Embed Size (px)
Citation preview

369
CHAPTER 19
ERROR ELLIPSE
19.1 INTRODUCTION
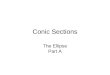
As discussed previously, after completing a least squares adjustment, the es-timated standard deviations in the coordinates of an adjusted station can becalculated from covariance matrix elements. These standard deviations pro-vide error estimates in the reference axes directions. In graphical represen-tation, they are half the dimensions of a standard error rectangle centered oneach station. The standard error rectangle has dimensions of 2Sx by 2Sy asillustrated for station B in Figure 19.1, but this is not a complete representationof the error at the station.
Simple deductive reasoning can be used to show the basic problem. As-sume in Figure 19.1 that the XY coordinates of station A have been computedfrom the observations of distance AB and azimuth AzAB that is approximately30�. Further assume that the observed azimuth has no error at all but that thedistance has a large error, say �2 ft. From Figure 19.1 it should then bereadily apparent that the largest uncertainty in the station’s position wouldnot lie in either cardinal direction. That is, neither Sx nor Sy represents thelargest positional uncertainty for the station. Rather, the largest uncertaintywould be collinear with line AB and approximately equal to the estimatederror in the distance. In fact, this is what happens.
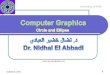
In the usual case, the position of a station is uncertain in both directionand distance, and the estimated error of the adjusted station involves the errorsof two jointly distributed variables, the x and y coordinates. Thus, the posi-tional error at a station follows a bivariate normal distribution. The generalshape of this distribution for a station is shown in Figure 19.2. In this figure,the three-dimensional surface plot [Figure 19.2(a)] of a bivariate normal dis-
Adjustment Computations: Spatial Data Analysis, Fourth Edition. C. D. Ghilani and P. R. Wolf© 2006 John Wiley & Sons, Inc. ISBN: 978-0-471-69728-2

370 ERROR ELLIPSE
Figure 19.1 Standard error rectangle.
Figure 19.2 (a) Three-dimensional view and (b) contour plot of a bivariate normaldistribution.
tribution curve is shown along with its contour plot [Figure 19.2(b)]. Notethat the ellipses shown in the xy plane of Figure 19.2(b) can be obtained bypassing planes of varying levels through Figure 19.2(a) parallel to the xyplane. The volume of the region inside the intersection of any plane with thesurface of Figure 19.2(a) represents the probability level of the ellipse. Theorthogonal projection of the surface plot of Figure 19.2(a) onto the xz planewould give the normal distribution curve of the x coordinate, from which Sx
is obtained. Similarly, its orthogonal projection onto the yz plane would givethe normal distribution in the y coordinate from which Sy is obtained.
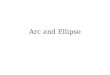
To fully describe the estimated error of a station, it is only necessary toshow the orientation and lengths of the semiaxes of the error ellipse. A de-tailed diagram of an error ellipse is shown in Figure 19.3. In this figure, thestandard error ellipse of a station is shown (i.e., one whose arcs are tangent

19.2 COMPUTATION OF ELLIPSE ORIENTATION AND SEMIAXES 371
Figure 19.3 Standard error ellipse.
Figure 19.4 Two-dimensional rotation.
to the sides of the standard error rectangle). The orientation of the ellipsedepends on the t angle, which fixes the directions of the auxiliary, orthogonaluv axes along which the ellipse axes lie. The u axis defines the weakestdirection in which the station’s adjusted position is known. In other words, itlies in the direction of maximum error in the station’s coordinates. The v axisis orthogonal to u and defines the strongest direction in which the station’sposition is known, or the direction of minimum error. For any station, thevalue of t that orients the ellipse to provide these maximum and minimumvalues can be determined after the adjustment from the elements of the co-variance matrix.
The exact probability level of the standard error ellipse is dependent onthe number of degrees of freedom in the adjustment. This standard errorellipse can be modified in dimensions through the use of F statistical valuesto represent an error probability at any percentage selected. It will be shownlater that the percent probability within the boundary of standard error ellipsefor a simple closed traverse is only 35%. Surveyors often use the 95% prob-ability since this affords a high level of confidence.
19.2 COMPUTATION OF ELLIPSE ORIENTATION AND SEMIAXES
As shown in Figure 19.4, the method for calculating the orientation angle tthat yields maximum and minimum semiaxes involves a two-dimensional co-

372 ERROR ELLIPSE
ordinate rotation. Notice that the t angle is defined as a clockwise angle fromthe y axis to the u axis. To propagate the errors in a point I from the xysystem into an orthogonal uv system, the generalized law of the propagationof variances, discussed in Chapter 6, is used. The specific value for t thatyields the maximum error along the u axis must be determined. The followingsteps accomplish this task.
Step 1: Any point I in the uv system can be represented with respect to itsxy coordinates as
u � x sin t � y cos ti i i (19.1)
v � �x cos t � y sin ti i i
Rewriting Equations (19.1) in matrix form yields
u sin t cos t xi i� (19.2)� � � �� �v �cos t sin t yi i
or in simplified matrix notation,
Z � RX (19.3)
Step 2: Assume that for the adjustment problem in which I appears, there isa Qxx matrix for the xy coordinate system. The problem is to develop, fromthe Qxx matrix, a new covariance matrix Qzz for the uv coordinate system.This can be done using the generalized law for the propagation of vari-ances, given in Chapter 6 as
2 T� � S RQ R (19.4)zz 0 xx
where
sin t cos tR � � ��cos t sin t
Since is a scalar, it can be dropped temporarily and recalled again2S0
after the derivation. Thus,
q qT uu uvQ � RQ R � (19.5)� �zz xx q quv vv
where

19.2 COMPUTATION OF ELLIPSE ORIENTATION AND SEMIAXES 373
q qxx xyQ � � �xx q qxy yy
Step 3: Expanding Equation (19.5), the elements of the Qzz matrix are
Q �zz
�2q sin t � q cos t sin txx xy� �2� q sin t cos t � q cos txy yy
2�q cos t sin t � q sin txx xy� �2�q cos t � q sin t cos txy yy
2�q sin t cos t � q cos txx xy� �2�q sin t � q cos t sin txy yy
2q cos t � q sin t cos txx xy� �2�q cos t sin t � q sin txy yy
�q quu uv� � �q quv vv
(19.6)
Step 4: The quu element of Equation (19.6) can be rewritten as
2 2q � q sin t � 2q cos t sin t � q cos t (19.7)uu xx xy yy
The following trigonometric identities are useful in developing an equationfor t:
sin 2t � 2 sin t cos t (a)
2 2cos 2t � cos t � sin t (b)
2 2cos t � sin t � 1 (c)
Substituting identity (a) into Equation (19.7) yields
sin 2t2 2q � q sin t � q cos t � 2q (19.8)uu xx yy xy 2
Regrouping the first two terms and adding the necessary terms to Equation(19.8) to maintain equality yields
22q � q q cos tq sin txx yy yyxx2 2q � (sin t � cos t) � �uu 2 2 22 2q sin t q cos tyy xx� � � q sin 2t (19.9)xy2 2
Substituting identity (c) and regrouping Equation (19.9) results in

374 ERROR ELLIPSE
TABLE 19.1 Selection of the Proper Quadrantfor 2t a
Algebraic Sign of
sin 2t cos 2t Quadrant
� � 1� � 2� � 3� � 4
a When calculating for t, always remember to select the properquadrant of 2t before dividing by 2.
q � q qxx yy yy 2 2q � � (cos t � sin t)uu 2 2
qxx 2 2� (cos t � sin t) � q sin 2t (19.10)xy2
Finally, substituting identity (b) into Equation (19.10) yields
q � q q � qxx yy yy xxq � � cos 2t � q sin 2t (19.11)uu xy2 2
To find the value of t that maximizes quu, differentiate quu in Equation(19.8) with respect to t and set the results equal to zero. This results in
q � qdq yy xxuu � � 2 sin 2t � 2q cos 2t � 0 (19.12)xydt 2
Reducing Equation (19.12) yields
(q � q ) sin 2t � 2q cos 2t (19.13)yy xx xy
Finally, dividing Equation (19.13) by cos 2t yields
2qsin 2t xy� tan 2t � (19.14a)
cos 2t q � qyy xx
Equation (19.14a) is used to compute 2t and hence the desired angle tthat yields the maximum value of quu. Note that the correct quadrant of 2tmust be determined by noting the sign of the numerator and denominatorin Equation (19.14a) before dividing by 2 to obtain t. Table 19.1 showsthe proper quadrant for the different possible sign combinations of the

19.2 COMPUTATION OF ELLIPSE ORIENTATION AND SEMIAXES 375
numerator and denominator.Table 19.1 can be avoided by using the atan2 function available in most
software packages. This function returns a value between �180� � 2t �180�. If the value returned is negative, the correct value for 2t is obtainedby adding 360�. Correct use of the atan2 function is
2t � atan 2(q � q , 2q ) (19.14b)yy xx xy
The use of Equation (19.14b) is demonstrated in the Mathcad worksheetfor this chapter on the CD that accompanies this book.
Correlation between the latitude and departure of a station was discussedin Chapter 8. Similarly, the adjusted coordinates of a station are also cor-related. Computing the value of t that yields the maximum and minimumvalues for the semiaxes is equivalent to rotating the covariance matrix untilthe off-diagonals are nonzero. Thus, the u and v coordinate values will beuncorrelated, which is equivalent to setting the quv element of Equation(19.6) equal to zero. Using the trigonometric identities noted previously,the element quv from Equation (19.6) can be written as
q � qxx yyq � sin 2t � q cos 2t (19.15)uv xy2
Setting quv equal to zero and solving for t gives us
2qsin 2t xy� tan 2t � (19.16)
cos 2t q � qyy xx
Note that this yields the same result as Equation (19.14), which verifiesthe removal of the correlation.
Step 5: In a fashion similar to that demonstrated in step 4, the qvv elementof Equation (19.6) can be rewritten as
2 2q � q cos t � 2q cos t sin t � q sin t (19.17)vv xx xy yy
In summary, the t angle, semimajor ellipse axis (quu), and semiminor axis(qvv) are calculated using Equations (19.14), (19.7), and (19.17), respectively.These equations are repeated here, in order, for convenience. Note that theseequations use only elements from the covariance matrix.
2qxytan 2t � (19.18)q � qyy xx
2 2q � q sin t � 2q cos t sin t � q cos t (19.19)uu xx xy yy

376 ERROR ELLIPSE
2 2q � q cos t � 2q cos t sin t � q sin t (19.20)vv xx xy yy
Equation (19.18) gives the t angle that the u axis makes with the y axis.Equation (19.19) yields the numerical value for quu, which when multipliedby the reference variance gives the variance along the u axis. The square2S0
root of the variance is the semimajor axis of the standard error ellipse. Equa-tion (19.20) yields the numerical value for qvv, which when multiplied by
gives the variance along the v axis. The square root of this variance is the2S0
semiminor axis of the standard error ellipse. Thus, the semimajor and semi-minor axes are
S � S �q and S � S �q (19.21)u 0 uu v 0 vv
19.3 EXAMPLE PROBLEM OF STANDARD ERRORELLIPSE CALCULATIONS
In this section the error ellipse data for the trilateration example in Section14.5 are calculated. From the computer listing given for the solution of thatproblem, the following values are recalled:
1. S0 � �0.136 ft2. The unknown X and covariance Qxx matrices were
dXWisconsin
dYWisconsinX �dXCampus� �dYCampus
1.198574 �1.160249 �0.099772 �1.402250�1.160249 2.634937 0.193956 2.725964
Q �xx �0.099772 0.193956 0.583150 0.460480� ��1.402250 2.725964 0.460480 3.962823
19.3.1 Error Ellipse for Station Wisconsin
The tangent of 2t is
2(�1.160249)tan 2t � � �1.6155
2.634937 � 1.198574
Note that the sign of the numerator is negative and the denominator ispositive. Thus, from Table 19.1, angle 2t is in the fourth quadrant and 360�must be added to the computed angle. Hence,

19.3 EXAMPLE PROBLEM OF STANDARD ERROR ELLIPSE CALCULATIONS 377
�12t � tan (�1.6155) � �58�14.5� � 360� � 301�45.5�
t � 150�53�
Substituting the appropriate values into Equation (19.21), Su is
S � �0.136u
2 2� �1.198574 sin t � 2(�1.160249) cos t sin t � 2.634937 cos t
� �0.25 ft
Similarly substituting the appropriate values into Equation (19.21), Sv is
S � �0.136v
2 2� �1.198574 cos t � 2(�1.160249) cos t sin t � 2.634937 sin t
� �0.10 ft
Note that the standard deviations in the coordinates, as computed by Equation(13.24), are
S � S �q � �0.136�1.198574 � �0.15 ftx 0 xx
S � S �q � �0.136�2.634937 � �0.22 fty 0 yy
19.3.2 Error Ellipse for Station Campus
Using the same procedures as in Section 19.3.1, the error ellipse data forstation Campus are
2 � 0.460480�12t � tan � 15�14�
3.962823 � 0.583150
t � 7�37�
S � �0.136u
2 2� �0.583150 sin t � 2(0.460480) cos t sin t � 3.962823 cos t
� �0.27 ft
S � �0.136v
2 2� �0.583150 cos t � 2(0.460480) cos t sin t � 3.962823 sin t
� �0.10 ft

378 ERROR ELLIPSE
Figure 19.5 Graphical representation of error ellipses.
S � S �q � �0.136�0.583150 � �0.10 ftx 0 xx
S � S �q � �0.136�3.962823 � �0.27 fty 0 yy
19.3.3 Drawing the Standard Error Ellipse
To draw the error ellipses for stations Wisconsin and Campus of Figure 19.5,the error rectangle is first constructed by laying out the values of Sx and Sy
using a convenient scale along the x and y adjustment axes, respectively. Forthis example, an ellipse scale of 4800 times the map scale was selected. Thet angle is laid off clockwise from the positive y axis to construct the u axis.The v axis is drawn 90� counterclockwise from u to form a right-handedcoordinate system. The values of Su and Sv are laid off along the U and Vaxes, respectively, to locate the semiaxis points. Finally, the ellipse is con-structed so that it is tangent to the error rectangle and passes through itssemiaxes points (refer to Figure 19.3).
19.4 ANOTHER EXAMPLE PROBLEM
In this section, the standard error ellipse for station u in the example ofSection 16.4 is calculated. For the adjustment, S0 � �1.82 ft, and the X andQxx matrices are
dx q q 0.000532 0.000602u xx xyX � Q � �� � � � � �xxdy q q 0.000602 0.000838u xy yy
Error ellipse calculations are

19.5 ERROR ELLIPSE CONFIDENCE LEVEL 379
Figure 19.6 Graphical representation of error ellipse.
2 � 0.000602�12t � tan � 75�44�
0.000838 � 0.000532
t � 37�52�
S � �1u
2 2� �0.000532 sin t � 2(0.000602) cos t sin t � 0.000838 cos t
� �0.036 ft
S � �1v
2 2� �0.000532 cos t � 2(0.000602) cos t sin t � 0.000838 sin t
� �0.008 ft
S � �1�0.000532 � �0.023 ftx
S � �1�0.000838 � �0.029 fty
Figure 19.6 shows the plotted standard error ellipse and its error rectangle.
19.5 ERROR ELLIPSE CONFIDENCE LEVEL
The calculations in Sections 19.3 and 19.4 produce standard error ellipses.These ellipses can be modified to produce error ellipses at any confidencelevel � by using an F statistic with two numerator degrees of freedom andthe degrees of freedom for the adjustment in the denominator. Since the Fstatistic represents variance ratios for varying degrees of freedom, it can be

380 ERROR ELLIPSE
TABLE 19.2 F�,2,degrees of freedom Statistics for Selected Probability Levels
Degrees of Freedom
Probability
90% 95% 99%
1 49.50 199.5 4999.502 9.00 19.00 99.003 5.46 9.55 30.824 4.32 6.94 18.005 3.78 5.79 13.27
10 2.92 4.10 7.5615 2.70 3.68 6.3620 2.59 3.49 5.8530 2.49 3.32 5.3960 2.39 3.15 4.98
expected that with increases in the number of degrees of freedom, there willbe corresponding increases in precision. The F(�,2,degrees of freedom) statistic mod-ifier for various confidence levels is listed in Table 19.2. Notice that as thedegrees of freedom increase, the F statistic modifiers decrease rapidly andbegin to stabilize for larger degrees of freedom. The confidence level of anerror ellipse can be increased to any level by using the multiplier
c � �2F (19.22)(�,2,degrees of freedom)
Using the following equations, the percent probability for the semimajor andsemiminor axes can be computed as
S � S c � S �2Fu% u u (�,2,degrees of freedom)
S � S c � S �2Fv% v v (�,2,degrees of freedom)
From the foregoing it should be apparent that as the number of degrees offreedom (redundancies) increases, precision increases, and the error ellipsesizes decrease. Using the techniques discussed in Chapter 4, the values listedin Table 19.2 are for the F distribution at 90% (� � 0.10), 95% (� � 0.05),and 99% (� � 0.01) probability. These probabilities are most commonly used.Values from this table can be substituted into Equation (19.22) to determinethe value of c for the probability selected and the given number of redundan-cies in the adjustment. This table is for convenience only and does not containthe values necessary for all situations that might arise.
Example 19.1 Calculate the 95% error ellipse for station Wisconsin of Sec-tion 19.3.1.

19.6 ERROR ELLIPSE ADVANTAGES 381
SOLUTION Using Equations (19.23) yields
S � �0.25�2(199.50) � �4.99 ftu95%
S � �0.10�2(199.50) � �2.00 ftv95%
S � �2(199.50)S � �(19.97 � 0.15) � 3.00 ftx x95%
S � �2(199.50)S � �(19.97 � 0.22) � 4.39 fty y95%
The probability of the standard error ellipse can be found by setting themultiplier equal to 1 so that � 0.5. For a simple closed traverse2F F�,� ,� �,� ,�1 2 1 2
with three degrees of freedom, this means that F�,2,3 � 0.5. The value of �that satisfies this condition is 0.65 and was found by trial-and-error proceduresusing the program STATS. Thus, the percent probability of the standard errorellipse in a simple closed traverse is (1 � 0.65) � 100%, or 35%. The readeris encouraged to verify this result using program STATS. It is left as anexercise for the reader to show that the percent probability for the standarderror ellipse ranges from 35% to only 39% for horizontal surveys that havefewer than 100 degrees of freedom.
19.6 ERROR ELLIPSE ADVANTAGES
Besides providing critical information regarding the precision of an adjustedstation position, a major advantage of error ellipses is that they offer a methodof making a visual comparison of the relative precisions between any twostations. By viewing the shapes, sizes, and orientations of error ellipses, var-ious surveys can be compared rapidly and meaningfully.
19.6.1 Survey Network Design
The sizes, shapes, and orientations of error ellipses depend on (1) the controlused to constrain the adjustment, (2) the observational precisions, and (3) thegeometry of the survey. The last two of these three elements are variablesthat can be altered in the design of a survey to produce optimal results. Indesigning surveys that involve the traditional observations of distances andangles, estimated precisions can be computed for observations made withdiffering combinations of equipment and field procedures. Also, trial varia-tions in station placement, which creates the network geometry, can be made.Then these varying combinations of observations and geometry can be pro-

382 ERROR ELLIPSE
cessed through least squares adjustments and the resulting station error ellip-ses computed, plotted, and checked against the desired results. Onceacceptable goals are achieved in this process, the observational equipment,field procedures, and network geometry that provide these results can beadopted. This overall process is called network design. It enables surveyorsto select the equipment and field techniques, and to decide on the numberand locations of stations that provide the highest precision at lowest cost. Thiscan be done in the office using simulation software before bidding a contractor entering the field.
In designing networks to be surveyed using the traditional observations ofdistance, angle, and directions, it is important to understand the relationshipsof those observations to the resulting positional uncertainties of the stations.The following relationships apply:
1. Distance observations strengthen the positions of stations in directionscollinear with the lines observed.
2. Angle and direction observations strengthen the positions of stations indirections perpendicular to the lines of sight.
A simple analysis made with reference to Figure 19.1 should clarify thetwo relationships above. Assume first that the length of line AB was measuredprecisely but its direction was not observed. Then the positional uncertaintyof station B should be held within close tolerances by the distance observed,but it would only be held in the direction collinear with AB. The distanceobservation would do nothing to keep line AB from rotating, and in fact theposition of B would be weak perpendicular to AB. On the other hand, if thedirection of AB had been observed precisely but its length had not beenmeasured, the positional strength of station B would be strongest in the di-rection perpendicular to AB. But an angle observation alone does nothing tofix distances between observed stations, and thus the position of station Bwould be weak along line AB. If both the length and direction AB wereobserved with equal precision, a positional uncertainty for station B that ismore uniform in all directions would be expected. In a survey network thatconsists of many interconnected stations, analyzing the effects of observationsis not quite as simple as was just demonstrated for the single line AB. Nev-ertheless, the two basic relationships stated above still apply.
Uniform positional strength in all directions for all stations is the desiredgoal in survey network design. This would be achieved if, following leastsquares adjustment, all error ellipses were circular in shape and of equal size.Although this goal is seldom completely possible, by diligently analyzingvarious combinations of geometric figures together with different combina-tions of observations and precisions, this goal can be approached. Sometimes,however, other overriding factors, such as station accessibility, terrain, andvegetation, preclude actual use of an optimal design.

19.6 ERROR ELLIPSE ADVANTAGES 383
Figure 19.7 Network analysis using error ellipses: (a) trilateration for 19 distances;(b) triangulation for 19 angles.
The network design process discussed above is significantly aided by theuse of aerial photos and/or topographic maps. These products enable thelayout of trial station locations and permits analysis of the accessibility andintervisibility of these stations to be investigated. However, a field reconnais-sance should be made before adopting the final design.
The global positioning system (GPS) has brought about dramatic changesin all areas of surveying, and network design is not an exception. AlthoughGPS does require overhead visibility at each receiver station for trackingsatellites, problems of intervisibility between ground stations is eliminated.Thus, networks having uniform geometry can normally be laid out. Becauseeach station in the network is occupied in a GPS survey, the XYZ coordinatesof the stations can be determined. This simplifies the problem of designingnetworks to attain error ellipses of uniform shapes and sizes. However, thegeometric configuration of satellites is an important factor that affects stationprecisions. The positional dilution of precision (PDOP) can be a guide to thegeometric strength of the observed satellites. In this case, the lower the PDOP,the stronger the satellite geometry. For more discussion on designing GPSsurveys, readers are referred to books devoted to the subject of GPS sur-veying.
19.6.2 Example Network
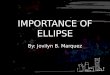
Figure 19.7 shows error ellipses for two survey networks. Figure 19.7(a)illustrates the error ellipses from a trilateration survey with the nine stations,

384 ERROR ELLIPSE
two of which (Red and Bug) were control stations. The survey includes 19distance observations and five degrees of freedom. Figure 19.7(b) shows theerror ellipses of the same network that was observed using triangulation anda baseline from stations Red to Bug. This survey includes 19 observed anglesand thus also has five degrees of freedom.
With respect to these two figures, and keeping in mind that the smaller theellipse, the higher the precision, the following general observations can bemade:
1. In both figures, stations Sand and Birch have the highest precisions.This, of course, is expected due to their proximity to control stationBug and because of the density of observations made to these stations,which included direct measurements from both control stations.
2. The large size of error ellipses at stations Beaver, Schutt, Bunker, andBee of Figure 19.7(b) show that they have lower precision. This, too,is expected because there were fewer observations made to those sta-tions. Also, neither Beaver nor Bee was connected directly by obser-vation to either of the control stations.
3. Stations White and Schutt of Figure 19.7(a) have relatively high east–west precisions and relatively low north–south precisions. Examinationof the network geometry reveals that this could be expected. Distancemeasurements to those two points from station Red, plus an observeddistance between White and Schutt, would have greatly improved thenorth–south precision.
4. Stations Beaver and Bunker of Figure 19.7(a) have relatively low pre-cisions east–west and relatively high precisions north–south. Again, thisis expected when examining the network geometry.
5. The smaller error ellipses of Figure 19.7(a) suggest that the trilaterationsurvey will yield superior precision to the triangulation survey of Figure19.7(b). This is expected since the EDM had a stated uncertainty of�(5 mm � 5 ppm). In a 5000-ft distance this yields an uncertainty of�0.030 ft. To achieve the same precision, the comparable angle uncer-tainty would need to be
S �0.030�� � � � � 206,264.8� / rad � �1.2�
R 5000
The proposed instrument and field procedures for the project thatyielded the error ellipses of Figure 19.7(b) had an expected uncertaintyof only �6�. Very probably, this ultimate design would include bothobserved distances and angles.
These examples serve to illustrate the value of computing station errorellipses in an a priori analysis. The observations were made easily and quickly

19.7 OTHER MEASURES OF STATION UNCERTAINTY 385
TABLE 19.3 Other Measures of Two-DimensionalPositional Uncertainties
Probability (%) c Name
35–39 1.00 Standard error ellipse50.0 1.18 Circular error probable (CEP)63.2 1.41 Distance RMS (DRMS)86.5 2.00 Two-sigma ellipse95.0 2.45 95% confidence level98.2 2.83 2DRMS98.9 3.00 Three-sigma ellipse
TABLE 19.4 Measures of Three-Dimensional Positional Uncertainties
Probability (%) c Name
19.9 1.00 Standard ellipsoid50.0 1.53 Spherical error probable (SEP)61.0 1.73 Mean radical spherical error (MRSE)73.8 2.00 Two-sigma ellipsoid95.0 2.80 95% confidence level97.1 3.00 Three-sigma ellipsoid
by comparison of the ellipses in the two figures. Similar information wouldhave been difficult, if not impossible, to determine from standard deviations.By varying the survey it is possible ultimately to find a design that providesoptimal results in terms of meeting a uniformly acceptable precision andsurvey economy.
19.7 OTHER MEASURES OF STATION UNCERTAINTY
Other measures of accuracies are sometimes called for in specifications. Asdiscussed in Section 19.5, the standard error ellipse has a c-multiplier of 1.00and a probability between 35 and 39%. Other common errors and probabilitiesare given in Table 19.3.
As demonstrated in the Mathcad worksheet on the CD that accompaniesthis book, the process of rotating the 2 � 2 block diagonal matrix for a stationis the mathematical equivalent of orthogonalization. This process can be per-formed by computing eigenvalues and eigenvectors. For example, the eigen-values of the 2 � 2 block diagonal matrix for station Wisconsin in Example19.2 are 0.55222 and 3.28129, respectively. Thus, SU-Wis is 0.136�3.28129� �0.25 ft and SV-Wis is � �0.101 ft.0.136�0.55222

386 ERROR ELLIPSE
This property can be used to compute the error ellipsoids for three-dimensional coordinates from a GPS adjustment or the three-dimensional ge-odetic network adjustment discussed in Chapter 23. That is, the uncertaintiesalong the three orthogonal axes of the error ellipsoid can be computed usingeigenvalues of the 3 � 3 block diagonal matrix appropriate for each station.The common measures for ellipsoids are listed in Table 19.4.
PROBLEMS
Note: For problems requiring least squares adjustment, if a computer programis not distinctly specified for use in the problem, it is expected that the leastsquares algorithm will be solved using the program MATRIX, which is in-cluded on the CD supplied with the book.
19.1 Calculate the semiminor and semimajor axes of the standard errorellipse for the adjusted position of station U in Example 14.2. Plotthe figure using a scale of 1�12,000 and the error ellipse using anappropriate scale.
19.2 Calculate the semiminor and semimajor axes of the 95% confidenceerror ellipse for Problem 19.1. Plot this ellipse superimposed over theellipse of Problem 19.1.
19.3 Repeat Problem 19.1 for Example 15.1.
19.4 Repeat Problem 19.2 for Problem 19.3.
19.5 Repeat Problem 19.1 for the adjusted position of stations B and C ofExample 15.3. Use a scale of 1�24,000 for the figure and plot theerror ellipses using an appropriate multiplication factor.
Calculate the error ellipse data for the unknown stations in each problem.
19.6 Problem 15.2
19.7 Problem 15.5
19.8 Problem 15.6
19.9 Problem 15.9
19.10 Problem 15.12
19.11 Problem 16.2
19.12 Problem 16.3
19.13 Problem 16.7
19.14 Problem 16.9

PROBLEMS 387
Using a level of significance of 0.05, compute the 95% probable error ellipsefor the stations in each problem.
19.15 Problem 15.2
19.16 Problem 16.3
19.17 Using the program STATS, determine the percent probability of thestandard error ellipse for a horizontal survey with:(a) 3 degrees of freedom.(b) 9 degrees of freedom.(c) 20 degrees of freedom.(d) 50 degrees of freedom.(e) 100 degrees of freedom.
Programming Problems
19.18 Develop a computational program that takes the Qxx matrix and 2S0
from a horizontal adjustment and computes error ellipse data for theunknown stations.
19.19 Develop a computational program that does the same as described forProblems 19.15 and 19.16.