Embed Size (px)
Citation preview

Automatic Relay Setting
By
Donald M. MacGregor, Ph.D. (Electrocon International, Inc, USA)
A. T. (“Tony”) Giuliante, Fellow of IEEE (ATG Exodus, Inc., USA)
Russell W. Patterson, P.E. (Tennessee Valley Authority, USA)
Presented to
56th Georgia Tech Protective Relaying ConferenceAtlanta, Georgia
May 1-3, 2002


1
Automatic Relay Setting
Donald M. MacGregor A. T. (“Tony”) Giuliante Russell W. Patterson
1. Introduction
Modern numerical relays provide many protection functions in a single package. In order to managethe large number of elements and settings, an automatic, systematic, setting procedure is almostessential. Here we present setting rules for the electrical parameters, such as distance element reachand overcurrent pickup. These rules are based largely on the standards and experience at theTennessee Valley Authority, and follow the principles given in [1]. They are widely applicable to bothstepped-distance schemes and directional comparison pilot schemes such as POTT, PUTT, and blockingschemes.
A protection simulation environment, described in section 2, enables a user to encode the setting rules.Detailed reports identify possible conflicts in the setting rules.
Section 3 shows how the user can run the algorithms and adjust the setting parameters. Eachalgorithm includes a module that specifies the tap names for the relay models in use, allowing settingsto be saved in the system database and transferred to the relay electronically.
Section 4 outlines a typical case involving directional overcurrent and distance elements in aPermissive Overreach Transfer Trip scheme. This scheme uses direct tripping from zone 1 andpermissive tripping from a forward pilot element, with two time-delayed zones for a backup stepped-distance scheme. The permissive signal is echoed to allow sequential tripping after one breaker opens.
Section 5 explains the setting rules in detail. All directional comparison pilot schemes use acombination of underreaching, overreaching and reverse blocking zones, as follows:
• Distance zone 1 (phase and ground) to cover close-in faults
• Zone 2 and/or forward pilot zone to cover the entire protected line
• Forward zone 3 as backup protection for downstream lines
• Blinders or other load-encroachment elements
• Overcurrent fault detectors
• Reverse pilot zone, coordinated with the facing forward pilot zone for blocking
• Power-swing (out-of-step) detectors
• Ground and negative-sequence overcurrent elements with several levels of sensitivity
• Directional elements
• Zone timers
• Neutral time-overcurrent element

2
An apparent impedance and an operating margin, defined in section 6, measure how close a relayelement is to its operating limit for a particular fault. For solid faults, overcurrent elements use themultiples of pickup and distance elements use the relative distance of the apparent line impedancefrom the characteristic. For resistive faults, the maximum fault resistance seen by zones 1 to 3 ispresented graphically as a function of distance, using the detailed phasor operating equations for theparticular relay model.
Section 7 demonstrates a stepped-event simulation of the permissive tripping sequence. This checksthe settings and will find any primary-backup miscoordinations.
2. Protection Simulation
The protection simulation environment allows a user to compute settings and send them to a relay, orto read settings from a relay and test them in the modeled system. The components are:
• A network model (buses, generators, lines, shunts, and transformers) and a short-circuit analysiswith high-level commands for faults and outage contingencies [2]. Currents and voltages aretreated as steady-state phasors.
• A library of detailed relay models [3]. A relay model consists of instantaneous overcurrent, timeovercurrent, directional, distance, voltage, timer, and recloser elements, with auxiliary elements forinternal logic and pilot (teleprotection) schemes. Special code for each relay model interprets thesetting names and evaluates the comparators using a steady-state phasor analysis [4]. As a result,element response is always based on the actual relay logic. Actual settings are modeled so that therelay model is “set” in the same way as the physical device.
• Rules for locating relays. An integrated database [5], with an interactive editor, contains the CTsand VTs connecting the relays to the network, and specifies the protected equipment and its logicalbreakers.
• A macro facility. The macro language has many commands associated with a high-level language,such as IF-THEN-ELSE, DOWHILE, and DO loops tailored to power system applications. Forexample, DOXFMRS and DOLINES find the transformers and lines at a bus, and DOPATH andDOREMOTE search through a meshed network with load-tap buses. Standard functions (e.g. SIN,ABS, and POLAR) and special protection functions (e.g. OPERATING_CYCLES andGET_TOC_TIME) are installed. Support for defining and looping through sets of buses, branches,and relay elements is provided. The engineer can access all information in the database (e.g. lineimpedances) and quantities developed by the programs (e.g. fault currents and source impedances).The relay setting rules are encoded using the macro language and can be modified by a user.Settings for a 38kV stepped- distance scheme have been obtained in this way for several years [6].
• Import/export facilities to communicate with a physical relay indirectly via relay vendor databases,or to send settings to a field engineer. Most numerical relays have their own setting software andcan store relay settings in a database. The independent simulation environment complements thisby modeling together the entire network and its protective devices from multiple vendors. Settingscan then be transferred to the relay vendor’s database product for subsequent electronictransmittal to the relay, making paper setting sheets unnecessary.

3
3. Setting Procedure
The user chooses one relay from the system database and then selects one of the setting algorithms.These prompt for the maximum load current, the load angle, and the minimum pickup needed to avoidoperation for unbalanced load currents. Then the primary impedance reaches and pickup currents orvoltages are computed at the network level. These settings apply to any relay model. Next, secondarytap settings are computed for the elements that exist in the chosen relay. The user can test thesettings while they are in temporary memory or can save them in the system database. The databasecan hold groups of alternative settings for trial purposes and for varied network conditions.
A user can add algorithms for other relay functions, such as loss-of-potential logic, switch-onto-faultdetection and breaker failure protection.
Actual relays use some or all of the parameters in Table 1. The values shown are typical and are easilyedited. Each algorithm includes a module that specifies the tap names for the relay models in use.
Table 1 – Adjustable Relay-Setting Quantities
Stepped-Distance Mho
Parameter Value DescriptionUSE_APPARENT_IMPEDANCEUSE_APPARENT_IMPEDANCEDEFAULT_MAX_LOAD_CURRENTDEFAULT_LOAD_DEGDIST_LOAD_FACTORZONE_1_FRACTIONLINE_END_FRACTIONZONE_2_FRACTIONZONE_3_FRACTIONZONE_3R_FRACTIONXFMR_FRACTION12XFMR_FRACTION3
FALSETRUE3000301.50.81.20.21.20.250.50.8
FALSE to set zones from line ohms onlyTRUE to adjust zones using fault studyDefault load ampsDefault load angleMax load ohms/Max settingZone 1/Line ohmsZone 2/Line ohms at line endZone 2 overreach/Downstream lineZone 3 overreach/Downstream lineZone 3 offset/Min reverse lineZone 2 overreach into tapped XFMRZone 3 overreach into tapped XFMR
Pilot Mho
Parameter Value DescriptionFORWARD_PILOT_FRACTIONREVERSE_PILOT_FRACTION
0.21.5
Forward pilot overreach/ Downstream lineReverse pilot/Max reverse line
Definite-Time Overcurrent
Parameter Value DescriptionIOC_ISEC_MINIOC_LEVEL_1_FRACTIONIOC_LEVEL_2_FAULT_OHMSIOC_LEVEL_2_FRACTIONIOC_LEVEL_3_FRACTIONIOC_XFMR_FRACTION
0.05 I_Rated 1.3 40 0.5 0.5 1.25
Min IOC pickup in relay modelPickup/max current for remote-bus faultsFault resistance tested at remote busPickup/Current for remote-bus resistive faultReverse Level 3/Remote level 2 pickupLevel 2 multiples for XFMR secondary fault

4
Fault Detectors
Parameter Value DescriptionFD_PG_ISEC_MINIOC_LOAD_FACTORZONE_1_PICKUP_FRACTIONZONE_1_LINE_END_FRACTION
0.1 I_Rated 1.1 0.8 0.33
Default min phase-ground pickup50PP1 pickup/Max load ampsZone 1 pickup/Min amps for reach faultsZone 1 pickup/Min amps with line end open
Negative-Sequence Directional
Parameter Value DescriptionMIN_A2DEFAULT_DES_A2MIN_50Q
0.02 0.1 0.05 I_Rated
Min I2/I0 relay tapDefault min I2/I0Current pickup in relay model
Inverse-Time Overcurrent
Parameter Value DescriptionTOC_MULTTOC_ISEC_MINTOC_CYCLES
10 0.1 I_Rated 30
Amps/Pickup for remote-bus SLG faultMin TOC pickup in relay modelDelay at TOC_MULT
Timers for Tripping
Parameter Value Description of time delayZ1_PH_CYCZ1_GND_CYCZ2_PH_CYCZ2_GND_CYCZ3_PH_CYCZ3_GND_CYCZ4_PH_CYCZ4_GND_CYCFWP_PH_CYCFWP_GND_CYCRVP_PH_CYCRVP_GND_CYCD67N1_CYCD67Q1_CYCD67N2_CYCD67Q2_CYCD67N3_CYCD67Q3_CYCD67N4_CYCD67Q4_CYC
0 0 20 20 75 75 0 0 20 20 75 240 0 0 0 0 0 0 0 0
Zone 1 phaseZone 1 groundZone 2 phaseZone 2 groundZone 3 phaseZone 3 groundZone 4 phaseZone 4 groundForward pilot phaseForward pilot groundReverse pilot phaseReverse pilot groundNeutral IOC level 1 ground IOCNeg-seq IOC level 1 ground IOCNeutral IOC level 2 ground IOCNeg-seq IOC level 2 ground IOCNeutral IOC level 3 ground IOCNeg-seq IOC level 3 ground IOCNeutral IOC level 4 ground IOCNeg-seq IOC level 4 ground IOC
Power-Swing Detector
Parameter Value DescriptionBLINDER_INNER_R_DIV_ZTBLINDER_RATIO
0.2882.5
Blinder inner resistance/System impedanceMin (outer R / inner R )

5
BLINDER_DELROS_X_RATIO_FWDOS_X_RATIO_REVOS_MIN_X_REVOS_DELXOS_OPER_CYCOS_WAY_IN_TRIP_CYCOS_WAY_OUT_TRIP_CYCOS_BLOCK_CYCOS_OVERRIDE_CYC
2.01.11.10.10.10.02 * Frequency0.02 * Frequency0.02 * Frequency0.05 * Frequency0.4 * Frequency
Min (outer R - inner R) (sec. ohm)Inner reactance/Blocked-zone forward reachInner reactance/Blocked-zone reverse reachMin reverse reach/line ohmsMin (outer X - inner X) (sec. ohm reactance)Max swing cycles treated as a faultMin swing cycles on way in for trippingMin swing cycles on way out for trippingMin swing cycles for blockingSwing cycles before overriding the out-of-stepelements
4. Parallel 161kV Lines at TVA
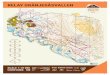
To illustrate the setting rules, we use an actual case (Figure 1) at the Tennessee Valley Authority,involving two coupled 161kV lines with equal lengths; line #1 is tapped at Ackerman station.
(2)
(1) (1)
161_BU_GND
Z2GD,51N248.000
67N2,RECEIVER
4.200
LFZP_TOC484.500
51N21.300
Z1G4.000
LFZP_TZ3No_Op
LFZP_TZ3
94.200
LFZP_TZ3No_Op
161_BU_GND
111.400
MDAR_T2G,MDAR_TOC147.200
G
161.0 kV109 Red Hill 161
161.0 kV
229 Calhn City 5161.0 kV
231 Eupora, MS 5
161.0 kV232 Sturgis 5
161.0 kV239 Louisvi SS 5
161.0 kV376 Ackerman 161
69.0 kV595 Ackrmn 69-1
161.0 kV1151 Adaton 5
161.0 kV1159 Starkvile T2
161.0 kV
1348 Maben Tap 5
69.0 kV2446 Sturgis 3
69.0 kV9409 Ackrmn 69-2
20.0 kV24026 Red Hill U1S
EE C
Figure 1 ———— One-line diagram of protected region.
The impedances in primary ohms are:
Positive Sequence Zero Sequence
Red Hills - Ackerman #1 3.77 @ 85.3 deg 9.37 @ 77.5 deg
Ackerman - Sturgis #1 3.77 @ 85.3 deg 9.37 @ 77.5 deg
Red Hills - Sturgis #2 7.57 @ 85.5 deg 19.03 @ 77.9 deg
Each tapped transformer at bus 376 34.5 @ 90.0 deg at16lkV
28.2 @ 85.2 deg at161kV

6
The computed positive-sequence source-impedance ratio for this case ranges from 1.3 to 4.4 dependingon fault location; this is a “medium” line [1].
Here, a Permissive Overreach Transfer Trip (POTT) scheme uses phase and ground distance relayelements with backup ground and negative-sequence overcurrent elements. Figure 1 shows theoperation for a close-in phase-A-ground fault at Sturgis. Zone 1 opens the local breaker at Sturgis; thedirectional overcurrent element operates at Red Hills with the permissive signal.
The elements in a single zone are shown in Figure 2.
TRIPPING LOGICORPILOT SIGNAL
PHASEDISTANCE
GROUNDDISTANCE
INSTANTANEOUSOVERCURRENT
GROUND TIMEOVERCURRENT
50L
50G
32Q
50N
32Q
50Q
32Q
32Q
21G
50PP
21P32QF
50ABC
67N
51NP
67Q
51N
INSTANTANEOUSOVERCURRENT
Figure 2 ———— Supervised Distance and Overcurrent Relay Elements.
At each line terminal, zone 1 elements (21P1, 21G1, 67N1 or 67Q1) trip instantaneously for internalfaults within their set points, and forward directional pilot elements (21P2, 21G2, 67N2 or 67Q2) coverthe entire line with some overreach. For internal faults, each forward pilot element will transmit apermissive signal to the other terminal. When this signal is received, the local forward pilot elementsthat have operated trip the corresponding breakers, at buses 109 and 232 in Figure 1.
This pilot scheme includes “echo keying” logic and is described in [1 ] as a “directional comparisonhybrid scheme”. A second pilot zone reaches in the reverse direction. External faults at a terminal willsuppress the transmitter functions and inhibit pilot tripping. A permissive signal received at aterminal, e.g. Sturgis, is echoed (after a precautionary delay), unless any of the reverse elements atSturgis (21P3, 21G3, 67N3, or 67Q3) have detected an external fault. If the breaker at Sturgis isalready open (for maintenance or other reasons) and a close-in fault occurs there, the relay at the

7
opposite terminal (Red Hills) will send a permissive signal to Sturgis, and this signal will be echoedback to Red Hills after a set delay (typically 2 cycles). Receipt of the echo signal will allow the breakerat Red Hills to open and clear the fault.
For extra reliability, TVA is using in parallel two independent relay sets from different manufacturers.In one manufacturer’s relay, the pilot zones also serve as zones 2 and 3 and provide time-delayedbackup for the adjacent lines. The other relay uses zone 1 for instantaneous tripping, uses dedicatedforward and reverse pilot zones, and uses separate zones 2 and 3 for time-delayed backup in a stepped-distance scheme.
In one relay model, the echo signal starts only when the remote permissive signal is received, the localreverse zone 3 has not operated, and the local forward pilot element has not operated within a set time(the “echo block time delay”). In the other relay, the echo signal also requires a “52b” switch to assertwith the local breaker open.
5. Rules for Relay Setting
Here we explain the detailed setting rules for:
• Distance zones and their fault detectors• Load-encroachment elements• Power-swing detectors• Definite-time overcurrent elements• Neutral time overcurrent element• Negative-sequence directional element
The algorithms set one element at a time and warn where setting rules conflict. They do notautomatically coordinate relays at different locations, but the user can investigate coordinationproblems graphically (section 6).
5.1 MHO Distance Elements
The R-X diagram in Figure 3 shows the static mho characteristics of zone 1, the forward pilot element,and a facing reverse pilot element that blocks tripping for external faults.

8
109
232
-10
10
20
30
40
-20 -10 10 20
XP.Ohms
RP.Ohms
Figure 3 ———— Local Forward Mho Distance Characteristics and Remote Reverse Characteristic.
The algorithms use solid faults for initial mho settings. Then all phase zones are checked for loadencroachment. The user supplies the maximum forward and reverse load currents and worst loadangle, from separate load flow computations.
The actual memory-polarized characteristics are expanded circles and allow the zone to cover resistivefaults [4 ,7, 8]. However, for solid faults, the angle of the apparent impedance and the MTA are bothwithin a few degrees of the line angle. For settings based on solid faults, therefore, it is a usefulapproximation that a distance element will operate whenever the apparent impedance magnitude isless than the reach setting. Subsequently we check the operation for resistive faults using the completecomparator equations.
5.1.1 Zone 1
Zone 1 reaches 80% along the protected line. Specifically, the total positive-sequence and zero-sequenceline impedances Z1 and Z0 are found from the database. The maximum torque angle (MTA) equals thezone 1 line angle arg(Z1), and the set reach is 80% of the magnitude of Z1. Then the phase zone is

9
further limited to 66 percent of the apparent impedance at maximum forward load current and aspecified power angle, typically 30 degrees.
The zero-sequence compensation factor [9] multiplying the neutral current is set as:
( )0 0 1k = Z /Z -1 /3
To avoid overreach due to mutual coupling [7], the reach of the zone 1 ground distance element is alsolimited to 80% of the least apparent impedance for a solid single-line-ground fault on the remote bus.The calculation is run first with all lines in service and then with coupled lines grounded one at a time,and with intermediate infeed removed.
The supervising phase fault detector is useful to prevent instantaneous operation on loss of potential.It is desirable to set it above expected load current while maintaining a margin below expected faultcurrent to allow the distance elements to operate reliably. In relays with a separate fault detector(50PP1) for zone 1, the recommended setting (based on experience) is the lower of:
(a) 0.8 times the least fault current for solid faults 80% along the line, with sources out one at a timebehind the relay bus, and
(b) 0.33 times the fault current for the same faults with the remote breaker open, for sequentialtripping.
To prevent zone 1 from tripping with a loss of potential under load, this pickup must also be set at least10 percent above the maximum load current from temporary overloads and heavy loads under reducedsystem voltage.
The single-phase and ground-fault detectors (50L and 50G level 1 or 2) are allowed to operate with loadcurrents. This is because both 50L and 50G must operate to trip a ground distance zone, and the 50Gresidual elements do not operate with load except under abnormal conditions such as a breaker withone phase open.
In relays with only one fault detector for all zones, current sensitivity for remote faults takes priority,including those in the reverse pilot zone or zone 3. The setting may necessarily be below the maximumload current. These relays have separate elements to block the distance elements under loss ofpotential.
5.1.2 Forward Pilot Zone and Zone 2
These are set from line ohms and from zone 1 apparent impedance and are subsequently checked forinfeed and mutual coupling. Where zone 2 provides time-delayed direct tripping, it must not overreacha downstream zone.
Depending on the status of coupled lines, infeed or mutual coupling along the protected line may limitthe zone 2 reach, especially for resistive faults. Therefore, these overreaching zones are set to cover thelarger of the actual and apparent protected-line impedances, plus a chosen portion (e.g. 20 percent) ofthe shortest adjacent line. The largest apparent impedance is found for faults on a line-end bus, firstwith all lines in service and then with coupled lines outaged one at a time.
The phase zone is further limited to 66 percent of the apparent positive-sequence impedance atmaximum forward load current and a specified power angle.

10
To avoid tripping for faults on the secondary winding of a tapped transformer, zone 2 should notoverreach the primary bus by more than a given percentage (20% to 50%) of the transformer reactance.
Where separate fault detectors 50PP2, 50L2 and 50G2 for zone 2 are available, they are set at the leastrelay current (with one source removed) for remote-bus faults with fault resistance of 40 primary ohms.
The zone 2 timer is set at 20 cycles. Downstream zone 1 elements and breaker-failure protection at theline-end bus (about 15 cycles delay) are allowed to operate first.
5.1.3 Reverse Pilot Zone
A reverse pilot zone blocks echoing of a permissive signal for external faults. Both phase and groundelements should cover 150 percent of the largest apparent impedance calculated for line-end faults (onthe line-side of an open remote breaker) behind the relay. This setting allows the reverse zone tooperate for all external faults seen by the forward pilot zone at the other end of the protected line, as inFigure 3. A detailed coordination check is shown in section 6.
The phase-distance element must not operate under load alone. This limit is set as 66 percent of theapparent impedance due to maximum load current from the protected line into the relay bus, with aspecified power angle.
For the fault detectors (such as 50PP3, 50L3 and 50G3), minimum settings are allowed because: (a)zone 3 direct tripping is delayed by 75 cycles, giving ample time for Loss of Potential Logic to assert andblock tripping of distance elements, and (b) the zone 3 distance elements are set to avoid operationunder maximum load conditions.
5.1.4 Zone 3 of Stepped Distance Scheme
A forward zone 3 should see 1.2 times the impedance to the most distant bus at a depth of 2, but thephase element is also limited by forward load as above. Both phase and ground elements are limited tocover 80 percent of the reactance of tapped transformers. The timer is set at 75 cycles.
Certain relay models allow zone 3 to have a reverse offset. Where this is used, it is set at 25% of theshortest adjacent line behind the relay, to detect local bus faults.
Example of Distance Zone Settings (excerpts):
******************************************************************
Setting MHO DISTANCE elements for Permissive Overreach
******************************************************************
Substation: RED HILLS STEAM PLANTLine: Sturgis 161-kV line No. 1Maximum forward load current 3000 primary ampsHighest power factor angle (deg) for forward load = 30Worst forward load: 30.9854 Primary Ohms at 30 Degrees836.556 MVA 724.479 MW 418.278 MVAR
Worst reverse load: 30.9854 Primary Ohms at 30 Degrees836.556 MVA 724.479 MW 418.278 MVAR

11
************************************************************Relay on 109 376 Ckt 1 RED HILLS STEAM PLANT - ACKERMAN 161-kV SUB 161 kVBase kV 161 Base ohms 259.210************************************************************
*** Zone 1 = 0.80000 * min apparent impedance for remote-bus faultsZone 1 path 109 376 1 to 376Total line ohms 7.54279Phase Setting 0.80000 * 7.54279 = 6.03 OhmGround Setting 0.80000 * 7.15863 = 5.73 OhmMTA 85.3 deg
*** Zone 2 = Longest line or apparent impedance + 0.20000 * shortest adjacent lineZone 2 path 109 376 Ckt 1 to 232 109 Ckt 2
Path 109 376 Ckt 1 to 232 to 232 109 Ckt 2Setting Phs 7.543 @ 85 deg + 0.20000 * 7.567 @ 85 deg
= 9.056 @ 85 deg OhmSetting Gnd 11.521 @ 82 deg + 0.20000 * 7.567 @ 85 deg
= 13.033 @ 83 deg OhmPhase Zone 1 / Max impedance to depth 1 80.0 %Ground Zone 1 / Max impedance to depth 1 75.9 %Phase Zone 2 / Max impedance to depth 1 120.1 %Ground Zone 2 / Max impedance to depth 1 172.8 % (note 1)
*** Zone 3 = 1.2 * longest path to depth 2Zone 3 path 109 376 1 to 229
Using load to limit all phase DIST zonesWorst (least) load impedance / 1.50000 = 20.6569 Primary Ohms at 30 DegreesDesired reach to avoid load = 36.2578 Primary Ohms at 85.2691 deg
Max allowed load at 1.50000 * reach at given load angleZone Pri.Ohm Load deg Amps MVA MW MVAR
1 5.16 30. 18026. 5027. 4353. 2513.2 7.74 30. 12011. 3349. 2901. 1675.3 25.93 30. 3585. 1000. 866. 500. (note 2)
FP 7.74 30. 12011. 3349. 2901. 1675.RP 23.29 30. 3992. 1113. 964. 557.
Checking Transformer Overreach for ground zone 24 remote XFMR buses at bus 376 161 kV
Zone reach (p. ohms) 13.033 @ 85 degZone reach into XFMR (p. ohms) 9.24786 @90 degZone reach into XFMR 27.9 % of XFMR*** Warning: reducing zone ohms from 13.0325 to 10.4028 New reach 20.0 % (note 1)
Phase and Ground MHO elements: desired primary ohmsWithout XFMRS With XFMRS With XFMRS and LOAD
Zone 1 Phs forward 6.03 6.03 6.03Zone 1 Gnd forward 5.73 5.73 5.73Zone 2 Phs forward 9.06 9.06 9.06Zone 2 Gnd forward 13.03 10.40 10.40Zone 3 Phs forward 47.85 30.34 30.34Zone 3 Gnd forward 47.85 30.34 30.34Pilot Phs forward 9.06 9.06 9.06Pilot Gnd forward 13.03 10.40 10.40Pilot Phs reverse 27.25 27.25 27.25Pilot Gnd reverse 13.03 27.25 27.25MTA (deg) for all zones 85.3

12
Notes:
1. The ground zone 2 and the forward pilot zone are computed as 1.728 times the protected line ohmsto overcome infeed and mutual coupling, but are then reduced from 13.0325 to 10.4028 ohms toavoid the tapped transformers at bus 376.
2. With these settings, a load up to 1000 MVA at 30 degrees will appear outside zone 3 with a marginof 50 percent. This is the relay load limit [10], above which the element may misoperate.
Example of Fault Detector Settings (excerpts):
******************************************************************
Setting Fault Detectors for Permissive Overreach
******************************************************************
Minimum allowed fault-detector pickup = 200 Primary A
Zone 1 fault detectors: no load;0.80000 * min current from solid faults 0.8 along line50PP1 Phase-phase Primary A 4282.2150L1 Single phase Primary A 2141.5250G1 3*Izero Primary A 2345.51
Zone 1 fault detectors: no load;0.33 * min current from solid faults 0.8 along line with remote breaker open50PP1 Phase-phase Primary A 2263.6550L1 Single phase Primary A 1131.8350G1 3*Izero Primary A 1048.90
Zone 1 fault detectors: no load; maximum recommended settings:50PP1 Phase-phase Primary A 2263.6550L1 Single phase Primary A 1131.8350G1 3*Izero Primary A 1048.90
Zone 2 fault detectors: no load; 40-ohm faults50PP2 Phase-phase Primary A 827.91250L2 Single phase Primary A 54.384250G2 3*Izero Primary A 163.153*** 50L2 below minimum 200; using minimum*** 50G2 below minimum 200; using minimum
Zone 3 fault detectors are set at the minimum allowed:50PP3 Phase-phase Primary A 20050L3 Single phase Primary A 20050G3 3*Izero Primary A 200
Checking load current for IOC 50PP1
Maximum load current through the relay, in amps = 3000Maximum load current through the relay, in percent= 836.556Maximum phase-phase load current in amps = 5196Maximum PP load current * 1.10000 = 5715.6050PP1 Primary A increased to 5715.6050PP2 and 50PP3 do not require adjustment above load

13
5.2 Quadrilateral Elements
In the TVA application, Zones 1 to 3 use polarized mho phase and ground elements; the directionalovercurrent elements are adequate to extend the protection for resistive faults.
Some relays provide optional quadrilateral (quad) ground elements. These are particularly useful tocover resistive faults on short lines with strong sources, where the mho characteristic may not expandsufficiently [4, 11]. The mho and quad elements have equal reaches in the line-angle direction.Typically, the quad element resistive reaches are set at 20 primary ohms. For the quad characteristic,the constant-reactance line is tilted automatically in the line impedance plane. The tilt eliminatesoverreach or underreach for resistive faults with outward or inward load current. One type of relay[11,12] uses negative-sequence current polarization without additional settings. Another type [9] useszero-sequence polarization and an extra tap setting T which is defined as the phase difference
0 0T = arg (total fault I ) - arg (local relay I )
Here I0 is the zero-sequence current due to a single-line-ground fault at the zone 1 reach point. T is afunction of fault location and the network impedances and is typically between zero and - 10 degrees.The angle T is zero for a homogeneous system (where the zero-sequence source impedance angles at theline ends are both equal to the line angle). If T is set exactly, the reach is independent of load. If Tvaries along the line, T should be set at the largest negative value from a fault study, tilting thereactance line down to the right in the system impedance plane. Then any error in T causesunderreach rather than overreach, increasing security.
5.3 Load Encroachment
Many relays provide shaped load encroachment elements [8] or blinder elements [1,13 ] in case the loadseverely restricts the reach along the line. These are set directly to exclude the expected loadimpedances with a settable safety margin. In both cases, the resistive impedance from the origin to theload encroachment element, measured along the R axis, must be inside the load impedance region. Inthe following example, the least load resistance is reduced by a safety factor of 1.5 to give the blindersetting.
Example of Load Encroachment Settings
******************************************************************
Setting Blinder and Impedance Elements for Load Restriction
******************************************************************
Substation: RED HILLS STEAM PLANTLZOP: Sturgis 161-kV line No. 1
Starting branch is found from element 6472 DIST BLNDR_INNER 6
Maximum forward load current 3000 primary ampsHighest power factor angle (deg) for forward load = 30Worst forward Load: 30.9854 Primary Ohms at 30 DegreesForward power = Sqrt(3) * Base kV/1000* Max load current /_ power factor angleForward power = 0.27885 * Max load current /_ power factor angle836.556 MVA 724.479 MW 418.278 MVAR

14
Maximum reverse load current 3000 primary ampsHighest power factor angle (deg) for reverse load = 30Worst reverse Load: 30.9854 Primary Ohms at 30 DegreesReverse power = Sqrt(3) * Base kV/1000* Max load current /_ power factor angleReverse power = 0.27885 * Max load current /_ power factor angle836.556 MVA 724.479 MW 418.278 MVAR
Settings for forward loadWorst (least) load impedance / 1.50000 = 20.6569 Primary Ohms at 30 DegreesForward load encroachment setting 20.6569Forward load encroachment angle 30
Blinder angle to R axis 85.2691 degMax Blinder R along axis 17.0346 primary ohms for forward-load restriction
Settings for reverse loadWorst (least) load impedance / 1.50000 = 20.6569 Primary Ohms at 30 DegreesReverse load encroachment setting 20.6569Reverse load encroachment angle 30
Blinder angle to R axis 85.2691 degMax Blinder R along axis 17.0346 primary ohms for reverse-load restriction
5.4 Power Swings
Double blinders with timers are used to detect power swings [1]. In case a detailed stability study isnot available, the following simple rules set the blinder positions in all relays.
A typical inner blinder setting [13 ] is 0.288 ZT, where ZT is the magnitude of the positive-sequence“system impedance”: the total of line impedance and the lowest positive-sequence source impedances atthe ends. The lowest source impedance at each end of the line is found as
(-1)*(Change in positive-sequence voltage)/ (Change in positive-sequence current).
This is evaluated for sliding faults and close-in faults with up to one line out at a time behind the endbus. The factor 0.288 is 0.5/tan(60 deg) and corresponds to a phase difference of 120 degrees or largerbetween the source EMF’s feeding the line, for which a power swing is assumed to be unstable.
The outer blinder and the timers distinguish stable or unstable power swings from three-phase faults.The outer blinder is set at
Max of (inner blinder resistance + 2 ohms, inner blinder resistance * 2.5)
For a rectangular zone, the inner reactance should be 10 per cent larger than the blocked zones, andthe outer reactance is an additional 0.1 relay ohm [14].
Power-swing blinders must not operate for load alone. If the outer blinder setting exceeds 0.66 timesthe resistance to the region of highest load, the user is warned that the setting requirements conflict.
If the balanced apparent impedance moves from the outer blinder to the inner blinder over a timeinterval longer than the set delay, a power swing is assumed; faster impedance changes are treated asthree-phase faults. One manufacturer [14] provides one timer setting for unstable swings (allowingtripping) and a longer timer setting for stable swings (to block selected zones). Another relay [13 ] usesa fixed 50 ms delay. For some relays, the user may specify whether unstable power swings should tripthe relay (if system separation is required) or should block tripping in specified zones (if systemseparation is desired on another line).

15
5.5 Directional Instantaneous Overcurrent (IOC) Elements
These elements (67N and 67Q) detect the direction and magnitude of residual and negative- sequencecurrent. They provide sensitive protection for resistive faults that are missed by the mho elements.They contain IOC pickup settings (tap 50N with 3I0 for 67N, or tap 50Q with 3I2 for 67Q) and thenegative-sequence directional elements 32Q.
The following setting rules automatically monitor all three unbalanced fault types: single-line-ground(SLG), line-line (LTL) and double-line-ground (DLG).
5.5.1 Level 1 IOC for Instantaneous Direct Tripping
Level 1 (High Set) elements 67N1 and 67Q1 are set with a safety margin of 1.3 times the maximumcurrent for a fault at the remote bus, with infeed branches outaged and with coupled lines groundedone at a time. Monitors record the maximum zero- and negative-sequence currents at the relay over allfaults with the outage contingencies chosen.
5.5.2 Level 2 IOC for Pilot Signaling and Time-Delayed Backup
Level 2 elements (67N2 and 67Q2) are backup controls for the pilot signal or time-delayed zone 2tripping. They are set as 0.5 times the minimum relay current for a 40-ohm ground fault at the remotebus. The following report presents the 3I0 and 3I2 fault currents for the four types of faults. SLGRrefers to a single-line-to-ground fault with 40-ohm fault resistance (primary ohms).
Example of Overcurrent Element Settings
*******************************************************************
Ground and Neg-Seq Overcurrent Elements for Permissive Overreach
*******************************************************************
Minimum allowed IOC pickup for all levels = 100 Primary A
Level 1 IOC Max 1.30000* Max50N1 Primary A 4881.84 6346.4050Q1 Primary A 5582.18 7256.83
Level 2 IOC: 40-ohm faults at remote bus 232
Fault 3I0 3I2
TPHR 0.0 0.0LTLR 0.0 1275.9DLGR 403.4 464.6SLGR 405.5 458.3
Level 2 IOC at RED HILLS STEAM PLANT to ACKERMAN 161-kV SUBDesired setting = 0.5 * min relay amps for 40-ohm faults at remote bus 232Level 2 IOC Min 0.50000 * Min50N2 Primary A 403.387 201.69450Q2 Primary A 458.263 229.132

16
5.5.3 Level 2 IOC Settings with Tapped Transformers
If the protected line has tapped transformers, level 2 must be increased to 1.25 times the highestcurrent due to faults on the transformer secondary. The fault study applies three-phase, phase-phaseand phase-ground faults on the secondary side; one does not need to know the transformer connection.
Example of limits due to transformers:
4 tapped transformers at bus 376; adjusting Level 2
Faults on tapped XFMRs; remote breaker closedFaults on tapped XFMRs; remote breaker open at 232
Solid faults on tapped XFMR secondariesLevel 2 IOC MAX 1.25000 * MAX50N2 Primary A 1454.83 1818.5350Q2 Primary A 2976.65 3720.81
The following table shows how the tapped transformers limit the sensitivity allowed:
Level 2 IOC elements (Primary A)
Without XFMRS With XFMRS50N2 201.69 1818.5350Q2 229.13 3720.81
5.5.4 Level 3 IOC Settings
The local level-3 reverse IOC settings (taps 50N3 and 50Q3) should have at most half of the remotelevel-2 values, to block echo signals for external faults (Figure 4). These settings are secure, since zone3 sees at least as much line current as its remote level 2 element.
6
Local Relay
1
2
IOC 67N3 IOC 67N2
F = Reach point of remote level-2overcurrent element
7
F
F
Remote Relay
Protected Line
Level 3 overcurrent element 67N3 mustsee all reverse faults at points F.
Figure 4 –––– Coordinating definite-time overcurrent elements.

17
5.6 Backup Directional Ground Time-Overcurrent (TOC) Element
Element 51N provides current-dependent time-delayed clearance of high-resistance faults along theprotected line. It provides backup protection for remote elements, and supplements zone 2 when thepilot scheme is out of service. A suitable time delay is 30 cycles for a solid fault at the remote bus and apickup setting of 0.1 times the relay current for this fault. The curve shape is chosen separately forcoordination with neighboring TOC elements. A “Very Inverse” curve is typical for a looped systemwithout fuses.
Figure 5 shows the operating times for sliding 40-ohm faults along the protected line from Red Hills toSturgis.
Figure 5 –––– Time-overcurrent characteristic with sliding 40-ohm faults. This element trips in 30 cyclesfor a close-in 40-ohm fault and 300 cycles for a 40-ohm fault on the remote bus.
5.7 Current Direction
A fault on a coupled external line can reverse the zero-sequence voltage and make the relays at bothends of the line see the fault as forward [1 , 15]. In other cases, the current direction may reverse. Thesetting algorithm reports the direction seen by the relay for:
(a) Sliding faults on the relay line with all coupled lines in service,
(b) Sliding faults on the relay line with coupled lines grounded one at a time, and

18
(c) Sliding faults on each coupled line with all lines in service.
Generic zero-sequence and negative-sequence directional elements are used to measure the direction asin reference [15]. The user is shown where the current may reverse and is warned where an externalfault appears as internal.
The following example verifies that internal faults remain as forward (F) at both ends of the line whena coupled line is grounded. The phase differences between the voltages (V) and currents (I) at the endsof the line are labeled “Arg(Right/Left)”.
Direction at end buses 109 and 232 for single-line-ground faults on line 109 376 1 to 232
Fault: SLGRelay branch 109 376 1Fault branch 109 376 1 to 232 Internal
0 seq -seq 0 seq -seqFault direction Fault direction Arg(Right/Left)
Dist Left end Right end Left end Right end V I V I1 0.25 F F F F -3.8 2.8 -0.7 3.42 0.50 F F F F -7.5 0.9 -0.7 3.13 0.75 F F F F -10.0 -0.3 -0.7 3.4
Fault: SLGLine Grounding “109 Red Hill 161” to “232 Sturgis 5” Ckt 2Relay branch 109 376 1Fault branch 109 376 1 to 232 Internal
0 seq -seq 0 seq -seqFault direction Fault direction Arg(Right/Left)
Dist Left end Right end Left end Right end V I V I1 0.25 F F F F -3.8 6.1 -1.2 5.72 0.50 F F F F -4.7 5.1 -1.3 5.73 0.75 F F F F -4.9 5.0 -1.2 5.7
The following example checks the direction measured for external faults on a coupled branch (109 232 2to 232). At least one end must see the external fault as reverse (R); otherwise a warning is shown.Normal current reversal occurs when the fault location changes on the parallel line.
External faults on coupled branches; all lines in service
Fault: SLGRelay branch 109 376 1Fault branch 109 232 2 to 232 External
0 seq -seq 0 seq -seqFault direction Fault direction Arg(Right/Left)
Dist Left end Right end Left end Right end V I V I1 0.25 R R R F -3.8 -15.6 -0.7 180.02 0.50 F R R F -7.5 172.9 -0.7 180.03 0.75 F R F R -10.0 178.3 -0.7 -180.0

19
5.8 Negative-Sequence Directional Element 32Q
This element supervises all zones for the ground distance elements (forward or reverse) and alsosupervises the phase mho elements except when a three-phase fault is detected. One type of relay [15]has a fixed pickup for the torque product
( )2 2Torque = Re V conjg (I )exp(-jMTA)
from relay negative-sequence voltage V2 and current I2. When the product is negative (for a forwardfault), the relay bit 32QF is asserted. For a reverse fault, the relay bit 32QR is asserted.
Another type [8] increases the torque limit for high fault current by measuring an impedancecomponent instead:
( ) ( )( )2 2 2Z = Re V /I exp -jMTA
The angle MTA is a tap setting, usually set equal to the +/- sequence line angle arg(ZL1). Z2 changesabruptly from a negative value for close-in forward faults to a positive value for reverse faults.Directionality is assured by computing the least negative Z2 for forward faults, and the least positive Z2
for reverse faults. Then the forward and reverse impedance pickups Z2F and Z2R are set betweenthese limits, with
Z2R Z2F + 0.5 / (rated current)≥
in secondary ohms.
The 50QF and 50QR pickups (3I2) must allow the most sensitive supervised IOC, TOC or distanceelement to operate [16]. The required minimum 3I2 values are computed from line-line, single-line, anddouble-line faults at the operating limits of the supervised elements.
The tap setting (a2) equals the least allowed magnitude of (I2/I1) for operation, to avoid operation due tountransposed lines with load current. If an unbalance factor a2 is supplied, the algorithm must warnthe user where the desired 50QF or 50QR are less than a2 * (max load current). Alternatively, 50QFand 50QR are set from the fault studies and the unbalance factor is set as:
a2 = min (50QF, 50QR) / (max load current)
This value is chosen because any larger a2 value would cause the maximum load current to raise thethreshold 3I2 above the required 50QF setting.
Example:
************************************************************************
Setting Negative-Sequence Directional Element for Permissive Overreach
************************************************************************
Substation RED HILLS STEAM PLANTMaximum load current 3000 primary amps

20
Branch impedance (pu) 0.015 @ 85 degTotal line ohms (primary) 7.54279CTR 400 VTR 1399.89Primary (network) quantities for forward faults
|Zsourcen| Re(V2/I2/_-MTA) |I2| Contingency12.4908 -12.485 3106.60 All lines in service13.4036 -13.398 2565.09 Midline fault at 0.2500014.5186 -14.512 2166.46 Midline fault at 0.5000015.9117 -15.904 1857.16 Midline fault at 0.7500017.6934 -17.683 1607.01 Midline fault at 118.3737 -18.336 2140.20 Line out 109 232 238.8598 -38.823 750.487 Line out 109 24026 1
Negative V2/I2 component of least magnitude for forward faults -12.485 primary ohms(-3.567 secondary ohms).
Primary (network) quantities for reverse faults|Zsourcen| Re(V2/I2/_-MTA) |I2| Contingency38.7379 38.6949 1001.71 All lines in service23.1619 23.1450 1697.76 Line out 109 232 238.7379 38.6949 752.850 Line out 109 24026 1
Positive V2/I2 component of least magnitude for reverse faults 23.1450 primary ohms(6.613 secondary ohms).
Default settingsRated amps 5Total line ohms 7.54279Total secondary ohms 2.15524Default Z2F = 0.5 * total secondary ohms= 1.07762Default Z2R = Z2F + 0.5/(rated amps) = 1.17762
Default values lie within required range (-3.567, 6.613) secondary ohms
Primary 3*I2 (A) 2133.70TOC_FACTOR chosen as 0.10000Primary pickup (3*I2) 213.370CTR 400Secondary pickup (3*I2) 0.53343 relay A
Settings chosen with fixed a2 and max load 3000 Aa2 (min I2/I1) 0.1000050QF & 50QR 3I2 pickup 2.25000
Alternative settings for IOC pickup and max load 3000 Aa2 (min I2/I1) 0.0237150QF & 50QR 3I2 pickup 0.53343

21
5.9 Summary of Setting Rules
Table 2 is a summary of the setting rules.
Table 2 – Summary of Rules for Distance and Overcurrent Settings
Phase DIST zone 1 80% along the protected line; all phase zones are checked for maxload.
Ground DIST zone 1 Minimum of 80% along the protected line and 80% of apparentimpedance due to mutual coupling for a remote A-G bus fault, withinfeed removed and a coupled branch grounded.
Fault detector for zone 1 0.8 times the least fault current for solid faults 80% along the line.
0.33 times the fault current for the same faults with the remote breakeropen.
Phase pickup 10% above maximum load current.
Forward pilot zone Maximum of (line ohms and largest apparent impedance for remote-bus fault) + 20% of the shortest downstream line.
Phase element limited to 66% of the apparent impedance at maximumload current and a power angle of 30 degrees.
Time-delayed zone 2 Maximum of (line ohms and largest apparent impedance for remote-bus fault) + 20% of the shortest downstream line.
Phase element limited to 66% of the apparent impedance at maximumload current and a power angle of 30 degrees.
Must not overreach a downstream zone 1.
Must not overreach the primary bus of a tapped XFMR by more than20 to 50% of the transformer reactance.
Fault detector for zone 2 Least relay current (with one source removed) for remote-bus faultswith fault resistance 40 primary ohms.
Zone 2 timer 20 cycles.
Reverse pilot zone 150% of the largest apparent impedance calculated for line-end faults(on the line-side of an open remote breaker) behind the relay.
Phase element limited to 66% of the apparent impedance due tomaximum load current from the protected line into the relay bus, with apower angle of 30 degrees.
Fault detector for reversepilot zone
Minimum setting.

22
Time-delayed forwardzone 3
1.2 times the impedance to the most distant depth-2 bus.
Phase element limited to 66% of the apparent impedance at maximumload current and a power angle of 30 degrees.
Must not overreach the primary bus of a tapped XFMR by more than80% of the transformer reactance.
Zone 3 timer 75 cycles.
Fault detector for zone 3 Minimum setting.
Zone 3 reverse offset 25% of zone 1.
Quad element resistivereach
20 primary ohms.
Load encroachmentblocking
Resistive reach of 0.66 * apparent resistance at maximum loadcurrent.
Power swing detector:
Inner blinder Resistance of 0.5/tan(60) * Abs (protected line + total sourceimpedance).
Outer blinder Max (Inner blinder * 2.5, Inner blinder + 2 secondary ohms).
Reactance reach 1.1 * largest controlled zone; outer reach 0.1 secondary ohms larger.
Level 1 IOC 1.3 times the maximum current for a fault at the remote bus with infeedbranches outaged and one coupled line grounded.
Level 2 IOC 0.5 times the relay current for a 40-ohm ground fault at the remotebus.
At most 1.25 times the highest current due to faults on the transformersecondary.
Level 3 IOC Half of the remote level-2 pickup.
Ground TOC with “VeryInverse” curve
30 cycles delay for a solid fault at the remote bus and a pickup settingof 0.1 times the relay current for this fault.
Negative-SequenceDirectional Element
Z2F = 0.5 * (secondary line ohms); Z2R = Z2F + 0.5/(rated current).
Forward and reverse pickups (3I2) allow the most sensitive supervisedelement to operate.
Min (Ineg/Ipos) tap = pickup / (max load current).

23
6. Checking the Settings
Settings must allow for fault resistance, imprecise network data, and instrument-transformer error.The operating margin defined below shows how close an operating relay is to its limit, or how close anon-operating relay is to an incorrect operation. Where the calculations involve only a single element,the fault studies are performed by the setting algorithm to warn the user of setting conflicts.
Overcurrent elements use the multiples of pickup to measure the safety margin, and the pickup tapsare computed directly from the desired margin in the fault studies above.
Distance elements are set directly from the line impedances and need additional fault studies(performed by the setting algorithm) to test for infeed and mutual coupling.
6.1 Reach Margin for Distance Elements
Here we define the reach margin in the positive-sequence line-impedance plane (Figure 6) for a solidfault on one of the protected lines as
Margin = Set reach / (Set reach + distance from boundary) [Fault beyond characteristic]
Margin = Set reach / (Set reach - distance from boundary) [Fault within characteristic]
using the shortest distance from the apparent impedance point to the boundary of the operating region.
R
X F1
F2
A
DiameterMargin =
Diameter + dist A to F1
DiameterMargin =
Diameter dist A to F2−
Fault beyond characteristic
Fault within characteristic
MTA
Mho circle
Figure 6 – Operating margins of mho distance characteristic in line impedance plane.

24
The set reach depends on the tap settings. For a quadrilateral, the reach is measured from the originto the reactance line. For a mho circle (Figure 6), the reach is the diameter. By design, this circlepasses through the set reach point at the MTA. Although the actual characteristic expands away fromthis angle, solid faults on the protected lines have apparent impedance angles within a few degrees ofthe MTA setting, so useful margin estimates for solid faults can be based on a fixed set reach. Thissimplification makes the margin calculation independent of the particular relay comparator.
The phase elements are tested for three-phase faults and the apparent impedance is computed as:
( ) ( )b c b cImpedance = V -V / I -I
where the relay phase voltages relative to local ground are (Va, Vb, Vc) and the line currents at the relayare (Ia, Ib, Ic).
For the ground elements, the apparent impedance is computed. For phase-A-ground element, theapparent impedance is:
( )a a 0 0Impedance = V / I + 3I k
where the zero-sequence compensation factor k0 is approximated by the relay tap settings.
These impedances equal the apparent positive-sequence ohms between the relay and its local zero-voltage point and therefore give the apparent fault location on the line.
Applications of the reach margins are described in the following sections.
6.1.1 Zone 1 and 2 on Protected Line
With solid faults at the end bus of the protected line, the zone 1 reach margin should be 0.8 or less. Forthe forward pilot zone or zone 2, the reach margin should exceed 1.2 for the same faults.
This check is part of the setting algorithm. The report warns that the forward pilot zone and zone 2 setas above both underreach for ground faults:
Margins for zone 1 phase (underreaching)
Line Fault Reach App P.Ohm MHO margin109 - 232 1 TPH 6.03 7.54 0.80 Underreach
Margins for zone 1 ground (underreaching)
Line Fault Reach App P.Ohm MHO margin109 - 232 1 SLG 5.73 11.52 0.50 Underreach
Margins for zone 2 (overreaching)
Line Fault Reach App P.Ohm MHO margin109 - 232 1 TPH 9.06 7.54 1.20 Overreach109 - 232 1 SLG 10.40 11.52 0.90 Underreach ** Warning **

25
Margins for forward pilot zone (overreaching)
Line Fault Reach App P.Ohm MHO margin109 - 232 1 TPH 9.06 7.54 1.20 Overreach109 - 232 1 SLG 10.40 11.52 0.90 Underreach ** Warning **
Here the automatic procedure cannot set an optimum value, and the engineer must choose compromisesettings for forward pilot operation and for time-delayed tripping. Zone 1 (phase or ground) is criticaland should already have been set to prevent overreach. To increase zone 2 to cover the line, or to relaxthe load restrictions or the tapped transformer limit, the user will change the setting factors shown inTable 1 and repeat the calculation.
6.1.2 Zone 2 Coverage of Downstream Line
For zone 2 stepped distance elements, the algorithm applies a fault at each of the downstream zone 1limits, with infeed branches removed to maximize the zone 2 reach. For a practical approximation, thedownstream zone 1 is assumed to reach 0.8 times the least apparent impedance for a solid single-line-ground fault at the end of its line. This is the same zone-1 rule as above. The parallel line in thisnetwork is treated as any other downstream line.
If the zone 2 reach margin exceeds 0.8, the fault is close to the downstream zone 1 characteristic, sothere is a risk that the local zone 2 will misoperate for faults beyond zone 1 of the downstream relay.The coordination can be maintained by increasing the local zone 2 time delay [1].
Margins for GROUND zone 2 overreach in downstream zone 1Overreaching zone of relay on 109 376 1 must not reach ends of downstream zone 1
Faults at zone 1 reach point on lines from remote bus 232
All infeed branches in service
Remote line Fault Reach App P.Ohm MHO margin
0.75 along 232 109 2 to 109 SLG 13.03 15.251 @-105 deg Rev Flt Underreach OK0.79 along 232 239 1 to 239 SLG 13.03 69.296 @ 82 deg 0.19 Underreach OK0.80 along 232 1151 1 to 36 SLG 13.03 89.135 @ 81 deg 0.15 Underreach OK0.79 along 232 1348 1 to 229 SLG 13.03 142.599 @ 82 deg 0.09 Underreach OK0.79 along 232 1348 1 to 590 SLG 13.03 83.623 @ 84 deg 0.16 Underreach OK
All infeed branches outaged
Remote line Fault Reach App P.Ohm MHO margin
0.75 along 232 109 2 to 109 SLG 13.03 13.700 @ 85 deg 0.95 Underreach *Warning*0.79 along 232 239 1 to 239 SLG 13.03 20.426 @ 83 deg 0.64 Underreach OK0.80 along 232 1151 1 to 36 SLG 13.03 29.017 @ 83 deg 0.45 Underreach OK0.79 along 232 1348 1 to 229 SLG 13.03 36.024 @ 83 deg 0.36 Underreach OK0.79 along 232 1348 1 to 590 SLG 13.03 22.622 @ 83 deg 0.58 Underreach OK
All infeed branches outaged; end breaker open
Remote line Fault Reach App P.Ohm MHO margin
0.75 along 232 109 2 to 109 SLG 13.03 10.269 @ 89 deg 1.26 Overreach **Miscoord.**0.79 along 232 239 1 to 239 SLG 13.03 20.429 @ 83 deg 0.64 Underreach OK0.80 along 232 1151 1 to 36 SLG 13.03 28.844 @ 83 deg 0.45 Underreach OK0.79 along 232 1348 1 to 229 SLG 13.03 36.039 @ 83 deg 0.36 Underreach OK0.79 along 232 1348 1 to 590 SLG 13.03 23.142 @ 84 deg 0.56 Underreach OK

26
Here we have allowed zone 2 to cover up to 50 percent of tapped-transformer reactance. In thisapplication, zone 2 is short enough to coordinate with every downstream zone 1 when all lines are inservice, but it shows a miscoordination with zone 1 along the parallel line (232-109 circuit 2) whenintermediate sources are removed and the breaker is open on the parallel line at the relay bus 109.This is acceptable when zone 2 is used for a pilot scheme.
6.1.3 Zone 3 Coverage of Depth-2 Buses
For a forward zone 3, the setting algorithm applies a fault at each bus at a depth of 2, with all branchesin use and with branches out one at a time behind the relay, to check minimum source conditions.Warnings appear in the following example because zone 3 has been limited by tapped transformers andcannot reach the depth-2 buses.
Margins for zone 3 at depth 2: all lines in service
Line Fault Reach App P.Ohm MHO margin
109 376 1 to 239 TPH 30.34 69.58 0.44 Underreach ** Warning **109 376 1 to 36 TPH 30.34 54.37 0.56 Underreach ** Warning **109 376 1 to 229 TPH 30.34 120.92 0.25 Underreach ** Warning **109 376 1 to 590 TPH 30.34 88.00 0.34 Underreach ** Warning **109 376 1 to 239 SLG 30.34 85.82 0.35 Underreach ** Warning **109 376 1 to 36 SLG 30.34 84.83 0.36 Underreach ** Warning **109 376 1 to 229 SLG 30.34 169.84 0.18 Underreach ** Warning **109 376 1 to 590 SLG 30.34 105.63 0.29 Underreach ** Warning **
6.2 Sensitivity to Ground-Fault Resistance
A plot of the largest detectable fault resistance against fault location is a convenient measure of groundelement sensitivity [16]. We fix the fault type, open chosen breakers, and compute the largest faultresistance that will trip the element at each location, again using the actual relay comparatorequations.
Figure 7 plots the maximum fault resistance that the distance and directional overcurrent elementscan detect for single-line-ground (1Ph) faults in circuit 1.

27
Gnd DIST (1Ph) Gnd IOC (1Ph) NSeq IOC (1Ph)
Open at ST Open at ST Open at ST
Max
R
Max
R
Distance/Line Distance/Line Distance/Line
Figure 7 – Threshold fault resistance (primary ohms) for zone 1 (solid lower curves) and zone 2(dashed upper). Line-end breaker open for lower plots.
Red Hills (RH) substation is at the left (Distance/Line = 0) and Sturgis (ST) is at the right. The largestresistance seen by zones 1 and 2 at Red Hills decreases with increasing distance along the line. Theregion below the zone 1 curves shows the faults in zone 1 that trip directly; Zone 1 reaches no morethan 80 percent along the line as required. The region under both zone 2 curves shows the higher faultresistances detectable by the pilot scheme. This region must cover the entire line. The “NSeq IOC”elements have been made less sensitive than the “Gnd IOC” elements, to avoid the tappedtransformers; hence the zone 1 “NSeq IOC” element at Sturgis does not operate for 1Ph faults.
A 15-ohm close-in fault at Sturgis is not seen from Red Hills because of neutral infeed from the twotapped autotransformers at Ackerman. Such faults will be cleared with zone-2 time delay (20 cycles),by the TOC element, or sequentially if the current rises enough after the breaker opens at Sturgis. Thelower plots in Figure 7 (“open at ST”) show the increased coverage in this case. The “Gnd IOC” curveflattens out for faults beyond the transformers; this is a result of the neutral infeed, which does notaffect the “NSeq IOC” element.
We exploit the automatic process by including more thorough fault studies than would be practicablemanually. For example, to set the largest allowed fault detector pickup requires about 50 faultcalculations, and setting the overcurrent elements uses about 85 fault calculations, with various linestemporarily outaged. Figure 7 required over 6000 fault calculations (under 15 minutes on a 450 MhzPC).

28
6.3 Reverse Pilot Reach
The reverse pilot zone must cover the overreach region of the forward pilot zone at the opposite end ofthe line, in order to block all echoed signals. This coordination check is made graphically from thesettings of both relays. For the worst case (maximum overreach of line 109-376-232), the tappedtransformers at bus 376 are removed.
Figure 8 shows the maximum resistance seen by the forward zones (upper half of diagram) and thereverse pilot zone of the facing relay (lower half), for single-line-ground faults around the loop ofparallel lines. Zone 1 sees only part of its protected line, as required. The overreach area of the forwardpilot zone is covered by the reverse pilot zone plotted below it.

29
Figure 8 – Threshold fault resistance (primary ohms) for SLG faults around loop of parallel lines.
The upper curves show two forward zones on Red Hills – Sturgis line 1. The lower curve shows thereverse pilot element of the facing relay on Sturgis-Red Hills line 1. The reverse element covers theforward pilot overreach region right of Sturgis.
Coverage of fault impedance is also shown in the circles in Figure 9. These circles are similar inappearance to traditional mho circles but are not to be confused with them. Each plots the largest faultimpedance seen for a single-line-ground fault at bus 232, using the full relay operating equations. Thisimpedance may be inductive, resistive, or capacitive: the algorithm searches for the limit at each fault-impedance angle in turn. The limit depends on the equivalent source impedance at the relay, andhence also varies with fault location. The forward pilot limit is well within the facing reversecharacteristic, which must enclose all external faults that the forward pilot sees.

30
109
232
-10
10
20
30
-20 -10 10 20
XP.Ohms
RP.Ohms
Figure 9 – Limits of fault impedance for single-line-ground faults at remote bus 232: for forward pilotrelay at 109 facing the reverse pilot relay at 232. The forward element (smaller circle) barelyoperates for a solid fault at bus 232. The reverse element (larger circle) will operate for a 12-ohmresistive bus fault at bus 232. Both elements see capacitive fault impedance of about –j10 ohms atbus 232.
12 Ohms

31
Table 3 summarizes the extra checking rules. Again, these apply to any pilot scheme using phasordistance relays. If these tests produce warnings, the user must use judgment in finding a compromisesetting.
Table 3
Summary of Extra Checking Rules
Distance zone 1 Reach margin < 0.8 for line-end solid faults on theprotected line or on a coupled line.
Forward pilot zone and time-delayeddistance zone 2
Reach margin > 1.2 for line-end solid faults.
Reach margin < 0.8 for faults at downstream zone 1 limitswith infeed branches outaged.
Time-delayed forward distance zone 3 Reach margin > 1.2 for solid faults at a depth of 2 buses.
Reverse distance pilot zone Cover the overreach region of the forward pilot zone at theopposite end of the line. Plot the fault impedance limits inthe line-impedance plane.
Distance and overcurrent zones 1and 2
Plot the largest detectable fault resistance for sliding faultson the protected line.
Directional overcurrent Confirm that internal faults on the protected line aremeasured as forward at both ends, with coupled branchesoutaged or grounded.
Confirm that external faults on coupled lines are measuredas reverse at one or both ends of the protected line.
7. System Simulation
After setting the relay, the engineer can test its operation in the network. The stepped eventsimulation uses detailed phasor models of the relays, including the TOC curves and distance- elementcomparators, and accounts for the logic of multiple relays in the scheme. It verifies that the primaryprotection can successfully clear faults on the protected line, and that other relays will not operateunintentionally.
Figure 1 shows a close-in solid single-line fault at Sturgis for which the zone 2 ground element at RedHills does not operate. The 67N2 pilot element at Red Hills trips on receiving the permissive signal.The following events are reproduced:
Event Cycles from start
Close-in fault at Sturgis 0.0Zones 1 and 2 assert at Sturgis 1.0161 kV breaker starts to open at Sturgis 1.0

32
Transmission to Red Hills 1.0Signal received at Red Hills 1.267N2 asserts at Red Hills 1.2 (includes 0.2 cycles for
torque control element)161 kV breaker starts to open at Red Hills 1.2Breaker opens at Sturgis 4.0Breaker opens at Red Hills 4.2
The total time has about 0.5 cycle of random error, since the prefault voltage angle at the instant of thefault is unknown in a phasor model.
Figure 10 simulates a single-line fault with fault resistance of 6 ohms.
(2)
(1) (1)
161_BU_GND
Z3GD,51N248.000
Z2G,ECHO_RECEIVER,6
10.400
LFZP_TOC651.600
51N22.500
Z1G4.000
LFZP_TZ3No_Op
LFZP_TZ3
No_Op
Not trippedNo_Op
161_BU_GND
118.900
MDAR_TOC190.800
G
161.0 kV109 Red Hill 161
161.0 kV
229 Calhn City 5161.0 kV
231 Eupora, MS 5
161.0 kV232 Sturgis 5
161.0 kV239 Louisvi SS 5
161.0 kV
376 Ackerman 161
69.0 kV
595 Ackrmn 69-1
161.0 kV1151 Adaton 5
161.0 kV1159 Starkvile T2
161.0 kV
1348 Maben Tap 5
69.0 kV
2446 Sturgis 3
69.0 kV9409 Ackrmn 69-2
20.0 kV24026 Red Hill U1S
EE C
Figure 10 – Delayed tripping at Red Hills for 6-ohm ground fault. This fault is outside the reach ofzone 2 at Red Hills until the breaker opens at Sturgis.
It has already been shown that the zone 2 mho and IOC elements may both underreach in this case, sothe pilot zone at Red Hills sees the fault only after the breaker has opened at Sturgis. The followingevents are reproduced:
Event Cycles from start
Close-in fault at Sturgis 0.0Zone 1 tripping at Sturgis 1.0161 kV breaker opens at Sturgis 4.0Zone 2 sequential tripping at Red Hills 5.0Transmission to Sturgis 5.0Signal received at Sturgis 5.2Echo transmission to Red Hills 7.2Echo received at Red Hills 7.4161 kV breaker opens at Red Hills 10.4
In a systematic search for miscoordinations, the engineer can run many different faults. A typicalseries of stepped-event simulations varies the fault resistance for close-in and midline single-line-ground faults on the protected line:

33
Protected line: local branch 232 376 circuit 1 to remote bus 109
Fault type Location
Single-line-ground (SLG) Close-in at 232Single-line-ground Close-in at 109Single-line-ground 0.5 from 232 376 1 to 109
SLG - 2 Ohms Close-in at 232SLG - 2 Ohms Close-in at 109SLG - 2 Ohms 0.5 from 232 376 1 to 109
SLG - 6 Ohms Close-in at 232SLG - 6 Ohms Close-in at 109SLG - 6 Ohms 0.5 from 232 376 1 to 109
SLG - 10 Ohms Close-in at 232SLG - 10 Ohms Close-in at 109SLG - 10 Ohms 0.5 from 232 376 1 to 109
SLG - 20 Ohms Close-in at 232SLG - 20 Ohms Close-in at 109SLG - 20 Ohms 0.5 from 232 376 1 to 109
SLG - 40 Ohms Close-in at 232SLG - 40 Ohms Close-in at 109SLG - 40 Ohms 0.5 from 232 376 1 to 109
The simulation evaluates the time delay between the fastest primary and fastest backup local zones ofprotection, reports any miscoordinations or time intervals below the chosen minimum, and continueswith the next fault. On line 2 it is found that faults up to 60 ohms are cleared in 4.4 cycles when thebreakers open simultaneously at both ends. However, on line 1 the instantaneous overcurrent settingshave been limited by the tapped transformers, and the result is that tripping for 20-ohm faults on line 1requires 25 cycles using the time-overcurrent elements.
8. Summary
Automated setting of complex modern relays improves productivity by applying utility rulesconsistently, simplifying routine data-handling and avoiding human error. Fast computers can runmore thorough fault studies than those previously conducted manually. The algorithms presented herecalculate the electrical settings for multiple overcurrent and distance elements and report the marginsof secure operation. They apply to any directional comparison pilot scheme and to any relay model.The settings are verified graphically and in a system simulation that includes the pilot logic.
References
[1] “IEEE Guide for Protective Relay Applications to Transmission Lines,” IEEE Standard C37.113-1999, Institute of Electrical and Electronics Engineers, New York, NY, February 2000.

34
[2] Fernando L. Alvarado, Sao Khai Mong, and Mark K. Enns, “A Fault Program with Macros,Monitors, and Direct Compensation in Mutual Groups,” IEEE Transactions on Power Apparatus andSystems, vol. PAS-104, No. 5, pp. 1109-1120; May 1985.
[3]. Paul F. McGuire, Donald M. MacGregor, John J. Quada, and Daryl B. Coleman, “A Stepped-EventTechnique for Simulating Protection System Response,” presented at 6th Technical Seminar onProtection and Control, Natal, Brazil; September 27 - October 2, 1998.
[4] A. T. Giuliante, S. P. Turner, and J. E. McConnell, “Considerations for the Design and Applicationof Ground Distance Relays,” 22nd Annual Western Protective Relay Conference, Spokane, Washington;October 1995.
[5] Mark K. Enns and Paul F. McGuire, “Data Base Organization for Protection Engineering,” CIGREStudy Committee 34 Colloquium, Johannesburg, South Africa, October 1-3, 1997.
[6]. Donald M. MacGregor and Hugh Borland, “Computer-Aided Setting and Coordination of DistanceRelays in 38 kV Distribution Networks,” 13th International Conference on Electricity Distribution(CIRED 1995), Brussels, Belgium; May 1995.
[7]. George E. Alexander and Joe G. Andrichak, “Ground Distance Relaying: Problems and Principles,”47th Annual Georgia Tech Protective Relaying Conference, Atlanta, Georgia; April 28-30, 1993.Protective Relay Conference, Spokane, Washington; October 24-26, 2000.
[8]. E. O. Schweitzer III and Jeff Roberts, “Distance Relay Element Design,” 46th Annual Conferencefor Protective Relay Engineers, Texas A&M University, College Station, Texas; April 12-14, 1993.
[9] S. E. Zocholl, “Three-Phase Circuit Analysis and the Mysterious k0 Factor,” 22nd Annual WesternProtective Relay Conference, Spokane, Washington; October 1995.
[10] “Transmission Line Protective Systems Loadability,” report by the IEEE Power System RelayingCommittee Working Group D6, presented at 28th Annual Western Protective Relay Conference,Spokane, Washington; October 23-35, 2001.
[11] Solveig Ward, “Comparison of Quadrilateral and Mho Distance Characteristic,” 26th AnnualWestern Protective Relay Conference, Spokane, Washington; October 1999.
[12] Walter A. Elmore, Fernando Calero and Lifeng Yang, “Evolution of Distance Relaying Principles,”48th Annual Conference for Protective Relay Engineers, Texas A&M University, College Station,Texas; April 3-5, 1995.
[13 ] “REL 512 Line Protection and Breaker Control Terminal,” manual I.L.40-512, ABB PowerAutomation and Protection Division, Coral Springs, FL; July 2001.
[14] Daqing Hou, Shaojun Chen and Steve Turner, “SEL-321-5 Relay Out-of-Step Logic,” ApplicationGuide AG97-13, Schweitzer Engineering Laboratories, Inc.; 1997.
[15] Walter A. Elmore and Elmo Price, “Polarization Fundamentals,” 27th Annual Western ProtectiveRelay Conference, Spokane, Washington; October 24-26, 2000.
[16] Jeff Roberts, E. O. Schweitzer III, Renu Arora, and Ernie Poggi, “Limits to the Sensitivity ofGround Directional & Distance Protection,” 22nd Annual Western Protective Relay Conference,Spokane, Washington; October 24-26, 1995.

35
A.T. Giuliante is president and founder of ATG Exodus. Prior to forming his company in 1995, Tonywas Executive Vice President of GEC ALSTHOM T&D Inc.- Protection and Control Division, which hestarted in 1983. From 1967 to 1983, he was employed by General Electric and ASEA. In 1994, Tonywas elected a Fellow of IEEE for “contributions to protective relaying education and their analysis inoperational environments.” He has authored over 40 technical papers and is a frequent lecturer on allaspects of protective relaying, including electromechanical, solid state and digital based equipment.Tony is a past Chairman of the IEEE Power System Relaying Committee 1993-1994, and pastChairman of the Relay Practices Subcommittee. He has degrees of BSEE and MSEE from DrexelUniversity 1967 and 1969.
Donald M. MacGregor is a Lead Engineer at Electrocon International, Inc. He received his B.A. degreewith Honors in mathematics in 1970, from St. Catharine’s College, Cambridge, England. He nextattended University College of North Wales in Bangor, where he earned his Ph.D. in ElectronicEngineering in 1973. He joined Electrocon in 1973 and has made significant contributions to softwarefor fault analysis, the modeling of power transformers, and power system protection, including detailedmodels of multifunction relays.
Russell W. Patterson is a Project Specialist, System Protection, for the Tennessee Valley Authority(TVA) in Chattanooga, Tennessee. He is responsible for reviewing and making protective relayingrecommendations on new construction and retrofit projects for the generation and transmission system.He also has responsibility for protective relaying and control systems and field support. Prior to hisposition as Project Specialist, he was TVA’s Power Quality Manager responsible for field and customersupport on PQ related issues and disturbances. Mr. Patterson earned the BSEE degree fromMississippi State University in 1991 and has completed all coursework toward the MSEE atMississippi State University. He is a registered professional engineer in the State of Tennessee.