Embed Size (px)
Citation preview

ANALYSIS OF AE SOURCE LOCATION PRECISION FOR GENERAL SENSOR CONFIGURATIONS
Milan CHLADA1, Petr GALIS2, Zdenek PREVOROVSKY1
1 NDT Laboratory, Institute of Thermomechanics AS CR, v.v.i.,
Prague, Czech Republic; 2 Department of Mathematics, FNSPE,
Czech Technical University in Prague, Czech Republic.
Abstract:
Proper sensor placement is the crucial step and a premise for precise AE source location estimate. Optimal sensor configuration in cases of complex structure shapes is one of AE expert challenges. It leads to numerical analysis of relations between the signal arrival chronology and the coordinates of emission sources. Using the algorithm for finding the shortest ways in discretely defined bodies it is possible to design three parallel tools how to evaluate problematic areas, namely the location sensitivity, similarity and ambiguity maps, available even for non-continuous or anisotropic materials. Analogically to Global Positioning System, location of AE sources meets the geometrical dilution of precision (GDOP) phenomena. Similarly to GDOP parameter, recently introduced sensitivity map shows critical regions characterized by strong sensitivity of location results to signal arrival time changes or errors. Remaining two mentioned methods illustrate the topology of arrival time differences space and possible ambiguities of source location. To check the numerical forecast of location capabilities of given sensor configuration, theoretical results were reviewed with the data measured during real experiment.
1. Introduction
To ensure reliable AE source location results in particular structure part, it is needed to choose proper configuration of sensors, or, conversely, take into account only AE events coming from “stable” region defined by sensor placement. Improper positions of receivers towards the source can generally disable location methods using the signal arrival delays. Similar problem is solved also in the field of satellite navigation. In order to predict the accuracy of location results, the geometry of the setup (i.e. known position of satellites and the estimated position of GPS signal receiver) is exploited. The dimensionless parameter modelling expected location accuracy is called Geometric Dilution of Precision (GDOP) [1, 2]. The idea is to state how the measurement errors affect the final location estimation. If small changes in measured data (time delays) are not resulting in large location changes, the solution is not too sensitive to measurement errors.
(1)
In general the GDOP solely depends on the arrangement of sensors and the emitter position. GDOP serves as a measure of the location errors magnification derived from perturbations in arrival times. In areas of great GDOP values, especially outside the convex hull of the sensor array, it is not recommended to locate AE sources, due to expected high location uncertainty and errors.
1
Mor
e in
fo a
bout
this
art
icle
: ht
tp://
ww
w.n
dt.n
et/?
id=
2360
1

Another indicator of expected location precision is the Location Uncertainty (LUCY) parameter [3]. It describes how well a calculated source position fits the measured arrival-time-differences and can be used as a filter criterion to separate the sources with poor location accuracy.
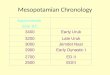
All above mentioned approaches are theoretically ready to be applied for general body shapes, however, their usage is mostly restricted by essential knowledge of shortest (direct) paths between the source and sensors. Following chapters deal with forecasting of location possibilities and precision by application of numerical analysis of particular sensor configurations. The methodology is formulated for discretely defined bodies and it is demonstrated for real complex structure, namely the steam storage vessel with embedded pressure and temperature sensors, waveguides and supporting legs (see photos in fig.1). The goal is to predict the accuracy of AE source location for selected group of sensors. The “numerical forecast” is then reviewed with nine sets of pencil-lead breaks (PLBs) realized in nine mesh points on the main body surface.
Fig.1: Experimental body.
2. Arrival-time chronology parametrization
The mostly applied approach to AE source location is the analysis of time chronology (delays), in which the elastic wave arrives at each sensor. However, the arrival-time information can be furthermore parametrized by various ways. Instead of commonly used time-differences, let's demonstrate advice methodology of location precision analysis for arrival-time profiles. For group of N sensors, the arrival-time profile (ATP) is a vector of numbers pi defined as:
(2)
where Ti is arrival time period (signal propagation time from source to sensor i) , ts the AE source inception time, ti signal arrival time and T is a normalization period representing the length of time interval which AE signal needs to pass between two appropriately selected points. Since no AE analyser measures the arrival time periods Ti before precise AE source location is done, the left part of equation (2) can be considered only when computing the database of typical arrival-time profiles in points sufficiently covering the body. Arrival-time
2
pi =T i −
1
N ∑j=1
N
T j
T=t i− tS − 1
N ∑j=1
N
(t j − t S )
T=t i −
1
N ∑j=1
N
t j
T

profiles are independent on elastic wave velocity and structure scale changes and these parameters can be calculated by real arrival times ti or time periods Ti evaluated on a physical or numerical model. Normalization period T serves as a calibration time, which must be measured on the real structure and computed for corresponding points on the model body. Finally, arrival-time profile P=(p1,..., pN) represents a kind of arrival-chronology relativizing (see fig.2).
Fig.2: Relativisation of arrival-times by arrival-time profile.
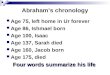
For further computations let's consider the sensor configurations outgoing from a body shape and sensor placement illustrated in fig.3. Experimental setup includes also the positions of nine PLBs performed within the most complex part of steam storage vessel. All computations are done in 2D on unwrapped main body surface (see right part of fig.3).
Fig.3: Experimental setup scheme.
3
sensors on waveguides
S2
S1
S3S3
S6S6p1
p2
p3
p4
p5
p6
p7
p8
p9
S1
p1p2p3
p6 p5 p4
p7p8p9
S2
S3
S4
S5
S6
on w
aveg
uid
e
on w
aveg
uid
e
on supporting leg
on supporting leg
UNWRAPPED BODY SURFACE
x [cm]
y [cm
]
x [cm]
y [cm]
z [cm
]
S1
S2
S4
S3
t1
t2
tS t
4 t
3
T4
T3
T2
T1
S1
S2
S4
S3
p2
ARRIVAL TIMES ARRIVAL TIME PROFILE
p1
p4
p3
-1 0 1 [s]
+
+
+
+

3. Shortest ways finding in discrete bodies
For reliable results of AE source location it is needed to trace elastic wave while propagating from initiation point to sensor and estimate the distance between them. The choice of most suitable method for solving the problem depends largely on the kind or form of the body shape definition. It can be given as a photograph, as 2D or 3D computer sketch, otherwise as a mathematical model etc.
Due to it's simple implementation and sufficient precision, the method of shortest ways finding similar to Dijkstra's [4] algorithm was considered as a basic model of the direction of wave propagation. It is suitable for discrete bodies derived from 2D or 3D bitmap pictures [5] and enables tracing of elastic waves propagating in structures of complicated shapes and also considering the anisotropy, without mathematical models of wave propagation. The method is inspired by Huygens' principle: each point on advancing wave front may be considered as a new point source generating spherical Huygens' wavelets. Such approach enables collecting of sufficient amount of representative data for AE source location algorithms based on database searching or artificial neural networks.
Having the tool for general finding the distances in incoherent bodies, it is possible to show the aspects of particular configurations of sensors in accordance with the sensitivity of location results to the changes of arrival-time profiles together with their possible variability and ambiguity (discussed in next chapters).
4. Sensitivity maps
Analogically to GDOP, let’s define the location sensitivity parameter SM for any pixel XA and its neighbourhood NA in discretely defined body with N placed sensors. The scheme in the right part of the fig.4 shows the detail view of structure part:
Fig.4: Definition of sensitivity parameter SM.
After computation of SM parameter for all body pixels, it is possible to show resulting sensitivity map. Higher values predict possible good location precision, while the poor is shown by small numbers caused by significantly higher variance of AE source coordinates compared to variance of corresponding arrival-time-profile. Following figure illustrates the case of two selected configurations of three sensors. Problematic areas in a sense of location precision can be expected in areas characterized by small levels of SM (dark regions) and close to the points with more steepest changes of this parameter (sharp lines in fig.5).
4
Body pixels
Neighbourhood NA shape
Actual body pixel XA=[x
A,y
A]
Out-of-mass pixels
Pixels to compute … X=[x,y]
NA
x [pixels]
y [p
ixels
]
SM (XA) = mean
X ∈NA{d E(P ( X A) , P(X ))
d E(X A , X ) } (3)
where P( X A) is ATP for pixel X A
P(X ) is ATP for pixel X
and dE (... , ...) is Euclidean distance

Fig.5: Sensitivity maps for two selected combinations of three sensors.
As expected, the best region for location should be in a convex hull of the three sensors. Some singularities or numerical stability problems can be caused by the holes in material.
5. Similarity of arrival-time profiles
To illustrate how the arrival-time profiles vary within the complicated body, the similarity map was assorted as well. Each colour distinguishes the regions having in some small tolerance similar chronology of signal arrivals to sensors. Large regions detect problematic areas and vice versa (see fig.6).
Fig.6: Similarity maps for two selected combinations of three sensors.
5
x [pixels] x [pixels]
y [
pix
els
]
y [
pix
els
]
y [
pix
els
]
y [
pix
els
]
x [pixels] x [pixels]
SIMILARITY MAP SIMILARITY MAP
p1p2p3
p7p8p9
p4p5
p6
S4
S6
S1
p1p2p3
p7p8p9
p4p5
p6
S3
S6
S1

6. Location ambiguity measure
Another point of view to location problem aspects can be illustrated as finding a crossing of the two hyperboles in localization by time-differences. It is clear, that 2D location of AE sources using 3 transducers is not unambiguous [6]. Left part of fig.7 shows the problem of possible existing of two different source locations inducing the same time-differences. Naturally, the number of such coupled-points is not limited.
Fig.7: 2-D AE sources location ambiguity.
The right part of fig.7 shows the areas of unambiguous locations for this particular sensor configuration. Any AE source in dark grey area has the same time-differences as corresponding source in light grey area and vice versa. The problem is usually solved by adding the fourth sensor, while the area of unambiguous locations is theoretically reduced to insular points.
The location ambiguity is generally caused by the insufficient number of sensors and concerns with the arrival-time profiles as well. To detect distant pixels having very similar arrival-time chronology, so-called Location Ambiguity Map (LAM) is introduced. For every body pixel X=(x,y) it is needed to find a set of other pixels Xi that are not direct neighbours indeed, but have very close arrival-time profile by Euclidean measure. It means that their distance is less than a small tolerance tol. For such pixels Xi the resulting number LAM(X) is the mean ratio of distances in arrival-time profile and x-y-coordinate spaces:
(4)
An ambiguity map is the set of numbers LAM(X) enumerated for all body pixels and can be considered as a useful tool for finding an adequate setup of sensors. Small numbers detect problematic areas of pixels for which somewhere exist points with nearly the same arrival-time chronology. Thus, the estimate of unique AE source location is unable in such areas.
After analysis by all above mentioned methods, both two sensor configurations (1-4-6 and 1-3-6) were tested by real measured arrival-times of AE signals. The goal was to compare numerical prediction of location precision with resulting locations of sets of PLBs (see fig. 8 and 9).
6
LAM (X )= MEAN { d E (P (X ) , P (X i))
d E(X , X i) ∣ d E (P (X ) , P( X i)) <tol.}
source location(crossing of hyperboles)
S2
S3S1

Fig.8: Location Ambiguity Map versus location results for sensor group 1-4-6.
Fig.9: Location Ambiguity Map versus location results for sensor group 1-3-6.
7. Discussion of results
After recording of nine sets of approximately 50 PLBs by six AE channels, the crucial step for their location was to estimate the signal onsets. While testing the most stable and precise
7
p1p2p3
p7p8p9
p4p5
p6
S4
S6
S1
x [pixels]
y [p
ixels
]
LOCATION MAP
x [cm]
y [cm
]
x [pixels]
y [
pix
els
]
p1
p2p3
p7p8p9
p4
p5
p6
S3
S6
S1
LOCATION MAP
x [cm]
y [
cm
]

approach, the expert signal edge detection method [7] approved as the best. Another problem was to fit the elastic wave velocities for each component of the testing structure with the numerical pixel model. The sensors were placed directly on the main body surface, on the waveguide, or the supporting leg, each part made from different materials. As a reference point for the best fitting, the position of PLB with the most stable location in the meaning of Location Ambiguity Map was selected (position 1 for sensor configuration 1-3-6 and pos. 5 for configuration 1-4-6). The optimal elastic wave velocities approximately measured and then corrected by gradual fitting proved best around 5 km/s. As the final location estimate of each AE event, the x-y coordinates of pixels with the closest numerically computed arrival-time profile were established.
Comparing the left and right sides of fig. 8 and 9 it is possible to conclude, that the reliability of AE source location can be illustrated very well by Location Ambiguity or Similarity Maps. Especially in the case of sensor group 1-3-6, the resulting variance and shift of estimated x-y AE source coordinates matches the envelope of LAM levels. The satisfactory precision was found for PLB position 1, while for positions 2 and 3 precision subsequently failed. Resulting small shift at position 4 seems to be caused by location sensitivity detected by certain edge coming through corresponding pixels of LAM. The results for remaining positions are not displayed, because of too high variance and shift. In conclusion, for particular configurations of sensors it is possible to analyse the location capability of the setup by means of sensitivity, similarity and ambiguity maps.
Acknowledgements
The work was supported by the Grant Agency of the Czech Republic under the grant no. GACR 17-22615S, and by Institutional support RVO: 61388998 (CR), which is gratefully acknowledged.
References:
[5] Benneths, J.B., Organisation for Materials, NDT Journal Concept, Vol. 54, 2001, pp.
[1] Zekavat, R., Buehrer R. M., Handbook of Position Location: Theory, Practice and Advances, Vol. 27. John Wiley & Sons, 2011.
[2] Bar-Shalom, Y., Li, X. R, Kirubarajan, T., Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software, John Wiley & Sons, 2004.
[3] Thenikl, T., Altmann, D., Vallen, H., Quantifying Location Errors, Proc. of EWGAE 2016. Prague, Czech Society for Nondestructive Testing, ISBN 978-80- 214-5386-9, pp. 495-502.
[4] Dijkstra, E. W., A note on two problems in connexion with graphs, (PDF). Numerische Mathematik 1: 269–271. doi:10.1007/BF01386390.
[5] Chlada, M., Prevorovsky, Z., Shortest Ways Finding in Discrete Bodies, Proc. of NDT in Progress 2015. Prague, Czech Society for Nondestructive Testing, ISBN 978-80-214-5262-6, pp. 69-74.
[6] Blahacek, M., Time Differences Uncertainty Influence on Acoustic Emission Source Location Accuracy, Proc. of NDT in Progress 2007. Prague, Czech Society for Nondestructive Testing, ISBN 978-80- 214-3505-6, pp. 15-22.
[7] Chlada, M., Prevorovsky, Z., Expert AE signal arrival detection. International Journal of Microstructure and Materials Properties 6(3/4), pp. 191-205.
8