-
7/31/2019 Barrier Option
1/53
Contents
1 Introduction 1
1.1 Problem overview . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 1
1.2 Literature review . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 4
1.2.1 Uncertain Volatility Model . . . . . . . . . . . . . . . .
. . . . . . . 4
1.2.2 Stochastic exit time control problem . . . . . . . . . . .
. . . . . . . 7
1.2.3 Stochastic control and dominating strategy . . . . . . . .
. . . . . . . 8
1.3 Probability Spaces and Filtrations . . . . . . . . . . . . .
. . . . . . . . . . . 9
1.4 Brownian Motion and Wiener Process . . . . . . . . . . . . .
. . . . . . . . . 10
1.5 Martingales . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 11
2 Single-asset Barrier Option 15
2.1 Pricing and Hedging . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 15
2.2 Practical Issues . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 18
2.3 Numerical simulation . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 19
3 Multi-asset Barrier Options 23
3.1 Pricing . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 23
3.2 Hedging . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 26
3.3 The replicating strategy . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 27
3.4 Two-asset barrier option . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 31
3.5 Optimization problem . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 33
4 Numerical solutions 35
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 35
4.2 Numerical Scheme and algorithm . . . . . . . . . . . . . . .
. . . . . . . . . 36
3
-
7/31/2019 Barrier Option
2/53
CONTENTS CONTENTS
4.2.1 Single-asset case . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 36
4.2.2 Two-asset case . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 40
0
-
7/31/2019 Barrier Option
3/53
Chapter 1
Introduction
1.1 Problem overview
The year of 1973 was a special year for financial mathematics.
In this year, the most out-
standing paper on option pricing by Black and Scholes [14]
appeared. The model is known
as the Black-Scholes formula. Since then, the model has been
very popular among practi-
tioners and researchers, because it is easy to use and open for
development. An important
characteristic of this model is the assumption that the
volatility of the underlying asset is
constant. This assumption has been argued by researchers or
practitioners, especially after
the identification of the so-called volatility smile by
Rubinstein and Reiner [64] who claim
that the volatility is stochastic in the real market. The
constant volatility can not explain
the observed market price for options. As a result, hedging
strategy using a constant value
of volatility can result in a problem.
Realizing this problem, one may try to find another model that
employs volatility which
depends on time and stock prices. However, such a model may
result in a misspecification
of the volatility. El-Karoui, Jeanblanc-Picque, and Shreve [33]
provided conditions under
which the Black-Scholes formula is robust with respect to a
misspecification of volatility.
Romagnoli and Vargiolu in [63], Gozzi and Vargiolu [39],
proposed a new method for the
study of robustness of the Black-Scholes formulae for several
assets. Avellaneda, Levy, and
Paras [2] and Avellaneda and Paras [3], considered the
volatility following stochastic process
but lying on an interval band [min, max]. Then bounds on the
option prices are obtained
by setting the volatility equal to min and max depending on the
convexity or concavity of
the option price functions.
1
-
7/31/2019 Barrier Option
4/53
1.1 Problem overview Introduction
In the case of barrier option or other options where the payoff
function are non-convex,
the method proposed by El-Karoui, Jeanblanc-Picque, and Shreve
[33], is not applicable.
This is due to the fact that the barrier option price may not
increase monotonically with
volatility. Moreover, the value function of the option is
neither convex nor concave. To
sell barrier options, one generally trades them above their
theoretical Black-Scholes price.
Another method used to hedge and price barrier options is by
static hedging. This strategy
does not involve continuous rebalancing as in dynamic hedging.
Such static hedging normally
involves setting up a portfolio at the beginning of the contract
that is guaranteed to match
the payout of the options to be hedged. This method of hedging
is firstly discussed by
Derman, Ergener, and Kani [30]. This paper describes a numerical
algorithm for singlebarrier options in the context of a binomial
tree representing the evolution of a stock with
time and level dependent volatility. In a related paper, Carr,
Ellis and Gupta [19] discuss
the static replication of barrier option under the Black-Scholes
model. Similarly, Brown,
Hobson, and Rogers [17] demonstrate how to set up model-free
overhedges and underhedges
for certain simple classes of single barrier options using a
probability approach.
In this thesis, we analysis the robustness of European
multi-asset barrier option. Our
work is motivated by Gozzi and Vargiolu in [39], but we discuss
hedging strategy of a multi-
asset barrier option, an option governed by a multidimensional
diffusion process. Consider
a riskless asset M whose price is assumed to be constantly 1 for
t [0, t) and d risky asset
whose vector price St = (S1, , Sdt ) follows the dynamic
dSt = SttdWt, (1.1)
where Wt is an d-dimensional Brownian motion under risk-neutral
measure Q. Our main
assumption in this model is that the volatilities are
stochastic, presented in a matrix process
(t)t taking the values in a closed bounded set M(d,n,R). We
define here, M(d,n,R)
is a space of d n real matrices and St is a diagonal matrix who
elements are (S1t , , S
dt ).
Consider a payoff function for a barrier option h(ST)1{>T},
where is the first moment of
time where the stock price hits a bounded domain O Rd
prespecified level of barrier. The
payoff function h in this case is discontinous and the value
function is
v(t, x) = EQ[
h(St,x,Tt )1{>(Tt)}|Ft]
which is not a convex function. Since we work on the assumption
of stochastic volatility,
then the market could be incomplete. As a result, the agent can
not perfectly hedge the
2
-
7/31/2019 Barrier Option
5/53
Introduction 1.1 Problem overview
volatility. Then he uses the superprice to hedge the option.
Following Avellaneda, Levy, and
Paras [2] and Avellaneda and Paras [3], Romagnoli and Vargiolu
[63], Gozzi and Vargiolu
[39], we fix the price of the option as vt = v(t, St) and set a
self-financing portfolio consisting
of quantity t of the risky asset St in the hedging portfolio Xt
as
it =v
Sit(t, St), 0 t T.
Here v is the solution of following nonlinear PDE,
tv(t, x) + H(x, D2xv(t, x)) = 0, t [0, T), x R
d
v(T, x) = h(x) x Rd
v(t, x) = 0, x O
(1.2)
where H is given by
H(x, D2
x
v) =1
2supt
Tr(D2
x
v(t, x)(xt)(xt)).
This is known as the Black-Scholes-Barenblatt equation, a
version of the Hamilton-Jacobi-
Bellman equation. From the financial point of view, in order to
obtain the superprice, the
payoff function h
EQ[
h(St,x,tTt )1{>(Tt)}|Ft]
.
is maximized with respect to . By this strategy, the agent is
able to protect himself against
the worst possible case.
The results of this thesis are Theorem ?? in Chapter 3. We show,
by a probability
approach, that the value function of the exit control problem v
is continuous with respect
to time t and space of price x, and is regular enough to apply
the Ito formula. Using this
regularity we show that the pair (v, ) is a superstrategy, see
Chapter 4, Theorem 3.3. In
the case of a single-asset barrier option, the exit control
problem is a bang-bang solution,
see Theorem 2.1 in Chapter 5. In Chapter 3, Theorem ??, we show
that it =
Siv(t, St)
is bounded. Therefore, choosing as a superstrategy is valid and
makes sense. We also
demonstrate that the value function of the exit control problem
can be approximated by a
sequence of functions (v). We show that v satisfies the dynamic
programming principle
3
-
7/31/2019 Barrier Option
6/53
1.2 Literature review Introduction
(DPP), and v v as 0. We also demonstrate that v is also a
viscosity solution of the
HJB equation.
This kind of approach to stochastic volatility models was
initiated by Avellaneda Levy,
and Paras [2], Avellaneda and Paras [3]. They considered the
case of single-asset European
with different maturity time in the portfolio. The recent paper
by El-Kouri, Jeanblanc-
Picque, and Shreve [33] discuss a similar problem, single-asset
case, but they assume that
the payoff is a convex function. Under this assumption, they
succeed in showing that the
BS equation is robust. This is obtained by dominating the
stochastic volatility with a
deterministic function of the stock price. Romagnoli and
Vargiolu [63] extend this problem
into a multi-asset European derivative. A more detail and deep
discussion in this area isgiven by Gozzi and Vargiolu [39].
1.2 Literature review
Our interest is in hedging strategy using super-replication
method, known also as a dominat-
ing strategy, in a multi-asset barrier option of which the
volatilities are unspecified. We need
to solve the Hamilton-Jacobi-Bellman equation, which is a
version stochastic exit control
problem. Therefore, we need to review some topics related to
this thesis.
1.2.1 Uncertain Volatility Model
According to Arbitrage Pricing Theory, if the market presents no
arbitrage opportunities,
there exists a probability measure on future scenario such that
the price of any security
is the expectation of its discounted cash-flows, Duffie [28].
Such a probability is known
as a martingale measure, Harisson and Pliska [40]. It is true
that pricing measure is often
difficult to calculate precisely and there may exist more than
one measure which is consistent
with a given market 1, Avellaneda, Levy, and Paras [2]. Based on
this fact, it is useful to
view incomplete markets as they are reflecting the many choices
for derivatives asset prices
that can exist in an uncertainty market. The source of the
uncertainty mainly comes from
unpredictable volatility. Avellaneda, Levy, and Paras [2] and
Avellaneda and Paras [3],1Uniqueness of the martingale is
equivalent to market completeness. A model for security market is
said
to be complete if the volatility matrix is full rank in the
sense that the number of underlying asset equals to
the number of source of randomness.
4
-
7/31/2019 Barrier Option
7/53
Introduction 1.2 Literature review
assume that the underlying asset St follows a diffusion process
with non-constant interest
rate and volatility
dSt = rtStdt + tStdWt. (1.3)
The volatility process (t) fluctuates within an interval
0 < min t max. (1.4)
The volatility process (t) that satisfies (1.4) induces a unique
probability measure Q = Q
on the space of prices St. Let denote the set of all measures
that can be induced within
the constraint (1.4). Now consider a portfolio X ofd options
with expiration dates t1 t2 td1 and payoff functions h1(St1),
h2(St2), , hd(Std). Avellaneda, Levy, and Paras [2]
show that the present day worst-case scenario estimate for the
buyer side is the value v(t, St)
of the function
v(t, St) = supt
EQ
d
i:tit
etit rsdshi(Sti)
(1.5)
where EQ is the expectation operator with respect to the measure
Q and the dynamic
price process (1.3). Then, by Itos theorem, the problem can be
converted into a nonlinear
partial differential equation (DPP), which is a version of the
Black-Scholes-Barenblatt (BSB)
equation.
Now we consider the multi-asset case. Consider a riskless asset
M whose price is assumed
to be constantly 1 for t [0, t) and d risky assets whose vector
price St = (S1, , Sdt ) follows
the dynamic
dSt = SttdWt. (1.6)
Here W is an d-dimensional Brownian motion under risk-neutral
measure Q. The matrix
process () takes the values in a closed bounded set M(d,n,R),
and St is a diagonal
matrix who elements are (S1t , , Sdt ). Such a problem has been
considered by Lyons [55],
Romagnoli and Vargiolu [63], Gozzi and Vargiolu [39]. The fair
price v(, ) of the multi-asset
contingent claim at time t 0 can be found via the non-arbitrage
principle, Duffie [28]:
v(t, x) = supt
EQ[
h(St,x,tTt )]
. (1.7)
Then v must satisfy the associated Black-Scholes-Barenblatt
(BSB) equation which is a
5
-
7/31/2019 Barrier Option
8/53
1.2 Literature review Introduction
version of the Hamilton-Jacobi-Bellman (HJB):
tv(t, x) +
1
2supt
Tr(D2xv(t, x)(xt)(xt)) = 0, t [0, T), x Rd
v(T, x) = h(x) x Rd
(1.8)
where D2xv(t, x) =
2
xixjv(t, x)
ij
.
The situation becomes more complex if the multi-asset European
options and barrier
options are combined in a portfolio. Let be the first moment of
time when the stock price
hits the prespecified level of barrier. Then, the price of the
barrier options is given by
v(t, x) = sup
EQ[
h(St,x,Tt )1{>(Tt)}]
. (1.9)
The standard approach to hedge this option is to model the
behaviour of the underlying
asset and from the model, a fair price then derived. This price
is expected to be perfectly
hedging the contingent claim. The approach is to maintain an
ever-changing position in
the underlying assets. This method is known as dynamic hedging
which needs continuous
rebalancing: maintaining the tracking error, that is the
difference between the actual value
and the theoretical value of a self-financing portfolio, to be
always positive. In works by
Avellaneda Levy, and Paras [2], Avellaneda and Paras [3], and
El-Kouri, Jeanblanc-Picque,
and Shreve [33], the maximum volatility always overestimates the
claim. This does not
happen if our claim is a barrier option. The maximum volatility
sometimes underestimates
the contingent claim price. This is due to the fact that the
option price function can not be
convex or concave for all prices x and all times t. Therefore,
the option price is not increasing
monotonically as the volatility increases.
The problem now comes from the fact that the value function
might not be smooth
enough to satisfy the boundary condition v = 0 in the classical
sense. To solve this problem,
Crandall and Lions [21], Crandall, Ishii, and Lions [22], Lions
[52],[53], [54], Fleming and
Soner [34] introduces the notion of a viscosity solution. This
notion is not only giving a sense
of a continuous solution for the value function v, but also a
sense of a discontinuous viscosity
solution. Equation (1.8) is a version of a stochastic exit
control problem which is extensively
studied, see for example Barles and Burdeau [6], Barles and Rouy
[7], Barles and Perthame
[8],[9], Barles and Souganidis [10]. For the non-degenerate case
of (1.12), one may refer to
6
-
7/31/2019 Barrier Option
9/53
Introduction 1.2 Literature review
Bensoussan [11], Fleming and Rishel [35], Fleming and Soner
[34], Krylov [49], where the
classical PDE approaches for stochastic control problem are
discussed.
1.2.2 Stochastic exit time control problem
For the exit control problem the main difficulty comes from the
treatment of the boundary
condition. As suggested by Lions [52] or Barles and Rouy [7], it
is rather simple to create
examples in which the value function is continuous in an open
set O and can be extended
continuously to O, but where its extension does not satisfy the
boundary condition. Problems
may also occur when the diffusion degenerates along the normal
direction to the boundary.
Following Barles and Rouy [7], it is necessary to relax the
boundary condition which has to
be read as
min
tv(t, x) + H(x, D2xv(t, x), v(t, x)
0 on O
and
max
tv(t, x) + H(x, D2xv(t, x), v(t, x)
0 on O.
These inequalities have to be understood in the viscosity sense.
The viscosity notion has been
well presented in the Users Guide of Crandall, Ishii and Lions
[22], including the presentation
of these boundary conditions. This type of boundary condition
was first considered by Lions
[52], Barles and Perthame [8],[9], Barles and Souganidis [10]. A
more general definition
of viscosity solution, including equations with discontinuous
Hamiltonian is discussed in
Fleming and Soner [34], Bardi and Capuzzo-Dolcetta [4]
There are two strategies to solve the this type of problem: the
continuous approach
and the discontinuous one. Lions [52],[53], [54], uses the
continuous approach to solve this
problem. He approximates the exit control problem by a
continuous function. Then he
solves the problem analytically using PDE theory. The
discontinuous approach is more
likely a control problem rather than a PDEs one, where one needs
to apply the techniques
of variational inequalities, relaxed control and weak
convergence. See for examples Barles
and Burdeau [6], Barles and Rouy [7], Barles and Perthame [8],
or Flaming and Soner [34].
The continuous approach discussed by Lions [52],[53], [54]
suggests that one first prove
that the value function satisfies the Dynamic Programming
Principle (DPP), [52]. Then
from DPP, he derives the Hamilton-Jacobi-Bellman equation to
which the value function
is a viscosity solution. When the non-degenerate condition is
assumed on the boundary,
7
-
7/31/2019 Barrier Option
10/53
1.2 Literature review Introduction
one may prove that the value function is the unique continuous
solution to the exit control
problem by using a Strong Comparison Theorem ( Barles and
Burdeau [6], Barles and Rouy
[7]), or one may refer to Users Guide of Crandall, Ishii and
Lions [22]. Once the strong
comparison theorem is established, one can obtain the existence
theorem by the Perrons
method known as Ishii Lemma, see Fleming and Soner [34].
The most recent method to solve this problem uses the notion of
the Lp-viscosity solution.
One reason for using Lp-viscosity solutions is that H does not
need to be continuous in x as
in [22]. It has been shown by Caffarelli, Crandall, Kocan, and
Swiech in [25] that when the
equations are degenerate, uniqueness for viscosity solutions
fails even for the one dimensional
case, see example 2.4 in [25]. However, it has been noted by
Caffarelli et. al [25] that viscositysolutions are Lp-viscosity
solutions whenever H is continuous, see Proposition 2.9 in
[25].
Note that a comprehensive treatment of the Lp-theory of fully
nonlinear parabolic equations
is presented in a recent paper by Crandall, Kocan, and Swiech
[24],[25].
1.2.3 Stochastic control and dominating strategy
The application of the stochastic control theory to financial
markets is relatively new in
applied mathematics. Intensive research in this area has been
initiated by Merton [58].
In his paper, the optimal wealth and the optimal
consumption-rate process are formulated
as a stochastic control model with the logarithmic value
function. Later, Cvitanic and
Karatzas [20] published a paper dealing with the hedging
contingent claim using the theory
of stochastic control. Hedging contingent claims based on the
idea of dominating strategy in
the case of incomplete market, was discussed by Cvitanic and
Karatzas [26], and El-Karoui
and Quenez [32]. The price of a contingent claim obtained by
this method is called the
upper-hedging price or super price. Cvitanic and Karatzas [26]
and El Karoui and Quenez
[32] demonstrate that the upper hedging price, which is a
minimization problem, can be
transformed to a dual maximization problem. Similar
transformation has also been done by
Schmock, Shreve, and Wystup [65], but in a different
problem.
The solution of the BSB equation gives rise to an optimal
dominating strategy for deriva-
tive securities. This result implies that the BSB equation is
the dynamic programmingequation for the following control
problems:
v(t, x) = inf tA()
EQ[
h(St,x,tTt )]
(1.10)
8
-
7/31/2019 Barrier Option
11/53
Introduction 1.3 Probability Spaces and Filtrations
and
v+(t, x) = suptA()
EQ[
h(St,x,tTt )]
. (1.11)
The BSB equation corresponding to the function v+ in (1.11) can
be written in the form
tv+(t, x) +
1
2sup
Tr(D2xv+(t, x)(xt)(xt)
) = 0, t [0, T), x Rd
v+(T, x) = h(x) x Rd
. (1.12)
1.3 Probability Spaces and Filtrations
In this subsection, we will define Brownian motion and the
associated mathematical model
known as the Wiener process. Our discussion closely follows
Durrett [29], and the book
written by Krylov [50], for the basic theory of diffusion
processes. We also refer to Karatzas
and Shreve [48], and Oksendal [60] for an introduction to
stochastic differential equations.
A probability space is a triple (, F,P) where is the space of
elementary events or
outcomes, F is a -algebra of subsets of and P : F [0, 1] is a
probability measure. A
collection of -algebras F = (Ft)t0, satisfying
Fs Ft F
for all s t is called a filtration.
Definition 1.1. A filtration F = {Ft} is said to satisfy the
usual conditions if it is right-
continuous and F0 contains all the P-negligible events in F.
A random variable X is a real-valued function defined on , such
that for every Borel
set B B(R), we have X1(B) = { : X() B} F. Let us recall that the
Borel
-algebra B(R) is the smallest -algebra containing the open sets
ofR. A stochastic process
{Xt; 0 t T} is a family of Rd-valued random variables defined on
(, F,P). The
stochastic process {Xt; 0 t T} is called measurable if, for
every B B(Rd), the set
{(t, ); Xt() B} belongs to the product -algebra B([0, )) F, in
other words, if the
mapping
(t, ) Xt() : ([0, ) , B[0, ]) F) (Rd, B(Rd))
is measurable.
9
-
7/31/2019 Barrier Option
12/53
1.4 Brownian Motion and Wiener Process Introduction
We will denote by FXt = (Xs; s t) the smallest -algebra such
that Xs is FXt -
measurable for all s t. We say that a stochastic process (Xt, 0
t T) is adapted to the
filtration (Ft) if Xt is a Ft-measurable random variable for
each t 0. A stochastic process
(Xt, 0 t T) is called progressively measurable with respect to
the filtration (Ft) if, for
each t 0 and B B(Rd) , the set {(s, ); 0 s t, , Xs() B} belongs
to the
product -algebra B([0, t)) Ft, in other words, if the
mapping
(s, ) Xs() ; ([0, t] , B[0, t]) Ft) (Rd, B(Rd))
is measurable, for each t 0.
Definition 1.2. A random variable X is square integrable
ifEX2
< . A process (Xt, t 0)
is square integrable if supt0 EX2t < . If (Xt, t 0) is
considered on a finite time interval
0 t T, then it is square integrable if sup0tT
EX2t < .
1.4 Brownian Motion and Wiener Process
Brownian motion is one of the most important objects in the
theory of stochastic processes.
It has been applied in many branches of science and engineering.
Recently, it has also been
widely applied in the field of mathematical finance. One may
refer to [50] or [48] for a
construction of Brownian motion. There are many ways to define
the Brownian motion. We
adopt the point of view that Brownian motion is defined on the
space = C([0, ),Rd)
equipped with a Wiener measure P, see Krylov [50] for details.
This version is known as
canonicalBrownian motion. The mathematical formulation of
Brownian motion is known as
the Wiener process2
. The mathematical definition of the Wiener process is given as
follows:
Definition 1.3. An F-adapted process {Wt : 0 t T} defined on a
probability space
(, F,P) is called a Wiener process on [0, T] if it has the
following four properties:
(i) W0 = 0.
(ii) The increments of Wt are independent; that is for any
finite set of times, the random
variable
Wt Ws
is independent of Fs for any s, t such that 0 s t T.
2In honor to N. Wiener who firstly constructed a mathematical
model of Brownian motion
10
-
7/31/2019 Barrier Option
13/53
Introduction 1.5 Martingales
(iii) For any 0 s t T the increment Wt Ws has a Gaussian
distribution with mean
0 and variance t s.
(iv) For all in a set of probability one, Wt() is a continuous
function of t.
1.5 Martingales
The aim of this subsection is to summarize the basic theory of
martingales which is related
to our discussion. Our discussion in this section follows
closely Steele [69]. We also refer to
Musiela M and M. Rutkowski, [59] for theorems which are relevant
to Non-arbitrage pricing.
Definition 1.4. A stochastic process {Xt, t 0} which is adapted
to a filtration F is a
martingale with respect to F = (Ft) if
1. E(|Xt|) < for all 0 t T,
2. E(Xt|Fs) = Xs, a.s. for all 0 s t T.
Definition 1.5. A stochastic process {Xt, t 0}, adapted to a
filtration F is a supermartin-
gale (submartingale) if it is integrable, and for any t and s, 0
s t T,
E(Xt|Fs) ()Xs a.s.
Remark 1.6. If (Xt) is a supermartingale, then (Xt) is a
submartingale.
Remark 1.7. The Wiener process {Wt, 0 t T} is a square
integrable martingale, since
EW2t = t
Definition 1.8. A stochastic process {Xt, t 0} is said to be
uniformly integrable, if[|Xt|a]
|Xt| 0 uniformly in t, as a
Teorema 1.1. (Doobs martingale)
LetY be an integrable random variable, that isE|Y| < , and
define
Mt = E(Y|Ft).
Then Mt is uniformly integrable.
The next result is an obvious consequence of the
Burkholder-Davis-Gundy theorem.
11
-
7/31/2019 Barrier Option
14/53
1.5 Martingales Introduction
Teorema 1.2. Burkholder-Davis-Gundy
For every p 0, there exist two constants cp and Cp such that,
for all continuous local
martingales M vanishing at zero,
cpE[
M, Mp/2]
E [(M)p] CpE
[M, Mp/2
]where Mt = supst |Ms|.
Corollary 1.9. Let
Mt =
tT0
FsdWs.
Then
cpE
T
0
|Ft|2dt
p/2 E sup
tT|Mt|
p CpE
T
0
|Ft|2dt
p/2.
Definition 1.10. A random variable 0 is a stopping time , with
respect to the filtration
F, if the event { t} belongs to the -algebra Ft for every t 0. A
stopping time is an
optional time of the filtration if { < t} Ft for every t
0.
Proposition 1.11. Let X = {Xt, 0 t < } be a progressively
measurable process, and
let be a stopping time of the filtrationF
. Then the random variable X defined on theset { < } F, is
F-measurable, and the stopped process {Xt, Ft, 0 t < } is
progressively measurable.
The proof of Proposition 1.11 is given in Karatzas and Shreve
[48] page 9.
Teorema 1.3. Optional Sampling Theorem
Let (Xt) be a martingale and a stopping time. Then the stopped
process (Xt) is a
martingale. In particular, for any t, EXt = EX0.
Definition 1.12. An adapted process (Xt) is called a local
martingale if there exists a
sequence of stopping times n, such that n as n and for each n,
(Xtn) is a
uniformly integrable martingale.
Definition 1.13. Quadratic Variation of Martingales
Let n = maxi
(tni+1 tni ) as n . The Quadratic variation of a process (Xt)
is
defined as a limit in probability
Xt = lim
ni=1
(Xtni
Xtni1
)2. (1.13)
12
-
7/31/2019 Barrier Option
15/53
Introduction 1.5 Martingales
If (Xt) is a martingale, then (X2t ) is a submartingale. By
compensating X
2t by an
increasing process, it is possible to make it into a martingale.
The process which compensates
X2t to form a martingale turns out to be the quadratic variation
of process Xt.
Teorema 1.4. If (Xt) is a local martingale, then X, Xt exists.
Moreover X2t X, Xt is
a local martingale.
13
-
7/31/2019 Barrier Option
16/53
1.5 Martingales Introduction
14
-
7/31/2019 Barrier Option
17/53
Chapter 2
Single-asset Barrier Option
In this chapter we discuss the single asset case, which is
another important result of this
thesis. My result here is original and it might be one of some
contributions of this thesis.
2.1 Pricing and Hedging
Let us consider a very common example of barrier option, that is
the knock out and up call
of the European type. If 0 t T, St = x and the call has not
knocked out prior to time
t, then the price process for this option is given by an adapted
process, {vt; 0 t T},
satisfying
vT = (ST K)1{>T}.
Here K is the strike price of the option and is the first moment
of time when the process
St hits the barrier H, defined by
= inf{t 0; St H}. (2.1)
Assuming that P is already the risk neutral measure and 0 < K
< H , the value of the
knock-out barrier option at time t with initial stock price x is
given by
J(t, x; ) = E
[(St,x,Tt K)
+1{>(Tt)}
], 0 t T. (2.2)
For a constant volatility, t = , the explicit solution of (2.2)
can be derived by the method
of reflection principle of Brownian motion, Rich [62]. One may
refer to Rich [62] for the
closed form solution of (2.2).
15
-
7/31/2019 Barrier Option
18/53
2.1 Pricing and Hedging Single-asset Barrier Option
As is shown in the previous chapter, Theorem 3.1, (2.2) is also
the solution of partial
differential equation
tv(t, x) +
1
22x2
2
x2v(t, x) = 0, 0 t < T, 0 x < H (2.3)
with terminal and boundary conditions
v(T, x) = (x K)+, 0 x < H (2.4)
v(t, x) = 0, x H, 0 t T. (2.5)
Now assume that the true volatility is limited to move in a
certain interval, i.e.
t I = [min, max].
The assumption that (t) is adapted to F makes it functional of
the Brownian paths {Wt, 0
t T}, so that it is dependent on the past of the Brownian motion
or stock price. This
volatility can be interpreted as a control to find the worst and
the best case price of the
barrier option. Since the seller does not know the true
volatility, he will estimate the fair
price of the claim within an interval of prices, which is known
as the interval of admissible
prices. Therefore, we expect that the price of the claim lies in
the interval
v(t, St,x,t ) vt v
+(t, St,x,t ), (2.6)
where
v(t, St,x,t ) = infI
E[
(St,x,Tt K)+1{>(Tt)}
](2.7)
and
v+(t, St,x,t ) = supI
E
[(St,x,Tt K)
+1{>(Tt)}
]. (2.8)
As already discussed in the previous chapter, in order to have
superstrategy, we fix the price
vt of the option and the quantities t of the risky asset St in
the hedging portfolio Xx,,vt as
vt = v(t, St,x,t ), t =
xv(t, St,x,t ), 0 t T (2.9)
where v is the solution of the HJB equation
tv(t, x) +
1
2supI
2t x2
2
x2v(t, x) = 0, 0 t < T, 0 x < H (2.10)
with terminal and boundary conditions
v(T, x) = (x K)+, 0 x < H (2.11)
v(t, x) = 0, x H, 0 t T. (2.12)
16
-
7/31/2019 Barrier Option
19/53
Single-asset Barrier Option 2.1 Pricing and Hedging
Therefore, the portfolio process satisfies
d(Xx,,vt ) = tSt,x,t dWt.
Initially, at t = 0, takeXx,,v0 = v(0, S0).
Then
Xx,,vT = v( T, St,x,T )
with terminal and boundary conditions
v(T, x) = (x K)+, if > T (2.13)
v(t, H) = 0, if T. (2.14)
Remark 2.1. In Theorem ??, we have shown that in order to have
delta hedging admissible,
we have to impose the condition
E
T0
2t dt < .
Moreover, in the case when
t =
x
v(t, St,x,t ), 0 t T,
then Xx,,vt is a supermartingale.
Proposition 2.2. Suppose that v is a solution of (2.10)-(2.12)
for any convex payoff function.
Then v is not convex or concave in x for any t > 0.
Proof. We prove by contradiction. Suppose that v is convex or
concave for all t and x. Note
that v is positive for x < H and v approaches zero when x H
and x 0 for every fixed
time t. Therefore, it must be concave. However, ift approaches
T, v(T, x) = h(x) which is
a convex function. This produces a contradiction.
Teorema 2.1. Letv be a solution of the HJB equation (2.10) with
terminal condition (2.11)
and boundary condition (2.12), and define
t(x) =
max if2
x2v(t, x) > 0
min if2
x2v(t, x) < 0.
(2.15)
Then t is an optimal bang-bang control, v is the superprice and
is the superstrategy.
17
-
7/31/2019 Barrier Option
20/53
2.2 Practical Issues Single-asset Barrier Option
Proof. Since v is a unique solution of the HJB equation
(2.10)-(2.12), then v is the optimal
price; see Chapter 4. Then, clearly t is an optimal control,
because HJB is computed with
supremum.
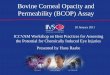
2.2 Practical Issues
The contingent claim h(x) = (x K)+1{>T} is discontinuous at
the barrier H. This results
in an unbounded delta hedging at the maturity of the barrier
option. The large delta hedging
may cause instability in the hedging strategy (See figure 2.1).
The delta hedging becomes
14 15 16 17 18 19 20 21 22 23 24 25 260
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Stock Price (S)
O
ptionPricev(t,S
)
Call and Up Barrier Option
3 weeks to maturity
2 weeks to maturity
1 week to maturity
Figure 2.1: The barrier option price given by (2.10)- (2.12)
with K=20, H=23, = 0.20
very negative near the barrier, t =x
v(t, x) as t T.
If our portfolio consists of a non-risky asset invested in a
money market and risky assets
in a stock, then in the case where the stock price does not
cross the barrier, the seller covers
this short position with funds shares in the stock. If the stock
price hits the barrier and the
option is knocked out, the hedging strategy is in the region
where t is large and negative.
In this case, the seller covers his short position with the
money market.
To avoid the large delta being taken, one can put a constraint
on the hedging portfolio
and then use this constraint to bound the super-replication
strategy. This approach has been
18
-
7/31/2019 Barrier Option
21/53
Single-asset Barrier Option 2.3 Numerical simulation
suggested by Schmock, Shreve, and Wystup [65]. They impose
constraints on the delta and
show that the cheapest super-replicating claim that satisfies
this constraint can be found as
the solution of a dual problem of a stochastic control problem.
Another method to avoid
instability in the hedging strategy is proposed by Shreve [68],
Chap.20, p.218. He imposes
the boundary condition
v(t, x) + H
xv(t, x) = 0, x H, 0 t T,
instead of
v(t, H) = 0 x H, 0 t T
where is a tolerance parameter. This approach guarantees that
the Ht remains bounded
and the value of the portfolio is always sufficient to cover a
hedging error within Ht of
the short position.
2.3 Numerical simulation
In this subsection, we consider a numerical example which
illustrates the previous discussion.
In particular, we generate a Call and Up barrier option of
European type with strike price
K =$20 and barrier H =$23. Since the true volatility is not
known, we expect the volatility
to be moving within interval [min, max] = [0.10, 0.20] and
option expiration at T = 0.25
year. Then we use the HJB equation (2.10)- (2.12) to calculate
the superprice. We also
assume that we initially can buy or sell the option at the mid
volatility, (max + min)/2.
Here we report in Figure 2.2 the subprice and superprice barrier
option computed using
explicit schemes (the algorithm is given in the next
chapter).
Figure 2.2 illustrates a comparison between the extreme prices
that are obtained by
pricing with a constant volatility, linear PDEs and those
obtained from the BSB equation.
Since the extreme prices for options are obtained by using the
two extreme volatilities, one
might believe that the extreme price for the portfolios would be
given by the Black-Scholes
prices with some constant volatility in the range min max. As
shown in Figure
2.2, the theoretical price calculated by the Black-Scholes
formula is too low to enter into
a delta-hedging strategy that protects against the worst case
situation. The superhedging
strategy obtained from the BSB equation would protect the hedger
against the movement
of the volatilities within the band.
19
-
7/31/2019 Barrier Option
22/53
2.3 Numerical simulation Single-asset Barrier Option
14 16 18 20 22 24 260
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Stock Price (S)
OptionPricev(t,S
)
Call and Up Barrier Option
20%
18%
12%
10%
Superprice
Subprice
Figure 2.2: The dotted lines represent the superprice and
subprice of the barrier option computed by
(2.10)- (2.12) and the solid lines represent the extreme value
of the option computed by the linear equation
(2.3)-(2.5).
The following figure shows superstrategy with 1-3 months to
maturity, computed using
equation (2.9). It shows how delta of the portfolio
superstrategy varies as the option gets
closer to maturity.
20
-
7/31/2019 Barrier Option
23/53
Single-asset Barrier Option 2.3 Numerical simulation
15 16 17 18 19 20 21 22 231
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
Stock Price (S)
S
uperstrategy,
Delta
Call and Up Barrier Option
1 month to maturity
3 months to maturity
2 months to maturity
Figure 2.3: Delta superstrategy computed from the superprice
given in figure 2.2
21
-
7/31/2019 Barrier Option
24/53
2.3 Numerical simulation Single-asset Barrier Option
22
-
7/31/2019 Barrier Option
25/53
Chapter 3
Multi-asset Barrier Options
3.1 Pricing
Based on the position of the barrier, we categorize the
multi-asset barrier options into three
different types. The first one is the external barrier option.
The value of the option depends
on the value of another asset. If the tradeable stock hits a
certain level of barrier then the
value of such an option is zero. The second one is the basket
barrier option. The value
of this option depends on whether the underlying assets in the
basket hit a certain level of
barrier or not. The third one termed the max/min barrier option
is a barrier option where
the value of the option depends on whether the maximum of the
underlying assets hits a
certain level of barrier or not. To begin with let us define a
price process for the multi-asset
barrier option.
Definition 3.1. A price process for a barrier option is any
adapted process {vt; 0 t T}
satisfying
vT = h(St,x,tT )1{>T}, a.s.
where h : Rd+ [0, ) is a given function and is the first moment
of time when St hits
the barrier, defined as
= inf{t > 0; St O}. (3.1)
Here St is the solution of (??), O Rd+1
and O is the boundary of O
As an illustration, we firstly, discuss the class of multi-asset
barrier options whose prices
depend on an external barrier variable.
23
-
7/31/2019 Barrier Option
26/53
3.1 Pricing Multi-asset Barrier Options
The external barrier determines whether the option is knocked
out when the stock price
breaches the prespecified level, or stays alive until the expiry
time T. The valuation of
multi-asset barrier options with a single-sided external barrier
has been discussed in several
papers, for example in Heynen and Kat [42], who have presented
analytic valuation formulae
for European-style barrier options with a single barrier. A
similar problem, but with the
external barrier following an exponential function, has also
been discussed by Kwok, Wu,
and Yu [51]. They employ the method of images to find the Green
function of the governing
differential equation. In this subsection, we follow closely the
discussion by Wong and Kwok
[73], but we are not interested in the analytic valuation of the
option as discussed in this
working paper.We propose here a payoff function for a
multi-asset barrier option with an external barrier
in which the terminal payoff is characterized by
h(ST) = (max(S2T, , S
dT) K)
+1{>T}.
We adopt the usual Black-Scholes assumptions on the capital
market and we assume that
the volatilities are fixed. In the risk-neutral assumption, the
stock price Sit, i = 1, , d
follow the lognormal diffusion processes. Let ij denote the
correlation coefficients between
dWi and dWj which are constant. We define
xi =1
iln
SitSi
and i = i/2, i = 1, 2, , d.
Let H denote the upper barrier. The call option will be knocked
out when S1t H at any
time before expiry time T. We define
H =1
1ln
H
S1.
The value of the multi-asset barrier option with barrier level H
is given by
v(t, x) = E[
h(Sx,Tt)1{>(Tt)}]
=
H0
Dd1
(x,T, )(max(S2Te2x2 , , SdTe
dxd) K)+dxd, , dx1
0 t T. (3.2)
Here Dd1 is the domain in the (d 1)-dimensional (x1, , xd) -
plane in which
max(S2Te2x2, , SdTe
dxd) > K is attained. Let Dd1i denote the domain in which
SiTe
ixi
24
-
7/31/2019 Barrier Option
27/53
Multi-asset Barrier Options 3.1 Pricing
is the maximum of the (d 1) -quantities S2e2x2, , Sde
dxd. Then Dd1i is given by
Dd1i =
{(x2, , xd) : xi
1
iln
K
Si
xi
j
i xj 1i ln S
i
Sj , j = 2, , d , j = i}
, i = 2, , d.
Following Wong and Kwok [73], (x,T, ) is the fundamental
solution to the d-dimensional
Fokker-Plank equation
t=
1
2
di=1
dj=1
ij
xixj
dj=1
j
xj,
x1 < H, < xj < , j = 2, , d, t > 0. (3.3)
This formulation gives rise to the analytical evaluation of the
expectation integral in many
dimensions. This is beyond our discussion. Instead we convert
the problem into the partial
differential equation given by the following theorem.
Teorema 3.1. Suppose that v is a solution of the partial
differential equation
tv(t, St) +
1
2tr(D2xv(t, St)(St)(St)
) = 0, 0 t T, S1t H, (3.4)
with terminal and boundary conditions
v(T, S1T) = h(S1T), S
1t < H, 0 t T (3.5)
v(t, S1t ) = 0, S1t H, 0 t T. (3.6)
Then v is given by (3.2).
Proof. The proof is standard in terms of its application to the
exit control problems. How-
ever, we here is dealing with its application to the pricing of
barrier option. So, in view of its
application to the financial problem, the proof is original. To
simplify notation, we denote
the operator
L =1
2tr[( )D2xv(t, St)].
By the Markov property, the stochastic process er(T)v( T, ST) is
a martingale under
Q. Without loss of generality, take r = 0, by applying Itos
formula to (3.2) then integrating
from t to T, we have
v( T, ST) = v(t, St) +
Tt
tv(r, Sr) + Lv(r, Sr)
dr
+
Tt
xv(r, Sr)(Sr)
dWr (3.7)
25
-
7/31/2019 Barrier Option
28/53
3.2 Hedging Multi-asset Barrier Options
Since v(T, ST) and the last term of (3.7) is also a martingale,
then the Reimann integralTt
tv(r, Sr)) + Lv(r, Sr)(St)
dWr
dr (3.8)
is also a martingale. Therefore
tv(r, Sr) + Lv(r, Sr) = 0, 0 r T, S
1r < H, (3.9)
which also satisfy the Black-Scholes equation with final and
boundary conditions (3.5)-
(3.6).
3.2 Hedging
The barrier option sellers objective is to find a strategy, i.e.
an amount , which enables
him to make a good commitment to hedge the contingent claim h(x)
at time t = T. He is
expecting that his starting wealth, x will increase such that he
can cover his obligation
Xx,T h(Sx,T )1{>T} a.s.
where Xx,T is the solution of the linear stochastic differential
equation
dXx,t =n
i=0
itdSit , t T. (3.10)
which is
Xx,t = x +
t0
ni=1
iudSiu, 0 t T. (3.11)
In other words, given a contingent claim h(S
x,
T )1{>T}, we consider the smallest price thatthe seller can
accept from the buyer at the initial contract which will enable the
seller to
cover his obligation at the final contract T without any risk,
in the sense of (3.11). This is
denoted by
v+(t, x) = inf
x 0 | such that Xx,T h(Sx,Tt)1{>(Tt)}; P a.e.
; (3.12)
This price v is the smallest amount such that Xx,T
super-replicates h(Sx,T )1{T}. Any such
satisfying the above condition (3.12) is also called a
superstrategy or a superprice.
The buyers objective is to find a portfolio strategy so that the
payment that he receives
at time T makes it possible for him to cover the debt he
incurred at time t = 0. The largest
26
-
7/31/2019 Barrier Option
29/53
Multi-asset Barrier Options 3.3 The replicating strategy
amount x 0 that enables the buyer to achieve this is called the
subhedging price for the
contingent claim h(Sx,T )1{>T}, and denoted by
v
(t, x) = sup
x 0 | such that X
x,
T h(S
x,
Tt)1{>(Tt)};P
a.e.
. (3.13)
The price v(t, x) is the largest amount that the buyer can
afford to pay at initial contract,
which guarantees that this amount can cover the debt at final
contract without any risk.
Any such satisfying the above condition (3.13) is also called a
substrategy or a subprice.
In order to ensure that the portfolio is self-financed, we
should set Xx,t = v(t, Sx,t ) for
all t [0, T]. Then by Itos formula, we have
dXt = Xt,dWr + t
v(t, Sx,t ) + Lv(t, Sx,t ). (3.14)
We also know, from the definition of the self-financing value of
the portfolio , that
dXx,t =d
i=1
itdSit .
This gives
ir =
xiv(r, St,x,), 0 r T, i = 0, , d;
then
Xx,T = v( T, Sx,T) (3.15)
subject to
v(T, S) = h(Sx,T ) if x O
v(t, x) = 0 if x / O.
(3.16)
3.3 The replicating strategy
We assume that the volatilities are stochastic, but restricted
to move within an admissible
set A(). In the real situation the agent does not know the true
volatilities, instead he uses
another model, that is,
dSit = Sit
nj=1
ijt dWjt , i = 1, , d (3.17)
to hedge the contingent claim, where A() is a certain admissible
volatility, Sit = xi is
the initial condition and x = (xi) is a vector in Rd. These
volatilities can be interpreted as a
control to find the worst or best case price of the multi-asset
barrier option. In this model,
there are two sources of uncertainty, that is Wt and the
volatility . Since the agent does
27
-
7/31/2019 Barrier Option
30/53
3.3 The replicating strategy Multi-asset Barrier Options
not know these two objects, he will estimate the fair price of
the claim within the interval
price, which is known as the interval of admissible prices. The
arbitrage free price of the
barrier option is given by
vt = EQ[
h(St,x,Tt )1{>(Tt)}]
. (3.18)
Since we do not know yet whether our contingent claim is
attainable or not. Therefore, we
expect that the arbitrage free price of the claim lies in the
interval
v(t, x) vt v+(t, x), 0 t T, (3.19)
where
v+(t, x) = supA()
E[
h(St,x,Tt )1{>(Tt)}
](3.20)
and
v(t, x) = inf A()
E[
h(St,x,Tt )1{>(Tt)}]
. (3.21)
Now we adopt the definition of a replicating strategy for
unspecified volatilities given in
Touzi [70], Karatzas [47], or Frey [37].
Definition 3.2. A super-replicating price for a contingent claim
h at time t is given by
v(t, x) = inf {x 0 | A() admissible, such that
Xt,x,T h(St,x,Tt )1{>(Tt)};P a.e.,
. (3.22)
This is the minimum price that the agent can accept in order to
super-replicate the claim.
If the set is empty, then is zero. Any such process , which may
depend on , is called a
super-replicating strategy or superstrategy.
Definition 3.3. A sub-replicating price for the contingent claim
h at time t is given by
v(t, x) = sup {x 0 | A() admissible, such that
Xt,x,T h(St,x,Tt )1{>(Tt)};P a.e.,
. (3.23)
Any such process , which may depend on , is called a
sub-replicating strategy or sub-
strategy.
Remark 3.4. Another version of super-replicating and
sub-replicating strategy is also given
by El-Kouri et al. [33] or Romagnoli and Vargiolu [63]. If v = v
= vt, then vt is the arbitrage
free price of the contingent claim h.
28
-
7/31/2019 Barrier Option
31/53
Multi-asset Barrier Options 3.3 The replicating strategy
Teorema 3.2. The process
Xt,x,t Xt = supA()
E
[h(St,x,Tt )1{>(Tt)}
](3.24)
is a supermartingale
Proof. The portfolio is self-financing, and Xt is bounded from
below, hence by Theorem 3.5
in Krylov [49], p.149, Xt is a supermartingale.
As we noticed in Definition 3.2 the super/substrategy depends on
the choice of volatility
process (t). This choice can create arbitrage opportunities.
Therefore, v+t (respectively v
t )
may be considered as a stochastic control problem where the
lower bound and the upper
bound of its solution can be interpreted as a sub arbitrage
price and super arbitrage
price, respectively. Before we convert our problem into a
stochastic control problem in the
HJB equation, the following theorem gives an idea that with a
superstrategy, one can have
Xt,x,T h(St,x,Tt )1{>(Tt)}. This means the portfolio
overhedges the contingent claim.
Teorema 3.3. Letv be a price process for a contingent claim and
let be a portfolio process.
If v is the super-hedging price as defined by Definition 3.2,
then there exists a pair (v, )
such that
v(t, x) = v(t, x) = supA()
E[
h(St,x,Tt )1{>(Tt)}]
.
In particular,
v(T, x) h(St,x,Tt ) a.s. (3.25)
Proof. The following proof is original. This might be a
significant contribution of the thesis
in hedging barrier option. Take a superstrategy associated with
an upper hedging price
as defined in Definition 3.2. Then
Xx,,vT E(St,x,Tt )1{>(Tt)}
for every admissible control , but by Proposition 4.4.2 in
Krylov [49], Xx,T is a super-
martingale. This implies that
v(t, x) = Xx,t E
Xt,x,T |Ft
E
[h(St,x,Tt )1{>(Tt)}
] admissible . (3.26)
Hence, v(t, x) v(t, x).
29
-
7/31/2019 Barrier Option
32/53
3.3 The replicating strategy Multi-asset Barrier Options
To prove that v(t, x) v(t, x), we apply Itos formula to the
process Sx,T, giving
v( T, Sx,T) = v(t, x) +
Tt
tv(r, St,x,r ) + Lv(t,r,S
x,r )
dr
+
T
t
x x
v(r, St,x,r )dWr. (3.27)
Taking expectation of both sides, we have
Eh(St,x,T )1{>T} = v(t, x) + E
Tt
rv(r, Sx,r ) + Lv(r, S
x,r )
dr. (3.28)
Now we take the supremum of both sides, giving
v(t, x) v(t, x) + supA()
E
T
t
rv(r, Sr) + Lv(r, S
x,r )
dr. (3.29)
Since the expectation in (3.29) is zero, we have
v(t, x) v(t, x). (3.30)
Therefore,
v(t, x) = v(t, x) = supA()
E[
(St,x,Tt )1{>(Tt)}]
.
Before we discuss the more specific example of the multi-asset
barrier option, let us write
the HJB equation (??)-(??) in sense of multi-asset barrier
option version
Teorema 3.4.
tv(t, St) +
1
2sup
Tr(D2xv(t, Sx,t )(x)(x)
) = 0, t [0, T), x Rd
v(T, x) = h(x) x Rd
v(t, x) = 0, x O
(3.31)
This equation is also known as the Black-Scholes-Barenblatt
(BSB) equation. To give a
better idea about this problem, in the following section we
discuss two-asset barrier option.
30
-
7/31/2019 Barrier Option
33/53
Multi-asset Barrier Options 3.4 Two-asset barrier option
3.4 Two-asset barrier option
In standard European options, there are several types of payoff
functions of two-asset barrier
options. For examples:
1. Max/min of two-asset barrier option:
h(T, S1T, S2T) = (max(S
1T, S
2T) K)
+1{>T},
where
= {t 0, max(S1t , S2t ) H}.
2. Basket barrier option :
h(T, S1T, S2T) = (aS
1T + (1 a)S
2T K)
+1{>T},
where a is a portion of asset S1 and
= {t 0, max(S1t , S2t ) H}.
3. External barrier option :
h(T, S1T, S2T) = (S1T K)+1{>T},
where
= {t 0, S2t H}.
We choose the max/min of two-asset barrier option as an example.
Let the prices of the
stocks at time t be S1t and S2t . The risk neutral price
processes for the two assets S
1t and S
2t
follow the stochastic differential equations
dS1t = 1t S
1t dW
1t (3.32)
dS2t = 2t S
2t dW
2t (3.33)
S10 = x1, S20 = x2. (3.34)
Let denote the correlation coefficient of the Brownian motion
dW1t and dW2t . Assume that
the interest rate is zero. We can write the dynamics of the two
assets in a more compact
vectorial notation:
d
S
1t
S2t
=
S
1t 0
0 S2t
(
1t )
2 1t 2t
1t 2t (
2t )
2
d
W
1t
W2t
(3.35)
31
-
7/31/2019 Barrier Option
34/53
-
7/31/2019 Barrier Option
35/53
Multi-asset Barrier Options 3.5 Optimization problem
Hence we have
At,x = x D2xv x =
x212v
x21x1x2
2v
x1x2
x1x22v
x1x2x22
2v
x22
.
Now we assume that the true volatilities are not known and
limited to move in a certain
interval. We write the set of admissible volatilities as
follows:
=
R
22
=
1t 1t
2t 2t
, 1 1t +1 , 2 2t +2 , +
.
Then we have
=
(1t )2 1t
2t
1t 2t (
2t )
2
.
Let At,x = A be
A =
a b
b c
.
Then the corresponding Hamilton-Jacobi-Bellman equation can be
written as:
v
t+
1
2max
A()tr(A) = 0, (3.43)
with terminal and boundary condition
v(T, x1, x2) = (min(x1, x2) K)+, 0 max(x1, x2) < H (3.44)
v(t, S1T, S2T) = 0, , max(x1, x2) H, 0 t T. (3.45)
3.5 Optimization problem
In this subsection we discuss the optimization problem appearing
in the HJB equation (3.43).
First, we write the function to be maximized as follows:
f(1, 2, ) = tr(A) = a21 + 2b12 + c
22, (3.46)
33
-
7/31/2019 Barrier Option
36/53
3.5 Optimization problem Multi-asset Barrier Options
where 1 1t
+1 ,
2
2t
+2 ,
+. The standard form is given by
QP1
minimize f(1, 2, )
subject to 1 1t +1 ,
2 2t
+2 ,
+.
(3.47)
We present the variables as a vector x and its lower bound and
upper bound as l and u,
respectively:
l =
1
2
and u =
+
1
+2
+
. (3.48)
The problem QP1 is a special form of bound constraint of the
optimization problem. This
form leads to considerable simplification of the optimality
conditions. The Lagrange mul-
tiplier for an active bound on xi, = 1, , 3 is given by gi(x) if
xi = li, and by gi(x
) if
xi = ui ( since the constraint xi ui can be written as xi ui).
Then the sufficient
condition for x to be a local minimizer off subject to bound
(3.48) is given by the following
theorem.
Teorema 3.5. First order sufficient conditions for
optimality(Gill, Murray, and
Wright [38])
If x is feasible for QP1 and there exists x such that x
satisfies the following conditions
1. l x u
2. x = l if f(x) > 0
3. gL > 0 and gU < 0
then x is a local minimizer of f.
34
-
7/31/2019 Barrier Option
37/53
Chapter 4
Numerical solutions
The following algorithm for solving the HJB equation is
original. Our result here is a
significant contribution of the thesis.
4.1 Introduction
In Chapter 4, we have shown that the stochastic exit control
problem for pricing barrier
options with unspecified volatilities can be converted into the
nonlinear PDE (HJB equation).
We have also shown that the nonlinear PDE of the stochastic exit
control problems converges
to the viscosity solutions (see Crandall et al. [22]). Barles
[5] gives a detailed discussion about
stability, consistence, and convergence to the viscosity
solution.
One may refer to [75] for the implicit method or the
Crank-Nicolson method, used to
solve linear PDEs for barrier options. Boyle [16], also
developed an explicit finite difference
method for pricing barrier options based on a lattice or
trinomial approach. The linear PDE
for pricing barrier options has been discussed in Zvan et al.
[75], [76]. For the nonlinear PDE,
one may refer to Pooley, Forsyth and Vetzal [61]. The authors
use the implicit discretization
method to find the best and the worst price of the uncertain
volatility. They also demonstrate
the numerical convergence properties of the nonlinear PDE in the
case of a single asset.
In this chapter, we focus on computational and implementation
issues of the finite dif-
ference methods for solving the HJB equation. We not only
discuss the single asset case but
also the two-asset-case. We also present here the algorithm of
how to solve the HJB equation
in two-asset case. In the algorithm, we demonstrate how we can
make use MATLAB func-
tion, FMINCON, to find the optimal price. In this discussion we
are not interested in the
35
-
7/31/2019 Barrier Option
38/53
4.2 Numerical Scheme and algorithm Numerical solutions
efficiency or the accuracy of the approximation. Such a problem
is beyond our discussion.
One may refer to Pooley, Forsyth and Vetzal [61] or [75] for the
efficiency or the accuracy
for the implicit method or the Crank-Nicolson method
4.2 Numerical Scheme and algorithm
4.2.1 Single-asset case
In the case of a single-asset, we use explicit schemes to
approximate the HJB equation.
The reason for choosing these schemes is that we want to
demonstrate the condition under
which the approximation converges to the closed form solution.
Other schemes, such as the
implicit and Crank-Nicolson schemes, are unconditionally stable.
Now we rewrite again the
HJB equation:
rv(r, Sr) + sup
minmax
1
22S2r
2
S2v(r, Sr) = 0, r < T, Smin Sr Smax (4.1)
with terminal condition
v(T, ST) = (ST K)+ Sr < H, 0 r T (4.2)
and boundary condition
v(r, Sr) = 0 Sr H, 0 r T. (4.3)
To discuss the discretization of (4.1), we firstly introduce the
new variables x and t defined
by
x = log(S/K), t = T /1
22, S = Kex+u(, x).
Then (4.1) can be written as
u
=
2u
x2, xmin < x < xmax, 0 < H. (4.7)
Here
u(, x) = 1Ke1
2 (k1)x+1
4 (k+1)2
v(, S), 0 < < 122T
and k = r/0.52, xmin = log(Smin/K), xmax = log(Smax/K). The
choice of volatility
depends on the sign of the2v
x2. To discuss the discretization, we divide the x axis into
equally spaced nodes with interval length x and the t time axis
into equally spaced nodes
with interval t. Now we choose positive integers N and M as the
number of intervals in
the x axis and = t axis, respectively. We define grid points
along the space and time axes,
xi = xmin + ix for i = 1, N,
tj = jt for j = 1, , M,
37
-
7/31/2019 Barrier Option
40/53
4.2 Numerical Scheme and algorithm Numerical solutions
where x = (xmax xmin)/N, t =12
2T /M. We denote the midpoint of the j-th time
interval by
tj 12
=1
2(tj1 + tj) = (j
1
2)t
and we write
U1
2
i =1
2(Uji + U
j1i ) = u(xi, tj 1
2
).
Now we approximateu
tby
u
t
u(tj, xi) u(tj t, xi)
t=
Uji Uj1i
t(4.8)
and approximate2u
x2
by
2u
x2
u(tj 12
, xi + x) 2u(tj 12
, xi) + u(t1 12
, xi x)
t
U
j 12
i+1 2Uj 1
2
i + Uj 1
2
i1
(x)2.
We can write (4.4) in general form as follows
vji vj1i
t=
vji+1 2vji + v
ji1
(x)2, (4.9)
where [0, 1] is a temporal weighting factor determining the type
of scheme being used:
fully implicit when = 1, Crank-Nicolson when = 12
and fully explicit when = 0. Now
consider the case when = 0, that is explicit scheme.
Because the scheme is explicit, it is stable under some
condition. The stability depends
on the step lengths t and x. From (4.9), we have
vji =
1
t
(x)2
vji +
1
2
t
(x)2
(
vj+1i+1 + vj+1i1
). (4.10)
In order to prevent any oscillation, the following condition
must be satisfied
(1 t
(x)2) 0 (4.11)
The PDE is solved using an explicit scheme which is
conditionally convergent. Based on
this scheme, we propose the following algorithm for a numerical
solution of (4.1) and (4.2):
(j+1)2 =
2
max if
j+1
0
2min if j+1 0
(4.12)
38
-
7/31/2019 Barrier Option
41/53
Numerical solutions 4.2 Numerical Scheme and algorithm
where
=
vj+1i+1 2v
j+1i + v
j+1i1
(x)2
for i = 1, , M and j = 1, , N.
Algorithm :
Initialize {vj0}N1j=0 using the initial and boundary conditions
(4.5).
For i = 0 to M 1 do
v0i = 0
For j = 1 to N 2 do
gradj+1i = vj+2i1 2v
j+1i1 + v
ji1
Ifgradj+1i 0
= min
= 0.52t/x2
Else
= max
= 0.52t/x2
endif
vj+1i = (1 2)vj+1i1 + v
j+2i1 + v
ji1
For k = h to N 1 do
vki = 0
end do j
end do i
Here h is the point at which the scheme hits the barrier.
In the algorithm above, the barrier is assumed to be observed
continuously. In other
words, the barrier is checked at every time during the life of
the option. In practice, the
barrier is often observed at discrete-time intervals such as
daily or weekly. The algorithm
above can easily be adjusted to compute prices and to hedge the
discrete-time barrier option.
Moreover, it also can be used to handle double discrete barrier
options.
39
-
7/31/2019 Barrier Option
42/53
4.2 Numerical Scheme and algorithm Numerical solutions
4.2.2 Two-asset case
Consider the HJB equation:
v
s + maxA()1
2 21S21
2v
S21+
1
222S22
2v
S22+ 12S1S2
2v
S1S2
= 0,
Smin S1, S2 Smax, (4.13)
with initial conditions
v(s, Smin, S2) = 0 (4.14)
v(s, S1, Smin) = 0; (4.15)
terminal condition
v(T, S1, S2) = (max(ST1 , S
T2 ) K)
+, (4.16)
and the boundary condition
v(s, St1, St2) = 0., max(S
t1, S
t2) H. (4.17)
Here () is a two-dimensional matrix such that A(). To simplify
computation we
convert the HJB equation (4.13) into a dimensionless form. We
consider the following changeof variables
S1 = Kex,
S2 = Key,
s = T t
12
12,
v = Ku(x,y,s).
Then the first derivative of v with respect to time t and price
S is given by
v
s=
1
212K
u
t(4.18)
2v
S21=
S1
K
S1
u
S1
=
K
S21
u
x+
K
S21
2u
x2(4.19)
2v
S22=
S2
K
S2
u
S2
=
K
S22
u
y+
K
S22
2u
y2(4.20)
2v
S1S2=
S1K
S2
u
S2 = K
S1S2
2u
xy(4.21)
By substituting these into (4.13), then the problem can be
formulated as follows;
v(s, S1, S2) = Ku(t,x,y) (4.22)
40
-
7/31/2019 Barrier Option
43/53
Numerical solutions 4.2 Numerical Scheme and algorithm
where u is the solution of following dynamic programming
equation
u
t= max
A()
12
2u
x2+
21
2u
y2+ 2
2u
xy
(4.23)
with initial conditions
u(t, xmin, y) = 0 (4.24)
u(t,x,ymin) = 0, (4.25)
terminal condition
u(T, x , y) = (max(ex, ey) 1)+, (4.26)
and the boundary condition
u(t,x,y) = 0, max(St1, St2) H. (4.27)
Here xmax = ymax = log(Smax/K) andxmin = ymin = log(Smin/K).
In finite difference mesh, we divide the x and y axes into J
equally spaced nodes with
interval x and y, and the t axis into N equally spaced nodes
with interval t. We define
grid points along the space and time axis as follows;
t =1
212T/J,
tj = jt for 0 j J,
xm = mx for N m N+,
yn = nx for N n N+,
where x = (xmax xmin)/N = (ymax ymin)/N, and N and N+ are
positive integer with
N+ N = N. Now we introduce grid function
Ujm,n u(xm, yn, tj)
u0m,n u0(xm, yn)
tj = (tj1 + tj) = (j )t
Now we approximateu
tby
u
t
u(xm, yn, tj) u(xm, ym, tj t)
t
Ujmn Uj1mn
t, (4.28)
41
-
7/31/2019 Barrier Option
44/53
4.2 Numerical Scheme and algorithm Numerical solutions
and approximate2u
x2,2u
y2and
2u
xyby second central difference, we have
2u
x2
u(xm + x, yn, tj) 2u(xm, yn, tj) + u(xm x, yn, t1)
(x)2
Uim+1,n 2U
jm,n + U
jm1,n
(x)2.
2u
y2
u(xm, yn + y, tj) 2u(xm, yn, tj) + u(xm, yn y, t1)
(y)2
Uim,n+1 2U
jm,n + U
jm,n1
(y)2.
2u
xy
1
2x
u(xm + x, yn + y, tj) u(xm x, yn + y, tj)
2x
u(xm + x, yn y, tj) u(xm x, yn y, tj)2x
Uim+1,n+1 Ujm1,n+1U
jm+1,n1 + U
jm1,n1
(2x)2.
Substituting these into (4.23), we obtain
Ujmn Uj1mn
t= max
A()
12
Uim+1,n 2Ujm,n + U
jm1,n
(x)221
Uim+1,n 2Ujm,n + U
jm1,n
(x)2
2U
i
m+1,n+1 U
j
m1,n+1U
j
m+1,n1 + U
j
m1,n1(2x)2
for N + 1 m, n N+ 1 a n d 1 j J,
with U0m,n = u0m,n for N
m, n N+.
We will use the implicit method solve the problem, so we choose
the temporal weighting
= 1. The algorithm is given as follows
42
-
7/31/2019 Barrier Option
45/53
Numerical solutions 4.2 Numerical Scheme and algorithm
Algorithm :
input N, J, T, r
Calculate k = 0.5 1 2 T/J, h = (xmax xmin)/N,a = 2r/(12), b =
1/2
Initialize v0(1 : N + 1, 1 : N + 1) using the initial value v0 =
(max(ex, ey) 1)+
Search for the barrier
If found H = k then
v0(k : N + 1, :) = 0
v0(:, k : N + 1) = 0
EndIf
x0 = [x10, x
20, x
30] (starting point)
lb = [1 , 2 ,
] (lower bound)
ub = [+1 , +2 ,
+] (upper bound)
For i = 2 to N do
For j = 2 to N do
a1 = vi+1,j 2vi,j + vi1,j
a2 = vi+1,j+1 vi,j+1 ui+1,j1 + vi1,j1
a2 = vi,j+1 2vi,j + vi,j1
f(sg1, sg2, rh) = a1sg21 + a3sg
22 + 2a2sg1sg2rh
CALL MATLAB function fmincon(f,x0,[],[],[],[],lb,ub)
1 = sg1, 2 = sg2, = rh
aa = 2 r/(1 2), bb = 1/2
cc = k b/(2 h2), dd = k/(2 b h2), ee = k/(4 h2), ss = 1 dd
cc
ui,j = ss vi,j + cc(vi+1,j + vi1,j) + dd(vi,j+1 + vi,j1) +
ee(vi+1,j+1
vi,j+1 vi+1,j1 + vi1,j1)
end do j
end do i
Solve the system equation of size (N 1)2 (N 1)2
43
-
7/31/2019 Barrier Option
46/53
4.2 Numerical Scheme and algorithm Numerical solutions
44
-
7/31/2019 Barrier Option
47/53
Bibliography
[1] Andersen L., J. Andreasen, and David Elizer. 2000. Static
replication of barrier option.
Working Paper.
[2] Avellaneda, M., Levy, A., and Paras, A. 1995. Pricing and
hedging derivatives in markets
with stochastic volatilities. Applied Mathematical Finance. 2,
p.73-88.
[3] Avellaneda, M. and A. Paras. 1996. Managing the volatility
risk of portfolios of deriva-
tives securities: the Lagrangian uncertain volatility model.
Applied Mathematical Fi-
nance 3, p.21-52.
[4] Bardi, M. and I. Capuzo Dolcetta. 1997. Optimal control and
viscosity solutions to
Hamilton-Jacobi-Bellman equations. Birkhauser Boston.
[5] Barles, G. 1997. Convergence of numerical schemes for
degenerate parabolic equations
arising in finance. In L.C.Rogers and D. Talay (Eds.), Numerical
Methods in Finance,
p.1-21. Cambridge University Press, Cambridge.
[6] Barles G. and J. Burdeau. 1995. The Dirichlet problem for
semilinear second-order de-
generate elliptic equation and application to stochastic exit
time control problem. Com-
munication in Partial Differential Equations, 20(1-2),
p.129-178.
[7] Barles G. and E. Rouy. 1998. A strong comparison result for
the Bellman equation arsing
in stochastic exit time control problem and its application.
Communication in Partial
Differential Equations, 23(11-122), p.1995-2033.
[8] Barles G. and Perthame. 1988. Exit time problems in optimal
control and vanishing
viscosity method. SIAM journal in Control and Optimisation. 26.
p.1133-1148.
45
-
7/31/2019 Barrier Option
48/53
BIBLIOGRAPHY BIBLIOGRAPHY
[9] Barles G. and Perthame. 1990. Comparison principle for
Dirichlet type Hamilto-Jacobi
equations and singular pertubations of degenerated elliptic
equations. Applied Math. and
Optimization, 21.
[10] Barles G. and P.E. Souganidis. 1991. Convergence of
approximation schemes for fully
nonlinear second order equations. Asymptotic Analysis. 4.
p.271-283.
[11] Bensoussan, A. 1982. Stochastic control by functional
analysis methods. North-Holland,
Amsterdam.
[12] Bergman Y.Z., B.D. Grundy, and Z. Wiener. 1996. General
properties of option prices.
The Journal of Finance, 51(5). p.1573-1610.
[13] Bingham, N.H. and R. Kiesel. 1998. Risk-Neutral Valuation:
Pricing and Hedging Fi-
nancial Derivatives. Spinger, New York.
[14] Black, F. and M. Schole. 1973. Pricing of Options and
Corporate Liabilities. Journal of
Political Economy, 81,p637-659.
[15] Borkar, V.S. 1989. Optimal Control of Diffusion Processes,
Pitman Research Notes, No.203, Longman Sci. and Tech. Harlow,
UK.
[16] Boyle, P.B. and Yisong Tian. 1998. An explicite finite
difference approach to the pricing
of barrier options. Applied Mathematics Finance, 5, p.17-43.
[17] Brown, H., D. Hobson, and L. Rogers. 2001. Robust hedging
of barrier options. Mathe-
matical Finance. 11(3), p.285-314.
[18] Caffarelli, L.A. 1989. Interior a priori estimates for
solutions of fully non-linear equa-
tions. Annals of Mathematics 130. p.189-213.
[19] Carr, P. K. Ellis, and V. Gupta. 1998. Static hedging of
exotic options. Journal of
Finance, 53, p.1165-1191.
[20] Cvitanic, J. and I. Karatzas. 1993. Hedging contingent
claim with constrained portfolio.
Annal Applied Probability. 3. p.652-681.
[21] Crandall M. and P.L. Lions. 1983. Viscosity solutions of
Hamilton -Jacobi equations.
Transaction American Mathematic Society. 277(1). p.1-42.
46
-
7/31/2019 Barrier Option
49/53
BIBLIOGRAPHY BIBLIOGRAPHY
[22] Crandall, M.G., H. Ishii, and P.L. Lions. 1992. Users guide
to viscosity solution of
second order partial differential equation. Bull. Amer. Math.
Soc., 27, p.1-67.
[23] Crandall, M. G. 1997. Viscosity Solutions : A Primer.
Viscosity solution and Applica-
tions. Eds. I.C. Dolcetta and P.L. Lions. p.134-185.
[24] Crandall, M. G., M. Kocan, and A. Swiech. 2000.LP-Theory
for fully nolinear uni-
formly parabolic equations. Communication in Partial
Differential Equations, 25(11&12),
p.1997-2053.
[25] Crandall, M. G., M. Kocan, and A. Swiech. 1999.Existence
results for boundary prob-
lems for uniformly elliptic and parabolic fully nonlinear
equations. Electronic Journal of
Differential Equations. 24, p.1-20.
[26] Cvitanic, J and Karatzas. 1993. Hedging contingent claim
with constrained portfolion.
Ann. Applied Probability 3, p.523-545.
[27] Davis M.H.A. and J.M.C. Clark. 1994. A note on
super-replicating strategies. Phil.
Trans. R. Soc. London A 347, p.485-494.
[28] Duffie D. 1996. Dynamic Asset Pricing Theory. Standford
University, Academic Press,
California
[29] Durrett, R. 1996. Stochastic Calculus: A practical
Introduction. CCR Press, Florida.
[30] Derman, E., D Ergener, and I. Kani. 1995. Static options
replication. Journal of Deriva-
tives, 2(4). p.78-95
[31] Elliott, R.J. and P E. Kopp. 1999. Mathematics of Financial
Markets Springer Verlag.
[32] El-Karoui N. and M.C. Quenez. 1995. Dynamic programming and
the pricing of contin-
gent claim in an incomplete market. SIAM, Journal of Control and
Optimisation. 33.
p.29-66.
[33] El-Karoui N., M. Jeanblanc-Pique, S.E. Shreve. 1998.
Robustness of the Black-Schole
Formula. Math. Finance 8(2), p.93-126.
[34] Fleming, W.H. and H.M. Soner. 1993. Controlled Markov
Processes and Viscosity So-
lution. Springer-Verlag, New-York.
47
-
7/31/2019 Barrier Option
50/53
BIBLIOGRAPHY BIBLIOGRAPHY
[35] Fleming, W.H and R.W. Rishel. 1975. Deterministic and
Stochastic Optimal Control.
Springer-Verlag, New-York.
[36] Frey, R. and C.A. Sin. 1999. Bounds on European option
prices under stochastic volatil-
ity, Mathematical Finance. 9(2), p.97-116.
[37] Frey R. 2000. Superreplication in stochastic volatility
models and optimal stopping. Fi-
nance and Stochastics. 4. p.161-187.
[38] Gill P.E., W. Murray, and M.H. Wright.1981. Practical
Optimization. Academic Press,
London.
[39] Gozzi, F and T. Vargiolu. 2002. Supperreplication of
European Multiasset Derivatves
with Bounded Stochastic Volatility. Math. Methods of Oper.
Research.
[40] Harrison, J.M. and S.R Pliska. 1981. Matingales and
stochastic integrals in the theory
of continuous trading. Stochastic processes and Applications.
11. p.215-260.
[41] Harrison, J.M. and S.R Pliska. 1983. A stochastic calculus
model of continuous trading:
Complete markets. Stochastic processes and Applications. 15.
p.313-316.
[42] Heynen R. and Harry Kat. 1994. Crossing Barrier. Risk,
7(6). p.46-49
[43] Hobson, David G. 1998. Volatility misspecification, option
pricing and superreplication
via coupling. The Annals of Applied Probability 8(1),
p.193-205
[44] Hull, J.C. and White, A. 1987.The pricing of Option on
Assets with Stochastic Volatil-
ities. Journal of Finance 42, p.281-300.
[45] Hull J.C. 1997. Options, Futures, and Other Derivatives3rd
Edition, Prentice-Hall, New
Jersey.
[46] Jensen, R. 1988. The maximum principle fro viscosity
solutions of fully nonlinear second
order. Arch. Rational Mech. Anal. 101. p.1-27. PDE
[47] Karatzas, I. 1996. Lectures on mathematics of finance. CRM
monograph series, ISSN
1065-8599; v.8
[48] Karatzas, I. and S.E. Shreve. 1991. Brownian Motion and
Stochastic Calculus. Springer-
Verlag, New York.
48
-
7/31/2019 Barrier Option
51/53
BIBLIOGRAPHY BIBLIOGRAPHY
[49] Krylov, N.V. 1990. Control Diffusion Processes.
Springer-Verlag, New York.
[50] Krylov, N.V. 1995. Introduction to the Theory of Diffusion
Processes. American Math-
ematical Society.
[51] Kwok, Y.K., L. Wu, and H. Yu. 1998. Pricing multi-asset
options with an external
barrier. International Journal of Theoretical and Applied
Finance. 1(4), p.523-541
[52] Lions, P.L. 1983. Optimal Control of Diffusion Process and
Hamilton-Jacobi-Bellman
Equation: Part I: The Dynamic Programming Principle and
Applications. Comm. in
Partial Differential Equations, 8(10), p.1101-1174.
[53] Lions, P.L. 1983. Optimal Control of Diffusion Process and
Hamilton-Jacobi-Bellman
Equation: Part II: Viscosity Solutions and Uniqueness . Comm. in
Partial Differential
Equations, 8(11), p.1229-1276.
[54] Lions, P.L. 1983. Optimal Control of Diffusion Process and
Hamilton-Jacobi-Bellman
Equation: Part III: Regularity of the optimal cost function .
Pitman, College de France
Seminar.
[55] Lyons, T. 1993. Uncertain volatility and the risk-free
synthesis of derivatives. Applied
Mathematical Finance 6, p.1969-1984.
[56] Ma, Jin and Jiongmin Yong. 1999. Dynamic programming for
multidimensional stochas-
tic control problems. Acta Mathematica Sinica, English Series 15
(4), p.485-506.
[57] Margrabe, W. 1978. The price to exchange an asset for
another. The Journal of Finance
1, p.177-186.
[58] Merton R.C. 1973. The theory of rational option pricing.
Bell Journal of Economics and
Management Scince. 4. p.141-183.
[59] Musiela, M. and M. Rutkowski. 1997. Martingale Methods in
Financial Modelling, vol.
36 of Applications of mathematics: Stochastic Modelling and
Applied Probability. Sp-
inger, New York.
[60] Oksendal, B. 1995. Stochastic Differential Equations.
Fourth Edition, Springer Verlag,
New York.
49
-
7/31/2019 Barrier Option
52/53
BIBLIOGRAPHY BIBLIOGRAPHY
[61] Pooley, D.M., P.A. Forsyth, and K.R.Vetzal. 2001. Numerical
convergence properties of
option pricing PDEs with uncertain volatility. Working Paper.
University of Waterloo,
Waterloo, Ontario, Canada.
[62] Rich D. R. 1994. The mathematical foundations of barrier
option-pricing theory. Ad-
vances in Futures and Operation Research, 7,p.267-311.
[63] Romagnoli S. and T. Vargiolu. 2000. Robustness of the
Black-Scholes approach in the
case of option on several assets. Finance and Stochastics, 4,
p.325-341.
[64] Rubinstein M. and E.S. Reiner. 1991. Breaking down the
barrier. Risk 4(8), p.28-35.
[65] Schmock U., S. E. Shreve and U. Wystup. 2001. Valuation of
exotic under shortselling
constraints. Working Paper. http://www.math.ethz.ch/
schomock
[66] Soner, Halil M. 1986. Optimal control problems with
state-space constraints. SIAM Jour-
nal on Control and Optimisation. 24. p.552-562.
[67] Soner, Halil M. 1997. Controlled Markov Processes,
Viscosity Solutions and Applications
to mathematical Finance. in Viscosity solution and Applications.
Eds. I.C. Dolcetta and
P.L. Lions. p.134-185.
[68] Shreve, E.S.Lecture on Stochastic Calculus and Finance
.
http://www-2.cs.cmu.edu/ chal/shreve.html
[69] Steele, J.M. 2001. Stochastic Calculus and Financial
Applications. Springer-Verlag, New
York.
[70] Touzi Nizar. 1999. Super-replication under proportional
transaction costs: From discrete
to continuous-time models. Mathematical Methods of Operations
Reserach. 50, p.297-
320.
[71] Wang, L. 1992. On the regularity of fully nonlinear
parabolic equation : I, Communica-
tions in Pure and Applied Mathematics. 45.p.27-76
[72] Wang, L. 1992. On the regularity of fully nonlinear
parabolic equation : II, Communi-
cations in Pure and Applied Mathematics. 45.p.141-178
50
-
7/31/2019 Barrier Option
53/53
BIBLIOGRAPHY BIBLIOGRAPHY
[73] Wong H.Y. and Y.K. Kwok. 2001. Multi-asset barrier option
and occupation time de-
rivetives. Working paper. Dept. of Mathematics, Hongkong
University of Science and
Technology.
[74] Yong J. and X.Y, Zhou. 1999. Stochastic Control :
Hamiltonian Systems and HJB
Equations Springer-Verlag, New York.
[75] Zvan R., K.R. Vetzal, and P.A. Forsyth. 2000. PDE method
for pricing barrier option.
Journal of Economic Dynamics and Control. 24. p.1563-1590.
[76] Zvan R., K.R. Vetzal, and P.A. Forsyth. 1998. A general
finite element for PDE option
pricing models. Working paper. University of Waterloo,
Canada.