Embed Size (px)
Citation preview
Team: Brian Eccles, Brendan McLeod
Tim Murcko, TJ Watson, Mitch Wills
Advised By: Professors Taskin Padir, Sonia Chernova
& Kenneth Stafford
An Amphibious Search and Discovery Rover
Intel-Cornell Cup Final Presentation
Presentation Outline1. Project Introduction
• Project Motivation • Mission • The WALRUS Rover • Design Overview
2. Evaluation 3. Logistics
2

• Robots have been used in search and humanitarian missions since September 11th, 2001.
• Current robots are… • Limited by deep water. • Targeted solutions. • High cost. • Closed systems with narrow expandability.
3
Project Motivation
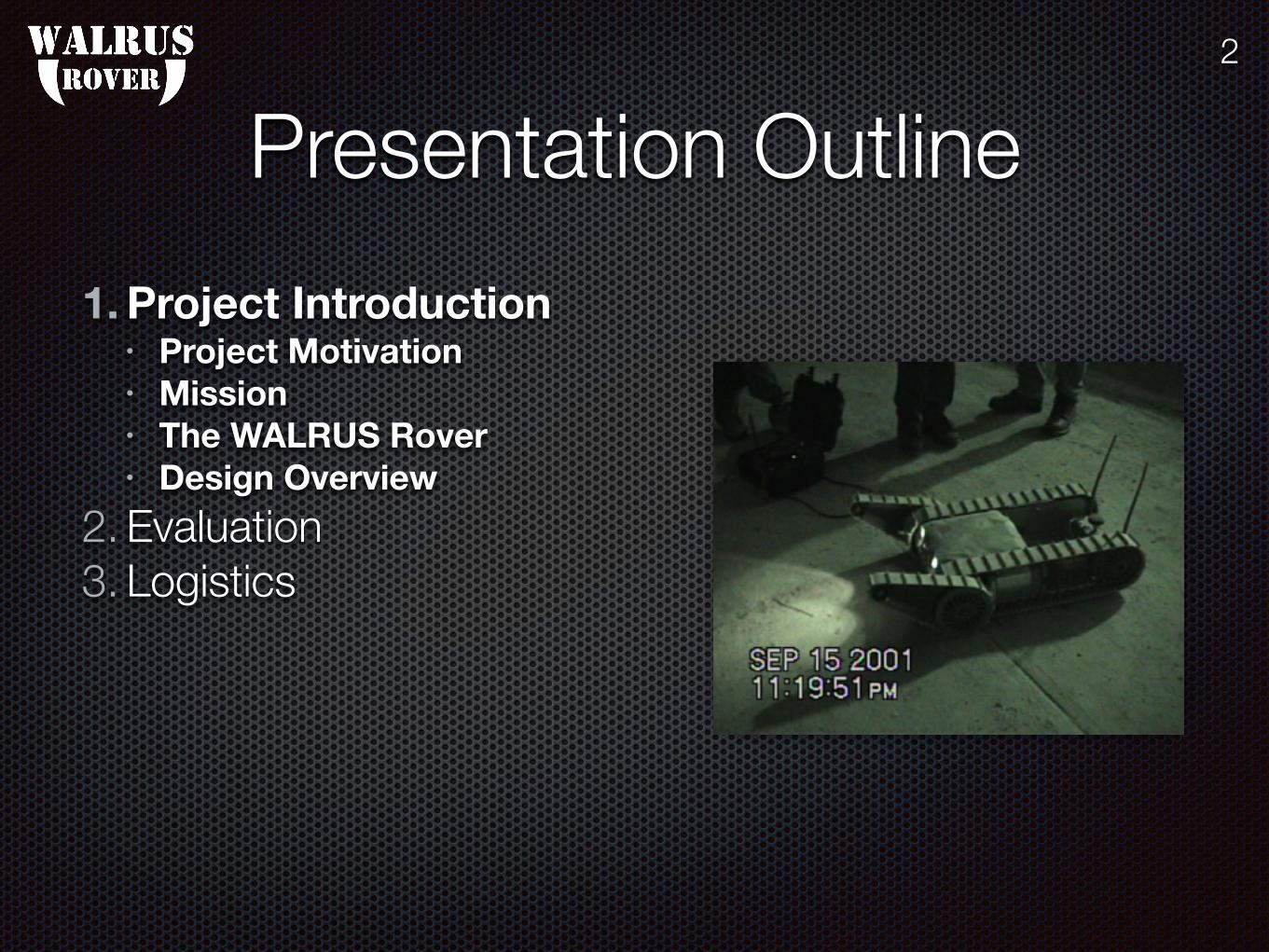
MissionTo create a highly configurable amphibious rover for
search and humanitarian missions at a competitive cost.
4
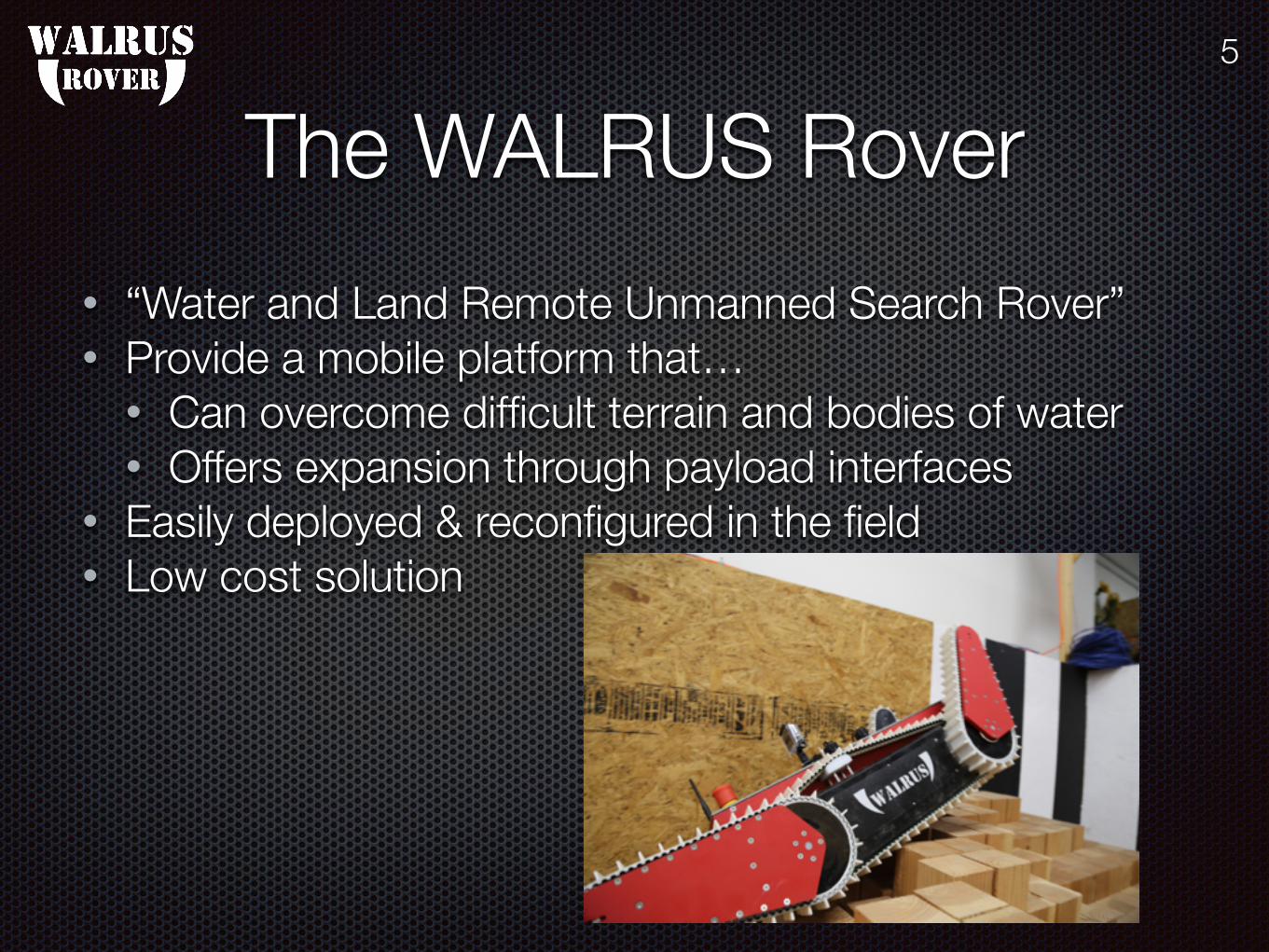
The WALRUS Rover• “Water and Land Remote Unmanned Search Rover” • Provide a mobile platform that…
• Can overcome difficult terrain and bodies of water • Offers expansion through payload interfaces
• Easily deployed & reconfigured in the field • Low cost solution
5
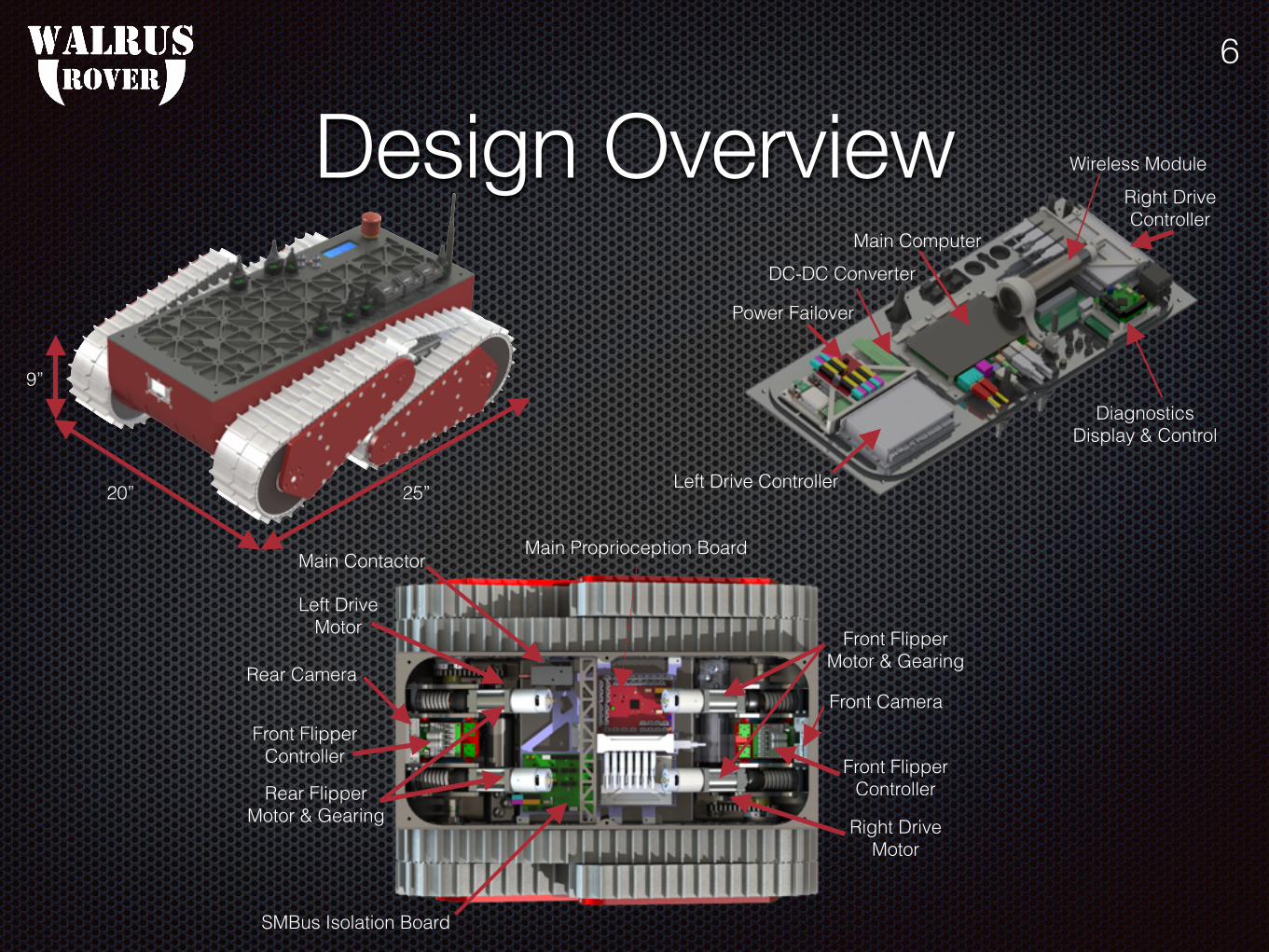
Design Overview6
Rear Camera
Rear Flipper Motor & Gearing
Left Drive Motor
Main Contactor
SMBus Isolation Board
Main Proprioception Board
Front Flipper Motor & Gearing
Front Camera
Right Drive Motor
Front Flipper Controller
Front Flipper Controller
9”
20” 25”
Main ComputerDC-DC Converter
Power Failover
Wireless ModuleRight Drive Controller
Left Drive Controller
Diagnostics Display & Control
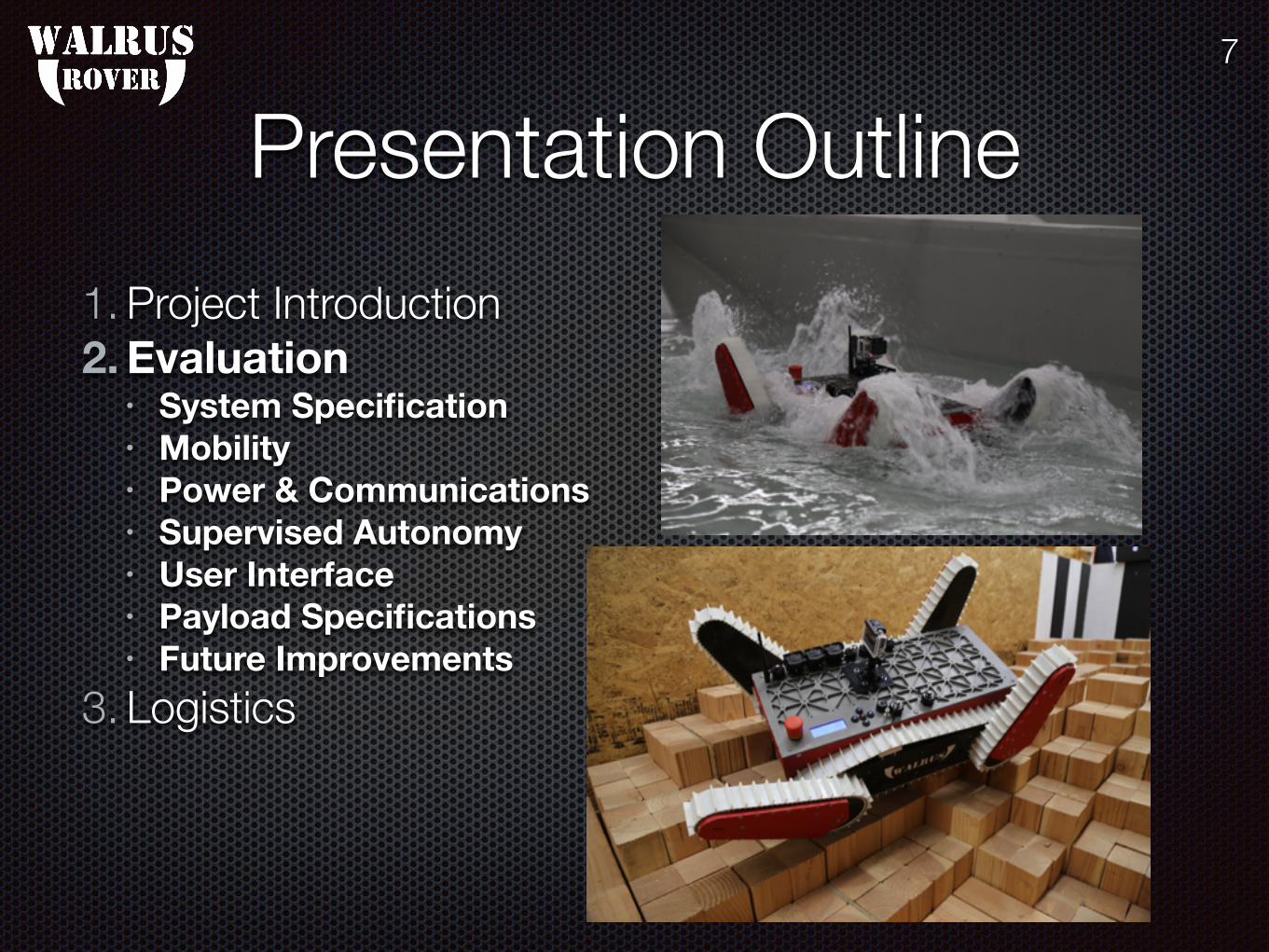
Presentation Outline1. Project Introduction 2. Evaluation
• System Specification • Mobility • Power & Communications • Supervised Autonomy • User Interface • Payload Specifications • Future Improvements
3. Logistics
7
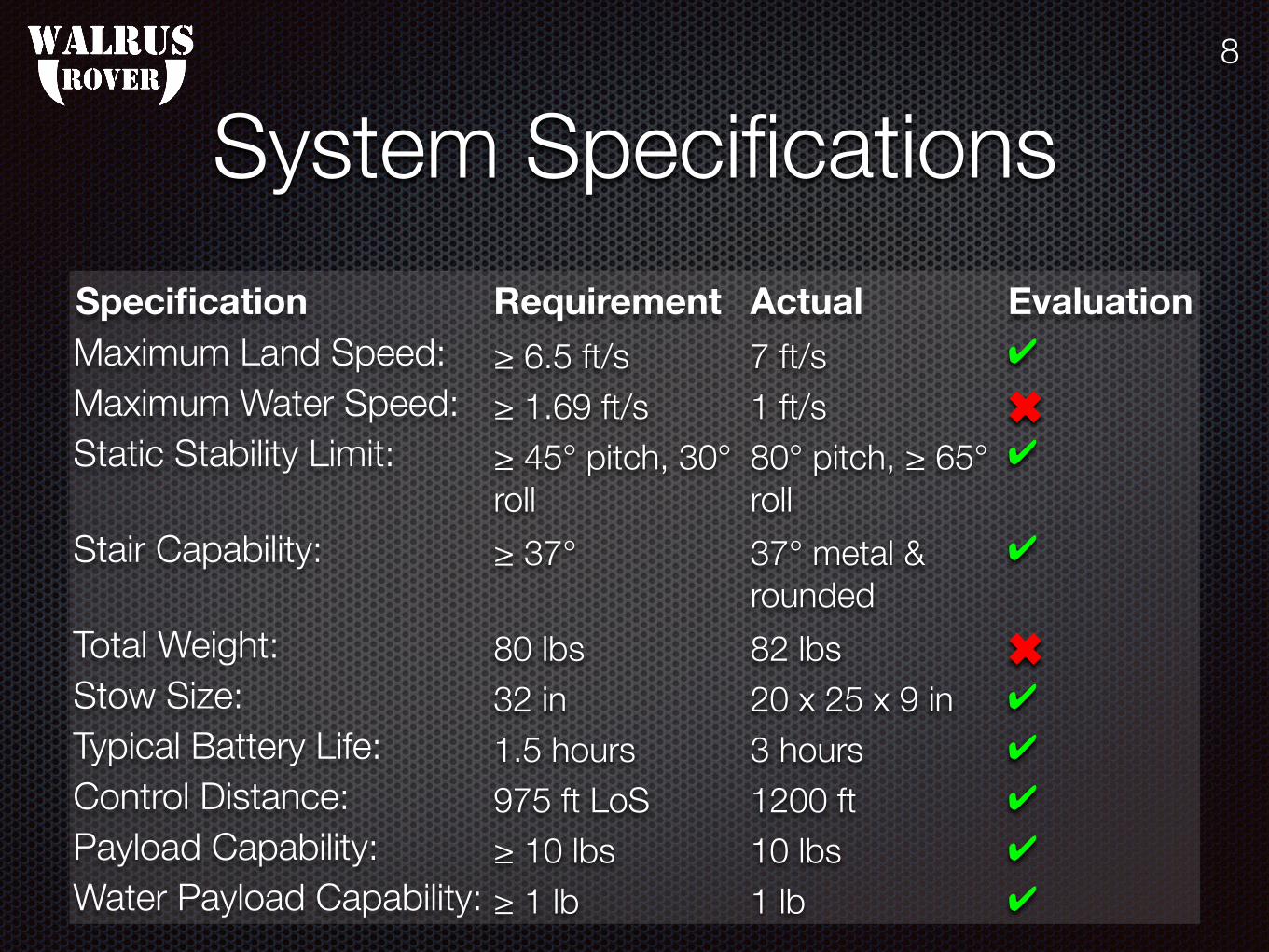
Specification Requirement Actual EvaluationMaximum Land Speed: ≥ 6.5 ft/s 7 ft/s ✔
Maximum Water Speed: ≥ 1.69 ft/s 1 ft/s ✖Static Stability Limit: ≥ 45° pitch, 30°
roll80° pitch, ≥ 65° roll
✔
Stair Capability: ≥ 37° 37° metal & rounded
✔
Total Weight: 80 lbs 82 lbs ✖Stow Size: 32 in 20 x 25 x 9 in ✔
Typical Battery Life: 1.5 hours 3 hours ✔
Control Distance: 975 ft LoS 1200 ft ✔
Payload Capability: ≥ 10 lbs 10 lbs ✔
Water Payload Capability: ≥ 1 lb 1 lb ✔
System Specifications8
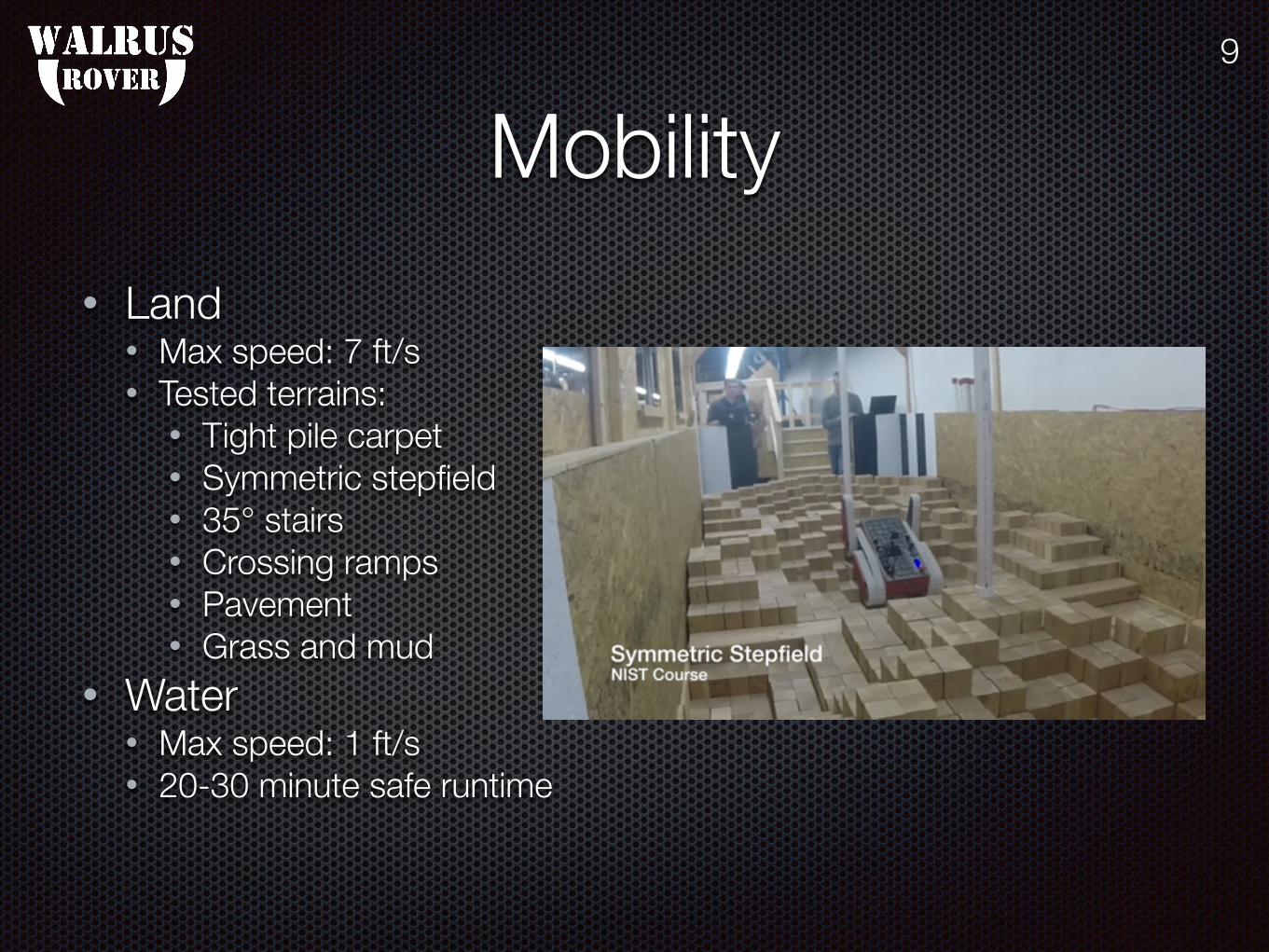
Mobility9
• Land • Max speed: 7 ft/s • Tested terrains:
• Tight pile carpet • Symmetric stepfield • 35° stairs • Crossing ramps • Pavement • Grass and mud
• Water • Max speed: 1 ft/s • 20-30 minute safe runtime
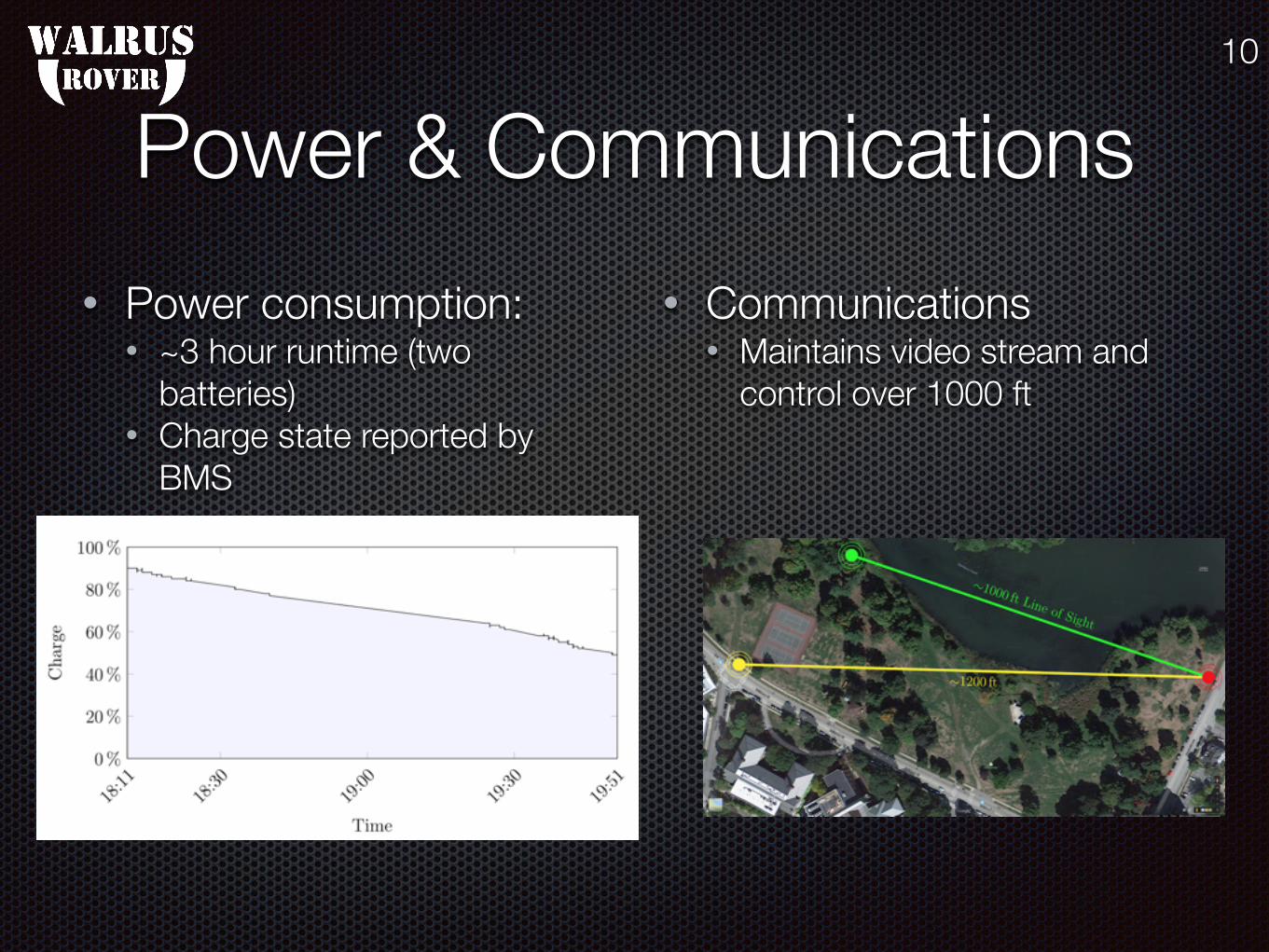
Power & Communications10
• Power consumption: • ~3 hour runtime (two
batteries) • Charge state reported by
BMS
• Communications • Maintains video stream and
control over 1000 ft
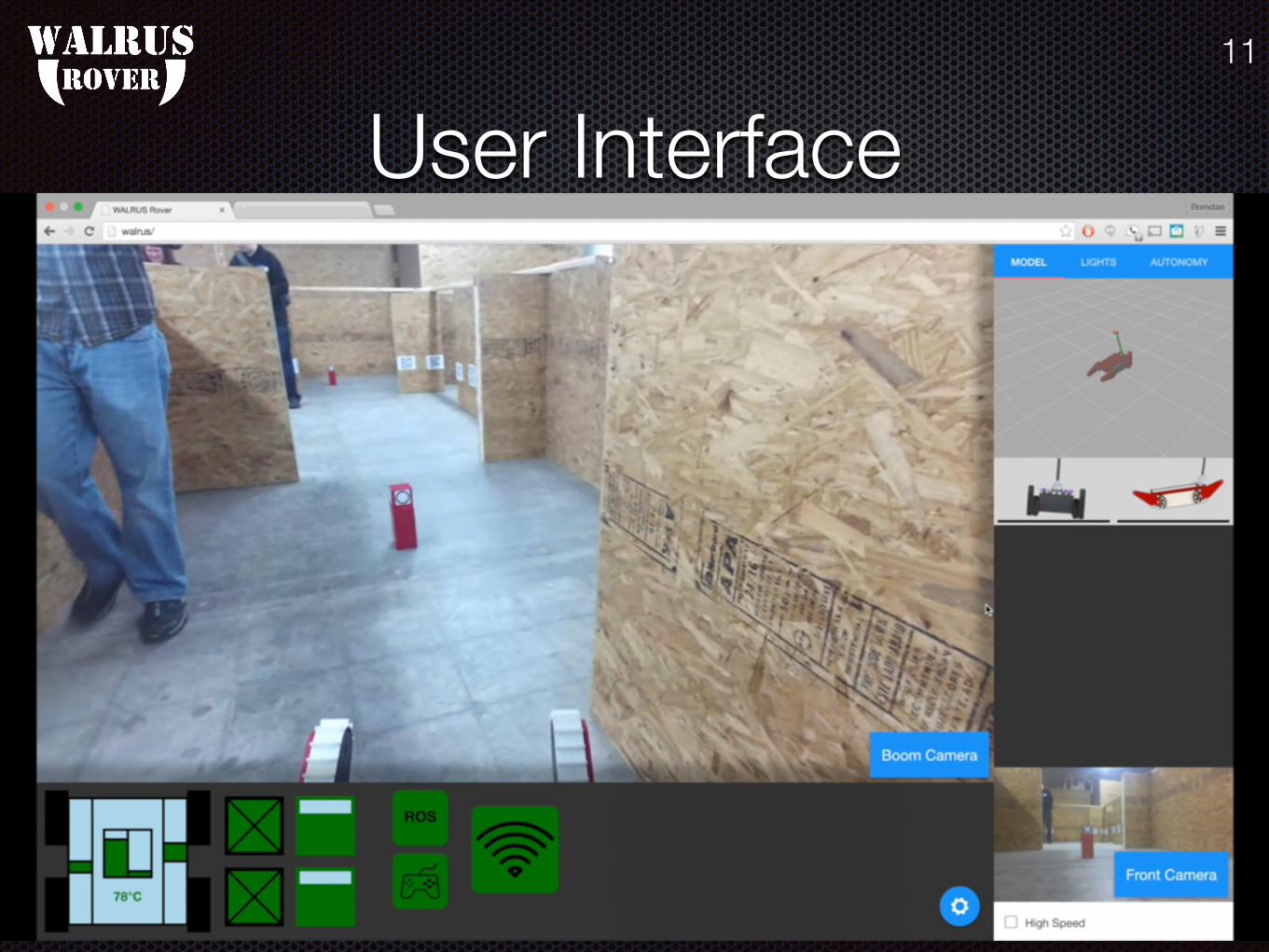
User Interface11
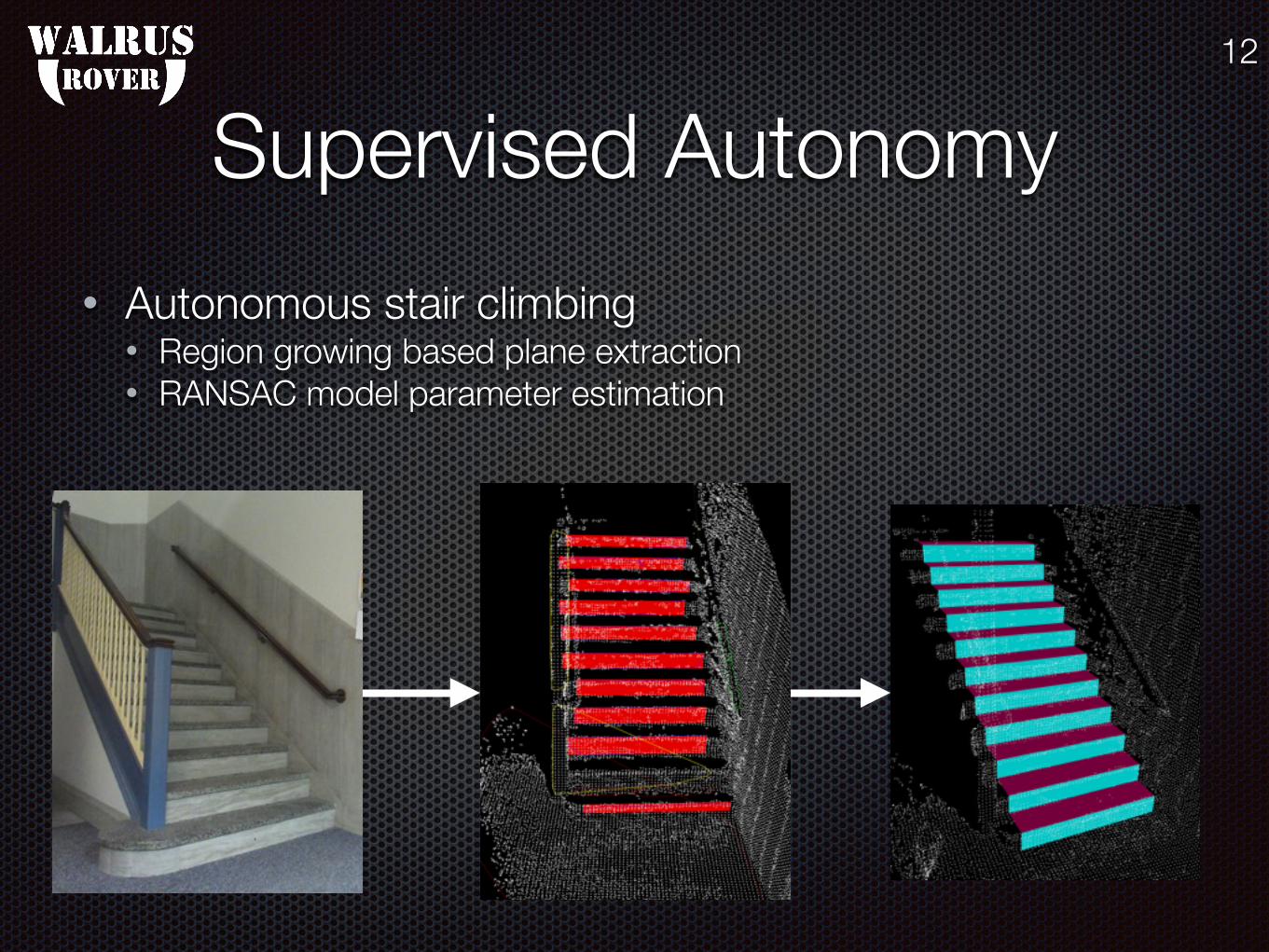
Supervised Autonomy12
• Autonomous stair climbing • Region growing based plane extraction • RANSAC model parameter estimation
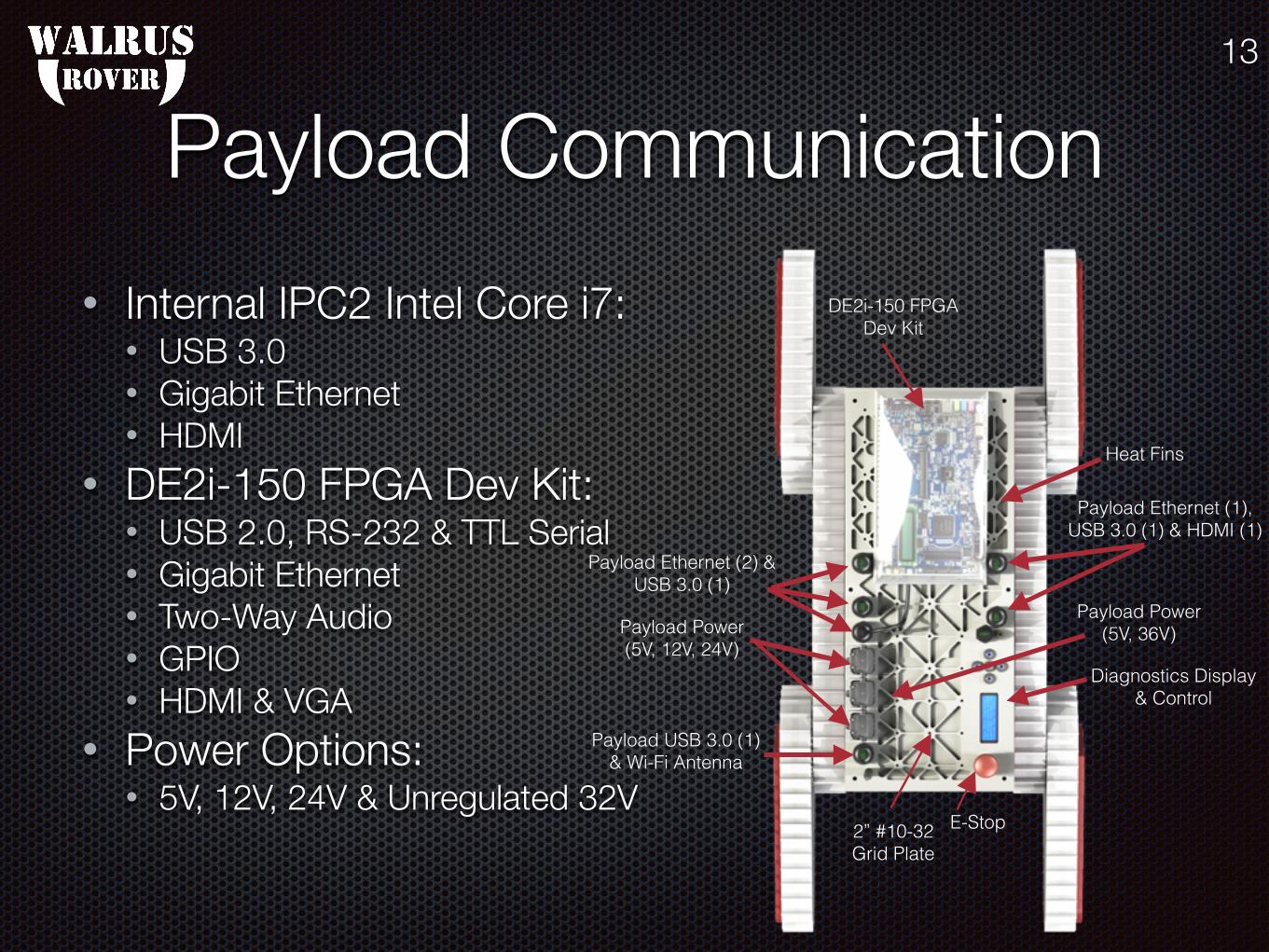
Payload Communication• Internal IPC2 Intel Core i7:
• USB 3.0 • Gigabit Ethernet • HDMI
• DE2i-150 FPGA Dev Kit: • USB 2.0, RS-232 & TTL Serial • Gigabit Ethernet • Two-Way Audio • GPIO • HDMI & VGA
• Power Options: • 5V, 12V, 24V & Unregulated 32V
13
Payload Power (5V, 12V, 24V)
Payload Power (5V, 36V)
Payload Ethernet (2) & USB 3.0 (1)
Payload Ethernet (1), USB 3.0 (1) & HDMI (1)
Payload USB 3.0 (1) & Wi-Fi Antenna
E-Stop
Diagnostics Display & Control
2” #10-32 Grid Plate
Heat Fins
DE2i-150 FPGA Dev Kit

Future Improvements• Remove weight
• Cost: 3 Months, $3,000 • Gain: Lower power required, water speed increase
• Add cowlings to treads • Cost: 1 week, $50 • Gain: Water speed increase
• Dynamic tread tensioner • Cost: 2 weeks, $200 • Gain: Better traversal over gravel
14
Presentation Outline1. Project Introduction 2. Evaluation 3. Logistics
• Gantt Chart • Outreach • Rover Costs • Sponsors
15
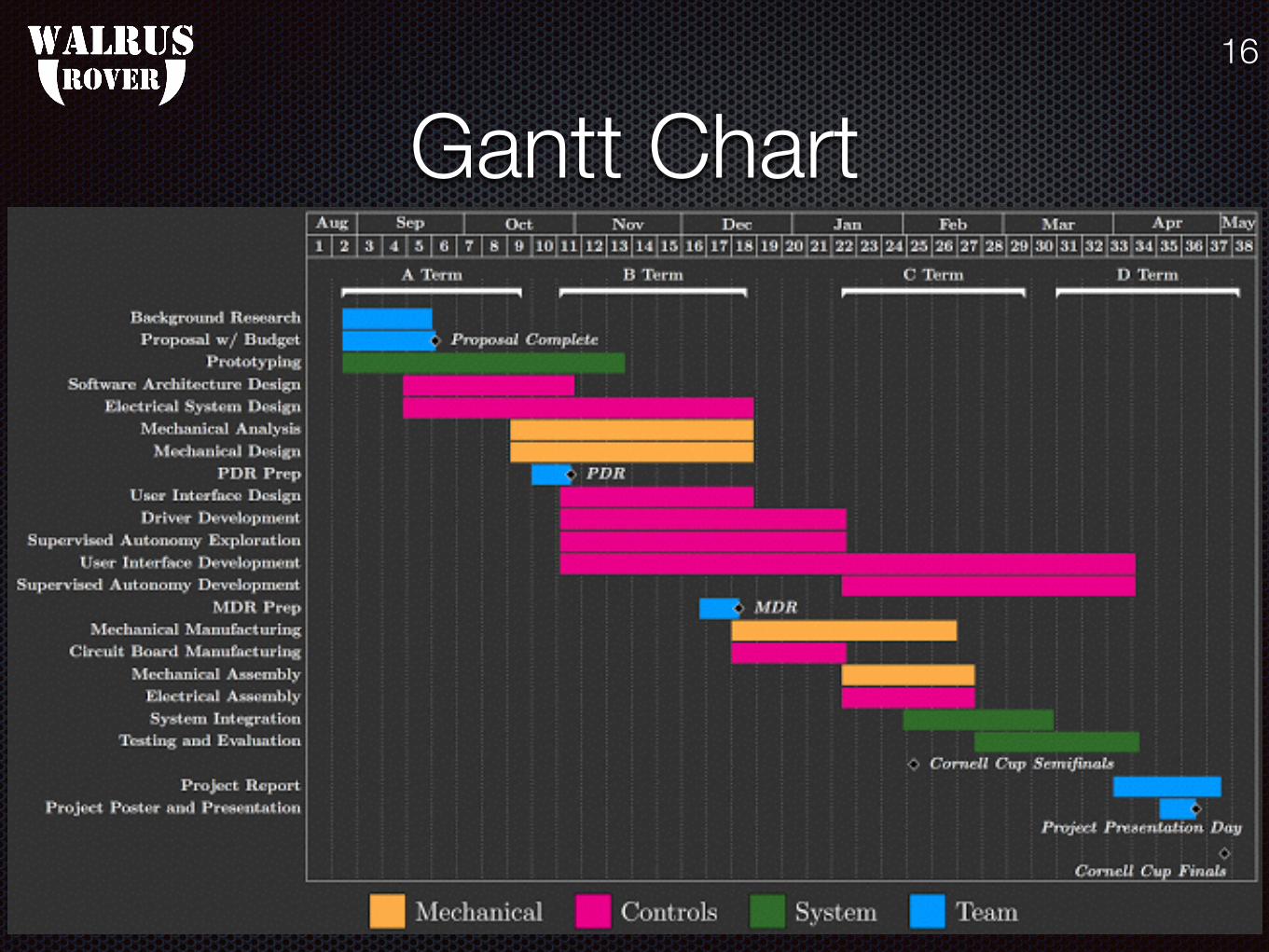
Gantt Chart16
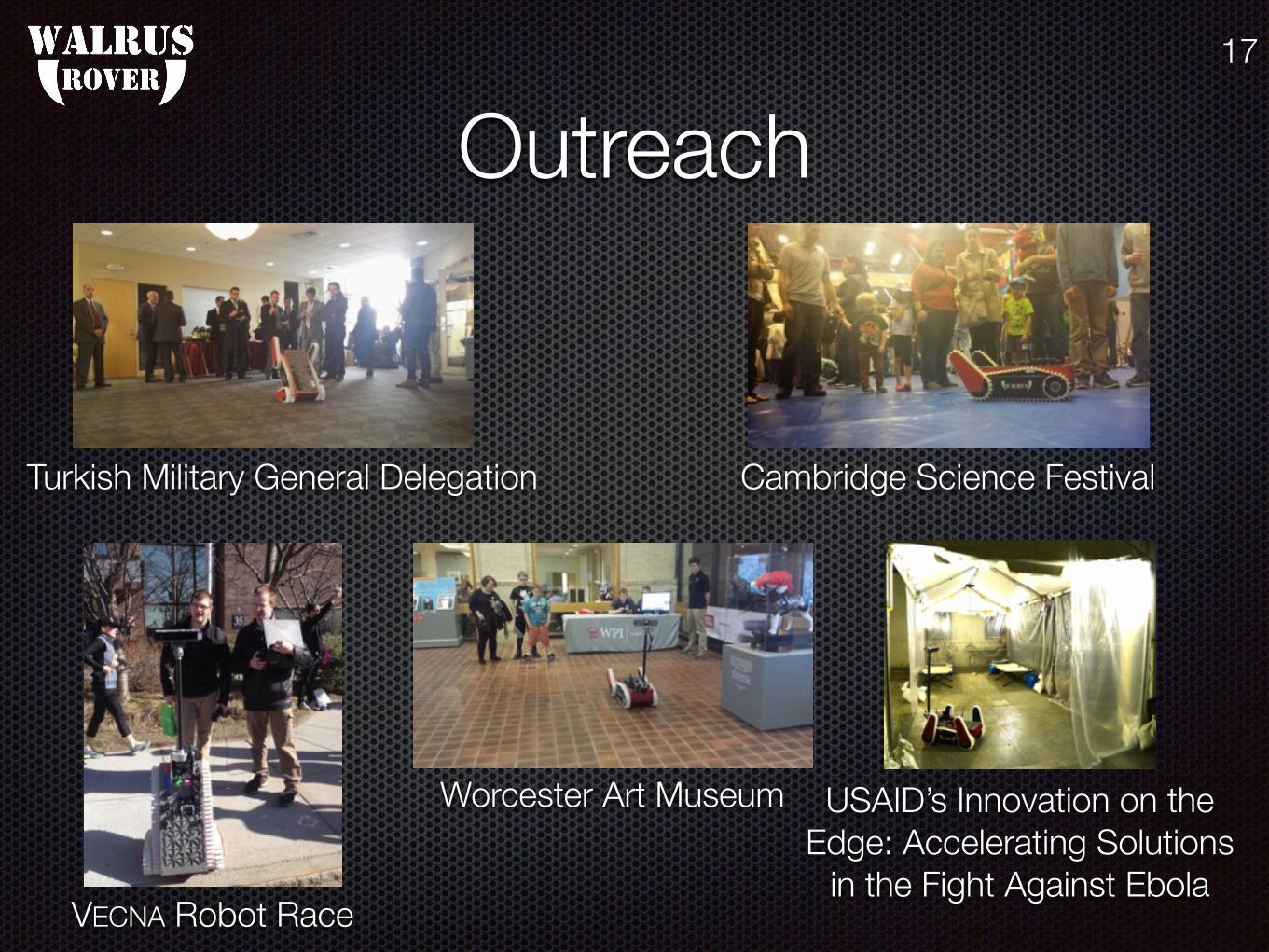
Outreach17
Worcester Art Museum
Cambridge Science Festival
VECNA Robot Race
Turkish Military General Delegation
USAID’s Innovation on the Edge: Accelerating Solutions
in the Fight Against Ebola
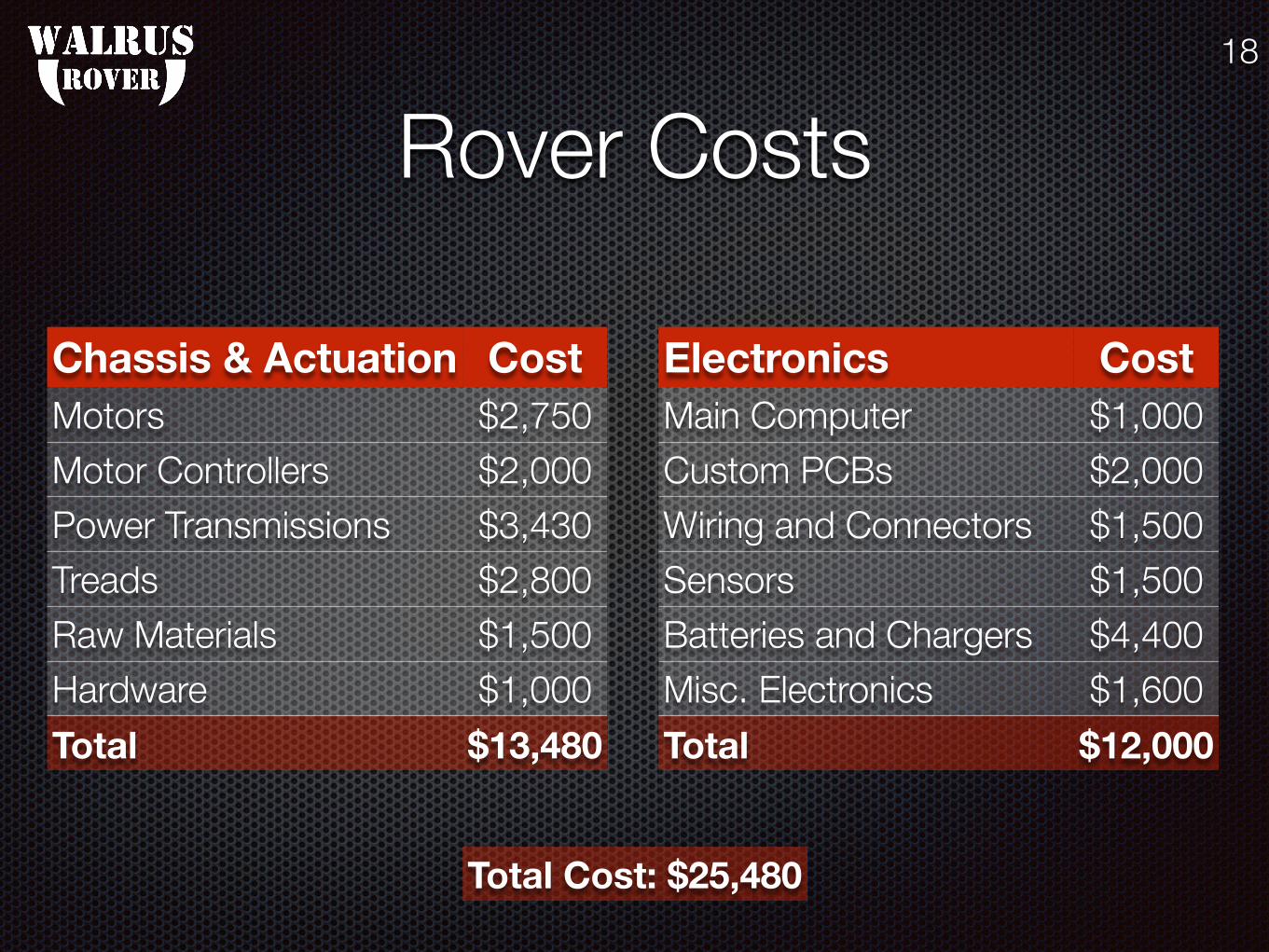
Rover Costs18
Chassis & Actuation CostMotors $2,750Motor Controllers $2,000Power Transmissions $3,430Treads $2,800Raw Materials $1,500Hardware $1,000Total $13,480
Electronics CostMain Computer $1,000Custom PCBs $2,000Wiring and Connectors $1,500Sensors $1,500Batteries and Chargers $4,400Misc. Electronics $1,600Total $12,000
Total Cost: $25,480

Sponsors19
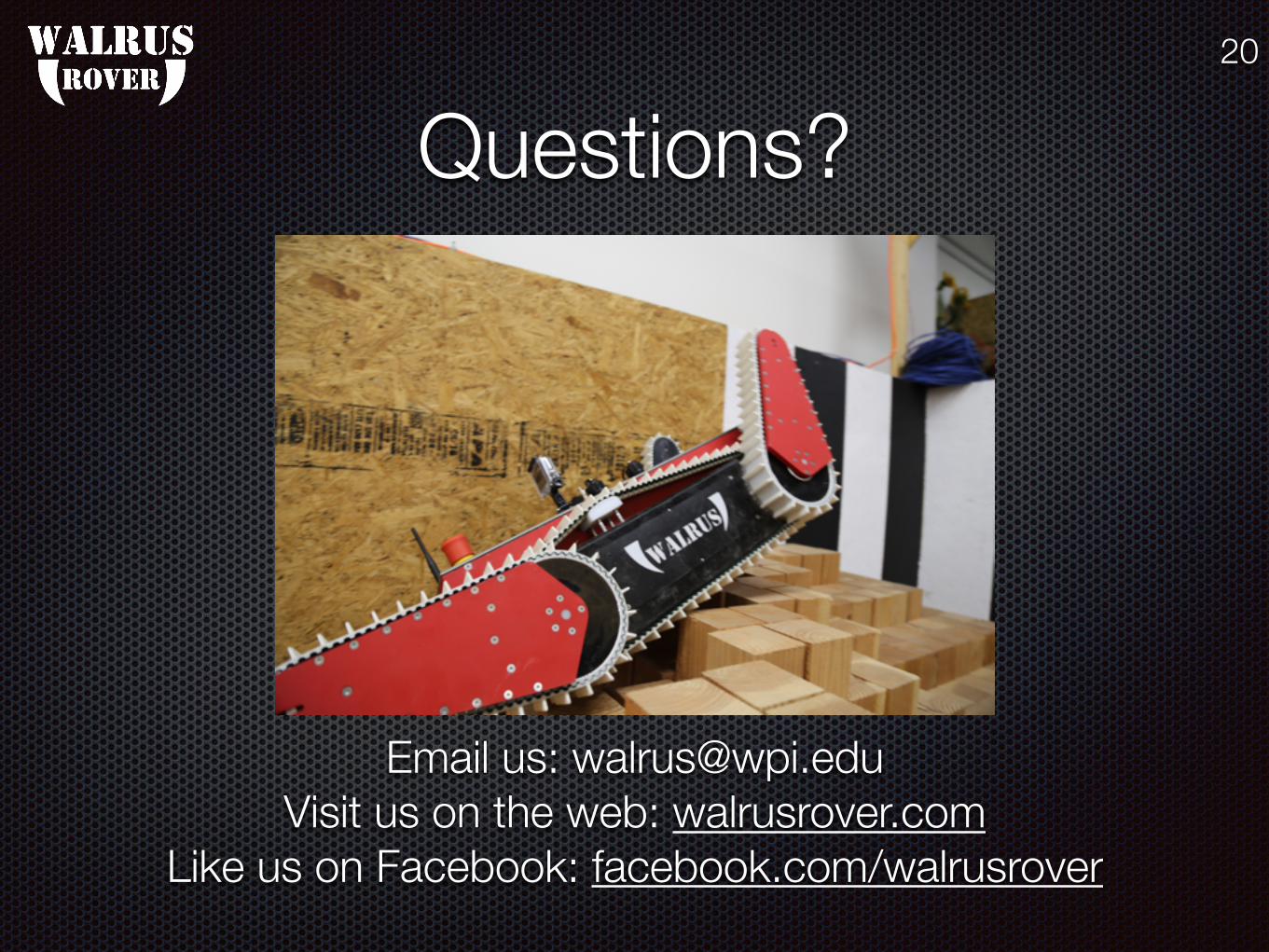
Email us: [email protected] Visit us on the web: walrusrover.com
Like us on Facebook: facebook.com/walrusrover
Questions?20









![[PPT]Amphibious Warfare Training - United States · Web viewAgenda Amphibious Doctrine Organization of the Amphibious Task Force (Navy) Amphibious Ships Organization of the Landing](https://img.pdfslide.us/doc/110x75/5aa21ccb7f8b9ac67a8caf70/pptamphibious-warfare-training-united-states-viewagenda-amphibious-doctrine.jpg)