Embed Size (px)
Citation preview

Research ArticleAnalysis for a Delayed Three-Species Predator-Prey Model withFeedback Controls and Prey Diffusion
Lili Jia
Dianchi College of Yunnan University Kunming 650228 China
Correspondence should be addressed to Lili Jia lilijiadianchi163com
Received 9 January 2020 Accepted 28 February 2020 Published 11 April 2020
Academic Editor Dimitri Mugnai
Copyright copy 2020 Lili Jia is is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
In this paper we study a class of 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model with feedbackcontrols and prey diffusion By using the theory of delay differential inequalities and developing some new analysis methods aswell as constructing a suitable Lyapunov function some sufficient conditions are obtained to guarantee the permanence of thesystem and the global attractivity of the positive solution for the predator-prey system Furthermore the corresponding periodicsystem is discussed and some conditions are established about the existence uniqueness and stability of the positive periodicsolution for the periodic system by using the fixed-point theory and theoretical analysis In additional some numerical solutionsof the equations describing the system are given to verify the obtained criteria Finally the corresponding stochastic time-delaypredator-prey model with multiplicative noise sources is solved numerically and some interesting new dynamics behavioris obtained
1 Introduction
e dynamic relationship between predator and prey is oneof the core problems in population ecology Especially thestudy of persistence and globally attractive as well as periodicof biological species is a very important research direction inpopulation dynamics behavior research e traditionalLotkandashVolterra predator model has been studied by moreand more scholars and a lot of research results have beenachieved (see [1ndash4] and the references cited therein) In somepractical applications such as population growth repro-ductive physiology and organic insensitivity the growthrate of the species does not respond immediately In otherwords we have to face a time delay e existence of delay inthe system greatly affects the stability of the system In somecases the system is stable when the delay value is smallerHowever many scholars found that longer delays maydestroy the stability of the system Some related results areshown in [5ndash9] and the references cited therein In [9] theauthors considered a three-species LotkandashVolterra-typecompetitive-mutualism system with discrete time delays andestablished some conditions on the boundedness
permanence and global attractivity for the system Fur-thermore in the real world species can diffuse betweenpatches So we should consider the effect of dispersal on thepermanence and global stability of the ecosystem Someresearch results can be seen for example in [10ndash13] Songand Chen [10] studied a two-species predator-prey systemwith diffusion It is proved in this paper that the system canbe made persistent furthermore if the system is a periodicsystem it can have a strictly positive periodic orbit which isglobally asymptotically stable under the appropriate con-ditions Moreover predators have to search for food andhave to share or compete for food and a more suitablegeneral LotkandashVolterra predator-prey model should bebased on the so-called ldquoratio-dependentrdquo theory at is tosay the per capita predator growth rate should be a functionof the ratio of prey to predator abundance (eg see [14ndash17])In [14] Wang and Wang considered a ratio-dependentpredator-prey system with two competing preys predated byone predator and showed that this system is permanent andglobally asymptotically stable under some appropriateconditions In order to study the combined effects of timedelay dispersion and ratio-dependent on the dynamic
HindawiJournal of MathematicsVolume 2020 Article ID 5703859 26 pageshttpsdoiorg10115520205703859
behavior of predator-prey systems some models have beenstudied by many authors [18ndash24] Xu and Chaplain [18]studied a three-species predator-prey model both with timedelay and ratio-dependent ey proved that the system isuniformly persistent under some appropriate conditionsand by means of constructing suitable Lyapunov functionalsufficient conditions are derived for the global asymptoticstability of the positive equilibrium of the system In 2004Xu et al [19] studied a LotkandashVolterra predator-prey modelwith dispersion and time delays By using Ganies andMawhinrsquos continuation theorem of coincidence degreetheory and constructing the appropriate Lyapunov function
a set of easily verifiable sufficient conditions are derived forthe existence uniqueness and global stability of positiveperiodic solutions of the system In [21] Sun and Yuanconsidered a nonautomous mixture model both with ratio-dependent and diffusion It is shown that the system isuniformly and persistently related to the dispersion rateFurthermore the sufficient conditions are obtained for theglobal asymptotic stability of a periodic solution for thesystem In [23] the authors considered the following delayedtwo-predator-one-prey ratio-dependent model with patchdispersion
_x1 x1(t) a1 minus a11x1(t) minusa13x3(t)
m13x3(t) + x1(t)1113890 minus
a14x4(t)
m14x4(t) + x1(t)+D1 x2(t) minus x1(t)( 1113857
_x2 x2(t) a2 minus a22x2(t)1113858 1113859 +D2 x1(t) minus x2(t)( 1113857
_x3 x3(t) minus a3 +a31x1 t minus τ1( 1113857
m13x3 t minus τ1( 1113857 + x1 t minus τ1( 11138571113890 1113891
_x4 x4(t) minus a4 +a41x1 t minus τ2( 1113857
m14x4 t minus τ2( 1113857 + x1 t minus τ2( 11138571113890 1113891
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(1)
where xi(t)(i 1 2) represents the prey density in the i-thpatch xj(t)(j 3 4) represents the predator densityτ1 τ2 gt 0 are constant delays due to gestation Di(i 1 2)are positive constants that denote the dispersal rates aiaij(i j 1 2 3 4) and m13 and m14 are positive constantsthat denote interaction among species It is shown thatsystem (1) is uniformly persistent under some appro-priate conditions and sufficient conditions are obtainedfor the global stability of the positive equilibrium of thesystem
On the contrary in the real world ecosystems arecontinuously distributed by unpredictable forces whichcould cause a stable system to become unstable or cause thespecies to fluctuate In order to make an unstable system orequilibrium to become stable one we can introduce anindirect feedback control variables e feedback controlmechanisms can be implemented through harvesting orculling procedures or some biological control schemes So itis necessary to study models with control variables Recentlythere has been a lot of literature related to the study ofLotkandashVolterra-type system with feedback controls [25ndash30]In 2003 Gopalsamy and Weng [25] studied a two-speciescompetition system with feedback controls Some sufficientconditions are obtained for the existence of a globallyattracting positive equilibrium of the system To study theinfluence of the patch diffusion ratio-dependent andfeedback control on existence of periodic solution Xie and
Weng [26] considered a predator-prey model with patch-diffusion ratio-dependent and feedback control Bychanging the ordinary differential system into an operatorequation and using Mawhinrsquos continuation theorem theexistence of at least one positive periodic solution for thismodel is proved In order to show that whether the feedbackcontrol variables play an essential role on the persistentproperty and global stability of LotkandashVolterra cooperativesystems or not Liang [28] discussed a two-species systemwith time delays and feedback control and proved that theonly positive equilibrium point of the system is globallystable In 2016 Wang et al [29] studied a ratio-dependentLotkandashVolterra predator-prey model with feedback controlSome sufficient conditions which guarantee the globallyattractive of positive solution for the predator-prey modelare obtained In [30] Chen considered a LotkandashVolterrabiological system with feedback controls and obtained someconditions for the permanence and global attractivity of thissystem
However to the best of the authorsrsquo knowledge there arefew scholars who study the three-species multidelay Lot-kandashVolterra ratio-dependent predator-prey model withfeedback controls and prey diffusion So based on system (1)and motivated by the above works in this paper we proposeand investigate the following three-species multidelay ratio-dependent predator-prey model with feedback controls andprey diffusion
2 Journal of Mathematics
_x1(t) x1(t) r1(t) minus a11(t)x1(t) minusa13(t)x3(t)
b13(t) + x1(t)minus
a14(t)x4(t)
b14(t) + x1(t)minus d1(t)u1(t)1113890 1113891 +D1(t) x2(t) minus x1(t)( 1113857
_x2(t) x2(t) r2(t) minus a22(t)x2(t)1113858 1113859 +D2(t) x1(t) minus x2(t)( 1113857
_x3(t) x3(t) minus r3(t) minus a33(t)x3 t minus τ1( 1113857 +a31(t)x1 t minus τ2( 1113857
b13(t) + x1 t minus τ2( 1113857+ d2(t)u2(t)1113890 1113891
_x4(t) x4(t) minus r4(t) minus a44(t)x4 t minus τ3( 1113857 +a41(t)x1 t minus τ4( 1113857
b14(t) + x1 t minus τ4( 1113857+ d3(t)u3(t)1113890 1113891
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(2)
where xi(t)(i 1 2) denote the prey density in the i-thpatch and xj(t)(j 3 4) represents the predator densitye predator species is confined to patch 1 while the preyspecies can disperse between two patches ri(t)(i 1 2)denote the intrinsic growth rate of the prey species andrj(t)(j 3 4) are the death rate of the predators aii(t)(i
1 2 3 4) denote the internal competitive coefficient ofspecies a13(t) and a14(t) are the ratio of prey by predatora31(t) and a41(t) represent the nutrient absorption ratio ofthe predator after predation and Di(t) (i 1 2) are thedispersion rate of prey species ui(t)(i 1 2 3) are thefeedback control terms ei(t) fi(t) and qi(t)(i 1 2 3) arethe coefficient functions of the control equations and τ1 τ2τ3 and τ4 are positive constants representing delays All of
the coefficients in the model are continuous and positive-bounded functions defined on [0+infin)
Remark 1 It is easy to see that the designed controller of thispaper is similar to that in [29] and the designed controller in[29] is as follows
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)
_u2(t) e2(t) minus f2(t)u2(t) + q2(t)x2(t)
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x3(t)
(3)
Namely
u1(t) eminus 1113938
t
0f1(t)dt
1113946t
0e1(t) + q1(t)x1(t)1113858 1113859e
1113938t
0f1(t)dtdt + φ1(0)1113896 1113897
u2(t) eminus 1113938
t
0f2(t)dt
1113946t
0e2(t) + q2(t)x2(t)1113858 1113859e
1113938t
0f2(t)dtdt + φ2(0)1113896 1113897
u3(t) eminus 1113938
t
0f3(t)dt
1113946t
0e3(t) minus q3(t)x3(t)1113858 1113859e
1113938t
0f3(t)dtdt + φ3(0)1113896 1113897
(4)
And the designed controller in this paper is as follows
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
(5)
Journal of Mathematics 3
at is
u1(t) eminus 1113938
t
0f1(t)dt
1113946t
0e1(t) + q1(t)x1(t)1113858 1113859e
1113938t
0f1(t)dtdt + φ1(0)1113896 1113897
u2(t) eminus 1113938
t
0f2(t)dt
1113946t
0e2(t) minus q2(t)x3(t)1113858 1113859e
1113938t
0f2(t)dtdt + φ2(0)1113896 1113897
u3(t) eminus 1113938
t
0f3(t)dt
1113946t
0e3(t) minus q3(t)x4(t)1113858 1113859e
1113938t
0f3(t)dtdt + φ3(0)1113896 1113897
(6)
However the state equations are different e modelin [29] contains two preys and one predator while themodel in this paper contains one prey and two predatorsIn particular the new model contains prey diffusion anddelays
Due to biological interpretation of system (2) it isreasonable to consider only the positive solution of (2) inother words to take admissible initial conditions
xi(t) ϕi(t)ge 0 t isin [minus τ 0)
ϕi(0)gt 0 i 1 2 3 4
uj(0) φj(0)gt 0 j 1 2 3
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(7)
where τ max τ1 τ2 τ3 τ41113864 1113865Obviously the solutions of system (2) with initial data
(7) are positive for all tge 0is paper is organized as follows in Section 2 we give
the conditions for the permanence to system (2) by means ofthe theory of delay differential inequalities In Section 3 byconstructing an appropriate Lyapunov function we derivesufficient conditions for the global attractivity of positivesolution for system (2) In Section 4 by using some newanalysis method and the Brouwer fixed-point theory weobtain some conditions for the existence uniqueness andstability of a positive periodic solution for the correspondingperiodic system Some numerical solutions of the equationsdescribing the system are shown in Section 5 to verify thevalidity of the obtained criteria
2 Permanence
Firstly we introduce the following notations and definitionsFor a function g(t) defined on [t0+infin) we set
gm sup g(t) | t0 lt tltinfin1113864 1113865
gl inf g(t) | t0 lt tltinfin1113864 1113865
(8)
Definition 1 System (2) is called permanent if there existpositive constantsMi Nj mi nj (i 1 2 3 4 j 1 2 3) andT such that mi lexi(t)leMi and nj le uj(t)leNj for any
positive solution Z(t) (x1(t)) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t) of system (29) as tgtT
As a direct corollary of Lemma 21 of Chen [31] we havethe following
Lemma 1 If agt 0 bgt 0 and _xge b minus ax when tge 0 andx(0)gt 0 we have lim inf t⟶+infinx(t)ge ba If agt 0 bgt 0 and_xle b minus ax when tge 0 and x(0)gt 0 we havelim supt⟶+infinx(t)le ba
As a direct corollary of Lemma 22 of Chen [31] we havethe following
Lemma 2 If agt 0 bgt 0 and _xge b minus ax when tge 0 andx(0)gt 0 we have lim inf t⟶+infinx(t)ge ba If agt 0 bgt 0 and_xlex(b minus ax) when tge 0 and x(0)gt 0 we havelim supt⟶+infinx(t)le ba
Lemma 3 (see [32]) Assume that for y(t)gt 0 it holds that_y(t)ley(t)(λ minus 1113936
mk0 μ
ky(t minus kτ)) +D with initial condi-tions y(t) ϕ(t)ge 0 for t isin [minus mτ 0) and ϕ(0)gt 0 whereλgt 0 μk ge 0(k 0 1 m) μ 1113936
mk0 μk gt 0 and Dge 0 are
constants -en there exists a positive constant My lt +infinsuch that
lim supt⟶+infin
y(t)leMy minusD
λ+
D
λ+ ylowast
1113874 1113875exp(λmτ)lt +infin
(9)
where y ylowast is the unique solution of equationy(λ minus μy) +D 0
Lemma 4 (see [32]) Assume that for y(t)gt 0 it holds that_y(t)gey(t)[λ minus 1113936
mk0 μ
ky(t minus kτ)] If (9) holds then thereexists a positive constant my gt 0 such that for μ 1113936
mk0 μ
k gt 0we have
lim inft⟶+infin
y(t)gemy λμexp λ minus μMy1113872 1113873mτ1113966 1113967gt 0 (10)
For system (2) we let
4 Journal of Mathematics
M1 M2 maxrm1
al11
rm2
al22
1113896 1113897
N1 em1 + qm
1 M1
fl1
N2 em2
fl2
N3 em3
fl3
M3 am31M1( 1113857 bl
13 +M1( 1113857 + dm2 N2 minus rl
3
al33
times exp
middotam31M1
bl13 +M1
+ dm2 N2 minus r
l31113888 1113889τ11113890 1113891
M4 am41M1( 1113857 bl
14 +M1( 1113857 + dm3 N3 minus rl
4
al44
times exp
middotam41M1
bl14 +M1
+ dm3 N3 minus r
l41113888 1113889τ31113890 1113891
m1 rl1 minus am
13M3bl13 minus am
14M4bl14 minus dm
1 N1 minus Dm1
am11
m2 rl2 minus Dm
2am22
n1 el1 + ql
1m1
fm1
n2 el2 minus qm
2 M3
fm2
n3 el3 minus qm
3 M4
fm3
m3 al31m1( 1113857 bm
13 +m1( 1113857 + dl2n2 minus rm
3am33
times exp
middotal31m1
bm13 +m1
+ dl2n2 minus r
m3 minus a
m33M31113888 1113889τ11113890 1113891
m4 al41m1( 1113857 bm
14 +m1( 1113857 + dl3n3 minus rm
4am44
times exp
middotal41m1
bm14 +m1
+ dl3n3 minus r
m4 minus a
m44M41113888 1113889τ31113890 1113891
(11)
Next we state and prove our main result with respect tothe permanent for system (2)
Theorem 1 Suppose that system (2) satisfies the initialconditions (7) and following assumptions
(H1) rl3 lt (am
31M1)(bl13 +M1) + dm
2 N2
(H2) rl4 lt (am
41M1)(bl14 +M1) + dm
3 N3
(H3) rl1 gt am
13M3bl13 + am
14M4bl14 + dm
1 N1 +Dm1
(H4) rl2 gtDm
2
(H5) el2 gt qm
2 M3
(H6) el3 gt qm
3 M4
(H7) rm3 lt (al
31m1)(bm13 +m1) + dl
2n2
(H8) rm4 lt (al
41m1)(bm14 +m1) + dl
3n3
-en system (2) is permanent
Proof According to the first and the second equations ofsystem (2) we define W1(t) max x1(t) x2(t)1113864 1113865 and cal-culate the upper right derivative of W1(t) along the positivesolution of system (2) and we have that
(P1) if x1(t)gex2(t) then
D+W1(t) _x1(t) x1(t) r1(t) minus a11(t)x1(t)1113858
minusa13(t)x3(t)
b13(t) + x1(t)minus
a14(t)x4(t)
b14(t) + x1(t)
minus d1(t)u1(t)1113859 +D1(t) x2(t) minus x1(t)( 1113857
lex1(t) r1(t) minus a11(t)x1(t)1113858 1113859
lex1(t) rm1 minus a
l11x1(t)1113960 1113961
W1(t) rm1 minus a
l11W1(t)1113960 1113961
(12)
(P2) if x1(t)lex2(t) then
D+W1(t) _x2(t) x2(t) r2(t) minus a22(t)x2(t)1113858 1113859
+D2(t) x1(t) minus x2(t)( 1113857
le x2(t) r2(t) minus a22(t)x2(t)1113858 1113859
le x2(t) rm2 minus a
l22x2(t)1113960 1113961
W1(t) rm2 minus a
l22W1(t)1113960 1113961
(13)
It follows from (P1) and (P2) that
D+W1(t)leW1(t) r
mi minus a
liiW1(t)1113960 1113961 i 1 2 (14)
By (14) we can also deduce the following
(A) If W1(0) max x1(0) x2(0)1113864 1113865leM1 then we havemax x1(t) x2(t)1113864 1113865leM1 tge 0
(B) If W1(0) max x1(0) x2(0)1113864 1113865gtM1 take appro-priate αgt 0 we have the following three possibilities
(a) W1(0) x1(0)gtM1 (x1(0)gt x2(0))(b) W1(0) x2(0)gtM1 (x1(0)lt x2(0))(c) W1(0) x1(0) x2(0)gtM1
If (a) holds then there exists εgt 0 t isin [0 ε) such thatW1(t) x1(t)gtM1 en we get
Journal of Mathematics 5
D+W1(t) _x1(t)le a
l11W1(t)
rm1
al11minus W1(t)1113890 1113891le minus αlt 0
(15)
Similarly if (b) holds there exists εgt 0 t isin [0 ε) andW1(t) x2(t)gtM1 to derive
D+W1(t) _x2(t)le a
l22W1(t)
rm2
al22minus W1(t)1113890 1113891le minus αlt 0
(16)
Moreover in case (c) we also have
D+W1(t) _xi(t)le a
liiW1(t)
rmi
alii
minus W1(t)1113890 1113891le minus αlt 0 i 1 or 2
(17)
From what we have discussed above it yields that ifW1(0)gtM1 then W1(t) is strictly monotone decreasingwith speed at least α so there exists T1 gt 0 such that for anytime tgeT1 W1(t) max x1(t) x2(t)1113864 1113865leM1 which admits
lim supt⟶+infin
x1(t)leM1 M2 maxrm1
al11
rm2
al22
1113896 1113897 (18)
lim supt⟶+infin
x2(t)leM1 M2 maxrm1
al11
rm2
al22
1113896 1113897 (19)
According to the fifth equation of system (2) we have
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)le em1 minus f
l1u1(t) + q
m1 M1
(20)
Using Lemma 1 we can deduce
lim supt⟶+infin
u1(t)leem1 + qm
1 M1
fl1
N1 (21)
Similarly in light of the last two equations of system (26)we then have
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
le e2(t) minus f2(t)u2(t)le em2 minus f
l2u2(t)
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
le e3(t) minus f3(t)u3(t)le em3 minus f
l3u3(t)
(22)
By utilizing Lemma 1 again we can get
lim supt⟶+infin
u2(t)leem2
fl2 N2 (23)
lim supt⟶+infin
u3(t)leem3
fl3 N3 (24)
From the third and fourth equations of system (2) wehave
_x3(t) x3(t)1113890 minus r3(t) minus a33(t)x3 t minus τ1( 1113857
+a31(t)x1 t minus τ2( 1113857
b13(t) + x1 t minus τ2( 1113857+ d2(t)u2(t)1113891
lex3(t) minus rl3 minus a
l33x3 t minus τ1( 1113857 +
am31M1
bl13 +M1
+ dm2 N21113890 1113891
_x4(t) x4(t)1113890 minus r4(t) minus a44(t)x4 t minus τ3( 1113857
+a41(t)x1 t minus τ4( 1113857
b14(t) + x1 t minus τ4( 1113857+ d3(t)u3(t)1113891
lex4(t) minus rl4 minus a
l44x4 t minus τ3( 1113857 +
am41M1
bl14 +M1
+ dm3 N31113890 1113891
(25)
By Lemma 3 combining with (H1) and (H2) we have
lim supt⟶+infin
x3(t)leam31M1 bl
13 +M1( 1113857 + dm2 N2 minus rl
3
al33
times expam31M1
bl13 +M1
dm2 N2 minus r
l31113888 1113889τ11113890 1113891
M3
(26)
lim supt⟶+infin
x4(t)leam41M1 bl
14 +M1( 1113857 + dm3 N3 minus rl
4
al44
times expam41M1
bl14 +M1
+ dm3 N3 minus r
l41113888 1113889τ31113890 1113891
M4
(27)
On the contrary from the first equation of system (2) itfollows that
_x1(t) x1(t) r1(t) minus a11(t)x1(t)1113858
minusa13(t)x3(t)
b13(t) + x1(t)minus
a14(t)x4(t)
b14(t) + x1(t)
minus d1(t)u1(t)1113859 +D1(t) x2(t) minus x1(t)( 1113857
gex1(t) r1(t) minus a11(t)x1(t) minusa13(t)x3(t)
b13(t)1113890
minusa14(t)x4(t)
b14(t)minus d1(t)u1(t) minus D1(t)1113891
gex1(t) rl1 minus a
m11x1(t) minus
am13M3
bl13
minusam14M4
bl14
minus dm1 N1 minus D
m11113890 1113891
(28)
By Lemma 2 and assumption (H3) we have
6 Journal of Mathematics
lim inft⟶+infin
x1(t)gerl1
am11minus
am13M3
bl13a
m11minus
am14M4
bl14a
m11
minusdm1 N1
am11
minusDm
1am11
m1
(29)
For the second equation of system (2) it holds that
_x2(t) x2(t) r2(t) minus a22(t)x2(t)1113858 1113859
+D2(t) x1(t) minus x2(t)( 1113857
gex2(t) r2(t) minus a22(t)x2(t) minus D2(t)1113858 1113859
gex2(t) rl2 minus a
m22x2(t) minus D
m21113960 1113961
(30)
From assumption (H4) and by Lemma 2 we can get
lim inft⟶+infin
x2(t)gerl2 minus Dm
2am22
m2 (31)
For the fifth equation of system (2) we have
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)
ge el1 minus f
m1 u1(t) + q
l1m1
(32)
By Lemma 1 it holds that
lim inft⟶+infin
u1(t)geel1 + ql
1m1
fm1
n1 (33)
For the sixth and the seventh equations of system (2) wecan obtain
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
ge el2 minus f
m2 u2(t) minus q
m2 M3
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
ge el3 minus f
m3 u3(t) minus q
m3 M4
(34)
By Lemma 1 (H5) and (H6) we have
lim inft⟶+infin
u2(t)geel2 minus qm
2 M3
fm2
n2 (35)
lim inft⟶+infin
u3(t)geel3 minus qm
3 M4
fm3
n3 (36)
According to the third and the fourth equations ofsystem (2) we have
_x3(t) x3(t)1113890 minus r3(t) minus a33(t)x3 t minus τ1( 1113857
+a31(t)x1 t minus τ2( 1113857
b13(t) + x1 t minus τ2( 1113857+ d2(t)u2(t)
ge x3(t) minus rm3 minus a
m33x3 t minus τ1( 1113857 +
al31m1
bm13 +m1
+ dl2n21113890 1113891
_x4(t) x4(t)1113890 minus r4(t) minus a44(t)x4 t minus τ3( 1113857
+a41(t)x1 t minus τ4( 1113857
b14(t) + x1 t minus τ4( 1113857+ d3(t)u3(t)1113891
ge x4(t)1113890 minus rm4 minus a
m44x4 t minus τ3( 1113857
+al41m1
bm14 +m1
+ dl3n31113891
(37)
Using Lemma 4 (H7) and (H8) we also derive that
lim inft⟶+infin
x3(t)geal31m1( 1113857 bm
13 +m1( 1113857 + dl2n2 minus rm
3am33
times expal31m1
bm13 +m1
+ dl2n2 minus r
m3 minus a
m33M31113888 1113889τ11113890 1113891
m3
(38)
lim inft⟶+infin
x4(t)geal41m1( 1113857 bm
14 +m1( 1113857 + dl3n3 minus rm
4am44
times expal41m1
bm14 +m1
+ dl3n3 minus r
m4 minus a
m44M41113888 11138891113890 1113891τ3
m4
(39)
Summarizing (18)ndash(39) we complete the induction ofeorem 1
Remark 2 It is obvious that the proof method for Lemma21 in [29] is the differential inequality theory while that ofthis article is the delay differential inequality theory Fromthe result of eorem 1 the feedback control items anddelays have influence on the permanence of system (2) Inother words the densities of the prey and predator pop-ulations are uniformly bounded when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H8)
3 Global Attractivity
In this section the global attractivity of system (2) will bestudied To get the sufficient conditions for global attractivity ofsystem (2) we firstly give the following definition and Lemma
Journal of Mathematics 7
Definition 2 System (2) is said to be globally attractive ifthere exists a positive solution
X(t) x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)( 1113857
(40)
of system (2) such that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0
limt⟶+infin
ui(t) minus vi(t)1113868111386811138681113868
1113868111386811138681113868 0
i 1 2 3 4 j 1 2 3
(41)
for any other positive solutionY(t) (y1(t) y2(t) y3(t) y4(t) v1(t) v2(t) v3(t)) of sys-tem (2)
Lemma 5 (see [33]) If the function f(t) R+⟶ R isuniformly continuous and the limit limt⟶+infin 1113938
t
0 f(s)ds existsand is finite then limt⟶+infinf(t) 0
Next we state and prove our main result with respect tothe global attractivity for system (2)
Theorem 2 Assume that system (2) satisfies (H1)minus (H8) andthe following conditions
(H9) Ai gt 0 Bj gt 0 (i 1 2 3 4 j 1 2 3) where
B1 fl1 minus d
m1
B2 fl2 minus d
m2 minus M3d
m2 a
m33τ1
B3 fl3 minus d
m3 minus M4d
m3 a
m44τ3
A1 al11 minus
am13M3
bl13 +m1( 1113857
2 minusam14M4
bl14 +m1( 1113857
2 minusDm
2m2
minusam31b
m13
bl13 +m1( 1113857
2
minusM3a
m31a
m33τ1
bl13 +m1
minusam41b
m14
bl14 +m1( 1113857
2 minusM4a
m41a
m44τ3
bl14 +m1
minus qm1
A2 al22 minus Dm
1m1
A3 al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
+ dm2 N21113888 1113889a
m33τ1
minus M3 am33( 1113857
2τ1 minusam13b
m13 + am
13M1
bl13 +m1( 1113857
2 minus qm2
A4 al44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113888 1113889a
m44τ3
minus M4 am44( 1113857
2τ3 minusam14b
m14 + am
14M1
bl14 +m1( 1113857
2 minus qm3
(42)
-en system (2) is globally attractive
Proof Suppose that (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t)
u3(t)) and (y1(t) y2(t) y3(t) y4(t) v1(t) v2(t) v3(t)) areany two different positive solutions of system (2)en from
eorem 1 there exist positive constants Mi mi Njnj(i 1 2 3 4 j 1 2 3) and T such that
mi lexi(t) yi(t)leMi i 1 2 3 4
nj le uj(t) vj(t)leNj j 1 2 3(43)
We defineV1(t) lnx1(t) minus lny1(t)
11138681113868111386811138681113868111386811138681113868
V2(t) lnx2(t) minus lny2(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎨
⎩ (44)
Calculating the upper-right derivative of V1(t) andV2(t) along the solution of system (2) we have
1113944
2
i1D+Vi(T) 1113944
2
i1D+ lnxi(t) minus lnyi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961
le sgn x1(t) minus y1(t)1113864 11138651113890 minus a11(t) x1(t) minus y1(t)( 1113857
minusa13(t)b13(t) + a13(t)y1(t)( 1113857 x3(t) minus y3(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa13(t)y3(t) x1(t) minus y1(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa13(t)y3(t) x1(t) minus y1(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa14(t)b14(t) + a14(t)y1(t)( 1113857 x4(t) minus y4(t)( 1113857
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857
minusa14(t)y4(t) x1(t) minus y1(t)( 1113857
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857
minus d1(t) u1(t) minus v1(t)( 1113857 +D1(t)x2(t)
x1(t)minus
y2(t)
y1(t)1113888 11138891113891
+ sgn x2(t) minus y2(t)1113864 1113865 minus a22(t) x2(t) minus y2(t)( 11138571113858
+D2(t)x1(t)
x2(t)minus
y1(t)
y2(t)1113888 11138891113891
le minus a11(t) minusa13(t)y3(t)
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 11138571113888
minusa14(t)y4(t)
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 11138571113889
times x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868 minus a22(t) x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868
+a13(t)b13(t) + a13(t)y1(t)
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+a14(t)b14(t) + a14(t)y1(t)
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+ d1(t) u1(t) minus v1(t)1113868111386811138681113868
1113868111386811138681113868 + 1113957D1(t) + 1113957D2(t)
(45)where
8 Journal of Mathematics
1113957D1(t)
D1(t)x2(t)
x1(t)minus
y2(t)
y1(t)1113888 1113889 x1(t)gty1(t)
D1(t)y2(t)
y1(t)minus
x2(t)
x1(t)1113888 1113889 x1(t)lty1(t)
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
1113957D2(t)
D2(t)x1(t)
x2(t)minus
y1(t)
y2(t)1113888 1113889 x2(t)gty2(t)
D2(t)y1(t)
y2(t)minus
x1(t)
x2(t)1113888 1113889 x2(t)lty2(t)
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
(46)
Next we discuss 1113957D1(t) under the following three cases
(a) If x1(t)gty1(t) then
1113957D1(t)leD1(t)
x1(t)x2(t) minus y2(t)( 1113857
leDm
1m1
x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868
(47)
(b) If x1(t)lty1(t) then
1113957D1(t)leD1(t)
y1(t)y2(t) minus x2(t)( 1113857le
Dm1
m1x2(t) minus y2(t)
11138681113868111386811138681113868111386811138681113868
(48)
(c) If x1(t) y1(t) the same conclusion as (a) and (b)holds
Combining the conclusions in (a)ndash(c) we have
1113957D1(t)leDm
1m1
x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868 (49)
A similar argument shows that
1113957D2(t)leDm
2 (t)
mlsquo2x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868 (50)
By means of (45)ndash(50) we have
1113944
2
i1D+Vi(t)le minus a
l11 minus
am13M3
bl13 +m1( 1113857
2 minusam14M4
bl14 +m1( 1113857
2 minusDm
2m2
⎛⎝ ⎞⎠
times x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868 minus al22 minus
Dm1
m11113888 1113889 x2(t) minus y2(t)
11138681113868111386811138681113868111386811138681113868
+am13b
m13 + am
13M1
bl13 +m1( 1113857
2 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am14b
m14 + am
14M1
bl14 +m1( 1113857
2 x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868
+ dm1 u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868
(51)
Define
V31(t) lnx3(t) minus lny3(t)1113868111386811138681113868
1113868111386811138681113868 (52)
Calculating the upper right derivative of V31(t) along thesolution of system (2) it follows thatD+V31(t) sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3 t minus τ1( 1113857(1113858
minus y3 t minus τ1( 11138571113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ d2(t) u2(t) minus v2(t)( 11138571113859
sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3(t) minus y3(t)( 11138571113858
+ d2(t) u2(t) minus v2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+a33(t)1113946t
tminus τ1_x3(θ) minus _y3(θ)( 1113857dθ1113891
sgn x3(t) minus y3(t)1113864 1113865minus a33(t) x3(t) minus y3(t)( 11138571113859
+ d2(t) u2(t) minus v2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ a33(t)1113946t
tminus τ1x3(θ)1113890 minus r3(θ) minus a33(θ)x3 θ minus τ1( 11138571113888
+a31(θ)x1 θ minus τ2( 1113857
b13(θ) + x1 θ minus τ2( 1113857+ d2(θ)u2(θ)1113891
minus y3(θ)1113890 minus r3(θ) minus a33(θ)y3 θ minus τ1( 1113857
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)11138911113889dθ1113891
sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3(t) minus y3(t)( 11138571113858
+ d2(t) u2(t) minus y2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ a33(t)1113946t
tminus τ1x3(θ) minus y3(θ)( 1113857(
times 1113890 minus r3(θ) minus a33(θ)y3 θ minus τ1( 1113857
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
Journal of Mathematics 9
+ x3(θ)1113890 minus a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 1113857( 1113857
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857( 1113857
+ d2(θ) u2(θ) minus v2(θ)( 111385711138591113857dθ⎤⎦
le minus a33(t) x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 + d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ a33(t)1113946t
tminus τ11113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891 x3(θ) minus y3(θ)
11138681113868111386811138681113868111386811138681113868
+ x3(θ) a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+ d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(53)
Define
V32(t) 1113946t
tminus τ11113946
t
sa33 s + τ1( 1113857 1113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
times x3(θ) minus y3(θ)1113868111386811138681113868
1113868111386811138681113868
+ x3(θ)1113890a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
1113868111386811138681113868⎤⎦⎞⎠dθ ds
(54)
From (53) and (54) we have
1113944
2
i1D+V3i(t)le minus a33(t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+ d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ1a33 s + τ1( 1113857ds1113890r3(t) + a33(t)y3 t minus τ1( 1113857
+a31(t)y1 t minus τ2( 1113857
b13(t) + y1 t minus τ2( 1113857+ d2(t)v2(t)1113891
times x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 +M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
times a33(t) x3 t minus τ1( 1113857 minus y3 t minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
timesa31(t)
b13(t) + x1 t minus τ2( 1113857x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds times d2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(55)
We also define
V33(t) 1113946t
tminus τ2
a31 w + τ2( 1113857b13 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)( 1113857 b13 w + τ2( 1113857 + y1(w)( 1113857
timesx1(w) minus y1(w)|dw
+M3 1113946t
tminus τ11113946
w+τ1
wa33 s + τ1( 1113857a33 w + τ1( 1113857
times x3(w) minus y3(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M3 1113946t
tminus τ21113946
w+τ2
w+τ2minus τ1a33 s + τ1( 1113857
a31 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(56)
10 Journal of Mathematics
and let
V3(t) V31(t) + V32(t) + V33(t) (57)
According to (55) and (56) calculating the upper rightderivative of V3(t) we have
D+V3(t)le minus a
l33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+dm2 N21113889 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds
minus M3am33 1113946
t+τ1
ta
m33 s + τ1( 1113857ds1113891 x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3am31
bl13 +m1
⎡⎣
times1113946t+τ2
t+τ2minus τ1a
m33 s + τ1( 1113857ds1113891 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm2 +M3d
m2 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds1113890 1113891
times u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
le minus al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+ dm2 N21113857a
m33τ1 minus M3 a
m33( 1113857
2τ11113961 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3a
m31a
m33τ1
bl13 +m1
⎛⎝ ⎞⎠ x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868
+ dm2 +M3d
m2 a
m33τ1( 1113857 u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(58)
Similarly we define
V41(t) lnx4(t) minus lny4(t)1113868111386811138681113868
1113868111386811138681113868 (59)
Calculating the upper right derivative of V41(t) along thesolution of system (2) we get
D+V41(t) sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4 t minus τ3( 1113857(1113858
minus y4 t minus τ3( 11138571113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+d3(t) u3(t) minus v3(t)( 11138571113859
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+a44(t)1113946t
tminus τ3_x4(θ) minus _y4(θ)( 1113857dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus r4(θ) minus a44(θ)x4 θ minus τ3( 11138571113858(
+a41(θ)x1 θ minus τ4( 1113857
b14(θ) + x1 θ minus τ4( 1113857+ d3(θ)u3(θ)1113891
minus y4(θ) minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)11138911113889dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t) minus y4(t)( 11138571113858
+ d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus y4(θ)( 1113857
times minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)1113891
+ x4(θ) minus a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 1113857( 11138571113858
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857( 1113857
+d3(θ) u3(θ) minus v3(θ)( 111385711138591113857dθ1113859
le minus a44(t) x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 + d3(t) u3(t) minus v3(t)1113868111386811138681113868
1113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ a44(t)1113946t
tminus τ3r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+ d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(60)
Journal of Mathematics 11
We define
V42(t) 1113946t
tminus τ31113946
t
sa44 s + τ3( 1113857 r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ ds
(61)
By (60) and (61) we have
1113944
2
i1D+V4i(t)le minus a44(t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868 + d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ3a44 s + τ3( 1113857ds times 1113890r4(t) + a44(t)y4 t minus τ3( 1113857
+a41(t)y1 t minus τ4( 1113857
b14(t) + y1 t minus τ4( 1113857+ d3(t)v3(t)1113891
times x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 +M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
times a44(t) x4 t minus τ3( 1113857 minus y4 t minus τ3( 11138571113868111386811138681113868
1113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
timesa41(t)
b14(t) + x1 t minus τ4( 1113857x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds times d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(62)
Let
V4(t) V41(t) + V42(t) + V43(t) (63)
where
V43(t) 1113946t
tminus τ4
a41 w + τ4( 1113857b14 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)( 1113857 b14 w + τ4( 1113857 + y1(w)( 1113857
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868dw
+M4 1113946t
tminus τ31113946
w+τ3
wa44 s + τ3( 1113857a44 w + τ3( 1113857
times x4(w) minus y4(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M4 1113946t
tminus τ41113946
w+τ4
w+τ4minus τ3a44 s + τ3( 1113857
a41 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(64)
By (62) and (64) we have
D+V4(t)le minus a
l44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113890 11138911113888
times 1113946t
tminus τ3a
m44 s + τ3( 1113857ds
minus M4am44 1113946
t+τ3
ta
m44 s + τ3( 1113857ds1113889 x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+am41b
m14
bl14 +m1( 1113857
2 +M4am41
bl14 +m1
⎛⎝
times1113946t+τ4
t+τ4 minus τ3a
m44 s + τ3( 1113857ds1113889 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm3 +M4d
m3 1113946
t
tminus τ3a
m44 s + τ3( 1113857ds1113888 1113889 u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(65)
Moreover define V5(t) V6(t) andV7(t) by
V5(t) ln u1(t) minus ln v1(t)1113868111386811138681113868
1113868111386811138681113868
V6(t) ln u2(t) minus ln v2(t)1113868111386811138681113868
1113868111386811138681113868
V7(t) ln u3(t) minus ln v3(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
(66)
Calculating the upper right derivative of V5(t) V6(t)and V7(t) along the solutions of system (2) it holds that
D+V5(t)le sgn u1(t) minus v1(t)( 1113857 minus f1(t) u1(t)(1113858
minus v1(t)1113857 + q1(t) x1(t) minus y1(t)( 11138571113859
le minus fl1(t) u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868 + q
m1 (t) x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
(67)
D+V6(t)le sgn u2(t) minus v2(t)( 1113857 minus f2(t) u2(t)(1113858
minus v2(t)1113857 minus q2(t) x3(t) minus y3(t)( 11138571113859
le minus fl2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
+ qm2 (t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
(68)
12 Journal of Mathematics
D+V7(t)le sgn u3(t) minus v3(t)( 1113857 minus f3(t) u3(t)(1113858
minus v3(t)1113857 minus q3(t) x4(t) minus y4(t)( 11138571113859
le minus fl3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+ qm3 (t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
(69)
Finally we define a Lyapunov function as follows
V(t) 11139447
i1Vi(t) (70)
From (51) (58) (65) and (67)ndash(69) we can get that forall tgeT + τ
D+V(t)le minus 1113944
4
i1Ai xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 minus 1113944
3
j1Bj uj(t) minus vj(t)
11138681113868111386811138681113868
11138681113868111386811138681113868
(71)
In view of conditions (H9) of eorem 2 there exists aconstant αgt 0 and Tlowast gtT + τ such that for all tgeTlowast it holdsthat
Ai ge αgt 0
Bj ge αgt 0
i 1 2 3 4 j 1 2 3
(72)
Integrating fromTlowast to t on both sides of (71) and by (72)we have
V(t) + α1113946t
Tlowast1113944
4
i1xi(s) minus yi(s)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(s) minus vj(s)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠ds
leV Tlowast
( 1113857lt +infin
(73)
erefore V(t) is bounded on [Tlowast+infin) and we have
1113946infin
Tlowast1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠dsleV(T)
αlt +infin
(74)
By (74) we also have
1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113874 1113875 isin L1(T+infin)
(75)
Applying eorem 1 we can obtain that |xi(t) minus yi(t)||uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 and their derivativesremain bounded on [Tlowast+infin) and |xi(t) minus yi(t)| and|uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 are uniformly con-tinuous on [Tlowast+infin) By Lemma 5 we can conclude that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0 i 1 2 3 4
limt⟶+infin
uj(t) minus vj(t)11138681113868111386811138681113868
11138681113868111386811138681113868 0 j 1 2 3(76)
is completes the proof and the solution of system (2)is globally attractive
Remark 3 From the result ofeorem 2 the feedback controlitems and delays have influence on the globally attractive of
system (2) namely the population densities for the system willapproach to a positive equilibrium when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H9)
Remark 4 It should not be difficult to see that the methodand skills of constructing a suitable Lyapunov function in thepaper are very different with those of [29] and the method ofconstructing Lyapunov function in [29] cannot be used inthis manuscript
4 Periodic Solution
Assuming that coefficients of system (2) are positive con-tinuous and ω minus periodic functions then system (2) ischanged to the ω minus periodic system In this section we shallobtain conditions for the existence uniqueness and stabilityof a positive periodic for system (2) by using the fixed-pointtheory and some new analysis method For convenience wegive firstly the following lemma
Lemma 6 (see [34]) Let S sub Rn be convex and compact Ifmapping T S⟶ S is continuous then there exists a fixedpoint ie there exists xlowast isin S such that T(xlowast) xlowast
Next we state and prove our main result with respect tothe periodic solution for system (2)
Theorem 3 Assume that system (2) is a ω-periodic systemand satisfies conditions (H1) minus (H9) then system (2) has apositive unique ω-periodic solution which is globally as-ymptotically stable
Proof According to the existence and uniqueness theorem ofsolutions of functional differential equations [35ndash38] we candefine a Poincare mapping T R7
+⟶ R7+ as follows
T X0( 1113857 X tω X0( 1113857 (77)
where X(tω X0) (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)) be a positive solution of system (2) with initialconditions (7) And define
S x1 x2 x3 x4 u1 u2 u3( 1113857 isin R7+
mi lexi leMi i 1 2 3 4
nj le uj leNj j 1 2 3
111386811138681113868111386811138681113868111386811138681113868
⎧⎨
⎩
⎫⎬
⎭
(78)
en it is obvious that S sub R7+ is a convex and compact set
By eorem 1 and the continuity of solution of system (2)with respect to initial conditions (7) the mappingT S⟶ S is continuous Furthermore it is not difficult toshow that system (2) has a positive unique ω minus periodicsolution which is globally asymptotic stability by usingLemma 6 and eorem 2
Remark 5 From the result of eorem 3 the feedbackcontrol items and delays have influence on the periodic ofω minus periodic system (2) at is the population densities forthe periodic system will tend to a positive ω minus periodicequilibrium when system (2) satisfies ω minus periodic initialconditions (7) and assumptions (H1) minus (H9)
Journal of Mathematics 13
5 Numerical Simulation
In this section we give some numerical simulations to illustratethe feasibility of our main results In order to facilitate theverification of eorem 3 where the system is a periodicsystem we select the periodic function as the coefficient ofsystem (2) and consider the following multidelay periodicpredator-prey model with feedback control and prey diffusion
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)minus
(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
minus (0015 + 0005 sin πt)u1(t)1113859
+(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t) (25 + 05 sin πt) minus (225 + 025 cos πt)x21113858 1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)[minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857
+(05 + 01 sin πt)u2(t)1113859
_x4(t) x4(t)[minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857
+(045 + 005 sin πt)u3(t)1113859
_u1(t) (15 + 05 cos πt) minus (16 + 04 sin πt)u1(t)
+(015 + 005 sin πt)x1(t)
_u2(t) (2 + 05 cos πt) minus (105 + 005 sin πt)u2(t)
minus (15 + 05 sin πt)x3(t)
_u3(t) (355 + 005 cos πt) minus (345 + 045 sin πt)u3(t)
minus (225 + 025 sin πt)x4(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(79)
where time delay τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 1 t isin [minus 004 0]
x2(0) 1
x3(t) sin t + 1 t isin [minus 001 0]
x4(t) sin t + 1 t isin [minus 003 0]
ui(0) 1 (i 1 2 3)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(80)
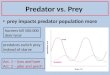
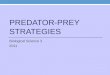
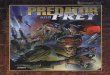
From the conditions of eorem 3 we select somespecific parameter values shown in models (79) and (80)according to the calculation Of course the choiceof parameters in the model is not unique It is not difficultto verify that system (79) satisfies the conditions of eorems1ndash3 It holds from eorems 1 and 2 that system (79) ispermanent and globally attractive By means of eorem 3system (79) has a positive unique periodic solution which isglobally asymptotic stability By using the software packageMATLAB 71 we can solve the numerical solutions of systems(79) and (80) as shown in Figures 1ndash3 Figure 1 shows that thepermanence of system (79) with initial conditions (80) andtime delay τ1 001 τ2 002 τ3 003 and τ4 004 Itis not difficult to see from Figure 2 that system (79) isglobally attractive Figure 3 shows the dynamic behavior ofsystem (79)
In general ecosystems represented by deterministicLotkandashVolterra models are not suitable for describing thereal behavior of population dynamics e feedbackcontrol variable we described above is strictly related tothe environmental noise effect It is well known that theenvironmental noise is a very important factor in mod-eling natural phenomena in ecological systems At pres-ent it is impossible to model population dynamicswithout considering the interaction between the ecolog-ical system and environmental noise always present innature In fact the environmental noise acts construc-tively producing counterintuitive effects and interestingnoise-induced phenomena such as stochastic resonancenoise-enhanced stability and resonant activation (cf[39ndash43]) In addition the study of nonlinear dynamicalsystems with external noise has found some counterin-tuitive phenomena that play a constructive role in noiseand are highly fundamental and practical interests inmany scientific fields (cf [44ndash47]) e presence of noisesources can alter the stability of the ecosystem (cf[48ndash51]) In addition this noise in general breaks thesymmetry of the ecosystem see for example [52] andmoreover it gives rise to extinction phenomena becausethe multiplicative noise has the effect of an absorbingbarrier see for example [53]
As a response to this we consider the following cor-responding stochastic predator-prey model with the mul-tiplicative noise sources
14 Journal of Mathematics
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)
minus(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
+Dξ1(t)1113859 +(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t)[(25 + 05 sin πt)
minus (225 + 025 cos πt)x2(t)1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)1113890 minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857+Dξ2(t)1113891
_x4(t) x4(t)1113890 minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857+Dξ3(t)1113891
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(81)
where ξi(t) are δ-correlated Gaussian white noise sourceswith zero mean that is langδi(t)rang 0 andlangδi(t)δi(tprime)rang Diδ(t minus tprime)δij with Di the noise intensities(here we choose all equal noise intensities that is Di D)and time delays τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 05 t isin [minus 004 0]
x2(0) 05
x3(t) sin t + 05 t isin [minus 001 0]
x4(t) sin t + 05 t isin [minus 003 0]
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(82)
x1(t)x2(t)
x3(t)x4(t)
04
05
06
07
08
09
1
11
12
13
5 10 15 20 25 30 35 40 45 500t
(a)
u1(t)u2(t)u3(t)
07
08
09
1
11
12
13
14
15
16
5 10 15 20 25 30 35 40 45 500t
(b)
Figure 1 e numerical solution of system (79) with initial condition (60) (80)
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
16
2 4 6 8 10 12 14 16 18 200t
Figure 2 Numerical solution of system (79) with different initialconditions
Journal of Mathematics 15
0
02
04
06
08
1
12
14
16x 3
(t)
02 04 06 08 1 12 14 160x2(t)
(a)
1
15
2
25
x 2(t)
05 1 15 2 250x1(t)
(b)
02
04
06
08
1
12
14
16
18
2
22
x 3(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(c)
0
02
04
06
08
1
12
14
16
x 4(t)
04 06 08 1 12 14 160 02x2(t)
(d)
02
04
06
08
1
12
14
16
18
2
x 4(t)
04 06 08 1 12 14 16 18 202x3(t)
(e)
02
04
06
08
1
12
14
16
18
2
22
x 4(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(f )
Figure 3 Continued
16 Journal of Mathematics
005
115
2
005
115
2
x2(t)x3 (t)
0
05
1
15
2
x 4(t)
(g)
051
152
25
115
225
x1(t)x2 (t)
0
05
1
15
2
25
x 3(t)
(h)
051
152
25
115
2250
05
1
15
2
25
x 4(t)
x1(t)x2 (t)
(i)
x1(t)x3 (t)
051
152
005
115
20
05
1
15
2
x 4(t)
(j)
Figure 3 Dynamic behavior of system (79)
D = 0005
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(a)
D = 001
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(b)
Figure 4 Continued
Journal of Mathematics 17
D = 002
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(c)
x1(t)x2(t)
x3(t)x4(t)
D = 004
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(d)
Figure 4 e numerical solutions of systems (81) and (82) with very low noise intensities
D = 01
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(a)
D = 02
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(b)
Figure 5 Continued
18 Journal of Mathematics
D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

behavior of predator-prey systems some models have beenstudied by many authors [18ndash24] Xu and Chaplain [18]studied a three-species predator-prey model both with timedelay and ratio-dependent ey proved that the system isuniformly persistent under some appropriate conditionsand by means of constructing suitable Lyapunov functionalsufficient conditions are derived for the global asymptoticstability of the positive equilibrium of the system In 2004Xu et al [19] studied a LotkandashVolterra predator-prey modelwith dispersion and time delays By using Ganies andMawhinrsquos continuation theorem of coincidence degreetheory and constructing the appropriate Lyapunov function
a set of easily verifiable sufficient conditions are derived forthe existence uniqueness and global stability of positiveperiodic solutions of the system In [21] Sun and Yuanconsidered a nonautomous mixture model both with ratio-dependent and diffusion It is shown that the system isuniformly and persistently related to the dispersion rateFurthermore the sufficient conditions are obtained for theglobal asymptotic stability of a periodic solution for thesystem In [23] the authors considered the following delayedtwo-predator-one-prey ratio-dependent model with patchdispersion
_x1 x1(t) a1 minus a11x1(t) minusa13x3(t)
m13x3(t) + x1(t)1113890 minus
a14x4(t)
m14x4(t) + x1(t)+D1 x2(t) minus x1(t)( 1113857
_x2 x2(t) a2 minus a22x2(t)1113858 1113859 +D2 x1(t) minus x2(t)( 1113857
_x3 x3(t) minus a3 +a31x1 t minus τ1( 1113857
m13x3 t minus τ1( 1113857 + x1 t minus τ1( 11138571113890 1113891
_x4 x4(t) minus a4 +a41x1 t minus τ2( 1113857
m14x4 t minus τ2( 1113857 + x1 t minus τ2( 11138571113890 1113891
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(1)
where xi(t)(i 1 2) represents the prey density in the i-thpatch xj(t)(j 3 4) represents the predator densityτ1 τ2 gt 0 are constant delays due to gestation Di(i 1 2)are positive constants that denote the dispersal rates aiaij(i j 1 2 3 4) and m13 and m14 are positive constantsthat denote interaction among species It is shown thatsystem (1) is uniformly persistent under some appro-priate conditions and sufficient conditions are obtainedfor the global stability of the positive equilibrium of thesystem
On the contrary in the real world ecosystems arecontinuously distributed by unpredictable forces whichcould cause a stable system to become unstable or cause thespecies to fluctuate In order to make an unstable system orequilibrium to become stable one we can introduce anindirect feedback control variables e feedback controlmechanisms can be implemented through harvesting orculling procedures or some biological control schemes So itis necessary to study models with control variables Recentlythere has been a lot of literature related to the study ofLotkandashVolterra-type system with feedback controls [25ndash30]In 2003 Gopalsamy and Weng [25] studied a two-speciescompetition system with feedback controls Some sufficientconditions are obtained for the existence of a globallyattracting positive equilibrium of the system To study theinfluence of the patch diffusion ratio-dependent andfeedback control on existence of periodic solution Xie and
Weng [26] considered a predator-prey model with patch-diffusion ratio-dependent and feedback control Bychanging the ordinary differential system into an operatorequation and using Mawhinrsquos continuation theorem theexistence of at least one positive periodic solution for thismodel is proved In order to show that whether the feedbackcontrol variables play an essential role on the persistentproperty and global stability of LotkandashVolterra cooperativesystems or not Liang [28] discussed a two-species systemwith time delays and feedback control and proved that theonly positive equilibrium point of the system is globallystable In 2016 Wang et al [29] studied a ratio-dependentLotkandashVolterra predator-prey model with feedback controlSome sufficient conditions which guarantee the globallyattractive of positive solution for the predator-prey modelare obtained In [30] Chen considered a LotkandashVolterrabiological system with feedback controls and obtained someconditions for the permanence and global attractivity of thissystem
However to the best of the authorsrsquo knowledge there arefew scholars who study the three-species multidelay Lot-kandashVolterra ratio-dependent predator-prey model withfeedback controls and prey diffusion So based on system (1)and motivated by the above works in this paper we proposeand investigate the following three-species multidelay ratio-dependent predator-prey model with feedback controls andprey diffusion
2 Journal of Mathematics
_x1(t) x1(t) r1(t) minus a11(t)x1(t) minusa13(t)x3(t)
b13(t) + x1(t)minus
a14(t)x4(t)
b14(t) + x1(t)minus d1(t)u1(t)1113890 1113891 +D1(t) x2(t) minus x1(t)( 1113857
_x2(t) x2(t) r2(t) minus a22(t)x2(t)1113858 1113859 +D2(t) x1(t) minus x2(t)( 1113857
_x3(t) x3(t) minus r3(t) minus a33(t)x3 t minus τ1( 1113857 +a31(t)x1 t minus τ2( 1113857
b13(t) + x1 t minus τ2( 1113857+ d2(t)u2(t)1113890 1113891
_x4(t) x4(t) minus r4(t) minus a44(t)x4 t minus τ3( 1113857 +a41(t)x1 t minus τ4( 1113857
b14(t) + x1 t minus τ4( 1113857+ d3(t)u3(t)1113890 1113891
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(2)
where xi(t)(i 1 2) denote the prey density in the i-thpatch and xj(t)(j 3 4) represents the predator densitye predator species is confined to patch 1 while the preyspecies can disperse between two patches ri(t)(i 1 2)denote the intrinsic growth rate of the prey species andrj(t)(j 3 4) are the death rate of the predators aii(t)(i
1 2 3 4) denote the internal competitive coefficient ofspecies a13(t) and a14(t) are the ratio of prey by predatora31(t) and a41(t) represent the nutrient absorption ratio ofthe predator after predation and Di(t) (i 1 2) are thedispersion rate of prey species ui(t)(i 1 2 3) are thefeedback control terms ei(t) fi(t) and qi(t)(i 1 2 3) arethe coefficient functions of the control equations and τ1 τ2τ3 and τ4 are positive constants representing delays All of
the coefficients in the model are continuous and positive-bounded functions defined on [0+infin)
Remark 1 It is easy to see that the designed controller of thispaper is similar to that in [29] and the designed controller in[29] is as follows
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)
_u2(t) e2(t) minus f2(t)u2(t) + q2(t)x2(t)
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x3(t)
(3)
Namely
u1(t) eminus 1113938
t
0f1(t)dt
1113946t
0e1(t) + q1(t)x1(t)1113858 1113859e
1113938t
0f1(t)dtdt + φ1(0)1113896 1113897
u2(t) eminus 1113938
t
0f2(t)dt
1113946t
0e2(t) + q2(t)x2(t)1113858 1113859e
1113938t
0f2(t)dtdt + φ2(0)1113896 1113897
u3(t) eminus 1113938
t
0f3(t)dt
1113946t
0e3(t) minus q3(t)x3(t)1113858 1113859e
1113938t
0f3(t)dtdt + φ3(0)1113896 1113897
(4)
And the designed controller in this paper is as follows
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
(5)
Journal of Mathematics 3
at is
u1(t) eminus 1113938
t
0f1(t)dt
1113946t
0e1(t) + q1(t)x1(t)1113858 1113859e
1113938t
0f1(t)dtdt + φ1(0)1113896 1113897
u2(t) eminus 1113938
t
0f2(t)dt
1113946t
0e2(t) minus q2(t)x3(t)1113858 1113859e
1113938t
0f2(t)dtdt + φ2(0)1113896 1113897
u3(t) eminus 1113938
t
0f3(t)dt
1113946t
0e3(t) minus q3(t)x4(t)1113858 1113859e
1113938t
0f3(t)dtdt + φ3(0)1113896 1113897
(6)
However the state equations are different e modelin [29] contains two preys and one predator while themodel in this paper contains one prey and two predatorsIn particular the new model contains prey diffusion anddelays
Due to biological interpretation of system (2) it isreasonable to consider only the positive solution of (2) inother words to take admissible initial conditions
xi(t) ϕi(t)ge 0 t isin [minus τ 0)
ϕi(0)gt 0 i 1 2 3 4
uj(0) φj(0)gt 0 j 1 2 3
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(7)
where τ max τ1 τ2 τ3 τ41113864 1113865Obviously the solutions of system (2) with initial data
(7) are positive for all tge 0is paper is organized as follows in Section 2 we give
the conditions for the permanence to system (2) by means ofthe theory of delay differential inequalities In Section 3 byconstructing an appropriate Lyapunov function we derivesufficient conditions for the global attractivity of positivesolution for system (2) In Section 4 by using some newanalysis method and the Brouwer fixed-point theory weobtain some conditions for the existence uniqueness andstability of a positive periodic solution for the correspondingperiodic system Some numerical solutions of the equationsdescribing the system are shown in Section 5 to verify thevalidity of the obtained criteria
2 Permanence
Firstly we introduce the following notations and definitionsFor a function g(t) defined on [t0+infin) we set
gm sup g(t) | t0 lt tltinfin1113864 1113865
gl inf g(t) | t0 lt tltinfin1113864 1113865
(8)
Definition 1 System (2) is called permanent if there existpositive constantsMi Nj mi nj (i 1 2 3 4 j 1 2 3) andT such that mi lexi(t)leMi and nj le uj(t)leNj for any
positive solution Z(t) (x1(t)) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t) of system (29) as tgtT
As a direct corollary of Lemma 21 of Chen [31] we havethe following
Lemma 1 If agt 0 bgt 0 and _xge b minus ax when tge 0 andx(0)gt 0 we have lim inf t⟶+infinx(t)ge ba If agt 0 bgt 0 and_xle b minus ax when tge 0 and x(0)gt 0 we havelim supt⟶+infinx(t)le ba
As a direct corollary of Lemma 22 of Chen [31] we havethe following
Lemma 2 If agt 0 bgt 0 and _xge b minus ax when tge 0 andx(0)gt 0 we have lim inf t⟶+infinx(t)ge ba If agt 0 bgt 0 and_xlex(b minus ax) when tge 0 and x(0)gt 0 we havelim supt⟶+infinx(t)le ba
Lemma 3 (see [32]) Assume that for y(t)gt 0 it holds that_y(t)ley(t)(λ minus 1113936
mk0 μ
ky(t minus kτ)) +D with initial condi-tions y(t) ϕ(t)ge 0 for t isin [minus mτ 0) and ϕ(0)gt 0 whereλgt 0 μk ge 0(k 0 1 m) μ 1113936
mk0 μk gt 0 and Dge 0 are
constants -en there exists a positive constant My lt +infinsuch that
lim supt⟶+infin
y(t)leMy minusD
λ+
D
λ+ ylowast
1113874 1113875exp(λmτ)lt +infin
(9)
where y ylowast is the unique solution of equationy(λ minus μy) +D 0
Lemma 4 (see [32]) Assume that for y(t)gt 0 it holds that_y(t)gey(t)[λ minus 1113936
mk0 μ
ky(t minus kτ)] If (9) holds then thereexists a positive constant my gt 0 such that for μ 1113936
mk0 μ
k gt 0we have
lim inft⟶+infin
y(t)gemy λμexp λ minus μMy1113872 1113873mτ1113966 1113967gt 0 (10)
For system (2) we let
4 Journal of Mathematics
M1 M2 maxrm1
al11
rm2
al22
1113896 1113897
N1 em1 + qm
1 M1
fl1
N2 em2
fl2
N3 em3
fl3
M3 am31M1( 1113857 bl
13 +M1( 1113857 + dm2 N2 minus rl
3
al33
times exp
middotam31M1
bl13 +M1
+ dm2 N2 minus r
l31113888 1113889τ11113890 1113891
M4 am41M1( 1113857 bl
14 +M1( 1113857 + dm3 N3 minus rl
4
al44
times exp
middotam41M1
bl14 +M1
+ dm3 N3 minus r
l41113888 1113889τ31113890 1113891
m1 rl1 minus am
13M3bl13 minus am
14M4bl14 minus dm
1 N1 minus Dm1
am11
m2 rl2 minus Dm
2am22
n1 el1 + ql
1m1
fm1
n2 el2 minus qm
2 M3
fm2
n3 el3 minus qm
3 M4
fm3
m3 al31m1( 1113857 bm
13 +m1( 1113857 + dl2n2 minus rm
3am33
times exp
middotal31m1
bm13 +m1
+ dl2n2 minus r
m3 minus a
m33M31113888 1113889τ11113890 1113891
m4 al41m1( 1113857 bm
14 +m1( 1113857 + dl3n3 minus rm
4am44
times exp
middotal41m1
bm14 +m1
+ dl3n3 minus r
m4 minus a
m44M41113888 1113889τ31113890 1113891
(11)
Next we state and prove our main result with respect tothe permanent for system (2)
Theorem 1 Suppose that system (2) satisfies the initialconditions (7) and following assumptions
(H1) rl3 lt (am
31M1)(bl13 +M1) + dm
2 N2
(H2) rl4 lt (am
41M1)(bl14 +M1) + dm
3 N3
(H3) rl1 gt am
13M3bl13 + am
14M4bl14 + dm
1 N1 +Dm1
(H4) rl2 gtDm
2
(H5) el2 gt qm
2 M3
(H6) el3 gt qm
3 M4
(H7) rm3 lt (al
31m1)(bm13 +m1) + dl
2n2
(H8) rm4 lt (al
41m1)(bm14 +m1) + dl
3n3
-en system (2) is permanent
Proof According to the first and the second equations ofsystem (2) we define W1(t) max x1(t) x2(t)1113864 1113865 and cal-culate the upper right derivative of W1(t) along the positivesolution of system (2) and we have that
(P1) if x1(t)gex2(t) then
D+W1(t) _x1(t) x1(t) r1(t) minus a11(t)x1(t)1113858
minusa13(t)x3(t)
b13(t) + x1(t)minus
a14(t)x4(t)
b14(t) + x1(t)
minus d1(t)u1(t)1113859 +D1(t) x2(t) minus x1(t)( 1113857
lex1(t) r1(t) minus a11(t)x1(t)1113858 1113859
lex1(t) rm1 minus a
l11x1(t)1113960 1113961
W1(t) rm1 minus a
l11W1(t)1113960 1113961
(12)
(P2) if x1(t)lex2(t) then
D+W1(t) _x2(t) x2(t) r2(t) minus a22(t)x2(t)1113858 1113859
+D2(t) x1(t) minus x2(t)( 1113857
le x2(t) r2(t) minus a22(t)x2(t)1113858 1113859
le x2(t) rm2 minus a
l22x2(t)1113960 1113961
W1(t) rm2 minus a
l22W1(t)1113960 1113961
(13)
It follows from (P1) and (P2) that
D+W1(t)leW1(t) r
mi minus a
liiW1(t)1113960 1113961 i 1 2 (14)
By (14) we can also deduce the following
(A) If W1(0) max x1(0) x2(0)1113864 1113865leM1 then we havemax x1(t) x2(t)1113864 1113865leM1 tge 0
(B) If W1(0) max x1(0) x2(0)1113864 1113865gtM1 take appro-priate αgt 0 we have the following three possibilities
(a) W1(0) x1(0)gtM1 (x1(0)gt x2(0))(b) W1(0) x2(0)gtM1 (x1(0)lt x2(0))(c) W1(0) x1(0) x2(0)gtM1
If (a) holds then there exists εgt 0 t isin [0 ε) such thatW1(t) x1(t)gtM1 en we get
Journal of Mathematics 5
D+W1(t) _x1(t)le a
l11W1(t)
rm1
al11minus W1(t)1113890 1113891le minus αlt 0
(15)
Similarly if (b) holds there exists εgt 0 t isin [0 ε) andW1(t) x2(t)gtM1 to derive
D+W1(t) _x2(t)le a
l22W1(t)
rm2
al22minus W1(t)1113890 1113891le minus αlt 0
(16)
Moreover in case (c) we also have
D+W1(t) _xi(t)le a
liiW1(t)
rmi
alii
minus W1(t)1113890 1113891le minus αlt 0 i 1 or 2
(17)
From what we have discussed above it yields that ifW1(0)gtM1 then W1(t) is strictly monotone decreasingwith speed at least α so there exists T1 gt 0 such that for anytime tgeT1 W1(t) max x1(t) x2(t)1113864 1113865leM1 which admits
lim supt⟶+infin
x1(t)leM1 M2 maxrm1
al11
rm2
al22
1113896 1113897 (18)
lim supt⟶+infin
x2(t)leM1 M2 maxrm1
al11
rm2
al22
1113896 1113897 (19)
According to the fifth equation of system (2) we have
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)le em1 minus f
l1u1(t) + q
m1 M1
(20)
Using Lemma 1 we can deduce
lim supt⟶+infin
u1(t)leem1 + qm
1 M1
fl1
N1 (21)
Similarly in light of the last two equations of system (26)we then have
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
le e2(t) minus f2(t)u2(t)le em2 minus f
l2u2(t)
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
le e3(t) minus f3(t)u3(t)le em3 minus f
l3u3(t)
(22)
By utilizing Lemma 1 again we can get
lim supt⟶+infin
u2(t)leem2
fl2 N2 (23)
lim supt⟶+infin
u3(t)leem3
fl3 N3 (24)
From the third and fourth equations of system (2) wehave
_x3(t) x3(t)1113890 minus r3(t) minus a33(t)x3 t minus τ1( 1113857
+a31(t)x1 t minus τ2( 1113857
b13(t) + x1 t minus τ2( 1113857+ d2(t)u2(t)1113891
lex3(t) minus rl3 minus a
l33x3 t minus τ1( 1113857 +
am31M1
bl13 +M1
+ dm2 N21113890 1113891
_x4(t) x4(t)1113890 minus r4(t) minus a44(t)x4 t minus τ3( 1113857
+a41(t)x1 t minus τ4( 1113857
b14(t) + x1 t minus τ4( 1113857+ d3(t)u3(t)1113891
lex4(t) minus rl4 minus a
l44x4 t minus τ3( 1113857 +
am41M1
bl14 +M1
+ dm3 N31113890 1113891
(25)
By Lemma 3 combining with (H1) and (H2) we have
lim supt⟶+infin
x3(t)leam31M1 bl
13 +M1( 1113857 + dm2 N2 minus rl
3
al33
times expam31M1
bl13 +M1
dm2 N2 minus r
l31113888 1113889τ11113890 1113891
M3
(26)
lim supt⟶+infin
x4(t)leam41M1 bl
14 +M1( 1113857 + dm3 N3 minus rl
4
al44
times expam41M1
bl14 +M1
+ dm3 N3 minus r
l41113888 1113889τ31113890 1113891
M4
(27)
On the contrary from the first equation of system (2) itfollows that
_x1(t) x1(t) r1(t) minus a11(t)x1(t)1113858
minusa13(t)x3(t)
b13(t) + x1(t)minus
a14(t)x4(t)
b14(t) + x1(t)
minus d1(t)u1(t)1113859 +D1(t) x2(t) minus x1(t)( 1113857
gex1(t) r1(t) minus a11(t)x1(t) minusa13(t)x3(t)
b13(t)1113890
minusa14(t)x4(t)
b14(t)minus d1(t)u1(t) minus D1(t)1113891
gex1(t) rl1 minus a
m11x1(t) minus
am13M3
bl13
minusam14M4
bl14
minus dm1 N1 minus D
m11113890 1113891
(28)
By Lemma 2 and assumption (H3) we have
6 Journal of Mathematics
lim inft⟶+infin
x1(t)gerl1
am11minus
am13M3
bl13a
m11minus
am14M4
bl14a
m11
minusdm1 N1
am11
minusDm
1am11
m1
(29)
For the second equation of system (2) it holds that
_x2(t) x2(t) r2(t) minus a22(t)x2(t)1113858 1113859
+D2(t) x1(t) minus x2(t)( 1113857
gex2(t) r2(t) minus a22(t)x2(t) minus D2(t)1113858 1113859
gex2(t) rl2 minus a
m22x2(t) minus D
m21113960 1113961
(30)
From assumption (H4) and by Lemma 2 we can get
lim inft⟶+infin
x2(t)gerl2 minus Dm
2am22
m2 (31)
For the fifth equation of system (2) we have
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)
ge el1 minus f
m1 u1(t) + q
l1m1
(32)
By Lemma 1 it holds that
lim inft⟶+infin
u1(t)geel1 + ql
1m1
fm1
n1 (33)
For the sixth and the seventh equations of system (2) wecan obtain
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
ge el2 minus f
m2 u2(t) minus q
m2 M3
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
ge el3 minus f
m3 u3(t) minus q
m3 M4
(34)
By Lemma 1 (H5) and (H6) we have
lim inft⟶+infin
u2(t)geel2 minus qm
2 M3
fm2
n2 (35)
lim inft⟶+infin
u3(t)geel3 minus qm
3 M4
fm3
n3 (36)
According to the third and the fourth equations ofsystem (2) we have
_x3(t) x3(t)1113890 minus r3(t) minus a33(t)x3 t minus τ1( 1113857
+a31(t)x1 t minus τ2( 1113857
b13(t) + x1 t minus τ2( 1113857+ d2(t)u2(t)
ge x3(t) minus rm3 minus a
m33x3 t minus τ1( 1113857 +
al31m1
bm13 +m1
+ dl2n21113890 1113891
_x4(t) x4(t)1113890 minus r4(t) minus a44(t)x4 t minus τ3( 1113857
+a41(t)x1 t minus τ4( 1113857
b14(t) + x1 t minus τ4( 1113857+ d3(t)u3(t)1113891
ge x4(t)1113890 minus rm4 minus a
m44x4 t minus τ3( 1113857
+al41m1
bm14 +m1
+ dl3n31113891
(37)
Using Lemma 4 (H7) and (H8) we also derive that
lim inft⟶+infin
x3(t)geal31m1( 1113857 bm
13 +m1( 1113857 + dl2n2 minus rm
3am33
times expal31m1
bm13 +m1
+ dl2n2 minus r
m3 minus a
m33M31113888 1113889τ11113890 1113891
m3
(38)
lim inft⟶+infin
x4(t)geal41m1( 1113857 bm
14 +m1( 1113857 + dl3n3 minus rm
4am44
times expal41m1
bm14 +m1
+ dl3n3 minus r
m4 minus a
m44M41113888 11138891113890 1113891τ3
m4
(39)
Summarizing (18)ndash(39) we complete the induction ofeorem 1
Remark 2 It is obvious that the proof method for Lemma21 in [29] is the differential inequality theory while that ofthis article is the delay differential inequality theory Fromthe result of eorem 1 the feedback control items anddelays have influence on the permanence of system (2) Inother words the densities of the prey and predator pop-ulations are uniformly bounded when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H8)
3 Global Attractivity
In this section the global attractivity of system (2) will bestudied To get the sufficient conditions for global attractivity ofsystem (2) we firstly give the following definition and Lemma
Journal of Mathematics 7
Definition 2 System (2) is said to be globally attractive ifthere exists a positive solution
X(t) x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)( 1113857
(40)
of system (2) such that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0
limt⟶+infin
ui(t) minus vi(t)1113868111386811138681113868
1113868111386811138681113868 0
i 1 2 3 4 j 1 2 3
(41)
for any other positive solutionY(t) (y1(t) y2(t) y3(t) y4(t) v1(t) v2(t) v3(t)) of sys-tem (2)
Lemma 5 (see [33]) If the function f(t) R+⟶ R isuniformly continuous and the limit limt⟶+infin 1113938
t
0 f(s)ds existsand is finite then limt⟶+infinf(t) 0
Next we state and prove our main result with respect tothe global attractivity for system (2)
Theorem 2 Assume that system (2) satisfies (H1)minus (H8) andthe following conditions
(H9) Ai gt 0 Bj gt 0 (i 1 2 3 4 j 1 2 3) where
B1 fl1 minus d
m1
B2 fl2 minus d
m2 minus M3d
m2 a
m33τ1
B3 fl3 minus d
m3 minus M4d
m3 a
m44τ3
A1 al11 minus
am13M3
bl13 +m1( 1113857
2 minusam14M4
bl14 +m1( 1113857
2 minusDm
2m2
minusam31b
m13
bl13 +m1( 1113857
2
minusM3a
m31a
m33τ1
bl13 +m1
minusam41b
m14
bl14 +m1( 1113857
2 minusM4a
m41a
m44τ3
bl14 +m1
minus qm1
A2 al22 minus Dm
1m1
A3 al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
+ dm2 N21113888 1113889a
m33τ1
minus M3 am33( 1113857
2τ1 minusam13b
m13 + am
13M1
bl13 +m1( 1113857
2 minus qm2
A4 al44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113888 1113889a
m44τ3
minus M4 am44( 1113857
2τ3 minusam14b
m14 + am
14M1
bl14 +m1( 1113857
2 minus qm3
(42)
-en system (2) is globally attractive
Proof Suppose that (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t)
u3(t)) and (y1(t) y2(t) y3(t) y4(t) v1(t) v2(t) v3(t)) areany two different positive solutions of system (2)en from
eorem 1 there exist positive constants Mi mi Njnj(i 1 2 3 4 j 1 2 3) and T such that
mi lexi(t) yi(t)leMi i 1 2 3 4
nj le uj(t) vj(t)leNj j 1 2 3(43)
We defineV1(t) lnx1(t) minus lny1(t)
11138681113868111386811138681113868111386811138681113868
V2(t) lnx2(t) minus lny2(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎨
⎩ (44)
Calculating the upper-right derivative of V1(t) andV2(t) along the solution of system (2) we have
1113944
2
i1D+Vi(T) 1113944
2
i1D+ lnxi(t) minus lnyi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961
le sgn x1(t) minus y1(t)1113864 11138651113890 minus a11(t) x1(t) minus y1(t)( 1113857
minusa13(t)b13(t) + a13(t)y1(t)( 1113857 x3(t) minus y3(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa13(t)y3(t) x1(t) minus y1(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa13(t)y3(t) x1(t) minus y1(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa14(t)b14(t) + a14(t)y1(t)( 1113857 x4(t) minus y4(t)( 1113857
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857
minusa14(t)y4(t) x1(t) minus y1(t)( 1113857
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857
minus d1(t) u1(t) minus v1(t)( 1113857 +D1(t)x2(t)
x1(t)minus
y2(t)
y1(t)1113888 11138891113891
+ sgn x2(t) minus y2(t)1113864 1113865 minus a22(t) x2(t) minus y2(t)( 11138571113858
+D2(t)x1(t)
x2(t)minus
y1(t)
y2(t)1113888 11138891113891
le minus a11(t) minusa13(t)y3(t)
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 11138571113888
minusa14(t)y4(t)
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 11138571113889
times x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868 minus a22(t) x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868
+a13(t)b13(t) + a13(t)y1(t)
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+a14(t)b14(t) + a14(t)y1(t)
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+ d1(t) u1(t) minus v1(t)1113868111386811138681113868
1113868111386811138681113868 + 1113957D1(t) + 1113957D2(t)
(45)where
8 Journal of Mathematics
1113957D1(t)
D1(t)x2(t)
x1(t)minus
y2(t)
y1(t)1113888 1113889 x1(t)gty1(t)
D1(t)y2(t)
y1(t)minus
x2(t)
x1(t)1113888 1113889 x1(t)lty1(t)
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
1113957D2(t)
D2(t)x1(t)
x2(t)minus
y1(t)
y2(t)1113888 1113889 x2(t)gty2(t)
D2(t)y1(t)
y2(t)minus
x1(t)
x2(t)1113888 1113889 x2(t)lty2(t)
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
(46)
Next we discuss 1113957D1(t) under the following three cases
(a) If x1(t)gty1(t) then
1113957D1(t)leD1(t)
x1(t)x2(t) minus y2(t)( 1113857
leDm
1m1
x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868
(47)
(b) If x1(t)lty1(t) then
1113957D1(t)leD1(t)
y1(t)y2(t) minus x2(t)( 1113857le
Dm1
m1x2(t) minus y2(t)
11138681113868111386811138681113868111386811138681113868
(48)
(c) If x1(t) y1(t) the same conclusion as (a) and (b)holds
Combining the conclusions in (a)ndash(c) we have
1113957D1(t)leDm
1m1
x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868 (49)
A similar argument shows that
1113957D2(t)leDm
2 (t)
mlsquo2x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868 (50)
By means of (45)ndash(50) we have
1113944
2
i1D+Vi(t)le minus a
l11 minus
am13M3
bl13 +m1( 1113857
2 minusam14M4
bl14 +m1( 1113857
2 minusDm
2m2
⎛⎝ ⎞⎠
times x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868 minus al22 minus
Dm1
m11113888 1113889 x2(t) minus y2(t)
11138681113868111386811138681113868111386811138681113868
+am13b
m13 + am
13M1
bl13 +m1( 1113857
2 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am14b
m14 + am
14M1
bl14 +m1( 1113857
2 x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868
+ dm1 u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868
(51)
Define
V31(t) lnx3(t) minus lny3(t)1113868111386811138681113868
1113868111386811138681113868 (52)
Calculating the upper right derivative of V31(t) along thesolution of system (2) it follows thatD+V31(t) sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3 t minus τ1( 1113857(1113858
minus y3 t minus τ1( 11138571113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ d2(t) u2(t) minus v2(t)( 11138571113859
sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3(t) minus y3(t)( 11138571113858
+ d2(t) u2(t) minus v2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+a33(t)1113946t
tminus τ1_x3(θ) minus _y3(θ)( 1113857dθ1113891
sgn x3(t) minus y3(t)1113864 1113865minus a33(t) x3(t) minus y3(t)( 11138571113859
+ d2(t) u2(t) minus v2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ a33(t)1113946t
tminus τ1x3(θ)1113890 minus r3(θ) minus a33(θ)x3 θ minus τ1( 11138571113888
+a31(θ)x1 θ minus τ2( 1113857
b13(θ) + x1 θ minus τ2( 1113857+ d2(θ)u2(θ)1113891
minus y3(θ)1113890 minus r3(θ) minus a33(θ)y3 θ minus τ1( 1113857
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)11138911113889dθ1113891
sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3(t) minus y3(t)( 11138571113858
+ d2(t) u2(t) minus y2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ a33(t)1113946t
tminus τ1x3(θ) minus y3(θ)( 1113857(
times 1113890 minus r3(θ) minus a33(θ)y3 θ minus τ1( 1113857
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
Journal of Mathematics 9
+ x3(θ)1113890 minus a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 1113857( 1113857
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857( 1113857
+ d2(θ) u2(θ) minus v2(θ)( 111385711138591113857dθ⎤⎦
le minus a33(t) x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 + d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ a33(t)1113946t
tminus τ11113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891 x3(θ) minus y3(θ)
11138681113868111386811138681113868111386811138681113868
+ x3(θ) a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+ d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(53)
Define
V32(t) 1113946t
tminus τ11113946
t
sa33 s + τ1( 1113857 1113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
times x3(θ) minus y3(θ)1113868111386811138681113868
1113868111386811138681113868
+ x3(θ)1113890a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
1113868111386811138681113868⎤⎦⎞⎠dθ ds
(54)
From (53) and (54) we have
1113944
2
i1D+V3i(t)le minus a33(t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+ d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ1a33 s + τ1( 1113857ds1113890r3(t) + a33(t)y3 t minus τ1( 1113857
+a31(t)y1 t minus τ2( 1113857
b13(t) + y1 t minus τ2( 1113857+ d2(t)v2(t)1113891
times x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 +M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
times a33(t) x3 t minus τ1( 1113857 minus y3 t minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
timesa31(t)
b13(t) + x1 t minus τ2( 1113857x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds times d2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(55)
We also define
V33(t) 1113946t
tminus τ2
a31 w + τ2( 1113857b13 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)( 1113857 b13 w + τ2( 1113857 + y1(w)( 1113857
timesx1(w) minus y1(w)|dw
+M3 1113946t
tminus τ11113946
w+τ1
wa33 s + τ1( 1113857a33 w + τ1( 1113857
times x3(w) minus y3(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M3 1113946t
tminus τ21113946
w+τ2
w+τ2minus τ1a33 s + τ1( 1113857
a31 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(56)
10 Journal of Mathematics
and let
V3(t) V31(t) + V32(t) + V33(t) (57)
According to (55) and (56) calculating the upper rightderivative of V3(t) we have
D+V3(t)le minus a
l33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+dm2 N21113889 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds
minus M3am33 1113946
t+τ1
ta
m33 s + τ1( 1113857ds1113891 x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3am31
bl13 +m1
⎡⎣
times1113946t+τ2
t+τ2minus τ1a
m33 s + τ1( 1113857ds1113891 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm2 +M3d
m2 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds1113890 1113891
times u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
le minus al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+ dm2 N21113857a
m33τ1 minus M3 a
m33( 1113857
2τ11113961 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3a
m31a
m33τ1
bl13 +m1
⎛⎝ ⎞⎠ x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868
+ dm2 +M3d
m2 a
m33τ1( 1113857 u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(58)
Similarly we define
V41(t) lnx4(t) minus lny4(t)1113868111386811138681113868
1113868111386811138681113868 (59)
Calculating the upper right derivative of V41(t) along thesolution of system (2) we get
D+V41(t) sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4 t minus τ3( 1113857(1113858
minus y4 t minus τ3( 11138571113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+d3(t) u3(t) minus v3(t)( 11138571113859
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+a44(t)1113946t
tminus τ3_x4(θ) minus _y4(θ)( 1113857dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus r4(θ) minus a44(θ)x4 θ minus τ3( 11138571113858(
+a41(θ)x1 θ minus τ4( 1113857
b14(θ) + x1 θ minus τ4( 1113857+ d3(θ)u3(θ)1113891
minus y4(θ) minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)11138911113889dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t) minus y4(t)( 11138571113858
+ d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus y4(θ)( 1113857
times minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)1113891
+ x4(θ) minus a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 1113857( 11138571113858
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857( 1113857
+d3(θ) u3(θ) minus v3(θ)( 111385711138591113857dθ1113859
le minus a44(t) x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 + d3(t) u3(t) minus v3(t)1113868111386811138681113868
1113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ a44(t)1113946t
tminus τ3r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+ d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(60)
Journal of Mathematics 11
We define
V42(t) 1113946t
tminus τ31113946
t
sa44 s + τ3( 1113857 r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ ds
(61)
By (60) and (61) we have
1113944
2
i1D+V4i(t)le minus a44(t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868 + d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ3a44 s + τ3( 1113857ds times 1113890r4(t) + a44(t)y4 t minus τ3( 1113857
+a41(t)y1 t minus τ4( 1113857
b14(t) + y1 t minus τ4( 1113857+ d3(t)v3(t)1113891
times x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 +M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
times a44(t) x4 t minus τ3( 1113857 minus y4 t minus τ3( 11138571113868111386811138681113868
1113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
timesa41(t)
b14(t) + x1 t minus τ4( 1113857x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds times d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(62)
Let
V4(t) V41(t) + V42(t) + V43(t) (63)
where
V43(t) 1113946t
tminus τ4
a41 w + τ4( 1113857b14 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)( 1113857 b14 w + τ4( 1113857 + y1(w)( 1113857
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868dw
+M4 1113946t
tminus τ31113946
w+τ3
wa44 s + τ3( 1113857a44 w + τ3( 1113857
times x4(w) minus y4(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M4 1113946t
tminus τ41113946
w+τ4
w+τ4minus τ3a44 s + τ3( 1113857
a41 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(64)
By (62) and (64) we have
D+V4(t)le minus a
l44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113890 11138911113888
times 1113946t
tminus τ3a
m44 s + τ3( 1113857ds
minus M4am44 1113946
t+τ3
ta
m44 s + τ3( 1113857ds1113889 x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+am41b
m14
bl14 +m1( 1113857
2 +M4am41
bl14 +m1
⎛⎝
times1113946t+τ4
t+τ4 minus τ3a
m44 s + τ3( 1113857ds1113889 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm3 +M4d
m3 1113946
t
tminus τ3a
m44 s + τ3( 1113857ds1113888 1113889 u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(65)
Moreover define V5(t) V6(t) andV7(t) by
V5(t) ln u1(t) minus ln v1(t)1113868111386811138681113868
1113868111386811138681113868
V6(t) ln u2(t) minus ln v2(t)1113868111386811138681113868
1113868111386811138681113868
V7(t) ln u3(t) minus ln v3(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
(66)
Calculating the upper right derivative of V5(t) V6(t)and V7(t) along the solutions of system (2) it holds that
D+V5(t)le sgn u1(t) minus v1(t)( 1113857 minus f1(t) u1(t)(1113858
minus v1(t)1113857 + q1(t) x1(t) minus y1(t)( 11138571113859
le minus fl1(t) u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868 + q
m1 (t) x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
(67)
D+V6(t)le sgn u2(t) minus v2(t)( 1113857 minus f2(t) u2(t)(1113858
minus v2(t)1113857 minus q2(t) x3(t) minus y3(t)( 11138571113859
le minus fl2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
+ qm2 (t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
(68)
12 Journal of Mathematics
D+V7(t)le sgn u3(t) minus v3(t)( 1113857 minus f3(t) u3(t)(1113858
minus v3(t)1113857 minus q3(t) x4(t) minus y4(t)( 11138571113859
le minus fl3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+ qm3 (t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
(69)
Finally we define a Lyapunov function as follows
V(t) 11139447
i1Vi(t) (70)
From (51) (58) (65) and (67)ndash(69) we can get that forall tgeT + τ
D+V(t)le minus 1113944
4
i1Ai xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 minus 1113944
3
j1Bj uj(t) minus vj(t)
11138681113868111386811138681113868
11138681113868111386811138681113868
(71)
In view of conditions (H9) of eorem 2 there exists aconstant αgt 0 and Tlowast gtT + τ such that for all tgeTlowast it holdsthat
Ai ge αgt 0
Bj ge αgt 0
i 1 2 3 4 j 1 2 3
(72)
Integrating fromTlowast to t on both sides of (71) and by (72)we have
V(t) + α1113946t
Tlowast1113944
4
i1xi(s) minus yi(s)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(s) minus vj(s)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠ds
leV Tlowast
( 1113857lt +infin
(73)
erefore V(t) is bounded on [Tlowast+infin) and we have
1113946infin
Tlowast1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠dsleV(T)
αlt +infin
(74)
By (74) we also have
1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113874 1113875 isin L1(T+infin)
(75)
Applying eorem 1 we can obtain that |xi(t) minus yi(t)||uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 and their derivativesremain bounded on [Tlowast+infin) and |xi(t) minus yi(t)| and|uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 are uniformly con-tinuous on [Tlowast+infin) By Lemma 5 we can conclude that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0 i 1 2 3 4
limt⟶+infin
uj(t) minus vj(t)11138681113868111386811138681113868
11138681113868111386811138681113868 0 j 1 2 3(76)
is completes the proof and the solution of system (2)is globally attractive
Remark 3 From the result ofeorem 2 the feedback controlitems and delays have influence on the globally attractive of
system (2) namely the population densities for the system willapproach to a positive equilibrium when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H9)
Remark 4 It should not be difficult to see that the methodand skills of constructing a suitable Lyapunov function in thepaper are very different with those of [29] and the method ofconstructing Lyapunov function in [29] cannot be used inthis manuscript
4 Periodic Solution
Assuming that coefficients of system (2) are positive con-tinuous and ω minus periodic functions then system (2) ischanged to the ω minus periodic system In this section we shallobtain conditions for the existence uniqueness and stabilityof a positive periodic for system (2) by using the fixed-pointtheory and some new analysis method For convenience wegive firstly the following lemma
Lemma 6 (see [34]) Let S sub Rn be convex and compact Ifmapping T S⟶ S is continuous then there exists a fixedpoint ie there exists xlowast isin S such that T(xlowast) xlowast
Next we state and prove our main result with respect tothe periodic solution for system (2)
Theorem 3 Assume that system (2) is a ω-periodic systemand satisfies conditions (H1) minus (H9) then system (2) has apositive unique ω-periodic solution which is globally as-ymptotically stable
Proof According to the existence and uniqueness theorem ofsolutions of functional differential equations [35ndash38] we candefine a Poincare mapping T R7
+⟶ R7+ as follows
T X0( 1113857 X tω X0( 1113857 (77)
where X(tω X0) (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)) be a positive solution of system (2) with initialconditions (7) And define
S x1 x2 x3 x4 u1 u2 u3( 1113857 isin R7+
mi lexi leMi i 1 2 3 4
nj le uj leNj j 1 2 3
111386811138681113868111386811138681113868111386811138681113868
⎧⎨
⎩
⎫⎬
⎭
(78)
en it is obvious that S sub R7+ is a convex and compact set
By eorem 1 and the continuity of solution of system (2)with respect to initial conditions (7) the mappingT S⟶ S is continuous Furthermore it is not difficult toshow that system (2) has a positive unique ω minus periodicsolution which is globally asymptotic stability by usingLemma 6 and eorem 2
Remark 5 From the result of eorem 3 the feedbackcontrol items and delays have influence on the periodic ofω minus periodic system (2) at is the population densities forthe periodic system will tend to a positive ω minus periodicequilibrium when system (2) satisfies ω minus periodic initialconditions (7) and assumptions (H1) minus (H9)
Journal of Mathematics 13
5 Numerical Simulation
In this section we give some numerical simulations to illustratethe feasibility of our main results In order to facilitate theverification of eorem 3 where the system is a periodicsystem we select the periodic function as the coefficient ofsystem (2) and consider the following multidelay periodicpredator-prey model with feedback control and prey diffusion
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)minus
(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
minus (0015 + 0005 sin πt)u1(t)1113859
+(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t) (25 + 05 sin πt) minus (225 + 025 cos πt)x21113858 1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)[minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857
+(05 + 01 sin πt)u2(t)1113859
_x4(t) x4(t)[minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857
+(045 + 005 sin πt)u3(t)1113859
_u1(t) (15 + 05 cos πt) minus (16 + 04 sin πt)u1(t)
+(015 + 005 sin πt)x1(t)
_u2(t) (2 + 05 cos πt) minus (105 + 005 sin πt)u2(t)
minus (15 + 05 sin πt)x3(t)
_u3(t) (355 + 005 cos πt) minus (345 + 045 sin πt)u3(t)
minus (225 + 025 sin πt)x4(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(79)
where time delay τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 1 t isin [minus 004 0]
x2(0) 1
x3(t) sin t + 1 t isin [minus 001 0]
x4(t) sin t + 1 t isin [minus 003 0]
ui(0) 1 (i 1 2 3)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(80)
From the conditions of eorem 3 we select somespecific parameter values shown in models (79) and (80)according to the calculation Of course the choiceof parameters in the model is not unique It is not difficultto verify that system (79) satisfies the conditions of eorems1ndash3 It holds from eorems 1 and 2 that system (79) ispermanent and globally attractive By means of eorem 3system (79) has a positive unique periodic solution which isglobally asymptotic stability By using the software packageMATLAB 71 we can solve the numerical solutions of systems(79) and (80) as shown in Figures 1ndash3 Figure 1 shows that thepermanence of system (79) with initial conditions (80) andtime delay τ1 001 τ2 002 τ3 003 and τ4 004 Itis not difficult to see from Figure 2 that system (79) isglobally attractive Figure 3 shows the dynamic behavior ofsystem (79)
In general ecosystems represented by deterministicLotkandashVolterra models are not suitable for describing thereal behavior of population dynamics e feedbackcontrol variable we described above is strictly related tothe environmental noise effect It is well known that theenvironmental noise is a very important factor in mod-eling natural phenomena in ecological systems At pres-ent it is impossible to model population dynamicswithout considering the interaction between the ecolog-ical system and environmental noise always present innature In fact the environmental noise acts construc-tively producing counterintuitive effects and interestingnoise-induced phenomena such as stochastic resonancenoise-enhanced stability and resonant activation (cf[39ndash43]) In addition the study of nonlinear dynamicalsystems with external noise has found some counterin-tuitive phenomena that play a constructive role in noiseand are highly fundamental and practical interests inmany scientific fields (cf [44ndash47]) e presence of noisesources can alter the stability of the ecosystem (cf[48ndash51]) In addition this noise in general breaks thesymmetry of the ecosystem see for example [52] andmoreover it gives rise to extinction phenomena becausethe multiplicative noise has the effect of an absorbingbarrier see for example [53]
As a response to this we consider the following cor-responding stochastic predator-prey model with the mul-tiplicative noise sources
14 Journal of Mathematics
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)
minus(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
+Dξ1(t)1113859 +(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t)[(25 + 05 sin πt)
minus (225 + 025 cos πt)x2(t)1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)1113890 minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857+Dξ2(t)1113891
_x4(t) x4(t)1113890 minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857+Dξ3(t)1113891
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(81)
where ξi(t) are δ-correlated Gaussian white noise sourceswith zero mean that is langδi(t)rang 0 andlangδi(t)δi(tprime)rang Diδ(t minus tprime)δij with Di the noise intensities(here we choose all equal noise intensities that is Di D)and time delays τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 05 t isin [minus 004 0]
x2(0) 05
x3(t) sin t + 05 t isin [minus 001 0]
x4(t) sin t + 05 t isin [minus 003 0]
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(82)
x1(t)x2(t)
x3(t)x4(t)
04
05
06
07
08
09
1
11
12
13
5 10 15 20 25 30 35 40 45 500t
(a)
u1(t)u2(t)u3(t)
07
08
09
1
11
12
13
14
15
16
5 10 15 20 25 30 35 40 45 500t
(b)
Figure 1 e numerical solution of system (79) with initial condition (60) (80)
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
16
2 4 6 8 10 12 14 16 18 200t
Figure 2 Numerical solution of system (79) with different initialconditions
Journal of Mathematics 15
0
02
04
06
08
1
12
14
16x 3
(t)
02 04 06 08 1 12 14 160x2(t)
(a)
1
15
2
25
x 2(t)
05 1 15 2 250x1(t)
(b)
02
04
06
08
1
12
14
16
18
2
22
x 3(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(c)
0
02
04
06
08
1
12
14
16
x 4(t)
04 06 08 1 12 14 160 02x2(t)
(d)
02
04
06
08
1
12
14
16
18
2
x 4(t)
04 06 08 1 12 14 16 18 202x3(t)
(e)
02
04
06
08
1
12
14
16
18
2
22
x 4(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(f )
Figure 3 Continued
16 Journal of Mathematics
005
115
2
005
115
2
x2(t)x3 (t)
0
05
1
15
2
x 4(t)
(g)
051
152
25
115
225
x1(t)x2 (t)
0
05
1
15
2
25
x 3(t)
(h)
051
152
25
115
2250
05
1
15
2
25
x 4(t)
x1(t)x2 (t)
(i)
x1(t)x3 (t)
051
152
005
115
20
05
1
15
2
x 4(t)
(j)
Figure 3 Dynamic behavior of system (79)
D = 0005
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(a)
D = 001
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(b)
Figure 4 Continued
Journal of Mathematics 17
D = 002
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(c)
x1(t)x2(t)
x3(t)x4(t)
D = 004
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(d)
Figure 4 e numerical solutions of systems (81) and (82) with very low noise intensities
D = 01
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(a)
D = 02
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(b)
Figure 5 Continued
18 Journal of Mathematics
D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

_x1(t) x1(t) r1(t) minus a11(t)x1(t) minusa13(t)x3(t)
b13(t) + x1(t)minus
a14(t)x4(t)
b14(t) + x1(t)minus d1(t)u1(t)1113890 1113891 +D1(t) x2(t) minus x1(t)( 1113857
_x2(t) x2(t) r2(t) minus a22(t)x2(t)1113858 1113859 +D2(t) x1(t) minus x2(t)( 1113857
_x3(t) x3(t) minus r3(t) minus a33(t)x3 t minus τ1( 1113857 +a31(t)x1 t minus τ2( 1113857
b13(t) + x1 t minus τ2( 1113857+ d2(t)u2(t)1113890 1113891
_x4(t) x4(t) minus r4(t) minus a44(t)x4 t minus τ3( 1113857 +a41(t)x1 t minus τ4( 1113857
b14(t) + x1 t minus τ4( 1113857+ d3(t)u3(t)1113890 1113891
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(2)
where xi(t)(i 1 2) denote the prey density in the i-thpatch and xj(t)(j 3 4) represents the predator densitye predator species is confined to patch 1 while the preyspecies can disperse between two patches ri(t)(i 1 2)denote the intrinsic growth rate of the prey species andrj(t)(j 3 4) are the death rate of the predators aii(t)(i
1 2 3 4) denote the internal competitive coefficient ofspecies a13(t) and a14(t) are the ratio of prey by predatora31(t) and a41(t) represent the nutrient absorption ratio ofthe predator after predation and Di(t) (i 1 2) are thedispersion rate of prey species ui(t)(i 1 2 3) are thefeedback control terms ei(t) fi(t) and qi(t)(i 1 2 3) arethe coefficient functions of the control equations and τ1 τ2τ3 and τ4 are positive constants representing delays All of
the coefficients in the model are continuous and positive-bounded functions defined on [0+infin)
Remark 1 It is easy to see that the designed controller of thispaper is similar to that in [29] and the designed controller in[29] is as follows
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)
_u2(t) e2(t) minus f2(t)u2(t) + q2(t)x2(t)
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x3(t)
(3)
Namely
u1(t) eminus 1113938
t
0f1(t)dt
1113946t
0e1(t) + q1(t)x1(t)1113858 1113859e
1113938t
0f1(t)dtdt + φ1(0)1113896 1113897
u2(t) eminus 1113938
t
0f2(t)dt
1113946t
0e2(t) + q2(t)x2(t)1113858 1113859e
1113938t
0f2(t)dtdt + φ2(0)1113896 1113897
u3(t) eminus 1113938
t
0f3(t)dt
1113946t
0e3(t) minus q3(t)x3(t)1113858 1113859e
1113938t
0f3(t)dtdt + φ3(0)1113896 1113897
(4)
And the designed controller in this paper is as follows
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
(5)
Journal of Mathematics 3
at is
u1(t) eminus 1113938
t
0f1(t)dt
1113946t
0e1(t) + q1(t)x1(t)1113858 1113859e
1113938t
0f1(t)dtdt + φ1(0)1113896 1113897
u2(t) eminus 1113938
t
0f2(t)dt
1113946t
0e2(t) minus q2(t)x3(t)1113858 1113859e
1113938t
0f2(t)dtdt + φ2(0)1113896 1113897
u3(t) eminus 1113938
t
0f3(t)dt
1113946t
0e3(t) minus q3(t)x4(t)1113858 1113859e
1113938t
0f3(t)dtdt + φ3(0)1113896 1113897
(6)
However the state equations are different e modelin [29] contains two preys and one predator while themodel in this paper contains one prey and two predatorsIn particular the new model contains prey diffusion anddelays
Due to biological interpretation of system (2) it isreasonable to consider only the positive solution of (2) inother words to take admissible initial conditions
xi(t) ϕi(t)ge 0 t isin [minus τ 0)
ϕi(0)gt 0 i 1 2 3 4
uj(0) φj(0)gt 0 j 1 2 3
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(7)
where τ max τ1 τ2 τ3 τ41113864 1113865Obviously the solutions of system (2) with initial data
(7) are positive for all tge 0is paper is organized as follows in Section 2 we give
the conditions for the permanence to system (2) by means ofthe theory of delay differential inequalities In Section 3 byconstructing an appropriate Lyapunov function we derivesufficient conditions for the global attractivity of positivesolution for system (2) In Section 4 by using some newanalysis method and the Brouwer fixed-point theory weobtain some conditions for the existence uniqueness andstability of a positive periodic solution for the correspondingperiodic system Some numerical solutions of the equationsdescribing the system are shown in Section 5 to verify thevalidity of the obtained criteria
2 Permanence
Firstly we introduce the following notations and definitionsFor a function g(t) defined on [t0+infin) we set
gm sup g(t) | t0 lt tltinfin1113864 1113865
gl inf g(t) | t0 lt tltinfin1113864 1113865
(8)
Definition 1 System (2) is called permanent if there existpositive constantsMi Nj mi nj (i 1 2 3 4 j 1 2 3) andT such that mi lexi(t)leMi and nj le uj(t)leNj for any
positive solution Z(t) (x1(t)) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t) of system (29) as tgtT
As a direct corollary of Lemma 21 of Chen [31] we havethe following
Lemma 1 If agt 0 bgt 0 and _xge b minus ax when tge 0 andx(0)gt 0 we have lim inf t⟶+infinx(t)ge ba If agt 0 bgt 0 and_xle b minus ax when tge 0 and x(0)gt 0 we havelim supt⟶+infinx(t)le ba
As a direct corollary of Lemma 22 of Chen [31] we havethe following
Lemma 2 If agt 0 bgt 0 and _xge b minus ax when tge 0 andx(0)gt 0 we have lim inf t⟶+infinx(t)ge ba If agt 0 bgt 0 and_xlex(b minus ax) when tge 0 and x(0)gt 0 we havelim supt⟶+infinx(t)le ba
Lemma 3 (see [32]) Assume that for y(t)gt 0 it holds that_y(t)ley(t)(λ minus 1113936
mk0 μ
ky(t minus kτ)) +D with initial condi-tions y(t) ϕ(t)ge 0 for t isin [minus mτ 0) and ϕ(0)gt 0 whereλgt 0 μk ge 0(k 0 1 m) μ 1113936
mk0 μk gt 0 and Dge 0 are
constants -en there exists a positive constant My lt +infinsuch that
lim supt⟶+infin
y(t)leMy minusD
λ+
D
λ+ ylowast
1113874 1113875exp(λmτ)lt +infin
(9)
where y ylowast is the unique solution of equationy(λ minus μy) +D 0
Lemma 4 (see [32]) Assume that for y(t)gt 0 it holds that_y(t)gey(t)[λ minus 1113936
mk0 μ
ky(t minus kτ)] If (9) holds then thereexists a positive constant my gt 0 such that for μ 1113936
mk0 μ
k gt 0we have
lim inft⟶+infin
y(t)gemy λμexp λ minus μMy1113872 1113873mτ1113966 1113967gt 0 (10)
For system (2) we let
4 Journal of Mathematics
M1 M2 maxrm1
al11
rm2
al22
1113896 1113897
N1 em1 + qm
1 M1
fl1
N2 em2
fl2
N3 em3
fl3
M3 am31M1( 1113857 bl
13 +M1( 1113857 + dm2 N2 minus rl
3
al33
times exp
middotam31M1
bl13 +M1
+ dm2 N2 minus r
l31113888 1113889τ11113890 1113891
M4 am41M1( 1113857 bl
14 +M1( 1113857 + dm3 N3 minus rl
4
al44
times exp
middotam41M1
bl14 +M1
+ dm3 N3 minus r
l41113888 1113889τ31113890 1113891
m1 rl1 minus am
13M3bl13 minus am
14M4bl14 minus dm
1 N1 minus Dm1
am11
m2 rl2 minus Dm
2am22
n1 el1 + ql
1m1
fm1
n2 el2 minus qm
2 M3
fm2
n3 el3 minus qm
3 M4
fm3
m3 al31m1( 1113857 bm
13 +m1( 1113857 + dl2n2 minus rm
3am33
times exp
middotal31m1
bm13 +m1
+ dl2n2 minus r
m3 minus a
m33M31113888 1113889τ11113890 1113891
m4 al41m1( 1113857 bm
14 +m1( 1113857 + dl3n3 minus rm
4am44
times exp
middotal41m1
bm14 +m1
+ dl3n3 minus r
m4 minus a
m44M41113888 1113889τ31113890 1113891
(11)
Next we state and prove our main result with respect tothe permanent for system (2)
Theorem 1 Suppose that system (2) satisfies the initialconditions (7) and following assumptions
(H1) rl3 lt (am
31M1)(bl13 +M1) + dm
2 N2
(H2) rl4 lt (am
41M1)(bl14 +M1) + dm
3 N3
(H3) rl1 gt am
13M3bl13 + am
14M4bl14 + dm
1 N1 +Dm1
(H4) rl2 gtDm
2
(H5) el2 gt qm
2 M3
(H6) el3 gt qm
3 M4
(H7) rm3 lt (al
31m1)(bm13 +m1) + dl
2n2
(H8) rm4 lt (al
41m1)(bm14 +m1) + dl
3n3
-en system (2) is permanent
Proof According to the first and the second equations ofsystem (2) we define W1(t) max x1(t) x2(t)1113864 1113865 and cal-culate the upper right derivative of W1(t) along the positivesolution of system (2) and we have that
(P1) if x1(t)gex2(t) then
D+W1(t) _x1(t) x1(t) r1(t) minus a11(t)x1(t)1113858
minusa13(t)x3(t)
b13(t) + x1(t)minus
a14(t)x4(t)
b14(t) + x1(t)
minus d1(t)u1(t)1113859 +D1(t) x2(t) minus x1(t)( 1113857
lex1(t) r1(t) minus a11(t)x1(t)1113858 1113859
lex1(t) rm1 minus a
l11x1(t)1113960 1113961
W1(t) rm1 minus a
l11W1(t)1113960 1113961
(12)
(P2) if x1(t)lex2(t) then
D+W1(t) _x2(t) x2(t) r2(t) minus a22(t)x2(t)1113858 1113859
+D2(t) x1(t) minus x2(t)( 1113857
le x2(t) r2(t) minus a22(t)x2(t)1113858 1113859
le x2(t) rm2 minus a
l22x2(t)1113960 1113961
W1(t) rm2 minus a
l22W1(t)1113960 1113961
(13)
It follows from (P1) and (P2) that
D+W1(t)leW1(t) r
mi minus a
liiW1(t)1113960 1113961 i 1 2 (14)
By (14) we can also deduce the following
(A) If W1(0) max x1(0) x2(0)1113864 1113865leM1 then we havemax x1(t) x2(t)1113864 1113865leM1 tge 0
(B) If W1(0) max x1(0) x2(0)1113864 1113865gtM1 take appro-priate αgt 0 we have the following three possibilities
(a) W1(0) x1(0)gtM1 (x1(0)gt x2(0))(b) W1(0) x2(0)gtM1 (x1(0)lt x2(0))(c) W1(0) x1(0) x2(0)gtM1
If (a) holds then there exists εgt 0 t isin [0 ε) such thatW1(t) x1(t)gtM1 en we get
Journal of Mathematics 5
D+W1(t) _x1(t)le a
l11W1(t)
rm1
al11minus W1(t)1113890 1113891le minus αlt 0
(15)
Similarly if (b) holds there exists εgt 0 t isin [0 ε) andW1(t) x2(t)gtM1 to derive
D+W1(t) _x2(t)le a
l22W1(t)
rm2
al22minus W1(t)1113890 1113891le minus αlt 0
(16)
Moreover in case (c) we also have
D+W1(t) _xi(t)le a
liiW1(t)
rmi
alii
minus W1(t)1113890 1113891le minus αlt 0 i 1 or 2
(17)
From what we have discussed above it yields that ifW1(0)gtM1 then W1(t) is strictly monotone decreasingwith speed at least α so there exists T1 gt 0 such that for anytime tgeT1 W1(t) max x1(t) x2(t)1113864 1113865leM1 which admits
lim supt⟶+infin
x1(t)leM1 M2 maxrm1
al11
rm2
al22
1113896 1113897 (18)
lim supt⟶+infin
x2(t)leM1 M2 maxrm1
al11
rm2
al22
1113896 1113897 (19)
According to the fifth equation of system (2) we have
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)le em1 minus f
l1u1(t) + q
m1 M1
(20)
Using Lemma 1 we can deduce
lim supt⟶+infin
u1(t)leem1 + qm
1 M1
fl1
N1 (21)
Similarly in light of the last two equations of system (26)we then have
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
le e2(t) minus f2(t)u2(t)le em2 minus f
l2u2(t)
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
le e3(t) minus f3(t)u3(t)le em3 minus f
l3u3(t)
(22)
By utilizing Lemma 1 again we can get
lim supt⟶+infin
u2(t)leem2
fl2 N2 (23)
lim supt⟶+infin
u3(t)leem3
fl3 N3 (24)
From the third and fourth equations of system (2) wehave
_x3(t) x3(t)1113890 minus r3(t) minus a33(t)x3 t minus τ1( 1113857
+a31(t)x1 t minus τ2( 1113857
b13(t) + x1 t minus τ2( 1113857+ d2(t)u2(t)1113891
lex3(t) minus rl3 minus a
l33x3 t minus τ1( 1113857 +
am31M1
bl13 +M1
+ dm2 N21113890 1113891
_x4(t) x4(t)1113890 minus r4(t) minus a44(t)x4 t minus τ3( 1113857
+a41(t)x1 t minus τ4( 1113857
b14(t) + x1 t minus τ4( 1113857+ d3(t)u3(t)1113891
lex4(t) minus rl4 minus a
l44x4 t minus τ3( 1113857 +
am41M1
bl14 +M1
+ dm3 N31113890 1113891
(25)
By Lemma 3 combining with (H1) and (H2) we have
lim supt⟶+infin
x3(t)leam31M1 bl
13 +M1( 1113857 + dm2 N2 minus rl
3
al33
times expam31M1
bl13 +M1
dm2 N2 minus r
l31113888 1113889τ11113890 1113891
M3
(26)
lim supt⟶+infin
x4(t)leam41M1 bl
14 +M1( 1113857 + dm3 N3 minus rl
4
al44
times expam41M1
bl14 +M1
+ dm3 N3 minus r
l41113888 1113889τ31113890 1113891
M4
(27)
On the contrary from the first equation of system (2) itfollows that
_x1(t) x1(t) r1(t) minus a11(t)x1(t)1113858
minusa13(t)x3(t)
b13(t) + x1(t)minus
a14(t)x4(t)
b14(t) + x1(t)
minus d1(t)u1(t)1113859 +D1(t) x2(t) minus x1(t)( 1113857
gex1(t) r1(t) minus a11(t)x1(t) minusa13(t)x3(t)
b13(t)1113890
minusa14(t)x4(t)
b14(t)minus d1(t)u1(t) minus D1(t)1113891
gex1(t) rl1 minus a
m11x1(t) minus
am13M3
bl13
minusam14M4
bl14
minus dm1 N1 minus D
m11113890 1113891
(28)
By Lemma 2 and assumption (H3) we have
6 Journal of Mathematics
lim inft⟶+infin
x1(t)gerl1
am11minus
am13M3
bl13a
m11minus
am14M4
bl14a
m11
minusdm1 N1
am11
minusDm
1am11
m1
(29)
For the second equation of system (2) it holds that
_x2(t) x2(t) r2(t) minus a22(t)x2(t)1113858 1113859
+D2(t) x1(t) minus x2(t)( 1113857
gex2(t) r2(t) minus a22(t)x2(t) minus D2(t)1113858 1113859
gex2(t) rl2 minus a
m22x2(t) minus D
m21113960 1113961
(30)
From assumption (H4) and by Lemma 2 we can get
lim inft⟶+infin
x2(t)gerl2 minus Dm
2am22
m2 (31)
For the fifth equation of system (2) we have
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)
ge el1 minus f
m1 u1(t) + q
l1m1
(32)
By Lemma 1 it holds that
lim inft⟶+infin
u1(t)geel1 + ql
1m1
fm1
n1 (33)
For the sixth and the seventh equations of system (2) wecan obtain
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
ge el2 minus f
m2 u2(t) minus q
m2 M3
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
ge el3 minus f
m3 u3(t) minus q
m3 M4
(34)
By Lemma 1 (H5) and (H6) we have
lim inft⟶+infin
u2(t)geel2 minus qm
2 M3
fm2
n2 (35)
lim inft⟶+infin
u3(t)geel3 minus qm
3 M4
fm3
n3 (36)
According to the third and the fourth equations ofsystem (2) we have
_x3(t) x3(t)1113890 minus r3(t) minus a33(t)x3 t minus τ1( 1113857
+a31(t)x1 t minus τ2( 1113857
b13(t) + x1 t minus τ2( 1113857+ d2(t)u2(t)
ge x3(t) minus rm3 minus a
m33x3 t minus τ1( 1113857 +
al31m1
bm13 +m1
+ dl2n21113890 1113891
_x4(t) x4(t)1113890 minus r4(t) minus a44(t)x4 t minus τ3( 1113857
+a41(t)x1 t minus τ4( 1113857
b14(t) + x1 t minus τ4( 1113857+ d3(t)u3(t)1113891
ge x4(t)1113890 minus rm4 minus a
m44x4 t minus τ3( 1113857
+al41m1
bm14 +m1
+ dl3n31113891
(37)
Using Lemma 4 (H7) and (H8) we also derive that
lim inft⟶+infin
x3(t)geal31m1( 1113857 bm
13 +m1( 1113857 + dl2n2 minus rm
3am33
times expal31m1
bm13 +m1
+ dl2n2 minus r
m3 minus a
m33M31113888 1113889τ11113890 1113891
m3
(38)
lim inft⟶+infin
x4(t)geal41m1( 1113857 bm
14 +m1( 1113857 + dl3n3 minus rm
4am44
times expal41m1
bm14 +m1
+ dl3n3 minus r
m4 minus a
m44M41113888 11138891113890 1113891τ3
m4
(39)
Summarizing (18)ndash(39) we complete the induction ofeorem 1
Remark 2 It is obvious that the proof method for Lemma21 in [29] is the differential inequality theory while that ofthis article is the delay differential inequality theory Fromthe result of eorem 1 the feedback control items anddelays have influence on the permanence of system (2) Inother words the densities of the prey and predator pop-ulations are uniformly bounded when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H8)
3 Global Attractivity
In this section the global attractivity of system (2) will bestudied To get the sufficient conditions for global attractivity ofsystem (2) we firstly give the following definition and Lemma
Journal of Mathematics 7
Definition 2 System (2) is said to be globally attractive ifthere exists a positive solution
X(t) x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)( 1113857
(40)
of system (2) such that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0
limt⟶+infin
ui(t) minus vi(t)1113868111386811138681113868
1113868111386811138681113868 0
i 1 2 3 4 j 1 2 3
(41)
for any other positive solutionY(t) (y1(t) y2(t) y3(t) y4(t) v1(t) v2(t) v3(t)) of sys-tem (2)
Lemma 5 (see [33]) If the function f(t) R+⟶ R isuniformly continuous and the limit limt⟶+infin 1113938
t
0 f(s)ds existsand is finite then limt⟶+infinf(t) 0
Next we state and prove our main result with respect tothe global attractivity for system (2)
Theorem 2 Assume that system (2) satisfies (H1)minus (H8) andthe following conditions
(H9) Ai gt 0 Bj gt 0 (i 1 2 3 4 j 1 2 3) where
B1 fl1 minus d
m1
B2 fl2 minus d
m2 minus M3d
m2 a
m33τ1
B3 fl3 minus d
m3 minus M4d
m3 a
m44τ3
A1 al11 minus
am13M3
bl13 +m1( 1113857
2 minusam14M4
bl14 +m1( 1113857
2 minusDm
2m2
minusam31b
m13
bl13 +m1( 1113857
2
minusM3a
m31a
m33τ1
bl13 +m1
minusam41b
m14
bl14 +m1( 1113857
2 minusM4a
m41a
m44τ3
bl14 +m1
minus qm1
A2 al22 minus Dm
1m1
A3 al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
+ dm2 N21113888 1113889a
m33τ1
minus M3 am33( 1113857
2τ1 minusam13b
m13 + am
13M1
bl13 +m1( 1113857
2 minus qm2
A4 al44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113888 1113889a
m44τ3
minus M4 am44( 1113857
2τ3 minusam14b
m14 + am
14M1
bl14 +m1( 1113857
2 minus qm3
(42)
-en system (2) is globally attractive
Proof Suppose that (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t)
u3(t)) and (y1(t) y2(t) y3(t) y4(t) v1(t) v2(t) v3(t)) areany two different positive solutions of system (2)en from
eorem 1 there exist positive constants Mi mi Njnj(i 1 2 3 4 j 1 2 3) and T such that
mi lexi(t) yi(t)leMi i 1 2 3 4
nj le uj(t) vj(t)leNj j 1 2 3(43)
We defineV1(t) lnx1(t) minus lny1(t)
11138681113868111386811138681113868111386811138681113868
V2(t) lnx2(t) minus lny2(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎨
⎩ (44)
Calculating the upper-right derivative of V1(t) andV2(t) along the solution of system (2) we have
1113944
2
i1D+Vi(T) 1113944
2
i1D+ lnxi(t) minus lnyi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961
le sgn x1(t) minus y1(t)1113864 11138651113890 minus a11(t) x1(t) minus y1(t)( 1113857
minusa13(t)b13(t) + a13(t)y1(t)( 1113857 x3(t) minus y3(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa13(t)y3(t) x1(t) minus y1(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa13(t)y3(t) x1(t) minus y1(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa14(t)b14(t) + a14(t)y1(t)( 1113857 x4(t) minus y4(t)( 1113857
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857
minusa14(t)y4(t) x1(t) minus y1(t)( 1113857
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857
minus d1(t) u1(t) minus v1(t)( 1113857 +D1(t)x2(t)
x1(t)minus
y2(t)
y1(t)1113888 11138891113891
+ sgn x2(t) minus y2(t)1113864 1113865 minus a22(t) x2(t) minus y2(t)( 11138571113858
+D2(t)x1(t)
x2(t)minus
y1(t)
y2(t)1113888 11138891113891
le minus a11(t) minusa13(t)y3(t)
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 11138571113888
minusa14(t)y4(t)
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 11138571113889
times x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868 minus a22(t) x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868
+a13(t)b13(t) + a13(t)y1(t)
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+a14(t)b14(t) + a14(t)y1(t)
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+ d1(t) u1(t) minus v1(t)1113868111386811138681113868
1113868111386811138681113868 + 1113957D1(t) + 1113957D2(t)
(45)where
8 Journal of Mathematics
1113957D1(t)
D1(t)x2(t)
x1(t)minus
y2(t)
y1(t)1113888 1113889 x1(t)gty1(t)
D1(t)y2(t)
y1(t)minus
x2(t)
x1(t)1113888 1113889 x1(t)lty1(t)
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
1113957D2(t)
D2(t)x1(t)
x2(t)minus
y1(t)
y2(t)1113888 1113889 x2(t)gty2(t)
D2(t)y1(t)
y2(t)minus
x1(t)
x2(t)1113888 1113889 x2(t)lty2(t)
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
(46)
Next we discuss 1113957D1(t) under the following three cases
(a) If x1(t)gty1(t) then
1113957D1(t)leD1(t)
x1(t)x2(t) minus y2(t)( 1113857
leDm
1m1
x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868
(47)
(b) If x1(t)lty1(t) then
1113957D1(t)leD1(t)
y1(t)y2(t) minus x2(t)( 1113857le
Dm1
m1x2(t) minus y2(t)
11138681113868111386811138681113868111386811138681113868
(48)
(c) If x1(t) y1(t) the same conclusion as (a) and (b)holds
Combining the conclusions in (a)ndash(c) we have
1113957D1(t)leDm
1m1
x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868 (49)
A similar argument shows that
1113957D2(t)leDm
2 (t)
mlsquo2x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868 (50)
By means of (45)ndash(50) we have
1113944
2
i1D+Vi(t)le minus a
l11 minus
am13M3
bl13 +m1( 1113857
2 minusam14M4
bl14 +m1( 1113857
2 minusDm
2m2
⎛⎝ ⎞⎠
times x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868 minus al22 minus
Dm1
m11113888 1113889 x2(t) minus y2(t)
11138681113868111386811138681113868111386811138681113868
+am13b
m13 + am
13M1
bl13 +m1( 1113857
2 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am14b
m14 + am
14M1
bl14 +m1( 1113857
2 x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868
+ dm1 u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868
(51)
Define
V31(t) lnx3(t) minus lny3(t)1113868111386811138681113868
1113868111386811138681113868 (52)
Calculating the upper right derivative of V31(t) along thesolution of system (2) it follows thatD+V31(t) sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3 t minus τ1( 1113857(1113858
minus y3 t minus τ1( 11138571113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ d2(t) u2(t) minus v2(t)( 11138571113859
sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3(t) minus y3(t)( 11138571113858
+ d2(t) u2(t) minus v2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+a33(t)1113946t
tminus τ1_x3(θ) minus _y3(θ)( 1113857dθ1113891
sgn x3(t) minus y3(t)1113864 1113865minus a33(t) x3(t) minus y3(t)( 11138571113859
+ d2(t) u2(t) minus v2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ a33(t)1113946t
tminus τ1x3(θ)1113890 minus r3(θ) minus a33(θ)x3 θ minus τ1( 11138571113888
+a31(θ)x1 θ minus τ2( 1113857
b13(θ) + x1 θ minus τ2( 1113857+ d2(θ)u2(θ)1113891
minus y3(θ)1113890 minus r3(θ) minus a33(θ)y3 θ minus τ1( 1113857
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)11138911113889dθ1113891
sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3(t) minus y3(t)( 11138571113858
+ d2(t) u2(t) minus y2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ a33(t)1113946t
tminus τ1x3(θ) minus y3(θ)( 1113857(
times 1113890 minus r3(θ) minus a33(θ)y3 θ minus τ1( 1113857
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
Journal of Mathematics 9
+ x3(θ)1113890 minus a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 1113857( 1113857
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857( 1113857
+ d2(θ) u2(θ) minus v2(θ)( 111385711138591113857dθ⎤⎦
le minus a33(t) x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 + d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ a33(t)1113946t
tminus τ11113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891 x3(θ) minus y3(θ)
11138681113868111386811138681113868111386811138681113868
+ x3(θ) a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+ d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(53)
Define
V32(t) 1113946t
tminus τ11113946
t
sa33 s + τ1( 1113857 1113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
times x3(θ) minus y3(θ)1113868111386811138681113868
1113868111386811138681113868
+ x3(θ)1113890a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
1113868111386811138681113868⎤⎦⎞⎠dθ ds
(54)
From (53) and (54) we have
1113944
2
i1D+V3i(t)le minus a33(t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+ d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ1a33 s + τ1( 1113857ds1113890r3(t) + a33(t)y3 t minus τ1( 1113857
+a31(t)y1 t minus τ2( 1113857
b13(t) + y1 t minus τ2( 1113857+ d2(t)v2(t)1113891
times x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 +M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
times a33(t) x3 t minus τ1( 1113857 minus y3 t minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
timesa31(t)
b13(t) + x1 t minus τ2( 1113857x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds times d2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(55)
We also define
V33(t) 1113946t
tminus τ2
a31 w + τ2( 1113857b13 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)( 1113857 b13 w + τ2( 1113857 + y1(w)( 1113857
timesx1(w) minus y1(w)|dw
+M3 1113946t
tminus τ11113946
w+τ1
wa33 s + τ1( 1113857a33 w + τ1( 1113857
times x3(w) minus y3(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M3 1113946t
tminus τ21113946
w+τ2
w+τ2minus τ1a33 s + τ1( 1113857
a31 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(56)
10 Journal of Mathematics
and let
V3(t) V31(t) + V32(t) + V33(t) (57)
According to (55) and (56) calculating the upper rightderivative of V3(t) we have
D+V3(t)le minus a
l33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+dm2 N21113889 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds
minus M3am33 1113946
t+τ1
ta
m33 s + τ1( 1113857ds1113891 x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3am31
bl13 +m1
⎡⎣
times1113946t+τ2
t+τ2minus τ1a
m33 s + τ1( 1113857ds1113891 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm2 +M3d
m2 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds1113890 1113891
times u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
le minus al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+ dm2 N21113857a
m33τ1 minus M3 a
m33( 1113857
2τ11113961 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3a
m31a
m33τ1
bl13 +m1
⎛⎝ ⎞⎠ x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868
+ dm2 +M3d
m2 a
m33τ1( 1113857 u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(58)
Similarly we define
V41(t) lnx4(t) minus lny4(t)1113868111386811138681113868
1113868111386811138681113868 (59)
Calculating the upper right derivative of V41(t) along thesolution of system (2) we get
D+V41(t) sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4 t minus τ3( 1113857(1113858
minus y4 t minus τ3( 11138571113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+d3(t) u3(t) minus v3(t)( 11138571113859
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+a44(t)1113946t
tminus τ3_x4(θ) minus _y4(θ)( 1113857dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus r4(θ) minus a44(θ)x4 θ minus τ3( 11138571113858(
+a41(θ)x1 θ minus τ4( 1113857
b14(θ) + x1 θ minus τ4( 1113857+ d3(θ)u3(θ)1113891
minus y4(θ) minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)11138911113889dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t) minus y4(t)( 11138571113858
+ d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus y4(θ)( 1113857
times minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)1113891
+ x4(θ) minus a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 1113857( 11138571113858
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857( 1113857
+d3(θ) u3(θ) minus v3(θ)( 111385711138591113857dθ1113859
le minus a44(t) x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 + d3(t) u3(t) minus v3(t)1113868111386811138681113868
1113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ a44(t)1113946t
tminus τ3r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+ d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(60)
Journal of Mathematics 11
We define
V42(t) 1113946t
tminus τ31113946
t
sa44 s + τ3( 1113857 r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ ds
(61)
By (60) and (61) we have
1113944
2
i1D+V4i(t)le minus a44(t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868 + d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ3a44 s + τ3( 1113857ds times 1113890r4(t) + a44(t)y4 t minus τ3( 1113857
+a41(t)y1 t minus τ4( 1113857
b14(t) + y1 t minus τ4( 1113857+ d3(t)v3(t)1113891
times x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 +M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
times a44(t) x4 t minus τ3( 1113857 minus y4 t minus τ3( 11138571113868111386811138681113868
1113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
timesa41(t)
b14(t) + x1 t minus τ4( 1113857x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds times d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(62)
Let
V4(t) V41(t) + V42(t) + V43(t) (63)
where
V43(t) 1113946t
tminus τ4
a41 w + τ4( 1113857b14 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)( 1113857 b14 w + τ4( 1113857 + y1(w)( 1113857
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868dw
+M4 1113946t
tminus τ31113946
w+τ3
wa44 s + τ3( 1113857a44 w + τ3( 1113857
times x4(w) minus y4(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M4 1113946t
tminus τ41113946
w+τ4
w+τ4minus τ3a44 s + τ3( 1113857
a41 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(64)
By (62) and (64) we have
D+V4(t)le minus a
l44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113890 11138911113888
times 1113946t
tminus τ3a
m44 s + τ3( 1113857ds
minus M4am44 1113946
t+τ3
ta
m44 s + τ3( 1113857ds1113889 x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+am41b
m14
bl14 +m1( 1113857
2 +M4am41
bl14 +m1
⎛⎝
times1113946t+τ4
t+τ4 minus τ3a
m44 s + τ3( 1113857ds1113889 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm3 +M4d
m3 1113946
t
tminus τ3a
m44 s + τ3( 1113857ds1113888 1113889 u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(65)
Moreover define V5(t) V6(t) andV7(t) by
V5(t) ln u1(t) minus ln v1(t)1113868111386811138681113868
1113868111386811138681113868
V6(t) ln u2(t) minus ln v2(t)1113868111386811138681113868
1113868111386811138681113868
V7(t) ln u3(t) minus ln v3(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
(66)
Calculating the upper right derivative of V5(t) V6(t)and V7(t) along the solutions of system (2) it holds that
D+V5(t)le sgn u1(t) minus v1(t)( 1113857 minus f1(t) u1(t)(1113858
minus v1(t)1113857 + q1(t) x1(t) minus y1(t)( 11138571113859
le minus fl1(t) u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868 + q
m1 (t) x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
(67)
D+V6(t)le sgn u2(t) minus v2(t)( 1113857 minus f2(t) u2(t)(1113858
minus v2(t)1113857 minus q2(t) x3(t) minus y3(t)( 11138571113859
le minus fl2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
+ qm2 (t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
(68)
12 Journal of Mathematics
D+V7(t)le sgn u3(t) minus v3(t)( 1113857 minus f3(t) u3(t)(1113858
minus v3(t)1113857 minus q3(t) x4(t) minus y4(t)( 11138571113859
le minus fl3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+ qm3 (t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
(69)
Finally we define a Lyapunov function as follows
V(t) 11139447
i1Vi(t) (70)
From (51) (58) (65) and (67)ndash(69) we can get that forall tgeT + τ
D+V(t)le minus 1113944
4
i1Ai xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 minus 1113944
3
j1Bj uj(t) minus vj(t)
11138681113868111386811138681113868
11138681113868111386811138681113868
(71)
In view of conditions (H9) of eorem 2 there exists aconstant αgt 0 and Tlowast gtT + τ such that for all tgeTlowast it holdsthat
Ai ge αgt 0
Bj ge αgt 0
i 1 2 3 4 j 1 2 3
(72)
Integrating fromTlowast to t on both sides of (71) and by (72)we have
V(t) + α1113946t
Tlowast1113944
4
i1xi(s) minus yi(s)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(s) minus vj(s)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠ds
leV Tlowast
( 1113857lt +infin
(73)
erefore V(t) is bounded on [Tlowast+infin) and we have
1113946infin
Tlowast1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠dsleV(T)
αlt +infin
(74)
By (74) we also have
1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113874 1113875 isin L1(T+infin)
(75)
Applying eorem 1 we can obtain that |xi(t) minus yi(t)||uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 and their derivativesremain bounded on [Tlowast+infin) and |xi(t) minus yi(t)| and|uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 are uniformly con-tinuous on [Tlowast+infin) By Lemma 5 we can conclude that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0 i 1 2 3 4
limt⟶+infin
uj(t) minus vj(t)11138681113868111386811138681113868
11138681113868111386811138681113868 0 j 1 2 3(76)
is completes the proof and the solution of system (2)is globally attractive
Remark 3 From the result ofeorem 2 the feedback controlitems and delays have influence on the globally attractive of
system (2) namely the population densities for the system willapproach to a positive equilibrium when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H9)
Remark 4 It should not be difficult to see that the methodand skills of constructing a suitable Lyapunov function in thepaper are very different with those of [29] and the method ofconstructing Lyapunov function in [29] cannot be used inthis manuscript
4 Periodic Solution
Assuming that coefficients of system (2) are positive con-tinuous and ω minus periodic functions then system (2) ischanged to the ω minus periodic system In this section we shallobtain conditions for the existence uniqueness and stabilityof a positive periodic for system (2) by using the fixed-pointtheory and some new analysis method For convenience wegive firstly the following lemma
Lemma 6 (see [34]) Let S sub Rn be convex and compact Ifmapping T S⟶ S is continuous then there exists a fixedpoint ie there exists xlowast isin S such that T(xlowast) xlowast
Next we state and prove our main result with respect tothe periodic solution for system (2)
Theorem 3 Assume that system (2) is a ω-periodic systemand satisfies conditions (H1) minus (H9) then system (2) has apositive unique ω-periodic solution which is globally as-ymptotically stable
Proof According to the existence and uniqueness theorem ofsolutions of functional differential equations [35ndash38] we candefine a Poincare mapping T R7
+⟶ R7+ as follows
T X0( 1113857 X tω X0( 1113857 (77)
where X(tω X0) (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)) be a positive solution of system (2) with initialconditions (7) And define
S x1 x2 x3 x4 u1 u2 u3( 1113857 isin R7+
mi lexi leMi i 1 2 3 4
nj le uj leNj j 1 2 3
111386811138681113868111386811138681113868111386811138681113868
⎧⎨
⎩
⎫⎬
⎭
(78)
en it is obvious that S sub R7+ is a convex and compact set
By eorem 1 and the continuity of solution of system (2)with respect to initial conditions (7) the mappingT S⟶ S is continuous Furthermore it is not difficult toshow that system (2) has a positive unique ω minus periodicsolution which is globally asymptotic stability by usingLemma 6 and eorem 2
Remark 5 From the result of eorem 3 the feedbackcontrol items and delays have influence on the periodic ofω minus periodic system (2) at is the population densities forthe periodic system will tend to a positive ω minus periodicequilibrium when system (2) satisfies ω minus periodic initialconditions (7) and assumptions (H1) minus (H9)
Journal of Mathematics 13
5 Numerical Simulation
In this section we give some numerical simulations to illustratethe feasibility of our main results In order to facilitate theverification of eorem 3 where the system is a periodicsystem we select the periodic function as the coefficient ofsystem (2) and consider the following multidelay periodicpredator-prey model with feedback control and prey diffusion
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)minus
(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
minus (0015 + 0005 sin πt)u1(t)1113859
+(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t) (25 + 05 sin πt) minus (225 + 025 cos πt)x21113858 1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)[minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857
+(05 + 01 sin πt)u2(t)1113859
_x4(t) x4(t)[minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857
+(045 + 005 sin πt)u3(t)1113859
_u1(t) (15 + 05 cos πt) minus (16 + 04 sin πt)u1(t)
+(015 + 005 sin πt)x1(t)
_u2(t) (2 + 05 cos πt) minus (105 + 005 sin πt)u2(t)
minus (15 + 05 sin πt)x3(t)
_u3(t) (355 + 005 cos πt) minus (345 + 045 sin πt)u3(t)
minus (225 + 025 sin πt)x4(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(79)
where time delay τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 1 t isin [minus 004 0]
x2(0) 1
x3(t) sin t + 1 t isin [minus 001 0]
x4(t) sin t + 1 t isin [minus 003 0]
ui(0) 1 (i 1 2 3)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(80)
From the conditions of eorem 3 we select somespecific parameter values shown in models (79) and (80)according to the calculation Of course the choiceof parameters in the model is not unique It is not difficultto verify that system (79) satisfies the conditions of eorems1ndash3 It holds from eorems 1 and 2 that system (79) ispermanent and globally attractive By means of eorem 3system (79) has a positive unique periodic solution which isglobally asymptotic stability By using the software packageMATLAB 71 we can solve the numerical solutions of systems(79) and (80) as shown in Figures 1ndash3 Figure 1 shows that thepermanence of system (79) with initial conditions (80) andtime delay τ1 001 τ2 002 τ3 003 and τ4 004 Itis not difficult to see from Figure 2 that system (79) isglobally attractive Figure 3 shows the dynamic behavior ofsystem (79)
In general ecosystems represented by deterministicLotkandashVolterra models are not suitable for describing thereal behavior of population dynamics e feedbackcontrol variable we described above is strictly related tothe environmental noise effect It is well known that theenvironmental noise is a very important factor in mod-eling natural phenomena in ecological systems At pres-ent it is impossible to model population dynamicswithout considering the interaction between the ecolog-ical system and environmental noise always present innature In fact the environmental noise acts construc-tively producing counterintuitive effects and interestingnoise-induced phenomena such as stochastic resonancenoise-enhanced stability and resonant activation (cf[39ndash43]) In addition the study of nonlinear dynamicalsystems with external noise has found some counterin-tuitive phenomena that play a constructive role in noiseand are highly fundamental and practical interests inmany scientific fields (cf [44ndash47]) e presence of noisesources can alter the stability of the ecosystem (cf[48ndash51]) In addition this noise in general breaks thesymmetry of the ecosystem see for example [52] andmoreover it gives rise to extinction phenomena becausethe multiplicative noise has the effect of an absorbingbarrier see for example [53]
As a response to this we consider the following cor-responding stochastic predator-prey model with the mul-tiplicative noise sources
14 Journal of Mathematics
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)
minus(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
+Dξ1(t)1113859 +(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t)[(25 + 05 sin πt)
minus (225 + 025 cos πt)x2(t)1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)1113890 minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857+Dξ2(t)1113891
_x4(t) x4(t)1113890 minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857+Dξ3(t)1113891
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(81)
where ξi(t) are δ-correlated Gaussian white noise sourceswith zero mean that is langδi(t)rang 0 andlangδi(t)δi(tprime)rang Diδ(t minus tprime)δij with Di the noise intensities(here we choose all equal noise intensities that is Di D)and time delays τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 05 t isin [minus 004 0]
x2(0) 05
x3(t) sin t + 05 t isin [minus 001 0]
x4(t) sin t + 05 t isin [minus 003 0]
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(82)
x1(t)x2(t)
x3(t)x4(t)
04
05
06
07
08
09
1
11
12
13
5 10 15 20 25 30 35 40 45 500t
(a)
u1(t)u2(t)u3(t)
07
08
09
1
11
12
13
14
15
16
5 10 15 20 25 30 35 40 45 500t
(b)
Figure 1 e numerical solution of system (79) with initial condition (60) (80)
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
16
2 4 6 8 10 12 14 16 18 200t
Figure 2 Numerical solution of system (79) with different initialconditions
Journal of Mathematics 15
0
02
04
06
08
1
12
14
16x 3
(t)
02 04 06 08 1 12 14 160x2(t)
(a)
1
15
2
25
x 2(t)
05 1 15 2 250x1(t)
(b)
02
04
06
08
1
12
14
16
18
2
22
x 3(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(c)
0
02
04
06
08
1
12
14
16
x 4(t)
04 06 08 1 12 14 160 02x2(t)
(d)
02
04
06
08
1
12
14
16
18
2
x 4(t)
04 06 08 1 12 14 16 18 202x3(t)
(e)
02
04
06
08
1
12
14
16
18
2
22
x 4(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(f )
Figure 3 Continued
16 Journal of Mathematics
005
115
2
005
115
2
x2(t)x3 (t)
0
05
1
15
2
x 4(t)
(g)
051
152
25
115
225
x1(t)x2 (t)
0
05
1
15
2
25
x 3(t)
(h)
051
152
25
115
2250
05
1
15
2
25
x 4(t)
x1(t)x2 (t)
(i)
x1(t)x3 (t)
051
152
005
115
20
05
1
15
2
x 4(t)
(j)
Figure 3 Dynamic behavior of system (79)
D = 0005
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(a)
D = 001
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(b)
Figure 4 Continued
Journal of Mathematics 17
D = 002
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(c)
x1(t)x2(t)
x3(t)x4(t)
D = 004
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(d)
Figure 4 e numerical solutions of systems (81) and (82) with very low noise intensities
D = 01
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(a)
D = 02
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(b)
Figure 5 Continued
18 Journal of Mathematics
D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

at is
u1(t) eminus 1113938
t
0f1(t)dt
1113946t
0e1(t) + q1(t)x1(t)1113858 1113859e
1113938t
0f1(t)dtdt + φ1(0)1113896 1113897
u2(t) eminus 1113938
t
0f2(t)dt
1113946t
0e2(t) minus q2(t)x3(t)1113858 1113859e
1113938t
0f2(t)dtdt + φ2(0)1113896 1113897
u3(t) eminus 1113938
t
0f3(t)dt
1113946t
0e3(t) minus q3(t)x4(t)1113858 1113859e
1113938t
0f3(t)dtdt + φ3(0)1113896 1113897
(6)
However the state equations are different e modelin [29] contains two preys and one predator while themodel in this paper contains one prey and two predatorsIn particular the new model contains prey diffusion anddelays
Due to biological interpretation of system (2) it isreasonable to consider only the positive solution of (2) inother words to take admissible initial conditions
xi(t) ϕi(t)ge 0 t isin [minus τ 0)
ϕi(0)gt 0 i 1 2 3 4
uj(0) φj(0)gt 0 j 1 2 3
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(7)
where τ max τ1 τ2 τ3 τ41113864 1113865Obviously the solutions of system (2) with initial data
(7) are positive for all tge 0is paper is organized as follows in Section 2 we give
the conditions for the permanence to system (2) by means ofthe theory of delay differential inequalities In Section 3 byconstructing an appropriate Lyapunov function we derivesufficient conditions for the global attractivity of positivesolution for system (2) In Section 4 by using some newanalysis method and the Brouwer fixed-point theory weobtain some conditions for the existence uniqueness andstability of a positive periodic solution for the correspondingperiodic system Some numerical solutions of the equationsdescribing the system are shown in Section 5 to verify thevalidity of the obtained criteria
2 Permanence
Firstly we introduce the following notations and definitionsFor a function g(t) defined on [t0+infin) we set
gm sup g(t) | t0 lt tltinfin1113864 1113865
gl inf g(t) | t0 lt tltinfin1113864 1113865
(8)
Definition 1 System (2) is called permanent if there existpositive constantsMi Nj mi nj (i 1 2 3 4 j 1 2 3) andT such that mi lexi(t)leMi and nj le uj(t)leNj for any
positive solution Z(t) (x1(t)) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t) of system (29) as tgtT
As a direct corollary of Lemma 21 of Chen [31] we havethe following
Lemma 1 If agt 0 bgt 0 and _xge b minus ax when tge 0 andx(0)gt 0 we have lim inf t⟶+infinx(t)ge ba If agt 0 bgt 0 and_xle b minus ax when tge 0 and x(0)gt 0 we havelim supt⟶+infinx(t)le ba
As a direct corollary of Lemma 22 of Chen [31] we havethe following
Lemma 2 If agt 0 bgt 0 and _xge b minus ax when tge 0 andx(0)gt 0 we have lim inf t⟶+infinx(t)ge ba If agt 0 bgt 0 and_xlex(b minus ax) when tge 0 and x(0)gt 0 we havelim supt⟶+infinx(t)le ba
Lemma 3 (see [32]) Assume that for y(t)gt 0 it holds that_y(t)ley(t)(λ minus 1113936
mk0 μ
ky(t minus kτ)) +D with initial condi-tions y(t) ϕ(t)ge 0 for t isin [minus mτ 0) and ϕ(0)gt 0 whereλgt 0 μk ge 0(k 0 1 m) μ 1113936
mk0 μk gt 0 and Dge 0 are
constants -en there exists a positive constant My lt +infinsuch that
lim supt⟶+infin
y(t)leMy minusD
λ+
D
λ+ ylowast
1113874 1113875exp(λmτ)lt +infin
(9)
where y ylowast is the unique solution of equationy(λ minus μy) +D 0
Lemma 4 (see [32]) Assume that for y(t)gt 0 it holds that_y(t)gey(t)[λ minus 1113936
mk0 μ
ky(t minus kτ)] If (9) holds then thereexists a positive constant my gt 0 such that for μ 1113936
mk0 μ
k gt 0we have
lim inft⟶+infin
y(t)gemy λμexp λ minus μMy1113872 1113873mτ1113966 1113967gt 0 (10)
For system (2) we let
4 Journal of Mathematics
M1 M2 maxrm1
al11
rm2
al22
1113896 1113897
N1 em1 + qm
1 M1
fl1
N2 em2
fl2
N3 em3
fl3
M3 am31M1( 1113857 bl
13 +M1( 1113857 + dm2 N2 minus rl
3
al33
times exp
middotam31M1
bl13 +M1
+ dm2 N2 minus r
l31113888 1113889τ11113890 1113891
M4 am41M1( 1113857 bl
14 +M1( 1113857 + dm3 N3 minus rl
4
al44
times exp
middotam41M1
bl14 +M1
+ dm3 N3 minus r
l41113888 1113889τ31113890 1113891
m1 rl1 minus am
13M3bl13 minus am
14M4bl14 minus dm
1 N1 minus Dm1
am11
m2 rl2 minus Dm
2am22
n1 el1 + ql
1m1
fm1
n2 el2 minus qm
2 M3
fm2
n3 el3 minus qm
3 M4
fm3
m3 al31m1( 1113857 bm
13 +m1( 1113857 + dl2n2 minus rm
3am33
times exp
middotal31m1
bm13 +m1
+ dl2n2 minus r
m3 minus a
m33M31113888 1113889τ11113890 1113891
m4 al41m1( 1113857 bm
14 +m1( 1113857 + dl3n3 minus rm
4am44
times exp
middotal41m1
bm14 +m1
+ dl3n3 minus r
m4 minus a
m44M41113888 1113889τ31113890 1113891
(11)
Next we state and prove our main result with respect tothe permanent for system (2)
Theorem 1 Suppose that system (2) satisfies the initialconditions (7) and following assumptions
(H1) rl3 lt (am
31M1)(bl13 +M1) + dm
2 N2
(H2) rl4 lt (am
41M1)(bl14 +M1) + dm
3 N3
(H3) rl1 gt am
13M3bl13 + am
14M4bl14 + dm
1 N1 +Dm1
(H4) rl2 gtDm
2
(H5) el2 gt qm
2 M3
(H6) el3 gt qm
3 M4
(H7) rm3 lt (al
31m1)(bm13 +m1) + dl
2n2
(H8) rm4 lt (al
41m1)(bm14 +m1) + dl
3n3
-en system (2) is permanent
Proof According to the first and the second equations ofsystem (2) we define W1(t) max x1(t) x2(t)1113864 1113865 and cal-culate the upper right derivative of W1(t) along the positivesolution of system (2) and we have that
(P1) if x1(t)gex2(t) then
D+W1(t) _x1(t) x1(t) r1(t) minus a11(t)x1(t)1113858
minusa13(t)x3(t)
b13(t) + x1(t)minus
a14(t)x4(t)
b14(t) + x1(t)
minus d1(t)u1(t)1113859 +D1(t) x2(t) minus x1(t)( 1113857
lex1(t) r1(t) minus a11(t)x1(t)1113858 1113859
lex1(t) rm1 minus a
l11x1(t)1113960 1113961
W1(t) rm1 minus a
l11W1(t)1113960 1113961
(12)
(P2) if x1(t)lex2(t) then
D+W1(t) _x2(t) x2(t) r2(t) minus a22(t)x2(t)1113858 1113859
+D2(t) x1(t) minus x2(t)( 1113857
le x2(t) r2(t) minus a22(t)x2(t)1113858 1113859
le x2(t) rm2 minus a
l22x2(t)1113960 1113961
W1(t) rm2 minus a
l22W1(t)1113960 1113961
(13)
It follows from (P1) and (P2) that
D+W1(t)leW1(t) r
mi minus a
liiW1(t)1113960 1113961 i 1 2 (14)
By (14) we can also deduce the following
(A) If W1(0) max x1(0) x2(0)1113864 1113865leM1 then we havemax x1(t) x2(t)1113864 1113865leM1 tge 0
(B) If W1(0) max x1(0) x2(0)1113864 1113865gtM1 take appro-priate αgt 0 we have the following three possibilities
(a) W1(0) x1(0)gtM1 (x1(0)gt x2(0))(b) W1(0) x2(0)gtM1 (x1(0)lt x2(0))(c) W1(0) x1(0) x2(0)gtM1
If (a) holds then there exists εgt 0 t isin [0 ε) such thatW1(t) x1(t)gtM1 en we get
Journal of Mathematics 5
D+W1(t) _x1(t)le a
l11W1(t)
rm1
al11minus W1(t)1113890 1113891le minus αlt 0
(15)
Similarly if (b) holds there exists εgt 0 t isin [0 ε) andW1(t) x2(t)gtM1 to derive
D+W1(t) _x2(t)le a
l22W1(t)
rm2
al22minus W1(t)1113890 1113891le minus αlt 0
(16)
Moreover in case (c) we also have
D+W1(t) _xi(t)le a
liiW1(t)
rmi
alii
minus W1(t)1113890 1113891le minus αlt 0 i 1 or 2
(17)
From what we have discussed above it yields that ifW1(0)gtM1 then W1(t) is strictly monotone decreasingwith speed at least α so there exists T1 gt 0 such that for anytime tgeT1 W1(t) max x1(t) x2(t)1113864 1113865leM1 which admits
lim supt⟶+infin
x1(t)leM1 M2 maxrm1
al11
rm2
al22
1113896 1113897 (18)
lim supt⟶+infin
x2(t)leM1 M2 maxrm1
al11
rm2
al22
1113896 1113897 (19)
According to the fifth equation of system (2) we have
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)le em1 minus f
l1u1(t) + q
m1 M1
(20)
Using Lemma 1 we can deduce
lim supt⟶+infin
u1(t)leem1 + qm
1 M1
fl1
N1 (21)
Similarly in light of the last two equations of system (26)we then have
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
le e2(t) minus f2(t)u2(t)le em2 minus f
l2u2(t)
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
le e3(t) minus f3(t)u3(t)le em3 minus f
l3u3(t)
(22)
By utilizing Lemma 1 again we can get
lim supt⟶+infin
u2(t)leem2
fl2 N2 (23)
lim supt⟶+infin
u3(t)leem3
fl3 N3 (24)
From the third and fourth equations of system (2) wehave
_x3(t) x3(t)1113890 minus r3(t) minus a33(t)x3 t minus τ1( 1113857
+a31(t)x1 t minus τ2( 1113857
b13(t) + x1 t minus τ2( 1113857+ d2(t)u2(t)1113891
lex3(t) minus rl3 minus a
l33x3 t minus τ1( 1113857 +
am31M1
bl13 +M1
+ dm2 N21113890 1113891
_x4(t) x4(t)1113890 minus r4(t) minus a44(t)x4 t minus τ3( 1113857
+a41(t)x1 t minus τ4( 1113857
b14(t) + x1 t minus τ4( 1113857+ d3(t)u3(t)1113891
lex4(t) minus rl4 minus a
l44x4 t minus τ3( 1113857 +
am41M1
bl14 +M1
+ dm3 N31113890 1113891
(25)
By Lemma 3 combining with (H1) and (H2) we have
lim supt⟶+infin
x3(t)leam31M1 bl
13 +M1( 1113857 + dm2 N2 minus rl
3
al33
times expam31M1
bl13 +M1
dm2 N2 minus r
l31113888 1113889τ11113890 1113891
M3
(26)
lim supt⟶+infin
x4(t)leam41M1 bl
14 +M1( 1113857 + dm3 N3 minus rl
4
al44
times expam41M1
bl14 +M1
+ dm3 N3 minus r
l41113888 1113889τ31113890 1113891
M4
(27)
On the contrary from the first equation of system (2) itfollows that
_x1(t) x1(t) r1(t) minus a11(t)x1(t)1113858
minusa13(t)x3(t)
b13(t) + x1(t)minus
a14(t)x4(t)
b14(t) + x1(t)
minus d1(t)u1(t)1113859 +D1(t) x2(t) minus x1(t)( 1113857
gex1(t) r1(t) minus a11(t)x1(t) minusa13(t)x3(t)
b13(t)1113890
minusa14(t)x4(t)
b14(t)minus d1(t)u1(t) minus D1(t)1113891
gex1(t) rl1 minus a
m11x1(t) minus
am13M3
bl13
minusam14M4
bl14
minus dm1 N1 minus D
m11113890 1113891
(28)
By Lemma 2 and assumption (H3) we have
6 Journal of Mathematics
lim inft⟶+infin
x1(t)gerl1
am11minus
am13M3
bl13a
m11minus
am14M4
bl14a
m11
minusdm1 N1
am11
minusDm
1am11
m1
(29)
For the second equation of system (2) it holds that
_x2(t) x2(t) r2(t) minus a22(t)x2(t)1113858 1113859
+D2(t) x1(t) minus x2(t)( 1113857
gex2(t) r2(t) minus a22(t)x2(t) minus D2(t)1113858 1113859
gex2(t) rl2 minus a
m22x2(t) minus D
m21113960 1113961
(30)
From assumption (H4) and by Lemma 2 we can get
lim inft⟶+infin
x2(t)gerl2 minus Dm
2am22
m2 (31)
For the fifth equation of system (2) we have
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)
ge el1 minus f
m1 u1(t) + q
l1m1
(32)
By Lemma 1 it holds that
lim inft⟶+infin
u1(t)geel1 + ql
1m1
fm1
n1 (33)
For the sixth and the seventh equations of system (2) wecan obtain
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
ge el2 minus f
m2 u2(t) minus q
m2 M3
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
ge el3 minus f
m3 u3(t) minus q
m3 M4
(34)
By Lemma 1 (H5) and (H6) we have
lim inft⟶+infin
u2(t)geel2 minus qm
2 M3
fm2
n2 (35)
lim inft⟶+infin
u3(t)geel3 minus qm
3 M4
fm3
n3 (36)
According to the third and the fourth equations ofsystem (2) we have
_x3(t) x3(t)1113890 minus r3(t) minus a33(t)x3 t minus τ1( 1113857
+a31(t)x1 t minus τ2( 1113857
b13(t) + x1 t minus τ2( 1113857+ d2(t)u2(t)
ge x3(t) minus rm3 minus a
m33x3 t minus τ1( 1113857 +
al31m1
bm13 +m1
+ dl2n21113890 1113891
_x4(t) x4(t)1113890 minus r4(t) minus a44(t)x4 t minus τ3( 1113857
+a41(t)x1 t minus τ4( 1113857
b14(t) + x1 t minus τ4( 1113857+ d3(t)u3(t)1113891
ge x4(t)1113890 minus rm4 minus a
m44x4 t minus τ3( 1113857
+al41m1
bm14 +m1
+ dl3n31113891
(37)
Using Lemma 4 (H7) and (H8) we also derive that
lim inft⟶+infin
x3(t)geal31m1( 1113857 bm
13 +m1( 1113857 + dl2n2 minus rm
3am33
times expal31m1
bm13 +m1
+ dl2n2 minus r
m3 minus a
m33M31113888 1113889τ11113890 1113891
m3
(38)
lim inft⟶+infin
x4(t)geal41m1( 1113857 bm
14 +m1( 1113857 + dl3n3 minus rm
4am44
times expal41m1
bm14 +m1
+ dl3n3 minus r
m4 minus a
m44M41113888 11138891113890 1113891τ3
m4
(39)
Summarizing (18)ndash(39) we complete the induction ofeorem 1
Remark 2 It is obvious that the proof method for Lemma21 in [29] is the differential inequality theory while that ofthis article is the delay differential inequality theory Fromthe result of eorem 1 the feedback control items anddelays have influence on the permanence of system (2) Inother words the densities of the prey and predator pop-ulations are uniformly bounded when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H8)
3 Global Attractivity
In this section the global attractivity of system (2) will bestudied To get the sufficient conditions for global attractivity ofsystem (2) we firstly give the following definition and Lemma
Journal of Mathematics 7
Definition 2 System (2) is said to be globally attractive ifthere exists a positive solution
X(t) x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)( 1113857
(40)
of system (2) such that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0
limt⟶+infin
ui(t) minus vi(t)1113868111386811138681113868
1113868111386811138681113868 0
i 1 2 3 4 j 1 2 3
(41)
for any other positive solutionY(t) (y1(t) y2(t) y3(t) y4(t) v1(t) v2(t) v3(t)) of sys-tem (2)
Lemma 5 (see [33]) If the function f(t) R+⟶ R isuniformly continuous and the limit limt⟶+infin 1113938
t
0 f(s)ds existsand is finite then limt⟶+infinf(t) 0
Next we state and prove our main result with respect tothe global attractivity for system (2)
Theorem 2 Assume that system (2) satisfies (H1)minus (H8) andthe following conditions
(H9) Ai gt 0 Bj gt 0 (i 1 2 3 4 j 1 2 3) where
B1 fl1 minus d
m1
B2 fl2 minus d
m2 minus M3d
m2 a
m33τ1
B3 fl3 minus d
m3 minus M4d
m3 a
m44τ3
A1 al11 minus
am13M3
bl13 +m1( 1113857
2 minusam14M4
bl14 +m1( 1113857
2 minusDm
2m2
minusam31b
m13
bl13 +m1( 1113857
2
minusM3a
m31a
m33τ1
bl13 +m1
minusam41b
m14
bl14 +m1( 1113857
2 minusM4a
m41a
m44τ3
bl14 +m1
minus qm1
A2 al22 minus Dm
1m1
A3 al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
+ dm2 N21113888 1113889a
m33τ1
minus M3 am33( 1113857
2τ1 minusam13b
m13 + am
13M1
bl13 +m1( 1113857
2 minus qm2
A4 al44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113888 1113889a
m44τ3
minus M4 am44( 1113857
2τ3 minusam14b
m14 + am
14M1
bl14 +m1( 1113857
2 minus qm3
(42)
-en system (2) is globally attractive
Proof Suppose that (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t)
u3(t)) and (y1(t) y2(t) y3(t) y4(t) v1(t) v2(t) v3(t)) areany two different positive solutions of system (2)en from
eorem 1 there exist positive constants Mi mi Njnj(i 1 2 3 4 j 1 2 3) and T such that
mi lexi(t) yi(t)leMi i 1 2 3 4
nj le uj(t) vj(t)leNj j 1 2 3(43)
We defineV1(t) lnx1(t) minus lny1(t)
11138681113868111386811138681113868111386811138681113868
V2(t) lnx2(t) minus lny2(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎨
⎩ (44)
Calculating the upper-right derivative of V1(t) andV2(t) along the solution of system (2) we have
1113944
2
i1D+Vi(T) 1113944
2
i1D+ lnxi(t) minus lnyi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961
le sgn x1(t) minus y1(t)1113864 11138651113890 minus a11(t) x1(t) minus y1(t)( 1113857
minusa13(t)b13(t) + a13(t)y1(t)( 1113857 x3(t) minus y3(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa13(t)y3(t) x1(t) minus y1(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa13(t)y3(t) x1(t) minus y1(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa14(t)b14(t) + a14(t)y1(t)( 1113857 x4(t) minus y4(t)( 1113857
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857
minusa14(t)y4(t) x1(t) minus y1(t)( 1113857
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857
minus d1(t) u1(t) minus v1(t)( 1113857 +D1(t)x2(t)
x1(t)minus
y2(t)
y1(t)1113888 11138891113891
+ sgn x2(t) minus y2(t)1113864 1113865 minus a22(t) x2(t) minus y2(t)( 11138571113858
+D2(t)x1(t)
x2(t)minus
y1(t)
y2(t)1113888 11138891113891
le minus a11(t) minusa13(t)y3(t)
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 11138571113888
minusa14(t)y4(t)
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 11138571113889
times x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868 minus a22(t) x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868
+a13(t)b13(t) + a13(t)y1(t)
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+a14(t)b14(t) + a14(t)y1(t)
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+ d1(t) u1(t) minus v1(t)1113868111386811138681113868
1113868111386811138681113868 + 1113957D1(t) + 1113957D2(t)
(45)where
8 Journal of Mathematics
1113957D1(t)
D1(t)x2(t)
x1(t)minus
y2(t)
y1(t)1113888 1113889 x1(t)gty1(t)
D1(t)y2(t)
y1(t)minus
x2(t)
x1(t)1113888 1113889 x1(t)lty1(t)
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
1113957D2(t)
D2(t)x1(t)
x2(t)minus
y1(t)
y2(t)1113888 1113889 x2(t)gty2(t)
D2(t)y1(t)
y2(t)minus
x1(t)
x2(t)1113888 1113889 x2(t)lty2(t)
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
(46)
Next we discuss 1113957D1(t) under the following three cases
(a) If x1(t)gty1(t) then
1113957D1(t)leD1(t)
x1(t)x2(t) minus y2(t)( 1113857
leDm
1m1
x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868
(47)
(b) If x1(t)lty1(t) then
1113957D1(t)leD1(t)
y1(t)y2(t) minus x2(t)( 1113857le
Dm1
m1x2(t) minus y2(t)
11138681113868111386811138681113868111386811138681113868
(48)
(c) If x1(t) y1(t) the same conclusion as (a) and (b)holds
Combining the conclusions in (a)ndash(c) we have
1113957D1(t)leDm
1m1
x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868 (49)
A similar argument shows that
1113957D2(t)leDm
2 (t)
mlsquo2x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868 (50)
By means of (45)ndash(50) we have
1113944
2
i1D+Vi(t)le minus a
l11 minus
am13M3
bl13 +m1( 1113857
2 minusam14M4
bl14 +m1( 1113857
2 minusDm
2m2
⎛⎝ ⎞⎠
times x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868 minus al22 minus
Dm1
m11113888 1113889 x2(t) minus y2(t)
11138681113868111386811138681113868111386811138681113868
+am13b
m13 + am
13M1
bl13 +m1( 1113857
2 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am14b
m14 + am
14M1
bl14 +m1( 1113857
2 x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868
+ dm1 u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868
(51)
Define
V31(t) lnx3(t) minus lny3(t)1113868111386811138681113868
1113868111386811138681113868 (52)
Calculating the upper right derivative of V31(t) along thesolution of system (2) it follows thatD+V31(t) sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3 t minus τ1( 1113857(1113858
minus y3 t minus τ1( 11138571113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ d2(t) u2(t) minus v2(t)( 11138571113859
sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3(t) minus y3(t)( 11138571113858
+ d2(t) u2(t) minus v2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+a33(t)1113946t
tminus τ1_x3(θ) minus _y3(θ)( 1113857dθ1113891
sgn x3(t) minus y3(t)1113864 1113865minus a33(t) x3(t) minus y3(t)( 11138571113859
+ d2(t) u2(t) minus v2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ a33(t)1113946t
tminus τ1x3(θ)1113890 minus r3(θ) minus a33(θ)x3 θ minus τ1( 11138571113888
+a31(θ)x1 θ minus τ2( 1113857
b13(θ) + x1 θ minus τ2( 1113857+ d2(θ)u2(θ)1113891
minus y3(θ)1113890 minus r3(θ) minus a33(θ)y3 θ minus τ1( 1113857
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)11138911113889dθ1113891
sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3(t) minus y3(t)( 11138571113858
+ d2(t) u2(t) minus y2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ a33(t)1113946t
tminus τ1x3(θ) minus y3(θ)( 1113857(
times 1113890 minus r3(θ) minus a33(θ)y3 θ minus τ1( 1113857
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
Journal of Mathematics 9
+ x3(θ)1113890 minus a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 1113857( 1113857
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857( 1113857
+ d2(θ) u2(θ) minus v2(θ)( 111385711138591113857dθ⎤⎦
le minus a33(t) x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 + d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ a33(t)1113946t
tminus τ11113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891 x3(θ) minus y3(θ)
11138681113868111386811138681113868111386811138681113868
+ x3(θ) a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+ d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(53)
Define
V32(t) 1113946t
tminus τ11113946
t
sa33 s + τ1( 1113857 1113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
times x3(θ) minus y3(θ)1113868111386811138681113868
1113868111386811138681113868
+ x3(θ)1113890a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
1113868111386811138681113868⎤⎦⎞⎠dθ ds
(54)
From (53) and (54) we have
1113944
2
i1D+V3i(t)le minus a33(t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+ d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ1a33 s + τ1( 1113857ds1113890r3(t) + a33(t)y3 t minus τ1( 1113857
+a31(t)y1 t minus τ2( 1113857
b13(t) + y1 t minus τ2( 1113857+ d2(t)v2(t)1113891
times x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 +M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
times a33(t) x3 t minus τ1( 1113857 minus y3 t minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
timesa31(t)
b13(t) + x1 t minus τ2( 1113857x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds times d2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(55)
We also define
V33(t) 1113946t
tminus τ2
a31 w + τ2( 1113857b13 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)( 1113857 b13 w + τ2( 1113857 + y1(w)( 1113857
timesx1(w) minus y1(w)|dw
+M3 1113946t
tminus τ11113946
w+τ1
wa33 s + τ1( 1113857a33 w + τ1( 1113857
times x3(w) minus y3(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M3 1113946t
tminus τ21113946
w+τ2
w+τ2minus τ1a33 s + τ1( 1113857
a31 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(56)
10 Journal of Mathematics
and let
V3(t) V31(t) + V32(t) + V33(t) (57)
According to (55) and (56) calculating the upper rightderivative of V3(t) we have
D+V3(t)le minus a
l33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+dm2 N21113889 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds
minus M3am33 1113946
t+τ1
ta
m33 s + τ1( 1113857ds1113891 x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3am31
bl13 +m1
⎡⎣
times1113946t+τ2
t+τ2minus τ1a
m33 s + τ1( 1113857ds1113891 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm2 +M3d
m2 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds1113890 1113891
times u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
le minus al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+ dm2 N21113857a
m33τ1 minus M3 a
m33( 1113857
2τ11113961 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3a
m31a
m33τ1
bl13 +m1
⎛⎝ ⎞⎠ x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868
+ dm2 +M3d
m2 a
m33τ1( 1113857 u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(58)
Similarly we define
V41(t) lnx4(t) minus lny4(t)1113868111386811138681113868
1113868111386811138681113868 (59)
Calculating the upper right derivative of V41(t) along thesolution of system (2) we get
D+V41(t) sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4 t minus τ3( 1113857(1113858
minus y4 t minus τ3( 11138571113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+d3(t) u3(t) minus v3(t)( 11138571113859
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+a44(t)1113946t
tminus τ3_x4(θ) minus _y4(θ)( 1113857dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus r4(θ) minus a44(θ)x4 θ minus τ3( 11138571113858(
+a41(θ)x1 θ minus τ4( 1113857
b14(θ) + x1 θ minus τ4( 1113857+ d3(θ)u3(θ)1113891
minus y4(θ) minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)11138911113889dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t) minus y4(t)( 11138571113858
+ d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus y4(θ)( 1113857
times minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)1113891
+ x4(θ) minus a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 1113857( 11138571113858
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857( 1113857
+d3(θ) u3(θ) minus v3(θ)( 111385711138591113857dθ1113859
le minus a44(t) x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 + d3(t) u3(t) minus v3(t)1113868111386811138681113868
1113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ a44(t)1113946t
tminus τ3r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+ d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(60)
Journal of Mathematics 11
We define
V42(t) 1113946t
tminus τ31113946
t
sa44 s + τ3( 1113857 r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ ds
(61)
By (60) and (61) we have
1113944
2
i1D+V4i(t)le minus a44(t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868 + d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ3a44 s + τ3( 1113857ds times 1113890r4(t) + a44(t)y4 t minus τ3( 1113857
+a41(t)y1 t minus τ4( 1113857
b14(t) + y1 t minus τ4( 1113857+ d3(t)v3(t)1113891
times x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 +M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
times a44(t) x4 t minus τ3( 1113857 minus y4 t minus τ3( 11138571113868111386811138681113868
1113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
timesa41(t)
b14(t) + x1 t minus τ4( 1113857x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds times d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(62)
Let
V4(t) V41(t) + V42(t) + V43(t) (63)
where
V43(t) 1113946t
tminus τ4
a41 w + τ4( 1113857b14 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)( 1113857 b14 w + τ4( 1113857 + y1(w)( 1113857
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868dw
+M4 1113946t
tminus τ31113946
w+τ3
wa44 s + τ3( 1113857a44 w + τ3( 1113857
times x4(w) minus y4(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M4 1113946t
tminus τ41113946
w+τ4
w+τ4minus τ3a44 s + τ3( 1113857
a41 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(64)
By (62) and (64) we have
D+V4(t)le minus a
l44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113890 11138911113888
times 1113946t
tminus τ3a
m44 s + τ3( 1113857ds
minus M4am44 1113946
t+τ3
ta
m44 s + τ3( 1113857ds1113889 x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+am41b
m14
bl14 +m1( 1113857
2 +M4am41
bl14 +m1
⎛⎝
times1113946t+τ4
t+τ4 minus τ3a
m44 s + τ3( 1113857ds1113889 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm3 +M4d
m3 1113946
t
tminus τ3a
m44 s + τ3( 1113857ds1113888 1113889 u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(65)
Moreover define V5(t) V6(t) andV7(t) by
V5(t) ln u1(t) minus ln v1(t)1113868111386811138681113868
1113868111386811138681113868
V6(t) ln u2(t) minus ln v2(t)1113868111386811138681113868
1113868111386811138681113868
V7(t) ln u3(t) minus ln v3(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
(66)
Calculating the upper right derivative of V5(t) V6(t)and V7(t) along the solutions of system (2) it holds that
D+V5(t)le sgn u1(t) minus v1(t)( 1113857 minus f1(t) u1(t)(1113858
minus v1(t)1113857 + q1(t) x1(t) minus y1(t)( 11138571113859
le minus fl1(t) u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868 + q
m1 (t) x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
(67)
D+V6(t)le sgn u2(t) minus v2(t)( 1113857 minus f2(t) u2(t)(1113858
minus v2(t)1113857 minus q2(t) x3(t) minus y3(t)( 11138571113859
le minus fl2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
+ qm2 (t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
(68)
12 Journal of Mathematics
D+V7(t)le sgn u3(t) minus v3(t)( 1113857 minus f3(t) u3(t)(1113858
minus v3(t)1113857 minus q3(t) x4(t) minus y4(t)( 11138571113859
le minus fl3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+ qm3 (t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
(69)
Finally we define a Lyapunov function as follows
V(t) 11139447
i1Vi(t) (70)
From (51) (58) (65) and (67)ndash(69) we can get that forall tgeT + τ
D+V(t)le minus 1113944
4
i1Ai xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 minus 1113944
3
j1Bj uj(t) minus vj(t)
11138681113868111386811138681113868
11138681113868111386811138681113868
(71)
In view of conditions (H9) of eorem 2 there exists aconstant αgt 0 and Tlowast gtT + τ such that for all tgeTlowast it holdsthat
Ai ge αgt 0
Bj ge αgt 0
i 1 2 3 4 j 1 2 3
(72)
Integrating fromTlowast to t on both sides of (71) and by (72)we have
V(t) + α1113946t
Tlowast1113944
4
i1xi(s) minus yi(s)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(s) minus vj(s)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠ds
leV Tlowast
( 1113857lt +infin
(73)
erefore V(t) is bounded on [Tlowast+infin) and we have
1113946infin
Tlowast1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠dsleV(T)
αlt +infin
(74)
By (74) we also have
1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113874 1113875 isin L1(T+infin)
(75)
Applying eorem 1 we can obtain that |xi(t) minus yi(t)||uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 and their derivativesremain bounded on [Tlowast+infin) and |xi(t) minus yi(t)| and|uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 are uniformly con-tinuous on [Tlowast+infin) By Lemma 5 we can conclude that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0 i 1 2 3 4
limt⟶+infin
uj(t) minus vj(t)11138681113868111386811138681113868
11138681113868111386811138681113868 0 j 1 2 3(76)
is completes the proof and the solution of system (2)is globally attractive
Remark 3 From the result ofeorem 2 the feedback controlitems and delays have influence on the globally attractive of
system (2) namely the population densities for the system willapproach to a positive equilibrium when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H9)
Remark 4 It should not be difficult to see that the methodand skills of constructing a suitable Lyapunov function in thepaper are very different with those of [29] and the method ofconstructing Lyapunov function in [29] cannot be used inthis manuscript
4 Periodic Solution
Assuming that coefficients of system (2) are positive con-tinuous and ω minus periodic functions then system (2) ischanged to the ω minus periodic system In this section we shallobtain conditions for the existence uniqueness and stabilityof a positive periodic for system (2) by using the fixed-pointtheory and some new analysis method For convenience wegive firstly the following lemma
Lemma 6 (see [34]) Let S sub Rn be convex and compact Ifmapping T S⟶ S is continuous then there exists a fixedpoint ie there exists xlowast isin S such that T(xlowast) xlowast
Next we state and prove our main result with respect tothe periodic solution for system (2)
Theorem 3 Assume that system (2) is a ω-periodic systemand satisfies conditions (H1) minus (H9) then system (2) has apositive unique ω-periodic solution which is globally as-ymptotically stable
Proof According to the existence and uniqueness theorem ofsolutions of functional differential equations [35ndash38] we candefine a Poincare mapping T R7
+⟶ R7+ as follows
T X0( 1113857 X tω X0( 1113857 (77)
where X(tω X0) (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)) be a positive solution of system (2) with initialconditions (7) And define
S x1 x2 x3 x4 u1 u2 u3( 1113857 isin R7+
mi lexi leMi i 1 2 3 4
nj le uj leNj j 1 2 3
111386811138681113868111386811138681113868111386811138681113868
⎧⎨
⎩
⎫⎬
⎭
(78)
en it is obvious that S sub R7+ is a convex and compact set
By eorem 1 and the continuity of solution of system (2)with respect to initial conditions (7) the mappingT S⟶ S is continuous Furthermore it is not difficult toshow that system (2) has a positive unique ω minus periodicsolution which is globally asymptotic stability by usingLemma 6 and eorem 2
Remark 5 From the result of eorem 3 the feedbackcontrol items and delays have influence on the periodic ofω minus periodic system (2) at is the population densities forthe periodic system will tend to a positive ω minus periodicequilibrium when system (2) satisfies ω minus periodic initialconditions (7) and assumptions (H1) minus (H9)
Journal of Mathematics 13
5 Numerical Simulation
In this section we give some numerical simulations to illustratethe feasibility of our main results In order to facilitate theverification of eorem 3 where the system is a periodicsystem we select the periodic function as the coefficient ofsystem (2) and consider the following multidelay periodicpredator-prey model with feedback control and prey diffusion
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)minus
(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
minus (0015 + 0005 sin πt)u1(t)1113859
+(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t) (25 + 05 sin πt) minus (225 + 025 cos πt)x21113858 1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)[minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857
+(05 + 01 sin πt)u2(t)1113859
_x4(t) x4(t)[minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857
+(045 + 005 sin πt)u3(t)1113859
_u1(t) (15 + 05 cos πt) minus (16 + 04 sin πt)u1(t)
+(015 + 005 sin πt)x1(t)
_u2(t) (2 + 05 cos πt) minus (105 + 005 sin πt)u2(t)
minus (15 + 05 sin πt)x3(t)
_u3(t) (355 + 005 cos πt) minus (345 + 045 sin πt)u3(t)
minus (225 + 025 sin πt)x4(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(79)
where time delay τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 1 t isin [minus 004 0]
x2(0) 1
x3(t) sin t + 1 t isin [minus 001 0]
x4(t) sin t + 1 t isin [minus 003 0]
ui(0) 1 (i 1 2 3)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(80)
From the conditions of eorem 3 we select somespecific parameter values shown in models (79) and (80)according to the calculation Of course the choiceof parameters in the model is not unique It is not difficultto verify that system (79) satisfies the conditions of eorems1ndash3 It holds from eorems 1 and 2 that system (79) ispermanent and globally attractive By means of eorem 3system (79) has a positive unique periodic solution which isglobally asymptotic stability By using the software packageMATLAB 71 we can solve the numerical solutions of systems(79) and (80) as shown in Figures 1ndash3 Figure 1 shows that thepermanence of system (79) with initial conditions (80) andtime delay τ1 001 τ2 002 τ3 003 and τ4 004 Itis not difficult to see from Figure 2 that system (79) isglobally attractive Figure 3 shows the dynamic behavior ofsystem (79)
In general ecosystems represented by deterministicLotkandashVolterra models are not suitable for describing thereal behavior of population dynamics e feedbackcontrol variable we described above is strictly related tothe environmental noise effect It is well known that theenvironmental noise is a very important factor in mod-eling natural phenomena in ecological systems At pres-ent it is impossible to model population dynamicswithout considering the interaction between the ecolog-ical system and environmental noise always present innature In fact the environmental noise acts construc-tively producing counterintuitive effects and interestingnoise-induced phenomena such as stochastic resonancenoise-enhanced stability and resonant activation (cf[39ndash43]) In addition the study of nonlinear dynamicalsystems with external noise has found some counterin-tuitive phenomena that play a constructive role in noiseand are highly fundamental and practical interests inmany scientific fields (cf [44ndash47]) e presence of noisesources can alter the stability of the ecosystem (cf[48ndash51]) In addition this noise in general breaks thesymmetry of the ecosystem see for example [52] andmoreover it gives rise to extinction phenomena becausethe multiplicative noise has the effect of an absorbingbarrier see for example [53]
As a response to this we consider the following cor-responding stochastic predator-prey model with the mul-tiplicative noise sources
14 Journal of Mathematics
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)
minus(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
+Dξ1(t)1113859 +(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t)[(25 + 05 sin πt)
minus (225 + 025 cos πt)x2(t)1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)1113890 minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857+Dξ2(t)1113891
_x4(t) x4(t)1113890 minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857+Dξ3(t)1113891
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(81)
where ξi(t) are δ-correlated Gaussian white noise sourceswith zero mean that is langδi(t)rang 0 andlangδi(t)δi(tprime)rang Diδ(t minus tprime)δij with Di the noise intensities(here we choose all equal noise intensities that is Di D)and time delays τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 05 t isin [minus 004 0]
x2(0) 05
x3(t) sin t + 05 t isin [minus 001 0]
x4(t) sin t + 05 t isin [minus 003 0]
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(82)
x1(t)x2(t)
x3(t)x4(t)
04
05
06
07
08
09
1
11
12
13
5 10 15 20 25 30 35 40 45 500t
(a)
u1(t)u2(t)u3(t)
07
08
09
1
11
12
13
14
15
16
5 10 15 20 25 30 35 40 45 500t
(b)
Figure 1 e numerical solution of system (79) with initial condition (60) (80)
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
16
2 4 6 8 10 12 14 16 18 200t
Figure 2 Numerical solution of system (79) with different initialconditions
Journal of Mathematics 15
0
02
04
06
08
1
12
14
16x 3
(t)
02 04 06 08 1 12 14 160x2(t)
(a)
1
15
2
25
x 2(t)
05 1 15 2 250x1(t)
(b)
02
04
06
08
1
12
14
16
18
2
22
x 3(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(c)
0
02
04
06
08
1
12
14
16
x 4(t)
04 06 08 1 12 14 160 02x2(t)
(d)
02
04
06
08
1
12
14
16
18
2
x 4(t)
04 06 08 1 12 14 16 18 202x3(t)
(e)
02
04
06
08
1
12
14
16
18
2
22
x 4(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(f )
Figure 3 Continued
16 Journal of Mathematics
005
115
2
005
115
2
x2(t)x3 (t)
0
05
1
15
2
x 4(t)
(g)
051
152
25
115
225
x1(t)x2 (t)
0
05
1
15
2
25
x 3(t)
(h)
051
152
25
115
2250
05
1
15
2
25
x 4(t)
x1(t)x2 (t)
(i)
x1(t)x3 (t)
051
152
005
115
20
05
1
15
2
x 4(t)
(j)
Figure 3 Dynamic behavior of system (79)
D = 0005
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(a)
D = 001
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(b)
Figure 4 Continued
Journal of Mathematics 17
D = 002
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(c)
x1(t)x2(t)
x3(t)x4(t)
D = 004
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(d)
Figure 4 e numerical solutions of systems (81) and (82) with very low noise intensities
D = 01
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(a)
D = 02
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(b)
Figure 5 Continued
18 Journal of Mathematics
D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

M1 M2 maxrm1
al11
rm2
al22
1113896 1113897
N1 em1 + qm
1 M1
fl1
N2 em2
fl2
N3 em3
fl3
M3 am31M1( 1113857 bl
13 +M1( 1113857 + dm2 N2 minus rl
3
al33
times exp
middotam31M1
bl13 +M1
+ dm2 N2 minus r
l31113888 1113889τ11113890 1113891
M4 am41M1( 1113857 bl
14 +M1( 1113857 + dm3 N3 minus rl
4
al44
times exp
middotam41M1
bl14 +M1
+ dm3 N3 minus r
l41113888 1113889τ31113890 1113891
m1 rl1 minus am
13M3bl13 minus am
14M4bl14 minus dm
1 N1 minus Dm1
am11
m2 rl2 minus Dm
2am22
n1 el1 + ql
1m1
fm1
n2 el2 minus qm
2 M3
fm2
n3 el3 minus qm
3 M4
fm3
m3 al31m1( 1113857 bm
13 +m1( 1113857 + dl2n2 minus rm
3am33
times exp
middotal31m1
bm13 +m1
+ dl2n2 minus r
m3 minus a
m33M31113888 1113889τ11113890 1113891
m4 al41m1( 1113857 bm
14 +m1( 1113857 + dl3n3 minus rm
4am44
times exp
middotal41m1
bm14 +m1
+ dl3n3 minus r
m4 minus a
m44M41113888 1113889τ31113890 1113891
(11)
Next we state and prove our main result with respect tothe permanent for system (2)
Theorem 1 Suppose that system (2) satisfies the initialconditions (7) and following assumptions
(H1) rl3 lt (am
31M1)(bl13 +M1) + dm
2 N2
(H2) rl4 lt (am
41M1)(bl14 +M1) + dm
3 N3
(H3) rl1 gt am
13M3bl13 + am
14M4bl14 + dm
1 N1 +Dm1
(H4) rl2 gtDm
2
(H5) el2 gt qm
2 M3
(H6) el3 gt qm
3 M4
(H7) rm3 lt (al
31m1)(bm13 +m1) + dl
2n2
(H8) rm4 lt (al
41m1)(bm14 +m1) + dl
3n3
-en system (2) is permanent
Proof According to the first and the second equations ofsystem (2) we define W1(t) max x1(t) x2(t)1113864 1113865 and cal-culate the upper right derivative of W1(t) along the positivesolution of system (2) and we have that
(P1) if x1(t)gex2(t) then
D+W1(t) _x1(t) x1(t) r1(t) minus a11(t)x1(t)1113858
minusa13(t)x3(t)
b13(t) + x1(t)minus
a14(t)x4(t)
b14(t) + x1(t)
minus d1(t)u1(t)1113859 +D1(t) x2(t) minus x1(t)( 1113857
lex1(t) r1(t) minus a11(t)x1(t)1113858 1113859
lex1(t) rm1 minus a
l11x1(t)1113960 1113961
W1(t) rm1 minus a
l11W1(t)1113960 1113961
(12)
(P2) if x1(t)lex2(t) then
D+W1(t) _x2(t) x2(t) r2(t) minus a22(t)x2(t)1113858 1113859
+D2(t) x1(t) minus x2(t)( 1113857
le x2(t) r2(t) minus a22(t)x2(t)1113858 1113859
le x2(t) rm2 minus a
l22x2(t)1113960 1113961
W1(t) rm2 minus a
l22W1(t)1113960 1113961
(13)
It follows from (P1) and (P2) that
D+W1(t)leW1(t) r
mi minus a
liiW1(t)1113960 1113961 i 1 2 (14)
By (14) we can also deduce the following
(A) If W1(0) max x1(0) x2(0)1113864 1113865leM1 then we havemax x1(t) x2(t)1113864 1113865leM1 tge 0
(B) If W1(0) max x1(0) x2(0)1113864 1113865gtM1 take appro-priate αgt 0 we have the following three possibilities
(a) W1(0) x1(0)gtM1 (x1(0)gt x2(0))(b) W1(0) x2(0)gtM1 (x1(0)lt x2(0))(c) W1(0) x1(0) x2(0)gtM1
If (a) holds then there exists εgt 0 t isin [0 ε) such thatW1(t) x1(t)gtM1 en we get
Journal of Mathematics 5
D+W1(t) _x1(t)le a
l11W1(t)
rm1
al11minus W1(t)1113890 1113891le minus αlt 0
(15)
Similarly if (b) holds there exists εgt 0 t isin [0 ε) andW1(t) x2(t)gtM1 to derive
D+W1(t) _x2(t)le a
l22W1(t)
rm2
al22minus W1(t)1113890 1113891le minus αlt 0
(16)
Moreover in case (c) we also have
D+W1(t) _xi(t)le a
liiW1(t)
rmi
alii
minus W1(t)1113890 1113891le minus αlt 0 i 1 or 2
(17)
From what we have discussed above it yields that ifW1(0)gtM1 then W1(t) is strictly monotone decreasingwith speed at least α so there exists T1 gt 0 such that for anytime tgeT1 W1(t) max x1(t) x2(t)1113864 1113865leM1 which admits
lim supt⟶+infin
x1(t)leM1 M2 maxrm1
al11
rm2
al22
1113896 1113897 (18)
lim supt⟶+infin
x2(t)leM1 M2 maxrm1
al11
rm2
al22
1113896 1113897 (19)
According to the fifth equation of system (2) we have
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)le em1 minus f
l1u1(t) + q
m1 M1
(20)
Using Lemma 1 we can deduce
lim supt⟶+infin
u1(t)leem1 + qm
1 M1
fl1
N1 (21)
Similarly in light of the last two equations of system (26)we then have
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
le e2(t) minus f2(t)u2(t)le em2 minus f
l2u2(t)
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
le e3(t) minus f3(t)u3(t)le em3 minus f
l3u3(t)
(22)
By utilizing Lemma 1 again we can get
lim supt⟶+infin
u2(t)leem2
fl2 N2 (23)
lim supt⟶+infin
u3(t)leem3
fl3 N3 (24)
From the third and fourth equations of system (2) wehave
_x3(t) x3(t)1113890 minus r3(t) minus a33(t)x3 t minus τ1( 1113857
+a31(t)x1 t minus τ2( 1113857
b13(t) + x1 t minus τ2( 1113857+ d2(t)u2(t)1113891
lex3(t) minus rl3 minus a
l33x3 t minus τ1( 1113857 +
am31M1
bl13 +M1
+ dm2 N21113890 1113891
_x4(t) x4(t)1113890 minus r4(t) minus a44(t)x4 t minus τ3( 1113857
+a41(t)x1 t minus τ4( 1113857
b14(t) + x1 t minus τ4( 1113857+ d3(t)u3(t)1113891
lex4(t) minus rl4 minus a
l44x4 t minus τ3( 1113857 +
am41M1
bl14 +M1
+ dm3 N31113890 1113891
(25)
By Lemma 3 combining with (H1) and (H2) we have
lim supt⟶+infin
x3(t)leam31M1 bl
13 +M1( 1113857 + dm2 N2 minus rl
3
al33
times expam31M1
bl13 +M1
dm2 N2 minus r
l31113888 1113889τ11113890 1113891
M3
(26)
lim supt⟶+infin
x4(t)leam41M1 bl
14 +M1( 1113857 + dm3 N3 minus rl
4
al44
times expam41M1
bl14 +M1
+ dm3 N3 minus r
l41113888 1113889τ31113890 1113891
M4
(27)
On the contrary from the first equation of system (2) itfollows that
_x1(t) x1(t) r1(t) minus a11(t)x1(t)1113858
minusa13(t)x3(t)
b13(t) + x1(t)minus
a14(t)x4(t)
b14(t) + x1(t)
minus d1(t)u1(t)1113859 +D1(t) x2(t) minus x1(t)( 1113857
gex1(t) r1(t) minus a11(t)x1(t) minusa13(t)x3(t)
b13(t)1113890
minusa14(t)x4(t)
b14(t)minus d1(t)u1(t) minus D1(t)1113891
gex1(t) rl1 minus a
m11x1(t) minus
am13M3
bl13
minusam14M4
bl14
minus dm1 N1 minus D
m11113890 1113891
(28)
By Lemma 2 and assumption (H3) we have
6 Journal of Mathematics
lim inft⟶+infin
x1(t)gerl1
am11minus
am13M3
bl13a
m11minus
am14M4
bl14a
m11
minusdm1 N1
am11
minusDm
1am11
m1
(29)
For the second equation of system (2) it holds that
_x2(t) x2(t) r2(t) minus a22(t)x2(t)1113858 1113859
+D2(t) x1(t) minus x2(t)( 1113857
gex2(t) r2(t) minus a22(t)x2(t) minus D2(t)1113858 1113859
gex2(t) rl2 minus a
m22x2(t) minus D
m21113960 1113961
(30)
From assumption (H4) and by Lemma 2 we can get
lim inft⟶+infin
x2(t)gerl2 minus Dm
2am22
m2 (31)
For the fifth equation of system (2) we have
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)
ge el1 minus f
m1 u1(t) + q
l1m1
(32)
By Lemma 1 it holds that
lim inft⟶+infin
u1(t)geel1 + ql
1m1
fm1
n1 (33)
For the sixth and the seventh equations of system (2) wecan obtain
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
ge el2 minus f
m2 u2(t) minus q
m2 M3
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
ge el3 minus f
m3 u3(t) minus q
m3 M4
(34)
By Lemma 1 (H5) and (H6) we have
lim inft⟶+infin
u2(t)geel2 minus qm
2 M3
fm2
n2 (35)
lim inft⟶+infin
u3(t)geel3 minus qm
3 M4
fm3
n3 (36)
According to the third and the fourth equations ofsystem (2) we have
_x3(t) x3(t)1113890 minus r3(t) minus a33(t)x3 t minus τ1( 1113857
+a31(t)x1 t minus τ2( 1113857
b13(t) + x1 t minus τ2( 1113857+ d2(t)u2(t)
ge x3(t) minus rm3 minus a
m33x3 t minus τ1( 1113857 +
al31m1
bm13 +m1
+ dl2n21113890 1113891
_x4(t) x4(t)1113890 minus r4(t) minus a44(t)x4 t minus τ3( 1113857
+a41(t)x1 t minus τ4( 1113857
b14(t) + x1 t minus τ4( 1113857+ d3(t)u3(t)1113891
ge x4(t)1113890 minus rm4 minus a
m44x4 t minus τ3( 1113857
+al41m1
bm14 +m1
+ dl3n31113891
(37)
Using Lemma 4 (H7) and (H8) we also derive that
lim inft⟶+infin
x3(t)geal31m1( 1113857 bm
13 +m1( 1113857 + dl2n2 minus rm
3am33
times expal31m1
bm13 +m1
+ dl2n2 minus r
m3 minus a
m33M31113888 1113889τ11113890 1113891
m3
(38)
lim inft⟶+infin
x4(t)geal41m1( 1113857 bm
14 +m1( 1113857 + dl3n3 minus rm
4am44
times expal41m1
bm14 +m1
+ dl3n3 minus r
m4 minus a
m44M41113888 11138891113890 1113891τ3
m4
(39)
Summarizing (18)ndash(39) we complete the induction ofeorem 1
Remark 2 It is obvious that the proof method for Lemma21 in [29] is the differential inequality theory while that ofthis article is the delay differential inequality theory Fromthe result of eorem 1 the feedback control items anddelays have influence on the permanence of system (2) Inother words the densities of the prey and predator pop-ulations are uniformly bounded when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H8)
3 Global Attractivity
In this section the global attractivity of system (2) will bestudied To get the sufficient conditions for global attractivity ofsystem (2) we firstly give the following definition and Lemma
Journal of Mathematics 7
Definition 2 System (2) is said to be globally attractive ifthere exists a positive solution
X(t) x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)( 1113857
(40)
of system (2) such that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0
limt⟶+infin
ui(t) minus vi(t)1113868111386811138681113868
1113868111386811138681113868 0
i 1 2 3 4 j 1 2 3
(41)
for any other positive solutionY(t) (y1(t) y2(t) y3(t) y4(t) v1(t) v2(t) v3(t)) of sys-tem (2)
Lemma 5 (see [33]) If the function f(t) R+⟶ R isuniformly continuous and the limit limt⟶+infin 1113938
t
0 f(s)ds existsand is finite then limt⟶+infinf(t) 0
Next we state and prove our main result with respect tothe global attractivity for system (2)
Theorem 2 Assume that system (2) satisfies (H1)minus (H8) andthe following conditions
(H9) Ai gt 0 Bj gt 0 (i 1 2 3 4 j 1 2 3) where
B1 fl1 minus d
m1
B2 fl2 minus d
m2 minus M3d
m2 a
m33τ1
B3 fl3 minus d
m3 minus M4d
m3 a
m44τ3
A1 al11 minus
am13M3
bl13 +m1( 1113857
2 minusam14M4
bl14 +m1( 1113857
2 minusDm
2m2
minusam31b
m13
bl13 +m1( 1113857
2
minusM3a
m31a
m33τ1
bl13 +m1
minusam41b
m14
bl14 +m1( 1113857
2 minusM4a
m41a
m44τ3
bl14 +m1
minus qm1
A2 al22 minus Dm
1m1
A3 al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
+ dm2 N21113888 1113889a
m33τ1
minus M3 am33( 1113857
2τ1 minusam13b
m13 + am
13M1
bl13 +m1( 1113857
2 minus qm2
A4 al44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113888 1113889a
m44τ3
minus M4 am44( 1113857
2τ3 minusam14b
m14 + am
14M1
bl14 +m1( 1113857
2 minus qm3
(42)
-en system (2) is globally attractive
Proof Suppose that (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t)
u3(t)) and (y1(t) y2(t) y3(t) y4(t) v1(t) v2(t) v3(t)) areany two different positive solutions of system (2)en from
eorem 1 there exist positive constants Mi mi Njnj(i 1 2 3 4 j 1 2 3) and T such that
mi lexi(t) yi(t)leMi i 1 2 3 4
nj le uj(t) vj(t)leNj j 1 2 3(43)
We defineV1(t) lnx1(t) minus lny1(t)
11138681113868111386811138681113868111386811138681113868
V2(t) lnx2(t) minus lny2(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎨
⎩ (44)
Calculating the upper-right derivative of V1(t) andV2(t) along the solution of system (2) we have
1113944
2
i1D+Vi(T) 1113944
2
i1D+ lnxi(t) minus lnyi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961
le sgn x1(t) minus y1(t)1113864 11138651113890 minus a11(t) x1(t) minus y1(t)( 1113857
minusa13(t)b13(t) + a13(t)y1(t)( 1113857 x3(t) minus y3(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa13(t)y3(t) x1(t) minus y1(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa13(t)y3(t) x1(t) minus y1(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa14(t)b14(t) + a14(t)y1(t)( 1113857 x4(t) minus y4(t)( 1113857
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857
minusa14(t)y4(t) x1(t) minus y1(t)( 1113857
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857
minus d1(t) u1(t) minus v1(t)( 1113857 +D1(t)x2(t)
x1(t)minus
y2(t)
y1(t)1113888 11138891113891
+ sgn x2(t) minus y2(t)1113864 1113865 minus a22(t) x2(t) minus y2(t)( 11138571113858
+D2(t)x1(t)
x2(t)minus
y1(t)
y2(t)1113888 11138891113891
le minus a11(t) minusa13(t)y3(t)
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 11138571113888
minusa14(t)y4(t)
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 11138571113889
times x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868 minus a22(t) x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868
+a13(t)b13(t) + a13(t)y1(t)
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+a14(t)b14(t) + a14(t)y1(t)
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+ d1(t) u1(t) minus v1(t)1113868111386811138681113868
1113868111386811138681113868 + 1113957D1(t) + 1113957D2(t)
(45)where
8 Journal of Mathematics
1113957D1(t)
D1(t)x2(t)
x1(t)minus
y2(t)
y1(t)1113888 1113889 x1(t)gty1(t)
D1(t)y2(t)
y1(t)minus
x2(t)
x1(t)1113888 1113889 x1(t)lty1(t)
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
1113957D2(t)
D2(t)x1(t)
x2(t)minus
y1(t)
y2(t)1113888 1113889 x2(t)gty2(t)
D2(t)y1(t)
y2(t)minus
x1(t)
x2(t)1113888 1113889 x2(t)lty2(t)
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
(46)
Next we discuss 1113957D1(t) under the following three cases
(a) If x1(t)gty1(t) then
1113957D1(t)leD1(t)
x1(t)x2(t) minus y2(t)( 1113857
leDm
1m1
x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868
(47)
(b) If x1(t)lty1(t) then
1113957D1(t)leD1(t)
y1(t)y2(t) minus x2(t)( 1113857le
Dm1
m1x2(t) minus y2(t)
11138681113868111386811138681113868111386811138681113868
(48)
(c) If x1(t) y1(t) the same conclusion as (a) and (b)holds
Combining the conclusions in (a)ndash(c) we have
1113957D1(t)leDm
1m1
x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868 (49)
A similar argument shows that
1113957D2(t)leDm
2 (t)
mlsquo2x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868 (50)
By means of (45)ndash(50) we have
1113944
2
i1D+Vi(t)le minus a
l11 minus
am13M3
bl13 +m1( 1113857
2 minusam14M4
bl14 +m1( 1113857
2 minusDm
2m2
⎛⎝ ⎞⎠
times x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868 minus al22 minus
Dm1
m11113888 1113889 x2(t) minus y2(t)
11138681113868111386811138681113868111386811138681113868
+am13b
m13 + am
13M1
bl13 +m1( 1113857
2 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am14b
m14 + am
14M1
bl14 +m1( 1113857
2 x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868
+ dm1 u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868
(51)
Define
V31(t) lnx3(t) minus lny3(t)1113868111386811138681113868
1113868111386811138681113868 (52)
Calculating the upper right derivative of V31(t) along thesolution of system (2) it follows thatD+V31(t) sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3 t minus τ1( 1113857(1113858
minus y3 t minus τ1( 11138571113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ d2(t) u2(t) minus v2(t)( 11138571113859
sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3(t) minus y3(t)( 11138571113858
+ d2(t) u2(t) minus v2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+a33(t)1113946t
tminus τ1_x3(θ) minus _y3(θ)( 1113857dθ1113891
sgn x3(t) minus y3(t)1113864 1113865minus a33(t) x3(t) minus y3(t)( 11138571113859
+ d2(t) u2(t) minus v2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ a33(t)1113946t
tminus τ1x3(θ)1113890 minus r3(θ) minus a33(θ)x3 θ minus τ1( 11138571113888
+a31(θ)x1 θ minus τ2( 1113857
b13(θ) + x1 θ minus τ2( 1113857+ d2(θ)u2(θ)1113891
minus y3(θ)1113890 minus r3(θ) minus a33(θ)y3 θ minus τ1( 1113857
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)11138911113889dθ1113891
sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3(t) minus y3(t)( 11138571113858
+ d2(t) u2(t) minus y2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ a33(t)1113946t
tminus τ1x3(θ) minus y3(θ)( 1113857(
times 1113890 minus r3(θ) minus a33(θ)y3 θ minus τ1( 1113857
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
Journal of Mathematics 9
+ x3(θ)1113890 minus a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 1113857( 1113857
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857( 1113857
+ d2(θ) u2(θ) minus v2(θ)( 111385711138591113857dθ⎤⎦
le minus a33(t) x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 + d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ a33(t)1113946t
tminus τ11113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891 x3(θ) minus y3(θ)
11138681113868111386811138681113868111386811138681113868
+ x3(θ) a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+ d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(53)
Define
V32(t) 1113946t
tminus τ11113946
t
sa33 s + τ1( 1113857 1113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
times x3(θ) minus y3(θ)1113868111386811138681113868
1113868111386811138681113868
+ x3(θ)1113890a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
1113868111386811138681113868⎤⎦⎞⎠dθ ds
(54)
From (53) and (54) we have
1113944
2
i1D+V3i(t)le minus a33(t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+ d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ1a33 s + τ1( 1113857ds1113890r3(t) + a33(t)y3 t minus τ1( 1113857
+a31(t)y1 t minus τ2( 1113857
b13(t) + y1 t minus τ2( 1113857+ d2(t)v2(t)1113891
times x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 +M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
times a33(t) x3 t minus τ1( 1113857 minus y3 t minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
timesa31(t)
b13(t) + x1 t minus τ2( 1113857x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds times d2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(55)
We also define
V33(t) 1113946t
tminus τ2
a31 w + τ2( 1113857b13 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)( 1113857 b13 w + τ2( 1113857 + y1(w)( 1113857
timesx1(w) minus y1(w)|dw
+M3 1113946t
tminus τ11113946
w+τ1
wa33 s + τ1( 1113857a33 w + τ1( 1113857
times x3(w) minus y3(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M3 1113946t
tminus τ21113946
w+τ2
w+τ2minus τ1a33 s + τ1( 1113857
a31 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(56)
10 Journal of Mathematics
and let
V3(t) V31(t) + V32(t) + V33(t) (57)
According to (55) and (56) calculating the upper rightderivative of V3(t) we have
D+V3(t)le minus a
l33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+dm2 N21113889 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds
minus M3am33 1113946
t+τ1
ta
m33 s + τ1( 1113857ds1113891 x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3am31
bl13 +m1
⎡⎣
times1113946t+τ2
t+τ2minus τ1a
m33 s + τ1( 1113857ds1113891 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm2 +M3d
m2 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds1113890 1113891
times u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
le minus al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+ dm2 N21113857a
m33τ1 minus M3 a
m33( 1113857
2τ11113961 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3a
m31a
m33τ1
bl13 +m1
⎛⎝ ⎞⎠ x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868
+ dm2 +M3d
m2 a
m33τ1( 1113857 u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(58)
Similarly we define
V41(t) lnx4(t) minus lny4(t)1113868111386811138681113868
1113868111386811138681113868 (59)
Calculating the upper right derivative of V41(t) along thesolution of system (2) we get
D+V41(t) sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4 t minus τ3( 1113857(1113858
minus y4 t minus τ3( 11138571113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+d3(t) u3(t) minus v3(t)( 11138571113859
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+a44(t)1113946t
tminus τ3_x4(θ) minus _y4(θ)( 1113857dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus r4(θ) minus a44(θ)x4 θ minus τ3( 11138571113858(
+a41(θ)x1 θ minus τ4( 1113857
b14(θ) + x1 θ minus τ4( 1113857+ d3(θ)u3(θ)1113891
minus y4(θ) minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)11138911113889dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t) minus y4(t)( 11138571113858
+ d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus y4(θ)( 1113857
times minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)1113891
+ x4(θ) minus a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 1113857( 11138571113858
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857( 1113857
+d3(θ) u3(θ) minus v3(θ)( 111385711138591113857dθ1113859
le minus a44(t) x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 + d3(t) u3(t) minus v3(t)1113868111386811138681113868
1113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ a44(t)1113946t
tminus τ3r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+ d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(60)
Journal of Mathematics 11
We define
V42(t) 1113946t
tminus τ31113946
t
sa44 s + τ3( 1113857 r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ ds
(61)
By (60) and (61) we have
1113944
2
i1D+V4i(t)le minus a44(t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868 + d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ3a44 s + τ3( 1113857ds times 1113890r4(t) + a44(t)y4 t minus τ3( 1113857
+a41(t)y1 t minus τ4( 1113857
b14(t) + y1 t minus τ4( 1113857+ d3(t)v3(t)1113891
times x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 +M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
times a44(t) x4 t minus τ3( 1113857 minus y4 t minus τ3( 11138571113868111386811138681113868
1113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
timesa41(t)
b14(t) + x1 t minus τ4( 1113857x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds times d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(62)
Let
V4(t) V41(t) + V42(t) + V43(t) (63)
where
V43(t) 1113946t
tminus τ4
a41 w + τ4( 1113857b14 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)( 1113857 b14 w + τ4( 1113857 + y1(w)( 1113857
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868dw
+M4 1113946t
tminus τ31113946
w+τ3
wa44 s + τ3( 1113857a44 w + τ3( 1113857
times x4(w) minus y4(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M4 1113946t
tminus τ41113946
w+τ4
w+τ4minus τ3a44 s + τ3( 1113857
a41 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(64)
By (62) and (64) we have
D+V4(t)le minus a
l44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113890 11138911113888
times 1113946t
tminus τ3a
m44 s + τ3( 1113857ds
minus M4am44 1113946
t+τ3
ta
m44 s + τ3( 1113857ds1113889 x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+am41b
m14
bl14 +m1( 1113857
2 +M4am41
bl14 +m1
⎛⎝
times1113946t+τ4
t+τ4 minus τ3a
m44 s + τ3( 1113857ds1113889 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm3 +M4d
m3 1113946
t
tminus τ3a
m44 s + τ3( 1113857ds1113888 1113889 u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(65)
Moreover define V5(t) V6(t) andV7(t) by
V5(t) ln u1(t) minus ln v1(t)1113868111386811138681113868
1113868111386811138681113868
V6(t) ln u2(t) minus ln v2(t)1113868111386811138681113868
1113868111386811138681113868
V7(t) ln u3(t) minus ln v3(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
(66)
Calculating the upper right derivative of V5(t) V6(t)and V7(t) along the solutions of system (2) it holds that
D+V5(t)le sgn u1(t) minus v1(t)( 1113857 minus f1(t) u1(t)(1113858
minus v1(t)1113857 + q1(t) x1(t) minus y1(t)( 11138571113859
le minus fl1(t) u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868 + q
m1 (t) x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
(67)
D+V6(t)le sgn u2(t) minus v2(t)( 1113857 minus f2(t) u2(t)(1113858
minus v2(t)1113857 minus q2(t) x3(t) minus y3(t)( 11138571113859
le minus fl2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
+ qm2 (t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
(68)
12 Journal of Mathematics
D+V7(t)le sgn u3(t) minus v3(t)( 1113857 minus f3(t) u3(t)(1113858
minus v3(t)1113857 minus q3(t) x4(t) minus y4(t)( 11138571113859
le minus fl3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+ qm3 (t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
(69)
Finally we define a Lyapunov function as follows
V(t) 11139447
i1Vi(t) (70)
From (51) (58) (65) and (67)ndash(69) we can get that forall tgeT + τ
D+V(t)le minus 1113944
4
i1Ai xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 minus 1113944
3
j1Bj uj(t) minus vj(t)
11138681113868111386811138681113868
11138681113868111386811138681113868
(71)
In view of conditions (H9) of eorem 2 there exists aconstant αgt 0 and Tlowast gtT + τ such that for all tgeTlowast it holdsthat
Ai ge αgt 0
Bj ge αgt 0
i 1 2 3 4 j 1 2 3
(72)
Integrating fromTlowast to t on both sides of (71) and by (72)we have
V(t) + α1113946t
Tlowast1113944
4
i1xi(s) minus yi(s)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(s) minus vj(s)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠ds
leV Tlowast
( 1113857lt +infin
(73)
erefore V(t) is bounded on [Tlowast+infin) and we have
1113946infin
Tlowast1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠dsleV(T)
αlt +infin
(74)
By (74) we also have
1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113874 1113875 isin L1(T+infin)
(75)
Applying eorem 1 we can obtain that |xi(t) minus yi(t)||uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 and their derivativesremain bounded on [Tlowast+infin) and |xi(t) minus yi(t)| and|uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 are uniformly con-tinuous on [Tlowast+infin) By Lemma 5 we can conclude that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0 i 1 2 3 4
limt⟶+infin
uj(t) minus vj(t)11138681113868111386811138681113868
11138681113868111386811138681113868 0 j 1 2 3(76)
is completes the proof and the solution of system (2)is globally attractive
Remark 3 From the result ofeorem 2 the feedback controlitems and delays have influence on the globally attractive of
system (2) namely the population densities for the system willapproach to a positive equilibrium when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H9)
Remark 4 It should not be difficult to see that the methodand skills of constructing a suitable Lyapunov function in thepaper are very different with those of [29] and the method ofconstructing Lyapunov function in [29] cannot be used inthis manuscript
4 Periodic Solution
Assuming that coefficients of system (2) are positive con-tinuous and ω minus periodic functions then system (2) ischanged to the ω minus periodic system In this section we shallobtain conditions for the existence uniqueness and stabilityof a positive periodic for system (2) by using the fixed-pointtheory and some new analysis method For convenience wegive firstly the following lemma
Lemma 6 (see [34]) Let S sub Rn be convex and compact Ifmapping T S⟶ S is continuous then there exists a fixedpoint ie there exists xlowast isin S such that T(xlowast) xlowast
Next we state and prove our main result with respect tothe periodic solution for system (2)
Theorem 3 Assume that system (2) is a ω-periodic systemand satisfies conditions (H1) minus (H9) then system (2) has apositive unique ω-periodic solution which is globally as-ymptotically stable
Proof According to the existence and uniqueness theorem ofsolutions of functional differential equations [35ndash38] we candefine a Poincare mapping T R7
+⟶ R7+ as follows
T X0( 1113857 X tω X0( 1113857 (77)
where X(tω X0) (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)) be a positive solution of system (2) with initialconditions (7) And define
S x1 x2 x3 x4 u1 u2 u3( 1113857 isin R7+
mi lexi leMi i 1 2 3 4
nj le uj leNj j 1 2 3
111386811138681113868111386811138681113868111386811138681113868
⎧⎨
⎩
⎫⎬
⎭
(78)
en it is obvious that S sub R7+ is a convex and compact set
By eorem 1 and the continuity of solution of system (2)with respect to initial conditions (7) the mappingT S⟶ S is continuous Furthermore it is not difficult toshow that system (2) has a positive unique ω minus periodicsolution which is globally asymptotic stability by usingLemma 6 and eorem 2
Remark 5 From the result of eorem 3 the feedbackcontrol items and delays have influence on the periodic ofω minus periodic system (2) at is the population densities forthe periodic system will tend to a positive ω minus periodicequilibrium when system (2) satisfies ω minus periodic initialconditions (7) and assumptions (H1) minus (H9)
Journal of Mathematics 13
5 Numerical Simulation
In this section we give some numerical simulations to illustratethe feasibility of our main results In order to facilitate theverification of eorem 3 where the system is a periodicsystem we select the periodic function as the coefficient ofsystem (2) and consider the following multidelay periodicpredator-prey model with feedback control and prey diffusion
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)minus
(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
minus (0015 + 0005 sin πt)u1(t)1113859
+(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t) (25 + 05 sin πt) minus (225 + 025 cos πt)x21113858 1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)[minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857
+(05 + 01 sin πt)u2(t)1113859
_x4(t) x4(t)[minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857
+(045 + 005 sin πt)u3(t)1113859
_u1(t) (15 + 05 cos πt) minus (16 + 04 sin πt)u1(t)
+(015 + 005 sin πt)x1(t)
_u2(t) (2 + 05 cos πt) minus (105 + 005 sin πt)u2(t)
minus (15 + 05 sin πt)x3(t)
_u3(t) (355 + 005 cos πt) minus (345 + 045 sin πt)u3(t)
minus (225 + 025 sin πt)x4(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(79)
where time delay τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 1 t isin [minus 004 0]
x2(0) 1
x3(t) sin t + 1 t isin [minus 001 0]
x4(t) sin t + 1 t isin [minus 003 0]
ui(0) 1 (i 1 2 3)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(80)
From the conditions of eorem 3 we select somespecific parameter values shown in models (79) and (80)according to the calculation Of course the choiceof parameters in the model is not unique It is not difficultto verify that system (79) satisfies the conditions of eorems1ndash3 It holds from eorems 1 and 2 that system (79) ispermanent and globally attractive By means of eorem 3system (79) has a positive unique periodic solution which isglobally asymptotic stability By using the software packageMATLAB 71 we can solve the numerical solutions of systems(79) and (80) as shown in Figures 1ndash3 Figure 1 shows that thepermanence of system (79) with initial conditions (80) andtime delay τ1 001 τ2 002 τ3 003 and τ4 004 Itis not difficult to see from Figure 2 that system (79) isglobally attractive Figure 3 shows the dynamic behavior ofsystem (79)
In general ecosystems represented by deterministicLotkandashVolterra models are not suitable for describing thereal behavior of population dynamics e feedbackcontrol variable we described above is strictly related tothe environmental noise effect It is well known that theenvironmental noise is a very important factor in mod-eling natural phenomena in ecological systems At pres-ent it is impossible to model population dynamicswithout considering the interaction between the ecolog-ical system and environmental noise always present innature In fact the environmental noise acts construc-tively producing counterintuitive effects and interestingnoise-induced phenomena such as stochastic resonancenoise-enhanced stability and resonant activation (cf[39ndash43]) In addition the study of nonlinear dynamicalsystems with external noise has found some counterin-tuitive phenomena that play a constructive role in noiseand are highly fundamental and practical interests inmany scientific fields (cf [44ndash47]) e presence of noisesources can alter the stability of the ecosystem (cf[48ndash51]) In addition this noise in general breaks thesymmetry of the ecosystem see for example [52] andmoreover it gives rise to extinction phenomena becausethe multiplicative noise has the effect of an absorbingbarrier see for example [53]
As a response to this we consider the following cor-responding stochastic predator-prey model with the mul-tiplicative noise sources
14 Journal of Mathematics
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)
minus(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
+Dξ1(t)1113859 +(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t)[(25 + 05 sin πt)
minus (225 + 025 cos πt)x2(t)1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)1113890 minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857+Dξ2(t)1113891
_x4(t) x4(t)1113890 minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857+Dξ3(t)1113891
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(81)
where ξi(t) are δ-correlated Gaussian white noise sourceswith zero mean that is langδi(t)rang 0 andlangδi(t)δi(tprime)rang Diδ(t minus tprime)δij with Di the noise intensities(here we choose all equal noise intensities that is Di D)and time delays τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 05 t isin [minus 004 0]
x2(0) 05
x3(t) sin t + 05 t isin [minus 001 0]
x4(t) sin t + 05 t isin [minus 003 0]
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(82)
x1(t)x2(t)
x3(t)x4(t)
04
05
06
07
08
09
1
11
12
13
5 10 15 20 25 30 35 40 45 500t
(a)
u1(t)u2(t)u3(t)
07
08
09
1
11
12
13
14
15
16
5 10 15 20 25 30 35 40 45 500t
(b)
Figure 1 e numerical solution of system (79) with initial condition (60) (80)
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
16
2 4 6 8 10 12 14 16 18 200t
Figure 2 Numerical solution of system (79) with different initialconditions
Journal of Mathematics 15
0
02
04
06
08
1
12
14
16x 3
(t)
02 04 06 08 1 12 14 160x2(t)
(a)
1
15
2
25
x 2(t)
05 1 15 2 250x1(t)
(b)
02
04
06
08
1
12
14
16
18
2
22
x 3(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(c)
0
02
04
06
08
1
12
14
16
x 4(t)
04 06 08 1 12 14 160 02x2(t)
(d)
02
04
06
08
1
12
14
16
18
2
x 4(t)
04 06 08 1 12 14 16 18 202x3(t)
(e)
02
04
06
08
1
12
14
16
18
2
22
x 4(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(f )
Figure 3 Continued
16 Journal of Mathematics
005
115
2
005
115
2
x2(t)x3 (t)
0
05
1
15
2
x 4(t)
(g)
051
152
25
115
225
x1(t)x2 (t)
0
05
1
15
2
25
x 3(t)
(h)
051
152
25
115
2250
05
1
15
2
25
x 4(t)
x1(t)x2 (t)
(i)
x1(t)x3 (t)
051
152
005
115
20
05
1
15
2
x 4(t)
(j)
Figure 3 Dynamic behavior of system (79)
D = 0005
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(a)
D = 001
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(b)
Figure 4 Continued
Journal of Mathematics 17
D = 002
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(c)
x1(t)x2(t)
x3(t)x4(t)
D = 004
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(d)
Figure 4 e numerical solutions of systems (81) and (82) with very low noise intensities
D = 01
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(a)
D = 02
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(b)
Figure 5 Continued
18 Journal of Mathematics
D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

D+W1(t) _x1(t)le a
l11W1(t)
rm1
al11minus W1(t)1113890 1113891le minus αlt 0
(15)
Similarly if (b) holds there exists εgt 0 t isin [0 ε) andW1(t) x2(t)gtM1 to derive
D+W1(t) _x2(t)le a
l22W1(t)
rm2
al22minus W1(t)1113890 1113891le minus αlt 0
(16)
Moreover in case (c) we also have
D+W1(t) _xi(t)le a
liiW1(t)
rmi
alii
minus W1(t)1113890 1113891le minus αlt 0 i 1 or 2
(17)
From what we have discussed above it yields that ifW1(0)gtM1 then W1(t) is strictly monotone decreasingwith speed at least α so there exists T1 gt 0 such that for anytime tgeT1 W1(t) max x1(t) x2(t)1113864 1113865leM1 which admits
lim supt⟶+infin
x1(t)leM1 M2 maxrm1
al11
rm2
al22
1113896 1113897 (18)
lim supt⟶+infin
x2(t)leM1 M2 maxrm1
al11
rm2
al22
1113896 1113897 (19)
According to the fifth equation of system (2) we have
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)le em1 minus f
l1u1(t) + q
m1 M1
(20)
Using Lemma 1 we can deduce
lim supt⟶+infin
u1(t)leem1 + qm
1 M1
fl1
N1 (21)
Similarly in light of the last two equations of system (26)we then have
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
le e2(t) minus f2(t)u2(t)le em2 minus f
l2u2(t)
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
le e3(t) minus f3(t)u3(t)le em3 minus f
l3u3(t)
(22)
By utilizing Lemma 1 again we can get
lim supt⟶+infin
u2(t)leem2
fl2 N2 (23)
lim supt⟶+infin
u3(t)leem3
fl3 N3 (24)
From the third and fourth equations of system (2) wehave
_x3(t) x3(t)1113890 minus r3(t) minus a33(t)x3 t minus τ1( 1113857
+a31(t)x1 t minus τ2( 1113857
b13(t) + x1 t minus τ2( 1113857+ d2(t)u2(t)1113891
lex3(t) minus rl3 minus a
l33x3 t minus τ1( 1113857 +
am31M1
bl13 +M1
+ dm2 N21113890 1113891
_x4(t) x4(t)1113890 minus r4(t) minus a44(t)x4 t minus τ3( 1113857
+a41(t)x1 t minus τ4( 1113857
b14(t) + x1 t minus τ4( 1113857+ d3(t)u3(t)1113891
lex4(t) minus rl4 minus a
l44x4 t minus τ3( 1113857 +
am41M1
bl14 +M1
+ dm3 N31113890 1113891
(25)
By Lemma 3 combining with (H1) and (H2) we have
lim supt⟶+infin
x3(t)leam31M1 bl
13 +M1( 1113857 + dm2 N2 minus rl
3
al33
times expam31M1
bl13 +M1
dm2 N2 minus r
l31113888 1113889τ11113890 1113891
M3
(26)
lim supt⟶+infin
x4(t)leam41M1 bl
14 +M1( 1113857 + dm3 N3 minus rl
4
al44
times expam41M1
bl14 +M1
+ dm3 N3 minus r
l41113888 1113889τ31113890 1113891
M4
(27)
On the contrary from the first equation of system (2) itfollows that
_x1(t) x1(t) r1(t) minus a11(t)x1(t)1113858
minusa13(t)x3(t)
b13(t) + x1(t)minus
a14(t)x4(t)
b14(t) + x1(t)
minus d1(t)u1(t)1113859 +D1(t) x2(t) minus x1(t)( 1113857
gex1(t) r1(t) minus a11(t)x1(t) minusa13(t)x3(t)
b13(t)1113890
minusa14(t)x4(t)
b14(t)minus d1(t)u1(t) minus D1(t)1113891
gex1(t) rl1 minus a
m11x1(t) minus
am13M3
bl13
minusam14M4
bl14
minus dm1 N1 minus D
m11113890 1113891
(28)
By Lemma 2 and assumption (H3) we have
6 Journal of Mathematics
lim inft⟶+infin
x1(t)gerl1
am11minus
am13M3
bl13a
m11minus
am14M4
bl14a
m11
minusdm1 N1
am11
minusDm
1am11
m1
(29)
For the second equation of system (2) it holds that
_x2(t) x2(t) r2(t) minus a22(t)x2(t)1113858 1113859
+D2(t) x1(t) minus x2(t)( 1113857
gex2(t) r2(t) minus a22(t)x2(t) minus D2(t)1113858 1113859
gex2(t) rl2 minus a
m22x2(t) minus D
m21113960 1113961
(30)
From assumption (H4) and by Lemma 2 we can get
lim inft⟶+infin
x2(t)gerl2 minus Dm
2am22
m2 (31)
For the fifth equation of system (2) we have
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)
ge el1 minus f
m1 u1(t) + q
l1m1
(32)
By Lemma 1 it holds that
lim inft⟶+infin
u1(t)geel1 + ql
1m1
fm1
n1 (33)
For the sixth and the seventh equations of system (2) wecan obtain
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
ge el2 minus f
m2 u2(t) minus q
m2 M3
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
ge el3 minus f
m3 u3(t) minus q
m3 M4
(34)
By Lemma 1 (H5) and (H6) we have
lim inft⟶+infin
u2(t)geel2 minus qm
2 M3
fm2
n2 (35)
lim inft⟶+infin
u3(t)geel3 minus qm
3 M4
fm3
n3 (36)
According to the third and the fourth equations ofsystem (2) we have
_x3(t) x3(t)1113890 minus r3(t) minus a33(t)x3 t minus τ1( 1113857
+a31(t)x1 t minus τ2( 1113857
b13(t) + x1 t minus τ2( 1113857+ d2(t)u2(t)
ge x3(t) minus rm3 minus a
m33x3 t minus τ1( 1113857 +
al31m1
bm13 +m1
+ dl2n21113890 1113891
_x4(t) x4(t)1113890 minus r4(t) minus a44(t)x4 t minus τ3( 1113857
+a41(t)x1 t minus τ4( 1113857
b14(t) + x1 t minus τ4( 1113857+ d3(t)u3(t)1113891
ge x4(t)1113890 minus rm4 minus a
m44x4 t minus τ3( 1113857
+al41m1
bm14 +m1
+ dl3n31113891
(37)
Using Lemma 4 (H7) and (H8) we also derive that
lim inft⟶+infin
x3(t)geal31m1( 1113857 bm
13 +m1( 1113857 + dl2n2 minus rm
3am33
times expal31m1
bm13 +m1
+ dl2n2 minus r
m3 minus a
m33M31113888 1113889τ11113890 1113891
m3
(38)
lim inft⟶+infin
x4(t)geal41m1( 1113857 bm
14 +m1( 1113857 + dl3n3 minus rm
4am44
times expal41m1
bm14 +m1
+ dl3n3 minus r
m4 minus a
m44M41113888 11138891113890 1113891τ3
m4
(39)
Summarizing (18)ndash(39) we complete the induction ofeorem 1
Remark 2 It is obvious that the proof method for Lemma21 in [29] is the differential inequality theory while that ofthis article is the delay differential inequality theory Fromthe result of eorem 1 the feedback control items anddelays have influence on the permanence of system (2) Inother words the densities of the prey and predator pop-ulations are uniformly bounded when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H8)
3 Global Attractivity
In this section the global attractivity of system (2) will bestudied To get the sufficient conditions for global attractivity ofsystem (2) we firstly give the following definition and Lemma
Journal of Mathematics 7
Definition 2 System (2) is said to be globally attractive ifthere exists a positive solution
X(t) x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)( 1113857
(40)
of system (2) such that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0
limt⟶+infin
ui(t) minus vi(t)1113868111386811138681113868
1113868111386811138681113868 0
i 1 2 3 4 j 1 2 3
(41)
for any other positive solutionY(t) (y1(t) y2(t) y3(t) y4(t) v1(t) v2(t) v3(t)) of sys-tem (2)
Lemma 5 (see [33]) If the function f(t) R+⟶ R isuniformly continuous and the limit limt⟶+infin 1113938
t
0 f(s)ds existsand is finite then limt⟶+infinf(t) 0
Next we state and prove our main result with respect tothe global attractivity for system (2)
Theorem 2 Assume that system (2) satisfies (H1)minus (H8) andthe following conditions
(H9) Ai gt 0 Bj gt 0 (i 1 2 3 4 j 1 2 3) where
B1 fl1 minus d
m1
B2 fl2 minus d
m2 minus M3d
m2 a
m33τ1
B3 fl3 minus d
m3 minus M4d
m3 a
m44τ3
A1 al11 minus
am13M3
bl13 +m1( 1113857
2 minusam14M4
bl14 +m1( 1113857
2 minusDm
2m2
minusam31b
m13
bl13 +m1( 1113857
2
minusM3a
m31a
m33τ1
bl13 +m1
minusam41b
m14
bl14 +m1( 1113857
2 minusM4a
m41a
m44τ3
bl14 +m1
minus qm1
A2 al22 minus Dm
1m1
A3 al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
+ dm2 N21113888 1113889a
m33τ1
minus M3 am33( 1113857
2τ1 minusam13b
m13 + am
13M1
bl13 +m1( 1113857
2 minus qm2
A4 al44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113888 1113889a
m44τ3
minus M4 am44( 1113857
2τ3 minusam14b
m14 + am
14M1
bl14 +m1( 1113857
2 minus qm3
(42)
-en system (2) is globally attractive
Proof Suppose that (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t)
u3(t)) and (y1(t) y2(t) y3(t) y4(t) v1(t) v2(t) v3(t)) areany two different positive solutions of system (2)en from
eorem 1 there exist positive constants Mi mi Njnj(i 1 2 3 4 j 1 2 3) and T such that
mi lexi(t) yi(t)leMi i 1 2 3 4
nj le uj(t) vj(t)leNj j 1 2 3(43)
We defineV1(t) lnx1(t) minus lny1(t)
11138681113868111386811138681113868111386811138681113868
V2(t) lnx2(t) minus lny2(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎨
⎩ (44)
Calculating the upper-right derivative of V1(t) andV2(t) along the solution of system (2) we have
1113944
2
i1D+Vi(T) 1113944
2
i1D+ lnxi(t) minus lnyi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961
le sgn x1(t) minus y1(t)1113864 11138651113890 minus a11(t) x1(t) minus y1(t)( 1113857
minusa13(t)b13(t) + a13(t)y1(t)( 1113857 x3(t) minus y3(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa13(t)y3(t) x1(t) minus y1(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa13(t)y3(t) x1(t) minus y1(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa14(t)b14(t) + a14(t)y1(t)( 1113857 x4(t) minus y4(t)( 1113857
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857
minusa14(t)y4(t) x1(t) minus y1(t)( 1113857
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857
minus d1(t) u1(t) minus v1(t)( 1113857 +D1(t)x2(t)
x1(t)minus
y2(t)
y1(t)1113888 11138891113891
+ sgn x2(t) minus y2(t)1113864 1113865 minus a22(t) x2(t) minus y2(t)( 11138571113858
+D2(t)x1(t)
x2(t)minus
y1(t)
y2(t)1113888 11138891113891
le minus a11(t) minusa13(t)y3(t)
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 11138571113888
minusa14(t)y4(t)
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 11138571113889
times x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868 minus a22(t) x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868
+a13(t)b13(t) + a13(t)y1(t)
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+a14(t)b14(t) + a14(t)y1(t)
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+ d1(t) u1(t) minus v1(t)1113868111386811138681113868
1113868111386811138681113868 + 1113957D1(t) + 1113957D2(t)
(45)where
8 Journal of Mathematics
1113957D1(t)
D1(t)x2(t)
x1(t)minus
y2(t)
y1(t)1113888 1113889 x1(t)gty1(t)
D1(t)y2(t)
y1(t)minus
x2(t)
x1(t)1113888 1113889 x1(t)lty1(t)
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
1113957D2(t)
D2(t)x1(t)
x2(t)minus
y1(t)
y2(t)1113888 1113889 x2(t)gty2(t)
D2(t)y1(t)
y2(t)minus
x1(t)
x2(t)1113888 1113889 x2(t)lty2(t)
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
(46)
Next we discuss 1113957D1(t) under the following three cases
(a) If x1(t)gty1(t) then
1113957D1(t)leD1(t)
x1(t)x2(t) minus y2(t)( 1113857
leDm
1m1
x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868
(47)
(b) If x1(t)lty1(t) then
1113957D1(t)leD1(t)
y1(t)y2(t) minus x2(t)( 1113857le
Dm1
m1x2(t) minus y2(t)
11138681113868111386811138681113868111386811138681113868
(48)
(c) If x1(t) y1(t) the same conclusion as (a) and (b)holds
Combining the conclusions in (a)ndash(c) we have
1113957D1(t)leDm
1m1
x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868 (49)
A similar argument shows that
1113957D2(t)leDm
2 (t)
mlsquo2x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868 (50)
By means of (45)ndash(50) we have
1113944
2
i1D+Vi(t)le minus a
l11 minus
am13M3
bl13 +m1( 1113857
2 minusam14M4
bl14 +m1( 1113857
2 minusDm
2m2
⎛⎝ ⎞⎠
times x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868 minus al22 minus
Dm1
m11113888 1113889 x2(t) minus y2(t)
11138681113868111386811138681113868111386811138681113868
+am13b
m13 + am
13M1
bl13 +m1( 1113857
2 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am14b
m14 + am
14M1
bl14 +m1( 1113857
2 x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868
+ dm1 u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868
(51)
Define
V31(t) lnx3(t) minus lny3(t)1113868111386811138681113868
1113868111386811138681113868 (52)
Calculating the upper right derivative of V31(t) along thesolution of system (2) it follows thatD+V31(t) sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3 t minus τ1( 1113857(1113858
minus y3 t minus τ1( 11138571113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ d2(t) u2(t) minus v2(t)( 11138571113859
sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3(t) minus y3(t)( 11138571113858
+ d2(t) u2(t) minus v2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+a33(t)1113946t
tminus τ1_x3(θ) minus _y3(θ)( 1113857dθ1113891
sgn x3(t) minus y3(t)1113864 1113865minus a33(t) x3(t) minus y3(t)( 11138571113859
+ d2(t) u2(t) minus v2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ a33(t)1113946t
tminus τ1x3(θ)1113890 minus r3(θ) minus a33(θ)x3 θ minus τ1( 11138571113888
+a31(θ)x1 θ minus τ2( 1113857
b13(θ) + x1 θ minus τ2( 1113857+ d2(θ)u2(θ)1113891
minus y3(θ)1113890 minus r3(θ) minus a33(θ)y3 θ minus τ1( 1113857
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)11138911113889dθ1113891
sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3(t) minus y3(t)( 11138571113858
+ d2(t) u2(t) minus y2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ a33(t)1113946t
tminus τ1x3(θ) minus y3(θ)( 1113857(
times 1113890 minus r3(θ) minus a33(θ)y3 θ minus τ1( 1113857
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
Journal of Mathematics 9
+ x3(θ)1113890 minus a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 1113857( 1113857
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857( 1113857
+ d2(θ) u2(θ) minus v2(θ)( 111385711138591113857dθ⎤⎦
le minus a33(t) x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 + d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ a33(t)1113946t
tminus τ11113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891 x3(θ) minus y3(θ)
11138681113868111386811138681113868111386811138681113868
+ x3(θ) a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+ d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(53)
Define
V32(t) 1113946t
tminus τ11113946
t
sa33 s + τ1( 1113857 1113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
times x3(θ) minus y3(θ)1113868111386811138681113868
1113868111386811138681113868
+ x3(θ)1113890a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
1113868111386811138681113868⎤⎦⎞⎠dθ ds
(54)
From (53) and (54) we have
1113944
2
i1D+V3i(t)le minus a33(t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+ d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ1a33 s + τ1( 1113857ds1113890r3(t) + a33(t)y3 t minus τ1( 1113857
+a31(t)y1 t minus τ2( 1113857
b13(t) + y1 t minus τ2( 1113857+ d2(t)v2(t)1113891
times x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 +M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
times a33(t) x3 t minus τ1( 1113857 minus y3 t minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
timesa31(t)
b13(t) + x1 t minus τ2( 1113857x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds times d2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(55)
We also define
V33(t) 1113946t
tminus τ2
a31 w + τ2( 1113857b13 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)( 1113857 b13 w + τ2( 1113857 + y1(w)( 1113857
timesx1(w) minus y1(w)|dw
+M3 1113946t
tminus τ11113946
w+τ1
wa33 s + τ1( 1113857a33 w + τ1( 1113857
times x3(w) minus y3(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M3 1113946t
tminus τ21113946
w+τ2
w+τ2minus τ1a33 s + τ1( 1113857
a31 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(56)
10 Journal of Mathematics
and let
V3(t) V31(t) + V32(t) + V33(t) (57)
According to (55) and (56) calculating the upper rightderivative of V3(t) we have
D+V3(t)le minus a
l33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+dm2 N21113889 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds
minus M3am33 1113946
t+τ1
ta
m33 s + τ1( 1113857ds1113891 x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3am31
bl13 +m1
⎡⎣
times1113946t+τ2
t+τ2minus τ1a
m33 s + τ1( 1113857ds1113891 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm2 +M3d
m2 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds1113890 1113891
times u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
le minus al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+ dm2 N21113857a
m33τ1 minus M3 a
m33( 1113857
2τ11113961 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3a
m31a
m33τ1
bl13 +m1
⎛⎝ ⎞⎠ x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868
+ dm2 +M3d
m2 a
m33τ1( 1113857 u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(58)
Similarly we define
V41(t) lnx4(t) minus lny4(t)1113868111386811138681113868
1113868111386811138681113868 (59)
Calculating the upper right derivative of V41(t) along thesolution of system (2) we get
D+V41(t) sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4 t minus τ3( 1113857(1113858
minus y4 t minus τ3( 11138571113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+d3(t) u3(t) minus v3(t)( 11138571113859
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+a44(t)1113946t
tminus τ3_x4(θ) minus _y4(θ)( 1113857dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus r4(θ) minus a44(θ)x4 θ minus τ3( 11138571113858(
+a41(θ)x1 θ minus τ4( 1113857
b14(θ) + x1 θ minus τ4( 1113857+ d3(θ)u3(θ)1113891
minus y4(θ) minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)11138911113889dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t) minus y4(t)( 11138571113858
+ d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus y4(θ)( 1113857
times minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)1113891
+ x4(θ) minus a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 1113857( 11138571113858
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857( 1113857
+d3(θ) u3(θ) minus v3(θ)( 111385711138591113857dθ1113859
le minus a44(t) x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 + d3(t) u3(t) minus v3(t)1113868111386811138681113868
1113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ a44(t)1113946t
tminus τ3r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+ d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(60)
Journal of Mathematics 11
We define
V42(t) 1113946t
tminus τ31113946
t
sa44 s + τ3( 1113857 r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ ds
(61)
By (60) and (61) we have
1113944
2
i1D+V4i(t)le minus a44(t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868 + d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ3a44 s + τ3( 1113857ds times 1113890r4(t) + a44(t)y4 t minus τ3( 1113857
+a41(t)y1 t minus τ4( 1113857
b14(t) + y1 t minus τ4( 1113857+ d3(t)v3(t)1113891
times x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 +M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
times a44(t) x4 t minus τ3( 1113857 minus y4 t minus τ3( 11138571113868111386811138681113868
1113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
timesa41(t)
b14(t) + x1 t minus τ4( 1113857x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds times d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(62)
Let
V4(t) V41(t) + V42(t) + V43(t) (63)
where
V43(t) 1113946t
tminus τ4
a41 w + τ4( 1113857b14 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)( 1113857 b14 w + τ4( 1113857 + y1(w)( 1113857
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868dw
+M4 1113946t
tminus τ31113946
w+τ3
wa44 s + τ3( 1113857a44 w + τ3( 1113857
times x4(w) minus y4(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M4 1113946t
tminus τ41113946
w+τ4
w+τ4minus τ3a44 s + τ3( 1113857
a41 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(64)
By (62) and (64) we have
D+V4(t)le minus a
l44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113890 11138911113888
times 1113946t
tminus τ3a
m44 s + τ3( 1113857ds
minus M4am44 1113946
t+τ3
ta
m44 s + τ3( 1113857ds1113889 x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+am41b
m14
bl14 +m1( 1113857
2 +M4am41
bl14 +m1
⎛⎝
times1113946t+τ4
t+τ4 minus τ3a
m44 s + τ3( 1113857ds1113889 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm3 +M4d
m3 1113946
t
tminus τ3a
m44 s + τ3( 1113857ds1113888 1113889 u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(65)
Moreover define V5(t) V6(t) andV7(t) by
V5(t) ln u1(t) minus ln v1(t)1113868111386811138681113868
1113868111386811138681113868
V6(t) ln u2(t) minus ln v2(t)1113868111386811138681113868
1113868111386811138681113868
V7(t) ln u3(t) minus ln v3(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
(66)
Calculating the upper right derivative of V5(t) V6(t)and V7(t) along the solutions of system (2) it holds that
D+V5(t)le sgn u1(t) minus v1(t)( 1113857 minus f1(t) u1(t)(1113858
minus v1(t)1113857 + q1(t) x1(t) minus y1(t)( 11138571113859
le minus fl1(t) u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868 + q
m1 (t) x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
(67)
D+V6(t)le sgn u2(t) minus v2(t)( 1113857 minus f2(t) u2(t)(1113858
minus v2(t)1113857 minus q2(t) x3(t) minus y3(t)( 11138571113859
le minus fl2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
+ qm2 (t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
(68)
12 Journal of Mathematics
D+V7(t)le sgn u3(t) minus v3(t)( 1113857 minus f3(t) u3(t)(1113858
minus v3(t)1113857 minus q3(t) x4(t) minus y4(t)( 11138571113859
le minus fl3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+ qm3 (t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
(69)
Finally we define a Lyapunov function as follows
V(t) 11139447
i1Vi(t) (70)
From (51) (58) (65) and (67)ndash(69) we can get that forall tgeT + τ
D+V(t)le minus 1113944
4
i1Ai xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 minus 1113944
3
j1Bj uj(t) minus vj(t)
11138681113868111386811138681113868
11138681113868111386811138681113868
(71)
In view of conditions (H9) of eorem 2 there exists aconstant αgt 0 and Tlowast gtT + τ such that for all tgeTlowast it holdsthat
Ai ge αgt 0
Bj ge αgt 0
i 1 2 3 4 j 1 2 3
(72)
Integrating fromTlowast to t on both sides of (71) and by (72)we have
V(t) + α1113946t
Tlowast1113944
4
i1xi(s) minus yi(s)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(s) minus vj(s)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠ds
leV Tlowast
( 1113857lt +infin
(73)
erefore V(t) is bounded on [Tlowast+infin) and we have
1113946infin
Tlowast1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠dsleV(T)
αlt +infin
(74)
By (74) we also have
1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113874 1113875 isin L1(T+infin)
(75)
Applying eorem 1 we can obtain that |xi(t) minus yi(t)||uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 and their derivativesremain bounded on [Tlowast+infin) and |xi(t) minus yi(t)| and|uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 are uniformly con-tinuous on [Tlowast+infin) By Lemma 5 we can conclude that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0 i 1 2 3 4
limt⟶+infin
uj(t) minus vj(t)11138681113868111386811138681113868
11138681113868111386811138681113868 0 j 1 2 3(76)
is completes the proof and the solution of system (2)is globally attractive
Remark 3 From the result ofeorem 2 the feedback controlitems and delays have influence on the globally attractive of
system (2) namely the population densities for the system willapproach to a positive equilibrium when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H9)
Remark 4 It should not be difficult to see that the methodand skills of constructing a suitable Lyapunov function in thepaper are very different with those of [29] and the method ofconstructing Lyapunov function in [29] cannot be used inthis manuscript
4 Periodic Solution
Assuming that coefficients of system (2) are positive con-tinuous and ω minus periodic functions then system (2) ischanged to the ω minus periodic system In this section we shallobtain conditions for the existence uniqueness and stabilityof a positive periodic for system (2) by using the fixed-pointtheory and some new analysis method For convenience wegive firstly the following lemma
Lemma 6 (see [34]) Let S sub Rn be convex and compact Ifmapping T S⟶ S is continuous then there exists a fixedpoint ie there exists xlowast isin S such that T(xlowast) xlowast
Next we state and prove our main result with respect tothe periodic solution for system (2)
Theorem 3 Assume that system (2) is a ω-periodic systemand satisfies conditions (H1) minus (H9) then system (2) has apositive unique ω-periodic solution which is globally as-ymptotically stable
Proof According to the existence and uniqueness theorem ofsolutions of functional differential equations [35ndash38] we candefine a Poincare mapping T R7
+⟶ R7+ as follows
T X0( 1113857 X tω X0( 1113857 (77)
where X(tω X0) (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)) be a positive solution of system (2) with initialconditions (7) And define
S x1 x2 x3 x4 u1 u2 u3( 1113857 isin R7+
mi lexi leMi i 1 2 3 4
nj le uj leNj j 1 2 3
111386811138681113868111386811138681113868111386811138681113868
⎧⎨
⎩
⎫⎬
⎭
(78)
en it is obvious that S sub R7+ is a convex and compact set
By eorem 1 and the continuity of solution of system (2)with respect to initial conditions (7) the mappingT S⟶ S is continuous Furthermore it is not difficult toshow that system (2) has a positive unique ω minus periodicsolution which is globally asymptotic stability by usingLemma 6 and eorem 2
Remark 5 From the result of eorem 3 the feedbackcontrol items and delays have influence on the periodic ofω minus periodic system (2) at is the population densities forthe periodic system will tend to a positive ω minus periodicequilibrium when system (2) satisfies ω minus periodic initialconditions (7) and assumptions (H1) minus (H9)
Journal of Mathematics 13
5 Numerical Simulation
In this section we give some numerical simulations to illustratethe feasibility of our main results In order to facilitate theverification of eorem 3 where the system is a periodicsystem we select the periodic function as the coefficient ofsystem (2) and consider the following multidelay periodicpredator-prey model with feedback control and prey diffusion
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)minus
(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
minus (0015 + 0005 sin πt)u1(t)1113859
+(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t) (25 + 05 sin πt) minus (225 + 025 cos πt)x21113858 1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)[minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857
+(05 + 01 sin πt)u2(t)1113859
_x4(t) x4(t)[minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857
+(045 + 005 sin πt)u3(t)1113859
_u1(t) (15 + 05 cos πt) minus (16 + 04 sin πt)u1(t)
+(015 + 005 sin πt)x1(t)
_u2(t) (2 + 05 cos πt) minus (105 + 005 sin πt)u2(t)
minus (15 + 05 sin πt)x3(t)
_u3(t) (355 + 005 cos πt) minus (345 + 045 sin πt)u3(t)
minus (225 + 025 sin πt)x4(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(79)
where time delay τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 1 t isin [minus 004 0]
x2(0) 1
x3(t) sin t + 1 t isin [minus 001 0]
x4(t) sin t + 1 t isin [minus 003 0]
ui(0) 1 (i 1 2 3)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(80)
From the conditions of eorem 3 we select somespecific parameter values shown in models (79) and (80)according to the calculation Of course the choiceof parameters in the model is not unique It is not difficultto verify that system (79) satisfies the conditions of eorems1ndash3 It holds from eorems 1 and 2 that system (79) ispermanent and globally attractive By means of eorem 3system (79) has a positive unique periodic solution which isglobally asymptotic stability By using the software packageMATLAB 71 we can solve the numerical solutions of systems(79) and (80) as shown in Figures 1ndash3 Figure 1 shows that thepermanence of system (79) with initial conditions (80) andtime delay τ1 001 τ2 002 τ3 003 and τ4 004 Itis not difficult to see from Figure 2 that system (79) isglobally attractive Figure 3 shows the dynamic behavior ofsystem (79)
In general ecosystems represented by deterministicLotkandashVolterra models are not suitable for describing thereal behavior of population dynamics e feedbackcontrol variable we described above is strictly related tothe environmental noise effect It is well known that theenvironmental noise is a very important factor in mod-eling natural phenomena in ecological systems At pres-ent it is impossible to model population dynamicswithout considering the interaction between the ecolog-ical system and environmental noise always present innature In fact the environmental noise acts construc-tively producing counterintuitive effects and interestingnoise-induced phenomena such as stochastic resonancenoise-enhanced stability and resonant activation (cf[39ndash43]) In addition the study of nonlinear dynamicalsystems with external noise has found some counterin-tuitive phenomena that play a constructive role in noiseand are highly fundamental and practical interests inmany scientific fields (cf [44ndash47]) e presence of noisesources can alter the stability of the ecosystem (cf[48ndash51]) In addition this noise in general breaks thesymmetry of the ecosystem see for example [52] andmoreover it gives rise to extinction phenomena becausethe multiplicative noise has the effect of an absorbingbarrier see for example [53]
As a response to this we consider the following cor-responding stochastic predator-prey model with the mul-tiplicative noise sources
14 Journal of Mathematics
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)
minus(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
+Dξ1(t)1113859 +(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t)[(25 + 05 sin πt)
minus (225 + 025 cos πt)x2(t)1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)1113890 minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857+Dξ2(t)1113891
_x4(t) x4(t)1113890 minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857+Dξ3(t)1113891
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(81)
where ξi(t) are δ-correlated Gaussian white noise sourceswith zero mean that is langδi(t)rang 0 andlangδi(t)δi(tprime)rang Diδ(t minus tprime)δij with Di the noise intensities(here we choose all equal noise intensities that is Di D)and time delays τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 05 t isin [minus 004 0]
x2(0) 05
x3(t) sin t + 05 t isin [minus 001 0]
x4(t) sin t + 05 t isin [minus 003 0]
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(82)
x1(t)x2(t)
x3(t)x4(t)
04
05
06
07
08
09
1
11
12
13
5 10 15 20 25 30 35 40 45 500t
(a)
u1(t)u2(t)u3(t)
07
08
09
1
11
12
13
14
15
16
5 10 15 20 25 30 35 40 45 500t
(b)
Figure 1 e numerical solution of system (79) with initial condition (60) (80)
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
16
2 4 6 8 10 12 14 16 18 200t
Figure 2 Numerical solution of system (79) with different initialconditions
Journal of Mathematics 15
0
02
04
06
08
1
12
14
16x 3
(t)
02 04 06 08 1 12 14 160x2(t)
(a)
1
15
2
25
x 2(t)
05 1 15 2 250x1(t)
(b)
02
04
06
08
1
12
14
16
18
2
22
x 3(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(c)
0
02
04
06
08
1
12
14
16
x 4(t)
04 06 08 1 12 14 160 02x2(t)
(d)
02
04
06
08
1
12
14
16
18
2
x 4(t)
04 06 08 1 12 14 16 18 202x3(t)
(e)
02
04
06
08
1
12
14
16
18
2
22
x 4(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(f )
Figure 3 Continued
16 Journal of Mathematics
005
115
2
005
115
2
x2(t)x3 (t)
0
05
1
15
2
x 4(t)
(g)
051
152
25
115
225
x1(t)x2 (t)
0
05
1
15
2
25
x 3(t)
(h)
051
152
25
115
2250
05
1
15
2
25
x 4(t)
x1(t)x2 (t)
(i)
x1(t)x3 (t)
051
152
005
115
20
05
1
15
2
x 4(t)
(j)
Figure 3 Dynamic behavior of system (79)
D = 0005
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(a)
D = 001
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(b)
Figure 4 Continued
Journal of Mathematics 17
D = 002
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(c)
x1(t)x2(t)
x3(t)x4(t)
D = 004
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(d)
Figure 4 e numerical solutions of systems (81) and (82) with very low noise intensities
D = 01
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(a)
D = 02
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(b)
Figure 5 Continued
18 Journal of Mathematics
D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

lim inft⟶+infin
x1(t)gerl1
am11minus
am13M3
bl13a
m11minus
am14M4
bl14a
m11
minusdm1 N1
am11
minusDm
1am11
m1
(29)
For the second equation of system (2) it holds that
_x2(t) x2(t) r2(t) minus a22(t)x2(t)1113858 1113859
+D2(t) x1(t) minus x2(t)( 1113857
gex2(t) r2(t) minus a22(t)x2(t) minus D2(t)1113858 1113859
gex2(t) rl2 minus a
m22x2(t) minus D
m21113960 1113961
(30)
From assumption (H4) and by Lemma 2 we can get
lim inft⟶+infin
x2(t)gerl2 minus Dm
2am22
m2 (31)
For the fifth equation of system (2) we have
_u1(t) e1(t) minus f1(t)u1(t) + q1(t)x1(t)
ge el1 minus f
m1 u1(t) + q
l1m1
(32)
By Lemma 1 it holds that
lim inft⟶+infin
u1(t)geel1 + ql
1m1
fm1
n1 (33)
For the sixth and the seventh equations of system (2) wecan obtain
_u2(t) e2(t) minus f2(t)u2(t) minus q2(t)x3(t)
ge el2 minus f
m2 u2(t) minus q
m2 M3
_u3(t) e3(t) minus f3(t)u3(t) minus q3(t)x4(t)
ge el3 minus f
m3 u3(t) minus q
m3 M4
(34)
By Lemma 1 (H5) and (H6) we have
lim inft⟶+infin
u2(t)geel2 minus qm
2 M3
fm2
n2 (35)
lim inft⟶+infin
u3(t)geel3 minus qm
3 M4
fm3
n3 (36)
According to the third and the fourth equations ofsystem (2) we have
_x3(t) x3(t)1113890 minus r3(t) minus a33(t)x3 t minus τ1( 1113857
+a31(t)x1 t minus τ2( 1113857
b13(t) + x1 t minus τ2( 1113857+ d2(t)u2(t)
ge x3(t) minus rm3 minus a
m33x3 t minus τ1( 1113857 +
al31m1
bm13 +m1
+ dl2n21113890 1113891
_x4(t) x4(t)1113890 minus r4(t) minus a44(t)x4 t minus τ3( 1113857
+a41(t)x1 t minus τ4( 1113857
b14(t) + x1 t minus τ4( 1113857+ d3(t)u3(t)1113891
ge x4(t)1113890 minus rm4 minus a
m44x4 t minus τ3( 1113857
+al41m1
bm14 +m1
+ dl3n31113891
(37)
Using Lemma 4 (H7) and (H8) we also derive that
lim inft⟶+infin
x3(t)geal31m1( 1113857 bm
13 +m1( 1113857 + dl2n2 minus rm
3am33
times expal31m1
bm13 +m1
+ dl2n2 minus r
m3 minus a
m33M31113888 1113889τ11113890 1113891
m3
(38)
lim inft⟶+infin
x4(t)geal41m1( 1113857 bm
14 +m1( 1113857 + dl3n3 minus rm
4am44
times expal41m1
bm14 +m1
+ dl3n3 minus r
m4 minus a
m44M41113888 11138891113890 1113891τ3
m4
(39)
Summarizing (18)ndash(39) we complete the induction ofeorem 1
Remark 2 It is obvious that the proof method for Lemma21 in [29] is the differential inequality theory while that ofthis article is the delay differential inequality theory Fromthe result of eorem 1 the feedback control items anddelays have influence on the permanence of system (2) Inother words the densities of the prey and predator pop-ulations are uniformly bounded when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H8)
3 Global Attractivity
In this section the global attractivity of system (2) will bestudied To get the sufficient conditions for global attractivity ofsystem (2) we firstly give the following definition and Lemma
Journal of Mathematics 7
Definition 2 System (2) is said to be globally attractive ifthere exists a positive solution
X(t) x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)( 1113857
(40)
of system (2) such that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0
limt⟶+infin
ui(t) minus vi(t)1113868111386811138681113868
1113868111386811138681113868 0
i 1 2 3 4 j 1 2 3
(41)
for any other positive solutionY(t) (y1(t) y2(t) y3(t) y4(t) v1(t) v2(t) v3(t)) of sys-tem (2)
Lemma 5 (see [33]) If the function f(t) R+⟶ R isuniformly continuous and the limit limt⟶+infin 1113938
t
0 f(s)ds existsand is finite then limt⟶+infinf(t) 0
Next we state and prove our main result with respect tothe global attractivity for system (2)
Theorem 2 Assume that system (2) satisfies (H1)minus (H8) andthe following conditions
(H9) Ai gt 0 Bj gt 0 (i 1 2 3 4 j 1 2 3) where
B1 fl1 minus d
m1
B2 fl2 minus d
m2 minus M3d
m2 a
m33τ1
B3 fl3 minus d
m3 minus M4d
m3 a
m44τ3
A1 al11 minus
am13M3
bl13 +m1( 1113857
2 minusam14M4
bl14 +m1( 1113857
2 minusDm
2m2
minusam31b
m13
bl13 +m1( 1113857
2
minusM3a
m31a
m33τ1
bl13 +m1
minusam41b
m14
bl14 +m1( 1113857
2 minusM4a
m41a
m44τ3
bl14 +m1
minus qm1
A2 al22 minus Dm
1m1
A3 al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
+ dm2 N21113888 1113889a
m33τ1
minus M3 am33( 1113857
2τ1 minusam13b
m13 + am
13M1
bl13 +m1( 1113857
2 minus qm2
A4 al44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113888 1113889a
m44τ3
minus M4 am44( 1113857
2τ3 minusam14b
m14 + am
14M1
bl14 +m1( 1113857
2 minus qm3
(42)
-en system (2) is globally attractive
Proof Suppose that (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t)
u3(t)) and (y1(t) y2(t) y3(t) y4(t) v1(t) v2(t) v3(t)) areany two different positive solutions of system (2)en from
eorem 1 there exist positive constants Mi mi Njnj(i 1 2 3 4 j 1 2 3) and T such that
mi lexi(t) yi(t)leMi i 1 2 3 4
nj le uj(t) vj(t)leNj j 1 2 3(43)
We defineV1(t) lnx1(t) minus lny1(t)
11138681113868111386811138681113868111386811138681113868
V2(t) lnx2(t) minus lny2(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎨
⎩ (44)
Calculating the upper-right derivative of V1(t) andV2(t) along the solution of system (2) we have
1113944
2
i1D+Vi(T) 1113944
2
i1D+ lnxi(t) minus lnyi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961
le sgn x1(t) minus y1(t)1113864 11138651113890 minus a11(t) x1(t) minus y1(t)( 1113857
minusa13(t)b13(t) + a13(t)y1(t)( 1113857 x3(t) minus y3(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa13(t)y3(t) x1(t) minus y1(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa13(t)y3(t) x1(t) minus y1(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa14(t)b14(t) + a14(t)y1(t)( 1113857 x4(t) minus y4(t)( 1113857
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857
minusa14(t)y4(t) x1(t) minus y1(t)( 1113857
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857
minus d1(t) u1(t) minus v1(t)( 1113857 +D1(t)x2(t)
x1(t)minus
y2(t)
y1(t)1113888 11138891113891
+ sgn x2(t) minus y2(t)1113864 1113865 minus a22(t) x2(t) minus y2(t)( 11138571113858
+D2(t)x1(t)
x2(t)minus
y1(t)
y2(t)1113888 11138891113891
le minus a11(t) minusa13(t)y3(t)
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 11138571113888
minusa14(t)y4(t)
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 11138571113889
times x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868 minus a22(t) x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868
+a13(t)b13(t) + a13(t)y1(t)
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+a14(t)b14(t) + a14(t)y1(t)
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+ d1(t) u1(t) minus v1(t)1113868111386811138681113868
1113868111386811138681113868 + 1113957D1(t) + 1113957D2(t)
(45)where
8 Journal of Mathematics
1113957D1(t)
D1(t)x2(t)
x1(t)minus
y2(t)
y1(t)1113888 1113889 x1(t)gty1(t)
D1(t)y2(t)
y1(t)minus
x2(t)
x1(t)1113888 1113889 x1(t)lty1(t)
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
1113957D2(t)
D2(t)x1(t)
x2(t)minus
y1(t)
y2(t)1113888 1113889 x2(t)gty2(t)
D2(t)y1(t)
y2(t)minus
x1(t)
x2(t)1113888 1113889 x2(t)lty2(t)
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
(46)
Next we discuss 1113957D1(t) under the following three cases
(a) If x1(t)gty1(t) then
1113957D1(t)leD1(t)
x1(t)x2(t) minus y2(t)( 1113857
leDm
1m1
x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868
(47)
(b) If x1(t)lty1(t) then
1113957D1(t)leD1(t)
y1(t)y2(t) minus x2(t)( 1113857le
Dm1
m1x2(t) minus y2(t)
11138681113868111386811138681113868111386811138681113868
(48)
(c) If x1(t) y1(t) the same conclusion as (a) and (b)holds
Combining the conclusions in (a)ndash(c) we have
1113957D1(t)leDm
1m1
x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868 (49)
A similar argument shows that
1113957D2(t)leDm
2 (t)
mlsquo2x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868 (50)
By means of (45)ndash(50) we have
1113944
2
i1D+Vi(t)le minus a
l11 minus
am13M3
bl13 +m1( 1113857
2 minusam14M4
bl14 +m1( 1113857
2 minusDm
2m2
⎛⎝ ⎞⎠
times x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868 minus al22 minus
Dm1
m11113888 1113889 x2(t) minus y2(t)
11138681113868111386811138681113868111386811138681113868
+am13b
m13 + am
13M1
bl13 +m1( 1113857
2 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am14b
m14 + am
14M1
bl14 +m1( 1113857
2 x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868
+ dm1 u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868
(51)
Define
V31(t) lnx3(t) minus lny3(t)1113868111386811138681113868
1113868111386811138681113868 (52)
Calculating the upper right derivative of V31(t) along thesolution of system (2) it follows thatD+V31(t) sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3 t minus τ1( 1113857(1113858
minus y3 t minus τ1( 11138571113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ d2(t) u2(t) minus v2(t)( 11138571113859
sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3(t) minus y3(t)( 11138571113858
+ d2(t) u2(t) minus v2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+a33(t)1113946t
tminus τ1_x3(θ) minus _y3(θ)( 1113857dθ1113891
sgn x3(t) minus y3(t)1113864 1113865minus a33(t) x3(t) minus y3(t)( 11138571113859
+ d2(t) u2(t) minus v2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ a33(t)1113946t
tminus τ1x3(θ)1113890 minus r3(θ) minus a33(θ)x3 θ minus τ1( 11138571113888
+a31(θ)x1 θ minus τ2( 1113857
b13(θ) + x1 θ minus τ2( 1113857+ d2(θ)u2(θ)1113891
minus y3(θ)1113890 minus r3(θ) minus a33(θ)y3 θ minus τ1( 1113857
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)11138911113889dθ1113891
sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3(t) minus y3(t)( 11138571113858
+ d2(t) u2(t) minus y2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ a33(t)1113946t
tminus τ1x3(θ) minus y3(θ)( 1113857(
times 1113890 minus r3(θ) minus a33(θ)y3 θ minus τ1( 1113857
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
Journal of Mathematics 9
+ x3(θ)1113890 minus a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 1113857( 1113857
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857( 1113857
+ d2(θ) u2(θ) minus v2(θ)( 111385711138591113857dθ⎤⎦
le minus a33(t) x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 + d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ a33(t)1113946t
tminus τ11113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891 x3(θ) minus y3(θ)
11138681113868111386811138681113868111386811138681113868
+ x3(θ) a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+ d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(53)
Define
V32(t) 1113946t
tminus τ11113946
t
sa33 s + τ1( 1113857 1113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
times x3(θ) minus y3(θ)1113868111386811138681113868
1113868111386811138681113868
+ x3(θ)1113890a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
1113868111386811138681113868⎤⎦⎞⎠dθ ds
(54)
From (53) and (54) we have
1113944
2
i1D+V3i(t)le minus a33(t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+ d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ1a33 s + τ1( 1113857ds1113890r3(t) + a33(t)y3 t minus τ1( 1113857
+a31(t)y1 t minus τ2( 1113857
b13(t) + y1 t minus τ2( 1113857+ d2(t)v2(t)1113891
times x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 +M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
times a33(t) x3 t minus τ1( 1113857 minus y3 t minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
timesa31(t)
b13(t) + x1 t minus τ2( 1113857x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds times d2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(55)
We also define
V33(t) 1113946t
tminus τ2
a31 w + τ2( 1113857b13 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)( 1113857 b13 w + τ2( 1113857 + y1(w)( 1113857
timesx1(w) minus y1(w)|dw
+M3 1113946t
tminus τ11113946
w+τ1
wa33 s + τ1( 1113857a33 w + τ1( 1113857
times x3(w) minus y3(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M3 1113946t
tminus τ21113946
w+τ2
w+τ2minus τ1a33 s + τ1( 1113857
a31 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(56)
10 Journal of Mathematics
and let
V3(t) V31(t) + V32(t) + V33(t) (57)
According to (55) and (56) calculating the upper rightderivative of V3(t) we have
D+V3(t)le minus a
l33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+dm2 N21113889 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds
minus M3am33 1113946
t+τ1
ta
m33 s + τ1( 1113857ds1113891 x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3am31
bl13 +m1
⎡⎣
times1113946t+τ2
t+τ2minus τ1a
m33 s + τ1( 1113857ds1113891 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm2 +M3d
m2 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds1113890 1113891
times u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
le minus al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+ dm2 N21113857a
m33τ1 minus M3 a
m33( 1113857
2τ11113961 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3a
m31a
m33τ1
bl13 +m1
⎛⎝ ⎞⎠ x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868
+ dm2 +M3d
m2 a
m33τ1( 1113857 u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(58)
Similarly we define
V41(t) lnx4(t) minus lny4(t)1113868111386811138681113868
1113868111386811138681113868 (59)
Calculating the upper right derivative of V41(t) along thesolution of system (2) we get
D+V41(t) sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4 t minus τ3( 1113857(1113858
minus y4 t minus τ3( 11138571113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+d3(t) u3(t) minus v3(t)( 11138571113859
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+a44(t)1113946t
tminus τ3_x4(θ) minus _y4(θ)( 1113857dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus r4(θ) minus a44(θ)x4 θ minus τ3( 11138571113858(
+a41(θ)x1 θ minus τ4( 1113857
b14(θ) + x1 θ minus τ4( 1113857+ d3(θ)u3(θ)1113891
minus y4(θ) minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)11138911113889dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t) minus y4(t)( 11138571113858
+ d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus y4(θ)( 1113857
times minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)1113891
+ x4(θ) minus a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 1113857( 11138571113858
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857( 1113857
+d3(θ) u3(θ) minus v3(θ)( 111385711138591113857dθ1113859
le minus a44(t) x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 + d3(t) u3(t) minus v3(t)1113868111386811138681113868
1113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ a44(t)1113946t
tminus τ3r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+ d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(60)
Journal of Mathematics 11
We define
V42(t) 1113946t
tminus τ31113946
t
sa44 s + τ3( 1113857 r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ ds
(61)
By (60) and (61) we have
1113944
2
i1D+V4i(t)le minus a44(t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868 + d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ3a44 s + τ3( 1113857ds times 1113890r4(t) + a44(t)y4 t minus τ3( 1113857
+a41(t)y1 t minus τ4( 1113857
b14(t) + y1 t minus τ4( 1113857+ d3(t)v3(t)1113891
times x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 +M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
times a44(t) x4 t minus τ3( 1113857 minus y4 t minus τ3( 11138571113868111386811138681113868
1113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
timesa41(t)
b14(t) + x1 t minus τ4( 1113857x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds times d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(62)
Let
V4(t) V41(t) + V42(t) + V43(t) (63)
where
V43(t) 1113946t
tminus τ4
a41 w + τ4( 1113857b14 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)( 1113857 b14 w + τ4( 1113857 + y1(w)( 1113857
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868dw
+M4 1113946t
tminus τ31113946
w+τ3
wa44 s + τ3( 1113857a44 w + τ3( 1113857
times x4(w) minus y4(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M4 1113946t
tminus τ41113946
w+τ4
w+τ4minus τ3a44 s + τ3( 1113857
a41 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(64)
By (62) and (64) we have
D+V4(t)le minus a
l44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113890 11138911113888
times 1113946t
tminus τ3a
m44 s + τ3( 1113857ds
minus M4am44 1113946
t+τ3
ta
m44 s + τ3( 1113857ds1113889 x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+am41b
m14
bl14 +m1( 1113857
2 +M4am41
bl14 +m1
⎛⎝
times1113946t+τ4
t+τ4 minus τ3a
m44 s + τ3( 1113857ds1113889 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm3 +M4d
m3 1113946
t
tminus τ3a
m44 s + τ3( 1113857ds1113888 1113889 u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(65)
Moreover define V5(t) V6(t) andV7(t) by
V5(t) ln u1(t) minus ln v1(t)1113868111386811138681113868
1113868111386811138681113868
V6(t) ln u2(t) minus ln v2(t)1113868111386811138681113868
1113868111386811138681113868
V7(t) ln u3(t) minus ln v3(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
(66)
Calculating the upper right derivative of V5(t) V6(t)and V7(t) along the solutions of system (2) it holds that
D+V5(t)le sgn u1(t) minus v1(t)( 1113857 minus f1(t) u1(t)(1113858
minus v1(t)1113857 + q1(t) x1(t) minus y1(t)( 11138571113859
le minus fl1(t) u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868 + q
m1 (t) x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
(67)
D+V6(t)le sgn u2(t) minus v2(t)( 1113857 minus f2(t) u2(t)(1113858
minus v2(t)1113857 minus q2(t) x3(t) minus y3(t)( 11138571113859
le minus fl2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
+ qm2 (t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
(68)
12 Journal of Mathematics
D+V7(t)le sgn u3(t) minus v3(t)( 1113857 minus f3(t) u3(t)(1113858
minus v3(t)1113857 minus q3(t) x4(t) minus y4(t)( 11138571113859
le minus fl3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+ qm3 (t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
(69)
Finally we define a Lyapunov function as follows
V(t) 11139447
i1Vi(t) (70)
From (51) (58) (65) and (67)ndash(69) we can get that forall tgeT + τ
D+V(t)le minus 1113944
4
i1Ai xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 minus 1113944
3
j1Bj uj(t) minus vj(t)
11138681113868111386811138681113868
11138681113868111386811138681113868
(71)
In view of conditions (H9) of eorem 2 there exists aconstant αgt 0 and Tlowast gtT + τ such that for all tgeTlowast it holdsthat
Ai ge αgt 0
Bj ge αgt 0
i 1 2 3 4 j 1 2 3
(72)
Integrating fromTlowast to t on both sides of (71) and by (72)we have
V(t) + α1113946t
Tlowast1113944
4
i1xi(s) minus yi(s)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(s) minus vj(s)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠ds
leV Tlowast
( 1113857lt +infin
(73)
erefore V(t) is bounded on [Tlowast+infin) and we have
1113946infin
Tlowast1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠dsleV(T)
αlt +infin
(74)
By (74) we also have
1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113874 1113875 isin L1(T+infin)
(75)
Applying eorem 1 we can obtain that |xi(t) minus yi(t)||uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 and their derivativesremain bounded on [Tlowast+infin) and |xi(t) minus yi(t)| and|uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 are uniformly con-tinuous on [Tlowast+infin) By Lemma 5 we can conclude that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0 i 1 2 3 4
limt⟶+infin
uj(t) minus vj(t)11138681113868111386811138681113868
11138681113868111386811138681113868 0 j 1 2 3(76)
is completes the proof and the solution of system (2)is globally attractive
Remark 3 From the result ofeorem 2 the feedback controlitems and delays have influence on the globally attractive of
system (2) namely the population densities for the system willapproach to a positive equilibrium when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H9)
Remark 4 It should not be difficult to see that the methodand skills of constructing a suitable Lyapunov function in thepaper are very different with those of [29] and the method ofconstructing Lyapunov function in [29] cannot be used inthis manuscript
4 Periodic Solution
Assuming that coefficients of system (2) are positive con-tinuous and ω minus periodic functions then system (2) ischanged to the ω minus periodic system In this section we shallobtain conditions for the existence uniqueness and stabilityof a positive periodic for system (2) by using the fixed-pointtheory and some new analysis method For convenience wegive firstly the following lemma
Lemma 6 (see [34]) Let S sub Rn be convex and compact Ifmapping T S⟶ S is continuous then there exists a fixedpoint ie there exists xlowast isin S such that T(xlowast) xlowast
Next we state and prove our main result with respect tothe periodic solution for system (2)
Theorem 3 Assume that system (2) is a ω-periodic systemand satisfies conditions (H1) minus (H9) then system (2) has apositive unique ω-periodic solution which is globally as-ymptotically stable
Proof According to the existence and uniqueness theorem ofsolutions of functional differential equations [35ndash38] we candefine a Poincare mapping T R7
+⟶ R7+ as follows
T X0( 1113857 X tω X0( 1113857 (77)
where X(tω X0) (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)) be a positive solution of system (2) with initialconditions (7) And define
S x1 x2 x3 x4 u1 u2 u3( 1113857 isin R7+
mi lexi leMi i 1 2 3 4
nj le uj leNj j 1 2 3
111386811138681113868111386811138681113868111386811138681113868
⎧⎨
⎩
⎫⎬
⎭
(78)
en it is obvious that S sub R7+ is a convex and compact set
By eorem 1 and the continuity of solution of system (2)with respect to initial conditions (7) the mappingT S⟶ S is continuous Furthermore it is not difficult toshow that system (2) has a positive unique ω minus periodicsolution which is globally asymptotic stability by usingLemma 6 and eorem 2
Remark 5 From the result of eorem 3 the feedbackcontrol items and delays have influence on the periodic ofω minus periodic system (2) at is the population densities forthe periodic system will tend to a positive ω minus periodicequilibrium when system (2) satisfies ω minus periodic initialconditions (7) and assumptions (H1) minus (H9)
Journal of Mathematics 13
5 Numerical Simulation
In this section we give some numerical simulations to illustratethe feasibility of our main results In order to facilitate theverification of eorem 3 where the system is a periodicsystem we select the periodic function as the coefficient ofsystem (2) and consider the following multidelay periodicpredator-prey model with feedback control and prey diffusion
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)minus
(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
minus (0015 + 0005 sin πt)u1(t)1113859
+(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t) (25 + 05 sin πt) minus (225 + 025 cos πt)x21113858 1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)[minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857
+(05 + 01 sin πt)u2(t)1113859
_x4(t) x4(t)[minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857
+(045 + 005 sin πt)u3(t)1113859
_u1(t) (15 + 05 cos πt) minus (16 + 04 sin πt)u1(t)
+(015 + 005 sin πt)x1(t)
_u2(t) (2 + 05 cos πt) minus (105 + 005 sin πt)u2(t)
minus (15 + 05 sin πt)x3(t)
_u3(t) (355 + 005 cos πt) minus (345 + 045 sin πt)u3(t)
minus (225 + 025 sin πt)x4(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(79)
where time delay τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 1 t isin [minus 004 0]
x2(0) 1
x3(t) sin t + 1 t isin [minus 001 0]
x4(t) sin t + 1 t isin [minus 003 0]
ui(0) 1 (i 1 2 3)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(80)
From the conditions of eorem 3 we select somespecific parameter values shown in models (79) and (80)according to the calculation Of course the choiceof parameters in the model is not unique It is not difficultto verify that system (79) satisfies the conditions of eorems1ndash3 It holds from eorems 1 and 2 that system (79) ispermanent and globally attractive By means of eorem 3system (79) has a positive unique periodic solution which isglobally asymptotic stability By using the software packageMATLAB 71 we can solve the numerical solutions of systems(79) and (80) as shown in Figures 1ndash3 Figure 1 shows that thepermanence of system (79) with initial conditions (80) andtime delay τ1 001 τ2 002 τ3 003 and τ4 004 Itis not difficult to see from Figure 2 that system (79) isglobally attractive Figure 3 shows the dynamic behavior ofsystem (79)
In general ecosystems represented by deterministicLotkandashVolterra models are not suitable for describing thereal behavior of population dynamics e feedbackcontrol variable we described above is strictly related tothe environmental noise effect It is well known that theenvironmental noise is a very important factor in mod-eling natural phenomena in ecological systems At pres-ent it is impossible to model population dynamicswithout considering the interaction between the ecolog-ical system and environmental noise always present innature In fact the environmental noise acts construc-tively producing counterintuitive effects and interestingnoise-induced phenomena such as stochastic resonancenoise-enhanced stability and resonant activation (cf[39ndash43]) In addition the study of nonlinear dynamicalsystems with external noise has found some counterin-tuitive phenomena that play a constructive role in noiseand are highly fundamental and practical interests inmany scientific fields (cf [44ndash47]) e presence of noisesources can alter the stability of the ecosystem (cf[48ndash51]) In addition this noise in general breaks thesymmetry of the ecosystem see for example [52] andmoreover it gives rise to extinction phenomena becausethe multiplicative noise has the effect of an absorbingbarrier see for example [53]
As a response to this we consider the following cor-responding stochastic predator-prey model with the mul-tiplicative noise sources
14 Journal of Mathematics
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)
minus(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
+Dξ1(t)1113859 +(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t)[(25 + 05 sin πt)
minus (225 + 025 cos πt)x2(t)1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)1113890 minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857+Dξ2(t)1113891
_x4(t) x4(t)1113890 minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857+Dξ3(t)1113891
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(81)
where ξi(t) are δ-correlated Gaussian white noise sourceswith zero mean that is langδi(t)rang 0 andlangδi(t)δi(tprime)rang Diδ(t minus tprime)δij with Di the noise intensities(here we choose all equal noise intensities that is Di D)and time delays τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 05 t isin [minus 004 0]
x2(0) 05
x3(t) sin t + 05 t isin [minus 001 0]
x4(t) sin t + 05 t isin [minus 003 0]
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(82)
x1(t)x2(t)
x3(t)x4(t)
04
05
06
07
08
09
1
11
12
13
5 10 15 20 25 30 35 40 45 500t
(a)
u1(t)u2(t)u3(t)
07
08
09
1
11
12
13
14
15
16
5 10 15 20 25 30 35 40 45 500t
(b)
Figure 1 e numerical solution of system (79) with initial condition (60) (80)
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
16
2 4 6 8 10 12 14 16 18 200t
Figure 2 Numerical solution of system (79) with different initialconditions
Journal of Mathematics 15
0
02
04
06
08
1
12
14
16x 3
(t)
02 04 06 08 1 12 14 160x2(t)
(a)
1
15
2
25
x 2(t)
05 1 15 2 250x1(t)
(b)
02
04
06
08
1
12
14
16
18
2
22
x 3(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(c)
0
02
04
06
08
1
12
14
16
x 4(t)
04 06 08 1 12 14 160 02x2(t)
(d)
02
04
06
08
1
12
14
16
18
2
x 4(t)
04 06 08 1 12 14 16 18 202x3(t)
(e)
02
04
06
08
1
12
14
16
18
2
22
x 4(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(f )
Figure 3 Continued
16 Journal of Mathematics
005
115
2
005
115
2
x2(t)x3 (t)
0
05
1
15
2
x 4(t)
(g)
051
152
25
115
225
x1(t)x2 (t)
0
05
1
15
2
25
x 3(t)
(h)
051
152
25
115
2250
05
1
15
2
25
x 4(t)
x1(t)x2 (t)
(i)
x1(t)x3 (t)
051
152
005
115
20
05
1
15
2
x 4(t)
(j)
Figure 3 Dynamic behavior of system (79)
D = 0005
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(a)
D = 001
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(b)
Figure 4 Continued
Journal of Mathematics 17
D = 002
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(c)
x1(t)x2(t)
x3(t)x4(t)
D = 004
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(d)
Figure 4 e numerical solutions of systems (81) and (82) with very low noise intensities
D = 01
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(a)
D = 02
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(b)
Figure 5 Continued
18 Journal of Mathematics
D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

Definition 2 System (2) is said to be globally attractive ifthere exists a positive solution
X(t) x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)( 1113857
(40)
of system (2) such that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0
limt⟶+infin
ui(t) minus vi(t)1113868111386811138681113868
1113868111386811138681113868 0
i 1 2 3 4 j 1 2 3
(41)
for any other positive solutionY(t) (y1(t) y2(t) y3(t) y4(t) v1(t) v2(t) v3(t)) of sys-tem (2)
Lemma 5 (see [33]) If the function f(t) R+⟶ R isuniformly continuous and the limit limt⟶+infin 1113938
t
0 f(s)ds existsand is finite then limt⟶+infinf(t) 0
Next we state and prove our main result with respect tothe global attractivity for system (2)
Theorem 2 Assume that system (2) satisfies (H1)minus (H8) andthe following conditions
(H9) Ai gt 0 Bj gt 0 (i 1 2 3 4 j 1 2 3) where
B1 fl1 minus d
m1
B2 fl2 minus d
m2 minus M3d
m2 a
m33τ1
B3 fl3 minus d
m3 minus M4d
m3 a
m44τ3
A1 al11 minus
am13M3
bl13 +m1( 1113857
2 minusam14M4
bl14 +m1( 1113857
2 minusDm
2m2
minusam31b
m13
bl13 +m1( 1113857
2
minusM3a
m31a
m33τ1
bl13 +m1
minusam41b
m14
bl14 +m1( 1113857
2 minusM4a
m41a
m44τ3
bl14 +m1
minus qm1
A2 al22 minus Dm
1m1
A3 al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
+ dm2 N21113888 1113889a
m33τ1
minus M3 am33( 1113857
2τ1 minusam13b
m13 + am
13M1
bl13 +m1( 1113857
2 minus qm2
A4 al44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113888 1113889a
m44τ3
minus M4 am44( 1113857
2τ3 minusam14b
m14 + am
14M1
bl14 +m1( 1113857
2 minus qm3
(42)
-en system (2) is globally attractive
Proof Suppose that (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t)
u3(t)) and (y1(t) y2(t) y3(t) y4(t) v1(t) v2(t) v3(t)) areany two different positive solutions of system (2)en from
eorem 1 there exist positive constants Mi mi Njnj(i 1 2 3 4 j 1 2 3) and T such that
mi lexi(t) yi(t)leMi i 1 2 3 4
nj le uj(t) vj(t)leNj j 1 2 3(43)
We defineV1(t) lnx1(t) minus lny1(t)
11138681113868111386811138681113868111386811138681113868
V2(t) lnx2(t) minus lny2(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎨
⎩ (44)
Calculating the upper-right derivative of V1(t) andV2(t) along the solution of system (2) we have
1113944
2
i1D+Vi(T) 1113944
2
i1D+ lnxi(t) minus lnyi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961
le sgn x1(t) minus y1(t)1113864 11138651113890 minus a11(t) x1(t) minus y1(t)( 1113857
minusa13(t)b13(t) + a13(t)y1(t)( 1113857 x3(t) minus y3(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa13(t)y3(t) x1(t) minus y1(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa13(t)y3(t) x1(t) minus y1(t)( 1113857
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857
minusa14(t)b14(t) + a14(t)y1(t)( 1113857 x4(t) minus y4(t)( 1113857
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857
minusa14(t)y4(t) x1(t) minus y1(t)( 1113857
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857
minus d1(t) u1(t) minus v1(t)( 1113857 +D1(t)x2(t)
x1(t)minus
y2(t)
y1(t)1113888 11138891113891
+ sgn x2(t) minus y2(t)1113864 1113865 minus a22(t) x2(t) minus y2(t)( 11138571113858
+D2(t)x1(t)
x2(t)minus
y1(t)
y2(t)1113888 11138891113891
le minus a11(t) minusa13(t)y3(t)
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 11138571113888
minusa14(t)y4(t)
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 11138571113889
times x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868 minus a22(t) x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868
+a13(t)b13(t) + a13(t)y1(t)
b13(t) + x1(t)( 1113857 b13(t) + y1(t)( 1113857x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+a14(t)b14(t) + a14(t)y1(t)
b14(t) + x1(t)( 1113857 b14(t) + y1(t)( 1113857x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+ d1(t) u1(t) minus v1(t)1113868111386811138681113868
1113868111386811138681113868 + 1113957D1(t) + 1113957D2(t)
(45)where
8 Journal of Mathematics
1113957D1(t)
D1(t)x2(t)
x1(t)minus
y2(t)
y1(t)1113888 1113889 x1(t)gty1(t)
D1(t)y2(t)
y1(t)minus
x2(t)
x1(t)1113888 1113889 x1(t)lty1(t)
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
1113957D2(t)
D2(t)x1(t)
x2(t)minus
y1(t)
y2(t)1113888 1113889 x2(t)gty2(t)
D2(t)y1(t)
y2(t)minus
x1(t)
x2(t)1113888 1113889 x2(t)lty2(t)
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
(46)
Next we discuss 1113957D1(t) under the following three cases
(a) If x1(t)gty1(t) then
1113957D1(t)leD1(t)
x1(t)x2(t) minus y2(t)( 1113857
leDm
1m1
x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868
(47)
(b) If x1(t)lty1(t) then
1113957D1(t)leD1(t)
y1(t)y2(t) minus x2(t)( 1113857le
Dm1
m1x2(t) minus y2(t)
11138681113868111386811138681113868111386811138681113868
(48)
(c) If x1(t) y1(t) the same conclusion as (a) and (b)holds
Combining the conclusions in (a)ndash(c) we have
1113957D1(t)leDm
1m1
x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868 (49)
A similar argument shows that
1113957D2(t)leDm
2 (t)
mlsquo2x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868 (50)
By means of (45)ndash(50) we have
1113944
2
i1D+Vi(t)le minus a
l11 minus
am13M3
bl13 +m1( 1113857
2 minusam14M4
bl14 +m1( 1113857
2 minusDm
2m2
⎛⎝ ⎞⎠
times x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868 minus al22 minus
Dm1
m11113888 1113889 x2(t) minus y2(t)
11138681113868111386811138681113868111386811138681113868
+am13b
m13 + am
13M1
bl13 +m1( 1113857
2 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am14b
m14 + am
14M1
bl14 +m1( 1113857
2 x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868
+ dm1 u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868
(51)
Define
V31(t) lnx3(t) minus lny3(t)1113868111386811138681113868
1113868111386811138681113868 (52)
Calculating the upper right derivative of V31(t) along thesolution of system (2) it follows thatD+V31(t) sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3 t minus τ1( 1113857(1113858
minus y3 t minus τ1( 11138571113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ d2(t) u2(t) minus v2(t)( 11138571113859
sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3(t) minus y3(t)( 11138571113858
+ d2(t) u2(t) minus v2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+a33(t)1113946t
tminus τ1_x3(θ) minus _y3(θ)( 1113857dθ1113891
sgn x3(t) minus y3(t)1113864 1113865minus a33(t) x3(t) minus y3(t)( 11138571113859
+ d2(t) u2(t) minus v2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ a33(t)1113946t
tminus τ1x3(θ)1113890 minus r3(θ) minus a33(θ)x3 θ minus τ1( 11138571113888
+a31(θ)x1 θ minus τ2( 1113857
b13(θ) + x1 θ minus τ2( 1113857+ d2(θ)u2(θ)1113891
minus y3(θ)1113890 minus r3(θ) minus a33(θ)y3 θ minus τ1( 1113857
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)11138911113889dθ1113891
sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3(t) minus y3(t)( 11138571113858
+ d2(t) u2(t) minus y2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ a33(t)1113946t
tminus τ1x3(θ) minus y3(θ)( 1113857(
times 1113890 minus r3(θ) minus a33(θ)y3 θ minus τ1( 1113857
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
Journal of Mathematics 9
+ x3(θ)1113890 minus a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 1113857( 1113857
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857( 1113857
+ d2(θ) u2(θ) minus v2(θ)( 111385711138591113857dθ⎤⎦
le minus a33(t) x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 + d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ a33(t)1113946t
tminus τ11113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891 x3(θ) minus y3(θ)
11138681113868111386811138681113868111386811138681113868
+ x3(θ) a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+ d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(53)
Define
V32(t) 1113946t
tminus τ11113946
t
sa33 s + τ1( 1113857 1113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
times x3(θ) minus y3(θ)1113868111386811138681113868
1113868111386811138681113868
+ x3(θ)1113890a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
1113868111386811138681113868⎤⎦⎞⎠dθ ds
(54)
From (53) and (54) we have
1113944
2
i1D+V3i(t)le minus a33(t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+ d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ1a33 s + τ1( 1113857ds1113890r3(t) + a33(t)y3 t minus τ1( 1113857
+a31(t)y1 t minus τ2( 1113857
b13(t) + y1 t minus τ2( 1113857+ d2(t)v2(t)1113891
times x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 +M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
times a33(t) x3 t minus τ1( 1113857 minus y3 t minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
timesa31(t)
b13(t) + x1 t minus τ2( 1113857x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds times d2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(55)
We also define
V33(t) 1113946t
tminus τ2
a31 w + τ2( 1113857b13 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)( 1113857 b13 w + τ2( 1113857 + y1(w)( 1113857
timesx1(w) minus y1(w)|dw
+M3 1113946t
tminus τ11113946
w+τ1
wa33 s + τ1( 1113857a33 w + τ1( 1113857
times x3(w) minus y3(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M3 1113946t
tminus τ21113946
w+τ2
w+τ2minus τ1a33 s + τ1( 1113857
a31 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(56)
10 Journal of Mathematics
and let
V3(t) V31(t) + V32(t) + V33(t) (57)
According to (55) and (56) calculating the upper rightderivative of V3(t) we have
D+V3(t)le minus a
l33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+dm2 N21113889 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds
minus M3am33 1113946
t+τ1
ta
m33 s + τ1( 1113857ds1113891 x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3am31
bl13 +m1
⎡⎣
times1113946t+τ2
t+τ2minus τ1a
m33 s + τ1( 1113857ds1113891 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm2 +M3d
m2 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds1113890 1113891
times u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
le minus al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+ dm2 N21113857a
m33τ1 minus M3 a
m33( 1113857
2τ11113961 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3a
m31a
m33τ1
bl13 +m1
⎛⎝ ⎞⎠ x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868
+ dm2 +M3d
m2 a
m33τ1( 1113857 u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(58)
Similarly we define
V41(t) lnx4(t) minus lny4(t)1113868111386811138681113868
1113868111386811138681113868 (59)
Calculating the upper right derivative of V41(t) along thesolution of system (2) we get
D+V41(t) sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4 t minus τ3( 1113857(1113858
minus y4 t minus τ3( 11138571113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+d3(t) u3(t) minus v3(t)( 11138571113859
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+a44(t)1113946t
tminus τ3_x4(θ) minus _y4(θ)( 1113857dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus r4(θ) minus a44(θ)x4 θ minus τ3( 11138571113858(
+a41(θ)x1 θ minus τ4( 1113857
b14(θ) + x1 θ minus τ4( 1113857+ d3(θ)u3(θ)1113891
minus y4(θ) minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)11138911113889dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t) minus y4(t)( 11138571113858
+ d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus y4(θ)( 1113857
times minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)1113891
+ x4(θ) minus a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 1113857( 11138571113858
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857( 1113857
+d3(θ) u3(θ) minus v3(θ)( 111385711138591113857dθ1113859
le minus a44(t) x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 + d3(t) u3(t) minus v3(t)1113868111386811138681113868
1113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ a44(t)1113946t
tminus τ3r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+ d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(60)
Journal of Mathematics 11
We define
V42(t) 1113946t
tminus τ31113946
t
sa44 s + τ3( 1113857 r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ ds
(61)
By (60) and (61) we have
1113944
2
i1D+V4i(t)le minus a44(t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868 + d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ3a44 s + τ3( 1113857ds times 1113890r4(t) + a44(t)y4 t minus τ3( 1113857
+a41(t)y1 t minus τ4( 1113857
b14(t) + y1 t minus τ4( 1113857+ d3(t)v3(t)1113891
times x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 +M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
times a44(t) x4 t minus τ3( 1113857 minus y4 t minus τ3( 11138571113868111386811138681113868
1113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
timesa41(t)
b14(t) + x1 t minus τ4( 1113857x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds times d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(62)
Let
V4(t) V41(t) + V42(t) + V43(t) (63)
where
V43(t) 1113946t
tminus τ4
a41 w + τ4( 1113857b14 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)( 1113857 b14 w + τ4( 1113857 + y1(w)( 1113857
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868dw
+M4 1113946t
tminus τ31113946
w+τ3
wa44 s + τ3( 1113857a44 w + τ3( 1113857
times x4(w) minus y4(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M4 1113946t
tminus τ41113946
w+τ4
w+τ4minus τ3a44 s + τ3( 1113857
a41 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(64)
By (62) and (64) we have
D+V4(t)le minus a
l44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113890 11138911113888
times 1113946t
tminus τ3a
m44 s + τ3( 1113857ds
minus M4am44 1113946
t+τ3
ta
m44 s + τ3( 1113857ds1113889 x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+am41b
m14
bl14 +m1( 1113857
2 +M4am41
bl14 +m1
⎛⎝
times1113946t+τ4
t+τ4 minus τ3a
m44 s + τ3( 1113857ds1113889 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm3 +M4d
m3 1113946
t
tminus τ3a
m44 s + τ3( 1113857ds1113888 1113889 u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(65)
Moreover define V5(t) V6(t) andV7(t) by
V5(t) ln u1(t) minus ln v1(t)1113868111386811138681113868
1113868111386811138681113868
V6(t) ln u2(t) minus ln v2(t)1113868111386811138681113868
1113868111386811138681113868
V7(t) ln u3(t) minus ln v3(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
(66)
Calculating the upper right derivative of V5(t) V6(t)and V7(t) along the solutions of system (2) it holds that
D+V5(t)le sgn u1(t) minus v1(t)( 1113857 minus f1(t) u1(t)(1113858
minus v1(t)1113857 + q1(t) x1(t) minus y1(t)( 11138571113859
le minus fl1(t) u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868 + q
m1 (t) x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
(67)
D+V6(t)le sgn u2(t) minus v2(t)( 1113857 minus f2(t) u2(t)(1113858
minus v2(t)1113857 minus q2(t) x3(t) minus y3(t)( 11138571113859
le minus fl2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
+ qm2 (t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
(68)
12 Journal of Mathematics
D+V7(t)le sgn u3(t) minus v3(t)( 1113857 minus f3(t) u3(t)(1113858
minus v3(t)1113857 minus q3(t) x4(t) minus y4(t)( 11138571113859
le minus fl3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+ qm3 (t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
(69)
Finally we define a Lyapunov function as follows
V(t) 11139447
i1Vi(t) (70)
From (51) (58) (65) and (67)ndash(69) we can get that forall tgeT + τ
D+V(t)le minus 1113944
4
i1Ai xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 minus 1113944
3
j1Bj uj(t) minus vj(t)
11138681113868111386811138681113868
11138681113868111386811138681113868
(71)
In view of conditions (H9) of eorem 2 there exists aconstant αgt 0 and Tlowast gtT + τ such that for all tgeTlowast it holdsthat
Ai ge αgt 0
Bj ge αgt 0
i 1 2 3 4 j 1 2 3
(72)
Integrating fromTlowast to t on both sides of (71) and by (72)we have
V(t) + α1113946t
Tlowast1113944
4
i1xi(s) minus yi(s)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(s) minus vj(s)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠ds
leV Tlowast
( 1113857lt +infin
(73)
erefore V(t) is bounded on [Tlowast+infin) and we have
1113946infin
Tlowast1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠dsleV(T)
αlt +infin
(74)
By (74) we also have
1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113874 1113875 isin L1(T+infin)
(75)
Applying eorem 1 we can obtain that |xi(t) minus yi(t)||uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 and their derivativesremain bounded on [Tlowast+infin) and |xi(t) minus yi(t)| and|uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 are uniformly con-tinuous on [Tlowast+infin) By Lemma 5 we can conclude that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0 i 1 2 3 4
limt⟶+infin
uj(t) minus vj(t)11138681113868111386811138681113868
11138681113868111386811138681113868 0 j 1 2 3(76)
is completes the proof and the solution of system (2)is globally attractive
Remark 3 From the result ofeorem 2 the feedback controlitems and delays have influence on the globally attractive of
system (2) namely the population densities for the system willapproach to a positive equilibrium when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H9)
Remark 4 It should not be difficult to see that the methodand skills of constructing a suitable Lyapunov function in thepaper are very different with those of [29] and the method ofconstructing Lyapunov function in [29] cannot be used inthis manuscript
4 Periodic Solution
Assuming that coefficients of system (2) are positive con-tinuous and ω minus periodic functions then system (2) ischanged to the ω minus periodic system In this section we shallobtain conditions for the existence uniqueness and stabilityof a positive periodic for system (2) by using the fixed-pointtheory and some new analysis method For convenience wegive firstly the following lemma
Lemma 6 (see [34]) Let S sub Rn be convex and compact Ifmapping T S⟶ S is continuous then there exists a fixedpoint ie there exists xlowast isin S such that T(xlowast) xlowast
Next we state and prove our main result with respect tothe periodic solution for system (2)
Theorem 3 Assume that system (2) is a ω-periodic systemand satisfies conditions (H1) minus (H9) then system (2) has apositive unique ω-periodic solution which is globally as-ymptotically stable
Proof According to the existence and uniqueness theorem ofsolutions of functional differential equations [35ndash38] we candefine a Poincare mapping T R7
+⟶ R7+ as follows
T X0( 1113857 X tω X0( 1113857 (77)
where X(tω X0) (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)) be a positive solution of system (2) with initialconditions (7) And define
S x1 x2 x3 x4 u1 u2 u3( 1113857 isin R7+
mi lexi leMi i 1 2 3 4
nj le uj leNj j 1 2 3
111386811138681113868111386811138681113868111386811138681113868
⎧⎨
⎩
⎫⎬
⎭
(78)
en it is obvious that S sub R7+ is a convex and compact set
By eorem 1 and the continuity of solution of system (2)with respect to initial conditions (7) the mappingT S⟶ S is continuous Furthermore it is not difficult toshow that system (2) has a positive unique ω minus periodicsolution which is globally asymptotic stability by usingLemma 6 and eorem 2
Remark 5 From the result of eorem 3 the feedbackcontrol items and delays have influence on the periodic ofω minus periodic system (2) at is the population densities forthe periodic system will tend to a positive ω minus periodicequilibrium when system (2) satisfies ω minus periodic initialconditions (7) and assumptions (H1) minus (H9)
Journal of Mathematics 13
5 Numerical Simulation
In this section we give some numerical simulations to illustratethe feasibility of our main results In order to facilitate theverification of eorem 3 where the system is a periodicsystem we select the periodic function as the coefficient ofsystem (2) and consider the following multidelay periodicpredator-prey model with feedback control and prey diffusion
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)minus
(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
minus (0015 + 0005 sin πt)u1(t)1113859
+(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t) (25 + 05 sin πt) minus (225 + 025 cos πt)x21113858 1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)[minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857
+(05 + 01 sin πt)u2(t)1113859
_x4(t) x4(t)[minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857
+(045 + 005 sin πt)u3(t)1113859
_u1(t) (15 + 05 cos πt) minus (16 + 04 sin πt)u1(t)
+(015 + 005 sin πt)x1(t)
_u2(t) (2 + 05 cos πt) minus (105 + 005 sin πt)u2(t)
minus (15 + 05 sin πt)x3(t)
_u3(t) (355 + 005 cos πt) minus (345 + 045 sin πt)u3(t)
minus (225 + 025 sin πt)x4(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(79)
where time delay τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 1 t isin [minus 004 0]
x2(0) 1
x3(t) sin t + 1 t isin [minus 001 0]
x4(t) sin t + 1 t isin [minus 003 0]
ui(0) 1 (i 1 2 3)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(80)
From the conditions of eorem 3 we select somespecific parameter values shown in models (79) and (80)according to the calculation Of course the choiceof parameters in the model is not unique It is not difficultto verify that system (79) satisfies the conditions of eorems1ndash3 It holds from eorems 1 and 2 that system (79) ispermanent and globally attractive By means of eorem 3system (79) has a positive unique periodic solution which isglobally asymptotic stability By using the software packageMATLAB 71 we can solve the numerical solutions of systems(79) and (80) as shown in Figures 1ndash3 Figure 1 shows that thepermanence of system (79) with initial conditions (80) andtime delay τ1 001 τ2 002 τ3 003 and τ4 004 Itis not difficult to see from Figure 2 that system (79) isglobally attractive Figure 3 shows the dynamic behavior ofsystem (79)
In general ecosystems represented by deterministicLotkandashVolterra models are not suitable for describing thereal behavior of population dynamics e feedbackcontrol variable we described above is strictly related tothe environmental noise effect It is well known that theenvironmental noise is a very important factor in mod-eling natural phenomena in ecological systems At pres-ent it is impossible to model population dynamicswithout considering the interaction between the ecolog-ical system and environmental noise always present innature In fact the environmental noise acts construc-tively producing counterintuitive effects and interestingnoise-induced phenomena such as stochastic resonancenoise-enhanced stability and resonant activation (cf[39ndash43]) In addition the study of nonlinear dynamicalsystems with external noise has found some counterin-tuitive phenomena that play a constructive role in noiseand are highly fundamental and practical interests inmany scientific fields (cf [44ndash47]) e presence of noisesources can alter the stability of the ecosystem (cf[48ndash51]) In addition this noise in general breaks thesymmetry of the ecosystem see for example [52] andmoreover it gives rise to extinction phenomena becausethe multiplicative noise has the effect of an absorbingbarrier see for example [53]
As a response to this we consider the following cor-responding stochastic predator-prey model with the mul-tiplicative noise sources
14 Journal of Mathematics
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)
minus(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
+Dξ1(t)1113859 +(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t)[(25 + 05 sin πt)
minus (225 + 025 cos πt)x2(t)1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)1113890 minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857+Dξ2(t)1113891
_x4(t) x4(t)1113890 minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857+Dξ3(t)1113891
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(81)
where ξi(t) are δ-correlated Gaussian white noise sourceswith zero mean that is langδi(t)rang 0 andlangδi(t)δi(tprime)rang Diδ(t minus tprime)δij with Di the noise intensities(here we choose all equal noise intensities that is Di D)and time delays τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 05 t isin [minus 004 0]
x2(0) 05
x3(t) sin t + 05 t isin [minus 001 0]
x4(t) sin t + 05 t isin [minus 003 0]
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(82)
x1(t)x2(t)
x3(t)x4(t)
04
05
06
07
08
09
1
11
12
13
5 10 15 20 25 30 35 40 45 500t
(a)
u1(t)u2(t)u3(t)
07
08
09
1
11
12
13
14
15
16
5 10 15 20 25 30 35 40 45 500t
(b)
Figure 1 e numerical solution of system (79) with initial condition (60) (80)
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
16
2 4 6 8 10 12 14 16 18 200t
Figure 2 Numerical solution of system (79) with different initialconditions
Journal of Mathematics 15
0
02
04
06
08
1
12
14
16x 3
(t)
02 04 06 08 1 12 14 160x2(t)
(a)
1
15
2
25
x 2(t)
05 1 15 2 250x1(t)
(b)
02
04
06
08
1
12
14
16
18
2
22
x 3(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(c)
0
02
04
06
08
1
12
14
16
x 4(t)
04 06 08 1 12 14 160 02x2(t)
(d)
02
04
06
08
1
12
14
16
18
2
x 4(t)
04 06 08 1 12 14 16 18 202x3(t)
(e)
02
04
06
08
1
12
14
16
18
2
22
x 4(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(f )
Figure 3 Continued
16 Journal of Mathematics
005
115
2
005
115
2
x2(t)x3 (t)
0
05
1
15
2
x 4(t)
(g)
051
152
25
115
225
x1(t)x2 (t)
0
05
1
15
2
25
x 3(t)
(h)
051
152
25
115
2250
05
1
15
2
25
x 4(t)
x1(t)x2 (t)
(i)
x1(t)x3 (t)
051
152
005
115
20
05
1
15
2
x 4(t)
(j)
Figure 3 Dynamic behavior of system (79)
D = 0005
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(a)
D = 001
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(b)
Figure 4 Continued
Journal of Mathematics 17
D = 002
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(c)
x1(t)x2(t)
x3(t)x4(t)
D = 004
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(d)
Figure 4 e numerical solutions of systems (81) and (82) with very low noise intensities
D = 01
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(a)
D = 02
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(b)
Figure 5 Continued
18 Journal of Mathematics
D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

1113957D1(t)
D1(t)x2(t)
x1(t)minus
y2(t)
y1(t)1113888 1113889 x1(t)gty1(t)
D1(t)y2(t)
y1(t)minus
x2(t)
x1(t)1113888 1113889 x1(t)lty1(t)
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
1113957D2(t)
D2(t)x1(t)
x2(t)minus
y1(t)
y2(t)1113888 1113889 x2(t)gty2(t)
D2(t)y1(t)
y2(t)minus
x1(t)
x2(t)1113888 1113889 x2(t)lty2(t)
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
(46)
Next we discuss 1113957D1(t) under the following three cases
(a) If x1(t)gty1(t) then
1113957D1(t)leD1(t)
x1(t)x2(t) minus y2(t)( 1113857
leDm
1m1
x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868
(47)
(b) If x1(t)lty1(t) then
1113957D1(t)leD1(t)
y1(t)y2(t) minus x2(t)( 1113857le
Dm1
m1x2(t) minus y2(t)
11138681113868111386811138681113868111386811138681113868
(48)
(c) If x1(t) y1(t) the same conclusion as (a) and (b)holds
Combining the conclusions in (a)ndash(c) we have
1113957D1(t)leDm
1m1
x2(t) minus y2(t)1113868111386811138681113868
1113868111386811138681113868 (49)
A similar argument shows that
1113957D2(t)leDm
2 (t)
mlsquo2x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868 (50)
By means of (45)ndash(50) we have
1113944
2
i1D+Vi(t)le minus a
l11 minus
am13M3
bl13 +m1( 1113857
2 minusam14M4
bl14 +m1( 1113857
2 minusDm
2m2
⎛⎝ ⎞⎠
times x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868 minus al22 minus
Dm1
m11113888 1113889 x2(t) minus y2(t)
11138681113868111386811138681113868111386811138681113868
+am13b
m13 + am
13M1
bl13 +m1( 1113857
2 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am14b
m14 + am
14M1
bl14 +m1( 1113857
2 x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868
+ dm1 u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868
(51)
Define
V31(t) lnx3(t) minus lny3(t)1113868111386811138681113868
1113868111386811138681113868 (52)
Calculating the upper right derivative of V31(t) along thesolution of system (2) it follows thatD+V31(t) sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3 t minus τ1( 1113857(1113858
minus y3 t minus τ1( 11138571113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ d2(t) u2(t) minus v2(t)( 11138571113859
sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3(t) minus y3(t)( 11138571113858
+ d2(t) u2(t) minus v2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+a33(t)1113946t
tminus τ1_x3(θ) minus _y3(θ)( 1113857dθ1113891
sgn x3(t) minus y3(t)1113864 1113865minus a33(t) x3(t) minus y3(t)( 11138571113859
+ d2(t) u2(t) minus v2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ a33(t)1113946t
tminus τ1x3(θ)1113890 minus r3(θ) minus a33(θ)x3 θ minus τ1( 11138571113888
+a31(θ)x1 θ minus τ2( 1113857
b13(θ) + x1 θ minus τ2( 1113857+ d2(θ)u2(θ)1113891
minus y3(θ)1113890 minus r3(θ) minus a33(θ)y3 θ minus τ1( 1113857
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)11138911113889dθ1113891
sgn x3(t) minus y3(t)1113864 1113865 minus a33(t) x3(t) minus y3(t)( 11138571113858
+ d2(t) u2(t) minus y2(t)( 1113857
+a31(t)b13(t) x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857( 1113857
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
+ a33(t)1113946t
tminus τ1x3(θ) minus y3(θ)( 1113857(
times 1113890 minus r3(θ) minus a33(θ)y3 θ minus τ1( 1113857
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
Journal of Mathematics 9
+ x3(θ)1113890 minus a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 1113857( 1113857
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857( 1113857
+ d2(θ) u2(θ) minus v2(θ)( 111385711138591113857dθ⎤⎦
le minus a33(t) x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 + d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ a33(t)1113946t
tminus τ11113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891 x3(θ) minus y3(θ)
11138681113868111386811138681113868111386811138681113868
+ x3(θ) a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+ d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(53)
Define
V32(t) 1113946t
tminus τ11113946
t
sa33 s + τ1( 1113857 1113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
times x3(θ) minus y3(θ)1113868111386811138681113868
1113868111386811138681113868
+ x3(θ)1113890a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
1113868111386811138681113868⎤⎦⎞⎠dθ ds
(54)
From (53) and (54) we have
1113944
2
i1D+V3i(t)le minus a33(t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+ d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ1a33 s + τ1( 1113857ds1113890r3(t) + a33(t)y3 t minus τ1( 1113857
+a31(t)y1 t minus τ2( 1113857
b13(t) + y1 t minus τ2( 1113857+ d2(t)v2(t)1113891
times x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 +M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
times a33(t) x3 t minus τ1( 1113857 minus y3 t minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
timesa31(t)
b13(t) + x1 t minus τ2( 1113857x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds times d2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(55)
We also define
V33(t) 1113946t
tminus τ2
a31 w + τ2( 1113857b13 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)( 1113857 b13 w + τ2( 1113857 + y1(w)( 1113857
timesx1(w) minus y1(w)|dw
+M3 1113946t
tminus τ11113946
w+τ1
wa33 s + τ1( 1113857a33 w + τ1( 1113857
times x3(w) minus y3(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M3 1113946t
tminus τ21113946
w+τ2
w+τ2minus τ1a33 s + τ1( 1113857
a31 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(56)
10 Journal of Mathematics
and let
V3(t) V31(t) + V32(t) + V33(t) (57)
According to (55) and (56) calculating the upper rightderivative of V3(t) we have
D+V3(t)le minus a
l33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+dm2 N21113889 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds
minus M3am33 1113946
t+τ1
ta
m33 s + τ1( 1113857ds1113891 x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3am31
bl13 +m1
⎡⎣
times1113946t+τ2
t+τ2minus τ1a
m33 s + τ1( 1113857ds1113891 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm2 +M3d
m2 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds1113890 1113891
times u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
le minus al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+ dm2 N21113857a
m33τ1 minus M3 a
m33( 1113857
2τ11113961 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3a
m31a
m33τ1
bl13 +m1
⎛⎝ ⎞⎠ x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868
+ dm2 +M3d
m2 a
m33τ1( 1113857 u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(58)
Similarly we define
V41(t) lnx4(t) minus lny4(t)1113868111386811138681113868
1113868111386811138681113868 (59)
Calculating the upper right derivative of V41(t) along thesolution of system (2) we get
D+V41(t) sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4 t minus τ3( 1113857(1113858
minus y4 t minus τ3( 11138571113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+d3(t) u3(t) minus v3(t)( 11138571113859
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+a44(t)1113946t
tminus τ3_x4(θ) minus _y4(θ)( 1113857dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus r4(θ) minus a44(θ)x4 θ minus τ3( 11138571113858(
+a41(θ)x1 θ minus τ4( 1113857
b14(θ) + x1 θ minus τ4( 1113857+ d3(θ)u3(θ)1113891
minus y4(θ) minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)11138911113889dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t) minus y4(t)( 11138571113858
+ d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus y4(θ)( 1113857
times minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)1113891
+ x4(θ) minus a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 1113857( 11138571113858
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857( 1113857
+d3(θ) u3(θ) minus v3(θ)( 111385711138591113857dθ1113859
le minus a44(t) x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 + d3(t) u3(t) minus v3(t)1113868111386811138681113868
1113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ a44(t)1113946t
tminus τ3r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+ d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(60)
Journal of Mathematics 11
We define
V42(t) 1113946t
tminus τ31113946
t
sa44 s + τ3( 1113857 r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ ds
(61)
By (60) and (61) we have
1113944
2
i1D+V4i(t)le minus a44(t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868 + d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ3a44 s + τ3( 1113857ds times 1113890r4(t) + a44(t)y4 t minus τ3( 1113857
+a41(t)y1 t minus τ4( 1113857
b14(t) + y1 t minus τ4( 1113857+ d3(t)v3(t)1113891
times x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 +M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
times a44(t) x4 t minus τ3( 1113857 minus y4 t minus τ3( 11138571113868111386811138681113868
1113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
timesa41(t)
b14(t) + x1 t minus τ4( 1113857x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds times d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(62)
Let
V4(t) V41(t) + V42(t) + V43(t) (63)
where
V43(t) 1113946t
tminus τ4
a41 w + τ4( 1113857b14 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)( 1113857 b14 w + τ4( 1113857 + y1(w)( 1113857
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868dw
+M4 1113946t
tminus τ31113946
w+τ3
wa44 s + τ3( 1113857a44 w + τ3( 1113857
times x4(w) minus y4(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M4 1113946t
tminus τ41113946
w+τ4
w+τ4minus τ3a44 s + τ3( 1113857
a41 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(64)
By (62) and (64) we have
D+V4(t)le minus a
l44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113890 11138911113888
times 1113946t
tminus τ3a
m44 s + τ3( 1113857ds
minus M4am44 1113946
t+τ3
ta
m44 s + τ3( 1113857ds1113889 x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+am41b
m14
bl14 +m1( 1113857
2 +M4am41
bl14 +m1
⎛⎝
times1113946t+τ4
t+τ4 minus τ3a
m44 s + τ3( 1113857ds1113889 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm3 +M4d
m3 1113946
t
tminus τ3a
m44 s + τ3( 1113857ds1113888 1113889 u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(65)
Moreover define V5(t) V6(t) andV7(t) by
V5(t) ln u1(t) minus ln v1(t)1113868111386811138681113868
1113868111386811138681113868
V6(t) ln u2(t) minus ln v2(t)1113868111386811138681113868
1113868111386811138681113868
V7(t) ln u3(t) minus ln v3(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
(66)
Calculating the upper right derivative of V5(t) V6(t)and V7(t) along the solutions of system (2) it holds that
D+V5(t)le sgn u1(t) minus v1(t)( 1113857 minus f1(t) u1(t)(1113858
minus v1(t)1113857 + q1(t) x1(t) minus y1(t)( 11138571113859
le minus fl1(t) u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868 + q
m1 (t) x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
(67)
D+V6(t)le sgn u2(t) minus v2(t)( 1113857 minus f2(t) u2(t)(1113858
minus v2(t)1113857 minus q2(t) x3(t) minus y3(t)( 11138571113859
le minus fl2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
+ qm2 (t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
(68)
12 Journal of Mathematics
D+V7(t)le sgn u3(t) minus v3(t)( 1113857 minus f3(t) u3(t)(1113858
minus v3(t)1113857 minus q3(t) x4(t) minus y4(t)( 11138571113859
le minus fl3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+ qm3 (t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
(69)
Finally we define a Lyapunov function as follows
V(t) 11139447
i1Vi(t) (70)
From (51) (58) (65) and (67)ndash(69) we can get that forall tgeT + τ
D+V(t)le minus 1113944
4
i1Ai xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 minus 1113944
3
j1Bj uj(t) minus vj(t)
11138681113868111386811138681113868
11138681113868111386811138681113868
(71)
In view of conditions (H9) of eorem 2 there exists aconstant αgt 0 and Tlowast gtT + τ such that for all tgeTlowast it holdsthat
Ai ge αgt 0
Bj ge αgt 0
i 1 2 3 4 j 1 2 3
(72)
Integrating fromTlowast to t on both sides of (71) and by (72)we have
V(t) + α1113946t
Tlowast1113944
4
i1xi(s) minus yi(s)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(s) minus vj(s)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠ds
leV Tlowast
( 1113857lt +infin
(73)
erefore V(t) is bounded on [Tlowast+infin) and we have
1113946infin
Tlowast1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠dsleV(T)
αlt +infin
(74)
By (74) we also have
1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113874 1113875 isin L1(T+infin)
(75)
Applying eorem 1 we can obtain that |xi(t) minus yi(t)||uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 and their derivativesremain bounded on [Tlowast+infin) and |xi(t) minus yi(t)| and|uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 are uniformly con-tinuous on [Tlowast+infin) By Lemma 5 we can conclude that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0 i 1 2 3 4
limt⟶+infin
uj(t) minus vj(t)11138681113868111386811138681113868
11138681113868111386811138681113868 0 j 1 2 3(76)
is completes the proof and the solution of system (2)is globally attractive
Remark 3 From the result ofeorem 2 the feedback controlitems and delays have influence on the globally attractive of
system (2) namely the population densities for the system willapproach to a positive equilibrium when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H9)
Remark 4 It should not be difficult to see that the methodand skills of constructing a suitable Lyapunov function in thepaper are very different with those of [29] and the method ofconstructing Lyapunov function in [29] cannot be used inthis manuscript
4 Periodic Solution
Assuming that coefficients of system (2) are positive con-tinuous and ω minus periodic functions then system (2) ischanged to the ω minus periodic system In this section we shallobtain conditions for the existence uniqueness and stabilityof a positive periodic for system (2) by using the fixed-pointtheory and some new analysis method For convenience wegive firstly the following lemma
Lemma 6 (see [34]) Let S sub Rn be convex and compact Ifmapping T S⟶ S is continuous then there exists a fixedpoint ie there exists xlowast isin S such that T(xlowast) xlowast
Next we state and prove our main result with respect tothe periodic solution for system (2)
Theorem 3 Assume that system (2) is a ω-periodic systemand satisfies conditions (H1) minus (H9) then system (2) has apositive unique ω-periodic solution which is globally as-ymptotically stable
Proof According to the existence and uniqueness theorem ofsolutions of functional differential equations [35ndash38] we candefine a Poincare mapping T R7
+⟶ R7+ as follows
T X0( 1113857 X tω X0( 1113857 (77)
where X(tω X0) (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)) be a positive solution of system (2) with initialconditions (7) And define
S x1 x2 x3 x4 u1 u2 u3( 1113857 isin R7+
mi lexi leMi i 1 2 3 4
nj le uj leNj j 1 2 3
111386811138681113868111386811138681113868111386811138681113868
⎧⎨
⎩
⎫⎬
⎭
(78)
en it is obvious that S sub R7+ is a convex and compact set
By eorem 1 and the continuity of solution of system (2)with respect to initial conditions (7) the mappingT S⟶ S is continuous Furthermore it is not difficult toshow that system (2) has a positive unique ω minus periodicsolution which is globally asymptotic stability by usingLemma 6 and eorem 2
Remark 5 From the result of eorem 3 the feedbackcontrol items and delays have influence on the periodic ofω minus periodic system (2) at is the population densities forthe periodic system will tend to a positive ω minus periodicequilibrium when system (2) satisfies ω minus periodic initialconditions (7) and assumptions (H1) minus (H9)
Journal of Mathematics 13
5 Numerical Simulation
In this section we give some numerical simulations to illustratethe feasibility of our main results In order to facilitate theverification of eorem 3 where the system is a periodicsystem we select the periodic function as the coefficient ofsystem (2) and consider the following multidelay periodicpredator-prey model with feedback control and prey diffusion
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)minus
(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
minus (0015 + 0005 sin πt)u1(t)1113859
+(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t) (25 + 05 sin πt) minus (225 + 025 cos πt)x21113858 1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)[minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857
+(05 + 01 sin πt)u2(t)1113859
_x4(t) x4(t)[minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857
+(045 + 005 sin πt)u3(t)1113859
_u1(t) (15 + 05 cos πt) minus (16 + 04 sin πt)u1(t)
+(015 + 005 sin πt)x1(t)
_u2(t) (2 + 05 cos πt) minus (105 + 005 sin πt)u2(t)
minus (15 + 05 sin πt)x3(t)
_u3(t) (355 + 005 cos πt) minus (345 + 045 sin πt)u3(t)
minus (225 + 025 sin πt)x4(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(79)
where time delay τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 1 t isin [minus 004 0]
x2(0) 1
x3(t) sin t + 1 t isin [minus 001 0]
x4(t) sin t + 1 t isin [minus 003 0]
ui(0) 1 (i 1 2 3)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(80)
From the conditions of eorem 3 we select somespecific parameter values shown in models (79) and (80)according to the calculation Of course the choiceof parameters in the model is not unique It is not difficultto verify that system (79) satisfies the conditions of eorems1ndash3 It holds from eorems 1 and 2 that system (79) ispermanent and globally attractive By means of eorem 3system (79) has a positive unique periodic solution which isglobally asymptotic stability By using the software packageMATLAB 71 we can solve the numerical solutions of systems(79) and (80) as shown in Figures 1ndash3 Figure 1 shows that thepermanence of system (79) with initial conditions (80) andtime delay τ1 001 τ2 002 τ3 003 and τ4 004 Itis not difficult to see from Figure 2 that system (79) isglobally attractive Figure 3 shows the dynamic behavior ofsystem (79)
In general ecosystems represented by deterministicLotkandashVolterra models are not suitable for describing thereal behavior of population dynamics e feedbackcontrol variable we described above is strictly related tothe environmental noise effect It is well known that theenvironmental noise is a very important factor in mod-eling natural phenomena in ecological systems At pres-ent it is impossible to model population dynamicswithout considering the interaction between the ecolog-ical system and environmental noise always present innature In fact the environmental noise acts construc-tively producing counterintuitive effects and interestingnoise-induced phenomena such as stochastic resonancenoise-enhanced stability and resonant activation (cf[39ndash43]) In addition the study of nonlinear dynamicalsystems with external noise has found some counterin-tuitive phenomena that play a constructive role in noiseand are highly fundamental and practical interests inmany scientific fields (cf [44ndash47]) e presence of noisesources can alter the stability of the ecosystem (cf[48ndash51]) In addition this noise in general breaks thesymmetry of the ecosystem see for example [52] andmoreover it gives rise to extinction phenomena becausethe multiplicative noise has the effect of an absorbingbarrier see for example [53]
As a response to this we consider the following cor-responding stochastic predator-prey model with the mul-tiplicative noise sources
14 Journal of Mathematics
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)
minus(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
+Dξ1(t)1113859 +(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t)[(25 + 05 sin πt)
minus (225 + 025 cos πt)x2(t)1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)1113890 minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857+Dξ2(t)1113891
_x4(t) x4(t)1113890 minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857+Dξ3(t)1113891
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(81)
where ξi(t) are δ-correlated Gaussian white noise sourceswith zero mean that is langδi(t)rang 0 andlangδi(t)δi(tprime)rang Diδ(t minus tprime)δij with Di the noise intensities(here we choose all equal noise intensities that is Di D)and time delays τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 05 t isin [minus 004 0]
x2(0) 05
x3(t) sin t + 05 t isin [minus 001 0]
x4(t) sin t + 05 t isin [minus 003 0]
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(82)
x1(t)x2(t)
x3(t)x4(t)
04
05
06
07
08
09
1
11
12
13
5 10 15 20 25 30 35 40 45 500t
(a)
u1(t)u2(t)u3(t)
07
08
09
1
11
12
13
14
15
16
5 10 15 20 25 30 35 40 45 500t
(b)
Figure 1 e numerical solution of system (79) with initial condition (60) (80)
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
16
2 4 6 8 10 12 14 16 18 200t
Figure 2 Numerical solution of system (79) with different initialconditions
Journal of Mathematics 15
0
02
04
06
08
1
12
14
16x 3
(t)
02 04 06 08 1 12 14 160x2(t)
(a)
1
15
2
25
x 2(t)
05 1 15 2 250x1(t)
(b)
02
04
06
08
1
12
14
16
18
2
22
x 3(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(c)
0
02
04
06
08
1
12
14
16
x 4(t)
04 06 08 1 12 14 160 02x2(t)
(d)
02
04
06
08
1
12
14
16
18
2
x 4(t)
04 06 08 1 12 14 16 18 202x3(t)
(e)
02
04
06
08
1
12
14
16
18
2
22
x 4(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(f )
Figure 3 Continued
16 Journal of Mathematics
005
115
2
005
115
2
x2(t)x3 (t)
0
05
1
15
2
x 4(t)
(g)
051
152
25
115
225
x1(t)x2 (t)
0
05
1
15
2
25
x 3(t)
(h)
051
152
25
115
2250
05
1
15
2
25
x 4(t)
x1(t)x2 (t)
(i)
x1(t)x3 (t)
051
152
005
115
20
05
1
15
2
x 4(t)
(j)
Figure 3 Dynamic behavior of system (79)
D = 0005
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(a)
D = 001
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(b)
Figure 4 Continued
Journal of Mathematics 17
D = 002
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(c)
x1(t)x2(t)
x3(t)x4(t)
D = 004
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(d)
Figure 4 e numerical solutions of systems (81) and (82) with very low noise intensities
D = 01
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(a)
D = 02
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(b)
Figure 5 Continued
18 Journal of Mathematics
D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

+ x3(θ)1113890 minus a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 1113857( 1113857
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857( 1113857
+ d2(θ) u2(θ) minus v2(θ)( 111385711138591113857dθ⎤⎦
le minus a33(t) x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 + d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ a33(t)1113946t
tminus τ11113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891 x3(θ) minus y3(θ)
11138681113868111386811138681113868111386811138681113868
+ x3(θ) a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+ d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(53)
Define
V32(t) 1113946t
tminus τ11113946
t
sa33 s + τ1( 1113857 1113890r3(θ) + a33(θ)y3 θ minus τ1( 11138571113888
+a31(θ)y1 θ minus τ2( 1113857
b13(θ) + y1 θ minus τ2( 1113857+ d2(θ)v2(θ)1113891
times x3(θ) minus y3(θ)1113868111386811138681113868
1113868111386811138681113868
+ x3(θ)1113890a33(θ) x3 θ minus τ1( 1113857 minus y3 θ minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+a31(θ)
b13(θ) + x1 θ minus τ2( 1113857x1 θ minus τ2( 1113857 minus y1 θ minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+d2(θ) u2(θ) minus v2(θ)1113868111386811138681113868
1113868111386811138681113868⎤⎦⎞⎠dθ ds
(54)
From (53) and (54) we have
1113944
2
i1D+V3i(t)le minus a33(t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+ d2(t) u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
+a31(t)b13(t)
b13(t) + x1 t minus τ2( 1113857( 1113857 b13(t) + y1 t minus τ2( 1113857( 1113857
times x1 t minus τ2( 1113857 minus y1 t minus τ2( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ1a33 s + τ1( 1113857ds1113890r3(t) + a33(t)y3 t minus τ1( 1113857
+a31(t)y1 t minus τ2( 1113857
b13(t) + y1 t minus τ2( 1113857+ d2(t)v2(t)1113891
times x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868 +M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
times a33(t) x3 t minus τ1( 1113857 minus y3 t minus τ1( 11138571113868111386811138681113868
1113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds
timesa31(t)
b13(t) + x1 t minus τ2( 1113857x1 t minus τ2( 1113857 minus y1 t minus τ2( 1113857
11138681113868111386811138681113868111386811138681113868
+M3 1113946t
tminus τ1a33 s + τ1( 1113857ds times d2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(55)
We also define
V33(t) 1113946t
tminus τ2
a31 w + τ2( 1113857b13 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)( 1113857 b13 w + τ2( 1113857 + y1(w)( 1113857
timesx1(w) minus y1(w)|dw
+M3 1113946t
tminus τ11113946
w+τ1
wa33 s + τ1( 1113857a33 w + τ1( 1113857
times x3(w) minus y3(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M3 1113946t
tminus τ21113946
w+τ2
w+τ2minus τ1a33 s + τ1( 1113857
a31 w + τ2( 1113857
b13 w + τ2( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(56)
10 Journal of Mathematics
and let
V3(t) V31(t) + V32(t) + V33(t) (57)
According to (55) and (56) calculating the upper rightderivative of V3(t) we have
D+V3(t)le minus a
l33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+dm2 N21113889 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds
minus M3am33 1113946
t+τ1
ta
m33 s + τ1( 1113857ds1113891 x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3am31
bl13 +m1
⎡⎣
times1113946t+τ2
t+τ2minus τ1a
m33 s + τ1( 1113857ds1113891 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm2 +M3d
m2 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds1113890 1113891
times u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
le minus al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+ dm2 N21113857a
m33τ1 minus M3 a
m33( 1113857
2τ11113961 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3a
m31a
m33τ1
bl13 +m1
⎛⎝ ⎞⎠ x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868
+ dm2 +M3d
m2 a
m33τ1( 1113857 u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(58)
Similarly we define
V41(t) lnx4(t) minus lny4(t)1113868111386811138681113868
1113868111386811138681113868 (59)
Calculating the upper right derivative of V41(t) along thesolution of system (2) we get
D+V41(t) sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4 t minus τ3( 1113857(1113858
minus y4 t minus τ3( 11138571113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+d3(t) u3(t) minus v3(t)( 11138571113859
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+a44(t)1113946t
tminus τ3_x4(θ) minus _y4(θ)( 1113857dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus r4(θ) minus a44(θ)x4 θ minus τ3( 11138571113858(
+a41(θ)x1 θ minus τ4( 1113857
b14(θ) + x1 θ minus τ4( 1113857+ d3(θ)u3(θ)1113891
minus y4(θ) minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)11138911113889dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t) minus y4(t)( 11138571113858
+ d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus y4(θ)( 1113857
times minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)1113891
+ x4(θ) minus a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 1113857( 11138571113858
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857( 1113857
+d3(θ) u3(θ) minus v3(θ)( 111385711138591113857dθ1113859
le minus a44(t) x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 + d3(t) u3(t) minus v3(t)1113868111386811138681113868
1113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ a44(t)1113946t
tminus τ3r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+ d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(60)
Journal of Mathematics 11
We define
V42(t) 1113946t
tminus τ31113946
t
sa44 s + τ3( 1113857 r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ ds
(61)
By (60) and (61) we have
1113944
2
i1D+V4i(t)le minus a44(t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868 + d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ3a44 s + τ3( 1113857ds times 1113890r4(t) + a44(t)y4 t minus τ3( 1113857
+a41(t)y1 t minus τ4( 1113857
b14(t) + y1 t minus τ4( 1113857+ d3(t)v3(t)1113891
times x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 +M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
times a44(t) x4 t minus τ3( 1113857 minus y4 t minus τ3( 11138571113868111386811138681113868
1113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
timesa41(t)
b14(t) + x1 t minus τ4( 1113857x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds times d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(62)
Let
V4(t) V41(t) + V42(t) + V43(t) (63)
where
V43(t) 1113946t
tminus τ4
a41 w + τ4( 1113857b14 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)( 1113857 b14 w + τ4( 1113857 + y1(w)( 1113857
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868dw
+M4 1113946t
tminus τ31113946
w+τ3
wa44 s + τ3( 1113857a44 w + τ3( 1113857
times x4(w) minus y4(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M4 1113946t
tminus τ41113946
w+τ4
w+τ4minus τ3a44 s + τ3( 1113857
a41 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(64)
By (62) and (64) we have
D+V4(t)le minus a
l44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113890 11138911113888
times 1113946t
tminus τ3a
m44 s + τ3( 1113857ds
minus M4am44 1113946
t+τ3
ta
m44 s + τ3( 1113857ds1113889 x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+am41b
m14
bl14 +m1( 1113857
2 +M4am41
bl14 +m1
⎛⎝
times1113946t+τ4
t+τ4 minus τ3a
m44 s + τ3( 1113857ds1113889 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm3 +M4d
m3 1113946
t
tminus τ3a
m44 s + τ3( 1113857ds1113888 1113889 u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(65)
Moreover define V5(t) V6(t) andV7(t) by
V5(t) ln u1(t) minus ln v1(t)1113868111386811138681113868
1113868111386811138681113868
V6(t) ln u2(t) minus ln v2(t)1113868111386811138681113868
1113868111386811138681113868
V7(t) ln u3(t) minus ln v3(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
(66)
Calculating the upper right derivative of V5(t) V6(t)and V7(t) along the solutions of system (2) it holds that
D+V5(t)le sgn u1(t) minus v1(t)( 1113857 minus f1(t) u1(t)(1113858
minus v1(t)1113857 + q1(t) x1(t) minus y1(t)( 11138571113859
le minus fl1(t) u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868 + q
m1 (t) x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
(67)
D+V6(t)le sgn u2(t) minus v2(t)( 1113857 minus f2(t) u2(t)(1113858
minus v2(t)1113857 minus q2(t) x3(t) minus y3(t)( 11138571113859
le minus fl2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
+ qm2 (t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
(68)
12 Journal of Mathematics
D+V7(t)le sgn u3(t) minus v3(t)( 1113857 minus f3(t) u3(t)(1113858
minus v3(t)1113857 minus q3(t) x4(t) minus y4(t)( 11138571113859
le minus fl3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+ qm3 (t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
(69)
Finally we define a Lyapunov function as follows
V(t) 11139447
i1Vi(t) (70)
From (51) (58) (65) and (67)ndash(69) we can get that forall tgeT + τ
D+V(t)le minus 1113944
4
i1Ai xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 minus 1113944
3
j1Bj uj(t) minus vj(t)
11138681113868111386811138681113868
11138681113868111386811138681113868
(71)
In view of conditions (H9) of eorem 2 there exists aconstant αgt 0 and Tlowast gtT + τ such that for all tgeTlowast it holdsthat
Ai ge αgt 0
Bj ge αgt 0
i 1 2 3 4 j 1 2 3
(72)
Integrating fromTlowast to t on both sides of (71) and by (72)we have
V(t) + α1113946t
Tlowast1113944
4
i1xi(s) minus yi(s)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(s) minus vj(s)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠ds
leV Tlowast
( 1113857lt +infin
(73)
erefore V(t) is bounded on [Tlowast+infin) and we have
1113946infin
Tlowast1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠dsleV(T)
αlt +infin
(74)
By (74) we also have
1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113874 1113875 isin L1(T+infin)
(75)
Applying eorem 1 we can obtain that |xi(t) minus yi(t)||uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 and their derivativesremain bounded on [Tlowast+infin) and |xi(t) minus yi(t)| and|uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 are uniformly con-tinuous on [Tlowast+infin) By Lemma 5 we can conclude that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0 i 1 2 3 4
limt⟶+infin
uj(t) minus vj(t)11138681113868111386811138681113868
11138681113868111386811138681113868 0 j 1 2 3(76)
is completes the proof and the solution of system (2)is globally attractive
Remark 3 From the result ofeorem 2 the feedback controlitems and delays have influence on the globally attractive of
system (2) namely the population densities for the system willapproach to a positive equilibrium when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H9)
Remark 4 It should not be difficult to see that the methodand skills of constructing a suitable Lyapunov function in thepaper are very different with those of [29] and the method ofconstructing Lyapunov function in [29] cannot be used inthis manuscript
4 Periodic Solution
Assuming that coefficients of system (2) are positive con-tinuous and ω minus periodic functions then system (2) ischanged to the ω minus periodic system In this section we shallobtain conditions for the existence uniqueness and stabilityof a positive periodic for system (2) by using the fixed-pointtheory and some new analysis method For convenience wegive firstly the following lemma
Lemma 6 (see [34]) Let S sub Rn be convex and compact Ifmapping T S⟶ S is continuous then there exists a fixedpoint ie there exists xlowast isin S such that T(xlowast) xlowast
Next we state and prove our main result with respect tothe periodic solution for system (2)
Theorem 3 Assume that system (2) is a ω-periodic systemand satisfies conditions (H1) minus (H9) then system (2) has apositive unique ω-periodic solution which is globally as-ymptotically stable
Proof According to the existence and uniqueness theorem ofsolutions of functional differential equations [35ndash38] we candefine a Poincare mapping T R7
+⟶ R7+ as follows
T X0( 1113857 X tω X0( 1113857 (77)
where X(tω X0) (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)) be a positive solution of system (2) with initialconditions (7) And define
S x1 x2 x3 x4 u1 u2 u3( 1113857 isin R7+
mi lexi leMi i 1 2 3 4
nj le uj leNj j 1 2 3
111386811138681113868111386811138681113868111386811138681113868
⎧⎨
⎩
⎫⎬
⎭
(78)
en it is obvious that S sub R7+ is a convex and compact set
By eorem 1 and the continuity of solution of system (2)with respect to initial conditions (7) the mappingT S⟶ S is continuous Furthermore it is not difficult toshow that system (2) has a positive unique ω minus periodicsolution which is globally asymptotic stability by usingLemma 6 and eorem 2
Remark 5 From the result of eorem 3 the feedbackcontrol items and delays have influence on the periodic ofω minus periodic system (2) at is the population densities forthe periodic system will tend to a positive ω minus periodicequilibrium when system (2) satisfies ω minus periodic initialconditions (7) and assumptions (H1) minus (H9)
Journal of Mathematics 13
5 Numerical Simulation
In this section we give some numerical simulations to illustratethe feasibility of our main results In order to facilitate theverification of eorem 3 where the system is a periodicsystem we select the periodic function as the coefficient ofsystem (2) and consider the following multidelay periodicpredator-prey model with feedback control and prey diffusion
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)minus
(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
minus (0015 + 0005 sin πt)u1(t)1113859
+(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t) (25 + 05 sin πt) minus (225 + 025 cos πt)x21113858 1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)[minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857
+(05 + 01 sin πt)u2(t)1113859
_x4(t) x4(t)[minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857
+(045 + 005 sin πt)u3(t)1113859
_u1(t) (15 + 05 cos πt) minus (16 + 04 sin πt)u1(t)
+(015 + 005 sin πt)x1(t)
_u2(t) (2 + 05 cos πt) minus (105 + 005 sin πt)u2(t)
minus (15 + 05 sin πt)x3(t)
_u3(t) (355 + 005 cos πt) minus (345 + 045 sin πt)u3(t)
minus (225 + 025 sin πt)x4(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(79)
where time delay τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 1 t isin [minus 004 0]
x2(0) 1
x3(t) sin t + 1 t isin [minus 001 0]
x4(t) sin t + 1 t isin [minus 003 0]
ui(0) 1 (i 1 2 3)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(80)
From the conditions of eorem 3 we select somespecific parameter values shown in models (79) and (80)according to the calculation Of course the choiceof parameters in the model is not unique It is not difficultto verify that system (79) satisfies the conditions of eorems1ndash3 It holds from eorems 1 and 2 that system (79) ispermanent and globally attractive By means of eorem 3system (79) has a positive unique periodic solution which isglobally asymptotic stability By using the software packageMATLAB 71 we can solve the numerical solutions of systems(79) and (80) as shown in Figures 1ndash3 Figure 1 shows that thepermanence of system (79) with initial conditions (80) andtime delay τ1 001 τ2 002 τ3 003 and τ4 004 Itis not difficult to see from Figure 2 that system (79) isglobally attractive Figure 3 shows the dynamic behavior ofsystem (79)
In general ecosystems represented by deterministicLotkandashVolterra models are not suitable for describing thereal behavior of population dynamics e feedbackcontrol variable we described above is strictly related tothe environmental noise effect It is well known that theenvironmental noise is a very important factor in mod-eling natural phenomena in ecological systems At pres-ent it is impossible to model population dynamicswithout considering the interaction between the ecolog-ical system and environmental noise always present innature In fact the environmental noise acts construc-tively producing counterintuitive effects and interestingnoise-induced phenomena such as stochastic resonancenoise-enhanced stability and resonant activation (cf[39ndash43]) In addition the study of nonlinear dynamicalsystems with external noise has found some counterin-tuitive phenomena that play a constructive role in noiseand are highly fundamental and practical interests inmany scientific fields (cf [44ndash47]) e presence of noisesources can alter the stability of the ecosystem (cf[48ndash51]) In addition this noise in general breaks thesymmetry of the ecosystem see for example [52] andmoreover it gives rise to extinction phenomena becausethe multiplicative noise has the effect of an absorbingbarrier see for example [53]
As a response to this we consider the following cor-responding stochastic predator-prey model with the mul-tiplicative noise sources
14 Journal of Mathematics
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)
minus(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
+Dξ1(t)1113859 +(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t)[(25 + 05 sin πt)
minus (225 + 025 cos πt)x2(t)1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)1113890 minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857+Dξ2(t)1113891
_x4(t) x4(t)1113890 minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857+Dξ3(t)1113891
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(81)
where ξi(t) are δ-correlated Gaussian white noise sourceswith zero mean that is langδi(t)rang 0 andlangδi(t)δi(tprime)rang Diδ(t minus tprime)δij with Di the noise intensities(here we choose all equal noise intensities that is Di D)and time delays τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 05 t isin [minus 004 0]
x2(0) 05
x3(t) sin t + 05 t isin [minus 001 0]
x4(t) sin t + 05 t isin [minus 003 0]
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(82)
x1(t)x2(t)
x3(t)x4(t)
04
05
06
07
08
09
1
11
12
13
5 10 15 20 25 30 35 40 45 500t
(a)
u1(t)u2(t)u3(t)
07
08
09
1
11
12
13
14
15
16
5 10 15 20 25 30 35 40 45 500t
(b)
Figure 1 e numerical solution of system (79) with initial condition (60) (80)
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
16
2 4 6 8 10 12 14 16 18 200t
Figure 2 Numerical solution of system (79) with different initialconditions
Journal of Mathematics 15
0
02
04
06
08
1
12
14
16x 3
(t)
02 04 06 08 1 12 14 160x2(t)
(a)
1
15
2
25
x 2(t)
05 1 15 2 250x1(t)
(b)
02
04
06
08
1
12
14
16
18
2
22
x 3(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(c)
0
02
04
06
08
1
12
14
16
x 4(t)
04 06 08 1 12 14 160 02x2(t)
(d)
02
04
06
08
1
12
14
16
18
2
x 4(t)
04 06 08 1 12 14 16 18 202x3(t)
(e)
02
04
06
08
1
12
14
16
18
2
22
x 4(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(f )
Figure 3 Continued
16 Journal of Mathematics
005
115
2
005
115
2
x2(t)x3 (t)
0
05
1
15
2
x 4(t)
(g)
051
152
25
115
225
x1(t)x2 (t)
0
05
1
15
2
25
x 3(t)
(h)
051
152
25
115
2250
05
1
15
2
25
x 4(t)
x1(t)x2 (t)
(i)
x1(t)x3 (t)
051
152
005
115
20
05
1
15
2
x 4(t)
(j)
Figure 3 Dynamic behavior of system (79)
D = 0005
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(a)
D = 001
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(b)
Figure 4 Continued
Journal of Mathematics 17
D = 002
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(c)
x1(t)x2(t)
x3(t)x4(t)
D = 004
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(d)
Figure 4 e numerical solutions of systems (81) and (82) with very low noise intensities
D = 01
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(a)
D = 02
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(b)
Figure 5 Continued
18 Journal of Mathematics
D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

and let
V3(t) V31(t) + V32(t) + V33(t) (57)
According to (55) and (56) calculating the upper rightderivative of V3(t) we have
D+V3(t)le minus a
l33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+dm2 N21113889 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds
minus M3am33 1113946
t+τ1
ta
m33 s + τ1( 1113857ds1113891 x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3am31
bl13 +m1
⎡⎣
times1113946t+τ2
t+τ2minus τ1a
m33 s + τ1( 1113857ds1113891 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm2 +M3d
m2 1113946
t
tminus τ1a
m33 s + τ1( 1113857ds1113890 1113891
times u2(t) minus v2(t)1113868111386811138681113868
1113868111386811138681113868
le minus al33 minus r
m3 + a
m33M3 +
am31M1
bl13 +M1
11138881113890
+ dm2 N21113857a
m33τ1 minus M3 a
m33( 1113857
2τ11113961 x3(t) minus y3(t)1113868111386811138681113868
1113868111386811138681113868
+am31b
m13
bl13 +m1( 1113857
2 +M3a
m31a
m33τ1
bl13 +m1
⎛⎝ ⎞⎠ x1(t) minus y1(t)1113868111386811138681113868
1113868111386811138681113868
+ dm2 +M3d
m2 a
m33τ1( 1113857 u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
(58)
Similarly we define
V41(t) lnx4(t) minus lny4(t)1113868111386811138681113868
1113868111386811138681113868 (59)
Calculating the upper right derivative of V41(t) along thesolution of system (2) we get
D+V41(t) sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4 t minus τ3( 1113857(1113858
minus y4 t minus τ3( 11138571113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+d3(t) u3(t) minus v3(t)( 11138571113859
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+a44(t)1113946t
tminus τ3_x4(θ) minus _y4(θ)( 1113857dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t)(1113858
minus y4(t)1113857 + d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus r4(θ) minus a44(θ)x4 θ minus τ3( 11138571113858(
+a41(θ)x1 θ minus τ4( 1113857
b14(θ) + x1 θ minus τ4( 1113857+ d3(θ)u3(θ)1113891
minus y4(θ) minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)11138911113889dθ1113891
sgn x4(t) minus y4(t)1113864 1113865 minus a44(t) x4(t) minus y4(t)( 11138571113858
+ d3(t) u3(t) minus v3(t)( 1113857
+a41(t)b14(t) x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857( 1113857
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
+ a44(t)1113946t
tminus τ3x4(θ) minus y4(θ)( 1113857
times minus r4(θ) minus a44(θ)y4 θ minus τ3( 11138571113858
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857+ d3(θ)v3(θ)1113891
+ x4(θ) minus a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 1113857( 11138571113858
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857( 1113857
+d3(θ) u3(θ) minus v3(θ)( 111385711138591113857dθ1113859
le minus a44(t) x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 + d3(t) u3(t) minus v3(t)1113868111386811138681113868
1113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ a44(t)1113946t
tminus τ3r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+ d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ
(60)
Journal of Mathematics 11
We define
V42(t) 1113946t
tminus τ31113946
t
sa44 s + τ3( 1113857 r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ ds
(61)
By (60) and (61) we have
1113944
2
i1D+V4i(t)le minus a44(t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868 + d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ3a44 s + τ3( 1113857ds times 1113890r4(t) + a44(t)y4 t minus τ3( 1113857
+a41(t)y1 t minus τ4( 1113857
b14(t) + y1 t minus τ4( 1113857+ d3(t)v3(t)1113891
times x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 +M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
times a44(t) x4 t minus τ3( 1113857 minus y4 t minus τ3( 11138571113868111386811138681113868
1113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
timesa41(t)
b14(t) + x1 t minus τ4( 1113857x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds times d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(62)
Let
V4(t) V41(t) + V42(t) + V43(t) (63)
where
V43(t) 1113946t
tminus τ4
a41 w + τ4( 1113857b14 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)( 1113857 b14 w + τ4( 1113857 + y1(w)( 1113857
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868dw
+M4 1113946t
tminus τ31113946
w+τ3
wa44 s + τ3( 1113857a44 w + τ3( 1113857
times x4(w) minus y4(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M4 1113946t
tminus τ41113946
w+τ4
w+τ4minus τ3a44 s + τ3( 1113857
a41 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(64)
By (62) and (64) we have
D+V4(t)le minus a
l44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113890 11138911113888
times 1113946t
tminus τ3a
m44 s + τ3( 1113857ds
minus M4am44 1113946
t+τ3
ta
m44 s + τ3( 1113857ds1113889 x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+am41b
m14
bl14 +m1( 1113857
2 +M4am41
bl14 +m1
⎛⎝
times1113946t+τ4
t+τ4 minus τ3a
m44 s + τ3( 1113857ds1113889 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm3 +M4d
m3 1113946
t
tminus τ3a
m44 s + τ3( 1113857ds1113888 1113889 u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(65)
Moreover define V5(t) V6(t) andV7(t) by
V5(t) ln u1(t) minus ln v1(t)1113868111386811138681113868
1113868111386811138681113868
V6(t) ln u2(t) minus ln v2(t)1113868111386811138681113868
1113868111386811138681113868
V7(t) ln u3(t) minus ln v3(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
(66)
Calculating the upper right derivative of V5(t) V6(t)and V7(t) along the solutions of system (2) it holds that
D+V5(t)le sgn u1(t) minus v1(t)( 1113857 minus f1(t) u1(t)(1113858
minus v1(t)1113857 + q1(t) x1(t) minus y1(t)( 11138571113859
le minus fl1(t) u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868 + q
m1 (t) x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
(67)
D+V6(t)le sgn u2(t) minus v2(t)( 1113857 minus f2(t) u2(t)(1113858
minus v2(t)1113857 minus q2(t) x3(t) minus y3(t)( 11138571113859
le minus fl2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
+ qm2 (t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
(68)
12 Journal of Mathematics
D+V7(t)le sgn u3(t) minus v3(t)( 1113857 minus f3(t) u3(t)(1113858
minus v3(t)1113857 minus q3(t) x4(t) minus y4(t)( 11138571113859
le minus fl3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+ qm3 (t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
(69)
Finally we define a Lyapunov function as follows
V(t) 11139447
i1Vi(t) (70)
From (51) (58) (65) and (67)ndash(69) we can get that forall tgeT + τ
D+V(t)le minus 1113944
4
i1Ai xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 minus 1113944
3
j1Bj uj(t) minus vj(t)
11138681113868111386811138681113868
11138681113868111386811138681113868
(71)
In view of conditions (H9) of eorem 2 there exists aconstant αgt 0 and Tlowast gtT + τ such that for all tgeTlowast it holdsthat
Ai ge αgt 0
Bj ge αgt 0
i 1 2 3 4 j 1 2 3
(72)
Integrating fromTlowast to t on both sides of (71) and by (72)we have
V(t) + α1113946t
Tlowast1113944
4
i1xi(s) minus yi(s)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(s) minus vj(s)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠ds
leV Tlowast
( 1113857lt +infin
(73)
erefore V(t) is bounded on [Tlowast+infin) and we have
1113946infin
Tlowast1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠dsleV(T)
αlt +infin
(74)
By (74) we also have
1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113874 1113875 isin L1(T+infin)
(75)
Applying eorem 1 we can obtain that |xi(t) minus yi(t)||uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 and their derivativesremain bounded on [Tlowast+infin) and |xi(t) minus yi(t)| and|uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 are uniformly con-tinuous on [Tlowast+infin) By Lemma 5 we can conclude that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0 i 1 2 3 4
limt⟶+infin
uj(t) minus vj(t)11138681113868111386811138681113868
11138681113868111386811138681113868 0 j 1 2 3(76)
is completes the proof and the solution of system (2)is globally attractive
Remark 3 From the result ofeorem 2 the feedback controlitems and delays have influence on the globally attractive of
system (2) namely the population densities for the system willapproach to a positive equilibrium when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H9)
Remark 4 It should not be difficult to see that the methodand skills of constructing a suitable Lyapunov function in thepaper are very different with those of [29] and the method ofconstructing Lyapunov function in [29] cannot be used inthis manuscript
4 Periodic Solution
Assuming that coefficients of system (2) are positive con-tinuous and ω minus periodic functions then system (2) ischanged to the ω minus periodic system In this section we shallobtain conditions for the existence uniqueness and stabilityof a positive periodic for system (2) by using the fixed-pointtheory and some new analysis method For convenience wegive firstly the following lemma
Lemma 6 (see [34]) Let S sub Rn be convex and compact Ifmapping T S⟶ S is continuous then there exists a fixedpoint ie there exists xlowast isin S such that T(xlowast) xlowast
Next we state and prove our main result with respect tothe periodic solution for system (2)
Theorem 3 Assume that system (2) is a ω-periodic systemand satisfies conditions (H1) minus (H9) then system (2) has apositive unique ω-periodic solution which is globally as-ymptotically stable
Proof According to the existence and uniqueness theorem ofsolutions of functional differential equations [35ndash38] we candefine a Poincare mapping T R7
+⟶ R7+ as follows
T X0( 1113857 X tω X0( 1113857 (77)
where X(tω X0) (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)) be a positive solution of system (2) with initialconditions (7) And define
S x1 x2 x3 x4 u1 u2 u3( 1113857 isin R7+
mi lexi leMi i 1 2 3 4
nj le uj leNj j 1 2 3
111386811138681113868111386811138681113868111386811138681113868
⎧⎨
⎩
⎫⎬
⎭
(78)
en it is obvious that S sub R7+ is a convex and compact set
By eorem 1 and the continuity of solution of system (2)with respect to initial conditions (7) the mappingT S⟶ S is continuous Furthermore it is not difficult toshow that system (2) has a positive unique ω minus periodicsolution which is globally asymptotic stability by usingLemma 6 and eorem 2
Remark 5 From the result of eorem 3 the feedbackcontrol items and delays have influence on the periodic ofω minus periodic system (2) at is the population densities forthe periodic system will tend to a positive ω minus periodicequilibrium when system (2) satisfies ω minus periodic initialconditions (7) and assumptions (H1) minus (H9)
Journal of Mathematics 13
5 Numerical Simulation
In this section we give some numerical simulations to illustratethe feasibility of our main results In order to facilitate theverification of eorem 3 where the system is a periodicsystem we select the periodic function as the coefficient ofsystem (2) and consider the following multidelay periodicpredator-prey model with feedback control and prey diffusion
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)minus
(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
minus (0015 + 0005 sin πt)u1(t)1113859
+(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t) (25 + 05 sin πt) minus (225 + 025 cos πt)x21113858 1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)[minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857
+(05 + 01 sin πt)u2(t)1113859
_x4(t) x4(t)[minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857
+(045 + 005 sin πt)u3(t)1113859
_u1(t) (15 + 05 cos πt) minus (16 + 04 sin πt)u1(t)
+(015 + 005 sin πt)x1(t)
_u2(t) (2 + 05 cos πt) minus (105 + 005 sin πt)u2(t)
minus (15 + 05 sin πt)x3(t)
_u3(t) (355 + 005 cos πt) minus (345 + 045 sin πt)u3(t)
minus (225 + 025 sin πt)x4(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(79)
where time delay τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 1 t isin [minus 004 0]
x2(0) 1
x3(t) sin t + 1 t isin [minus 001 0]
x4(t) sin t + 1 t isin [minus 003 0]
ui(0) 1 (i 1 2 3)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(80)
From the conditions of eorem 3 we select somespecific parameter values shown in models (79) and (80)according to the calculation Of course the choiceof parameters in the model is not unique It is not difficultto verify that system (79) satisfies the conditions of eorems1ndash3 It holds from eorems 1 and 2 that system (79) ispermanent and globally attractive By means of eorem 3system (79) has a positive unique periodic solution which isglobally asymptotic stability By using the software packageMATLAB 71 we can solve the numerical solutions of systems(79) and (80) as shown in Figures 1ndash3 Figure 1 shows that thepermanence of system (79) with initial conditions (80) andtime delay τ1 001 τ2 002 τ3 003 and τ4 004 Itis not difficult to see from Figure 2 that system (79) isglobally attractive Figure 3 shows the dynamic behavior ofsystem (79)
In general ecosystems represented by deterministicLotkandashVolterra models are not suitable for describing thereal behavior of population dynamics e feedbackcontrol variable we described above is strictly related tothe environmental noise effect It is well known that theenvironmental noise is a very important factor in mod-eling natural phenomena in ecological systems At pres-ent it is impossible to model population dynamicswithout considering the interaction between the ecolog-ical system and environmental noise always present innature In fact the environmental noise acts construc-tively producing counterintuitive effects and interestingnoise-induced phenomena such as stochastic resonancenoise-enhanced stability and resonant activation (cf[39ndash43]) In addition the study of nonlinear dynamicalsystems with external noise has found some counterin-tuitive phenomena that play a constructive role in noiseand are highly fundamental and practical interests inmany scientific fields (cf [44ndash47]) e presence of noisesources can alter the stability of the ecosystem (cf[48ndash51]) In addition this noise in general breaks thesymmetry of the ecosystem see for example [52] andmoreover it gives rise to extinction phenomena becausethe multiplicative noise has the effect of an absorbingbarrier see for example [53]
As a response to this we consider the following cor-responding stochastic predator-prey model with the mul-tiplicative noise sources
14 Journal of Mathematics
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)
minus(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
+Dξ1(t)1113859 +(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t)[(25 + 05 sin πt)
minus (225 + 025 cos πt)x2(t)1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)1113890 minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857+Dξ2(t)1113891
_x4(t) x4(t)1113890 minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857+Dξ3(t)1113891
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(81)
where ξi(t) are δ-correlated Gaussian white noise sourceswith zero mean that is langδi(t)rang 0 andlangδi(t)δi(tprime)rang Diδ(t minus tprime)δij with Di the noise intensities(here we choose all equal noise intensities that is Di D)and time delays τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 05 t isin [minus 004 0]
x2(0) 05
x3(t) sin t + 05 t isin [minus 001 0]
x4(t) sin t + 05 t isin [minus 003 0]
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(82)
x1(t)x2(t)
x3(t)x4(t)
04
05
06
07
08
09
1
11
12
13
5 10 15 20 25 30 35 40 45 500t
(a)
u1(t)u2(t)u3(t)
07
08
09
1
11
12
13
14
15
16
5 10 15 20 25 30 35 40 45 500t
(b)
Figure 1 e numerical solution of system (79) with initial condition (60) (80)
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
16
2 4 6 8 10 12 14 16 18 200t
Figure 2 Numerical solution of system (79) with different initialconditions
Journal of Mathematics 15
0
02
04
06
08
1
12
14
16x 3
(t)
02 04 06 08 1 12 14 160x2(t)
(a)
1
15
2
25
x 2(t)
05 1 15 2 250x1(t)
(b)
02
04
06
08
1
12
14
16
18
2
22
x 3(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(c)
0
02
04
06
08
1
12
14
16
x 4(t)
04 06 08 1 12 14 160 02x2(t)
(d)
02
04
06
08
1
12
14
16
18
2
x 4(t)
04 06 08 1 12 14 16 18 202x3(t)
(e)
02
04
06
08
1
12
14
16
18
2
22
x 4(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(f )
Figure 3 Continued
16 Journal of Mathematics
005
115
2
005
115
2
x2(t)x3 (t)
0
05
1
15
2
x 4(t)
(g)
051
152
25
115
225
x1(t)x2 (t)
0
05
1
15
2
25
x 3(t)
(h)
051
152
25
115
2250
05
1
15
2
25
x 4(t)
x1(t)x2 (t)
(i)
x1(t)x3 (t)
051
152
005
115
20
05
1
15
2
x 4(t)
(j)
Figure 3 Dynamic behavior of system (79)
D = 0005
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(a)
D = 001
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(b)
Figure 4 Continued
Journal of Mathematics 17
D = 002
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(c)
x1(t)x2(t)
x3(t)x4(t)
D = 004
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(d)
Figure 4 e numerical solutions of systems (81) and (82) with very low noise intensities
D = 01
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(a)
D = 02
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(b)
Figure 5 Continued
18 Journal of Mathematics
D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

We define
V42(t) 1113946t
tminus τ31113946
t
sa44 s + τ3( 1113857 r4(θ) + a44(θ)y4 θ minus τ3( 11138571113858(
+a41(θ)y1 θ minus τ4( 1113857
b14(θ) + y1 θ minus τ4( 1113857
+ d3(θ)v3(θ)1113859 x4(θ) minus y4(θ)1113868111386811138681113868
1113868111386811138681113868
+ x4(θ) a44(θ) x4 θ minus τ3( 1113857 minus y4 θ minus τ3( 11138571113868111386811138681113868
11138681113868111386811138681113960
+a41(θ)
b14(θ) + x1 θ minus τ4( 1113857x1 θ minus τ4( 1113857 minus y1 θ minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+d3(θ) u3(θ) minus v3(θ)1113868111386811138681113868
111386811138681113868111386811139611113873dθ ds
(61)
By (60) and (61) we have
1113944
2
i1D+V4i(t)le minus a44(t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868 + d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+a41(t)b14(t)
b14(t) + x1 t minus τ4( 1113857( 1113857 b14(t) + y1 t minus τ4( 1113857( 1113857
times x1 t minus τ4( 1113857 minus y1 t minus τ4( 11138571113868111386811138681113868
1113868111386811138681113868
+ 1113946t
tminus τ3a44 s + τ3( 1113857ds times 1113890r4(t) + a44(t)y4 t minus τ3( 1113857
+a41(t)y1 t minus τ4( 1113857
b14(t) + y1 t minus τ4( 1113857+ d3(t)v3(t)1113891
times x4(t) minus y4(t)1113868111386811138681113868
1113868111386811138681113868 +M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
times a44(t) x4 t minus τ3( 1113857 minus y4 t minus τ3( 11138571113868111386811138681113868
1113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds
timesa41(t)
b14(t) + x1 t minus τ4( 1113857x1 t minus τ4( 1113857 minus y1 t minus τ4( 1113857
11138681113868111386811138681113868111386811138681113868
+M4 1113946t
tminus τ3a44 s + τ3( 1113857ds times d3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(62)
Let
V4(t) V41(t) + V42(t) + V43(t) (63)
where
V43(t) 1113946t
tminus τ4
a41 w + τ4( 1113857b14 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)( 1113857 b14 w + τ4( 1113857 + y1(w)( 1113857
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868dw
+M4 1113946t
tminus τ31113946
w+τ3
wa44 s + τ3( 1113857a44 w + τ3( 1113857
times x4(w) minus y4(w)1113868111386811138681113868
1113868111386811138681113868ds dw
+M4 1113946t
tminus τ41113946
w+τ4
w+τ4minus τ3a44 s + τ3( 1113857
a41 w + τ4( 1113857
b14 w + τ4( 1113857 + x1(w)
times x1(w) minus y1(w)1113868111386811138681113868
1113868111386811138681113868ds dw
(64)
By (62) and (64) we have
D+V4(t)le minus a
l44 minus r
m4 + a
m44M4 +
am41M1
bl14 +M1
+ dm3 N31113890 11138911113888
times 1113946t
tminus τ3a
m44 s + τ3( 1113857ds
minus M4am44 1113946
t+τ3
ta
m44 s + τ3( 1113857ds1113889 x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
+am41b
m14
bl14 +m1( 1113857
2 +M4am41
bl14 +m1
⎛⎝
times1113946t+τ4
t+τ4 minus τ3a
m44 s + τ3( 1113857ds1113889 x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
+ dm3 +M4d
m3 1113946
t
tminus τ3a
m44 s + τ3( 1113857ds1113888 1113889 u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
(65)
Moreover define V5(t) V6(t) andV7(t) by
V5(t) ln u1(t) minus ln v1(t)1113868111386811138681113868
1113868111386811138681113868
V6(t) ln u2(t) minus ln v2(t)1113868111386811138681113868
1113868111386811138681113868
V7(t) ln u3(t) minus ln v3(t)1113868111386811138681113868
1113868111386811138681113868
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
(66)
Calculating the upper right derivative of V5(t) V6(t)and V7(t) along the solutions of system (2) it holds that
D+V5(t)le sgn u1(t) minus v1(t)( 1113857 minus f1(t) u1(t)(1113858
minus v1(t)1113857 + q1(t) x1(t) minus y1(t)( 11138571113859
le minus fl1(t) u1(t) minus v1(t)
11138681113868111386811138681113868111386811138681113868 + q
m1 (t) x1(t) minus y1(t)
11138681113868111386811138681113868111386811138681113868
(67)
D+V6(t)le sgn u2(t) minus v2(t)( 1113857 minus f2(t) u2(t)(1113858
minus v2(t)1113857 minus q2(t) x3(t) minus y3(t)( 11138571113859
le minus fl2(t) u2(t) minus v2(t)
11138681113868111386811138681113868111386811138681113868
+ qm2 (t) x3(t) minus y3(t)
11138681113868111386811138681113868111386811138681113868
(68)
12 Journal of Mathematics
D+V7(t)le sgn u3(t) minus v3(t)( 1113857 minus f3(t) u3(t)(1113858
minus v3(t)1113857 minus q3(t) x4(t) minus y4(t)( 11138571113859
le minus fl3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+ qm3 (t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
(69)
Finally we define a Lyapunov function as follows
V(t) 11139447
i1Vi(t) (70)
From (51) (58) (65) and (67)ndash(69) we can get that forall tgeT + τ
D+V(t)le minus 1113944
4
i1Ai xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 minus 1113944
3
j1Bj uj(t) minus vj(t)
11138681113868111386811138681113868
11138681113868111386811138681113868
(71)
In view of conditions (H9) of eorem 2 there exists aconstant αgt 0 and Tlowast gtT + τ such that for all tgeTlowast it holdsthat
Ai ge αgt 0
Bj ge αgt 0
i 1 2 3 4 j 1 2 3
(72)
Integrating fromTlowast to t on both sides of (71) and by (72)we have
V(t) + α1113946t
Tlowast1113944
4
i1xi(s) minus yi(s)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(s) minus vj(s)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠ds
leV Tlowast
( 1113857lt +infin
(73)
erefore V(t) is bounded on [Tlowast+infin) and we have
1113946infin
Tlowast1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠dsleV(T)
αlt +infin
(74)
By (74) we also have
1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113874 1113875 isin L1(T+infin)
(75)
Applying eorem 1 we can obtain that |xi(t) minus yi(t)||uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 and their derivativesremain bounded on [Tlowast+infin) and |xi(t) minus yi(t)| and|uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 are uniformly con-tinuous on [Tlowast+infin) By Lemma 5 we can conclude that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0 i 1 2 3 4
limt⟶+infin
uj(t) minus vj(t)11138681113868111386811138681113868
11138681113868111386811138681113868 0 j 1 2 3(76)
is completes the proof and the solution of system (2)is globally attractive
Remark 3 From the result ofeorem 2 the feedback controlitems and delays have influence on the globally attractive of
system (2) namely the population densities for the system willapproach to a positive equilibrium when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H9)
Remark 4 It should not be difficult to see that the methodand skills of constructing a suitable Lyapunov function in thepaper are very different with those of [29] and the method ofconstructing Lyapunov function in [29] cannot be used inthis manuscript
4 Periodic Solution
Assuming that coefficients of system (2) are positive con-tinuous and ω minus periodic functions then system (2) ischanged to the ω minus periodic system In this section we shallobtain conditions for the existence uniqueness and stabilityof a positive periodic for system (2) by using the fixed-pointtheory and some new analysis method For convenience wegive firstly the following lemma
Lemma 6 (see [34]) Let S sub Rn be convex and compact Ifmapping T S⟶ S is continuous then there exists a fixedpoint ie there exists xlowast isin S such that T(xlowast) xlowast
Next we state and prove our main result with respect tothe periodic solution for system (2)
Theorem 3 Assume that system (2) is a ω-periodic systemand satisfies conditions (H1) minus (H9) then system (2) has apositive unique ω-periodic solution which is globally as-ymptotically stable
Proof According to the existence and uniqueness theorem ofsolutions of functional differential equations [35ndash38] we candefine a Poincare mapping T R7
+⟶ R7+ as follows
T X0( 1113857 X tω X0( 1113857 (77)
where X(tω X0) (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)) be a positive solution of system (2) with initialconditions (7) And define
S x1 x2 x3 x4 u1 u2 u3( 1113857 isin R7+
mi lexi leMi i 1 2 3 4
nj le uj leNj j 1 2 3
111386811138681113868111386811138681113868111386811138681113868
⎧⎨
⎩
⎫⎬
⎭
(78)
en it is obvious that S sub R7+ is a convex and compact set
By eorem 1 and the continuity of solution of system (2)with respect to initial conditions (7) the mappingT S⟶ S is continuous Furthermore it is not difficult toshow that system (2) has a positive unique ω minus periodicsolution which is globally asymptotic stability by usingLemma 6 and eorem 2
Remark 5 From the result of eorem 3 the feedbackcontrol items and delays have influence on the periodic ofω minus periodic system (2) at is the population densities forthe periodic system will tend to a positive ω minus periodicequilibrium when system (2) satisfies ω minus periodic initialconditions (7) and assumptions (H1) minus (H9)
Journal of Mathematics 13
5 Numerical Simulation
In this section we give some numerical simulations to illustratethe feasibility of our main results In order to facilitate theverification of eorem 3 where the system is a periodicsystem we select the periodic function as the coefficient ofsystem (2) and consider the following multidelay periodicpredator-prey model with feedback control and prey diffusion
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)minus
(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
minus (0015 + 0005 sin πt)u1(t)1113859
+(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t) (25 + 05 sin πt) minus (225 + 025 cos πt)x21113858 1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)[minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857
+(05 + 01 sin πt)u2(t)1113859
_x4(t) x4(t)[minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857
+(045 + 005 sin πt)u3(t)1113859
_u1(t) (15 + 05 cos πt) minus (16 + 04 sin πt)u1(t)
+(015 + 005 sin πt)x1(t)
_u2(t) (2 + 05 cos πt) minus (105 + 005 sin πt)u2(t)
minus (15 + 05 sin πt)x3(t)
_u3(t) (355 + 005 cos πt) minus (345 + 045 sin πt)u3(t)
minus (225 + 025 sin πt)x4(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(79)
where time delay τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 1 t isin [minus 004 0]
x2(0) 1
x3(t) sin t + 1 t isin [minus 001 0]
x4(t) sin t + 1 t isin [minus 003 0]
ui(0) 1 (i 1 2 3)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(80)
From the conditions of eorem 3 we select somespecific parameter values shown in models (79) and (80)according to the calculation Of course the choiceof parameters in the model is not unique It is not difficultto verify that system (79) satisfies the conditions of eorems1ndash3 It holds from eorems 1 and 2 that system (79) ispermanent and globally attractive By means of eorem 3system (79) has a positive unique periodic solution which isglobally asymptotic stability By using the software packageMATLAB 71 we can solve the numerical solutions of systems(79) and (80) as shown in Figures 1ndash3 Figure 1 shows that thepermanence of system (79) with initial conditions (80) andtime delay τ1 001 τ2 002 τ3 003 and τ4 004 Itis not difficult to see from Figure 2 that system (79) isglobally attractive Figure 3 shows the dynamic behavior ofsystem (79)
In general ecosystems represented by deterministicLotkandashVolterra models are not suitable for describing thereal behavior of population dynamics e feedbackcontrol variable we described above is strictly related tothe environmental noise effect It is well known that theenvironmental noise is a very important factor in mod-eling natural phenomena in ecological systems At pres-ent it is impossible to model population dynamicswithout considering the interaction between the ecolog-ical system and environmental noise always present innature In fact the environmental noise acts construc-tively producing counterintuitive effects and interestingnoise-induced phenomena such as stochastic resonancenoise-enhanced stability and resonant activation (cf[39ndash43]) In addition the study of nonlinear dynamicalsystems with external noise has found some counterin-tuitive phenomena that play a constructive role in noiseand are highly fundamental and practical interests inmany scientific fields (cf [44ndash47]) e presence of noisesources can alter the stability of the ecosystem (cf[48ndash51]) In addition this noise in general breaks thesymmetry of the ecosystem see for example [52] andmoreover it gives rise to extinction phenomena becausethe multiplicative noise has the effect of an absorbingbarrier see for example [53]
As a response to this we consider the following cor-responding stochastic predator-prey model with the mul-tiplicative noise sources
14 Journal of Mathematics
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)
minus(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
+Dξ1(t)1113859 +(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t)[(25 + 05 sin πt)
minus (225 + 025 cos πt)x2(t)1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)1113890 minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857+Dξ2(t)1113891
_x4(t) x4(t)1113890 minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857+Dξ3(t)1113891
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(81)
where ξi(t) are δ-correlated Gaussian white noise sourceswith zero mean that is langδi(t)rang 0 andlangδi(t)δi(tprime)rang Diδ(t minus tprime)δij with Di the noise intensities(here we choose all equal noise intensities that is Di D)and time delays τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 05 t isin [minus 004 0]
x2(0) 05
x3(t) sin t + 05 t isin [minus 001 0]
x4(t) sin t + 05 t isin [minus 003 0]
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(82)
x1(t)x2(t)
x3(t)x4(t)
04
05
06
07
08
09
1
11
12
13
5 10 15 20 25 30 35 40 45 500t
(a)
u1(t)u2(t)u3(t)
07
08
09
1
11
12
13
14
15
16
5 10 15 20 25 30 35 40 45 500t
(b)
Figure 1 e numerical solution of system (79) with initial condition (60) (80)
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
16
2 4 6 8 10 12 14 16 18 200t
Figure 2 Numerical solution of system (79) with different initialconditions
Journal of Mathematics 15
0
02
04
06
08
1
12
14
16x 3
(t)
02 04 06 08 1 12 14 160x2(t)
(a)
1
15
2
25
x 2(t)
05 1 15 2 250x1(t)
(b)
02
04
06
08
1
12
14
16
18
2
22
x 3(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(c)
0
02
04
06
08
1
12
14
16
x 4(t)
04 06 08 1 12 14 160 02x2(t)
(d)
02
04
06
08
1
12
14
16
18
2
x 4(t)
04 06 08 1 12 14 16 18 202x3(t)
(e)
02
04
06
08
1
12
14
16
18
2
22
x 4(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(f )
Figure 3 Continued
16 Journal of Mathematics
005
115
2
005
115
2
x2(t)x3 (t)
0
05
1
15
2
x 4(t)
(g)
051
152
25
115
225
x1(t)x2 (t)
0
05
1
15
2
25
x 3(t)
(h)
051
152
25
115
2250
05
1
15
2
25
x 4(t)
x1(t)x2 (t)
(i)
x1(t)x3 (t)
051
152
005
115
20
05
1
15
2
x 4(t)
(j)
Figure 3 Dynamic behavior of system (79)
D = 0005
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(a)
D = 001
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(b)
Figure 4 Continued
Journal of Mathematics 17
D = 002
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(c)
x1(t)x2(t)
x3(t)x4(t)
D = 004
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(d)
Figure 4 e numerical solutions of systems (81) and (82) with very low noise intensities
D = 01
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(a)
D = 02
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(b)
Figure 5 Continued
18 Journal of Mathematics
D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

D+V7(t)le sgn u3(t) minus v3(t)( 1113857 minus f3(t) u3(t)(1113858
minus v3(t)1113857 minus q3(t) x4(t) minus y4(t)( 11138571113859
le minus fl3(t) u3(t) minus v3(t)
11138681113868111386811138681113868111386811138681113868
+ qm3 (t) x4(t) minus y4(t)
11138681113868111386811138681113868111386811138681113868
(69)
Finally we define a Lyapunov function as follows
V(t) 11139447
i1Vi(t) (70)
From (51) (58) (65) and (67)ndash(69) we can get that forall tgeT + τ
D+V(t)le minus 1113944
4
i1Ai xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 minus 1113944
3
j1Bj uj(t) minus vj(t)
11138681113868111386811138681113868
11138681113868111386811138681113868
(71)
In view of conditions (H9) of eorem 2 there exists aconstant αgt 0 and Tlowast gtT + τ such that for all tgeTlowast it holdsthat
Ai ge αgt 0
Bj ge αgt 0
i 1 2 3 4 j 1 2 3
(72)
Integrating fromTlowast to t on both sides of (71) and by (72)we have
V(t) + α1113946t
Tlowast1113944
4
i1xi(s) minus yi(s)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(s) minus vj(s)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠ds
leV Tlowast
( 1113857lt +infin
(73)
erefore V(t) is bounded on [Tlowast+infin) and we have
1113946infin
Tlowast1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113960 1113961 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113876 1113877⎛⎝ ⎞⎠dsleV(T)
αlt +infin
(74)
By (74) we also have
1113944
4
i1xi(t) minus yi(t)
111386811138681113868111386811138681113868111386811138681113872 1113873 + 1113944
3
j1uj(t) minus vj(t)
11138681113868111386811138681113868
111386811138681113868111386811138681113874 1113875 isin L1(T+infin)
(75)
Applying eorem 1 we can obtain that |xi(t) minus yi(t)||uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 and their derivativesremain bounded on [Tlowast+infin) and |xi(t) minus yi(t)| and|uj(t) minus vj(t)| i 1 2 3 4 j 1 2 3 are uniformly con-tinuous on [Tlowast+infin) By Lemma 5 we can conclude that
limt⟶+infin
xi(t) minus yi(t)1113868111386811138681113868
1113868111386811138681113868 0 i 1 2 3 4
limt⟶+infin
uj(t) minus vj(t)11138681113868111386811138681113868
11138681113868111386811138681113868 0 j 1 2 3(76)
is completes the proof and the solution of system (2)is globally attractive
Remark 3 From the result ofeorem 2 the feedback controlitems and delays have influence on the globally attractive of
system (2) namely the population densities for the system willapproach to a positive equilibrium when system (2) satisfiesinitial conditions (7) and assumptions (H1) minus (H9)
Remark 4 It should not be difficult to see that the methodand skills of constructing a suitable Lyapunov function in thepaper are very different with those of [29] and the method ofconstructing Lyapunov function in [29] cannot be used inthis manuscript
4 Periodic Solution
Assuming that coefficients of system (2) are positive con-tinuous and ω minus periodic functions then system (2) ischanged to the ω minus periodic system In this section we shallobtain conditions for the existence uniqueness and stabilityof a positive periodic for system (2) by using the fixed-pointtheory and some new analysis method For convenience wegive firstly the following lemma
Lemma 6 (see [34]) Let S sub Rn be convex and compact Ifmapping T S⟶ S is continuous then there exists a fixedpoint ie there exists xlowast isin S such that T(xlowast) xlowast
Next we state and prove our main result with respect tothe periodic solution for system (2)
Theorem 3 Assume that system (2) is a ω-periodic systemand satisfies conditions (H1) minus (H9) then system (2) has apositive unique ω-periodic solution which is globally as-ymptotically stable
Proof According to the existence and uniqueness theorem ofsolutions of functional differential equations [35ndash38] we candefine a Poincare mapping T R7
+⟶ R7+ as follows
T X0( 1113857 X tω X0( 1113857 (77)
where X(tω X0) (x1(t) x2(t) x3(t) x4(t) u1(t) u2(t) u3(t)) be a positive solution of system (2) with initialconditions (7) And define
S x1 x2 x3 x4 u1 u2 u3( 1113857 isin R7+
mi lexi leMi i 1 2 3 4
nj le uj leNj j 1 2 3
111386811138681113868111386811138681113868111386811138681113868
⎧⎨
⎩
⎫⎬
⎭
(78)
en it is obvious that S sub R7+ is a convex and compact set
By eorem 1 and the continuity of solution of system (2)with respect to initial conditions (7) the mappingT S⟶ S is continuous Furthermore it is not difficult toshow that system (2) has a positive unique ω minus periodicsolution which is globally asymptotic stability by usingLemma 6 and eorem 2
Remark 5 From the result of eorem 3 the feedbackcontrol items and delays have influence on the periodic ofω minus periodic system (2) at is the population densities forthe periodic system will tend to a positive ω minus periodicequilibrium when system (2) satisfies ω minus periodic initialconditions (7) and assumptions (H1) minus (H9)
Journal of Mathematics 13
5 Numerical Simulation
In this section we give some numerical simulations to illustratethe feasibility of our main results In order to facilitate theverification of eorem 3 where the system is a periodicsystem we select the periodic function as the coefficient ofsystem (2) and consider the following multidelay periodicpredator-prey model with feedback control and prey diffusion
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)minus
(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
minus (0015 + 0005 sin πt)u1(t)1113859
+(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t) (25 + 05 sin πt) minus (225 + 025 cos πt)x21113858 1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)[minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857
+(05 + 01 sin πt)u2(t)1113859
_x4(t) x4(t)[minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857
+(045 + 005 sin πt)u3(t)1113859
_u1(t) (15 + 05 cos πt) minus (16 + 04 sin πt)u1(t)
+(015 + 005 sin πt)x1(t)
_u2(t) (2 + 05 cos πt) minus (105 + 005 sin πt)u2(t)
minus (15 + 05 sin πt)x3(t)
_u3(t) (355 + 005 cos πt) minus (345 + 045 sin πt)u3(t)
minus (225 + 025 sin πt)x4(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(79)
where time delay τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 1 t isin [minus 004 0]
x2(0) 1
x3(t) sin t + 1 t isin [minus 001 0]
x4(t) sin t + 1 t isin [minus 003 0]
ui(0) 1 (i 1 2 3)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(80)
From the conditions of eorem 3 we select somespecific parameter values shown in models (79) and (80)according to the calculation Of course the choiceof parameters in the model is not unique It is not difficultto verify that system (79) satisfies the conditions of eorems1ndash3 It holds from eorems 1 and 2 that system (79) ispermanent and globally attractive By means of eorem 3system (79) has a positive unique periodic solution which isglobally asymptotic stability By using the software packageMATLAB 71 we can solve the numerical solutions of systems(79) and (80) as shown in Figures 1ndash3 Figure 1 shows that thepermanence of system (79) with initial conditions (80) andtime delay τ1 001 τ2 002 τ3 003 and τ4 004 Itis not difficult to see from Figure 2 that system (79) isglobally attractive Figure 3 shows the dynamic behavior ofsystem (79)
In general ecosystems represented by deterministicLotkandashVolterra models are not suitable for describing thereal behavior of population dynamics e feedbackcontrol variable we described above is strictly related tothe environmental noise effect It is well known that theenvironmental noise is a very important factor in mod-eling natural phenomena in ecological systems At pres-ent it is impossible to model population dynamicswithout considering the interaction between the ecolog-ical system and environmental noise always present innature In fact the environmental noise acts construc-tively producing counterintuitive effects and interestingnoise-induced phenomena such as stochastic resonancenoise-enhanced stability and resonant activation (cf[39ndash43]) In addition the study of nonlinear dynamicalsystems with external noise has found some counterin-tuitive phenomena that play a constructive role in noiseand are highly fundamental and practical interests inmany scientific fields (cf [44ndash47]) e presence of noisesources can alter the stability of the ecosystem (cf[48ndash51]) In addition this noise in general breaks thesymmetry of the ecosystem see for example [52] andmoreover it gives rise to extinction phenomena becausethe multiplicative noise has the effect of an absorbingbarrier see for example [53]
As a response to this we consider the following cor-responding stochastic predator-prey model with the mul-tiplicative noise sources
14 Journal of Mathematics
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)
minus(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
+Dξ1(t)1113859 +(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t)[(25 + 05 sin πt)
minus (225 + 025 cos πt)x2(t)1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)1113890 minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857+Dξ2(t)1113891
_x4(t) x4(t)1113890 minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857+Dξ3(t)1113891
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(81)
where ξi(t) are δ-correlated Gaussian white noise sourceswith zero mean that is langδi(t)rang 0 andlangδi(t)δi(tprime)rang Diδ(t minus tprime)δij with Di the noise intensities(here we choose all equal noise intensities that is Di D)and time delays τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 05 t isin [minus 004 0]
x2(0) 05
x3(t) sin t + 05 t isin [minus 001 0]
x4(t) sin t + 05 t isin [minus 003 0]
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(82)
x1(t)x2(t)
x3(t)x4(t)
04
05
06
07
08
09
1
11
12
13
5 10 15 20 25 30 35 40 45 500t
(a)
u1(t)u2(t)u3(t)
07
08
09
1
11
12
13
14
15
16
5 10 15 20 25 30 35 40 45 500t
(b)
Figure 1 e numerical solution of system (79) with initial condition (60) (80)
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
16
2 4 6 8 10 12 14 16 18 200t
Figure 2 Numerical solution of system (79) with different initialconditions
Journal of Mathematics 15
0
02
04
06
08
1
12
14
16x 3
(t)
02 04 06 08 1 12 14 160x2(t)
(a)
1
15
2
25
x 2(t)
05 1 15 2 250x1(t)
(b)
02
04
06
08
1
12
14
16
18
2
22
x 3(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(c)
0
02
04
06
08
1
12
14
16
x 4(t)
04 06 08 1 12 14 160 02x2(t)
(d)
02
04
06
08
1
12
14
16
18
2
x 4(t)
04 06 08 1 12 14 16 18 202x3(t)
(e)
02
04
06
08
1
12
14
16
18
2
22
x 4(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(f )
Figure 3 Continued
16 Journal of Mathematics
005
115
2
005
115
2
x2(t)x3 (t)
0
05
1
15
2
x 4(t)
(g)
051
152
25
115
225
x1(t)x2 (t)
0
05
1
15
2
25
x 3(t)
(h)
051
152
25
115
2250
05
1
15
2
25
x 4(t)
x1(t)x2 (t)
(i)
x1(t)x3 (t)
051
152
005
115
20
05
1
15
2
x 4(t)
(j)
Figure 3 Dynamic behavior of system (79)
D = 0005
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(a)
D = 001
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(b)
Figure 4 Continued
Journal of Mathematics 17
D = 002
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(c)
x1(t)x2(t)
x3(t)x4(t)
D = 004
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(d)
Figure 4 e numerical solutions of systems (81) and (82) with very low noise intensities
D = 01
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(a)
D = 02
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(b)
Figure 5 Continued
18 Journal of Mathematics
D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

5 Numerical Simulation
In this section we give some numerical simulations to illustratethe feasibility of our main results In order to facilitate theverification of eorem 3 where the system is a periodicsystem we select the periodic function as the coefficient ofsystem (2) and consider the following multidelay periodicpredator-prey model with feedback control and prey diffusion
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)minus
(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
minus (0015 + 0005 sin πt)u1(t)1113859
+(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t) (25 + 05 sin πt) minus (225 + 025 cos πt)x21113858 1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)[minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857
+(05 + 01 sin πt)u2(t)1113859
_x4(t) x4(t)[minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857
+(045 + 005 sin πt)u3(t)1113859
_u1(t) (15 + 05 cos πt) minus (16 + 04 sin πt)u1(t)
+(015 + 005 sin πt)x1(t)
_u2(t) (2 + 05 cos πt) minus (105 + 005 sin πt)u2(t)
minus (15 + 05 sin πt)x3(t)
_u3(t) (355 + 005 cos πt) minus (345 + 045 sin πt)u3(t)
minus (225 + 025 sin πt)x4(t)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(79)
where time delay τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 1 t isin [minus 004 0]
x2(0) 1
x3(t) sin t + 1 t isin [minus 001 0]
x4(t) sin t + 1 t isin [minus 003 0]
ui(0) 1 (i 1 2 3)
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(80)
From the conditions of eorem 3 we select somespecific parameter values shown in models (79) and (80)according to the calculation Of course the choiceof parameters in the model is not unique It is not difficultto verify that system (79) satisfies the conditions of eorems1ndash3 It holds from eorems 1 and 2 that system (79) ispermanent and globally attractive By means of eorem 3system (79) has a positive unique periodic solution which isglobally asymptotic stability By using the software packageMATLAB 71 we can solve the numerical solutions of systems(79) and (80) as shown in Figures 1ndash3 Figure 1 shows that thepermanence of system (79) with initial conditions (80) andtime delay τ1 001 τ2 002 τ3 003 and τ4 004 Itis not difficult to see from Figure 2 that system (79) isglobally attractive Figure 3 shows the dynamic behavior ofsystem (79)
In general ecosystems represented by deterministicLotkandashVolterra models are not suitable for describing thereal behavior of population dynamics e feedbackcontrol variable we described above is strictly related tothe environmental noise effect It is well known that theenvironmental noise is a very important factor in mod-eling natural phenomena in ecological systems At pres-ent it is impossible to model population dynamicswithout considering the interaction between the ecolog-ical system and environmental noise always present innature In fact the environmental noise acts construc-tively producing counterintuitive effects and interestingnoise-induced phenomena such as stochastic resonancenoise-enhanced stability and resonant activation (cf[39ndash43]) In addition the study of nonlinear dynamicalsystems with external noise has found some counterin-tuitive phenomena that play a constructive role in noiseand are highly fundamental and practical interests inmany scientific fields (cf [44ndash47]) e presence of noisesources can alter the stability of the ecosystem (cf[48ndash51]) In addition this noise in general breaks thesymmetry of the ecosystem see for example [52] andmoreover it gives rise to extinction phenomena becausethe multiplicative noise has the effect of an absorbingbarrier see for example [53]
As a response to this we consider the following cor-responding stochastic predator-prey model with the mul-tiplicative noise sources
14 Journal of Mathematics
_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)
minus(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
+Dξ1(t)1113859 +(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t)[(25 + 05 sin πt)
minus (225 + 025 cos πt)x2(t)1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)1113890 minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857+Dξ2(t)1113891
_x4(t) x4(t)1113890 minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857+Dξ3(t)1113891
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(81)
where ξi(t) are δ-correlated Gaussian white noise sourceswith zero mean that is langδi(t)rang 0 andlangδi(t)δi(tprime)rang Diδ(t minus tprime)δij with Di the noise intensities(here we choose all equal noise intensities that is Di D)and time delays τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 05 t isin [minus 004 0]
x2(0) 05
x3(t) sin t + 05 t isin [minus 001 0]
x4(t) sin t + 05 t isin [minus 003 0]
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(82)
x1(t)x2(t)
x3(t)x4(t)
04
05
06
07
08
09
1
11
12
13
5 10 15 20 25 30 35 40 45 500t
(a)
u1(t)u2(t)u3(t)
07
08
09
1
11
12
13
14
15
16
5 10 15 20 25 30 35 40 45 500t
(b)
Figure 1 e numerical solution of system (79) with initial condition (60) (80)
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
16
2 4 6 8 10 12 14 16 18 200t
Figure 2 Numerical solution of system (79) with different initialconditions
Journal of Mathematics 15
0
02
04
06
08
1
12
14
16x 3
(t)
02 04 06 08 1 12 14 160x2(t)
(a)
1
15
2
25
x 2(t)
05 1 15 2 250x1(t)
(b)
02
04
06
08
1
12
14
16
18
2
22
x 3(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(c)
0
02
04
06
08
1
12
14
16
x 4(t)
04 06 08 1 12 14 160 02x2(t)
(d)
02
04
06
08
1
12
14
16
18
2
x 4(t)
04 06 08 1 12 14 16 18 202x3(t)
(e)
02
04
06
08
1
12
14
16
18
2
22
x 4(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(f )
Figure 3 Continued
16 Journal of Mathematics
005
115
2
005
115
2
x2(t)x3 (t)
0
05
1
15
2
x 4(t)
(g)
051
152
25
115
225
x1(t)x2 (t)
0
05
1
15
2
25
x 3(t)
(h)
051
152
25
115
2250
05
1
15
2
25
x 4(t)
x1(t)x2 (t)
(i)
x1(t)x3 (t)
051
152
005
115
20
05
1
15
2
x 4(t)
(j)
Figure 3 Dynamic behavior of system (79)
D = 0005
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(a)
D = 001
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(b)
Figure 4 Continued
Journal of Mathematics 17
D = 002
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(c)
x1(t)x2(t)
x3(t)x4(t)
D = 004
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(d)
Figure 4 e numerical solutions of systems (81) and (82) with very low noise intensities
D = 01
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(a)
D = 02
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(b)
Figure 5 Continued
18 Journal of Mathematics
D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

_x1(t) x1(t) (5 + cos πt) minus (625 + 125 sin πt)x1(t)1113858
minus(075 + 025 sin πt)x3(t)
(18 + 02 sin πt) + x1(t)
minus(1 + 05 sin πt)x4(t)
(15 + 05 sin πt) + x1(t)
+Dξ1(t)1113859 +(0002 + 0001 sin πt) x2(t) minus x1(t)( 1113857
_x2(t) x2(t)[(25 + 05 sin πt)
minus (225 + 025 cos πt)x2(t)1113859
+(00015 + 00005 sin πt) x1(t) minus x2(t)( 1113857
_x3(t) x3(t)1113890 minus (015 + 001 cos πt)
minus (55 + 05 sin πt)x3 t minus τ1( 1113857
+(55 + 05 sin πt)x1 t minus τ2( 1113857
(18 + 02 sin πt) + x1 t minus τ2( 1113857+Dξ2(t)1113891
_x4(t) x4(t)1113890 minus (0025 + 0005 cos πt)
minus (725 + 005 sin πt)x4 t minus τ3( 1113857
+(75 + 05 sin πt)x1 t minus τ4( 1113857
(15 + 05 sin πt) + x1 t minus τ4( 1113857+Dξ3(t)1113891
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(81)
where ξi(t) are δ-correlated Gaussian white noise sourceswith zero mean that is langδi(t)rang 0 andlangδi(t)δi(tprime)rang Diδ(t minus tprime)δij with Di the noise intensities(here we choose all equal noise intensities that is Di D)and time delays τ1 001 τ2 002 τ3 003 andτ4 004 and the initial conditions are as follows
x1(t) sin t + 05 t isin [minus 004 0]
x2(0) 05
x3(t) sin t + 05 t isin [minus 001 0]
x4(t) sin t + 05 t isin [minus 003 0]
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
(82)
x1(t)x2(t)
x3(t)x4(t)
04
05
06
07
08
09
1
11
12
13
5 10 15 20 25 30 35 40 45 500t
(a)
u1(t)u2(t)u3(t)
07
08
09
1
11
12
13
14
15
16
5 10 15 20 25 30 35 40 45 500t
(b)
Figure 1 e numerical solution of system (79) with initial condition (60) (80)
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
16
2 4 6 8 10 12 14 16 18 200t
Figure 2 Numerical solution of system (79) with different initialconditions
Journal of Mathematics 15
0
02
04
06
08
1
12
14
16x 3
(t)
02 04 06 08 1 12 14 160x2(t)
(a)
1
15
2
25
x 2(t)
05 1 15 2 250x1(t)
(b)
02
04
06
08
1
12
14
16
18
2
22
x 3(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(c)
0
02
04
06
08
1
12
14
16
x 4(t)
04 06 08 1 12 14 160 02x2(t)
(d)
02
04
06
08
1
12
14
16
18
2
x 4(t)
04 06 08 1 12 14 16 18 202x3(t)
(e)
02
04
06
08
1
12
14
16
18
2
22
x 4(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(f )
Figure 3 Continued
16 Journal of Mathematics
005
115
2
005
115
2
x2(t)x3 (t)
0
05
1
15
2
x 4(t)
(g)
051
152
25
115
225
x1(t)x2 (t)
0
05
1
15
2
25
x 3(t)
(h)
051
152
25
115
2250
05
1
15
2
25
x 4(t)
x1(t)x2 (t)
(i)
x1(t)x3 (t)
051
152
005
115
20
05
1
15
2
x 4(t)
(j)
Figure 3 Dynamic behavior of system (79)
D = 0005
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(a)
D = 001
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(b)
Figure 4 Continued
Journal of Mathematics 17
D = 002
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(c)
x1(t)x2(t)
x3(t)x4(t)
D = 004
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(d)
Figure 4 e numerical solutions of systems (81) and (82) with very low noise intensities
D = 01
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(a)
D = 02
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(b)
Figure 5 Continued
18 Journal of Mathematics
D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

0
02
04
06
08
1
12
14
16x 3
(t)
02 04 06 08 1 12 14 160x2(t)
(a)
1
15
2
25
x 2(t)
05 1 15 2 250x1(t)
(b)
02
04
06
08
1
12
14
16
18
2
22
x 3(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(c)
0
02
04
06
08
1
12
14
16
x 4(t)
04 06 08 1 12 14 160 02x2(t)
(d)
02
04
06
08
1
12
14
16
18
2
x 4(t)
04 06 08 1 12 14 16 18 202x3(t)
(e)
02
04
06
08
1
12
14
16
18
2
22
x 4(t)
06 08 1 12 14 16 18 2 22 2404x1(t)
(f )
Figure 3 Continued
16 Journal of Mathematics
005
115
2
005
115
2
x2(t)x3 (t)
0
05
1
15
2
x 4(t)
(g)
051
152
25
115
225
x1(t)x2 (t)
0
05
1
15
2
25
x 3(t)
(h)
051
152
25
115
2250
05
1
15
2
25
x 4(t)
x1(t)x2 (t)
(i)
x1(t)x3 (t)
051
152
005
115
20
05
1
15
2
x 4(t)
(j)
Figure 3 Dynamic behavior of system (79)
D = 0005
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(a)
D = 001
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(b)
Figure 4 Continued
Journal of Mathematics 17
D = 002
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(c)
x1(t)x2(t)
x3(t)x4(t)
D = 004
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(d)
Figure 4 e numerical solutions of systems (81) and (82) with very low noise intensities
D = 01
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(a)
D = 02
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(b)
Figure 5 Continued
18 Journal of Mathematics
D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

005
115
2
005
115
2
x2(t)x3 (t)
0
05
1
15
2
x 4(t)
(g)
051
152
25
115
225
x1(t)x2 (t)
0
05
1
15
2
25
x 3(t)
(h)
051
152
25
115
2250
05
1
15
2
25
x 4(t)
x1(t)x2 (t)
(i)
x1(t)x3 (t)
051
152
005
115
20
05
1
15
2
x 4(t)
(j)
Figure 3 Dynamic behavior of system (79)
D = 0005
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(a)
D = 001
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(b)
Figure 4 Continued
Journal of Mathematics 17
D = 002
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(c)
x1(t)x2(t)
x3(t)x4(t)
D = 004
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(d)
Figure 4 e numerical solutions of systems (81) and (82) with very low noise intensities
D = 01
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(a)
D = 02
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(b)
Figure 5 Continued
18 Journal of Mathematics
D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

D = 002
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
5 10 15 20 25 300t
(c)
x1(t)x2(t)
x3(t)x4(t)
D = 004
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(d)
Figure 4 e numerical solutions of systems (81) and (82) with very low noise intensities
D = 01
x1(t)x2(t)
x3(t)x4(t)
02
03
04
05
06
07
08
09
1
11
12
5 10 15 20 25 300t
(a)
D = 02
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(b)
Figure 5 Continued
18 Journal of Mathematics
D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

D = 04
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(c)
D = 08
x1(t)x2(t)
x3(t)x4(t)
0
02
04
06
08
1
12
14
5 10 15 20 25 300t
(d)
Figure 5 e numerical solutions of systems (81) and (82) with low noise intensities
D = 25
0
05
1
15
2
25
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(a)
D = 26
0
1
2
3
4
5
6
5 10 15 20 25 300t
x1(t)x2(t)
x3(t)x4(t)
(b)
Figure 6 Continued
Journal of Mathematics 19
D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

D = 27
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(c)
D = 28
5 10 15 20 25 300t
0
05
1
15
2
25
3
35
x1(t)x2(t)
x3(t)x4(t)
(d)
Figure 6 e numerical solutions of systems (81) and (82) with high noise intensities
x 1(t)
D = 0005
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 0005
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 0005
0
01
02
03
04
05
06
07
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 7 e numerical solutions of systems (81) and (82) with very low noise intensities and different initial values
20 Journal of Mathematics
x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

x 1(t)
D = 08
0
02
04
06
08
1
12
14
16
18
2
2 4 6 8 10 12 14 16 18 200t
(a)
x 2(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(b)
x 3(t)
D = 08
0
01
02
03
04
05
06
07
08
2 4 6 8 10 12 14 16 18 200t
(c)
x 4(t)
D = 08
0
01
02
03
04
05
06
07
08
09
1
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 8 e numerical solutions of systems (81) and (82) with low noise intensities and different initial values
D = 25
x 1(t)
0
05
1
15
2
25
3
35
4
45
2 4 6 8 10 12 14 16 18 200t
(a)
D = 25
x 2(t)
0010203040506070809
1
2 4 6 8 10 12 14 16 18 200t
(b)
Figure 9 Continued
Journal of Mathematics 21
D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

D = 25x 4(t)
005
115
225
335
4
545
2 4 6 8 10 12 14 16 18 200t
(c)
D = 25
x 3(t)
0
02
04
06
08
1
12
14
16
18
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 9 e numerical solutions of systems (81) and (82) with high noise intensities and different initial values
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
05
1
15
2
25
x 1(t)
2 4 6 8 10 12 14 16 18 200t
(a)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
t
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200
(b)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
02
04
06
08
1
12
14
x 4(t)
2 4 6 8 10 12 14 16 18 200t
(c)
D = 0005D = 01D = 04D = 08
D = 10D = 11D = 13
0
01
02
03
04
05
06
07
08
09
1
x 3(t)
2 4 6 8 10 12 14 16 18 200t
(d)
Figure 10 e numerical solutions of systems (81) and (82) with different noise intensities
22 Journal of Mathematics
By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

By using MATLAB71 software we can obtain somenumerical solutions of systems (81) and (82) with differentnoise intensities as shown in Figures 4ndash6 From Figure 4 itis easy to find that the new stochastic equations (81) and (82)have an almost deterministic periodic solution when thenoise intensity is very low Figure 5 shows that the peri-odicity of the prey density in the 1-st patch x1(t) and thepredator densities xi(t) i 3 4 are destroyed when thenoise intensities increase to 01 and the smoothness of thesolution becomes worse as the noise density increasesMoreover as can be seen from Figure 6 when the noise
intensities increase to 25 all predator species tend to be-come extinct In order to further discover the influence ofnoise on the property of the solution of the system wecontinue to solve numerically equations (81) and (82) bychanging the parameters and initial conditions of the systemas shown in Figures 7ndash11 From Figures 7ndash9 it is easy to findthat the initial value has little effect on the properties of thesolution of equations (81) and (82) Figure 10 shows that thenoise intensity plays an important role in the periodicity andpersistence of the solution Moreover as can be seen fromFigure 11 time delays play an important role in the stability
D = 02
04
05
06
07
08
09
1
11
12
13
x 1(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(a)
D = 02
04
05
06
07
08
09
1
x 2(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(b)
D = 02
0
01
02
03
04
05
06
07
08
x 3(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(c)
D = 02
0
05
1
15
2
25
3
35
4
x 4(t)
2 4 6 8 10 12 14 16 18 200t
τ(5)
τ(6)
τ(7)
τ(1)
τ(2)
τ(3)
τ(4)
(d)
Figure 11 e numerical solutions of systems (81) and (82) with different time delays where τ(1) (001 002 003 004)τ(2) (03 003 04 005) τ(3) (06 004 07 006) τ(4) (08 005 09 007) τ(5) (1 006 11 007) τ(6) (11 008 12 008) andτ(7) (12 009 13 009)
Journal of Mathematics 23
and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

and periodicity of solutions By comparing the results shownin Figures 4ndash11 with those shown in Figures 1ndash3 it can beseen that stochastic environmental noise has obvious in-fluence on the persistence periodicity and stability of thepredator-prey system
6 Conclusion
In this paper we propose and investigate a class of 3-speciesmultidelay ratio-dependent predator-prey model withfeedback controls and prey diffusion By using the theory ofdelay differential inequalities and developing some newanalysis methods as well as constructing a suitable Lyapunovfunction some sufficient conditions are obtained to ensurethe permanence and global stability of the system Fur-thermore by defining a Poincare mapping and using theBrouwer fixed-point theorem some conditions for the ex-istence uniqueness and stability of positive periodic solu-tions for the corresponding periodic systems are obtained Inaddition some numerical solutions of the equations de-scribing the system are given to verify the obtained criteriaFinally the corresponding stochastic predator-prey modelwith multiplicative noise sources is solved numerically andsome interesting new dynamics are obtained
Time delay and diffusion are very common phenomenain the ecosystem but some scholars have not studied theseproblems deeply e time delay and diffusion terms addedin this paper are relatively simple and cannot reflect moregeneral ecosystems but they are the focus of our futureresearch including the extension of multiple time delays toinfinite time delays By analyzing the system after adding thefeedback control it can be found that the feedback controlitem has influence on the persistence and global stability ofthe original system erefore in some ecosystems somespecies can be controlled to maintain the balance andsustainable development of the ecosystem which is also thepractical significance of this project In addition by com-paring the numerical solutions of equations (79) and (80)with those of equations (81) and (82) it is found that thestochastic environmental noise will affect the persistenceperiodicity and stability of the periodic predator-preysystem
Remark 6 e main contribution and innovation of thispaper are as follows (1) we introduce the control variablesratio-dependent functions prey diffusion term and delaysto the known model and the new model can better describethe interactions among multispecies (2) To study the newmodel we obtain some new methods and skills such as thestructure of the Lyapunov function and the applications ofdelay differential inequalities which can also be used toresearch other related models (3) In this paper the researchcontents are more rich than the related references We studynot only the permanence and global attractivity for the newmodel but also study the periodic solution In addition thecorresponding stochastic predator-prey model with multi-plicative noise sources is solved numerically and someinteresting new dynamics are obtained (4) e sufficientconditions obtained herein are new general and easily
verifiable which provide flexibility for the application andanalysis of the 3-species multidelay LotkandashVolterra ratio-dependent predator-prey model
Data Availability
e data used to support the findings of this work are in-cluded within this article
Conflicts of Interest
e author declares that there are no conflicts of interest
Acknowledgments
is work was supported by the Scientific Research Fund ofthe Yunnan Provincial Education Department under grantnumber (Grant no 2018JS737) of China and the Program forInnovative Research Team (in Science and Technology) inUniversity of Yunnan Province
References
[1] Z Lu and W Wang ldquoPermanence and global attractivity forLotka-Volterra difference systemsrdquo Journal of MathematicalBiology vol 39 no 3 pp 269ndash282 1999
[2] Y-J Zhang and C-Y Wang ldquoStability analysis of n-specieslotka-volterra almost periodic competition models withgrazing rates and diffusionsrdquo International Journal of Bio-mathematics vol 7 no 2 Article ID 1450011 2014
[3] J Llibre and D Xiao ldquoGlobal dynamics of a lotka--volterramodel with two predators competing for one preyrdquo SiamJournal on Applied Mathematics vol 74 no 2 pp 434ndash4532014
[4] V Hadziabdic M Mehuljic and J Bektesevic ldquoLotka-volterramodel with two predators and their preyrdquo TEM Journalvol 6 no 1 pp 132ndash136 2017
[5] L Chen Z Lu and W Wang ldquoe effect of delays on thepermanence for lotka-volterra systemsrdquo Applied MathematicsLetters vol 8 no 4 pp 71ndash73 1995
[6] C Wang Q Yang Y Zhuo and R Li ldquoSynchronizationanalysis of a fractional-order non-autonomous neural net-work with time delayrdquo Physica A Statistical Mechanics and ItsApplications 2020 In press
[7] C-Y Wang S Wang F-P Yang and L-R Li ldquoGlobal as-ymptotic stability of positive equilibrium of three-specieslotka-volterra mutualism models with diffusion and delayeffectsrdquo Applied Mathematical Modelling vol 34 no 12pp 4278ndash4288 2010
[8] G Lu Z Lu and Y Enatsu ldquoPermanence for Lotka-Volterrasystems with multiple delaysrdquoNonlinear Analysis Real WorldApplications vol 12 no 5 pp 2552ndash2560 2011
[9] A Muhammadhaji Z Teng and M Rehim ldquoDynamicalbehavior for a class of delayed competitive-mutualism sys-temsrdquo Differential Equations and Dynamical Systems vol 23no 3 pp 281ndash301 2015
[10] X Song and L Chen ldquoPersistence and periodic orbits for two-species predator-prey system with diffusionrdquo Canadian Ap-plied Mathematics Quarterly vol 6 no 3 pp 233ndash244 1998
[11] X Song and L Chen ldquoPersistence and global stability fornonautonomous predator-prey system with diffusion andtime delayrdquo Computers amp Mathematics with Applicationsvol 35 no 6 pp 33ndash40 1998
24 Journal of Mathematics
[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

[12] J Cui ldquoe effect of dispersal on permanence in a predator-prey population growth modelrdquo Computers amp Mathematicswith Applications vol 44 no 8-9 pp 1085ndash1097 2002
[13] F Wei Y Lin L Que Y Chen Y Wu and Y Xue ldquoPeriodicsolution and global stability for a nonautonomous competi-tive lotka-volterra diffusion systemrdquo Applied Mathematicsand Computation vol 216 no 10 pp 3097ndash3104 2010
[14] J Wang and K Wang ldquoDynamics of a ratio-dependent onepredator-two competing prey modelrdquo Mathematica Appli-cata vol 17 no 2 pp 172ndash178 2004 in Chinese
[15] G Chen Z Teng and Z Hu ldquoAnalysis of stability for adiscrete ratio-dependent predator-prey systemrdquo IndianJournal of Pure and Applied Mathematics vol 42 no 1pp 1ndash26 2011
[16] Y Peng and H Ling ldquoPattern formation in a ratio-dependentpredator-prey model with cross-diffusionrdquo Applied Mathe-matics and Computation vol 331 pp 307ndash318 2018
[17] P Lundberg and J M Fryxell ldquoExpected population densityversus productivity in ratio-dependent and prey-dependentmodelsrdquo-eAmerican Naturalist vol 146 no 1 pp 153ndash1611995
[18] R Xu and M A J Chaplain ldquoPersistence and global stabilityin a delayed predator-prey systemwithmichaelis-menten typefunctional responserdquo Applied Mathematics and Computationvol 130 no 1 pp 441ndash455 2002
[19] R Xu M A J Chaplain and F A Davidson ldquoPeriodicsolution of a lotka-volterra predator-prey model with dis-persion and time delaysrdquo Applied Mathematics and Com-putation vol 148 no 2 pp 537ndash560 2004
[20] H-F Huo and W-T Li ldquoPeriodic solution of a delayedpredator-prey system with michaelis-menten type functionalresponserdquo Journal of Computational and Applied Mathe-matics vol 166 no 2 pp 453ndash463 2004
[21] S Sun and C Yuan ldquoAnalysis for three-species mixture modelwith diffusion and ratio-dependencerdquo Journal of SystemsScience and Mathematical Sciences vol 25 no 1 pp 87ndash952005
[22] X Zhou X Shi and X Song ldquoAnalysis of nonautonomouspredator-prey model with nonlinear diffusion and time de-layrdquo Applied Mathematics and Computation vol 196 no 1pp 129ndash136 2008
[23] R Xu and L Chen ldquoPersistence and global stability for athree-species ratio-dependent predator-prey system with timedelays in two-patch environmentsrdquo Acta Mathematica Sci-entia vol 22 no 4 pp 533ndash541 2002
[24] Z Du and Y Lv ldquoPermanence and almost periodic solution ofa Lotka-Volterra model with mutual interference and timedelaysrdquo Applied Mathematical Modelling vol 37 no 3pp 1054ndash1068 2013
[25] K Gopalsamy and P Weng ldquoGlobal attractivity in a com-petition system with feedback controlsrdquo Computers andMathematics with Applications vol 45 no 1 pp 665ndash6762003
[26] W Xie and P Weng ldquoExistence of periodic solution for apredator-prey model with patch-diffusion and feedbackcontrolrdquo Journal of South China Normal University (NaturalScience Edition) vol 44 no 1 pp 42ndash47 2012 in Chinese
[27] J Xu and F Chen ldquoPermanence of a lotka-volterra cooper-ative system with time delays and feedback controlsrdquo Com-munications in Mathematical Biology amp Neuroscience vol 18no 1 pp 1ndash12 2015
[28] J Liang ldquoe permanence and global stability of a two-speciescooperation system with time delays and feedback controlsrdquo
Journal of Ningxia University(Natural Science Edition)vol 37 no 2 pp 161ndash164 2016 in Chinese
[29] C Wang H Liu S Pan et al ldquoGlobally attractive of a ratio-dependent lotka-volterra predator-prey model with feedbackcontrolrdquo Advances in Bioscience and Bioengineering vol 4no 5 pp 59ndash66 2016
[30] F Chen ldquoe permanence and global attractivity of lotka-volterra competition system with feedback controlsrdquo Non-linear Analysis Real World Applications vol 7 no 1pp 133ndash143 2006
[31] F Chen ldquoOn a nonlinear nonautonomous predator-preymodel with diffusion and distributed delayrdquo Journal ofComputational and Applied Mathematics vol 180 no 1pp 33ndash49 2005
[32] Y Nakata and Y Muroya ldquoPermanence for nonautonomousLotka-Volterra cooperative systems with delaysrdquo NonlinearAnalysis Real World Applications vol 11 no 1 pp 528ndash5342010
[33] H K Khalil Nonlinear Systems Prentice-Hall EnglewoodCliffs NJ USA 3rd edition 2002
[34] W Basener Topology and Its Applications JohnWiley amp SonsHoboken NJ USA 2006
[35] Q Shi and S Wang ldquoNonrelativistic approximation in theenergy space for KGS systemrdquo Journal of MathematicalAnalysis and Applications vol 462 no 2 pp 1242ndash1253 2018
[36] Q Shi X B Zhang C Wang and S Wang ldquoFinite timeblowup for klein-gordon-schrodinger systemrdquo MathematicalMethods in the Applied Sciences vol 42 no 11 pp 3929ndash39412019
[37] C Wang N Li Y Zhou X Pu and R Li ldquoOn a multi-delayLotka-Volterra predator-prey model with feedback controlsand prey diffusionrdquo Acta Mathematica Scientia vol 39 no 2pp 429ndash448 2019
[38] C Wang L Li Q Zhang and R Li ldquoDynamical behaviour ofa Lotka-Volterra competitive-competitive-cooperative modelwith feedback controls and time delaysrdquo Journal of BiologicalDynamics vol 13 no 1 pp 43ndash68 2019
[39] B Spagnolo A Fiasconaro and D Valenti ldquoNoise inducedphenomena in Lotka-Volterra systemsrdquo Fluctuation andNoise Letters vol 3 no 2 pp L177ndashL185 2003
[40] B Spagnolo M Cirone A L Barbera and F de PasqualeldquoNoise-induced effects in population dynamicsrdquo Journal ofPhysics CondensedMatter vol 14 no 9 pp 2247ndash2255 2002
[41] A Spagnolo D Valenti and A Fiasconaro ldquoNoise in eco-systems a short reviewrdquo Mathematical Biosciences and En-gineering vol 1 no 1 pp 185ndash211 2004
[42] A Fiasconaro and B Spagnolo ldquoResonant activation inpiecewise linear asymmetric potentialsrdquo Physical Review Evol 83 no 4 Article ID 041122 2011
[43] N Pizzolato A Fiasconaro D Persano Adorno andB Spagnolo ldquoResonant activation in polymer translocationnew insights into the escape dynamics of molecules driven byan oscillating fieldrdquo Physical Biology vol 7 no 3 Article ID034001 2010
[44] A A Dubkou and B Spagnolo ldquoVerhulst model with Levywhite noise excitationrdquo -e European Physical Journal Bvol 65 no 3 pp 361ndash367 2008
[45] D Valenti L Tranchina M Brai et al ldquoEnvironmental metalpollution considered as noise effects on the spatial distri-bution of benthic foraminifera in two coastal marine areas ofSicily (Southern Italy)rdquo Ecological Modelling vol 213 no 3-4pp 449ndash462 2008
[46] A L Barbera and B Spagnolo ldquoSpatio-temporal patterns inpopulation dynamicsrdquo Physica A vol 314 pp 120ndash124 2002
Journal of Mathematics 25
[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics

[47] A Fiasconaro D Valenti and B Spagnolo ldquoNonmonotonicbehavior of spatiotemporal pattern formation in a noisylotkandashvolterra systemrdquo Acta Physica Polonica B vol 35 no 4pp 1491ndash1500 2004
[48] O A Chichigina A A Dubkov D Valenti et al ldquoStability ina system subject to noise with regulated periodicityrdquo PhysicalReview E vol 84 no 2 Article ID 021134 2011
[49] B Spagnolo C Guarcello L Magazzu A CarolloD P Adorno and D Valenti ldquoNonlinear relaxation phe-nomena in metastable condensed matter systemsrdquo Entropyvol 19 no 1 p 20 2017
[50] B Spagnolo D Valenti C Guarcello et al ldquoNoise-inducedeffects in nonlinear relaxation of condensed matter systemsrdquoChaos Solitons amp Fractals vol 81 pp 412ndash424 2015
[51] D Valenti L Magazzu P Caldara et al ldquoStabilization ofquantum metastable states by dissipationrdquo Physical Review Bvol 91 no 23 Article ID 235412 2015
[52] D Valenti A Fiasconaro and B Spagnolo ldquoStochastic res-onance and noise delayed extinction in a model of twocompeting speciesrdquo Physica A Statistical Mechanics and ItsApplications vol 331 no 3-4 pp 477ndash486 2004
[53] S Ciuchi F de Pasquale and B Spagnolo ldquoNonlinear re-laxation in the presence of an absorbing barrierrdquo PhysicalReview E vol 47 no 6 pp 3915ndash3926 1993
26 Journal of Mathematics