Embed Size (px)
Citation preview

T _ "_ _ _ f _i\ASA (:otVerence Publication 2_o8
TetherDynamics
Simulation
fU/_A
https://ntrs.nasa.gov/search.jsp?R=19870009388 2020-04-02T14:41:24+00:00Z
NASA Conference Publication 2458
TetherDynamics
Simulation
NASA Office of Space Flight
Washington, D.C.and
George C. Marshall Space Flight Center
Marshall Space Flight Center, Alabama
Proceedings of a workshop held at
the Hyatt Regency Crystal City Hotel
Arlington, Virginia
September 16, 1986
N/kSANational Aeronautics
and Space Administration
Scientific and TechnicalInformation Branch
1987
FOREWORD
The objective of the Tether Dynamics Simulation Workshop was to
provide a forum for the discussion of the structure and status of
existing computer programs which are used to simulate the dynamics of a
variety of tether applications. A major topic of the workshop concerned
itself with the purpose of having different simulation models and the
process of validating them. Guidance on future work in these areas was
obtained from a panel discussion consisting of resource and technical
managers and dynamic analysts in the tether field. The conclusions of
this panel are presented in Section III, Workshop Summary and Panel
Discussion Results.
NASA Headquarters, Office of Space Flight, Advanced Programs, along
with NASA Marshall Space Flight Center, sponsored the workshop. General
Research Corporation and the American Institute of Aeronautics and Astro-
nautics provided the workshop coordination. General Research Corporation
also prepared the workshop proceedings. The workshop was held at the
Hyatt Regency Crystal City Hotel in Arlington, Virginia in conjunction
with the International Conference on Tethers in Space, which was held
Sept. 17-19, 1986.
iii

WORKSHOPADMINISTRATIVEPERSONNEL
WORKSHOPORGANIZERS
Charles C. Rupp William A. BaracatNASAMarshall Space Flight Center General Research Corporation
Edward J. BrazlllNASAHeadquarters
ADMINISTRATIVECOORDINATORS
Terrence G. ReeseGeneral Research Corporation
EXECUTIVECOMMITTEE
Paul A. PenzoJet Propulsion Laboratory
Charles C. RuppNASAMarshall SpaceFlight Center
Silvio BergamaschiUniversity of Padova, Italy
Peter M. BainumAmerican Astronautical Society/
HowardUniversity
William A. BaracatGeneral Research Corporation
PANELMEMBERS
HowardFlanders Henry WolfMartin Marietta Denver Aerospace Analytical Mechanics Associates
Dave Arnold Silvio BergamaschlSmithsonian Astrophysical Observatory University of Padova, Italy
Joe Carroll Charles C. RuppEnergy Science Laboratories NASAMarshall Space Flight CenterEnrico Lorenzlnl Paul PenzoSmithsonian Astrophysical Observatory Jet Propulsion Laboratory
Peter Bainum Bill DjinisAmerican Astronautical Society/ NASAHeadquarters
HowardUniversity
WORKSHOPCOORDINATION
Pamela EdwardsAmerican Institute of
Aeronautics and Astronautics
Mereille GerardAmerican Institute of
Aeronautics and Astronautics
PRECEDING PAGE BLANK NOT FILMED

TABLE OF CONTENTS
Page
Foreword
Workshop Administrative Personnel
I. WORKSHOP PRESENTATIONS
"Tether Dynamics Simulation," A.K. Misra and V.J. Modi
"Martin Marietta Simulation - HIFITS (Hi-Fidelity-
Tethered-Satellite) Simulation," H. Flanders
"The Tethered Satellite System on the Systems
Engineering Simulator," R. Humble
"GTOSS - Generalized Tethered Object Simulation
System," D. Lang
"Tethered Satellites Simulation," J.R. Glaese
"Skyhook Program," D. Arnold
"Slack3," G. Gullahorn
"Artificial Gravity Laboratory," E. Lorenzini
"Elasticity Effects in Tether Dynamics," S. Bergamaschi
"TSS Subsatellite Attitude Dynamics and Control
Laws Verification Programs," F. Venditti
"Validation of TSS Engineering Simulation," Z. Galaboff
"TSS-I Dynamics Flight Experiments," G. Gullahorn
"Tether Simulation Design for Mission Planning
and Analysis," R. Deppisch and Y. Jani
II. ADDITIONAL PRESENTATIONS
"Preliminary Analysis of DampingEffect on Tethered
Satellite," G. Bianchini
"Rigorous Approaches to Tether Dynamics in Deployment
and Retrieval," E. Antona
III. WORKSHOP SUMMARY AND PANEL DISCUSSION RESULTS
APPENDICES
A. Workshop Agenda
B. Workshop Attendees
vii
PRECEDING PAGE BLANK NOT FILMED
iii
v
25
57
73
95
113
125
141
161
187
219
235
249
277
279
315
331
337
341

I
WORKSHOP PRESENTATIONS
Tether DynamicsSimulation
Arun K. MisraMcGill University
Vinod J. ModiUniversity of British Colombia
TETHERDYNAMICSSIMULATION
A.K.MISRA
McGILLUNIVERSITY
MONTREAL,QUEBEC,CANADA
V,J.MODI
UNIVERSITYOF BRITISHCOLUMBIA
VANCOUVER,B.C.,CANADA
PRECED4NG PAGE BLANK NOT FILMED
PURPOSE OF SIMULATION
I i TO STUDYTHE GENERALDYNAMICSOF THE SHUTTLE-TETHER-SUBSATELLITE
SYSTEMDURING (1)
(II)
(Ill)
STATIONKEEPING,
DEPLOYMENTOF THE SUBSATELLITE,
RETRIEVALOF THE SUBSATELLITE,
II, TO DETERMINEAPPROPRIATECONTROLLAWS AND SIMULATETHE CONTROLLED
DYNAMICS,SPECIFICALLYDURINGTHE RETRIEVALSTAGE, MOST OF OUR
SIMULATIONSHAVEDEALTWITH THIS ASPECT,

orbit.
z D
Te 4_.<
Xo
z C
E
B Xa
line ofnode
, perigee
N
equator ial plane
Figure I. Geometry of motion.
7
SIMULATION PROCEDURE
EQUATIONSOF MOTIONARE OBTAINEDUSINGHAMILTON'S
PRINCIPLE,VIBRATIONALEQUATIONSARE DISCRETIZEDUSINGRITZ-
GALERKINMETHOD, THESEDISCRETIZEDEQUATIONSALONGWITH THE
ROTATIONALEQUATIONSARE CONVERTEDTO A SET OF FIRSTORDER
EQUATIONSOF THE FORM x = F(_,e)WHERE e IS A DIMENSIONLESS
TIME (TRUEANOMALY)AND x IS THE VECTOROF STATEVARIABLES,
THE SYSTEMOF DIFFERENTIALEQUATIONSIS INTEGRATEDUSING
GEAR'S METHOD,
POSSIBLE DISCRETIZATIONSCHEMES
PHYSICALDISCRETIZATION:(1) LUMPEDMASSES(OR POINTELEMENTS)
CONNECTEDBY SPRINGSAND DASHPOTS-
KALAGHANET AL, AT SMITHSONIAN
(Ii) FINITE ELEMENTS- KOHLERET AL,
(FORESA)
MATHEMATICALDISCRETIZATION:(1) FINITEDIFFERENCE- KOHLERET AL,
(FORESA)
- KULLA
(x_)RITZ-GALERKINMETHOD- BUCKENS
- BANERJEE& KANE
- BAINUMET AL,
- GLAESE& PASTRICK
- MISRA& MODI
SEMI-ANALYTICALPROCEDURES- BERGAMASCHIET AL,
DEGREESOF FREEDOM
TETHERROTATIONS: INPLANE (PITCH)
OUT-OF-PLANE(ROLL) Y
TRANSVERSEVIBRATIONS : INPLANE
OUT-OF-PLANE
N
W = L 7--- B (T)¢ I(Y)l=l I
N
U = L ._ A I(T)(hI(Y)
I=l
LONGITUDINALVIBRATIONS : V = L 7__ C I(T)_ I(Y)I=1
THUS THE GENERALIZEDCO-ORDINATESARE
% Y, AI, BI, C I
¢ (Y) = 2 SIN (_Y/L)I
(Y) = (Y/L) II
iO
ENVIRONMENTALFORCES
GRAVITATIONALPERTURBATIONS
DUE TO THE ASPHERICITY OF THE EARTH - J2 PERTURBATIONS,
PERTURBATIONS DUE TO THE ATTRACTION OF THE SUN AND THE MOON,
THESE EFFECTS ARE SMALL,
SOLARRADIATIONPRESSURE
CAN BE IMPORTANT AT HIGH ALTITUDES,
EVEN AT LOWER ALTITUDESj HEATING EFFECT MAY BE SIGNIFICANT,
ELECTRODYNAMIC F0RCE
FORCE ON A CONDUCTING TETHER MOVING IN THE EARTHIS
GEOMAGNETIC FIELD,
AERODYNAMICDRAG
THIS IS THE MOST IMPORTANT ENVIRONMENTAL FORCE AT THE LOW
ALTITUDES (I,E,_ FOR TSS-I AND TSS-2 MISSIONS),
II
AT = _ _iCD p _A CvI_I2
WHERE AF IS THE AERODYNAMIC FORCE ON AN ELEMENT HAVING PROJECTED
AREA AA
CD IS THE DRAG COEFFICIENT
P IS THE DENSITY OF AIR AT THE ALTITUDE OF THE ELEMENT
UNDER CONSIDERATION
V VELOCITY OF THE ELEMENT RELATIVE TO THE ATMOSPHERE,
CD IS ASSUMED CONSTANT IN OUR SIMULATION
p = pREF
-(H - HREF)/H 0 -H/H 0
E --Po E
WHERE H = ALTITUDE ABOVE THE SURFACE OF THE EARTH
OBLATENESS OF THE EARTH IS TAKEN INTO ACCOUNT (AFFECTS H)
ROTATION OF THE ATMOSPHERE IS TAKEN INTO ACCOUNT (AFFECTS _)
THE EXPONENTIAL RELATION ABOVE IS AN APPROXIMATE ONE,
PO AND H0 ARE DETERMINED FROM THE EXPERIMENTAL DATA SO
AS TO FIT THE LOWER END OF THE TETHER WELL,
12
PROGRAM
WRITTENIN FORTRANIV TO RUN ON A_AHL OR IBM MAINFRAME,
CORE MEMORYREQUIRED- 512K
SOFTWARENEEDED- IMSL
INPUTS ORBITALELEMENTS,
SEMI-MAJORAND SEMI-MINORAXES OF THE EARTH
AIR DENSITYPARAMETERSAND DRAG COEFFICIENTS
TETHERPARAMETERS(DENSITY,DIAMETER,YOUNG'SMODULUS,
DAMPINGCOEFFICIENT),
SUBSATELLITEPARAMETERS(MASS,AREA OF CROSS_SECTION)
INITIALSTATEVECTORS x(O)
DEPLOYMENT(RETRIEVAL)PARAMETERS
CONTROLGAINSFOR ROTATIONSAND VIBRATIONS
OUTPUTS- STATEVECTOR _(e)
LENGTH,LENGTHRATE
13
I.I-0
\\
\\
0 0
..J
i 1 i
0 0 0
14
c9._
t_
0
tD
t23
C_ c_
O4
e-
t--
t--
0 _¢-0
°p-
0
"E.2.t-- .+._
_0
_oo _.}
o
&iZ
(:3C_
:%O0I I I I
O. 30 O. 60 O. 90 1.20
ORBITS
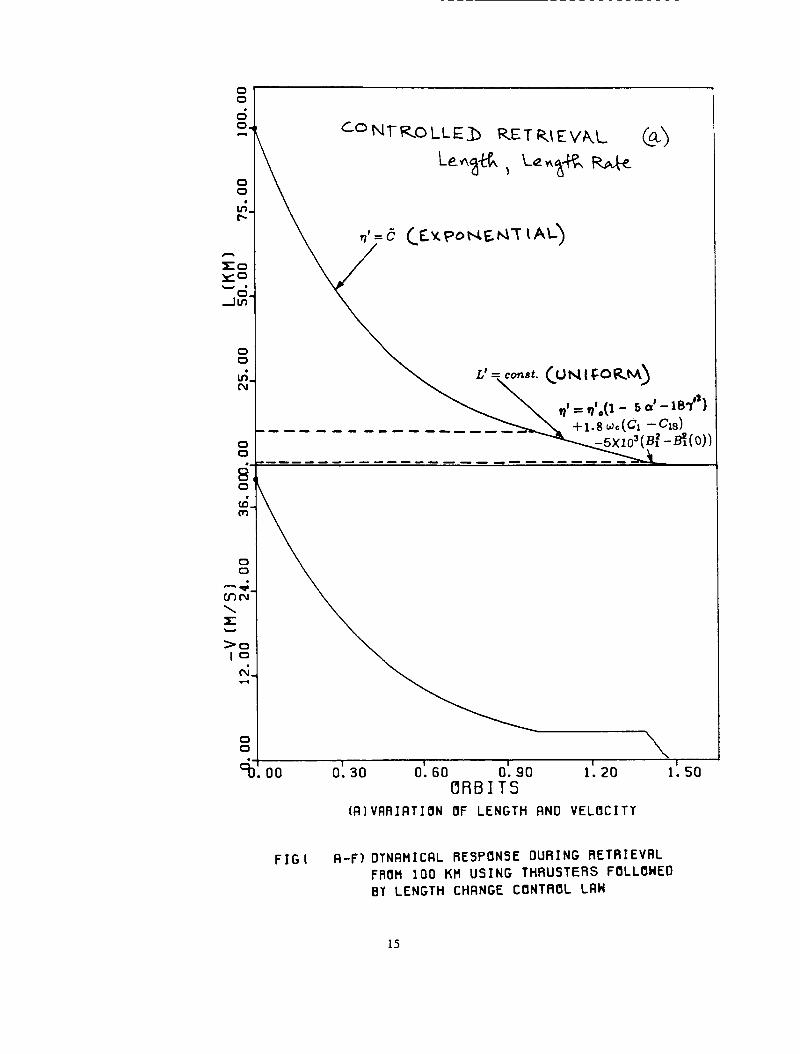
(RlVRRIRTION OF LENGTH RND VELOCITY
\!
l. SO
FIGI R-F) DTNRMICRL RESPONSE DURING RETRIEVRL
FROM IOO KM USING THRUSTERS FOLLOWED
BY LENGTH CHRNGE CONTROL LRH
15
jI I I ! !
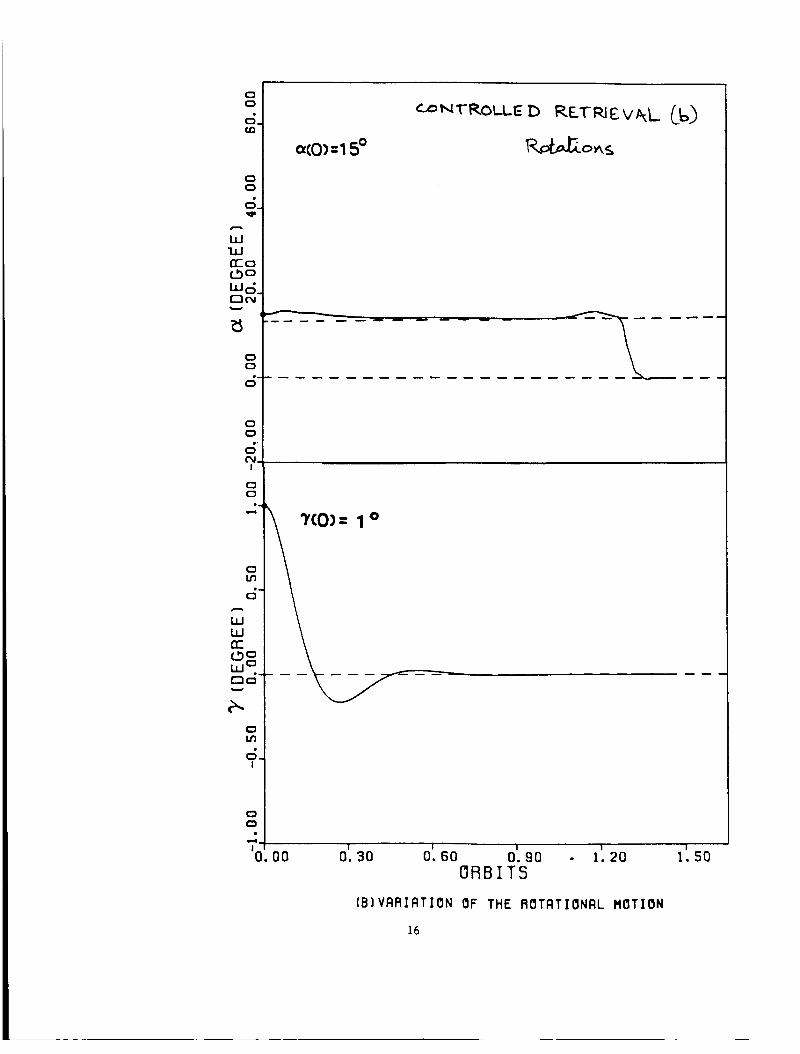
O0 O. 30 O. 60 O. 90 - I. 20 I. 50
ORBITS
(B)VRRIRTION OF THE ROTRTIONRL MOTION
16
00
'TQ
!
00
i'!
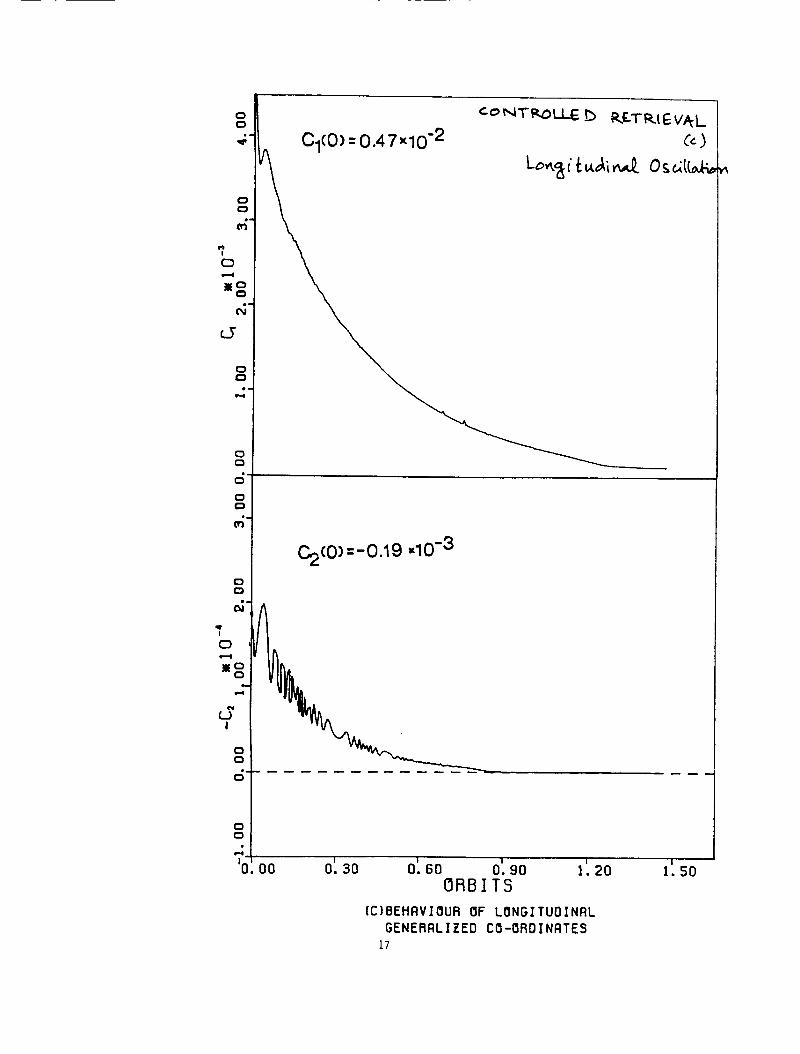
C1(0) = 0.47x10 "2
C2(0)=-0.19 ,,10 -3
Y_
O0I I I I
O. 30 O. 60 O. 90 1.20ORBITS
(C]BEHRVIOUR OF LONGITUOINRL
GENERRLIZED C0-OROINRTES
17
1.50
oc)
eq
oIf)
(5-
?o
4
cE
(3l.tl
I
0
o
I
c)(:3
o_
o111
(5-
o
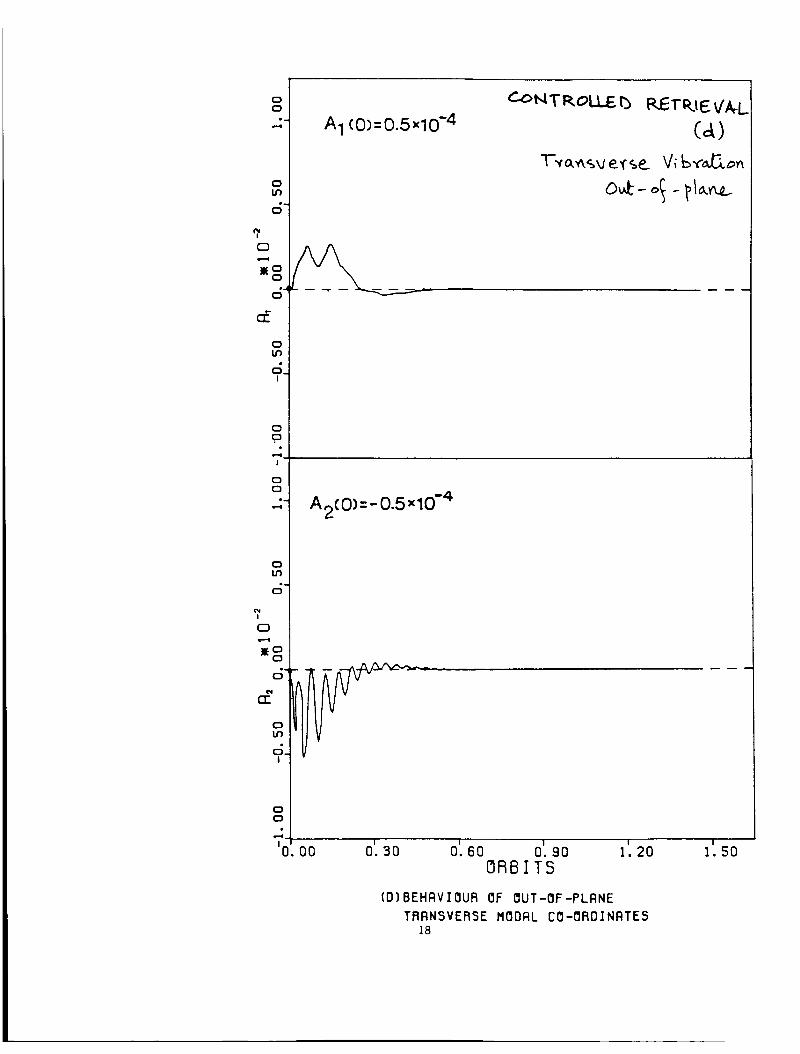
A 1 (0)=0.5x10 -4
c-ONT R,OLLIE b IKET{_IEV_L
A2(0)=- 0.5x10-4
lI I
.O0 O. 30 0.60 0.90ORBITS
! I
1.20 1.50
(D)BEHAVISUR OF OUT-(}F-PLANE
TRANSVERSE MODAL CO-ORDINATES18
C3
q.o5
0
I
oo
o.
I
c)
i.lii
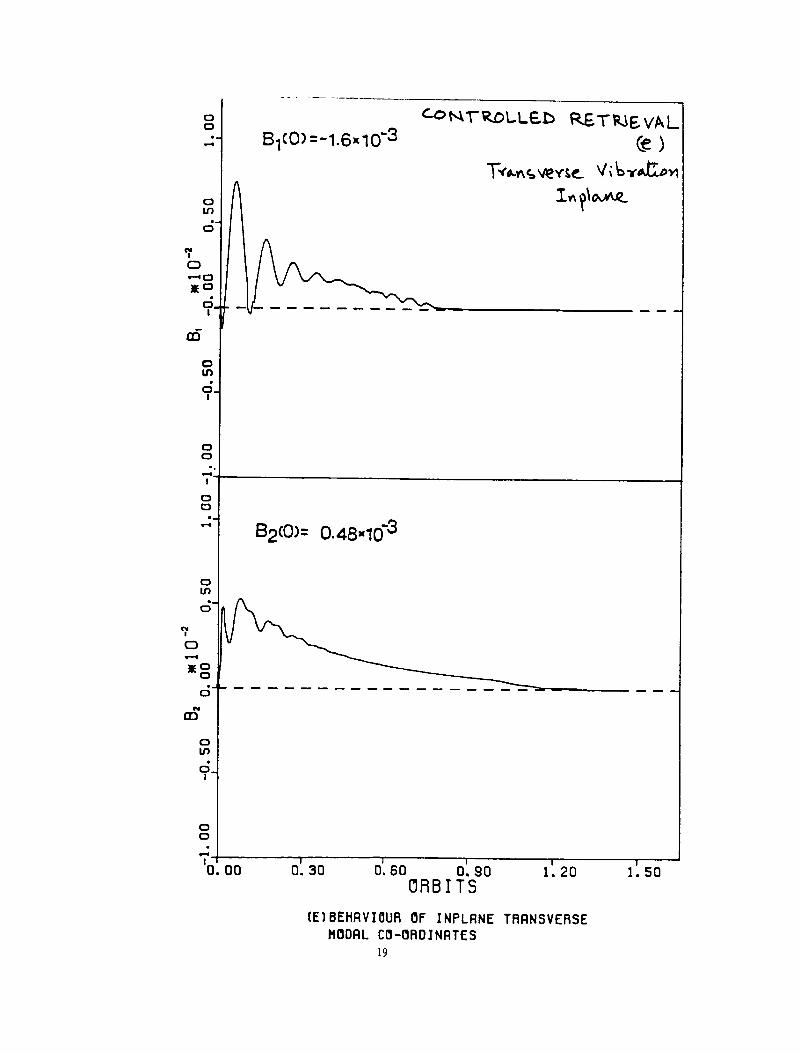
BI(O) =-1.6,10 -3
B2(O)= 0.48,,10 -3
I I I
O. 30 O. 60 O. 90
ORBITS
I !
1.20 1.5O
[E]BEHRVIOUR OF ]NPLRNE TRRNSVERSE
ROORL CO-OROINRTES
19
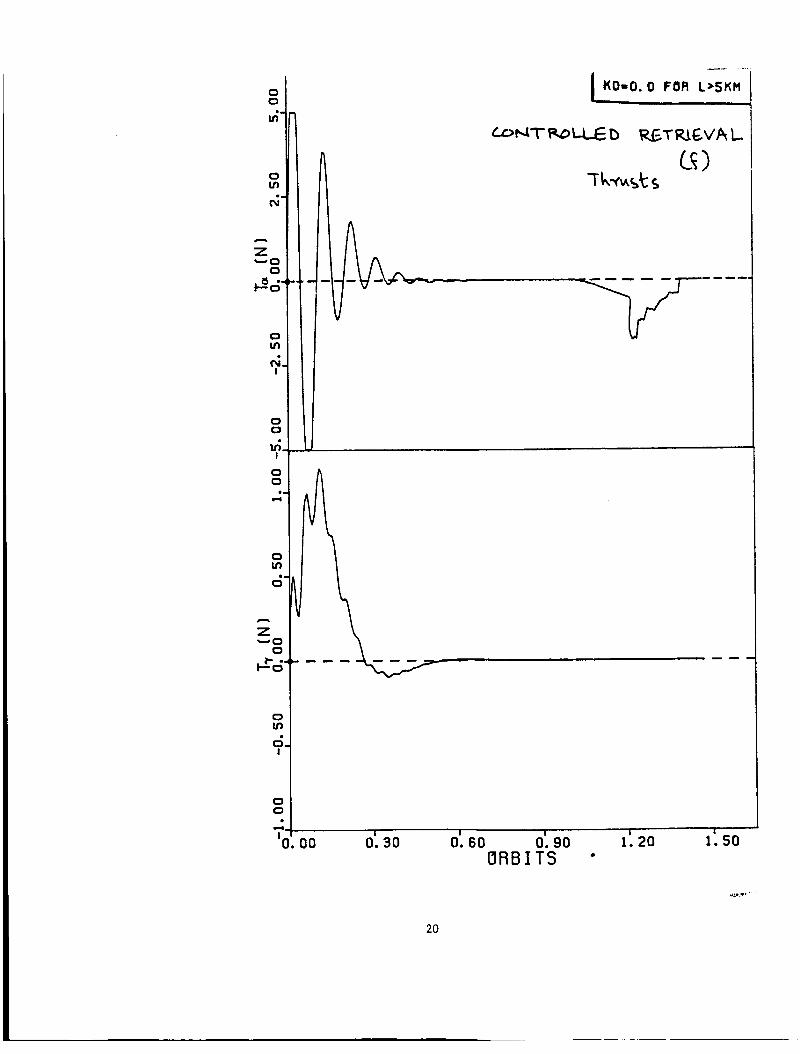
i KO-O.O FOB L>SKM
0LO
(:3!
C)C)
.-;.'0. O0
I I ! ! I
O. 30 O. 60 O. 90 1.20 1.50
ORBITS "
2O

00
u-;"
0IS)
IJr)
I
0C_
'0'.I
O0 O. 30I I I
O. 60 O. 90 l. 20
ORBITS
I
1.50
(F)VRRIRT]ON OF THRUSTS
21

[ Mb= 170kg ; Li = lOOkm: Lhn=O 25kin
PC=0 658kg/km e ==O" i =90o:_"=-2._0"4s "1dc=O 325mm; A_(O)=A,_) = 8_(0)=8._(C):H =220kin: C1(0)=C2¢J)=0: T/_0)_'_/_ = C
10
80
L
(kin) 60
40
20
'7(clegreel
2C
(,-1800
(degree) C
2
-c=(.i0.4) 1
0
-I
C 1
(=10 -3 )
7C0)= 1 o
t)=195 °
0 4 0.8 1,2 1.6 2.0 2.4 2.8
C.2(0} =-0.19.10 "3 (..6)
C1(0) =0.4 7=10 "2
2
1
O-- , , ,0 0.4 08. 1.2
orbits
i i1.6 2.0 2.4 2.8
F£g. _4_ _ecrleval dynam£cs us£n8 solely
t.ru..r o. rolCX (a) Variac£on of length and rotations.
(_) Behaviour of longitudinal general£zed¢o-ordtnates.
i
1 J B2(0_: 0.48.10- 3I
_ ._ ,.,,h','dL*m'"hlF,,,a,_,('10 -_ )
--1/
(:-)
81{G)=-1.6=10 -3
1
Bl
(._o-2) o
-11
AZ A2 (0}:0"5"10.4
(.I0 "2) 0-.._,_ .......... ='-'
-1I
A I ._1 (0)='0"5"10-4(.10-2) 0
-1 ' i I I 1 I I0 0.4 0.8 1.2 1.6 2.0 2..4 2.8
-5
1 _,_ %=-2(l'"/2)YV:27'-10(Al'- ZA2"
T._ 0.5
(N.)
T. [IIV il_lll'llllJl_(N.) 0
0.4 0.8 1.2 1.6 2.0 2.4 2.80
G
(,20N)
t_ihut tle enC_
_iv. = ._o N
' ' ' 2'.00 0.4 08 1.2 1.6
orbits
(C) Behaviour of transverse modal
¢o-ord£n_es.
(d) Variation of thrustS.
(e) Varia_io_ o_ tension.
2.4 28
22
(52)

STRENGTHSAND LIMITATIONS
STRENGTHS
°SIMULATIONOF GENERALDYNAMICSINCLUDINGTRANSVERSE
AND LONGITUDINALVIBRATIONSOF THE TETHERTREATEDAS
A CONTINUUM,
°CANHANDLEDYNAMICSDURINGCHANGEOF LENGTHQUITE
RIGOROUSLY,PROVISIONSFOR CONTROLOF RETRIEVALDYNAMICS,
LIMITATIONS
°ROTATIONSOF THE SUBSATELLITEARE NOT INCLUDED,
°SOMEENVIRONMENTALFORCESARE NOT INCLUDED,
23
FUTURE PLANS
° EXTENSIONTO SPACESTATIONAPPLICATIONS
° SIMULATIONONMICROCOMPUTERS
° SIMULATIONOF VIBRATIONCONTROLLAWS
° MULTIPLETETHERSIMULATION
24

Martin Marietta SimulationHIFITS (Hi-Fidelity-Tethered-Satellite) Simulation
HowardFlandersMartin Marietta Denver Aerospace
25

Z0
._J
LU
,_ _j _
I-.- _._ LJ.
I"-
¢'_ w Z
'r _ I'--
v
I.--
-r
PRECEDING PAGE BLANK NOT FILMED
27
0
w
r,."I.m_
m,0
m,m
I..61,.-.,
Z Z0 _I--I _J
_ ,,,._ s'- r'.,_..I ,,m 0
I-"I.m- m.m Z0 _ '"
Z ZI--I 0
0 _r, I_ I--Ir,? 0"-_ 0 Z
_ m,,
m.m
r,_-.
XIJJ
ILl
k--_'- CtJLJJ
>- -_C(--%
0 0 0 0 0
28

cozOHI--
.._1
H00
Z
(.D0
_-
(/'3
(,0
.._
I--.I---
Z
I--
ooO _ _o
...4 I--.(__ ,,, r_0 I,_ H_ 00 '_-- r-_ ,, (.._O 00 H O H h0- I-- 00 '_- -r t.,J
0 0 0 0 0 0
I--"H
H
,,O
O0,-
.--_0-
t'---H--IILl
I,--I
I-l-
-r"
(.DZH
I--I
On.-
>-.
(.OOn,*O..
>-O..JO_
oo
I--- Ol--
l,J.l-I- Z_-- O
HI--- I-.-
O .--_
(/'3 0'3
O
I I I
0 0
29
i\ I
30
NOII33BIO IIB_O
\
31
l__- _CD
c_
_J
_J
o
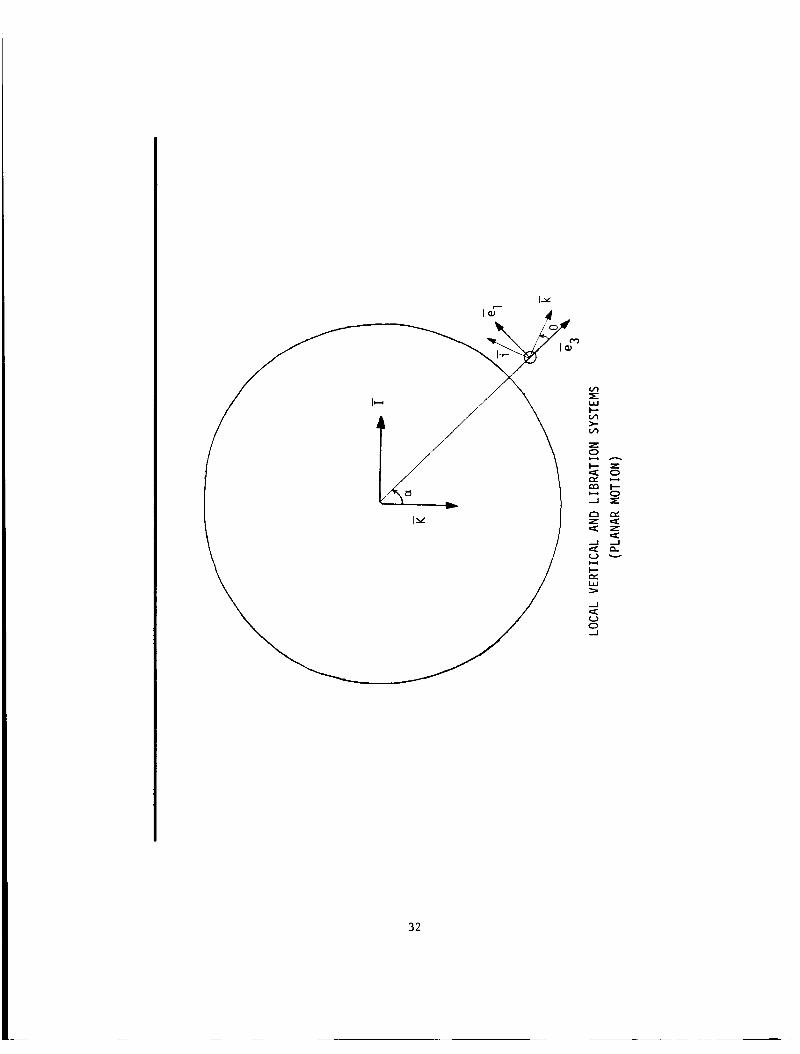
32
mJ
tY
DII_ z
rl_J l_J O_I_j
iRi
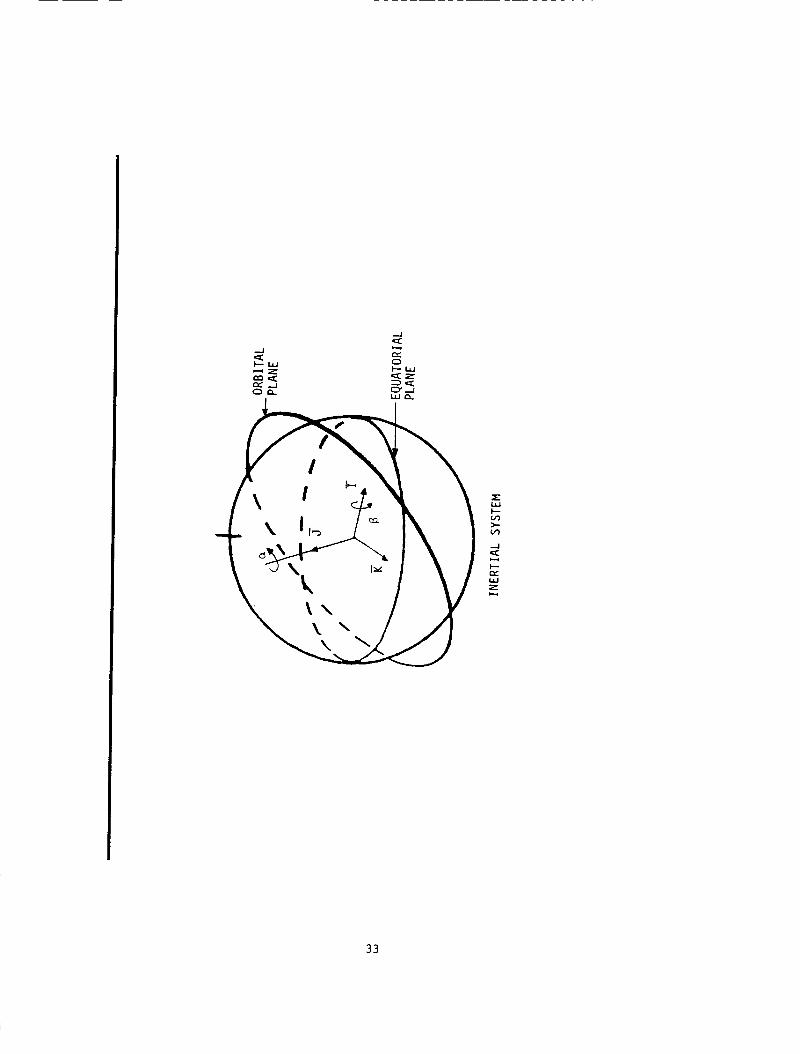
33
Z
I--Il--
c_
I.L=C_Z
Z
CS_>-
WI=-
ZI--I
00
l.ul
l.lIJ
Zll_
-I-
'cOL.ul
rml.lJ
Cr_CS_
I--
i-7
I--
l,l
34
I..l.J
ZI,-II-.-z0
¢ozC_I.-II--
C_C_i,
Z
I.--
C_Z
GO
i,iF--
>...oO
ILlI--
I-.-IC_C_0C_
I.-.-
! !
I'," I'_ 1-_I !
A
0 ¢:,
I
v
I.-- I-.-I,.-- q:_ o ¢>
-_ (._ (./')t I
,T'-rj
t-- I-.-.•' Q ._- -e-l..-.-
0F--
I._ I..-
!
I. !
I I
i._ i._ i-__I I
35

z0
I---
I--I
._J
I.L0
I
0
I--40o
InI--.4
-T-"
X_J
÷
i ,4-
I II
ix_mx ,-- ÷
_ ix'-
IIII
I_ IxI,.-
36

r,,."
-I-Z3:
37
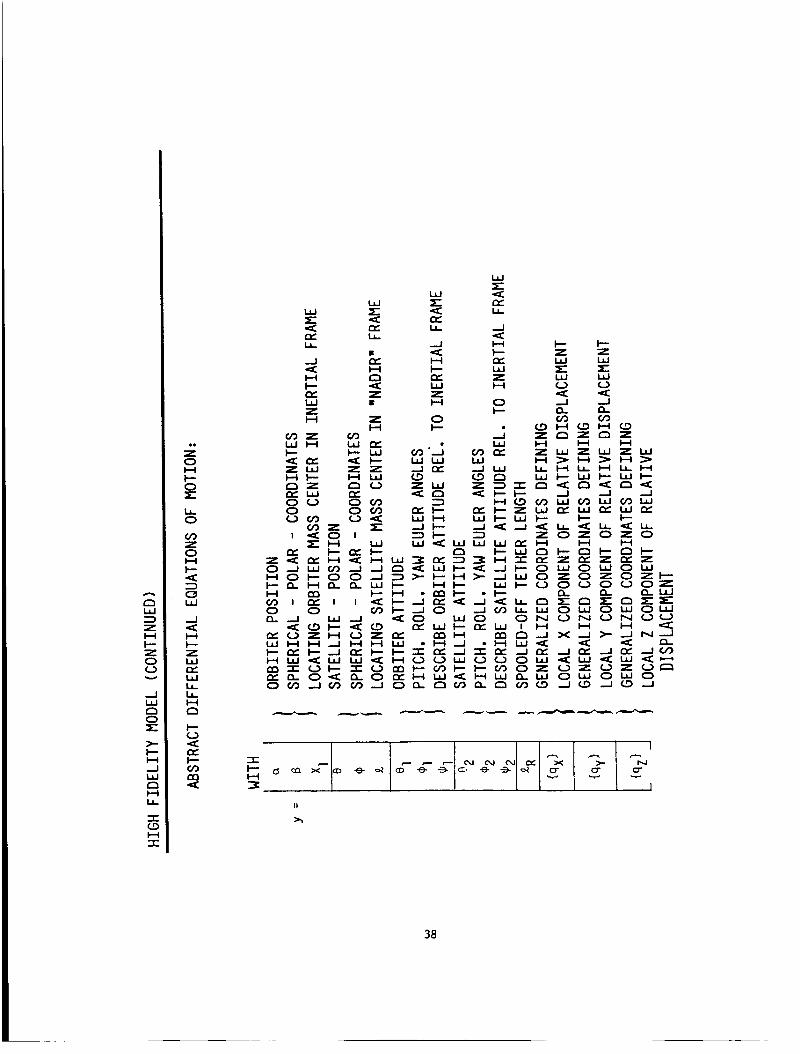
A
,,1:DzI--II-..2:O(.3
LIJ,"%O'w"
>...I--I--I.-ILi.IC_I--4I..i_
3=(.9I...-43=
OI--II-.-O=E
1.1_O
COZOI-.-4I.--
:::D(3LIJ
._1
.,_I--4I.--ZLIJ
IaJLI_I.i_I.-4¢3
l--(J¢l:eep-O_
-I-
LIJ
p,.-LI_
i,imE
'" _ <mE ee._ e_ I.i- iJe_ I, ¢z:
._j e_- I--I ¢_ l.JJ
Pi ¢_ _ _" l.iJ L.IJI-- "¢_ LLJ I--I (J (J
l.aJ • I-'4 (:3 --J -J_: }-- ¢_ ¢_
P'4 p- -- (.9 I--4 (.._ I-4 (._ct_ Z ¢._ .-J Z r_ Z c'_ z
I--.4 I.iJ ev* -- _ I--I I.-I I--II-- I-- I.tJ (tJ'...J ¢._ Q::: ;= I,I _= LI.J Z: LIJ_ e_' <1{ I--- 1.1.1 I,I LI.I I--I _ I--I _ I--I _Z LLJ Z Z .__1 r_" -.J LIJ LI_ I---I LI- I--I LI.. I"11"-4 I"-- 1--1 1.1.1 Q (.D (::3 LIJ I-- 1.1.1 I'-" I.IJ I'--e-_ z e._ (j z i,i_e l.l.j ¢Y <l: r'._o (-.) o ¢._o oct') eel--(.3(,'9 (..3.,:I: kl.l _..I
O9 "=" mE -J i--l <CO J _ I--
:E: I-.4 LLJe_- I--- ¢'v" p--
<C l--- I--- --J -J .-JI....t (,._ ¢,_ I.LJ (_ I.rJ r.._ L.i.J
e_ i..- Z LIj cY I,i e_" I,I CEt.LJ I_ UJ i--- I-- t--
I,i ,,={: i,i W i,i ev- i--_ p._ p-_¢-_ I--- L_J _ I--- C3 I--- C3 I_
_- <C ,Y F-4 ._E p-_ Lm :::_,Y --_ ::_ I--4-,- ,Y Z _X: Z ,',"Z0 _J ,,, C_ _J _J C:_ .,_ uJ I-- ._: --J I--- 0 Lm 0 UJ 0 UJP-I 0 p- 0 0 _J _ _-- I-- _--_>- .J UJ 0 Z 0 Z 0 Z i--l-- _. h-_ _. _. ',' I-- _-_ I-- UJ I-- (J 0 (J 0 (J 0 Z
I E I I <:E I---- J E <:E ._J <:E I.I-- Q %-" (::_ _" {::_ _'- E0 0 rJ9 I-- J 0 _.I o9 ,, L_I 0 l._J 0 l._J0 I-I-I{:_. J I.JJ J .,c_ O I.._l O O N (J N (..._ N (.-_ U
•,_: (..9 I--- ._ (.D _Z: UJ !-- P," '"' _,! _'-I _--I I--4_:_ (J z t-_ (J Z _ n-_ _M n_ _J X -J >- -J NI._1 lil I--I _J I--I I--I LtJ - I---I -.J - I---I I._ <:E <I: _=E 13-
p-I i._i .,_ uJ ,,, ._I: i--I(.) 0 uJ 0 0 0 uJ ._E l._J <C '" "_E '--*,.,._ -T- (__ i.-- --r- (.3 ,,m p- oo i-- I-- GO 0 z (.3 z 0 Z (.3 i_:_,-_ ,-, 0 ._: __ 0 m,- i-..i l.,j .,_ lil ud _.. L_J 0 U.I 0 Lm 00 ¢_ ..j _0 C/'_._i 0 Q.. r'_ _ _.. E:_ 09 (.9 ._J (.0 -.I (.9 -J
,, ]
II
38
_Ji,iC_O
ry*L_"l-k--L_k--
A
C_
rw
o0
_Jtw
k-4rv*
¢O
',' u_
o_ rv*co ,,,
-J Z
,.,'" X
O _.
0
C_
"I"
O
Z
k--h--HCX:ZZ
GO
O
O
_J_Ck--zL_
ZO
I--4
Z
C_Z
Z
F-z
F-
ZM
O
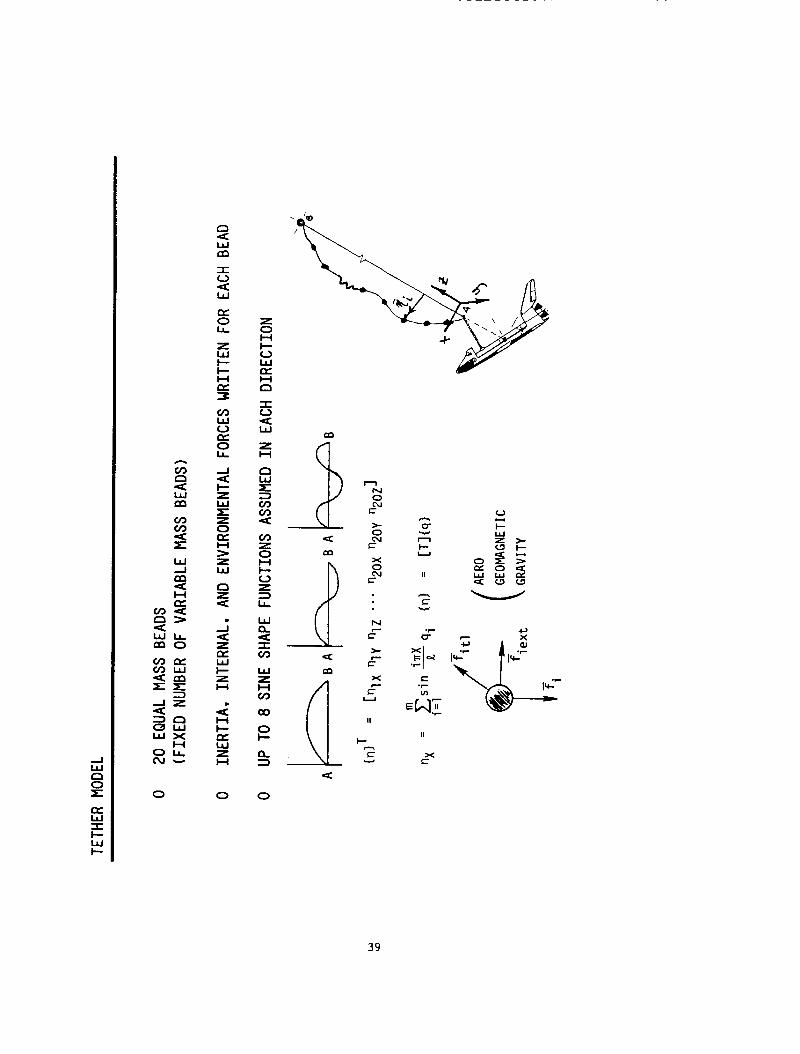
Z0I-=II--
L.IJ
I-4
ZI--I
cO
GOZO!--IF--(3z
1.1.
i,ia_
-r-
I.iJZH
00
0I--
0
o
>= o" I=-o _ ,,,
i_" I-- _ l*-c_J
• '_ _
>" _ " _ ,-_: _'- . _ I_" I_
X e-
_ _ "7,
_ M7Ee,-
II
U
I.--
_ E
39
._.JLM
O
I---Z
Z0Q::I.--I
Zi,i
I,OQO0"_
Z
cO
O_JGO
,.,¢:
Z
,._1I.i,JI-4LI.
I--4
Z
_E:O
cOC_
¢D
v
._.JI_l.J
O
I.i.J
w-r-Q_
O"s-l-,--
Z
O_
!
QO
I.i..
L_":-
GO0
h_O0!
ICOqD
(.JGO
A
Odho
m_
A
_0
40
GO-.JW
0
LU
>-GO
ILl' _ O..
0
U.; H
_'-- 0
O0
o
o
o_
d
==
0
0
Z0(_)
Z0
I--
0 0 0 0
41
A
O
zOI-4
_=1
I,-I
Goi,..=I,-4
-I'-
I=1=
i,i
I-I
O
i,i-I-I--L.I.II'--
t--I
i,I--t
-r
I'--I.,i.I
t--"00
I--II"--
I'---
I
O
I.ulI..i.J
1.1_
I"--I=1.1
I'--OO
I=-IIn
--.II=1.1
I--4
Z>-
i,iZO
O
OOi,ir_O
Z0I,-I
i,i
I,-I
-r-
i,i
ZI=-I
I..I.IGO
i,i
OOZ
I-=
CO
Z
-,J
I-4
I-=I--I
ZO,-.I
00
OI--
a.-=_
-=1i.
I--I.-=iI--I--
1.1.1
I-4
O
O-.,.II,.1_I,-I
ZOI--4I'-.O
ZOI--II--
I--I,_J
0I--
I.t.I%.00
I--I--4
I..i.II--
0
0
1.1.1i,i
i,
1.1.1
I--I,-I
I--
F.-I--I
O
,,,w--I
A
,._1LI_
I--II---I,--.
i-=I--I
._,1I.LI
OO_=_
._,1i,I-4
zOI--II--O
ZOI-.4I--
1,-I
OI'--
OO_,J
i,i
I-.4
I--
1.1.1I,.-I-.I_=1=_1I.UIn
O
w1.1.1
i,i
I--I---4I,--In
1.1.1I--I--I..J._1i,iI.--
cO
/,2

>-
I--
.=_I
l=iJI--I
I--
.=_I
ZI,-I'r0Z
i=-
l,--f./*j
i==I
z>,=
v
0
II
Q=I--I
.--II=i=I--I
z0I-*I
I,-I_J
0l--
l=iJ
0
i,I
.-_I---I-.II--
,,C
l,,iJi.-=I--I
r_*0v
0
II
0._JI.i=I--I
I.i.Ii,i
I=I=
l=iJtm
I--I--II--I-=
w
I--I._I_=Il=iJ
v
II
.-II.I.I--I
43
_J0
)-
I.i.
Z0I--II--I--IzI--I1.1_
C_
ILl.--J(.DZ
L._
,_1--J0
I--I
-.J
I---
-r-Q-
W(,.DZ
--J
¢XJ-'r-
L._0
¢.DZ
"1-(_)
I..i_C)
1.1.1I--
Q::
Lid
I-4
"-I-
ILlI--
n_
I,.tJ¢DZ
.--J
ILlI--H
r_0
0
--.JCOz
n
l_ul=_I(.DZ
Z(:3I--II--.
12DI--I...J
I.i=IZ
._IQ.zI--I
-r-l-'-
CoQ-
LI-0
(.DZ
-r-(.3
I.L0
l=l,Jl--
l=l.J
I--I
0'3a=
l,.ull--
l.ul._I(.DZ,_
ZOI--I
r,.-
I--I
1,4JZ
.=JO,=ZI--I
I--
LI.I--J(.DZ.,_
).-
1.1.1I---1'--4--J-.I
I--
Q.
W.--ICOZ
Z0I--II---
I--I.-I
ILlZ
.--Ia.,
II=1-0
I
-'10
'-i-a..
('%1CO
I.i..0
ILl(.'.Oz
"1-(.3
i,0
I.iJI.--_Cn_
1.1.1
I--II---
Or)
1.1.1I--
he"
W-J(.DZ
ZOI--II,.--
I.-I__I
z
_.IQ_I
I=i.0I
I.--
0
Q_
l--
Z0I--Io')z
l--
-r
I--.
(_)I--I
I---
I--O_L.I.
l=iJ
(.DZ
1.4.1._I
Lld
-'t-OI.--I.--IO..
I.i.I
I--I
0
-1'-I---
l.a.lI-.-I--I_Q
0
-1-I.--
i,0
L.I.I(.DZ
-r-(.)
1.4.0
1.1.1
I,I
I'--II'--
*el
I---
z
_.-
O(.3
ZOI--IODz
I--
(,.)
=_It..Dz
1.4J_.I
w
(.3l--HQ.
WI--I--4
._IW
0'3
I-*
Z0I.-I
z1,4JI--"
1,a--
Od"-i-I---
i,0
I.iJ(.OZ
-r-(.)
I=1.0
1.1.1I--
i,i'rI--I
rm
-r-I.--
I'-,...0
L_
Z0;-4COZbd
I--*I,-Ito
O
L._O
I=i.I_J(.DZ,_
1,4.1__I,-_
._I
.=JO
-rQ_
,=l-_=
L,_O
I._(..DZ
-I-
O
I---
I,--Ii=-
-I-
44
i
i
\__ _I_
Jv
_f
(
45
n IP
_p,r
/
/(\
v
_q
J
46
f
_ Z_q_•
cr_ _A
m v
_ Z_ _
iIIIIl
47
!
\\\
\\
\\
\
48
\\\
\
\
F---
49
C"
5O
_'777 ;I
_ _ a a, _n _$
C--
|,
51
I
_ L,-mmmm if,-- _Ik
-i
Z _
i
0.
52
r-
| |
J
f
I--
53
F--
b"
J
f_
Zr-%,
54
ff
\ I,Jo. o. o. o. o. o.0 0 0 0 0 O
! I
q
q0
I wO_ o
q
, >
o.!
Q
_ C7 -r"!
r7cl
o. o. o. o. o. o.0 0 O 0 o 0
I
qL_
oL_
I w
O
>
oL_
0
_ Nn-!
Q
55

t_Z0I-th-
l--
Q..00._1
I
ZIZT" I---I-4 It--- Z
)--4I.,.I s
,cC-,- _.-
0 0
r-_0
_--
Z0
.-J
0 0
0
._.1
z0I--I
0 O0
56

The Tethered Satellite System on the Systems Engineering Simulator
Ron Humble
Lockheed Engineering and
Management Services Company, Inc.
57
Lockheed_Engineering and Management _
Services Company, Inc.
The Tethered Satellite Systemon the
Systems Engineerincj Simulator
by
Ron Humble
PRECEDI_ pAGE BLANKNOT FEdBED
59
SYSTEMS ENGINEERING SIMULATOR
TETHERED SATELLITE SYSTEM
INTRODUCTION
The purpose of this presentation is to discuss the tethered satellite
system (TSS) portion of the Systems Engineering Simulator (SES). The SES
is a real time simulator, used at the Johnson Space Center (JSC), to
evaluate space shuttle operations when there is a man in the control loop.
The "on-orbit" portion of the SES consists mainly of a mock up of the
shuttle aft cockpit, complete with functional controls. The operator can
"fly" the orbiter using the cockpit controls and can respond to simulated
external scenes and cockpit displays. Other portions of the SES include a
front cockpit mock up for ascent/descent simulations and a manned
manoeuvering unit (MMU) for extravehicular activity (EVA) simulations.
DESCRIPTION
The on-orbit SES simulates the dynamical interactions between the
shuttle orbiter, the MMU, and one other payload. (This capability will be
increased to 4-6 individual payloads in the near future.) All of the TSS
simulation is controlled from a mock up of the shuttle orbiter aft cockpit.
This cockpit is complete with hand translational and rotational
controllers, digital autopilot (DAP) console, radar console, remote
manipulator system (RMS) console, and the generic CRT
6o

consoles/keyboards(MCDS).Statusofthetetheredsatellitecanbe
monitoredin fourways:
1.)withsimulatedvisualscenesoutof theport rearand both
overheadwindows;
2.) withsimulatedcamerascenesgeneratedon television
monitors;
3.) withsimulatednumericaldatafromthemultifunctionCRT
displaysystem(MCDS)display;and
4.) withsimulatedshuttleradardata.
Manipulationof thesatellitecontrolsystemisdonevia the MCDS
keyboard.
Certainparametersandvariablescanbeoutput,duringa simulation
run, to both a magnetic tape and an hardcopy printer. The tape may then be
post processed to generate digital tables or plots.
During a simulation run, system faults (ie. an RCS jet failure) can be
generated via an operator's console. This console will allow faults to be
input to either the orbiter, the satellite, or the winch system.
51
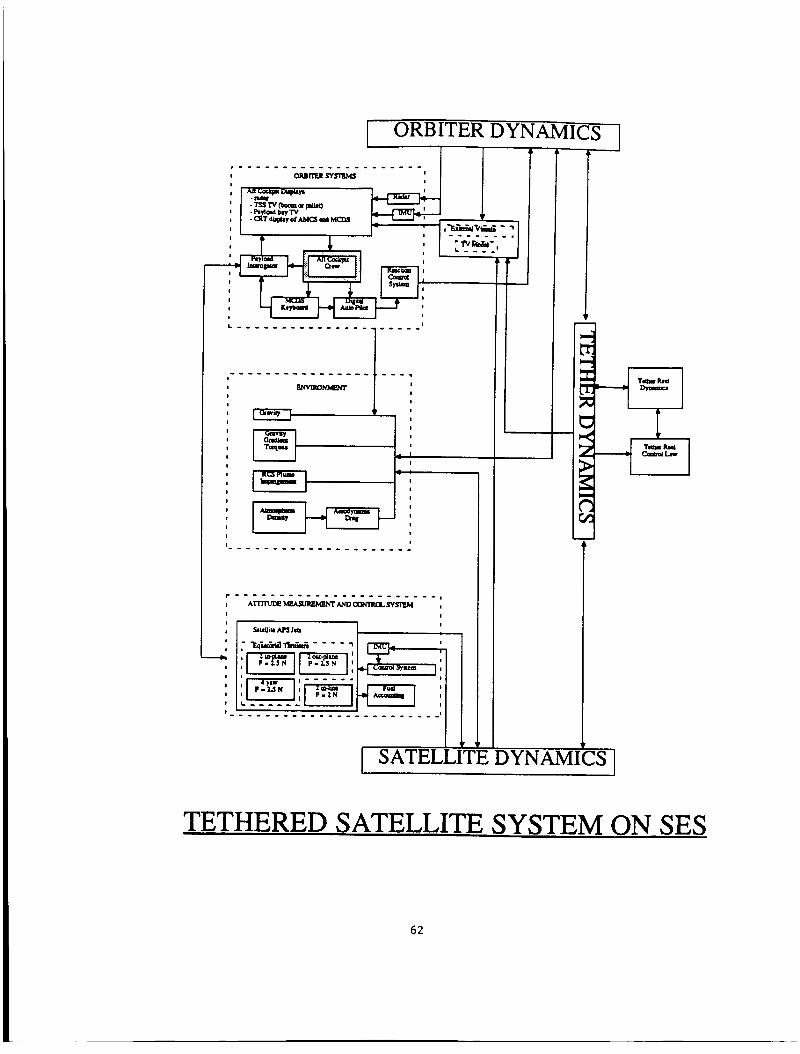
ORBITER DYNAMICS
OU _ SY_I_k5 oi
i
, ,i !i ii i
L. 1 O
.... . o .._ ...........
[_ .,
o
_ ''
..... . .... ...........
b k
I
I
f
r- ........ - .............. o
i ATrrrt_ _LA._ AND CON_ SY_ a
o a
i [ '_wnil4 A'IN3 JNI 1, .
', ], _a._._,,_ .... , r-t,_'_._ ',
-" I'I-;__-I_:I_T - ' Io a I _11."_ I t
l', '- .... -"------' '--------' ', I
L,SATELLITE DYNAMICS I
TETHERED SATELLITE SYSTEM ON SES
62
SYSTEM MODELS
The TSS system is modeled as two free flying vehicles each with six
degrees of freedom, constrained by an extensible tether with an
additional degree of freedom. The vehicle translational equations
include three second order differential equations containing the M50
spherical coordinates.
force = mass X translational acceleration (F=mA) - 3 dof
The vehicle rotational equations include three first order differential
equations containing the body Euler angle rates and four first order
differential equations containing inertial quaternions. The Euler angle
accelerations are integrated to give Euler rates,
moment = inertia X rotational acceleration (M = Io_)- 3 dof
the Euler rates are then transformed into quaternion rates. The quaternion
rates are integrated to give inertial quaternions which are then
transformed back to Euler angles for output.
Shuttle equations of motion •
Ashuttle = (l/mshuttle)(Fgravity+ Faero+ FRCS+ Ftether+Fpayload+FRCSplume)
i-1_shuttle = (Mgravitygrad.+Maero+ MRCS+ Mtether+ Mpayload+MRCS plume)
63

Satelliteequationsof motion •
Asat = (1/msat) (Fgravity + Faero + FAPS + Ftether + Fshuttle + FRCS plume)
= 1-10r'sat (Mgravity grad. + Maero + MRCS + Mtether + Mshuttle + MRCS plume)
The tether, as modeled in the SES, is massless but does include stretch.
The necessity to keep track of both the stretched and unstretched length
of the tether introduces one extra degree of freedom. The tether tension
calculated during the previous time step is input to the natural length
differential equation. This equation is then integrated twice to get the
new natural length. The tether stretch (AI) is calculated by subtracting
the natural tether length from the difference between the positions of the
orbiter and satellite. The tension is then calculated, by using the stretch
value, for use on the next time step. In all, there are 13 dof.
Tether equations of motion :
- massless, 1/2 of the tether mass is placed at the orbiter CG and
the other half at the satellite CG
- the tether mass lumped at the two body CGs is assumed constant
- the length (AI) acceleration is integrated :
A I = (RR/JT)(-T D + R R FT)
FT=kAI + 13km*VAI
where :
R R - radius of tether reel
JT" moment of inertia of tether reel
TD - deployer motor torque
64
k - spring constant (AE/I)
13- material viscous damping term
m* - generalized system mass
VAI - time rate of change of stretch
A - tether material cross sectional area
E - Young's modulous of the tether material
Orbiter systems :
The shut'tie orbiter systems are an integral part of SES. These include
systems such as the digital autopilot, star tracker, navigation, etc. All of
these systems have been verified by other simulations and experimental
data. Details of these systems are best found in the shuttle data manuals.
Rendezvous Radar :
The SES has a model of the orbiter's Hughes rendezvous radar. This
model takes the satellite and orbiter state data and produces output
similar to what is available on the orbiter :
1.) range / range rate
2.) inplane / outplane libration angles and rates
3.) line of sight angles and rates
4.) etc.
These data have bias, drift, and random errors introduced to them similar
to those which occur on the on-board Hughes radar system.
65
Atpresent,the TSSsatelliteis modeledas a pointsourcewithperfect
reflectanceetc. Somepreliminarytestsshowthatthis maynotbe a good
approximationandso somefuturemodificationsto the modelmaybe
required.
Tetheredsatellite systems:
The satellite, on the end of the tether, has three major dynamical
components as far as the SES is concerned :
1 .) mass properties - as previously discussed, the satellite is
modeled as a free flying rigid body;
2.) attitude measurement - the attitude measurements, used for
control purposes, are assumed to be perfect (ie. no errors are
introduced); and
3.) auxilliary propulsion system - the APS is modeled as perfectly
aligned cold (N2) reaction jets with step force pulses and perfect
duration. The libration control jets are controlled by the orbiter
pilot via the MCDS keyboard while the satellite yaw is controled
by an onboard control system. The APS fuel usage is monitored
during usage.
66
ENVIRONMENTAL MODELS
Gravity model :
The Earth's gravitational field may be modeled, in the SES, in two
different ways, depending on the setting of a digital switch :
1.) spherical Earth (Newtonian gravitation); or
2.) oblate spheroid including the first three zonal harmonics (J2, J3,
J4) and the main Tesseral harmonic (C22, $22)
Gravity gradient model :
When an assymetrical body, having one moment of inertia less than the
other two, is placed in a non-uniform (non-constant) gravitational field, it
experiences a torque tending to align the axis of least inertia with the
direction of the gravity gradient. SES is capable of determining gravity
gradient torques on the orbiter and any free flying payloads. These torques
may be "turned on" or "turned off" via a digital switch. The TSS satellite
has essentially symmetrical mass properties and thus, gravity gradient
torques are negligible.
Earth atmospheric density model :
The atmospheric density model used on the SES is the "Bab-Mueller"
model. This is an approximation to the high fidelity Jacchia atmospheric
density standard. (See ref. - Jacchia, L.G., "New Static Models of the
67
Thermosphereand ExospherewithEmpiricalTemperatureProfiles",
SmithsonianAstro-PhysicalObservatorySpecialReport313,May6, 1970).
TheBab-Muellermodelwas chosen because the calculated densities are
very close to the densities given by the Jacchia model but the calculation
response is much quicker than for the Jacchia model. The quick response
time is a fundamental requirement of real time simulations. The
Bab-Mueller model is described in ref. - (Mueller, A.C., "Atmospheric
Density Models", Analytical and Computational Mathematics Inc. Technical
Report ACM-TR-106, June 1977). The classical Bab-Mueller coefficients,
as given in the referenced report, are run through a Jacchia calibration
algorithm in the initialization to improve fidelity. Basically the density
(p) is calculated by :
P =Po e(A ÷ B+ C)
where :
Po reference density
A - night time vertical profile exponent
B - diurnal effect
C - seasonal lattitude coefficient
As in the Jacchia model, the sun's orbital position and the effect of the
solar cycle are considered. In addition daytime/nightime effects are
considered.
68

Aerodynamic drag :
The orbiter drag model is a high fidelity model including the orbiter
attitude effects on drag coefficient and reference area. The drag, pitching
, and yawing coefficients are obtained by a table look up and linear
interpolation routine. The roll moment coefficient for the orbiter is very
small and is considered negligible.
The tethered satellite is modeled with a constant drag coefficient and
reference area. This is because the tethered satellite has a very
symmetric surface profile and the atmospheric drag is independant of
attitude. (ie. a constant coefficient and reference area). Satellite attitude
torques caused by drag are not modeled.
Tether drag is not modeled.
The atmospheric drag may be "turned on or off" with a digital switch.
RCS plume impingement :
During reaction control system operation, the RCS plume may impinge
upon the surfaces of both the orbiter and the satellite. This can cause
significant attitude and translational perturbations during proximity
operations.
69
The plume impingement effects on the orbiter are modeled by curve
fitting empirical data derived from test firings on an orbiter (ie. curve fit
constants were developed empirically). These data consider stationary
orbiter surfaces as well as moving aerosurfaces.
Ttle satellite plume impingement model can be made up of several
elements. These elements may be flat, cylindrical, or spherical. If the
target is more than 5000 ft. from the orbiter CG, no plume impingement
effects are calculated. The plume flow is modeled as emanating radially
from a point source, in a direction normal to the nozzle exit plane. The
plume force/moment is calculated as a function of the jet type, distance
from the source, magnitude of the thrust pulse, and the impingement
surface geometry. Details of the jet selection geometry and layout are
contained in the Shuttle Operational Data Book. Details of the plume
impingement model are contained in the SES definition document.
The TSS satellite is modeled as a single spherical plate element.
70
The TSS simulation has the following limitations :
the tether is assumed massless
the maximum tether length is 1200 meters
the reel motor is not modeled
ie. Reel torque = commanded reel torque
external forces do not act on the tether directly
ie. there is no tether drag
- a collision between the satellite and the docking ring freezes the
sim ie. collision dynamics are not modeled
VALII_ATIQN
The TSS simulation on the SES was validated by comparing run data
with data generated by STOCS. STOCS is a non-real time simulation, using
the TOSS software developed at JSC, with an orbiter digital auto pilot
(DAP) modeled.
All of the shuttle systems were validated and are kept valid as an
ongoing task on the SES. This is done by comparing run data with other
"off line" simulation data and flight results.
71

FUTURE ENHANCEMENTS
The following enhancements are being planned :
1 .) upgrading the present reel controller to present MMC standard
2.) modifying the MCDS CRT display to enhance useability
3.) implementing a tether cutting device model
The following are being considered as possible enhancements :
1.) modeling collision dynamics between the satellite and
the docking ring
2.) modeling the reel dynamics with higher fidelity
72

S87- 18822 .!
GTOSS
Generalized Tethered Object Simulation System
David D. Lang
David D. Lang Associates
73
GTOSSGENERALIZED TETHERED OBJECT SIMULRTION SYSTEM
if. PunPosEoE dliLRIL
The GTOSS software system consists of approximately 410 subroutines representing40,000 lines contained in 120 files. Code is constrained to a highly portable subset ofFortran 77, with over 700 pages of documentation describing user operation,equation derivation, and system software design. GTOSS runs on most computers(including: the Macintosh and PC's), GTOSS has been developed under the direction
of the Avionics Systems Division, Johnson Space Center, NASA,
GTOSS represents a tether analysls-complex best described by addressing Its family
of module_ designed to be more or less tightlyassociated as a cooperative whole.
Tether dynamics: TOSS
TOSS isa portable software sub-system specificallydesigned to be introduced intothe envlronment of any existing vehicle dynamics simulation to add the capability
of simulating multiple interacting objects (via multiple tethers). These objects mayinteract with each other as well as with the vehicle into whose environment TOSS
has been introduced. TOSS is incorporated by adherence to a straightforward setof interface rules set forth in the TOSS Interface Control Document, Without small
motion assumption, and _'th complete generality,TOSS solves the tether dynamicsproblem relative to a reference point state defined for itby the host simulation,
Input is designed for easy data identificationand entry, as well as to expediteparametric studies. Extensive initialization options (such as stabilized gravitygradient start-u_ EuLer angle type selectio_ etc,) allow user-friendly run setup.
General tethered system analysis: 6TOSS
GTOSS is a st.nd-.Iona tethered system analysis program, representing anexample of TOSS ha_'ng been married to a host simulation, In order to verify the
TOSS design concept and exercise the TOSS ICD ground rules, it was necessary tocreate a fully representative, yet easily managed simulation into whose
environment TOSS could be incorporated. The resulting union was called GTOSSand has the properties of, and can be viewed as, a system tailored to the
purpose of examining dynamic behavior of general tethered objectconfigurations (space stations, constellations,etc), By contrast, TOSS has alsobeen integrated into a Shuttle simulation (to study TSS), with the resulting
association exhibiting (and rightfully so) the complexity and specificity of an
Orbiter vehicle. The GTOSS host simulation represents a 6 DOF object with 8tether attachment points, GTOSS has an executable code size of about 350k Bytes.
75
FRECEDING PAGE BLANK NOT FILMED
Input and initializationfor GTOSS (as an entity separate from TOSS) is similar to
that of TOSS. GTOSS provides output for itself as well as TOSS by invokingRTOSS (see below) to generate a Results Data Base to archive solution results for
display post processing.
Solution-result archlvlng: RTOSS
RTOSS is the Results Data Base (RDB) Sub-system designed to archive TOSS
simulation results for future display processing. While RTOSS was designedprimarily to capture TOSS data, itoffers a W:'Id-Cardfilewhich can be used by any
users to capture data of their choice. For instance, GTOSS takes advantage of thisfeature to capture its host simulation data to an RDB for display post processing.The modular design of RTOSS requires minimal calls (from the host simulation) to
invoke the creation and population of an RDB (for instance in GTOSS, this act istransparent to the user). At the end of a run, a set of fileswith unique names willhave been created containing all pertinent time history data.
Also inherent in RTOSS are the routines which will extract data from the RDB and
present it in a form most natural for display post-processing. These extractionroutines insulate the user from structural knowledge of the RDB, thus rendering
the user's display software invariant to future changes in RDB design. The RDB canbe post-processed in a miriad of ways for engineering interpretation, as describedbelow.
Simulation result displau: OTOSS
DTOSS is the f:rst of a growing family of display post processors designed toeffectively utilize the RDB. DTOSS extracts data from the RDB for extensive
multi-page printed time history displays. There are currently over 50 differentdisplay formats to choose from, each of which aggregates data selected to meet
various display needs. Users are also invited to add new page formats to createoutput for specificneeds.
Simulation result displau: CTOSS
cross is similar to DTOSS, but is designed to create ASCII plot files(as headers anddata columns separated by delimiters). The same time history data formats
provided by DTOSS (for printing) are available via CTOSS for plotting.In addition totime histories,repetitive tether shape snapshots can be taken in CROSS. While the
plot filesare optimally configured for existing interactive graphics programs on theMacintosh computer, their plot format can be used on other PC's. Since crossgenerates ASCII plot files (which are easily transported between different
computers), it can be run on any mainframe to generate plot files for a PC orMacintosh.
76
Simulation result display: ITOSS
ITOSS differs from DTOSS and cross in two ways. First, it generates outputdlsplay data designed for 3-D animated graphics display of simulation results.
Second, itsoutput is targetted specificallyfor the IMI graphics device (a large, highresolution, fast display device).
Simulation result display: 6ENERAL
The above RDB post-processors not only represent a significant existing display
capability for GTOSS, but also function as convenient templates to spawn specializeddisplay processors. For instance, hooks are clearly defined, and steps aredocumented to modify the existing DTOS8 or CTOSS to add new formats. These
programs can also serve as a functional boilerplate structure for extracting RDBdata to be post processed in any fashion you wish.
B. COORDINATE SYSTEMS and OE6REESof FREEDOM
Coordinate Systems
The following coordinate systems are used in TOSS:
A. TOSS Inertial Frame The user is allowed to arbitrarily define this frame,however, its relationship to the planet-fixedframe must be exolicitlvstated in
the standard TOSS routine invoked to transform inertial frame vector
components to the planet-fixedframe. This routine (and its inverse-routine) can
describe an arbitrarily complex relationship between inertial and planet-flxedframes. As deli_er_ the TOSS inertialframe is defined as one which is alignedwith the planet-fixedframe at zero simulation time.
B.
C.
m.
Planet-fiXed Frame, This is typically an earth-fixed frame, and also the one inwhich all planetary environment calculationsare defined. The user is allowed to
arbitrarilF define, this fram_ however, its relationship to the inertial framemust be explicitlystated in the TOSS routine which transforms planet framevector components to the inertialframe, and environment calculations must be
consistent with its definition.As de//ver_ GTOSS environment routines assume
an earth-fixed frame, the +X axis of which is presumed to pass through theGreenwich meridian, +Z axis through the geocentric North pole.
To_ntrlc Frame. This is a frame aligned along local spherical longitude,latitude,and radius vector to the planet center Itis used for state initialization
options and result interpretation.
Orbital Frame. This frame is defined by the kinematic state of a point, and issimilar to the topocentric frame except the local longitude/latitudevectors arealigned to the current plane of Keplerian motion. Any TOSS entity can have an
associated orbitalframe, which is used for state initializationoptions and resultinterpretation.
77

E.
F.
Body Axis Frame. A body-fixed frame (and a body station reference point) isassociated with each 6 DOF object. The frame and body station are arbitrary,but must be consistently used for defining all body attributes (CG location;
tether attach-points; aerodynamic reference point; etc). This frame is the
reference for body attitude interpretation.
Tether Frame. Each finite tether has its own tether frame. The X axis of this
frame isaligned along the line of sight between the tether's attach points. The Zaxis is orthogonal to the first, but lies sn the orbital plane (of a preferred
kinematic point).The Y axis is defined to complete the triad. This frame hoststhe tether dynamics coordinate solution, and is used for both initialization
options and result interpretation.
Degrees of Freedom (DOF)
Many of the DOF are modifiable via procedures included in the manuals Thenominally delivered GTOS$ configuration provides:
1. Up to 9 bodies (each with up to 6 rigid-body DOF's).
2. A 3 DOF particle dynamics option to eliminate rotational dynamics overhead(for efficientstudy of overall topologicalbehavior).
3. Concurrent simulation of up to 25 different tethers.
4. Tether inter-connection in any conceivable fashion at up to 8 attach-pointsper body. Each attach point is specified by its coordinates in an arbitrary
body axis frame.
5. No practical constraints on tether/attach point connectivity.
6 Tether dynamics simulation as your mixed choice of:
• Massless models (ie.linear springs and dash pots)
•Modal Synthesis finitemodels (on a tether-by-tether, and axis-by-axisbasis, up to 15 modal coordinates per each of 3 axes, with the
evaluative resolution of each generalized force type specifiableat up to amaximum of 30 uniform spatial intervals). Tension is optionallyevaluated either in terms of material strain, or Lagrangian multipliers.
•Point Synthesis (ie. Bead) type finite models (on a tether-by-tetherbasis, up to 48 collocation points per tether; with 3 DOF per point).
Tether can break on tension limits,or be severed at multiple points.
7. Five /ength-rat_ and five tension-profile,data-driven deployment scenarios:
8. Five po_r-profile (amp-1/m/ted) data-driven, power generation scenarios:
• All deployment and power scenarios can be arbitrarily assigned to anyone or more tethers (a tether also has itsown scenario sca/in8factors).
78
C. ENVIRONMENTAL MODELS
Planetary Environment
Subroutine calls to the planetary environment models are standardized within TOSS
so that any levelof environmental sophistication(you have available) can be easilyincorporated into TOSS. Calling arguments to an environment model are: a
sophistication-levelflag; and, a position state in the planet-fixed (earth) frame.Vector results are returned in the planet-fixed frame. Currently delivered wlthGTOSS are the following:
o Gravitational Field Model: Earth; Inverse square central force field_also anOblateness model with 2 anomaly terms.
o Globe Shape Geometry Model: Earth_ Spherical globe.
o Atmospheric State Model: Earth; 1976 Standard earth density, speed ofsound, and temperature model (Sg accuracy to 1000 KM).
o Atmospheric Kinematics Model: Earth; Rotating atmosphere (with localwindperturbations currently zero)+
o Magnetic Field Model: Earth; Tilted,shifted,vector dipole.
o Inertial Frame Model: Planet centered inertial point, with inertial framealigned to planet-fixed frame at zero time.
Entity Attribute Environment
As delivered, all TOSS objects can experience simple aerodynamic drag. Tethers
experience distributed aerodynamic liftand drag. Tethers carrying electriccurrentexperience electromagnetic forces.
TOSS is designed to facilitateincorporation of any degree of entity attributesimulation.
The design philosophy of TOSS has been to provide a useful array of built-in systemsimulation features such as data driven scenarios for: control forces and moments,tether deployment, and electromagnetic power generation; as well as default
aerodynamics options; etc. In addition, TOSS supports arbitrarily complex
simulation of mass properties, control systems, aerodynamics, tether deployment,and power generation, etc. through its documented user-interface data structures,modularized code, and logicalhooks which invite and assist in user modification.
Of course, when TOSS isincorporated into a host simulation, all the system models
present in the host then function in the tether environment provided by TOSS.
79
E. LIMITATIONS
The following summarizes the currently known limitations to the use ofGTOSS/TOSS (also see section below entitled: What should be done next ).
a. Tether Frame Definition:The orientation of the Tether Frame is undefined if
attach point line-of-sightbecomes exactly perpendicular to an associated orbital
plane. Near this state, frame orientation rates can become large, inducinglarge apparent rates of change of finitetether coordinates. This can be avoidedin the Point synthesis model by integrating coordinates in the inertial frame
(thus using the tether frame for interpretation only ). To date, this has notbeen a practical restriction (due to the nature of engineering applications); If
required, this restrictioncan be removed.
b. Modal Synthesis Finite Tether Model: This model is only valid during motionsfor which the distance between attach points is greater than the deployed
tether length (a state of intrinsic tension). Furthermore, cases in whichcyclic slack/taut states are a significant element of behavior may not be
simulated well. In short, while the Modal synthesis model has someadvantages, the Point synthesis (bead) model is significantly more robust andshould be used to establish truth datum.
C. StabilizedGravity Gradient Initialization:Currently this feature applies only tos_mMe cham_ limited to 3 objects and 2 tethers (as a mixture of massless and
Point synthesis models). Multiple disconnected chains are allowed.
d. Certain Environmental Effects (for example, solar pressure effects) are not
incorporated into TOSS.
r. M RS
Validation of TOSS/GTOSS involves three distinct areas: Classical techniques (for
those cases which are simple enough to be described by classical closed formsolution); Comparative techniques (for those cases which defy classicalsubstantiation); and Official techniques (to verify site installation and validate
evolutionary changes to GTOSS).
Classical Vodfication
Officalsolution verificationof TOSS has been accomplished from many directions.First, the simulation of the rigid body TOSS objects are verified via classicallyknown solutions to Euler's rotational equations and Newton's law. Overall
translational dynamics is further verified against classical Keplerian motion.
Massless tether dynamics are verified against known gravity gradient as well asbolo type motions. Finite tether wave propagation and shape verification has also
been accomplished against classicalstring theory.
80
Comparative Uerlflcatlon
Finite tether dynamics have been verified by comparing both the TOSS ModalSynthesis (MS) and Point Synthesis (PS, ie. bead model) against each other and
against a bead model independently develoged by NASA JSC. These comparisons haveaddressed aerodynamic response, wave propagation, and slack/taut behavior.
Electrodynamic finitetether response has been officiallycompared only internallyto TOSS (between the MS and PS models).
There are at least 5 known, actively used, installationsof GTOSS. When GTOSS is
installed, users invariably compare its results to independent tether solutions
previously verified by the installation. To date, there are no unexplained anomaliesin result comparisons of this type.
Installation Verification
Delivered with GTOSS are 18 different input run decks (along with corresponding
officialresults) which test allaspects of GTOSS. A user site compares the output ofthe newly installedGTOSS to these officialresults to verify siteinstallation.
6. ImMI ssomu _ 0Jl_ S0iI
The following features are either planned, or recommended for future GTOSS/TOSSdevelopment:
I. Non-uniform point spacing for the Point Synthesis (PS) finite tether model:
This will allow more efficienctuse of degrees of freedom for solving certaintype finitetether problems.
Non-uniform material properties for the PS finitetether model: This will allow
simulation of tethers which are purposely constructed of different materials asa function of length.
. Auto-transition (on user defined criteria) from finite to massless to finite
tether models: This will allow full mission simulation continuity without thelarge computation overhead associatedwith very short tethers.
4. Improved aero force model for finite tethers: The current model does not
represent the consensus standard for distributedair loads on tethers
Flexible boom attachment simulation: This will allow a certain amount of
attach structure flexibilitywithout full involvement in simulating bodyflexibilityof a TOSS object.
6. While the latest version of TOSS reflects an emission-end-sensitive pLungLngaspect of tether deployment (under small strain), the author does not admit to
knowledge of an ultimate expression for deployment kinematics or dynamics.
TOSS will be continually improved in this area as understanding is gained.
81

H.CASE STUDY5 aMP_l
Examples of Host/TOSS Integration
There are two different instances of TOSS having been successfully introduced intoa host simulation environment: the first of these is GTOSS (described above>; thesecond is called STOCS (Shuffle Tethered Object Control Simulation). The host
simulation for STOCS is a full engineering fidelityflightcontrol simulation of theOrbiter. STOCS is being used to perform mission verification tasks for the TSSexperiment (under the responsibilityof NASA JSC). STOCS is an excellent example
of complex control systems (TSS on-board control) becoming associated with a TOSSobject (which represents the TSS), as well as the introduction of specializedtetherdeployment systems (TSS deployer) into TOSS.
Examples of TOSS/GTOSS Application
TOSS has been used to study enumerable engineering applications of tethers. Someof these are:
i. TSS mission study (STOCS/TOSS, 2 rigid-bodies,both massless and bead modeltethers).
2. A spinmng, orbitalstation ( 6 rigid-bodies, 15 massless tethers).
3. Gravity gradient/Gyroscopic orienting spinning dumbell (2 particles,I masslesstether).
4. Electrodynamic day/night power generation/orbitalboost with tethered counterbalance (3 particles,1 bead model and 1 massless tether).
5. Real-time Shuttle Engineering Simulator (SES) verification (comparison runs
made with both GTOSS and STOCS).
6. Planetary exploration maneuvers using a slingshot mechanism.
7. Electrodynamic pulse maneuvers (2 particles,! bead model tether).
8. Space Station docking devices (3 particles,2 massless tethers).
9. Orbiting, spinning carousel (3 rigid-bodies, i massless, I modal synthesis,and ! bead model tether).
10. Gravity gradient stabilizedorbiting platform (3 rigid-bodies,I modal synthesisand 4 massless tethers).
li. Simulated bead model by chain-connecting 9 TOSS rigid-bodieswith 8 masslesstethers (for bead model verificationstudy).
12. Comparative solution verification studies between GTOSS and an independentbead model simulation (wave propagation, aerodynamic response, symmetrical
slack/taut gravity gradient behavior of a system exhibiting TSS physlcalproperties)
82
TOSS Tethered Object Sub-System
GTOSS [_ Generalized Tethered Object
Simulation System
R__ _ Result I]ata Base sub-system
DY®_ _ Display print R[IB post-processor
C:_(_ _ Chart/Graphics ROB post-processor
i_(_ _ I mi graphics ROB post-processor
83

SYSTEMINTERFACE
HOST c,_- -- l_ TOSS
AEF. PT.
INER. PT.
IINTERFACE DATA STRUCTUREI
• REF. PT. STATE WR/T INER. PT.
• ATTACH POINT KINEMATIC STATES
• ATTACH POINT FORCES/COUPLES
No Orbital State Assumptions
I_ No Small Motion Assumptions
84

GTOSS OPERATION
means
,'ISCII file
6TOSS Optional CRT Iinterectiveinput
OptionalCRT Irun Nonitoring
Ouicklookoutput
file OUTDATA
' e
I Results Data Basefile set run I
I
I Results Data Basefile set run .._
/
I Results Data Base _Kfile set run N
_IR, CHIUED R.OB's
//
,/
//
DTOSS
Optional CRT
interactiveinput
)tionalCRT
run Momtoring
(Similar ROB
processing
For CTOSS
and ITOSS )
85

oFFR EooMfill
19 Bodies (3 or 6 DOF) i
125 Different Tethers j
8 Tether attachment points per body I
ITotally General Connectivit_l
ITether models, your mixed choice of:
_ Massless
_i_ Modal Synthesis (3-D)Up to 15 Modal Coordinates (Legendre) peraxis
Up to 30 Generalized Force evaluation intervals
Tension via strain or Lagrangian multipiers
Point Synthesis (3-D)Up to 50 collocation points per tether
3 DOF per collocation point
Tether sever (on time) or break (on tension)
I Data-driven, arbitrarily assignable scenarios I
5 length-rate deployment scenarios
5 tension control deployment scenarios
5 power profile (amp limited) generation scenarios
86

Input to all TOSS environment routines:
I. Fidelity level flag2. Simulation Time
3. Position in Planet-fixed frame
Inertial Frame ModelTo evaluate this environment, use
EFTEI, EITEF
standard routine
I Gravity Model I GRAV
l'Globe Shape Model I GEOD
I Magnetic Field Model p GAUSS
I Atmospheric State Model i ATMOS I
I Atmospheric Kinematics Model _ WINDS I
87

CURRENT LIMITATIONS
_' Tether-Frame is Un-defined when
line of attach points is 90 degrees
o u t o f t h e orbitalplane
:_ Modal Synthesis model valid onlyf or a s t a t e o f intrinsic tension
•._ Modal Synthesis model dubious
for cyclic slack-taut states
Stabilized Gravity Gradient start-up
valid only for simple chains of up to
3 bodies and 2 tethers (mixed bead
and/or massless)
88
UERIFICRTION METHODS
E_ICLASSICAL VERIFICATIONI
• Keplarian/Newtonian behaviour
• Classical String Theory
I_ICOMPARATIVE VERIFICATION 1
Participants:
• JSC developed bead model
• GTOSS bead model
• GTOSS modal synthesis model
Study parameters:
• TSS Type Parameters• Aero Response
• Transverse Wave Response
• Symmetrical, Un-forced Response
i_IOFF_CleLUteIFiCeTiONi
I_IUN-OFF,C,nL,ER,F,CeS,ONI
89
TOSS/GTOSS APPLICATION
• TSS/Orbiter Compatibility (2 RB, I TH)
• Spinning, Orbital station (6RB, 15 TH)
• Gravity gradient/Gyro dumbell (2 P, I TH)
• Day/Night electro pwr gen (3 P, 2 TH)
• SES verification (GTOSS/STOCS)
• Planetary exploration studies
• Electro pulse maneuvers (2 P, I th)
• Space Station docking device (3 P, 2 TX)
• Orbiting spinning carousel (3 RB, 3 TH)
• Gravity gradient platform (3 RB, 5 TH)
• 9 Body equivalent bead model (8 TH)
• Verification studies (20 - 50 beads)
9O
LMHIRLING
_J
ix::::xcJc::::x
91

I_7 Non-uniform Point Spacing
I_ Non-uniform Tether Properties
I_ Auto-phase transition
I_ Improved aero-force model
I_ Flexible boom simulation
I_ Improved deployment fidelity
Expert, Friendly User interface
92
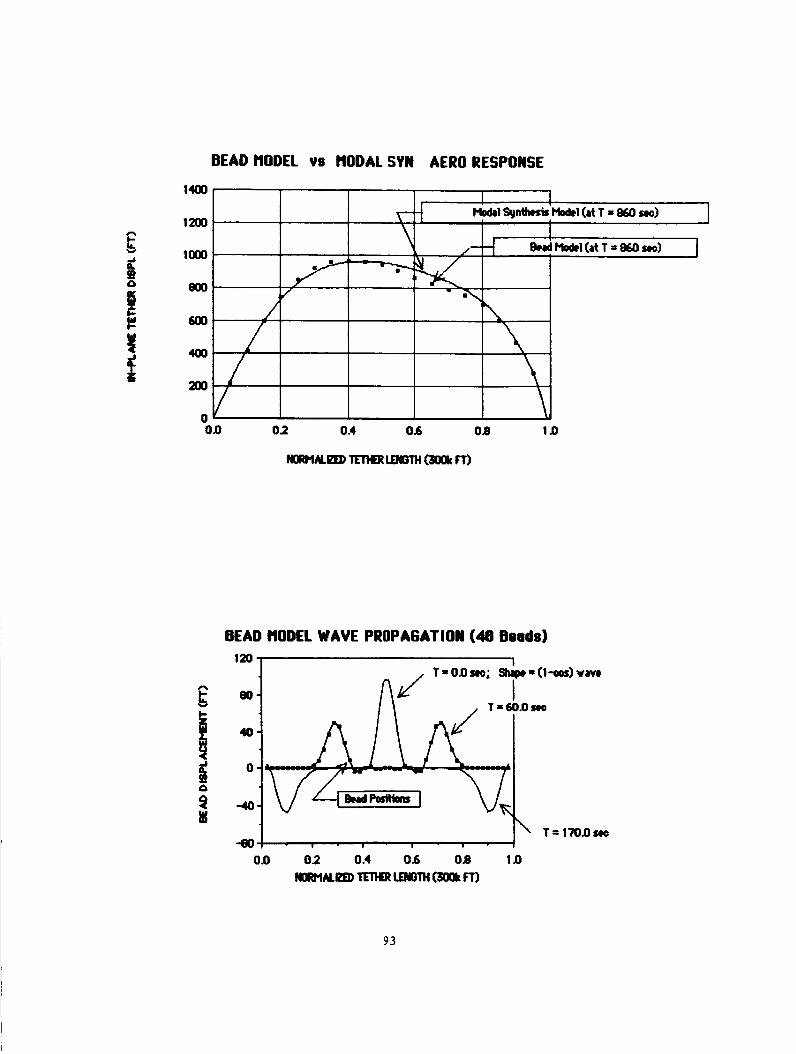
DEAD MODEL vs MODAL SYN AERO RESPONSE
1400
1200
I000
800
6oo
400
20o
00.0
\I
HodalSUnUw_rI_I (atT= _:0 stuo)
02 0.4 0.6 0.8
\
bad Hodel(atT = 960 soo)
NOm'S_i._ TOHnt LBOTH('aXk rT)
/,%I-
ia
I
93

L,IJ
(X:
t,"-
5OO0
443OO
3OOO
2OOO
I(XX)
0
OIW/ttITE POllER 613tl3mtlOtt (55k LEltGnt)
2 3
tSO
IO0
0
-5O
-I00
4
_R
In_m"e_ ir'Q Ir_w'o:ti_
-- _ (VOLT)--- CIJIqlq_NT-AMPS
150
i
! t I
5000 I(X_O 15000Hl611 TI_ (SEC)
$tmtkm tammat
futolNtt Tmmkm
Pi
I
wo
V
"7"a:
mrs
,,-It
I.s/"r
-Jo.
!£it.
!t--
0
1L:llER IIIG _ SFITELLITEItlG at STATIOH
-6 ¸
0 2
ORBIT NUMBER94
3 4

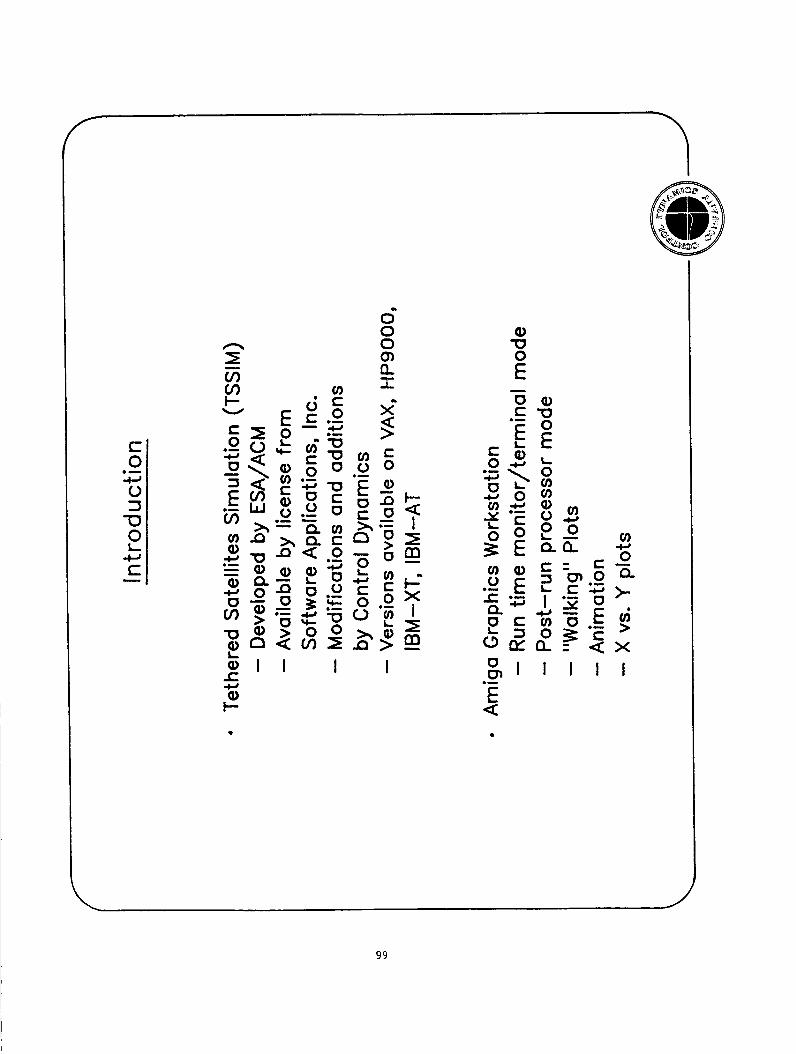
Tethered Satellites Simulation
John R. Glaese
Control Dynamics Company
95

Z
O
Z
0
Z0
Or]
mZm m
Z0
O9
0
PRECEDt_ PAGE BLANK NOT FILMED
97

f
c-O
Om
0
0
C0
Om
Fc"
Cn 0o_
0>" _ ,,--
o _ _ _ _.o _ r..D
_t
J
98
f
t-O
em
¢013
-00L.
.4-/¢-
i
c_
\ J
99
f
CO
E(1)
.+-,CO
CA
(D
Oc-
e_
"O
O ¸(D
e_
00
om
o"_O
L_ZV
>-
m
C;O
e_
O
>N
C;OO
C;em
O
O.0O
X
o o
U_
c- L.°_--_ .E:N
V
®
0:: X
Oc" E
k..O
O Z
Om
O L_> O
C;O >"_=O
._2
><
Oo
e_
O>m
OOO
..2
_>-
@
\
J
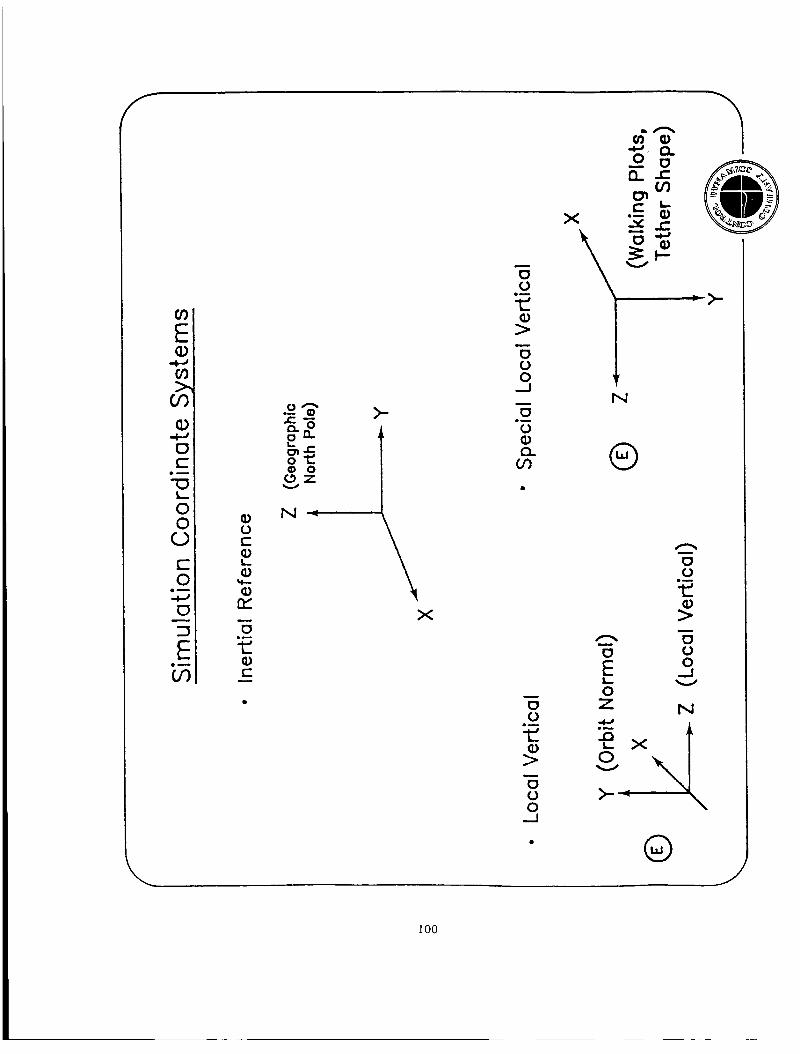
100
I,I
0 O
>_
_)Or)
Q) "0
o_ L
om
IJa.
r-
r"G)
m
L
r-
>_o
r_Q)
CI
i
/
/-
r-Q)
m
.lZ
0
0p-
J
__1
Q)
0 0L
C
0
i
I1)Om
0if')
J
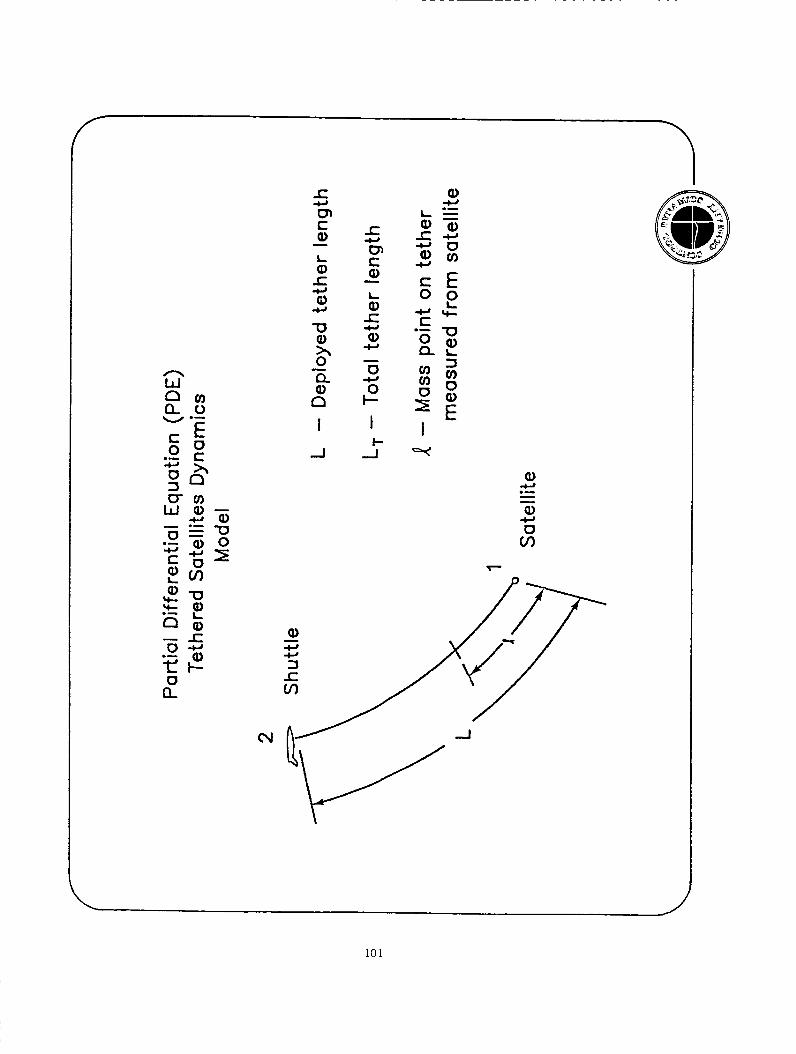
lOl

t-
t-
t- O
L_ 0LL
U 0 L._u. o
_.- L Z
0 r"
i z
"L.I _
I-.I ! _
Ii I
,_. ,-i_c_-,
_ ,-I---2,
II II
zI OI
Ho _"._
t-- 0r-
_- o9
t_m0k..
0Ix_
0t-k..
x
0_t-O
0r_
1:::
.L.
"t:: ___ o.-.
ol _,a:.__ _-_
0
J
102
f
EO
o--
O
E_- OO °--
-+_t_
E E0 0
0
_ E0 _
°-- 0Emr-
E
0
"0 L
_ L
v 0C31 "c
Ol + ,.-I -0E
+ 0+ _--_ '----' r,_)
Zl + O L>_I +
--., _._ E-Q v
+ _1_" ,z. Om:El "_
II II II
vv :L|:L I
m
") E c
E _- L.Q) a)
= E-E>_ -_
o ._ ,..e_
w m >
v
O o oo Ii II II
v
Z 0v
0 I II II
+ _-
,'-,, "El 11 "_" -_,___ ,, --
+ + o-d--2T_,
I Ili !1
J
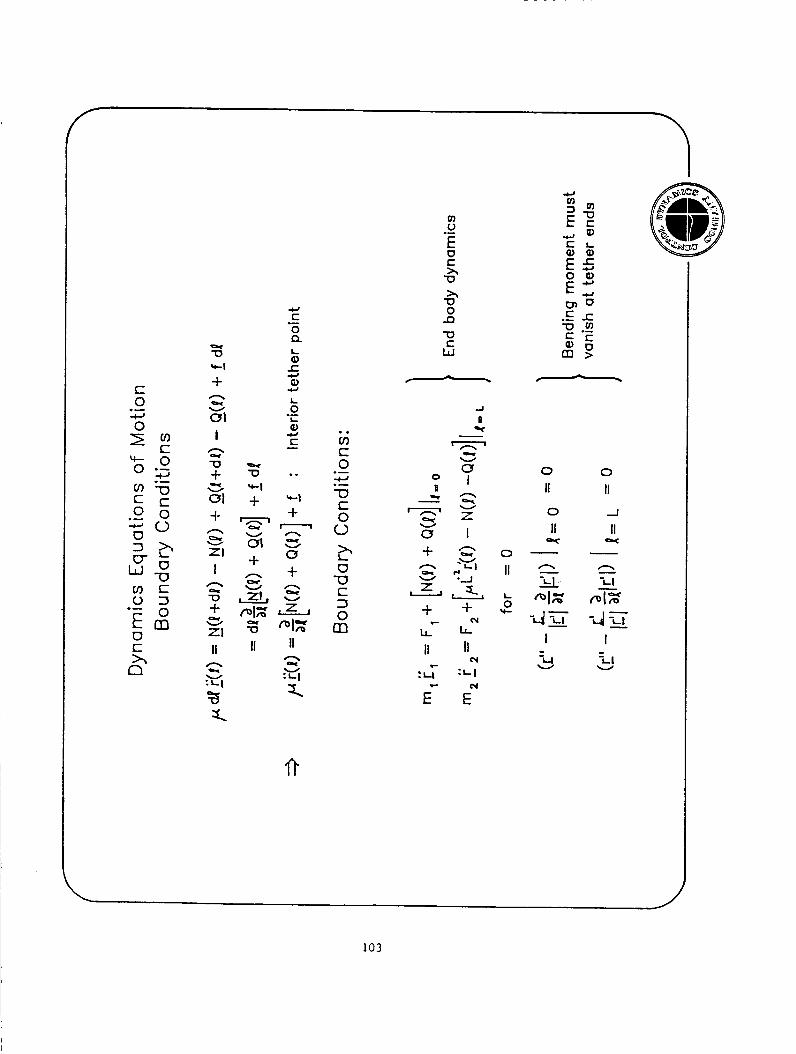
103
f
Z©k--<_r_4
F--i,irr"
o'3
r_
II
r-
C
N
0c"
Co_
F0
L.
F0
0
L_CDc-
O
C0
J_
II
L- I
00
+
00
ct)r--
_1 oo
II II
I
II
"-la.P
N
-t- -up
_-L_, ÷+
.._ :_u I_J
e,JI
+II
"_L_ I:-L_'
II
J
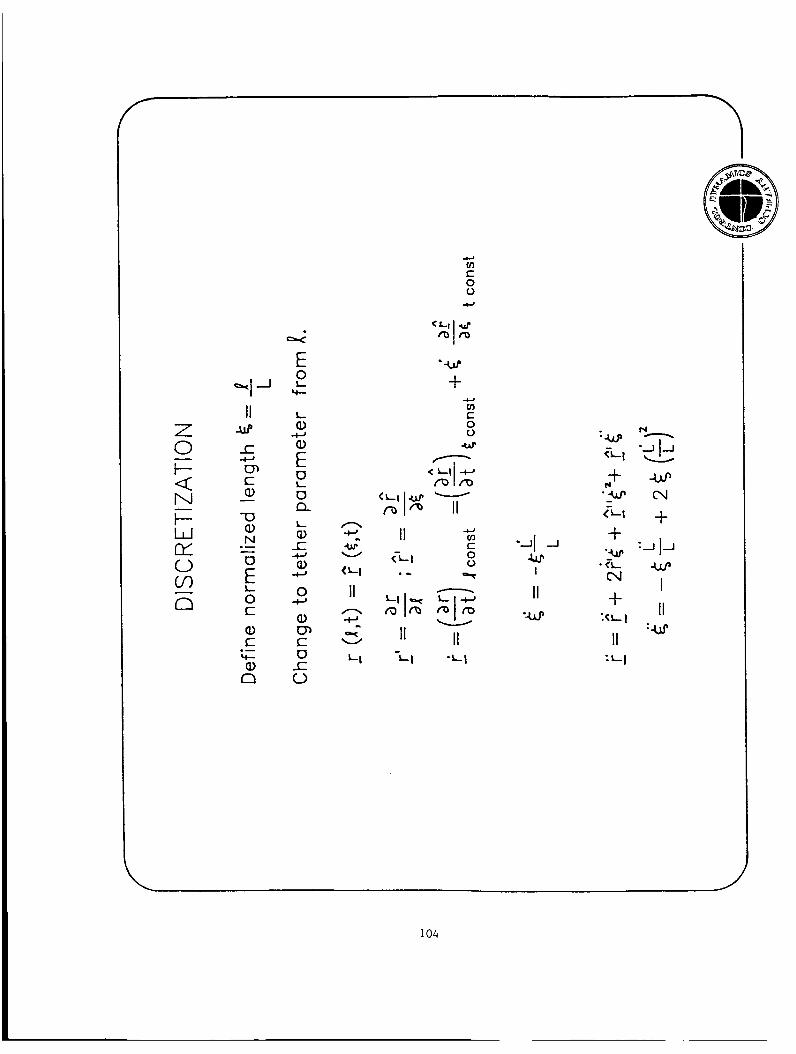
104

f
Z©
"0
I"qr
ILl t-EE: o
(._
O0
_-_-"_-I
II II
I-I >1
-_1
EI--
0I.i--
1-
¢-
E-o0r
f_
c- "_0 _-
C_ 0
o_
-8-o
121 O_ C
ffl
r-" "1_O
q_ CN
"_ "l:J
e,a_ e_
O._!--- "I_
+
J
+
_ I .--- I
t'- c-
II II
_J
_
J I J._ r" ._ t-"
II IJe_
o_
I
+
Ir-
H
J
+
II
_q
+o_
I--I
_4
I
F--I
+
+
t--I
C'4
IJo_
2>1
J
+
>l
II
_q
+
J
I05
f
\
697
CI_
<C]
Of
R-L_J
09D0C)O0
>
I
{-L-I.__1
I
._L_|_J
-- ---Z---
_J
>- >-
+ +
%.---
I I
_ ca.II II
Z
Z
II
71
C'4
Ie-
_--._k
t--- Ie-
l -<LI
Q
_4 Cq
I Ie- !-
I Ic- e-
._1+
+ __ ,e-
l___1 t-
i ZL.t
C_l-,-
,- II c-
__J,..., >"
,r=..
Ir-
il°_
J
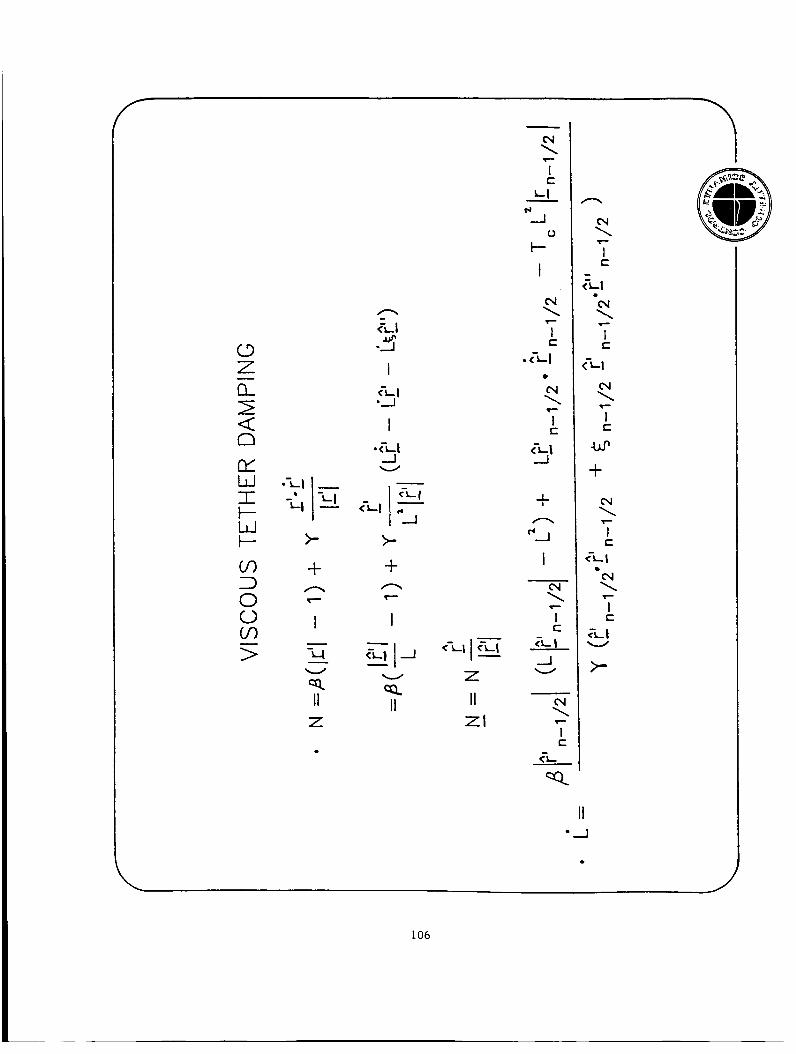
106

f
,,,,,.
I--ZLLJ
>-0__J
O_I,Ir_
r_1,1_J_J
0n_h-Z0C)
Z0Or)ZLLJ
"0
Ct--
L_
C00:1
"_3
J
-0
E
<
o--
O0
0C
o_
C3_Om
0
v
:_J
+
421 .-J ,_ :._J
II II II II
• >',1 ._1 "_1 :._J
o_
r,j')
-oQ.)
o--
o--
-00
co
0
c-(D
0
E0
7-
_Q
c-(D
.t_aX
ILl
b_.
">',l>_1
,+_-!
:i "....I
+ +
II II
r_.m
C
x
C
o
IZ =
I z
L_
II:_._I
I+ =
Z
,+°I +
IIo
I
Z
II
CN
I
Z
J
107
0
o _
2(_9
<
J
I08
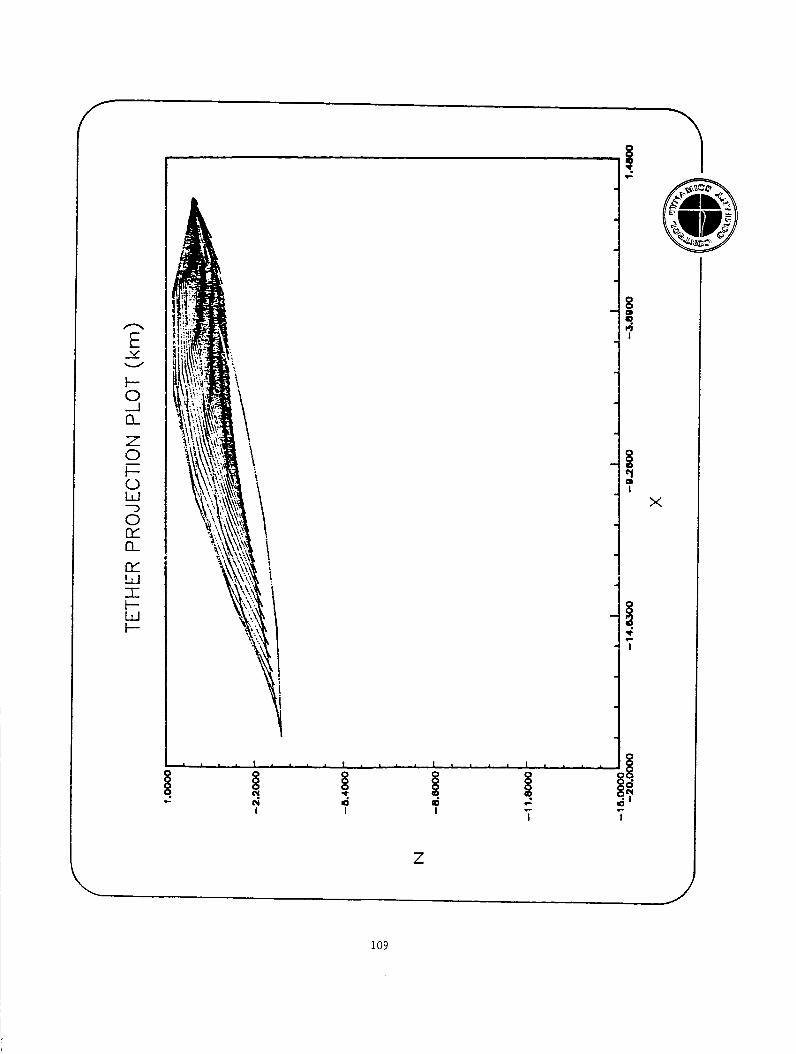
f
E
0
a_
Z0
c_)w
0r_0_
w"7-
W_--
• o
I
gI
!
++!
x
Z
J
109
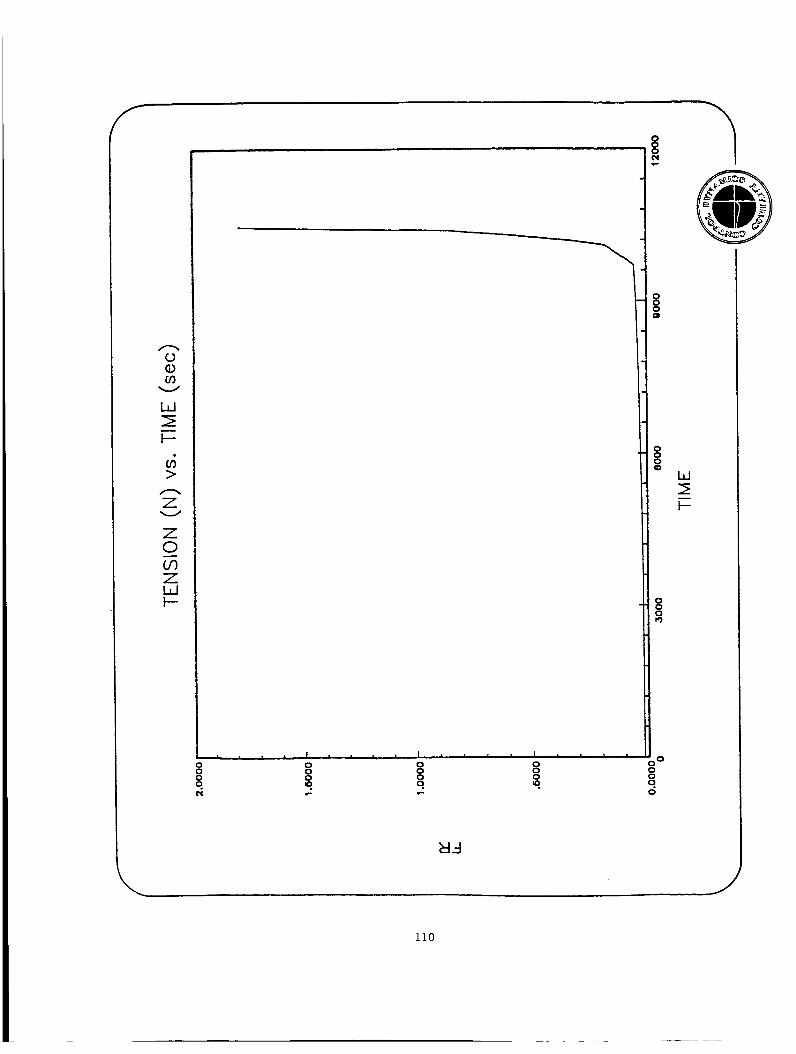
f
V
ZV
Z0
(/3ZW
o0
, !000
v-
I I I I I I
0
o,
i t0O0
000
bJ
g0
o o0oq0
\ J
11o
f
-'I
0')0
E0£::
"0I,-
..c::
0,)
Q)
(b00
mo_
00")
0,)>
0 (""0Om
_E(,/') o_I--.-
a)N_>,0£::0
0,)
c
U
0')0,)r,/)0O
0
"r"0
ID
L.
0_J
t
ffl
n
0
0
ffl
Om
X
E00
n
02_
0m
Q)>O)
"0
L
0
0(/)
0o_
0,,41,=I
I,,,,,
0
o9U
o_
r--o,.oL
£.,0
\ J
Iii

Skyhook Program
David A, Arnold
Smithsonian Astrophysical Observatory
°RECEDING PAGE BLANK NOT FILMED
113
SKYHOOK PROGRAM
Ao PURPOSE OF SIMULATION
• GENERAL PURPOSE PROGRAM FOR SIMULATING THE DYNAMICS
OF TETHERED SATELLITE SYSTEMS
• FEASIBILITY AND DESIGN STUDIES
• STUDY SCIENTIFIC AND OTHER APPLICATIONS OF TETHERED SYSTEMS
_E_EDi_G PAGE BLANK NOT FILMED
115
B. COORDINATESYSTEMSANDDEGREESOF FREEDOM
• RECTANGULARGEOCENTRICCOORDINATESYSTEM
• POSITIONANDVELOCITYOF EACHMASS
• TEMPERATUREOF THEWIRE
• ORIENTATIONOF THE SUBSATELLITE(DIRECTIONCOSINES)
• ELECTRICCHARGEONEACHMASS
116
C. ENVIRONMENTAL MODELS
• SPHERICAL HARMONIC REPRESENTATION OF EARTH'S GRAVITY
• LUNAR & SOLAR GRAVITY PERTURBATIONS
• ATMOSPHERIC DRAG FORCE
• SOLAR, EARTH INFRARED, AND ATMOSPHERIC DRAG HEATING
• EARTH'S MAGNETIC & ELECTRIC FIELDS
• IONOSPHERIC DENSITY
117
D. SYSTEMMODELS
• BEADMODELOF THETETHERWITHVISCO-ELASTICFORCES
• AREATO MASSRATIO OF SUBSATELLITE,SHUTTLEANDWIRE
• TORQUESON SUBSATELLITE
• THERMALABSORPTIVITY,EMISSIVITY, ANDHEATCAPACITY
OF THEWIRE
• THERMALEXPANSIONCOEFFICIENT
• CAPACITANCEANDRESISTANCEOF THEWIRE
• CHARGECOLLECTIONMODELSOF THE WIRE, SHUTTLE,AND
SUBSATELLITE
• ELECTRODYNAMICFORCEONTHEWIRE
• THRUSTERMODELS
• VARIOUSREELCONTROLALGORITHMS
118

E. LIMITATIONS
• COMPUTERTIME ANDMEMORYREQUIREMENTSINCREASERAPIDLY
WITHTHE NUMBEROFMASSPOINTS
• RESOLUTIONOF WIREDYNAMICSIS LIMITED BY NUMBEROF
MASSPOINTS
• RESOLUTIONVARIESDURINGDEPLOYMENT& RETRIEVAL AS
BEADS ARE ADDED OR SUBTRACTION
• INDUCTIVE EFFECTS NOT INCLUDED IN ELECTRODYNAMIC MODEL
119
F. VALIDATIONMETHODS
, COMPARISONOF SIMULATIONSWITHANALYTICSOLUTIONFOR
THE BEHAVIOR
• COMPARISONOF RESULTSWITHDIFFERENTNUMBERSOF MASSES
• COMPARISONOF RESULTSFROMDIFFERENTSIMULATIONPROGRAMS
• EXAMINATIONOF INTERMEDIATECALCULATIONSDURINGDEBUGGING
ANDCOMPARISONWITHHANDCALCULATIONS
120
G. WHAT SHOULD BE DONE NEXT
• MODIFY SK-YHOOK TO MAINTAIN RESOLUTION AS WIRE LENGTH
CHANGES
• COMPARE RESULTS OF BEAD MODEL OF WIRE WITH MODAL
REPRESENTATION
121
o_ Poor c_J_
Ill
I)N
gtL
0
E
U'O
123

ORIGINAL PAGE IS
OF POORQUALrrY
O0"Olt
124
SLACK3
Gordon E. Gullahorn
Smithsonian Astrophysical Observatory
125
<
04-)
_JE_
0
0
0
0
<U
Z_o
L.) _,o
Z
m
r,.)
Z
0
<
0.-_
0
U
< < 0
_ E_
Z0I-4
E_I
i.-4
=E_
U
= <
_-
_-.
I-t
0
0
<
0
E_
_._
0
co
E_
>
0E__DZ
g0
0
0k-t
<
U
Z
=E_
127
__ P,_,GEBLANKNOTFlUmEO

0
I-4
o_
U
o_0
r_z
r_
Z0
0Z
tn
_" w0
LLI
w
0<
Z
Z
I-4
cZ >
1"-'4
H
Z
_0_
ZZz_
t-4
_ _ • •
1"-4
Z Z
0__0
0 _ _
m _
m_
_.0_
_ m
_0
m
Z
0_
Z0
_0
Z
0
Z mO_
Z0
Z0
Z
_0Or.)I
OZ_0
I-4
O_
O_Z0
Z.,_
.Z_0
O_I-4
_0
128
Z
0 _
m _Z Z_ _0
o_ _ __ _ 0_
_ dzo
_ __0_
>_ _z__
_ _.,___ _o__oDZ_ i I _ I _ _
_ Z _
_ •
_ 0
Z _m 0
_ m
mm_ m
_g_...
129
130

Gi4iG_i%_L P_C_ _S
SLACK3 INPUT PROMPTS
These prompts define the parameters available forspeciflcatlon by the program user.
THE FOLLOWING PARAMETERS AND FLAGS HAVE DEFAULT VALUES ANDMAY BE CHANGED BY ENTERING THE DESCRIPTOR IN THE FIRST COLUMN.
ORIENTATIONTETHER.PROPTETHER.ANGLETETHER.TENS
DISCRETIZE
ORBITDEBUGSEG.LENGTH.RANDOMSEG.SLACKSEG.DIRDRAG.FUDGEBOOM.PROPBOOM.ANGLEBOOM.PHASEROT.AXISROT.RATEOFFSETREL.ABSBURNSCUT.FREERUN.TYPE
UP/DOWN TOGGLE IS: UP1 DENSITY 1.40 E 0.14D+12 CV 0.30D+09 DIAM 0.30PITCH 0.00 ROLL 0.00
ORIG LENGTH(KM) 20.0 SS MASS(TONS) 0.50TENSION FUDGE 1.00
LENGTH RATIO, ATTACHMENT/TIP: 0.50QUADRATICNESS (0_LINEAR TO i): 0.50HEIGHT (KM): 295.0 ATM. DENS.(G/CC): 0.27D-13DEBUG OUTPUT TOGGLE: F% SEGMENT LENGTH RANDOMIZATION: 5.0SLACK FACTOR: 0.95 % RANDOM: 5.0SEGMENT DIRECTION RANDOM : 5.0BALLOON DRAG FUDGE FACTOR: 0.75
EI,LENGTH,WEIGHT (NASA UNITS): 0.13D+09 849.0 106.2PITCH, ROLL: 0.0 0.0PHASE AT T=0: 0.0DEFINING ANGLES, PITCH & ROLL 90.0 0.0
RATE & ACCELERATION (DEG,SEC): 0.00 0.00X,Y,Z (METERS): 0.00 0.00 0.00RELATIVE/ABSOLUTE OUTPUT TOGGLE: REL0 THRUSTER BURNS. (MAXIMUM 5 )
CUT TETHER FREE AT T = 9999.9BREAK
THE FOLLOWING INPUTS ARE ALWAYS REQUIRED:
ENTER RANDOM SEED, ODD INTEGER < 2147483647NUMBER OF TETHER SEGMENTS? 3 TO 50LENGTH AT TIME OF REEL JAM (KM)?(The program now computes: )A CRUDE TIME SCALE FOR RECOIL, NEGLECTING GRAVITY
GRADIENT, IS: 1329.333973151609HOW LONG (TETHER-SECONDS) TO COMPUTE?HOW OFTEN (SECONDS) TO OUTPUT?SET A LIMIT ON # OF BOUNCES (INTEGER):
131
Z0
_:_0
0 _ u_
_<_
_. Z _ -_f_O_ I-
ra r..)<_ D_ <
0=__Z U_
CO
_m_o
Z u_ _
_Z<
B U
E_0
0
i-.q
_B<
<
<dm <
I--tm
_0
z
m _r_ z
132
_fj
0
Z0H
<
1"4
Z Z
_Z_Z__Z<_>_0_
HO_
_0_
0 0_ ZZ
O_ _Z
O_ _0
_Z_Z
_0 _ _ Z_
_ ZZ_O_
Z_
Z _<Z_
<_ O_ _= dd_ _0
_0 _= _ZH_0 _ ._>
_0
0_
OZ_O_
OM_m
._<Z_0 Z__0_
Z_0_
_00
_0
O_
M_H
00_
Z_Z_
133
0
<1..1
f_
0
_8 _
Hz•
Z 0 _ U I _ wO_ OH_ _
_0_ 0
_Z_
o_=:z
__0 H Z
• • • • • • _ •
134

r_Z0i--iE_
0
r_
-ZH
o_Z
,o
• • •
Z 0
_- r.r.l
r..) u_Z
0
Z 0o _
00_ _
Z_
_0_,_
O_E_
Z • • • •
Z0
135
H Z _
_ _ O_
t.-t _ ' °
0
136
8
i
gi
g
E'
u.r
)
_mo.oooloo
ORIGINAL PAGE ISOF POOR QUALITY
QO.OO -_O.oo -ko.oO -bO.O0 -'loo.oo -'lao.oo -'l,lo oo -'aso oo -'leo oo -_oo.oo -_zo.oo -_mo.oo -_so.oo -_eo.oo -_oo.oo .')z,IN-PLRN[ COMPONENT IM(T(RS) mlO'
i lll llIIIIIllIllllIIIIi(l(tlltlltlII
_,L oo;N : . . . " . -vooo -',oo.®-',ooo .',,ooo .,,ooo-,,,v.oo -_oo.®-_ooo ._,,o.®.:,,oo_ ._,o.oo_o O0
OuI-OF-PLANE [.OHPON(NI (IqEl"ER$)
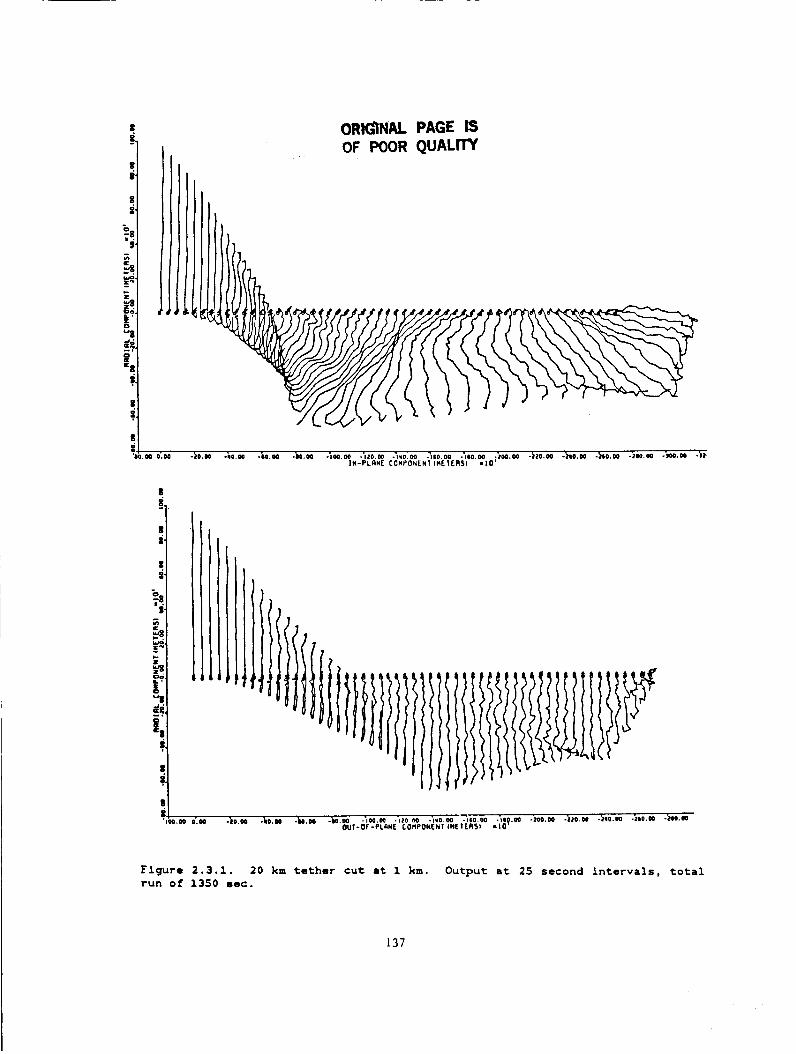
EAgure 2.3.1. 20 Mm tether cut at i Mm. Output at 25 second intervals, total
run of 1350 sec.
137

_ORIGINAL PAGE IS
OF POOR QUAIJ'rY
t
m
o- .
_g
Ell
!
too.oo o'oo
L
-_o.oo -_o.oo -_,o.oo -bo.oo -'_oooo .'m.oo -;..oo ,-.o.Oelo. -'.o.oo -_oo.w -Im._ .:m.oo -_,o.ooOUT-OF-PLRN( COMPONENT IMET(R5)
8iI
=-
i.-z
I
|
nr_
.1,o._ .ko.oo -ko.oo .be.w, -'_oo.oo .'lao.oo .'.o oo .".. -'.o.. ._o.. -_zo.oo ._mo.oo"
IN-PLRN( COIqPONrNI IMET[RS) .10'
EIQure 2.0.4. Am for El(;. ).J.1, except: Thrusters directed mlong-orblt,
cutoff miter 20 mecond burn, totml run of 1200 seconds.
138
8i
8
i_8
8
_00.00
• ORIGINAL PAGE IS
OF POOR QUALITY
o:oo -_o.oo -;=o.oo -ko.oo -ko.oo .'too.oo -'_ao.oo .'=,=a. -'tSO.N .'loo.oe -k,O0.O0 ok,ao.mOUT=OF-PLRI._.COMPONENT114(TERSI ra|OO_
o.
=;
¢1¢_.
'=8
._.oo -_o.oo -I_.u u (m .'=oo.oe -'lao.oe .%a.w -'.m.oo -'_m. -l,_.oo -_eao.oo -1,qo.w ._io.oo -;_.m -' .IN-PLRNE COMPONENTIHETER$1 =10°_ M uo
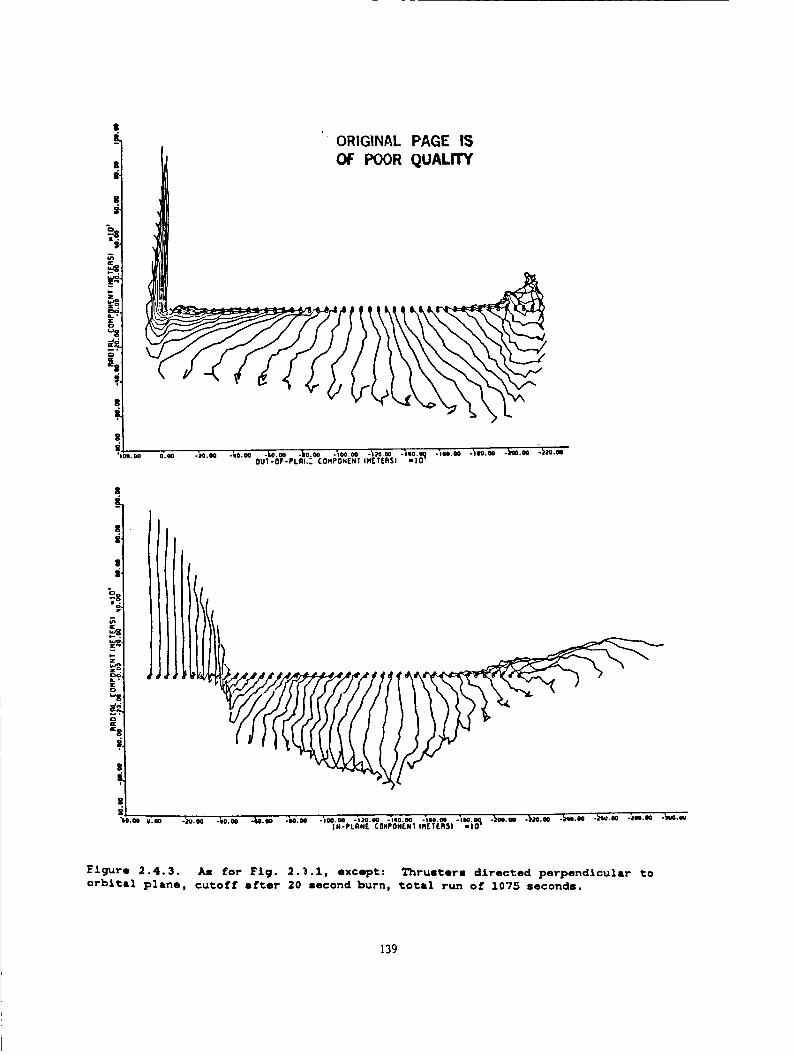
Eigure 2.4.3. As for ELg. 2.3.Z, except: Thrusterm directed perpendicular to
orbAtsl plane, cuto£f after 20 second burn, total run of 1075 seconds.
139

Artificial Gravity Laboratory
Enrico C. Lorenzini
Smithsonian Astrophysical Observatory
PRECEDING PAGE BLANK NOT FILMEB
141
J_i_i_,_ ! _ _, _ •_,_._r _ I_I¸_ _
O_
_0_
_ozx_o_
_ HzI-'t
N_ z
d
I--t
H
[-t
zoo[_
mOZ
o
0"1
t,0,-4O(D
_.OfO
I
<
zu_
EZu4OOm
143
PRECEDING PAGE BLANK NOT FILMED

G_LLI
144
Ul
Ul
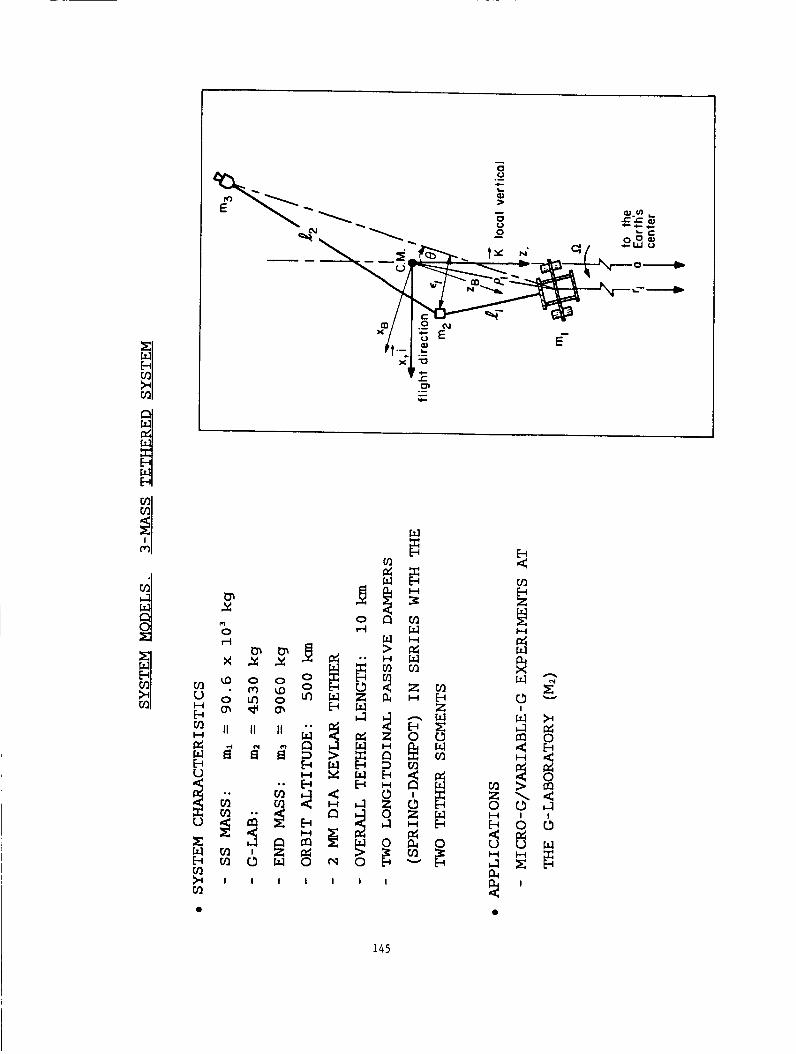
._! _ _o _
o ,'_ _d H
_J o m o m __ _ O_ _ [.,-I Z ,
o_
l I I I I I I
_ '
145
0
I-4
,--I t'_ l.i") _
i....I_ o_
I i t l I I l I I
I
<
Z
[_ _.Z H
F'M
0
I-.4
t
0 -----_
D
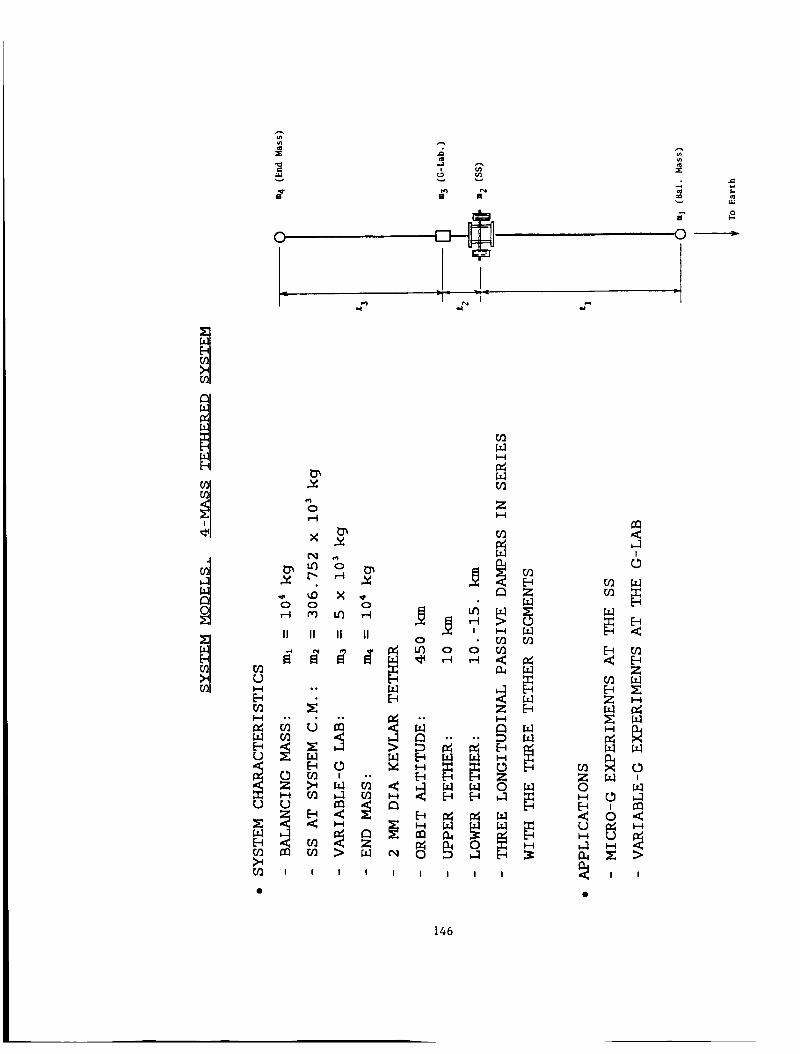
146

I-,-
0I-4
0
ila0
A
I
o_
I--IUul0
,<
'o_i.t.1
Z
M
0I-4
o
_ 0
0 _ r_ _ _ _
i _ i 0 0_
147

REFERENCE FRAMES AND COORDINATES
X
m°
oi
ml
r i
mi+ 1
/I O'
!II
II
III
I
I
+1
/
/
• INTEGRATION VARIABLES
- CARTESIAN COORDINATES OF
THE N MASSES WRT. LH-LV
• STATE VARIABLES
- TETHER LENGTHS: L_
- LATER DEFLECTIONS
•IN-PLANE COMP: ¢i_
•OUT-OF-PLANE COMP: ¢o_
- IN-PLANE ANGLE: 8
- OUT-OF-PLANE ANGLE:
ZI
148
w
H
00 X
• _-
, _ _ ,_,
149
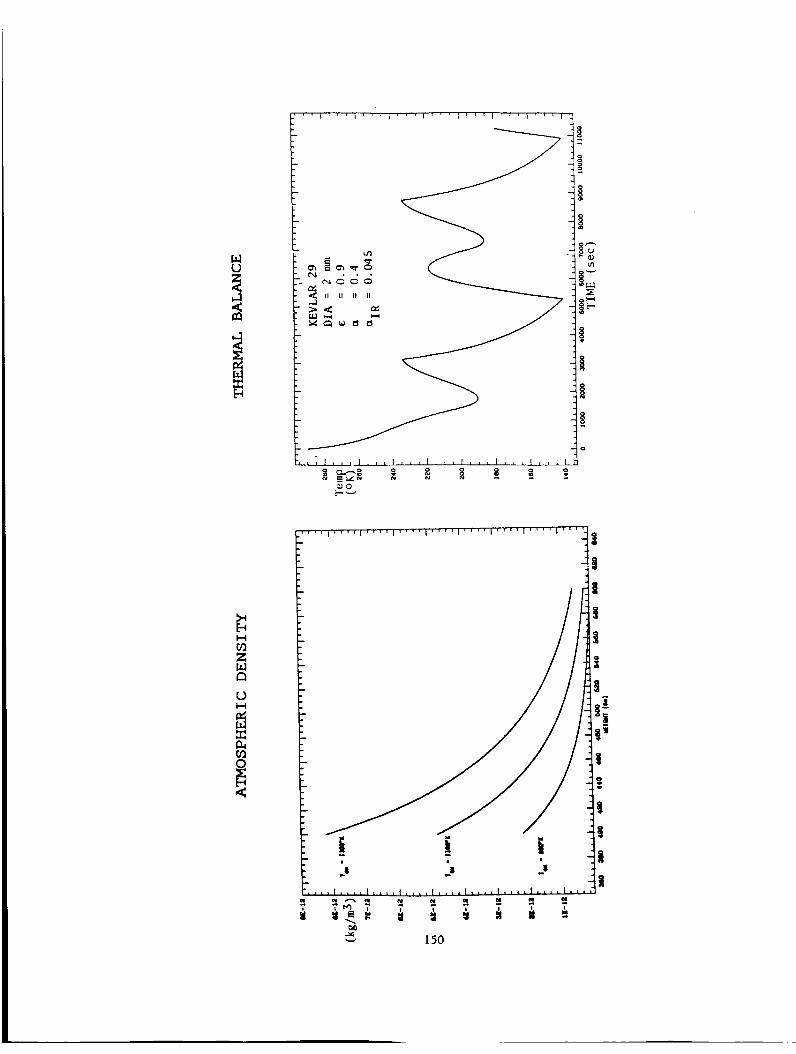
'' I'' 'i'' i'' '1'' '1' '' i' '' I ' ' ' i
II II II II
1
"._.._._._.1_ 1 i i i I.I , , I , , , I , , , I , , i I i i i I
_Q
I'--I
Z
U
I:I:I
150
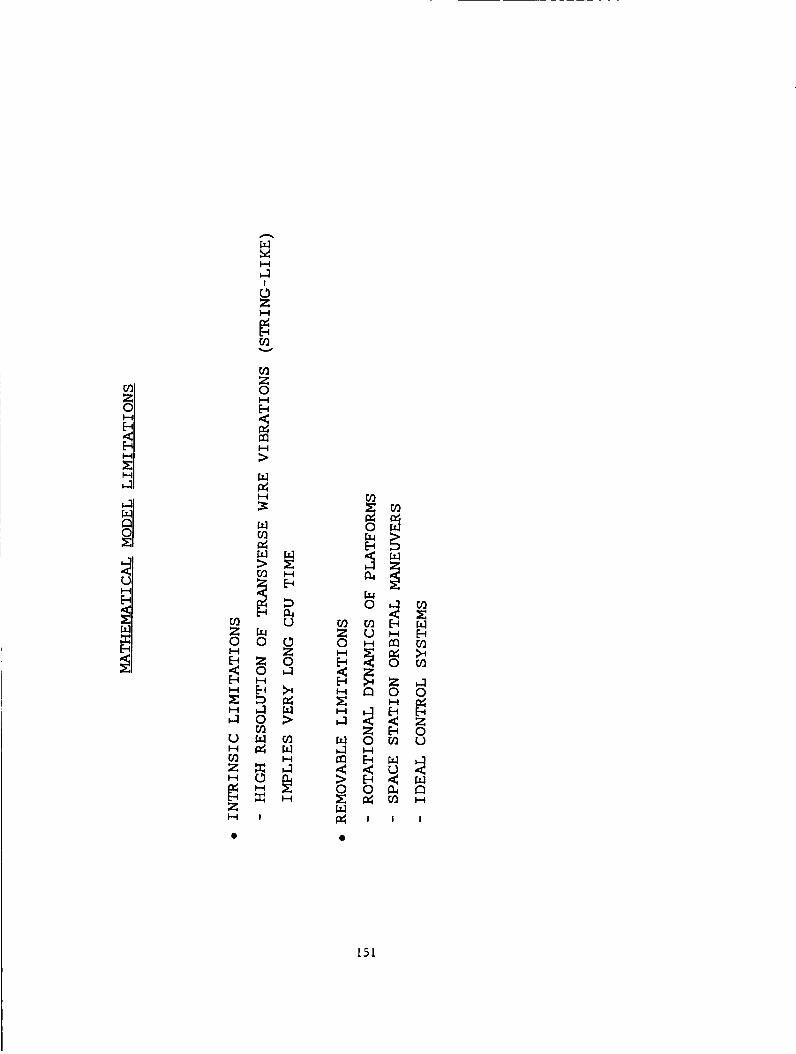
O
H
k-
L
H
I
OZH
ZOH
H
>
>
_ _ _ 0 0
Z M
151
o_
H
o0
0 Z
_ Z0 _ m_ _ Z
0
0
0
_ 0 0 Z0 _ _ _ _ 0
0 _ M_ _ _ 0
_U _
152
U >.
0
D_
r_Q
0
Z0 >UI !
D-I
r/l
,_ _ _ _ _ 0
\_._._ _ uo
> _
,, ,, ,, o_
_ _ _ _ _ _ _ N_ _ _ ,_ _ o _
_ H Z 0
• • • • Q
153
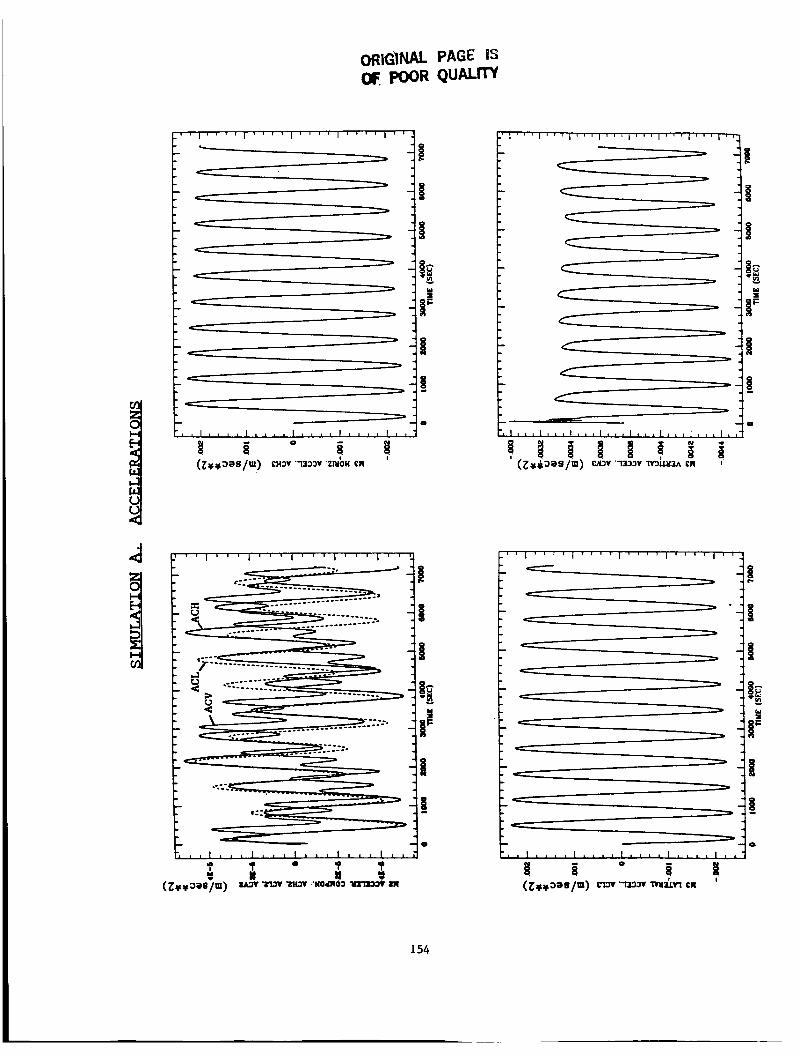
ORIGINAL PAGE iS
Of.POOR QUALn'Y
, , i, , , ,i , ,, , l, , , , i , , , , i , ,
.
c
c
c
c
c
c
",,I,,,iliilll .... I .... I,,_
t i = i !
!
!
!
!iIIi
11
!
• '1' ' ' I ' ' ' I' ' ' I' ' '1 ' ' ' I ' ' '1 ' ''1_
J
C
",t,,,I, ,,t,,,I,,,l,,ll,, ,;, ,,I,
(_li::)as/m) c_v '"nuOv "linbl_ ii
I
i
1:
!
-.|
I'-'1
{/l
' ' I .... I .... I .... I ' ' ' ' I ' '
-
cCC
cc
c
", , I .... I , , , , I , , , , I , _ , , I ,
(_ll_ag/i) C'l.lv"lal._=v_ Cn
!
1
1
-|
o
t54

.... I ' ' _ ' I .... I ' ' ' ' I ' _7 ' ' ' I ............
l I| .|
s -.!
a -
_ ,',',', il;,_,2_ '_";. ;; ;,,;
||
l_ 1|_
!| :l| |
,I,,, ,I,_,,I,, ,,It,_,l ,_ I,,,, I,,, , I, i i i I i I I , I ;
| | ° i 1 _ _ ° i t
155

ORLGLNAL PAGE IS
OF POOR QUALITY
SIMULATION A___. SIDE-VIEW
NASS STnSOL
÷
,_ _x
.- . ." , .*_m n aQ.4am ,,alam i_ im ,HI u .;_oo -,,o ¢o -,_ N -,o_.am .'h_ll a_l • -_l,m,llIIm-PLAm*[ CO.eON[NT _.[T[_SI
; , . . . . . . . .bollII .ill.m .Nil 1111,ll ._l_o.m .:Im.m N u kao I ._lOmm -N.Io .:iTlo.lm.ImaO.lO .iNOm -'lUO.OO N • -lll*.ll -IMIImll
- Expanded Stele, S_de-V£ev Plotted Ever? 40 Sec for 7200 Sec.
156

ORIG1NAL PAGE IS
OF POOR QUALITY
SIMULATION B. SIDE-VIEW
MRS$ StM80L
| 1=3+_x
,
• .m Ilm.u _.m '_.os amo_ 4,o.i _ u .'_..o.as -',N. u ._. so -_t.m ._.as -_.n ._.=o -_m m 4_ m
IN-PLA_( COMPONENTLM(TE_$1
." . . . II,te I II I im I." . ." . ii,ml 21 . iml i=,wI ,ml -" • _ . iwaI _II - • -" • _ -uuMi imml0 -" . ilew ." . . . _ml tll lisa,
- Expanded Scale, Side-View Plotted Evmt-I &O $e¢ for 7200 See.
LonIltudlnal ÷ In-?lana Librational/Lateral Damperi On.
157
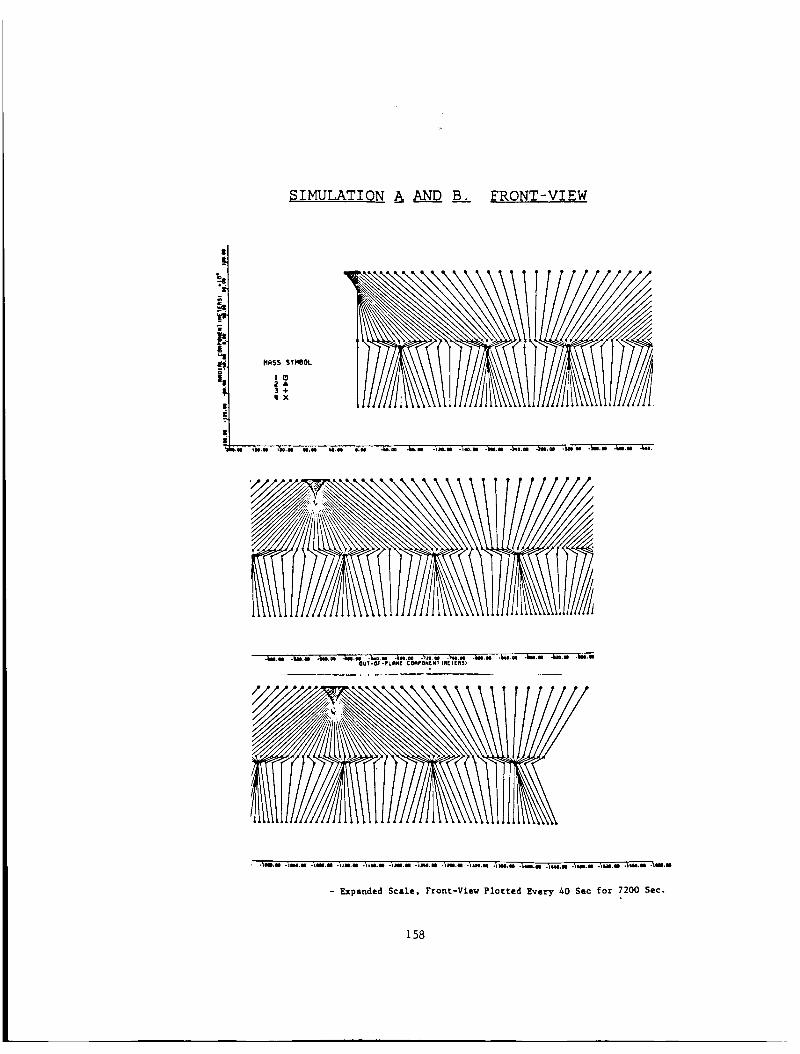
SIMULATION A AND B. FRONT-VIEW
o,
HESS STHBOL
! 0_A3+
_X
_.m .haNm.m -11*e.m _._ -_o,u -kum -'1_.m -_.m _ i -_'-e.w -i'**.m -b._o.mOUY-OF*PLAmaE C0#PONLNT IR[T[#_SJ
, .'in. m .'ION .• .'laal . u -'lla .m .'lla. m -'ira . m .'lamQ.m -'Ira . a -'l i,..11. a .'IN*. m -'l,la.i . m .'iN, a,. | -'LW. m -'ira . m .'ira . u .'_um. m
- Expanded Scale, Front-View Plotted Every 40 Sec for 7200 $ec.
158
Z0
H0Z
I--I I--I
Z 0 0
Z_ 0 0 0
0
_-I _ _ _-I 0
__ _\_o z
o_ _ __
_ °_ io _ _ o_
0
159
Z
ilaO
c)I,--I
I-N
I-'4
,-I CW
O
U
ul
H
Z
O M
M
m M 2
mm M +
M M
m O
O
Z0 _ _ Z
m 0
0
0
O
:zF-t
121
O
O
121
NI--I
LIUl
0 0
FI C_ <I
O Or_ _ 2; u
,
Mm _ _ U_ Om M O O
OE--t bl m
i _ < Z
Z _ Oisa H i.v-I I:_O _ _.. O Z
_ O
ul ul m
Z
O _ _O _ _ _ __/1 ila
Q
160

Elasticity Effects in Tether Dynamics
Silvio Bergamaschi
University of Padova, Italy
161
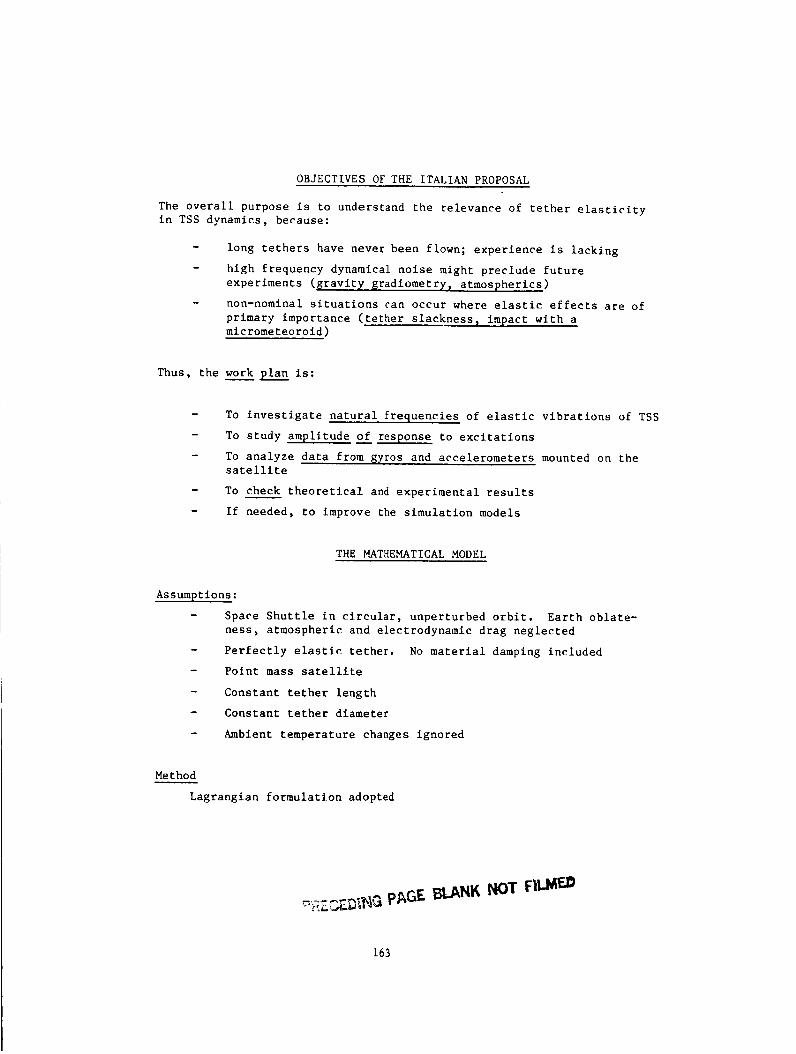
OBJECTIVES OF THE ITALIAN PROPOSAL
The overall purpose is to understand the relevance of tether elasticityin TSS dynamics, because:
long tethers have never been flown; experience is lacking
high frequency dynamical noise might preclude future
experiments (gravity gradiometry, atmospherics)
non-nominal situations can occur where elastic effects are of
primary importance (tether slackness_ impact with amicrometeoroid)
Thus, the work plan is:
To investigate natural frequencies of elastic vibrations of TSS
To study amplitude of response to excitations
To analyze data from _ros and accelerometers mounted on thesatellite
To check theoretical and experimental results
If needed, to improve the simulation models
THE MATHEMATICAL MODEL
Assumptions:
- Space Shuttle in circular, unperturbed orbit. Earth oblate-
ness, atmospheric and electrodynamic drag neglected
- Perfectly elastic tether. No material damping included
- Point mass satellite
- Constant tether length
- Constant tether diameter
- Ambient temperature changes ignored
Method
Lagrangian formulation adopted
_RZC,F.D_NGpAGE BLANK NOT FILMF_
163
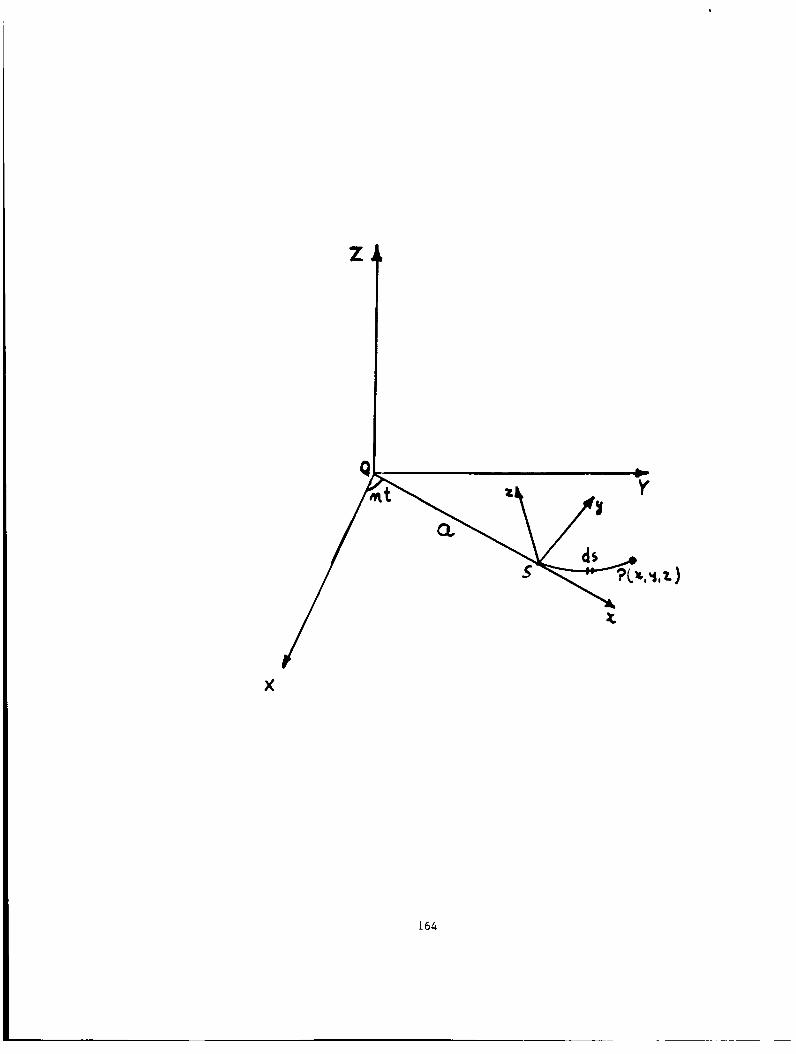
Z
X
164

TF_ L _Q e_ r_ (_I f_ li bFti _,ITY
K L_ t_ic. _ r_,/"
1
v'_=, ZEA
G _Q.v;._q.Lo_,_._._"_,oL_,! •
_, : _,- _.'_,o_. _ tm ,_.
165

if,
_l_,_:_,l_"_ _l_,_)
_s_: _y-
166
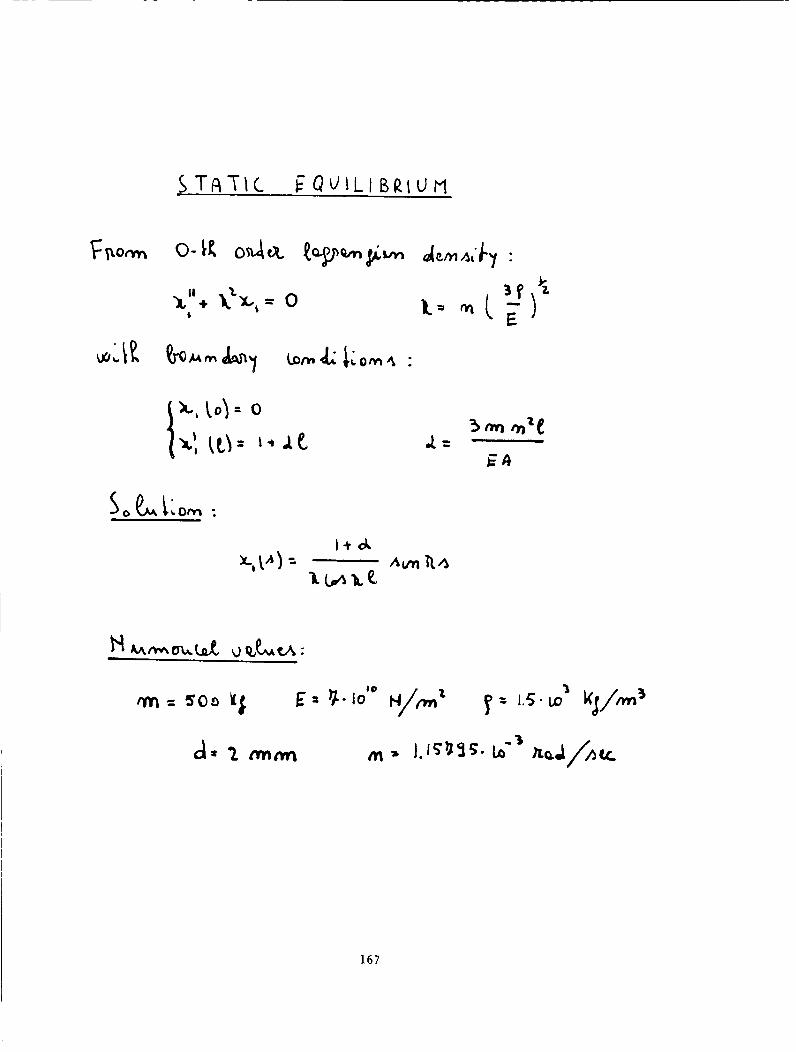
.£ TA Tl(_ _ Q UIL I BtZi O 1',1
I
_-,1,4- oI
° &, l:o,,, -
167
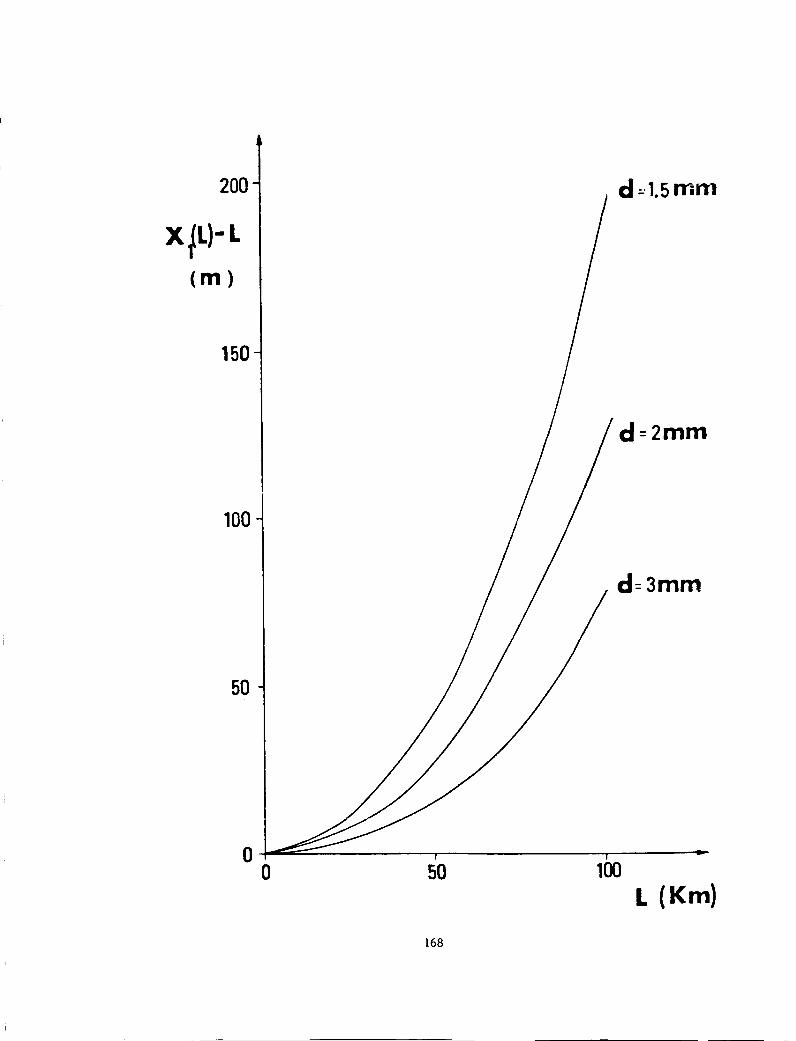
200
XIL)- L
(m)
150
100
5O
00 5O
d: 1.5mm
d- 2ram
d 3ram
1
IO0
L (Km)
168

DYN/_ N IL/_L E"Q V/_TION S
_,.- ; _"-,. zm _!_.-_,,_'x,-- o
!
_,',',,_,-/ co,,-,_ J._o,.,,._-
da_a; i'),-
zT. (o,,_ -- o
169
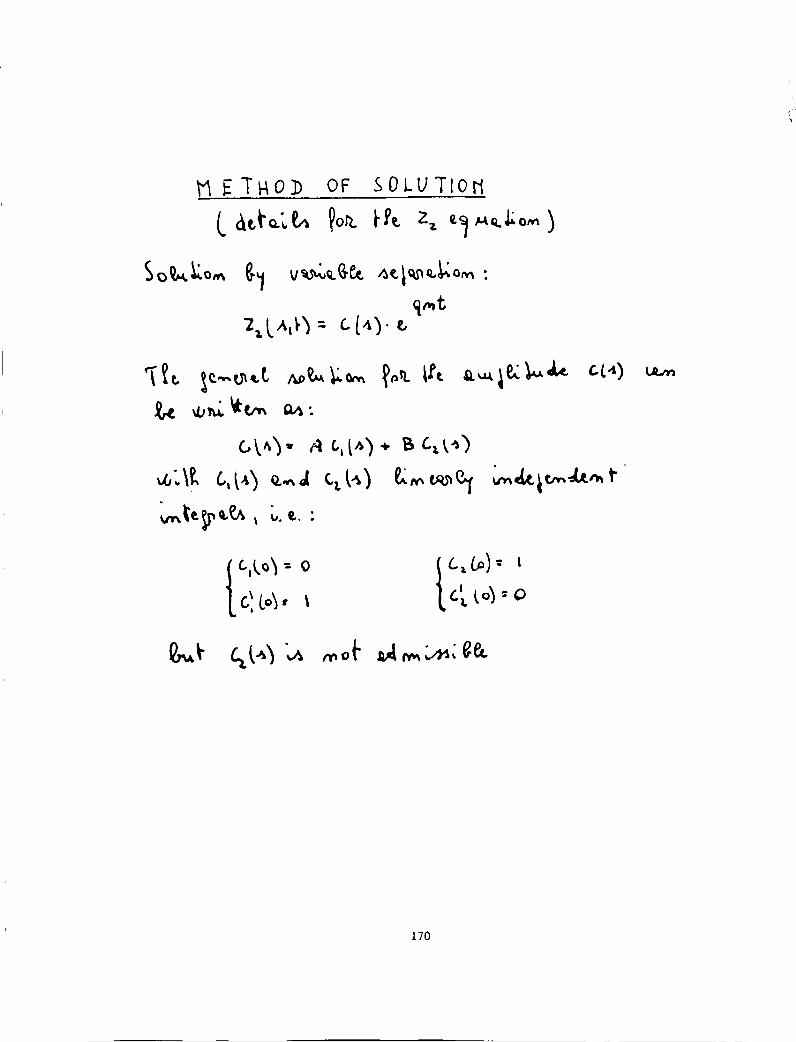
cf.,L)
c,t,o_: oI C=O=): i
170
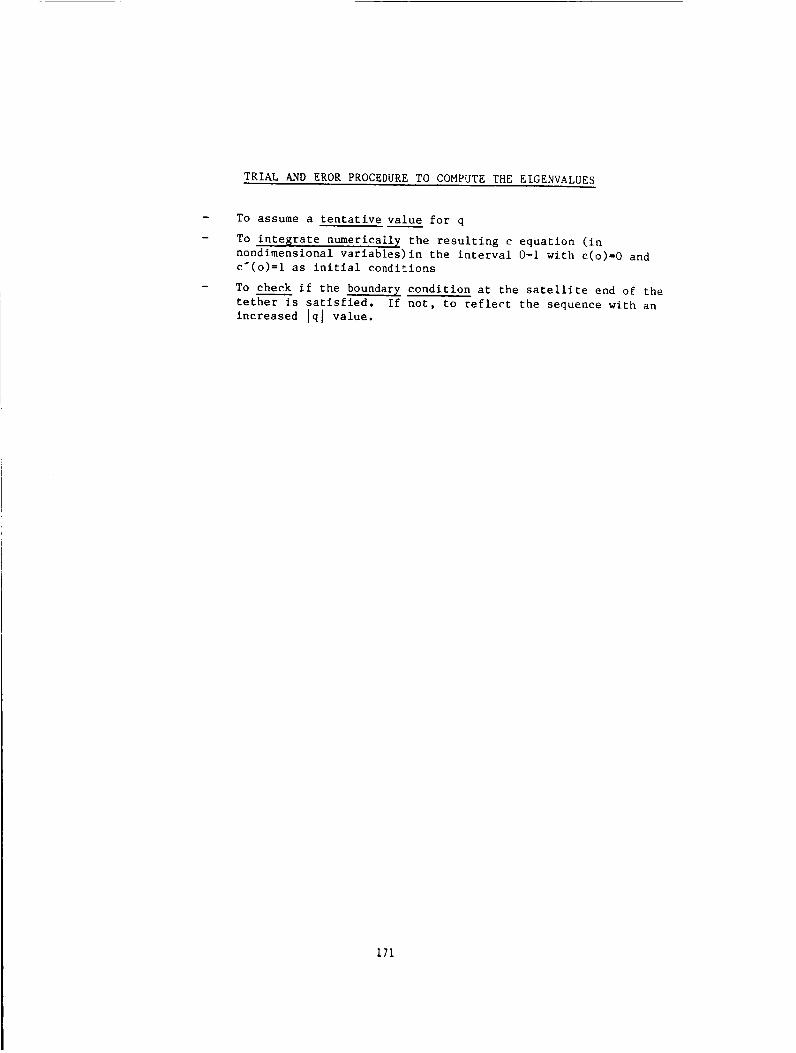
TRIAL AND EROR PROCEDURE TO COMPUTE THE EIGENVALUES
To assume a tentative value for q
To integrate numerically the resulting c equation (in
nondimensional variables)in the interval 0-I with c(o)=O and
c'(o)=l as initial conditions
To check if the boundary condition at the satellite end of the
tether is satisfied. If not, to reflect the sequence with an
increased lql value.
171
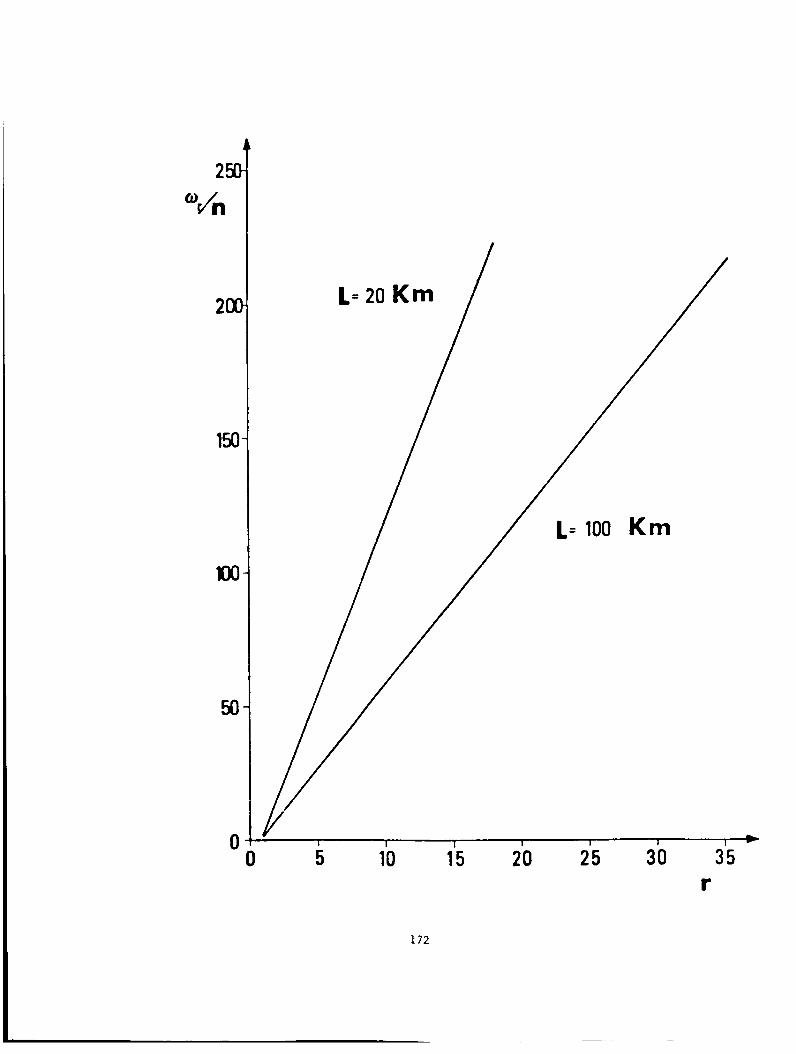
250
200
150-
100
50
0
L= 20Km
L- 100 Km
0 5 10 15 20 25 30 35
r
172

I
E
0
I!
o
E
0
|
Z0
0
WZ
O_
I.L0
0
0
WQ0
WWrYI
173

TETHER STRUCTURAL DAMPING
Purpose: To investigate transients in longitudinal vibrations
Assumptions:
coupling with orbital motion and lateral vibrations
neglected
experimental data from Martin Marietta used
Dynamical equation:
Boundary conditions:
Initial conditions:
"/t_',°1: _:_. _ (,,',o)- o
174
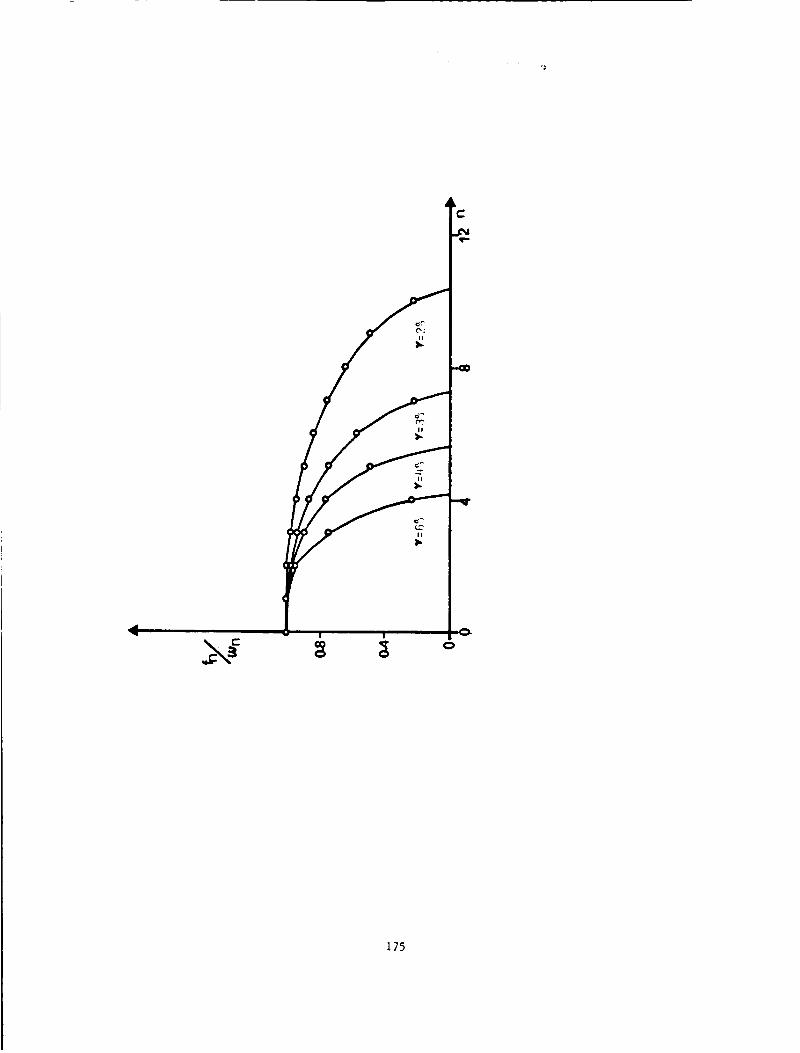
.,q
t/f
Y
,-co
_ _ o
175
c,
.,,%
- . . ,
_:.__...,,, _.,,. <., '.,'._,_":,:,-_..,:,".:
..,.:
",-_:::,), .,,a.
"Z""
- .. . .
"' .... b:;
[-i..:',!-,:,.>-.-'i[.:_.:'' ., "',", " : ..: ,,':;"-:,. ,. _,,. "., . --,i. _:';';,',,..:...... '. , , -. ,. ,.; • -, ,. , ...,.? , .. ,..• ".." -'';, . " '. ",,." -"..."." ".. 'C., ") - k...,.,: " -;." •
....... • .. ...... _,.,,,','._[. ,. .._._. ,.'. . ... :....-
-:':'-,, . '.:-._,. - " " :'.<"--/ ,"."..,'" " .'..'-"_'.t'.". "-'.",..,:.:, - .' ,'.,.,:,..,.,.. -... ".
,_,,,.,',_.-.,'. ,-,,,.,..:..._ • .... ,. , -,:. :
,. ,',: • ,.'" . " ,-... , -., ' •..-.:L"
•::,.: ,,,_:-,,,,-,,,, -,; _",, .v..:.... .. - .... ..[,....
., -:..:,..- -,-,_,? : -. 1 -, - • • .................. ","" ;'; " '.,- ,:-.i- . .... - . "...%
i'>i:/""::.,. ,. • . , .._,,:...,._,. .-... ,,.... ".,,.':..,-::::.,...'..,--_.--......,,
;.':;':, ".,.. -.'.4_ :,_.. " S.":,:: '"." : :: t" " :' _' '_ .,'-,:. '.'.-;• .,..:,,..-.,.':...,..,.?:,.. -., .'.'. ,.,:...,-,.. ,:,.:..,..-:..
:-:-.:':',.-,.:.._: ,;.., ..,;..,-,..,,...-,-:, :.. :-..
• ._ .. :.<. ,, ,".:_.:':',_• ,....-..._..'.,%._ ,;.;.,:),. )._ ",.,-.-,.,
176

SYSTEM DYNAMICS. RIGID TETHER
Purpose of the investi_atlon:
To analyze system stability during one elevator transfer fromthe Space Station to the SATP.
To evaluate orbital perturbations on the Space Station.
To devise velocity control laws, if needed.
Assumptions:
Tether elasticity neglected
Characteristic dimensions of Space Station, elevator and SATP
negligible with respect to tether length
In plane motion only (Coriolis force)
No external perturbations taken into account (Earth oblateness,atmospheric drag, etc.)
Method:
- Lagranglan formulation of the equations of motion
THE SYSTEM
Retrievable platforms tethered to the Space Station in order to:
conduct experiments in a dynamic noise force environment (not
attainable on the Space Station)
Elevator envisaged as:
platform for microgravity experiments at system center of
gravity
servicing module for the SATP
Tether intended to:
sustain SATP gravity gradient force
act as structural damper
transfer power and information (umbilical concept)
177
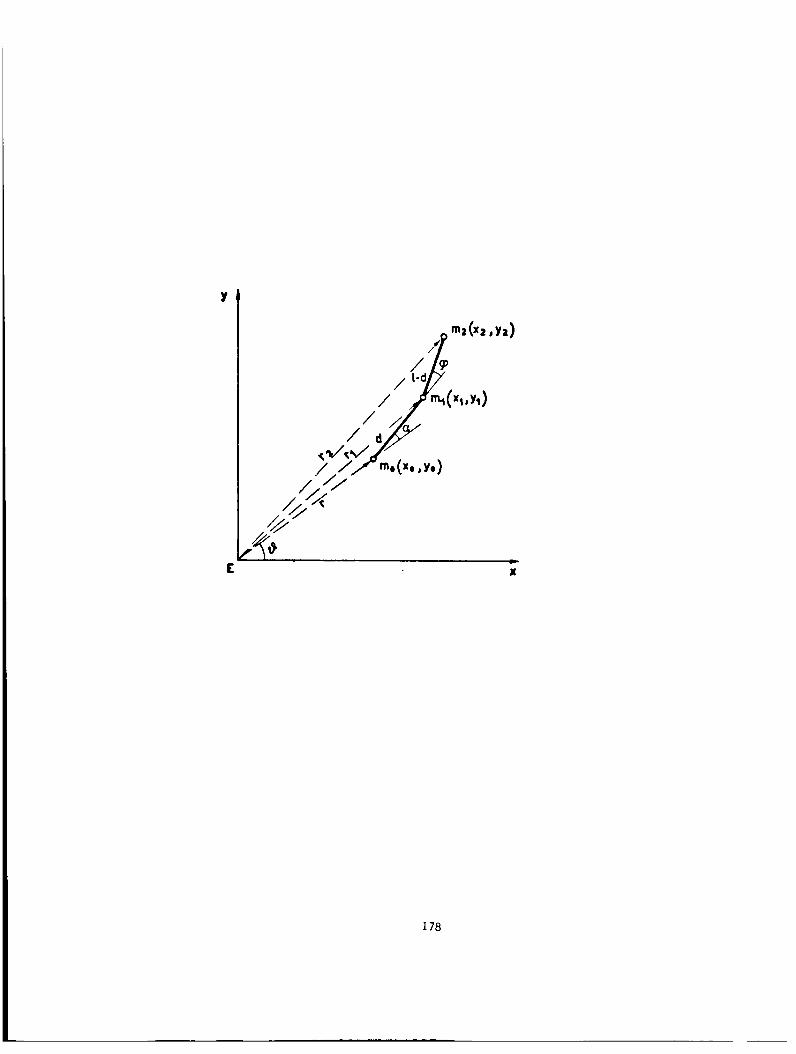
Y
m2(x2 _
/-/ _'_(',,y,)
/.//'_".C'.,y.)
z,'4_
_-go£
Y2)
X
178

s: o,t
I__- I_"_
.°
179

7o _,_._,,. v. _.O'"
_,. l;_t ;..,t,,p_,+e:
• 1. "k 1, . t _._.%-'_ _- V. "t 3 Lo')
_t" ,,_ ,.,"k_td t_++t:
180
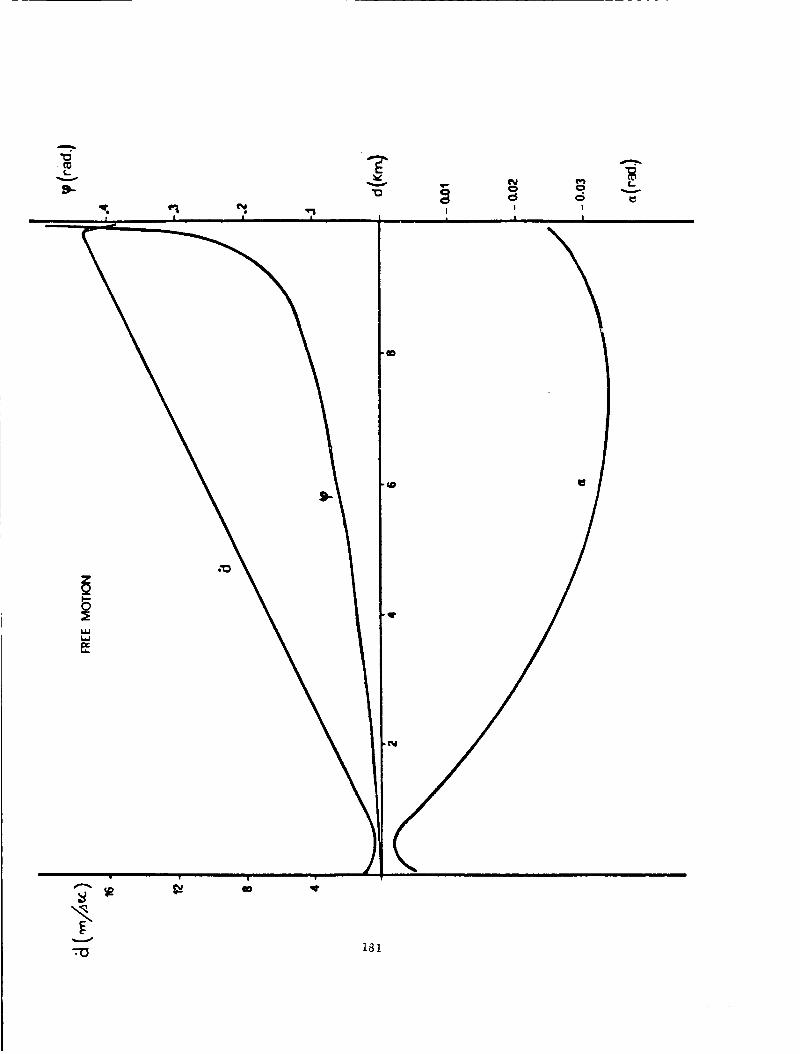
1_1
CONTROLLED TRANSFER
Control laws affected by:
m Coriolls force, with impact on average translation velocity
Transients at beginning and end of each maneuver, because of
singularities of the dynamical equations at both ends of the
tether
Linear Control:
In some cases numerical instabilities at the very beginning of
maneuvers
Exponential Control :
- At the beginning." _w _ _" _ _ _0 _)
At the end:
- Smoother motion
- Reduced time for a transfer
- Slightly increased perturbations on Space Station orbit
182
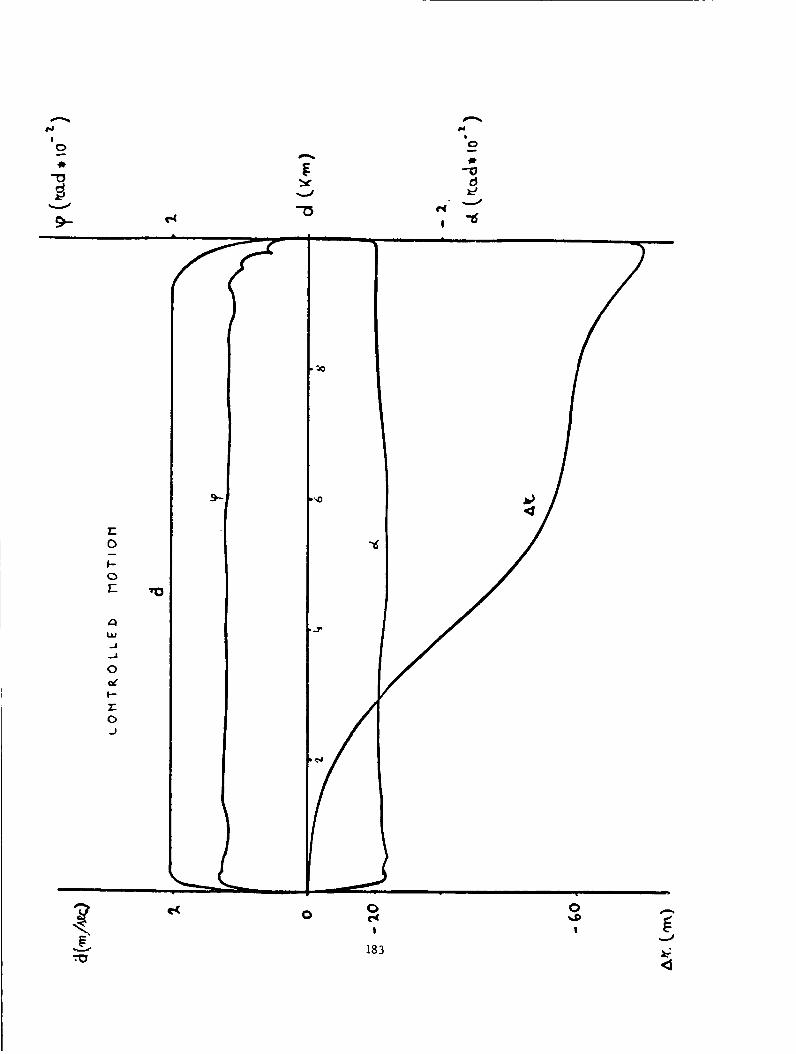
"_ 183

_2 PERTURBATIONS
Purpose: To evaluate tether motlon around the local vertical, forced byEarth oblateness
Assumptions:
- tether elasticity neglected
- first order theory used for the changes of the oscillatingelements
- three-dimensional motion simulated
184
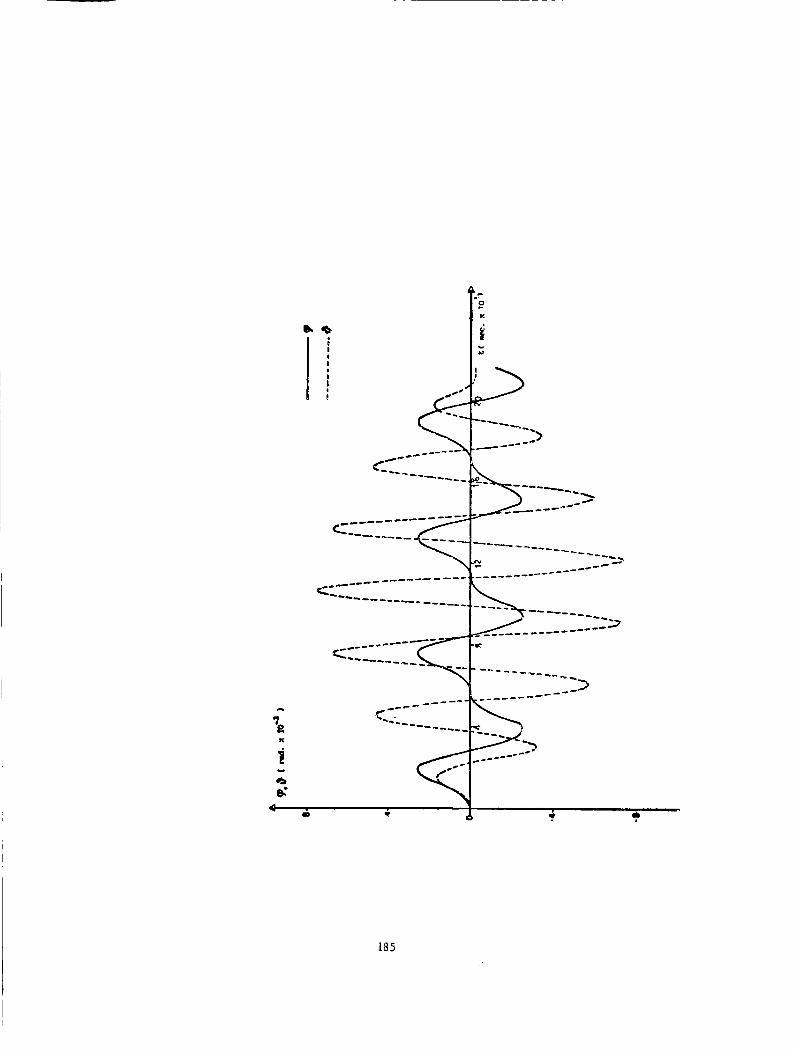
K
8_
|
o!
!
lib "l
185
N87-18823
TSS Subsatelltte Attitude Dynamics
and Control Laws Verification Programs
Floriano Venditti
Aeritalia Space Systems Group
m_.,_.___.._, ?, _,._ _,_ NOT _
187

TSS SUBSATELLITEATTIC/DEDYNAMICS
ANDCONTROLLAWS%'ERIFICATIONPROGRAMS
F. Venditti
Aeritalia - Gruppo Sistemi Spaziali
Torino, Italy
Abstract- This paper deals with the presen-
tation of a dynamic model of the Tethered
Satellite System and of the relevant
simulation program, developed in order to
provide the dynamic analysis support for the
design verification of the Subsatellite
attitude control. A special care has been
spent _n the Satellite attitude dynamic
analysis and the model has been specifically
conceived to this aim.
The way in which the simulation results can
be utilized for the verification and testing
of the attitude control is also presented.
i - INTRODUCTION
The design of the Attitude Measurement and Control
Subsystem (AMCS) of the TSS-Subsatelllte for the electrody-
189
_RE.CEDING PAGE 6LANK NOT FILMED
namlc mission has been completed and now it _s going to be
verified and tested. A representative dynamics of the system
is one of the main items that has to be implemented for the
design verification phase and in such an optic a dedicated
program has been developed.
The aims of this program are:
- to investigate the dynamics of the system, with a
particular interest for the Satellite attitude behaviour,
and to identify potentially critical areas for the AMCS
performance verification;
- to provide realistic _nput data for the verification
and testing phases.
To this purposes
0rbiter-tether-Sateliite
a model representing the overall
system has been considered and
developed, while the adoption of a simplified, provided
representative, ._CS model is enough for the goal.
On the other side, to the AMCS performance verification
aim, a complete and accurate model is needed for the AMCS
itself, requiring a small integration step (128 msec), tied
to the high on-board data handling sampling rate. The need
for the implementation of a simplified dynamic model (3
satellite rotational d.o.f + the possible elastic ones)
arises then, in order to avoid unaffordable CPU times.
The "dynamic-slmplifled" model can be called an 'open
190

loop' approach because it assumes that the overall system
dynamics impacts on the Satellite attitude, while the fact
that the attitude is controlled has a negligible effect on
the overall behaviour, this resulting in the tether tension
at the swivel point which does not depend on the Satellite
attitude. This seems to be a reasonable hypothesis, to be
anyhow validated by means of the "AMCS-simplifled" model,
which, in turn, can be called the 'closed loop' approach, as
it accounts for the coupling between the satellite attitude
and the overall dynamics, while being not burdened by low
integration step requirements.
The simulation results of the 'closed loop' model will
then be used as input data for the "dynamlc-simplified"
model runs; in fact, in order to provide an adequate capa-
bility to represent the system, the "dynamic-simplified"
model requires, for each run, the force time history at the
tether attachment point and the firing sequence of the
Satellite thrusters not driven by the AMCS (in plane and out
of plane thrusters) in input.
The results of the 'closed loop' simulations will also
be used for the integration and testing phase: the AMCS
hardware and software will work, by means of gyros and
sensors stimulators, in closed loop with a simulated real-
tlme-computed system dynamics. The same 'open loop' model
191 -_

as for the verification analyses will be used to provide the
necessary input to the stimulators.
At the moment, the 'closed loop' model has been
implemented and the program is undergoing integration tests,
while the first simulation runs will be performed _n a short
time.
Hereafter the 'closed loop' model and program are
described.
2 - MODEL DESCRIPTION
2.1 - Configuration
The electromagnetic mission will be supported by the
Shuttle in an approx 300 km orbit; the Satellite will be
deployed upward up to 20 km from the Orbiter; the Satellite
mass will be approx 500 kg.
0nly the Satellite yaw axis is controlled, stabiliza-
tion on the other two axes being assured by the gravity
gradient. During on-station phase, the Satellite spins about
the yaw axis and the spin rate is controlled (i rpm). During
retrieval, the yaw angle is controlled in such a way to
allow for the in plane and out of plane thrusters to fire in
the correct direction for llbration control. During the on
station phase, two deployable booms, part of the scientific
192

experiment, will be extended to approx Cm.
2.2 - Tether Model
Some preliminary analyses showed different kinds of
behaviour of the system depending on the tether length. This
leads to different representations of the system, depending
on the deployed length. In figure 1 the main system frequen-
cies are given as a function of tether length (_).
The frequencies of the Satellite oscillations about
its roll and pitch axes decrease as _ decreases; the gravity
gradient stabilizing effect for these axes also decreases,
support in tensioning the tether being provided at short
distances by in-line thrusters.
IH,]
.4O
Fig. 1
_ ax, Fr,q.
5a[ rd[ freq,
_. _tcb Freq.
_'Jax.fe-_.
1'_ax.freq.
5 'tO ;5 tr_sz fre_r's
193

The longitudinal frequencies of the overall system due
to tether elasticity decrease as 2 increases. It can be seen
that the axial frequencies may couple with the pitch/roll
oscillations. The number of modes to be taken into account
depends on the tether length: at short distance only the
first axial mode is significant, while the others could be
neglected, leading to a reduction of the integration step
without affecting the system behaviour representation; at
the longest tether extension also the second mode has to be
considered.
The string vibration too may have a significant
coupling with the Satellite oscillation at short tether
length.
These considerations lead to the need of considering
in any case the tether mass and elasticity: a lumped mass
approach for describing the tether was chosen, where the
number of masses is selectable as a function of tether
length.
The tether can be modelled as a massless spring
connecting the Orbiter and the Satellite; in such a way only
the first axial mode is simulated. To include the other
modes, the tether is described by mass points connected by
springs whose stiffness depends on the undeformed tether
length between adjacent bodies.
194
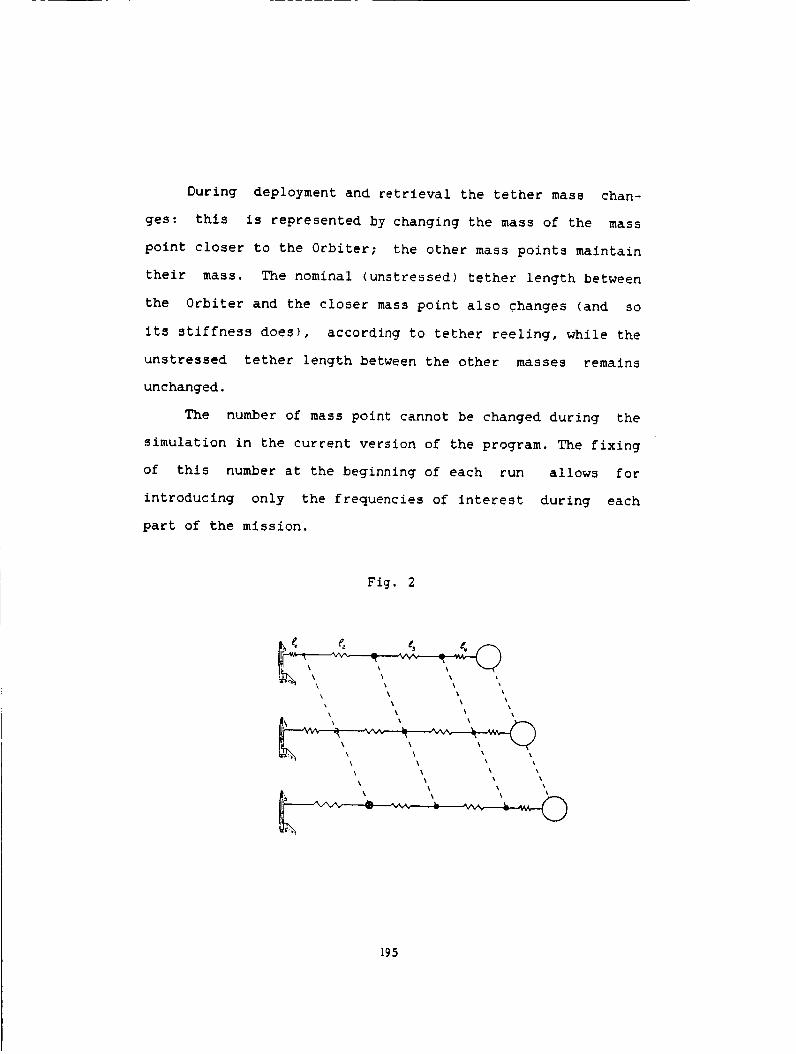
During deployment and retrieval the tether mass chan-
ges: this is represented by changing the mass of the mass
point closer to the Orbiter; the other mass points maintain
their mass. The nominal (unstressed) tether length between
the Orbiter and the closer mass point also changes (and so
its stiffness does), according to tether reeling, while the
unstressed tether length between the other masses remains
unchanged.
The number of mass point cannot be changed during the
simulation in the current version of the program. The fixing
of this number at the beginning of each run allows for
introducing only the frequencies of interest during each
part of the mission.
Fig. 2
\
\
\%
% % %
195

_hen, during deployment, the need for considering
another frequency appears, the simulation requires a restart
with a new description of the tether which takes into
account new mass points. The I.C, for such a new
configuration can be derived from the results of the
previous simulation, under the assumption that the new modes
are not excited; thus, the new masses must be added until
the associated mode effects are negligible. Reverse
considerations can be applied for the retrieval phase.
An alternative/complementary model is being developed,
to be used for cross validation purposes: the mass points
are maintained uniformely spaced along the tether length to
represent the actual mass distribution, during both
deployment and retrieval. The system frequencies are now
closer to the actual ones, but the mass points "move" along
the tether.
2.3 System Model
The Orbiter and the Satellite are considered rigid
bodies connected by a tether represented by series of
springs and point masses. The system is considered orbiting
around the Earth.
The references frames, showed in figure 3, are:
- Inertial reference frame (IRF), located in the centre
of the Earth.
196
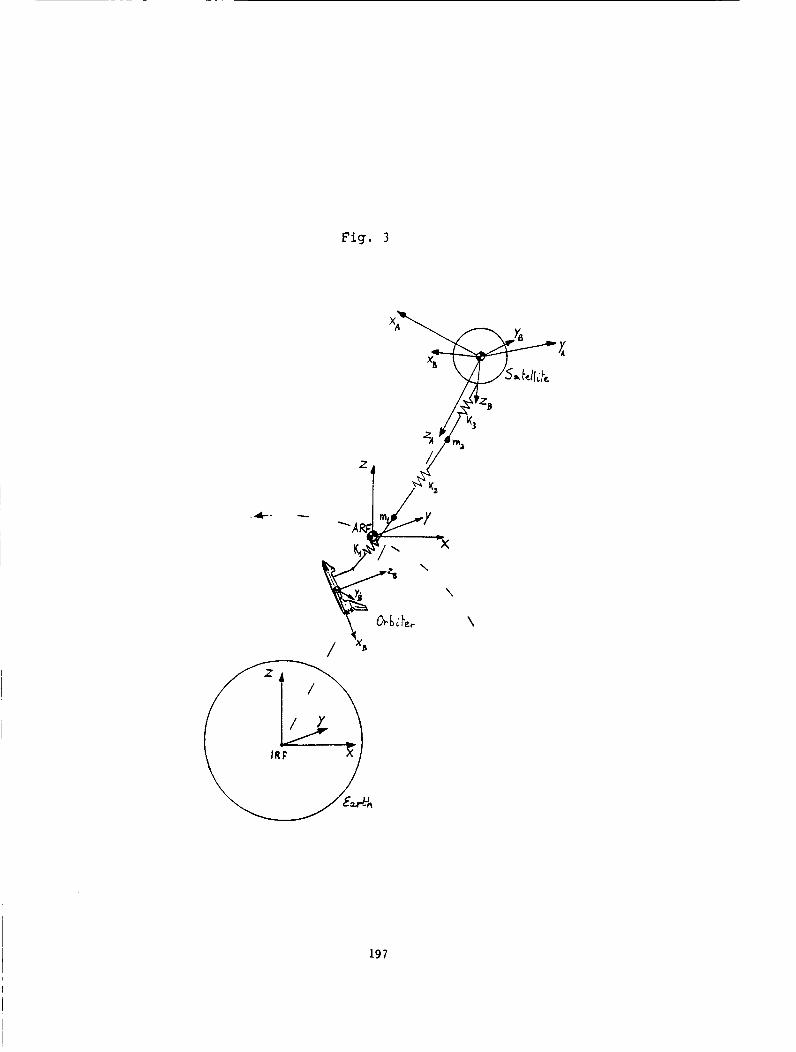
Fig. 3
.4--
z Z
---A_7
O_gibe_ \
k
197
- Accelerating reference frame _ARF), in the centre of
mass of the overall system; it is always parallel to the
IRF. The motion of ARF origin is described with respect to
IRF, integrating the orbit equations of the system. The
motion of the parts of the system is described with respect
to ARF. This is to avoid possible numeric_l problems when
the motion of a System is referred to a very far reference
frame (small numbers added to large numbers).
- Orbiter body reference frame, located in the Orbiter
c.m.
- Satellite body reference frame, in the Satellite
c.m.; z-axis is directed toward the tether attachment point.
- Satellite attitude reference frame, in the Satellite
c.m., with the z-axis always directed toward the Earth
centre. The Satellite attitude is referred to this (r_me
<local vertical).
2.4 Dynamic Equations
The motion of each body is computed with respect to
ARF. The Orbiter has 3 translational rigid d.o.f's; the 3
rotational d.o.f.'s can be taken into account or neglected,
according to the figure of an input flag. The Satellite has
all the 6 rigid d.o.f.'s. The mass points describing the
tether have only 3 translational d.o.f's.
198
Three differential equations describe the orbital mo-
tion of the origin of ARF about the Earth.
The translational differential equations with respect
to ARF are obtained for each body considering all the forces
acting on it (actual and apparent ones):
where:
?
No Coriolis force is present because the ARF does
rotate.
.3cbiter or the Satellite are represented by the Euler
tions. The rotational motion is described by means
Euler angles, deriving from the integration of the
equations (motion about the centre of mass).
: body c.m. position in ARF
: acceleration of ARF origin in IRF
: local gravity acceleration
: force(s) coming from the tether
: other external forces (thrusters firing, imposed
perturbations).
not
The rotational differential equations for the
equa-
of 3
Euler
2.5 Other Features
No environmental model has been implemented: aerodynamic
drag and electromagnetic forces on the tether were consi-
dered negligible, even if the possibility to input forces on
199
the mass points is foreseen.
In general arbitrary forces can be introduced to
analyse the system behaviour under specified perturbations.
All the Satellite thrusters are modelled and their
misalignements, as source of attitude perturbations, consi-
dered.
The control laws of the tether length and in-plane &
out-of-plane libration developed for the TSS program have
been implemented.
The Orbiter attitude may have an indirect but important
impact on the Satellite behaviour during some mission
phases, so it has been included in the model together with a
very simplified model of the digital autopilot and reaction
control system.
Due to lack of data cn tether characteristics, no
damping has been considered for the system oscillation, this
resulting in a conservative hypothesis. The tether torsional
stiffness is negligible and so it is not taken into account
in this program.
A new feature which will be introduced in the program
is represented by the addition of flexible modes on the
Satellite , simulating two deployable booms.
The need to model in an easy way the flexibilltles
the deployer boom on the Orbiter,
of
expecially at very short
200
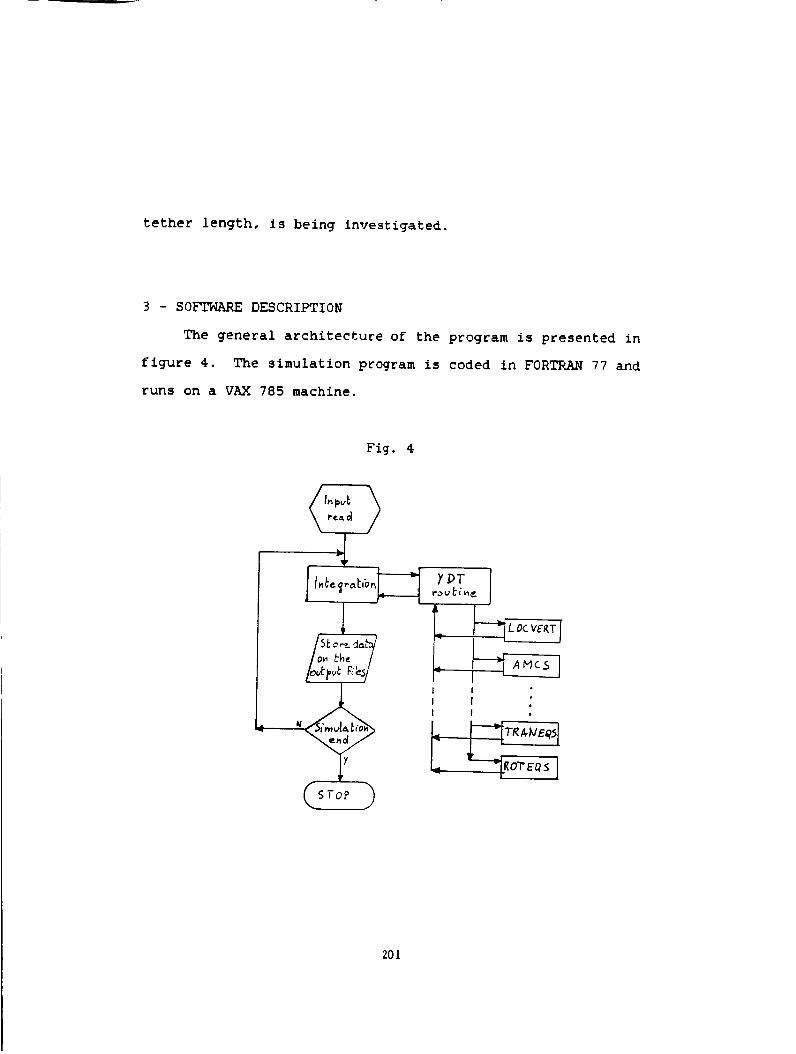
tether length, is being investigated.
3 - SOFTWARE DESCRIPTION
The general architecture of the program is presented in
figure 4. The simulation program is coded in FORTRAN 77 and
runs on a VAX 785 machine.
Fig. 4
I
I I
I II I •
201

The YDT routine computes, time by time, the state
vector derivative to be integrated. It determines all the
force and torque vectors acting on each part of the system,
via the management of the call of several st_routines, each
describing a particular _tem (see table l),allowing to build
the differential equations.
Subroutine Function
LOCVERT
AMCS
ACS
INLINE
PTCHCMD
5IBRCTL
0RBATT
TENSCMD
REELEQ
VARMAS
THRUST
0RBEQS
TENSION
GRAVITY
TRANEQS
ROTEQS
Sat. attitude wrt local vertical computation
AMCS model
Simplified AMCS model
In-line thrusters command logic
Commanded libration pitch angle
5ibration control logic
Orbiter attitude control system model
Commanded tether tension
Tether reeling equation
Tether variable characteristics computation
Thrusters forces and torques computation
Orbital equations
Tether tension force acting on each body
Gravity forces computation
Translational equations for each body
Rotational equations (Satelllte,0rbiter)
TABLE 1
202

the
as well as new routines introduced and other bypassed.
The integrator is a 4th order Runge-Kutta algorithm.
The output of the program are:
- diagrams of selected variables;
- print-outs;
- restart file, which allows for the restart of
simulation from the end of a previous one;
The program has been conceived in a modular way so that
change of the generic module can be friendly performed,
the
containing the time
as input for the
- output file , stored on tape,
history of all the variables needed
verification and testing programs.
The dynamic part of the program is being
comparison runs
program.
checked via
to be performed with a qualified simulation
4 - REFERENCES
1 - C.S. Bodley, A.C. Park - TSS Orbital Dynamics Model IB,
Martin Marietta Corporation, June 1984,
Contract no. NAS8-36000
2 - C.S. Bodley, A.C. Park, P.J. Grosserode - TSS Orbital
Dynamics Model IB (Revision A), Martin Marietta Corp.,
203
February 1985, Contract no. NAS8-36000
3 - DC_2 User Manual - Vol i Theory, Aeritalia
£SA Contract he. 4045/79/NL/A/<, (SC>
204
VIEWGRAPHS
205
I---
C,O
I---
C,O
I..._1
Z
Z
0
DI
0
I---"
Z
0
C_
0
O0
0I
0
I--
206

I--
r_
_1_JC
t
!
!
t
O0
O_0"I"03
03=
o3
207
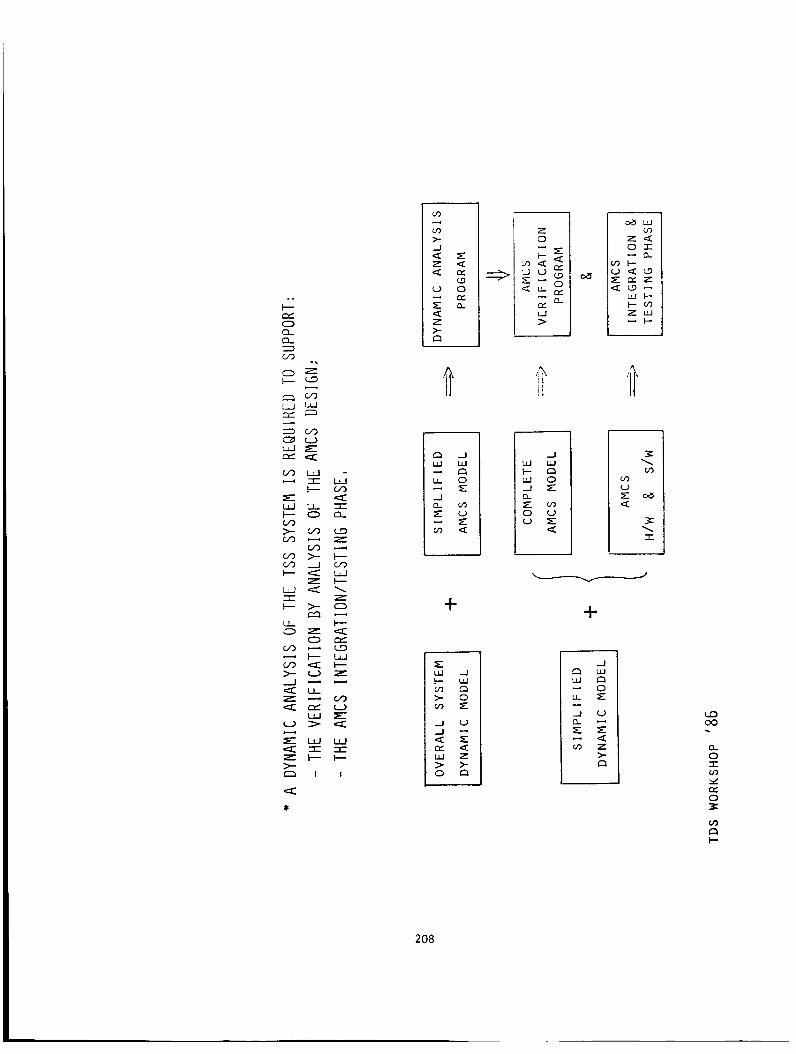
C_Q_
C_ Zk.--
_ I t,I
--t-l-- O0
tt -t-O r'_
O0>- COO0 ,--, Z
CO >- I---(./3 __J
Z I---
-t- Z
U_ h---Z
>'-- _ Z
U_
Z _ I---->--
0_
cO>-J
rY
0
Z>-r-_
A
u_ 0_ _--..._1n o")_- (...)
+
L_ -JF- UJ
>- 0r._ _-
J (Jg
_ Z
0 _
Z0
,y
O'r !n j
CO I'--
UJ F-F- COZ ILl
" II
JI,I uJ_._ _.__J 0..J{3..
0
3=
_" c_
4-
_'_ ILlUJ _ I-- 0
..J
>- I
I
C_
Q.
0
0
N:
208
0
C_
J
Z
Z
[,I 0
CD ,,i
L.J
-- >- Zh-- J
c=Z Z
I._ It--r- F-- _--
___ >-
Z Z
>- _
t---
O0
0"T-
v
0
r_I--
209
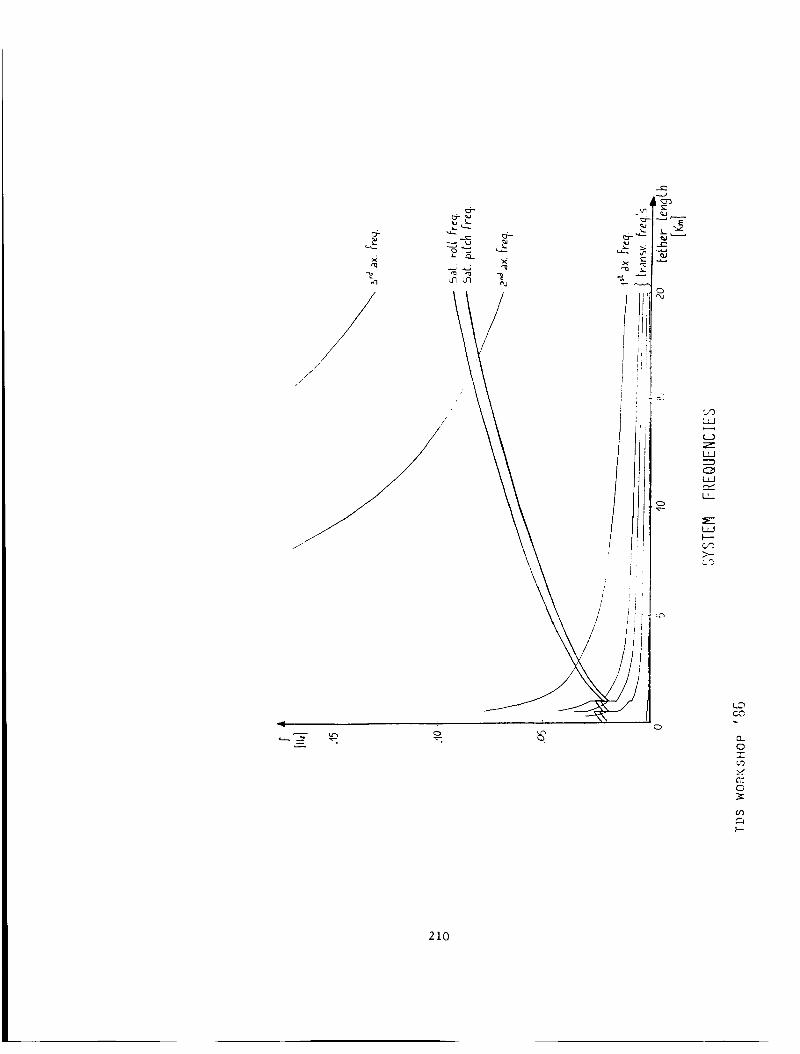
/
\
ZU_
C_UuJc_
'U-
LUF--
>-
L_
CO
o_
(Dn-
C,_.0
o9
210

_Ju_c_fED
uJ-r-
uooO
0.O-T-(nvo-O3:
u9c_F-
211

(
Z
o.J
1,1
/
(Z
>*0..Ja..
O_0
0
cO
I--
212

(
I .......... i:' _i'"/
................... I'" /i : /
, a_ i
T oE
f
,o _k.
a U H _. _ b h
zw
w
LL.
__J
--_ W
LOO0
0-l-
n,,,
o
I--
213

s _
___J
L.___
o---
>
I---"
-'r-H-"
H--
O0
0..0I
v'r_0
o_
I--
214
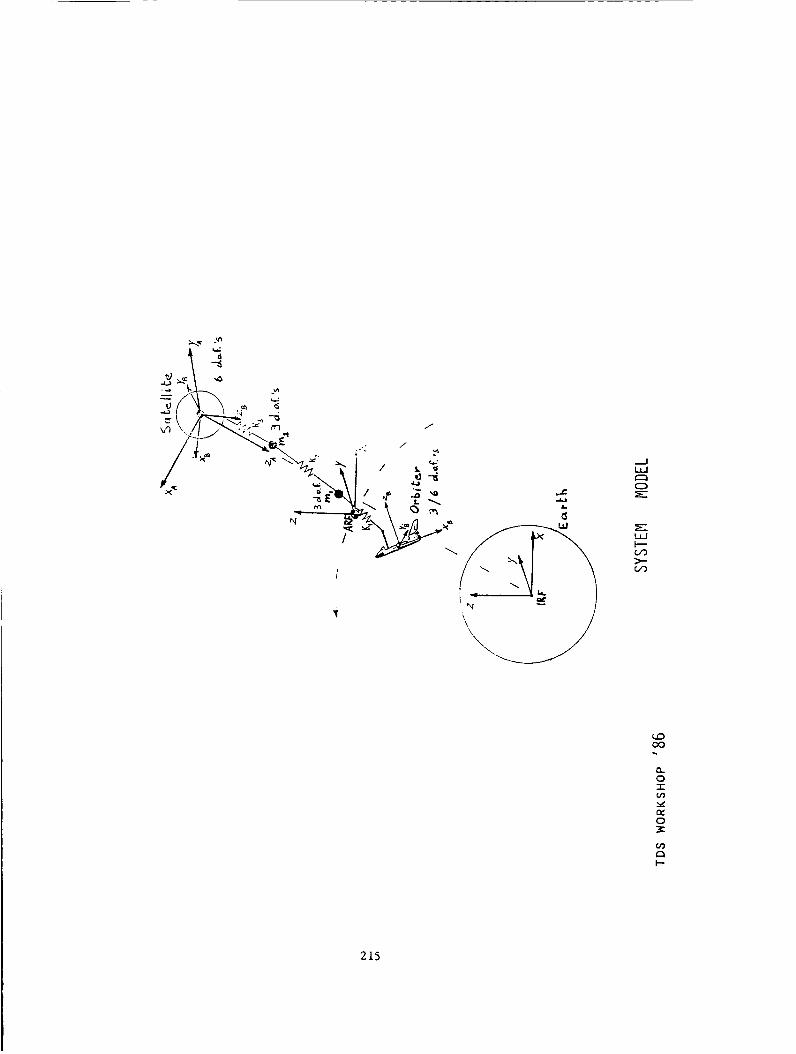
.....J
0E
E
I---
>-
0I
e_0
215
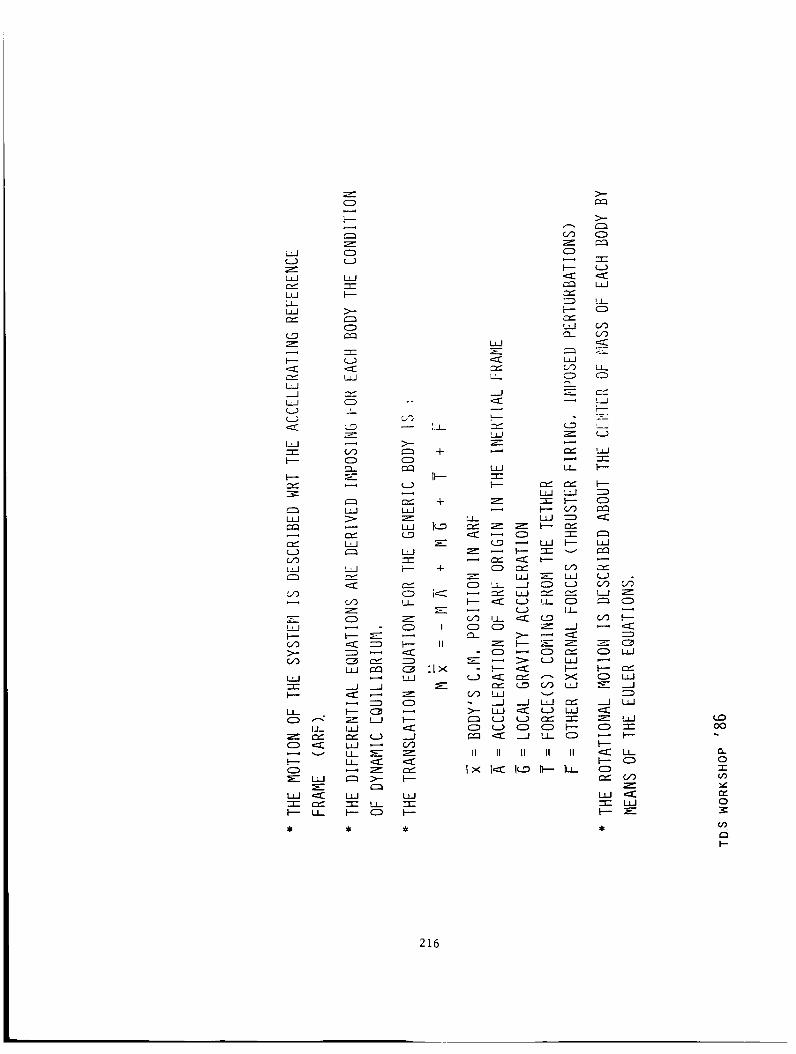
LOO0
0"I-co
,_.
0
&O
216
O0
r_0-i-
0
o_
I--
217
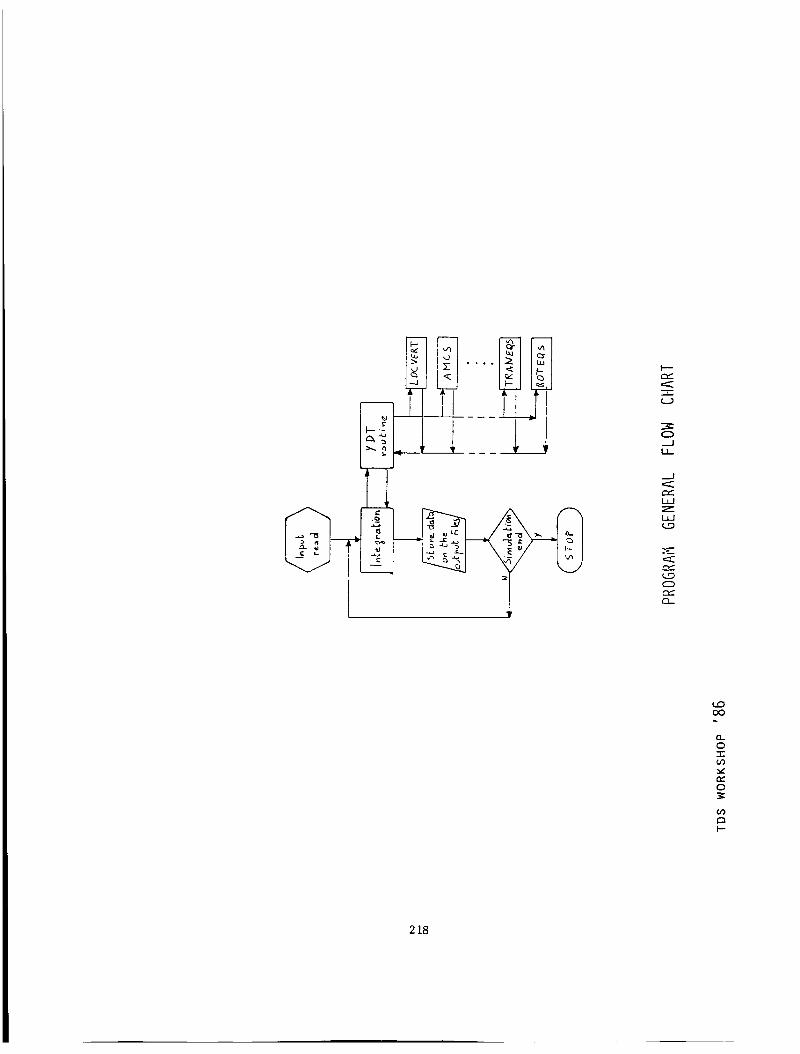
,r
-r-
L.D
0__J
t/-
._J
LUZt_J
C_
C__
COO0
o_
0-vu_
12:0
3=
u_
F-
218

Validation of TSSEngineering Simulation
Zachary J. GalaboffNASAMarshall SpaceFlight Center
219

z0
-=I
kL(,.0 la..Z O
a: ,,:I:
Z (=0
(.0 *
>-
O
Z0
I--
...3
)
o
_::_i_IG pAGE _LANK NOT I:;ILMED
221
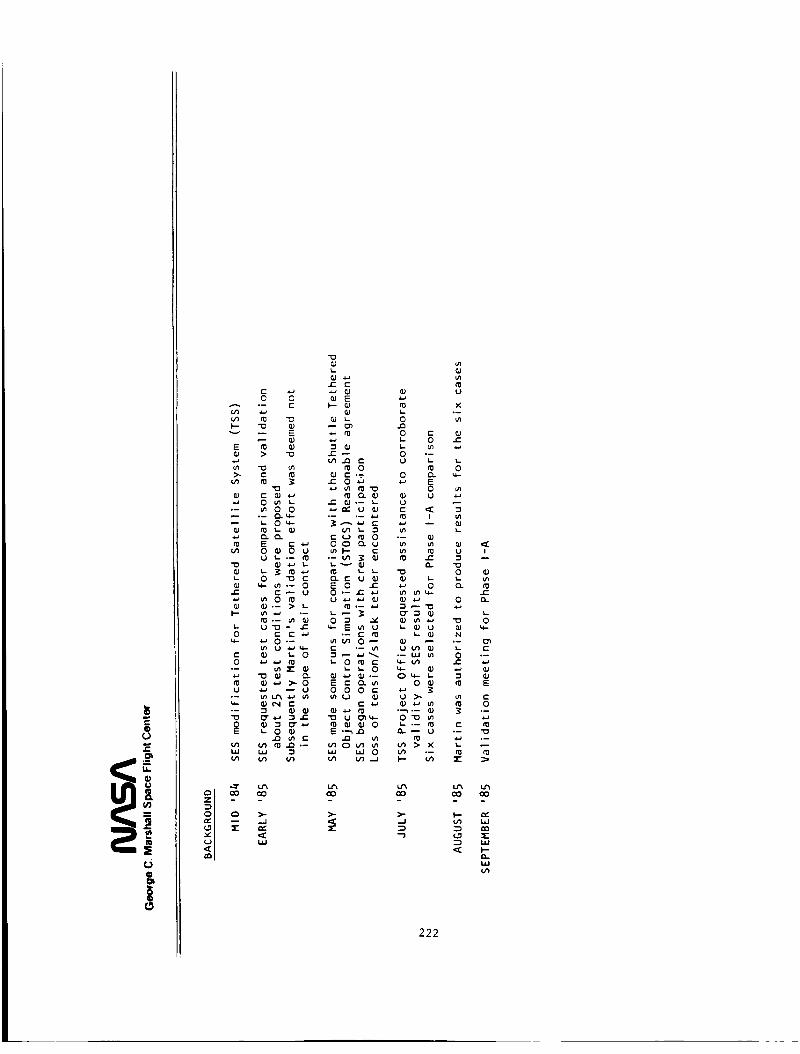
0
|o
c"o°--
.,_
• - u_ 0 0
_- 0
0 0 0 U
u,- _ '-- 0
._ _n 0 _CD _.-- > i-
_" '_ 0 "--_ U 4.a u,,-
r- _ _ 0
0 _ ,k,_ _o
• - _ _
_- 0 •
U_
"0
EI--
c" I_ .-- I-
0 ,-- c" ,_,
0 m .-_u.- _ u_ U
k. 0
0 0 0 '-
t- ,_,
L= .---_ .Ca
_,' W 0
CO
3.-
_r-
u_
U
X
°--
0 m
m
"_ 0 0
m m _ ¢"
0
"-- _ _ 0 "--
• '=_ .-- 0 _ .--
O- -- U .-- "0
_._ .-- ¢_
k_
O0
>-.,J
--)
222
O0 O0
(/) w
)=IJ
O-L_
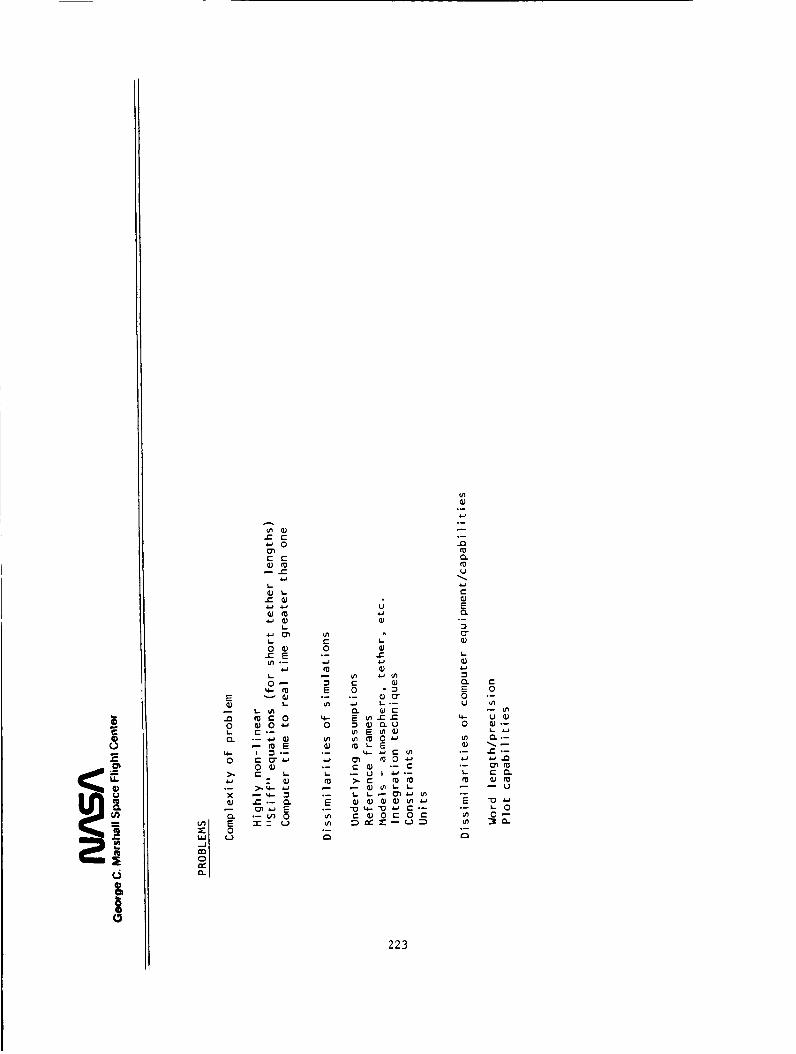
!
i¢B
r
E
oo.
0
>.
Q.
.zz c-O
r-
J-J O_
f" E°-4.1
vs..
_o• 0 _t.-._
0
¢- ._ e-_
•-- V'_ 0-r-_ _
0°--
Eo--
0
°--
!-
"E
°-
Iz0
°_
E _
e- I1_
¢,.
L .-
e- e'-
0._
• 0 _
I 4,_ .-
0 t- 0 _-•s.- -- _.._ ._
223
o--
r_
O.t_
EO.
°--
O.EOL)
O
°--Lr_
°--
t-Oo-
e- ._
-- U
"0 _.a_- 0

q}
o
I-
wI.-
wI,-
>-
F-
-.I,.I
l'-
-,rI'-
I--
I
w._1
I'-
t--
I--
I.UI--
wI.-
u.II--
I--u')
I--
Q
U
"T_"_r. x_
0""Q.>-o a-
l.-
>.
0
o----
0°_
.wJ0_,-
o
u
"Z "_(_
t" "{3
0 ""¢_.>.-Oa.I--
>,.
"5"C0 ¢)
w,-0 V
t-O
,w,J_
O_¢L.
0
,j-
o 0
o,_ G
o
0 Lt_ 0
t'N _
CM _
W
oo'_ 0 0
_ G 6
0 _
_ 0
oo
0ocOO_co 0 0
224
0 o
0
o,t o
co
o_
0
0 o
o o
0
o'_c,_ 0
oo
00oo
oo o 0
oo o_
%Ou.I
oo o%
0 u_ ,.,0
V_ dg
0 _ co
r,4 0('M ¢M
w
00
f..,.,-_- o_o_ o,,.10 r--
o _ cr_
c_ _o_
c,.I (',4
co
0 "_ I._
g,?,_(_ _ m
o _ co
(__ of,4 _1
_o
co
00co
oO o 0
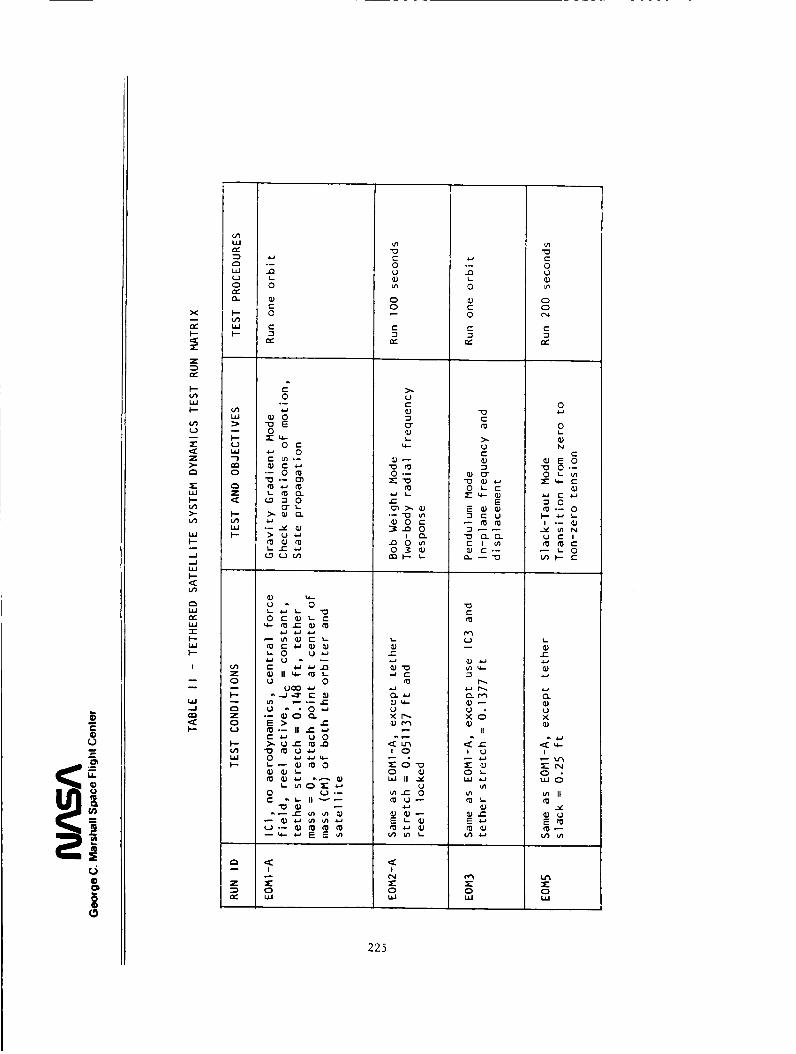
)
i0
)
X
k-c_
Z
IY"
p--
k-
Z
w
k-
wk-
_J
I--
wn-I--w
I--
I
W..I
k-
0r_O.
k-
k-
I--
0
Z
I--
k-
Z0
k-
O
k-
I--
0
t-O
r-
t-O
°-
Eo
oo
c.._ _ 0
L_ ._ _. 0-_
0 C: _ _--
• II _-- _ _-U 0
_ ..I ,._r C
• *--II ,.,_ _
0
0
0
C
t-O
_r
t_
t-
O 0 _-_._ 0
i-
X_
I 0
0 _
°-
l_
0
0
r-
e-
0e-
0 _
_ 0 0
"0
t-t_
vl _,-
0II
0 L.
c-
O0
00
c
0_=_
0
Q;N
0 _-
O
i--- _.o I-
•._ m N
c-
00X
0
I
_- eq
0 0 .--
--_-_ _ _n
1
0
QJ
0
t_
!N
0
e- 0
t_
0
e- • 0
0 t_
0
225
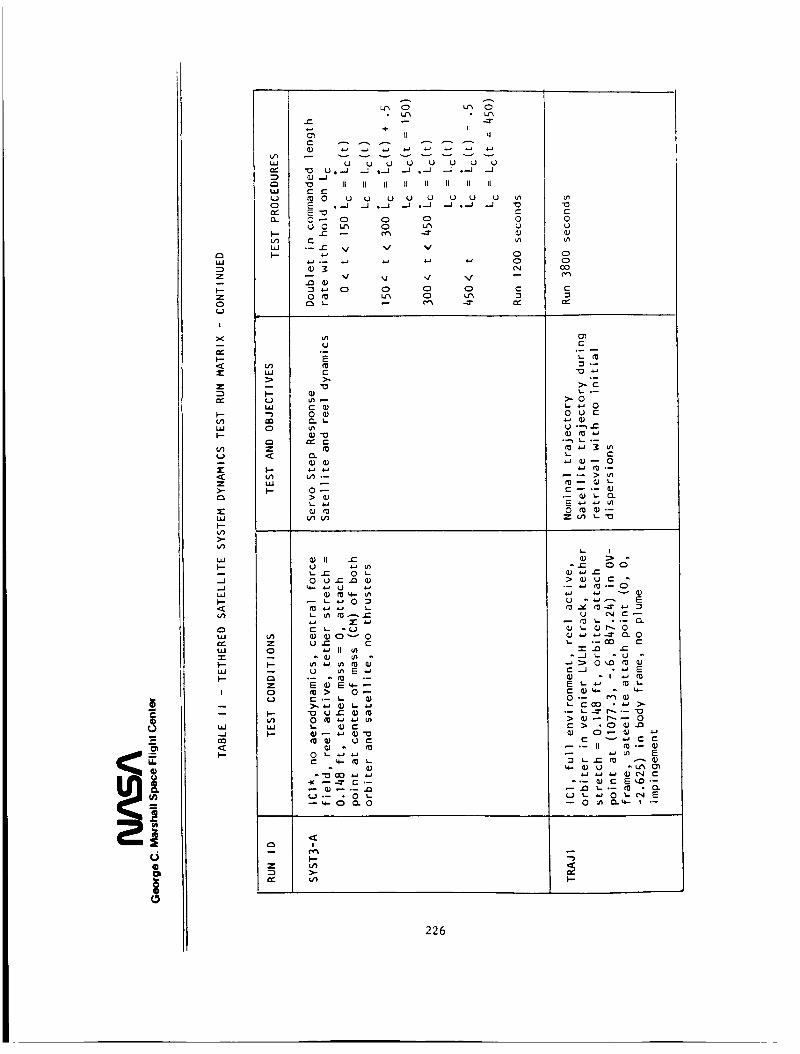
00
o
ILl
Z
2:0
I
X
<C
Z
_nUJ
tJ
<_Z>-
_J
>-
ILl
.J
.JILl
<[
W
_J"r
L_J
I
W--J_3<
W
o
CL.
I--V_,.II--
t_>
b"
LU
0
t--
I--
Z0
Z0
I--
I--
z
r-
(-
ridc
EE0,,3
t-,-
-,10
+
":" "D ":,j
u,--IIJ
II
0,.,-J
-- 00 u'_
,,C V
,o 0
e-
C I1)0 _
0> _
_ II e-U
0 ',Jr" ''_
u ,r"" t-
°_ . _ o-
_0 > O--
U U-J __1
II II
U U
00
,#
0
II
U U_.1 ._1
11 II
,,_ , ,,,-I
0
00
,.,-, "S"
i11
u u u
II li II
o (,.).J .._1 ..2
V
cD_
0u_3_n
OOc_
c-
cOo_3u_
ooco
c
r"
°->- cL..-
>'O_- _ O0 o c
1,3""_ .C
"_"_ ".__
_ °-- > _
0 tO _ ,--
¢0 _ U ¢"
-K _.._ r- .--
¢,._'-- ° 0 _-
>-<_
226
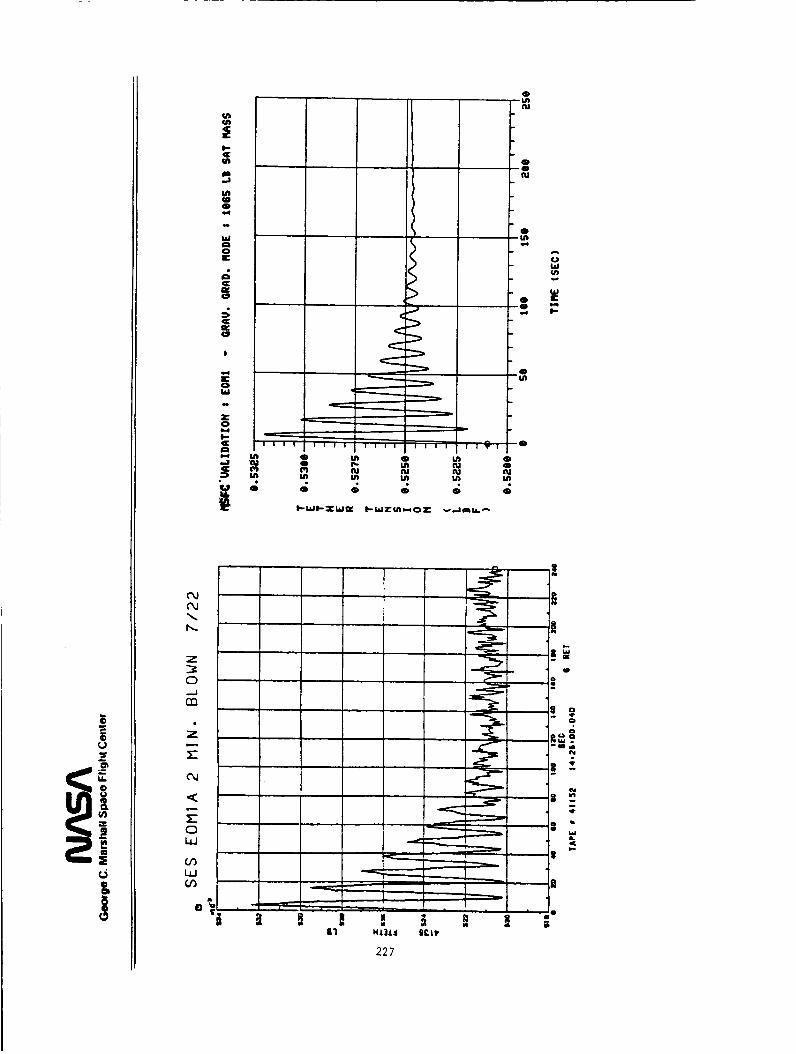
|
_W_Z_E _WZ_OZ _i_ _
z
0._Jcr_
OL.cJ
(./')L._
I l
__._..-- _
|I HA34J 8_Is'
s o0
moO_
e=,
227
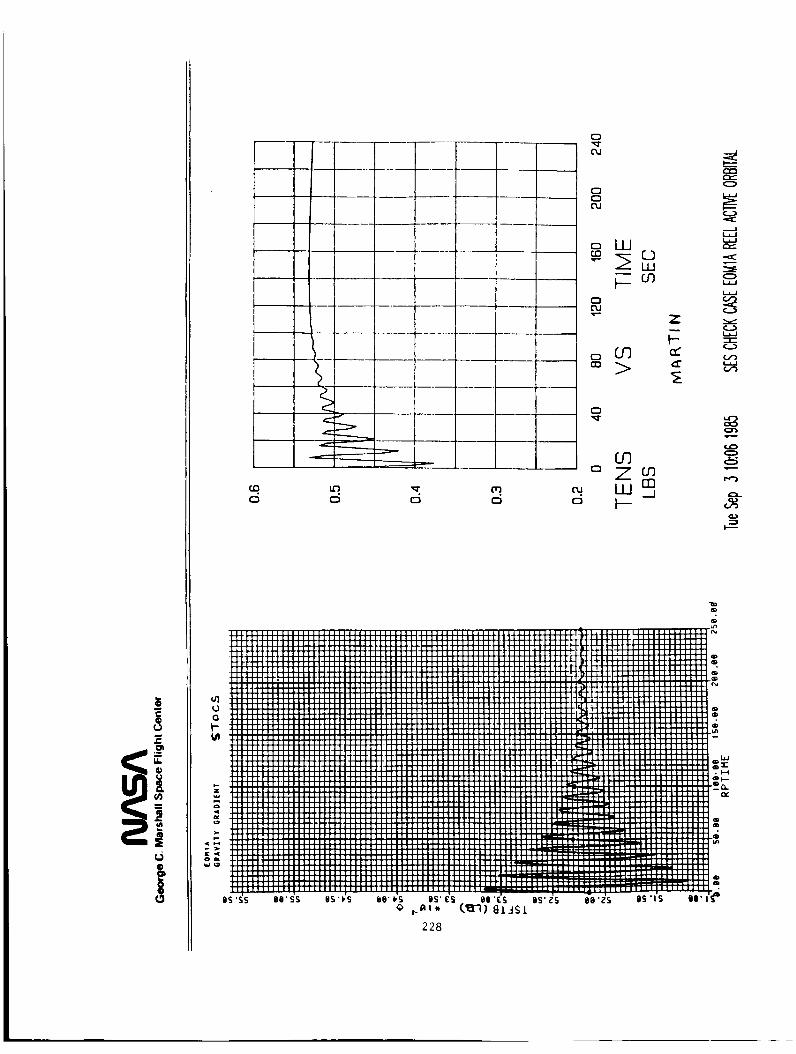
228
C_
C:]C)t_J
C_
o U_
C_
U_o Z
LUF--
LLJU3
O3[33._J
t-c_C_
III1" I
..._J£_,_1I-,_1
0
I_,.=/
i,n
.,.,,.,,n
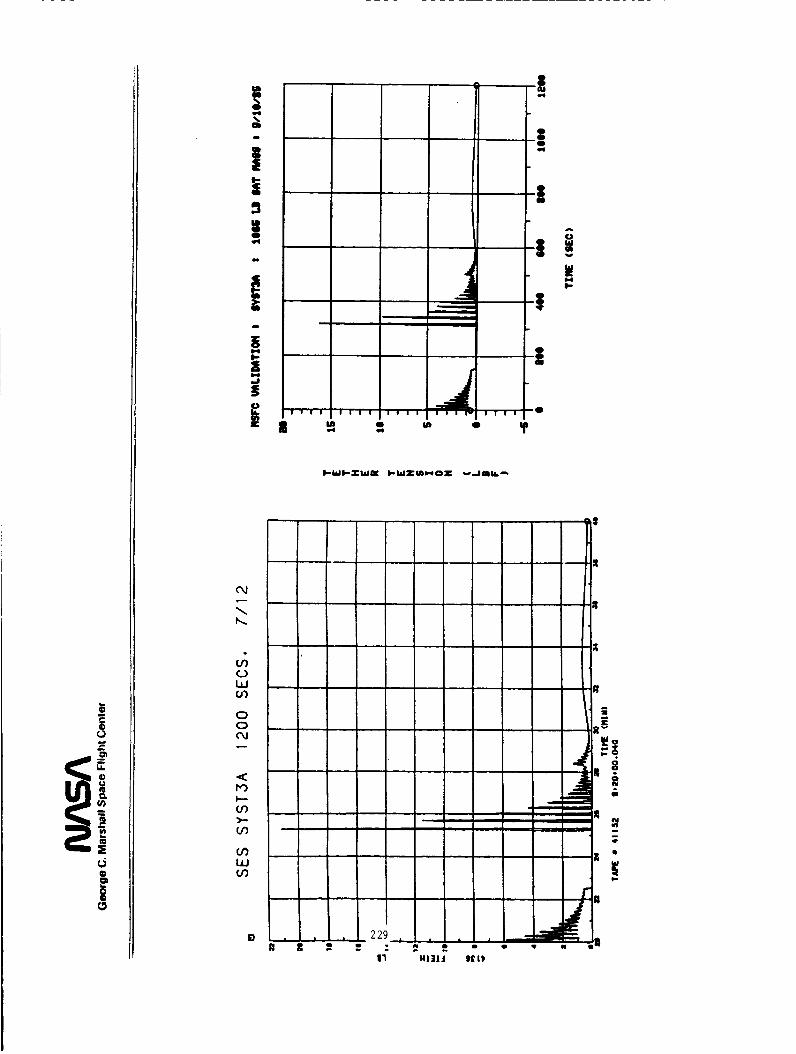
8
]E
m
.! J II_ -4)
| u_ . ,,, .
i,C/)c..)W¢J)
I-- a
e 2298 .* .s . ,i • . o •
11 HI_IIJ I£111

!
]|
00
00
0
o
J
o o o o o o q
oo
230
e0 "01 D 0e.
O3,-.., Z c_
LLI _I'---
I-
_E
n,i
"w"-
. o
I'',-
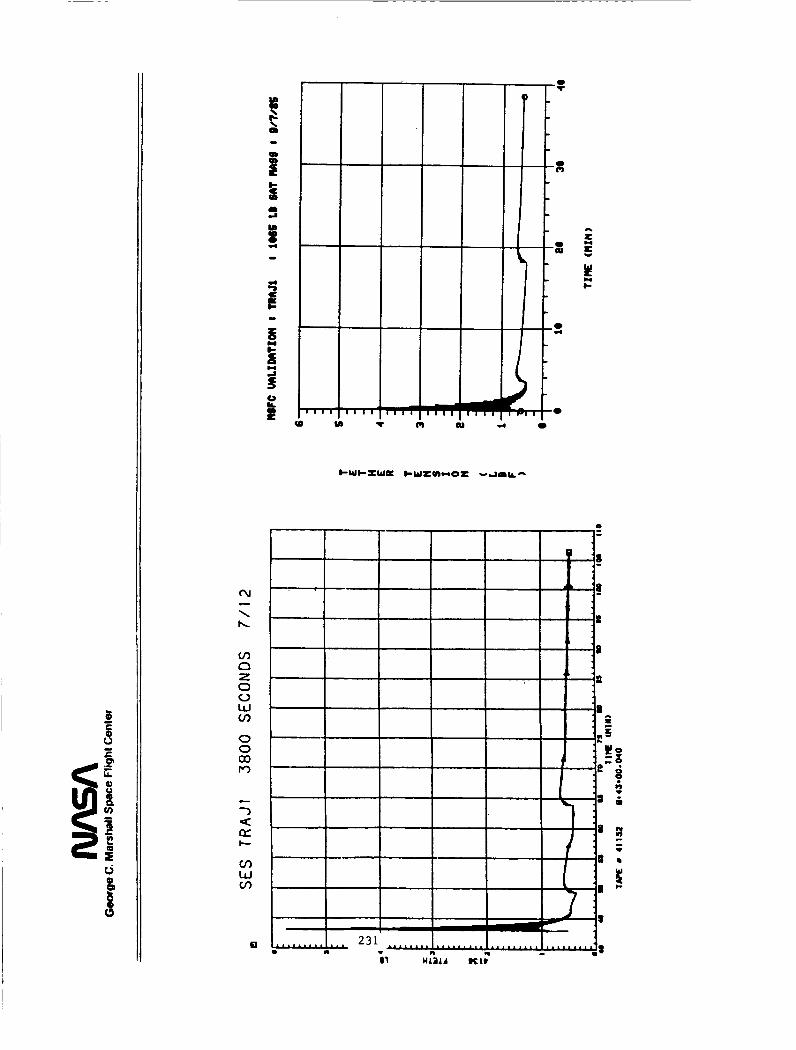
i
GI
.i .
! ""
__ -.
I_"W I,- Z WI _ _t,,q v,=J I _,,-_
Q
i
i i,
2 ,
g ,
_ej
]L
_ ............ 231" " i_ _'_J ,eL; "'......."_
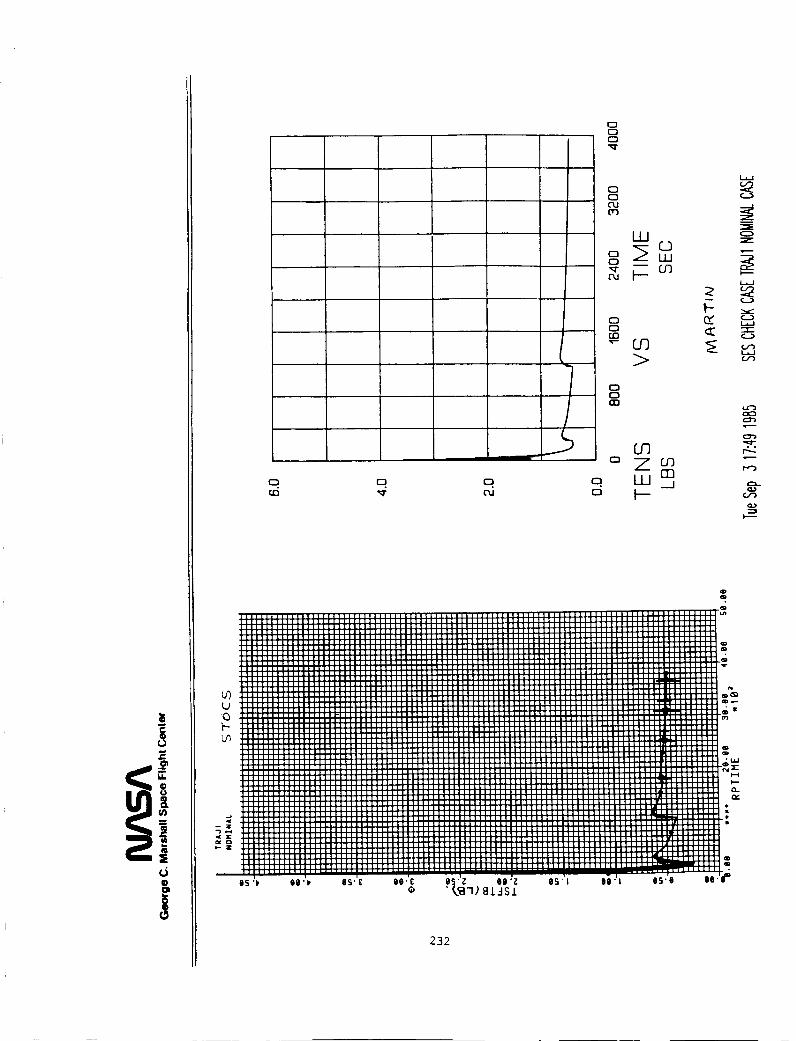
i
i|
E3E3O
E3
(:3CD
(3
o q Q. _.U:) _r (%1 O
L._
(:3
"5III oz
i.I
I.I
(:3 E: _-cJ
L_J
III|11III
I [I1!
i lllllilllllillllllllli[ IIIllllll|l|llllllllllll I IIIllllllllllllllllllll[l[IIllllllllllllllilllllllil[lilli[I]llllllllll[lllllll[llllllllll
I I 1 [[llilllllllllilllllllllL I I I |llllllllllll]lllllll
IIl[llllllllllllrlllllllllllllllllll[llllll[llllll IIIII
Z_m
LU _jB-
II[llillllllllIIIIIIIIIIIIIll[ll
iIIIIIlilllll]l[lllllli]llll[l[[lllllli[[llll|llllllillllIIIil11]11[11111[11lllllillllllllll[l]
Ill I l I IIIIII11[1|[1111]11111111 IIIllllllll iiiiiiiiiili111[11 |
llllillllllllllllllllllllllllllllll[ll]llllillllllllllllllllllllllllll [ll]lllll[lllllliilI I I I II Ill]l|l.---IIIIIIlil
I IIIlllilll IIIIIIIII
--, i IIIIJllll I I t lllltlllllllltlllllllllZl'llllll wl I t I [ I tl|llilllllill[ll[llllll ] Illllililll IllmPml'rllll|l|ll _+
I I U llUlllnllllUllnlllllllllllllllltll :
i 1 Illllllllil]llllllllllllllllillll IIl[l]lllll :I l I I IIIIIIIIIIIIIIli]llllllllllll
IIIIIIIliilllllll l l ]llllillllllrlPllllllllilLd_ t l I I I I [llllllll Ij_LIII[II[II
II I1111111 II i l lltlllllllllllllllmlllllllllll] IIIIllilllllllllll]llillllll *ill
! Illl[]lllllllll[lllllllllllllillililllllllllllllllll _ Iili[llllllllllllllli[lllll[
IIIIIIIIIIIIIIIIIIIl[lllllllllllli,,lllllllllll I--_: ] I I IIIIIIIllllllllll[ll]lll _111111111
IIIIII111111 1111111111111 IlllllllllllllllllllllllllllI i 1 I I IIIIIIIIIIIIliilllllllllll
l I I IIIIIII1111111111111111111111
............................................... II::I:I.I I I I iiiillllllllllllllllililtl
I 11 I 1 I lllll]lllllllllllllllll I iiiillllllll •
I I IIIIlllllllllllllllllllll[llllllllllllllllli IIIIIllll] IZ I Ililllllllli|lllllli]lll I 71111111111H 11 I I I I I1111111111111111111
i i II IIIllllllllllllllllllllllllllll 111 I 1 1 I IIIIIIIIIIIIIIIIIIII _ I I I 11 IIIIIIllllilllllll[ll[i I ........ IIII ............. ,,,,, ................... II ......................................
z 11 . ........................... ,,, .................. ,,,,,,,, ............. __:II".,',:I'.
es'_ ee._ os.¢ ee.c e_'_ ee'_ es'_ ee'_ es.o •@ _7) 81_Sl
232
l.I"I)
(:_C)
LF)
l-ii.

C
0
3E°-
u_
°_
0
>.
>-
t-O
_Jt-ara
0t-
_n
_n
DCu
E0U
0
t-
Ou_
L-
E
il°
El
CL
U°--
(3.
0
U
°-
oI
UoI
E >
L U
_ °--
0-'_ c-
O L
m 0
U E
m m
0
_ m
.._ c"--k-
4._
r _
°--
E _
o_ f-
0.._
1- >
c-
O _
U
UoI
3_ 3--
O
U
-_ °_°_ i,-
c- t_
°-- m
I I
m m
1" r-
E
¢-
E c
0 --
O _"
o _- .-
"_ O
°-
233
234

TSS-I Dynamics Flight Experiments
Gordon E. Gullahorn
Smithsonian Astrophysical Observatory
PRECEDING PAGE b-'1.ANKNOT F}LMED
235

Z
X
h-_
Z
I
0
0
Z _
• _
Z©
H
0
_DCO
_D
>
z_0
Z
£0
0
©
r..)
237
_"_I_C._D;NG PAGE BLANK NOT FILMED
238
H
I
E_H
0
0a_U,<
0
Z0
,<
I--4
0 •
),--I
,<
_ Ae'.°
Z
,<
> o_o ,-t
Z -
_ x_"_Z
O_ .<
0
_ • • • •
0
ZH
V_
Z
O_ _
_ . . . _Z _
Z
<>
ZO
ZO<
0
<
0_
-ZO_0_
mm_
oo
0 • • •
mulI-t
239
L)
or]
iJZb.l
Ot
ila
i.d
¢/1>_¢/]
Ld
¢/1
b-I
[-4
¢Xl
II
N
N
III N N
r0 oO O ¢xl ,-4 1.13
O O O O O
0 ZZ _ 0
Q 0 _0 _ _ _ H
0 0 _ _ _ _ 0
•- _ i i _
I I I I
L_
O
OZH
{JH
:E
6L_
ZO
=E
(JI--'4
_d
c_0
<
1"4
_ Z
0
I-'t_J
T0 o
ua J _:ul ul _
_ _ , ,_ ' ,
m o
@ •
240
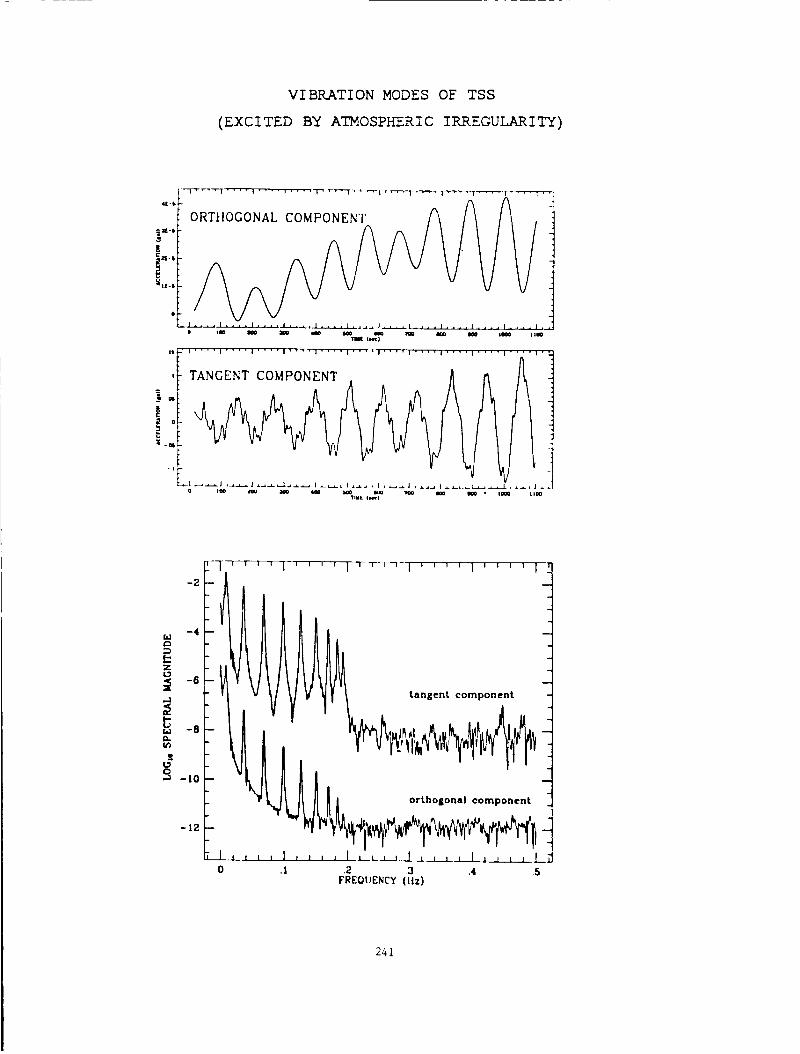
VIBRATION MODESOF TSS
(EXCITED BY ATMOSPHERICIRREGULARITY)
F'-F "I-_-'-"I .... i .... i .... -[" _T'_-T+' _ _-i " _-]-_ I .... I .... i .... I ' "
Zl-_
11mE (_)
-2
-4
r,,.1 -8
e
o.J -lO
-]2
11 i'n'entc°°P°°'°'
)T, I , , , , I , , , , I --L, ,__L_t , , , I , , , , LZ0 .1 .2 .3 .4 .5
FREOUENCY (llz)
241

0Z
Z0
ha
0
0
Z
Z
Zha
Z0
Z
Z
C__a
0
ha
00
or_H Z
>
ha_
0
0
z I_ L_
- _ _:o _
_o =_ o__o0
z_ar_
_ZZ_haO
ha
_<0
_0_
r_
O<
II _
0_a
Z
Z0
<
Z
_0
Z
Z
_0
ZH
Z_
Z<O_
Z
¢_ Z0
II Z
Z _ 0
• < <
242

00
243
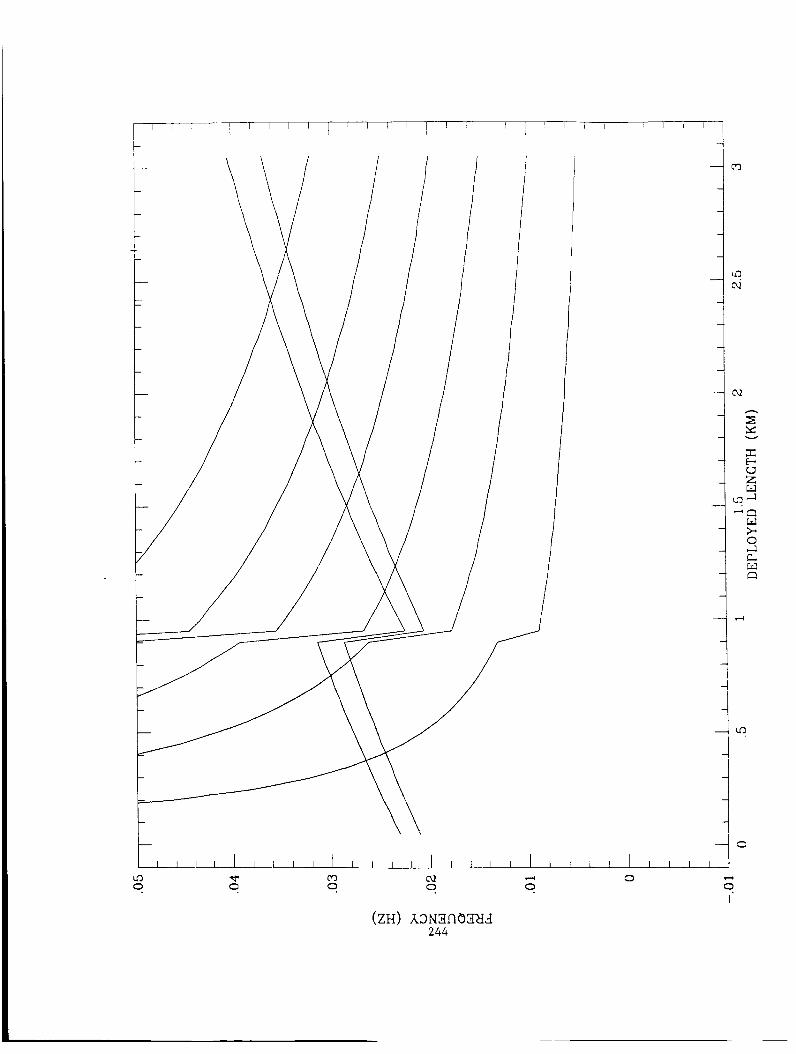
/
CD 0 0 0 CD
244
oo
i

Z
0.,_]
>
C_
C_
?:
Zo _:
0
o __ 0
_0_C_ H u_ [m
_ZC_,_0
m_
I HO_
_Zul_C_O,_ _
Z
Z
Z
Z
0
0u_
%) 0,_ 00 ::=
_gS"
_ 0
m m
0
ZZ __0 _
_Z _
O_Z_
Z__ _0
m zm_ _
_0
245
H
Z
Z zZ
_0Z<
Z_o
r..) H _z oo_r..) _
0_
_00_
OOm_
_0 _
m
ZZO_ M M _0 _
Z0
0
0
246
N
Z
Z
_0_
_0_Z_I
H H
" ZZ_M_0_H _ N
_0
_0_
_0
o_ o
247

Tether Simulation Design for Mission Planning and Analysis
Richard M. DeppischNASAJohnsonSpace Center
Yashvant JaniLINCOMCorporation
F;.W..._.NG P_E BLANK NOT FiL_._=D
249
LJUl
PRECF.DiI_ PAGE.BLANK NOT FILMED
251
f
UUl...,)
o
o{3ZuJ
Z
- _':E u.II-- S, LU 1---- _- Z cc _- <:
Z '_ Z O _ v_ _; ,_O _ uJ -- w >.I--- I-- Z uJ u_ ___.L9
IJLI
._J ,.,,, O. -- uJ ::) >- Z
,_ :) , , ,= 0 > QU U
.. z z _ u C0 0 0 C_ 0 u_
0 .-J ._
_ _ LU • •" _ _ _ • •
l
h"
LU
Z<
LLIc_D
LL
LUh-
C_ u__' uaZ) --
QZ0
D
w'_ LL
• •• •
z0
>5
z,<
z,<
@z
z
z@
J252

ULI
LU
I
uJEl
Z
253
0O.@.
0 z
o
xLU
Z 5Z
_- z
Z z
Z zoF- z
mln_ _k
k9_u z_- 0Z
o _0.,,I>.
0k-
J

f
254
Z0
>
>-
Z
Z
Z
ZZ
_=
Z0
J
e_, m,,:,l ,l o l, i • ,l
z o
255
Z0
>
<z<
z.<
0zzz.<91
Q.
z0

U
= 2W
°<
iL.
i_I_I_I_I
I I
256
Z-0
>D
0
_J
<Z
Z<
0Zm
ZZ<.,.I
Z0
J
w
:>
LU
,._ 0
257
m
>.
<Z<
Zm
c_I.iJIJJZ
ZI.IJ
0
0
Z0u0
,_J<
zo
>
ul
)..,ml
<Z<
Z.<
(3Z
Z
Z0
J
EL'
Z0
>
)-.d
<Z<
c_Z<
0Z
7
0
J258
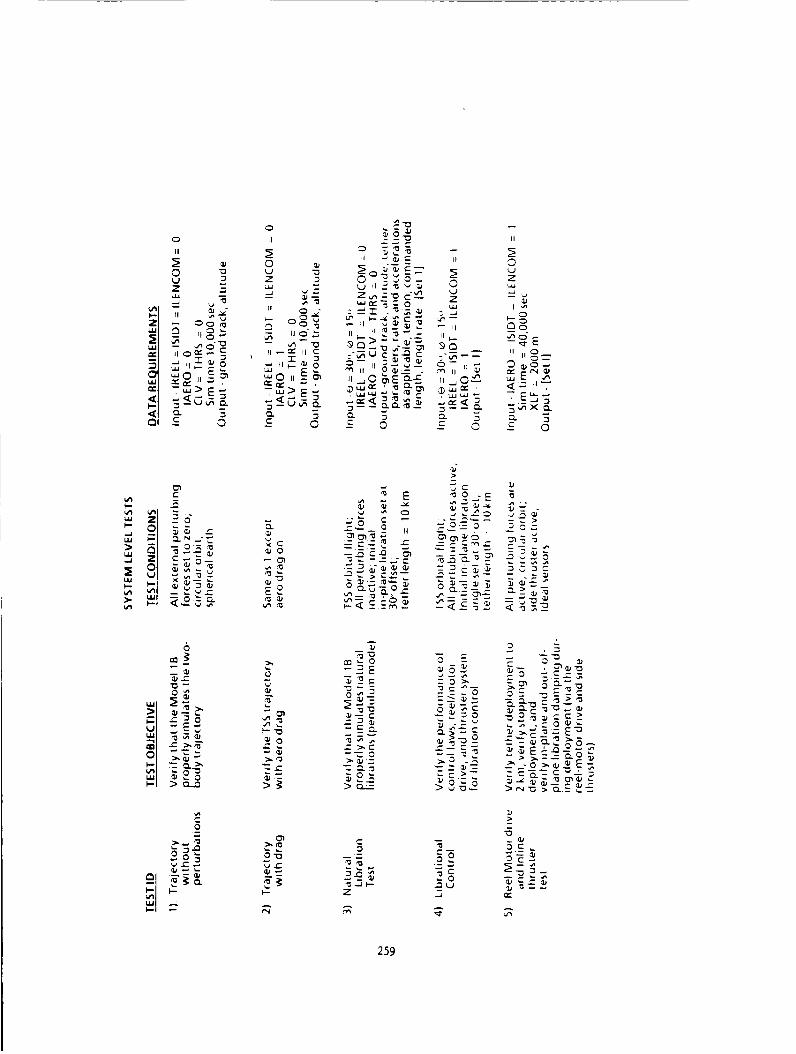
0
fl
© 'o
Z
I-- oo _
r_ F_oo _
c o
0
_.# .-_
Z
- _-_
-- _ "0
II- 'Y II _:
_o ,,_E,
E 0
,._ 0 Z
" ,- " ,,_ ,,3_-_
.,,,. < = ,_ - -E_,S
E o E o E o
I--
ELII--
,,-,,
LU1--
>.
..5
-- 0- C).
S.
_c@ 0
E_o
_, .._ _-_ _,-_"
Z____ ,, __-_'_ _o_=
,,,- _ -o'_ _ -=_-<._.:_- ___=_ _7_
6
0
0
_--5c=E&
--"%0:_ _ =,
0 -
-"_=$3
___ .c" 0_
C'_ ---- '0 :_--
_,o .# - • :,,-=- -- _, " _ _-- _ _._ , _
,-, >_o _ _.._'£
o 5
= 2= -: - 5_
2.59
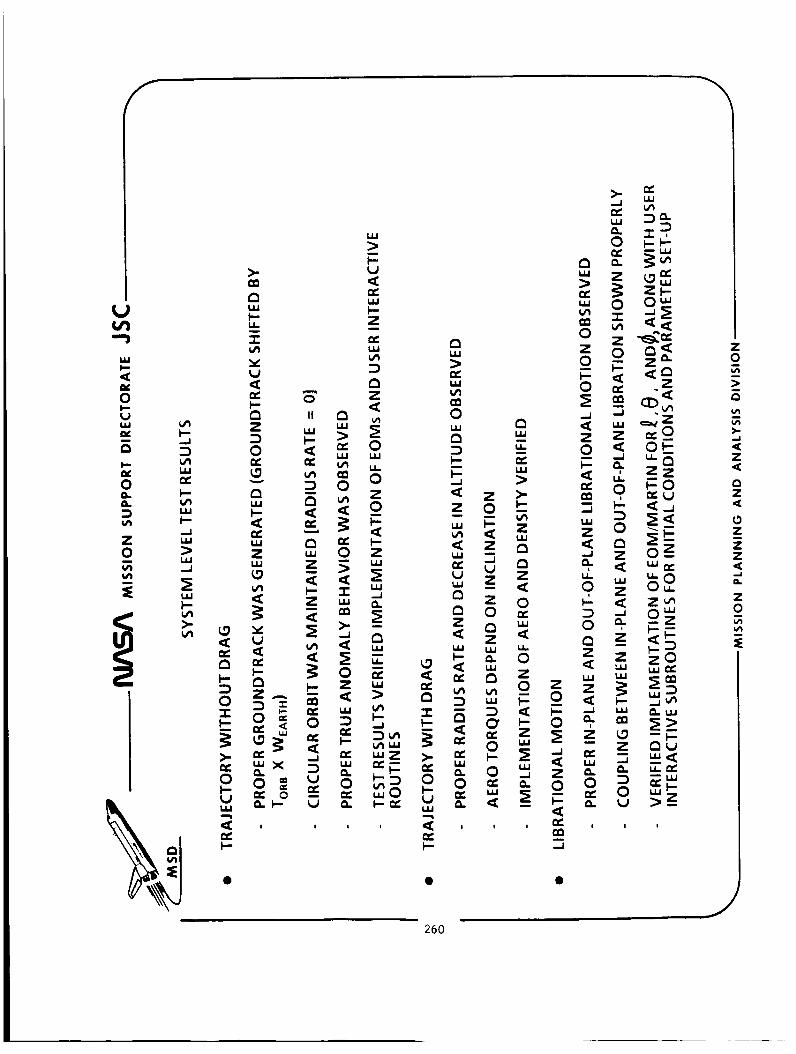
260
Z0
>
>.
<Z<
Z<
0Z
ZZ<
Z0
J
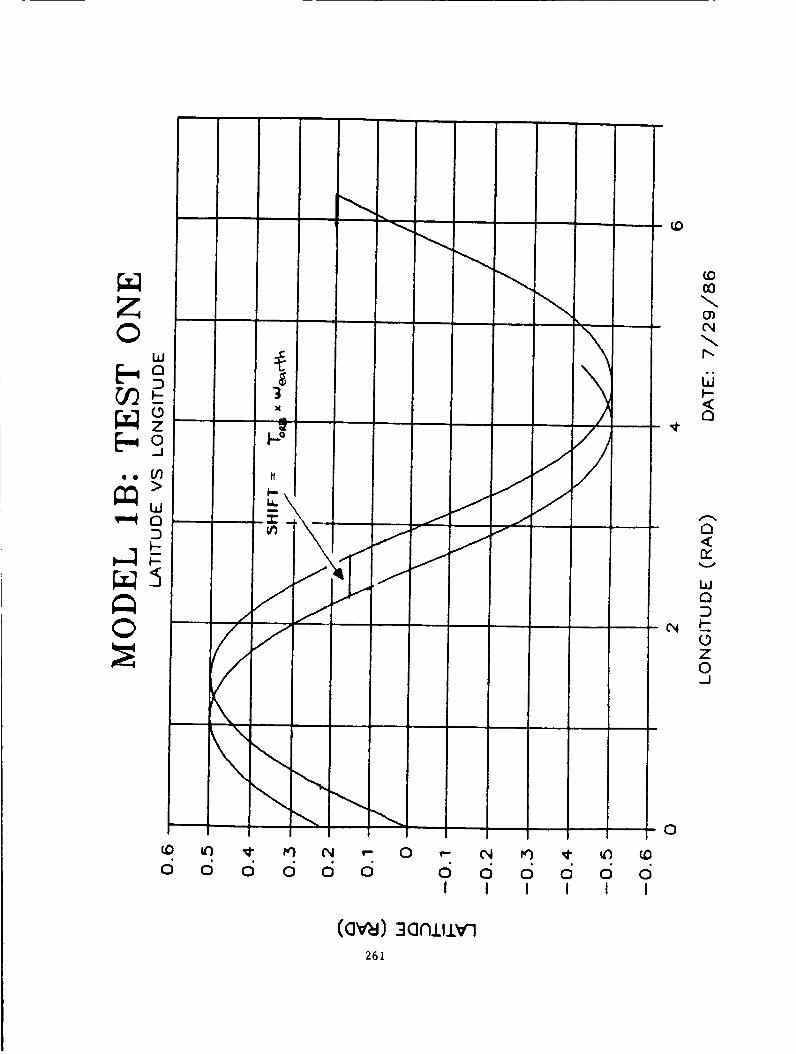
Z0
W
E-oJ
W
0
_D
X
/
/
J
/f
//
dI I I I I I
_D
0
00
O_
0
r_
W0
0z0..J
(ova)3onll±_q
261

6.6694
MODEL 1B: TEST TWO XINC=O.OORBITAL RADIUS (M xl.E÷O6) VS TIME
6.66938
6.66936
6.66934
6.66932
6.6693
6.66928
6.66926
6.66924
6.66922
6.6692
6.66918
6.66916
6.66914
6.66912
6.6691
0
-0.1
--0.2
-0.3OLu --0.4
--0.5
_"_ --0.6uJi
--0.8
_' -o.9gE;_g -i
--I .Im --I .2n-O --1.3
--I .4
--1 .._
--1.6
0I I I I I I
2 4 6
TIME (SEC)
MODEL 1B:
I I I 1 I I I I I I I I
8 10 12 14- 16 18(Thousanas)
DATE:8/05/86
TEST TWO XINC=O.OORBITAL RADIUS RATE VS TIME
20
2 4 6
TIME (SEC)'
8 10 12 14. 16 18
(Thousanas)DATE:8/0._/86
262
2O
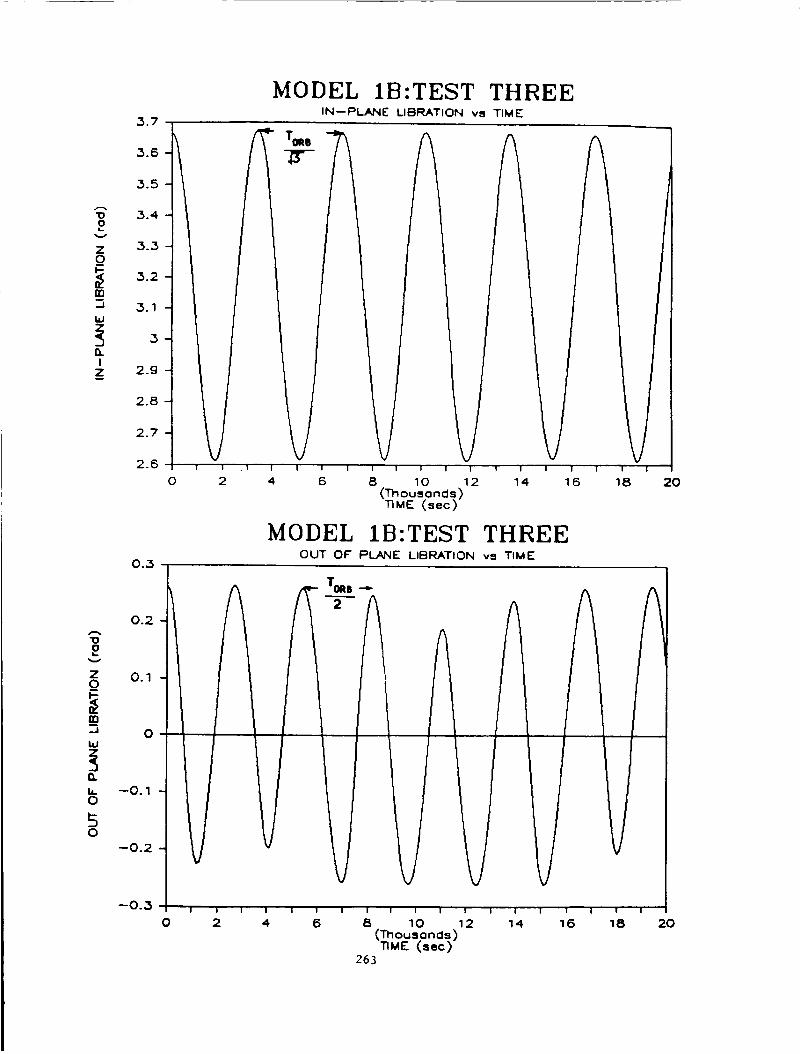
3.7
MODEL 1B:TEST THREEIN--PLANE LIBRATION Vll TIME
s--%
"oo
Z_o
m..I
i.i
0.I
Z
3.6 --
3.5-
3.4-
3.3-
3.2-
3.1 -
3-
2.9-
2.8-
2.7-
2.6
0
0.3
I
2.I I
4
A
I I I
6! I I I
14 16I 1 I I I
8 10 12(Thousands)TIME (iiec)
1B:TESTMODELOUT OF PLANE LIRRATION vii TIME
THREE
/
VI I
18 2O
0.2
0.1
o
a.
-o. 1
-0.2
-0.3
A
0 2 4 6 8 10 12(Thousands)TIME (=ec)
263
A
14 16 18 20

Z i i i ¢ s Z ! ! ¢
0 0_._ _J
z0
>
>...==i
<z<
_3z.<
0zi
zz<
z0
_5
J264
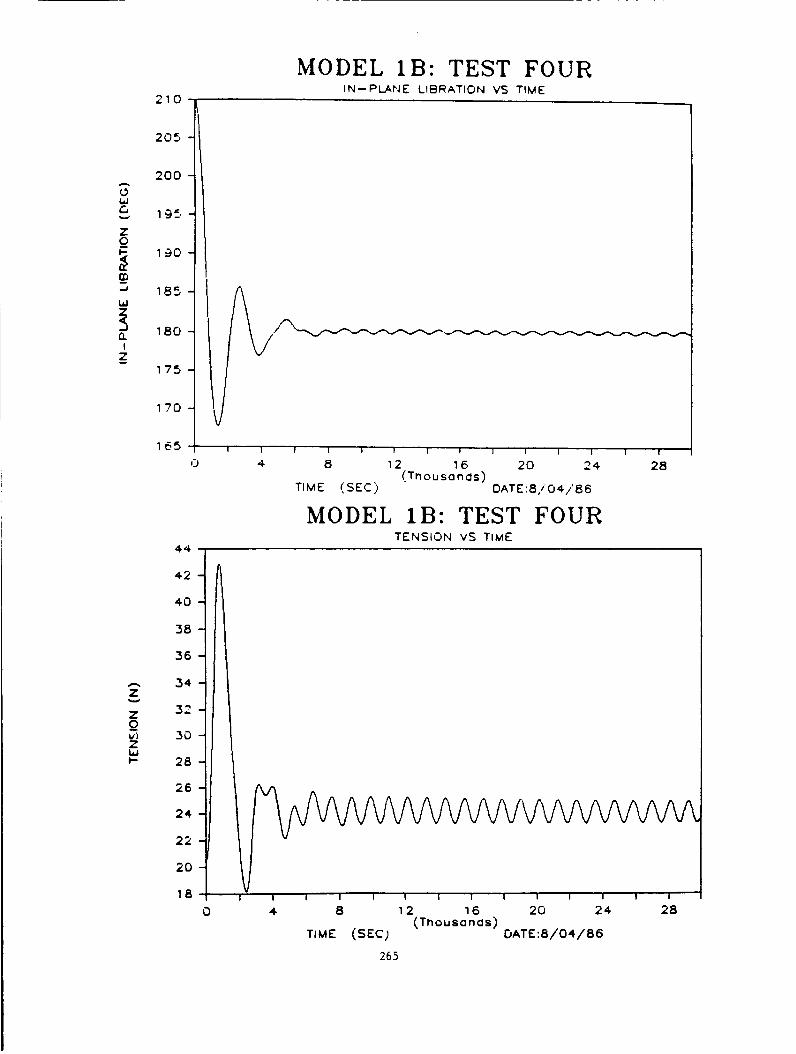
210
MODEL 1B: TEST FOURIN--PLANE LIBRATION VS TIME
OI.ut',
Z_o
hi
13.I
Z
205
200
195
190
185
180
175
170
165
L)
4,4
I I I I I I I I I I I I I
4 8 12 16 20 24 28(Tl_ousoncls)
TIME (SEC) DATE:8/04/86
MODEL IB: TEST FOURTENSION vS TIME
Z
Z_ov)ZWI.-
42-
4,0-
38-
36-
34-
32-
30-
28-
26-
24-
22-
20
18
0
I I I I I I I I I I I
4, 8 12 16 20 24
(Tl_ousanas)TIME (SEC) DATE:8/04/86
265
I
28
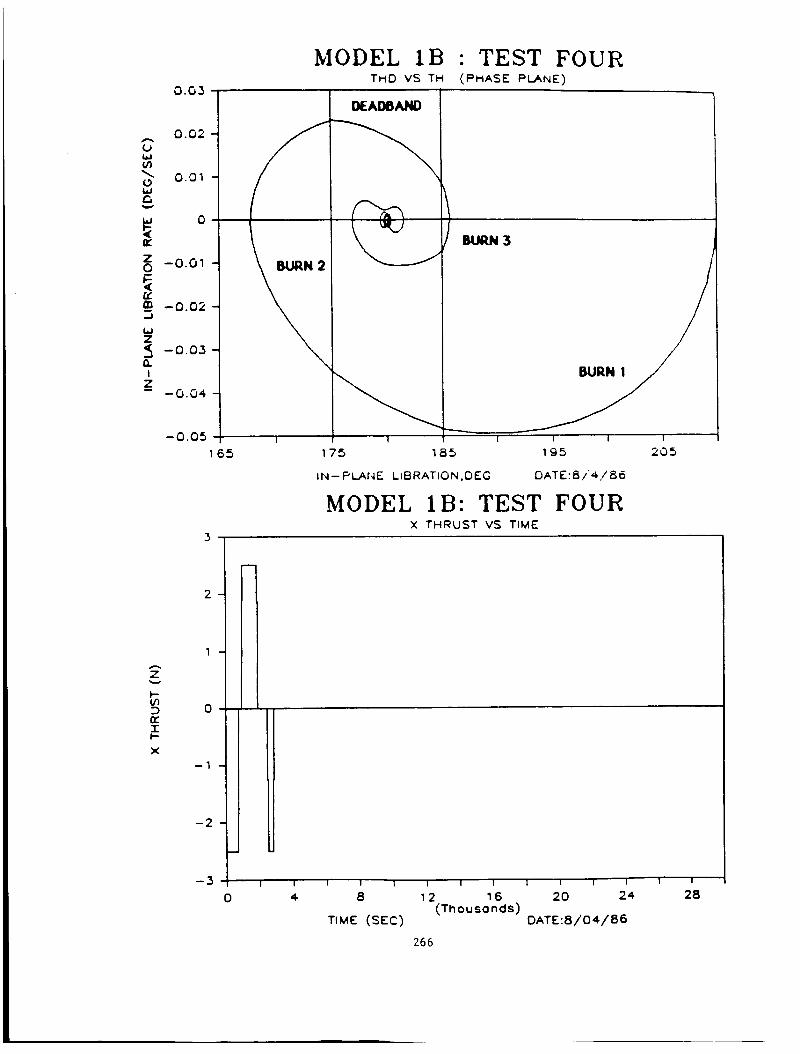
0.03
MODEL 1B :TEST FOURTPIO VS TH (PHASE PLANE)
0.02
0.01O
IK
Z0 --0.01
__ -0.o21J
Z
_ -0.03
I
_z--0.O4
-0.05
16.5
DEAD6AND
BURN 3
I : I
17._ 185
IN--PLANE LIBRATION,DEG
MODEL 1B: TEST FOURX THRUST MS TIME
I I I
195 20_
DATE:8/'4./86
Z
l-_q
n_I
x
-1
-2
-3
4 8 12 16 20 24 28(Thousands)
TIME (SEC) DATE:8/04/86
266
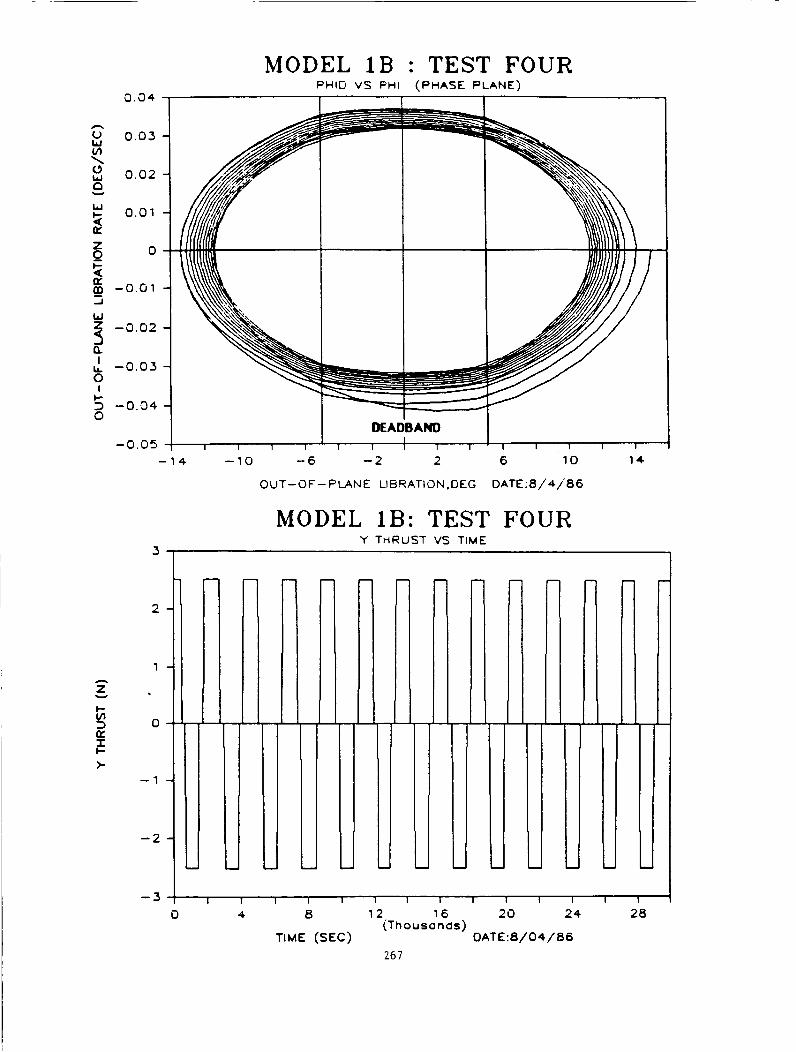
MODEL 1B : TEST FOURPHID VS PHI (PHASE PLANE)
0.04
003 __-'--- __
dl
g o I : !J/JC --0.01
--0.02
I 0 u 0 _i
--0.04
O
(9
OEADBANOi
-0.05 , ,
--14 --10 --6 --2 2 6 10
OUT--OF--PLANE LiBRATION,DEG DATE:8/4/'86
14
3
MODEL 1B: TEST FOURY THRUST VS TIME
2
1
Z
i-
n-
>.
-1
--2
-3
8 12 16 20 24(Thousands)
TIME (SEC) OATE:B/04/B6
267
28
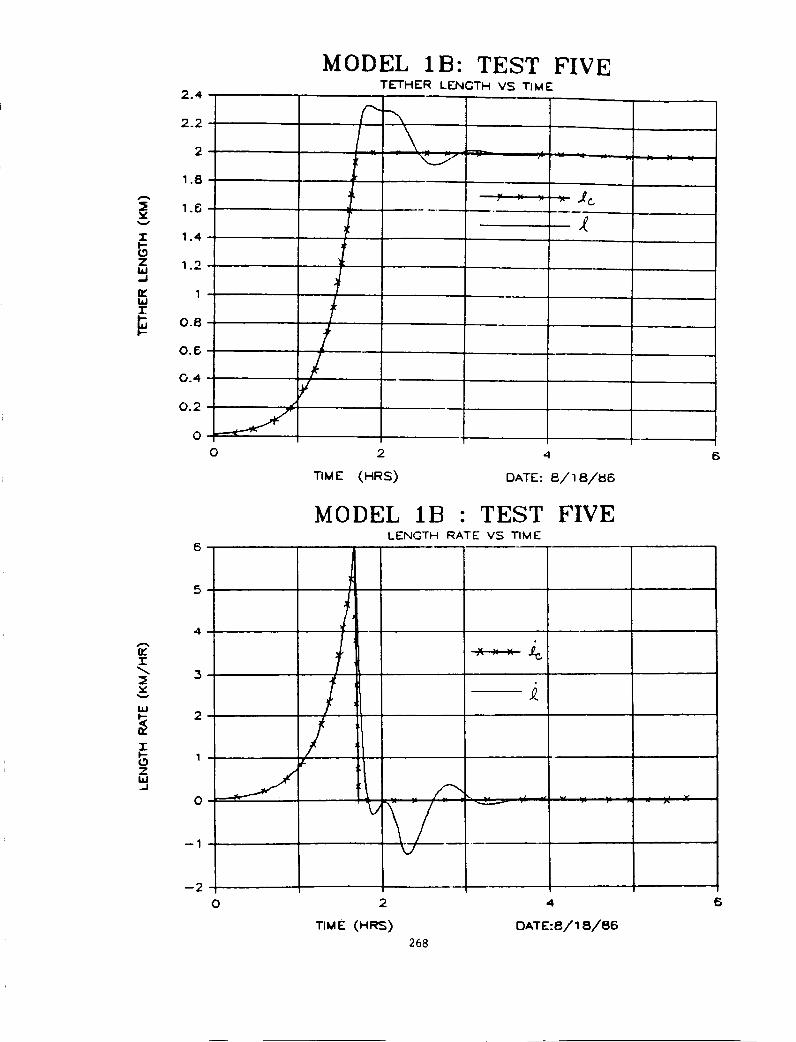
_r
2.4
MODEL 1B: TEST FIVETETHER LENGTH VS TIME
2.2
2
1.8
1.6
1.4
1.2
1
0.8
0.6
G.4
t
!/
D,1"
,¢
to
1"
Zto_l
6 °
5
4
0
in 1 ,-_
2 4
TIME (HRS) DATE: 8/1 8/_6
MODEL 1B : TEST FIVELENGTH RATE VS TIME
--2
L
0 2
TIME (HRS)
268
4
DATE: 8/18/86
6
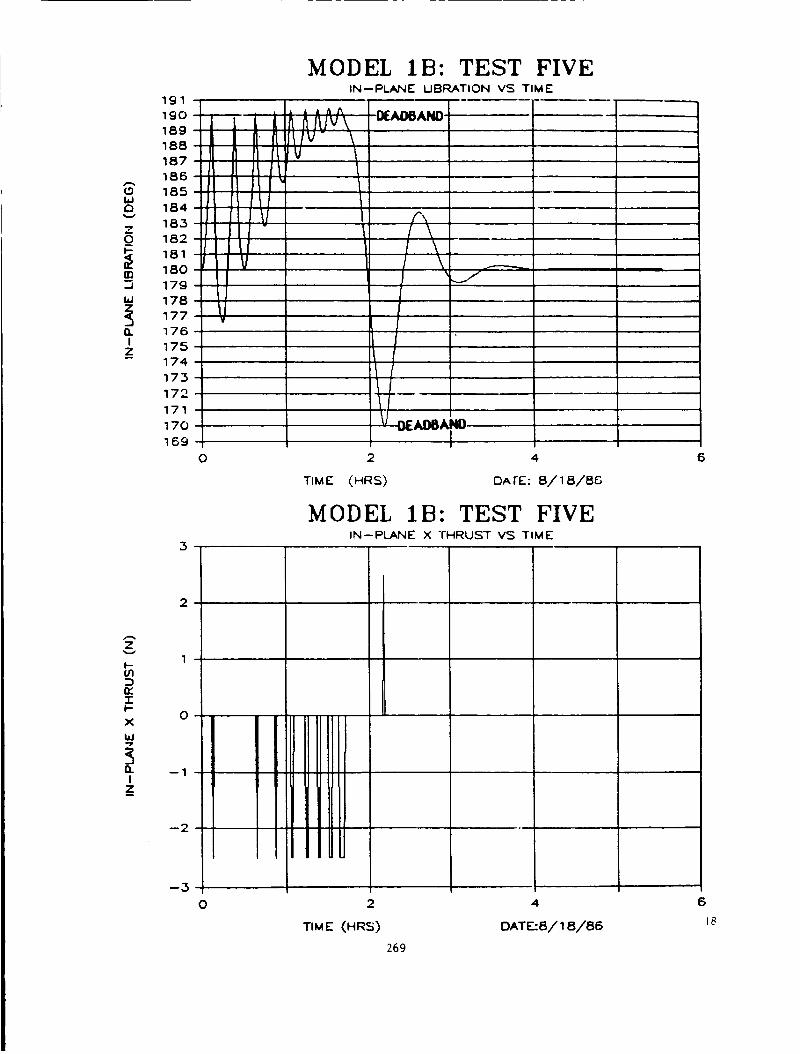
191
MODEL 1B: TEST FIVEIN--PLANE UBRATION VS TIME
Qv
Z_o
m.J
hi
nI
_z
190
189
188
187
186
185
184
183
182
181
180
179
178
177
176
175
174
173
172
171
170
169
3
0
iIL
v
2 4
TIME (HRS) DARE: 8/18/86
MODEL 1B: TEST FIVEIN--PLANE X "FHRUST VS TIME
6
2
Z
I--
n,II-x
bJ
O.I
Z
0
--1
--5
I.....IiiiII IlUU
0 2
TIME (HRS)
269
4
DAT_8/18/S6
6
18
270
Z0
>.1J
.<z,<
z.<
Ozzz,<a.
z0
J
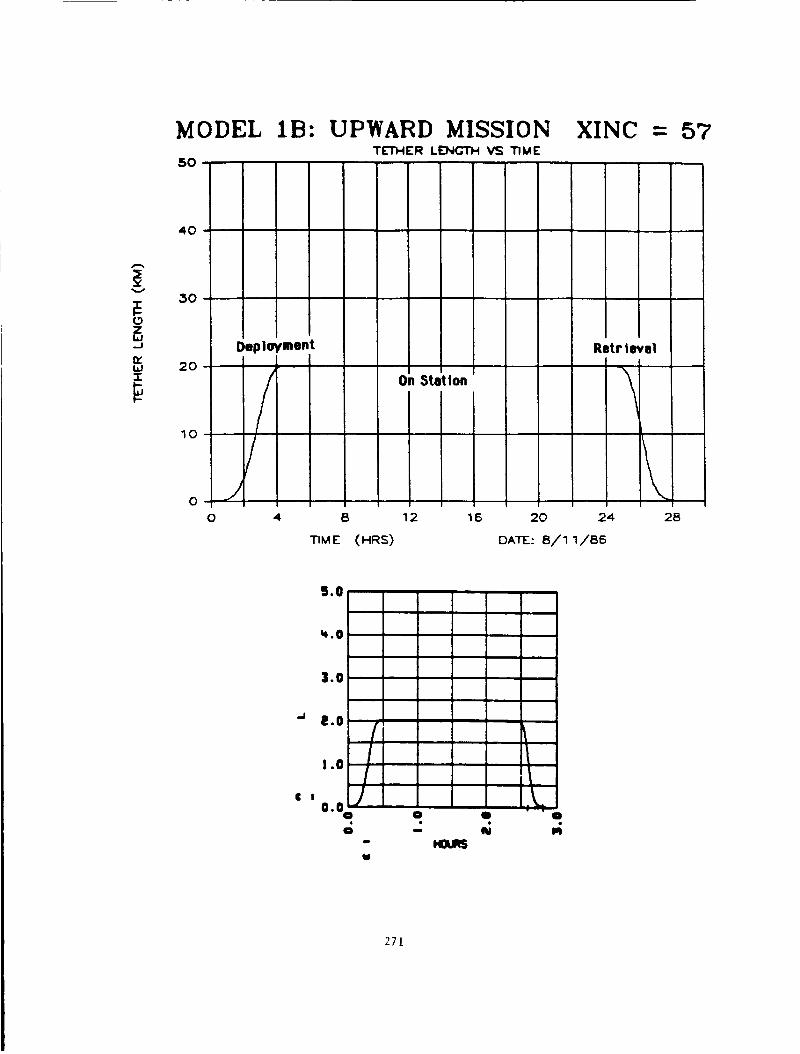
MODEL 1B:
50
UPWARD MISSIONTEn-ER klEl_'m_ VS TIME
XINC = 5?
4O
O5.J
LJJT
30
Deployment
20
o ...,20 4 8
TIME (HRS)
On $tetion
12 16 20 24
DATE: 8/11/86
Retrieval
28
5.0
_.0
1.0
I !
!.0
1.0
Oe
I/
J
U
0
m
o
III.L
Q
iii
271
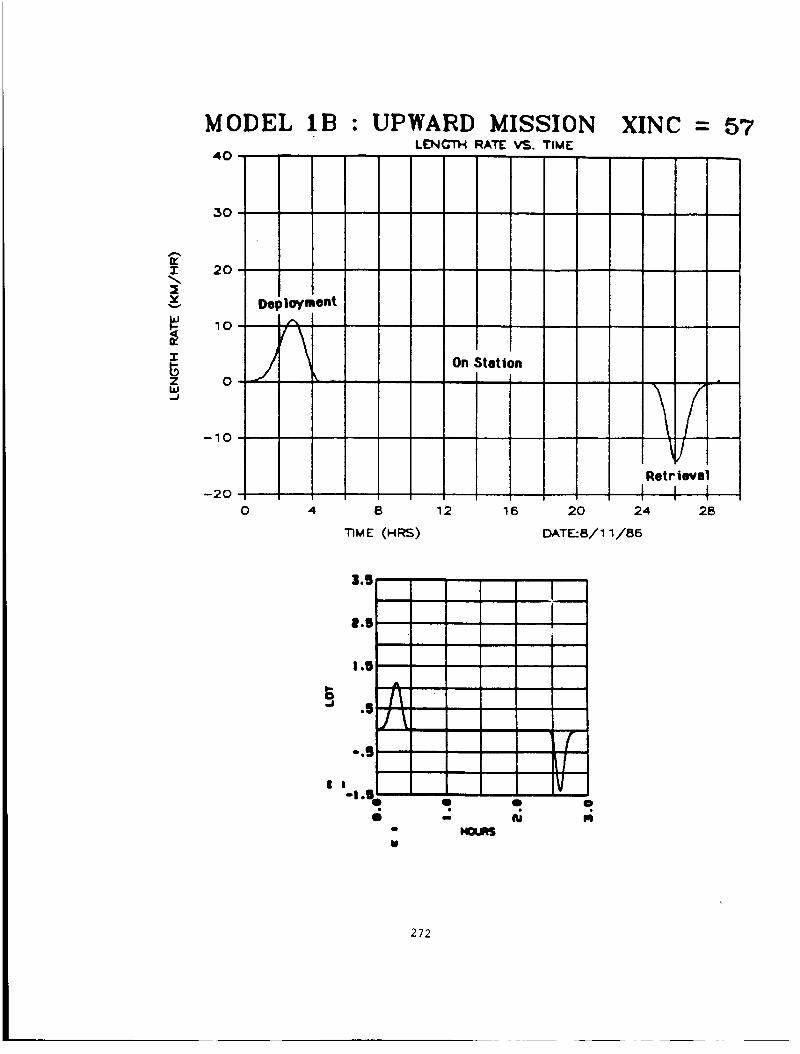
MODEL 1B
40
: UPWARD MISSIONLENG'T)-I RATE VS. TIME
XINC = 57
_0
rrI 2O
,_. Deployment
_o /
jW,.J
-10
-20
0 4
On Station
12 16
RetrievalI I I
20 24 28
DATE:B/1 1/85
].5
e.S
I.S
"J .11
-.S
1 !I I
X
/\[/
UQ 0 0
•- Itl MHOURS
272
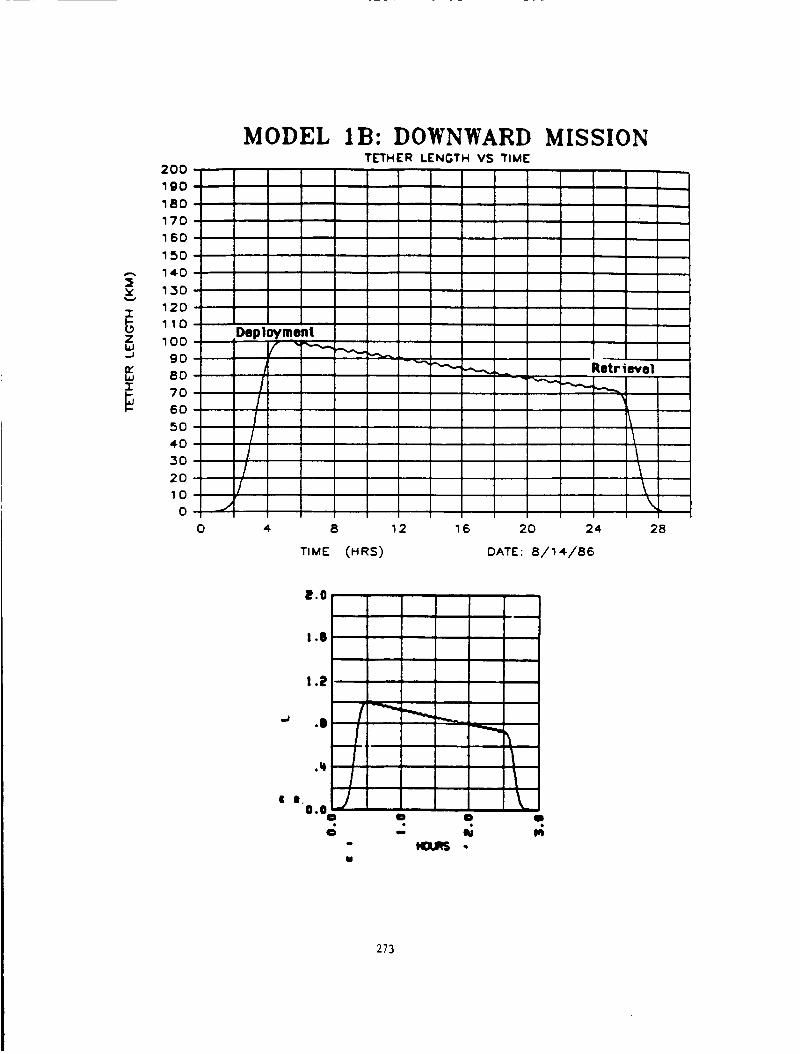
_m_
%.4
_r
ZW_J
Ld
20O
190
180
170
160
150
140
1.30
120
110
100
9O
80
70
6O
5O
4O
.3O
2O
10
0
MODEL 1B: DOWNWARD MISSIONTETHER LENGTH VS "rIME
,Deployment
_ _ _ Retrieval
/ t4 8
TIME (HRS)
12 16 20 24 28
DATE: 8/14/86
e.O
I.II
t._
0e
w
0
w
0
t;Q
Pl
273
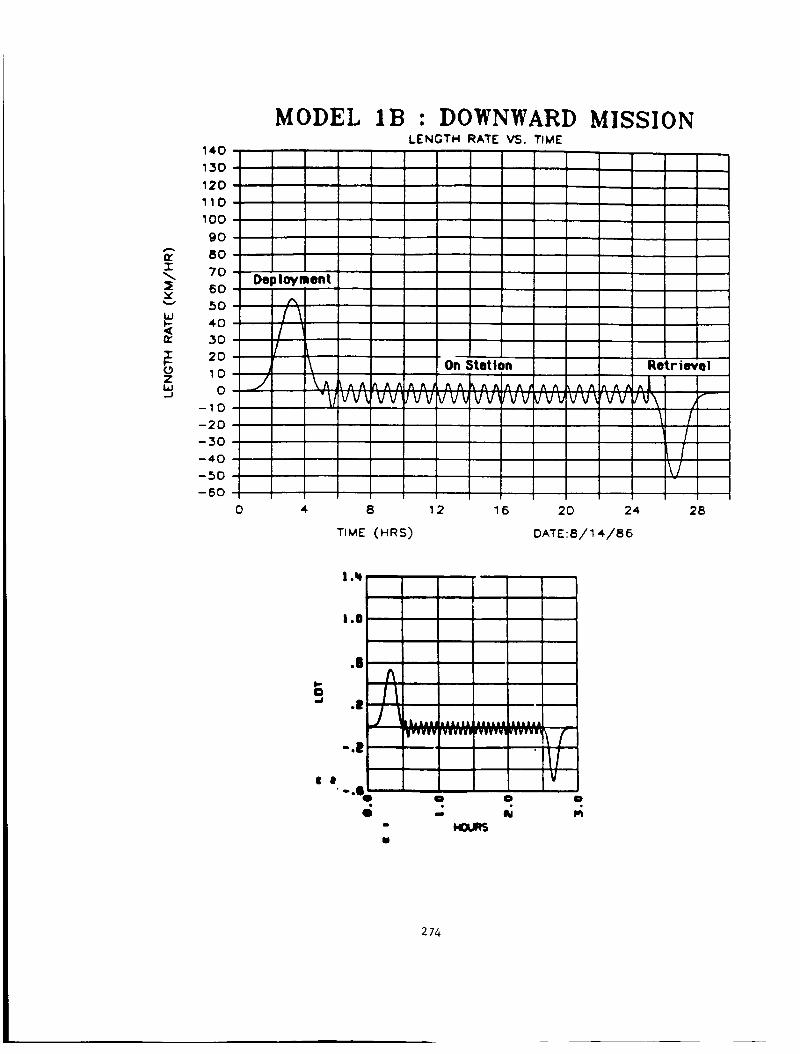
n,T
Y
l.i
n,
OZi,i.J
14D
131;)
120
110
100
90
B0
70
60
50
40
30
20
10
0
-10
-20
-30
-40
-50
-60
MODEL IB : DOWNWARD MISSIONLENGTFI RATE VS. TIME
Dep Ioyment
/\/,
\ On Station
•Vvv_ vv/vv;vv_vv Ivy^/_ AA h A_
JV_VV_ VV
Retrieval
^1
0 4 B 12 16
TIME (FIRS)
20 24
DATE'8/14/156
28
l.ll
1.0
.IIA
I,-= II'J I
¢ •• _..|
i
w
|L=JSaili IAAaIA IdkAJL&akA! AAiJ&A
_VlV rvlv_l lVlVlVl VIVIVl7
Vo o o
274
-_ 0
iJJ
Z0
>-..J
<Z<
Z<
0Z
ZZ.<
Q.
Z0
J275

f
UUl
Z0
<{
ZLU
LU
LL
0
ZuJ
Z0
lal
>-
<Z<
Z<
OZ
Z<
Z0
J276
II
ADDITIONALPRESENTATIONS
277

Preliminary Analysis of DampingEffect on Tethered Satellite
Giovanni BianchiniUniversity of Padova, Italy
t[_RF,._ pP.GE __ANK NOT FILMED
279

o
6_T .
_ _ o
o_ _ _ _-
2
_ __°o_
WOL
v
_nwLnL_
(N
\_nwz>-r_
X
-_ r,.
0\O__0
_0
_nz
T 0 nz j
bq Z O_ W O
W n_ W Q -- 0_" W n_ CO
T 0 W Z wn_ _- u_ __ "_ n_O_ W '-4 0 0 ,-
Z0
W-(_ 0 0 0 0 0.J
In
0
281PRECEDINGPAGE BLANK NOT FILMED
UlW
JJW
W
WI
W
Z0
N-
WU.U_W
Z
0.
Q
b.0
t-q
)-J
Z
Z
.JW
O.
z 6W WZ 00n n•- 00 ntO n
.J Z(3: w,- w0 mO:OL w
W O:T "1"
ZO 0Z --
0W _-0"I bJi- i-
Z -J
O: bJ
Z tno I-. rn
Z LnW_- OJ
T
0b.0
0-Jn
0
W0 T
n_ b.0 0b.n/ UIW W
JZ EWW• 0
Z
ZU_ O
• ZZ O
zW _rv
Z ,-,
_ w _rv (I:_- td rvE b.121 _ O
m _z,-, 0.T rv IE!-- O E
U. OIEO
O
282
Z0
m
ozo(.3
zo
I-D
ntF-
w z-r o
..J I,-J Z
(J
I-,- b.Z ,--,
U (.'.'3
W lrlo.
w
0 _ Z_- 0 0
nl .-
bJ O:b_ Ol mO: ILl ntW 0IX 00 _- ntW WO Z O.
00 -- ILl
_- O: --O: nl .Jnt rn _j
•- ILl
Z O:•-. J O_n O: Is- Z m
0 (3" 6'I"I
W _- bJ
_- f_O F-Z
_- 0 0.- .J
283

F-UWb.b.ILl
Z
0..).-
o
wk-
..JJW
0w(_WTF-mLd
b.Q
tnt.dtn
)-t_LdF--
Lnzo
_-_0-zo-z_"oo
bJjnl
e-9
Z
.0O..-
O:Er_n/
LnbJ
c_,,oZOO
W _
t _u _
O. hlXUm
ZO
I'-
O:69m
_n
Zo
_3
+
tO\
W+.
(NO_
(N
Wtn
to
inin0:
zo
o
o
I
0:in 69m In
in _-
z zo o
o (J
c_ c_(N (N4- !
lO
m"W
_JldIn
(N
O:_nm
Lq
Z0
C_
0
4-
_qw
c_
c3
0w
Z0
Z0
_nzw
b_OOZ
U_Oo_rnObJ_jr_
(N
WLno:u
LnO:
W
O:6q
_OW
(:3
c_c_c__N
0W
ILl
0\ \
O_\CO
_0\O_
z 6r_z
s-(
284
(M M3
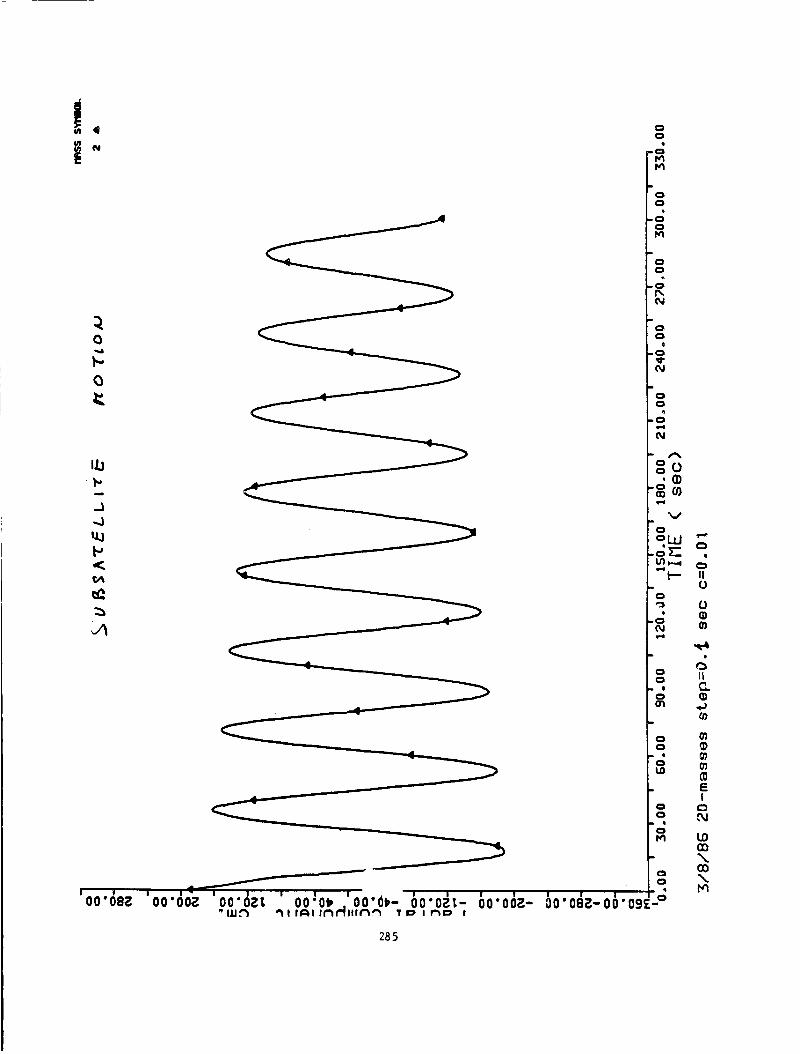
0

e4+XO4-KhI_X]I_-O 0 --o
Q.
O
w
/,III
I
I
ti,
4
i K
v
ii
],
],
n
tT
I 1.
Jj ,
• ql
J.,i
J.iI
"i
,:1ttI IIIII IIIII IIIII IIIII IIIII IIIII IIIII IIIII IIIII IIIII IIIII IIIII II I! IIIII IIIII.IIIII IIIII IIIII
I| i I || 8 Iiii _,i, i, ii _,ii il il ii ii " " " " "i, ii ii ti tt tt tti
i i i i t J i I i l , _ i _f t i i i286
o
0
0
rkc_
i
"o
al r'
e=o
a)
i'le=i _i
_o::::)
tii
" 4--
t,0
\%
/ _. e'0
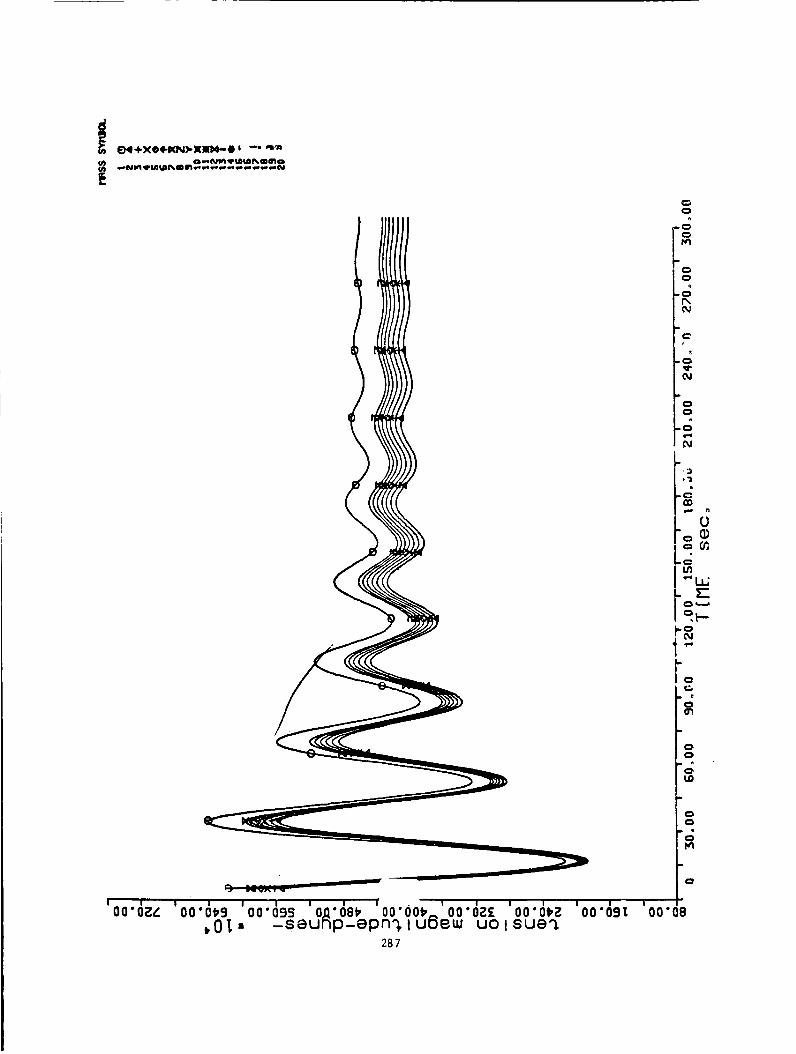
0
a
(::)
| !
00"0_(.I I I I I I I . I I I
oo'ot,s oo'oss o_'oet, oo'oot,., oo'o_ oo'_t,z,OI, -seunp-epn_luoe_ UOlSUe'_
287
I I
O0 "09_
0
Q
0_q
C"f
Od
B
0
a
-0
I;n
0" O)
It)
"ILl
_,t---0
OJ
.pd
D
0
00")
0
0
0
U_
oo
o
O0"08
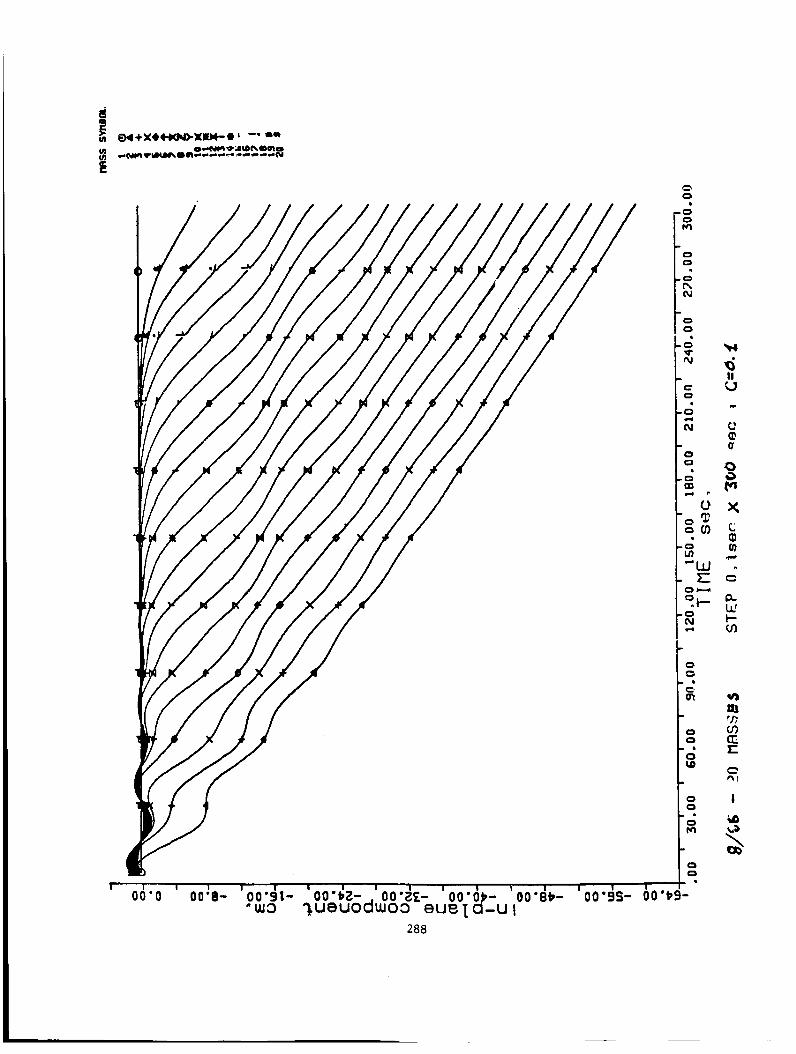
[ ! I I I
00"0 00"8- 00"91-"WO

04+XO¢-KN)-XII£1NI--O n "_ _Q
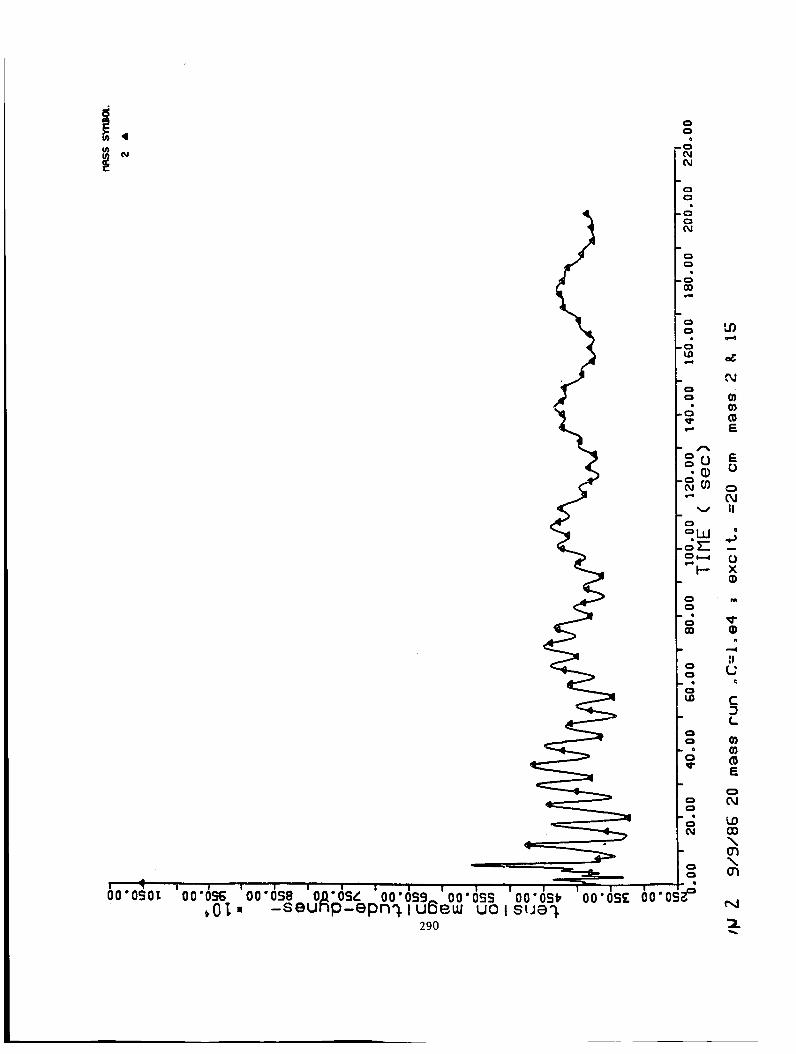
oo'osoz oo'oss oo-oss o_'os,' oo'oss_ oo'oss oo'os_ oo'os_,0I • -seunp-epn-_ ! u_e_ uo Isue'),
290
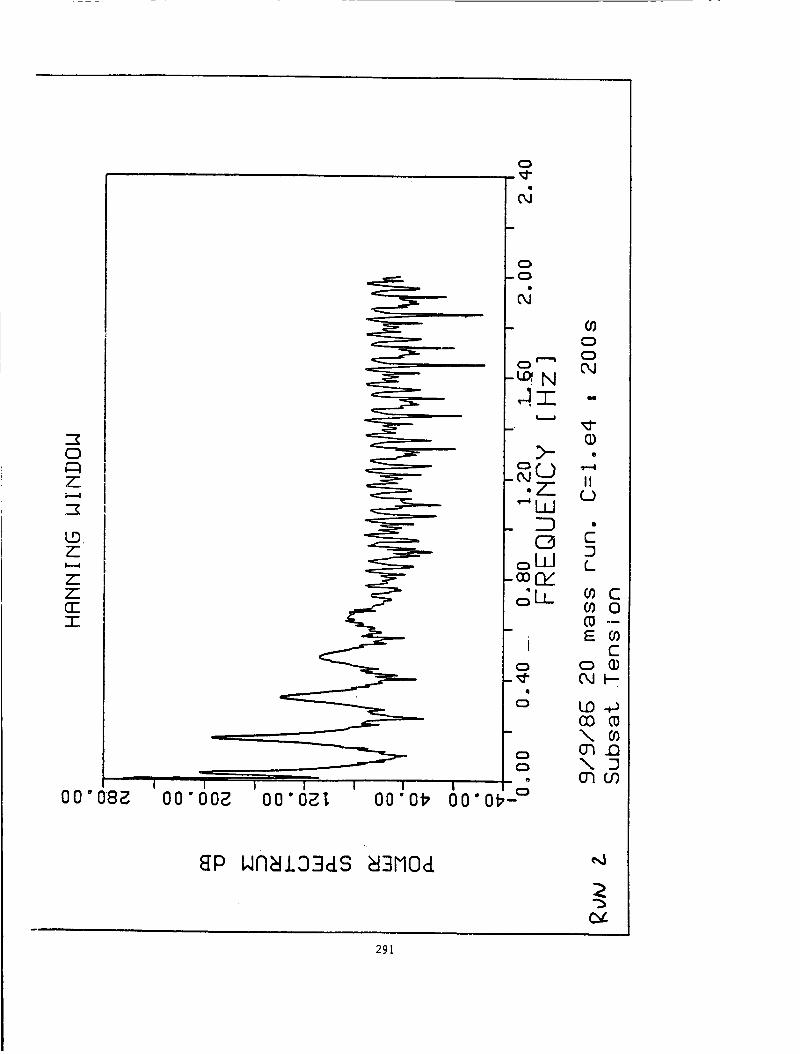
0
Zl
Z_
7"7"(KI
O0 ° 08_.I '1 I I I I
00"00_ 00"0_[ 00"0_
o
c_-o
-u_NJ.i
>-
,7-_W
c_LL..
-i
Q
c_
Q
00" 01;,-
O)
C_
OJ
0Q
II0
I
CDL.
CO CCO 0
E 0')C
o (1)OJ i.--
LD..PCO (1)\ COO7.O\ D07_0
_P wnai03 s W3MO_
C_
291
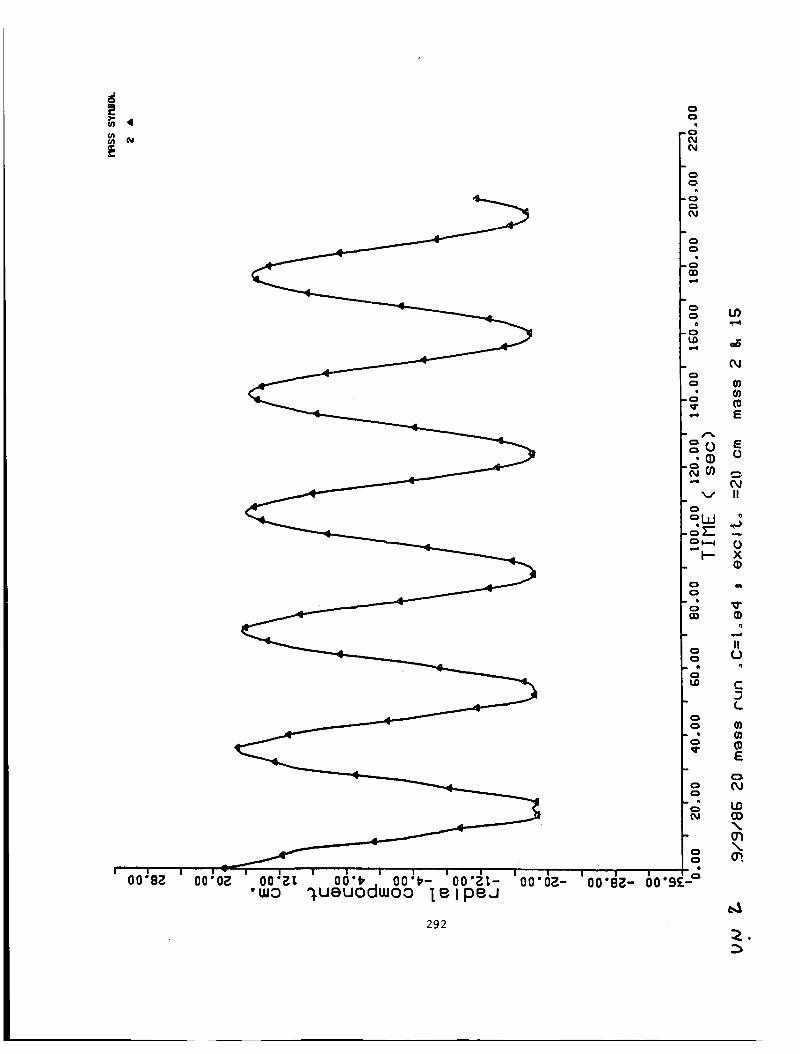
UlUl
EOJ
O0"8_ O0"OZ oo'_,, oo't,- oo'z_-"),ueuoawoo Ie I pe,J
292
-0
oJoJ
0
OJ
II
O0"9£ -_
t)
II0
i1
C
(_
O)O)
c_OJ
U3CO
O_\m.
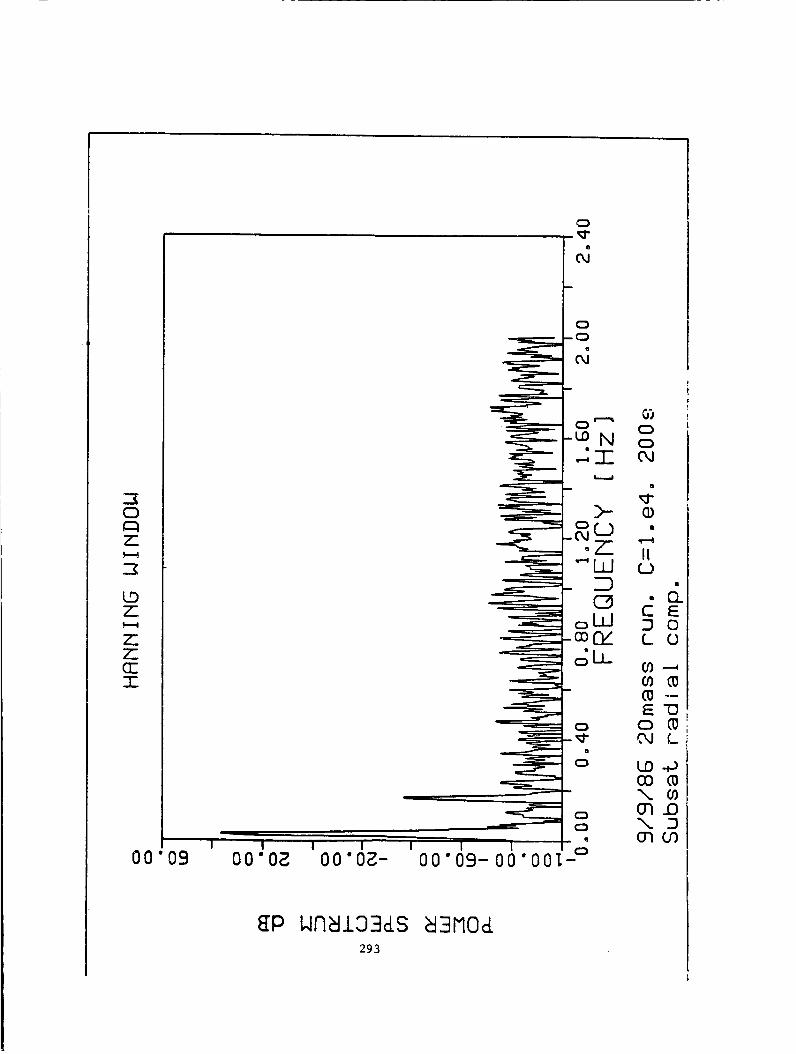
0
L97"k..-I
7"
(EI
00 09I T T
00"0_ 00"0_-
C_
N
a
O)
C3C_
el
(I)I
il(_)
II
• CLC ED 0L. 0
(I) 0
E'Oo •OJ L
L04-_CO 0
07.0
070'_
_IP WnWI331S _3M0_
293
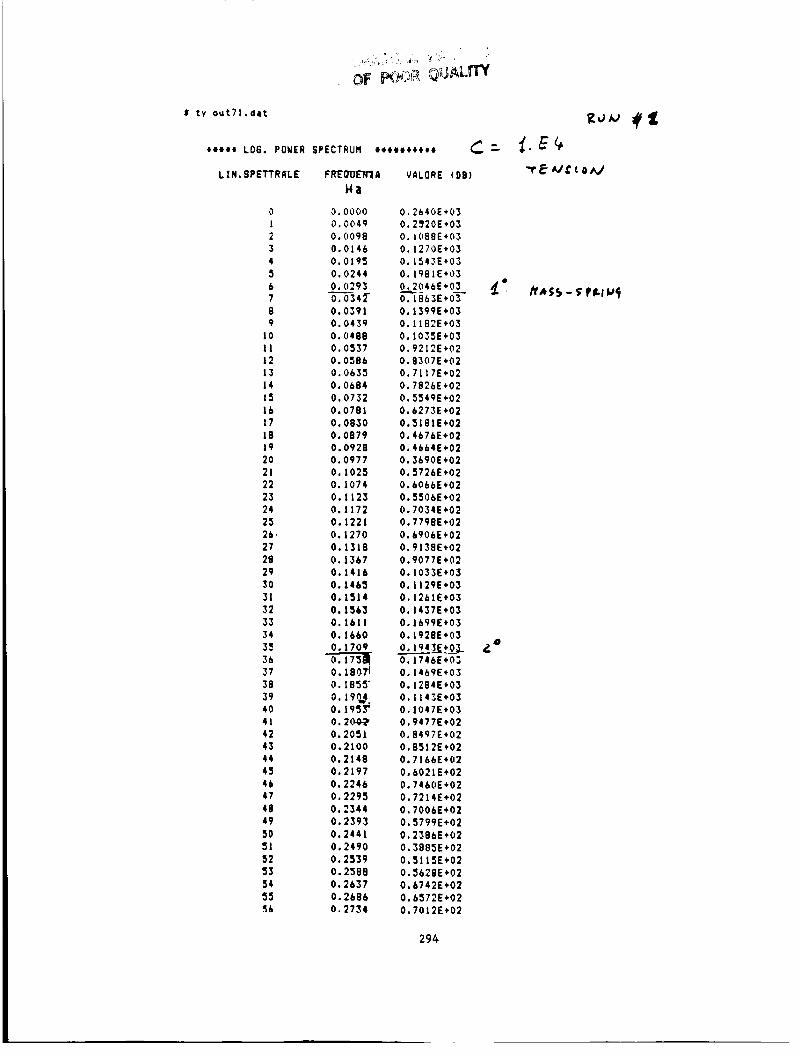
• ,
ty out71.dlt
oo**o LOB. POWER SPECTRUR
L I N. SPETTRRLE FREOUENIA
Ha
0 0,0000
1 0,0049
2 0. 0098
3 0.0146
4 0.0195
5 0.0244
6 O. 0293
7 "_"0"$ 42"
8 0.0391
9 0.0439
10 O. 0488
11 0.0537
12 0.0586
13 0.0635
14 O. 0684
15 0.0732
16 0.0781
17 0.0830
18 0.0879
19 0.0928
20 0.0977
21 O. 1025
22 O. 1074
23 O. 1123
24 0.1172
25 O. 1221
26. O. 1270
27 O. 1318
28 O. 1367
29 O. 1416
30 O. 1465
31 0.1514
32 O. 1563
33 O. 1611
34 O. 1660
3_- O. 17oe
37 O. 18074
38 O. 1855"
39 O. 190_,40 O. 1953"
41 O. 20_-_
42 0.2051
43 0.2100
44 0.2148
4_ 0.2197
46 O. 2246
47 O. 2295
48 Oo2344
49 0.2393
50 0.2441
51 0.2490
52 0.2539
53 O. 2588
54 0.2637
5_ O. 2686
._6 o. 2734
eteeetleie C
VRLORE (08)
0.2640E+03
0.2ff20E÷03
0.1088E*03
0.1270E*03
0.1543E*03
0.1981E+03
0.2046E+03......__ _ *0.1863E_03
0.1399E+03
0.1182E+03
0.1035E÷03
0.9212E+02
0.8307E+02
0.7117E_02
0.7826E+02
0.5549E+02
0.6273E÷02
0.5181E+02
0.4676E+02
0,4664E÷02
0.3690E+02
0.5726E÷02
0.6066E*02
0.5506E+02
0.7034E+02
0,7798E+02
0.6906E+02
0.9138E+02
0.9077E+02
0.I033E÷03
0.1129E+03
O.1261E+03
0.1437E÷03
0.1699E+03
0.1928E+03
o. 19.__J_to__.& o0,1746E+03
0.1469E+03
0.1284E*03
0.1143E÷03
0.1047E*03
0,9477E÷02
0.8497E+02
0,8512E*02
0.7166E+02
0.6021E÷02
0.7460E+02
0,7214E÷02
0.7006E+02
0.5799E+02
0.2386E+02
0.3885E+02
0.5115E+02
0,5628E+02
0.6742E÷02
0.6572E÷02
0,7012E*02
ff,_S5 - I; fILl U_
294

J
0
&
J
)
J
0
O'
t
0
0
J
575859
6061
626364
656667
68
6970
71
7273
7475
7677
7879
8081
8283
84
858687
88
8990
9192
9394
95
9697
9899
100
101102
I01104
105
106107
108109
110111
112113
114
115116
117118
119120
ORIGINAL
OF POOR
0.27B30.20320.29810,29300,29790.30270.30760.31250,31740.32230.3271
0.33200.33b90.34180.34670.35160.3564
0.36130.3662
0.37110.37600.38090,38570.39060.39550.40040.40530.41020.4150
0.41990.42480.42970.43460.43950.44430.44920.45410.45900.46390.46880.47360.47850.4834
0.49_0.99800.50290.50780,51270.51760.52250.52730.53220,53710.54200.54690.55180.55660.56150.56_40.57130.57620.58110.5959
fn^n
295
qUALITY
0.5607E+020.6274E*020,7209E+020.7753E*020.8_b2E*020,9255E*_20. I019E+03
0.1119E+030.1233E÷03
0.1336E+030.1398E+030.1383E_030.1297E÷030.1188E+030. I082E÷030.9812E÷02
0,BqSqE+020.7050E+020.8268E÷020.6825E÷020.7211E÷020.6364E÷020.5779E+020.6172E÷020.5810E÷020.2955E÷020.5_96E÷020,6391E÷020,4415E÷020.5656E+020.7105E+020.6572E÷020.7568E÷020.6009E÷020.7015E*020.7537E÷02O.BI73E÷020.8440E+020.8868E+020.9886E÷020,9845E+020.1055E÷030.1078E÷030.1087E+030.1070E÷Q30.1038E+030.t00tE÷03O.QSI2E+020.8794E÷020.8459E÷020.8158E+020.7248E+020,7630E÷020.7391E+020,5411E÷020.6524E÷020.5947E÷020.5804E÷020,3929E÷020.746BE÷020,6563E+020.7135E÷020,5954E+020.5907E÷02
o
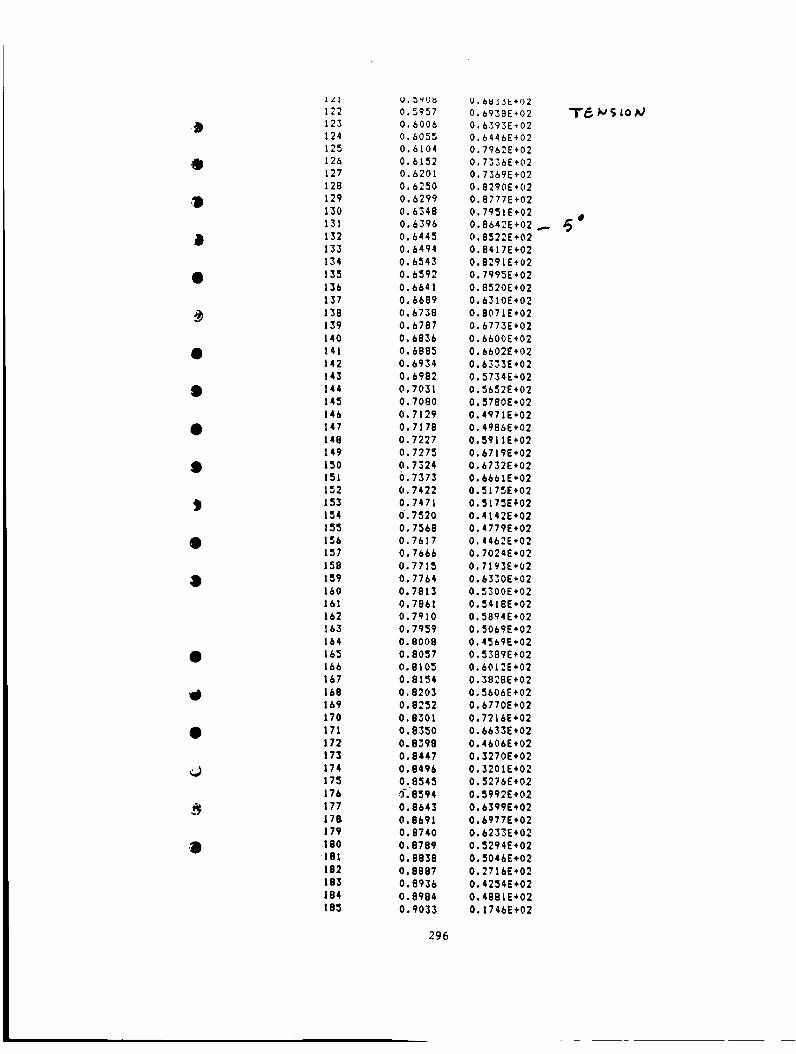
JD
0
0
0
t
9
®
0
0
,t
iz!
122
123
124
125
126
127
12B
129
130
ISI
132
IS3
134
135
136
137
139
139
140
141
142
143
144
14.5
146
147
t48
149
150
151
152
153
154
155
1.56
157
158
159
160
16!
!62
!63
164
165
166
167
168
16q
170
171
172
173
174
175
17b
177
17B,
179
180
181
182
183
184
185
U. 3_UU
0.5?57
0.6006
0.605_
0.6104
0.6152
0.6201
0.6250
0.6299
0.6348
0,6396
0.6445
0.6494
0.6543
0.6592
0.6641
0,6689
0.6738
0,6787
0,6836
0.6885
0.6934
0.69B2
0.7031
0.7080
0,7129
0.7178
0.7227
0.7275
0.7324
0.7373
0.7422
0.7471
0.7520
0.7568
0.7617
0.7666
0.7715
0.7764
0.7813
0.7861
0,7910
0.7959
0.8008
0.8057
0.8105
0.8154
0.8203
0,8252
0.8301
0.8350
0.8398
0.8447
0.8496
0_8545
_.8594
0.8643
0.8691
0,8740
O,B7Bq
0.8838
0,8887
0.8936
0.8984
0.9033
296
o.6u_jb÷o2
0.6938E+02
0,6393E+020 6446E+02
0 7962E+02
0 7336E+02
0 73698÷02
0 8290E+02
0 8777E+02
0 7951E+02
0 8642E+02
0.8522E÷02
0.8417E+02
0.8291E+02
0,7995E+02
O.B520E+02
0.6310E+02
0.8071E+02
0.6773E+02
0,6600E+02
0.66028+02
0.63_38+02
0.5734E+02
0.5652E+02
0.5780E+02
0.4971E+02
0,4986E+02
0.5911E+02
0.6719E+02
0,6732E+02
0,6661E÷02
0,5175E+02
0,5175E_02
0,4142E+02
0.4779E+02
0,4462E+02
0,7024E+02
0,71938÷02
0.b330E+02
0.53008+02
0.5418E+02
0.5894E*02
0.5069E÷02
0.4569E+02
0.5389E+02
0.6012E+02
0.3828E+02
0.5606E+02
0.6770E÷02
0,72168+02
0.6633E+02
0.4606E+02
0,3270E+02
0.3201E+02
0,5276E+02
0.5992E+02
0,6399E+02
0.6977E÷02
0.623_E÷02
0,.5294E+02
0.5046E÷02
0.2716E+02
0.4254E÷02
0.4881E+02
0.1746E÷02
.- 6
TE._gLo_

ir -,;,kj.--, :. •
OF POOR QUALITY
0
O
0
¢
0i
g
e*t_t LOG, PO_ER
LIN.SPETTRALE
01234S6789
1011]21314151617iS192021222324252627282930313233343536373B3940414243444546474S495051$2
53$4555657w_
SPECTRUM *t_e,o****
FREQUENZA VALORE (DB)
0.0000 -.48SHE+020.0049 -.8073E+02O,O0?B -.6447E+020.0146 -.3870E+020.0195 -.1373E+020.0244 0.303_E*020.02_3 0.3683E*020,0342 0.1860E*020.0391 -.2761E+020.0439 -.5204E+020,0488 -.56S6E+020,0537 -.8272E+020.0586 -.7025E*020,06_5 -.8186E*020.0684 -,7501E÷020.0732 -.8670E+020.0781 -.1000E*030.08_0 ".9258E+020.0879 -.IO00E+030.0928 -.9879E+020,0977 -,B472E*020.1025 -.8446E_020.1074 -.8436E÷020;1123 -.7976E+020.1172 -.7753E*020.1221 -.8612E÷020.1270 -.8866E÷020.1318 -.8566E+020,1367 -,1000E+030.1416 -.874lE÷020.1465 -.B661E+020.1514 -.IO00E+030.1563 ".810EE*020.1611 -.5741E+020.1660 -.3821E*020.1707 -.3701E+n2
-.5449E+02
0.1807 -,7146E+020.1855 -.8704E÷020.1904 -.BB67E+020.1953 -.9200E+020.2002 -.IO00E+030.2051 -.9790E÷020.2100 -.8143E_020.2148 -.BO59E+020.2197 -.8832E÷020.2246 -.BS52E+020.2295 -.7533E÷020._344 -.7615E+020.2393 -.833SE+020.2441 -.96S7E+020.2490 -.IO00E+030.2539 -.9682E+020.25BB -.9738E÷020.2637 ".B560E÷020,2686 -.8148E+020.2734 -.8144E_020.2783 -.8889E+02
_?.o
297
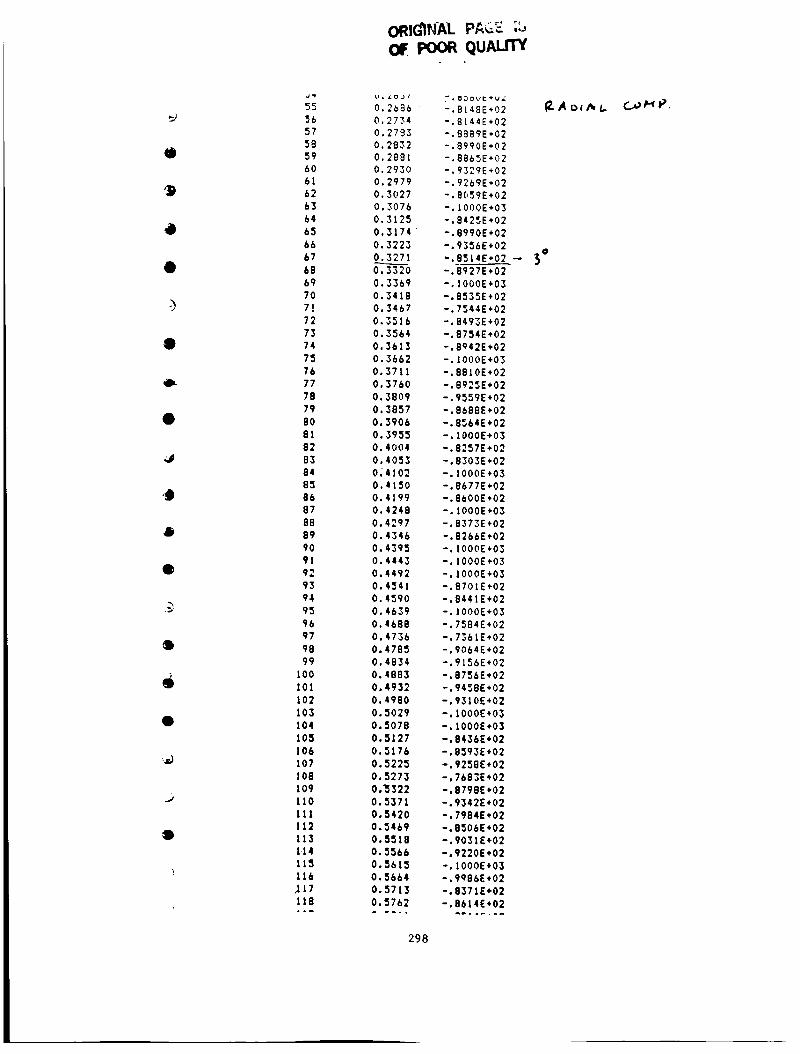
0
)
8
0
0
D
55
5b
57
58
59
60
61
62
63
64
65
66
67
68
69
7O
7!
72
73
74
75
76
77
78
79
EO
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
I01
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
J17
118
ORIG'INAL PA_ ;:o
POORQUALnX
O,268b
0.2734
0.2783
0.2832
0.2881
0.2930
0.2979
0.3027
0.3076
0.3125
0.3174
0.3223
0.327.____.10.3320
0.3369
0.3418
0.3467
0.3516
0.3564
0.3613
0.3662
0.3711
0,3760
0,3809
0,3857
0.3906
0.3955
0.4004
0.4053
0_4102
0.4150
0.4199
0.4248
0.4297
0.4346
0.4395
0.4443
0.4492
0.4541
0.4590
0,4639
0.4688
0.4736
0.4785
0.4834
0.4883
0.4932
0.4980
0.5029
0.5078
0.5127
0.5176
0.5225
0.5273
0._322
0.5371
0.5420
0.5469
0.5518
0.5566
0.5615
0.5664
0.5713
0.5762_. °
-.8148E+02
-.8144E+02
-.8889E+02
-.8990E+02
-.8865E÷02
-.9329E+02
-.9269E+02
-.B059E+02
°.I000E+03
-.8425E+02
-.8990E+02
-.9356E+02
-.8514E+02
-.8927E+02
-.1000E+03
-.8535E+02
-.7544E+02
-.8493E+02
-.8754E*02
-.8942E*02
-.I000E÷03
-.8810E+02
-.8925E+02
-.9559E+02
-.86888+02
-.8564E+02
-.1000E+03
-.8257E+02
-.8303E*02
-.I000E÷03
-.8677E+02
-.8600E÷02
-.1000E+03
-.8373E÷02
-.B266E÷02
-.1000E÷03
-.1000E*03
-.1000E+03
-.8701E÷02
-.8441E+02
-.1000E+03
-.7584E+02
-.7361E+02
-.9064E+02
-,9156E+02
-.8756E+02
-.9458E+02
-.9310E+02
-.1000E+03
-.1000E+03
-.8436E+02
-.8593E+02
-.9258E+02
-,7683E÷02
-.8798E÷02
-.9342E+02
°.7984E+02
-.8506E÷02
-.9031E÷02
-.9220E+02
-.1000E+03
-.9986E+02
-.8371E*02
-.8614E÷02
298
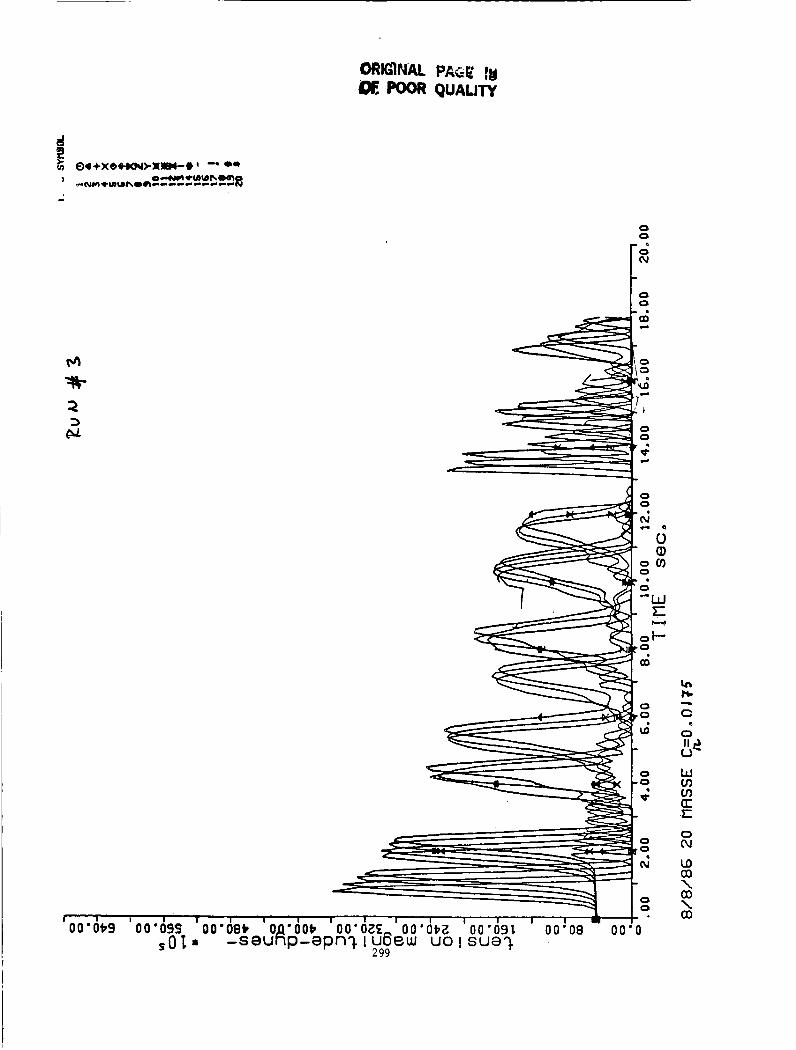
ORIGINAL PAC=P_ |ll
POOR QUALITY
eJ
O4+XO_KN)-X_IIB4--e q --" eQ
!o
o0 "0_9 0o "o9sgOT,"
oo'os_, o.o.-oot, oo'oz_, oo'ot,z oo'os[-seunp-epn_ 1uoew UO ! sue'_
299
00"08 00"0
c_
W
c_
\
\

.+
e_
0L
(3
2
P
P4C
I
00"08
oo
.(:D,q.OJ
oo
A
-0
O,J
00
1.0
C.)
'_W"r-
o
CO
oo
,¢
o0
, , 0_OOJog ' O0'Ot' ''00"0;_ O0 ;
,01,
ILUHOIZ313S I£Ua
300
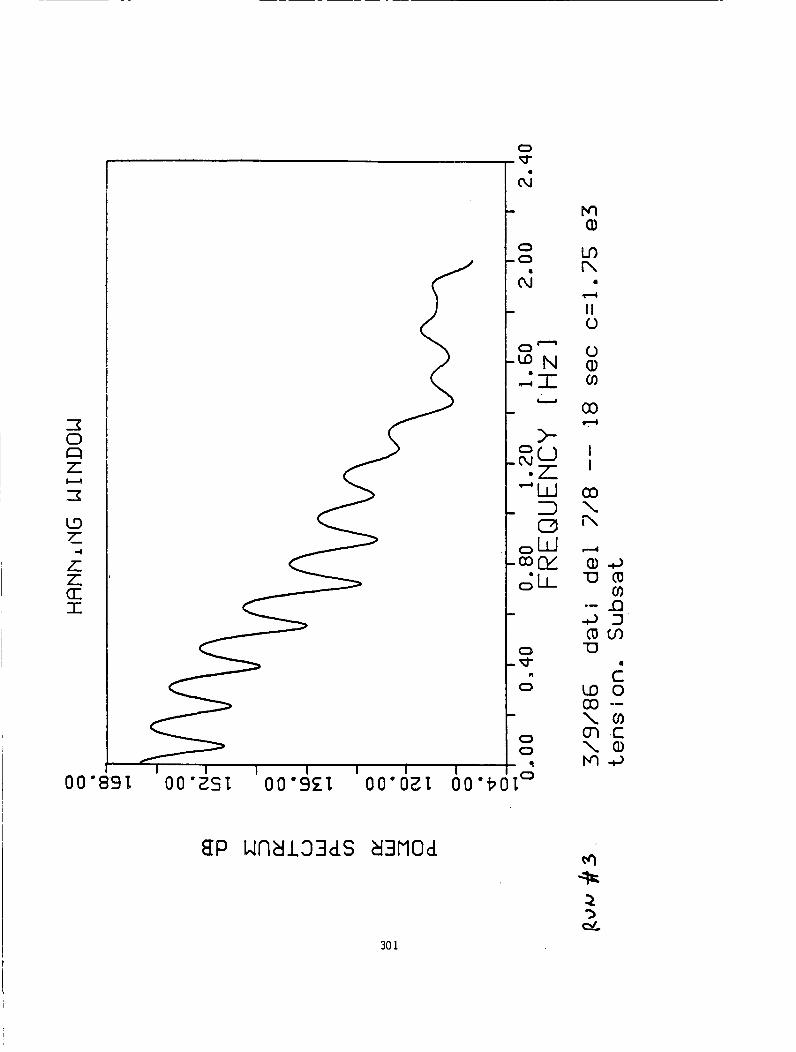
O
7-
IS
LD
-,4
7-7"(ET
00"89II I I I I I
00"gSl 00"9EI 00"0gi
E[P WN_133ES _3MOE
301

j-
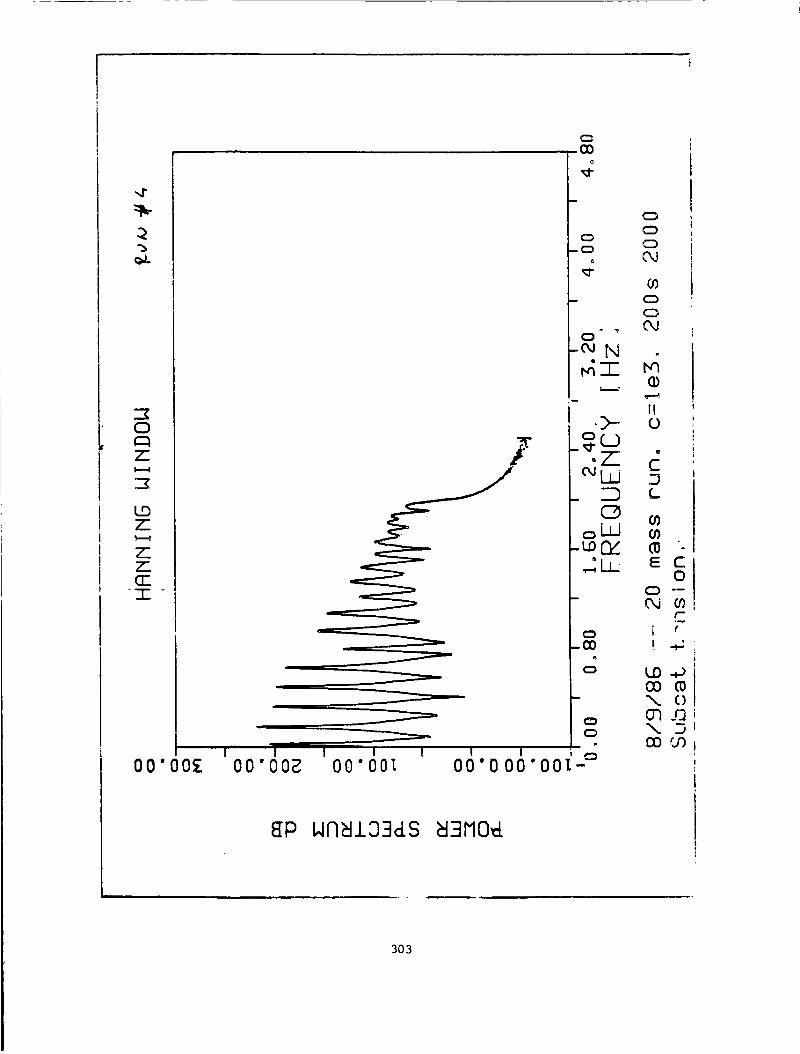
,4"
CDQ7"I,---4
L9
7-
zi7-LCIZ
00"00£ O0"OOE
c_CO
00"001
==.
o
CD
-OJ N
_T
.)-
00
0
II0
LiI
I
iJ
i
C
C_
(I)
E C0
(ki COr-
& rq ._c:
(?0 ol"X. ()0"1 _0 i"N..._ P(X) U')
8P WO_Z33dS _3MOd
303

O0"8_ 00"_ oo'z; oo'_,, oo't,- oo'zz-• _uo '_ueuoo_uoo "relpeu
304
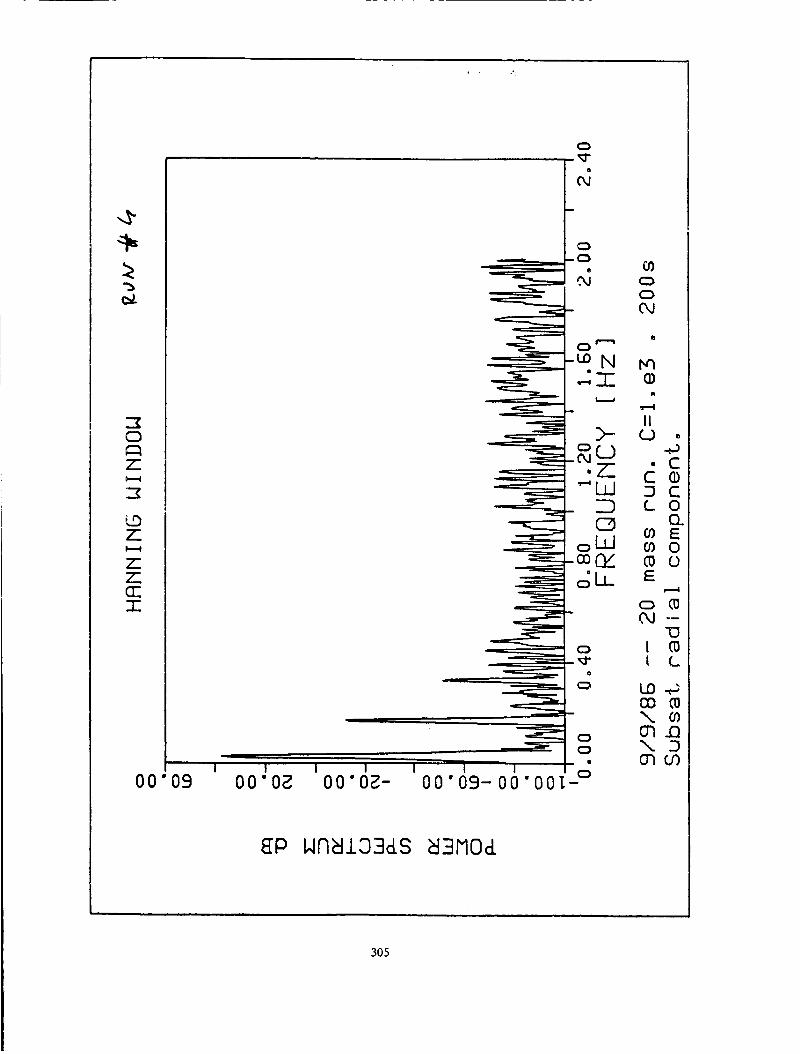
c_
_r
0
Z
LO7"
7"7"G_I
00"09
NI
O0"OE 00"0_-
0')
0
0,1
(D{m
IIC._ •
D CL 0
O_E
CO 0(0 0E
,-..&
o (0
"0I (0
LD-_CO (0\ CO0%.0\ DOltO
EIP WAWI331S W3MOI
305
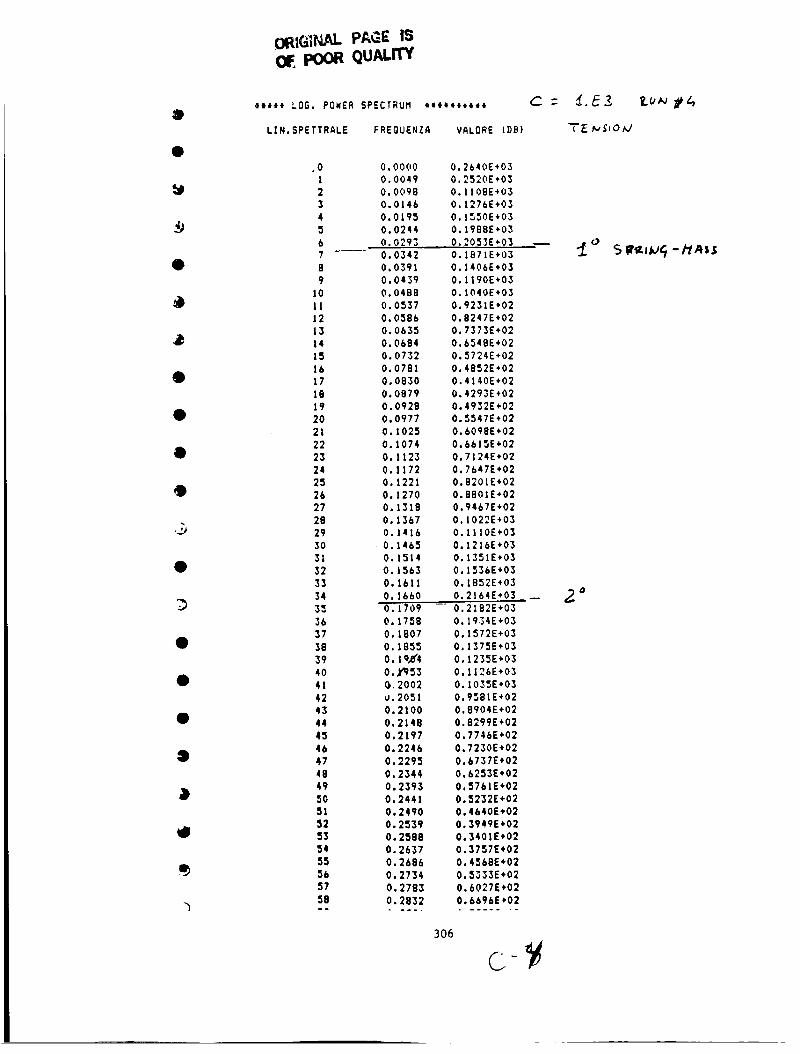
0
0
@
O
@
D
O_IG_J_- PAGE IS
OF poor QUALITY
_e*** LOG. PONER SPECTRUM **********
LIN.SPETTRALE FREQUENZA VALORE (DB)
.0 0.0000 0.2640E+03
1 0.0049 0.2520E+03
2 0.00?8 0.1108E*03
3 0.0146 0.1276E+03
4 0.0195 0.1550E+03
5 0.0244 0.1988E+03
6 0.0293 0.2053E+03
7 0.0342 0.1871E+03
B 0.0391 0.1406E+03
9 0.0439 0.1190E+03
10 0.0488 0.1040E+03
11 0.0537 0.9231E*02
12 0.0586 0.8247E+02
13 0.0635 0.7373E+02
14 0.0684 0.6548E+02
15 0.0732 0.5724E+02
16 0.0781 0.4852E+02
17 0.0830 0.4140E÷02
18 0.0879 0.4293E+02
19 0.0928 0.4932E+02
20 0.0977 0.5547E*02
21 0.1025 0.6098E+02
22 0.1074 0.6615E+02
23 0.1123 0.7124E÷02
24 0.1172 0.7647E+02
25 0.1221 0.8201E÷02
26 0,1270 0.8801E+02
27 0,1318 0.9467E+02
28 0.1367 0.1022E+03
29 0.1416 O.IIIOE+03
30 0.1465 0.1216E+03
31 0.1514 0.1351E+03
32 0.1563 0.1536E+03
33 0.1611 0.1852E+03
34 0.1660 0.2164E+03
35 0.1709 - 0.2182E+03
36 0.1758 0.1934E+03
37 0.1807 0.1572E+03
38 0.1855 0.1375E+03
39 0.1%_'4 0.1235E+03
40 O.JY_53 0.1126E+03
41 0.2002 0.I035E+03
42 u.2051 0.9581E+02
43 0.2100 0.8904E+02
44 0.2148 0.8299E*02
45 0.2197 0.7746E+02
46 0.2246 0.7230E*02
47 0.2295 0.6737E+02
4B 0.2344 0.6253E+02
49 0.2393 0.5761E÷02
50 0.2441 0.5232E+02
51 0.2490 0.4640E+02
52 0.2539 0.3949E+02
53 0.2588 0.3401E*02
54 0.2637 0.3757E*02
55 0.2686 0.4568E+02
56 0.2734 0.5333E+02
57 0.2783 0.6027E+02
58 0.2832 0.6676E_02
306
o
Z.c,N _/-.,
S Wz_w_ - H,_ss
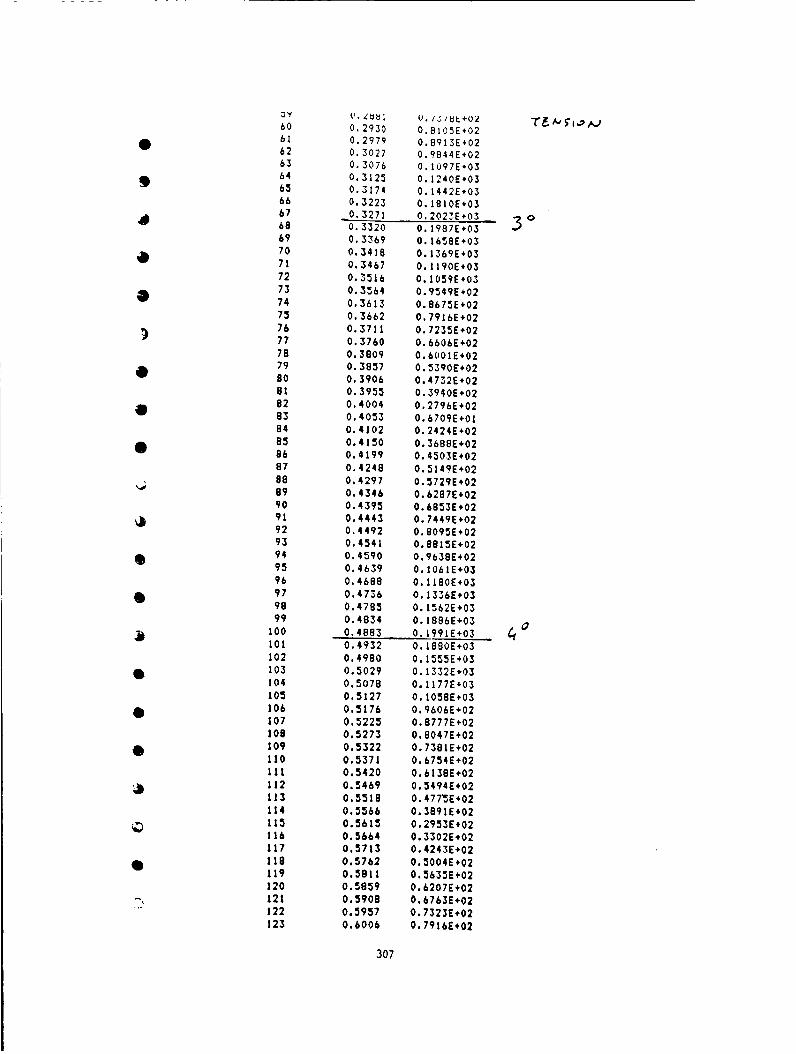
9
8
0
0
0
Q
Q
0
Q
_Y
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
7B
79
80
81
e2
83
84
B5
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
U. _dl
O. 2930
0.2979
O. 3027
O. 3076
0.3125
0.3174
0.3223
0.3271
0.8105E+020.8913E+02
0.9844E+02
0.I097E+03
0.1240E+03
0.1442E*03
0.1810E*03
0.202_E÷0_0.3320
0.3_69
0.3418
0,3467
0.3516
0.3564
0.3613
0.3662
0.3711
0,3760
0.3809
0.3857
0.3906
0.3955
0.4004
0.4053
0.4102
0.4150
0.4199
0.4248
0.4297
0,4346
0.4395
0.4443
0,4492
0,454[
0,4590
0.4639
0.4688
0,4736
0,4785
0.4834
0.4883
0.4932
0.4980
0.5029
0.5078
0,5127
0,5176
0.5225
0.5273
0.5322
0.5371
0.5420
0.5469
0.5518
0.5566
0.5615
0.5664
0.5713
0.5762
0.SBII
0.5859
0.5908
0._957
0.6006
0.1987E÷03
0.1658E+03
0.1369E+03
0.1190E+03
0.1059E+03
0.9549E+02
0.9675E+02
0.791bE+02
0.7235E+02
0.6606E+02
0.6001E+02
0.5390E+02
0.4732E+02
0.3940E+02
0.2796E+02
0.6709E+01
0.2424E+02
0.3688E+02
0.4503E+02
0.5149E+02
0.5729E+02
0.6287E+02
0.6853E+02
0.7449E+02
0.8095E÷02
0.SBI5E*02
0.9638E+02
0.1061E+03
0.1180E+03
0.1336E+03
0,1562E+03
0.1886E+03
0.1991E+03
0.1880E+03
0.1555E+03
0.1332E+03
0.1177E+03
0. I058E+03
0.9606E+02
0.8777E+02
0.8047E+02
0.73BIE+02
0.6754E+02
0.6138E+02
0.5494E+02
0.477_E+02
0.389IE+02
0.2953E+02
0.3302E÷02
0.4243E+02
0.5004E÷02
0.5635E+02
0.6207E+02
0.6763E+02
0.7323E+02
0.7916E+02
307
o
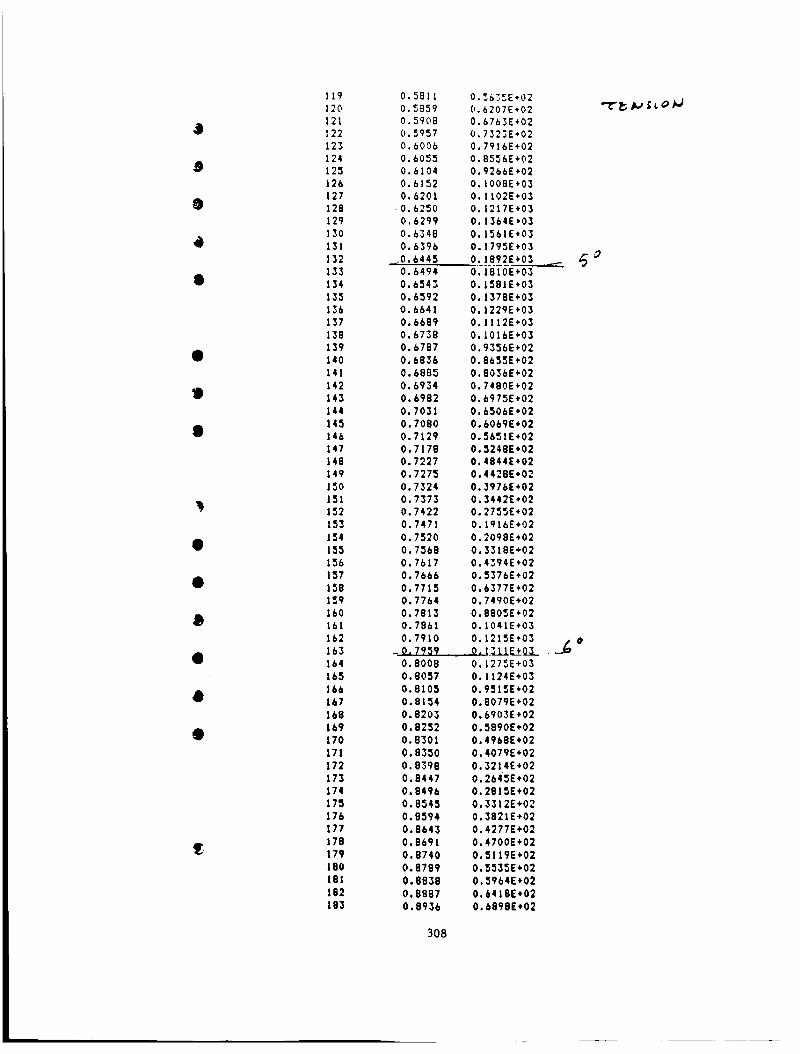
8
@
l
I
0
®
I19
120121
122123124
125126127
128129
130131
132133
134135
136137
138139
140
141142
143144
145146
147148
149150
151152
153154
155156
157158
159160
161162
163164
165
166167
168169
170171
172
173174
175176177
178179
IBO
181182
183
0.5811
0.58590.59080.5957
0.60060.6055
0.61040.6152
0.6201.0.6250
0.62990.63480.6396
_0.64450.64940.65430.65920.664!0.66890.67380.67870.68360.68850.69340.69820,7031
0.70800.71290.71790.72270.72750.7324
0.73730.74220.74710.7520
0.75680.76170.76660.77150.77640,78130.78610.7910
-0.7959O.BO08
0.80570.8105
0.81540.82030.8252
0.83010.83500.8398
0.84470.84?60.85450.95940.86430.86910.87400.87890.88380.88970.8936
308
O. 56.',5E÷02O. 6207E÷02O. 6763E+020.7323E÷02O. 7916E÷020.8556E÷020.9266E*02O. 1008E+03O. 1102E÷03O. 1217E*03O. 1364E_'03O. 1561E*03O. 1795E*03O. 1892E÷03
, r'-O. 1810E÷03O. 1581E÷03O. 1378E+03O. 1229E+030.1112E*03O. I016E÷03
0.9356E÷020.8655E÷020.8036E+020.7480E+020.6975E+020.6506E*020.6069E+020.5651E÷020.5248E÷02O. 4844E÷020.4428E÷020.3976E*02O. 3442E*02O. 2755E*02O. 1916E÷02O. 2098E*020.3318E+02O. 4394E'020.537bE÷020.6377E÷020.7490E÷020.8905E÷02
O. 1041E÷03O. 1215E+03 0O. t _d,lF.__O_,I_ ---_O. 1275E+03O. 1124E+030.9515E÷020.8079E+020.6903E÷020.5890E÷020.4968E÷020.4079E÷020.3214E÷020.26_5E+020.2915E÷020.3312E+020.3821E+020.4277E÷020.4700E+020.5119E+020.5535E÷020.5964E+020.641BE÷020.689BE÷02
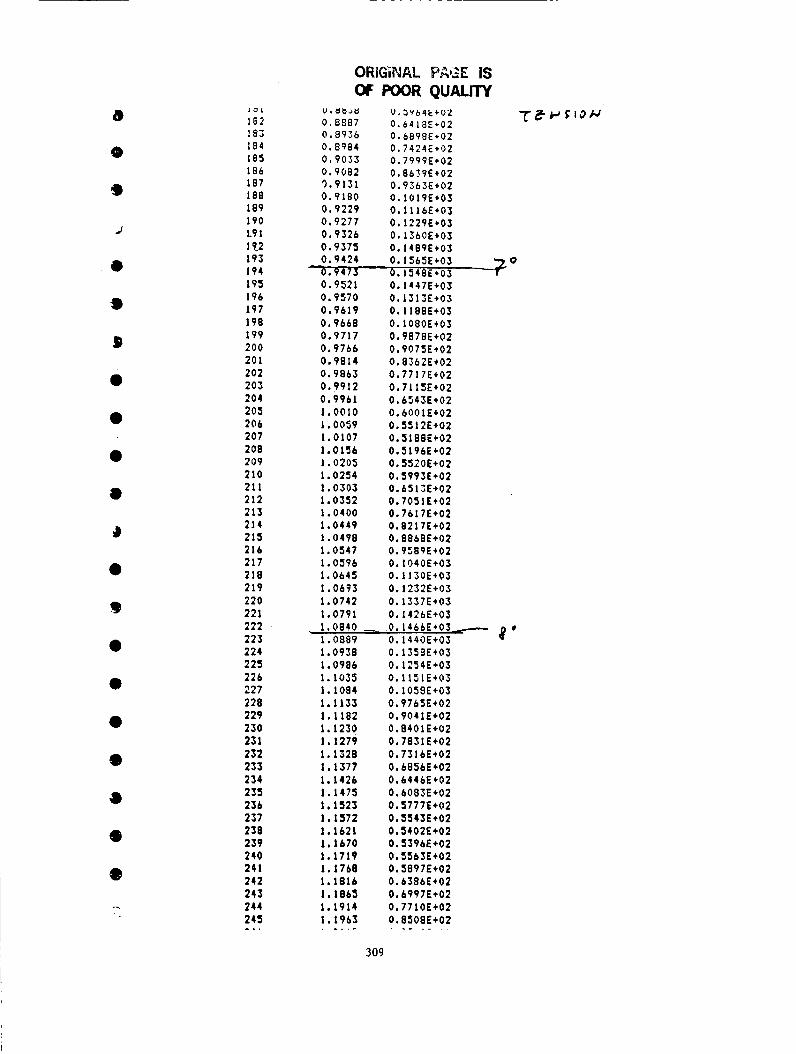
0
g
0
D
O
0
O
0
0
0
182
183184185186187
188189
190
1.91
19.2193194
195196
197198
199
200201
202203
204205
206207
208209
210211
212213
214215216
217218
219
220
221222
223224
225226
227
228229
230231
232
233
234235
236237
23B
239240241
242243
244245...
p_ORiGiNAL P_,=E IS
OF POOR QUALITY
0.8887 0.6418E+020,893b O,6BgBE+02
0.8984 0.7424E+020,9033 0.7999E+020.9082 0.8639E+029,9131 0.9363E÷02
0,9180 0.1019E÷030,9229 0.1116E÷03
0,9277 0,1229E÷030,9326 0.1360E+03
0.9375 0,1489E÷03
0.9424 0.1565E÷03 _70---0.9473 0.154BE÷030.9521 0.1447E+030.9570 0.1313E÷030.9619 0. IIBBE+030.9668 0. I080E÷030,9717 0.987BE÷020.9766 0.9075E+020.9814 0,8362E_020.9863 0.7717E+020.9912 0.7115E÷020.9961 0.6543E+021,0010 0.6001E+021,0059 0.5512E÷021,0107 0.5188E+021,0156 0.5196E÷021.0205 0,5520E+021.0254 0.5993E+021.0303 0.6513E+021,0352 0,7051E+021,0400 0.7617E÷02
1.0449 0.B217E÷021.0498 0.8868E+021.0547 0.9589E÷021.0596 0,1040E÷031,0645 0.1130E+031.0693 0.1232E÷031.0742 0.1337E+031,0791 0.1426E÷03
• 1.0840 __ 0.1466E+03_...------O •1.0889 0.1440E+031,0938 0.135BE+031,09B6 0,1254E÷03
1.1035 0,1151E+03
1,1084 0.1058E÷031.1133 0.9765E+021.1182 0.9041E+021.1230 O.B401E+021.1279 0.7831E+021.1328 0.7316E+021.1377 0.6856E÷021.1426 0.6446E÷021.1475 0.6083E+021.1523 0.5777E+021.1572 0.5543E÷021,1621 0.5402E+021,1670 0.5396E÷021.1719 0.5563E÷021.1768 0.5897E+021.1916 0.6386E÷021,1865 0.6997E+021.1914 0.7710E+021.1963 0.8508E+02
309
0
0
0
,0
0
G
0
b
1
0
0
0
0
247
248249
250:51
252253254
255256
25725S
259260
261262
263264
265266
2672682b?
270271
272273
274
27527b
277278
279
280281
292283
2B4285
286287
288
289290
291292
293
294295
296297298
299300
301302
303304
305306
307
308
,_0931094e
I 2031
1.21091.2158
N
V,7.'OO¢'V_
0.1023E*030.1097E÷03
0.11_8E÷031.2207
1.225b1.2305
1.23541.2402
1.24511.25001.2549
1.25981.26461.26951.2744
1.27931.28421.28911.2939
1.29881.30371.3086
1.31351.3184
1.32321.3281
1.3330
1.33791,34281.34771.35251.35741.36231.36721.3721
1.37701.3818
1.38671.39161.3965
1.40141.4063
1.4111
1.41601.4209
1.42581.43071.43551.44041.44531.45021.4551
J .46001,464B1,46971,47461.4795
1.48441.4893
1.4941
1.49901.5039
1.50991.5137
esne
0.1132E*030.1081E*030.I003E*030.9160E+02O.B314E*020.7541E+020.6860E+02O.b293E*020.SBaOE+020.5594E÷020.5505E÷020.5582E÷020.5782E+020.6071E+020.6428E+020.6B39E÷020.7301E+020.7BI2E÷02O.B373E+02O.B9B7E+020.9651E+020.1035E+030.1106E+030.1170E+030.1216E+03
- O,|_2E÷O_0.1214E÷030.1166E÷030,1102E÷030.1032E÷030.gb35E+02O.B990E+02O,B4OOE÷020.7874E÷020,7417E÷020.7045E÷020.6789E÷020.6681E*020.6740E+020.6954E+020.7290E+020.7712E+020.8200E+02O.B739E+020.9315E+020.9902E+020.1046E÷030.1092E+030. II19E÷03
0.1122E+03O.IIOOE÷03
0.1057E÷03O. IO01E+030.9399E+020.8772E+020,8153E+020,7549E+020,694BE÷020.6329E÷020,565BE+020.4968E÷02
310
41t°
ORIGINAL PAGE ISOF POOR QUALITY
***** AMPLITUDE SPECTRUM **********
LIN.SPETTRALE FREQUENZA VALORE
0
0
O
0
0 0.0000
1 0.0049
2 0.0098
3 0.0146
4 0.0195
5 0,0244
6 0.0293
7 0.0342
g 0.0391
9 0.0439
10 0.0488
11 0.0537
12 0.0586
13 0.0635
14 0,0684
15 0.0732
16 0.0701
17 0.0830
18 0.0879
19 0.0928
20 0.0977
21 0.1025
22 0.1074
23 0.1123
24 0.1172
25 0.1221
26 0.1270
27 0.1318
28 0.1367
29 0.1416
30 0.1465
31 0.1514
32 0.1563
33 0.1611
_4 0.1660
35 0.1709
36 _.1758
37 0.1807
30 0.1855
39 0.1904
40 0.1953
41 0.2002
42 0.2051
43 0.2100
44 0.2148
45 0.2197
46 0.2246
47 0.2295
46 0.2344
49 0.2393
50 0.2441
51 0.2490
52 0.2539
53 0.2588
54 0.2637
55 0.26B6
56 0.2734
57 0.2783
5B 0.2832
0.5740E-01
0.2439E-01
0.7062E-01
0.1936E*00
0.9735E+00
0.1200E÷02
_,1744E+02
0.6IOIE÷OI
0.4246E_00
0, I132E*00
0.6377E-01
0.8520E-02
0,273BE-01
0.9887E-02
O.125gE-OI
0.9037E-02
0.1457E-01
0.1610E-01
0.3068E-02
0.5413E-02
0.3958E-02
0.7972E-02
0.1531E-01
0.1574E-01
0,1037E-01
0.1278E-01
0.6441E-02
0.2168E-02
0.1328E-01
0.1904E-01
0.7523E-02
0.4397E-02
0.2385E-01
0.1486E+00
0,9056E÷00"
O. IO04E+OI
0.2330E+00
0.3624E-01
0=1547E-01
0,5231E-02
0.1361E-01
0.2062E-02
0,7295E-02
0.4307E-02
0.1046E-01
0.1249E-01
0,2016E-0!
0.2197E-010,1643E-01
0.4621E-02
O. I060E-OI
0.71_2E-02
O.9859E-02
0.8347E-02
0.1271E-01
0.1510E-01
0.7488E-02
0.2681E-01
0.1601E-01
0,1 Z °
311
o
J
O
Q
@
62_364656667_e6970717273747576777879BO81B283848586878889?0?192
949596979B';9
100101102103104105106107108109110111112113114115116117118119120121122123124
0.3027 0 8216E-020.3C)76 0.2211E-01
0.3125 0.7347E-020.3174 0.1217E-010.3223 0.2920E-01
o.3271 o._o_se+oo O 30.3320 0.8715E-01 •0.336_ 0.311_e-0130.341e 0.7_2_E-020._4_7 0.1:eSE-Ol0._I_ 0.7284E-020.3564 O. IO70E-OI0.3613 0.2274E-010.3662 0.2571E-010.3711 0.1527E-01
0.3760 0.9731E-020.3809 0.5012E-02
0.3857 0.I084E-010.3906 0.3625E-01
0.3955 0.2667E-010.4004 0.1599E-02
0.4053 0.1246E-010.4102 0,8206E-02
0.4150 0.5890E-020.4199 0.2320E-010.4248 0.1690E-010.4297 0.1017E-020.4_46 0.9560E-020.4395 0.1368E-010.4443 0.2617E-010.4492 0.391_E-010.4541 0.2382E-010.4590 0.575_E-020.4639 0.6221E-020.4688 0.1353E*01
0.4736 0.1670E-01 ,_j_j_oo.4"--_§5' 0.1Sl;E-O't--"
0.4034 0.3486E-OL0.4003 0.2604E-Or0.4932 o. zeOSE-OZ0.4980 O. IIOIE-OI0,5029 0.1406E-01o,5o7e 0.1384E-010.5127 0.1718E-010.517_ 0.1521E-010.52'25 0.7684E-020,5273 0.1455E-01g.5322 0.1678E-010.5371 0.6516E-020.5420 0.1335E-01
0.5469 0._325E-020.5510 0.1449E-010.5566 0,2014E-010.5615 0.2011E-010.5664 0.1225E-010.5713 0.1145E-010.5762 0.1556E-010,5811 0.6703E-020.5859 0.9616E-020.5908 0.9919E-020.5957 0._327E-020.6006 0.9681E-020.605_ 0.6503E-030.6104 0.1298E-01
312
ORIGINALOF POOR QUALITY
O
@
O
0
t
O
O.
D
0
@
0
B
125
126
127
128
129
15o131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
7J Cancel •
v.wvv_
0.b055
0,6104
0.6152
0.6201
0.6250
0.6299
0.6348
0.6396
0.6445
0.6494
0.6543
0.6592
0.6641
0.6689
0.6738
0.6787
0.6836
0.6885
0.6934
0.69B2
0.7031
0,7080
0.7129
0.7178
0.7227
0.7275
0.7324
0.7373
0.7422
0.7471
0.7520
0.7568
0.7617
0.7666
0.7715
O.7764
0.7813
0.7861
0.7910
0.7959
0,8008
0.9057
0.8105
0,8154
O.92qT
0.82_2
0,8301
_,8350
0.8398
0.8447
0.8496
0.8545
0.8594
0.8643
0.8691
0.8740
0.8789
0.b503E-03
0.12989-01
0.1978E-01
0.1940E-01
0.3077£-O2
0.7190E'02
0.84646-02
0.1_916-01
0.79199-02
0.6410E-02
0.10439-01
0.13826-01
0.1182E-01
0.6834E-02
0.1420E-01
0.1842E-01
0.9449E-02
0.4677E-02
0.7512E-02
0.1247E-01
0.1966E-01
0.87066-02
0.3272E-02
0.16289-01
0.1383E-01
0.41616-02
0.7833E-02
0.17959-01
0.7262E-02
0.2390E-02
0.29329-02
0.8188E-02
0.7918E-02
0,14429-01
0,6509E-02
0.19686-01
0.1183E-01
0.3446E-02
0.36986-02
0,36129-02
0,42019-02
0,1160E-01
0,1460E-01
0.7758E-02
0.11976-01
0.15656-01
0.71389-02
0.30549-02
0.1484E-01
0,2574E-01
0.1780E-01
0.84419-02
0.80669-02
0.7842E-02
0.12239-01
0.20939-01
0.2161E°01
3L3

N87-18824
Rigorous Approaches to Tether Dynamics in Deployment and Retrieval
Ettore Antona
University of Torino, Italy
PRIEC:EDING pAGE BLANK Nor FILMED
315
ETTORE ANTONA
DIPARTIMENTO DI INGEGNERIA AERONAUTICA
E SPAZIALE DEL POLITECNICO DI TORINO
RIGOROUS APPROACHES TO TETHER
DYNAMICS IN DEPLOYMENT
AND RETRIEVAL
AIAA - NASA - PSN - FIRST INTERNATIONAL
CONFERENCE ON TETHER IN SPACE
Arlington, VIRGINIA - September 1986
PRECEDtT_G pAGE BLANK NOT FILMED
317
ABSTRACT
Dynamics of Tethers in a linearized analysis can be
considered as the superposition of propagating waves.
This approach permits to have a new way for the analysis
of a Tether behaviour during deployment and retrival,
were a Tether can be considered composed by a part at
rest and a part sujected to propagation fenomena, being
the separating section depending on time.
The dependence on time of the separating section
requires the analysis of the reflection of the waves
travelling toward the part at rest. Such a reflection
generates a reflected wave, whose characteristics are
determined.
The propagation fenomena of major intest in a Tether are
transverse waves and longitudinal waves, all
mathematically modelled by the "vibrating chord"
equations, if the tension is considered constant along
the Tether itself. An interesting problem also
considered is concerned with the dependence of the
Tether tension from the longitudinal position, due to
microgravity, and the influence of this dependence on
propagation waves.
318
INTRODUCTION
Dynamics of Tethers('), as well as of any structure, in a linearized
analysis can be considered as the superposition of propagating waves.
This requires the study of dynamic propagation along the Tether with
the appropriate boundary conditions. During deployment and retrieval,
with reference to a lagrangian reference system("), Tether can be
considered as composed of two parts - one at the rest and one subjected
to the propagation phenomena. These two parts are separated by a
section that changes with time, i.e. the Tether section that bounds the
part constrained to rest is changing with time (the other part being
free to move and vibrate and having the opposite end section subjected
to the boundary conditions imposed by the satellite).
The propagation phenomena of major interest from a practical point of
view are the following.
i) Transverse waves, mainly a "vibrating chord" behaviour, where
inertial forces and the tension in the Tether - in combination with
its local curvature - are the most important elements of the
dynamic equilibrium.
2) Longitudinal waves, mathematically modelled by the "vibrating chord"
equation, where inertial forces and longitudinal internal forces,
due to elastic deformations, are the most important elements of the
dynamic equilibrium.
The dependence on time of the section which bounds the part at rest
requires the analysis of the reflection of the wave travelling toward
the part at rest. Such a reflection generates a wave travelling
outward, whose characteristics are to be determined.
The A. had previously considered from a theoretical point of view such
problem in particular in order to analyze the behaviour of deployable
booms subjected to longitudinal and flexural dynamic phenomena (see
(i), (2), (3) and (4)). Also in the case of the problems concerning a
structure like the Tether, the theoretical analysis gives rigorous
solutions and permit an insight into experimentally observed effects,
(') It can be suggested Ref. (8) for a general presentation of Tether
concept and its (dynamic) problems.
(") A reference system which introduces a bi-univocal correspondence
between a longitudinal coordinate and each Tether section.
319
that by some authors were erroneously thought to be "continuous"
changes of frequencies and amplitudes of the proper modes.
This paper belongs to a series of works having the scope of opening a
new way in the approach by means of mathematical models of several
mechanical problems of deployable systems of telescopic and Tether
type.
Recently several attempts have been made to solve the problem of the
telescopic structures behaviour. Such attempts are mainly based in
changes of the coordinates in order to take into account the changes
during the time of the space where the problem is defined.
As a matter of fact these attempts don't seem obtain good results. They
don't take into account energetic balances.
On the contrary this work introduces and developes to some extent the
basic idea of considering each dynamic motion in a structure as the
results of wave propagation , taking also into account energetic
exchanges at the ends.
In the case of vibrating chord the problem of the time dependence of
the definition space can't be resolved by means of the Cauchy, Goursat
and Darboux results, (5). These results deal with the problems of time
dependinE location of the sections where are imposed the boundary
conditions. In the part that is external to such sections dynamic
phenomena take place that are coherent with phenomena acting in the
internal part and contribute to supply or spillover energy in it.
This work deals with the request of having external parts at the rest
(not only the boundary sections). Therefore boundary sections have the
behaviour of surface where internal dynamic phenomena "reflect".
Obviously reference is made to a constant section unaxial structure, as
Tether can be considered. Longitudinal tension loads due to
microgravity permits to consider additive small tension or compression
loads without critical phenomena.
320

FUNDAMENTAL EQUATIONS
Let us have first a brief recall of concepts, with reference only to
the case of longitudinal waves making use of Ref. (i). The reader can
easily do the extension to transverse waves. The problem can be
analyzed by means of an equilibrium and a continuity equations.
If _:_%_) is the stress at point :_ and time _ and _ :_C_)is
the velocity of the motion, the equilibrium linearized equation is
l) = _ .
The continuity linearized equation on the other hand is
2) __ = _ _ __ o
_ E Qr
we put ¢ z _/_/If= . ) operating we obtain
i') -- -- __
9, wz ¢,.- _)tz.
The general solutions of eq.s i') and 2') are
4) +- -C /
Eqs. 3) and 4) indicate that the motion of the bar is composed of two
waves: one travelling in the increasing x direction and another
travelling in the decreasing x direction.
On the base of these considerations it is possible to obtain a relation
between p and u of each travelling wave.
321
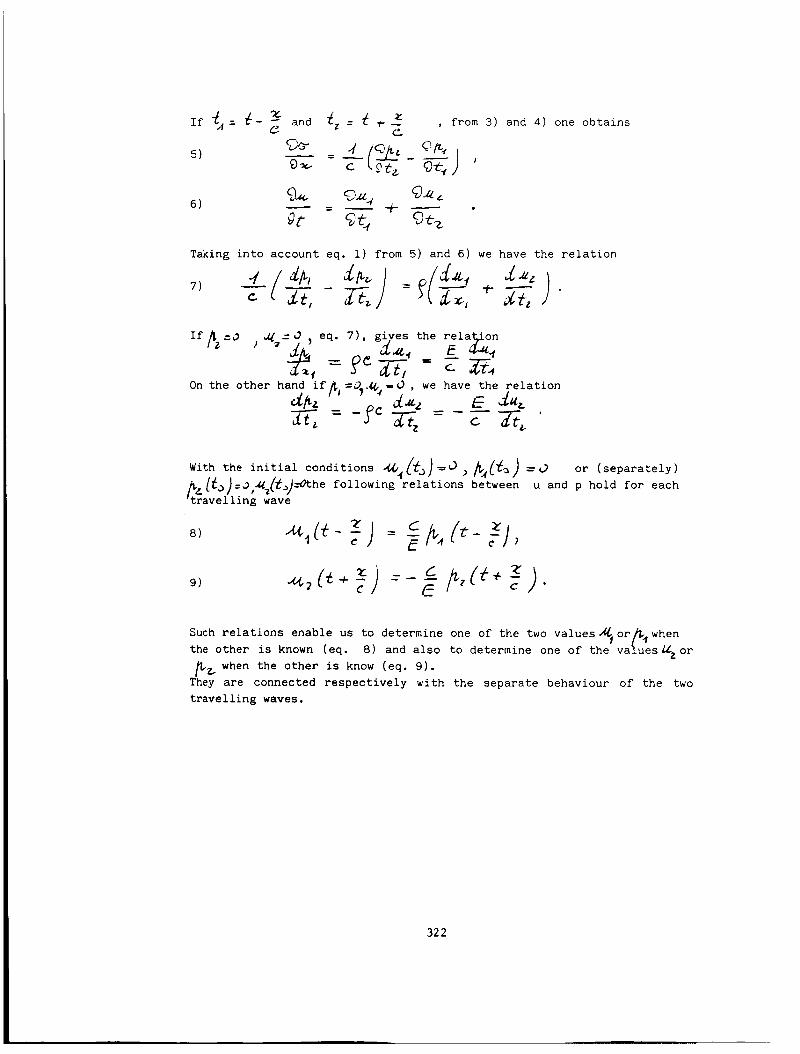
¢
5)
6)
and _z = _ w --_ , from 3) and 4) one obtainsC
9G- x f_._5 <';_f<"
_t 9t_ 9t_
Taking into account eq. l) from 5) and 6) we have the relation
If A=_ )_=0 , eq. 7), giyes the rela_on
On the other hand if_,=O_._6+-O , we have the relation
fc
With the initial conditions 4.d_4_]_):0
t__l_O):O %_>J--_the following relations betweentravelling wave
) --.i_t_,) =0 or (separately)
u and p hold for each
: k,
) ,_/'-9) _ (_+ __ c (t+z C '
Such relations enable us to determine one of the two values_or_when
the other is known (eq. 8) and also to determine one of the values_zor
_ when the other is know (eq. 9).
They are connected respectively with the separate behaviour of the two
travelling waves.
322
REFLECTIONONTHETIMEDEPENDENTSECTION
Also in this paragraphlongitudinal wavesare consideredas a sampleproblem,still makinguseof Ref (i). Theextension to transversewaveiseasy. In practical applications the boundaryconditions that are usuallyconsideredfor uniaxial extensionalbars are free edge( _=O ) and fixed
edge (_O). At the edge where deployment is done, it is (_)=O, where
_(.a=X_t) is the time dependent section that can be considered as fixed
and_14_=% r is the velocity of displacement of the constraint. Here
_ is an abscissa on the indeformed bar.
As a first analysis of the behaviour at a time dependent fixed section we
can consider the problem of an extensional bar having a free edge at 9o=O
and constrained with _)=o _T 7_c=_+61]" _ where _, U" are
constant. The bar is subjected in _=O to an external extensional
specific force _4 indipendent of the time_.
Such force produces a wave travelling in the direction of the increasing
when such wave reaches the moving constraint section _ a
reflected wave of specific force _z is generated that runs in the
direction of the decreasing x.
We will now determine the characteristic of the reflected wave, before it
reaches the section :_O
In order to determine the reflected wave by means of an energy balance is
necessary to dispose of an evaluation of the energy exchanged at the
constrained end. A discussion on this subject is performed in ref. (I).
The conclusion is that the constraint has and energy exchange different
from zero e that the reflected wave can be determined by means of a
behavioural analysis like the following.
During the time we have the already introduced displacement of the
section where the constraint is imposed. Such displacement corresponds to
the internal deformation of the rod.
The interval _'_=_'_d_,during _, withstands a length change _l=-_x_,,_J_-
with a strain _ = _6/_.
On the otherE hand the final stress in _- ./ must be E= _+_ :
=_._) _, that means a strain 6 = _,-_,.I _/C
323
Equating the two expressions of the strain gives
i0) "_Z -- - _4
This result I0) coincides with that of the application of the Goursat
Darboux and Cauchy problem solution,(5), with the condition.M=o at_=_.
In spite of the observed coincidence with the well known results of the
vibrating chord analysis, the proposed model presents the advantage of
the applicability to more complex problems as dispersive systems, (see
for instance (6) and (3)).
324

EXTENSION TO TIME DEPENDENT AMPLITUDE (OF THE TRAVELLING WAVE) AND SPEED
(OF THE BO_ARY CONDITION)
Let us consider in a non dispersive system the wave v&¢ 4 travelling
inward the time variable restraint and the _4_ z. travelling outward
expanded as follows, (see also (2)),
If at a time %_ the restraint condition is
a_ at the time tt_t where 4/" will tends to zero,
without loss in generality we can put _I_-0 and introduce a dummy
variable _ such that #_ _ <t6_.
During _ at the section _4 the displacement
take place. During the same _- in the region _>0 the internal
deformation generates a change in length
The equation between such two _ } substituting 14) and taking into
account only the terms of the lower order for respect to the principal
_" , operating gives)
or
Relation 14) means that, beside the higher order terms,
like in the case of_ andi¢_ of constant value.
325
EXTENSIONTOPROPAGATIONSPEEDDEPENDINGONTHELONGITUDINALPOSITION
Thepresent paragraphconcernsthe extensionof the analysis to the casewhereeq. I') and2') becomeas follows
X")-- )
- 'This case includes the dynamics of transverse waves in Tethers where
longitudinal load is depending on the position due to microgravity.
Because c_) is not constant but a function ofgK t C_ =_z)) expressions
3) and 4) are not still valid, and it is necessary to find an appropriate
way of solution.
The A. in a previous paper, (7) here largely recalled, proposed that the
general solution of eq.s I") were composed by means of two waves in
opposite directions travelling and having speed depending on x. Such
waves reduce to eq.s 3) and 4) when _(z_reduce to a constant C. If_
indicates _ or_. as necessary, the following expression was adopted (')
where _ is an arbitrary constraint and --__ _ C_XJ could be the
propagation speed at 2f.. /
Obviously, not all the functions _4and _&are usefull to satisfy_ i"). Thei
problem is now reduced to the determination of the functions _4 and _zgif
any, that can satisfy l").
The functions _4 and _& can be examined separately.
Q¢, _ i4 L, _ )
('-_When _C)--const. and _--4 , the proposed expression reduces to 3)
and 4),
326

Recalling now i") we obtain
The function _4 ' if it there exists, must satisfy eq. 16). To the same
conclusion we lead if we consider C_>.7&
As an application we can now restrict to the case
We have _) -- CO andC= Co_d.
This is a linear ordinary seconc_ order equation.I L
Its solution is of the form(_x_and preciselyiT --
If we consider dZ we obtain also
In the previous analysis _ is an arbitrary constant. If we let _ assume
all the values 0'---_---_ _ we obtain _as _ and _complete sets of
functions, which allow us to expande by integral whatever function. Each
dynamic fenomenum in, a structure where eq.s i") are valid and C= _o
can be analysed as, (see 17} and 17')),
_D
327
Obviously 18) is not the only way by which to expand by integral such a
dynamic fenomenum, but this way allows us to consider component functions
when the propagation speed at any x is well know. Such speed, as we know,
is a fundamental datum in order to evaluate the speed of a reflected
wave, in particular in the case of time depending restraint conditions.
328
REFERENCES
{1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
E. ANTONA : Dynamic problems in eleastic systems with time
variable restraints. Accademia delle Scienze Di
Torino, 1985.
E. ANTONA : Further results on time variable restraints in one
dimensional non dispersive systems.
(To be Published).
E. ANTONA : Dynamic problems on time variable restraints in
dispersive systems. (To be Published).
E. PERSICO : Introduzione alla fisica matematica, Redatta da
Tino Zeuli, para. i17, Ed. Zanichelli, Bologna 1948.
L. AMERIO : Analisi matematica, Cap. 4, para. ii, Ed. UTET,
Torino, 1982;
E. ANTONA : Sopra due propblemi di preparazione di onde
elestatiche. L'Aerotecnica - Missili e spazio n ° 2 -
1975
E. ANTONA : Dinamica dei sistemi unidimensionali con condizioni
di vincolo dipendenti dal tempo. Atti del Congresso
AIMETA, Torino futtembrich 1986.
J.A. CARROLL : Guidebook for analysis of Tether applications Final
Report on Contract RH4-394049 with the Martin
Marietta Corporation, March 1985.
329
III
WORKSHOP SUMMARY
AND
PANEL DISCUSSION RESULTS
P_ECED_NG PAGE B1.ANK NOT FILMED
331

SUMMARY OF THE SEPTEMBER 16
TETHER DYNAMICS SIMULATION WORKSHOP
Charles C. Rupp
George C. Marshall Space Flight Center
The objective of the Tether Dynamics Simu-
lation Workshop is to provide a forum to
discuss the structure and status of existing
computer programs which are used to simulate
the dynamics of a variety of tether appli-
cations. The reasons for having differentsimulation models and how the simulations are
verified is discussed. Recommendations made
during a panel discussion regarding the dir-
ection of future work are presented.
INTRODUCTION
This summary was prepared by a Tether Dynamics Simulation
Review Committee consisting of the following members:
Peter M. Bainum
William A. Baracat
Silvio Bergamaschi
Paul A. Penzo
Charles C. Rupp
American Astronautical Society/Howard
University
General Research Corporation
University of Padova, Italy
Jet Propulsion Laboratory
George C. Marshall Space Flight Center
The workshop featured presentations on eleven simulation
models and special presentations on the validation of the
Tethered Satellite System Engineering Simulation at the
Johnson Space Center and the dynamics flight experiments to
be conducted on the first flight of the Tethered Satellite
System. A panel composed of preselected workshop participants
discussed five issues regarding future simulation validation
activities. Approximately 120 people participated in the
workshop.
RECOMMENDED FUTURE SIMULATION DEVELOPMENT
Comments that were received during the presentations of the
simulation models are summarized as follows:
I. Incorporate sensor hardware and observer measurement
dynamics.
333
PRECEDING PAGE B_..._'_K NOT FILMED
2. Improve simulation of tether transient thermodynamic
effects such as rapid heating and cooling duringterminator crossing.
3. Resolve different approaches to atmospheric dragmodels.
4. More experimental information is required on tether
material damping and thermoelastic effects.
5. Simplify simulations where possible.
PANEL DISCUSSION TOPICS
Five topics were selected for the panel discussion with the
intent of provoking opposing viewpoints. However, little
disagreement was found among the panel members and the mem-
bers of the audience who participated. These topics, the
names of the panel members leading the discussion, and theconclusions follow.
TOPIC i:
Howard Flanders
Henry WolfMartin Marietta Denver Aerospace
Analytical Mechanics Associates
Should a universal simulation program be developed?
a. General consensus is no.
b. Desirable in theory, but not practical at thistime.
c. A universal program will be difficult to verify,
costly to maintain, not likely to be widely andreadily accepted.
d. There may not exist such a program--various
applications may require their own "best" program.
e. A library of special purpose application programsor subroutines might be useful.
f. These programs should be mini or micro-computer
usable, well documented, and user-friendly.
g. An alternative to a universal program development
would be better documentation and use of existingprograms.
TOPIC 2:
David A. Arnold Smithsonian Astrophysical Observatory
Silvio Bergamaschi University of Padova, Italy
What accuracy is required in tether dynamics simulations?
a. The simulation model should be selected based on
the mission goals and the mission phase.
334
b. The influence of various factors should be studiedindividually to determine the magnitude of theireffect.
c. Effects should be included in the simulationaccording to their influence on the particularproblem.
d. Accuracy verification of the selected simulationshould be madewith a sample case of the completesimulation, and comparison of results with anindependent program.
e. Results depend not only on the accuracy of thecomputer algorithms, but on the accuracy of thephysical parameters.
TOPIC 3:
Joe CarrollCharles C. Rupp
Energy Science LaboratoryGeorge C. Marshall Space Flight Center
What methods should be used to verify simulations?
a. Mathematical confirmation can be used to computesimple cases whose results are known, compare withother simulation programs, and provide a self-teston the level of accuracy.
b. Physical confirmation tests can be performed in alaboratory to determine tether physical character-istics, perform dynamics and control system tests,and test tether motion in a large vacuumchamber.The KC-135 can provide zero-G tests of tethers andsystem components.
TOPIC4:
Enrico LorenziniPaul A. Penzo
Smithsonian Astrophysical ObservatoryJet Propulsion Laboratory
Whoshould be responsible for simulation verification?
a. The sponsoring agency should ultimately beresponsible for verification.
b. Possible options for the verification effortinclude in-house, unbiased third party, and/ora formal professional committee (e.g. AIAA-AASconnected).
c. The methodology should include providingsufficient updated documentation for each modeland establishing, case by case, a set of testruns.
335

TOPIC 5:
Peter M. Bainum
Bill Djinis
American Astronautical Society/HowardUniversityNASAHeadquarters
Should a peer process be established? How?
a. Numeroussimulation programs have been developedunder various contracts.
b. The complexity and accuracy required of simulat-ions will depend on use (preliminary design,particular phase of mission support, experimentalflight dynamics verification, future applicat-ions).
c. Small new projects may not be able to afforddevelopment of their own simulations and couldbenefit from a group of expert peers.
d. The panel recommendsformation of a working groupto study peer selection, availability, andfinancial support.
RECOMMENDATIONS
The final recommendations of the workshop are as follows:
i. Establish a joint tether applications working groupwith the following objectives:
a. Serve as a focal point for dynamics studies fortether applications.
b. Advocate simulation validation.c. Maintain a simulation capabilities catalog.d. Perform periodic reviews of dynamics issues.e. Provide recommendations to managementon resource
requirements.
2. Pursue ground and flight dynamics experimentation.
336

APPENDIX A
WORKSHOP AGENDA
337
7:45
8:15
TETHER DYNAMICS SIMULATION WORKSHOP
Tuesday, 16 September 1986
PROGRAM
Registration/Continental Breakfast
Introduction
Chris Rupp
NASA Marshall Space Flight Center
William A. Baracat
General Research Corporation
8:30
9:00
9:30
10:15
10:45
11:20
11:40
12:00
Simulation Descriptions
Tether Dynamics Simulation
Vinod J. Modi
University of British Columbia, Canada
Arun K. Misra
McGill University, Canada
HIFITS Simulation
Howard Flanders
Martin Marietta Denver Aerospace
Tethered Satellite System on the Systems Engineering Simulator
Ron Humble
Lockheed Missiles and Space Company
David Harshman
Rockwell Space Operations Company
GTOSS
David D. Lang
David D. Lang Associates
Tethered Satellites Simulation
John R. Glaese
Control Dynamics Company
Skyhook Program
David A. Arnold
Smlthsonian Astrophysical Observatory
Slack3
Gordon E. Gullahorn
Smithsonlan Astrophysical Observatory
Artificial Gravity Laboratory
Enrico Lorenzlnl
Smithsonian Astrophysical Observatory
12:20 Lunch/Computer Simulation Demonstrations
339
PRECEDIt_G PAGE BLANK NOT FILME_
PM
1:30
2:00
2:45
3:15
3:30
4:00
5:30
6:00
Simulation Descriptions - Continued
Elasticity Effects in Tether Dynamics
Silvio Bergamaschi
University of Padova, Italy
TSS Subsatellite Attitude Dynamics and Control Laws
Verification Programs
Floriano Venditti
Aeritalia Space Systems Group, Italy
Validation of TSS Engineering Simulation
Zachary Galaboff
NASA Marshall Space Flight Center
TSS-1 Dynamics Flight Experiments
Gordon E. Gullahorn
Smithsonian Astrophysical Observatory
Tether Simulation Design for Mission Planning and Analysis
Richard Deppisch
NASA Johnson Space Center
Yashvant Jani
LinCom Corporation
Panel Discussion on Future Validation Activities
Topic I: Howard Flanders, Henry Wolf: Should a single
universal simulation program on tether dynamics bebuilt?
Topic 2: Dave Arnold, Silvio Bergamaschi: How accurately must
simulations be able to compute tether system
dynamics?
Topic 3: Joe Carroll, Chris Rupp: What verification methods
should be employed?
Topic 4: Enrico Lorinzini, Paul Penzo: Who should be
responsible for simulation verification?
Topic 5: Peter Bainum, Bill Djinis: Should a peer process beestablished?
Adjournment
Executive Committee Meeting - Report to be presented FridayI0:00.
340

APPENDIX B
WORKSHOP ATTENDEES
341
Randall S. Aadland
NASA Lewis Research Center
NASA-CASE Co-op Student
21000 Brookpark Road
Cleveland, OH 44135
(216) 433-6134
Adrian Abraham
Bethesda-Chevy Chase Space Experiment ClubClub Leader
6406 Stratford Road
Chevy Chase, MD 20815(301) 654-0127
Dale T. Adams
Texas A&M University
Military Aerospace AssociationPO Box 6500
College Station, TX 77844
(409) 260-7140
Charles Alexander
Energy Science LabsPO Box 85608
San Diego, CA 92138-5608
(619) 455-4688
Norman Alexander
General Electric Space Div.
PO Box 8555 Bldg. I!
Philadelphia, PA 19101
(215) 962-2123
Kyle T. Alfrlend
General Research Corporation
7655 Old Springhouse Road
McLean, VA 22102
(703) 893-5900
Marc Allen
Computer Technology Associates
11847 Canon Blvd., Suite 3
Newport News, VA 23606
(804) 873-2021
Sean Allen
Field Box 183
Wapello, lowa 52653
343
P_E_ING pAGE BLANK NOT FILMED
John L. Anderson
NASA Headquarters
Office of Aeronautics and Space Technology
Mail Code RS
Washington, DC 20546
(202) 453-2756
Ettore Antona
Polltecnico Di Torino
Dipartimento Ingegneria Aerospaziale
Corso Duca degll Abruzzi, 24
10146 Torino, Italy
39-11-5566807
David A. Arnold
Smithsonlan Astrophysical Observatory
60 Garden Street
Mail Stop 59
Cambridge, MA 02138
(617) 495-7269
Wayne L. Bailey
Teledyne Brown Engineering
300 Sparkman Drive
MS 52
Huntsville, AL 35807
(205) 532-2829
Peter M. Balnum
Howard University
Department of Mechanical Engineering
Washington, DC 20059
(202) 636-6612
William Baracat
General Research Corporation
Aerospace Group
7655 Old Springhouse Road
McLean, VA 22102
(703) 893-5900
Ivan Bekey
NASA Headquarters
Director, Advanced Programs
Code MT
Washington, DC 20546
(202) 453-1147
Silvlo Bergamaschl
University of Padua
Institute of Applied Mechanics
Via Venezla 1
35131 Padua, Italy
39-49-8071033
344
Gianfranco Bevilacqua
Aeritalia
Space Systems GroupCorso Marche 41
10146 Torlno, Italy
39-11-725089
Giannandrea Bianchini
University of PaduaVia Venezla 1
35131 Padua, Italy
39-49-20198
Karen D. Blumentrltt
Rockwell International
1840 NASA Road One
Houston, TX 77058
(713) 483-2627
Andrew E. Boeck
6558 Idlewild Road
Apartment E
Charlotte, NC 28212
(504) 242-0714
Alexander Boschitsch
Princeton University
Dept. of Mechanical Engineering
D-209 Eng. Quadrangle
Princeton, NJ 08544
(609) 452-5674
Edward J. Brazill
NASA Headquarters
Code MTS
Washington, DC 20546
(202) 453-1155
Cyrus L. BurnerGeneral Research Corporation
Aerospace Group
7655 Old Springhouse Road
McLean, VA 22102
(703) 893-5900
Michael A. Calabrese
NASA HeadquartersCode EED
Washington, DC 20546
(202) 453-1676
345
Nellie N. CartNASAJohnsonSpaceCenterASTFlight SystemsOperationsCodeDH64Houston,TX 77058(713) 483-4966
JosephA. CarrollEnergyScienceLabsPOBox85608SanDiego, CA 92138-5608(619) 455-4688
Brian F. Class
Fairchild Space Company
Senior Engineer, ACS Section
2031 Century Blvd.
Germantown, MD 20874
(301) 428-6245
Mario Cosmo
Smithsonian Astrophysical Observatory60 Garden Street
Cambridge, MA 02138
(617) 495-7433
Capt. Carl E. CrockettUnited States Air Force
Air Force Space Command/DOA
HQ Space CommandPeterson AFB
Colorado Sprlngs, CO 80914
(303) 554-2851
Eric Dahlstrom
7630 Tomlinson Avenue
No. 35
Cabin John, MD 20818
(301) 229-6599
Richard M. Deppisch
NASA Johnson Space Center
Mission Planning and Analysis
Houston, TX 77058
(713) 483-4457
Lamont DiBiasl
Fairchild Space Company
Dlrector, NASA Business Development
20301 Century Boulevard
Germantown, MD 20874-1181
(301) 428-6363
346
William Djinis
NASA HeadquartersCode MTF
Washington, DC 20546
(202) 453-1157
Charles R. Eastwood
NASA Headquarters
Code EED
Washington, DC 20546
(202) 453-1723
Pamela Edwards
AIAA
1633 Broadway
New York, NY 10019
(212) 408-9778
Marinella Ercoli
PSN/CNR
Viale Regina Margherlta 202
00198 Roma, Italy
39-6-8445107
Ruying Fan
Howard University
Dept. of Mechanical Engineering
Washington, DC 20059
(202) 636-7124
Joseph V. Fedor
NASA Goddard Space Flight Center
Code 712
Greenbelt, MD 20771
(301) 286-2088
Mr. Festa
Aeritalia
Space Systems Group
Corso Marche 41
10146 Torino
Italy39-11-333271
Howard Flanders
Martin Marietta Denver Aerospace
Mall Stop $8071PO Box 179
Denver, CO 80201
(303) 977-5951
347
KevinFlanneryGeneralElectric RSL3129ChestnutSt.Room5450MPhiladelphia, PA 19101(215) 823-3759
ThomasW.FlatleyNASAGoddardSpaceFlight CenterCode712Greenbelt,MD 20771(301) 286-5336
ZacharyJ. GalaboffNASAMarshallSpaceFlight CenterCodeEDI3MarshallSpaceFlight Center,AL 35812(205) 544-1446
MarcoGalantlnoPSN/CNR
Viale Regina Margherita 202
00198 Roma, Italy39-6-4767249
William H. Ganoe
University of Arizona
S.I.E. Department
Tucson, AZ 85721(602) 621-6562
James Gearhart
777 West Middlefleld Road
#134
Mountain View, CA 94043
(408) 742-8085
Mireille Gerard
AIAA
Administrator, Corporate and
International Programs
1633 Broadway
New York, NY 10019
(212) 408-9770
Francesco Giani
Aeritalia
Space Systems GroupCorso Marche 41
10146 Torino, Italy39-11-3332235/721345
348
JohnR. GlaeseControl DynamicsCompanyOffice ParkSouthSuite 304600BoulevardSouthHuntsville, AL35802(205) 882-2650
RonGlickmanBall AerospaceP.O. Box1062Boulder,CO80306(303) 939-4275
Filippo GrazianiUniversita Di RomaAssociateProfessorVia Lariana 5
Roma 00199
Italy
39-6-858333
Luciano Guerriero
PSN/CNR
Viale Regina Margherita 202
00198 Roma, Italy39-6-4767249
Gordon E. Gullahorn
Smithsonlan Astrophysical Observatory
Mall Stop 59
60 Garden Street
Cambridge, MA 02138
(617) 495-7419
Kevin Hames
University of Michigan
5594 Northcote
West Bloomfield, MI 48011
(313) 626-0509
Calvin D. Herr
Martin Marietta Denver Aerospace
7775 S. Trenton Ct.
Englewood, CO 80112(303) 977-5451
James K. Harrison
NASA Marshall Space Flight Center
Mail Code PS04
Marshall Space Flight Center, AL 35812
(205) 544-0629
349
Dave Harshman
Rockwell Space Operations Co.600 Gemini Avenue
Houston, TX 77058
(713) 282-2789
William S. Hayes
McDonnell Douglas Astronautics14651 Mimosa Lane
Tustln, CA 92680
(714) 896-1338
Xiaohua He
Stanford University
Aeronautics/Astronautics Dept.
Stanford, CA 94305
(415) 725-3297
Gall Helm
System Planning Corporation1500 Wilson Blvd.
Suite 1202
Arlington, VA 22209
(703) 841-2880
Ronald W. Humble
Lockheed Engineering & Management ServicesMail Code BI2
2400 NASA Road I
Houston, TX_ 77058
(713) 333-6285
Paul Ibanez
ANCO Engineers, Inc.
9937 Jefferson Blvd.
Culver City, CA 90232-3591(213) 204-5050
Rodlca lonasescu
Jet Propulsion Laboratory4800 Oak Grove Drive
Pasadena, CA 91109
(818) 354-0445
Yashvant Jani
LinCom Corporation
18100 Upper Bay RoadSuite 208
Houston, TK 77058
350
Philip O. JarvinenMassachusettsInstitute of Technology244WoodStreet, Rm.D-382Lexington,MA 02173(617) 863-5500
FrancisJ. KellyNavalResearchLaboratorySectionHead,LongWaveRadio4555OverlookAvenueWashington,DC20375(202) 767-2941/(202)767-2891
JosephC. KolecklNASAHeadquartersCodeMTSWashington,DC 20546(202) 453-1881
MeredithC. Kurz4101LongfellowStreetHyattsville, MD 20781(301) 277-5682
DavidD. LangDavidD. LangAssociates222270th Avenue,SEMercerIsland, WA98040(206) 236-2579
JamesR. LeaseNASAHeadquartersCodeMSDWashington,DC 20546(202) 453-1576
JohnF. L. LeeHoneywellInc.Mail Station 809-513350U.S.Highway19, SouthClearwater,FL 33546(813) 539-5667
Carolina Leonard
Adroit Systems
809 N. Royal Street
Alexandria, VA 22314
(703) 684-2900
Sue Leszkiewlcz
NASA Goddard Space Flight Center
Code 554.1
Greenbelt, MD 20771
(301) 286-3155
351

AlejandroLeviANCOEngineers,Inc.9937Jefferson Blvd.CulverCity, CA 90232-3591(213)204-5050
JohnLewakBristol AerospacePOBox874WinnipegR3C2S4Canada(204) 775-8331
Lin LiangdongHowardUniversity2225NStreet, NWApartment404Washington,DC 20037(202) 636-7124
EnricoC. LorenziniSmithsonianAstrophysical ObservatoryMail Stop5960GardenStreetCambridge,MA02138(617) 495-7211
AndreaLorenzoniPSN/CNRViale ReginaMargherita20200198Roma,Italy39-6-4767259
CharlesA. LundquistUniversity of Alabamain HuntsvilleResearchInstituteDirector of Research/CMDSRoomM-65Huntsville, AL 35899(205) 895-6620
GianfrancoManariniPSN/CNRViale ReginaMargherita20200198Roma,Italy39-6-4767249
Chris A. Markland
European Space Agency2200 AG
NoordwijkThe Netherlands
31-17198655
352
Pietro MerlinaAeritaliaSpaceSystemsGroupCorsoMarche4110146TorinoItaly39-11-3332356
Paul A. MillerRCAAstro-Electronics DivisionPOBox800Princeton, NJ 08543(609) 426-3857
William MillerAeritallaSpaceSystemsGroupCorsoMarche4110146Torino, Italy39-11-725089
ArunK. MisraMcGill UniversityDepartmentof MechanicalEngineering817 SherbrookeStreet, W.Montreal, Quebec,CanadaH3A2K6(514) 392-5480
AntonioMocclaIstituto di GasdinamicaUniversita dl NapoliPie Tecchio8008125Napoli, Italy39-81-7682158
VinodJ. ModiUniversity of British ColumbiaDepartmentof MechanicalEngineering2324MainMallVancouver,B.C.CanadaV6TIW5(604) 228-2914
DeanS. MonitorMartin Marietta AerospaceMichoudOperationsDept. 3514P.O. Box29304NewOrleans,LA 70189(504) 255-2092
353
MariaB. MontiniPSN/CNRViale ReginaMargherita, 20200198Roma,Italy39-6-4767261
ClaudeNicollierNASAJohnsonSpaceCenterESAOffice CodeCBHouston,TX 77058(713) 483-4513
JohnOldsonEnergyScienceLaboratoriesPOBox85608SanDiego,CA 92138-5608(619) 455-4688
MichaelPattersonNASALewisResearchCenterMall Stop500-22021000BrookparkRoadCleveland,OH44135(216) 433-2405
JessA. PedrenaAcademyof AeronauticsLaGuardiaAirport530E. 20th StreetNewYork, NY 10009(212) 254-6536
Paul A. PenzoJet PropulsionLaboratoryMall Code301-170U4800OakGroveDrivePasadena,CA91109(818) 354-6162
J. DavidPowellStanfordUniversityDepartmentof Aeronauticsand
AstronauticsDurandBuildingStanford, CA94305(415) 723-3425
ChristopherR. PurvisJet PropulsionLaboratoryMail Code156-2464800OakGroveDrivePasadena,CA91109(818) 354-4986
354
TerrenceG. ReeseGeneralResearchCorporationDirector, AerospaceGroup7655Old SpringhouseRoadMcLean,VA22102(703) 893-5900
CharlesC. RuppNASAMarshall SpaceFlight CenterMail CodePS04MarshallSpaceFlight Center,AL35812(205) 544-0627
Cal RybakBall Aerospace
P.O. Box 1062
Boulder, CO 80306
(303) 939-5462
Jean SabbaghPSN/CNR
Viale Regina Margherlta 202
00198 Roma, Italy39-6-4767247
Lester Sackett
Charles Stark Draper Laboratory, Inc.
Mail Stop 4-C
555 Technology Square
Cambridge, MA 02139
(617) 258-2283
Chikatoshi Satoh
Nihon University
7-24-I, Narashinodai
Funbashi-city, Chiba-pref
274 Japan81-47-466-1111
Claire Savaglio
University of Michigan
Aerospace Engineering
3217 Harvard
Royal Oak, MI 48072(313) 288-5668
Ralph Schinnerer
Ford Aerospace
10440 State Highway 83
Colorado Springs, CO 80908
(303) 594-1367
355
Silvano Sgubini
Universita Di Roma
Dipartimento Aerospaziale
Via Salaria 851
00100 Roma, Italy
39-6-8120529
Stanley D. Shawhan
NASA Headquarters
Branch Chief, Space Plasma Physics
Mail Code EES
Washington, DC 20546
(202) 453-1676
Anna Sinopoli
Universita di Venice
Assistant Professor
S. Croce 191
30125 Venice, Italy
39-49-8071033
Emil Soderberg
Analysis & Technology
258 Bank Stret
New London, CT 06320
(203) 444-0827
Carl I. Soderland
NASA Johnson Space Center
Code EH24
Houston, TX 77058
(713) 483-4405
Thomas H. Stengle
NASA Goddard Space Flight Center
Mail Code 554.1
Greenbelt, MD 20771
(301) 286-6354
Stephen W. Strom
TRW Defense Systems Group
PO Box 58327
Houston, TX 77258
(713) 333-3133
Thomas D. Stuart
NASA Headquarters
Office of Space Flight
Mail Code MST
Washington, DC 20546
(202) 453-1562
356
Daniel Swanson
Princeton University
MAE Department
Eng. Quadrangle
Princeton, NJ 08544
(609) 452-6083
Frank R. Swenson
Tri-State University
Professor, Mechanical Engineering
Angola, IN 46703-0307
(219) 665-3141, ext. 256
Giorgio Tacconi
University of Genova
Dipartimento Dibe Universlta Genova
Via dell_Opera Pie II A
16145 Genova, Italy
39-10-311811
John M. Van Pelt
Martin Marietta Denver Aerospace
Mail Stop $8071PO Box 179
Denver, CO 80201
(303) 977-4888
Floriano Venditti
Aeritalla
Space Systems Group
Dynamic Systems DirectorCorso Marche 41
10146 Torino, Italy
39-11-3332752
Serglo Vetrella
Unlversita di Napoli
Istituto Gasdinamica
P.le Tecchio 80
08125 Napoli, Italy
39-81-7682159
Andy Von FlotowMassachusetts Institute of Technology
Department of Aeronautics and Astronautics
7755 Massachusetts Avenue
Cambridge, MA 02139
(617) 253-4865
357
RogerWackerMcDonnellDouglasAstronautics Co.Mall CodeT5K16055SpaceCenterBlvd.Houston,TX 77062(713)280-1772
Justin WallsUniversity of Alabamaat HuntsvilleHuntsville, AL 35899(205)895-6126
DouglassWheeluckUniversity of Alabamaat HuntsvilleHuntsville, AL 35899(205)895-6126
RogerWilllamsonStanfordUniversitySTARLab/SERADurandBldg., Room331Stanford,CA 94305-4055(415) 723-9774
HenryWolfAnalytical MechanicsAssociates, Inc.17ResearchDriveHampton,VA 23666-1398(804)865-0944
HolgerWolffMesserschmittBoelkowBlohnGMBHPostfach8011698012OttobrunnMuenchen,WestGermany49-84-60007762
William WoodisMartinMarietta DenverAerospaceMail StopS-8073POBox179Denver,CO 80201(303) 977-6452
Italo ZoninEmbry-RlddleAeronauticalUniversity327Wilder Blvd.Unit 6-104DaytonaBeach,FL 32014(904) 252-4976
358

1. Report No. 2. Government Accession No. 3. Recipient's Catalog No.
NASA CP-2458
4. Title and Subtitle
Tether Dynamics Simulation
7. Author(s)
9. Peforming Organization Nameand Address
NASA Office of Space Flight, Advanced Programs
Washington, DC 20546
and
George C. Marshall Space Flight Center
Marshall Space Flight Center, Alabama 35812
12. SponsoringAgencyNameandAddress
National Aeronautics and Space Administration
Washington, DC 20546
5. Report Date
February 1987
6. Performing Organization Code
MTS
8. Performing Organization Report No.
10. Work Unit No.
11. Contract or Grant No.
13. Type of Report and Period Covered
Conference Publication
14. Sponsoring Agency Code
15. Supplementary Notes
The proceedings of the International Conference on Tethers in Space,
published under the auspices of the American Astronautical Society under
the title Volume 62, Advances in the Astronautical Sciences; Tethers in
Space, are available from Univelt, Inc., P.O. Box 28130, San Diego, CA 92128.
16. Abstract
The proceedings of the first Tether Dynamics Simulation Workshop are
presented. The workshop was held at the Hyatt Regency Crystal City Hotel
in Arlington, Virginia, September 16, 1986, in conjunction with the
International Conference on Tethers in Space. The objective of this work-
shop was to provide a forum for the discussion of the structure and status
of existing computer programs which are used to simulate the dynamics of
a variety of tether applications in space. A major topic of the workshop
was the purpose of having different simulation models and the process of
validating them. Guidance on future work in these areas was obtained
from a panel discussion; the panel was composed of resource and technical
managers and dynamic analysts in the tether field. The conclusions of
this panel are also presented in this document.
17. Key Words(SuggestedbyAuthor(s)) electrodynamic
tethers space shuttle tethers
dynamics space station
computer simulation
tethered satellite system
tether dynamics
18. Distribution Statement
Unclassified - Unlimited
Subject Category 37
19. Security Classif.(ofthisrepoR)Unclassified
20. Security Ciassif. (of this page)
Unclassified
21. No. of pages
368
22. Price
At6
NASA-Langley, 1987