Embed Size (px)
Citation preview

748 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 17, NO. 5, OCTOBER 2001
Active Global Localization for a Mobile Robot UsingMultiple Hypothesis Tracking
Patric Jensfelt and Steen Kristensen
Abstract—In this paper we present a probabilistic approach formobile robot localization using an incomplete topological worldmodel. The method, which we have termed multi-hypothesis lo-calization (MHL), uses multi-hypothesis Kalman filter based posetracking combined with a probabilistic formulation of hypothesiscorrectness to generate and track Gaussian pose hypotheses on-line. Apart from a lower computational complexity, this approachhas the advantage over traditional grid based methods that incom-plete and topological world model information can be utilized. Fur-thermore, the method generates movement commands for the plat-form to enhance the gathering of information for the pose estima-tion process. Extensive experiments are presented from two dif-ferent environments, a typical office environment and an old hos-pital building.
Index Terms—Bayesian, feature based, global localization, mul-tiple hypothesis.
I. INTRODUCTION
T HE PROBLEM of global localization—or “the kidnappedrobot problem”—is that of, from little or noa priori pose1
information, estimating the correct pose of a mobile robot withrespect to some global reference frame. This is fundamentallydifferent from thepose trackingproblem, i.e., maintaining an es-timate of the robot’s pose as the robot moves. Withpose estima-tion we will denote the general problem of determining wherethe robot is.
Pose estimation is essential to mobile robot navigation andas a consequence, a substantial amount of work has been per-formed in this area [1]. However, the large majority of this workhas been concentrated on the pose tracking problem whereasglobal localization has received less attention. This is due to thefact that many robot systems get their initial pose supplied di-rectly or indirectly from the user which means that global po-sitioning may be omitted. However, for the general problem ofautonomous navigation, initialization is crucial. This is relevantnot only at startup, but also during operation for recovery in caseof pose tracking failure.
Manuscript received November 24, 2000; revised May 18, 2001. This paperwas recommended for publication by Associate Editor M. Buehler and EditorS. Hutchinson upon evaluation of the reviewers’ comments. . This work wassupported in part by the Swedish Foundation for Strategic Research through theCentre for Autonomous Systems.
P. Jensfelt is with the Centre for Autonomous Systems, Royal Institute ofTechnology, SE-100 44 Stockholm, Sweden (e-mail: [email protected]).
S. Kristensen is with the Cognition and Robotics Group, DaimlerChryslerResearch and Technology, D-10559 Berlin, Germany (e-mail: [email protected]).
Publisher Item Identifier S 1042-296X(01)09740-3.
1We will distinguish between the robotpositionwhich is a 2-tuple,(x; y), andthe robotpose,which includes the orientation thus being a 3-tuple,(x; y; �).
The general approach to global localization (when not usingGPS or “artificial” beacons such as bar codes and transponders)is to compare information—or features in the widest sense—ex-tracted from sensor readings with ana priori map associatedwith the global reference frame. Each comparison carries someevidence about where the robot may be, and the challenge isthen, as efficiently as possible, to find the correct pose. Theefficiency thus depends on two factors: 1) the amount of evi-dence acquired with each feature/map comparison and 2) theefficiency of the evidence fusion (relative to the effort of per-forming these operations). It is evident that this strongly de-pends on the chosen framework and the representation of maps,“pose space” and pose hypotheses.
Our approach is based on topological world models [2], ex-tended with landmarks and visibility information (for more de-tails, see Fig. 5 and [3]). However, it cannot be guaranteed thatthe models are complete or that the world cannot look differ-ently at some later point in time when the robot is navigatingautonomously in the environment. Except for mobile robot sys-tems navigating in extremely controlled environments this is ageneral problem. Therefore the framework should be able tohandle incomplete and partially incorrect world models.
In our system, we use a Kalman filtering technique to repre-sent and update the pose of the robot. As this is a standard andwell-proven approach [4] used in many mobile robot systemswe would like to keep it and have a seamless integration withthe global localization scheme. We want to explicitly representand treat model errors, which we think is best done using a prob-abilistic framework. We have, therefore, developed a hybrid lo-calization method using Kalman filtering to track a number ofpose hypotheses and probability theory for evidence fusion. Fur-thermore, to optimize the amount of new evidence gathered bythe perception system, the pose hypotheses and the world modelinformation are used to generate movement commands for therobot, thus making the localization processactive.
In Section II we outline other work done on the global local-ization problem. In Section III the generation and tracking ofpose hypotheses is described, followed by a description of howwe estimate the correctness of each hypothesis in Section IV.In Section VII it is explained how movement commands for therobot are generated in order for it to gather new information.The experiments conducted are presented in Section VIII andfinally in Section IX, the results are discussed and conclusionsare drawn.
II. RELATED WORK
Most of the pose estimation literature has concentrated onthe pose tracking problem. Often this is not stated explicitly but
1042–296X/01$10.00 © 2001 IEEE

JENSFELT AND KRISTENSEN: ACTIVE GLOBAL LOCALIZATION FOR A MOBILE ROBOT 749
assumed implicitly in the sense that either the pose estimationproblem is simply defined as being the pose tracking problemor the methods assume a good initial estimate of the robot pose.
An early example of addressing the global localizationproblem is [2] where, in the context of topological mapbuilding, therehearsal procedureis introduced. This consists intesting a global pose hypothesis by examining if the robot canmove in the environment as predicted by the topological graph.
In [5] the global localization problem is addressed as a caseof the general object recognition problem. The basic observationis that the localization problem is solved if the robot can recog-nize some place (a room, a hallway, etc.), represented as a 2-Dobject, and determine the relative pose to it. This is done effi-ciently using geometric hashing [6]. A similar approach is takenin [7] where PCA analysis is used to generate pose hypotheseswhich are tracked with Kalman filters until a unique “match” isdetermined. Common to these approaches is that they require arelatively complete model of the environment, but in return theyare robust toward a certain degree of sensor noise and model un-certainty.
However, most recently approaches explicitly dealing withsensing, model and movement uncertainty have appeared[8]–[12]. Common to these approaches is that they use aprobabilistic formulation to represent and update the poseof the robot. This has the advantage of enabling them tohandle uncertainty in a natural and convenient manner. Theseapproaches, also known as Markovian methods, use a spatiallydiscretized representation of the environment where each cellholds the probability that the robot occupies the area repre-sented by the cell. They use a two-step procedure to update thisrepresentation, namely (using their nomenclature) themovestepwhere the fact that the robot moves is accounted for byshifting probability mass between cells according to the robotmovement, and thesense stepwhere Bayesian updating is usedto incorporate new evidence stemming from a feature/mapcomparison. In general, the sense step concentrates probabilitymass in some areas and the move step disperses it. This“blurring” is due to the fact that the probability mass is notonly shifted but also smeared to account for robot movementinaccuracies. For the global localization to “converge,” it isimportant that the evidence achieved in the sense step more thancompensates for the additional pose uncertainty introduced bythe move step. This fact stresses the importance of having anefficient movement/sensing strategy, i.e., to do active sensing,since moving randomly in general does guarantee gainingevidence efficiently enough. In [13] the movement strategy ofthe robot is determined by minimizing the expected entropy.
The approaches described in [8]–[10] and in [11], [12],respectively, mainly differ in the pose representation. Theformer approaches use a coarse, topological representation (cellsize approx. 1 m) whereas the latter ones use a fine-grainedgrid (cell size approx. 0.1 m) representation similar to thewell-known occupancy grids for representing obstacles andfree-space. The advantage of the grid representation is that theyfacilitate the use of low level (“raw”) sensor data for updatingthe cell probabilities whereas topological models require theextraction of abstract features such as T-junctions, walls, andother landmarks. The disadvantage of the grid representation of
the pose space is the large number of cells which results in anincreased computational complexity and makes the calculationof optimal sensing/movement strategies very challenging.This, on the other hand, is the advantage of the topologicalrepresentations which are very nicely suited for the generationof optimal sensing/movement policies using the framework ofpartially observable Markov decision processes (POMDP’s)and Bayesian decision theory [14].
In [15] a new version of the Markov localization methodis presented, called Monte Carlo localization (MCL). By rep-resenting the probability distribution using a set of samples,almost arbitrary distributions can be represented and no dis-cretization has to be done. The computational complexity is alsoreduced significantly. The sample based representation has alsosuccessfully been applied to the map building problem [16].
For most of the above mentioned works, the representationof pose state space and thea priori given world models aretightly matched. Topological world models are used in [8]–[10],whereas [11] and [12] use occupancy grid type world models.This is a natural approach, since it eliminates the need for map-pings between the estimated pose and the world model and facil-itates easy feature/map comparisons. Following this reasoning,we might have chosen a discrete, topological representation ofthe pose space. We were, however, interested in a seamless in-tegration with our existing systems which use acontinuousrep-resentation of pose in the form of a Kalman filter doing the posetracking. In [17] it is concluded that the Kalman filter methodsprovide high accuracy and efficiency.
The typical argument against using a continuous pose repre-sentation is that only a restricted set of distribution types, typi-cally unimodal ones, can be represented this way [8], [10], [15].Unimodal distributions are particularly unsuited for global lo-calization since they cannot represent the case where the poseis ambiguous, i.e., the case where the robot might as well beat one place as at another. This criticism, however, ignores thatfact that multiple unimodal distributions can be used to repre-sent the overall probability distribution. In [18] a set of Gaus-sians was used, each Gaussian representing one pose hypoth-esis. The advantage of this is that a standard Kalman based posetracking module can be used to independently update each hy-pothesis in a simple scheme, commonly known as multiple hy-pothesis tracking (MHT) or multiple target tracking [19], [20].The multi-Gaussian representation has also been used in [21]and [22]. The main difference to the work presented in this paperis that they do not explicitly consider world modeling aspectsand active sensing strategies.
A further advantage of using a set of Gaussians is that it en-ables us to explicitly reason about each hypothesis whereas withdiscrete representations, in principle all cells (and their probabil-ities) have to be taken into account before acting which is com-putationally challenging and is therefore often circumvented byperforming a thresholding on the probabilities. As a matter offact, in [12] the grid representation is thresholded and approxi-mated with a set of Gaussians.
A drawback of using a set of Gaussians is that the hypothesesper se do not carry any information about their correctness (apartfrom the fact that hypotheses with small variances may tend tobe the correct ones) since they all have “probability mass” 1.

750 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 17, NO. 5, OCTOBER 2001
It is, therefore, necessary to explicitly estimate the correctnessconfidence of each hypothesis. For this we have chosen to usea probabilistic approach since it seems to be the most adequateframework due to the explicit and elegant handling of sensingand model uncertainties.
III. POSEHYPOTHESISGENERATION AND TRACKING
The idea behind the multiple pose hypotheses generation andtracking technique presented in this paper is best illustrated witha figure. Fig. 1 shows a situation where the true position of therobot is given by the solid square in the middle of the room inthe figure.
A door is detected slightly to the right in front of the robot.Matching this feature to the map, consisting of four door in oneroom, results in eight likely robot poses. These eight poses giverise to eight hypotheses regarding the pose of the robot. The ideais that by making more observations of features in the environ-ment and matching these to the hypotheses, the hypothesis cor-responding to the true pose of the robot will gain most evidence,making it distinguishable from the other, false, hypotheses.
It is obvious that the amount of information that can be ex-tracted from a certain observation will depend on the featuretype and the uncertainty associated with map and feature detec-tion. The latter factor will be taken care of in Section IV wherethe probability of a hypothesis being true is discussed. The firstfactor will lead us to introduce the concept of creative and sup-portive features.
A. Features
The features are extracted from sensor data byrecognizers.Each recognizer is specialized in detecting a certain feature type.The recognizers will only report the occurrence of a new featurein the sensor data once. This is possible by storing the locationof each detected feature and comparing the newly extracted fea-tures with the stored ones [3].
Some features (e.g., doors) are full rank features, i.e., theyconstrain all three degrees of freedom, others (e.g., walls) willin the general case only determine the pose to be somewherealong a manifold. We have chosen to divide the features into twosets of features, namely creative () and supportive (). A cre-ative feature carries enough pose evidence to initiate a new hy-pothesis, whereas the supportive ones can only support alreadyexisting hypotheses. It is obvious that , i.e., a creativefeature can of give support to an already existing hypothesis.
B. Pose Hypotheses
Let the true pose of the robot be given by .The pose is modeled to evolve according to
(1)
where is the odometric information. We assume the noise,, associated with the odometric model, to be a zero-mean,
white, and Gaussian noise process with covariance matrix.Each hypothesis, , is an estimate of the true pose, based
on some assumptions regarding the association of extracted fea-tures to the features in the world model. The hypotheses are up-dated using a Kalman filter.
Fig. 1. The idea behind the multiple pose hypothesis generation and trackingillustrated in a simple environment with only one room with four doors.
A hypothesis is represented by a pose estimatewith an associated covariance matrix,
, and information about the probability of the hypothesisbeing the correct one .
The pose estimates and their covariance matrices are drivenby the odometric information according to the “time-update for-mula”:
(2)
where and are the Jacobians ofwith respect toand respectively. should be interpreted as thepredicted pose, given by hypothesis at time , usingmeasurements up to and until time.
Each detected feature creates a set of possible poses for therobot (compare with Fig. 1). Let us call these possible poses,pose candidates, . The representation for these pose candi-dates consists of a pose, a covariance matrix , and infor-mation about what feature created it. Let us also extend the con-cept of creative and supportive to include the pose candidates,i.e., a creative feature gives a creative pose candidate.
The pose candidates can be seen as measurements of the pose,generated by
detected feature (3)
where contains the map of the environment and the character-istics of the recognizers and is measurement noise. Thesepose candidates will be used to update the pose informationof the pose hypotheses and also potentially initiate new hy-potheses.
We make the assumption that all pose candidates can be rep-resented with a mean value and a covariance matrix .This will limit the kind of features that can be used, or alterna-tively make the degree of approximation higher for some fea-tures.
C. Data Association and Pose Hypotheses Update
It is crucial that the data association problem is solved, i.e.,to determine the correspondence between pose candidates andpose hypotheses. For each pair ofpose candidate and pose hypothesis, the innovation and its cor-responding covariance can be defined as
(4)

JENSFELT AND KRISTENSEN: ACTIVE GLOBAL LOCALIZATION FOR A MOBILE ROBOT 751
To be able to determine if a pose candidate matches a pose hy-pothesis, a validation gate is used. A pose candidate,, is suc-cessfully matched against a pose hypothesis,, if the followingcriterion is fulfilled:
(5)
where is the gate threshold.Assuming that we have found a match between pose candi-
date and pose hypothesis , the pose candidate can be seenas a measurement of the robot’s pose. Letdenote the pose ofthe robot, given that is the correct hypothesis. Then ismodeled as being generated by
(6)
The pose hypothesis is updated using the “measurement-updateformula”
(7)
Each unmatched, creative pose candidate,, will initiate anew pose hypothesis , according to
(8)
It is evident that this simple matching scheme in generalwould be likely to produce false matches since no attemptis made to find an “optimal” feature–hypothesis associationacross all features and pose hypotheses. However, the fact thatcreative features and so the corresponding pose hypothesestend to be located relatively far apart significantly reduces therisk of making false associations. Furthermore, to cope withthis problem, should a mismatch occur anyway, track splittingis employed (see Section V).
IV. HYPOTHESISPROBABILITY ESTIMATION
In this section we develop a formulation for probability thata given hypothesis is correct.
If describes the probability of theth hypothesis beingcorrect, the new probability after the receipt of some sensor re-port, , indicating that a new feature of typehas been detected,can—using Bayes’s inversion formula—be written as:
(9)
where can be calculated as:
(10)
where is the number of hypotheses. It is clear that iseffectively a scale factor which ensures that the ’s sum
to 1. This implicitly assumes thatoneof the hypotheses is cor-rect which is true only under a closed world assumption.2 In ourcase, however, this is not generally true, since it cannot be en-sured that at any point in time a correct, modeled feature wasseen and thus a correct pose hypothesis was generated. To over-come this problem, we “close the world” by defining a hypoth-esis , which is the hypothesis accounting for the fact that hy-pothesis might be incorrect. The introduction ofalso has the advantage of generalizing the framework since weat initialization, when no hypotheses have yet been generated,can account for all the probability mass by setting .Therefore, instead of calculating we simply normalize sothat
(11)
The term expresses the probability of receiving thereport, , given that the robot is at the position described by.This is normally estimated using a map of the environment andcan be rewritten as
(12)
where is the probability that a report of typeis gen-erated given that a feature of typeis seen by a sensor and
is the probability that a feature of typecan be seengiven that the robot is at the position described by. In otherwords, is a model of the reliability of the recognizer ex-tracting feature from sensor data and is a “map” ofthe environment. Thus the first term in equation (12) expressesthe probability that a feature is actually detected given that it ex-ists in the world. The second term expresses the probability thata feature is detected although there isno such feature present,i.e., the probability of a false positive, or a “phantom” feature.Again, however, (12) normally assumes a closed world in thesense that it is often assumed that is fully specified bythe map of the world.3 To explicitly distinguish between whatis modeled and what is not we expand as follows:
(13)
where expresses the probability that a modeled fea-ture of type can be seen from the position described byand
the probability that a nonmodeled feature of typecan be seen. Substituting this into equation (12) we get
(14)
From this expression it is seen how accounting for unmodeledfeatures adds an “in-flux” of probability-mass to . Thishas the effect that when a feature is seen where none was pre-dicted according to some hypothesis and the map, this hypoth-esis will not be completely ruled out since the feature couldsimply be unmodeled (or a phantom). The advantage of usingexpression (13) is that it enables the updating to account for the
2For the Markovian methods this corresponds to the assumption that the robotis always inside the area represented by the grid or the topological map.
3SometimesP (rjH ) is directly referred to as “the map.”

752 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 17, NO. 5, OCTOBER 2001
fact that not all feature types may be equally completely mod-eled.
Note that we do not explicitly treat the case where modeledfeatures for some reason no longer exist in the world (either be-cause they were removed or because they are occluded). This isbecause our approach is data driven, i.e., something only hap-pens when a featurehas been seen, and thus nonexisting butmodeled features only influence the framework by causing someextra hypotheses to be generated.
For the calculation of we exploit the fact that wehave a finite number of well-defined hypotheses. If a match be-tween and a candidate, , generated from has been es-tablished, we make the assumption that anduse the fact that the likelihood of being generated from anobservation of given is given as [23]
(15)To get an estimate of we normalize
(16)
When a has not been matched to any generated by weuse which in our system is a constantgivena priory and depending on the type of feature.
We can now formulate an expression for , i.e., theprobability that none of the hypotheses are correct.Since a correct hypothesis is generated as soon as a modeled,creative feature is detected, the probability that no correcthypothesis exists is the probability that only nonmodeled andphantom features have so far been detected, thus
if
if(17)
where is the number of creative features detected. Theproblem with the sum in this equation is that it is extremelydifficult to assess the relevant probabilities, especially for theterm with since the hypothesis is not Gaussian. In theimplementation, we have therefore omitted the conditioning on
and simply used some conservative constants as estimatesfor and .
The decrease in upon the receipt of the thcreative feature, , is exactlythe amount of probability mass, the hypotheses generated on thebasis of the th feature carry. When has decreasedbelow some limit, , no new hypotheses are spawned.
Furthermore, in order to keep the number of hypotheses low,we delete hypotheses for which [and return theprobability mass to ]. In an ideal case, this mayeventually lead to the situation where only one hypothesis existsthus automatically changing the approach from localization topure pose tracking.
V. TRACK SPLITTING
Each time a pose candidate is used to update a pose hypoth-esis, there is a risk of making an association error. This riskgrows with the degree of uncertainty in hypothesis and candi-date. In order not to loose the true pose hypothesis by updatingit incorrectly, each hypothesis is split in two identical copiesbefore the update is done. Each hypothesis receives half of theprobability mass of the original one. The updating, accordingto equation (7), is performed only on the original hypothesis.This procedure is in the literature of target tracking termed tracksplitting [19], [20]. To keep the number of hypotheses low, wemerge hypotheses if they have not moved significantly awayfrom each other (in a Mahalanobis distance sense) after havingbeen split apart. This is identical to testing whether a pose candi-date and a pose hypothesis match [equation (5)]. When merging,the s are simply added and the position of the updatedcopy is used.
VI. OVERALL ALGORITHM
The overall algorithm for the update of the hypotheses, in-cluding the probabilistic update of the s, can be formu-lated as follows.
if
else if
where is the number of new hypotheses generated from a de-tected creative feature.
VII. GENERATION OFMOVEMENT COMMANDS
As previously established it is important that the robot hasan active exploration strategy since it is doubtful that it may beable to resolve ambiguities and gather information efficientlyenough to compensate for odometry drift by mere coincidence.
We have implemented a simple strategy based on the fol-lowing heuristics.
• Moving on the edges of the topological graph makes itlikely that the robot will move on a path that is free fromobstacles.
• Avoid going to the same position twice as it is unlikely toprovide any new information.
• Try to go to a place where a maximum of new features canbe seen.
At startup, when no hypotheses exist, we use a simple ex-ploration strategy to move the robot. When at least one pose hy-

JENSFELT AND KRISTENSEN: ACTIVE GLOBAL LOCALIZATION FOR A MOBILE ROBOT 753
pothesis has been generated, we choose the one with the highest(in case of a draw we simply select the one that happens
to be first in the list) and search the topological graph from thecurrent location of this hypothesis to find the one of the neigh-boring nodes not previously visited and providing the largestnumber of features. This node is then selected as the next nodeto go to.
When the robot fails to move to the next selected node thiscorresponds to one of Kuipers’ rehearsal procedures failing, in-dicating that the robot is not where it assumes to be. Accord-ingly, we scale the probability of the currently best hypothesis,on the basis of which the move was planned, with a factorwhich is the probability that a move fails although the currenthypothesis represents the true pose of the robot.
It is clear that this greedy strategy is not optimal and one ofthe next steps will be to improve this with either POMDP styleplanning or along the lines described in [12] where the actionsare selected so as to minimize the expected entropy after movingand sensing. An alternative strategy is to exploit the fact that wehave a well-defined set of hypotheses and then select the ac-tion that the best discriminates the two most likely hypotheses.While being much simpler and computationally efficient, newresearch indicates that this may lead to equally good results [25].
VIII. E XPERIMENTAL RESULTS
The framework developed in this work has been tested ontwo mobile robots in two different environments; at Daimler-Chrysler Research and Technology, Berlin, Germany, and atthe Centre for Autonomous Systems at the Royal Institute ofTechnology, Stockholm, Sweden. We performed 20 runs ineach place where the robot was positioned at starting pointsthroughout the environment. The starting points were notchosen at random but so as to investigate the strengths andweaknesses of the localization method.
The constants, and where in both places chosen to 0.05and 0.001, respectively. The probabilities of detecting resp. notdetecting a feature were found by making experiments with therecognizers. Therefore these values were not identical at Daim-lerChrysler and at the Centre for Autonomous Systems. How-ever, at both places the experiments performed to determine theappropriate values were very simple which is an indication ofthe fact that this method (similar to many other probabilistic al-gorithms) is quite insensitive toward small parameter variations.
A. Features
The features used in the experiments were the following:1) Door Features: A door specifies all three degrees of
freedom for the robot, that is it gives full pose information.Fig. 2 illustrates the idea behind the calculation of a door basedpose candidate.
2) Line Features:Contrary to doors, a line only constrainstwo of the degrees of freedom for the robot. As Fig. 3 shows,the pose of the robot is given to be at a certain distance fromthe detected line and with a certain orientation. The last degreeof freedom has a large uncertainty associated with it. A featuremap match is deemed possible if the length,, of the detected
Fig. 2. Creating a pose candidate from a door feature.
Fig. 3. Creating a pose candidate from a line feature is assumed possible if themap line is longer than the detected line feature (L � l).
Fig. 4. Creating two pose candidates from a point pair feature.
feature is shorter than or equal to the length,, of a map fea-ture (i.e., ). The larger the difference in length ( ),the larger the uncertainty along the line. The pose candidate isassumed to correspond to a match in the middle of the map line.Alternatively, for long lines it may make sense to generate sev-eral hypotheses along the line. This has not been done in thiswork, though.
3) Point Pair Features:Single point features on their owncannot be used, pairs of points, though, give two possibleposes only (see Fig. 4). Even though the true uncertainty is notGaussian, we make this simplifying assumption. The point pairfeatures were not used in the experiments at DaimlerChrysler.

754 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 17, NO. 5, OCTOBER 2001
(a)
(b)
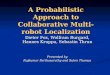
Fig. 5. (a) The mobile platform used for the experiments. The robot consists of a re-fitted LabMate base equipped with a 7-DOF Amtec manipulator and a SickLMS laser scanner plus a set of color CCD cameras mounted on a pan/tilt unit. The robot has two on-board P200 single board computers and radio Ethernetproviding a facility for sending status information to a stationary workstation.(b) Part of the world model used for localization. The thick lines and the circles theyare connecting is the basic topological graph. The thin lines are the walls, the black bars are the doors, and the small circular robot icons are the hypotheses afterdetecting a door feature. Note that all hypotheses have the same relative pose with respect to a modeled door feature.
B. Experiments at DaimlerChrysler Research and Technology(DC)
The mobile robot, Clever (see Fig. 5), used for the experi-ments at DC is using a Sick laser scanner as sensor. The fea-tures used were doors and line segments, being creative and sup-portive features, respectively.
The topological world model contained 30 doors, 139 linesegments (generally corresponding to walls), and 33 nodes. The
model was taught in simulation, i.e., by leading the robot aroundin a simulated world based on a coarse CAD model of our of-fice environment. This kind of model generation has the advan-tage that we can teach large models without having problemswith odometry error and corresponding model inconsistencies.However, using CAD data also means that the model is inher-ently uncertain and incomplete since the real building does notcorrespond exactly to the blueprints and since all the inventoryis not modeled. In Fig. 5 a part of a model including pose hy-

JENSFELT AND KRISTENSEN: ACTIVE GLOBAL LOCALIZATION FOR A MOBILE ROBOT 755
Fig. 6. World model used for the experiments at DC. Grid size is 1 meter. The trajectories followed by the correct hypothesis are plotted (the platform pose duringthe experiments was unknown). Some trajectories have been omitted to keep the plot intelligible. The start and end points have been labeled with the experimentnumber followed by an “S” and an “E,” respectively.
potheses is shown. The entire model used for the experiments isshown in Fig. 6.
Typical data for a global localization attempt is shown inTable I. The data from all of the 20 experiments are listedin Table II. An experiment is ended when the probability ofthe strongest hypothesis exceeds 0.8 or when the explorationstrategy is unable to find any creative features so that nohypotheses are created (failure). A successful run is definedas one where the estimated position, i.e., the centre of theGaussian hypothesis, is so close to the true position that thenormal pose tracking algorithm of the robot can take over.We set that limit to 50 cm and 10 deg, but it is estimated
that the pose in all successful runs was within20 cm and5 deg. From Table II it is seen that the robot successfully
localized in 90% of the trials. On average, the robot used2 min and traveled 17.5 m to perform the localization. Thelonger and more time consuming runs were typically thosewhere the robot was started somewhere in the semi-circularhallway (or one of the adjacent offices). This is due to thehighly uniform structure of this hallway and the difficultiesinvolved with extracting reliable (straight) line segments. Ithowever turned out that the robot would correctly localizeitself as soon as it made it to the end of the hallway wherethe environment is no longer uniform.

756 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 17, NO. 5, OCTOBER 2001
TABLE ITYPICAL DATA FOR A LOCALIZATION ATTEMPT. THE DEVELOPMENT ISILLUSTRATED WITH “SNAPSHOTS” WHICH SHOW THE SYSTEM STATE AT VARIOUS TIME
INSTANCES. THE ROBOT POSE IS THEODOMETRY RELATIVE TO THE STARTING POINT, I.E., IT ILLUSTRATES THEROBOT’S MOVEMENT, NOT THE POSE OF THE
CURRENTBEST ESTIMATE. P (H ) AND P (H ) ARE THE PROBABILITIES OF THEBEST AND SECONDBEST HYPOTHESIS, RESPECTIVELY
TABLE IIRESULTS OF20 EXPERIMENTS AT DC, BERLIN. �x IS THE DISTANCE
BETWEEN START AND END POINT OF THE LOCALIZATION, �D IS THE TOTAL
DISTANCE TRAVELLED. AN F IN THE FIRST COLUMN DENOTESTHAT THE
LOCALIZATION FAILED
In run no. 3, the robot was placed in a cluttered office andthe initial exploration strategy failed to take the robot to a po-sition where a creative feature (i.e., a door) could be seen. Thisshows one weakness of feature based localization which is thatthere might be areas of the environment where there is no infor-mation and where an active strategy thus cannot take over theinformation gathering. It is, however, doubtful whether a non-feature based localization strategy would have been able to takethe rather large, nonholonomic robot out of the office and sub-sequently localize it.
In run no. 13 the robot was put in a hallway (on the upperright in Fig. 6) which has several nonmodeled doors leading torooms with technical equipment where the robot should nevergo. These doors have been left out in the model which was cre-ated for office delivery tasks. In reality, this hallway looks verymuch like the other one running parallel to it, but due to the leftout doors, this is not the case in the model. The effect of this is
that the robot thought that is was located in the hallway with alldoors modeled. What this shows is that although model incom-pleteness has been accounted for in the probabilistic formula-tion, this cannot cope with the case where a number of featureshave systematically been excluded from the model.
C. Experiments at the Centre for Autonomous Systems (CAS)
At CAS the robot Asterix, a Nomad200, was used to carry outthe 20 experiments. Asterix is also equipped with a Sick laserscanner which is mainly used for feature extraction (lines anddoors). A ring of sonar sensors provides information for localnavigation as well as extraction of features (point landmarks).
Fig. 7 shows the world model that covers 900 mand con-sists of 136 lines, 108 doors, and 738 point landmarks. Thepoint landmarks have been combined in pairs to give a totalof 9578 point landmark pairs (see Section VIII-A-3). It shouldbe pointed out that a physical door is represented by one doorfrom each direction it can be observed. The 108 doors in theworld model correspond to approximately physical 70 doors(the difference corresponds to the number of doors leading tounmapped area). As can be seen from Fig. 7 each room is mod-eled as a rectangle, even though many of the rooms in reality arehighly nonrectangular. The rectangles and the positions of thedoors have been measured by hand. The sonar point landmarkson the other hand were collected by driving the robot throughthe environment with a joystick.
The world map was not, like the one at DC, built around agraph with nodes and arcs. It does however contain a set of goal-points which the robot can be directed to during missions. Asimple algorithm was therefore designed to join nearby goal-points with arcs to generate a graph. Information about whatfeatures can be seen from where was approximated using thedistance to the features and the angle at which it was observed(doors).
Table III summarizes the results from the experiments atCAS. The robot localized successfully in 95% of the runs.Localization at CAS took on average 4.5 min under whichthe robot on average traveled 19 m. As we can see there is asignificant difference in the time it took to localize in the twoenvironments, which can be explained by a higher density offeatures (mainly doors) at DC and a faster moving robot. InFig. 7 the trajectories that the robot followed during explorationare shown.

JENSFELT AND KRISTENSEN: ACTIVE GLOBAL LOCALIZATION FOR A MOBILE ROBOT 757
Fig. 7. The world model used for the experiments at CAS. The two disjoint parts belong to two different floors, connected through stairs and two elevators. Themiddle part is the upper floor. Three types of features can be seen in the figure, lines, doors and sonar based point features. Each room in the map is modeledas a rectangle, capturing only the large scale structure of the environment. These rectangles result in four lines per room. Doors are marked as thick lines. Pointlandmarks extracted from sonar sensor data can be seen as the dots scattered throughout the building, mostly along the walls. The points are combined to formpairs (not shown). The true trajectories of the robot are plotted in the figure. Some trajectories have been omitted to keep the plot intelligible. Thestart and endpoints have been labeled with the experiment number followed by an “S” and an “E,” respectively.
In run no. 4 the robot was placed in a small office on the lowerfloor (see Fig. 7). This office is very cluttered, leaving the robotvery limited room to maneuver, thus making the initial explo-ration very slow. To be able to disambiguate the office from theoffice next to it, the robot must reach the corridor, which in thisexperiment took 330 seconds.
In run no. 10 the experiment was performed in the room lyingon its own on the upper region on the lower floor. This roomis identical in size to the room a bit further down on the map,where the robot reported being. The true hypothesis success-fully matched 0 pairs out of 20, 6 lines out of 14 and 2 doors outof 3. The winning, false, hypothesis matched 3 out of 20 pairs,
12 out of 14 lines and 1 out of 3 doors. The reason for the badmatching result for the true hypothesis is that this room has beencompletely restructured since the map was constructed. The fur-niture has been rearranged completely which effects the pointlandmark pairs and a wall that was previously covered with cup-boards have now been uncovered, resulting in one of the sides inthe rectangular line model not matching anymore. This is sim-ilar to what happened in run no. 13 at DC.
In run no. 15 the robot started on the lower end in themap on the upper floor and travelled upwards, not being ableto detect any of the (at the time) closed doors on the lefthand side of the corridor. It was not until the robot went

758 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 17, NO. 5, OCTOBER 2001
TABLE IIIRESULTSFROM EXPERIMENTS ATCAS.�x IS THE DISTANCE BETWEENSTART
AND END POINT OF THE EXPLORATION, WHEREAS�D IS THE TOTAL
DISTANCE TRAVELLED. RUNS 6, 7,AND 20 ILLUSTRATE THAT THE DIFFERENCE
BETWEEN THESETWO DISTANCE MEASURE CAN BEQUITE LARGE. AN F IN
THE FIRST COLUMN DENOTESTHAT THE LOCALIZATION FAILED
into the kitchen in the middle of the corridor that the truepose could be singled out.
In the last experiment, run no. 20, the robot was placed in thealmost feature-less left hand side corridor on the lower floor,only being able to detect one of the doors in this corridor (theothers were closed). Acting according to the greedy explorationstrategy the robot traveled upwards in the map to the region wereno new features were found. It was not until it had been all theway up to the last node that it went back and localized close tothe turn to the other corridor bit. The ten strongest hypotheses allmatched the same number of lines and doors, highlighting thehigh degree of symmetry. However, the point landmark pairseventually singled out the true hypothesis. Had the robot ini-tially travelled down toward the other corridor, it would havebeen able to localize faster and with less ambiguity.
IX. DISCUSSION, CONCLUSION, AND FURTHER WORK
In this paper we have presented a hybrid approach to globallocalization for a mobile robot based on Bayesian probabilitytheory and multiple hypothesis tracking using Kalman filteringof Gaussian pose hypotheses, for short Multi Hypothesis Local-ization (MHL).
The reason for choosing a continuous pose representation inthe form of Gaussians versus the common discretized represen-tations used by other probabilistic approaches were multiple:
• Standard Kalman filtering, already present in our andmany other robot systems, can be used to track and updatethe pose hypotheses.
• There is no trade-off between representation accuracy andsize, i.e., we maintain high accuracy with a very low de-mand for memory.
• Having a few (typically 100) hypotheses it is possibleto on-line generate a sensible (active) movement/sensingstrategy.
• It is computationally efficient since the computational de-mand grows linearly with the number of hypotheses andis independent of the size of the environment.
The drawbacks of using MHL is that it is necessary to solve thedata association problem, i.e., to explicitly match measurementsand hypotheses and that it is not possible to represent an arbi-trary probability distribution of robot pose (with a finite numberof hypotheses). We believe the latter problem to be of purelytheoretical importance and the former was solved using stan-dard techniques from MHT such as track splitting and matchingusing the Mahalanobis distance.
An important issue that has to be addressed when using MHTfor global localization, though, is that of assessing the likelinessof each hypothesis being the correct one. It was chosen to dothis using Bayesian probability theory since this offers an ele-gant framework for evidence fusion and an explicit treatment ofmodel and sensing uncertainty.
The drawback of using hybrid approaches is normally thattwo or more techniques have to be implemented and applied inparallel.However, the Kalmanrepresentationofpose hypothesesas Gaussians directly gives a solution to one of the traditionallyhard problems in the Markov/Bayesian approaches, namelyto estimate the probability of a measurement given somepose hypothesis [equation (11)]. So apart from using theframeworks we find to be the most suitable for hypothesisupdate and assessment, respectively, we have in addition gaineda synergistic effect between them. This clearly eases theformulation and implementation of the latter, which, as afurther benefit resulting from the fact that only a few posehypotheses need to be treated, can be implemented very easilywithout the optimization “tricks” otherwise necessary for thegrid based approaches.
A comparison between MHL and the recent MCL technique[15], [26] is also warranted. MCL is easier to implement, butMHL provides a more intuitive representation with a smallnumber of pose hypotheses. It is not as easy to employ activeexploration strategies for MCL as it is for MHL. MCL has theadvantage of being able to incorporate all kinds of data, whereasMHL requires that a Gaussian approximation is possible. MHLis better at taking advantage of strong features. In the initial phaseMCLmustexplicitlymodel theglobaluncertaintybydistributingsamples throughout the environment thereby spending massiveamount of computations, whereas the zero-hypothesis of MHLtakes care of this effortlessly.
The MHL method was implemented and tested on two realmobile robots and was found to work according to the expec-tations. When the localization failed it was due to the simpleexploration strategy not being able to take the robot to a pointwhere a creative feature could be seen or due to the fact thatthe model in terms of its features looked significantly differentthan the real world. It is however important to point out that thefeature based approach is very robust toward “random” changes

JENSFELT AND KRISTENSEN: ACTIVE GLOBAL LOCALIZATION FOR A MOBILE ROBOT 759
which is exemplified by the fact that no furniture whatsoeverwas present in the model used for the DC experiments and thatthe rooms in the CAS model were approximated with rectan-gles.
On the basis of these experiments it is however not possibleto say much about the lower limit for the number of (modeled)features that have to be present in the environment, and howdensely these have to be placed. This will in general depend onhow symmetric the environment is and on the quality of the plat-form’s odometry. What matters is that the robot does not haveto travel so far between recognizing new features that the uncer-tainty on the pose hypotheses makes them all good candidatesfor a match. In a sparsely but uniformly populated environmentthis may not be a problem since the pose hypotheses will also befar apart, but if there are distant “clusters” of features this mightlead to erroneous results.
The MHT and the Bayesian evidence fusion has been foundto work flawlessly, using very limited computational resources.We believe that it is important to have an exploration strategysince moving randomly is not likely to lead to a successful local-ization due to the odometry drift of the platform. Not being thefocus of this work we implemented a quite simple, greedy-typeexploration strategy which however turned out to be sufficientfor the purpose. The important point here is that due to thefact that we have a limited number of well-defined hypotheses,many methods proposed in the literature become computation-ally tractable and thus easy to employ.
The feature based approach used in this work was partly mo-tivated by the fact that our navigation systems are based on sym-bolic models. We, however, do not think that the MHL method isrestricted to systems using such high level models. Using a gridbased world model it should also be possible to extract pose can-didates from laser scans or sonar readings, although it is obviousthat the formulation of model uncertainty has to be modified.
ACKNOWLEDGMENT
The authors would like to thank the reviewers for their con-structive comments.
REFERENCES
[1] J. Borenstein, B. Everett, and L. Feng,Navigating Mobile Robots: Sen-sors and Techniques. Wellesley, MA: A. K. Peters, Ltd., 1995.
[2] B. J. Kuipers and Y.-T. Byun, “A robot exploration and mapping strategybased on a semantic hierarchy of spatial representations,”Rob. Autonom.Syst., vol. 8, pp. 47–63, 1991.
[3] S. Kristensen, V. Hansen, K. Kondak, and S. Horstmann, “A modulararchitecture for a flexible autonomous service robot,” inProc. Sixth Int.Symp. on Intelligent Robotic Systems 98, Edinburgh, UK, July 1998, pp.93–100.
[4] J. J. Leonard and H. F. Durrant-Whyte, “Mobile robot localization bytracking geometric beacons,”IEEE Trans. Robot. Automat., vol. 7, pp.376–382, June 1991.
[5] A. Stopp and L. Küttner, “A unified approach for fast recognition,learning and interpretation of the environment by an autonomousmobile robot,” inProc. Perspective, Gaithersburg, MD, 1997.
[6] Y. Lamdan and H. Wolfson, “Geometric hashing: A general and effi-cient model-based recognition scheme,” inProc. 1988 IEEE Int. Conf.on Robotics and Automation (ICRA’88). Philadelphia, PA: IEEE, Apr.1988, pp. 1407–1413.
[7] J. L. Crowley, F. Wallner, and B. Schiele, “Position estimation usingprincipal components of range data,” inProc. 1998 IEEE Int. Conf.on Robotics and Automation. Leuven, Belgium: IEEE, May 1998, pp.3121–3128.
[8] S. Koenig and R. G. Simmons, “Xavier: A robot navigation architecturebased on partially observable markov decision process models,” inArtif.Intell. Mobile Robots, D. Kortenkamp, R. P. Bonasso, and R. Murphy,Eds: AAAI Press/The MIT Press, 1998, pp. 91–122.
[9] R. Simmons and S. Koenig, “Probabilistic robot navigation in partiallyobservable environments,” inProc. 14th IJCAI, Montreal, Canada, Au-gust 1995, pp. 1080–1087.
[10] L. P. Kaelbling, M. L. Littman, and A. R. Cassandra, “Partially observ-able markov decision processes for artificial intelligence,” inReasoningwith Uncertainty in Robotics. ser. Lecture Notes in Artificial Intelligence1093, L. Dorst, M. van Lambalgen, and F. Voorbraak, Eds. Berlin:Springer, 1996, pp. 146–162.
[11] S. Thrun, A. Bücken, W. Burgard, D. Fox, T. Fröhlinghaus, D. Hennig,T. Hofmann, M. Krell, and T. Schmidt, “Map learning and high-speednavigation in RHINO,” inArtificial Intelligence and Mobile Robots, D.Kortenkamp, R. P. Bonasso, and R. Murphy, Eds: AAAI Press/The MITPress, 1998, pp. 21–52.
[12] D. Fox, W. Burgard, and S. Thrun, “Active markov localization for mo-bile robots,”Robots Autonomous Syst., vol. 25, no. 3–4, pp. 195–207,1999.
[13] W. Burgard, D. Fox, and S. Thrun, “Active mobile robot localization byentropy minimization,” inProc. 2nd Euromicro Workshop on AdvancedMobile Robots: IEEE/CS, 1997.
[14] S. Kristensen, “Sensor planning with Bayesian decision theory,” inReasoning with Uncertainty in Robotics. ser. Lecture Notes in ArtificialIntelligence 1093, L. Dorst, M. van Lambalgen, and F. Voorbraak,Eds. Berlin, Germany: Springer, 1996, pp. 353–367.
[15] D. Fox, W. Burgard, F. Dellaert, and S. Thrun, “Monte carlo local-ization—Efficient position estimation for mobile robots,” inProc.AAAI’99, 1999.
[16] S. Thrun, W. Burgard, and D. Fox, “A real-time algorithm for mobilerobot mapping with applications to multi-robot and 3D mapping,” inProc. IEEE Int. Conf. on Robotics and Automation. San Francisco,CA: IEEE, Apr. 2000, pp. 321–328.
[17] J.-S. Gutmann, W. Burgard, D. Fox, and K. Konolige, “An experi-mental comparison of localization methods,” inProc. InternationalConference on Intelligent Robots and Systems (IROS’98), vol. 2,1998, pp. 736–743.
[18] P. Jensfelt and S. Kristensen, “Active global localization for a mobilerobot using multiple hypothesis tracking,” inProc. IJCAI-99 Workshopon Reasoning with Uncertainty in Robot Navigation, Stockholm,Sweden, Aug. 1999, pp. 13–22.
[19] Y. Bar-Shalom and X.-R. Li,Estimation and Tracking: Principles, Tech-niques, and Software. Norwood, MA: Artech House, 1993.
[20] , Multitarget-Multisensor Tracking: Principles and Techniques:YBS, 1995.
[21] J. Reuter, “Mobile robot self-localization using PDAB,” inProc. Int.Conf. on Robotics and Automation. San Francisco, CA: IEEE, April2000, vol. 4, pp. 3512–3518.
[22] S. I. Roumeliotis and G. A. Bekey, “Bayesian estimation and Kalmanfiltering: A unified framework for mobile robot localization,” inProc.Int. Conf. on Robotics and Automation. San Francisco, CA: IEEE, Apr.2000, vol. 3, pp. 2985–2992.
[23] U. Larsson, J. Forsberg, and Å Wernersson, “On robot navigation usingidentical landmarks: Integrating measurements from a time-of-flightlaser,” in Proc. 1994 IEEE Int. Conf. on Multisensor Fusion andIntegration for Intelligent SystemsLas Vegas, NV, Oct. 1994, pp.17–26.
[24] S. Thrun, “Probabilistic algorithms in robotics,”AI Mag., vol. 21, no. 4,pp. 93–109, 2000.
[25] T. D. Larsen, N. A. Andersen, and O. Ravn, “Sensor management foridentity fusion on a mobile robot,” inProc. Fifth Int. Conf. on Control,Automation, Robotics and Vision (ICARCV’98), 1998.
[26] P. Jensfelt, O. Wijk, D. Austin, and M. Andersson, “Experiments onaugmenting condensation for mobile robot localization,” inProc. Int.Conf. on Robotics and Automation (ICRA’00), vol. 3, San Francisco,CA, May 2000, pp. 2518–2524.

760 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 17, NO. 5, OCTOBER 2001
Patric Jensfelt received the M.Sc. degree in 1996from the School of Engineering Physics at the RoyalInstitute of Technology, Stockholm, Sweden, and thePh.D. degree on the topic of mobile robot localiza-tion from the Centre for Autonomous Systems in June2001, where he is currently a postdoctoral researcher.
His research interests also include outdoor roboticsand large scale and long term operation of roboticsystems.
Steen Kristensenreceived the M.Sc.E.E. degree andthe Ph.D. degree in 1992 and 1996, respectively, fromAalborg University, Denmark, where he worked withdecision theoretic sensor planning for mobile robots.
Since 1996 he is working at DaimlerChryslerResearch and Technology, Berlin, Germany, wherehe is doing research in mobile robots for service,space and factory applications. His research interestsinclude sensing and planning for mobile robots aswell as system architectures for such systems.