Embed Size (px)
Citation preview
Volume 2, Issue 2, February 2017 ISSN (online): 2456-0006
International Journal of Science Technology Management and Research
Available online at: www.ijstmr.com
IJSTMR © 2017 | All Rights Reserved 9
Automatic Bottle Filling System for Different
Sized Bottles
Dnyaneshwar Ambadas Avhad Priyanka Laxman Kedar Dept. of Electrical Engineering Dept. of Electrical Engineering
Shatabdi College of Engineering Shatabdi College of Engineering Nashik, India Nashik, India
Pallavi Manikrao Buchude
Dept. of electrical engineering
Shatabdi College of Engineering Nashik, India
Abstract: The Automatic Bottle Filling System for Different Sized Bottles will be used for small plants and businesses where
single conveyor is used but different size of goods or in different quantities can be packaged. In this system requirement of
number of conveyors is reduced. This saves our most economical time which is requires to set up the programme and hardware
changes for different quantities.
Keywords: Automation, PLC, Bottles or container, Sensors Different size, Conveyor.
I. INTRODUCTION
The field of automation has a notable impact in a wide range of industries beyond manufacturing. Automation is the use
of control systems and information technologies to reduce the need for human work in the production of goods and
services. In the scope of industrialization, automation greatly decreases the need for human sensory and mental
requirements as well. Automation plays an increasingly important role in the world economy. One of the important
applications of automation is in the soft drink and other beverage industries, where a particular liquid has to be filled
continuously. For these kinds of applications the trend is moving away from the individual device or machine toward
continuous automation solutions. Totally Integrated Automation puts this continuity into consistent practice. Totally
Integrated Automation covers the complete production line, from receipt of goods, the production process, filling and
packaging, to shipment of goods. Our project is also an application of automation wherein we have developed a liquid
filling to bottles of different height. The various processes are controlled using a PLC (Programmable Logic Controller).
International Journal of Science Technology Management and Research
Volume 2 , Issue 2 , February 2017
www.ijstmr.com
IJSTMR © 2017 | All Rights Reserved 10
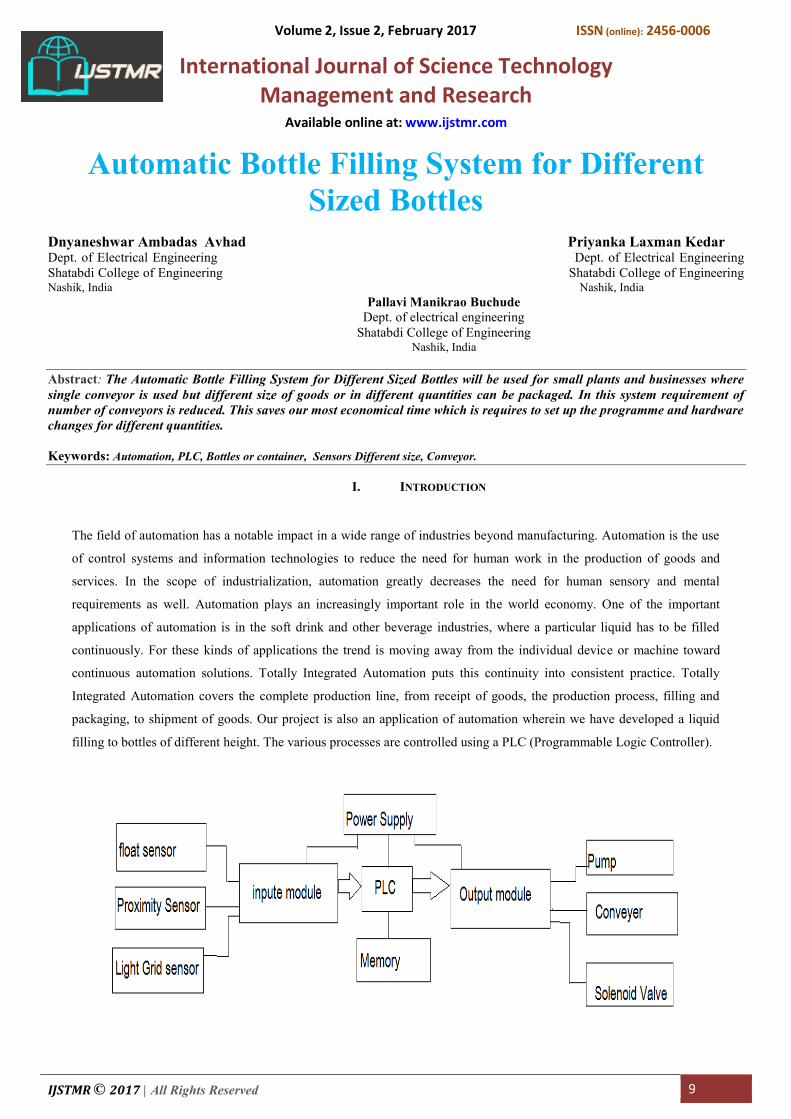
Fig.1. Block diagram of system
In above figure shows the overall project block diagram. The main device is used know as PLC. PLC having input and
output module and it is required power supply is 24 v dc is given by the SMPS. The PLC is used of Allen Bradley 1400
which having following features:
1. Rugged design: suitable for harsh industrial environments against high temperature variations, dust, and
vibrations.
2. Industry standard I/O interfaces: capable of communicating with other PLCs, computers and intelligent devices.
3. Industry standard programming languages: easily learned and understood. Programming is primarily concerned
with logic, timing, counting and switching operations.
4. Field programmable.
5. Reduces hard wiring and wiring cost.
6. Monitoring, error checking and diagnostics capability.
7. Competitive in both cost and space requirement.
8. Hardware: consists of the actual device technology, i.e. the PCBs, integrated modules, wires, battery, housing
etc.
9. Firmware: is the software part, known as executive software, that is permanently installed and supplied by the
PLC manufacturer. Programs are usually stored in ROM or EPROM.
10. Software: is the user program. User programs are usually stored in the RAM.
To the PLC sensors are connect at input side are float sensor, proximity sensor and light grid sensor. And the at
output side of PLC conveyor motor, pump motor and solenoid valve is connected.
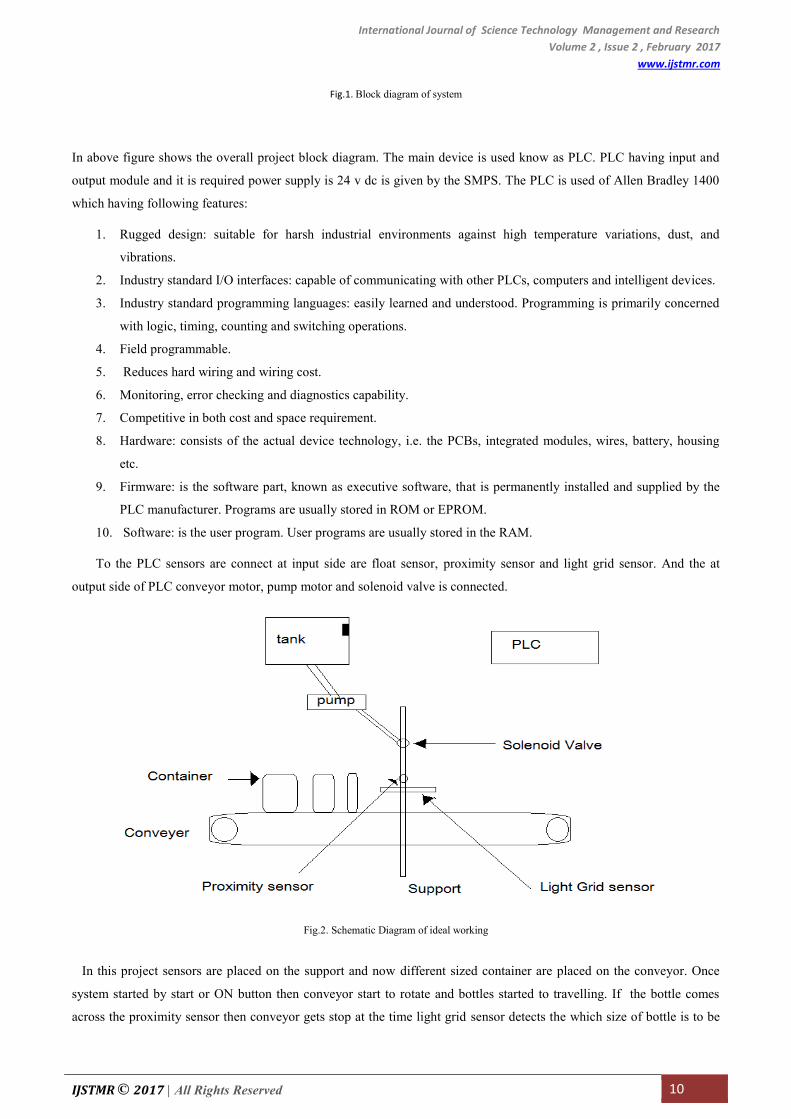
Fig.2. Schematic Diagram of ideal working
In this project sensors are placed on the support and now different sized container are placed on the conveyor. Once
system started by start or ON button then conveyor start to rotate and bottles started to travelling. If the bottle comes
across the proximity sensor then conveyor gets stop at the time light grid sensor detects the which size of bottle is to be
International Journal of Science Technology Management and Research
Volume 2 , Issue 2 , February 2017
www.ijstmr.com
IJSTMR © 2017 | All Rights Reserved 11
filled. Once the size is detected the solenoid valve is get open and at that time pump is get ON and bottles started filling
at faster rate.
According to the size of bottle timer gets on and filling is done by time calculations. After the end of time pump is OFF
and solenoid valve get closed. And conveyor starts to run. All the procedure is repeated for all of single bottles. All
control done by the PLC by using of ladder logic diagram.
II. PROPOSED CONTROL STRATEGY
For different sized bottle we need to control conveyor, pump and may be solenoid valve if needed when pump is turned
off and any leakage of water. Different sized bottles will contain different quantity of liquid to be fed hence to control
timing operation on pump. We can replace light grid sensor with other IR sensor to detect the size of bottle, we are used
light grid sensor for effective result. Conveyor will stop for every bottle, first we have to consider number of size of
bottles to be fed, we are selected two size of bottles. For that sizes pump is ON for small duration for small bottle and
more for big bottles.
III. STUDY RESULTS
Result from this studies we get one of the advantage is that reduces the number of requirement of conveyor and
wastage of the time for setup for different sized bottles.
3.1 POWER SUPPLY ARRANGEMENT
FOR PLC:
For PLC 24V DC is requires is given through the SMPS. 230V AC has given to the SMPS which covert to 24V
DC.
FOR SENSORS:
Sensors have different ratings and different types of supply required.
In our project
1. For float sensor - 24V DC / 12V DC gives discrete input to PLC
2. For light grid sensor – 24 V DC having analog output from 0 – 24V DC
3. Proximity sensor – 24V DC gives discrete input to PLC.
The supply is arranged using AC/DC converters and the input to converters is 230 AC.
FOR OUTPUT DEVICES:
1. Solenoid valve – 12V DC / 220V AC
2. Conveyor motor – 24V DC
3. Pump motor – 12 DC

International Journal of Science Technology Management and Research
Volume 2 , Issue 2 , February 2017
www.ijstmr.com
IJSTMR © 2017 | All Rights Reserved 12
The supply is arranged using AC/DC converters and the input to converters is 230 AC.
CONCLUSION
The main objective of this project is to develop a bottle filling system based on certain specification. More
features can be added to this system depending on the size, shape and the weight of the bottles, filling operation can be
implemented capping operation can be done using piston arrangement.
REFERENCES
1. Hong-bo Liu, Li-zhong wang, Zhen-yu Hou and Guang-de WANG “Research on System of Liquid Automatic Filling” IEEE 2011.
2. Shaukat.N, ,PLC based automatic liquid filling process, Multi Topic Conference 2002,IEEE publications.
3. Jagat Diman,, Dilip Kumar,” Hybrid method for automatically filling of the chemical liquid into bottles using plc and scada”, IJERGS, Vol
2, issue – 6,OCT-NOV 2014(ISSN 2091-2730).
4. Kelvin T Erickson, “A Programmable logic controllers”, IEEE potentials, pp.14-17, march-1996.
5. Gerardo Gonzalez-Filgueira, “Modeling of an Olive Oil Plant as a Digital Ecosystem” University of A Coruna, Ferrol, Spain, IEEE, pp.
3942-3947, 2009.
6. Based Filling Plant‖ by Kumar Dhiraj, F. Ansari, Rajiv Kumar & Kumari Namrata. International Journal of Electronics Engineering, 4 (1),
2012
7. Automated bottle filling, capping & embossing using PLC‖ by Dinesh kumar, Chintam V.B. Aditya kumar, Alkeya B, Bhanushree P.
International journal of intelligent electronic systems vol no. 6 1 January 2012.
8. Wei Li, Zhengduo Pang, Haitao Zhang, Guoying Meng,―Design of Multi-loading Control System for Belt Conveyor‖, 978-1-4244- 7161-
4/10/$26.00 ©2010 IEEE.
9. PLC Based Automatic Bottle Filling and Capping System With User Defined Volume Selection‖ by T.Kalaiselvi, R.Praveena, Aakanksha.R,
Dhanya.S International Journal of Emerging Technology and Advanced Engineering Website: www.ijetae.com (ISSN 2250-2459, Volume
2, Issue 8, August 2012)