Embed Size (px)
Citation preview

Hindawi Publishing CorporationAbstract and Applied AnalysisVolume 2011, Article ID 143079, 14 pagesdoi:10.1155/2011/143079
Research ArticleAlmost Surely Asymptotic Stability of Exact andNumerical Solutions for Neutral StochasticPantograph Equations
Zhanhua Yu
Department of Mathematics, Harbin Institute of Technology at Weihai, Weihai 264209, China
Correspondence should be addressed to Zhanhua Yu, [email protected]
Received 26 March 2011; Revised 29 June 2011; Accepted 29 June 2011
Academic Editor: Nobuyuki Kenmochi
Copyright q 2011 Zhanhua Yu. This is an open access article distributed under the CreativeCommons Attribution License, which permits unrestricted use, distribution, and reproduction inany medium, provided the original work is properly cited.
We study the almost surely asymptotic stability of exact solutions to neutral stochastic pantographequations (NSPEs), and sufficient conditions are obtained. Based on these sufficient conditions,we show that the backward Euler method (BEM) with variable stepsize can preserve the almostsurely asymptotic stability. Numerical examples are demonstrated for illustration.
1. Introduction
The neutral pantograph equation (NPE) plays important roles inmathematical and industrialproblems (see [1]). It has been studied by many authors numerically and analytically. Werefer to [1–7]. One kind of NPEs reads
[x(t) −N
(x(qt))]′ = f
(t, x(t), x
(qt)). (1.1)
Taking the environmental disturbances into account, we are led to the following neutralstochastic pantograph equation (NSPE)
d[x(t) −N
(x(qt))]
= f(t, x(t), x
(qt))dt + g
(t, x(t), x
(qt))dB(t), (1.2)
which is a kind of neutral stochastic delay differential equations (NSDDEs).Using the continuous semimartingale convergence theorem (cf. [8]), Mao et al. (see
[9, 10]) studied the almost surely asymptotic stability of several kinds of NSDDEs. As mostNSDDEs cannot be solved explicitly, numerical methods have become essential. Efficient

2 Abstract and Applied Analysis
numerical methods for NSDDEs can be found in [11–13]. The stability theory of numericalsolutions is one of fundamental research topics in the numerical analysis. The almost surelyasymptotic stability of numerical solutions for stochastic differential equations (SDEs) andstochastic functional differential equations (SFDEs) has received much more attention (see[14–19]). Corresponding to the continuous semimartingale convergence theorem (cf. [8]),the discrete semimartingale convergence theorem (cf. [17, 20]) also plays important roles inthe almost surely asymptotic stability analysis of numerical solutions for SDEs and SFDEs(see [17–19]). To our best knowledge, no results on the almost surely asymptotic stabilityof exact and numerical solutions for the NSPE (1.2) can be found. We aim in this paper tostudy the almost surely asymptotic stability of exact and numerical solutions to NSPEs byusing the continuous semimartingale convergence theorem and the discrete semimartingaleconvergence theorem. We prove that the backward Euler method (BEM) with variablestepsize can preserve the almost surely asymptotic stability under the conditions whichguarantee the almost surely asymptotic stability of the exact solution.
In Section 2, we introduce some necessary notations and elementary theories of NSPEs(1.2). Moreover, we state the discrete semimartingale convergence theorem as a lemma. InSection 3, we study the almost surely asymptotic stability of exact solutions to NSPEs (1.2).Section 4 gives the almost surely asymptotic stability of the backward Euler method withvariable stepsize. Numerical experiments are presented in the finial section.
2. Neutral Stochastic Pantograph Equation
Throughout this paper, unless otherwise specified, we use the following notations. Let(Ω,F, {Ft}t≥0, P) be a complete probability space with filtration {Ft}t≥0 satisfying the usualconditions (i.e., it is right continuous, and F0 contains all P -null sets). B(t) is a scalarBrownian motion defined on the probability space. | · | denotes the Euclidean norm in Rn.The inner product of x, y in Rn is denoted by 〈x, y〉 or xTy. If A is a vector or matrix, itstranspose is denoted by AT . If A is a matrix, its trace norm is denoted by |A| =
√trace(ATA).
Let L1([0, T];Rn) denote the family of all Rn-value measurable Ft-adapted processes f ={f(t)}0≤t≤T such that
∫T0 |f(t)|dt < ∞w.p.1. Let L2([0, T];Rn) denote the family of all Rn-value
measurable Ft-adapted processes f = {f(t)}0≤t≤T such that∫T0 |f(t)|2dt < ∞ w.p.1.
Consider an n-dimensional neutral stochastic pantograph equation
d[x(t) −N
(x(qt))]
= f(t, x(t), x
(qt))dt + g
(t, x(t), x
(qt))dB(t), (2.1)
on t ≥ 0 withF0-measurable bounded initial data x(0) = x0. Here 0 < q < 1, f : R+×Rn×Rn →Rn, g : R+ × Rn × Rn → Rn, and N : Rn → Rn.
Let C(Rn;R+) denote the family of continuous functions from Rn to R+. Let C1,2(R+ ×Rn;R+) denote the family of all nonnegative functions V (t, x) on R+ × Rn which arecontinuously once differentiable in t and twice differentiable in x. For each V ∈ C1,2(R+ ×Rn;R+), define an operator LV from R+ × Rn × Rn to R by
LV(t, x, y
)= Vt
(t, x −N
(y))
+ Vx
(t, x −N
(y))f(t, x, y
)
+12trace
[gT(t, x, y
)Vxx
(t, x −N
(y))g(t, x, y
)],
(2.2)

Abstract and Applied Analysis 3
where
Vt(t, x) =∂V (t, x)
∂t, Vx(t, x) =
(∂V (t, x)∂x1
, . . . ,∂V (t, x)∂xn
),
Vxx(t, x) =
(∂2V (t, x)∂xi∂xj
)
n×n.
(2.3)
To be precise, we first give the definition of the solution to (2.1) on 0 ≤ t ≤ T .
Definition 2.1. A Rn-value stochastic process x(t) on 0 ≤ t ≤ T is called a solution of (2.1) if ithas the following properties:
(1) {x(t)}0≤t≤T is continuous and Ft-adapted;
(2) f(t, x(t), x(qt)) ∈ L1([0, T];Rn), g(t, x(t), x(qt)) ∈ L2([0, T];Rn):
(3) x(0) = x0, and (2.1) holds for every t ∈ [0, T]with probability 1.
A solution x(t) is said to be unique if any other solution x(t) is indistinguishable from it, thatis,
P{x(t) = x(t), 0 ≤ t ≤ T} = 1. (2.4)
To ensure the existence and uniqueness of the solution to (2.1) on t ∈ [0, T], we imposethe following assumptions on the coefficients N, f , and g.
Assumption 2.2. Assume that both f and g satisfy the global Lipschitz condition and thelinear growth condition. That is, there exist two positive constants L and K such that forall x, y, x, y ∈ Rn, and t ∈ [0, T],
∣∣f(t, x, y
) − f(t, x, y
)∣∣2 ∨ ∣∣g(t, x, y
) − g(t, x, y
)∣∣2 ≤ L(|x − x|2 + ∣∣y − y
∣∣2), (2.5)
and for all x, y ∈ Rn, and t ∈ [0, T],
∣∣f(t, x, y
)∣∣2 ∨ ∣∣g(t, x, y
)∣∣2 ≤ K(1 + |x|2 + ∣∣y
∣∣2). (2.6)
Assumption 2.3. Assume that there is a constant κ ∈ (0, 1) such that
∣∣N(x) −N(y)∣∣ ≤ κ
∣∣x − y∣∣, ∀x, y ∈ Rn. (2.7)
Under Assumptions 2.2 and 2.3, the following results can be derived.

4 Abstract and Applied Analysis
Lemma 2.4. Let Assumptions 2.2 and 2.3 hold. Let x(t) be a solution to (2.1) with F0-measurablebounded initial data x(0) = x0. Then
E
(
sup0≤t≤T
|x(t)|2)
≤(
1 +(1 − κ)κ + 3
(1 − √
κ)
(1 − √
κ)2(1 − κ)
E|x0|2)
exp
{6K(T + 4)T
(1 − κ)(1 − √
κ)
}
. (2.8)
The proof of Lemma 2.4 is similar to Lemma 6.2.4 in [21], so we omit the details.
Theorem 2.5. Let Assumptions 2.2 and 2.3 hold, then for any F0-measurable bounded initial datax(0) = x0, (2.1) has a unique solution x(t) on t ∈ [0, T].
Based on Lemma 6.2.3 in [21] and Lemma 2.4, this theorem can be proved in the sameway as Theorem 6.2.2 in [21], so the details are omitted.
The discrete semimartingale convergence theorem (cf. [17, 20])will play an importantrole in this paper.
Lemma 2.6. Let {Ai} and {Ui} be two sequences of nonnegative random variables such that bothAi and Ui are Fi-measurable for i = 1, 2, . . ., and A0 = U0 = 0 a.s. Let Mi be a real-valued localmartingale with M0 = 0 a.s. Let ζ be a nonnegative F0-measurable random variable. Assume that{Xi} is a nonnegative semimartingale with the Doob-Mayer decomposition
Xi = ζ +Ai −Ui +Mi. (2.9)
If limi→∞Ai < ∞ a.s., then for almost all ω ∈ Ω:
limi→∞
Xi < ∞, limi→∞
Ui < ∞, (2.10)
that is, both Xi and Ui converge to finite random variables.
3. Almost Surely Asymptotic Stability of Neutral StochasticPantograph Equations
In this section, we investigate the almost surely asymptotic stability of (2.1). We assume (2.1)has a continuous unique global solution for given F0-measurable bounded initial data x0.Moreover, we always assume that f(t, 0, 0) = 0, g(t, 0, 0) = 0, N(0) = 0 in the followingsections. Therefore, (2.1) admits a trivial solution x(t) = 0.
To be precise, let us give the definition on the almost surely asymptotic stability of(2.1).
Definition 3.1. The solution x(t) to (2.1) is said to be almost surely asymptotically stable if
limt→∞
x(t) = 0 a.s. (3.1)
for any bounded F0-measurable bounded initial data x(0).

Abstract and Applied Analysis 5
Lemma 3.2. Let ρ : R+ → (0,∞) and z : [0,∞) → Rn be a continuous functions. Assume that
σ1 := lim supt→∞
ρ(t)ρ(qt) <
1κ
,
σ2 := lim supt→∞
[ρ(t)
∣∣z(t) −N(z(qt))∣∣] < ∞.
(3.2)
Then,
lim supt→∞
[ρ(t)|z(t)|] ≤ σ2
1 − κσ1. (3.3)
Proof. Using the idea of Lemma 3.1 in [9], we can obtain the desired result.
Lemma 3.3. Suppose that (2.1) has a continuous unique global solution x(t) for givenF0-measurablebounded initial data x0. Let Assumption 2.3 hold. Assume that there are functions U ∈ C1,2(R+ ×Rn;R+), w ∈ C(Rn;R+), and four positive constants λ1 > λ2, λ3, λ4 such that
LU(t, x, y
) ≤ −λ1w(x) + qλ2w(y),
(t, x, y
) ∈ R+ × Rn × Rn,
U(t, x −N
(y)) ≤ λ3w(x) + λ4w
(y), (t, x) ∈ R+ × Rn.
(3.4)
Then, for any ε ∈ (0, γ∗)
lim supt→∞
t(γ∗−ε)U
(t, x(t) −N
(x(qt)))
< ∞ a.s., (3.5)
where γ∗ is positive and satisfies
λ1 = λ2q−γ∗ . (3.6)
That is,
limt→∞
U(t, x(t) −N
(x(qt)))
= 0 a.s. (3.7)
Proof. Choose V (t, x(t)) = tγU(t, x(t) −N(x(qt))) for (t, x) ∈ R+ × Rn and γ > 0. Similar to theproof of Lemma 2.2 in [9], the desired conclusion can be obtained by using the continuoussemimartingale convergence theorem (cf. [8]).
Theorem 3.4. Suppose that (2.1) has a continuous unique global solution x(t) for given F0-measurable bounded initial data x0. Let Assumption 2.3 hold. Assume that there are four positiveconstants λ1 − λ4 such that
2(x −N
(y))T
f(t, x, y
) ≤ −λ1|x|2 + λ2∣∣y∣∣2,
∣∣g(t, x, y
)∣∣2 ≤ λ3|x|2 + λ4∣∣y∣∣2
(3.8)

6 Abstract and Applied Analysis
for t ≥ 0 and x, y ∈ Rn. If
λ1 − λ3 >λ2 + λ4
q, (3.9)
then, the global solution x(t) to (2.1) is almost surely asymptotically stable.
Proof. Let U(t, x) = w(x) = |x|2. Applying Lemma 3.3 and Lemma 3.2 with ρ = 1, we canobtain the desired conclusion.
Theorem 3.4 gives sufficient conditions of the almost surely asymptotic stability ofNSPEs (2.1). Based on this result, we will investigate the almost surely asymptotic stabilityof the BEM with variable stepsize for (2.1) in the following section.
4. Almost Surely Asymptotic Stability of the Backward Euler Method
To define the BEM for (2.1), we introduce a mesh H = {m; t−m, t−m+1, . . . , t0, t1, . . . , tn, . . .} asfollows. Let hn = tn+1 − tn, h−m−1 = t−m. Set t0 = γ0 > 0 and tm = q−1γ0. We define m − 1 gridpoints t1 < t2 < · · · < tm−1 in (t0, tm) by
ti = t0 + iΔ0, for i = 1, 2, . . . , m − 1, (4.1)
where Δ0 = (tm − t0)/m and define the other grid points by
tkm+i = q−kti, for k = −1, 0, 1, . . . , i = 0, 1, 2, . . . , m − 1. (4.2)
It is easy to see that the grid point tn satisfies qtn = tn−m for n ≥ 0, and the step size hn satisfies
qhn = hn−m, for n ≥ 0, limn→∞
hn = ∞. (4.3)
For the given mesh H, we define the BEM for (2.1) as follows:
Yn+1 −N(Yn+1−m) = Yn −N(Yn−m) + hnf(tn+1, Yn+1, Yn+1−m)
+ g(tn, Yn, Yn−m)ΔBn, n ≥ −m,
Y−m −N(Y−m−m) = x0 −N(x0) + h−m−1f(t−m, Y−m, Y−m−m)
+ g(0, x0, x0)B(t−m).
(4.4)
Here, Yn(n ≥ −m) is an approximation value of x(tn) and Ftn -measurable. ΔBn = B(tn+1) −B(tn) is the Brownian increment. The approximations Yn−m(n = −m,−m + 1, . . . ,−1) arecalculated by the following formulae:
Yn−m = (1 − θn)x0 + θnY−m, n = −m,−m + 1, . . . ,−1, (4.5)
where θn = qtn/t−m. As a standard hypothesis, we assume that the BEM (4.4) is well defined.

Abstract and Applied Analysis 7
To be precise, let us introduce the definition on the almost surely asymptotic stabilityof the BEM (4.4).
Definition 4.1. The approximate solution Yn to the BEM (4.4) is said to be almost surelyasymptotically stable if
limn→∞
Yn = 0 a.s. (4.6)
for any bounded F0-measurable bounded initial data x0.
Theorem 4.2. Assume that the BEM (4.4) is well defined. Let Assumption 2.3 hold. Let conditions(3.8) and (3.9) hold. Then the BEM approximate solution (4.4) obeys
limn→∞
Yn = 0 a.s. (4.7)
That is, the approximate solution Yn to the BEM (4.4) is almost surely asymptotically stable.
Proof. Set Yn = Yn −N(Yn−m). For n ≥ 0, from (4.4), we have
∣∣∣Yn+1 − hnf(tn+1, Yn+1, Yn+1−m)∣∣∣2=∣∣∣Yn + g(tn, Yn, Yn−m)ΔBn
∣∣∣2. (4.8)
Then, we can obtain that
∣∣∣Yn+1
∣∣∣2 ≤
∣∣∣Yn
∣∣∣2+ 2hn
⟨Yn+1, f(tn+1, Yn+1, Yn+1−m)
⟩+∣∣g(tn, Yn, Yn−m)ΔBn
∣∣2
+ 2⟨Yn, g(tn, Yn, Yn−m)
⟩ΔBn,
(4.9)
which subsequently leads to
∣∣∣Yn+1
∣∣∣2 ≤
∣∣∣Yn
∣∣∣2+ 2hn
⟨Yn+1, f(tn+1, Yn+1, Yn+1−m)
⟩
+∣∣g(tn, Yn, Yn−m)
∣∣2hn +mn,
(4.10)
where
mn = 2⟨Yn, g(tn, Yn, Yn−m)
⟩ΔBn +
∣∣g(tn, Yn, Yn−m)∣∣2(ΔB2
n − hn
). (4.11)
By conditions (3.8) and (3.9), we have
∣∣∣Yn+1
∣∣∣2 ≤
∣∣∣Yn
∣∣∣2 − λ1hn|Yn+1|2 + λ2hn|Yn+1−m|2
+(λ3|Yn|2 + λ4|Yn−m|2
)hn +mn.
(4.12)

8 Abstract and Applied Analysis
Using the equality |a + b|2 ≤ 2|a|2 + 2|b|2, we obtain that
∣∣∣Yn+1
∣∣∣2 ≥ 1
2|Yn+1|2 − |N(Yn+1−m)|2,
∣∣∣Yn
∣∣∣2 ≤ 2|Yn|2 + 2|N(Yn−m)|2.
(4.13)
Inserting these inequalities to (4.12) and using Assumption 2.3 yield
(12+ λ1hn
)|Yn+1|2 ≤ (2 + λ3hn)|Yn|2 +
(κ2 + λ2hn
)|Yn+1−m|2
+(2κ2 + λ4hn
)|Yn−m|2 +mn.
(4.14)
Let An = 1 + 2λ1hn, Bn = 3 − 2λ1hn + 2λ3hn, Cn = 2κ2 + 2λ2hn, and Dn = 4κ2 + 2λ4hn. Usingthese notations, (4.14) implies that
|Yn+1|2 − |Yn|2 ≤ Bn
An|Yn|2 + Cn
An|Yn+1−m|2 + Dn
An|Yn−m|2 + 2
Anmn. (4.15)
Then, we can conclude that
|Yn|2 ≤ |Y0|2 +n−1∑
i=0
Bi
Ai|Yi|2 +
n−1∑
i=0
Ci
Ai|Yi+1−m|2 +
n−1∑
i=0
Di
Ai|Yi−m|2 +
n−1∑
i=0
2Ai
mi. (4.16)
Note that
n−1∑
i=0
Ci
Ai|Yi+1−m|2 =
n−m∑
i=−m+1
Ci+m−1Ai+m−1
|Yi|2
=−1∑
i=−m+1
Ci+m−1Ai+m−1
|Yi|2 +n−1∑
i=0
Ci+m−1Ai+m−1
|Yi|2 −n−1∑
i=n−m+1
Ci+m−1Ai+m−1
|Yi|2,
n−1∑
i=0
Di
Ai|Yi−m|2 =
n−m−1∑
i=−m
Di+m
Ai+m|Yi|2
=−1∑
i=−m
Di+m
Ai+m|Yi|2 +
n−1∑
i=0
Di+m
Ai+m|Yi|2 −
n−1∑
i=n−m
Di+m
Ai+m|Yi|2.
(4.17)

Abstract and Applied Analysis 9
We, therefore, have
|Yn|2 +n−1∑
i=n−m+1
Ci+m−1Ai+m−1
|Yi|2 +n−1∑
i=n−m
Di+m
Ai+m|Yi|2
≤ |Y0|2 +−1∑
i=−m+1
Ci+m−1Ai+m−1
|Yi|2 +−1∑
i=−m
Di+m
Ai+m|Yi|2
+n−1∑
i=0
(Bi
Ai+Ci+m−1Ai+m−1
+Di+m
Ai+m
)|Yi|2 +
n−1∑
i=0
2Ai
mi.
(4.18)
Similar to (4.15), from (4.4), we can obtain that
|Y0|2 − |Y−1|2 ≤ B−1A−1
|Y−1|2 + C−1A−1
|Y−m|2
+D−1A−1
[2(1 − θ−1)
2|x0|2 + 2θ2−1|Y−m|2
]+
2A−1
m−1,
|Yn|2 − |Yn−1|2 ≤ Bn−1An−1
|Yn−1|2 + Cn−1An−1
[2(1 − θn)
2|x0|2 + 2θ2n|Y−m|2
]
+Dn−1An−1
[2(1 − θn−1)
2|x0|2 + 2θ2n−1|Y−m|2
]
+2
An−1mn−1, −m + 1 ≤ n ≤ −1,
|Y−m|2 − |x0|2 ≤ B−m−1 +D−m−1A−m−1
|x0|2 + C−m−1A−m−1
[2(1 − θ−m)
2|x0|2 + 2θ2−m|Y−m|2
]
+2
A−m−1m−m−1,
(4.19)
where An, Bn, Cn,Dn (n = −m − 1, . . . ,−1) are defined as before,
mn = 2⟨Yn −N(Yn−m), g(tn, Yn, Yn−m)
⟩ΔBn
+∣∣g(tn, Yn, Yn−m)
∣∣2(ΔB2
n − hn
), −m ≤ n ≤ −1,
m−m−1 = 2⟨x0 −N(x0), g(0, x0, x0)
⟩B(t−m) +
∣∣g(0, x0, x0)∣∣2(B2(t−m) − t−m
).
(4.20)
From (4.19), we have
|Y0|2 ≤ A|x0|2 + B|Y−m|2 +−1∑
i=−m+1
Bi
Ai|Yi|2 +
−1∑
i=−m−1
2Ai
mi, (4.21)

10 Abstract and Applied Analysis
where
A = 1 +B−m−1 +D−m−1
A−m−1+
−1∑
i=−m
2Di
Ai
((1 − θi)
2)+
−2∑
i=−m−1
2Ci
Ai
((1 − θi+1)
2),
B =B−mA−m
+B−1A−1
+−1∑
i=−m
2Di
Aiθ2i +
−2∑
i=−m−1
2Ci
Aiθ2i+1.
(4.22)
Obviously A > 0. By (4.18) and (4.21), we can obtain that
|Yn|2 +n−1∑
i=n−m+1
Ci+m−1Ai+m−1
|Yi|2 +n−1∑
i=n−m
Di+m
Ai+m|Yi|2
≤ A|x0|2 +(B +
D0
A0
)|Y−m|2 +
n−1∑
i=−m+1
(Bi
Ai+Ci+m−1Ai+m−1
+Di+m
Ai+m
)|Yi|2 +Mn,
(4.23)
where Mn =∑n−1
i=−m−1(2/Ai)mi. Similar to the proof in [18], we can obtain that Mn is amartingale with M−m−1 = 0. Note that hi+m−1 ≤ hi+m and hi+m = hi/q for i ≥ −m. Then,we have
Bi
Ai+Ci+m−1Ai+m−1
+Di+m
Ai+m≤(3 + 6κ2) − 2(λ1hi − λ3hi − λ2hi+m−1 − λ4hi+m)
1 + 2λ1hi
≤ 11 + 2λ1hi
{(3 + 6κ2
)− 2
(λ1 − λ3 − λ2
q− λ4
q
)hi
}.
(4.24)
Using the condition (3.9) and limi→∞hi = ∞, we obtain that there exists an integer i∗ suchthat
Bi
Ai+Ci+m−1Ai+m−1
+Di+m
Ai+m≥ 0, i ≤ i∗,
Bi
Ai+Ci+m−1Ai+m−1
+Di+m
Ai+m< 0, i > i∗.
(4.25)
Set U−m−1 = 0,
U−m =
⎧⎪⎪⎨
⎪⎪⎩
(B +
D0
A0
)|Y−m|2 if
(B +
D0
A0
)> 0,
0 if(B +
D0
A0
)≤ 0,

Abstract and Applied Analysis 11
Un =
⎧⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎩
U−m +n−1∑
i=−m+1
(Bi
Ai+Ci+m−1Ai+m−1
+Di+m
Ai+m
)|Yi|2 if −m + 1 ≤ n ≤ i∗ + 1,
U−m +i∗∑
i=−m+1
(Bi
Ai+Ci+m−1Ai+m−1
+Di+m
Ai+m
)|Yi|2 if n > i∗ + 1,
Vn =
⎧⎪⎪⎨
⎪⎪⎩
0 if −m − 1 ≤ n ≤ i∗ + 1,
−n−1∑
i=i∗+1
(Bi
Ai+Ci+m−1Ai+m−1
+Di+m
Ai+m
)|Yi|2 if n > i∗ + 1.
(4.26)
Obviously,
limn→∞
Un = U−m +i∗∑
i=−m+1
(Bi
Ai+Ci+m−1Ai+m−1
+Di+m
Ai+m
)|Yi|2 < ∞, a.s. (4.27)
Moreover, (4.23) implies that
|Yn|2 ≤ C|x0|2 +Un − Vn +Mn. (4.28)
Here C = max{A, 1}. According to (4.27), using Lemma 2.6 yields
lim supn→∞
|Yn|2 < ∞ a.s., limn→∞
Vn < ∞ a.s. (4.29)
Then, we have
limi→∞
−(Bi
Ai+Ci+m−1Ai+m−1
+Di+m
Ai+m
)|Yi|2 = 0 a.s. (4.30)
Note that
limi→∞
−(Bi
Ai+Ci+m−1Ai+m−1
+Di+m
Ai+m
)=
λ1 − λ2 − λ3 − λ4λ1
> 0. (4.31)
We therefore obtain that
limn→∞
|Yn|2 = 0 a.s. (4.32)
Then, the desired conclusion is obtained. This completes the proof.
5. Numerical Experiments
In this section, we present numerical experiments to illustrate theoretical results of stabilitypresented in the previous sections.

12 Abstract and Applied Analysis
0 2 4 6 8 10 12−0.5
0
0.5
1
1.5
2
2.5
tn
Yn
Yn(ω1)Yn(ω2)Yn(ω3)
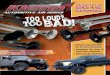
Figure 1: Almost surely asymptotic stability with x0 = 2, t0 = 0.01, m = 2.
0 1 2 3 4 5 6 7 8−2
0
2
4
6
8
10
tn
Yn
Yn(ω1)Yn(ω2)Yn(ω3)
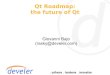
Figure 2: Almost surely asymptotic stability with x0 = 10, t0 = 1, m = 1.
Consider the following scalar problem:
d
[x(t) − 1
2x(0.5t)
]= (−8x(t) + x(0.5t))dt + sin(x(0.5t))dB(t), t ≥ 0,
x(0) = x0.
(5.1)

Abstract and Applied Analysis 13
For the test (5.1), we have λ1 = 11, λ2 = 4, λ3 = 0, and λ4 = 1 corresponding to Theorem 3.4.By Theorem 3.4, the solution to (5.1) is almost surely asymptotically stable.
Theorem 4.2 shows that the BEM approximation to (5.1) is almost surely asymp-totically stable. In Figure 1, We compute three different paths (Yn(ω1), Yn(ω2), Yn(ω3))using the BEM (4.4) with x0 = 2, t0 = 0.01, m = 2. In Figure 2, three different paths(Yn(ω1), Yn(ω2), Yn(ω3)) of BEM approximations are computed with x0 = 10, t0 = 1, m = 1.The results demonstrate that these paths are asymptotically stable.
Acknowledgments
The author would like to thank the referees for their helpful comments and suggestions.
References
[1] A. Iserles, “On the generalized pantograph functional-differential equation,” The European Journal ofApplied Mathematics, vol. 4, no. 1, pp. 1–38, 1993.
[2] M. Huang and S. Vandewalle, “Discretized stability and error growth of the nonautonomouspantograph equation,” SIAM Journal on Numerical Analysis, vol. 42, no. 5, pp. 2020–2042, 2005.
[3] W. Wang and S. Li, “On the one-leg h-methods for solving nonlinear neutral functional differentialequations,” Applied Mathematics and Computation, vol. 193, pp. 285–301, 2007.
[4] Y. Liu, “Asymptotic behaviour of functional-differential equations with proportional time delays,”The European Journal of Applied Mathematics, vol. 7, no. 1, pp. 11–30, 1996.
[5] T. Koto, “Stability of Runge-Kutta methods for the generalized pantograph equation,” NumerischeMathematik, vol. 84, no. 2, pp. 233–247, 1999.
[6] A. Bellen, S. Maset, and L. Torelli, “Contractive initializing methods for the pantograph equation ofneutral type,” in Recent Trends in Numerical Analysis, vol. 3, pp. 35–41, 2000.
[7] S. F. Ma, Z. W. Yang, and M. Z. Liu, “Hα-stability of modified Runge-Kutta methods for nonlinearneutral pantograph equations,” Journal of Mathematical Analysis and Applications, vol. 335, no. 2, pp.1128–1142, 2007.
[8] R. S. Lipster and A. N. Shiryayev, Theory of Martingale, Horwood, Chichester, UK, 1989.[9] X. Mao, “Asymptotic properties of neutral stochastic differential delay equations,” Stochastics and
Stochastics Reports, vol. 68, no. 3-4, pp. 273–295, 2000.[10] X. Mao, Y. Shen, and C. Yuan, “Almost surely asymptotic stability of neutral stochastic differential
delay equations with Markovian switching,” Stochastic Processes and Their Applications, vol. 118, no. 8,pp. 1385–1406, 2008.
[11] S. Gan, H. Schurz, and H. Zhang, “Mean square convergence of stochastic θ-methods for nonlinearneutral stochastic differential delay equations,” International Journal of Numerical Analysis andModeling, vol. 8, no. 2, pp. 201–213, 2011.
[12] S. Zhou and F. Wu, “Convergence of numerical solutions to neutral stochastic delay differentialequations with Markovian switching,” Journal of Computational and Applied Mathematics, vol. 229, no.1, pp. 85–96, 2009.
[13] B. Yin and Z. Ma, “Convergence of the semi-implicit Euler method for neutral stochastic delaydifferential equations with phase semi-Markovian switching,” Applied Mathematical Modelling, vol.35, no. 5, pp. 2094–2109, 2011.
[14] S. Pang, F. Deng, and X. Mao, “Almost sure and moment exponential stability of Euler-Maruyamadiscretizations for hybrid stochastic differential equations,” Journal of Computational and AppliedMathematics, vol. 213, no. 1, pp. 127–141, 2008.
[15] D. J. Higham, X. Mao, and C. Yuan, “Almost sure and moment exponential stability in the numericalsimulation of stochastic differential equations,” SIAM Journal on Numerical Analysis, vol. 45, no. 2, pp.592–607, 2007.
[16] Y. Saito and T. Mitsui, “T-stability of numerical scheme for stochastic differential equaions,” inContributions in Numerical Mathematics, vol. 2 of World Scientific Series in Applicable Analysis, pp. 333–344, 1993.

14 Abstract and Applied Analysis
[17] A. Rodkina and H. Schurz, “Almost sure asymptotic stability of drift-implicit θ-methods for bilinearordinary stochastic differential equations in R
1,” Journal of Computational and Applied Mathematics, vol.180, no. 1, pp. 13–31, 2005.
[18] F.Wu, X.Mao, and L. Szpruch, “Almost sure exponential stability of numerical solutions for stochasticdelay differential equations,” Numerische Mathematik, vol. 115, no. 4, pp. 681–697, 2010.
[19] Q. Li and S. Gan, “Almost sure exponential stability of numerical solutions for stochastic delaydifferential equations with jumps,” Journal of Applied Mathematics and Computing. In press.
[20] A. N. Shiryayev, Probablity, Springer, Berlin, Germany, 1996.[21] X. Mao, Stochastic Differential Equations and Their Applications, Horwood, New York, NY, USA, 1997.

Submit your manuscripts athttp://www.hindawi.com
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
CombinatoricsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Stochastic AnalysisInternational Journal of