Embed Size (px)
Citation preview

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: REGULAR PAPERS 1
Algorithmic Construction of Lyapunov Functions forPower System Stability Analysis
Marian Anghel, Federico Milano, Senior Member, IEEE, and Antonis Papachristodoulou, Member, IEEE
Abstract—We present a methodology for the algorithmic con-struction of Lyapunov functions for the transient stability analysisof classical power system models. The proposed methodology usesrecent advances in the theory of positive polynomials, semidefiniteprogramming, and sum of squares decomposition, which have beenpowerful tools for the analysis of systems with polynomial vectorfields. In order to apply these techniques to power grid systemsdescribed by trigonometric nonlinearities we use an algebraic re-formulation technique to recast the system’s dynamics into a set ofpolynomial differential algebraic equations. We demonstrate theapplication of these techniques to the transient stability analysis ofpower systems by estimating the region of attraction of the stableoperating point. An algorithm to compute the local stability Lya-punov function is described together with an optimization algo-rithm designed to improve this estimate.
Index Terms—Lyapunov methods, nonlinear systems, powersystem transient stability, sum of squares, transient energy func-tion.
I. INTRODUCTION
A traditional approach to transient stability analysis ofpower systems involves the numerical integration of the
nonlinear differential equations describing the complicatedinteractions between its components. This method provides anaccurate description of transient phenomena but its computa-tional cost prevents time-domain simulations from providingreal-time transient stability assessments and significantly con-straints the number of cases which can be analyzed [1].Alternative approaches to transient stability analysis have
been intensively explored [1]–[5]. Among the methods pro-posed, the so-called direct methods avoid the expensivetime-domain integration of the post-fault system dynamics.These methods rely on the estimation of the stability domain
Manuscript received July 20, 2012; revised November 01, 2012 and January07, 2013; accepted January 14, 2013. The work of M. Anghel was supportedin part by the U.S. Department of Energy through the LANL/LDRD Program.The work of F. Milano was supported in part by the Ministry of Science andInnovation of Spain, MICINN Projects ENE2009-07685 and ENE2012-31326.The work of A. Papachristodoulou was supported in part by the Engineeringand Physical Sciences Research Council projects EP/J012041/1, EP/I031944/1,EP/J010537/1, and EP/H03062X/1. This paper was recommended by AssociateEditor X. Li.M. Anghel is with the CCS Division, Los Alamos National Laboratory, Los
Alamos, NM 87545 USA (e-mail: [email protected]).F. Milano is with the Department of Electrical Engineering, University
of Castilla-La Mancha, 13071 Ciudad Real, Spain (e-mail: [email protected]).A. Papachristodoulou is with the Department of Engineering Science, Uni-
versity of Oxford, OX1 3PJ, U.K. (e-mail: [email protected]).Color versions of one or more of the figures in this paper are available online
at http://ieeexplore.ieee.org.Digital Object Identifier 10.1109/TCSI.2013.2246233
of the post-fault equilibrium point. If the initial state of thepost-fault system lies inside this stability domain, then we canassert without numerically integrating the post-fault trajectorythat the system will eventually converge to its post-fault equi-librium point. This inference is made by comparing the value ofa carefully chosen scalar state function (energy and Lyapunovfunctions) at the clearing time to a critical value. In practice,finding analytical energy and Lyapunov functions for transientstability analysis has encountered significant difficulties. Forexample, the energy function approach to transient stabilityanalysis relies on two strong requirements. First, we shouldbe able to define an analytic energy function. This conditionis generally violated in practice since energy functions forpower systems with transfer conductances do not exist [5], [6].Thus, for systems with losses, no analytical expressions areavailable for the estimated stability boundary of the operatingpoint. Second, we should reliably compute the critical energyvalue. This task is also very difficult and can provide inaccu-rate stability assessments if it returns the wrong critical value[7]. The closest Unstable Equilibrium Point (UEP) methodprovides sufficient but not necessary conditions for stabilityand is conservative. This method requires the identification ofall equilibrium points located on the boundary of the stabilityregion. This requires a significant computational effort andit is impractical, but it offers mathematical guarantees. Thecontrolling UEP provides less conservative estimates of thestability boundary than the closest UEP. It is generally verydifficult to find the controlling UEP relative to the fault-ontrajectory [7]. Nevertheless, a systematic method called theboundary of stability region based controlling UEP method(BCU method) has been developed to find this point [8], [9].Extensive numerical simulations have found counter-exam-ples [10] where the BCU method fails to give the correctanswer, predicting stability for systems that in fact suffer fromsecond-swing instability. Furthermore, it has been shown thatthe mathematical assumptions of the BCU method do not holdgenerically and that the theoretical guarantees for the BCUmethod are, at best, questionable [6], [11].On the other hand the Lyapunov function approach to tran-
sient stability analysis has been traditionally considered verydifficult due to the lack of a systematic methodology for con-structing a Lyapunov function (see [12]–[14] for details and asystematic survey of Lyapunov functions in power system sta-bility). The method of Zubov is an exception and, in principle,can find a Lyapunov function and determine the exact boundaryof the Region Of Attraction (ROA). This method requires thesolution of a Partial Differential Equation (PDE) which doesnot possess in general a closed form solution. For power systemmodels, the existence of transfer conductances has proven againto be a serious difficulty. This is the case, for example, when
1549-8328/$31.00 © 2013 IEEE

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
2 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: REGULAR PAPERS
using the multivariable Popov stability criterion. This methodcan also construct a genuine Lyapunov function, but requiresthe satisfaction of sector conditions that break down in the pres-ence of transfer conductances (see, for example, [15]–[17] andreferences therein).More recent results in the literature, using a passivity-based
control methodology (see [18] and references therein), showthe existence of Lyapunov functions for small, but unspecified,transfer conductances and require the solution of a formidablesystem of PDEs (additionally, the angle differences in equi-librium are also required to be small). Another recent result[19], which is closemethodologically to our approach, estimatesthe ROA for non-polynomial systems using truncated Taylorexpansions and semidefinite programming optimizations—seealso [20] for a comprehensive description of Sum Of Squares(SOS) programming techniques for the estimation and controlof the domain of attraction of equilibrium points. Alternatively,the method in [21] shows that a local energy-like Lyapunovfunction exists, in general, for stable systems with transfer con-ductances. Since these results are local in character, they canonly determine the stability of the equilibrium point and cannotbe used to determine the ROA. Moreover, they cannot be usedin transient stability assessments or in estimating the criticalclearing time. The method in [22] proposes a procedure to con-struct Lyapunov functions for power systems with transfer con-ductances using dissipative systems theory for large scale inter-connected systems. This approach is the only one that we foundin the literature where the condition of small transfer conduc-tances is not necessary. Nevertheless, it still contains some re-strictive sector conditions on the nonlinearities which translateinto conditions on the angle differences in equilibrium. It alsocontains many parameters that have to be finely tuned in orderfor the method to converge. The method in [23] uses an ex-tension of LaSalle’s Invariance Principle to find extended Lya-punov functions for power systems with transfer conductances.The derivative of the extended Lyapunov function is not re-quired to be always negative semidefinite and can take positivevalues in some bounded regions. This is a very interesting andpromising approach. Moreover, the authors propose a genericLyapunov function for multimachine systems. The conditions inthe Extended Invariance Principle require that the transfer con-ductances be small in order for the domain in which the deriva-tive is positive to be included in the bounded domain definedby the Lyapunov function. Usually, these domain inclusions arevery difficult to compute numerically and the assumption thatthe transfer conductances are small is necessary in order to guar-antee these conditions.Themain contribution of this paper is twofold. First, we intro-
duce an algorithm that constructs Lyapunov functions for clas-sical power system models. Second, we embed this algorithminto an optimization loop which seeks to maximize the esti-mate of the region of attraction of the stable operating point.Our approach exploits recent system analysis methods that haveopened the path toward the algorithmic analysis of nonlinearsystems using Lyapunovmethods [24]–[30]. We introduce threecritical steps that are necessary in this formulation. For dynam-ical systems described by polynomial vector fields, the first stepis to relax the non-negativity conditions in Lyapunov’s theoremto appropriate Sum Of Squares (SOS) conditions which can betested efficiently using semidefinite programming (SDP) [24].
The SOS technique cannot be applied directly to power gridsystems since they are not defined by polynomial vector fields.Hence, the second step is to generalize the SOS formulation tonon-polynomial systems using a procedure which recasts theoriginal non-polynomial system into a set of polynomial dif-ferential algebraic equations [27]. Finally, since the recastedsystem evolves over algebraic equality constraints, we employ afundamental theorem from real algebraic geometry [31] in orderto provide a convex relaxation of the equality and inequalityconditions required by Lyapunov’s theorem in this case [25].The proposed algorithm is used to find Lyapunov functions andestimates of the Region Of Attraction (ROA) for two powersystem models. We formulate an optimization algorithm thatsearches over the space of polynomial Lyapunov functions inorder to improve these estimates. For the power system modelwithout transfer conductances we compare the performance ofthe proposed algorithm to the energy function method.We applythe same analysis to the power system with transfer conduc-tances for which an exact energy function does not exist but forwhich a Lyapunov function has been proposed in the literature.A critical discussion of the method is also presented. Extensionsand a discussion of the steps required to generalize this analysisto large scale systems are also described.The SOS programming concepts introduced in this paper are
not new but, to the best of our knowledge, they have never beenapplied to the transient stability analysis of power systems.
II. CLASSICAL POWER SYSTEM MODEL FOR TRANSIENTSTABILITY ANALYSIS
Wewill consider a power system consisting of synchronousgenerators. Each generator is represented by a constant voltagebehind a transient reactance, constant mechanical power, andits dynamics are modeled by the swing equation. The generatorvoltages are denoted by , whereare the generator phase angles with respect to the synchronouslyrotating frame. The magnitudes are held constantduring the transient in classical stability studies. Furthermore,the loads are represented as constant, passive impedances. Thus,the post fault mathematical model for this system is describedby the following set of nonlinear differential equations [4]
(1a)
(1b)
where is the generator inertia constant, , whereis the generator damping coefficient, is mechanical
power input, and is the electrical power output
(2)
where and are the line admittances and conductances.We assume that the dynamical system has a post-fault Stable
Equilibrium Point (SEP) given by where is thesolution of the following set of nonlinear equations:
(3)

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
ANGHEL et al.: ALGORITHMIC CONSTRUCTION OF LYAPUNOV FUNCTIONS 3
where . Since the solution is invariant toa uniform translation of the angles ( , where is aconstant), we work with the relative angles with respect to a ref-erence node, for example, node . Thus, the angle subspace hasdimension and the one-dimensional equilibrium manifoldcollapses to a point in an phase space. Moreover,in the presence of uniform damping ,including zero damping, we can further reduce the phase spaceby working with relative speeds. When this is the case the phasespace dimension is . The changes that we need tomake to the equations of motion (1) in order to describe the dy-namics of the relative angles and speeds are obvious [4] and arenot explicitly presented here. Finally, we make the followingchange of variables in (1) in order to transfer thestable equilibrium point to the origin in phase space.
A. Model A: Power System Without Transfer Conductances
The first model has no transfer conductances and it is a powersystem model which is discussed extensively in [5]. This ex-ample represents a three-machine system with machine number3 as the reference machine
where , , , and . Since there areno cosine terms in these equations, they model a lossless systemfor which in (2). The pointis a SEP for this system. Using a change of variables,
, we shift the equilibrium point at the origin. The dynamicequations in shifted coordinates are
This model has an energy function [5] whose expression inshifted coordinates is given by
We will use both the closest UEP and the BCU method to es-timate the ROA and to compare these results with the estimateobtained using SOS techniques.
B. Model B: Power System With Transfer Conductances
The second model has transfer conductances and representsa two-machine versus infinite bus system which has been dis-cussed in [23]
where , , , and . This modelhas a stable equilibrium point at .The dynamic equations in shifted coordinates are
In [23] an analytical Lyapunov function, , is proposedbased on the extension of LaSalle’s invariance principle—theexpression for is too long to reproduce here. The esti-mated ROA provided in [23] will be compared to the estimateobtained in this paper using SOS techniques.
III. PROBLEM FORMULATION
We assume that our dynamical system is described by an au-tonomous set of nonlinear (1) which we write concisely as
(4)
where is the state vector and the vector fieldsatisfies the smoothness conditions for the exis-
tence and uniqueness of solutions. For the classical gener-ator model in the presence of uniform dampingand otherwise. We assume without loss of gener-ality that the origin is a SEP for this system, i.e., and
.We are now in a position to formulate the transient stability
analysis problem. Assume that at the end of a disturbancecontrolled by fault-on dynamics, different from (4), the system

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
4 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: REGULAR PAPERS
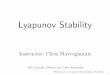
Fig. 1. Model A: The boundary of the region of attraction for the SEPlocated at the origin . This boundary contains 12 hyperbolic UEPs .The gray areas denote various estimates of the ROA based on energy functionmethods (see text for details).
reaches the state when the disturbance is finally cleared andits dynamics controlled by (4). The transient stability questionis whether the trajectory for (4) with initial conditions
will converge to the stable equilibrium point ofinterest, i.e., , as time goes to infinity. Mathematically,we can answer this question by deciding if belongs to theROA of , defined as
where is the system trajectory starting from at time. The boundary of the stability region is called the
stability boundary of and is denoted by .In order to estimate the ROA of the SEP a mathematical
characterization of its stability boundary is necessary.Under some generic mathematical conditions, it can be shownthat for a fairly large class of nonlinear autonomous dynamicalsystems the stability boundary consists of the union of the stablemanifolds of all unstable equilibrium points (and/or closed or-bits) on the stability boundary [5], [32], [33].For example, for model A, Fig. 1 shows the intersection
of the stability boundary with the angle subspace. There are 12 hyperbolic equilibrium points
lying on the stability boundary of —the hyperbolicityof equilibrium points of the classical power system model isgeneric [5]. Four more UEPs are also shown . The closestUEP defines a set which containsmultiple connected components (dark gray areas). The con-nected component containing the SEP estimates its stabilityregion according to the closest UEP method. If the fault-ontrajectory intersects the stability boundary bycrossing the stable manifold of , then this point is thecontrolling UEP relative to the fault-on trajectory. The setdefined by (light gray areas) defines alocal approximation to the stability boundary for all fault-ontrajectories which intersect the stable manifold of .While these mathematical results enable the exact compu-
tation of the stability region, the algorithmic implementation
is numerically very expensive and often inaccurate. In partic-ular this approach requires the identification of all equilibriumpoints, which is extremely difficult for large-scale nonlinear dy-namical systems. Moreover, the algorithm also needs to iden-tify those equilibrium points whose unstable manifolds con-tain trajectories approaching the SEP and numerically expen-sive time-domain simulations are required to accomplish thistask. For these reasons a number of methods have been pro-posed to approximate the ROA of stable equilibrium points. Theso called direct methods use Lyapunov and energy functions toinfer information about the system stability from the state of thesystem at the beginning of its post-fault phase.
IV. LYAPUNOV FUNCTION THEORY
The use of Lyapunov functions for direct transient stabilityanalysis relies on a stability theorem formulated by Lyapunov.This theorem defines the following sufficient conditions for thestability of the equilibrium point for the system (4) [34].Theorem 1 Lyapunov: If there exists an open set
containing the equilibrium point and a continuously dif-ferentiable function such that and
(5a)
(5b)
then is a stable equilibrium point. Moreover, ifis positive definite in then is an asymp-
totically stable equilibrium of (4). In addition, any regionsuch that describes a posi-
tively invariant region contained in the ROA of the equilibriumpoint.The continuously differentiable function is called a Lya-
punov function—the energy function is generally not a Lya-punov function, except in very specific cases. For a given Lya-punov function, the largest region offers the best estimateof the region of attraction of the equilibrium point. Since thetheorem leaves complete freedom in selecting both a Lyapunovfunction and a domain , an optimization algorithm thatsearches over and in order to maximize the estimate ofthe ROA will be formulated in Section VII.The difficulties encountered in the application of Lyapunov
theorem stem from the positivity conditions required in the the-orem, which are notoriously difficult to test. Even in cases whenboth the vector field and the Lyapunov function candidateare polynomial, the Lyapunov conditions are essentially polyno-mial non-negativity conditions which are known to be -hardto test [35]. Fortunately, as has been pointed out in [24], if werelax the polynomial non-negativity conditions to appropriatepolynomial sum of squares (SOS) conditions, testing SOS con-ditions can then be done efficiently using semidefinite program-ming (SDP), as we discuss in Appendix I. To illustrate this pointlet us assume that in Theorem 1. Then, the condi-tions of Theorem 1 become sufficient global stability conditions.They can be reformulated as SOS conditions as follows.Proposition 1: Suppose that for the system (4) there exists a
polynomial of degree such that and
(6a)
(6b)

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
ANGHEL et al.: ALGORITHMIC CONSTRUCTION OF LYAPUNOV FUNCTIONS 5
where is the set of all SOS polynomials in variables and, with , was introduced to guar-
antee the positive definiteness of . Then, is a globallystable equilibrium point. If we replace the second condition with
is SOS, where , for , thenis globally asymptotically stable.The software SOSTOOLS [36], [28], in conjunction with a
semidefinite programming solver such as SeDuMi [37], canbe used to efficiently solve the LMIs that appear in the SOSconditions [6]. For examples and extensions see [25], [28],[29], [36]. All the SOS programs formulated in this paperwere solved using the freely-available MATLAB toolboxesSOSTOOLS, Version 2.0 [36], and SeDuMi, Version 1.1 [37].
V. RECASTING THE POWER SYSTEM DYNAMICS
SOS programming methods cannot be directly applied tostudy the stability of power system models because theirdynamics contain trigonometric nonlinearities and are notpolynomial. For this reason a systematic methodology to recasttheir dynamics into a polynomial form is necessary [25], [27].It has been shown in [38] that any system with non-polynomialnonlinearities can be converted to a polynomial system with alarger state dimension. The recasting introduces a number ofequality constraints restricting the states to a manifold havingthe original state dimension. For the classical power systemmodel introduced in Section II recasting is trivially achievedby a non-linear change of variables
(7a)
(7b)
(7c)
for . Here we assume a model with uniformdamping so that and represent therelative angles and speeds of the generators. Recasting producesa dynamical system with a larger state dimension, ,where for a model with uniform damping. Whenthe damping is not uniform , , andthe recasted variables include in addition to (7).Recasting also introduces equality constraints,
(8)
where , which restrict the dynamics of the newsystem to a nonlinear manifold of dimension in .Note that we have chosen the recasted variables in such a way
that the stable equilibrium point of the original system, ,is mapped to in the recasted system space.
A. Recasting the Dynamics of Model A
Let us consider first the differential equations describing thedynamics of model A. We define the new state variables
, , , and ,, . The dynamics for these new state
variables can be derived from the model equations by using thechain rule of differentiation and by replacing everywhere in thederived equations with , and
with . Thus, we obtain the fol-lowing dynamical system
The dynamics are constrained by the following equations,
which restrict the evolution of the new system in its 6-dimen-sional state space to a 4-dimensional manifold.
B. Recasting the Dynamics of Model B
The reacasted dynamics of model B is given by
while its constraints are defined by the following equalities:
For both models recasting produces a system whose dy-namics are described by polynomial Differential AlgebraicEquations (DAE).
VI. ANALYSIS OF RECASTED MODELS
We have just shown that for a classical power system con-sisting of generators recasting is trivially achieved by a non-linear change of variables (7), which we write as
(9)
with . Recasting produces a dynamical systemwhose dynamics are modeled by polynomial DAE
(10a)
(10b)

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
6 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: REGULAR PAPERS
where , and , andare vectors of polynomial functions.In the new state space we assume a semi-algebraic domain
defined by the following inequality and equality constraints,
(11)
with a positive definite polynomial and to ensurethat is connected and contains the origin. For the recastedsystem (10) the following extension of Theorem 1 provides suf-ficient conditions that guarantee the existence of a Lyapunovfunction for the original non-polynomial system [27].Theorem 2: If there exists an open set containing
the equilibrium point and a continuously differentiablefunction such that , and
(12)
(13)
then is an asymptotically stable equilibrium of (10).Moreover, any region such that
describes a positively invariant region contained in theROA of the equilibrium point.This theorem expresses the fact that only needs to be
positive on the domain defined by (11). Finally,is a Lyapunov function for the original non-polyno-
mial system.
A. Local Stability Analysis
The conditions of Theorem 2 for asymptotic stability can beformulated as set inclusion conditions
(14a)
(14b)
If we can find a constant and a to satisfy theseconditions then system (10) is asymptotically stable about thefixed point . We assume that the positive polynomialdefining the level sets of the domain is fixed.We further replace the non-polynomial constraint with
and , where , and formulate theconditions (14) as the following set emptiness conditions:
(15a)
(15b)
According to the Positivstellensatz (P-satz) theorem dis-cussed in Appendix II, these conditions hold if and only
if we can find and ,
, , , andsuch that
(16)
(17)
Using the definitions of the cone , monoid , and ideal ,we can rewrite these set emptiness constraints as a search for
, , , and suchthat
(18a)
(18b)
Note that are -dimensional vectors of polynomialsin .To limit the degree of the polynomials, and implicitly the
size of the SOS program, we select . To fur-ther reduce the size of the SOS program we replacewith and with , since theproduct of two SOS polynomials is SOS. Similarly, we replaceand with and . We can now factor out the
terms to get the following convex relaxation of Theorem 2.Proposition 2: If there exists a constant and polyno-
mial functions , and such thatand
(19a)
(19b)
then is an asymptotically stable equilibrium point of (10)and is a Lyapunov function for the originalnon-polynomial system.Note that by choosing and
we recover Proposition 4 in [25]. This choice also removes thebilinear constraints in and .1) Lyapunov Function for Model A: We define
and search for and for a Lya-punov function of maximum degree and withoutany constant term (degree zero monomial) since we have to en-force the constraint . We choose ,
, where and , . Weselect and and the maximum degrees
of the SOS multipliers and of the polyno-mials. These are two component vectors since the constraintsare two component vectors of polynomials. We impose the fol-lowing degree relationships in order to make (19) possible:

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
ANGHEL et al.: ALGORITHMIC CONSTRUCTION OF LYAPUNOV FUNCTIONS 7
We now search for a feasible solution of the followingproblem with SOS constraints
(20a)
(20b)
where we choose , , , ,, . We find that for the SOS problem is
feasible and it has the following solution in the original phasespace coordinates:
According to Theorem 2 the operating point at the origin isasymptotically stable.2) Lyapunov Function for Model B: For this model we chose
. We have made thesame choices for the degree of the Lyapunov function andfor the degrees of the various polynomials involved in the SOSproblem (20). We found that for the SOS problem isfeasible and it has the following solution in the original phasespace coordinates:
As for model A, this shows that the operating point at the originis asymptotically stable.
B. Estimating the Region of Attraction
These Lyapunov functions enable us to estimate the ROA ofthe stable operating point for these two models. Indeed, assumethat for a given scalar the level set
, is included in the domain , i.e., . Thendescribes a positively invariant region contained in the ROA
of the equilibrium point. For a given domain and Lyapunovfunction , the best estimate of the ROA of the SEP at theorigin is given by the largest such that . To find wehave to solve the following optimization problem
where , , , and are fixed. This can be formulated asan SOS programming problem by constructing the followingempty set constraint version
According to the the P-satz theorem this condition holds ifand only if we can find , ,
, and such that
(21)
By picking in the definition of the monoid theset emptiness condition is cast into a search for ,
, and such that
Thus, the best estimation of the ROA can be defined as the fol-lowing SOS programming problem
(22a)
(22b)
(22c)
which is solved using a bisection search on .1) ROA Estimation for Model A: In Fig. 2 the dark gray area
represents the largest invariant setwhich was obtained for . This repre-
sents a poor estimate of the exact ROA (the thin line connectingthe UEPs on the boundary of the stable fixed point). Com-pare this estimate to the constant energy surface passing throughthe closest UEP and, locally, to the energy surface passingthrough the UEP (thick black lines). The light gray area de-fines the domain ,projected in the angle space, for . An algorithm to max-imize the size of the invariant subset is needed in order to im-prove the estimated ROA.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
8 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: REGULAR PAPERS
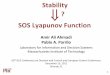
Fig. 2. Model A: The region of attraction for the SEP located at the origin,projected in the angle space , is shown in thin black line con-necting the UEPs on its boundary. The light gray area defines the domainfor . The dark gray area inside represents , for , and
is an (under)estimate of the ROA.
Fig. 3. Model B: The region of attraction for the SEP located at the origin, pro-jected in the angle space , is the outermost thin black line. Thelight gray area defines the domain . The dark gray area inside represents, for ; which is an (under)estimate of the ROA. The thick black
line defines the estimated ROA provided in [23].
2) ROA Estimation for Model B: In Fig. 3 the dark gray arearepresents the largest invariant set obtained for .It represents a poor estimate of the exact ROA (the outermostthin black line). This estimate should be compared to the levelset , for , whereis the Lyapunov function computed for this model in [23] (theintermediate thick black line). The light gray area defines thedomain , projected in the angle space, for . For modelB it is also necessary to devise an algorithm to improve theestimated ROA.
VII. OPTIMIZING THE REGION OF ATTRACTION
An obvious choice to improve the estimate of the fixed point’sROA is to expand the domain by maximizing . A bisectionsearch over can be used to search for the maximum value
for which a feasible solution for the problem (14) can befound. Then, by solving (22) and finding the largest level set ofincluded in , an improved estimate of the fixed point’s ROA
can be found. This is the essence of the expanding algorithmfirst proposed in [39]. Its extension to the analysis of non-poly-nomial systems can be easily obtained by replacing the relevantsteps in the algorithm with their non-polynomial extensions de-scribed in Sections VI-A andVI-B. However, expanding doesnot guarantee the expansion of , the largest invariant set con-tained in . For this reason, as Figs. 2 and 3 already suggest,the algorithm often finds a large that contains a much smallerinvariant set . We do not provide more details here becausethis algorithm does not perform as well as the expanding inte-rior algorithm which we describe next.
A. Expanding Interior Algorithm
The idea of the algorithm is to expand a domain that is con-tained in a level set of the Lyapunov function . This improvesthe estimate of the ROA since the domain expansion alwaysguarantees the expansion of the invariant region defined by thelevel set of . This algorithm was also introduced in [39]. Wemodify this algorithm in two ways. First, we extend the algo-rithm to analyze non-polynomial systems. Then, we introducean iteration loop designed to improve the estimate of the ROA.The basic idea of the algorithm is to select a positive definite
polynomial and to define a variable sized domain
(23)
subject to the constraint that all points in converge to theorigin under the flow defined by the system’s dynamics. In orderto satisfy this constraint we define a second domain
(24)
for a yet unspecified candidate Lyapunov function and im-pose the constraint that is contained in . Then by maxi-mizing over the set of Lyapunov functions , while keepingthe constraint , we guarantee the expansion of the do-main which provides an estimate of the fixed point’s ROA.Theorem 2 imposes additional constraints which can be for-
mulated as set inclusion conditions. The first constraint,
(25)
requires the derivative of the Lyapunov function and constantto be negative over the manifold defined by inside thedomain . The second constraint requires the Lyapunov func-tion to be positive on the manifold defined by insidethe domain . Since and thus are unknown, the onlyeffective way to ensure this constraint is to require that is pos-itive everywhere on the manifold defined by
(26)

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
ANGHEL et al.: ALGORITHMIC CONSTRUCTION OF LYAPUNOV FUNCTIONS 9
Thus, the problem of finding the best estimate of the ROA canbe written as an optimization problem with set emptiness con-straints
If we replace the two non-polynomial constraints withand for , positive definite, the
formulation becomes
By selecting we recover the formulation in [39], extendedto handle equality constraints introduced by the recasting pro-cedure.By applying the P-satz theorem, this optimization problem
can be now formulated as the SOS programming problem
Again, in order to limit the size of the SOS problem, we makea number of simplifications. First, we select. Then, we simplify the first constraint by selectingand factoring out from and the polynomials . Since thesecond constraint contains quadratic terms in the coefficents of, we select , replace with , and
factor out from all the terms. Finally, we selectin the third constraint in order to eliminate the quadratic terms
in and factor out . Thus, we reduce the SOS problem to thefollowing formulation:
The algorithm performs an iterative search to expand the do-main starting from some initial Lyapunov function . At eachiteration step, due to the presence of bilinear terms in the deci-sion variables, the algorithm alternates between two SOS opti-mization problems. When no improvement in is possible, thealgorithm stops and offers the best estimate of the ROA. Thequality of the estimate critically depends on the choice of thepolynomial . By improving this choice we can find betterestimates and the following observation suggests how this canbe done. Notice that the Lyapunov function changes as the it-eration progresses and that by expanding the domain the al-gorithm forces the level sets of the Lyapunov function to betterapproximate the shape of the ROA. This observation suggeststhat the algorithm can be improved by introducing another it-eration loop over : when the algorithm defined above con-verges and no improvements in can be found, we use the Lya-punov function to define the new . Since we requiredto be positive definite everywhere, this substitution is alwayspossible. This substitution guarantees that the next optimiza-tion loop starts from the point where . Due tothe constraint weobserved that the algorithm stops when it reaches a fixed pointwhere , and . Finally, we noticed that wecannot always guarantee that a domain can be found whilekeeping the constant fixed. For this reason we have includeda search over at each iteration step. The detailed descriptionof the algorithm is as follows—see [39] for a comparison to itsoriginal formulation.
B. SOS Formulation
The algorithm contains two iteration loops to expand the re-gion and, implicitly, the domain that provides an estimateof the ROA of the SEP . The outer iteration loop is overthe polynomial defining . The itera-tion index for this loop is . The inner iteration loop is over theparameter and defines its iteration index. The outer iterationstarts from a candidate polynomial for .The inner iteration starts from a candidate Lyapunov function
which can be found by solving the SOS program de-scribed in Theorem 2. For the two power system models weselect a quadratic polynomial and the Lyapunov functions
found in Section VI-A.Select the maximum degrees of the Lyapunov function, the
SOS multipliers, the polynomials , and the polynomials as, , , , , , and respectively. Fix
for and some small . Finally,select .

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
10 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: REGULAR PAPERS
(1a) Set , . We expect the SOSproblem to be infeasible until reaches the level at which
The problemremains feasible until we reach a value at which isno longer negative inside level set. Therefore,for given , we will find that the SOSproblem is feasible for . Therefore, we searchon in order to solve the following SOS optimization problem
where the decision variables are: , ,
and and . Set
, , , and . Set .(1b) Set and and perform a line search
on in order to find the largest domain includedin . To solve this problem we formulate thefollowing SOS optimization problem
where the decision variables are: , ,
and and . Set
, , , and . Set .(2a) Set fixed and , and . We
want to find a and a on the manifold so thatis included in . Thus, we solve
and set .(2b) Fix and set , and . We search
over and so that we can maximize
Set and . If is smaller than agiven tolerance go to step (3). Otherwise, increment and go tostep (1a).
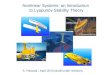
Fig. 4. The region of attraction for the SEP located at the origin , projectedin the angle space , is shown in thin black line connectingthe UEPs on its boundary. The thick black lines show the constant energysurface passing through the closest UEP and the one passing through theUEP . The dark gray area shows the best estimate of the ROA according tothe expanding interior algorithm.
(3) If set and go to step (1a). Ifand the largest (in absolute value) coefficient of the polynomial
is smaller than a given tolerance, the outeriteration loop ends. Otherwise, advance , set andgo to step (1a).(4) When the outer iteration loop stops the set
contains the domain
and is the largest estimate of the fixedpoint’s ROA. In practice, we noticed that when the outeriteration loop stops the algorithm reaches a fixed point wherethe domain becomes essentially indistinguishable fromthe domain .
C. Analysis of Model A
For this model the optimization algorithm described in theprevious section returns the following Lyapunov function
The Lyapunov function has been rescaled so that the best esti-mate of the ROA is provided by the level setwith . This estimate is shown by the dark gray area
in Fig. 4. We notice that this estimate significantly improvesthe one provided by the closest UEP method. We also noticethat the algorithm provides a good global estimate of the ROA

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
ANGHEL et al.: ALGORITHMIC CONSTRUCTION OF LYAPUNOV FUNCTIONS 11
Fig. 5. The region of attraction for the SEP located at the origin, projectedin the angle space , is the outermost thin black line. Theexpanding interior algorithm produces an estimate of the ROA shown in lightgray. The dark gray area represents the estimated ROA provided in [23].
which compares well with the local estimates returned by thecontrolling UEP method. For example, compare locally the ap-proximation returned by our algorithm with the one providedby the controlling UEP : our estimate is better except veryclose to . This property holds for many other possible con-trolling UEPs on the boundary of the ROA. Finally, our algo-rithm avoids the computationally difficult task of estimating thecontrolling UEP.
D. Analysis of Model B
For this model the expanding interior algorithm returns thefollowing Lyapunov function (projected back in the originalphase space coordinates)
This Lyapunov function has also been rescaled so that thebest estimate of the ROA is provided by the level set
with . Our estimate shouldbe compared to the dark gray area which is the estimatedROA provided by for ,where is the Lyapunov function computed in [23] forthis model. Except for a very small region of the phase space(for this particular projection) our estimateis better. In fact, the analysis of multiple two-dimensionalprojections in phase space shows that our estimate outperformsthe estimate provided by . Perhaps this comparison is
not fair since the elegant method proposed in [23] containsmultiple parameters that can be optimized in order to improvethe estimated ROA. More importantly, the domain inclusionsand the boundedness of the set which are required by theExtended Invariance Principle in [23] are very difficult to checknumerically. For this reason the assumption that the transferconductances are small is necessary in order to guaranteesome of these constraints. Many of these difficulties could beovercome by applying the algebraic methods proposed in thispaper and a synthesis of these two approaches might provideimproved ROA estimates.
VIII. DISCUSSION AND FUTURE WORK
We have introduced an algorithm for the construction of Lya-punov functions for classical power system models. The algo-rithm we propose provides mathematical guarantees and avoidsthe major computational difficulties engendered by the compu-tation of the controlling UEP in the energy function method.Moreover, we have also shown that systems with transfer con-ductances can be analyzed as well, without any conceptual dif-ficulties. This is a significant result because analytical energyfunctions do not exist for these systems and the proposed SOSanalysis provides a constructive approach for computing analyt-ical Lyapunov functions for these systems. The approaches pro-posed in [18], [19], [23] for constructing Lyapunov functionsfor power systems with transfer conductances have to assumethat the transfer conductances are small. Our approach is free ofthese parametric constraints. Moreover, these approaches im-pose structural constraints on the class of Lyapunov functions.The approach we propose is structure-free and for this reasonthe function space in which we search for Lyapunov functionsincludes all these structured Lyapunov subspaces. If well de-signed, our proposed algorithm should outperform these alter-native approaches. The generalization of this approach to net-work preserving models, which also include more realistic loadand generator models [40]–[44], can in principle be achieved.Moreover, further improvements in estimating the ROA mightbe achieved by increasing the dimension of the Lyapunov func-tion.Another possible generalization is the inclusion of para-
metric uncertainties. For power systems these uncertainties canreflect changes in line impedances or uncertainties in some ofthe system parameters (for example the inertia and dampingcoefficient of generators). When this is the case, the locationof the equilibrium usually changes when the parameters arevaried. In the presence of parametric uncertainties the use ofequality and inequality constraints is natural: the region ofthe parameter space that is of interest can be described byinequality constraints, and if the equilibrium moves as theparameters change, one can impose an equality constraint onthe corresponding variables. As we have already shown in thispaper, the stability of systems with constraints can be elegantlyhandled using SOS techniques as demonstrated in [29].This fact can be used to handle the following difficulty.1 The
Lyapunov function derived in this paper is valid for a particularoperating point and any change in parameters or operating pointwill require the solution of another optimization problem to ob-tain a new Lyapunov function for the new configuration. Ap-
1We thank one of our reviewers for pointing out this difficulty to us.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
12 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: REGULAR PAPERS
parently, new Lyapunov functions have to be computed, solvinga high-dimensional optimization problem, every time a changein the system occurs. Nevertheless, by expressing the depen-dence of the equilibrium point on the uncertain parameters usingequality constraints, parameterized Lyapunov function can beconstructed as has been discussed in [29]. Conceptually this ap-proach can produce Lyapunov functions which depend explic-itly on some of the system parameters.Nevertheless, there are serious difficulties before these alge-
braic methods, and the generalizations discussed above, can beapplied to large power systems. The difficulties are not concep-tual but numerical because one of the major limitations of theSOS framework is the complexity of the system description thatcan currently be analyzed. Indeed, the size of the SDP that needsto be solved in order to compute the SOS decomposition growswith the number of variables and the degree of the polynomial.This is a serious limitation, which renders the proposed algo-rithm impractical in its current formulation, as many systems ofinterest are of significantly higher dimension.However, some of these numerical problems can be partially
overcome by using decomposition techniques. In this regard, theapproach in [22] is very significant for a couple of reasons. First,it provides the only alternative that we found in the literature forcomputing Lyapunov functions for systems with transfer con-ductances that do not suffer from the difficulties mentioned be-fore. Second, it contains conditions on the interconnection ofa large scale system such that a weighted sum of the subsys-tems energy functions give a Lyapunov function for the overallsystem. Similar conditions can be employed by our method inorder to analyze larger power systems.Alternatively, decomposition techniques that have been pro-
posed for the analysis of large-scale systems—see for example[45] and the references therein—can be used in order to addressthis problem. The underlying assumption is that stability cer-tificates can be constructed for the individual subsystems andpatched together to form a composite Lyapunov function [30].Finally, one can employ clustering and aggregation techniques[46] to generate a low-dimensional system of equivalent gener-ators and apply the proposed analysis techniques to this reducedmodel.
APPENDIX ITHE SUM OF SQUARES DECOMPOSITION
In this appendixwe give a brief introduction to sum of squares(SOS) polynomials and describe how the existence of a SOSdecomposition can be verified using semidefinite programming[47]. The notation used is as follows. Let denote the set of realnumbers and denote the set of nonnegative integers. The setof matrices is represented by . A matrixis positive definite if for all , andpositive semidefinite if for all , ; wedenote these by and respectively. A monomial
in independent real variables is a function of theform , where , and the degree of themonomial is . Given anda polynomial is defined as . The degree
of is defined by . We will denote theset of polynomials in variables with real coefficients asand the subset of polynomials in variables that have maximumdegree as .
Definition 1: For , a multivariate polynomialis a sum of squares (SOS) if there exist some
polynomial functions , such that
(27)
Note that being a SOS implies that for all. However, the converse is not always true except in special
cases [48]. The set of all SOS polynomials in variables willbe denoted as and we define .An equivalent characterization of SOS polynomials is given
in the following proposition [24].Proposition 3: A polynomial of degree is a
SOS if and only if there exists a positive semidefinite matrixand a vector of monomials in variables of degree lessthan or equal to such that .In general, since the monomials in are not alge-
braically independent, the matrix in the quadratic repre-sentation of the polynomial is not unique and the set ofmatrices that make the quadratic equality in Proposition 3 holdare an affine subspace of the symmetric matrices [49].
(28)where is any symmetric matrix such that
and is the set of symmetricmatrices such that . Since beingSOS is equivalent to , the problem of finding a whichproves that is an SOS is equivalent to checking if thereexist such that . This Linear MatrixInequality (LMI) is a convex feasibility problem, as was firstnoticed in [24], and can be solved efficiently using semidefiniteprogramming techniques which have worst-case polynomialtime complexity. Note that, as the degree of or its numberof variables is increased, the computational complexity fortesting whether is a SOS increases. Nonetheless, thecomplexity overload is still a polynomial function of theseparameters.An important extension, widely used in this paper, was intro-
duced in [50] and refers to the case when is a linear combi-nation of polynomials with unknown coefficients, and we wantto search for feasible values of those coefficients such thatis nonnegative.Theorem 3: Given a finite set of polynomials ,
the existence of such that
(29)
is a LMI feasibility problem.When supplemented by the following optimization objective
(30)
where the the are scalar, real decision variables and the aresome given real numbers, (29) and (30) define a SOS program.This SOS program can be converted to a convex semidefinite

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
ANGHEL et al.: ALGORITHMIC CONSTRUCTION OF LYAPUNOV FUNCTIONS 13
program (SDP) which can be solved numerically with great effi-ciency. The software SOSTOOLS [36], [28] automatically per-forms this conversion for general SOS programs. It also calls aSDP solver, such as SeDuMi [37], and converts the SDP solu-tion back to the solution of the original SOS program. We haveused SOSTOOLS, Version 2.0, in conjunction with SeDuMi,Version 1.1, to solve all SOS programs formulated in this paper.
APPENDIX IIBASIC ALGEBRAIC GEOMETRY
In this section we introduce the basic algebraic definitionsthat are necessary in order to present one of the most importanttheorems in real algebraic geometry.Definition 2: Given , the Multiplicative
Monoid generated by ’s is
(31)
which is the set of all finite products of ’s including the emptyproduct, defined to be 1.Definition 3: Given , the Cone generated
by ’s is
(32)
Definition 4: Given , the Ideal generatedby ’s is
(33)
With these definitions we can now state the following funda-mental theorem.Theorem 4 (Positivstellensatz): Given polynomials
, , and in , thefollowing are equivalent.1) The set
(34)
is empty.2) There exist polynomials ,
, and such that
(35)
The LMI based tests for SOS polynomials can be used toprove that the set emptiness condition from the Positivstellen-satz ( -satz) holds, by finding specific , and such that
. These , and are known as P-satz cer-tificates since they certify that the equality holds.It is important to notice that the -satz offers no guidance
on how to select the degrees of the polynomials involved in thedefinition of the monoid , cone , and ideal . By putting anupper bound on these degrees and checking whether (35) holds,one can create a series of tests for the emptiness of (34). Each ofthese tests requires the construction of some sum of squares andpolynomial multipliers, resulting in a sum of squares programthat can be solved using SOSTOOLS.
ACKNOWLEDGMENT
The authors would like to thank the anonymous reviewers fortheir valuable comments and suggestions.
REFERENCES
[1] M. Ribens-Pavella, D. Ernst, and D. Ruiz-Vega, Transient Stabilityof Power Systems: A Unified Approach to Assessment and Control.Boston, MA, USA: Kluwer, 2000.
[2] M. A. Pai, Energy Function Analysis for Power System Stability.Boston, MA, USA: Kluwer, 1989.
[3] A. A. Fouad and V. Vital, Power System Transient Stability AnalysisUsing the Transient Energy Function Method. Englewood Cliffs, NJ,USA: Prentice-Hall, 1992.
[4] M. Ribens-Pavella and P. G. Murthy, Transient Stability of Power Sys-tems: Theory and Practice. New York, NY, USA: Wiley, 1994.
[5] H. D. Chiang, Direct Methods for Stability Analysis of Electric PowerSystems. New York, NY, USA: Wiley, 2011.
[6] C. C. Chu and H. D. Chiang, “Boundary property of the BCU methodfor power system transient stability assessment,” in Proc. ISCAS, May2010, pp. 3453–3456.
[7] H. D. Chiang, C. C. Chu, and G. Cauley, “Direct stability analysis ofelectric power systems using energy functions: Theory, applications,and perspective,” Proc. IEEE, vol. 83, no. 11, pp. 1497–1529, Nov.1995.
[8] H. D. Chiang and C. C. Chu, “Theoretical foundation of the BCUmethod for direct stability analysis of network-reduction power systemmodel with small transfer conductances,” IEEE Trans. Circuits Syst. I,Fundam. Theory Appl., vol. 42, pp. 252–265, May 1995.
[9] H. D. Chiang, Systems Control Theory for Power Systems, ser. IMAVolumes in Mathematics and Its Applications. New York, NY, USA:Springer-Verlag, 1995, vol. 64, ch. The BCUmethod for direct stabilityanalysis of electric power systems: Theory and applications.
[10] A. Llamas, J. D. la Ree Lopez, L. Mili, A. G. Phadke, and J. S. Thorp,“Clarifications of the BCU method for transient stability analysis,”IEEE Trans. Power Systems, vol. 10, no. 1, pp. 210–219, Feb. 1995.
[11] F. Paganini and B. C. Lesieutre, “Generic properties, one-parameter de-formations, and the bcumethod,” IEEE Trans. Circuits Syst. I, Fundam.Theory Appl., vol. 46, no. 6, pp. 760–763, Jun. 1999.
[12] M. A. Pai, Power System Stability: Analysis by the Direct Method ofLyapunov. New York: North-Holland, 1981.
[13] M. Ribbens-Pavella and F. J. Evans, “Direct methods for studying dy-namics of large-scale electric power systems—A survey,” Automatica,vol. 21, pp. 1–21, Jan. 1985.
[14] R. Genesio, M. Tartaglia, and A. Vicino, “On the estimation of asymp-totic stability regions: State of the art and new proposals,” IEEE Trans.Automatic Contr., vol. 30, no. 8, pp. 747–755, Aug. 1985.
[15] J. L. Willems and J. C. Willems, “The application of Lyapunovmethods to the computation of transient stability regions for multima-chine power systems,” IEEE Trans. Power Apparatus Syst., vol. 89,no. 5, pp. 795–801, May 1970.
[16] N. Kakimoto, Y. Ohsawa, andM.Hayashi, “Transient stability analysisof multimachine power systems with field flux decays via Lyapunov’sdirect method,” IEEE Trans. Power Apparatus and Systems, vol. 99,pp. 1819–1827, Sep. 1980.
[17] D. J. Hill and C. N. Chong, “Lyapunov functions of Lur’e-Postnikovform for structure preserving models of power systems,” Automatica,vol. 25, pp. 453–460, May 1989.
[18] R. Ortega, M. Galaz, A. Astolfi, Y. Sun, and T. Shen, “Transient sta-bilization of multimachine power systems with nontrivial transfer con-ductances,” IEEE Trans. Automatic Contr., vol. 50, pp. 60–75, Jan.2005.
[19] G. Chesi, “Estimating the domain of attraction for non-polynomial sys-tems via LMI optimizations,” Automatica, vol. 45, pp. 1536–1541, Jun.2009.
[20] G. Chesi, Domain of Attraction: Analysis and Control via SOS pro-gramming, ser. Lecture Notes in Control and Information Sciences.London, U.K.: Springer, 2011.
[21] H. G. Kwatny, L. Y. Bahar, and A. K. Pasria, “Energy-like Lyapunovfunctions for power system stability analysis,” IEEE Trans. CircuitsSyst. I, Reg. Papers, vol. 32, no. 11, pp. 1140–1149, Nov. 1985.
[22] H. R. Pota and P. J. Moylan, “A new lyapunov function for intercon-nected power system,” IEEE Trans. Automatic Contr., vol. 37, no. 8,pp. 1192–1196, Aug. 1992.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
14 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: REGULAR PAPERS
[23] N. G. Bretas and L. F. C. Alberto, “Lyapunov function for powersystems with transfer conductances: Extension of the invarianceprinciple,” IEEE Trans. Power Syst., vol. 18, no. 2, pp. 769–777, May2003.
[24] P. A. Parrilo, “Structured Semidefinite Programs and SemialgebraicGeometry Methods in Robustness and Optimization,” Ph.D. disserta-tion, Caltech, Pasadena, CA, USA, 2000.
[25] A. Papachristodoulou and S. Prajna, “On the construction of Lyapunovfunctions using the sum of squares decomposition,” in Proc. IEEEConf. Decision Contr., Dec. 2002, pp. 3482–3487.
[26] Z. J. Wloszek, R. Feeley, W. Tan, K. Sun, and A. Packard,Positive Polynomials in Control. Berlin Heidelberg, Germany:Springer-Verlag, 2005, ch. Control Applications of Sum of SquaresProgramming, pp. 3–22.
[27] A. Papachristodoulou and S. Prajna, Positive Polynomials in Con-trol. Berlin Heidelberg, Germany: Springer-Verlag, 2005, ch.Analysis of nonpolynomial systems using the sum of squares decom-position, pp. 23–43.
[28] S. Prajna, A. Papachristodoulou, P. Seiler, and P. A. Parrilo,Positive Polynomials in Control. Berlin, Heidelberg, Germany:Springer-Verlag, 2005, ch. SOSTOOLS and Its Control Applications,pp. 273–292.
[29] A. Papachristodoulou and S. Prajna, “A tutorial on sum of squares tech-niques for systems analysis,” in Proc. 2005 American Contr. Conf.,Jun. 2005, pp. 2686–2700.
[30] J. Anderson and A. Papachristodoulou, “A decomposition techniquefor nonlinear dynamical system analysis,” IEEE Trans. AutomaticContr., vol. 57, pp. 1516–1521, Jun. 2012.
[31] J. Bochnak, M. Coste, and M.-F. Roy, Real Algebraic Geometry.Berlin, Germany: Springer, 1998.
[32] J. Zaborszky, G. Huang, B. Zheng, and T. C. Leung, “On the phaseportrait of a class of large nonlinear dynamic systems such as powersystems,” IEEE Trans. Automatic Contr., vol. 33, no. 1, pp. 4–15, Jan.1988.
[33] H. D. Chiang, M. W. Hirsch, and F. F. Wu, “Stability regions ofnonlinear autonomous dynamical systems,” IEEE Trans. AutomaticContr., vol. 33, no. 1, pp. 16–27, Jan. 1988.
[34] H. K. Khalil, Nonlinear Systems. Englewood Cliffs, NJ, USA: Pren-tice Hall, 1996.
[35] K. G. Murty and S. N. Kabadi, “Some NP-complete problems inquadratic and nonlinear programming,” Mathematical Programming,vol. 39, no. 2, pp. 117–129, Jun. 1987.
[36] S. Prajna, A. Papachristodoulou, and P. A. Parrilo, SOSTOOLS ASum of Squares Optimization Toolbox, User’s Guide. Pasadena,CA, USA: Caltech, 2002 [Online]. Available: http://www.cds.cal-tech.edu/sostools
[37] J. F. Sturm, “Using SeDuMi 1.02, a MATLAB toolbox for op-timization over symmetric cones,” Optimization Methods andSoftware vol. 11–12, pp. 625–653, Dec. 1999 [Online]. Available:http://fewcal.kub.nl/sturm/software/sedumi.html
[38] M. A. Savageau and E. O. Voit, “Recasting nonlinear differential equa-tions as S-systems: A canonical nonlinear form,”Mathematical Biosci.,vol. 87, no. 1, pp. 83–115, Nov. 1987.
[39] Z. W. Jarvis-Wloszek, “Lyapunov Based Analysis and Controller Syn-thesis for Polynomial Systems Using Sum-Of-Squares Optimization,”Ph.D. dissertation, Univ. California, Berkeley, CA, USA, 2003.
[40] D. J. Hill and A. R. Bergen, “Stability analysis of multimachine powernetworks with linear frequency dependent loads,” IEEE Trans. CircuitsSyst. I, Fundam. Theory Appl., vol. 29, no. 12, pp. 840–848, Dec. 1982.
[41] N. A. Tsolas, A. Arapostathis, and P. P. Varaiya, “A structure pre-serving energy function for power system transient stability analysis,”IEEE Trans. Circuits Syst. I, Fundam. Theory Appl., vol. 32, no. 10,pp. 1041–1049, Oct. 1985.
[42] A. R. Bergen, D. J. Hill, and C. L. de Marcot, “Lyapunov functionfor multimachine power systems with generator flux decay and voltagedependent loads,” Int. J. Electr. Power Energy Syst., vol. 8, pp. 2–10,Jan. 1986.
[43] R. J. Davy and I. A. Hiskens, “Lyapunov functions for multimachinepower systems with dynamic loads,” IEEE Trans. Circuits Syst. I,Fundam. Theory Appl., vol. 44, pp. 796–812, Sep. 1997.
[44] C. C. Chu and H. D. Chiang, “Constructing analytical energy functionsfor network-preserving power system models,” Circuits Syst. SignalProcess., vol. 24, pp. 363–383, Aug. 2005.
[45] A. I. Zeŝević and D. D. Ŝiljak, Control of Complex Systems: StructuralConstraints and Uncertainty, ser. Communications and Control Engi-neering. New York, NY, USA: Springer, 2010.
[46] S. K. Joo, C. C. Liu, L. E. Jones, and J. W. Choe, “Coherency and ag-gregation techniques incorporating rotor and voltage dynamics,” IEEETrans. Power Syst., vol. 19, pp. 1068–1075, May 2004.
[47] L. Vandenberghe and S. Boyd, “Semidefinite programming,” SIAMRe-view, vol. 38, no. 1, pp. 49–95, Mar. 1996.
[48] B. Reznick, “Some concrete aspects of Hilbert’s 17th problem,” inContemporary Mathematics, C. N. Delzell and J. J. Madden, Eds. :American Mathematical Society, 2000, vol. 253, pp. 251–272.
[49] V. Powers and T. Wörman, “An algorithm for sums of squares of realpolynomials,” J. Pure Appl. Algebra, vol. 127, pp. 99–104, May 1998.
[50] P. Parrilo, “Semidefinite programming relaxations for semialgebraicproblems,” Mathematical Programming Ser. B, vol. 96, no. 2, pp.293–320, May 2003.
Marian Anghel received the M.Sc. degree in engi-neering physics from the University of Bucharest,Romania, in 1985 and the Ph.D. degree in physicsfrom the University of Colorado at Boulder, CO,USA, in 1999.He is currently a technical staff member with the
Computer, Computational and Statistical SciencesDivision at the Los Alamos National Laboratory,Los Alamos, NM, USA. His research interests in-clude statistical learning, forecasting, and inferencealgorithms, model reduction and optimal prediction
in large scale dynamical systems, and infrastructure modeling and analysis.
FedericoMilano (SM’09) received from the Univer-sity of Genoa, Italy, the electrical engineering degreeand the Ph.D. degree in 1999 and 2003, respectively.From 2001 to 2002 he worked at the University
of Waterloo, Waterloo, ON, Canada, as a VisitingScholar. He is currently an Associate Professorat the University of Castilla-La Mancha, CiudadReal, Spain. His research interests include voltagestability, electricity markets and computer-basedpower system modeling and analysis.
Antonis Papachristodoulou received theM.A./M.Eng. degree in electrical and informa-tion sciences from the University of Cambridge,Cambridge, U.K., in 2000, as a member of RobinsonCollege. In 2005 he received the Ph.D. degree incontrol and dynamical systems, with a minor in aero-nautics from the California Institute of Technology,Pasadena, CA, USA.In 2005 he held a David Crighton Fellowship at
the University of Cambridge and a postdoctoral re-search associate position at the California Institute of
Technology before joining the Department of Engineering Science at the Uni-versity of Oxford, Oxford, U.K., in January 2006, where he is now a UniversityLecturer in Control Engineering and tutorial fellow at Worcester College. Hisresearch interests include scalable analysis of nonlinear systems using convexoptimization based on Sum of Squares programming and analysis and design oflargescale networked control systems with communication constraints.