Embed Size (px)
Citation preview

Analytical Modeling of Vanishing Points and Curves in Catadioptric Cameras(Supplementary Material)
Pedro MiraldoInstituto Superior Tecnico, Lisboa
Francisco EirasUniversity of Oxford
Srikumar RamalingamUniversity of Utah
Contents
A. Appendix for the computation of vanishing points for a given directions Secs. 2.1 and 2.2 2A.1. Axial Case . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2A.2. Spherical mirror (A “ 1, B “ 0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3A.3. Ellipsoid mirror (A “ 0, C “ 0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3A.4. Conical mirror (B “ 0, C “ 0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4A.5. Cylindrical mirror (A “ 0, B “ 0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4A.6. Compute Vanishing Points . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
B. Appendix for the computation of direction for a given vanishing points 6B.1. Coefficients of the polynomial equations Sec. 2.3 . . . . . . . . . . . . . . . . . . . . . . . . . . . 6B.2. Numerical Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
C. Appendix for computations related to Vanishing Curves 8C.1. Computing a Curve at the Infinity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8C.2. Coefficients Curves at the Infinity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9C.3. Coefficients of curves at the infinity: Axial case . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10C.4. Coefficients of curves at the infinity: Spherical mirror (A “ 1, B “ 0) . . . . . . . . . . . . . . . . 10C.5. Coefficients of curves at the infinity: Ellipsoid mirror (A “ 0, C “ 0) . . . . . . . . . . . . . . . . 11C.6. Coefficients of curves at the infinity: Conical mirror (B “ 0, C “ 0) . . . . . . . . . . . . . . . . 11C.7. Coefficients of curves at the infinity: Cylindrical mirror (A “ 0, B “ 0) . . . . . . . . . . . . . . . 11C.8. Solving Curves at the Infinity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
D. Vanishing Points in Central Unified Spherical Model 14D.1. Line Projection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14D.2. Modeling Vanishing Points using the Central Unified Model . . . . . . . . . . . . . . . . . . . . . 14
E. Numerical Example of the Absolute Pose Estimation using Minimal Data 14
1

In this supplementary material, we show some important derivations and numerical examples supporting thepaper Analytical Modeling of Vanishing Points and Curves in Catadioptric Cameras.
A. Appendix for the computation of vanishing points for a given directions Secs. 2.1 and 2.2
In this appendix we show the coefficients of the polynomial equations used to compute the coordinates of thevanishing point in the mirror, i.e. κ39ry, zs and κ410ry, zs:
a1 “8s3c2 (1)
a2 “4s3A2 ´ 4s3A (2)
a3 “4ABs3 ´ 8As2c2 ` 8As3c3 (3)
a4 “B2s3 ´ 4Cs3 ´ 4Bs2c2 ` 4Bs3c3 (4)
a5 “´ 4s2A2 ` 4s2A (5)
a6 “4Bs2 ´ 8ABs2 ´ 4As2c3 ` 4As3c2 ´ 4A2s2c3 ´ 4A2s3c2 (6)
a7 “8ACs2 ´ 3B2s2 ´ 4Cs2 ´ 4Bs2c3 ` 4Bs3c2 ´ 4ABs2c3 ´ 4ABs3c2 (7)
a8 “4BCs2 ` 4Cs2c3 ´ 4Cs3c2 ´B2s2c3 ´B
2s3c2, (8)
and
b1 “s21p2A´ 2q2 ` p2s2 ´ 2As2q
2 (9)
b2 “2pB ` 2c3qp2A´ 2qs21 ´ 2p2s2 ´ 2As2qpBs2 ` 2s2c3 ´ 2s3c2q (10)
b3 “pBs2 ` 2s2c3 ´ 2s3c2q2 ` s21pB ` 2c3q
2 (11)
b4 “´ 4As21c2p2A´ 2q (12)
b5 “´ s21p2Bc2p2A´ 2q ` 4Ac2pB ` 2c3qq (13)
b6 “´ 2Bs21c2pB ` 2c3q (14)
b7 “Ap2s2 ´ 2As2q2 (15)
b8 “Bp2s2 ´ 2As2q2 ´ 2Ap2s2 ´ 2As2qpBs2 ` 2s2c3 ´ 2s3c2q (16)
b9 “ApBs2 ` 2s2c3 ´ 2s3c2q2 ´ Cp2s2 ´ 2As2q
2 ` 4A2s21c22 ´ 2Bp2s2 ´ 2As2qpBs2 ` 2s2c3 ´ 2s3c2q
(17)
b10 “BpBs2 ` 2s2c3 ´ 2s3c2q2 ` 2Cp2s2 ´ 2As2qpBs2 ` 2s2c3 ´ 2s3c2q ` 4ABs21c
22 (18)
b11 “B2s21c
22 ´ CpBs2 ` 2s2c3 ´ 2s3c2q
2. (19)
The coefficients of the polynomial equations shown above were derived for the general case. When consid-ering specific cases, these coefficients are simplified significantly and, in many cases, they are eliminated. As aconsequence, in many cases, the degree of polynomial equations are reduced. Results for general axial, axial witha spherical mirror, axial with an ellipsoid mirror, axial with conical mirror, and axial with cylindrical mirror areshown below.
A.1. Axial Case
In the axial case, the camera movement has to be restricted to motion in the uz axis, therefore, c2 “ 0. Thegeneral equations become:
κ39 ry, zs “ a1yz2 ` a2yz ` a3y ` a4z
3 ` a5z2 ` a6z ` a7, (20)
with:
2

a1 “4s3A2 ´ 4s3A (21)
a2 “4ABs3 ` 8As3c3 (22)
a3 “s3B2 ` 4s3c3B ´ 4Cs3 (23)
a4 “´ 4s2A2 ` 4s2A (24)
a5 “4Bs2 ´ 8ABs2 ´ 4As2c3 ´ 4A2s2c3 (25)
a6 “48ACs2 ´ 3B2s2 ´ 4Cs2 ´ 4Bs2c3 ´ 4ABs2c3(26)
a7 “s2c3B2 ` 4Cs2B ` 4Cs2c3, (27)
and:κ410 ry, zs “ b1y
2z2 ` b2y2z ` b3y
2 ` b4z4 ` b5z
3 ` b6z2 ` b7z ` b8, (28)
with:
b1 “s21p2A´ 2q2 ` p2s2 ´ 2As2q
2 (29)
b2 “2pB ` 2c3qp2A´ 2qs21 ´ 2p2s2 ´ 2As2qpBs2 ` 2s2c3q (30)
b3 “s21pB ` 2c3q
2 ` pBs2 ` 2s2c3q2 (31)
b4 “Ap2s2 ´ 2As2q2 (32)
b5 “Bp2s2 ´ 2As2q2 ´ 2Ap2s2 ´ 2As2qpBs2 ` 2s2c3q (33)
b6 “ApBs2 ` 2s2c3q2 ´ Cp2s2 ´ 2As2q
2 ´ 2Bp2s2 ´ 2As2qpBs2 ` 2s2c3q (34)
b7 “BpBs2 ` 2s2c3q2 ` 2Cp2s2 ´ 2As2qpBs2 ` 2s2c3q (35)
b8 “´ CpBs2 ` 2s2c3q2. (36)
(37)
A.2. Spherical mirror (A “ 1, B “ 0)
Constraints for the spherical mirror are:
κ29 ry, zs “ a1yz ` a2y ` a3z2 ` a4z ` a5, (38)
with:
a1 “8s3c3 (39)
a2 “´ 4Cs3 (40)
a3 “´ 8s2c3 (41)
a4 “4Cs2 (42)
a5 “4Cs2c3, (43)
and:κ210 ry, zs “ b1y
2 ` b2z2 ` b3 (44)
with:
b1 “ 4s21c23 ` 4s22c
23 (45) b2 “ 4s22c
23 (46) b3 “ ´4Cs22c
23. (47)
A.3. Ellipsoid mirror (A “ 0, C “ 0)
Constraints for the ellipsoid mirror are:
κ29 ry, zs “ a1y ` a2z2 ` a3z ` a4, (48)
with:
3

a1 “s3B2 ` 4s3c3B (49)
a2 “4Bs2 (50)
a3 “´ 3s2B2 ´ 4s2c3B (51)
a4 “´B2s2c3, (52)
and:κ410 ry, zs “ b1y
2z2 ` b2y2z ` b3y
2 ` b4z3 ` b5z
2 ` b6z, (53)
with:
b1 “4s21 ` 4s22 (54)
b2 “p´4B ´ 8c3qs21 ´ 4s2pBs2 ` 2s2c3q (55)
b3 “s21pB ` 2c3q
2 ` pBs2 ` 2s2c3q2 (56)
b4 “4Bs22 (57)
b5 “´ 4Bs2pBs2 ` 2s2c3q (58)
b6 “BpBs2 ` 2s2c3q2. (59)
A.4. Conical mirror (B “ 0, C “ 0)
Constraints for the conical mirror are:
κ39 ry, zs “ a1yz2 ` a2yz ` a3z
3 ` a4z2, (60)
with:
a1 “4s3A2 ´ 4s3A (61)
a2 “8As3c3 (62)
a3 “´ 4s2A2 ` 4s2A (63)
a4 “´ 4s2c3A2 ´ 4s2c3A, (64)
and:κ410 ry, zs “ b1y
2z2 ` b2y2z ` b3y
2 ` b4z4 ` b5z
3 ` b6z2, (65)
with:
b1 “s21p2A´ 2q2 ` p2s2 ´ 2As2q
2 (66)
b2 “4c3p2A´ 2qs21 ´ 4s2c3p2s2 ´ 2As2q (67)
b3 “4s21c23 ` 4s22c
23 (68)
b4 “Ap2s2 ´ 2As2q2 (69)
b5 “´ 4As2c3p2s2 ´ 2As2q (70)
b6 “4As22c23. (71)
A.5. Cylindrical mirror (A “ 0, B “ 0)
Constraints for the cylindrical mirror are:
κ19 ry, zs “ a1y ` a2z ` a3, (72)
with:
a1 “´ 4Cs3 (73) a2 “´ 4Cs2 (74) a3 “4Cs2c3, (75)
and:κ410 ry, zs “ b1y
2z2 ` b2y2z ` b3y
2 ` b4z2 ` b5z ` b6, (76)
with:
4

b1 “4s21 ` 4s22 (77)
b2 “´ 8c3s21 ´ 8c3s
22 (78)
b3 “4s21c23 ` 4s22c
23 (79)
b4 “´ 4Cs22 (80)
b5 “8Cs22c3 (81)
b6 “´ 4Cs22c23. (82)
A.6. Compute Vanishing Points
Following the derivations described in Sec. 2.2 (Computing Vanishing Points from a Given Direction), to com-pute vanishing points, we end up with a 10th degree polynomial (in the general case), as defined below:
κ1016 rzs “c1z10 ` c2z
9 ` c3z8 ` c4z
7 ` c5z6 ` c6z
5 ` c7z4 ` c8z
3 ` c9z2 ` c10z
1 ` c11, (83)
where:
c1 “pb7a22b1 ` a
25b
21qa
21 (84)
c2 “pb8a22b1 ` b2b7a
22 ´ b4a2a5b1 ` 2a3b7a2b1 ` 2b2a
25b1 ` 2a6a5b
21 ´ 2a1b7a5b1qa
21 (85)
c3 “pa21b
27 ´ b4a1a2b7 ´ 2b8a1a5b1 ´ 2a1a5b2b7 ´ 2a1a6b1b7 ` b9a
22b1 ` b8a
22b2 ` b3a
22b7`
` 2b8a2a3b1 ` 2a2a3b2b7 ´ b5a2a5b1 ´ b4a2a5b2 ´ b4a2a6b1 ` 2a4a2b1b7 ` a23b1b7 ´ b4a3a5b1`
` 2b3a25b1 ` a
25b
22 ` 4a5a6b1b2 ` 2a7a5b
21 ` a
26b
21qa
21 (86)
c4 “p2b7b8a21 ´ b8a1a2b4 ´ b5b7a1a2 ´ b7a1a3b4 ´ 2b9a1a5b1 ´ 2b8a1a5b2 ` a1a5b
24 ´ 2b3b7a1a5´
´ 2b8a1a6b1 ´ 2b7a1a6b2 ´ 2a7b7a1b1 ` b10a22b1 ` b9a
22b2 ` b3b8a
22 ` 2b9a2a3b1 ` 2b8a2a3b2`
` 2b3b7a2a3 ´ b6a2a5b1 ´ b5a2a5b2 ´ b3a2a5b4 ´ b5a2a6b1 ´ a2a6b2b4 ´ a7a2b1b4 ` 2a4b8a2b1`
` 2a4b7a2b2 ` b8a23b1 ` b7a
23b2 ´ b5a3a5b1 ´ a3a5b2b4 ´ a3a6b1b4 ` 2a4b7a3b1 ` 2b3a
25b2`
` 4b3a5a6b1 ` 2a5a6b22 ` 2a8a5b
21 ` 4a7a5b1b2 ´ a4a5b1b4 ` 2a26b1b2 ` 2a7a6b
21qa
21 (87)
c5 “´ p´a21b
28 ´ 2b7b9a
21 ` b9a1a2b4 ` b5a1a2b8 ` b6b7a1a2 ` a1a3b4b8 ` b5b7a1a3 ` b7a1a4b4`
` 2b10a1a5b1 ` 2b9a1a5b2 ` 2a1a5b3b8 ´ 2b5a1a5b4 ` 2b9a1a6b1 ` 2a1a6b2b8 ` 2b7a1a6b3 ´ a1a6b24`
` 2a1a7b1b8 ` 2b7a1a7b2 ` 2a8b7a1b1 ´ b11a22b1 ´ b10a
22b2 ´ b9a
22b3 ´ 2b10a2a3b1 ´ 2b9a2a3b2´
´ 2a2a3b3b8 ´ 2b9a2a4b1 ´ 2a2a4b2b8 ´ 2b7a2a4b3 ` b6a2a5b2 ` b5a2a5b3 ` b6a2a6b1 ` b5a2a6b2`
` a2a6b3b4 ` b5a2a7b1 ` a2a7b2b4 ` a8a2b1b4 ´ b9a23b1 ´ a
23b2b8 ´ b7a
23b3 ´ 2a3a4b1b8´
´ 2b7a3a4b2 ` b6a3a5b1 ` b5a3a5b2 ` a3a5b3b4 ` b5a3a6b1 ` a3a6b2b4 ` a3a7b1b4 ´ b7a24b1`
` b5a4a5b1 ` a4a5b2b4 ` a4a6b1b4 ´ a25b
23 ´ 4a5a6b2b3 ´ 4a5a7b1b3 ´ 2a5a7b
22 ´ 4a8a5b1b2´
´ 2a26b1b3 ´ a26b
22 ´ 4a6a7b1b2 ´ 2a8a6b
21 ´ a
27b
21qa
21 (88)
c6 “´ pa2a5b3b6 ´ a1a7b24 ´ 2a5a6b
23 ´ 2a5a8b
22 ´ 2a6a7b
22 ´ 2a7a8b
21 ´ 2a27b1b2 ´ 2a26b2b3 ´ a
24b1b8´
´ a24b2b7 ´ a23b1b10 ´ a
23b2b9 ´ a
23b3b8 ´ a
22b2b11 ´ a
22b3b10 ´ 2a21b7b10 ´ 2a21b8b9 ´ 2a1a5b4b6´
´ 2a1a6b4b5 ´ a1a5b25 ` a2a6b2b6 ` a2a6b3b5 ` a2a7b1b6 ` a2a7b2b5 ` a2a7b3b4 ` a2a8b1b5`
` a2a8b2b4 ` a3a5b2b6 ` a3a5b3b5 ` a3a6b1b6 ` a3a6b2b5 ` a3a6b3b4 ` a3a7b1b5 ` a3a7b2b4`
` a3a8b1b4 ` a4a5b1b6 ` a4a5b2b5 ` a4a5b3b4 ` a4a6b1b5 ` a4a6b2b4 ` a4a7b1b4 ` a1a2b4b10`
` a1a2b5b9 ` a1a2b6b8 ` a1a3b4b9 ` a1a3b5b8 ` a1a3b6b7 ` a1a4b4b8 ` a1a4b5b7 ´ 2a2a3b1b11´
´ 2a2a3b2b10 ´ 2a2a3b3b9 ´ 2a2a4b1b10 ´ 2a2a4b2b9 ´ 2a2a4b3b8 ´ 2a3a4b1b9 ´ 2a3a4b2b8´
´ 2a3a4b3b7 ´ 4a5a7b2b3 ´ 4a5a8b1b3 ´ 4a6a7b1b3 ´ 4a6a8b1b2 ` 2a1a5b1b11 ` 2a1a5b2b10`
` 2a1a5b3b9 ` 2a1a6b1b10 ` 2a1a6b2b9 ` 2a1a6b3b8 ` 2a1a7b1b9 ` 2a1a7b2b8 ` 2a1a7b3b7`
` 2a1a8b1b8 ` 2a1a8b2b7qa21 (89)
5

c7 “´ pa2a6b3b6 ´ a27b
22 ´ a
28b
21 ´ a
21b
29 ´ a1a6b
25 ´ a1a8b
24 ´ 2a5a7b
23 ´ 2a6a8b
22 ´ 2a27b1b3 ´ a
24b1b9´
´ a24b2b8 ´ a24b3b7 ´ a
23b1b11 ´ a
23b2b10 ´ a
23b3b9 ´ a
22b3b11 ´ 2a21b7b11 ´ 2a21b8b10 ´ 2a1a5b5b6´
´ 2a1a6b4b6 ´ 2a1a7b4b5 ´ a26b
23 ` a2a7b2b6 ` a2a7b3b5 ` a2a8b1b6 ` a2a8b2b5 ` a2a8b3b4`
` a3a5b3b6 ` a3a6b2b6 ` a3a6b3b5 ` a3a7b1b6 ` a3a7b2b5 ` a3a7b3b4 ` a3a8b1b5 ` a3a8b2b4`
` a4a5b2b6 ` a4a5b3b5 ` a4a6b1b6 ` a4a6b2b5 ` a4a6b3b4 ` a4a7b1b5 ` a4a7b2b4 ` a4a8b1b4`
` a1a2b4b11 ` a1a2b5b10 ` a1a2b6b9 ` a1a3b4b10 ` a1a3b5b9 ` a1a3b6b8 ` a1a4b4b9 ` a1a4b5b8`
` a1a4b6b7 ´ 2a2a3b2b11 ´ 2a2a3b3b10 ´ 2a2a4b1b11 ´ 2a2a4b2b10 ´ 2a2a4b3b9 ´ 2a3a4b1b10´
´ 2a3a4b2b9 ´ 2a3a4b3b8 ´ 4a5a8b2b3 ´ 4a6a7b2b3 ´ 4a6a8b1b3 ´ 4a7a8b1b2 ` 2a1a5b2b11`
` 2a1a5b3b10 ` 2a1a6b1b11 ` 2a1a6b2b10 ` 2a1a6b3b9 ` 2a1a7b1b10 ` 2a1a7b2b9 ` 2a1a7b3b8`
` 2a1a8b1b9 ` 2a1a8b2b8 ` 2a1a8b3b7qa21 (90)
c8 “´ pa2a7b3b6 ´ a1a7b25 ´ 2a5a8b
23 ´ 2a6a7b
23 ´ 2a7a8b
22 ´ 2a28b1b2 ´ 2a27b2b3 ´ a
24b1b10´
´ a24b2b9 ´ a24b3b8 ´ a
23b2b11 ´ a
23b3b10 ´ 2a21b8b11 ´ 2a21b9b10 ´ 2a1a6b5b6 ´ 2a1a7b4b6´
´ 2a1a8b4b5 ´ a1a5b26 ` a2a8b2b6 ` a2a8b3b5 ` a3a6b3b6 ` a3a7b2b6 ` a3a7b3b5 ` a3a8b1b6`
` a3a8b2b5 ` a3a8b3b4 ` a4a5b3b6 ` a4a6b2b6 ` a4a6b3b5 ` a4a7b1b6 ` a4a7b2b5 ` a4a7b3b4`
` a4a8b1b5 ` a4a8b2b4 ` a1a2b5b11 ` a1a2b6b10 ` a1a3b4b11 ` a1a3b5b10 ` a1a3b6b9`
` a1a4b4b10 ` a1a4b5b9 ` a1a4b6b8 ´ 2a2a3b3b11 ´ 2a2a4b2b11 ´ 2a2a4b3b10 ´ 2a3a4b1b11´
´ 2a3a4b2b10 ´ 2a3a4b3b9 ´ 4a6a8b2b3 ´ 4a7a8b1b3 ` 2a1a5b3b11 ` 2a1a6b2b11 ` 2a1a6b3b10`
` 2a1a7b1b11 ` 2a1a7b2b10 ` 2a1a7b3b9 ` 2a1a8b1b10 ` 2a1a8b2b9 ` 2a1a8b3b8qa21 (91)
c9 “´ p´a21b
210 ´ 2b9b11a
21 ` b11a1a3b5 ` a1a3b6b10 ` a1a4b5b10 ` b9a1a4b6 ` b4b11a1a4 ` 2b11a1a7b2`
` 2a1a7b3b10 ´ 2a1a7b5b6 ` 2a1a8b2b10 ` 2b9a1a8b3 ´ a1a8b25 ´ 2b4a1a8b6 ` 2b1b11a1a8`
` 2a6b11a1b3 ´ a6a1b26 ` a2b11a1b6 ´ b11a
23b3 ´ 2b11a3a4b2 ´ 2a3a4b3b10 ` a3a7b3b6 ` a3a8b2b6`
` a3a8b3b5 ´ a24b2b10 ´ b9a
24b3 ´ b1b11a
24 ` a4a7b2b6 ` a4a7b3b5 ` a4a8b2b5 ` b4a4a8b3`
` b1a4a8b6 ` a6a4b3b6 ´ 2a2b11a4b3 ´ a27b
23 ´ 4a7a8b2b3 ´ a
28b
22 ´ 2b1a
28b3 ´ 2a6a8b
23`
` a2a8b3b6qa21 (92)
c10 “´ p´2b10b11a21 ` b10a1a4b6 ` b5b11a1a4 ` 2b10a1a8b3 ´ 2b5a1a8b6 ` 2b2b11a1a8`
` 2a7b11a1b3 ´ a7a1b26 ` a3b11a1b6 ´ b10a
24b3 ´ b2b11a
24 ` b5a4a8b3 ` b2a4a8b6 ` a7a4b3b6´
´ 2a3b11a4b3 ´ 2b2a28b3 ´ 2a7a8b
23 ` a3a8b3b6qa
21 (93)
c11 “pa21b
211 ´ a1a4b6b11 ´ 2a1a8b3b11 ` a1a8b
26 ` a
24b3b11 ´ a4a8b3b6 ` a
28b
23qa
21 (94)
This is a 10th degree polynomial in z that can be solved by computing its real roots. Afterwards, we canback-substitute this value of z into the equations as specified in Sec. 2.2, and get the respective coordinates of thevanishing point on the mirror.
B. Appendix for the computation of direction for a given vanishing points
This section includes some useful information for the derivation of the proposed solution to compute directions,from a given vanishing points.
B.1. Coefficients of the polynomial equations Sec. 2.3
In this section we present the coefficients of the polynomial equations κ117rs2, s3s and κ218rs1, s2, s3s:
6

κ117 rs1, s2s “ a1s1 ` a2s2, (95)
where
a1 “ 4Cc3 ´ 4Cz1 ´B2c3 ` 4Az31 ` 4Bz21 ´ 3B2z1 ´ 4A2z31 ` 4BC
´ 4A2c3z21 ` 8ACz1 ´ 4Bc2y1 ´ 4Bc3z1 ´ 8ABz21 ´ 4Ac3z
21 ´ 8Ac2y1z1 ´ 4ABc3z1; (96)
a2 “ 4A2y1z21 ´ 4c2A
2z21 ` 4ABy1z1 ´ 4c2ABz1 ´ 4Ay1z21`
` 8c3Ay1z1 ` 4c2Az21 `B
2y1 ´ c2B2 ``4c3By1 ` 4c2Bz1 ` 8c2y
21 ´ 4Cy1 ´ 4Cc2, (97)
and:κ218 rs1, s2, s3s “ b1s
21 ` b2s
22 ` b3s2s3 ` b4s
23 (98)
with:
b1 “pBc2 ´By1 ´ 2c3y1 ` 2y1z1 ` 2Ac2z1 ´ 2Ay1z1q2 (99)
b2 “py21 ` z
21 ´ 1qpB ` 2c3 ´ 2z1 ` 2Az1q
2 (100)
b3 “´ 4c2py21 ` z
21 ´ 1qpB ` 2c3 ´ 2z1 ` 2Az1q (101)
b4 “4c22py21 ` z
21 ´ 1q (102)
B.2. Numerical Example
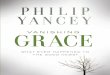
Figure B.1: Image of a hyperbolic catadiop-tric camera, with several parallel lines, andtheir respective vanishing points.
Although it was not mentioned in the paper, we ran somenumerical examples, to validate the proposed techniques. Forthat purpose, let us consider the example of a mirror defined byA “ ´0.15, B “ ´0.30 and C “ ´0.03 (hyperbolic), andtwo chessboard in the planes z “ 2 and y “ ´2 as shownin Fig. B.1, in which c2 “ ´0.5 and c3 “ ´0.8. By ob-serving the infinity line, we can pin-point a vanishing pointat ru, vs “ r748.1, 650.0s (in red). Using the techniques de-scribed in previous section, we will determine the direction thatgenerated this vanishing point.
By backward projecting the point into the mirror, we dis-cover its coordinates as being v “ rx, y, zs P Ω “
r´0.0670,´0.0463, 0.1155s. We then substitute it in equations(96) to (102) to obtain:
a1 “0.1003 (103)
a2 “0 (104)
b1 “0.0045 (105)
b2 “´ 0.0211 (106)
b3 “0.0195 (107)
b4 “´ 0.0045. (108)
By substituting in (25) of the main article, we obtain:
s2 “0 , (109)
7

and:
s3 “´ 0.7071 (110)
s1 “˘ 0.7071 . (111)
Hence, we discover that the 3D straight line in the world that generated the vanishing point v had the direc-tion s “ r´0.7071, 0,´0.7071s by considering the underlying camera system (we can ignore the solutions1 “ r´0.7071, 0, 0.7071s).
The other points shown in Fig. B.1, have the correspondent directions:
Red points: s “ r´0.7071, 0,´0.7071s
Yellow points: s “ r´0.7071, 0.7071, 0s
Cyan points: s “ r0.7071, 0.7071, 0s .
(112)
C. Appendix for computations related to Vanishing Curves
In this section we present some details regarding the results obtained for the parameterization of the vanishingcurves.
C.1. Computing a Curve at the Infinity
In this subsection, we present the full derivation of γprq as presented in Sec. 3 (Curves at the Infinity). Considerthe equation defined in Sec. 2.1 (planar constraint):
κ11ry, zsx` κ23ry, zs “ 0 (113)
We start by using s as defined in Eq. 28 of the main article in (113), and obtain a new equation:
κ222ry, z, αsx` κ323ry, z, αs “ 0 (114)
In addition, by replacing s as shown in Eq. 28 of the main article in κ9ry, zs, we obtain:
κ324 ry, z, αs “ 0. (115)
Since (115) is linear on α, one can use this constraint to define α as:
α “κ325ry,zs
κ326ry,zs. (116)
To conclude the definition of the curve at the infinity, we replace α, as derived in the previous equation, in (114),resulting in:
Γprq :“ κ220ry, zsx` κ321ry, zs “ 0 (117)
where the coefficients of κ220ry, zs and κ221ry, zs are defined in Appendix. C.2. As already presented in the mainpaper (Sec. 3), the curves in the infinity are projected onto the mirror as follows:
γprq :“
r “ rx, y, zs P R3 : Γprq ^ Ωprq “ 0(
. (118)
To be able to define a curve in the mirror, we solve Γprq for x and replace the result in Ωprq, defining:
κ627ry, zs “ 0, (119)
obtaining a different (though equally valid) definition of the curve as:
γprq “
rx, y, zs P R3 : κ627ry, zs “ 0^ x2 “ ´y2 ´Az2 ´Bz ` C(
. (120)
8

Table 1: Degrees of the polynomial equation that can be used to compute lines at the infinity, for specific catadiop-tric camera systems. We use D denotes the degree of the polynomial equation, and N the number of coefficients.The * in the table implies that one needs to consider a possibility of z “ 0.
Mirror Type D N
General 6 22General Axial (c2 “ 0) 6 18
Spherical Axial (A “ 1, B “ 0) 4 12Ellipsoid Axial (A “ 0, C “ 0) 4 9Conical Axial (B “ 0, C “ 0) 4* 9
Cylindrical Axial (A “ 0, B “ 0) 2 6
The reason why we could want this alternative definition would be to simplify the process of calculating theactual points that belong to the curve. The coefficient of the general expression for κ627ry, zs are presented inAppendix C.8.
Similarly to what happens in the estimation of the vanishing points, the complexity of the polynomial equationκ627ry, zs can be significantly reduced when considering specific camera configurations. In Tab. 1, we present atable with the variation of the degree of the polynomial equation κ627ry, zs for some specific cases.
C.2. Coefficients Curves at the Infinity
In this subsection we show the coefficients for the parameterization of Γprq (namely polynomial equationsκ220ry, zs and κ321ry, zs), that can define the curve at the infinity. We define:
κ220ry, zs “ a1y ` a2z2 ` a3z ` a4 (121)
where:a1 “8c2ps1,2s2,3 ´ s2,2s1,3q
a2 “´ ps1,2s2,3 ´ s2,2s1,3qp´4A2 ` 4Aq
a3 “p8Ac3 ` 4ABqps1,2s2,3 ´ s2,2s1,3q
a4 “ps1,2s2,3 ´ s2,2s1,3qpB2 ` 4c3B ´ 4Cq,
(122)
and:κ321ry, zs “ b1y
2 ` b2yz2 ` b3yz ` b4y ` b5z
3 ` b6z2 ` b7z ` b8 (123)
where:
b1 “8s2,1s1,3c2 ´ 8s1,1s2,3c2 (124)
b2 “4As1,1s2,3 ´ 4As2,1s1,3 ´ 4A2s1,1s2,3 ` 4A2s2,1s1,3 (125)
b3 “4ABs2,1s1,3 ´ 4ABs1,1s2,3 ` 8As1,1s2,2c2 ´ 8As2,1s1,2c2 ´ 8As1,1s2,3c3 ` 8As2,1s1,3c3 (126)
b4 “4Cs1,1s2,3 ´ 4Cs2,1s1,3 ´B2s1,1s2,3 `B
2s2,1s1,3 ` 4Bs1,1s2,2c2 ´ 4Bs2,1s1,2c2´
´ 4Bs1,1s2,3c3 ` 4Bs2,1s1,3c3 (127)
b5 “4As2,1s1,2 ´ 4As1,1s2,2 ` 4A2s1,1s2,2 ´ 4A2s2,1s1,2 (128)
9

b6 “4Bs2,1s1,2 ´ 4Bs1,1s2,2 ` 4A2s1,1s2,3c2 ´ 4A2s2,1s1,3c2 ` 4A2s1,1s2,2c3 ´ 4A2s2,1s1,2c3`
` 8ABs1,1s2,2 ´ 8ABs2,1s1,2 ´ 4As1,1s2,3c2 ` 4As2,1s1,3c2 ` 4As1,1s2,2c3 ´ 4As2,1s1,2c3 (129)
b7 “4Cs1,1s2,2 ´ 4Cs2,1s1,2 ` 3B2s1,1s2,2 ´ 3B2s2,1s1,2 ´ 8ACs1,1s2,2 ` 8ACs2,1s1,2´
´ 4Bs1,1s2,3c2 ` 4Bs2,1s1,3c2 ` 4Bs1,1s2,2c3 ´ 4Bs2,1s1,2c3 ` 4ABs1,1s2,3c2´
´ 4ABs2,1s1,3c2 ` 4ABs1,1s2,2c3 ´ 4ABs2,1s1,2c3 (130)
b8 “B2s1,1s2,3c2 ´B
2s2,1s1,3c2 `B2s1,1s2,2c3 ´B
2s2,1s1,2c3 ´ 4BCs1,1s2,2 ` 4BCs2,1s1,2`
` 4Cs1,1s2,3c2 ´ 4Cs2,1s1,3c2 ´ 4Cs1,1s2,2c3 ` 4Cs2,1s1,2c3. (131)
Specific cases for specific types of camera position and type of mirror are shown in Appendix. C.3 to C.7.
C.3. Coefficients of curves at the infinity: Axial case
In the axial case, the camera movement has to be restricted to motion in the uz axis, therefore, c2 “ 0:
κ220 ry, zs “ ps1,2s2,3 ´ s2,2s1,3qpa1z2 ` a2z ` a3q, (132)
with:
a1 “4A2 ´ 4A (133) a2 “8Ac3 ` 4AB (134) a3 “B2 ` 4c3B ´ 4C, (135)
and:κ321 ry, zs “ b1yz
2 ` b2yz ` b3y ` b4z3 ` b5z
2 ` b6z ` b7, (136)
with:
b1 “4As1,1s2,3 ´ 4As2,1s1,3 ´ 4A2s1,1s2,3 ` 4A2s2,1s1,3 (137)
b2 “4ABs2,1s1,3 ´ 4ABs1,1s2,3 ´ 8As1,1s2,3c3 ` 8As2,1s1,3c3 (138)
b3 “4Cs1,1s2,3 ´ 4Cs2,1s1,3 ´B2s1,1s2,3 `B
2s2,1s1,3 ´ 4Bs1,1s2,3c3 ` 4Bs2,1s1,3c3 (139)
b4 “4As2,1s1,2 ´ 4As1,1s2,2 ` 4A2s1,1s2,2 ´ 4A2s2,1s1,2 (140)
b5 “4Bs2,1s1,2 ´ 4Bs1,1s2,2 ` 4A2s1,1s2,2c3 ´ 4A2s2,1s1,2c3 ` 8ABs1,1s2,2 ´ 8ABs2,1s1,2`
` 4As1,1s2,2c3 ´ 4As2,1s1,2c3 (141)
b6 “4Cs1,1s2,2 ´ 4Cs2,1s1,2 ` 3B2s1,1s2,2 ´ 3B2s2,1s1,2 ´ 8ACs1,1s2,2 ` 8ACs2,1s1,2`
` 4Bs1,1s2,2c3 ´ 4Bs2,1s1,2c3 ` 4ABs1,1s2,2c3 ´ 4ABs2,1s1,2c3 (142)
b7 “B2s1,1s2,2c3 ´B
2s2,1s1,2c3 ´ 4BCs1,1s2,2 ` 4BCs2,1s1,2 ´ 4Cs1,1s2,2c3 ` 4Cs2,1s1,2c3. (143)
C.4. Coefficients of curves at the infinity: Spherical mirror (A “ 1, B “ 0)
Constraints for the spherical mirror are:
κ120 ry, zs “ ps1,2s2,3 ´ s2,2s1,3qpa1z ` a2q, (144)
with:
a1 “8c3 (145) a2 “´ 4C, (146)
and:κ221 ry, zs “ b1yz ` b2y ` b3z
2 ` b4z ` b5, (147)
with:
10

b1 “8s2,1s1,3c3 ´ 8s1,1s2,3c3 (148)
b2 “4Cs1,1s2,3 ´ 4Cs2,1s1,3 (149)
b3 “8s1,1s2,2c3 ´ 8s2,1s1,2c3 (150)
b4 “4Cs2,1s1,2 ´ 4Cs1,1s2,2 (151)
b5 “4Cs2,1s1,2c3 ´ 4Cs1,1s2,2c3. (152)
C.5. Coefficients of curves at the infinity: Ellipsoid mirror (A “ 0, C “ 0)
Constraints for the Ellipsoidal mirror are:
κ020 ry, zs “ ps1,2s2,3 ´ s2,2s1,3qa1, (153)
with:a1 “B
2 ` 4c3B, (154)
and:κ221 ry, zs “ b1y ` b2z
2 ` b3z ` b4, (155)
with:
b1 “B2s2,1s1,3 ´B
2s1,1s2,3 ´ 4Bs1,1s2,3c3 ` 4Bs2,1s1,3c3 (156)
b2 “4Bs2,1s1,2 ´ 4Bs1,1s2,2 (157)
b3 “3B2s1,1s2,2 ´ 3B2s2,1s1,2 ` 4Bs1,1s2,2c3 ´ 4Bs2,1s1,2c3 (158)
b4 “B2s1,1s2,2c3 ´B
2s2,1s1,2c3. (159)
C.6. Coefficients of curves at the infinity: Conical mirror (B “ 0, C “ 0)
Constraints for the conical mirror are:
κ220 ry, zs “ ps1,2s2,3 ´ s2,2s1,3qpa1z2 ` a2zq, (160)
with:
a1 “4A2 ´ 4A (161) a2 “8Ac3, (162)
and:κ321 ry, zs “ b1yz
2 ` b2yz ` b3z3 ` b4z
2, (163)
with:
b1 “4As1,1s2,3 ´ 4As2,1s1,3 ´ 4A2s1,1s2,3 ` 4A2s2,1s1,3 (164)
b2 “8As2,1s1,3c3 ´ 8As1,1s2,3c3 (165)
b3 “4As2,1s1,2 ´ 4As1,1s2,2 ` 4A2s1,1s2,2 ´ 4A2s2,1s1,2 (166)
b4 “4A2s1,1s2,2c3 ´ 4A2s2,1s1,2c3 ` 4As1,1s2,2c3 ´ 4As2,1s1,2c3. (167)
C.7. Coefficients of curves at the infinity: Cylindrical mirror (A “ 0, B “ 0)
Constraints for the cylindrical mirror are:
κ020 ry, zs “ ps1,2s2,3 ´ s2,2s1,3qa1, (168)
with:a1 “´ 4C, (169)
and:κ121 ry, zs “ b1y ` b2z ` b3 (170)
with:
11

b1 “4Cs1,1s2,3 ´ 4Cs2,1s1,3 (171)
b2 “4Cs1,1s2,2 ´ 4Cs2,1s1,2 (172)
b3 “4Cs2,1s1,2c3 ´ 4Cs1,1s2,2c3. (173)
C.8. Solving Curves at the Infinity
In the general case, from Sec. C.1, we obtain the following expression for κ627ry, zs:
κ627ry, zs “a1y4 ` a2y
3z2 ` a3y3z ` a4y
3 ` a5y2z4 ` a6y
2z3 ` a7y2z2 ` a8y
2z ` a9y2 ` a10yz
5`
` a11yz4 ` a12yz
3 ` a13yz2 ` a14yz ` a15y ` a16z
6 ` a17z5 ` a18z
4 ` a19z3 ` a20z
2`
` a21z ` a22
(174)
where:
a1 “64n21n23c
22 ` 64n22n
23c
22 (175)
a2 “´ 16n2n3c2p´4n2n3A2 ` 4n2n3Aq ´ 16n21n
23c2p´4A2 ` 4Aq (176)
a3 “16n2n3c2p8An23c2 ` 4ABn2n3 ` 8An2n3c3q ` 16n21n
23c2p8Ac3 ` 4ABq (177)
a4 “16n21n23c2pB
2 ` 4c3B ´ 4Cq ` 16n2n3c2pn2B2n3 ` 4c2Bn
23 ` 4n2c3Bn3 ´ 4Cn2n3q (178)
a5 “p´4n2n3A2 ` 4n2n3Aq
2 ` n21n23p´4A2 ` 4Aq2 (179)
a6 “´ 2p´4n2n3A2 ` 4n2n3Aqp8An
23c2 ` 4ABn2n3 ` 8An2n3c3q ´ 16n2n3c2p´4A2n23 ` 4An23q`
´ 2n21n23p8Ac3 ` 4ABqp´4A2 ` 4Aq (180)
a7 “p8An23c2 ` 4ABn2n3 ` 8An2n3c3q
2 ´ 2p´4n2n3A2 ` 4n2n3Aqpn2B
2n3 ` 4c2Bn23 ` 4n2c3Bn3`
´ 4Cn2n3q ´ n21n
23p2p´4A2 ` 4AqpB2 ` 4c3B ´ 4Cq ´ p8Ac3 ` 4ABq2q ` 64An21n
23c
22`
` 16n2n3c2p4A2n23c3 ´ 4Bn23 ` 8ABn23 ` 4An23c3 ´ 4A2n2n3c2 ` 4An2n3c2q (181)
a8 “2p8An23c2 ` 4ABn2n3 ` 8An2n3c3qpn2B2n3 ` 4c2Bn
23 ` 4n2c3Bn3 ´ 4Cn2n3q ` 2n21n
23p8Ac3`
` 4ABqpB2 ` 4c3B ´ 4Cq ` 64Bn21n23c
22 ` 16n2n3c2p4Cn
23 ` 3B2n23 ´ 8ACn23 ` 4Bn23c3`
` 4ABn23c3 ` 4Bn2n3c2 ´ 4ABn2n3c2q (182)
a9 “pn2B2n3 ` 4c2Bn
23 ` 4n2c3Bn3 ´ 4Cn2n3q
2 ` n21n23pB
2 ` 4c3B ´ 4Cq2 ´ 64Cn21n23c
22`
´ 16n2n3c2p´c3B2n23 ` n2c2B
2n3 ` 4CBn23 ` 4Cc3n23 ` 4Cn2c2n3q (183)
a10 “2p´4A2n23 ` 4An23qp´4n2n3A2 ` 4n2n3Aq (184)
a11 “´ 2p´4A2n23 ` 4An23qp8An23c2 ` 4ABn2n3 ` 8An2n3c3q ´ 2p´4n2n3A
2 ` 4n2n3Aqp4A2n23c3`
´ 4Bn23 ` 8ABn23 ` 4An23c3 ´ 4A2n2n3c2 ` 4An2n3c2q ´ 16An21n23c2p´4A2 ` 4Aq (185)
a12 “2p8An23c2 ` 4ABn2n3 ` 8An2n3c3qp4A2n23c3 ´ 4Bn23 ` 8ABn23 ` 4An23c3 ´ 4A2n2n3c2`
` 4An2n3c2q ´ 2p´4n2n3A2 ` 4n2n3Aqp4Cn
23 ` 3B2n23 ´ 8ACn23 ` 4Bn23c3 ` 4ABn23c3`
` 4Bn2n3c2 ´ 4ABn2n3c2q ´ 2p´4A2n23 ` 4An23qpn2B2n3 ` 4c2Bn
23 ` 4n2c3Bn3`
´ 4Cn2n3q ´ 16Bn21n23c2p´4A2 ` 4Aq ` 16An21n
23c2p8Ac3 ` 4ABq (186)
12

a13 “2p´4n2n3A2 ` 4n2n3Aqp´c3B
2n23 ` n2c2B2n3 ` 4CBn23 ` 4Cc3n
23 ` 4Cn2c2n3q ` 2p8An23c2`
` 4ABn2n3 ` 8An2n3c3qp4Cn23 ` 3B2n23 ´ 8ACn23 ` 4Bn23c3 ` 4ABn23c3 ` 4Bn2n3c2`
´ 4ABn2n3c2q ` 2pn2B2n3 ` 4c2Bn
23 ` 4n2c3Bn3 ´ 4Cn2n3qp4A
2n23c3 ´ 4Bn23 ` 8ABn23`
` 4An23c3 ´ 4A2n2n3c2 ` 4An2n3c2q ` 16An21n23c2pB
2 ` 4c3B ´ 4Cq ` 16Cn21n23c2p´4A2 ` 4Aq`
` 16Bn21n23c2p8Ac3 ` 4ABq (187)
a14 “2pn2B2n3 ` 4c2Bn
23 ` 4n2c3Bn3 ´ 4Cn2n3qp4Cn
23 ` 3B2n23 ´ 8ACn23 ` 4Bn23c3 ` 4ABn23c3`
` 4Bn2n3c2 ´ 4ABn2n3c2q ´ 2p8An23c2 ` 4ABn2n3 ` 8An2n3c3qp´c3B2n23 ` n2c2B
2n3`
` 4CBn23 ` 4Cc3n23 ` 4Cn2c2n3q ` 16Bn21n
23c2pB
2 ``4c3B ´ 4Cq ´ 16Cn21n23c2p8Ac3 ` 4ABq
(188)
a15 “´ 2pn2B2n3 ` 4c2Bn
23 ` 4n2c3Bn3 ´ 4Cn2n3qp´c3B
2n23 ` n2c2B2n3 ` 4CBn23`
` 4Cc3n23 ` 4Cn2c2n3q ´ 16Cn21n
23c2pB
2 ` 4c3B ´ 4Cq (189)
a16 “p´4A2n23 ` 4An23q2 `An21n
23p´4A2 ` 4Aq2 (190)
a17 “Bn21n
23p´4A2 ` 4Aq2 ´ 2p´4A2n23 ` 4An23qp4A
2n23c3 ´ 4Bn23 ` 8ABn23 ` 4An23c3`
´ 4A2n2n3c2 ` 4An2n3c2q ´ 2An21n23p8Ac3 ` 4ABqp´4A2 ` 4Aq (191)
a18 “p4A2n23c3 ´ 4Bn23 ` 8ABn23 ` 4An23c3 ´ 4A2n2n3c2 ` 4An2n3c2q
2 ´ 2p´4A2n23`
` 4An23qp4Cn23 ` 3B2n23 ´ 8ACn23 ` 4Bn23c3 ` 4ABn23c3 ` 4Bn2n3c2 ´ 4ABn2n3c2q`
´ Cn21n23p´4A2 ` 4Aq2 ´An21n
23p2p´4A2 ` 4AqpB2 ` 4c3B ´ 4Cq ´ p8Ac3 ` 4ABq2q`
´ 2Bn21n23p8Ac3 ` 4ABqp´4A2 ` 4Aq (192)
a19 “2p´4A2n23 ` 4An23qp´c3B2n23 ` n2c2B
2n3 ` 4CBn23 ` 4Cc3n23 ` 4Cn2c2n3q`
` 2p4A2n23c3 ´ 4Bn23 ` 8ABn23 ` 4An23c3 ´ 4A2n2n3c2 ` 4An2n3c2qp4Cn23 ` 3B2n23 ´ 8ACn23`
` 4Bn23c3 ` 4ABn23c3 ` 4Bn2n3c2 ´ 4ABn2n3c2q ´Bn21n
23p2p´4A2 ` 4AqpB2 ` 4c3B ´ 4Cq`
´ p8Ac3 ` 4ABq2q ` 2An21n23p8Ac3 ` 4ABqpB2 ` 4c3B ´ 4Cq ` 2Cn21n
23p8Ac3`
` 4ABqp´4A2 ` 4Aq (193)
a20 “p4Cn23 ` 3B2n23 ´ 8ACn23 ` 4Bn23c3 ` 4ABn23c3 ` 4Bn2n3c2 ´ 4ABn2n3c2q
2`
´ 2p´c3B2n23 ` n2c2B
2n3 ` 4CBn23 ` 4Cc3n23 ` 4Cn2c2n3qp4A
2n23c3 ´ 4Bn23 ` 8ABn23`
` 4An23c3 ´ 4A2n2n3c2 ` 4An2n3c2q `An21n
23pB
2 ` 4c3B ´ 4Cq2 ` Cn21n23p2p´4A2`
` 4AqpB2 ` 4c3B ´ 4Cq ´ p8Ac3 ` 4ABq2q ` 2Bn21n23p8Ac3 ` 4ABqpB2 ` 4c3B ´ 4Cq (194)
a21 “Bn21n
23pB
2 ` 4c3B ´ 4Cq2 ´ 2p´c3B2n23 ` n2c2B
2n3 ` 4CBn23 ` 4Cc3n23 ` 4Cn2c2n3qp4Cn
23`
` 3B2n23 ´ 8ACn23 ` 4Bn23c3 ` 4ABn23c3 ` 4Bn2n3c2 ´ 4ABn2n3c2q ´ 2Cn21n23p8Ac3`
` 4ABqpB2 ` 4c3B ´ 4Cq (195)
a22 “p´c3B2n23 ` n2c2B
2n3 ` 4CBn23 ` 4Cc3n23 ` 4Cn2c2n3q
2 ´ Cn21n23pB
2 ` 4c3B ´ 4Cq2 (196)
To conclude, we can obtain all the points in curve at the infinity by traversing either y or z in the range desiredand obtaining the other from κ627ry, zs “ 0. Afterwards, we can get the x for each individual point by using thefact that the point must be on the mirror surface (Ωprq “ 0).
13

D. Vanishing Points in Central Unified Spherical Model
In this section we propose a simpler solution to the analytical modeling of vanishing points in central cata-dioptric camera systems. For that purpose, we considering the central unified model proposed in [2, 1]. Next,we present the projection of 3D straight lines using the sphere model and present a solution to the modeling ofvanishing points.
D.1. Line Projection
Wen considering the central unified sphere model, 3D lines are projected into the sphere, by considering thatthe line is on a plane that constrains the line and the origin of the catadioptric system. Let us denote this plane as:
Π ““
l1 l2 l3 0‰T, (197)
This line is then projected onto the sphere in a circle (intersection between the plane Π and the unit sphere),which is the projected into the conic C in the canonical image plane1, using the implicit relation:
»
–
xy1
fi
fl
T »
–
l21p1´ ξ2q ´ l23ξ
2 l1l2p1´ ξ2q l1l3
l1l2p1´ ξ2q l22p1´ ξ
2q ´ l23ξ2 l2l3
l1l2 l2l3 l23
fi
fl
looooooooooooooooooooooooooooomooooooooooooooooooooooooooooon
C
»
–
xy1
fi
fl “ 0 ñ
e1x2 ` e2xy ` e3x` e4y
2 ` e5y ` e6 “ 0 (198)
for some coefficients ei (for i “ 1, . . . 6) and unknowns x and y.
D.2. Modeling Vanishing Points using the Central Unified Model
Now that we have defined the projection of the curves into the canonical image plane, the estimation of thevanishing points is given by the intersection points of the projection of two parallel 3D lines into the canonicalimage plane. By knowing two parallel lines, we have two 2-degree polynomial equations as shown in (198):
e1x2 ` e2xy ` e3x` e4y
2 ` e5y ` e6 “ 0, (199)
f1x2 ` f2xy ` f3x` f4y
2 ` f5y ` f6 “ 0. (200)
Then, the intersection of these two polynomial equations (which represents the intersection of two quadraticcurves) can be estimated by solving one of the functions in terms of x (lets say (199)) and substituting the re-sult in the second. After some simplifications, we get:
x “e3 ` e2y ˘
a
e22y2 ` 2e2e3y ` e23 ´ 4e1e4y2 ´ 4e1e5y ´ 4e1e6
´2e1, and (201)
g1y4 ` g2y
3 ` g3y2 ` g4y ` g5 “ 0. (202)
which can be solved by estimating the roots of the four degree (202) and back substituting the resulting y in (201).
E. Numerical Example of the Absolute Pose Estimation using Minimal Data
1Notice that this is an intermediate projection, it does not represent directly the image pixels.
14

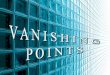
Figure E.2: Image of a spherical catadioptriccamera, with two parallel lines, their respec-tive vanishing points, and some points fromeach line marked in yellow.
Although it was not mention in the paper, we illustrate theprocedure used to estimate the camera pose (Sec. 4.2), byconsidering a numerical example. For this purpose, we con-sider the minimal data case, i.e. consider two know direc-tions in the world coordinate system: qd1 “ r0, 1, 0s, qd2 “
r0.7071, 0.7071, 0s and qd3 “ qd1 ˆ qd2 “ r0, 0, 1s, and the im-age shown in Fig. E.2. By using the correspondent vanishingpoints, we can determine d1, d2 and d3 to be:
d1 “r´0.7071, 0.7071, 0s (203)
d2 “r0, 1, 0s (204)
d3 “d1 ˆ d2 “ r0, 0,´0.7071s , (205)
and obtain:
R “
»
—
–
0.7071 ´0.7071 0
0.7071 0.7071 0
0 0 1
fi
ffi
fl
, (206)
using the Procrustes problem.Since we now know the rotation matrix R, we can use
it to estimate the translation parameters as explained also in Sec. 4.2. Considering that the two lines inFig. E.2 are represented in the 3D world by ql1 “ pqs1, qm1q “ p0, 1, 0, 1, 0, 0q and ql2 “ pqs2, qm2q “
p0.7071, 0.7071, 0, 0.7071,´0.7071, 2.8284q, we can obtain a linear system of three equations (using the threeyellow points in Fig. E.2, j “ 1, 2, 3), as shown in Sec. 4.2. Then, one can estimate the translation parameters as:
A “
»
–
´0.6587 ´0.6587 0.1965´0.5306 ´0.5306 0.1299´0.6676 0 ´0.7087
fi
fl ,b “
»
–
´0.1965´0.12990.7087
fi
fl . (207)
and:t “ A:b “
“
0 0 ´1‰T. (208)
Both estimated values of rotation and translation parameters correspond to the ones introduced in this simulatedenvironment.
References[1] J. P. Barreto and H. Araujo. Issues on the geometry of central catadioptric image formation. In IEEE Computer Vision
and Pattern Recognition (CVPR), volume 2, pages 422–427, 2001.[2] C. Geyer and K. Daniilidis. A unifying theory for central panoramic systems and practical implications. In European
Conf. Computer Vision (ECCV), pages 445–461, 2000.
15