figure 2.13b with white pixels representing large
difference points. From Figure 2.13b, it can be seen that the whole grid area is
divided into separate regions by such large height difference pixels. These isolated
regions are then labeled; and the ground region is detected and extracted using the
same method as in the planar-fitting segmentation. Figure 2.13 shows the process and
immediate results of the algorithm.
54

dc
b
dc
ba a
Figure 2.13. Process results of height-jump segmentation algorithm: a)
calculated height difference; b) classified large-difference points (white); c) isolated regions (white); and d) the detected ground region (white)
The ground region can be detected automatically. One straightforward way to
achieve this goal is to extract the ground as the region with the largest area. This
method is based on the observation that the largest connected ground region is usually
the largest object within an urban or a suburban area. Another approach is to compare
the elevation of each region with its adjacent regions. Across each sharing boundary
segment, the ground region should be lower than its adjacent regions. This is based on
the assumption that all objects are sitting on the ground and thus they are higher than
the ground. The first method is simple to implement. However, some small isolated
55

ground regions, such as a yard surrounded by buildings, cannot be detected. The
second approach can detect small ground regions, but it can also include some
isolated lower roof regions surrounded by higher roof regions. In addition, the second
method is complicated in comparing adjacent regions.
The extracted ground region is used to retrieve ground LIDAR points. Ground
points are then used to generate a DTM through a TIN model. As with the planar-
fitting algorithm, the generated DTM can be improved by including more ground
points. Using the same method as described in the planar-fitting segmentation
algorithm, new ground points are added to the DTM iteratively by comparing LIDAR
points’ elevations with the DTM. After a pre-set number of iteration is finished or
until no significant number of new points can be detected, the DTM refining is
stopped. Consequently, a finalized DTM is generated. Figure 2.14 shows two 3D
scenes displaying the DTM and the normalized DSM, which is generated by
subtracting the DTM from the DSM.
Figure 2.14. DTM and normalized DSM from height-jump segmentation
56
2.2.3. Comparison
LIDAR segmentation algorithms are all application-dependent. That means
algorithms are implemented based on an analysis of specific data sets. There is no such
algorithm that can be pre-set to apply to all kinds of LIDAR data under any conditions.
The characteristics of data should be analyzed before any segmentation algorithm can be
applied.
Morphology method needs prior knowledge about the maximal non-ground object
size in order to determine a moving window’s size. This is a disadvantage of morphology
operators. In addition, large non-ground objects are common in LIDAR sets so that a
large window size is required in order to correctly remove non-ground objects. At the
same time, a larger window will produce a smoother result. In many cases, this will
remove fine features and change the topography dramatically. This will make it very
complex and difficult, even impossible, to recover the topography. However, morphology
operators are easy to understand and simple to implement. In urban or suburban areas
without large topographic changes, this group of operators can work well in LIDAR
segmentation to obtain a good approximation of the terrain.
The planar-fitting algorithm is based on the assumption that the ground surface can be
observed as a planar surface considering the tolerance from data errors. It requires the
setup of the planar-fitting threshold, which is based on data errors, topography, data
resolution, and the roughness of a terrain. And sometimes it needs analysis of the
minimal height of the objects within a study area. However, these requirements are easy
to meet in applications especially for urban and suburban areas. The advantage is this
57

method can keep important ground linear features as long as a feature is continuous
across the data coverage. For example, a freeway intersection can be correctly classified
onto the ground. On the other hand, if an application doesn’t want the freeway
intersection in the ground, this becomes a disadvantage. A further process or new
algorithm should be developed to handle this. Compared with morphology operators, this
algorithm keeps the topography much better; thus, it is faster to recover the final DTM by
tracking back excluded ground points during the process at the beginning.
The height-jump algorithm is based on the observation that non-ground objects are
higher than their neighboring or surrounding ground, and their boundaries have
significant height difference from the ground. In practical applications, this method
should be applied with analysis of the topographic characteristics and data resolution. A
building object may be connected to a large-slope ground in a coarse resolution data.
Similar to the planar-fitting algorithm, this algorithm can keep fine ground linear features
as long as the features are not broken down. Compared with the planar-fitting algorithm,
the height-jump algorithm doesn’t have requirements for the roughness of a terrain while
it has requirements for terrain slopes. The planar-fitting algorithm doesn’t require the
terrain slope to meet certain condition, but it does have requirements for the terrain
roughness.
The differences among three algorithms of LIDAR data segmentation in this research
are reflected in the detection of the ground region, which is an initial DTM. The
following DTM refinement processes are the same. They all compare the original LIDAR
point data with the generated DTM to include more ground points so that the quality of
58
the DTM can be improved because more ground points provide more information about
the terrain. Different interpolation methods can be applied to the same ground data to
generate different quality DTM and normalized DSM. The method used in this research
is a TIN model, which is a linear interpolation. Based on analysis of terrain
characteristics, complex methods such as B-spline surface or the Kriging method can be
utilized to generate more accurate results. But the rationale or the philosophy related to
this research topic is the same.
2.3. Building Detection from Normalized DSM
After a normalized DSM is generated, non-ground objects such as buildings and trees
are observed as sitting in a level plane. In reality, errors are always inevitable. Even
though errors exist, the observation still makes sense from the data point of view. By
segmenting a normalized DSM using a height threshold, trees and building can be
distinguished out of the normalized DSM. A height threshold is determined from a prior
knowledge of the minimum height of objects the application wants to detect. For
example, a threshold of 3 meters can be used to detect buildings while eliminating other
objects like cars and bushes. In this research, the focus is to detect buildings from LIDAR
data, so a threshold of 3 meters is employed. Consequently, objects like cars and bushes
were eliminated while large trucks and some trees are kept from such a height threshold.
Other measurements or derived texture can be applied together with height information to
differentiate building from other objects. For example, shape measurements like
parallelism and size can be used to separate buildings and trees.
59

To reconstruct building models, buildings should be separated from other objects,
most likely trees, and be identified in order to derive parameters of building models. By
analyzing the characteristics of trees and buildings, we can find that they demonstrate
different spatial distributions and patterns as illustrated in Figure 2.15. It is true that
different objects can always be separated as long as sufficient information is available. In
the following discussion, the focus is how to separate buildings from trees.
Figure 2.15. Objects (buildings and trees) detected as objects higher than 3 meters
60
Buildings can be separated from trees because they have different characteristics.
With sufficient information, we can totally differentiate them. The questions are: what
kind of information do we need? And what kind of information can we obtain from a data
set? From elevation data, we can see that buildings and trees have different shapes, sizes
and elevation distribution patters. Usually buildings have regular shapes, such as
perpendicularity and parallelism. Their boundaries are straight line-segments or curves
that can be described as mathematic equations like one or half circle. Most buildings have
parallel boundaries, which means two consecutive boundary segments are perpendicular
to each other. Individual trees usually have random boundaries. Thus parallelism can be
utilized to differentiate some buildings from trees but not all of them. The reason is some
buildings have curved boundaries.
Before separating objects, objects themselves should be detected and labeled first.
After the height threshold was applied to a normalized DSM, building-like objects were
detected. See Figure 2.15. They are called “building-like” objects because they are
merged with buildings and buildings can only be detected through further processing.
First of all, all connected regions are extracted and assigned a unique label. The
connection is detected based on 8-neighbor connection relationship. At the same time, the
pixel number of each connected region is calculated. This produces the histogram in the
resulted image. Then, a prior knowledge of the minimal building size is used to eliminate
all objects with an area smaller than the minimum building size. After the elimination,
objects remaining are mostly buildings. Figure 2.16 shows the result after an elimination
using a minimum building size of 100 m2. Due to some noisy points adjacent to
61

buildings, detected building regions may have ragged boundaries. To smooth the
boundaries, a morphology close operator was applied to the resulted grid. This operator is
comprised of a dilation operator followed by an erosion operator.
Figure 2.16. Regions detected as buildings using the size threshold
The size threshold can dramatically reduce the number of objects remaining within
the resulted grid. However, size measurement alone cannot differentiate all buildings and
trees. Some trees have areas larger than the minimum building size, for example, large
trees and a group of trees. In addition, some trees are adjacent to buildings; and thus they
62
are connected to their adjacent buildings. If trees are connected with buildings, it will
introduce blunders in reconstructed building models. Thus, additional information or
measurements should be used to further classify buildings and trees.
In the real world, the elevation distribution of human made objects like buildings has
regular patterns. People can observe that most of buildings have roofs comprised of
planar facets. Such roofs can be represented as a planar facet. Thus the elevation of a
point on a planar roof can be predicted from the plane formed by its neighboring points.
On the other hand, trees usually have irregular elevation distribution patterns. This
distribution difference can be utilized to differentiate buildings from trees. One
measurement could be the distribution of slopes. Points on a building roof will form an
approximate homogeneous slope region except for its boundary, while points on top of a
tree will form a heterogeneous slope region due to random distribution of point
elevations. A second texture can be planar fitting difference as used in detecting ground
region in the previous section. The fitting difference or variation can be used to detect
planar-roof buildings.
The planar fitting measurements and the slope measurement are all based on point
elevation distribution. Internally, they will produce similar results. Since the planar fitting
difference image was already generated in DTM generation, this difference data will be
used to separate buildings from trees.
The size, slope, fitting difference, and height measurements are constraints applied to
differentiate buildings from trees. Each constraint can be used individually and the passed
results are the regions detected as building by that constraint. Each result can be treated
63
as a set. The intersection of the sets will be considered as building regions. Intersection
operator will eliminate those building regions not detected by one of the constraints. Thus
the constraints should be relaxed. It is preferable to get class I (commission) error instead
of class II (omission) error. That means buildings should be detected maximally at the
cost of trees surviving in one constraint test. Commission errors can be reduced by
applying other constraints later on, while omission error is difficult to reduce because
buildings that failed to pass a test are eliminated.
In detecting buildings with LIDAR data, a challenging problem is how to separate
large trees adjacent to buildings. After elevation and size constraint tests, these trees will
exist because they connect to building regions and are detected as a whole object. The
planar fitting algorithm demonstrates its advantage in differentiating between these two
different objects. The method produces more precise building objects by eliminating the
tree areas connected to buildings. Figure 2.17 shows an example.
In Figure 2.17, the image on the left shows a DSM generated from LIDAR points. It
can be seen that there are trees surrounded by one building and these trees are connected
to the building. The image in the middle shows the objects detected after a height
threshold was applied to the normalized DSM. It is obvious that these trees survived in
the height constraint. It is clear that a size constraint cannot remove these trees because
they are connected to the building and form a sufficiently large object to pass the test of
the size threshold. The image on the right presents the result after a planar-fitting
algorithm was applied to the DSM together with size constraint. It can be seen that trees
were removed because their heights cannot pass the planar-fitting constraint. The
64

structure of the building is correctly recovered. It can also be seen from the right image
that the skeleton of the building is thinner than the ones in the left and the middle images.
This is caused by the planar-fitting algorithm because boundary points of planar surfaces
cannot pass the test of the planar surface test. A further process is needed to compensate
for the loss. For example, a morphology dilation operator can be applied to widen the
building region.
Figure 2.17. Separation of buildings and trees using planar fitting difference
2.4. Analysis and Conclusion
DTM generation and building detection from LIDAR data are application-dependent
processes. The results and the accuracy depend on data quality and the characteristics of
an application area under study. Data resolution/density and data accuracy can
dramatically affect the results. The topography of a study area also plays an important
role. However, the algorithms presented in this chapter can be applied to most urban and
suburban areas. The height-jump algorithm can even be applied in forestry areas for
DTM generation and forest study.
65

66
The building detection algorithm proposed in this research is a new method. It should
be noted that this method is not supposed to detect every kind of buildings to every detail.
Actually, no building detection algorithm is capable of detecting all kinds of buildings. In
this research, buildings with arch roofs cannot be detected because they cannot meet the
planar surface requirement. In addition, some small structures like dormers on buildings
cannot be detected because they are too small given a data resolution of 1 meter.
CHAPTER 3
BUILDING MODEL RECONSTRUCTION
Building model reconstruction is a process to derive or calculate CAD building
models, which are of vector format. In this chapter, the primitives of a building model,
which are roof faces of a building, will be detected and their parameters will be
calculated. Topological relationship of primitives will be analyzed afterward to obtain
correct building model topology, followed by analysis of building model spatial or
geometric characteristics to reduce effects of errors propagating from the proposed
process sequence.
3.1. Conventional Terms
Building boundary: A building boundary in this part refers to the outline of a
building footprint on the ground. It is a series of line segments in a 2D space. It is
a close 2D polygon.
Boundary regularization: A building boundary is assumed to have a rectangular
shape in this study. Boundary regularization is the process to adjust a building’s
67

boundary into a 2D polygon with a rectangular shape. After regularization, two
consecutive line segments in a building boundary are perpendicular to each other.
3.2. Boundary Extraction and Regularization
Based on their imaging geometry, neither LIDAR data nor optical imagery can
capture or observe every structure of a building. The common missing information is the
vertical walls of a building. Some vertical walls cannot be observed by imaging sensors.
Thus, there are no measurements for these vertical walls. During the conversion from
LIDAR point data to grid DSM, available vertical measurements, if any, were lost. One
method could be going back to the original LIDAR data to recover the lost vertical wall
information. However, this method still cannot recover information about vertical walls
not captured in original point data.
In the real world, we can observe that almost every building is surrounded by vertical
walls. In other words, vertical walls form the boundary of a building. Thus, the boundary
of a building indicates existence of vertical walls. In this research, vertical walls will be
recovered from building boundaries. Another observation is that boundary segments of a
building, or vertical walls of a building, are perpendicular to each other. Two connected
vertical walls form a right angle. Thus an assumption is made in this research to
reconstruct building models. The assumption is that all boundary segments of a building
are perpendicular to each other. In other words, buildings have rectangular-shaped
boundaries. Buildings with arch boundaries will not be modeled in this research. Instead,
they are forced to have rectangular boundaries.
68
Before the roofs of a building are reconstructed, vertical walls will be recovered.
Thus, the boundary of a building will be extracted and then be regularized. Due to errors
within LIDAR data, also because of data resolution, detected building regions have noise
in their boundaries. One obvious distortion is that a straight line segment of a building
has ragged small line segments. In addition, consecutive segments are not perpendicular
to each other. So methods are needed to generalize line segments and to adjust them to
have right intersection angles. This is the purpose of building boundary regularization.
In this research, a refined version of the so-called “sleeve” method is first employed
to generalize boundary segments so that redundant points will be discarded. Then, a new-
developed regularization method is applied to adjust the generalized segments to be
perpendicular to each other.
The boundary of a building is first extracted and recorded as an ordered sequence of
points. Several commercial programs provide this function, such as ERDAS Imagine.
Figure 3.1 shows an example of extracted vector building boundaries.
69
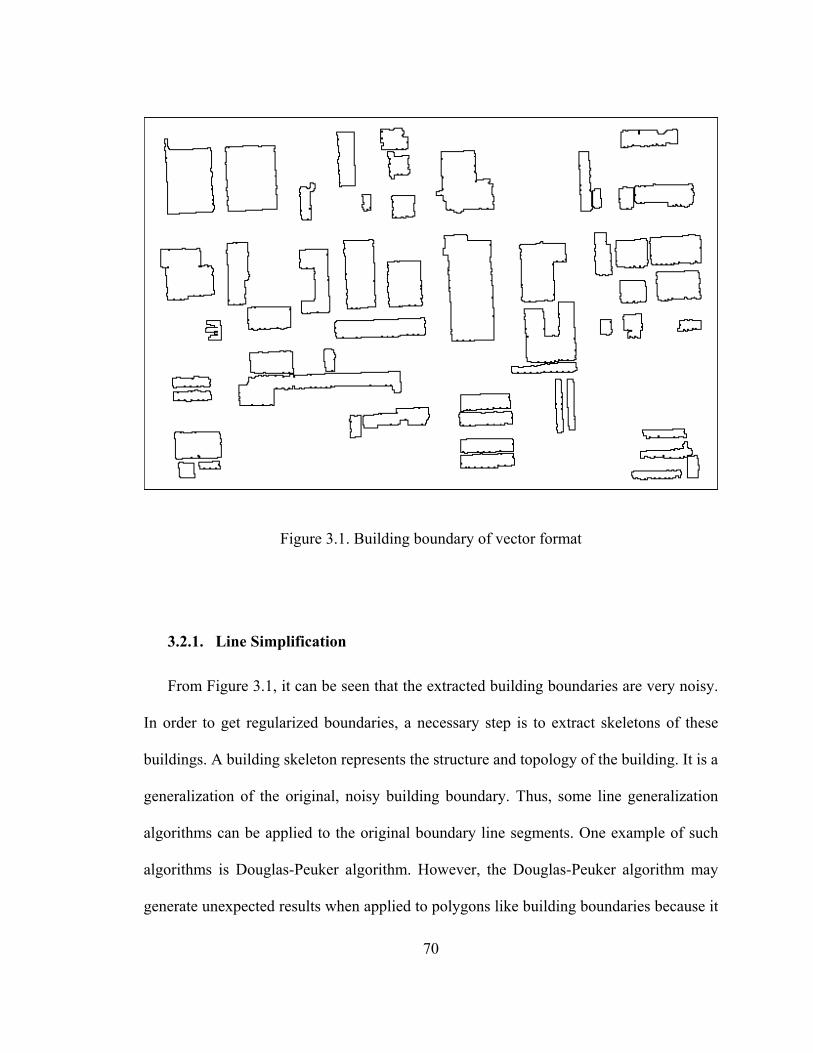
Figure 3.1. Building boundary of vector format
3.2.1. Line Simplification
From Figure 3.1, it can be seen that the extracted building boundaries are very noisy.
In order to get regularized boundaries, a necessary step is to extract skeletons of these
buildings. A building skeleton represents the structure and topology of the building. It is a
generalization of the original, noisy building boundary. Thus, some line generalization
algorithms can be applied to the original boundary line segments. One example of such
algorithms is Douglas-Peuker algorithm. However, the Douglas-Peuker algorithm may
generate unexpected results when applied to polygons like building boundaries because it
70
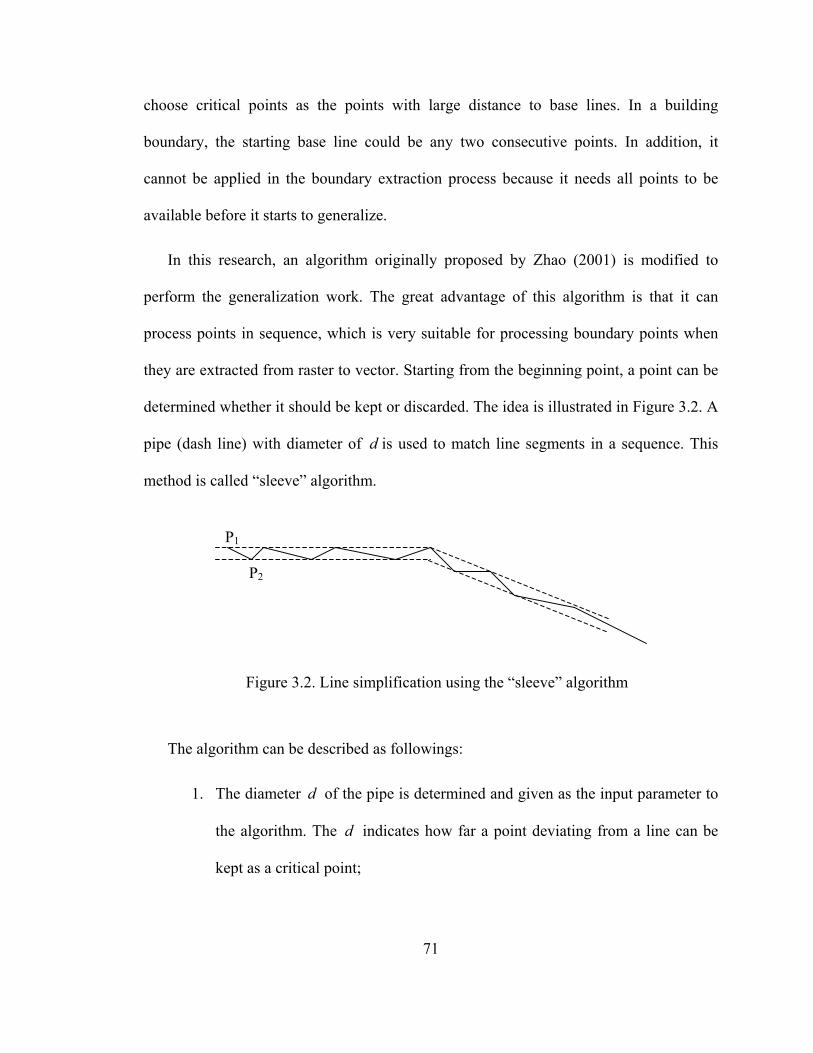
choose critical points as the points with large distance to base lines. In a building
boundary, the starting base line could be any two consecutive points. In addition, it
cannot be applied in the boundary extraction process because it needs all points to be
available before it starts to generalize.
In this research, an algorithm originally proposed by Zhao (2001) is modified to
perform the generalization work. The great advantage of this algorithm is that it can
process points in sequence, which is very suitable for processing boundary points when
they are extracted from raster to vector. Starting from the beginning point, a point can be
determined whether it should be kept or discarded. The idea is illustrated in Figure 3.2. A
pipe (dash line) with diameter of d is used to match line segments in a sequence. This
method is called “sleeve” algorithm.
P1
P2
Figure 3.2. Line simplification using the “sleeve” algorithm
The algorithm can be described as followings:
1. The diameter d of the pipe is determined and given as the input parameter to
the algorithm. The indicates how far a point deviating from a line can be
kept as a critical point;
d
71

2. Starting from the first two points P1 and P2, the direction 0β and length of
the line connecting these two points are calculated;
0l
3. Perpendicular to the current line segment (the line P1P2 at the beginning), the
direction range 0α at current point Pi (the second point P2 at the beginning) is
calculated according to the line segment length and d . The 0α is an angle
range 00 αβ ∆± and 0α∆ is calculated as )2arctan(0l
d ;
4. Next point Pi+1 is connected with the starting point P1 to form a new segment,
and its direction β and length l are calculated. In addition, a new direction
range α is calculated as αβ ∆± with )2arctan( ld=∆α ;
• If the direction β is within the calculated direction range 0α , the current
point Pi is discarded because it is not a critical point. Then a new direction
range at the point Pi+1 is generated as the intersection of the new direction
range α and the current direction range 0α . The new range 0α for
further testing is [max( 00 αβ ∆− , αβ ∆− ), min( 00 αβ ∆+ , αβ ∆+ )]. Go
back to step 3;
• If the new direction β is out of the direction range 0α , the current point Pi
is kept in the generalized line as a critical point. The current point Pi is
taken as the first point of a new line segment and the point Pi+1 is taken as
the second point for next generalization process. Repeat procedure 1 to 3
till the last point.
72

The advantage of the “sleeve” algorithm is that it can process points in a dynamic
manner. It is not necessary to wait until all points are available before processing. This
method is suitable for building boundary generalization because it can generalize the
boundary points when these points were traced. However, one special process should be
applied to building boundary generalization using the “sleeve” algorithm. A building
boundary is a close polygon. The starting point could be any point on a boundary
depending on the scanning process during the conversion from raster boundary to vector
boundary. In addition, the staring point is the ending point in a vector building boundary
polygon.
In order to apply the “sleeve” algorithm in generalizing building boundaries, two
refinements were applied to the original algorithm. The first one is to process the ending
point of a boundary. After the regular “sleeve” algorithm was performed, the starting and
the ending points in the original polygon were kept. These two points are actually the
same point. It is compared with the line formed by the second point and the second to the
last point. If the distance from the point to the line is larger than the distance tolerance d ,
the starting and the ending points are kept. Otherwise, if the point to line distance is
smaller than the distance tolerance, the original starting and ending points will be
discarded. In this case, either the second point is taken as the ending point, or the second
to the last point is taken as the starting point.
The second refinement is to improve the accuracy of generalized line segments. In the
original “sleeve” algorithm, all intermediate, non-critical points were discarded. In
reality, these discarded points also provide useful information. In this research, all
73

intermediate points of a line segment are used to derive parameters of the line using a
least square regression model. In this case, consecutive lines will intersect with each
other to generate critical points. Most likely, the generated critical points will not be in
the original data set. This intersection method will provide a more accurate result because
it takes much more information into account for calculating a line’s parameters. Figure
3.3 shows the refinement of the original algorithm. The bold line is the calculated one
from all intermediate points using a least-square regression model.
Figure 3.3. Line simplification using the refined “sleeve” algorithm
The parameter to be set up in this algorithm is the distance threshold, which can be
adjusted according to specific situations. Figure 3.4 depicts a simplification result using
this refined “sleeve” algorithm. The original boundary is the one extracted from a
building region in raster format.
74

Figure 3.4. Line simplification: The graph on the left shows the original line
segments. The squares are the remaining points after the simplification. The right one shows the simplified line segment
3.2.2. Boundary Regularization
The purpose of regularization is to adjust the boundary of a building to have a
rectangular shape. All line segments are either perpendicular to, or parallel to each other.
To eliminate noise effects and to get parallel or perpendicular boundary segments, some
researchers used the Minimum Description Length (MDL) method to regularize ragged
building boundaries (Weidner and Förstner, 1995). MDL is a statistical method, and it is
very expensive in computation due to iterative comparison. Mayer (2001) used a
constrained active contour method in optimizing building boundaries. However, the
constrained active contour needs a good initial approximation of a boundary. In addition,
it cannot merge or eliminate small line segments. Besides, the image used in the study
should provide sharp boundaries, which is difficult in LIDAR DSM. In this study, a new
regularization method was developed to get rectangular-shape building boundaries.
75
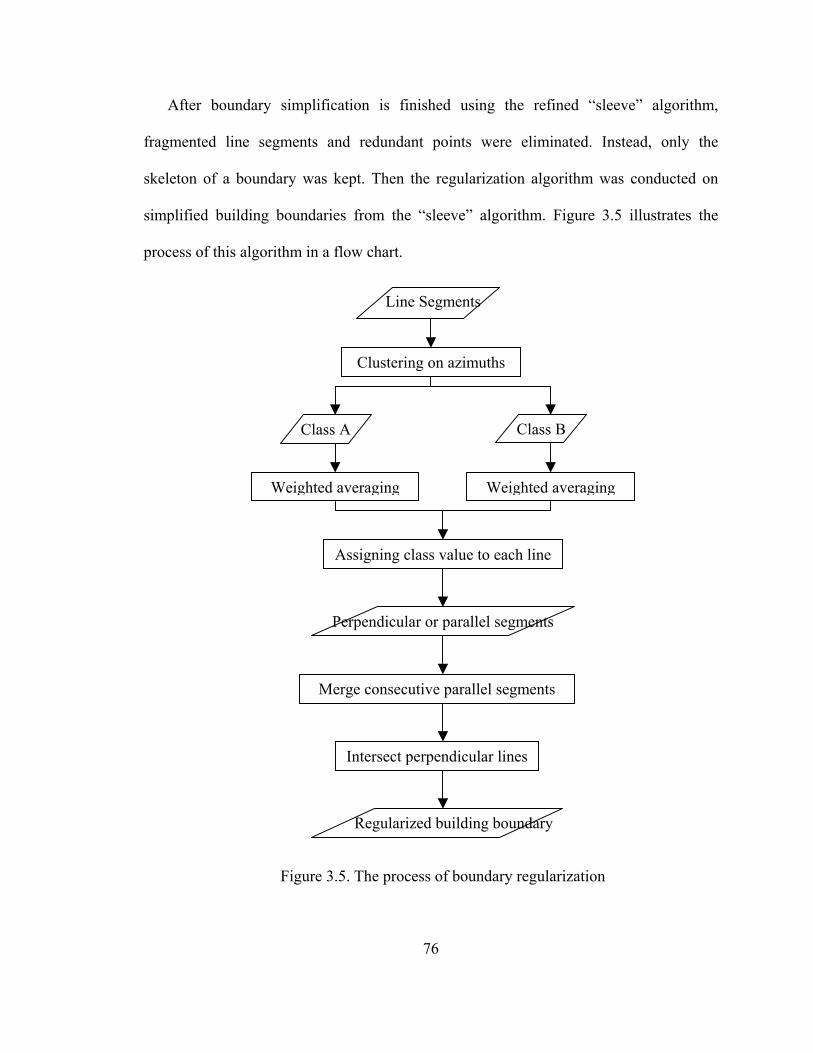
After boundary simplification is finished using the refined “sleeve” algorithm,
fragmented line segments and redundant points were eliminated. Instead, only the
skeleton of a boundary was kept. Then the regularization algorithm was conducted on
simplified building boundaries from the “sleeve” algorithm. Figure 3.5 illustrates the
process of this algorithm in a flow chart.
Regularized building boundary
Intersect perpendicular lines
Merge consecutive parallel segments
Perpendicular or parallel segments
Assigning class value to each line
Weighted averaging
Class B Class A
Weighted averaging
Clustering on azimuths
Line Segments
Figure 3.5. The process of boundary regularization
76

The proposed algorithm is comprised of a cluster process and an adjustment process.
The cluster method is similar to k-means method. It is described in the first item of the
following paragraph. The whole algorithm is described as followings:
• The azimuth of each line segment of a building boundary was calculated, and all
segments were clustered into two classes according to their azimuths. The
criterion used here was inter-class distances. A segment was classified into class
A if the difference between its azimuth and the averaged azimuth of class A was
smaller than the difference between its azimuth and the averaged azimuth of class
B. The result of this step is two groups of line segments, and they are supposed to
be perpendicular to each other;
• For each segment class, the weighted average of line azimuths was calculated.
The weight used for each line segment is its length:
∑∑=
i
ii
lazimuthlazimuth * , li is the length of ith segment in one class. This
matches the observation that a longer line segment has higher azimuth accuracy
than a shorter line segment provided that the position accuracy of end points is the
same. The output of this step is two azimuths that are supposed to be
perpendicular to each other;
• A weighted adjustment using the Gauss-Markov model was carried out to make
the azimuths of these two classes perpendicular. Again, the weight was calculated
as the total length of all segments in each class. After the adjustment, these two
azimuths assigned to two classes are perpendicular;
77
• Each segment is adjusted in such a way that it is rotated around its central point
until it has the azimuth of its class. Up to this point, all line segments of a building
under investigation are parallel or perpendicular to each other;
• Adjacent parallel segments are merged to form one new line segment. The new
line passes a calculated central point, which is a weighted average of central
points of the merged adjacent segments. The weights are lengths of the merged
segments. For example, the x coordinate from two merged adjacent parallel lines
can be calculated as )()(
21
2211ll
xlxlx +∗+∗= . For segments parallel to each
other but not adjacent, if the distance between them is smaller than a pre-defined
threshold, they were adjusted in a similar way to pass through the same line. But
they are not merged, so they are still two different line segments. The threshold is
an experimentally determined value, 2 meters was employed in this study, which
corresponds to two pixels in grid DTM;
• Regularized building boundaries were calculated by intersecting adjacent line
segments.
Figure 3.6 shows an instance of building boundary regularization using the method
described above. The advantage of this method is that it takes information from all lines
into account by calculating and adjusting azimuths using line segment lengths as weights.
This method agrees with the fact that a longer segment has better azimuth accuracy given
the end point position accuracy. Figure 3.7 presents regularized building boundaries
overlapping with the LIDAR DSM.
78
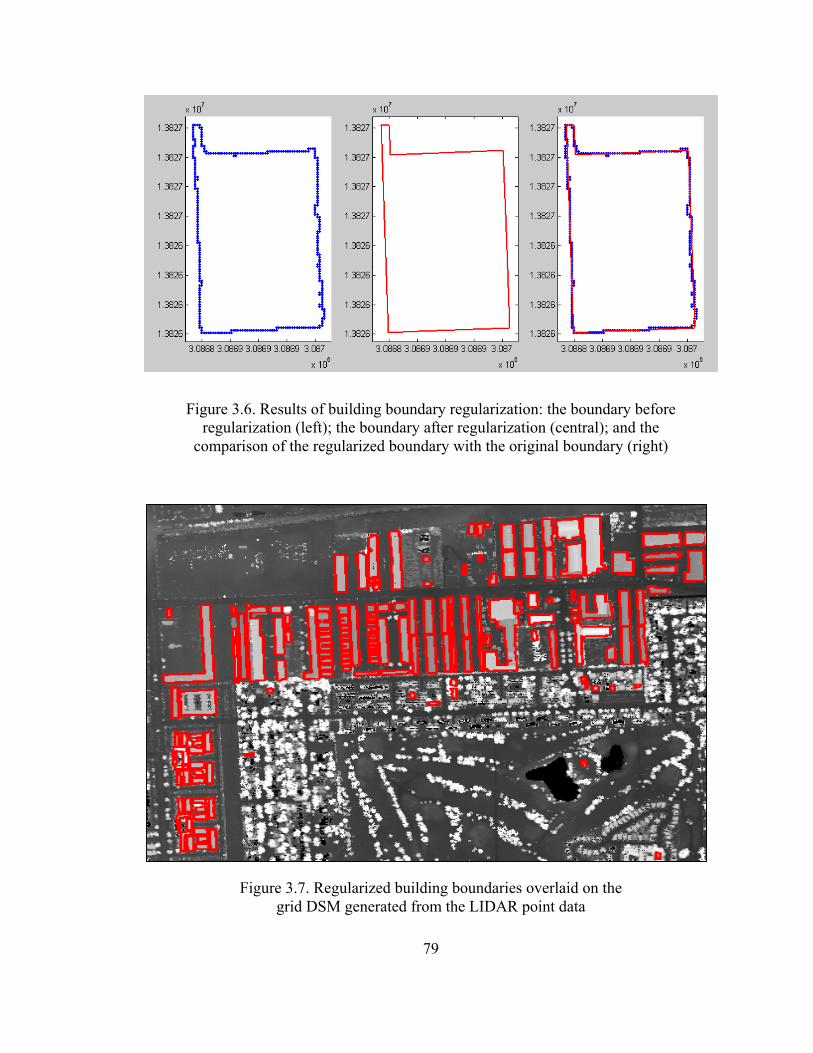
Figure 3.6. Results of building boundary regularization: the boundary before regularization (left); the boundary after regularization (central); and the
comparison of the regularized boundary with the original boundary (right)
Figure 3.7. Regularized building boundaries overlaid on the
grid DSM generated from the LIDAR point data
79

Compared with the MDL method, the proposed regularization method is efficient in
computation. It follows a schema from top to bottom. It finds out the general picture of a
building boundary; then it refines details of the boundary. In this way, it achieves a
globally optimized result.
3.3. Building Model Reconstruction
After the boundary of a building is extracted, a 3D model can be reconstructed from
LIDAR points falling within the building footprint. The process of 3D building model
reconstruction is to derive 3D building CAD models. Generally, there are two basic
approaches to building model reconstruction. One is model based, and the other is data
based. The former one has a database of known building models. A known building
model has available building structures with fixed topology. Thus, the parameter needed
to be calculated is its geometry. This type of method can only work with buildings that
match the models in the model database.
The data-driven approach usually assumes that a building is a polyhedral model,
which is comprised of a group of connected planar surfaces. The tasks are to derive the
topology and to intersect the planar roofs of a building to calculate model parameters.
This approach is flexible in working with different types of building models.
Theoretically, it can reconstruct all kinds of planar-roof buildings because it doesn’t
require prior knowledge about a building’s structure. Some researchers combined the
data-driven method and the model-driven method to take advantages of both approaches.
This combined method is referred as the CSG (Constructive Solid Geometry) method. In
80
the CSG method, a complex building model is decomposed into small building
primitives. These building primitives are stored in a primitive database. Each
decomposed component of a building model is matched with one primitive in the
database; and its geometric parameters are calculated. In the CSG approach, only a
limited number of building primitives are stored in the database, but a large number of
building models can be reconstructed by composing a group of such primitives. However,
the decomposition is usually very tricky.
The algorithm proposed in this research is a data-driven approach instead of a model-
driven approach, which means no a priori knowledge about a specific building model is
required. The assumption made here is that a building is a polyhedral model, which is
comprised of planar surfaces. This approach can theoretically handle most buildings
because most buildings are encompassed by planar surfaces in the real world. Each
surface in such a model is a model primitive. The mission for a building reconstruction
thus becomes detecting and reconstructing building roof primitives. Vertical walls can be
derived from building boundaries. Some researchers have presented their works on
building reconstruction using LIDAR data.
Maas and Vosselman (1999) proposed two algorithms to reconstruct 3D building
models using model-driven and data-driven approaches. They applied invariant moments
to reconstruct simple rectangular shaped buildings using model-driven approach. The
invariant moments cannot be applied to complex buildings. For generic data-driven
model reconstruction, they applied Hough-Transform to detect planar roof surfaces.
Points were organized into a TIN model. One triangle is a plane in 3D; and its plane
81

parameters were used to vote in the Hough parameter space. Vosselman (1999) also used
Hough-Transform to detect planar roofs. However, there are several drawbacks using
Hough-Transform in roof detection: 1) the computation is expensive; 2) the interval in
the parameter space is difficult to determine. A smaller interval will generate a higher
accuracy result but the computation is more expensive; a larger interval decreases the
computation but it generates a lower accuracy result; 3) the peak points in the parameter
space are difficult to detect; and further process is necessary for peak point detection. For
example, the entry with the second largest vote in the parameter space usually does not
represent a second roof of a building. It usually comes from the points contributing to the
first roof. Some algorithms can be applied to detect local peaks in order to correctly
detect roofs. However, this will increase computation load. Another option is to apply the
Hough-Transform algorithm iteratively. Each time only one roof will be detected. Points
contributing to the detected roof(s) will be masked out of the next iteration. Only
remaining points are used to perform Hough-Transform in a next iteration. However,
each of the alternatives will dramatically increase computation load. Even though high
dimensionality Hough-Transform can be implemented on the combination of one-
dimension Hough-Transforms, the right solution out of the combination is still
computation intensive if there are a great number of building LIDAR points, which is
usually the case.
A cluster algorithm, i.e., the k-means algorithm, can also be utilized to detect
buildings roofs based on surface normal data. However, a small horizontal space in high
density LIDAR data will cause its normal data to be very sensitive to noise (Maas and
82

Vosselman, 1999). Thus, a robust filter should be developed to decrease noise effects in
order to use normal data for roof detection.
Some studies were carried out using a region-growth method. Rottensteiner and
Briese (2002) detected seed regions for planar roofs by counting the percentage of “point-
like” points, which were classified using a polymorphic feature extraction based on the
Förstner operator. These seed regions were then compared with adjacent points to grow.
The topology of roofs was generated using a raster Voronoi Diagram. Adjacent co-planar
roof regions were then grouped together; and the roof topology was updated. From the
topology, a building model can be reconstructed by intersecting adjacent roofs.
To avoid direct detection of roofs from LIDAR data, building ground plans can be
utilized to decompose a building into simple building primitives. Such primitives can be
matched with LIDAR points; and their parameters can be calculated from a least square
regression. Finally, a CSG building model is constructed out of the primitives
(Vosselman and Dijkman, 2001; Haala, et al., 1998). Haala, et al. (1998) also used the
relationship between gradient direction and direction of ground plan segments to detect
roofs. This is based on the observation that the normal of a roof is perpendicular to the
bounding line segments of a building. However, the decomposition of the ground plan
could be very tricky sometimes. It may generate primitives that don’t match the models
in a primitive database. As a consequence, wrong models will be generated. In some
cases, the decomposition could generate too many small primitives although these small
primitives are in fact from the same roof.
83
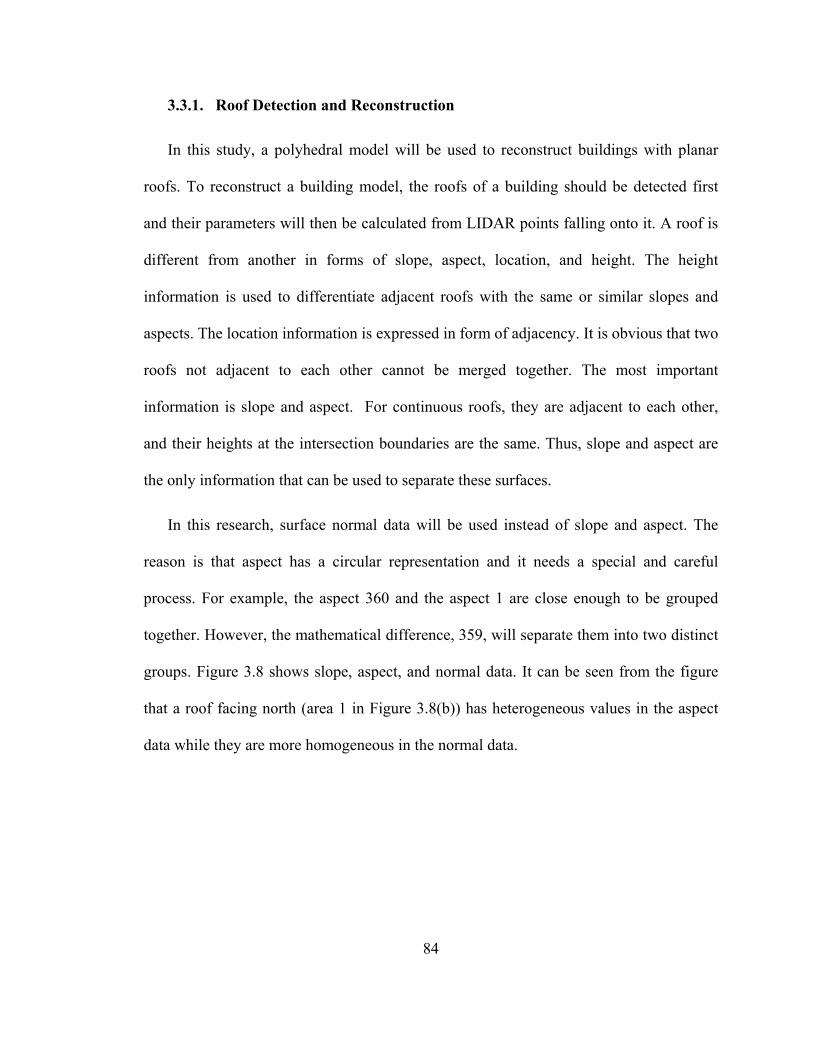
3.3.1. Roof Detection and Reconstruction
In this study, a polyhedral model will be used to reconstruct buildings with planar
roofs. To reconstruct a building model, the roofs of a building should be detected first
and their parameters will then be calculated from LIDAR points falling onto it. A roof is
different from another in forms of slope, aspect, location, and height. The height
information is used to differentiate adjacent roofs with the same or similar slopes and
aspects. The location information is expressed in form of adjacency. It is obvious that two
roofs not adjacent to each other cannot be merged together. The most important
information is slope and aspect. For continuous roofs, they are adjacent to each other,
and their heights at the intersection boundaries are the same. Thus, slope and aspect are
the only information that can be used to separate these surfaces.
In this research, surface normal data will be used instead of slope and aspect. The
reason is that aspect has a circular representation and it needs a special and careful
process. For example, the aspect 360 and the aspect 1 are close enough to be grouped
together. However, the mathematical difference, 359, will separate them into two distinct
groups. Figure 3.8 shows slope, aspect, and normal data. It can be seen from the figure
that a roof facing north (area 1 in Figure 3.8(b)) has heterogeneous values in the aspect
data while they are more homogeneous in the normal data.
84
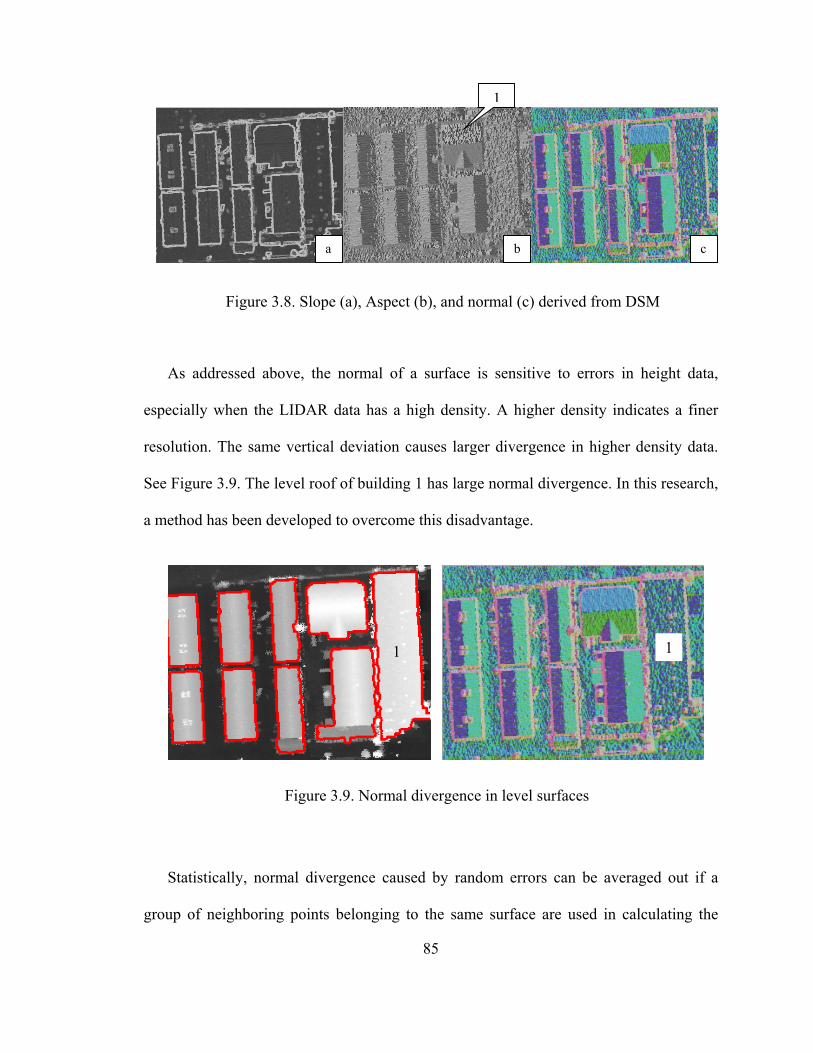
1
cba
Figure 3.8. Slope (a), Aspect (b), and normal (c) derived from DSM
As addressed above, the normal of a surface is sensitive to errors in height data,
especially when the LIDAR data has a high density. A higher density indicates a finer
resolution. The same vertical deviation causes larger divergence in higher density data.
See Figure 3.9. The level roof of building 1 has large normal divergence. In this research,
a method has been developed to overcome this disadvantage.
11
Figure 3.9. Normal divergence in level surfaces
Statistically, normal divergence caused by random errors can be averaged out if a
group of neighboring points belonging to the same surface are used in calculating the
85

normal. Generally, the more points used for calculating normal at each point, the more
consistent the calculated normal is. To calculate normal, a regression plane is used to fit
neighboring points of a point under study. The normal of the fitting plane is taken as the
normal at this point. Although regression calculation can decrease the divergence of
normal data, it is still necessary to be smoothed out for clustering. In this study, a mode
seeking algorithm will be used. This algorithm is the mean-shift algorithm.
3.3.1.1. Mean-shift
Mean-shift is an algorithm for nonparametric density gradient estimation using a
kernel. A mode means a local density maximum. It was first proposed by Fukunaga
and Hostetler (1975) to calculate density gradient. Cheng (1995) further investigated
this algorithm. He proved the convergence of the algorithm and applied it to
clustering. Comaniciu and Meer (2002) further proved its convergence and provided
the sufficient conditions for a mean-shift algorithm to converge. They proved that the
algorithm would converge as long as the kernel applied has a convex and
monotonically decreasing profile. In actual implementation, they argue that
convergence can be achieved if a uniform kernel is applied to estimating density.
They applied the mean-shift algorithm to filtering and segmenting gray scale and
color images.
Given a set of n data points xi (i=1, …., n) in a d-dimensional space Rd, the
multivariate kernel density with a kernel K(x) and a bandwidth matrix H (defined in
equation 3-3) is calculated as
86

∑=
−=n
iiH xxK
nxf
1)(1)( (3-1)
where
)()( 21
21
xHKHxK H = (3-2)
=
2
2
21
0...0............0..00...0
d
i
h
hh
H or (3-3) IhH 2=
The bandwidth matrix H defines how to scale each component of the d-
dimensional variant.
A d-variant kernel K(x) should satisfy
∫
∫=
=
d
d
R
R
dxxxK
dxxK
0)(
1)(
∫
∞∞<
=
0)(
)()(
drrk
xkcxK d
(3-4)
In equation 3-4, k(||x||) is the profile of kernel K(x) and cd is a constant. It is
nonnegative, non-increasing, and piecewise continuous. It relates the kernel to a
function of the 2nd norm of a d-dimensional vector x. Thus, the density gradient can
be estimated as
87

}))((
))((}{))(({
}))((
))((}{))(({1
))(()(1
)())((11)(
1
21'
1
21'
1
21'
1
21'
1
21'
1
21'
1
21'
1
21'
xHxxk
HxxkxHxxk
Hnc
xHxxK
HxxKxHxxK
Hn
HxxKxxHn
xxHxxKHn
xf
n
ii
n
iiin
ii
d
n
ii
n
iiin
ii
n
iii
i
n
ii
−−
−−−=
−−
−−−=
−−=
−−=∆
∑
∑∑
∑
∑∑
∑
∑
=
=
=
=
=
=
=
=
(3-5)
The mean shift refers to the second term in equation 3-5.
xHxxk
Hxxkx
xHxxK
HxxKxxm
n
ii
n
iii
n
ii
n
iii
−−
−=
−−
−=
∑
∑
∑
∑
=
=
=
=
1
21'
1
21'
1
21'
1
21'
))((
))((
))((
))(()(
(3-6)
A function g(x) is defined as g(x)=-k’(x). Consequently, the kernel G(x) is defined
as
)()( xgcxG d= (3-7)
The kernel K(x) is called the shadow of the kernel G(x) (Cheng, 1995; Comaniciu
and Meer, 2002). Thus, the mean shift can be represented as
88

xHxxg
Hxxgxxm n
ii
n
iii
−−
−=
∑
∑
=
=
1
21
1
21
))((
))(()( (3-8)
The shadow of a Gaussian Kernel is also a Gaussian Kernel. The Uniform Kernel
is the shadow of the Epanechnikov Kernel, which is defined as
>≤−
=101)1(
)(xifxifxC
xE d (3-9)
and the Uniform Kernel is defined as
>≤
=101
)(xifxifC
xF d (3-10)
In equation 3-9 and 3-10, the Cd is a constant to normalize the function so that the
integral of the function equals 1. In this study, the mean shift will be used to perform
filtering and clustering of DSM based on surface normal data. The Uniform Kernel
will be used.
In order to apply the mean-shift method to clustering, a feature space need to be
built up first. The advantage of the mean-shift method is that the feature space can be
built simultaneously from spatial information (x, y, and z) and attribute information
(gray values, color information, and texture measurements). Another filter that works
on both spatial domain and attribute domain simultaneously is the bilateral filtering
method (Tomasi and Manduchi, 1998). The difference between the mean-shift
method and the bilateral filtering method is that the former uses a dynamic searching
window while the later uses a static one. Another advantage of the mean-shift method
89
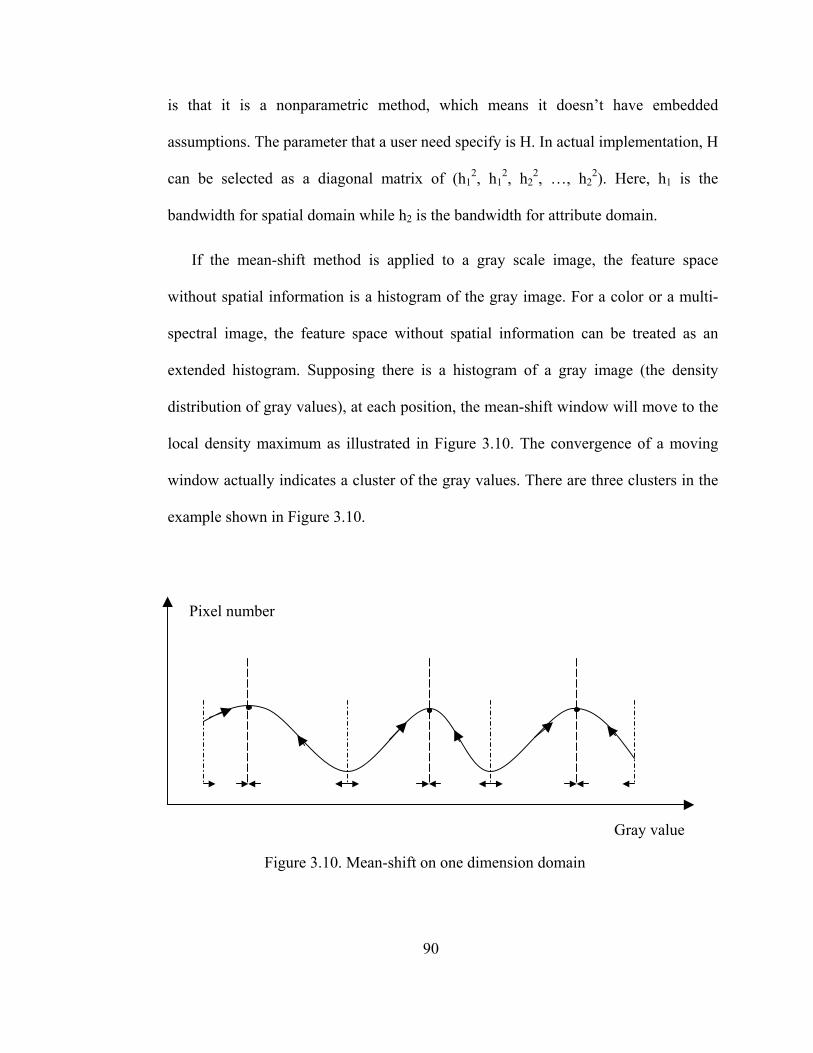
is that it is a nonparametric method, which means it doesn’t have embedded
assumptions. The parameter that a user need specify is H. In actual implementation, H
can be selected as a diagonal matrix of (h12, h1
2, h22, …, h2
2). Here, h1 is the
bandwidth for spatial domain while h2 is the bandwidth for attribute domain.
If the mean-shift method is applied to a gray scale image, the feature space
without spatial information is a histogram of the gray image. For a color or a multi-
spectral image, the feature space without spatial information can be treated as an
extended histogram. Supposing there is a histogram of a gray image (the density
distribution of gray values), at each position, the mean-shift window will move to the
local density maximum as illustrated in Figure 3.10. The convergence of a moving
window actually indicates a cluster of the gray values. There are three clusters in the
example shown in Figure 3.10.
Pixel number
Gray value
Figure 3.10. Mean-shift on one dimension domain
90
As addressed before, the mean-shift algorithm can be applied to spatial domain
and attribute domain jointly. In this case, the bandwidth of spatial domain and the
bandwidth of attribute domain should be selected individually. However, after
normalization, these two domains can be joined together to perform filtering. Figure
3.11 and Figure 3.12 illustrate a feature space before and after a filtering applied to a
gray value image using the mean-shift algorithm. X and Y axes are spatial
coordinates; and the gray axis is image pixel value. It can be seen that the feature
space has a plateau-like shape. After the filtering, the plateau shaped surface is
smoothed out (Figure 3.12).
The general procedure to perform the mean-shift filtering can be summarized as
the followings:
• User inputs of the bandwidths hs for spatial domain and ha for attribute
domain. Build up the feature space F(X|X=(x, y, a1, …, an));
• For each data in the data set (for each pixel in the image), initialize Y=Xi;
• Calculate the mean shift using equation 3-7. The kernel is a uniform kernel
(equation 3-10). Update Y=Y+m(x). Repeat until m(x) equals 0;
• Output the result Zi=(Xi(x, y), Y(a1, …, an)) . This assigns the spatial
information of the initial position and the attribute information of the
convergent position.
91

Figure 3.11. The feature space before applying the mean-shift filtering
Figure 3.12. Feature space after the mean-shift filtering is applied
92
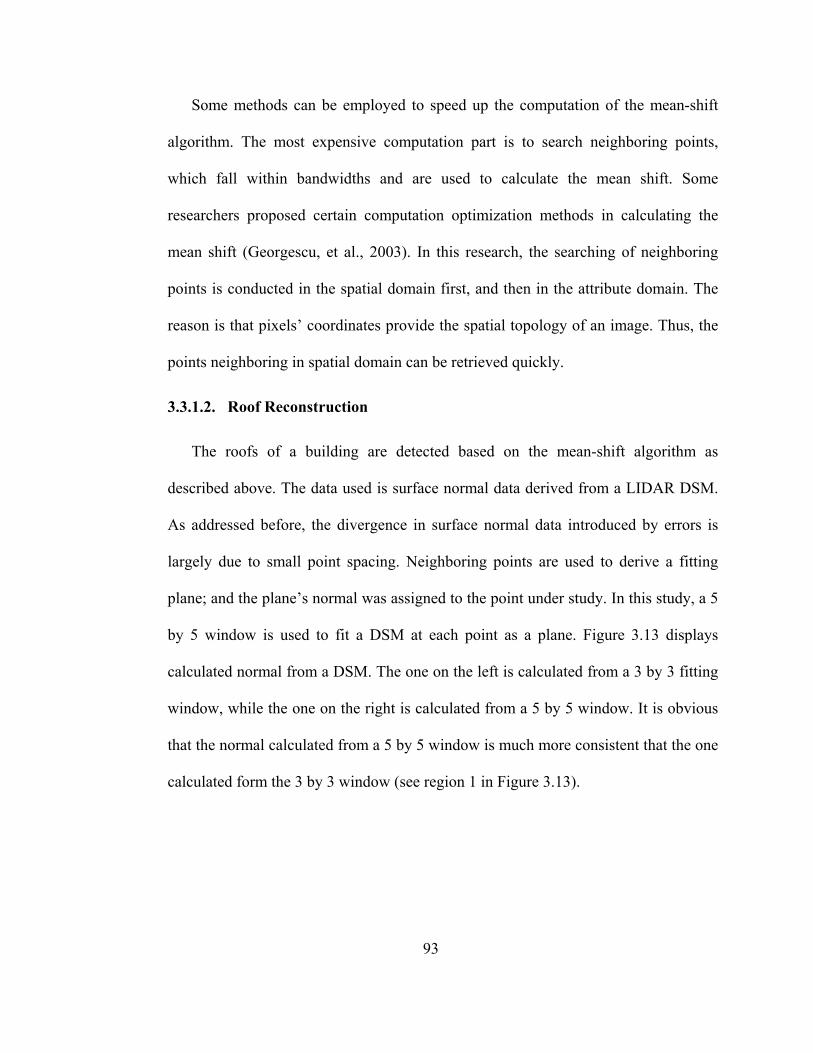
Some methods can be employed to speed up the computation of the mean-shift
algorithm. The most expensive computation part is to search neighboring points,
which fall within bandwidths and are used to calculate the mean shift. Some
researchers proposed certain computation optimization methods in calculating the
mean shift (Georgescu, et al., 2003). In this research, the searching of neighboring
points is conducted in the spatial domain first, and then in the attribute domain. The
reason is that pixels’ coordinates provide the spatial topology of an image. Thus, the
points neighboring in spatial domain can be retrieved quickly.
3.3.1.2. Roof Reconstruction
The roofs of a building are detected based on the mean-shift algorithm as
described above. The data used is surface normal data derived from a LIDAR DSM.
As addressed before, the divergence in surface normal data introduced by errors is
largely due to small point spacing. Neighboring points are used to derive a fitting
plane; and the plane’s normal was assigned to the point under study. In this study, a 5
by 5 window is used to fit a DSM at each point as a plane. Figure 3.13 displays
calculated normal from a DSM. The one on the left is calculated from a 3 by 3 fitting
window, while the one on the right is calculated from a 5 by 5 window. It is obvious
that the normal calculated from a 5 by 5 window is much more consistent that the one
calculated form the 3 by 3 window (see region 1 in Figure 3.13).
93

11
Figure 3.13. Normals calculated from the DSM using different fitting windows: a 3 by 3 window (left) and a 5 by 5 window (right)
The calculated normal is clustered using the mean-shift algorithm. The normal is
filtered first by assigning the value of a density mode to pixels that converge to it.
One mode indicates one cluster in the data. All data points belonging to the same
mode are classified into one cluster. In actual implementation, points belonging to
the same mode do not have the exactly same value due to the round up in conversion
from float/double format data to integer format data. Thus, after filtering, all points
with a difference smaller than the bandwidths employed in the filtering process are
grouped together as one cluster and are labeled. The mean-shift algorithm was carried
out on the joint feature space, (x, y, nx, ny, nz). The (x, y) components are spatial
coordinates; the (nx, ny, nz) components are used to represent the red, green, and blue
channels. Figure 3.14 shows the normal data before and after the filtering. It can be
seen that the normal is smoothed out. Figure 3.15 illustrates the X component of the
normal before and after the filtering for building A outlined in Figure 3.14.
94

A
Figure 3.14. The normal data before (left) and after
(right) the filtering using the mean-shift method
95

Figure 3.15. 3D visualization of the X normal component before (left) and after (right) the filtering for the building A outlined in Figure 3.14
96

After filtering, the data can be classified into clusters by grouping similar points.
In this study, a supervised classification was performed on the normal data through a
commercial software. Small segments were merged to their adjacent large segments,
which share the longest boundary with them. This merge was achieved in vector
format. The segmented image was converted into Arc coverage using ERDAS
Imagine software. Polygons with a small area were then identified and merged to
their neighboring segments. The elimination of small polygons was conducted in
ArcGIS software. Figure 3.16 presents the classification result and roofs converted to
vector format. In a building reconstruction system, roofs can be extracted using the
detected building boundaries as described in the previous chapter.
Figure 3.16. Roof clustering and extraction
After the roofs of a building were extracted, their plane parameters can be
calculated from 3D LIDAR points. The boundary of a roof was used to extract
LIDAR points falling within its footprint using a point-in-polygon algorithm. The
algorithm applied here is the well-known Ray-Crossing method. Figure 3.17
97

illustrates its concept. The algorithm can be summarized as the following: 1) Given a
point and a polygon, a half horizontal line is draw from the point to the positive x-
axis direction; 2) This line is analyzed with the polygon’s boundary segments. The
number of segments that intersect with the half horizontal line is counted; 3) If the
number is an even number, then the point under analysis is outside the polygon; if the
intersection number is an odd number, that means the point under test is inside the
polygon. Points within a roof boundary are retrieved to calculate the roof’s plane
parameters using the Gauss-Markov model. The 3D plane is represented as
; and the parameters to be calculated are a, b, and c. 1** =++∗ zcYbXa
Figure 3.17. Point-in-polygon analysis
Due to roof detection and extraction biases, some points not belonging to a roof
could be extracted by the roof’s boundary. In order to improve the accuracy of a
derived roof plane, the plane fitting error δ , MSE (Mean Square Error), was
calculated; and those points with a residual larger than δ2 were detected and
rejected. Those remaining points were used to calculate a new set of parameters for a
roof plane. This refinement process can be repeated until no larger number of rejected
98

points can be detected. Usually, the repetition number is not large. In this research,
the refinement was performed twice.
3.3.2. Model Reconstruction
To reconstruct a 3D building model, the topology (the adjacency relationship) of its
roofs and vertical walls need to be built after 3D roof surfaces were calculated. This
produces an adjacency graph depicting the inter-relationship of those 3D surfaces. With
the adjacency graph, adjacent planes can be used to derive building corners.
Consequently, a 3D building model can be reconstructed.
The topology among those detected roofs can be derived immediately by checking if
they share a common boundary line segment. This can be done after roof polygons were
extracted or converted from a raster thematic image. To build an adjacency graph, some
researchers performed the raster Voronoi algorithm using the Chamfer mask (Ameri and
Fritsch, 2000). In their study, the detected roof planes are not complete. Roofs do not
touch each other due to the data and algorithm they employed. In this study, the detected
roof planes are complete. They share common boundaries. The topology of these detected
roofs was retrieved using a commercial software package, the ArcGIS software. After a
raster thematic image was generated, it was converted into Arc Polygon Coverage. The
topology was read out through an ArcView script. Obviously, the topology was built in a
2D space.
Vertical walls are represented as line segments in a 2D horizontal space, which forms
the boundary of a building. During roof detection, a roof’s bounding regions were lost
due to a large plane-fitting window. Thus, a building’s boundary (vertical walls) is
99

separated from its roof boundaries. Their adjacency cannot be constructed by directly
checking if they share common line segments. A new method is proposed in this study to
construct the topology between a building’s boundary (vertical walls) and its roofs.
The disconnection between a building’s boundary and its roof boundaries is mainly
caused by the plane fitting in normal calculation. Thus, the general distance of such a
disconnection is proportional to the size of a fitting window. If the building boundary is
shrunk or the roof boundaries are expanded, the building’s boundary will intersect or
touch its roof boundaries. In this research, a building’s boundary will be shrunk to
determine which roof polygon it is adjacent to. See Figure 3.18. A building boundary line
segment is expanded to its perpendicular direction to form a rectangle. If the rectangle
touches or intersects a boundary segment of a roof, the boundary is adjacent to the roof.
The width of such a rectangle is determined by the plane-fitting window size. It can be
double the size of the fitting window. In reality, the width can be controlled as a
parameter input by users. If the rectangle intersects or touches one roof polygon, the
adjacency is built between these two surfaces (the vertical wall and the roof).
2l
B
A
Figure 3.18. Topology of roofs and the building boundary
100

Based on the method described above, the topology of a building can be constructed.
Supposing the roofs (1-4) and the vertical walls (5-12) are numbered as shown in Figure
3.19, the topology can be represented in an adjacency graph or a correlation table, which
is represented as an adjacency matrix. Table 3.1 shows the adjacency matrix for the
building example in Figure 3.19.
1211
10
98
7
6
5
3 4
2
1
Figure 3.19. Numbering roofs and vertical walls
Table 3.1: Adjacency matrix for roofs and vertical walls
1111211111
1111101119
111811117
111611115
1111411113
1111111211111
121110987654321
101
Table 3.1 demonstrates an adjacency matrix. One entry of the matrix indicates the
relationship between two surfaces. The value of 1 indicates that the two surfaces are
adjacent to each other, while the value of 0 indicates that these two surfaces are not
connected. The matrix is symmetric. The diagonal elements are set to 0. Thus, adjacent
surfaces to a surface under study can be immediately retrieved by checking the row or
column entry values.
Each surface has an attribute indicating whether it is a roof surface or a bounding
vertical wall in an actual implementation. The bounding vertical walls of a building are
numbered in sequence. In this manner, the adjacency relationship among vertical walls
can be constructed from their numbers. Each vertical wall can only be adjacent to another
two vertical walls.
To reconstruct a 3D building model, building corners will be reconstructed first
because they are the primitives of a CAD model. In this research, a building’s corners are
divided into two groups; and they will be calculated using different approaches. The first
group is the corners formed by two vertical walls; the second group is formed by at least
two roof surfaces. This division is not an exclusive division. That means there is an
overlap between these two groups. After these two groups of corners were calculated
independently, all corners will be checked to eliminate any duplication. The method for
reconstructing corners formed by two vertical walls is described as followings:
1. Given two adjacent vertical walls a and b, retrieve their common adjacent roof
surface from the surface adjacency matrix. If they have common roof
surfaces, the common roof surfaces will generate a corner with these two
102

vertical walls. For example, in Figure 3.19, vertical walls 5 and 12 will find
the common roof 2. Record the belonging-to relationship between the
calculated corner and its calculating surfaces in a point-surface matrix;
2. If no common roof surfaces were found (see vertical walls 11 and 12 in
Figure 3.19), all roofs adjacent to either a or b are retrieved. If exactly two
roofs were retrieved, these four surfaces will be used to generate one corner
(see vertical walls 11, 12 and roofs 2, 3). Record the belonging-to relationship
between the calculated corner and its calculating surfaces in a point-surface
matrix;
3. If more than two roofs were found adjacent to a or to b, each of the retrieved
roofs generates a corner with these two vertical walls. The actual corner will
have at least two duplications among those corners. These duplications of the
actual corner will be close to each other while other corners will be far away
from the duplications. In this study, a threshold of 1 meter in distance was
used to test if two calculated corners are close to each other. If their distance is
smaller than the threshold, they will be taken as duplications of the actual
corner. The average of these two calculated corners will be taken as the actual
corner. Record the belonging-to relationship between the calculated corner
and its calculating surfaces in a point-surface matrix;
4. Repeat above calculations for all consecutive vertical walls.
The building corners in the second group are formed by at least two roof surfaces.
Similarly, the belonging-to relationship between the calculated corner and its calculating
103

surfaces is also recorded in the point-surface matrix when a corner is constructed. The
method can be summarized as:
1. Given a roof surface S, find out all its adjacent roof surfaces {S1, …, Sn};
2. For each T in {S1, …, Sn}, find out all the surfaces adjacent to both T and S
including roofs and vertical walls {T1, …, Tm}. For example, in Figure 3.19,
vertical walls 5 and 7 are adjacent to both roofs 1 and 2. They will be
retrieved as the set {T1, T2};
3. If {T1, …, Tm} is empty, go to step 5. Otherwise, for each I in {T1, …, Tm}, a
corner is calculated from {I, S, T}. Record the belonging-to relationship in the
point-surface matrix;
4. After all roofs S are processed using the steps from 1 to 3, corners in the
second group are compared. If two corners share at least three common roofs,
they are merged together. The point-surface matrix will be changed
accordingly. The reason to perform this operation is that the process is
redundant. For example, starting from roof 1 in Figure 3.19, roof 2 will be
retrieved and a corner will be generated with vertical wall 5. When starting
from roof 2, roof 1 will be retrieved to form a new corner with vertical wall 5.
In reality, these two corners are the same actual corner;
5. Repeat the process for each roof surface.
104

After all corners in the first group and the second group were generated, they are all
compared to check corner redundancy. If two corners are shorter than a threshold of 1
meter, they will be merged into one corner. The point-surface matrix will be changed
accordingly. Figure 3.20 shows an example of reconstructed building corners. The
Roman numerals represent corner number while the Arabic numerals represent surface
number. Correspondingly, Table 3.2 shows its point-surface matrix. The example matrix
has equal row and column numbers.
6
4
3 1 2 5
IIIIII
VI V IV
Figure 3.20. Reconstructed building corners
Table 3.2. Point-surface matrix for the example in Figure 3.20
I
1116115
1114113
1111211111
VIVIVIIIII
105

Up to this point, 3D corners of a building are constructed. A 3D building model can
be reconstructed through its 3D surfaces. A surface can be described by its bounding
corners, which are retrieved from the point-surface matrix. However, these bounding
points are not ordered to their sequence on surface boundary. A convex hull can be
calculated from corners as a surface for a convex roof polygon. But it does not work for a
concave polygon. For a vertical wall, the lower points can be derived by intersecting the
ground DTM. Before the lower points are derived, the upper points that are retrieved
from a point-surface matrix are ordered first. By doing so, points can be ordered in
consistency with the boundary. The method to order points on vertical walls can be
summarized as:
1. Giving a vertical wall surface, retrieve all its upper points from the point-
surface matrix, P{p1, …, pn}. These points are the upper points;
2. If n equals 2, take the order P {p1, p2}. Go to step 5;
3. If n is larger than 2, the horizontal coordinates will be used to order these
points. These points are projected to a horizontal plane and a 2D line is
formed. This line can be derived from the first two points, (x1, y1) and (x2, y2).
The line can be represented in the form shown in equation 3-11. Each point on
the line can be represented by a unique value t;
∆+=∆+=
ytyyxtxx
**
1
1 where
−=∆−=∆
12
12
yyyxxx
),( +∞−∞∈t (3-11)
4. Calculate t for every point and order the points based on t. This order applies
to the 3D points, P′{p1′, …, pn′};
106
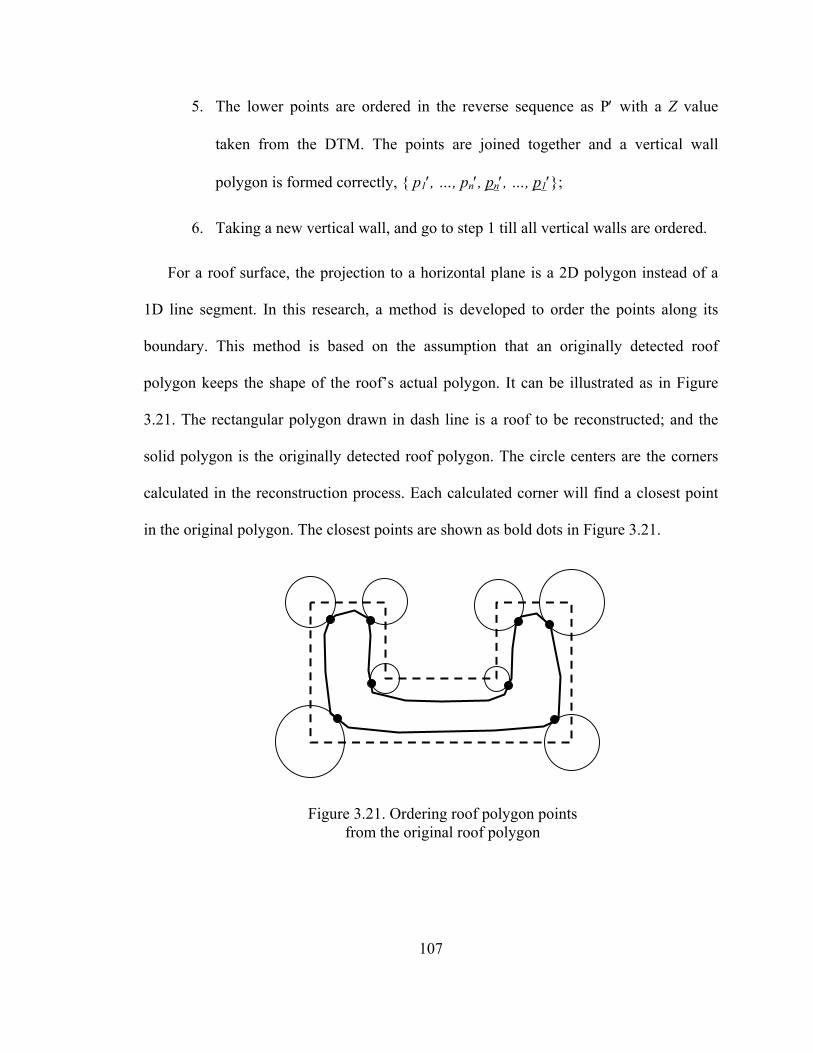
5. The lower points are ordered in the reverse sequence as P′ with a Z value
taken from the DTM. The points are joined together and a vertical wall
polygon is formed correctly, { p1′, …, pn′, pn′, …, p1′};
6. Taking a new vertical wall, and go to step 1 till all vertical walls are ordered.
For a roof surface, the projection to a horizontal plane is a 2D polygon instead of a
1D line segment. In this research, a method is developed to order the points along its
boundary. This method is based on the assumption that an originally detected roof
polygon keeps the shape of the roof’s actual polygon. It can be illustrated as in Figure
3.21. The rectangular polygon drawn in dash line is a roof to be reconstructed; and the
solid polygon is the originally detected roof polygon. The circle centers are the corners
calculated in the reconstruction process. Each calculated corner will find a closest point
in the original polygon. The closest points are shown as bold dots in Figure 3.21.
Figure 3.21. Ordering roof polygon points
from the original roof polygon
107
The method for ordering a roof polygon requires its original roof polygon detected
from normal data, which has its points ordered in the correct sequence. The method can
be described as followings:
1. Giving a roof polygon, retrieve all its points from the point-surface matrix,
P{p1, …, pn};
2. Retrieve the original roof polygon detected from normal data, which is
represented as a sequence of points in order. Number its points based on their
orders in the sequence, P′{p1′, …, pm′};
3. For each corner point pi in P, find the closest point pj′ in P′. Assign the
number j to the point pi as an attribute;
4. Order the corner points in P according to their attribute number js. This order
is the sequence for these calculated corners along a roof boundary. Thus, a
roof polygon is reconstructed.
Figure 3.22 presents an example of topology construction between vertical walls and
roof surfaces. The red segments are expanded segments parallel to vertical walls, which
are represented as blue segments. The green polygons are roof boundaries. After the
topology was built, coordinates of building corners were calculated and plotted as star
marks in Figure 3.22. The reconstructed 3D model of the same building from Figure 3.22
is shown in Figure 3.23.
108

109
Figure 3.22. The reconstruction of surface topology
Figure 3.23. An example of reconstructed 3D building models

CHAPTER 4
BUILDING MODEL REFINEMENT
LIDAR point data are random points with high vertical accuracy; however, these
points have lower horizontal accuracy mainly caused by large laser footprints on the
ground and navigation errors. LIDAR points are sample points of the earth’s surface.
This determines that LIDAR data cannot capture sharp linear features. Thus, a building
model reconstructed from LIDAR will have low geometrical accuracy, especially the
bounding boundary. This means that there is a great potential to improve a building’s
geometry, specifically its boundary, through data or information integration. A linear
feature derived from intersection of two roof surfaces will have a high accuracy because
the roofs derived from LIDAR points have high accuracy. Instead of being refined, these
features can be used as control features in data registration.
In this research, aerial photographs are employed to integrate with LIDAR data for
building model refinement. Aerial photographs are mainly used to extract linear features,
specifically building boundary edges. A method will be developed to integrate these
edges with reconstructed building models from LIDAR data to improve the accuracy of
the models. The method for data registration will be described first; then data integration
110

will be illustrated, followed by a description of building model refinement. Figure 4.1
shows the flowchart of the refinement process.
No
Keep the original linesKeep the updated lines
Yes
Both 2D lines are updated
NoNo
Yes
Calculate new line parameters
Found edge pixels for refinement
Yes
Calculate new line parameters
Found edge pixels for refinement
Edge pixel search for refinement
Edge pixel search for refinement
Edge detection Edge detection
2D polygon in image 2 2D polygon in image 1
Projection
3D building roof polygon
Figure 4.1. Simultaneously updating 2D lines in both stereo images
111
4.1. Co-Registration of LIDAR and Image Data
Integration of data from different sensors or platforms can be performed in different
levels: data level, feature level, and object level [Csathó, 1999]. In order to perform
integration, data from different sources should be registered under the same framework, a
common coordinate system. In order to integrate aerial photograph and LIDAR data for
refinement, these two data sets should be co-registered within one coordinate system.
Some research studies have been conducted to use linear features in image resection.
Habib (2002) used 2D ground linear features to estimate photograph exterior orientation
parameters (EOP) using a Modified Iterated Hough Transform methodology. Stamos
(2000) registered 3D and 2D linear features derived from LIDAR data and image data
respectively with known image EOP. Straight line-segments perform as control features
to derive EOP. Figure 4.2 shows the general procedure for co-registration of LIDAR data
and aerial photographs.
LIDAR data points are already in a 3D coordinate system. So it is convenient to take
the coordinate system of the LIDAR data as the common framework. Thus, a aerial
photograph will be registered to the LIDAR data system. The registration is the
calculation of interior and exterior orientation parameters for an aerial image. The interior
orientation is a transformation from a measuring system to the image system originated at
its calibrated principle point. The exterior orientation is to derive the EOP, which are the
position of the exposure center (X0, Y0, Z0) and camera pose (ω, φ, κ). The EOP of an
aerial photograph can be calculated from image resection using ground control points like
GPS control points or points from other sources with high accuracy.
112

Interior Orientation
ExteriorOrientationParameters
Least-Square to solve unknowns
Coplanarity Conditions
Conjugate LineSegmentsMatching
2D LineSegments
2D EdgeExtraction
Aerial Photo
3D LineSegments
AdjacentPlanar Surface
SurfaceIntersection
Planar surfacedetection
LIDAR Data
Figure 4.2. Co-registration of LIDAR and aerial images
For data integration, internal consistence of integrated data is very important. To have
a high consistence, it is a wise choice to select points or features from LIDAR data as
known control features for image resection. As mentioned before, LIDAR data cannot
capture either sharp linear or point features directly. Consequently, control features
113
cannot be measured directly from LIDAR data. However, accurate linear features can be
calculated from LIDAR data. Planar roofs have high accuracy parameters because a large
amount of points were applied to derive their parameters. Linear features derived from
intersection of adjacent planar roofs can be employed as control features. Compared with
linear features, corners formed by three intersecting roofs are less common in a LIDAR
data set. So linear features derived from roof intersection will be utilized to perform
image resection. After image resection, two data sets are registered in a common
coordinate system.
4.1.1. 3D Intersection Lines from LIDAR data and 2D Edges from Photograph
To perform image resection, conjugate line segments should be measured in 3D space
of LIDAR data and 2D space of aerial photographs. 3D line segments from LIDAR data
are calculated from adjacent intersecting planar roofs. This requires that 3D planar roofs
be calculated first.
To calculate 3D roof plane parameters for image resection, points belonging to a
plane are distinguished and extracted. After the points of a plane were extracted, the
plane’s parameters can be calculated using the least square regression method. A 3D line
is obtained by intersecting two adjacent 3D planes; and it will be represented using two
points on the line.
From a 2D image, the conjugate line segment of a 3D line segment in the 3D ground
space is interpreted manually, and its end points are measured. After applying the image
interior orientation transformation, the 2D edge will be ready for image resection
described in the following section.
114
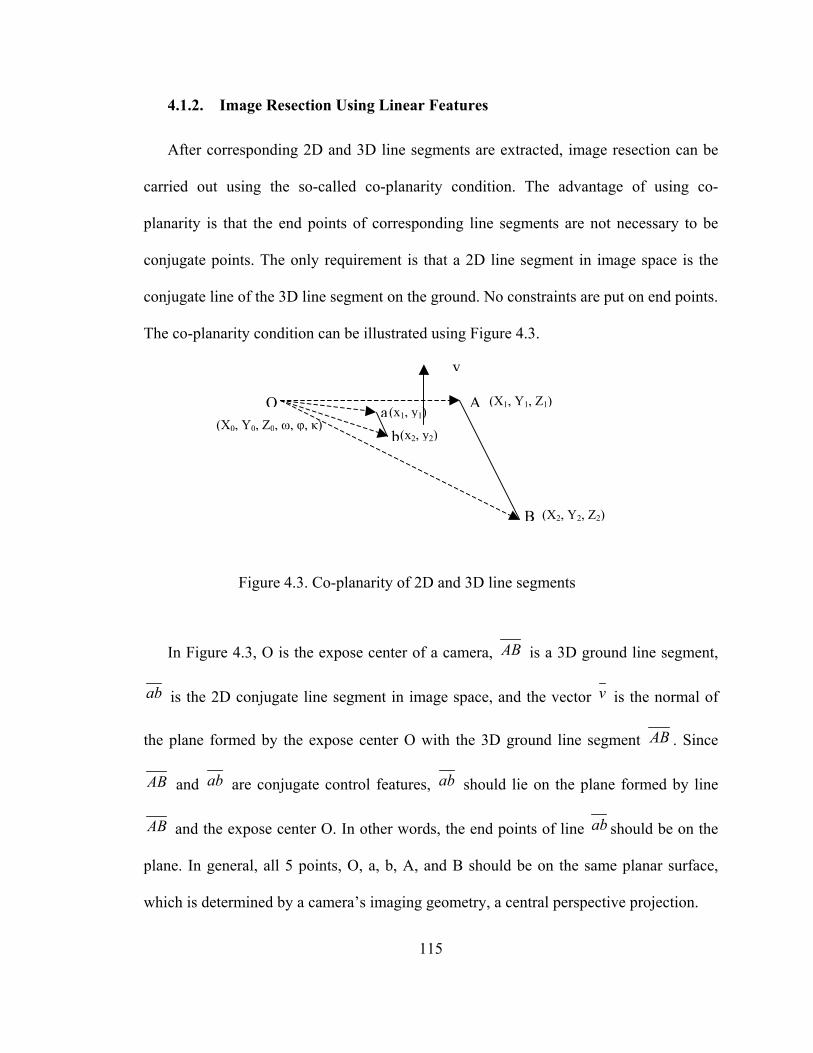
4.1.2. Image Resection Using Linear Features
After corresponding 2D and 3D line segments are extracted, image resection can be
carried out using the so-called co-planarity condition. The advantage of using co-
planarity is that the end points of corresponding line segments are not necessary to be
conjugate points. The only requirement is that a 2D line segment in image space is the
conjugate line of the 3D line segment on the ground. No constraints are put on end points.
The co-planarity condition can be illustrated using Figure 4.3.
v
(x2, y2)
(x1, y1)(X1, Y1, Z1)
(X0, Y0, Z0, ω, φ, κ) b
a
B
AO
(X2, Y2, Z2)
Figure 4.3. Co-planarity of 2D and 3D line segments
In Figure 4.3, O is the expose center of a camera, AB is a 3D ground line segment,
ab is the 2D conjugate line segment in image space, and the vector v is the normal of
the plane formed by the expose center O with the 3D ground line segment AB . Since
AB and ab are conjugate control features, ab should lie on the plane formed by line
AB and the expose center O. In other words, the end points of line ab should be on the
plane. In general, all 5 points, O, a, b, A, and B should be on the same planar surface,
which is determined by a camera’s imaging geometry, a central perspective projection.
115

In order to represent and to use co-planarity conditions in deriving EOP, two vectors
are drawn from the expose center O to points a and b respectively. Thus, the co-planarity
condition of the 5 points is equivalent to the condition that both vectors, Oa and Ob , are
perpendicular to the normal vector v . This guarantees that the line ab lies on the
common plane formed by O, A, and B. Vector v is also perpendicular to vectors OA and
OB . This condition can be written as equation 4-1.
×==•=•
ObOavOBvOAv
00
(4-1)
Each pair of control feature provides two equations, 0=• vOA and 0=• vOB .
Thus, for 6 unknowns of EOP, three pairs of linear control features can solve the
problem. For better accuracy, more than three pairs of control features are needed for
redundant checks. Then, the least-square method is used to minimize the discrepancy
among the conditions.
In order to use the co-planarity condition, all coordinates should be within one
common coordinate system. Here, the 3D coordinate system of the image space is used,
which is originated at the expose center O. Thus, a translation and a rotation will be
performed to transform ground coordinates into the image space system.
Suppose the rotation matrix from ground space to image space is R, the coordinates
of expose center O in the ground space is (X0, Y0, Z0), the coordinates of the end points
of a 2D line segment after interior orientation are (x1, y1) and (x2, y2) respectively, the
116

points’ coordinates of the conjugate 3D line segment in the ground space are (X1, Y1,
Z1) and (X2, Y2, Z2) respectively, and the calibrated camera lens focal length is f, the
co-planarity condition equations can be re-written for EOP calculation.
−+−−−+
=
=
ϕωϕωϕκϕωκωκϕωκωκϕκϕωκωκϕωκωκϕ
cos.coscos.sinsinsin.sin.coscos.sinsin.sin.sincos.cossin.coscos.sin.cossin.sinsin.sin.sinsin.coscos.cos
333231
232221
131211
rrrrrrrrr
R
(4-2)
−=
fyx
Oa 1
1
−=
fyx
Ob 2
2
(4-3)
−+−+−−+−+−−+−+−
=
−−−
=).().().().().().().().().(
.
013301320131
012301220121
011301120111
01
01
01
ZZrYYrXXrZZrYYrXXrZZrYYrXXr
ZZYYXX
ROA (4-4)
−+−+−−+−+−−+−+−
=
−−−
=).().().().().().().().().(
.
0233021320231
022302220221
021302120211
02
02
02
ZZrYYrXXrZZrYYrXXrZZrYYrXXr
ZZYYXX
ROB (4-5)
−−−
=
=×=
1221
21
12
..).().(
yxyxxxfyyf
cba
ObOav (4-6)
117

Thus, the co-planarity conditions can be written as
0)).().().(.()).().().(.(
)).().().(.(
013301320131
012301220121
0113011201111
=−+−+−+−+−+−+
−+−+−=•=
ZZrYYrXXrcZZrYYrXXrb
ZZrYYrXXravOAF
(4-7)
0)).().().(.()).().().(.(
)).().().(.(
023302320231
022302220221
0213021202112
=−+−+−+−+−+−+
−+−+−=•=
ZZrYYrXXrcZZrYYrXXrb
ZZrYYrXXravOBF
(4-8)
The six unknown exterior orientation parameters of a camera are included in
equations 4-7 and 4-8. These two equations can be used to solve the unknowns. However,
the equations are non-linear equations. So linear forms are derived using the Taylor
series, and an iterative approach is necessary to solve these parameters. The deduction is
presented in the following sections.
Suppose the variable in form of a vector is u , then
[ ]κϕω000 ZYXu T=
0).(!1
)()(
...).(!
)(...).(
!1)(
)()(
00
0
00
)(
00
0
≈−′
+≈
+−++−′
+=
uuuF
uF
uun
uFuu
uFuFuF n
n
(4-9)
118
In equation 4-9, function )(uF is written in Taylor series/expansion. The items of
order higher than 1 are omitted because they have small values. They will be treated as
errors. Now non-linear function )(uF is approximated using a linear function. The
Gauss-Markov model can be employed to perform the least-square adjustment to
calculate the parameters from the linear function. Knowing the initial value 0u , the value
of u can be obtained through a standard iterative approach. The value of u is the
unknown EOP to be calculated from image resection. The relation is 00 uuu ∂+= . 0u∂ is
correction to 0u at every iteration. The equation 4-9 can be written in the form
eFFFZZFY
YFX
XFuF +∆
∂∂
+∆∂∂
+∆∂∂
+∆∂∂
+∆∂∂
+∆∂∂
=− κκ
ϕϕ
ωω
......)( 00
00
00
0 (4-10)
To solve the problem, at least 6 independent equations are needed from equation 4-
10. That means at least 3 pairs of conjugate line segments should be measured because
each conjugate line pair contributes two equations. In practice, more than 6 equations are
required to obtain a high accuracy and a robust estimation. The Gauss-Markov model is
used to derive the solution.
1
1
1
111
***)**(ˆ
*
×××
−
××××
××××
=
+=
nnnnm
T
mnnnnm
T
m
nmmnn
YPAAPA
eAY
ξ
ξ (4-11)
Here,
119

∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
⋅⋅⋅⋅⋅⋅∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
∂∂∂∂∂∂=
−−=
κϕω
κϕω
κϕωξ
nnnnnn
T
Tn
FFFZF
YF
XF
FFFZF
YF
XF
A
ZYX
uFuFY
000
111
0
1
0
1
0
1
000
010
],,,,,[
])(,...,)([
(4-12)
The coefficients of A can be calculated as in equation 4-13. In equation 4-13,
constants (a, b, c) are the coordinates of vector v . See equation 4-6. The Gauss-Markov
Model can be used to calculate the increments or the corrections
( κϕω ∂∂∂∂∂∂ ,,,,, 000 ZYX ). Then a camera’s EOP can be updated from its initial values.
After several iterations, the EOP can be calculated with required accuracy requirements.
The procedure can be summarized as following steps:
• Knowing the initial values of EOP 0u , matrix A and vector Y are calculated
using equations 4-12 and 4-13;
• Using the Gauss-Markov model to calculate the parameter increments
0u∂ (equation 4-11), and update 0u with 0u∂ by adding 0u∂ to 0u . The
weight matrix is determined by actual measurement accuracy. To simplify the
calculation, matrix P can be assigned as an identity matrix. This means
measurements are equally weighted;
• Check the increments 0u∂ , if 0u∂ is smaller than a pre-defined value, then
stops and 0u is the calculated EOP. Otherwise, go to step 1 and continue.
120
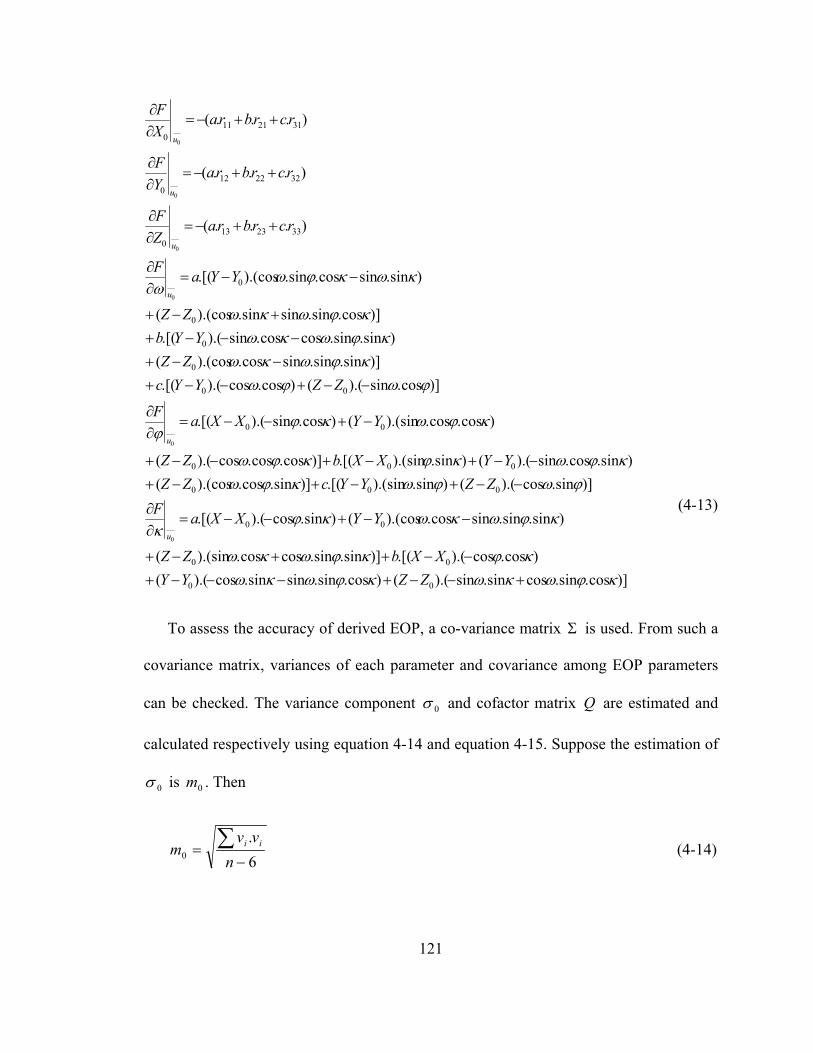
)]cos.sin.cossin.sin).(()cos.sin.sinsin.cos).(()cos.cos).(.[()]sin.sin.coscos.).(sin(
)sin.sin.sincos.).(cos()sin.cos).(.[(
)]sin.cos).(()sin.).(sin.[()]sin.cos.).(cos()sin.cos.sin).(()sin.).(sin.[()]cos.cos.cos).((
)cos.cos.).(sin()cos.sin).(.[(
)]cos.sin).(()cos.cos).(.[()]sin.sin.sincos.).(cos(
)sin.sin.coscos.sin).(.[()]cos.sin.sinsin.).(cos(
)sin.sincos.sin.).(cos.[(
)...(
)...(
)...(
00
00
00
000
000
00
00
0
0
0
0
3323130
3222120
3121110
0
0
0
0
0
0
κϕωκωκϕωκωκϕκϕωκω
κϕωκωκϕκ
ϕωϕωκϕωκϕωκϕκϕω
κϕωκϕϕ
ϕωϕωκϕωκω
κϕωκωκϕωκω
κωκϕωω
+−−+−−−+−−++−+
−−+−−=∂∂
−−+−+−+−−+−+−−+
−+−−=∂∂
−−+−−+−−+
−−−++−+
−−=∂∂
++−=∂∂
++−=∂∂
++−=∂∂
ZZYYXXbZZ
YYXXaFZZYYcZZ
YYXXbZZ
YYXXaF
ZZYYcZZ
YYbZZ
YYaF
rcrbraZF
rcrbraYF
rcrbraXF
u
u
u
u
u
u
(4-13)
To assess the accuracy of derived EOP, a co-variance matrix Σ is used. From such a
covariance matrix, variances of each parameter and covariance among EOP parameters
can be checked. The variance component 0σ and cofactor matrix Q are estimated and
calculated respectively using equation 4-14 and equation 4-15. Suppose the estimation of
0σ is m . Then 0
6.
0 −= ∑
nvv
m ii (4-14)
121
In equation 4-14, n is the number of equations/observations used for deriving the
EOP, is the discrepancy of the objective function iv )(uF . Here, ii uFv )(−= . The
cofactor matrix
1)**( −= APAQ T (4-15)
Then, the covariance matrix of the derived exterior orientation parameters is
Qm .20=Σ (4-16)
4.2. Line Refinement in 2D Image Space
Only a few researchers have reported their work conducted on integration of LIDAR
and imagery data for building reconstruction. Ameri and Fritsch (2000) presented their
work on building reconstruction from planar-roof structure. They detected building seed
regions from a LIDAR DSM based on surface mean curvatures. The seed regions were
then projected to images to perform image segmentation using a region-growing
algorithm. The detected roof regions from images were then projected to the LIDAR
DSM to calculate 3D parameters using LIDAR points. After a 3D building model was
constructed, it was projected to the images again for refinement. Image gradient was
employed as a clue for searching edge pixels belonging to a building line segment. Seo
(2003) used contours generated from LIDAR data to detect buildings and he
reconstructed building models from the LIDAR data after buildings were detected.
Reconstructed models were then projected to images for refinement. He detected image
edges and selected edges with a certain length to refine building models.
122

The direct information provided by images is in 2D image space. In order to improve
its geometry, a 3D building model will be projected to the image space in this study.
Then the projected model will be refined using extracted image information.
Consequently, the 3D model is refined. With known EOP, a 3D building model can be
projected to an image. Figure 4.4 shows an example of projected building roofs on a pair
of stereo aerial photographs. It is clear that there are discrepancies between the projected
model lines and their corresponding image lines. It should be noted that the discrepancies
at the upper right corners are caused by model assumption. In this research, building
models are assumed to have rectangular shapes. The refinement of model topology is not
the content of this study.
Figure 4.4. A building model from LIDAR data projected onto a pair of stereo images
The advantage of aerial photographs over LIDAR data is that they can capture sharp
linear features, i.e., edges. In order to use linear features to perform refinement, these
123

edges should be detected and extracted first. The Canny edge detector is employed to
detect edge pixels from aerial photograph data. Figure 4.5 presents an example of
detected edge pixels from a sub image covering a projected building model. The edge
detection was conducted on the red band of a color image.
Figure 4.5. Building image and the edge pixels detected from the Canny detector
In reality, a building under study is not the only foreground object in a study area.
There are also many other objects like cars and other constructions. Some of these objects
adjacent to a building have similar spectral characteristics to buildings. In this case, an
edge detector will be confused and will fail to detect edge pixels of the building under
study. Some of the unwanted objects have very different spectral characteristics. In this
case, they will introduce unwanted edge pixels. This can be seen from Figure 4.5. In
order to use the right edge pixels to refine a projected 2D building model, pixels
belonging to the building should be correctly separated from other edge pixels.
124

Although LIDAR data cannot capture sharp features, reconstructed building models
are still good approximations of actual buildings. Thus, a projected 2D building model is
close to the image of a real model; and provides valuable clues for further processing. To
pick the correct pixels of a building edge, a projected model provides two important
clues, orientation and position. An edge line of a projected model is parallel or almost
parallel to its corresponding image line. In addition, a pixel on a line has a gradient
azimuth perpendicular to the line it belongs to. The gradients of image pixels were
computed; and gradient azimuths were also calculated. Only those detected edge pixels
with a gradient azimuth perpendicular to a projected model line will be extracted for
further investigation. Here, the “perpendicular” is not exactly a 90-degree difference.
Instead, it is a confidential range. For example, a 5-degree deviation from 90-degree can
be treated as “perpendicular.”
Besides the azimuth, the position of a projected model line provides a second clue for
edge pixel searching. A reconstructed building model is a good approximation of a real
building. A projected 2D model on an image should be close to the actual image model.
To use this information, a buffer can be drawn to eliminate unwanted edge pixels far
away from a model line. The width of the buffer matches how well a model from LIDAR
data approximates its real building model.
In this study, the buffer sizes of the azimuth search and distance search are
determined by trying. In future research, they could be determined automatically. For
example, LIDAR data accuracy, image EOP accuracy, and comparison of building
boundaries before and after the regularization will provide some information for
125

calculating a buffer’s size. Figure 4.6 shows the detected edge pixels belonging to their
corresponding line of a projected model edge line.
Figure 4.6. Edge pixels detected from the azimuth constraint (left) and from both the azimuth and the position constraints (right)
After edge pixels were correctly detected, they can be used to refine projected model
edges. The refinement will be conducted line by line. In this study, the orthogonal least
square regression method will be employed to derive line parameters. Instead of
minimizing the vertical distance between observations and a fitting line as the traditional
least square method does, the orthogonal regression method minimizes the perpendicular
distance between the observations and a fitting line. For easier implementation, a line in a
2D image space will be represented using polar coordinates. The polar representation of a
line is (d, θ). Here, d is the perpendicular distance from the origin to this line while θ is
126

the normal direction of the line. This line is formed by all points whose projection on the
vector (cos(θ),sin(θ)) has a length of d. Such a line can be represented in equation (4-17).
)sin(*)cos(* θθ yxd += (4-17)
Equation (4-17) can be rewritten as constraint function in equation (4-18).
0)sin(*)cos(*),( =−−= θθ yxdyxF (4-18)
Given a random point (x’, y’), its perpendicular distance to the line is the absolute
value of F(x,y), |F(x’,y’)|. To derive the parameter of the fitting line using the orthogonal
regression, F(x,y) can be rewritten as
0)sin(*)cos(*),( =−−= θθθ yxddF (4-19)
Equation (4-19) has a nonlinear form. Thus, a linear form will be derived based on
the Taylor series. In order to get accurate line parameters, iterative calculations will be
performed.
0*),(*),(),(),( 00'
00'
00 ≈∆+∆+≈ θθθθθ θ dFddFdFdF d (4-20)
edFddFdF d +∆+∆=− θθθθ θ *),(*),(),( 00'
00'
00 (4-21)
Equation (4-20) is the form applied to derive the increments of line parameters. The
Gauss-Markov model will be used to minimize the error e. The projected 2D model lines
provide initial values for distance d and azimuth θ. At each iteration, increments of d and
θ are calculated; then d and θ are updated using the increments. Figure 4.7 shows the
searching for edge pixels and the refined edges using the orthogonal regression method.
127

Figure 4.7. Searching edge pixels (left) and refined edge lines (yellow line in right)
4.3. Reconstruct 3D Building Model with Refined Geometry
Based on imaging geometry, a 3D surface on the ground can be reconstructed through
stereo image processing. After 2D projected building lines were refined using image
information, specifically edge pixels detected from the Canny operator in this study, new
corners can be generated by intersecting the refined lines. In this way, the coordinates of
original corners can be updated from the refined lines. Due to different imaging
geometries, stereo images have different qualities. Some edges can be detected in one
image, but not in the other. In this case, the corners updated independently from each
image of a stereo pair are actually not conjugate points. They are not the same point on
the ground. So they cannot be used to perform space intersection for calculating 3D
ground coordinates.
128
To solve this problem, it is necessary to keep track of the updating of each corner.
Only corners updated from both stereo images from the same refined lines will be
updated. From the description of the previous section, it can be seen that the fundamental
refinement primitives are line segments. To simplify the processing, updating information
of a line segment was kept instead of a corner’s updating information. A boundary line is
updated if and only if it is updated in both stereo image spaces. Otherwise, the line will
remain unchanged. After all lines were processed, new corners were generated through
line intersection. Using this strategy, corners generated from stereo images are conjugate
points; and they can be processed using space intersection to derive 3D coordinates. It
should be noted that some of the new corners are actually not updated. However, it is not
necessary to differentiate updated corners from updated ones.
After the refinement of line segments was finished, coordinates of corners can be
calculated through intersecting adjacent line segments. Based on the line refinement
principle, conjugate corners are updated together in both stereo images. There will be no
case that a corner is updated in one image while its conjugate corner in the other image is
not updated correspondingly. 3D ground coordinates are calculated from conjugate points
using collinearity conditions of a ground point, its image point, and a camera’s exposure
center.
While the collinearity equations are the basic ones applied in space intersection, there
is other information that can be applied to derive a reliable and high accuracy for 3D
ground coordinates. From a 3D model reconstructed from LIDAR data, the relationship
among corners and surfaces is available. Due to high accuracy of LIDAR data in
129
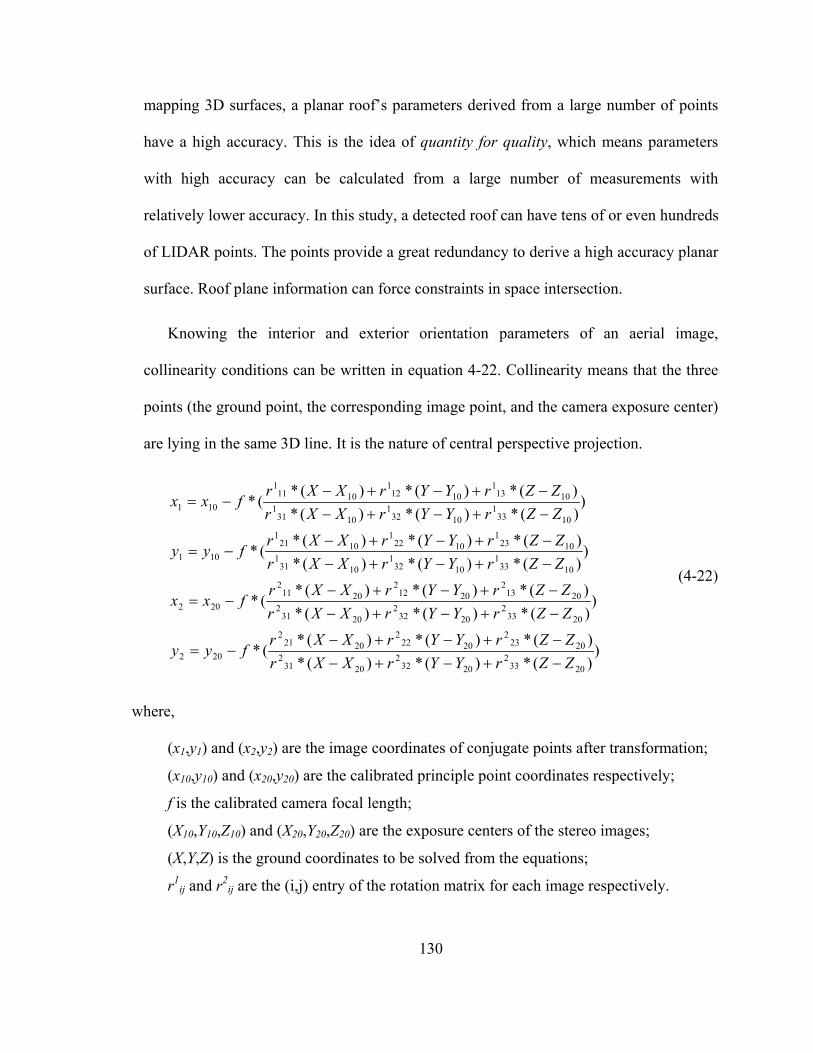
mapping 3D surfaces, a planar roof’s parameters derived from a large number of points
have a high accuracy. This is the idea of quantity for quality, which means parameters
with high accuracy can be calculated from a large number of measurements with
relatively lower accuracy. In this study, a detected roof can have tens of or even hundreds
of LIDAR points. The points provide a great redundancy to derive a high accuracy planar
surface. Roof plane information can force constraints in space intersection.
Knowing the interior and exterior orientation parameters of an aerial image,
collinearity conditions can be written in equation 4-22. Collinearity means that the three
points (the ground point, the corresponding image point, and the camera exposure center)
are lying in the same 3D line. It is the nature of central perspective projection.
))(*)(*)(*)(*)(*)(*
(*
))(*)(*)(*)(*)(*)(*
(*
))(*)(*)(*)(*)(*)(*
(*
))(*)(*)(*)(*)(*)(*
(*
20332
20322
20312
20232
20222
20212
202
20332
20322
20312
20132
20122
20112
202
10331
10321
10311
10231
10221
10211
101
10331
10321
10311
10131
10121
10111
101
ZZrYYrXXrZZrYYrXXr
fyy
ZZrYYrXXrZZrYYrXXr
fxx
ZZrYYrXXrZZrYYrXXr
fyy
ZZrYYrXXrZZrYYrXXr
fxx
−+−+−−+−+−
−=
−+−+−−+−+−
−=
−+−+−−+−+−
−=
−+−+−−+−+−
−=
(4-22)
where,
(x1,y1) and (x2,y2) are the image coordinates of conjugate points after transformation;
(x10,y10) and (x20,y20) are the calibrated principle point coordinates respectively;
f is the calibrated camera focal length;
(X10,Y10,Z10) and (X20,Y20,Z20) are the exposure centers of the stereo images;
(X,Y,Z) is the ground coordinates to be solved from the equations;
r1ij and r2
ij are the (i,j) entry of the rotation matrix for each image respectively.
130

Equation 4-22 can be rewritten in a uniform formula to calculate ground coordinates.
See equation 4-23.
0))(*)(*)(*)(*)(*)(*
(*),,(
0))(*)(*)(*)(*)(*)(*
(*),,(
0))(*)(*)(*)(*)(*)(*
(*),,(
0))(*)(*)(*)(*)(*)(*
(*),,(
20332
20322
20312
20232
20222
20212
2024
20332
20322
20312
20132
20122
20112
2023
10331
10321
10311
10231
10221
10211
1012
10331
10321
10311
10131
10121
10111
1011
=−+−+−−+−+−
+−=
=−+−+−−+−+−
+−=
=−+−+−−+−+−
+−=
=−+−+−−+−+−
+−=
ZZrYYrXXrZZrYYrXXr
fyyZYXF
ZZrYYrXXrZZrYYrXXr
fxxZYXF
ZZrYYrXXrZZrYYrXXr
fyyZYXF
ZZrYYrXXrZZrYYrXXr
fxxZYXF
(4-23)
In order to calculate the unknowns from equation 4-23 in a computer, its linear form
should be used. The linear form can be written as
0***),,(),,( 000 =+∆∂∂
+∆∂∂
+∆∂∂
+= iiii
ii eZZF
YYF
XXF
ZYXFZYXF (4-24)
iiii
i eZZF
YYF
XXF
ZYXF +∆∂∂
+∆∂∂
+∆∂∂
=− ***),,( 000 (4-25)
In equations 4-24 and 4-25, ei is the error introduced by omitting items with high
order derivatives. The subscript “i” ranges from 1 to 4 representing the 4 equations in
equation 4-23. Using a vector form, the observation equations can be written as
eAL += ξ* (4-26)
where
−−−−
=
),,(),,(),,(),,(
0004
0003
0002
0001
ZYXFZYXFZYXFZYXF
L , , e ,
∆∆∆
=ZYX
ξ
=
4
3
2
1
eeee
131

and
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
ZF
YF
XF
ZF
YF
XF
ZF
YF
XF
ZF
YF
XF
A
444
333
222
111
The constraint that a ground corner is lying in a roof surface is applied together with
the observation equations to derive ground coordinates for a corner. A corner point can
belong to more than one roof surface. Generally, the constraint from the ith roof surface
can be written as
1*** =++ ZcYbXa iii (4-27)
To be integrated with the observation equations, 4-27 should use the increments
( ) as unknowns. It can be expressed in equation 4-28. ZYX ∆∆∆ ,,
000 ***1*** ZcYbXaZcYbXa iiii −−−=∆+∆+∆ (4-28)
Applying the same form as equation 4-26, equations 4-28 and 4-26 can be written in
combination as the equation 4-29.
WBeAL
=+=
ξξ
**
(4-29)
Applying the least square method together with the Lagrange approach, the unknowns
can be solved as in equations 4-30 and 4-31.
132

=
WLPA
BBAPA TTT **
*0
**λξ
(4-30)
=
−
WLPA
BBAPA TTT **
*0
**1
λξ
(4-31)
where,
P is the weight matrix;
λ is the unknowns introduced by the Lagrange method with a dimension of n by 1,
and n is the number of roof constraints applied to the current corner.
After ground coordinates were calculated for all corners of a building, a building
model was refined. The refined model from integration of LIDAR and imagery data has a
high geometric quality compared with the one reconstructed solely from LIDAR data. In
this study, corners belonging to building roofs were processed. Lower corners of vertical
walls were derived from their corresponding upper corners.
4.4. Implementation
The refinement can be implemented on roofs individually or on a whole building
model simultaneously. To use individual roofs, some 3D corners will be processed on
each roof respectively. Because these corners were processed independently from
different roofs, it is likely that coordinates of a corner calculated from different processes
don’t match each other. This is mainly caused by roof planar constraints applied to the
same corner from different roofs in different processes.
133
To solve the discrepancy problem, the refinement is carried out on a whole building
model simultaneously. The procedure can be described as followings:
1. Initialize a weight vector for corners N={np1,np2,…npm} to zero;
2. Given a roof polygon, retrieve its points and project the 3D polygon to stereo
image spaces;
3. Update each roof segment using the method presented previously. Record the
number of points used to update the line segments, nli. For a non-updated
segment, the number is zero;
4. Intersect the segments to calculate corners. Each corner is assigned a weight,
which is calculated as the sum of the two numbers of updating points to its
two intersecting line segments. The equation is )1(' ++= illipi nnn ;
5. Update a corner’s coordinates (xci, yci) as weighted average coordinates,
pipi
ipiipii nn
xcnxcnxc ''*'*
++
= and pipi
ipiipii nn
ycnycnyc ''*'*
++
= .
Update the corner’s weight pipipi nnn '+= ;
6. Repeat steps 2-5 till all roof surfaces are processed.
134
CHAPTER 5
EXPERIMENTS AND RESULTS
In previous chapters, the methodology of building model reconstruction from LIDAR
and imagery data is described in details. Some examples were also presented to illustrate
how the proposed method works. To substantially examine this methodology, a large data
set was employed to demonstrate how the method could be applied to reconstructing
building models from data integration. Instead of an autonomous system, the
implementation of this methodology was carried out as a sequence of user guided
operations, namely, building detection, 3D model reconstruction, and model refinement.
They will be demonstrated in the same sequence in this chapter.
5.1. Data
Two different types of data were used in this experiment, LIDAR data and aerial
photographs. The experimental site is located in a suburban area of Houston, Texas. The
LIDAR data has a point density of approximately 1 point per square meter, with a vertical
accuracy of approximate 15 centimeters and a horizontal accuracy of approximate 0.5
135
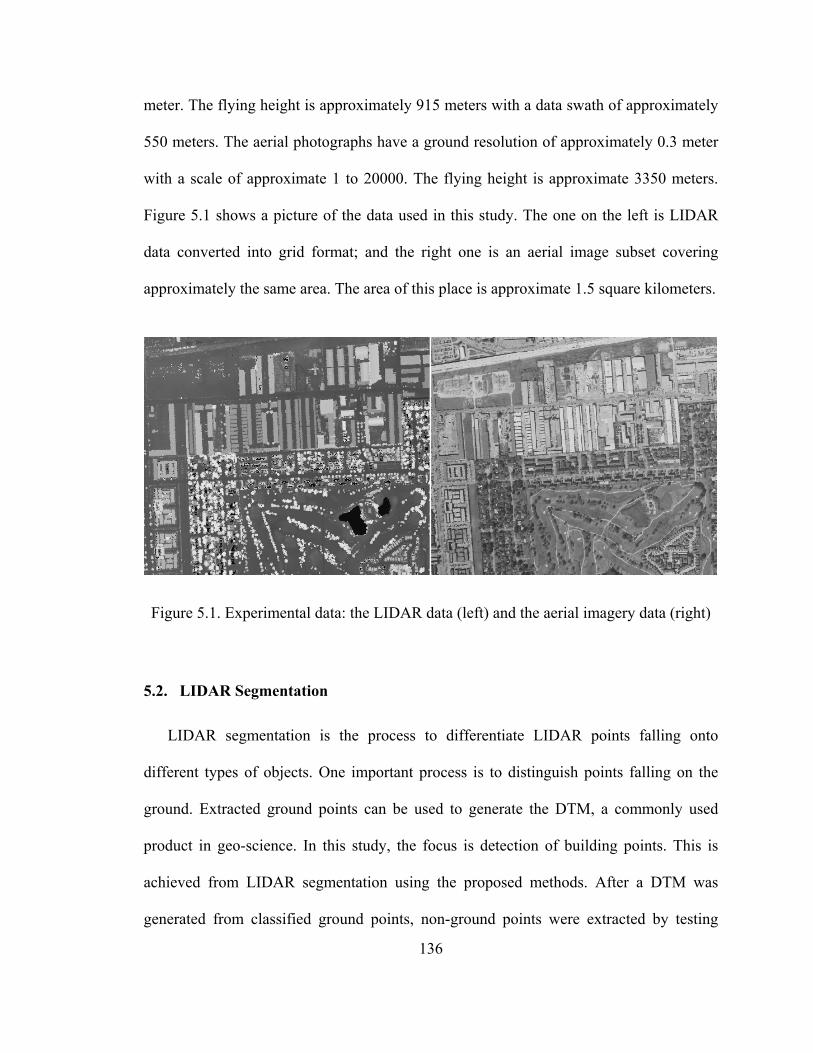
meter. The flying height is approximately 915 meters with a data swath of approximately
550 meters. The aerial photographs have a ground resolution of approximately 0.3 meter
with a scale of approximate 1 to 20000. The flying height is approximate 3350 meters.
Figure 5.1 shows a picture of the data used in this study. The one on the left is LIDAR
data converted into grid format; and the right one is an aerial image subset covering
approximately the same area. The area of this place is approximate 1.5 square kilometers.
Figure 5.1. Experimental data: the LIDAR data (left) and the aerial imagery data (right)
5.2. LIDAR Segmentation
LIDAR segmentation is the process to differentiate LIDAR points falling onto
different types of objects. One important process is to distinguish points falling on the
ground. Extracted ground points can be used to generate the DTM, a commonly used
product in geo-science. In this study, the focus is detection of building points. This is
achieved from LIDAR segmentation using the proposed methods. After a DTM was
generated from classified ground points, non-ground points were extracted by testing
136

their heights above the ground. These non-ground points were then analyzed to
differentiate buildings from other objects such as trees and cars. The information applied
at this process is surface texture and object size.
In order to separate ground points, two methods were proposed in this study, the
planar-fitting segmentation algorithm and the height-jump segmentation algorithm. In
fact, all LIDAR data segmentation algorithms are based on height difference among
different objects. The same principle applies to these two methods. LIDAR data was
converted to grid format for process. The ground region was extracted as the one with the
largest area after different objects were disconnected based on segmentation methods.
The classification of ground points is an iterative process. At the first iteration, the
majority of ground points were distinguished. However, points at boundaries and points
inside an inner court cannot be correctly classified at this time. Boundary points have
similar character as tree points in the planar-fitting segmentation. In the height-jump
method, some classified height-jump points are sitting on the boundary of the ground
region. For inner court points, they form an independent object different from the
detected ground region that is usually connected by a road network. These height-jump
points and inner-court points can be re-classified as ground points by checking their
heights with the DTM generated from ground points detected in the previous iteration.
Figure 5.2 presents a detected ground region after the first iteration and the 5th iteration
using the height-jump algorithm. From this figure, it is clear that the ground region after
the 5th iteration has much more details than the one detected in the first iteration.
137

Figure 5.2. The ground region detected from an iterative process: the 1st iteration (top) and the 5th iteration (bottom)
After a final DTM is generated from ground points, the so-called normalized DSM
can be generated by subtracting the DTM from the DSM, which is generated from
138
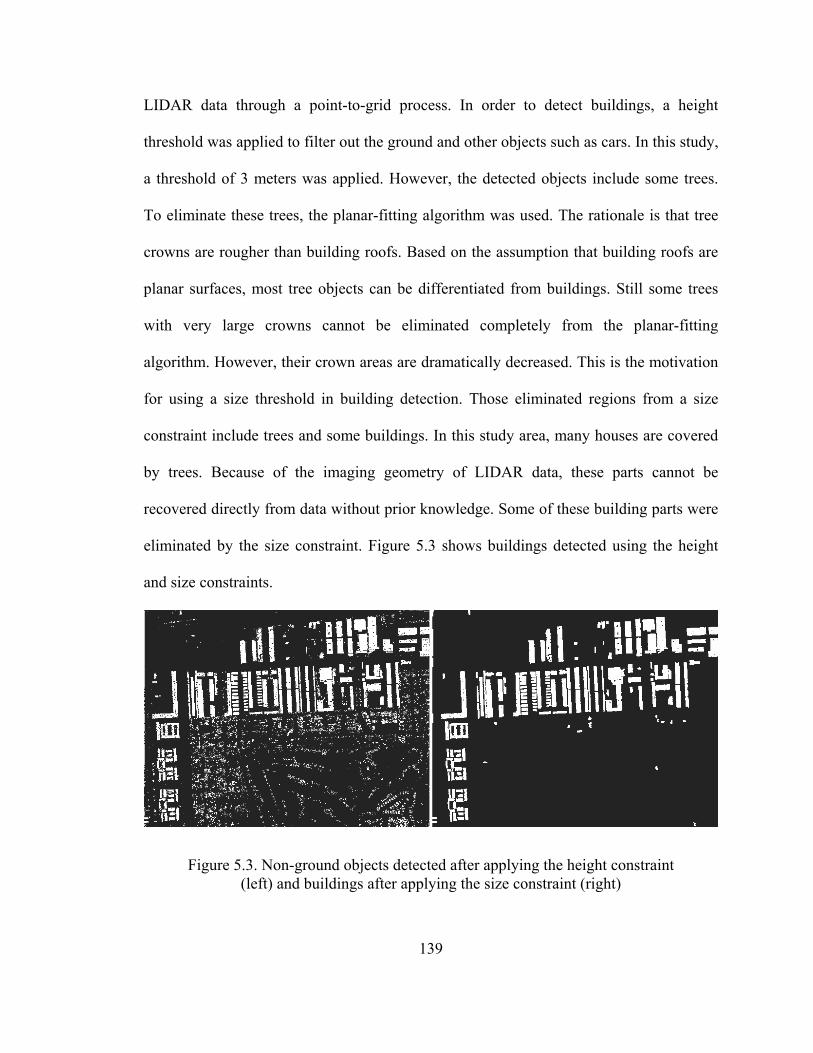
LIDAR data through a point-to-grid process. In order to detect buildings, a height
threshold was applied to filter out the ground and other objects such as cars. In this study,
a threshold of 3 meters was applied. However, the detected objects include some trees.
To eliminate these trees, the planar-fitting algorithm was used. The rationale is that tree
crowns are rougher than building roofs. Based on the assumption that building roofs are
planar surfaces, most tree objects can be differentiated from buildings. Still some trees
with very large crowns cannot be eliminated completely from the planar-fitting
algorithm. However, their crown areas are dramatically decreased. This is the motivation
for using a size threshold in building detection. Those eliminated regions from a size
constraint include trees and some buildings. In this study area, many houses are covered
by trees. Because of the imaging geometry of LIDAR data, these parts cannot be
recovered directly from data without prior knowledge. Some of these building parts were
eliminated by the size constraint. Figure 5.3 shows buildings detected using the height
and size constraints.
Figure 5.3. Non-ground objects detected after applying the height constraint
(left) and buildings after applying the size constraint (right)
139
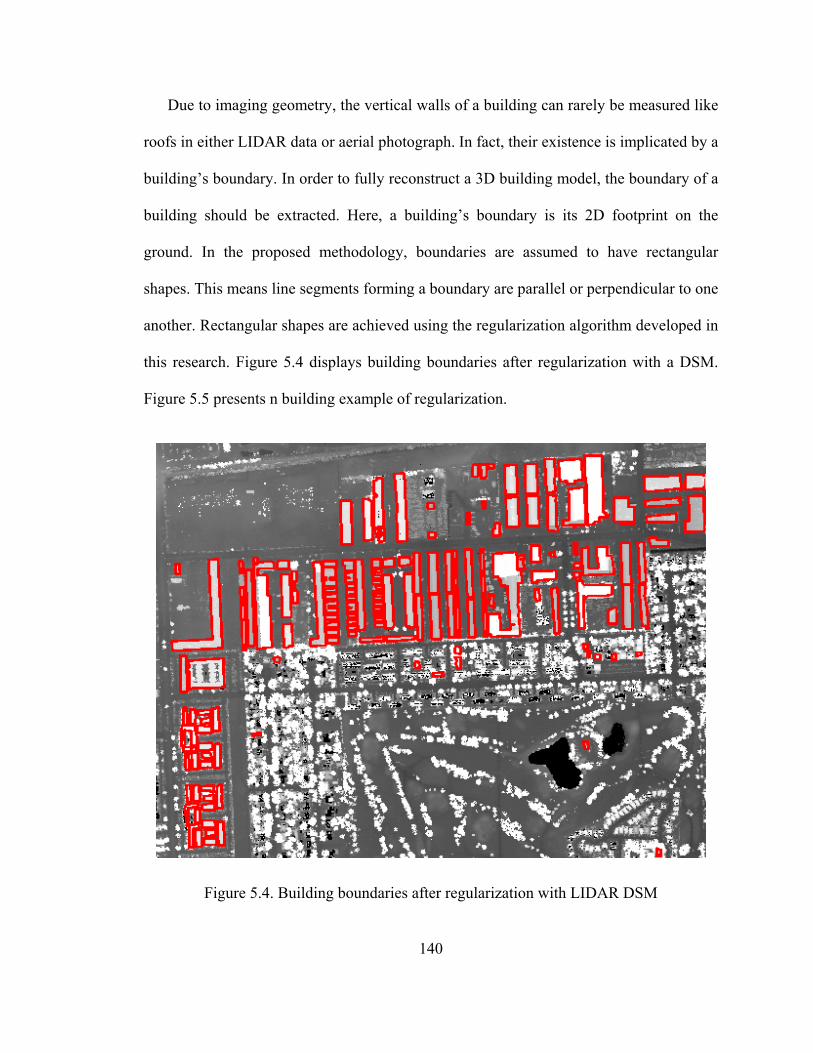
Due to imaging geometry, the vertical walls of a building can rarely be measured like
roofs in either LIDAR data or aerial photograph. In fact, their existence is implicated by a
building’s boundary. In order to fully reconstruct a 3D building model, the boundary of a
building should be extracted. Here, a building’s boundary is its 2D footprint on the
ground. In the proposed methodology, boundaries are assumed to have rectangular
shapes. This means line segments forming a boundary are parallel or perpendicular to one
another. Rectangular shapes are achieved using the regularization algorithm developed in
this research. Figure 5.4 displays building boundaries after regularization with a DSM.
Figure 5.5 presents n building example of regularization.
Figure 5.4. Building boundaries after regularization with LIDAR DSM
140
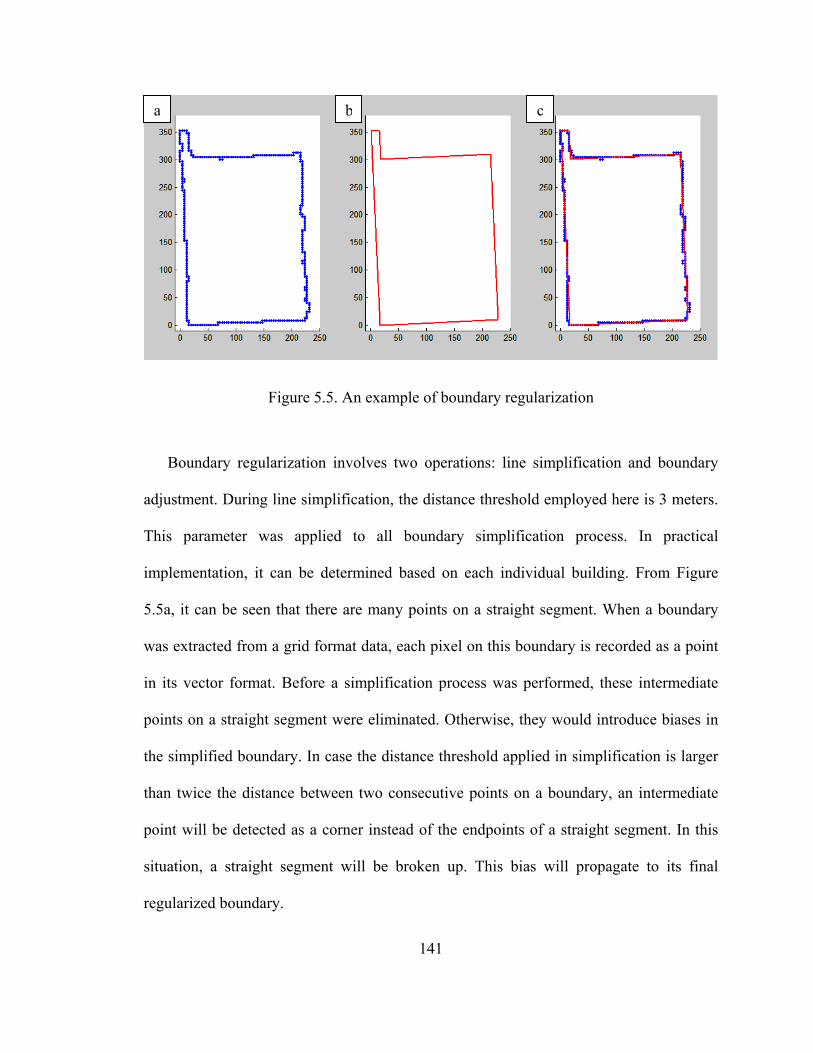
cba
Figure 5.5. An example of boundary regularization
Boundary regularization involves two operations: line simplification and boundary
adjustment. During line simplification, the distance threshold employed here is 3 meters.
This parameter was applied to all boundary simplification process. In practical
implementation, it can be determined based on each individual building. From Figure
5.5a, it can be seen that there are many points on a straight segment. When a boundary
was extracted from a grid format data, each pixel on this boundary is recorded as a point
in its vector format. Before a simplification process was performed, these intermediate
points on a straight segment were eliminated. Otherwise, they would introduce biases in
the simplified boundary. In case the distance threshold applied in simplification is larger
than twice the distance between two consecutive points on a boundary, an intermediate
point will be detected as a corner instead of the endpoints of a straight segment. In this
situation, a straight segment will be broken up. This bias will propagate to its final
regularized boundary.
141
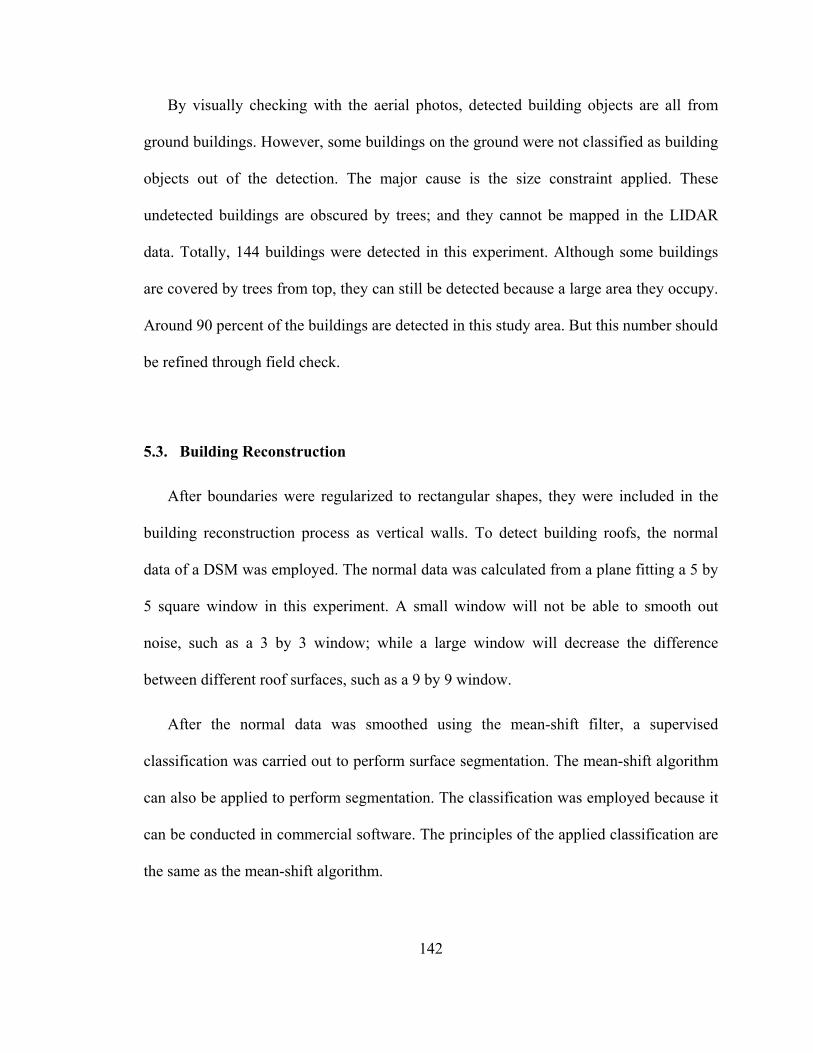
By visually checking with the aerial photos, detected building objects are all from
ground buildings. However, some buildings on the ground were not classified as building
objects out of the detection. The major cause is the size constraint applied. These
undetected buildings are obscured by trees; and they cannot be mapped in the LIDAR
data. Totally, 144 buildings were detected in this experiment. Although some buildings
are covered by trees from top, they can still be detected because a large area they occupy.
Around 90 percent of the buildings are detected in this study area. But this number should
be refined through field check.
5.3. Building Reconstruction
After boundaries were regularized to rectangular shapes, they were included in the
building reconstruction process as vertical walls. To detect building roofs, the normal
data of a DSM was employed. The normal data was calculated from a plane fitting a 5 by
5 square window in this experiment. A small window will not be able to smooth out
noise, such as a 3 by 3 window; while a large window will decrease the difference
between different roof surfaces, such as a 9 by 9 window.
After the normal data was smoothed using the mean-shift filter, a supervised
classification was carried out to perform surface segmentation. The mean-shift algorithm
can also be applied to perform segmentation. The classification was employed because it
can be conducted in commercial software. The principles of the applied classification are
the same as the mean-shift algorithm.
142
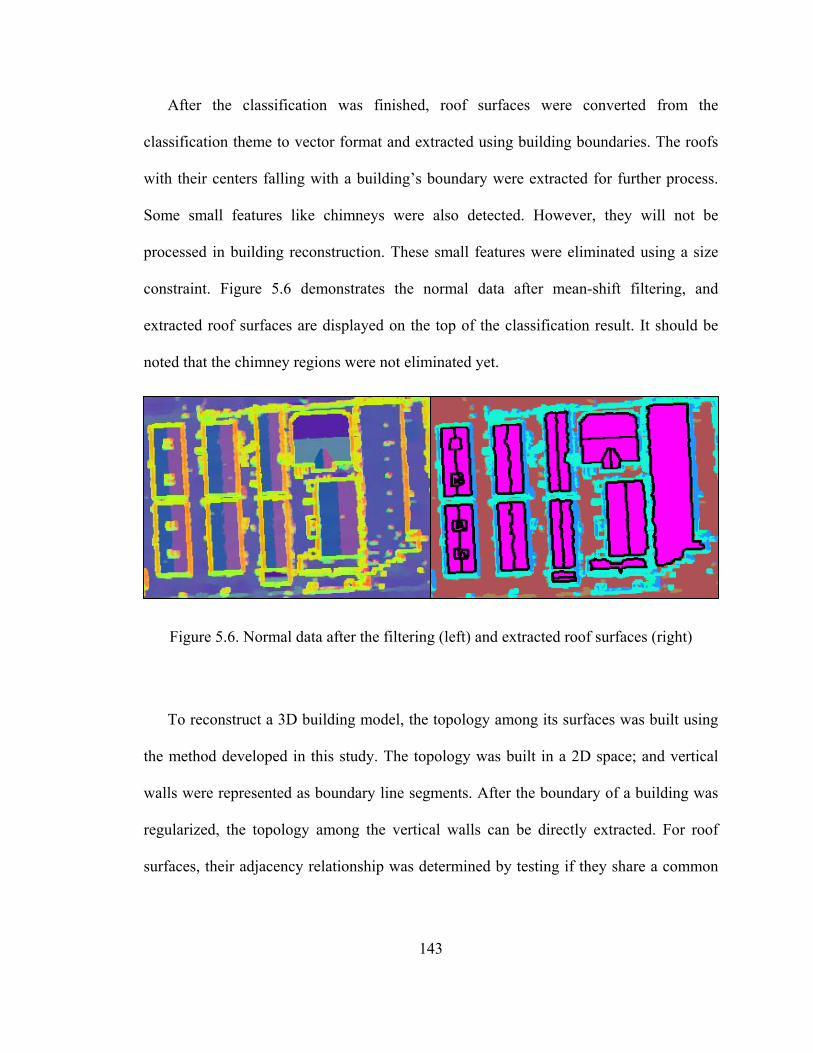
After the classification was finished, roof surfaces were converted from the
classification theme to vector format and extracted using building boundaries. The roofs
with their centers falling with a building’s boundary were extracted for further process.
Some small features like chimneys were also detected. However, they will not be
processed in building reconstruction. These small features were eliminated using a size
constraint. Figure 5.6 demonstrates the normal data after mean-shift filtering, and
extracted roof surfaces are displayed on the top of the classification result. It should be
noted that the chimney regions were not eliminated yet.
Figure 5.6. Normal data after the filtering (left) and extracted roof surfaces (right)
To reconstruct a 3D building model, the topology among its surfaces was built using
the method developed in this study. The topology was built in a 2D space; and vertical
walls were represented as boundary line segments. After the boundary of a building was
regularized, the topology among the vertical walls can be directly extracted. For roof
surfaces, their adjacency relationship was determined by testing if they share a common
143
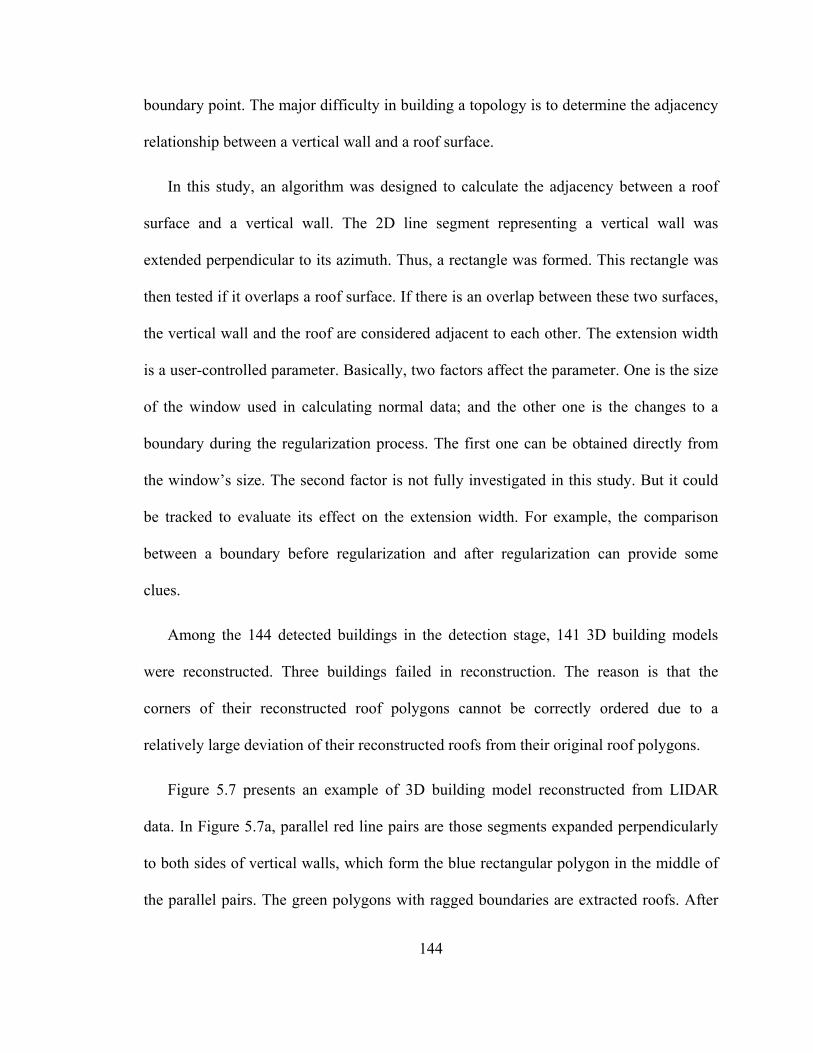
boundary point. The major difficulty in building a topology is to determine the adjacency
relationship between a vertical wall and a roof surface.
In this study, an algorithm was designed to calculate the adjacency between a roof
surface and a vertical wall. The 2D line segment representing a vertical wall was
extended perpendicular to its azimuth. Thus, a rectangle was formed. This rectangle was
then tested if it overlaps a roof surface. If there is an overlap between these two surfaces,
the vertical wall and the roof are considered adjacent to each other. The extension width
is a user-controlled parameter. Basically, two factors affect the parameter. One is the size
of the window used in calculating normal data; and the other one is the changes to a
boundary during the regularization process. The first one can be obtained directly from
the window’s size. The second factor is not fully investigated in this study. But it could
be tracked to evaluate its effect on the extension width. For example, the comparison
between a boundary before regularization and after regularization can provide some
clues.
Among the 144 detected buildings in the detection stage, 141 3D building models
were reconstructed. Three buildings failed in reconstruction. The reason is that the
corners of their reconstructed roof polygons cannot be correctly ordered due to a
relatively large deviation of their reconstructed roofs from their original roof polygons.
Figure 5.7 presents an example of 3D building model reconstructed from LIDAR
data. In Figure 5.7a, parallel red line pairs are those segments expanded perpendicularly
to both sides of vertical walls, which form the blue rectangular polygon in the middle of
the parallel pairs. The green polygons with ragged boundaries are extracted roofs. After
144
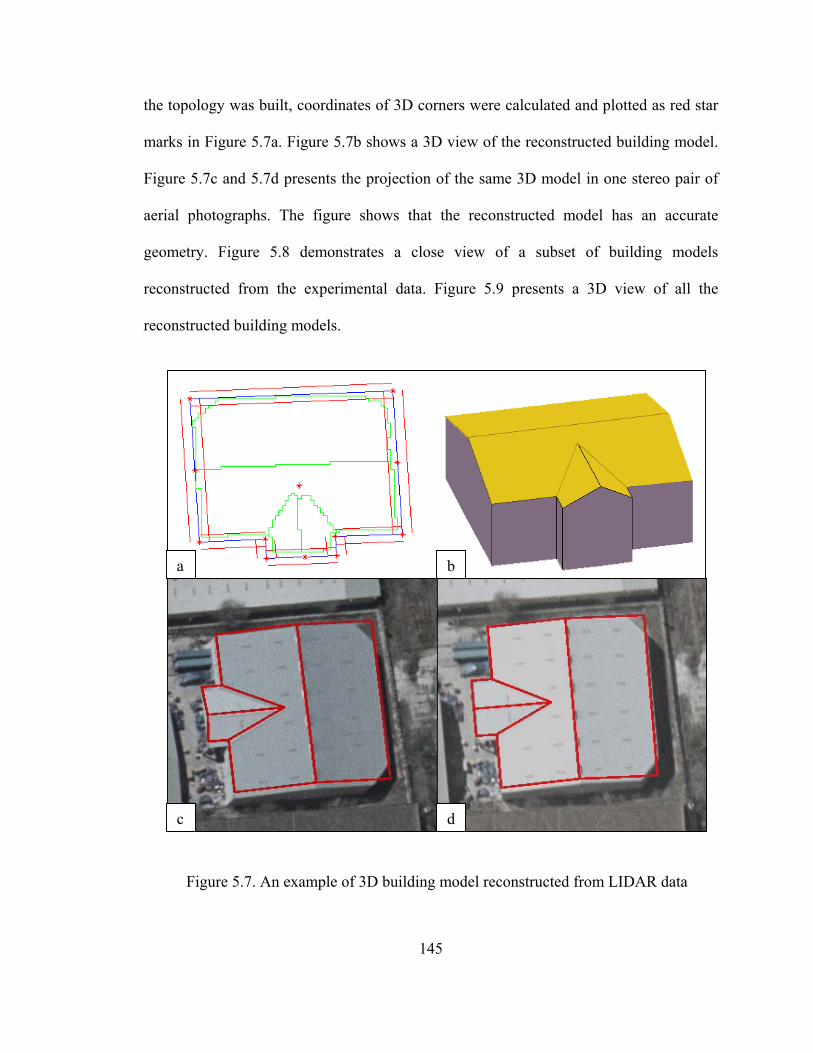
the topology was built, coordinates of 3D corners were calculated and plotted as red star
marks in Figure 5.7a. Figure 5.7b shows a 3D view of the reconstructed building model.
Figure 5.7c and 5.7d presents the projection of the same 3D model in one stereo pair of
aerial photographs. The figure shows that the reconstructed model has an accurate
geometry. Figure 5.8 demonstrates a close view of a subset of building models
reconstructed from the experimental data. Figure 5.9 presents a 3D view of all the
reconstructed building models.
dc
ba
Figure 5.7. An example of 3D building model reconstructed from LIDAR data
145

Figure 5.8. A close view of 3D building models
Figure 5.9. 3D view of all reconstructed building models
146
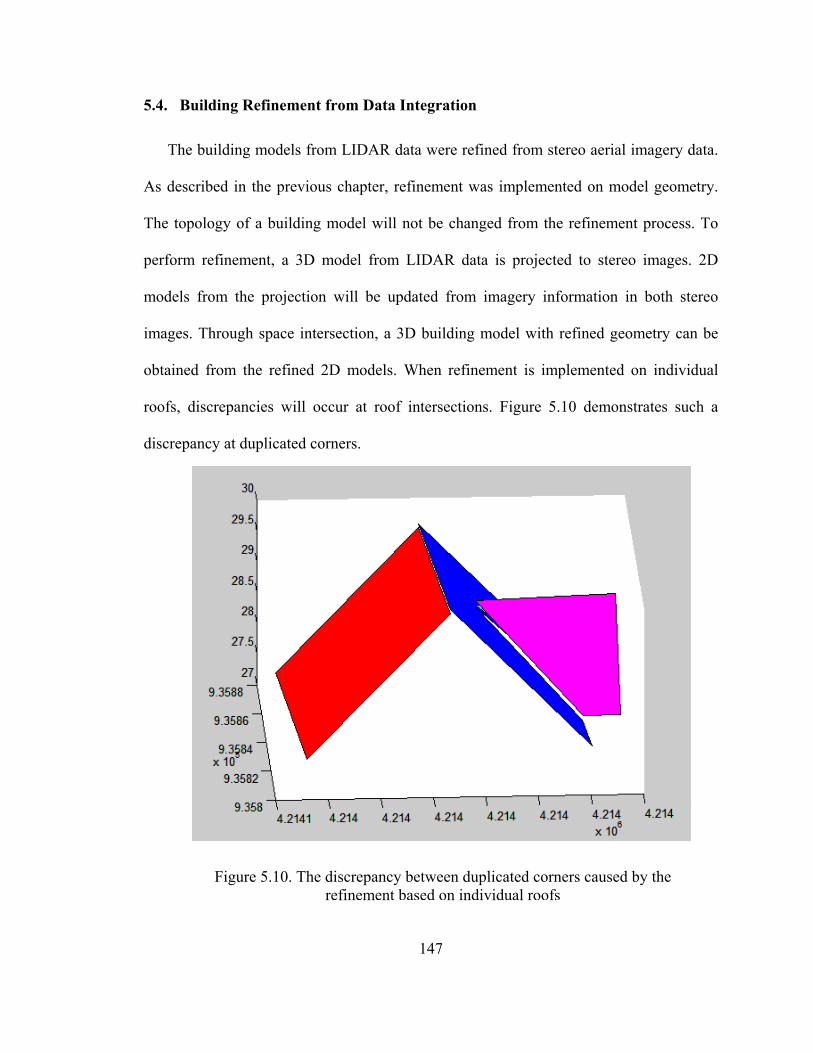
5.4. Building Refinement from Data Integration
The building models from LIDAR data were refined from stereo aerial imagery data.
As described in the previous chapter, refinement was implemented on model geometry.
The topology of a building model will not be changed from the refinement process. To
perform refinement, a 3D model from LIDAR data is projected to stereo images. 2D
models from the projection will be updated from imagery information in both stereo
images. Through space intersection, a 3D building model with refined geometry can be
obtained from the refined 2D models. When refinement is implemented on individual
roofs, discrepancies will occur at roof intersections. Figure 5.10 demonstrates such a
discrepancy at duplicated corners.
Figure 5.10. The discrepancy between duplicated corners caused by the refinement based on individual roofs
147
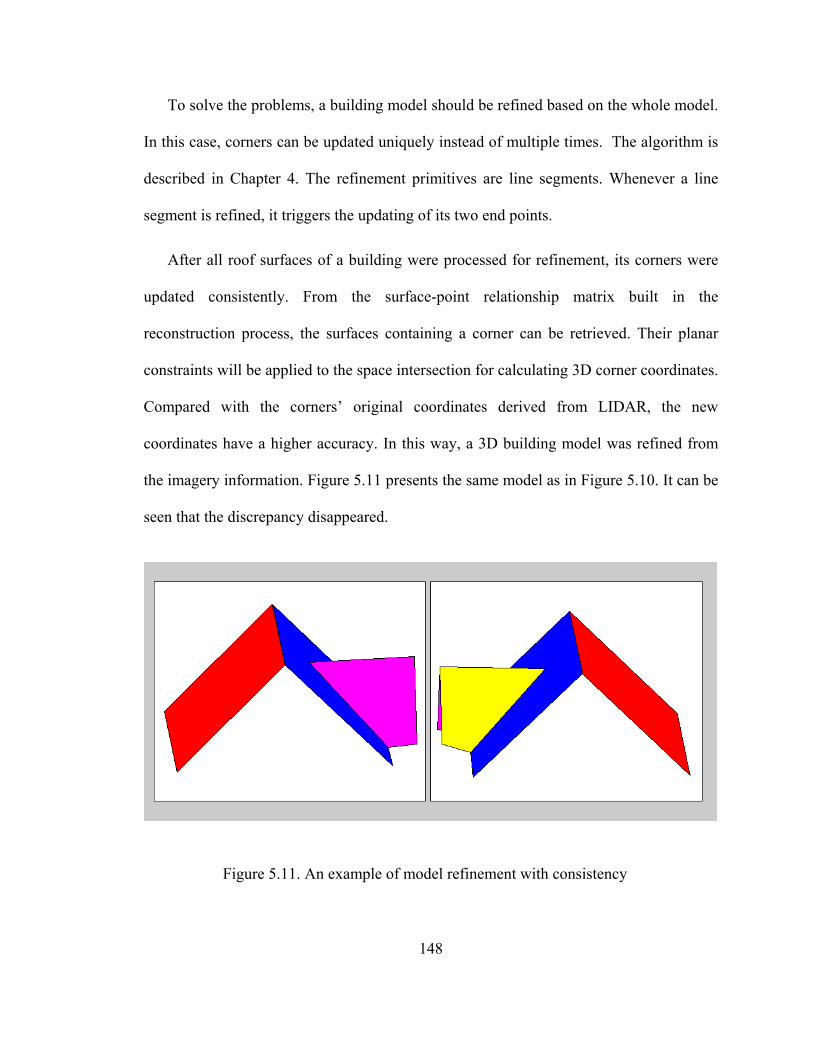
To solve the problems, a building model should be refined based on the whole model.
In this case, corners can be updated uniquely instead of multiple times. The algorithm is
described in Chapter 4. The refinement primitives are line segments. Whenever a line
segment is refined, it triggers the updating of its two end points.
After all roof surfaces of a building were processed for refinement, its corners were
updated consistently. From the surface-point relationship matrix built in the
reconstruction process, the surfaces containing a corner can be retrieved. Their planar
constraints will be applied to the space intersection for calculating 3D corner coordinates.
Compared with the corners’ original coordinates derived from LIDAR, the new
coordinates have a higher accuracy. In this way, a 3D building model was refined from
the imagery information. Figure 5.11 presents the same model as in Figure 5.10. It can be
seen that the discrepancy disappeared.
Figure 5.11. An example of model refinement with consistency
148

5.5. Discussion
Building models are important information applied in many disciplines. Building
reconstruction is the process used to calculate parameters of building models in a model
space, which is an abstract of the real world. “Abstract” means that the model space
cannot represent exactly the same details as the real world. Thus, it is normal that some
exceptions or errors will exist in reconstructed models due to limitations from both data
and algorithms applied.
Due to the limitation of LIDAR point data, small features cannot be detected or
reconstructed, such as chimneys. In addition, some buildings close to each other were
detected as one single building because of the lack of points between them. This will
introduce errors in detection results, and it may fail to provide a 3D model reconstruction.
As for imagery data, it is not possible to extract all the information needed for
refinement. The aerial photographs used are optical images. In some places, different
features have similar spectral characteristics. In this situation, the required information
for refinement cannot be extracted. Thus, the refinement in this study was applied to
those building features where required imagery information was available. For buildings
obscured by trees, they either cannot be detected or only a portion of such a building can
be detected. Imagery data cannot provide more information about the obscured parts of
buildings. This problem can be solved or partially solved by integrating other sources of
data into application. For example, hyper-spectral imagery data can be applied to
differentiate trees from buildings. Multi-return LIDAR data can also differentiate trees
from buildings effectively. Another possible solution is to deduce or guess the whole
149
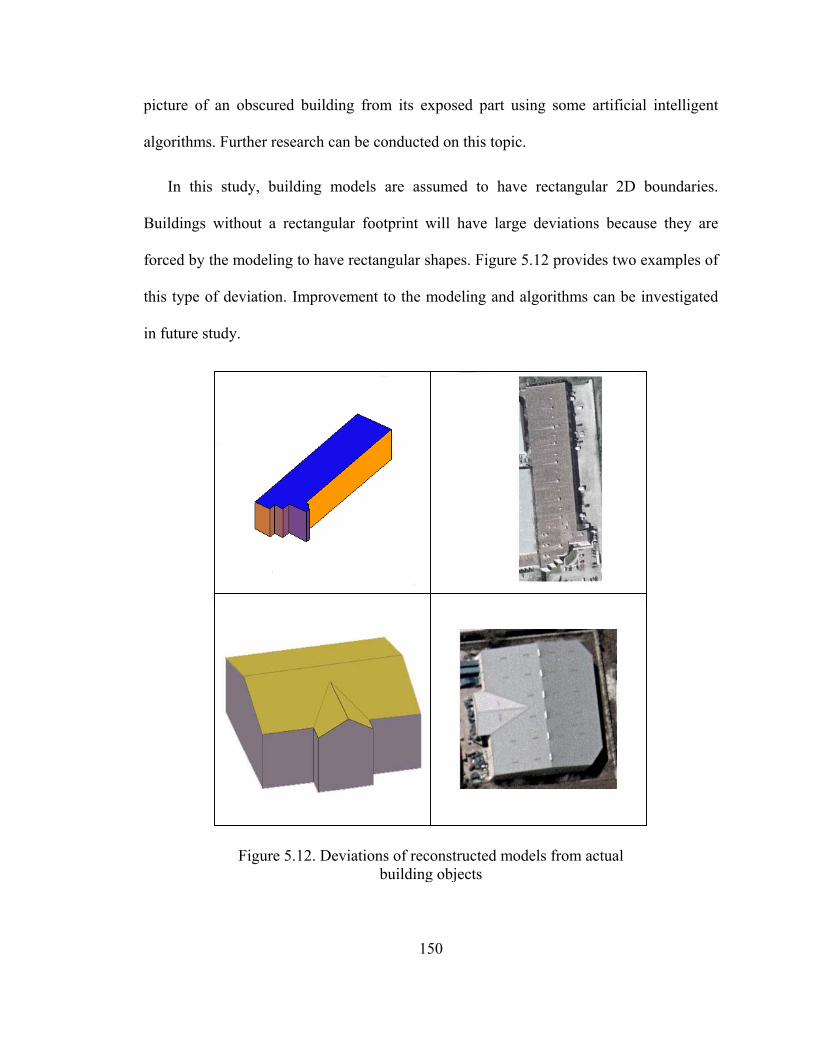
picture of an obscured building from its exposed part using some artificial intelligent
algorithms. Further research can be conducted on this topic.
In this study, building models are assumed to have rectangular 2D boundaries.
Buildings without a rectangular footprint will have large deviations because they are
forced by the modeling to have rectangular shapes. Figure 5.12 provides two examples of
this type of deviation. Improvement to the modeling and algorithms can be investigated
in future study.
Figure 5.12. Deviations of reconstructed models from actual building objects
150

151
In spite of the limitations mentioned above, the methodology developed in this
research can produce high accuracy building models from the integration of LIDAR data
and aerial photographs. The integration provides more information than either single data
type. From the experiments, the refinement from aerial photographs can improve the
accuracy of the models derived from LIDAR.
The co-registration of LIDAR and aerial photographs was not experimented in this
study because the exterior orientation parameters of the photographs were available from
the data provider. The method and related equations are described in chapter 4 for
completeness of the proposed building reconstruction methodology.
CHAPTER 6
CONCLUSIONS AND FUTURE RESEARCH
To reconstruct 3D building models from LIDAR and aerial photographs, a new
methodology is proposed in this research. The methodology is basically comprised of
three procedures: building detection, 3D model reconstruction, and 3D model refinement.
6.1. Conclusions
Under the proposed framework, a 3D building model can be reconstructed using
LIDAR and aerial imagery data. The methodology is implemented on polyhedral building
models. The major contributions of this research can be summarized as followings:
• Two algorithms are developed to perform LIDAR segmentation. Compared with
the algorithms proposed by other researchers, these two algorithms work well in
urban and suburban areas. In addition, they can keep fine features on the ground;
• An algorithm of building boundary regularization is proposed in this study.
Compared with the commonly used MDL algorithm, it is simple to implement
and fast in computation. Longer line segments have larger weights in its
152

adjustment process. This agrees with the fact that longer line segments have more
accurate azimuths provided that the accuracy of ending points are the same for all
segments;
• A new method of 3D building model reconstruction from LIDAR data is
developed. It is comprised of constructing surface topology, calculating corners
from surface intersection, and ordering points of a roof surface in their correct
sequence;
• A new framework of building model refinement from aerial imagery data is
proposed. It refines building models in a consistent approach; and it utilized
stereo imagery information and roof constraints in deriving refined building
models.
This approach doesn’t need much prior information about a building model to be
reconstructed. Thus, it can be used to reconstruct more types of buildings than methods
using a model-based approach. It can also avoid the decomposition of complex buildings
that CSG based methods have to do. Usually, such decomposition is a tricky task. The
experiments have shown that the methodology works successfully in building detection
and building model reconstruction. Besides the methodology of 3D model reconstruction
itself, there are also several methods developed to perform specific tasks in order to
achieve the ultimate goal of 3D building model reconstruction. These methods include
the algorithm for building footprint boundary regularization, the method for constructing
the topology of building surfaces, and the method for filtering surface normal data.
153
6.2. Future Works
It is a fact that no algorithm can work in every situation. The methodology proposed
in this study is not an exception. It also has some limitations. Some of the limitations are
caused by the data applied. For example, two different buildings might be detected as one
single building because they are very close to each other. They are so close that there are
only few points falling on the ground between them. These points are not sufficient to
separate two buildings. Another limitation is that the algorithm in ordering roof polygons
may fail to order a polygon in the correct sequence. This usually happens when a roof
polygon has a narrow part on it. When buildings are covered by trees, either they cannot
be detected or they can only be detected partially. Data from other sources can be applied
in the detection stage to help solve the problem. In addition, multi-return LIDAR data can
be applied to effectively differentiate trees from buildings.
A second type of limitation is from building modeling itself. In this study, buildings
are assumed to have rectangular footprints. Thus, non-rectangular footprints will be
forced to have rectangular shapes as the examples showed in experiments. Another
limitation is that 3D modeling assumes no height breakups within a building. In other
words, no vertical walls in a 3D building model are allowed. These issues can be further
investigated in future research. Major research topics in future work are the following:
• The reconstruction of small features using high-resolution data. For example, a
LIDAR data with a point density of approximately more than 4 points per square
meter can be used to detect dormers;
154
155
• The inclusion of vertical walls inside a building model. New data structure and
algorithm need to be developed to handle such inner vertical walls;
• The integration of LIDAR data and aerial imagery data in building detection. The
spectral information from imagery data could be integrated with LIDAR height
information to perform building detection;
• Model refinement from a single image. Currently, the information used in
refinement is an intersection of the information from both stereo images. For
example, a line segment is updated if and only if its corresponding segment in the
other image is updated. In future research, the union of the information from both
stereo images could be applied;
• Refinement of the topology of a building model from imagery data. New methods
should be developed to refine the topologies of building models derived from
LIDAR data. Fine features or structures not detected/reconstructed from LIDAR
data can be added to building models to be refined.
156
BIBLIOGRAPHY
Ackermann, F., 1999. Airborne laser scanning-present status and future expectations,
ISPRS Journal of Photogrammetry & Remote Sensing, Vol.54 pp64-67, 1999
Aelst, S., X. Wang, and R. H. Zamar, 2003. Linear grouping using orthogonal regression,
http://hajek.stat.ubc.ca/~ruben/website/ORCpaper.pdf, visited March 2004
Alharthy, A. and J. Bethel, 2002. Building extraction and reconstruction from LIDAR
data, Proceedings of ASPRS annual conference, 18-26, Washington
Ameri, B. and D. Fritsch, 2000. Automatic 3D building reconstruction using plane roof
structures, ASPRA Conference, Washington, DC, 2000
Ameri, B., 2000. Feature Based Model Verification (FBMV): A new concept for
hypothesis validation in building reconstruction, IAPRS Vol. XXXIII, Part B3/1,
Comm. III, pp. 24-35, ISPRS Congress, Amsterdam. 2000
Axelsson, P., 1999. Processing of laser scanner data – algorithm and applications, ISPRS
Journal of Photogrammetry & Remote Sensing, Vol.54 pp138 - 147, 1999
Axelsson, P., 2000. DEM generation from laser scanner data using adaptive TIN models,
IAPRA, 33, B4/1

Baltsavias, E. P., 1999. A comparision between photogrammetry and laser scanning,
ISPRS Journal of Photogrammetry & Remote Sensing, Vol.54 pp83-94, 1999
Bourke, Paul. 1987. http://astronomy.swin.edu.au/~pbourke/geometry/insidepoly/
Brenner, C., 2000. Towards fully automatic generation of city models, ISPRS,
Vol.XXXIII, Amsterdan, 2000
Brunn A. and U. Weidner, 1997. Extracting buildings from digital surface models,
IAPRS, 32, Stuttgart
Brunn, A., 2001. Statistical interpretation of DEM and image data for building extraction,
in Baltsavias et al. (edit), Automatic Extraction of Man-made Objects from Aerial and
Space Images (III), 2001.
Cawsey, Alison, 1998. Line Intersection.
http://www.cee.hw.ac.uk/~alison/ds98/node114.html, visited May 7, 2004
Cheng, Y., 1995. Mean shift, mode seeking, and clustering, IEEE Transaction on Pattern
Analysis and Machine Intelligence, Vol.17 (8), pp790-799, 1995
Comaniciu, D. and P. Meer, 2002. Mean shift: a robust approach toward feature space
analysis, IEEE Transaction on Pattern Analysis and Machine Intelligence, Vol.24 (5),
pp603-619, 2002
Csathó, B. and T. Schenk, 2002. Multisensor fusion to aid automatic image
understanding of urban scenes, http://dfc.jrc.it/doc/csatho%20020624.pdf
157
Csathó, B., T. Schenk, D.C. Lee, and S. Filin, 1999. Inclusion of multispectral data into
object recognition, International Archive of Photogrammetry and Remote Sensing,
Vol. 32, Part 7-4-3 W6, Valladolid, Spain, 3-4 June, 1999.
Dissanaike, G. and Sh. Wang, A Critical Examination of Orthogonal Regression and an
Application to tests of firm size interchangeability,
http://les1.man.ac.uk/sapcourses/Semstuff/Ort-wang.PDF, visited March 2004
Elaksher, A., 2002. Building extraction from multiple images, Ph.D. thesis, Purdue
University, 2002
Elaksher, A., J. Bethel, and E. Mikhail, 2002. Building extraction using multiple images,
Proceedings of ACSM-ASPRS 2002 Annual Conference, Washington, May 2002
Elberink, S.O. and H.G. Maas, 2000. The use of anisotropic height texture measurements
for the segmentation of airborne laser scanner data, IAPRS, 33, Amsterdam
Elberink, S.O. and H.G. Maas, 2000. The use of anisotropic height texture measurements
for the segmentation of airborne laser scanner data, IAPRS, 33, Amsterdam
Förstner, W., 1999. 3D-City Models: Automatic and semiautomatic acquisition methods.
http://www.ifp.uni-stuttgart.de/publications/phowo99/foerstner.pdf, visited in 2002.
Frère, D., M. Hendrickx, J. Vandekerckhove, T. Moons and L. Van Gool, 1997. On the
reconstruction of urban house roofs from aerial images, in Automatic Extraction of
Man-made Objects from Aerial and Space Images (II), edited by Gruen et al., 1997.
158
Fua, P. and C. Brechbüler, 1997. Imposing hard constraints on deformable models
through optimization in orthogonal subspaces, Computer Vision and Image
Understanding, 65(2):148-162
Fuchs, F., 2001. Building reconstruction in urban environment: a graph-based approach,
in Baltsavias et al. (edit), Automatic Extraction of Man-made Objects from Aerial and
Space Images (III), 2001.
Fukunaga, K. and L.D. Hostetler, 1975. The estimation of the gradient of a density
function, with applications in pattern recognition, IEEE Transaction on Pattern
Analysis and Machine Intelligence, Vol.IT21 (1), pp32-40, 1975
Gamba, P., 2000. Digital Surface Models and Building Extraction: A Comparision of
IFSAR and LIDAR Data, IEEE Transactions on Geoscience and Remote Sensing,
Vol.38, No.4, July 2000
Geogescu, B., I. Shimshoni, and P. Meer, 2003. Mean shift based clustering in high
dimensions: a texture classification example, Proceedings of the 9th IEEE
International Conference on Computer Vision, 2003
Haala, N. and C. Brenner, 1999. Extraction of buildings and trees in urban environments,
ISPRS Journal of Photogrammetry & Remote Sensing, Vol.54 pp130 - 137, 1999
Haala, N. and M. Hahn, 1995. Data fusion for the detection and reconstruction of
buildings. In Automatic Extraction of Man-Made Objexts from Aerial and Space
Images, edited by A. Gruen, O. Kuebler and P. Agouris, 1995.
159

Haala, N., C. Brenner, and K. Anders, 1998. 3D urban GIS from laser altimeter and 2D
map data, http://www.ifp.uni-stuttgart.de/publications/1998/ohio_laser.pdf, visited
July 2003
Habib, A.F., S.W. Shin, and M.F. Morgan, 2002. Automatic pose estimation of imagery
using free-form control linear features. ISPRS Commission III Symposium
“Photogrametric Computer Vision”, Graz, Austria, September 9-13, 2002
Hough, P.V.C., 1962. Method and means for recognizing Complex Patterns. U.S. Patent
3.069.654
Hu, Y. and C.V. Tao, 2002. Bald DEM generation and building extraction using range
and reflectance LIDAR data, Proceeding of ACSM-ASPRS 2002 Annual Conference,
Washington, D.C. (CD-ROM)
Hubeli, A., K. Meyer, and M. Gross, 2000. Mesh edge detection,
http://graphics.cs.ucdavis.edu/hvm00/abstracts/hubeli.pdf
Huising, E.J. and L.M. G. Pereira, 1998. Errors and accuracy estimates of laser data
acquired by various laser scanning systems for topographic applications, ISPRS
Journal of Photogrammetry & Remote Sensing, Vol.53 pp245-261, 1998
Iisaka, J. and T. S.A., 2000. Image analysis of remote sensing data integrating spectral
and spatial features of objects,
http://www.gisdevelopment.net/aars/acrs/2000/ts9/imgp0013.shtml, ACRS 2000
Kilian, J., N. Haala, and M. Englich, 1996. Capture and evaluation of airborne laser
scanner data, IAPRS, 31, B3
160
Kraus, K. and N. Pfeifer, 1998. Determination of terrain models in wooded areas with
airborne laser scanner data, ISPRS Journal of Photogrammetry & Remote Sensing, 53
(1998): 193-203
Lacroix, V. and M. Acheroy, 1998. Feature extraction using the constrained gradient,
ISPRS Journal of Photogrammetry & Remote Sensing, Vol.53 pp85 - 94, 1998
Lee, H. and N. H., Younan, 2003. DEM extraction of LIDAR returns via adaptive
processing, IEEE Transaction on Geoscience and Remote Sensing, 41(9): 2063-2069
Lin Ch., A. Huertas, and R. Nevatia, 1995. Detection of buildings from monocular
images. In Automatic Extraction of Man-Made Objexts from Aerial and Space
Images, edited by A. Gruen, O. Kuebler and P. Agouris, 1995.
Lohmann, P. and A. Koch, 1999. Quality assessment of laser-scanner-data,
http://www.ipi.uni-
hannover.de/html/publikationen/1999/koch/isprs99%20koch%20lohmann.pdf, visited
in September 2003
Lohmann, P., 2001. Segmentation and filtering of laser scanner digital surface models,
IAPRS, 34, 2
Lohmann, P., A. Kock, and M. Schaeffer, 2000. Approaches to the filtering of laser
scanner data, IAPRS, 33, Amsterdam
Ma, Y.W. and B.S. Manjunath, 1997. Edge flow: a framework of boundary detection and
image segmentation, Proceedings of the IEEE Conference on Computer Vision and
pattern recognition, Puerto Rico, 1997
161
Maas, H. and G. Vosselman, 1999. Two algorithms for extracting building models from
raw laser altimetry data, ISPRS Journal of Photogrammetry & Remote Sensing,
Vol.54 pp153 - 163, 1999
Maas, H.G., 1999a. Closed solution for the determination of parametric building models
from invariant moments of airborne laserscanner data, ISPRS conference ‘Automatic
Extraction of GIS Objects from Digital Imagery’, Munchen/Germany, 8-10. 9. 1999’.
(IAPRS Vol.32 pp193-199)
Maas, H.G., 1999b. Fast determination of parametric house models from dense airborne
laserscanner data, ISPRS workshop on mobile mapping technology, Bangkok,
Thailand, April 21-23, 1999.
Maas, H.G., 1999c. The potential of height texture measures for the segmentation of
airborne laserscanner data, 4th International Airborne Remote Sensing and Exhibition
/ 21st Canadian Symposium on Remote Sensing, Ottawa, Ontario, Canada, 21-24 June
1999
Matikainen, L., J. Hyyppä, and H. Hyyppä, 2003. Automatic detection of buildings from
laser scanner data for map updating, IAPRS, 34, Dresden
Mayer, Stefan, 2001. Constrained optimization of building contours from high-resolution
ortho-images, ICIP 2001, Thessaloniki, Greece
McGlone, J.Ch. and J. A. Shufelt, 1994. Projective and object space geometry for
monocular building extraction. Proceedings of IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, 1994. Page(s): 54 -61
162
Mcintosh, K. and A. Krupnik, 2002. Integration of laser-derived DSMs and matched
image edges for generating an accurate surface model, ISPRS Journal of
photogrammetry & remote sensing, Vol. 56 pp167-176, 2002.
Morgan, M. and A. Habib, 2002. Interpolation of LIDAR data and automatic building
extraction, Proceeding of ACSM-ASPRS 2002 Annual Conference, Washington, D.C..
(CD-ROM)
Murakami, H., K. Nakagawa, H. Hasegawa, T. Shibata, and E. Iwanami, 1999. Change
detection of buildings using an airborne laser scanner, ISPRS Journal of
Photogrammetry & Remote Sensing, Vol.54 pp148 - 152, 1999.
Nevatia, R., Ch. Lin, and A. Huertas, 1997. A system for building detection from aerial
images. In Automatic Extraction of Man-Made Objects from Aerial and Space Images
(II), edited by A. Gruen, O. Kuebler and P. Agouris, 1997.
Pilu, M. and A. Lorusso, 1997. Uncalibrated stereo correspondence by singular value
decomposition, http://www.hpl.hp.co.uk/people/mp/docs/bmvc97/index.htm#content
Rottensteiner, DI. F., 2001. Semi-automatic extraction of buildings based on hybrid
adjustment using 3D surface models and management of building data in a TIS, PhD
thesis, http://www.ipf.tuwien.ac.at/fr/buildings/diss/dissertation.html
Rottensteiner, F. and Ch. Briese, 2002. A new method for building extraction in urban
areas from high-resolution LIDAR data, IAPRS, 34, Graz
Schenk, T., 1997. Towards automatic aerial triangulation, ISPRS Journal of
Photogrammetry & Remote Sensing, Vol.52 pp110-121, 1997
163

Schenk, T., 2002. Fusion of LIDAR and Imaging Data, in Mapping Geo-Surficial
Processing Using Laser Altimetry, The 3rd International LIDAR Workshop,
Columbus, Ohio, 2002.
Schiewe J., 2003. Integration of multi-sensor data for landscape modeling using a region
based approach, ISPRS Journal of Photogrammetry & Remote Sensing, 57 (2003):
371-379
Scholze, S., T. Moons and L. Van Gool, 2001. A probabilistic approach to roof patch
extraction and reconstruction, in Baltsavias et al. (edit), Automatic Extraction of Man-
made Objects from Aerial and Space Images (III), 2001.
Scott, G. and H. Longuet-Higgins, 1991. An algorithm for associating the features of two
patterns. In Proceedings of Royal Society London, vol. B244, pp. 21-26, 1991
Seo, S., 2002. Data fusion of aerial images and LIDAR data for automation of building
recognition, The 3rd International LIDAR Workshop, Columbus, Ohio, 2002.
Seo, S., 2003. Model Based Automatic Building Extraction from LIDAR and Aerial
Imagery, Ph.D. dissertation, The Ohio State University, 2003
Sithole, G., 2001. Filtering of laser altimetry data using a slope adaptive filter, IAPRS,
34, 3W4
Spreeuwers, L., K. Schutte, and Zweitze, 1997. A model driven approach to extract
buildings from multi-view aerial images, in Automatic Extraction of Man-made
Objects from Aerial and Space Images (II), edited by Gruen et al., 1997.
164
Stamos, I. and P. K. Allen, 2000. 3-D Model Construction Using Range and Image Data,
http://www.cs.columbia.edu/~allen/PAPERS/cvpr2000.pdf, 2000
Tao, V. and Y. Hu, 2001. A review of post-processing algorithms for airborne LIDAR
data. Proceedings of ASPRS Annual Conference (CD-ROM), 23-27 April, St. Louis,
2001.
Teh, Ch. and R. T. Chin, 1988. On image analysis by the methods of moments, IEEE
Transactions on pattern analysis and machine intelligence. Vol. 10, No. 4, July 1988.
Tomasi, C. and R. Manduchi, 1998. Bilateral filtering for gray and color images,
Proceedings of the 1998 IEEE International Conference on Computer Vision,
Bombay, India
Vosselman, G. and I. Suveg, 2001. Map based building reconstruction from laser data
and images, in Baltsavias et al. (edit), Automatic Extraction of Man-made Objects
from Aerial and Space Images (III), 2001.
Vosselman, G. and S. Dijkman, 2001. 3D building model reconstruction from point cloud
and ground plans, IAPRS, V.34/3-4W3, October, 2001, Annapolis, Maryland
Vosselman, G., 2000. Slope based filtering of laser altimetry data, IAPRS, 33,
Amsterdam
Vosselman, G., 1999. Building reconstruction using planar faces in very high density
height data, IAPRS, V.32/3-2W5
Wang, Zh., 1999. Surface reconstruction for object recognition, Ph.D. dissertation, The
Ohio State University, 1999
165

166
Wehr, A. and U. Lohr, 1999. Airborne laser scanning-an introduction and overview,
ISPRS Journal of Photogrammetry & Remote Sensing, Vol.54 pp68-82, 1999
Weidner, U. and W. Förstner, 1995. Towards automatic building extraction from high-
resolution digital elevation models, ISPRS Journal of Photogrammetry & Remote
Sensing, Vol.50 pp38 - 49, 1995
Wolf, P. R. and B. A. Dewitt, 2000. Elements of Photogrammetry with Applications in
GIS, 3rd edition. Published by Thomas Casson, 2000
Xu, F., X. Niu, and R. Li, 2002. Automatic recognition of civil infrastructure objects
using Hopfield Neural Networks, ASPRS annual conference, 18-26, Washington
Zhao, Zhiyuan, 2001. Line Simplification. http://www-cg-hci.informatik.uni-
oldenburg.de/~da/peters/Kalvin/Doku-CG.htm, visited November 12, 2002
Zimmermann, P., 2001. Automatic building detection analyzing multiple data, in
Baltsavias et al. (edit), Automatic Extraction of Man-made Objects from Aerial and
Space Images (III), 2001.