Embed Size (px)
Citation preview

ESCUELA DE VERANO DE POTENCIA
“ANGULAR STABILITY ANALYSIS BY USING DYNAMIC TRAYECTORY SENSITIVITIES”DYNAMIC TRAYECTORY SENSITIVITIES”
Enrique Arnoldo Zamora Cárdenas
Agosto 2011
Index
1. Motivation and Justification2. Objectives.3 T j t S iti it (TS) d l f DAE3. Trajectory Sensitivity (TS) model for DAEs.4. DAE Solution and TS computation.5. Location of Series-connected controllers on Transient
Stability.6. Improvement of Voltage Profile.7. Small Signal Stability analysis by using TS.g y y y g8. Conclusions.9. Future research works
Motivation and JustificationMotivation and Justification
• The security assessment of power systems is concerned with the analysisof the system electromechanical dynamics subjected to a disturbance.
• Disturbances in power systems are classified as small and largeaccording to the required modeling and solution methods.g q g
• Dynamic security: the ability of the bulk power electric system towithstand sudden disturbances such as electric short circuits orwithstand sudden disturbances such as electric short circuits orunanticipated loss of system components.
Motivation and JustificationMotivation and Justification
• The TEF-based techniques provide a quantitative index of the stabilitymargin from the energy point of view. However, as the systemdimension increases and the modeling detail is more complex thedimension increases and the modeling detail is more complex, theenergy functions are more difficult to obtain.
Th i d i i l i h d i b l i f• The time domain simulation method is a better tool in terms of accuracy,reliability and modeling capability. However, the stressful computationrequirement and incapability to provide any quantitative stability marginare its main disadvantagesare its main disadvantages.
Motivation and JustificationMotivation and Justification
• In this thesis the TS-based approaches are proposed to improve thepower system security, specifically the stability of transient and smalli l h l i l i f h l i lsignal. The analytical computation of the TS w.r.t. multiple power
system parameters at the same time, provide to a great saving ofcomputational burden.
• The effects of the power system parameters provide easy and directpreventive control strategies to improve the system security. The
li f h h d id h i i d l igenerality of the method avoids the restrictions due to complexity,modeling and size of the system.
ObjectivesObjectives
• General goal: development and proposal of new approaches based onTS i d i h ll i l d i bili iTS, in order to improve the small signal and transient stability in powersystems.
• Stage 1: developing an efficient transient stability program based onpower balance formulation. The program was built up in language C++following an OOP philosophy and considering sparsity and pre-orderingt h itechniques.
ObjectivesObjectives
• Stage 2: implementing an efficient TS methodology in the transientstability program The efficiency of the TS method depends on thestability program. The efficiency of the TS method depends on thecomputational burden saving due to its analytical computation, whichpermitted the computation of sensitivities w.r.t. multiple parameters atthe same time.the same time.
• Stage 3: in the last stage several approaches were developed and testedin order to improve the power system stability in the small and largein order to improve the power system stability in the small and largedisturbance.
General representation of Electric Power Systems
• An electric power system can be analytically represented by a set ofparameter-dependent differential equations constrained by a set ofalgebraic equations
( , , ) :0 ( , , ) :
n m p n
n m p m
x f x y fg x y g
( , , )
n m p
g y gx X y Y
where x is a vector of the dynamic state variables, y is a vector of thealgebraic variables, and β is a set of non-time varying systemparameters.
Trajectory sensitivity model forDifferential-Algebraic Equations
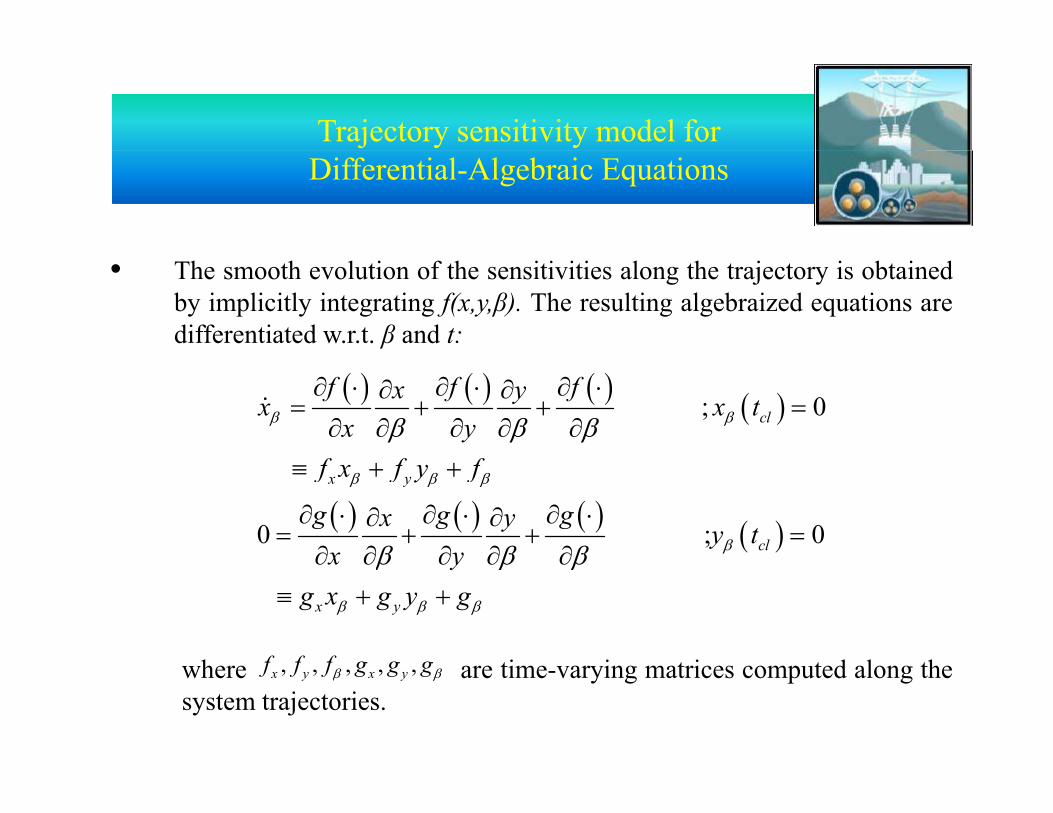
• The smooth evolution of the sensitivities along the trajectory is obtainedby implicitly integrating f(x,y,β). The resulting algebraized equations aredifferentiated w.r.t. β and t:
; 0cl
f f fx yx x tx y
f f f
0 ; 0
x y
cl
f x f y f
g g gx y y tx y
h ti i t i t d l th
x y
x yg x g y g
f f f g g gwhere are time-varying matrices computed along thesystem trajectories.
, , , , ,x y x yf f f g g g
Difference equationsDifference equations
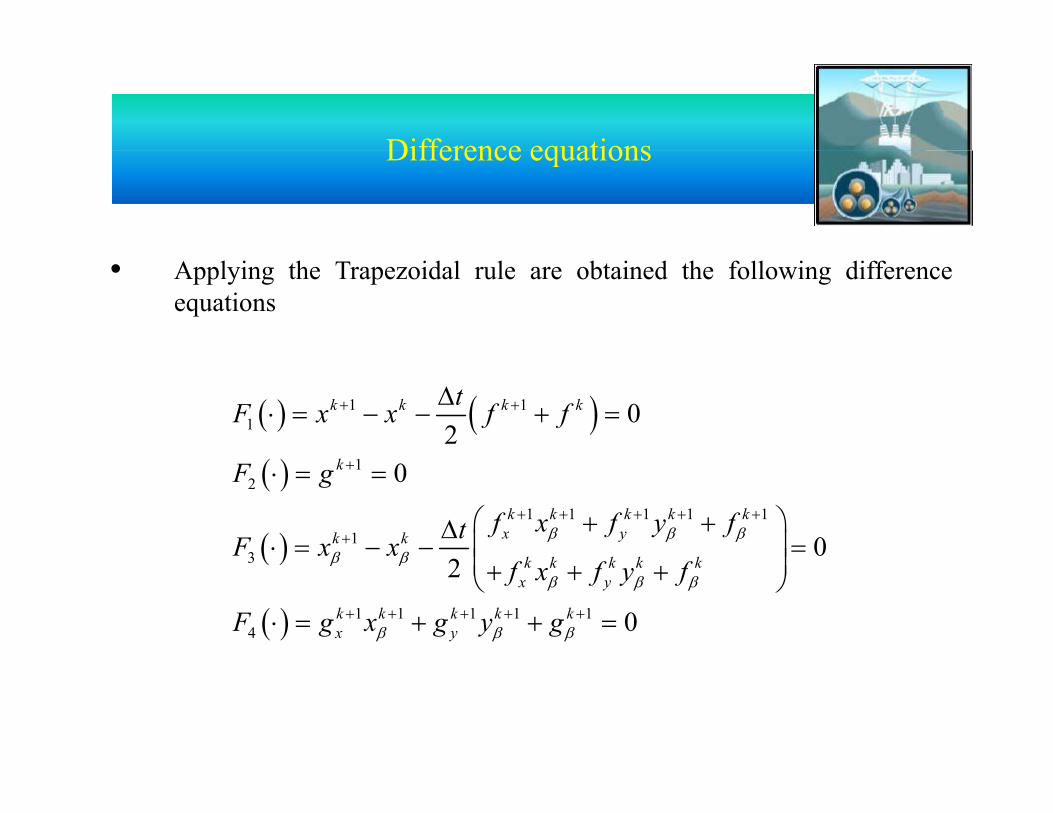
• Applying the Trapezoidal rule are obtained the following differenceequations
1 11 0
2k k k ktF x x f f
12
1 1 1 1 11
3
0
02
k
k k k k kx yk k
k k k k k
F g
f x f y ftF x x
3
1 1 1 1 14
2
0
k k k k kx y
k k k k kx y
f x f y f
F g x g y g
DAE Solution and TS computationDAE Solution and TS computation
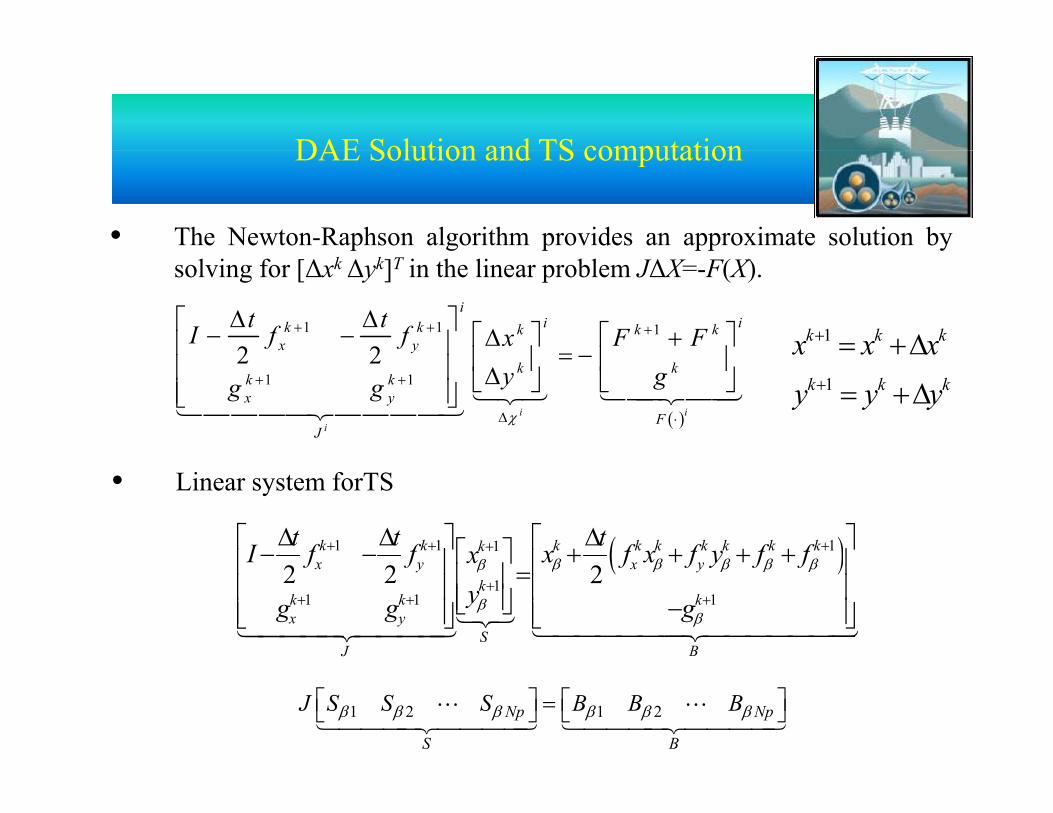
• The Newton-Raphson algorithm provides an approximate solution bysolving for [Δxk Δyk]T in the linear problem JΔX=-F(X).
1 1 1
2 2
ii ik k k k k
x yt tI f f x F F
1k k kx x x
1 12 2
i ii
k kk kx y
FJ
y gg g
1k k ky y y
1 1 11k k k k k k k k kkt t tI f f x f x f y f fx
• Linear system forTS
1
1 1 12 2 2x y x y
kk k kx y
SBJ
I f f x f x f y f fxyg g g
1 2 1 2Np Np
S B
J S S S B B B
Location of series-connected controllers on Transient Stability
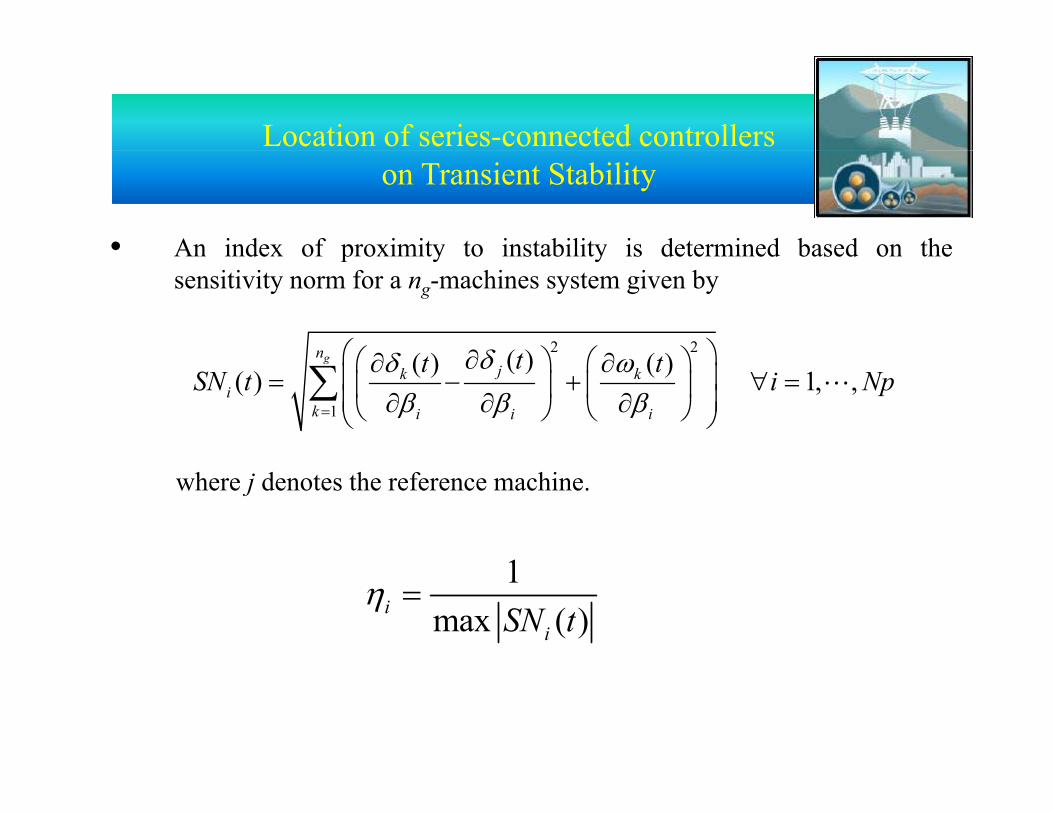
• An index of proximity to instability is determined based on theAn index of proximity to instability is determined based on thesensitivity norm for a ng-machines system given by
2 2( )( ) ( )n t
1
( )( ) ( )( ) 1, ,
gnjk k
ik i i i
tt tSN t i Np
where j denotes the reference machine.
11max ( )i
iSN t
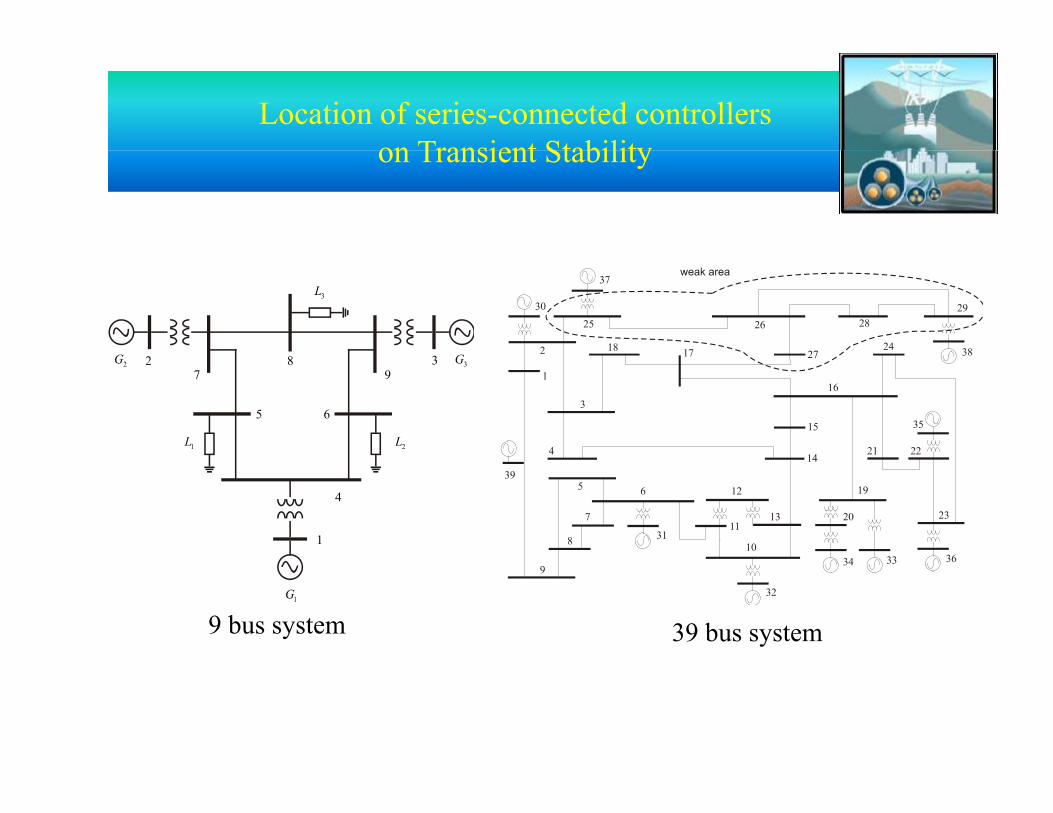
Location of series-connected controllers on Transient Stabilityon Transient Stability
9 bus system 39 bus system
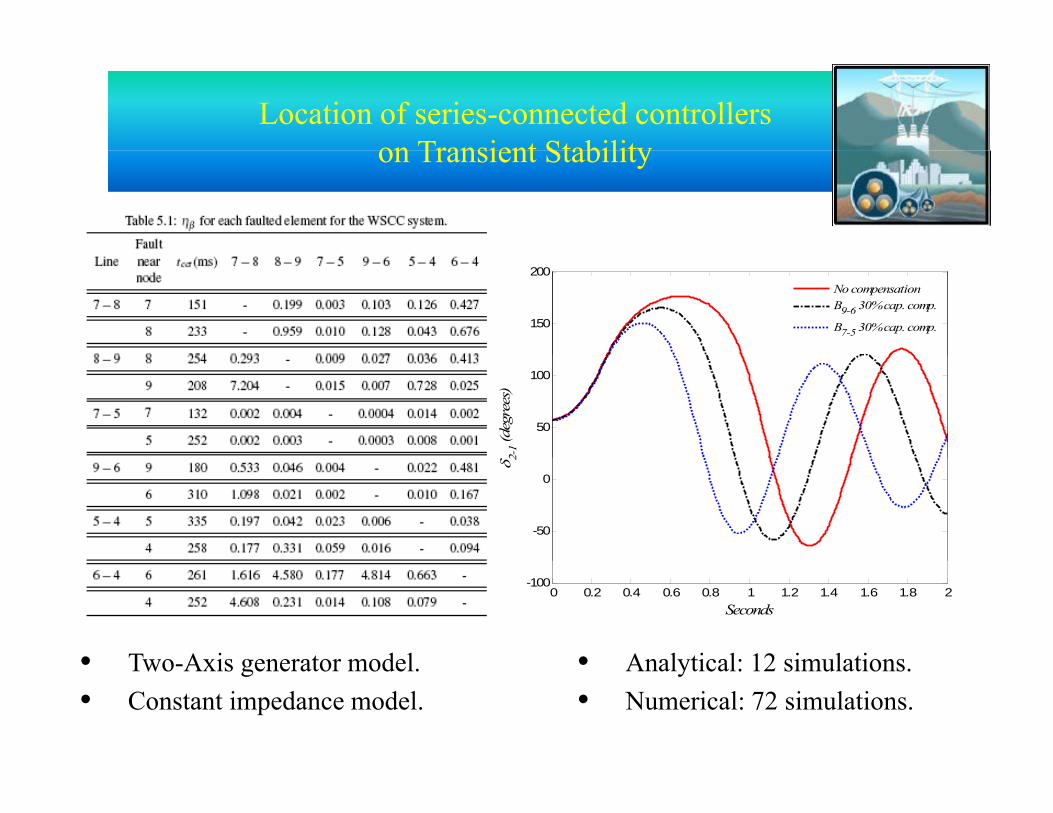
Location of series-connected controllers on Transient Stabilityon Transient Stability
150
200 No compensationB9-6 30% cap. comp.
B7-5 30% cap. comp.
50
100
2-1
(deg
rees
)
-50
0
2
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-100
Seconds
• Two Axis generator model • Analytical: 12 simulations• Two-Axis generator model.• Constant impedance model.
• Analytical: 12 simulations.• Numerical: 72 simulations.
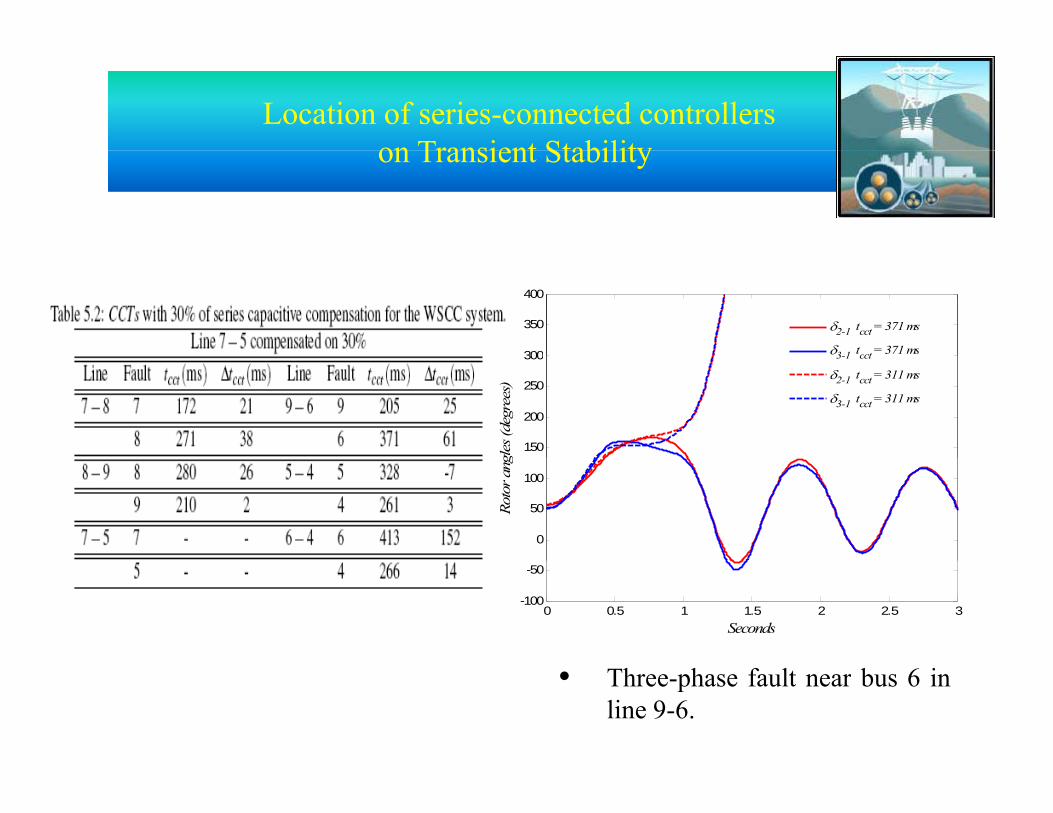
Location of series-connected controllers on Transient Stabilityon Transient Stability
300
350
400
2-1 tcct = 371 ms
3 1 tcct = 371 ms
150
200
250
300
gles
(deg
rees
)
3-1 cct
2-1 tcct = 311 ms
3-1 tcct = 311 ms
0
50
100
Roto
r ang
0 0.5 1 1.5 2 2.5 3-100
-50
Seconds
• Three-phase fault near bus 6 inline 9-6.
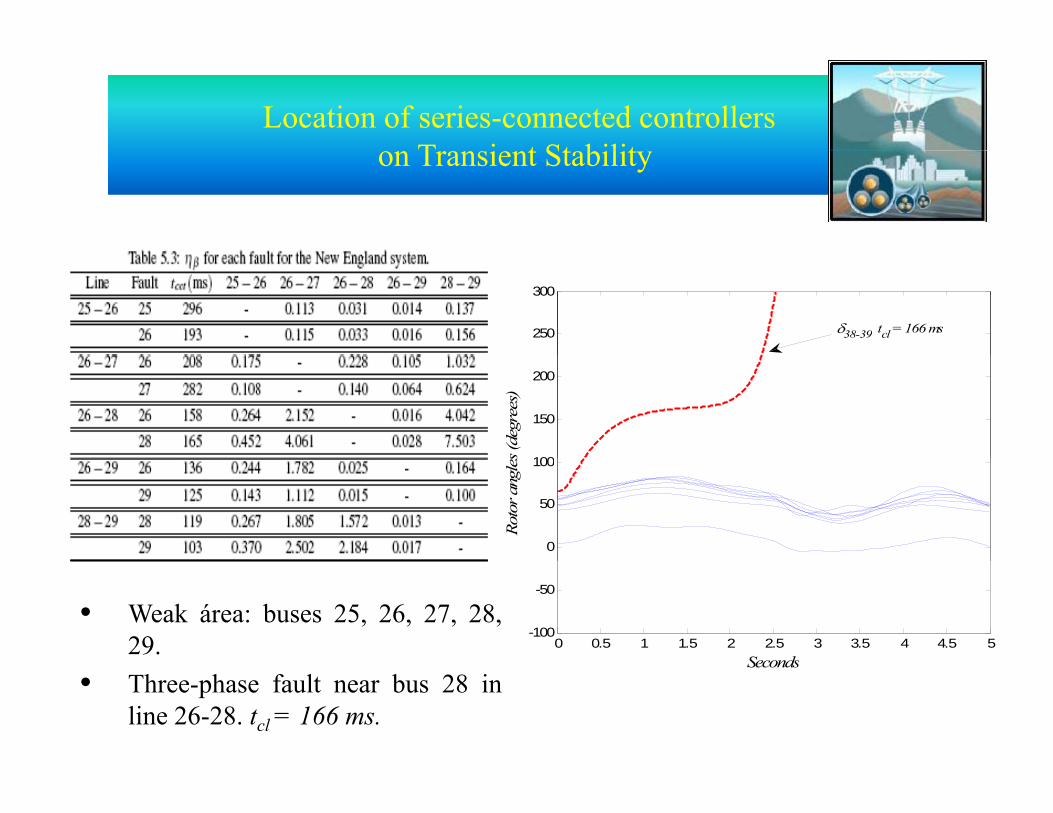
Location of series-connected controllers T i t St biliton Transient Stability
250
300
38-39 tcl = 166 ms
100
150
200
s (de
gree
s)
0
50
100
Roto
r ang
les
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-100
-50
Seconds
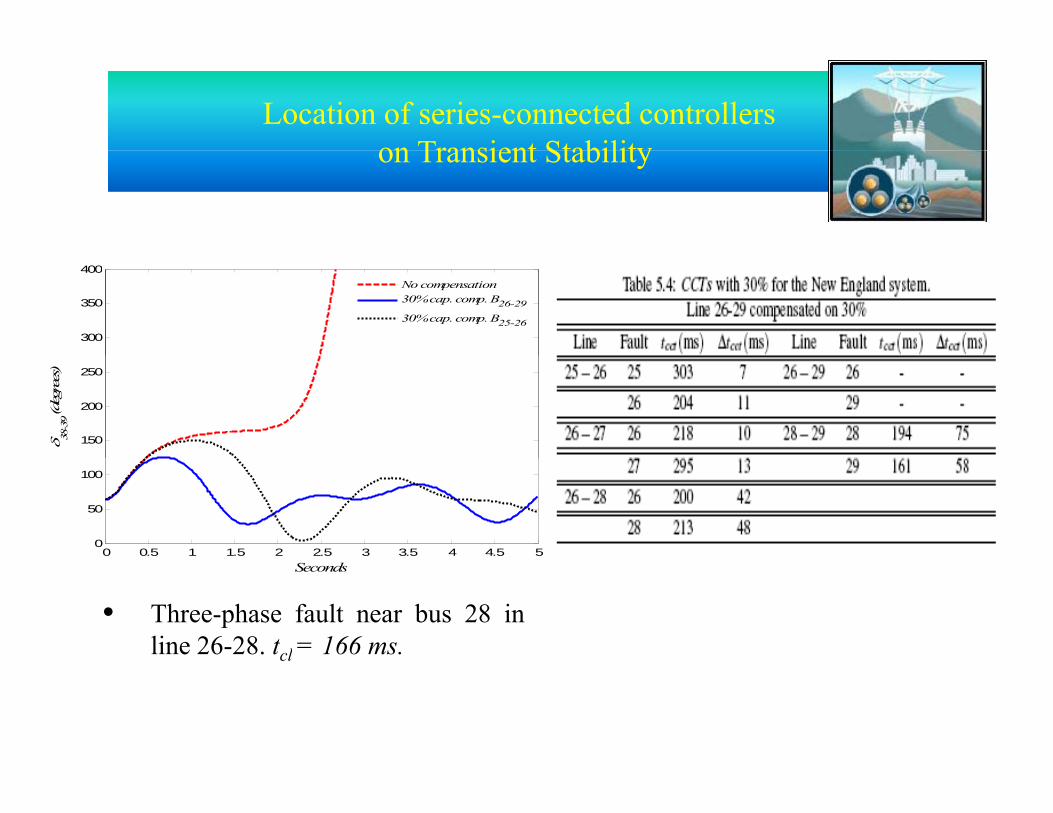
• Weak área: buses 25, 26, 27, 28,29.
Seconds• Three-phase fault near bus 28 in
line 26-28. tcl = 166 ms.
Location of series-connected controllers on Transient Stabilityon Transient Stability
300
350
400No compensation30% cap. comp. B26-29
30% cap. comp. B25-26
150
200
250
38-3
9 (deg
rees
)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
50
100
Seconds
• Three-phase fault near bus 28 inline 26-28. tcl = 166 ms.
Improvement of Voltage Profile
• To quantify the loads effect we propose to use a voltage profile index based
p g
• To quantify the loads effect we propose to use a voltage profile index basedon the sum of all trajectory sensitivities of voltage magnitudes.
nb V1
1,...,nb
ki
k i
VSV i Np
Improvement of Voltage Profilep g
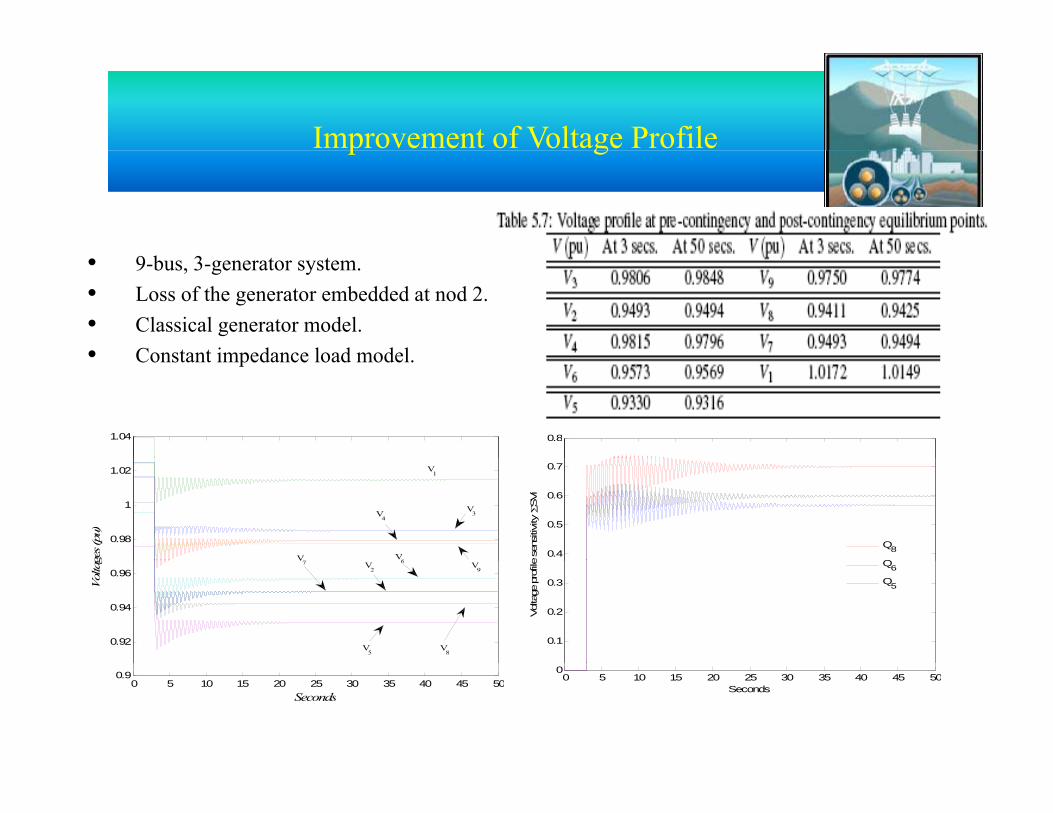
• 9-bus, 3-generator system.• Loss of the generator embedded at nod 2.• Classical generator model.• Constant impedance load model
1.04 0.8
• Constant impedance load model.
0.98
1
1.02
ges (
pu)
V1
V V6
V3V
4
0.4
0.5
0.6
0.7
e se
nsitivity
SVi
Q8
Q
0.92
0.94
0.96
Volta
g V2
V8
V5
V7 6 V
9
0.1
0.2
0.3
Volta
ge p
rofile Q6
Q5
0 5 10 15 20 25 30 35 40 45 500.9
Seconds
0 5 10 15 20 25 30 35 40 45 500
Seconds
Improvement of Voltage Profile p g
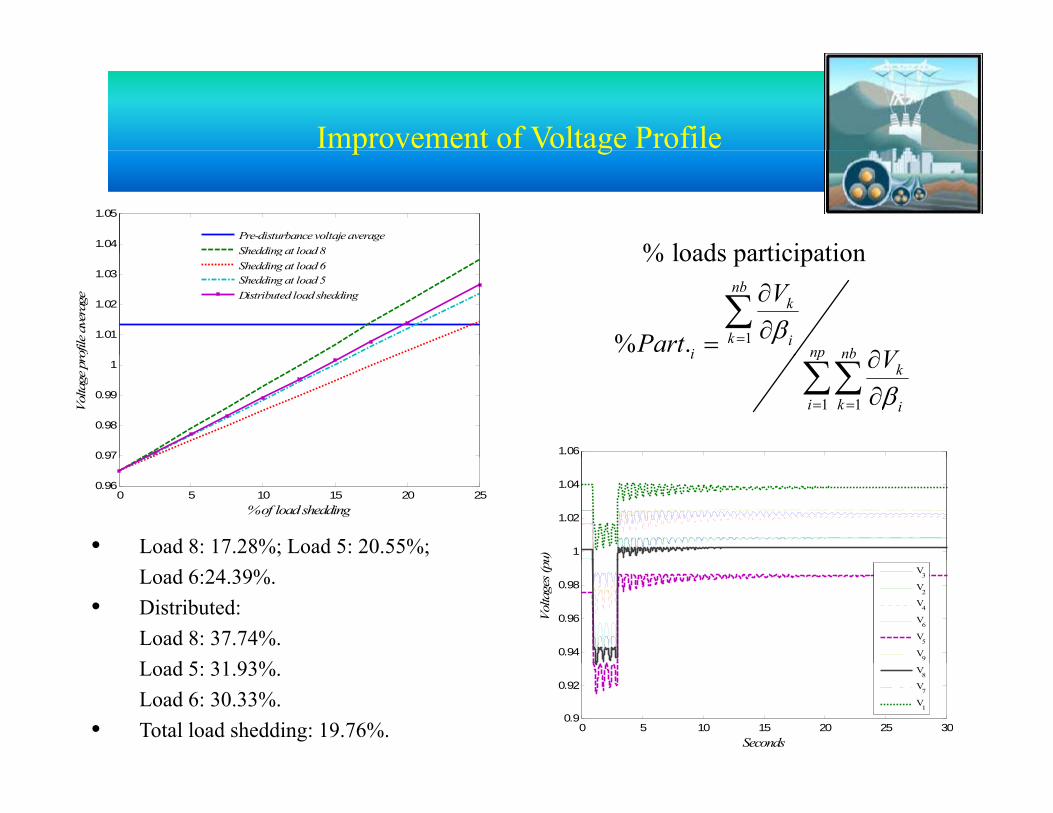
% loads participation1.04
1.05
Pre-disturbance voltaje averageShedding at load 8
1
% loads participation
% .
nbk
k inp nbi
V
Part V
1.01
1.02
1.03
ofile
ave
rage
Shedding at load 8Shedding at load 6Shedding at load 5Distributed load shedding
1 1
np nbik
i k i
V
0.97
0.98
0.99
1
Volta
ge p
ro
1.06
0 5 10 15 20 250.96
0.97
% of load shedding
1
1.02
1.04
u)• Load 8: 17.28%; Load 5: 20.55%;
0.94
0.96
0.98
Volta
ges (
pu V3
V2
V4
V6
V5
V9
Load 6:24.39%.• Distributed:
Load 8: 37.74%.L d 5 31 93%
0 5 10 15 20 25 300.9
0.92
Seconds
V8
V7
V1
Load 5: 31.93%.Load 6: 30.33%.
• Total load shedding: 19.76%.
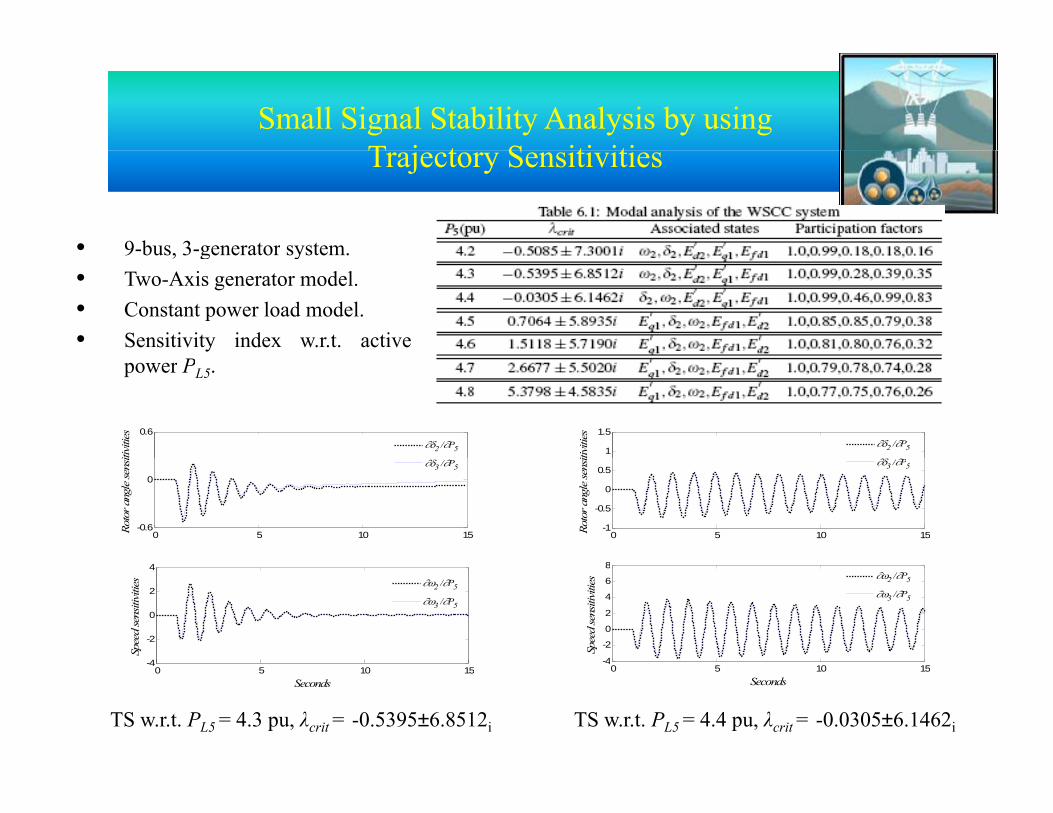
Small Signal Stability Analysis by using T j t S iti itiTrajectory Sensitivities
• 9-bus 3-generator system9 bus, 3 generator system.• Two-Axis generator model.• Constant power load model.• Sensitivity index w.r.t. active
0.6
itivi
ties
2 /P5 1
1.5
itivi
ties
2 /P5
power PL5.
0 5 10 15-0.6
0
Roto
r ang
le se
nsi
3 /P5
0 5 10 15-1
-0.5
0
0.5
Roto
r ang
le se
nsi
3 /P5
4
-2
0
2
4
Spee
d se
nsiti
vitie
s
2 /P5
3 /P5
-4
-2
0
2
4
6
8
Spee
d se
nsiti
vitie
s 2 /P5
3 /P5
0 5 10 15-4
Seconds
0 5 10 154
Seconds
TS w.r.t. PL5 = 4.3 pu, λcrit = -0.5395±6.8512i TS w.r.t. PL5 = 4.4 pu, λcrit = -0.0305±6.1462i

Small Signal Stability Analysis by using T j t S iti itiTrajectory Sensitivities
1
2
3
e se
nsiti
vitie
s
2/P5
3/P5
0 5 10 15-2
-1
0
Roto
r ang
le
10
tiviti
es
2/P5
3/P5
0 5 10 15-10
0
Seconds
Spee
d se
nsit
3/P5
TS w.r.t. PL5 = 4.41 pu, λcrit = 0.0462±6.1105i
1.2
1.4
1.6
1.8
m S
N
SN w.r.t. P8
SN w.r.t. P6
SN w.r.t. P5
• Reduction of 99% in forward/backward substitutions.• Assessment of NP parameters at the same time.
0.2
0.4
0.6
0.8
1
Sens
itivi
ty N
orm
0 1 2 3 4 5 6 70
Seconds
Loads’ effect on the EP stability. Base case of load demand.

Small Signal Stability Analysis by using T j t S iti itiTrajectory Sensitivities
• 190-bus, 46-generator system.• Two Axis generator modelTwo-Axis generator model.• Constant power load model.• 91 loads.
Mexican power system.
Small Signal Stability Analysis by using Trajectory SensitivitiesTrajectory Sensitivities
3
X = 152Y = 2.93
1.5
32 / P152
1.5
2
2.5
ivity
nor
m S
Ni X = 120
Y = 1.78
X = 145Y = 2.17
0.5
1
33 / P152
60 80 100 120 140 160 1800
0.5
1Sens
iti
-1
0.5
0
60 80 100 120 140 160 180Load nodes
0 5 10 15 20 25 30Seconds
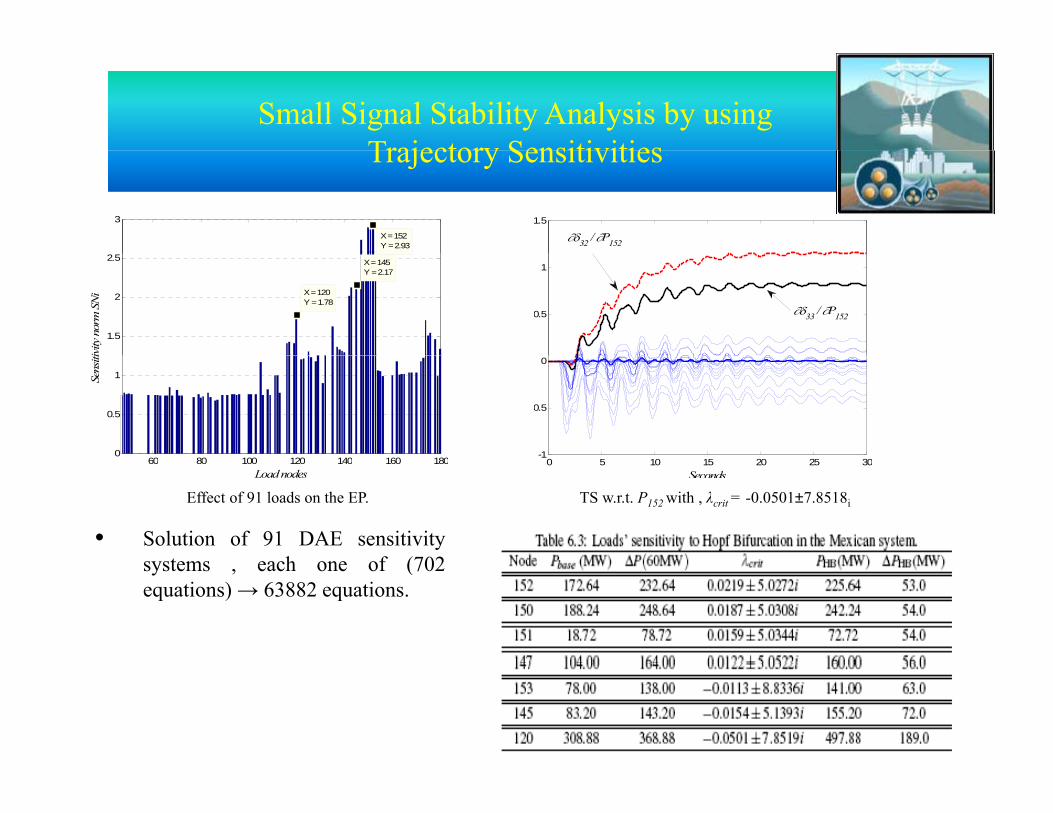
Effect of 91 loads on the EP.
• Solution of 91 DAE sensitivityt h f (702
TS w.r.t. P152 with , λcrit = -0.0501±7.8518i
systems , each one of (702equations) → 63882 equations.
ConclusionsConclusions
• This research has been focused on developing Trajectory Sensitivity-basedapproaches for improving the security of electric power systems.pp p g y p y
• A Transient Stability digital program was developed considering the power balancef l i i d d i h iformulation, sparsity and pre-ordering techniques.
• An efficient methodology to compute TS w r t multiple parameters of the power• An efficient methodology to compute TS w.r.t. multiple parameters of the powersystems at the same time, was implemented in C++ programming language underan object oriented programming philosophy.
Conclusions|Conclusions|
• The digital program was used on locating series-connected controllers to improveth T i t St bilit f l b l i i t b ti th t itithe Transient Stability from a global viewpoint by compensating the most sensitivetransmission line in a geographical area of a power system.
• To estimate the total load to be shed, as well as its distribution percentages toimprove the voltage profile of power systems.
• To identify the most influential loads to improve the Small Signal Stability of EPs.
Future research worksFuture research works
• Use Trajectory Sensitivities to estimate the amount of series compensation requiredto obtain the maximum improvement of the transient stabilityto obtain the maximum improvement of the transient stability.
• Compute Trajectory Sensitivities on-line together with dynamic state estimation.
• Integrate the sensitivity and selective modal analyses in a general approach suitableto identify the most associated system parameter to the critical eigenvalue.
• Increase the computational efficiency in the security assessment by using thecurrent injection formulation for transient stability and the power flow formulationto compute TS.p