Embed Size (px)
Citation preview

This content has been downloaded from IOPscience. Please scroll down to see the full text.
Download details:
IP Address: 142.58.129.109
This content was downloaded on 11/11/2014 at 22:41
Please note that terms and conditions apply.
Analysis of valveless micropumps with inertial effects
View the table of contents for this issue, or go to the journal homepage for more
2003 J. Micromech. Microeng. 13 390
(http://iopscience.iop.org/0960-1317/13/3/307)
Home Search Collections Journals About Contact us My IOPscience

INSTITUTE OF PHYSICS PUBLISHING JOURNAL OF MICROMECHANICS AND MICROENGINEERING
J. Micromech. Microeng. 13 (2003) 390–399 PII: S0960-1317(03)53076-5
Analysis of valveless micropumps withinertial effectsL S Pan, T Y Ng, X H Wu and H P Lee
Institute of High Performance Computing, 1 Science Park Road, # 01-01 The Capricorn,Singapore Science Park II Singapore 117528
Received 5 September 2002, in final form 22 January 2003Published 18 March 2003Online at stacks.iop.org/JMM/13/390
AbstractThrough flow field simplification, a set of differential equations governingthe fluid flow and fluid–membrane coupling are obtained for a valvelessmicropump. The dimensional analysis on the equations reveals that the ratioof the inertial force of the fluid to the viscous loss is dependent on the sizeratios among internal elements of the pump. For a micropump working athigh frequencies, these two forces possess the same order of magnitude, andthis phenomenon is independent of the excitation frequency and fluid type.For the liquid medium, the inertial force of the fluid is aroundO(102)–O(103) times as that of the plate membrane, and is also larger thanthe elastically deformed force of the plate when the excitation frequency isclose to the plate fundamental frequency. For the case where there is nopressure difference between the inlet and the outlet, an approximateanalytical solution is derived for the micropump under the action of anexternal sinusoidal excitation force. It shows that a phase shift lagging theexcitation force exists in the vibration response. For certain combinations ofmicropump size and fluid–solid density ratios, the phase shift can come to90◦ at a specific excitation frequency ω∗ due to the action of fluid inertia.Away from ω∗, the phase shift becomes smaller. The amplitude response ofcoupling vibration changes nonlinearly with the excitation frequency andreaches maximum at another frequency ω∗∗ �= ω∗. Due to the nonlinearityof viscous loss, resonance does not seem to occur at any frequency. Toobtain a larger average flux, the two loss coefficients of the nozzle should beminimized while their difference should be maximized. Under the action ofthe fluid inertia, there exists an optimal working frequency (equal to ω∗) atwhich the average flux is maximum. This optimal frequency is dependenton the size of the micropump, the material properties of the plate, the fluidproperties and has no relation with the excitation force. For the case where apressure difference between the inlet and the outlet exists, a constraintcondition between the excitation force and the pressure difference isobtained.
1. Introduction
Micropumps are required in many MEMS and BioMEMSapplications, such as chemical, medical, biomedical and othermicrofluidic systems [1, 2]. Several micropump designshave been developed and presented [3–9]. The valvelessmicropump has been the focus of a lot of research anddevelopment activities. As this type of micropump uses thediffuser/nozzle as flow directing elements, they require nointernal moving parts to control the fluid flow and thus possesshuge application potential in the micro scale regime.
To optimize these valveless diffuser/nozzle micropumps,a lot of research into their working characteristics andproperties have been conducted since the last decade. Someresearchers have investigated its characteristics from theelectro-mechanical coupling aspect to obtain reasonable inputelectrical signals [22]. Others approached it from thefluid mechanics viewpoint to reveal the flux properties ofthe micropump. Volker et al [10] studied the mechanicalproperties of thin films under load deformation. Gerlachet al [11] showed experimentally that the working parametersof these micropumps are highly dependent on the geometric
0960-1317/03/030390+10$30.00 © 2003 IOP Publishing Ltd Printed in the UK 390

Analysis of valveless micropumps with inertial effects
dimensions of the pump and the types of fluid used. Olssonet al [12, 13] and Ullmann [14] analysed the performancesof single and double chamber micropumps and discussedthe dependence of the flux on pressure difference betweenthe inlet and the outlet. Gerlach [15] discussed theapplication of the microdiffuser in micropumps as a dynamicpassive valve. Olsson et al [16] conducted numerical andexperimental studies on flat-walled diffuser elements forvalveless micropumps.
In a valveless membrane micropump, fluid flow is drivendue to the vibration of the thin plate and the fluid will also playsa key role in resistance to this vibration. The vibration of theplate and the fluid flow are thus always coupled. If the actionof the fluid is negligible, the membrane will vibrate at thesame frequency and phase as the excitation electrostatic force(termed excitation hereafter). However, the effect of fluid flowon the plate vibration is not negligible in actual application.The effect of fluid–membrane (plate) coupling is significantto the overall vibration characteristics and is thus one of theprimary concerns when investigating micropumps. Due to thenonlinearity of the fluid viscous loss, the vibration response ofthe plate tends to be nonlinear even though the deformation ofplate may be small.
Pan et al [17] investigated the mechanical properties offluid–membrane coupling for a valveless micropump, but theunsteadiness of the flow field within the micropump wasnot accounted for in their investigation. The works in [12–16, 18–20] show that when the working frequency of themicropump is sufficiently high, this unsteadiness (termed theinertial load acting on the plate) has significant influence onthe performance of the valveless micropumps. The questionsremain: how large is the fluid inertial force in comparison withother physical factors and is it still negligible relative to theviscous loss of fluid at low working frequencies?
In this paper, a nonlinear coupled fluid–membrane (plate)vibration model with consideration for the inertial effectsis first established to investigate the mechanical features ofvalveless micropumps. Dimensional analysis is hereaftercarried out to realize qualitatively the relative influence ofvarious physical factors on the vibration response of the plate.This is followed by the derivation of an approximate solutionfor the coupling vibration under the action of a harmonicexcitation force. Finally, the properties of the vibrationresponse and the average flux through the micropump areexamined in detail.
2. Coupled dynamical equations
Figure 1 shows the schematic of the cross section of a valvelessthin-plate micropump being considered here. For simplicity ofall subsequent discussions, the diffuser is assumed to be similarto the nozzle in geometrical structure except for a very smallportion close to the throat of the diffuser. Under the action of aperiodic electrostatic excitation force fe, the thin plate deformsperiodically thus pumping the fluid from the inlet to the outlet.The vibration of the plate can be described through the changeof its vertical displacement W with time in space. Neglectingstructural and geometric (large deformation) nonlinearities, Wsatisfies
Eh3
12(1 − ν2)∇4W + hρm
∂2W
∂t2= fe − P (1)
G
Pin Pout
DiffuserNozzle
P
(x, y)
z
o
Thin Plate
fe
OutletInlet
ChamberG
Figure 1. Schematic of the cross section of valveless micropump.
where E, ρm, h and ν are, respectively, elastic modulus, density,thickness and Poisson’s ratio of the plate, t is the time variable,∇4 is the two-dimensional double Laplacian operator and Pis the dynamic pressure exerted on the plate by the fluid. Itcan be seen from figure 1 that the pressure P below the platedepends on both the instantaneous velocity of the fluid andthe pressures (Pin and Pout) at the inlet and the outlet. As thefluid motion results primarily from the vibration of the platemembrane, the pressure P changes with the velocity (∂W/∂t)
and the displacement (W ). Equation (1) is thus a nonlinearpartial differential equation. A point worth noting here is thatthe pressure used here denotes the actual absolute pressureminus the environmental pressure.
From the viewpoint of solid mechanics, the pressureP must be known before solving equation (1). From theviewpoint of fluid mechanics, the pressure P can be obtainedonly after having the solution of Navier–Stokes equationsgoverning the fluid flow. However, it is necessary when solvingthe Navier–Stokes equations to know the displacement andvelocity of the plate or the pressure on it. This means that itis impossible to determine the pressure P before obtainingthe solutions of both equation (1) and the Navier–Stokesequations. In other words, the pressure P represents thecoupling between the plate vibration and the fluid flow. Inorder to investigate the vibration response of the system (plateand fluid) under the action of the excitation force, the strictestway is thus to solve both equation (1) and the Navier–Stokes(N–S) equations simultaneously. Evidently however, this isnot only very complicated but would also require extensivecomputational effort.
To avoid directly solving N–S equations numerically, auseful approach is first to set up an approximate physical modelof the flow field. Subsequently, from this model, attemptsare made to find some functional relationship between thepressure acting on the plate and the vibration velocity or thedisplacement. For this purpose, it is assumed that withinthe micropump:
• the pressures on the plate and the G–G plane are uniform,• the change of pressure in the chamber is mainly due to the
inertia of fluid and• the fluid is incompressible and contains no bubbles.
The last assumption above also implies that multi-phase flowis not considered.
From the first two assumptions and Bernoulli equation,the pressure difference between the plate and the G–G plane
391

L S Pan et al
can approximately be expressed as
P − PG ≈ ρ
∫∂V∂t
dr ≈ ρLdVm
dt(2)
where ρ is the fluid density, r is the position vector, L is theheight of the chamber and Vm is the average velocity definedas
Vm = d
dt
(1
Am
∫∫Am
W dx dy
)= dW̄ (t)
dt(3)
and Am is the area of the plate at rest, which is a × a for asquare plate with side length a. From the third assumption,the pressure difference through the diffuser and nozzle is
PG
ρ− Pin
ρ≈ Cn
Q2n
2A2 +∫ inlet
G∂V∂t
dr
PG
ρ− Pout
ρ≈ Cd
Q2d
2A2 +∫ outlet
G∂V∂t
dr
(4)
where, A is the throat section area of the diffuser or thenozzle, Qn and Qd the volumetric fluxes through the nozzleand diffuser, respectively, and are positive when the flow isin the z direction. According to equations (2) and (4), thepressure losses of fluid flow from the plate to the inlet and theoutlet can approximately be expressed as
P
ρ− Pint
ρ= Cin
Q2in
2A2+ L
dVm
dt+
∫ inlet
G
∂V∂t
dr (5.1)
and
P
ρ− Pout
ρ= Cd
Q2d
2A2+ L
dVm
dt+
∫ outlet
G
∂V∂t
dr (5.2)
where the coefficients Cn and Cd in equations (4–5) are,respectively
Cn = ζLH(Qn) − ζSH(−Qn)
Cd = ζSH(Qd) − ζLH(−Qd)
}. (6)
Here H(Q) is the step-function, i.e. H = 0 when Q < 0,
H = 1 otherwise. ζL and ζS(ζL > ζS) are the two pressure losscoefficients through the diffuser/nozzle, respectively. Theyare dependent on the structural shape of the diffuser/nozzle,such as length, shape of cross section as well as its changealong axis, the way of the joint with the chamber. It shouldbe noted that the loss coefficients in equation (6) are differentfrom those given in the engineering handbook. Besides thecoefficients in the handbook, the present coefficients alsoinclude the difference of kinetic energies at the inlet and theoutlet of the diffuser/nozzle.
Although it is impossible to find exactly the analyticalexpressions for the integrals in equations (5.1) and (5.2) dueto the complexity of the flow field, they can also be expressedapproximately as∫ inlet
G∂V∂t
dr ≈ dQndt
∫nozzle
dzAn(z)∫ outlet
G∂V∂t
dr ≈ dQddt
∫diffuser
dzAd(z)
}(7)
where An and Ad denote the section area of the nozzle anddiffuser, respectively.
For a square (or circular) section area, the integrals in theright side of equation (7) can be obtained as∫
diffuser
dz
Ad(z)=
∫nozzle
dz
An(z)= l√
AA1
where l is the length of the diffuser/nozzle and A1 is the areaof the diffuser at the outlet. Substituting equations (3) and (7)into equations (5.1) and (5.2), we have
P
ρ= Pin
ρ+ Cn
Q2n
2A2+ L
d2W̄
dt2+
l√AA1
dQn
dt(8)
P
ρ= Pout
ρ+ Cd
Q2d
2A2+ L
d2W̄
dt2+
l√AA1
dQd
dt. (9)
These two equations link the motion of plate with the pressuresoutside the micropump and the fluxes through the diffuser andnozzle.
For convenience of analysing and solving the couplingvibration in the following sections, the pressure P linkingthe displacement with the flux should be eliminated fromequation (1), through equations (8) and (9), one obtains
Eh3
12(1−ν2)∇4W + hρm
∂2W∂t2 + ρ
(L + lAm
2√
AA1
)d2W̄dt2
+ ρCn
4A2 Q2n + ρCd
4A2 Q2d = fe − �P
2 − Pin
(10)
l√AA1
(dQn
dt− dQd
dt
)+
Cn
2A2Q2
n − Cd
2A2Q2
d = �P
ρ(11)
where �P = Pout − Pin. In the process of deducing the abovetwo equations, the following continuity equation of fluid flowhas been used
AmVm = Qn + Qd. (12)
From the above three equations (10)–(12), three unknowns,W, Qn and Qd, can be determined provided that excitationforce and the pressures at the inlet and the outlet areknown. Thus equations (10)–(12) may be regarded as thedynamical equations of the fluid–membrane coupling systemin a micropump.
3. Qualitative analysis
Although many simplifications have been made on the fluidflow in/through the micropump, the coupled dynamicalequations (10)–(12), obtained above is still a set of nonlinear,partial differential-integral equations. It is almost impossibleto find the exact analytical solutions, and it will not beattempted here. Thus the main objective in the present work isto find an approximate solution for equations (10)–(12). It isimportant to carry out dimensional analysis on all terms in theequations before solving them approximately. This is becausefrom the dimensional analysis the contribution of every termin the equations to the solution can be known qualitatively. Forsimplicity and without loss of generality, the inlet pressure isassumed to be the environmental pressure, i.e., Pin = 0 in thefollowing discussions.
To conduct the dimensional analysis below, all variablesand operators in equations (10)–(12) are transformed intodimensionless ones with order of magnitude of O(1). Forthis purpose, we take
W = h
2W ′, ∇ = 6
a∇′,
∂
∂t= ω
∂
∂t ′(13)
where the symbols with prime stand for the correspondingdimensionless variables, ω is the excitation frequency.Neglecting geometrical and structural nonlinearities, the thin
392

Analysis of valveless micropumps with inertial effects
plate vibration is usually required to satisfy W � h/2 and h/2is thus chosen as the characteristic height of displacement.In forced vibration, the vibration response frequency shouldcorrespond to the excitation frequency. Hence 1/ω representsthe time characteristic of the forced vibration system. In thepresent case, although the mode shape of plate vibration maybe complex, it is always regarded as a certain superpositionof (finite or infinite) normal mode vibrations, and themode corresponding to the fundamental frequency ω1 =36hAm
√E
12ρm(1−ν2)is dominant. For the fundamental mode
vibration, the elastic force of the deformed plate can be writtenas Eh3∇4W1
12(1−ν2)= hρmω2
1W1. This implies Eh3∇4
12(1−ν2)∼ hρmω2
1∇′4
and we thus take ∇ = 6a∇′.
By using the dimensionless relationship, equation (13),equations (3) and (12), the average velocity of plate andthe fluxes through the nozzle and the diffuser may bewritten as
Vm = hω
2
dW̄ ′
dt ′, Qn = hAmω
2Q′
n, Qd = hAmω
2Q′
d.
(14)
Substituting equations (13) and (14) into equations (10)–(12),the set of coupled equations become dimensionless as follows:
∇′4W ′ + C1∂2W ′
∂t ′2+ C2
d2W̄ ′
dt ′2+ C3CnQ
′2n + C3CdQ
′2d
= f ′ − �P ′ (15)
C4
(dQ′
n
dt− dQ′
d
dt
)+ C3CnQ
′2n − C3CdQ
′2d = �P ′ (16)
dW̄ ′
dt ′= Q′
n + Q′d (17)
where
C1 = ω2
ω21, C2 = C1Rρ
(Lh
+ lh
Am
2√
AA1
)C3 = RρC1
8
(AmA
)2, C4 = C3
4lh
AAm
√AA1
(18)
and
f ′ = 2fe
h2ω21ρm
, �P ′ = �P
h2ω21ρm
, Rρ = ρ
ρm.
(19)
From the viewpoint of dimensional analysis, the influence ofeach physical factor on the characteristics of the vibrationresponses is thus completely determined by the magnitudeof coefficients (given in equations (18)) associated with thecorresponding terms on the left side of equations (15) and(16). The smaller the coefficients, the lesser will be thecontributing effect of the corresponding term. It can bededuced from equation (18) that the vibration characteristicsare mainly influenced by three parameters, which are namelythe frequency ratio (ω/ω1), density ratio (Rρ) and the sizeratios (Am/A,L/h, l/h and A/A1) among the internal partsof the micropump.
The ratio of C2 to C3 reflects the relative influence betweenthe inertial force of fluid (the third term in equation (15)) andits viscous loss. From equation (18), the ratio is
C2
C3= 8
(L
h+
l
h
Am
2√
AA1
)/(Am
A
)2
. (20)
This implies that the relative influence of the inertial forceto the viscous loss depends only on the relative sizes amongthe internal parts, rather than the excitation frequency. Henceif the geometric sizes of the internal elements are such thatthey make the ratio sufficiently small, the inertial force may benegligible compared with the viscous loss, regardless of howhigh the working frequency is. However, if the ratio is notsufficiently small, the inertial force cannot be neglected in thedynamic analysis. For example, suppose a micropump has thefollowing size features:
l = 1093 µm, L = 2l, h = 20 µm
Am/A = 100, A/A1 = 0.1
}(21)
then C2 ≈ 973.4C1Rρ , C3 = 1.25 × 103C1Rρ and C2/C3 =0.78. This shows that within such a micropump, the inertialforce is of the same order of magnitude as the pressure loss andthus can not neglected in the vibration analysis. This result isessentially in agreement with the observations in [12–16, 18–20]. The point worth emphasising here is that the importanceof inertial force does not have a close relationship with theexcitation (working) frequency.
Besides the fluid, the plate also has its own inertial forcein the coupled fluid–membrane vibration. The ratio of theseforces is
C2
C1=
(L
h+
l
h
Am
2√
AA1
)Rρ. (22)
Obviously, it also has no relationship with the excitationfrequency but is dependent on the density ratio Rρ of the fluidto the solid and also the size ratios among the internal parts.For the case of C2/C1 being large enough, the inertial forceof the plate vibration can be omitted relative to the actingforces of the fluid. Conversely, if C2/C1 is small enough, theinfluence of the fluid can be neglected. If the fluid mediumis a gas, for micropumps with the sizes similar to those ofequation (21), Rρ ≈ O(10−4)–O(10−3) and C2/C1 ≈O(0.1)–O(1). In this case, the two types of inertial forcesare almost in the same order of magnitude, and large errorsmay be incurred if any one of them is neglected in the dynamicanalysis of the system. For a liquid micropump with the samesize parameters, Rρ ≈ O(0.1)–O(1), C2/C1 ≈ O(102)–O(103), and the error resulting from neglecting the inertialforce of the plate is thus O(10−3)–O(10−2). Thus it is alsopossible to incur large errors if the inertial force of the fluid isneglected. Therefore irrespective of whether the micropumpoperates with gas or liquid medium, one has to be very carefulwhen neglecting the inertial force of fluid in the dynamicanalysis of the vibration response.
The first term in equation (15) represents the elastic forcedue to the deformation of the plate. Since this elastic force istaken as the reference force, its coefficient is 1. Hence eachcoefficient in equation (18) represents the ratio of thecorresponding acting force to the elastically deformed force ofthe thin plate. For instance, C2 can be regarded as the ratioof the fluid inertial force to the elastic force. Under thesize condition given by equation (21), C2 = 973.4Rρ(ω/ω1)
2.Thus for the case of a gas medium (Rρ ≈ O(10−4)–O(10−3)),if the excitation frequency is much lower than the fundamentalfrequency of the plate, i.e. ω/ω1 1, the value of C2 willthen be very small and the elastic force thus dominates in the
393

L S Pan et al
vibration response. In fact, if ω/ω1 < 0.01, then C2 < 10−4
and the inertial force of fluid is thus negligible relative to theelastic force. The discussion above has shown that the viscousloss possesses the same order of magnitude as the fluid inertialforce. For this case, therefore, the influence of the fluid maybe neglected in a gas–membrane coupling vibration valvelessmicropump system. However, C2 increases to the square of theincrease in excitation frequency ω, and the action of the fluidthus increases rapidly with ω. When the excitation frequencyis close to the fundamental frequency (ω ∼ ω1), C2 = O(1)
and the fluid inertial force is almost equal to the elastic forceof the plate, the gaseous influence will be significant at highworking frequencies.
In the case of liquid medium, 0.1 < Rρ < 1, for materialssuch as aluminium, silicon, steel, etc, for extremely low excitedfrequencies, ω/ω1 < 10−3, C2 is still very small and theinfluence of the fluid inertia may be omitted. With the increaseof excitation frequency to ω/ω1 ≈ 10−2, the fluid inertial forcebecomes almost of the same order of magnitude as the elasticforce. When the excitation frequency rises to ω/ω1 ≈ 1,C2 = O(102), it implies that for the coupled liquid–membranevibrations at high frequency, the elastic force of plate is muchsmaller than the fluid inertial force. C4 in equation (16)possesses a similar physical meaning to C2 and hence thediscussion on it is omitted here.
In the above dimensional analysis, some results are basedon certain structural size ratios characterized by equation (21).Obviously, altering the relative sizes of elements in themicropump will result in changes in the values of C2, C3
(or C4), and their ratios as well. The relative influencesamong the various physical factors will thus vary too. Detaileddiscussions on the effects of changes of the sizes of individualelements will not be provided in the present paper. The pointto note here is that it is possible to emphasise or reduce theperformance factor of a micropump simply by adjusting therelative sizes among the internal parts.
4. Approximate solution
The dimensional analysis in the previous section examinedcertain qualitative properties on the coupled fluid–membranevibration in a micropump. To investigate the vibrationresponse quantitatively, we need to solve equations (15)–(17).As this problem does not admit exact solutions due to theexistence of nonlinear terms, we will attempt here to attainaccurate approximate solutions. For simplicity and withoutlosing generality, the dimensionless excited force f ′ is taken asF sin(t ′), and the prime is omitted in subsequent discussions.
Physically, the displacement of the plate as well as thefluid flow is due to the action of two external forces, namely,the electrostatic force and the pressure difference betweenthe outlet and the inlet. If F = 0 and �P > 0, thenequations (15)–(17) are reduced to
Q0n = −Q0
d =√
�P
2C3ζL(23)
∇4W 0 = −�P. (24)
Equation (23) shows that the fluid flows in from the outletand out from the inlet under the action of pressure difference.
Equation (24) show the steady-state displacement of the plate,which can be expressed as
W 0 = −�P
∞∑j=1
(1
(ωj/ω1)2
∫∫Am
�j dx dy
)�j (25)
where �j is modal function at natural frequency ωj .Another special but important case is when �P = 0 and
F > 0. For this case, equations (15) and (16) become
∇4WF + C1∂2WF
∂t2+ C2
d2W̄F
dt2+ C3Cn
(QF
n
)2+ C3Cd
(QF
d
)2
= F sin t (26)
C4
(dQF
n
dt− dQF
d
dt
)+ C3Cn
(QF
n
)2 − C3Cd(QF
d
)2 = 0
(27)
while the continuity equation, equation (17) remainsunchanged. Similar to dealing with W 0, the function WF
is also expanded as a set of modal functions
WF ≈4∑
j=1
ηj (t)�j (x, y). (28)
Due to the symmetric features of the mode shapes, the meanis
W̄F = �̄1η1(t). (29)
Substituting equations (28) and (29) into equation (26) andthen taking the average as in equation (3), equation (26)becomes (note: ∇4�1 = �1 after undergoing dimensionlessprocess)
(C1 + C2)¨̄WF + W̄F + C3Cn
(QF
n
)2+ C3Cd
(QF
d
)2 = F sin t
(30)
where the overdot represents time derivative.To solve equation (30), it is first necessary to find the
relationship between the fluxes and the displacement. Fromcontinuity equation (17) and equation (27), the fluxes can beexpressed for the case of QF
d � 0, as
QFd = ζL
˙̄WF −√
ζSζL( ˙̄WF )2+(ζL−ζS)C4/C3(Q̇Fd −Q̇F
n )ζL−ζS
QFn = −ζS
˙̄WF +√
ζSζL( ˙̄WF )2+(ζL−ζS)C4/C3(Q̇Fd −Q̇F
n )ζL−ζS
(31)
and otherwise as
QFd = − ζS
˙̄WF +√
ζSζL( ˙̄WF )2−(ζL−ζS)C4/C3(Q̇Fd −Q̇F
n )ζL−ζS
QFn = ζL
˙̄WF +√
ζSζL( ˙̄WF )2−(ζL−ζS)C4/C3(Q̇Fd −Q̇F
n )ζL−ζS
. (32)
Through the application of equations (31) and (32), the twoterms representing the viscous fluid losses in equation (30) canbe expressed as
C3Cn(QF
n
)2+ C3Cd
(QF
d
)2 = 2C3ζSζL(ζL+ζS)| ˙̄WF | ˙̄WF
(ζL−ζS)2
+C4(ζL+ζS)(ζL−ζS)(Q̇F
d −Q̇Fn )
(ζL−ζS)2
− 4C3ζSζL˙̄WF
√ζSζL( ˙̄WF )2±(ζL−ζS)C4/C3(Q̇F
d −Q̇Fn )
(ζL−ζS)2
. (33)
where ‘±’ takes the minus form when QFd < 0. From the
orders of magnitude, the second term within the root signs
394

Analysis of valveless micropumps with inertial effects
in equations (31) and (32) is much smaller than the firstterm. Omitting this second term and taking the first-orderapproximation
(ζL − ζS)(Q̇F
d − Q̇Fn
) ≈ (√
ζL −√
ζS)2 ¨̄WF . (34)
Substituting equation (34) into equation (33), and expandingit in Taylor series fashion while neglecting the higher orderterms
C3Cn(QF
n
)2+ C3Cd
(QF
d
)2 ≈ βC3| ˙̄WF | ˙̄WF + α2C4¨̄WF
(35)
where α and β are the functions of the loss coefficients{α = (
√ζL − √
ζS)/(√
ζL +√
ζS)
β = 2ζSζL/(√
ζL +√
ζS)2.
(36)
Substitution of equation (35) into equation (30) finally resultsin
(C1 + C2 + α2C4)¨̄WF + βC3| ˙̄WF | ˙̄WF + W̄F = F sin t. (37)
Physically, the frequency of the plate vibration at steady-state should be that of the excitation frequency. In otherwords, the time parameter has to be integral multiples ofthe normalized excitation frequency. Also, the contributioncorresponding to the plate fundamental frequency is dominantin the overall response. Therefore in the present analysis,we will attempt to obtain a solution of the followingform:
W̄F = � sin(t − θ). (38)
Substituting equation (38) into equation (35) and usingthe Galerkin approach, � and θ can be determineduniquely as
θ = sin−1
F
/
√F 2 +
(3π(1 − C)2
16βC3
)2
+3π(1 − C)2
16βC3
(39a)
� = F√
6π/√√
(16βC3F)2 + 9π2(1 − C)4 + 3π(1 − C)2
(39b)
where C = C1 + C2 + α2C4. From the solution described byequations (38)–(39b), the average volumetric flux over a periodthrough a micropump can be calculated through equations (31)and (32). Expanding equations (31) and (32) in Taylor seriesfashion as in the case of equation (33), and retaining the firsttwo terms, the average flux can be written as
Q̃ = 1
2π
∫ 2π
0QF
d dt = α
π�. (40)
5. Discussion
5.1. Case of �P > 0 and F = 0
The solutions given by equations (23) and (25) show thatthere is constant fluid flow from the outlet to the inlet andthe thin plate has a stationary displacement, with the platebeing deformed upwards. This is simply because of thelarger internal pressure over the environmental pressure onthe upside of the plate as the inlet pressure is assumed to bethe environmental one. Apart from showing that the present
solutions are intuitively correct, this case itself does not haveany practical value for a micropump, and will not be discussedfurther.
5.2. Case of �P = 0 and F > 0
5.2.1. Vibration response. For a given excitation amplitude,equations (38)–(39) show that the characteristics of the thinplate vibration will depend on four parameters (or coefficients),namely: C1, C2, βC3 and α2C4, defined in equations (18) and(36). C1 and C2 represent the effect of the inertia of thin plateand fluid on the coupled vibration response and βC3 representsthe influence of viscous loss. Some of these details have beendiscussed in the qualitative analysis section. The parameterα2C4 originates from the inertial terms in equations (16) or (27)describing the pressure loss. This reflects a compound actiondue to the inertial force and the viscous loss. Hence it is clearthat the response of the coupled fluid–membrane vibrationmay be completely characterized through these parametersand their changes.
Equation (38) shows that the plate vibration has a phasedifference θ lagging the excitation force. This is due to theexistence of the parameter βC3. Without the viscous loss(i.e., β = 0), θ would be zero, regardless of the values ofC and C2. This can easily be inferred from equation (37)where the nonlinear resistance term disappears when β = 0,and equation (37) becomes linear, with the plate thus vibratingsynchronously with the excitation force. The viscous losstherefore is the source of the phase shift in the vibrationresponse. When C < 1, the phase difference θ increases withthe increase in the parameter βC3. This feature is similar tothat predicted in [17]. By setting C2 = C4 = 0 (i.e. neglectingthe inertial influence of the fluid) and C3 = C1, equation (39a)reduces to the phase shift formula presented in [17].
To have an intuitive understanding of the phase responsefeature after considering the influence of fluid inertia, figure 2has been presented based on equation (38) for the case of Rρ =0.4, (ζL, ζS) = (1.46, 1.05), Am/A = 100 and A/A1 = 0.1.The following three characteristics can be clearly observed.Firstly, for a given size ratio and excitation amplitude, thereexists a special excitation frequency ω∗(ω∗/ω1 < 1) at whichthe phase shift reaches 90◦. When ω < ω∗, the phase shiftincreases with the excitation frequency ω, while it decreaseswith the frequency when ω > ω∗. This differs from thatpredicted in [17], and it shows that the fluid inertia changesthe response feature of the phase shift with the excitationfrequency. Secondly, the special frequency ω∗ changes withthe length l of nozzle (or height L of the chamber) when othergeometries are fixed. The larger the l (or L) is, the smaller willbe ω∗. Thirdly, it can be found by comparing figures 2(a)–(c)that the variation of the excitation amplitude F leads to changesin the phase response curve but not the special frequency ω∗
at fixed l or L. Apart from the effects on the phase response,the significance of the special frequency ω∗ on the averageflux will be presented in the following section. Hence it isimportant to obtain the analytical expression of ω∗. For thispurpose, we set C − 1 = 0 and obtain
ω∗ = ω1
/√1 + Rρ
[L
h+
(1 + α2)lAm
2h√
AA1
](41)
395

L S Pan et al
1
1
2
2
3
3
4
4
5
5
10-2 10-1 100
10
20
30
40
50
60
70
80
90
L/h = 20L/h = 40L/h = 60L/h = 80L/h = 100
12345
F = 2, l =L/2
ω/ω1
θ
(a)
1
1
1
2
2
2
3
3
3
4
4
45
5
5
10-2 10-1 100
10
20
30
40
50
60
70
80
90
L/h = 20L/h = 40L/h = 60L/h = 80L/h = 100
12345
F = 1, l =L/2
ω /ω1
θ
(b)
1
1
12
2
2
3
3
3
4
4
4
5
5
5
10-2 10-1 1000
10
20
30
40
50
60
70
80
90
L /h = 20L /h = 40L /h = 60L /h = 80L /h = 100
12345
F = 0.5, l = L /2
ω /ω1
θ
(c)
Figure 2. Variation of phase angle with excitation frequency atvarious excitation amplitudes and size ratios.
In equation (39a), C represents the total inertial coefficientof fluid and plate. It consists of three parts, C1, C2 and α2C4,
which are all positive. This means that the fluid inside themicropump always vibrates in phase with the plate. This isintuitively correct as one would expect that under the action ofa steady excitation force, the plate and fluid would be coupledas a whole in the vibration, even though a certain quantity offluid enters from the inlet, and a corresponding amount leavesvia the outlet.
Besides the phase shift, the change in the vibrationamplitude with the various parameters is also anothercharacteristic of the coupled vibration. It can be seen fromequation (39b) that if the fluid inertia is neglected, then C =C3 = C1, and equation (39b) is reduced to the amplituderesponse predicted in [17]. The work in [17] can thus be treatedas a special case of the present work. In neglecting the viscousloss of the fluid, the equation is reduced to � = F/(1 − C)
and � → ∞ when ω → ω∗. On one hand, this indicatesthat if viscous loss is very small in comparison with the fluidinertial force, and the response amplitude will be quitelarge when excitation frequency is near ω∗, i.e., resonancephenomenon occurs. In other words, the fluid inertial forcecauses a reduction in the fundamental frequency of the plate,from ω1 to ω∗. On the other hand, the viscous loss offluid plays a key role in preventing the plate from achievingresonance.
Figure 3 shows the variation of response amplitude withthe excitation frequency at various excitation amplitudes andsize ratios. With the increase of the excitation in the range ofω/ω1 < 10−2, the response amplitudes are almost not changedand equal to the excitation amplitude F for the various sizes.Compared to figure 2, the responding phase angle also has thesame property. This means that when the excitation frequencyis in this range, the inertial influence of the solid and the actionof the fluid can be neglected. As the excitation frequencyincreases continuously, the influences of the nonlinear viscousloss and inertia of fluid become larger and larger. The responseamplitudes thus rise first and then decrease nonlinearly forthree excitation amplitudes. This nonlinear effect increaseswith the size ratio L/h. Obviously, for the given sizeand excitation amplitude, there is another special excitationfrequency ω∗∗ at which the response amplitude is maximum.It is easy to verify ω∗∗ �= ω∗. From the point of rupture, it isnecessary to avoid the excitation frequency near ω∗∗. It canalso be seen from figures 3(a)–(c) that the response amplitudeincreases with the excitation amplitude for the fixed size andexcitation frequency.
5.2.2. Average flux. The average volumetric flux over aperiod is an important index for determining the performanceof a micropump. In equation (40), (hAmω/2) is taken asthe characteristic quantity of the average flux Q̃. To betterreflect the change of average flux with excitation frequency,ω1 must be used to replace ω in this characteristic quantity.From equations (39) and (40), the average flux Q after using(hAmω1/2) as the characteristic quantity is
Q = αF
π
√6πC1√
(16βC3F)2 + 9π2(1 − C)4 + 3π(1 − C)2.
(42)
This relation displays the following features for the averageflux.
396

Analysis of valveless micropumps with inertial effects
1
1
1
2
2
2
3
3
3
4
4
4
4
55
5
5
10-2 10-1 100
0.5
1
1.5
2
2.5
L/ h = 20L/ h = 40L/ h = 60L/ h = 80L/ h = 100
12345
F = 2, l =L/2
Π
ω/ω1
(a)
1
1
2
2
3
3
4
4
4
5
5
510-2 10-1 100
0.5
1
1.5
2
2.5L/ h = 20L/ h = 40L/ h = 60L/ h = 80L/ h = 100
12345
F = 1, l =L/2
Π
ω/ω1
(b)
12
2
3
3
4
4
5
5
10-2 10-1 100
0.5
1
1.5
2
2.5
L/h = 20L/h = 40L/h = 60L/h = 80L/h = 100
12345
F = 0.5, l =L/2
Π
ω/ω1
(c)
Figure 3. Variation of response amplitude with excitationfrequency at various excitation amplitudes and size ratios.
Firstly, the average flux depends not only on the twoviscous loss coefficients but also their difference (
√ζL −√
ζS),
i.e., β and α. Since ∂Q/∂β is always negative, the largerthe two loss coefficients ζL and ζS, the smaller will be Q.This is in agreement with physical intuition as higher losscoefficients give rise to higher energy losses, and the effectiveoutput efficiency of the micropump falls. On the other hand,due to ∂Q/∂α ∝ (1 − C)α, the sign of ∂Q/∂α depends on(1−C), i.e., the difference between the elastic force coefficientof the plate and the total inertial coefficient (note: the elasticforce coefficient is taken as 1). Hence when the total inertialcoefficient is less than the elastic one (C < 1), Q increases withα or (
√ζL − √
ζS), otherwise, it decreases with (√
ζL − √ζS).
To obtain a larger flux, the difference between the two losscoefficients should thus be as large as possible for micropumpsworking at low frequencies. Conversely, for high frequencies,this difference should be as small as possible.
Secondly, the response of average flux to the excitedamplitude F is similar to that of �. Hence it is not necessaryto carry out a detailed discussion for this case.
Thirdly, in neglecting the influence of fluid inertia, i.e.,C = C1 = (ω/ω1)
2, equation (42) is reduced to that predictedin [17], i.e., Q rises monotonically with ω/ω1 and reachesits maximum at ω/ω1 = 1. When the influence of the fluidinertial force is considered, figure 4 shows that the changes ofQ with ω/ω1 is not monotonic. The maximum Q value point islocated not at ω/ω1 = 1, but at some point where ω/ω1 < 1.This maximum value point varies with the size ratio. Thefrequency at which the average flux reaches its maximum canbe regarded as the optimal working frequency of a micropump.This optimal frequency can be obtained analytically by setting∂Q/∂(ω/ω1) = 0. According to equation (42), it is found thatthe optimum working frequency satisfies
C − 1 = 0 (43)
i.e., at ω = ω∗. It means that the optimum workingfrequency coincides with the special frequency expressed byequation (41). Hence equation (41) is of much significance inboth micropump design and application.
Figure 4 also shows that there exists a frequency regionnear the optimum frequency, in which the change of Q isminimal, although the width of this region narrows with theincrease of size ratio. Observing figures 4(a)–(c), it is alsofound that the region increases with the excitation amplitudeF. The importance of this property can be understood fromthe following aspects. Firstly, equation (41) is obtainedthrough an approximate, albeit very accurate, analysis, andthe frequency determined may thus not be the exact optimumworking frequency. Secondly, even if equation (41) is able toprovide the exact actual optimum frequency, it is not alwayspossible to accurately measure the geometrical sizes of theinternal elements, which are necessary for calculating thisfrequency. However, this property indicates that even if thereis a certain discrepancy between the chosen ω from the actualoptimum frequency, the average flux obtained will not be toofar off the maximum flux, if we design the micropump to bein this special region.
Intuitively, maximum volumetric flux should occur atthe same time with maximum response amplitude. But inthe discussion on amplitude response, it has been shownthat the optimal working frequency ω∗ is not equal to thefrequency ω∗∗ of maximum response amplitude. The result is
397

L S Pan et al
1
1
2
2
3
3
4
4
5
5
10-2 10-1 100
0.05
0.1
0.15
0.2
L/h = 20L/h = 40L/h = 60L/h = 80L/h = 100
12345
F = 0.5, l =L/2
ω/ω1
Q×1
00
(c)
1
1
2
2
3
3
4
4
5
5
10-2 10-1 100
0.05
0.1
0.15
0.2
L/h = 20L/h = 40L/h = 60L/h = 80L/h = 100
12345
F = 1, l =L/2
ω/ω1
Q×1
00
(b)
1
1
2
2
3
3
4
4
5
5
10-2 10-1 100
0.05
0.1
0.15
0.2
L/h = 20L/h = 40L/h = 60L/h = 80L/h = 100
12345
F = 2, l =L/2
ω/ω1
Q×1
00
(a)
Figure 4. Variation of dimensionless average flux Q with excitationfrequency at various excitation amplitudes and size ratios. Here(hAmω1/2) is taken as the characteristic quantity of the flux.
thus different from the intuition. This finding has importantpractical meaning. It is because if ω∗ is considered to equalω∗∗, one occasionally has to give up obtaining the maximum
500
400
300
200
100
-10010 100
f [Hz]
Q6
[µl/
min
]
1000 10000 10000
0
experim.
stat. model
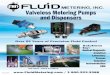
Figure 5. Pump rate versus frequency (medium: water). It is acopy from T Gerlach and H Wurmus [11].
flux of a micopump in order to avoid the rupture caused bylarge response amplitude.
5.3. Case of �P > 0 and F > 0
For this case, it is very difficult to obtain an approximatesolution for equations (15)–(17), due to the nonlinear couplingbetween them. But the superposition of the two solutions inthe above cases may be treated as an approximation to thesolution of the practical case. Although such a treatment isquite coarse, certain valuable information may be extractedas a result. For example, to ensure a positive average flux,according to equations (23) and (42), the following inequalitymust be satisfied
6πC1F2√
(16βC3F)2 + 9π2(1 − C)4 + 3π(1 − C)2>
�P
2C3ζL.
(44)
This inequality can be regarded as a constraint conditionbetween the excitation amplitude and frequency under a givenpressure environment.
5.4. Qualitative verification
Based on the present theoretical model and its approximatesolution, some properties of fluid–solid coupling vibrationresponse and average flux have been obtained. Their validityshould be verified through comparison with experimental data.Since no experiment on the fluid–solid coupling vibration ofthe micropump has been reported, the validity can be checkedonly through comparison between fluxes. Figure 5 showsa set of experimental data on the variation of average fluxwith excitation frequency, which is provided by Gerlach andWurmus [11]. As enough geometrical sizes are not givenin their paper, the first natural frequency ω1 and size rationeeded in the present paper cannot be calculated and hence aqualitative comparison is merely made here.
It can be found from the comparison of figure 4 withfigure 5 that the properties of the average flux shown byexperimental data is similar to that derived from the presentapproximate solution. In fact, figure 5 shows that with the
398

Analysis of valveless micropumps with inertial effects
increase of the excitation frequency, the flux increases firstand then decreases. Obviously, there exists such a workingfrequency ω∗ at which the flux reaches its maximum. Ina small range near ω∗, the change of the flux is very slow,while outside the range the flux falls very fast. These are inagreement with the present prediction.
6. Concluding remarks
Through flow field simplification, a set of partial differentialequations governing the fluid flow and fluid–membranecoupled vibration have been obtained. Subsequently, adimensional analysis reveals that the coupled vibrationresponse is dependent on the ratios between the excitationand fundamental frequencies, the fluid and solid densities, andamong the sizes of the internal elements. For a valvelessmicropump, the inertial force and viscous loss of the fluidare of the same order of magnitude, and independent of theexcitation frequency and the type of fluid. This indicates thatneither can be neglected in the coupled dynamical analysis.For a gaseous medium, the ratio of the inertial force of fluidto that of the plate is almost O(1), while for a liquid medium,this ratio is about O(102)–O(103). Hence the inertial forceof the plate is negligible for the liquid case. In comparisonwith the elastic force of the plate, the inertial force of the gasis very small, while the inertial force of the liquid is largerin the case of high excitation frequency (close to the naturalfrequency). Therefore liquids play a critical role in the coupledvibration.
An approximate solution under the action of a harmonicexcitation force has been found for the case of zero pressuredifference between the inlet and the outlet. It showed a phaselag in the vibration response, caused by the viscous loss, andis further dependent on other physical factors. For a given sizeand density ratio, the phase angle may reach 90◦ at a specialexcited frequency ω∗, which is lower than the fundamentalfrequency of the plate. The larger the discrepancy betweenthe excitation frequency and ω∗, the smaller will be the phaselag. This phenomenon is due to the action of the fluid inertialforce. The amplitude of coupled vibration response changesnonlinearly with the excitation frequency and no resonanceoccurs. Similar to the phase angle, there also exists a specialω∗∗ �= ω∗ at which the response amplitude is maximum. Inorder to obtain the optimum average flux, the approximatesolution showed that the two loss coefficients of the nozzleshould be as small as possible, while the difference betweenthem should be as large as possible. Under the action offluid inertia, it is found that there exists an optimal workingfrequency (equal to ω∗) at which the average flux is maximum.The optimal frequency depends on the relative sizes of theinternal elements and the material properties of the plate andthe fluid, and has no relationship with the excitation force.In addition, there is a frequency region near ω∗, in whichthe change of the average flux with the excitation frequency isminimal. These properties are very useful for the designers andusers of valveless micropumps. When a pressure differenceexists between the inlet and the outlet, a constraint conditionbetween the excitation force and the pressure difference isobtained.
References
[1] Gravesen P, Branebjerg J and Jensen O S 1993Microfluidics—a review J. Micromech. Microeng. 3165–82
[2] Ho C M and Tai Y C 1998 Micro-electro-mechanical systems(MEMS) and fluid flows Annu. Rev. Fluid Mech. 30579–612
[3] Smits J G 1990 Piezoelectric micropump with three valvesworking peri-statically Sensors Actuators A 15 153
[4] van Lintel H T G, van de Pol F C M and Bouwstra S 1998 Apiezoelectric micropump based on micromachining ofsilicon Sensors Actuators A 15 153–67
[5] van de Pol F C M, Breedveld P C and Fuitman J H J 1990Bond-graph modelling of an electro-thermal-pneumaticmicropump Technical Digest MME 90 (Berlin) pp 19–24
[6] Zengerle R, Richter A and Sandmaier H 1992 A micromembrane pump with electrostatic actuation Proc. MEMS 92ed W Beneeke and H C Petzold (Germany: Tranvemunde)pp 19–24
[7] Gass V, van der Schoot B H, Jeanneret S and de Rooij N F1993 Integrated flow-regulated silicon mcriopumpTechnical Digest IEEE Transducers 93 (New York: IEEE)pp 1048–51
[8] Rapp R, Bley P, Menz W and Schomburg W K 1993Micropump fabricated with the LIGA process Proc. MEMS93 (Fort Lauderdale, FL, 1993) (New York: IEEE)pp 123–26
[9] Stemme E and Stemme G 1993 A novel piezoelectricvalve-less fluid pump Technical Digest IEEE Transducers93 (Yokohama, Japan, 1993) (New York: IEEE) pp 110–13
[10] Volker Z, Oliver P, Ulrich M, Jurg S and Henry B 1998Mechanical properties of thin films from load deflection oflong clamped plates IEEE/ASME J. Microelectromech.Syst. 7 320–8
[11] Gerlach T and Wurmus H 1995 Working principle andperformance of the dynamic micropump Sensors ActuatorsA 50 135–40
[12] Olsson A, Stemme G and Stemme E 1999 A numerical designstudy of the valveless diffuser pump using a lumped-massmodel J. Micromech. Microeng. 9 34–44
[13] Olsson A, Enoksson P, Stemme G and Stemme E 1997Micromachined flat-walled valve diffuser pumpsIEEE/ASME J. Microelectromech. Syst. 6 161–6
[14] Ullmann A 1998 The piezoelectric valve-lesspump-performance enhancement analysis SensorsActuators A 69 97–105
[15] Gerlach T 1998 Microdiffusers as dynamic passive valves formicropump applications Sensors Actuators A 69 181–91
[16] Olsson A, Stemme G and Stemme E 2000 Numerical andexperimental studies of flat-walled diffuser elements forvalve-less micropumps Sensors Actuators A 84 165–75
[17] Pan L S, Ng T Y, Liu G R, Lam K Y and Jiang T Y 2001Analytical solutions for the dynamic analysis of a valvelessmicropump—a fluid–membrane coupling study SensorsActuators A 93 173–81
[18] Bardell R L, Sharma N R, Forster F K, Afromowitz M A andPenney R J 1997 Designing and high-performancemicro-pumps based on no-moving-parts valvesMicroelectromechanical Systems (MEMS) ASME 1997DSC-vol 62/HTD-vol 354 pp 47–53
[19] Olsson A, Stemme G and Stemme E 1995 A valve-less planarfluid pump with two pump chambers Sensors Actuators A47 549–56
[20] Zengerle R and Richter M 1997 Simulation of microfluidsystems J. Micromech. Microeng. 4 161–6
[21] Bourrouina T and Grandchamp J P 1996 Modelingmicropumps with electrical equivalent networksJ. Micromech. Microeng. 6 398–404
[22] Jiang T Y, Ng T Y and Lam K Y 2000 Optimzation of apiezoelectric ceramic actuator Sensors Actuators A 8481–94
399