Embed Size (px)
Citation preview

8/6/2019 Assembly System
http://slidepdf.com/reader/full/assembly-system 1/16
Optimal Inventory Policies for Assembly Systems under Random Demands
Author(s): Kaj RoslingSource: Operations Research, Vol. 37, No. 4 (Jul. - Aug., 1989), pp. 565-579Published by: INFORMSStable URL: http://www.jstor.org/stable/171257 .
Accessed: 12/05/2011 10:50
Your use of the JSTOR archive indicates your acceptance of JSTOR's Terms and Conditions of Use, available at .http://www.jstor.org/page/info/about/policies/terms.jsp. JSTOR's Terms and Conditions of Use provides, in part, that unless
you have obtained prior permission, you may not download an entire issue of a journal or multiple copies of articles, and you
may use content in the JSTOR archive only for your personal, non-commercial use.
Please contact the publisher regarding any further use of this work. Publisher contact information may be obtained at .http://www.jstor.org/action/showPublisher?publisherCode=informs. .
Each copy of any part of a JSTOR transmission must contain the same copyright notice that appears on the screen or printed
page of such transmission.
JSTOR is a not-for-profit service that helps scholars, researchers, and students discover, use, and build upon a wide range of
content in a trusted digital archive. We use information technology and tools to increase productivity and facilitate new forms
of scholarship. For more information about JSTOR, please contact [email protected].
INFORMS is collaborating with JSTOR to digitize, preserve and extend access to Operations Research.

8/6/2019 Assembly System
http://slidepdf.com/reader/full/assembly-system 2/16
OPTIMAL NVENTORY OLICIESFOR ASSEMBLYSYSTEMSUNDER RANDOMDEMANDS
KAJ ROSLINGLinkoping Institute of Technology, Linkoping, Sweden
(Received March 1987; revision received December 1987; accepted April 1988)
This paper considers an inventory model of an assembly system with random demands and proportional costs of
production and stock holding activities. The model is a generalization of the facilities in series model of Clark and Scarf.
Under an assumption on the initial stock levels that in any case should appear in the long run (Long-Run Balance), it is
demonstrated that the assembly system can be remodeled as a series system. Hence, simple reorder policies are optimal
and the computational requirements are drastically reduced. Simple approximate policies are suggested for the generally
short period of time when systems might be out of long-run balance. There is some discussion of extensions.
T his paper examines a periodic review, infinite
horizon model of an assembly inventory system
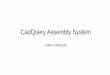
with proportionalcosts of production. In an assemblysystem, a number of components acquired from out-
side vendorsareassembled, typicallyin several stages,into subassembliesand then, finally, into a single end
product. A generic system is depicted in Figure 1. In
each period, production orders are made for all items.The ordered amounts are available after a fixed lead-
time, and are then held in stock until assembled into
other items or demanded by customers.The randomcustomer demands occur only for the end productand unsatisfied demands arebacklogged.
The present model is a direct generalization of the
initial work on multiechelon inventory theory due to
Clarkand Scarf (1960). They found an efficient wayto compute an optimal ordering policy for a pureseries system and suggested an approximate way to
handle distributivesystems, i.e., systems wherea cen-
traldepot serves severalretailers.Fukuda (1961) gen-eralized the approachto allow for disposal of stocks.
The work of Clark and Scarf was computationally
streamlined and generalized to the stationaryinfinitehorizon case by Federgruen and Zipkin (1984).Rosling (1989) derived bounds on the optimal reorderlevels. A similarseries model under continuous reviewhas been investigated by Axsater and Lundell (1984).
General multilocation inventory problems withproportional costs have been studied by Bessler andVeinott (1966) and Karmarkar(1981, 1987). They
obtained simple form optimal policies under the
restrictive assumption that all lead-times equal zero.Schmidt and Nahmias (1985) investigated a finite
horizon model of two components assembled into a
single end product. They derived a complicated opti-
mal policy under general assumptions on lead-timesand initial stock levels.
In the present paper,we derive optimal policies for
general assembly systems under a restriction on the
initial stock levels. Our interest is limited to those
stock levels that can prevail n the long run for systems
run by optimal or otherwise reasonable policies.
Under this initial condition, it turns out that the
assembly system can be interpretedas a seriessystem,and hence, there is a simple optimal policy that can
be calculatedconveniently by Clarkand Scarf's (1960)
approach.This result contrastsmost encouragingly o
the computational intractabilityof a generallyoptimal
policy.The assumed absence of setup costs in production
limits the applicability of the present model. The
inclusion of such costs in stochastic multiechelon
inventory models is extremely difficult, however.
Clark and Scarf (1962) attempted to include setup
costs in their series model, but they were only able to
derive upper and lower bounds on the minimal cost.Their approachwas extendedto distributivestructures
by Hochstadter(1970) and Rosling (1977). As far as
we know, therehas been no substantialcomputationaltest of this approximateapproach.Otherapproximate
approaches,possiblybettertested,have been proposede.g., by de Bodt and Graves (1985) for a seriessystemand by Carlson and Yano (1986) for a two-level
assembly system, but the problem is still far from a
satisfactory theoretical and practical solution. Al-
though the presentmodel includes no setup costs, we
Subject classifications: Inventory/production: long-run inventory position; component ordering and product assembly. Programming, nonlinear theory:
multistage production assembly.
Operations Research 0030-364X/89/3704-0565 $01.25Vol. 37, No. 4, July-August 1989 565 ? 1989 Operations Research Society of America

8/6/2019 Assembly System
http://slidepdf.com/reader/full/assembly-system 3/16
566 / ROSLING
CD,7 Z4=2 z 33usoeoutside 4 3 Customersupply ) ~(9----- ,,1 > demands
lead-time2s=4
21
Figure1. An assembly system.
hope that our results shed some light on this more
complicated problem.The remainder of this paper is organized as follows.
In Section 1, the model is presented.In Section 2, thelong-run analysis of the inventory levelsis carriedout,
and in Section 3 the series interpretationis demon-strated. The analysis of these sections relies on the
assumptionthat all echelon
holdingcosts are
positive.The interestingcasewheresome echelon holdingcosts
are nonpositive is handled in Section 4. In Sections 3and 4, suggestionsaregiven for applying approximate
policieswhen the long-runconditions are not satisfiedinitially. In Section 5, extensions and generalizationsin various directions and to systems with setup costsin production are discussed.Therearetwo appendices.
The first presents some alternativebut equivalent cost
assumptions. The second contains proofs that are
omitted from the main text.
1. THE MODEL
There are N items (components, subassemblies atdifferentlevels, the end item). They are denoted i =
1, 2, . .. N. Item 1 is the end item. Each nonend itemhas exactly one successor item so that the productnetwork formsa tree rooted in the end item. The units
are defined so that exactly one unit of each item is
required for the end item. The following parametersdescribe the system:
s(i) = the unique immediateuccessor of item i = I,2, . . . N; for notational convenience we defines(l) = 0;
A(i) = the set of all successors of item i;P(i) = the set of immediate predecessors of item i =
0, 1, . .. a N;
B(i) = the set of all predecessorsof item i;1,= numberof periods (lead-time)for assembly (or
delivery) of item i.
Everything occurs at the beginning of periods andin the following order. First, outstanding orders forpurchaseand assemblyarriveand new orderingdeci-
sions aremade. Then, old backlogsareexpeditedand,thereafter,customerdemands occur for the end prod-uct. Finally, but still at the beginning of the period,costsare incurred forbacklogand leftover nventories.Holdingcosts arechargedwhen items are in stock butalso when they are in assembly into their successoritem. The following variables areused:
= demands in period t for the end item;demands of different periods are iden-tically and independently distributed,f 0;
/(*), 4(.) = density and distributionfunction for (,;X= E(Q,), he expected value of (,, X> 0;
Xi,= echelon inventory position of item i inperiod t before ordering decisions aremade (= inventory on hand includingallunits already assembledinto otheritems,+ units in assemblyor on order backlogof the end item);
Yi,= echelon inventory position of item i afterproduction decisions are made, Yi,> Xi,;X',= echelon inventory on hand of item i
in period t before ordering decisionsare made but after assembles arrive =
Yi,_,,- J-k-,j Jk. (Throughout this paper,it is assumed that a sum, ',, equalszeroif a > b.) Note that XI, > Y,;, f i E P(k)and if 1,=O then X, = YI,.
Although the demand distributions are assumed tobe stationary, this assumption is of little consequencefor the main results of the next sections. The amount
(Y,, - X,,) is orderedfor the purchaseor assembly ofitem i in period t. It arrivesafter 1iperiods. The costof running the system is determinedby the followingparameters:
Hi = unit installation holding cost per period ofitem i;
hi = unit echelon holding cost per period of item i,
hi,=H -ZkEP(i,H,k;

8/6/2019 Assembly System
http://slidepdf.com/reader/full/assembly-system 4/16
Optimal InventoryPolicies for Assembly Systems / 567
p = unit backloggingcost per periodof the end item;a = period discount factor, 0 < a < 1.
The values of the cost coefficients are restricted
further n Sections 3 and 4 (the Assumption and the
Generalized Assumption, respectively). There is no
explicit proportional cost of production (or purchase).Appendix A demonstrates that such costs as well as
several other variations of the cost assumptions
can be handled by modifications of the presentcoefficients.
Holding costs are proportionalto installation stockon hand and in assembly into the succeeding item,i.e., to (X',-,) -(XI,),- ,) for i - 2. Total cost in
period t given , is thus
N
i Hj(X'j,I-XI
+ H, *Max(0,X', - ,)+ p *Max(0,(,X',)A'
- hi (X'j- 1) (p + HI) . Max(O, ,-X',)
since Max(0, a) = a + Max(0, -a) and hi = Hi -
ZEkP(i) H,. This reformulation into echelon holdingcosts is similar to Federgruen and Zipkin and is of
critical importance for the subsequent application of
Clark and Scarf's (1960) computational approach.The linearity of the original holdingcosts is apparentlynecessary for its validity. It still works, however, if a
shortage cost, nonlinear in the amount backlogged, s
added to the costs above (cf. Appendix A3).Recallingthat X,+, - +l = Y,- > , the total
expected (E) cost over the infinite horizon can bewritten as
E aE'-' aE '[h1(Y11 X[11 1])]
a "/(p+ HI) X (- Y, 1,O+ ) d() (1)
where fb+(.) is the convolution of k(.) over (1, + 1)
periods. In (1), the present value of the holding costsincurred for item i in period t + 1i s accounted for in
period t, and similarly,the present value of the costsof backlogging in period t + 1, is accounted for in
period t. Consequently, uncontrollable costs due tohistorical decisions are neglected.
For the sequential developments, it is convenient tobreak out from (1) (and sometimes neglect) the con-stant X - [1,+ 1].When this is done, the problemmaybe statedas findingdecisions Yj,,dependenton systemhistory up to period t, that solve problem P.
Problem P
Min E{ a-' al( 1'* hi. Yi,+ ac'(p+ HI)
(t - Y,)k/'+(Q)t)} + constant (2)
such that
x, < Y1i Xl;, for all k E P(i) and all i, t (3)
where
iS=I-Ik
and
Xj,-=Yi,_,-41-l
*= an optimal solution to problem P.
In the case wherea = 1, the average cost per periodis minimized instead of the total discountedcost. Theaveragecost is constructed by multiplying(2) with thediscountrate (1 - a)/a whereaftera -> 1. The lastconstant in (2) (and its average cost analog) equals
A'
-Ehi. X. (i +1)a"i/(1- a) if a <1
N
- hi * X(li+ 1) if a = 1. (4)
2. THE LONG-RUNINVENTORYPOSITION
We need the followingadditionalnotation.
M= total lead-time for item i and all its successors;M,, = 0 and M, i; + XkE() i, for i =
1 2, ... N.
Thus, M, = 11.The items are supposedto be indexed so that
M, a M, for all i and
k< i for all kEA(i).
L= equivalent lead-time for item i
Li = Mi - Mi-
Note that L, = 11 and i >, Li a 0 for i = 1,2, ... N.
X = echelon inventory position of item i in periodt orderedLi periodsago or earlier
I -l
- that- E iL=.
Note thatX~',--Yj,if L,= O.

8/6/2019 Assembly System
http://slidepdf.com/reader/full/assembly-system 5/16
568 / ROSLING
To further clarify the meaning of Xi,, if Z,j, =
order for item i placedj periods ago (i.e., in
period t - j) then
l -I
X', = x', + E j>.j=1.,
- echelon inventory position of item i in periodt ordered M,-, = s periods ago or earlier =
Y,- s _,k= s = 0, 1, .. . , Mi. Note that
it i
it Xk' fork E B(i) [by (3)]
Xi,1'-8 Yi, for,= M,
iAt-8= Xj, forA = M,-I
t= it for, = M_
t= i' for =Mi).
For a given value of ,u both X-'"- and XA'-",k > ibound what is available of the end product within ,utime periods. Thus, they are equally close to the end
item (and the customers), so to speak.Our intended series interpretation requiresthat the
inventory position of the assembly system be in a
certainstate called long-run balance.
Definition (Long-Run Balance)
The assembly system (its inventory position) is in
long-run balance in period t if and only if for i =
1, 2...,5N- I
XA,' X$~ for -0, 1, ..., AMi 1. (5)
Thus, in long-run balance the inventory positions
equallyclose to the end item increasewith i, i.e., withtotal lead-time.
We will demonstrate that optimal policies (among
others) eventually lead the system into long-run bal-
ance and then keep it there. To do this, we restrict hevalues of the cost coefflcients as follows.
Assumption
(i) hi>0 forall iA'
(ii) E - atlu) < p + H,.
The Assumption implies that p > 0. For the averagecost case (a = 1), it states that all echelon holdingcosts as well as the penaltycost arepositive.Discount-ing in ii is intuitivelydue to the fact thatholding costsarechargedfor item i immediatelyafterassembly, i.e.,
MAl)periods ahead of the earliest possible period in
which it might be sold to a customer (as part of theend product).
Lemma 1. If theAssumptionholds, then or any opti-mal policy for all i and t
Y*= XI ifXi, Min XA,"ik>i
Xi, -, Y* Mi'nX,' if Xi, Min X,-. (6)k;>i k>ij
The proof is in Appendix B. The intuitive messageof
Lemma 1 is illuminating. Since X'-Yi is an upperbound on what possiblycan be made availableof theend product within M, periods of time, then it servesno purpose to produce item i < k in excess of Xk'i.
Such a policy incurs only additional holding costs tothe contrary and, therefore, cannot be optimal. (Itactually suffices to take the minimum of Lemma 1over
Ik> i, k 4 B(I)/Msj) < Mi}. This is so since
X11,-'"i X,,'l/i for all kby definition if I E B(k).)
Lemma 2. If the Assumptionholds thenfor any opti-mal policy, for all i and t
Y* >- Min(O, Min X, i). (7)
An optimalpolicy thus satisfies (on a first-come first-served basis) all customer demands within at most
M, + 1periods of time.
Lemma 2 is proved under more general assump-tions in Appendix B. The assertion is similar to thewell known propertyof the single-itemproblem that
Y* > 0. The only difference is that in the presentcontext there is no reason to produce item i in excessof Xk'jj1',k > i, as noted in Lemma 1. The laststatement of Lemma 2 is similar to the obvious factthat no demand can be backlogged for more thanI+ 1periodsin the single-item model when the order-up-to level is nonnegative.
Theorem 1 (Realization of Long-Run Balance). Anypolicy that satisfies the inequalitiesof Lemmas 1 and2 willeventually ead thesystem into long-runbalanceand keep it there. This will happen no later than MN
+ 1periods aftertheperiodwhen accumulateddemandexceedsMax, Xi,.
Proof. Consider any item i < N. Suppose that periodq(i) is the firstperiod in which there is production ofitem i. By Lemma 1 Y,, S X'i+,,,,and since
,A+ I=Y - < A 1 (- ~t(
v -llit/I I _= x l< j+ l. izt - Aj+ l
(1+ l

8/6/2019 Assembly System
http://slidepdf.com/reader/full/assembly-system 6/16
OptimalInventoryPolicies for Assembly Systems / 569
also Yi,+I < X'+I+. Repeating this argumentshows thatY,, < Xj'+ for all t - q(i). Moreover, for0 S , M, and t = q(i) + M, -
,-,
- Yiq
Xr
,-,vl. _v _Val-p
< Xfi+iI - > - l
Thus, (5) of the Definition holds for i for all t > q +
M,, and we are done if q(i) < ti _ s + MN - M, + 1for all i, where s is the period when accumulateddemand exceeds Maxi Xi,. This is demonstrated byan inductive argument. Assume that Y,,,3-X'_,+1 i,and q(i) < t, forall i > k. Consideritem k and supposethat y,;,,< X,k=,72 tr This must hold if q(k)> tk since
X- +, < 0. Now
X-1 =-; s+1 ,<k
Ik-I lIk-I
< - Yi, ilk
for all i > k. Since X/,k <0, Lemma 2 implies produc-tion of k with YkIk
-
-= f (,, and consequently,q < tl,. Thus, these inequalities hold for all i > k - 1.The inductive assumption holds for N since tA =
s + 1, X,1,+, < 0 and so, by Lemma 2, YN.+ >- 0.Thus the assumption holds for all i. The assertionfollowsbecauseaccumulateddemand must eventually
exceed any bound as X> 0.
Note that all optimal policies realize long-run bal-ance if the Assumption holds.
The expected time periods until accumulated de-mand exceeds Maxi Xi, is greaterthan Maxi Xi,/ X,but for largevalues of MaxiXi, this is a fairlyaccurateestimate.In a well run system,one expectsXi, to equalthe expected demand over the total lead-time, MA,plus some safety stock. One should, of course, expectsuch a system to be in long-runbalancebut even if itis not, then it can hardly take more than 3(MN+ 1)time periods, say, until it is. Still, the bound of the
theorem is presumablynot very sharp.The modest requirements on a policy to lead the
system into long-run balance can be relaxed furtheras noted in the following corollary. Its proof is con-tained basically in the proof of Theorem 1 and isthereforeomitted.
Corollary 1. Theorem 1 still holds if Mink;>i2'k1 isreplacedbyX , in the inequality of Lemma 1.
In so far as there exist real-life assemblysystems thatliterally satisfy the presentmodel, it would be surpris-ing to find them out of long-run balance.
3. THE EQUIVALENT ERIES SYSTEM
The series interpretationrelies on the assumption thatthe assembly system is in long-run balance from thevery first period. The interpretationof the definitionof long-runbalance when appliedto the initial inven-tory position is investigated at the end of this sectionin Corollary4.
Theorem 2 (The Equivalent Series System). If theAssumptionholds and the assembly system is initiallyin long-run balance, then the optimal policies of theassemblysystemareequivalent o thoseof a pureseriessystem whereitem i immediatelysucceeds item i + 1
and where the lead-time of item i is Li. The costcoefficient p + H1) of the series system is the same asfor the assembly system, but the holding cost coeffi-cients are modifiedso that hi i hi Jai for all i.
Proof. The cost function (2) can be writtenas
Mm (I X
Min El ael-I * ato' i * (hiaeli-Li)Yi1
+ a,'X . (p + HI) ( - Y1}iKv+G()S)}
+ constant.
This verifies the modified cost coefficients. Since thesystem is in long-run balance, and will remain sounder any optimal policy by Theorem 1, X,, =
XiDwI-i\i+ < X jA'lMj+lxA i Xl;, for all
i, t and k E P(i). Because of Lemma 1, (3) thus maybe replacedby X,, Y < Xj',,. ProblemP is restatedas a seriessystem of the asserted kind.
The constant (4) is unaffected by the series re-formulation, and therefore, is calculated in terms ofthe originalcost coefficients.
Corollary 2. Under the assumptions of Theorem 2,thereexist numbersSi, i = 1, 2, . .. N, such that thefollowing order-up-to olicy is optimalfor all i and t
Y*= Min(S, X'? ) if Xi, Si
Y*l = Xi, if Xi,>.s S.
Thenumbers,S,, are convenientlyobtainedby solvingthe series system of Theorem2 by Clark and Scarf's(1960) procedure.

8/6/2019 Assembly System
http://slidepdf.com/reader/full/assembly-system 7/16
570 / ROSLING
Proof. Federgruenand Zipkin developed Clark and
Scarf's procedurefor a two-level series system to the
stationary infinite horizon case for h,, h2,p > 0 and0 < a < 1. The optimal policy is of the stated kind.Their proof generalizes directly to the N-level case
provided that our Assumption holds.
In the present context, Clark and Scarf'sprocedure
for obtaining Si, i = 1, 2, ... N, may be defined as
Gi(Si) = Min Gi(Y) (8)y
where
GI(Y)= h Y+ (p + HI) (Q Y)0i'`(t) dt (9)
and
Gi(Y)= hiY
+ 'i-l'ri' , (Min[Si-1, Y- p)kL() dt
for i > 1. (1O)
k'(J) and 0 +1(-) are the convolutions of 0(-) overthe Li and Li + 1 periods, respectively.
G,\ S, ) plus the constant (4) is the minimal averagecost per period for the assembly system when a = 1.
The numbers, Si, obtained from (8)-(10) do not
necessarily satisfy Si+, > Si for all i, but since Yi, <
Si+,, there is no loss of optimality in modify-
ing the numbers by letting Si -- Min[Si+,, S] fori = N- 1, N- 2, ..., 1. Thereafter,SI+ S, > 0for all i.
The results of Theorem 2 and its corollary are
critically dependent on the assumptionthat the initial
inventorylevels are in long-runbalance. If item i - 1
is seriously overstocked but item i is not, then it is
generally advantageousto have Yi,> Si, and so, the
order-up-to policy will not be optimal. The compli-cated, generally optimal policy was derived bySchmidt and Nahmias (1985) for a two-level systemwith three items (summarizedin their Figure 3). This
policy seems to force the system more rapidly into
balance than the order-up-to policy of Corollary 2,but the actual differencein costs is not known. There-
fore, it might be that the order-up-to policy is an
excellent approximation when the system is out of
balance.To ascertain easibility,the order-up-topolicyis modified so that
Yi,= Min(Si, MinmI-A') if Xi, S Si (11)
and
Yil = Xi, forX,I>, S,. (12)
By this modification, the approximate policy does notviolate the inequalities for an optimal one given by
Lemmas 1 and 2, and it will eventually coincide withan optimal policy.
With arguments similar to those in the proof of
Theorem 1, it is straightforward o demonstrate thatifXi,< Sifor all i (hereSi Si,+,), hen the approximatepolicy will lead the system into long-run balancewithin MA,+ 1 periods. Moreover, in the next periodaccumulated demand exceeds Max1(X, - Si), and wehaveX1, Si forall i. Thus, unless there is veryserious
overstocking,it will not take very long until the ap-proximate policy becomes optimal.
When the equivalent series system is constructed,
there is a useful observationto be made. It is statedin
the following corollary.
Corollary3. If Li = 0 for some i > 2 then there are
optimal order-up-to evels such that Si = Si-,. Items iand i - 1thereforemay be aggregatedwhen the order-
up-to levels are computed.The lead-timeof the aggre-gated item is thenLi-, and the holdingcost coefficientis hi-, + hia-'-i'. Here it is assumed that hi and hi-are modifiedaccordingto Theorem2.
Proof. The order-up-to levels are independent of theinitial stock levels, and hence, we may assume that
Xl,;?
SI,for all k. So, X,, < S, for all k and t by
Corollary2. Note that Li = 0 implies that X' = Yj,.Thus, Y1-,,,= Min(S_, YJ,)but then, by the same
argumentsused in the proof of Lemma 1, it cannotbe optimal to have Yi,> Si-,. So, S, = Si-, and Yi,=
Yi1 , for all t. Since i > 2, the cost (2) for the seriessystem, relatedto Yi, s
atl-I *a'i * hj* Yj,-='-'- hj* Yj_1, since Li=0.
The total holding costs relatedto Yi1, is then
a-(hi, * Yi 1, + aLi- * hi- Yi- ,)
= a -1I al'j-l . * (hi-, + hi*
Since Yi,= Yi,, the two sets of constraints(3)
Yi_,^ = Y,, and Y,, < X'+,I
can be replacedby Y,1 ' Xf,?,. Thus, the conclusionfollows.
Once, again, constant (4) is unaffected. The proposedaggregationis not literally possible to implement indecision makinguntil both Xi, < Si-, andXi,., ? Si-,.

8/6/2019 Assembly System
http://slidepdf.com/reader/full/assembly-system 8/16
Optimal InventoryPolicies for Assembly Systems / 571
Furtherdiscussion on the importantnotion of long-run balance is required. The Definition is, unfortu-nately, somewhat confusing, especiallywhen appliedto the initial inventory position. Given Xi, it is appar-
ently of no consequence when this quantity was or-
dered.X$-/ simply does not appear n problem P forg< M,(j).One can thus expect that long-runbalance
be defined with referenceonly to X,'I- for ,This is indeed the case and the definition also can besimplifiedas noted in the following corollary.
Corollary4. Theorems 1 and 2 still hold if the defi-nition of long-runbalance is changedso thatX',- for
,u M.(i) - 1 are replaced by artificial constructs
defined recursively for i = 1, 2, ., N by
Xj,'- X '-,uI - , 1, . ..,M.(j). (13)
Requirement(5) can then be simplifiedso that
X I8, < X I8,it i+ 1.1
only for ,t = MA-1,- . ., M,(j+) (14)
and onlyfori=N- 1,N-2, ...,2suchthati #
s(i + 1).
Proof. We first show that the new constructs are
feasible in P, following (3) and the definition of
X,"'- so that Xj, -y : X,'-y+' and X',ju < XAI'-u for
k E P(i). The first inequality follows from the factthat it holds for i = 1, and if it holds for i, then it
holds for i + 1 since if i = s(i + 1) then
-X;2,"i+l _
il=
_A Aj+, - X"-Ij+,
by (13) and if i $ s(i + 1), then by (14) X"27',
(i + 1 ) >: X ,,- s (i + 1 )
XJ1Al"- (i
+01
X"y'1 (i + 1)+' by (13). The conclusion follows sinceX/'4'i XY'- by (13) for ,t < Mx(j+,).The secondinequality follows because i < k and by (13) and (14),X"'-,u , XjM7$or =O, 1,. .M.,M- 1. Thus, the newdefinition implies the old one, and so, Theorem2 stillholds. To demonstrate that Theorem 1 holds, it suf-fices to show that the old definition implies the newone. This is so because (14) follows directlyif MA,(i)MI,(j+,),and if MAi~,) M4(j+,), then (14) still followsbecause by (13), X',- does not increase.
The requirement (14)needsa comment forthe casewhere i $ s(i + 1) but Mi MAl(i?,)thus, Li = 0);(14) should be checked for g = Mi- 1 and Mi butby (13) it holds for Mi - 1. For ,t = Mi, (14) readsY,, < Xi. ,, and so, whether Xi, < XL+, is to be
checked. The conditions of the corollaryare satisfiedfor the ratherinterestingcase where all initial instal-lation stocks on hand and on order are zero exceptpossibly for the end item.
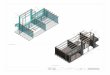
We close this section by applying Theorem 2 andCorollary 3 to the assembly system of Figure 1, asshown in Figure 2. The conditions for initial long-runbalance according to Corollary 4 are X6 7
XS6 Xe t;X4, 'I, X24X X21I, X34 31 X3 I
X41 XX X5; and X2 , X31. Note that items 4and 5 may interchange indices. Hence, the require-ments may be relaxedfurther.
4. A MORE GENERALASSUMPTIONONCOSTS
At the end of this section (Theorem 4), it is arguedthat the following GeneralizedAssumption covers allcases of practical nterest for a long-runanalysis.
Generalized Assumption (GA)
(i) hi . a "Ju) + E hkaj-l'(k))> 0 for all i(kc)(i)
(i) hij ae-Zu) < p +H,.
Basically,the sum of the echelon holdingcosts of itemi and all its predecessors are positive. Thus, it isallowed that hi < 0 for some i. However, hi > 0 forpurchased tems (B(i) = 0) and p > 0 is. still implied.
Negative echelon holdingcosts are interesting froma practicalpoint of view. There exist numerous real-life production systems where the sum of the instal-lation holding cost coefficients for the components islarger than the same coefficient for their assembly.Consider, for example, meat or rubber before andaftercooking or vulcanization.The components herehavethe moredistinctivecharacterof perishablegoodsthan their assemblies, and so, they may require more
expensive storage facilities. As a consequence, theechelonholding cost coefficient forthe assembliesmay
L7-1 L6=1 L4=2 L3=2 L2=1 L.-=I
outs ide custosupply 7 6 4 +5 2 D >deman
Figure2. Equivalentseriessystem of Figure 1.

8/6/2019 Assembly System
http://slidepdf.com/reader/full/assembly-system 9/16
572 / ROSLING
be negative. Below (Theorem 3) we present a proce-dure that eliminates all items for which hi ? 0 byaggregating hem into other items.
Lemma 3. Suppose that the GeneralizedAssumption
holds. If hi-
Oor some i, then thereexists an optimalpolicy for which
Y* = Min X', for all t.AGP(i)
A formal proof is found in Appendix B. When hi < 0
there is no cost of holding stocks, and so, as much as
possible is acquiredof item i.For an important special case, the minimum of
Lemma 3 is eventually attained by n E P(i) where nis the immediate predecessor of i's with the smallestlead-time. This is a crucial simplification and the keyto our procedure. Its demonstration requires the fol-
lowing Lemma.
Lemma 4. Lemma 2 holds under the GeneralizedAssumption.
The proof of Lemma 4 is found in Appendix B.
Lemma 5. Supposehi < 0 and h, > O or all k E P(i).If the GeneralizedAssumptionholds, then there existsan optimal policy for whicheventually
Iv (,,
for ,u=0, 1, ...,M,k, k,qeP(i), k<q
x$j,'-'J Xi,7 for , = 0, 1, ..., M,
n is such that Min,; = i,n.k EP(i)
Thus,specifically,Y* - XI.
Proof. Since the proof is similar to earlier ones, wejust give an outline. The availabilityof item k E P(i)affects the availabilityof other items only throughtheavailabilityof item i. Attention therefore can be re-stricted o the subsystemconsistingof i U P(i). It thenfollows by argumentssimilarto those of the proof ofLemma 1 that any optimal policy for the assembly
system is such that for all k E P(i) and all t
Yk*,X, - ifX;, a,;,; ak,= Min Xl,-k/eIN(i)
1>1;
X,;,< Y, ak, ifX,;,< ak,.
Thus, as soon as there is some production of item k,
then Y*, s ak, thereafter,and some periods later it
must be that X"', < XZ'- for all At and I > k,I E P(i). Since X > 0, accumulated demand will
eventually exceed any bound, and so, by Lemma 4,there will be production of all items. Thus, the firstset of inequalities will eventually be satisfied.The lastset of equalities then follows from Lemma 3.
Theorem 3 (Elimination of i for which hi - 0).Consider thefollowing aggregationprocedure:Pick ifor whichhi < 0 and h, > O or all k E P(i); n E P(i)is such that l,,= Mink(,;,) lk Item i is aggregated intoitem n (i.e., eliminated) and thefollowing data modi-fications are carried out.
h,l --hi,* a- + hi, 1,, -- ,, + 1,,s(n) -- s(i)
and P(n) {- JP(i) - n} U P(n)
h, hk -* /, and 1,.-, - l, for kE P(i), k# n.
Theprocedureends whenno such i can befound. Then
D = {i/i has been eliminated}and C = {i/i remains}.
If the GeneralizedAssumption holds then
(i) repeatedapplication of the aggregationprocedureresults in a smaller assembly system that satisfiestheAssumption;
(ii) if Si, i E C, are the reorder evels that eventuallybecome optimal for the aggregated system (byCorollary2) then thefollowing policy for the orig-inal system eventuallyalso becomes optimal
Yi,= Min(Si,X2,j') ifX,, S, | foriE C
Yil=Xi, ifXt>S, k=MinjlEC/l>i}
Yi,= X">'i for i E D, n is the item into which i was
aggregated.
Proof. (i) If item i is aggregated nto item n, then i ofthe GeneralizedAssumptionapparently still holds forthe aggregatedsystem (with item i excluded). Theprocedurecan be repeateduntil hi> 0 for all (remain-ing) i, or it is impossible to find i with hi < 0 such thath, > O or all k E P(i). In the first case, we are doneand in the second case, there must exist i (in theaggregatedsystem) for which hi < 0 and P(i) = 0.
Pick such an i. For the original system the GA impliesthat hi > 0 if P(i) = 0, and so, some items must beaggregated nto i. Since P(i) = 0 after aggregation,these items must have been aggregatedwith all theirpredecessors. Thus, there exists k such that after re-peated application of the cost modification rule, themodified cost coefficient of i is (expressed in theoriginalcoefficients)
hk + E hj a -( v'W_)-M(k)) > 0 by GA(i).je13(k)

8/6/2019 Assembly System
http://slidepdf.com/reader/full/assembly-system 10/16
OptimalInventoryPolicies for Assembly Systems / 573
This is a contradiction, and so, the assertionfollows.
(ii) If i and n are picked accordingto the procedure,then there is eventually an optimal solution such that
Y* = XI, by Lemma 5. Thus, aggregationof i into n
becomes optimal and we only demonstrate that the
data modifications do not interfere with optimality.By aggregation
/+/,-I
yi.1+1'='
Yli.
-
=l
and so, the parts of (2) concerning i and n (neglectingconstants) are
a a+/n-1 / * hi - Y,,, + > '-h' * Y,
- > t-l a'I'+l(hi h,, a-1j)Y,1,p=1
This verifies the modified cost coefficient for n and
the modified lead-time partly.The lead-time also ap-
pears,however,in (3) fors(i), butXI, of the aggregatedsystem is identical to X', in the original one because1,, -- 1i+ 1,,.Since s(n) -- s(i), the constraint (3) is left
intact. The modification of h, follows from the mod-ification of Ik because a/k * hk - Y,, = a k'1, * hk -
a'- * YA,,.The modification of l,k affects the feasible
set through (3). In terms of the original variables,
Y,l, X',$U forl=
1,;-1,, replaces Y,,
-
X', in (3).Since Yi,, = - s, the new inequality
implies the old one, but by the firstpartof Lemma 5,this does not interferewith optimalityin the long run.
Thus, the inclusion of {P(i) - n} in P(n) is verified
and the data modificationsdo not interferewith long-run optimality. Repeat this argument for every itemthat is aggregated nto another one. From the above
result i, Theorem 1and Corollary2, the assertion then
follows.
In Figure 3, Theorem 4 is applied to the assembly
system of Figure 1. The policy of Theorem 4 (ii) is
optimal from the firstperiodif the inventory positionof the aggregated ystemis initiallyin long-runbalanceand if, moreover, for i E D, X-,'y = X$"-ufor y =
0, 1, . . ., M- 1. The latter condition is quite strictand we, therefore,proposean approximatepolicy thatis applicable whether or not these requirements are
fulfilled.For those items that remain after aggregation,we
suggestthe policy (1 )-(12) of the last section wherethe minimum is taken over the items of the originalsystem. For items that have been aggregatedawayandfor which hi - 0, we suggestthe policy of Lemma 3.We are then left with those items that have been
aggregatedaway and for which originally hi > 0.Apparently,some other items must have been aggre-
gated into item i before this item was aggregatedaway(since then hi < 0). Consider these other items. Sinceaggregationalways is into a predecessorthey mustform a subtreeof the assembly network. Let I be theroot of the subtree. Aggregation in this subtree)beganwith I and hence h, < 0. We suggest the policy
Yi,= Min X"'-"'i (15)
where Q= Ik> i /k E B(l)}. This policy is an attempt
to ascertainas largea productionas possibleof item I
and simultaneously to take into account that pro-duction of item i in excess of X'-"i, k > i, k E B(l),is useless for this purpose. We expect the suggestedpolicy eventually to coincide with an optimal one,althoughwe have no proof to present.
The question remains whether the GeneralizedAssumption covers all cases of practicalinterest for along-runanalysis.
k7=l Z6-66=1
The aggregated
(D7~ ~ 34+ 1 >system
2=
5i} =4
L7=1 L6=1 L5=4 L2=1 L1=1
X______(i) _____> The equivalent
7u3+4+6
A o 2f 1m>
series system
Figure3. Application f Theorem3 to the assembly ystemof Figure1 (h, < 0 andh4 acK2+ h3 < 0).

8/6/2019 Assembly System
http://slidepdf.com/reader/full/assembly-system 11/16
574 / ROSLING
Theorem 4 (Practical Necessity of the GeneralizedAssumption).
(i) If hi * a -8s) + ZkEB(i) h,; a (k) < Ofor some i,then the minimal cost ofproblem P is unboundedbelow.
(ii) If i of the Generalized Assumption holdswith semistrict inequality for all items andhi* a- ('m+ XkEB(i) h,k a AI"(k) = 0 for some i
then there is an optimal policy for whichX', isunboundedabovefor all t > MA- M.(i)+ 1.
(iii) If i of the GeneralizedAssumption holds but iidoes not, then there exists an optimal policy forwhich accumulated production is bounded by
Maxk,X,, -Xi, for all i.
The proof of Theorem 4 is in Appendix B.
Casei of the theorem can, of course, only appear npractice as a consequence of incorrectly specifiedmodel data. When these errorshave been rectified weare left with case ii. Here item i is apparentlya free
good, and so, as much as necessaryis acquired of i
and its predecessors.It might take some time beforethis quantityarrivesbut thereafter tem i will never bein shortsupply, and so, item i and all its predecessorscan be neglected in a long-run analysis. We are leftwith case iii of the theorem. Here, the system is notworthoperating n the long run,and so, this case lacksinterest(althoughiii does not formallystate that pro-duction eventually ceases, this is an obvious conjec-
ture). Only systems for which the GeneralizedAssumption holds are left. Thus, all cases of possibleinterestfor a long-runanalysisare covered.
5. EXTENSIONS
Most real-lifeassembly systems are disturbed in oneway or the other by stochastic yields and lead-times.Long-run balance is then attained at most temporarilyand the seriesanalogy does not hold. Still it might bereasonable o model such systems as if yields and lead-times weredeterministic and applythe seriesinterpre-
tation to calculate reasonable order-up-tolevels. Anapproximatepolicy then can be devised, as proposedin Section 3 by (1 )-(12) and in Section 4, Theorem3 for cases that do not satisfythe long-runconditionsinitially.
Frequently,real-lifedemands aremodeled with sea-sonal variations. The series analogy directly carriesover to such nonstationarydemand distributions butthen the order-up-to evels Si are replaced by Si,. The
series interpretationgenerallycannot be expected tocarry over when holding costs or production costs arenonstationary. If it is temporarily advantageous toproduce item i, then it might be optimal to raise itsinventory level above X1+,, and so, the series analogy
breaksdown.It is generallynot possible to apply the seriesanalogy
to systems with setup costs in production. This isobvious when the setup cost of item i is much largerthan for i + 1. Item i is generallyproduced in muchlargerbatches than i + 1, and so, just afterproduction
of item i, one generally expects that Y* > X'?,,contradicting the seriesanalogy. However, there maybe special cases where the seriesanalogymay work asa good approximation.We have in mind cases wherelot sizes increase with i (i.e., with total lead-time) insuch a way that the expected reorder nterval for itemi + 1 is an integer multiple of the same interval for
item i (e.g., a power of two-policy). If item i is aboutto be produced but item i + 1 is not, then X', isgenerally much larger than Xi,, and so, even after
production, Y* < XJ?, as required. If, on the otherhand, i + 1 is about to be produced, then item i issoon to be produced andwe expectthatX' ,,is greaterbut ratherclose to Xi,. If production of item i alwaysis postponed until the production of i + 1 arrives in
Li+,periods,then the seriesanalogywill hold. Presum-ably this postponement generallyincursonly a minordeviation from optimal costs. However, if demandrecently has been high, there can be a profit from
producing a lot of item i immediately, just to makeuseful the excess few units of item i + 1,X?+, -XIas soon as possible. Thus, we make an approximationin addition to the strong assumption about lot sizes
being related to total lead-times. These assumptionsaresimilarto those used by de Bodt and Graveswhenattemptingto extend their series model to a two-levelassemblysystem.
APPENDIXA: VARIATIONSOF THE COSTASSUMPTIONS
1. Sales Prices and Proportional Costs ofProduction
7r= unit sales price of the end product, paid at deliv-ery;
Cj= unit cost of assembly (or purchase) for item iincurredafterassembly (at delivery).
ci is the additional cost of productionof item i so thatthe cost of its predecessor components are not

8/6/2019 Assembly System
http://slidepdf.com/reader/full/assembly-system 12/16
OptimalInventoryPoliciesfor AssemblySystems / 575
included. Maximizing net profit, the analogy of (1) is
E{ Ea`(r -a"X + -YX1 tI()~
- (- Y, )b`() d]
A'
- E Ci a'i(Yi, -Xi,)i=1
The expected revenues of period t are due to the
expected demand of period t plus expectedbackorderscarried over from period t - 1 minus expected back-orders left at the end of period t.
Using the relation E(X,,) = Y,_- X and adjustingfor constant terms associated with A, (16) can berewrittenas
-Ea1I'* [h, +(l 1-o)c1J
-~~~~~ oa e(i,-li . I])A[i+ ]
1]))
+[p+(l -at)r+HJ]*o/
*f H - Y -Y' 0")dd}
+ constant. (17)
(17) is apparentlyequivalent to (1). To see what costmodifications are actually carried out, write the back-loggingcoefficient as
i=l ~~~i=l
Recalling that Hl = X,= hi, the modifications are
N
E + - a)(ir - - a)c
i-l
and (18)
hj hi +1I-O-)ca.
Thus, revenues as well as production costs may beneglected and problem P applied.
2. Reduced HoldingCosts DuringAssembly
Q,j= reductionof the echelon holding cost per periodof item j during assembly of item i j, A, hiif i<jand Al,- 0 if i =j.
It seems fairlynatural that holding costs are differentwhen items areon the assembly line and in the storageroom. Not only arereductionspermitted by the abovedefinition but as j = i is allowed, the possibility ofholding costs incurred from the moment of orderingis also accounted for.
The reducedechelon holding costs duringassemblyare handled indirectly by a reduction in the produc-tion costs. The present value (at delivery)of the costreductionduringassemblyof one unit of item i is
E A,j(a' + a2 + *-- + a1i)*jE=_B(i)uji)
As demonstrated in the previous section, a propor-tional cost of production, c,, may be eliminated if(1 - a) - ci is added to the echelon holding costcoefficient. Thus
hi <hi- i A-,(a-li1).
With this modification of hi, the model is equivalentto problem P. Note that when a = 1 there is, in fact,no modification (except for the constant of (17)).
3. A Fill-RateTypeShortage Cost
b = unit cost of backlogging[$/unit].
While p with dimension [$/unit x time] is naturallyassociated with stockout constraints of the type aver-age outstanding backordersper period, b is naturallyassociated with a fill rate type constraint, averagenumber of demands per period not satisfieddirectlyfrom stock on hand.
Since stock on hand first is used to satisfy oldbacklogs,the discounted expected cost for new back-logs in period t + 1 is
a1* b * a(f (Q Yj,O+'+() dt
Q - Y, O'(Q)d#) (19)
where 0'(.) is the convolution of O(*)over 1, periods.When adding(19) to the other costs of (1), a modi-
fication of ii of the GeneralizedAssumption is neces-saryfor our results to carryover. To see the nature of

8/6/2019 Assembly System
http://slidepdf.com/reader/full/assembly-system 13/16
576 / ROSLING
the modification rewrite i of the GeneralizedAssump-tion as
N hi(a - 1 p
E 1-a i- (20)
The left-hand side is the present value (at the deliveryof the end product) of all holding costs for the com-ponents incurred during production. The right-hand
side is the present value of the unit cost of backloggingover the entire infinite horizon. To take b into
account, (20) is modified so that
A hi(aAl,') - 1) p (21)
i=l 1 -ea 1 - a
As long as p > 0 or a < 1, ii should thus be modifiedto
N
ihi a-'u) < p + H, + (1 - a)b. (22)
However, if p = 0 and a = 1 then (22) is not correct.
The limit is taken directlyfrom (21) so that
N
hi M(i < b. (23)
Replacementof ii of the GeneralizedAssumptionwith
(22) and (23) is sufficient for all our results to carryover except for the order-up-to policy of Corollary 1and Theorem 3. Since (19) is not convex in Y,,thereis no guarantee that (1) will remain unimodal in Yi,after the addition of (19). Thus, when X'+,, < Si it
might be that an optimal policy requires Y* < X,'because of a local minimum. Neglectingthis anomalyis, presumably, an acceptable approximation.
APPENDIX B: OMITTEDPROOFS
Proof of Lemma 1
If an optimal policy, Y* (with states X), violatesthe assertion, then for some i and t (and some out-
comes of demands) Y* > Xi, and Y* > XZ,'-M'i
Min,k>i ,-'i. Then define an alternative policy Y(with statesX) which deviates from Y* by
Fit= Max(X,,, X,,'-xli) andY,(k), = Min(Y(/), Ak'q)
for all k EI{i}IU A(i), q =t + Mi- I,(k-,. (24)
Policy Y postpones production of item i in period t,one period ahead. If required for feasibility (by (3)),some production is also postponed a period for itemk E A(i) in period t + M, - M,;.Note that Y satisfiesthe assertion for i and that it is feasible for P. Since
YF, Yi*, Y,V, Y*, and hk > 0 for all k and s, the
holding costs of (2) are lower for Y than for Y*.Consider the backloggingcosts of (2). They are the
same for Yas for Y* if Y, = Y*, where r = t + M, -
M,. This will be demonstrated. Pick j, k, n E A(i)such that j E P(l), j = s(k) and k = s(n). Let u =
r-4 and w = u-1,;. Then by (24)
Xj -pj,. = YJ*,-yj,,
= Max(O,YJ,,-X/_) - Max(O,Xj,-X, i).
Similarly, X$'-' -1 = Y* y_Max(O,Xkl - X;,7') and so,
X//
= iMlax(O,j.-X j,. + Max(O,X,, -X*?, ))
= Max(O,XJ, X,," 1)since X>j, X,,Al by (3).
Extending this analysis to all items of A(i) and when
i is included (note that Yj,= Min(Y*, YF,))we get
X',-X = Max(O,X',-I
Pick m E A(b) such that m E P(1) and consider the
difference
AT -' Xj, = (X/1?/ NJ,) (Xjr. -JAr)
=(X/,), - Xj.) + Max(O,X, - X',jIxI). (25)
Suppose that XII - XI,?,.Since YV, XAf,I,jXAl-A,
Xh>" and so
Xi/' -,lZrjX/
bl- 0
by definition and (3).
Thus, XX,,Xj =X, -Xj. so that Xj, = Xj, and= Y*, by (24). Suppose that XI' > X/?. If
X', XX',, then Y,, = Y* again. Suppose that X, >
X' Then by (25), necessarily, X', > X,". Butthen by (25) (note that X" ',- X',- by definitionand (3))
X I- X + X /- AT = X/0 -All
1)71 Jl 1)1/ Jl Jl 171 1)? 1
6 ,? x)l ={AI1 X7,A[,. < 0
by assumption.
Thus, XI, < X/ and since Y*, - XI, by (3), Y,, =Y,*by (24). Hence, the backloggingcosts are the samefor Yand Y* and so, Yis superior o Y*, contradictingits optimalityand the conclusion follows.
Proof of Lemma 2
TheAssumption implies the GeneralizedAssumption,and so, Lemma 2 follows directlyfrom Lemma 4.The proof of Lemma 4 requires the followingproposition.

8/6/2019 Assembly System
http://slidepdf.com/reader/full/assembly-system 14/16
OptimalInventoryPoliciesfor Assembly Systems / 577
Proposition
Let I C {1, 2, ..., N} and A = UiE, A(i). If the
GeneralizedAssumptionholds then
i hia",u) < p + H,.ic,I
Proof. Let J = {i ? A/s(i) E AI and B = Ui-, {B(i) U
fill. A U B = {1, 2, .. ., NI and GA(ii) may be writtenas
> hiao1 ) + > hia-','i) < p + H,.i.1 iElB
The second term on the left-hand side is
, {hi * a-'"(i + > h/; a*1Ix(Ak} < 0 by GA(i)ici kEBB(i)
So, the conclusion follows.
Lemma4. If the GeneralizedAssumption holds, then
for any optimal policy
Y* >,-Min O MiXkm for all i and t. (26)kv>i
Such a policy satisfies (on a first-come first-servedbasis) all customer demands within at most MN + 1
periods of time.
Proof. The first assertion is demonstrated by an
inductive argument. Suppose a feasible policy (inter-
preted as a function of demand history only) has been
fixed for all i > n and, given this restriction, optimalvalues, Y,,, have been computed for all i < n - 1 and
t. The inductive hypothesis says there is a solution for
which (26) holds for all i - n - 1 regardless of what
feasible policies were fixed for i > n. This (partial)
optimization is repeated and this time it also includes
i = n and feasible policies are fixed only for i 2 n +
1. By the inductive hypothesis, there is a solution for
which (26) holds for all i < n - 1 and t. By a
contradictive argument, (26) will also hold for i = n.
So, given some fixed policies for i > n, pick an optimal
solution Yj, (with states Xi,), i - n, for which (26)
holds for i < n and where for at least some t, say
t = q,
Ynql Min (O, X '-).k>,,
Note that Y<q<0 so that there are outstanding back-
orders for the end item. Define a new policy Yi,for all
i - n and t. To do this note that by the inductive
hypothesis for i < n, Y1, -XAI,i for t = q + Mn- M
because X>jl' Yn,,, 0 by definition. Then define
An={n U {i< n/Yl, =X$ ,'-fort= q+ M,, M1
and the new policy Yi, with statesXN,)or i < n by
Yi,= YF, for all t if i i A or
if iEA fort<q+Mn-M,
Yi,=
Yi, +e
foriEA andt=q+M,7-M,Yj,= Max(Y1,, Xj,)
foriEA andt>q+M,,-M,. (27)
The new policy is feasiblebecausen > i implies thatM,,> M, by definition. It is assumed that E is small
enough so that if i M A, then Yj-
X '-i for t =
q + M,, M1.The new policy suppliesc more units ofthe end item in period q + M,/. Beforecomputing thecost implications, note that by (3) i M A implies thats(i) 4 A since
v-1
=Av iv,v - r, +
,,1
where I = s(i), r= q + M,, Ml and v = q + MnMi. Consequently, i 4 A implies that 1 4 A for all/ E B(i) and A is similar to the set appearingin theProposition. The difference of e additional units instock for the new policy will prevail until some pro-duction is scheduledby the old one by (27). For somerealization of demands, suppose 6 < Eunits of the enditem areproduced by Yin period q + M,,+ T(possibly,
T = oo).The total gain in costs of backlogging s then
a 23 oea'-I* . (p + HI)/qt+AI,n-/1
= - (p + HI) acI+' (1 -o )/(I - a).
For this production to be feasible there must be pro-duction of item i E A in period q + M,, + T- Mi orearlier.Thus, an upperbound on the additionalhold-ing cost is
v+T- I
6 . >fi fi a'-' a*'i hi
= . a+l.' hi . (1 -iT)/(I - a)
where v = q + M,,- Mi. Thus, there is a net gain for
M,(i) Mi - 1i nd by the Proposition
Ehia-'"ZSu)< p + H
Thus, the newpolicy givesa net gainforallrealizationsof demand and the optimality of the original one iscontradicted.A similar but much simpler argument

8/6/2019 Assembly System
http://slidepdf.com/reader/full/assembly-system 15/16
578 / ROSLING
shows that the inductive hypothesis holds for n = 1.Thus, the first assertionis demonstrated. The secondone is a directconsequence.
Proof of Theorem 4
(i) Considerthe subsystem {i} U B(i) and supposethat a finite optimal policy exists. Then consideran alternativepolicy that orders one more unitin period 1 of the component, m, with thegreatest total lead-time M11, in period M,,, -
Ml + 1 of the component, 1, with the next tothe greatest total lead-time and so on, so thatone more unit is ordered of item i in period
M,- Mi + 1. This additional unit is held instock forever. The additional cost of this policyis for the first M,,, - Mi periods (capitalizedtoperiodM,,1-M1 + 1)
E h a 'k(1 + a + + aAlk-AXl-) a-Wk-_,d
IkEB(i)
or equivalently
h, * a1k(a-U"I,k-`i) - 1)/(1 - a).k G B (i)
The cost of holding item i foreverfrom period
M.- M1+ 1 on is
hi aia+ fi hkg a'k/ (1 -a).k EB(i) J
So, the total cost increaseis
alj'(h,+ ,kEBsi) hk,; a- '1s(k;)- l'.si)))
1 -a <O
by assumption.
Thus, the conclusion follows.
(ii) As above, except that the final inequality is anequality.
(iii) Consider the final item and suppose that in
periodt, Y*, > X, and accumulatedproduc-tion exceeds Max,<X,, - X,. Consequently,accumulated production of item i exceeds
Max,kXI, - X,, in period t - (Ml - M) = torearlier.Consideran alternativepolicy Ysuchthat Yj,= Y-*- 6 for all t > (t, or the firstearlierperiod with production > 0) where 6 >Os arbitrarily mall. The cost savingof having6 units less in stock over the entire horizon isat least (capitalizedto t, + L,)
A'
8 hii, ",w( - a).
The increase in penalty costs over the sameperiod is
b(p + H,)/(1 - a).
By assumption, E',,a(-"l(i) >
p + H, and so,the new policy is as good as the old one,verifying the proposition for i = 1. Considernext all i E P(1). If hi > 0, the conclusiondirectly carries over to item i, but if hi < 0,then there is an independent motive for build-ing up stocks of item i. Considerthe subsystem{i} U B(i) and apply the same argument as forthe final item. The same conclusion followsbecause GA(i) holds for i. These argumentscarryover to all i.
ACKNOWLEDGMENT
The advice of an anonymous referee considerablyimproved this paper. The research was supportedby the Swedish National Board for TechnicalDevelopment.
REFERENCES
AXSATER,., ANDP. LUNDELL. 984. In Process-SafetyStocks. In Proceedingsof 23rd Conference n Deci-sionand Control,pp. 839-842. Las Vegas.
BESSLER,. A.,AND
A. F. VEINOTT. 966. Optimal Policyfor a Dynamic Multiechelon Inventory Model.Naval. Res. Logist.Quart.13, 355-389.
CARLSON, . C., AND C. A. YANO. 1986. Safety Stocksin MRP-Systems with Emergency Setups for Com-ponents. Mgmt. Sci. 32, 403-412.
CLARK,A. J., AND H. SCARF.1960. Optimal Policies fora Multiechelon Inventory Problem. Mgmt. Sci. 6,475-490.
CLARK, A. J., AND H. SCARF. 1962. Approximate Solu-tions to a Simple Multi-Echelon Inventory Problem.In Studies in AppliedProbabilityandManagementScience, pp. 88-110. K. J. Arrow, S. Karlin andH. Scarf (eds.). Stanford University Press, Stanford,
CalifDE BODT,M. A., AND S. C. GRAVES. 1985.Continuous-Review Policies for a Multi-Echelon InventoryProblem with Stochastic Demand. Mgmt. Sci. 31,
1286-1299.FEDERGRUEN, A., AND P. ZIPKIN. 1984. Computational
Issues in an Infinite-Horizon, Multi-Echelon Inven-tory Model. Opns.Res. 32, 818-836.
FUKUDA, Y. 1961. Optimal Disposal Policies. NavalRes.Logist. Quart.8, 221-227.
HOCHSTADTER, D. 1970. An Approximation of the Cost

8/6/2019 Assembly System
http://slidepdf.com/reader/full/assembly-system 16/16
OptimalInventoryPolicies for Assembly Systems / 579
Function for a Multi-Echelon Inventory Model.Mgmt. Sci. 16, 716-727.
KARMARKAR, U. S. 1981. The Multiperiod,Multiloca-tion InventoryProblem.Opns.Res. 29, 215-228.
KARMARKAR, U. S. 1987. The Multilocation,Multiper-iod Inventory Problem: Bounds and Approxima-tions. Mgmt. Sci. 33, 86-94.
ROSLING, K. 1977.A Generalization f Clarkand Scarf'sApproach o Multi-EchelonInventoryControl.InThree Essays on Batch Productionand Optimiza-
tion, pp. 20- 111. Linkopings Tryckeri AB.Linkoping,Sweden.
ROSLING,K. 1989. Bounding Procedure or Clark andScarf's Serial Multi-Echelon Inventory Model.
Working Paper, Departmentof ManagementandEconomics, Linkoping Institute of Technology.S-581 83 Linkoping,Sweden.
SCHMIDT,C. P., AND S. NAHMIAS. 1985. OptimalPolicyfor a Two-Stage Assembly System Under Random
Demand. Opns.Res. 33, 1130-1145.