Embed Size (px)
Citation preview
Acoplamiento adaptable deimpedancias basado en
conocimientopor
José Erasmo Arroyo Huerta
Tesis sometida como requisito parcialpara obtener el grado de
DOCTOR EN CIENCIAS EN LAESPECIALIDAD DE ELECTRÓNICA
en el
Instituto Nacional de Astrofísica, Óptica yElectrónica
Junio 2012Tonantzintla, Puebla
Supervisada por:
Dr. José Alejandro Díaz MéndezDr. Juan Manuel Ramírez Cortés
c©INAOE 2012El autor otorga al INAOE el permiso de reproducir
y distribuir copias en su totalidad o enpartes de esta tesis

Resumen
Uno de los problemas más importantes en sistemas de comunicación inalámbrica es la
integridad de la señal. Conforme la velocidad de operación de los sistemas de comunicación
se incrementa, algunos efectos como la reflexión de la señal, el cual puede producir pérdidas
importantes, empiezan a ser cruciales.
La reflexión se debe al desacoplo de impedancias que existe entre la impedancia parásita
de la fuente (emisor) y la impedancia de la carga (receptor). Debido a esto, en el canal de co-
municación existen señales reflejadas viajando en ambos sentidos: de la fuente a la carga y de
la carga a la fuente. Desafortunadamente, la formulación de un modelo matemático completo
para el desacoplo de impedancias es un proceso muy complejo, debido a que los paráme-
tros involucrados dependen de muchos factores como variaciones de proceso en la fabricación
de circuitos integrados (CI), longitud de las líneas de interconexión, temperatura, velocidad
de operación, etc. Es por esto que el uso de algoritmos basados en conocimiento represen-
ta una alternativa interesante a ser explorada cuando se busca una solución al problema de
acoplamiento de impedancias utilizando esquemas adaptables.
Las principales contribuciones de esta investigación son: un sistema de acoplamiento adap-
table de impedancias complejas para sistemas de comunicación inalámbrica en el rango de
frecuencias de 2.4GHz, la propuesta de un controlador difuso novedoso con un consumo de
área y potencia optimizado.
I


Abstract
One of the most important issues on communication systems is signal integrity. As the op-
eration speed of the communication systems increases some effects like reflection and crosstalk,
which may produce important signal losses, become crucial . Reflection is due to impedance
mismatch between the source impedance and the load impedance. In this case, signal reflec-
tions traveling through the line are present in either source to load or load to source directions.
Formulation of a complete mathematical model for impedance mismatch is a very complex
process, since the parameters involved depend on many factors like process variations, length
variations of the interconnection lines, temperature, etc. In this sense, knowledge based algo-
rithms represent interesting alternatives which can be explored when looking for solutions to
the impedance mismatch problem using adaptive schemes..
The main contributions of this work are: an adaptive impedance matching system for wire-
less communication systems. A novel fuzzy controller with small area and power consumption
III

Agradecimientos
A mis padres, Lourdes y Rubén, por su cariño y apoyo incondicional a través del
largo camino que fué terminar este proyecto. A todos mis hermanos.
A mis asesores Dr. José Alejandro Díaz Méndez y Dr. Juan Manuel Ramírez Cortés,
por su apoyo y guía en el desarrollo de esta tesis.
Al Dr. Mario Edgardo Magaña por haberse sumado a este proyecto, enriqueciéndo-
lo con sus aportaciones.
A los Dres. Juan Carlos Sánchez García, Román Salinas Cruz, María Teresa Sanz
Pascual, Ignacio Enrique Saldivar Huerta y Guillermo Espinosa Flores-Verdad por sus
valiosos comentarios para la finalización de esta tesis.
A Toño, que me acompañó en cada paso y me alentó a siempre seguir adelante.
A mis amigos por su estimada compañía y por haberme brindado su amistad.
Al pueblo de México, que mediante el CONACYT se me otorgó la beca número
201778, con la cual me fue posible estudiar este posgrado.
Al INAOE, por alimentarme de conocimientos, los cuales me servirán para toda la
V

vida; cuidar de mi bienestar, mediante el otorgamiento de los múltiples apoyos esco-
lares; proveer la infraestructura, las facilidades y el amable trato del personal que aquí
labora. Agradezco de todo corazón a mi instituto por ceñirme en sus cálidas alas del
saber.

A mis padres, Lourdes y Rubén
Índice general
Índice general VIII
1 Introducción 11.1. Desacoplo de impedancias en sistemas de comunicación . . . . . . . . 1
Interferencia entre líneas . . . . . . . . . . . . . . . . . . . . . . . . . 3Reflexión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2. Los algoritmos basados en conocimiento . . . . . . . . . . . . . . . . . 9Redes neuronales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Algoritmos genéticos . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Lógica difusa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.3. Estado del arte y trabajos previos . . . . . . . . . . . . . . . . . . . . . 161.4. Objetivos de la tesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Objetivo general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Objetivos particulares . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.5. Organización de la tesis . . . . . . . . . . . . . . . . . . . . . . . . . . 181.6. Discusión del capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2 Sistema de acoplamiento de impedancias 212.1. Justificación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.2. Propuestas de solución . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Controlador difuso . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22Interpolador signo-signo . . . . . . . . . . . . . . . . . . . . . . . . . 26Interpolador Sigmoidal . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.3. Sistema Implementado . . . . . . . . . . . . . . . . . . . . . . . . . . 33El controlador difuso . . . . . . . . . . . . . . . . . . . . . . . . . . . 35La red de acoplamiento . . . . . . . . . . . . . . . . . . . . . . . . . . 43
2.4. Discusión del capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3 Estabilidad 493.1. Estabilidad en los sistemas de control difuso . . . . . . . . . . . . . . . 49
Representación matemática de controladores difusos . . . . . . . . . . 49Linear Matrix Inequality (LMI) . . . . . . . . . . . . . . . . . . . . . . 51
3.2. Estabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
VIII

3.3. Discusión del capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4 Resultados 574.1. Caracterización de los bloques electrónicos . . . . . . . . . . . . . . . 57
Controlador difuso . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57Red de acoplamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . 71Sistema de acoplamiento de impedancias . . . . . . . . . . . . . . . . . 72
4.2. Discusión del capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
5 Conclusiones y trabajo futuro 815.1. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 815.2. Revisión de objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . 825.3. Contribuciones generadas . . . . . . . . . . . . . . . . . . . . . . . . . 835.4. Trabajo futuro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 835.5. Publicaciones derivadas . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Índice de figuras 85
Índice de tablas 88
Referencias 89

Capítulo 1
Introducción
En este capítulo se define el problema del desacoplo de impedancias en sistemas de
comunicacion, se detalla el funcionamiento de los sistemas de control basados en
conocimiento, en particular el control basado en lógica difusa.
1.1. Desacoplo de impedancias en sistemas de
comunicación
En la actualidad, la necesidad de transferir información de un punto a otro ha cre-
cido significativamente. Cada vez se necesitan sistemas de comunicación más rápidos,
confiables y pequeños. Las comunicaciones inalámbricas son un sector con gran cre-
cimiento en la industria de las comunicaciones. En un principio, las comunicaciones
inalámbricas se limitaban a la transmisión analógica de voz y telegrafía, pero en este
punto, tanto los emisores como la mayoría de los receptores no eran portátiles y cada
uno estaba destinado a una aplicación específica (voz, video, telégrafo), conforme la
tecnología fue evolucionando se crearon redes inalámbricas para transmisión de datos
digitales lo cual trajo consigo el surgimiento de un gran número de aplicaciones para
dispositivos portátiles con una gran cantidad de funciones integradas: teléfonos celu-
lares capaces de enviar y recibir datos (texto, multimedia), dispositivos GPS (Global
1
2 CAPÍTULO 1. INTRODUCCIÓN
Positioning System), computadoras portátiles con conexión inalámbrica de banda an-
cha, PDA (Personal Digital Assistant). La tendencia actual en comunicaciones inalám-
bricas es crear dispositivos que contengan todas las funciones digitales integradas: voz,
video y datos. Con la creación de los estándares IEEE 802.11 [fit99a] e IEEE 802.15
[fit99b] fue posible el surgimiento de tecnologías para redes Wi-Fi (Wireless Fidelity)
y Bluetooth respectivamente, ambas trabajando en el rango de frecuencias de 2.4GHz.
A pesar de que dichas tecnologías fueron diseñadas para diferentes aplicaciones, Wi-Fi
para acceso de banda ancha a internet y Bluetooth para transferencia de datos entre
dispositivos cercanos, éstas se ven afectadas por el mismo tipo de problemas:
1. Interferencias entre dispositivos Wi-Fi y Bluetooth.
2. Degradación de la señal por obstáculos entre el emisor y el receptor.
3. Degradación de la señal por desacoplo de impedancias [Mic02].
Un factor decisivo en esta gran integración de funcionalidad dentro de un solo dis-
positivo ha sido la capacidad de escalamiento de las tecnologías de CI’s basadas en
silicio. En tecnologías CMOS (Complementary Metal-Oxide-Semiconductor), este es-
calamiento ha permitido que sea posible crear CI’s con frecuencias de operación cada
vez más elevadas, con mayor cantidad de transistores dentro de la misma área y a un
bajo costo de fabricación. De la misma manera los CI’s son diseñados para que cada
vez consuman menos cantidad de corriente y, por ende, menos potencia, lo cual alarga
la vida de la batería.
Estas características de los sistemas inalámbricos han provocado una explosión en
su demanda, creando un compromiso entre la cantidad de usuarios y la calidad del
servicio. A fin de para satisfacer dicho compromiso, las nuevas tecnologías deberán
ser creadas con técnicas que mejoren su desempeño a nivel tanto físico como lógico.
Esto se logra mediante el uso de algoritmos que disminuyan el error en la transferencia
de de la información y mediante diseños que mejoren las características eléctricas del
sistema. Existen varios fenomenos, casi todos de naturaleza electromagnética, que dan
origen a los errores en la transferencia de datos, los principales son interferencia entre
líneas y reflexión.
1.1. DESACOPLO DE IMPEDANCIAS EN SISTEMAS DE COMUNICACIÓN 3
Interferencia entre líneas
La interferencia entre líneas es el acoplamiento capacitivo e inductivo de señales de
una línea de interconexión a otra [You00] . Conforme se incrementa el desempeño y
la densidad de estas líneas, el problema de interferencia entre líneas también se incre-
menta. A la línea cuya señal interfiere con otra se le conoce generalemente como activa
ó agresora, la línea con la señal afectada por el acoplamiento se denomina pasiva ó
víctima.
La amplitud de la señal generada en la línea pasiva es directamente proporcional
a la ampitud de señal en la línea activa y la distancia que existe entre las dos líneas.
Los principales efectos del crosstalk son que incrementa los niveles de ruido, pudiendo
provocar cambios de estado de la señal indeseados (debido a la modificación de los
umbrales de switcheo) y jitter en los datos [wes91].
Existen tres principales fuentes de crosstalk: acoplamiento capacitivo, acoplamiento
inductivo y acoplamiento de impedancia común. Generalmente el problema de crosstalk
es causado por una combinación de estas tres fuentes. El acoplamiento de impedancia
común ocurre cuando corrientes de dos circuitos diferentes fluyen a través de una so-
la impedancia [Ott98][Pau92]. El acoplamiento inductivo es resultado de la interacción
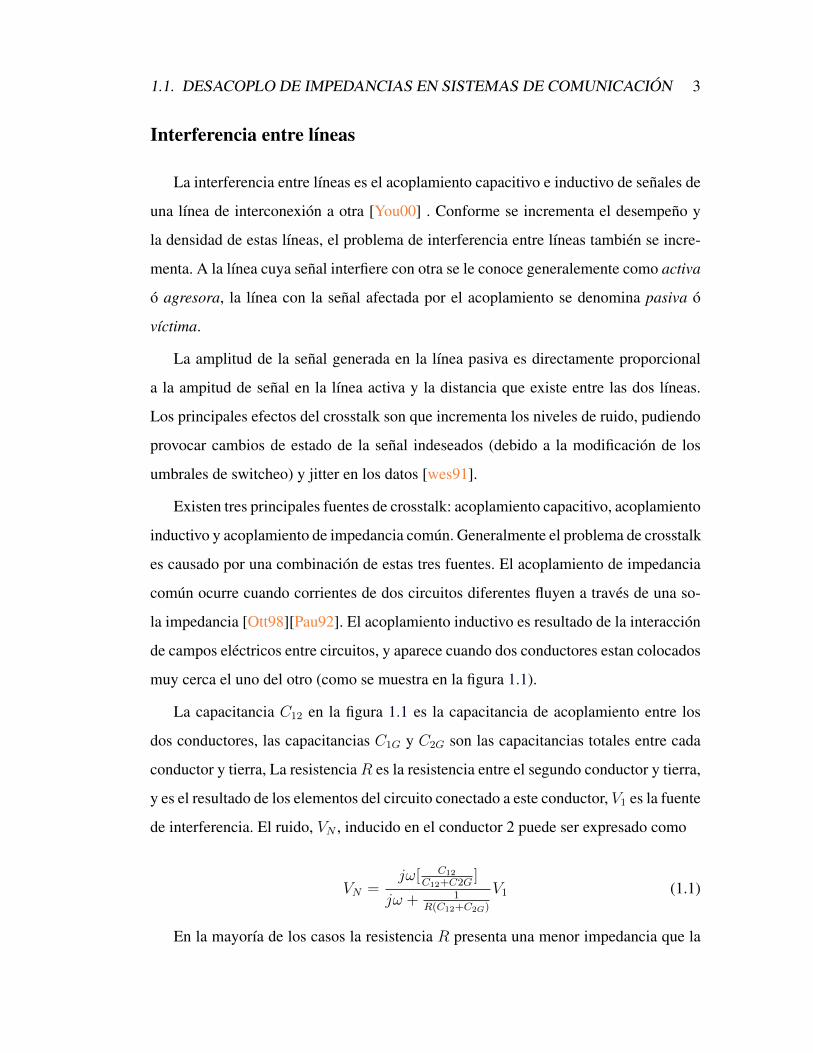
de campos eléctricos entre circuitos, y aparece cuando dos conductores estan colocados
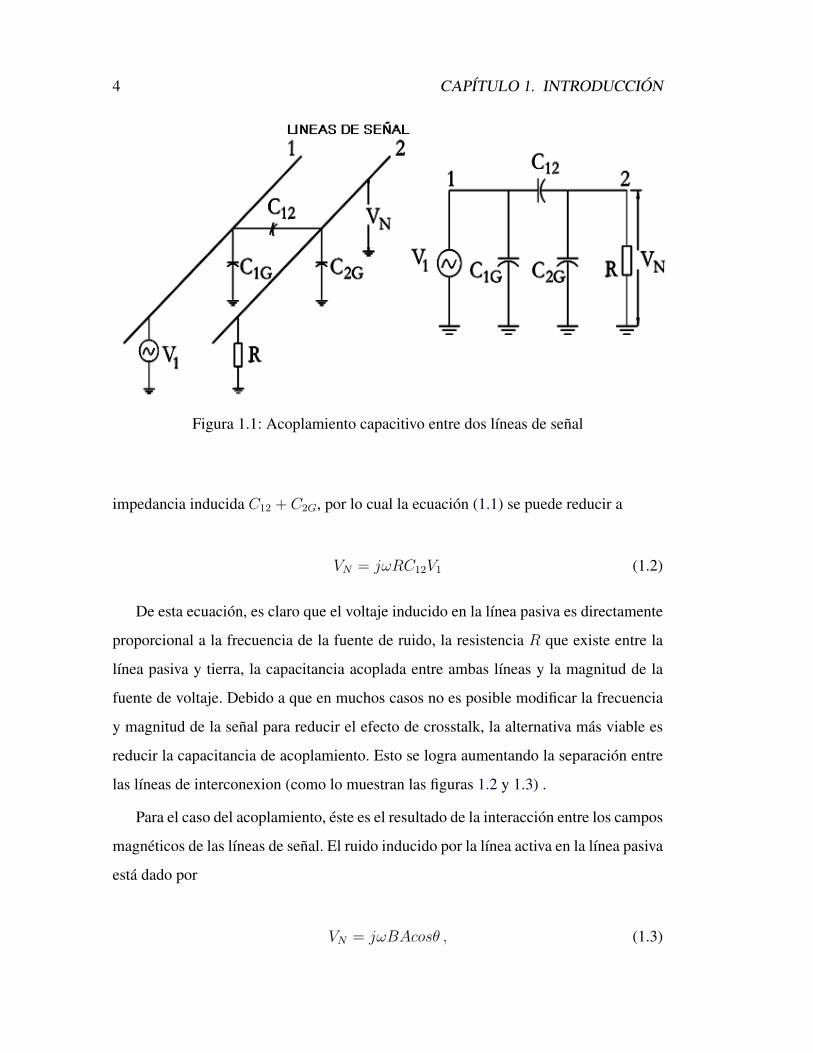
muy cerca el uno del otro (como se muestra en la figura 1.1).
La capacitancia C12 en la figura 1.1 es la capacitancia de acoplamiento entre los
dos conductores, las capacitancias C1G y C2G son las capacitancias totales entre cada
conductor y tierra, La resistenciaR es la resistencia entre el segundo conductor y tierra,
y es el resultado de los elementos del circuito conectado a este conductor, V1 es la fuente
de interferencia. El ruido, VN , inducido en el conductor 2 puede ser expresado como
VN =jω[ C12
C12+C2G]
jω + 1R(C12+C2G)
V1 (1.1)
En la mayoría de los casos la resistencia R presenta una menor impedancia que la
4 CAPÍTULO 1. INTRODUCCIÓN
Figura 1.1: Acoplamiento capacitivo entre dos líneas de señal
impedancia inducida C12 + C2G, por lo cual la ecuación (1.1) se puede reducir a
VN = jωRC12V1 (1.2)
De esta ecuación, es claro que el voltaje inducido en la línea pasiva es directamente
proporcional a la frecuencia de la fuente de ruido, la resistencia R que existe entre la
línea pasiva y tierra, la capacitancia acoplada entre ambas líneas y la magnitud de la
fuente de voltaje. Debido a que en muchos casos no es posible modificar la frecuencia
y magnitud de la señal para reducir el efecto de crosstalk, la alternativa más viable es
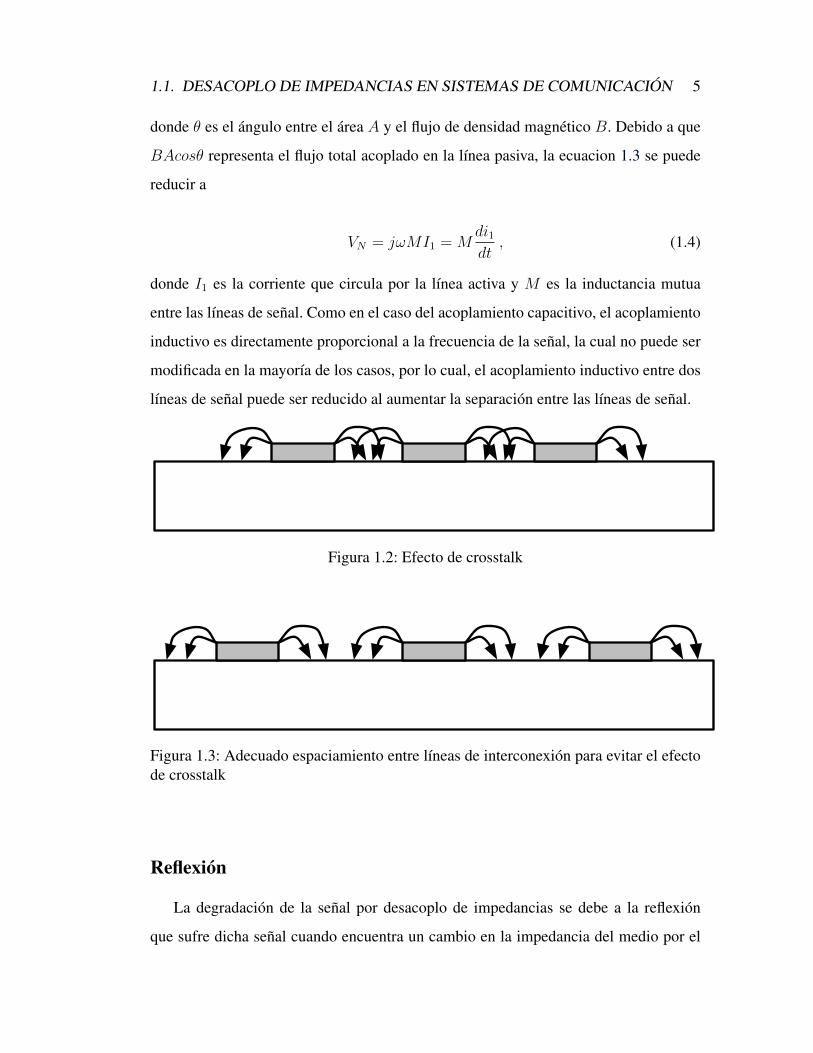
reducir la capacitancia de acoplamiento. Esto se logra aumentando la separación entre
las líneas de interconexion (como lo muestran las figuras 1.2 y 1.3) .
Para el caso del acoplamiento, éste es el resultado de la interacción entre los campos
magnéticos de las líneas de señal. El ruido inducido por la línea activa en la línea pasiva
está dado por
VN = jωBAcosθ , (1.3)
1.1. DESACOPLO DE IMPEDANCIAS EN SISTEMAS DE COMUNICACIÓN 5
donde θ es el ángulo entre el área A y el flujo de densidad magnético B. Debido a que
BAcosθ representa el flujo total acoplado en la línea pasiva, la ecuacion 1.3 se puede
reducir a
VN = jωMI1 = Mdi1dt
, (1.4)
donde I1 es la corriente que circula por la línea activa y M es la inductancia mutua
entre las líneas de señal. Como en el caso del acoplamiento capacitivo, el acoplamiento
inductivo es directamente proporcional a la frecuencia de la señal, la cual no puede ser
modificada en la mayoría de los casos, por lo cual, el acoplamiento inductivo entre dos
líneas de señal puede ser reducido al aumentar la separación entre las líneas de señal.
Figura 1.2: Efecto de crosstalk
Figura 1.3: Adecuado espaciamiento entre líneas de interconexión para evitar el efectode crosstalk
Reflexión
La degradación de la señal por desacoplo de impedancias se debe a la reflexión
que sufre dicha señal cuando encuentra un cambio en la impedancia del medio por el
6 CAPÍTULO 1. INTRODUCCIÓN
que está viajando. Cuando esto ocurre, una parte de la señal que está siendo enviada es
regresada hacia la fuente como consecuencia del cambio en la impedancia del medio.
Las pérdidas de senãl debidas al desacoplo de impedancias son medidas mediante la
estimación del coeficiente de reflexión, dado por:
Γ =ZL − ZOZL + ZO
, (1.5)
donde ZL es la impedancia de la carga y ZO es la impedancia de la fuente. A partir de
la ecuación 1.5, es evidente que el acoplamiento óptimo de impedancias ocurre cuando
ambas impedancias tienen el mismo valor o, en el caso general, cuando la impedancia
de la carga es el complejo conjugado de la impedancia de la fuente.
Desafortunadamente, en un sistema de comunicación inalámbrica, las señales en-
cuentran cambios de impedancia en múltiples ocasiones:
1. El primer desacoplo aparece cuando la señal pasa del dado del CI al empaqueta-
do del mismo. Este desacoplo se debe principalmente a las variaciones de proceso que
ocurren durante la fabricación del CI y provoca que las terminales de conexión presen-
ten una impedancia diferente para la cual fueron diseñados. Existen algunas técnicas de
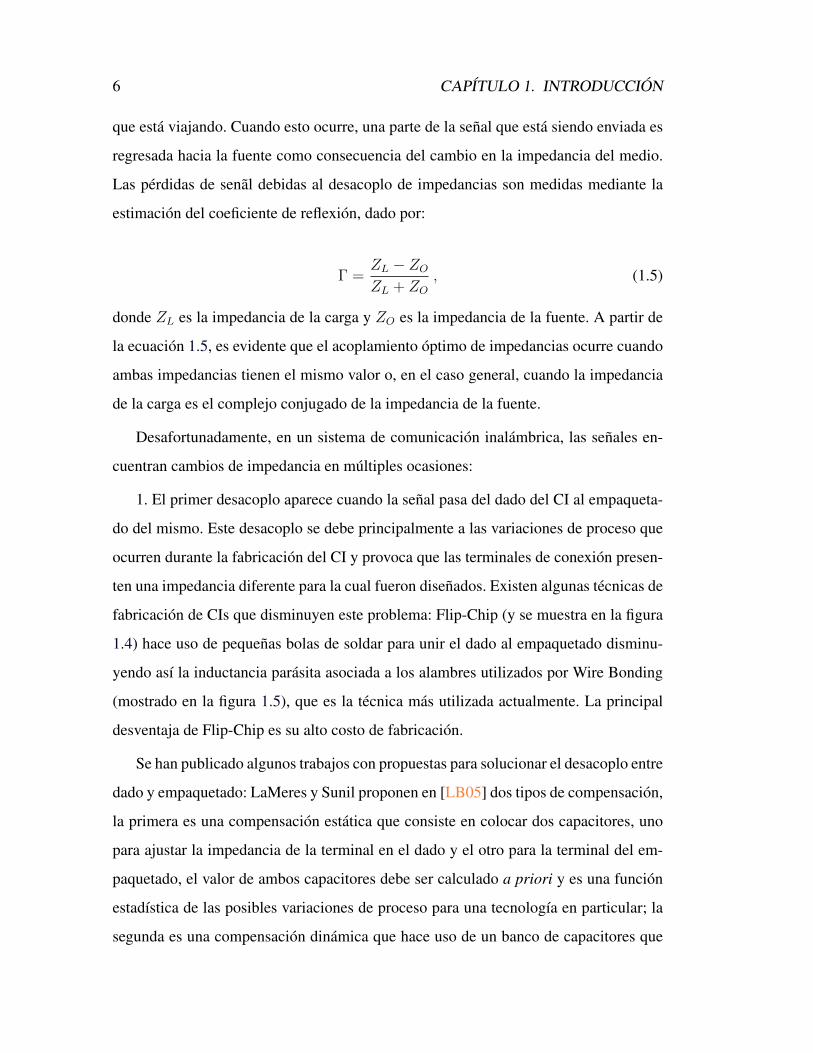
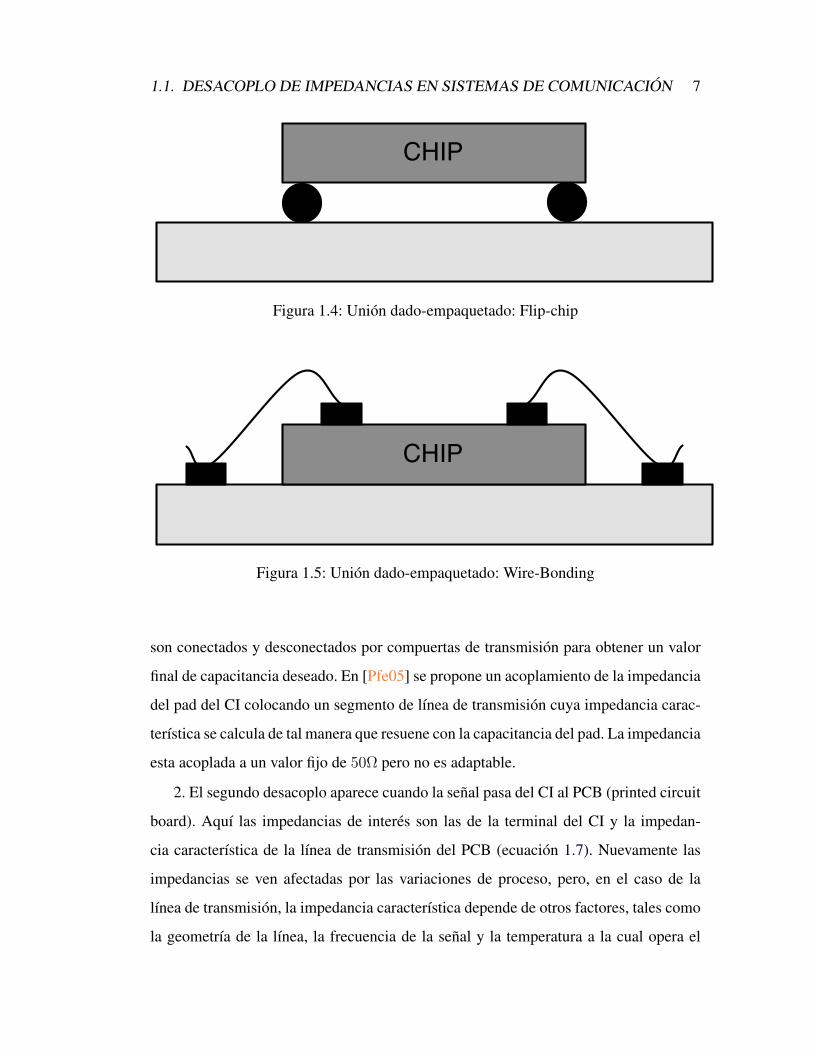
fabricación de CIs que disminuyen este problema: Flip-Chip (y se muestra en la figura
1.4) hace uso de pequeñas bolas de soldar para unir el dado al empaquetado disminu-
yendo así la inductancia parásita asociada a los alambres utilizados por Wire Bonding
(mostrado en la figura 1.5), que es la técnica más utilizada actualmente. La principal
desventaja de Flip-Chip es su alto costo de fabricación.
Se han publicado algunos trabajos con propuestas para solucionar el desacoplo entre
dado y empaquetado: LaMeres y Sunil proponen en [LB05] dos tipos de compensación,
la primera es una compensación estática que consiste en colocar dos capacitores, uno
para ajustar la impedancia de la terminal en el dado y el otro para la terminal del em-
paquetado, el valor de ambos capacitores debe ser calculado a priori y es una función
estadística de las posibles variaciones de proceso para una tecnología en particular; la
segunda es una compensación dinámica que hace uso de un banco de capacitores que
1.1. DESACOPLO DE IMPEDANCIAS EN SISTEMAS DE COMUNICACIÓN 7
CHIP
Figura 1.4: Unión dado-empaquetado: Flip-chip
CHIP
Figura 1.5: Unión dado-empaquetado: Wire-Bonding
son conectados y desconectados por compuertas de transmisión para obtener un valor
final de capacitancia deseado. En [Pfe05] se propone un acoplamiento de la impedancia
del pad del CI colocando un segmento de línea de transmisión cuya impedancia carac-
terística se calcula de tal manera que resuene con la capacitancia del pad. La impedancia
esta acoplada a un valor fijo de 50Ω pero no es adaptable.
2. El segundo desacoplo aparece cuando la señal pasa del CI al PCB (printed circuit
board). Aquí las impedancias de interés son las de la terminal del CI y la impedan-
cia característica de la línea de transmisión del PCB (ecuación 1.7). Nuevamente las
impedancias se ven afectadas por las variaciones de proceso, pero, en el caso de la
línea de transmisión, la impedancia característica depende de otros factores, tales como
la geometría de la línea, la frecuencia de la señal y la temperatura a la cual opera el
8 CAPÍTULO 1. INTRODUCCIÓN
sistema.
Z0 =
√R + jLw
G+ jCw, (1.6)
donde Z0 es la impedancia característica, R es la resistencia de la línea de transmisión,
G es la conductancia del dieléctrico, L y C son la inductancia y capacitancia de la línea
respectivamente. A su vez, la resistencia esta dada por:
R =ρL
A, (1.7)
donde L es la longitud de la línea y A es el área de la sección transversal. Debido al
efecto piel, a medida que la frecuencia aumenta la corriente tiende a fluir solo por la
superficie de la línea disminuyendo el área efectiva sobre la cual viaja la señal, por lo
tanto a altas frecuencias la resistencia de la línea aumenta.
3. Cuando la señal pasa de la línea de transmisión a la antena se presenta un de-
sacoplo más [Kaz11][?]. El desempeño de la antena de un dispositivo móvil se ve afec-
tado por objetos cercanos, incluso por la propia mano o cabeza de la persona que lo
utiliza. Cuando esto ocurre la impedancia de entrada de la antena cambia. En [II04] y
[II05] Ida et. al proponen un sistema de acoplamiento de impedancias con un control
a prueba y error: obtienen una señal de error y ejercen una acción de control, si es-
ta acción hace que el error disminuya vuelven a ejercerla, si por el contrario el error
aumenta ejercen una acción de control en sentido inverso. Bajo este esquema no es
necesaria ninguna formulación matemática complicada para modelar el sistema, sin
embargo el sistema de control quedaría oscilando alrededor de una posible solución,
sin lograr una convergencia.
Por lo anterior, es claro que, con el fin de tener un sistema de comunicación inalám-
brica con la menor pérdida de señal por reflexiones, es necesario lograr un acoplamien-
to de impedancias en cada uno de los puntos donde ocurren cambios significativos de
dicha impedancia. De la misma manera se requiere que el acoplamiento de impedan-
cias se mantenga aun cuando las condiciones ambientales provoquen variaciones en la

1.2. LOS ALGORITMOS BASADOS EN CONOCIMIENTO 9
operación del sistema. Así mismo, debido a que la impedancia en un punto dado es
función de muchas variables (temperatura, frecuencia, interferencias, obstáculos, de-
sacoplamiento), intentar desarrollar un modelo matemático que permita controlar de
forma eficaz dicha impedancia no es viable. Por lo cual es necesario hacer uso de un al-
goritmo que satisfaga estas condiciones. Kazemian et al. reportan en [Kaz06] y [Kaz07]
el uso de controladores difusos en aplicaciones de Bluetooth, pero las soluciones van
orientadas a disminuir errores en la transmisión de la secuencia de bits mas que en el
desempeño de la parte física del sistema.
1.2. Los algoritmos basados en conocimiento
Como puede concluirse de la sección anterior, el problema de desacoplo de impedan-
cias en un sistema de comunicación inalámbrica depende de muchos factores, por lo que
la obtención de un modelo matemático que permita utilizar técnicas de control están-
dar, como PID (Proporcional-integral-derivativo) es poco viable. Existen, sin embargo,
una familia de algoritmos cuya funcionalidad no esta basada en un modelo matemáti-
co exacto de la planta, sino en el conocimiento de un experto, estos algoritmos son
llamados algoritmos basados en conocimiento.
Ejemplo de estos algoritmos son las redes neuronales, la lógica difusa y los algorit-
mos genéticos.
Redes neuronales
Las redes neuronales son sistemas compuestos de un gran número de elementos de
procesamiento altamente interconectados (neuronas) trabajando al mismo tiempo para
la solución de problemas específicos, capaces de manejar las imprecisiones e incer-
tidumbres que aparecen cuando se trata de resolver problemas como: reconocimiento
de patrones, toma de decisiones, etc., ofreciendo soluciones robustas y de fácil im-
plementación. Al igual que el cerebro, una red neuronal se compone de un conjunto
10 CAPÍTULO 1. INTRODUCCIÓN
masivamente paralelo de unidades de proceso muy simples y es en las conexiones entre
estas unidades donde reside la inteligencia de la red. las redes neuronales tienen un gran
número de procesadores virtuales interconectados que de forma simplificada simulan
la funcionalidad de las neuronas biológicas. En esta simulación, la reorganización de
las conexiones sinápticas biológicas se modela mediante un mecanismo de pesos, que
son ajustados durante la fase de aprendizaje. En una red neuronal entrenada, el conjun-
to de los pesos determina el conocimiento de esa red neuronal y tiene la propiedad de
resolver el problema para el cual ha sido entrenada.
Como ya se mencionó anteriormente, una red neuronal se compone de unidades lla-
madas neuronas. Cada neurona recibe una serie de entradas a través de interconexiones
y emite una salida. Esta salida viene dada por tres funciones: 1. Una función de propa-
gación (también conocida como función de excitación), que por lo general consiste en
la suma de cada entrada multiplicada por el peso de su interconexión. Si el peso es
positivo, la conexión se denomina excitatoria; si es negativo, se denomina inhibitoria.
2. Una función de activación, que modifica a la anterior. Puede no existir, siendo en
este caso la salida la misma función de propagación.
3. Una función de transferencia, que se aplica al valor devuelto por la función de
activación. Se utiliza para acotar la salida de la neurona y generalmente viene dada por
la interpretación que se quiera dar a dichas salidas. Algunas de las más utilizadas son la
función sigmoide (para obtener valores en el intervalo [0,1]) y la tangente hiperbólica
(para obtener valores en el intervalo [-1,1]).
Algunas de las características principales de las redes neuronales es que son capaces
de aprender mediante entrenamiento, que tienen alta redundancia debido a su forma de
almacenar información, la cual las hace tolerantes a fallos, son capaces de manejar
señales con ruido sin afectar significativamente su desempeño y son capaces de operar
en sistemas de tiempo real.
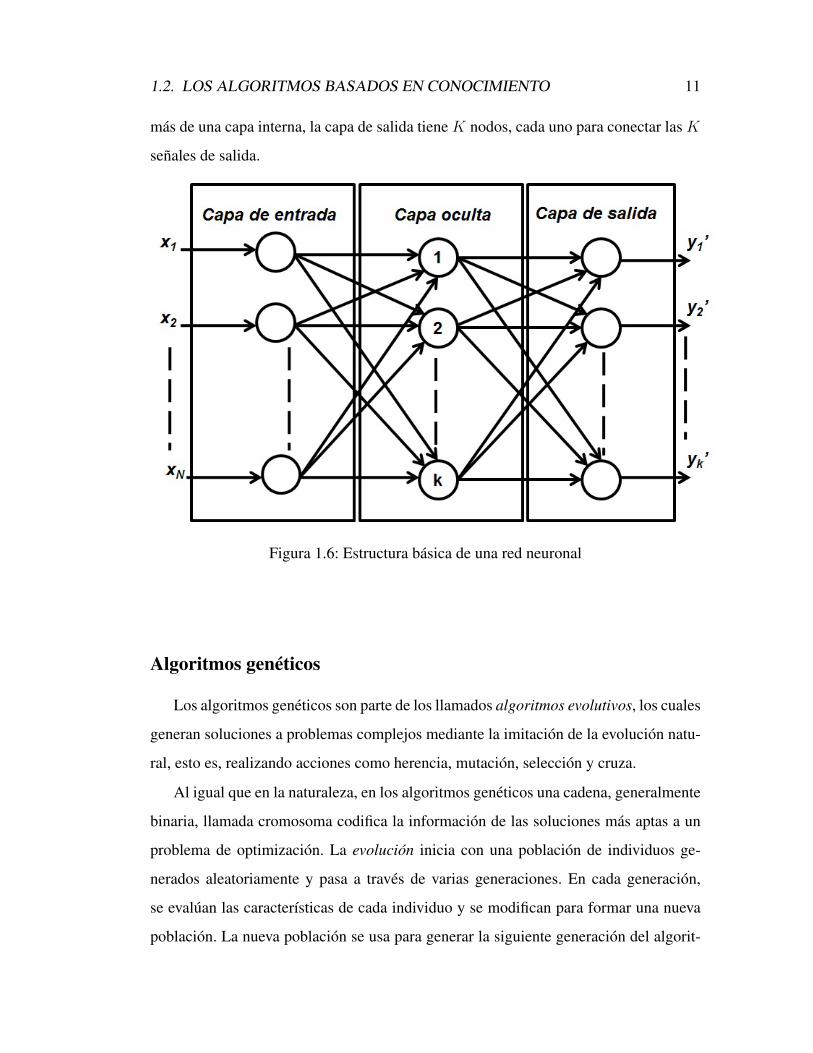
En la figura 1.6 se muestra la estructura de una red neuronal, en la que existen
N nodos en la capa de entrada, correspondiente a las N entradas del sistema, la capa
oculta se muestra de manera generalizada, considerando que esta capa puede contener
1.2. LOS ALGORITMOS BASADOS EN CONOCIMIENTO 11
más de una capa interna, la capa de salida tiene K nodos, cada uno para conectar las K
señales de salida.
Figura 1.6: Estructura básica de una red neuronal
Algoritmos genéticos
Los algoritmos genéticos son parte de los llamados algoritmos evolutivos, los cuales
generan soluciones a problemas complejos mediante la imitación de la evolución natu-
ral, esto es, realizando acciones como herencia, mutación, selección y cruza.
Al igual que en la naturaleza, en los algoritmos genéticos una cadena, generalmente
binaria, llamada cromosoma codifica la información de las soluciones más aptas a un
problema de optimización. La evolución inicia con una población de individuos ge-
nerados aleatoriamente y pasa a través de varias generaciones. En cada generación,
se evalúan las características de cada individuo y se modifican para formar una nueva
población. La nueva población se usa para generar la siguiente generación del algorit-
12 CAPÍTULO 1. INTRODUCCIÓN
mo. El algoritmo termina cuando se ha producido un número máximo de generaciones
o cuando una población ha adquirido las características deseadas.
Lógica difusa
En 1965, Lofti Z. Zadeh hace la primera publicación sobre conjuntos difusos [L.65]
motivado en gran medida por la convicción de que los métodos tradicionales de análisis
de sistemas son inadecuados para representar sistemas en los cuales las relaciones entre
variables no permiten por sí mismas ser representadas en términos de derivadas o ecua-
ciones diferenciales. Dichos sistemas son comunes en campos como biología, sociolo-
gía, economía, y, más generalmente, en campos en los cuales los sistemas tienen una
naturaleza más humanística que mecánica. Este primer trabajo constituyó los cimientos
de lo que ahora conocemos como lógica difusa. La lógica difusa modela de forma ade-
cuada la incertidumbre del pensamiento humano y ofrece un formalismo matemático
que emula el esquema de deducción humana. Debido a que la lógica difusa formaliza el
tratamiento de conocimientos vagos e imprecisos, ésta ha sentado las bases para la im-
plementación de algoritmos innovadores que dan solución a problemas complejos cuya
naturaleza, más lingüística que numérica, hace muy difícil su análisis con los métodos
tradicionales. A diferencia de la lógica Booleana, la cual utiliza solamente dos valores o
distinciones tajantes (cero y uno) trazando una línea entre los elementos que pertenecen
y los que no pertenecen a una determinada clase, la lógica difusa (también conocida co-
mo lógica multi-valuada) extiende el rango de los valores de verdad a todos los números
reales en el intervalo entre cero y uno. Desde sus inicios, la lógica difusa encontró su
principal campo de aplicación en el área de control debido a su capacidad para expresar
el conocimiento en una forma lingüística, permitiendo que cualquier sistema pueda ser
descrito por reglas simples que son fácilmente entendibles por el humano.
La figura 1.7 muestra la estructura básica de un controlador difuso. Debido a que
las entradas a un sistema electrónico son valores no lingüísticos, es necesario un bloque
de pre-procesamiento que acondicione las mediciones antes de que éstas entren en
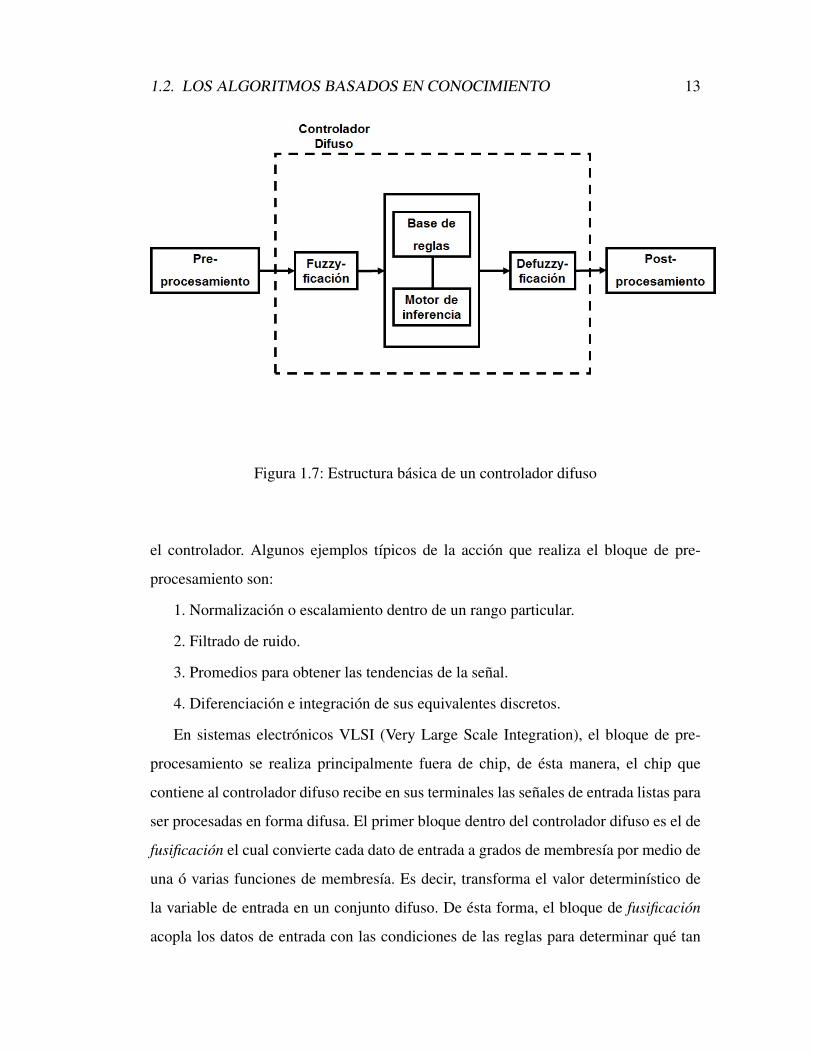
1.2. LOS ALGORITMOS BASADOS EN CONOCIMIENTO 13
Figura 1.7: Estructura básica de un controlador difuso
el controlador. Algunos ejemplos típicos de la acción que realiza el bloque de pre-
procesamiento son:
1. Normalización o escalamiento dentro de un rango particular.
2. Filtrado de ruido.
3. Promedios para obtener las tendencias de la señal.
4. Diferenciación e integración de sus equivalentes discretos.
En sistemas electrónicos VLSI (Very Large Scale Integration), el bloque de pre-
procesamiento se realiza principalmente fuera de chip, de ésta manera, el chip que
contiene al controlador difuso recibe en sus terminales las señales de entrada listas para
ser procesadas en forma difusa. El primer bloque dentro del controlador difuso es el de
fusificación el cual convierte cada dato de entrada a grados de membresía por medio de
una ó varias funciones de membresía. Es decir, transforma el valor determinístico de
la variable de entrada en un conjunto difuso. De ésta forma, el bloque de fusificación
acopla los datos de entrada con las condiciones de las reglas para determinar qué tan
14 CAPÍTULO 1. INTRODUCCIÓN
bien la condición de cada regla se acopla a una instancia de entrada particular. Existe
un grado de membresía para cada término lingüístico que aplica para cada variable de
entrada:
Θi = F (ϕc) (1.8)
donde Θi es un conjunto difuso y ϕc es la variable de entrada al controlador. Posterior-
mente, se tiene el motor de inferencia que, junto con la base de reglas, realizan la toma
de decisiones que dictarán la forma en que actuará el sistema. El método de inferencia
se basa en el grado de pertenencia de los datos de entrada en los conjuntos difusos de
los espacios correspondientes, siempre que éstas se den, para tomar una decisión en el
espacio de salida. El conjunto de reglas, que son la base de conocimiento, es del tipo
antecedente-consecuente; es decir, tiene la forma: si <condiciones difusas ó variables
de entrada>entonces <acciones de control difuso:
Si(ϕj1 = Θj1) y (ϕjq = Θjq)Entonces (f = αj1ϕj1 + αj2ϕj2 + ...+ αjqϕjq) (1.9)
Existen distintos métodos para llevar a cabo la etapa de inferencia difusa: mínimo-
máximo, máximo-producto:
µj = min(µ1, µ2) (1.10)
µj = µ1 ∗ µ2 (1.11)
El primer método es el más utilizado debido a su sencillez, aunque provoca cierta
pérdida de información ya que sólo una de las entradas es considerada (con µ mínima).
La segunda está libre de ésta desventaja, pero la membresía resultante es despropor-
cionalmente menor (el producto de dos números menores que uno es menor que el
menor de ellos). El último bloque del controlador difuso convierte los valores difusos
1.2. LOS ALGORITMOS BASADOS EN CONOCIMIENTO 15
de las variables de salida en valores concretos dentro del universo de discurso corres-
pondiente; es decir genera una acción no difusa a partir de la acción difusa resultante
del motor de inferencia. Existen varios métodos de defusificación:
1. Centro de Gravedad: la variable de salida es la abscisa bajo el centro de gravedad
del conjunto difuso:
u =
∑i µ(xi)xi∑i µ(xi)
(1.12)
Donde xi es un punto en el universo discreto y µ(xi) es el grado de membresía en la
función de membresía. La expresión puede ser interpretada como el promedio pesado
de los elementos dentro del conjunto difuso. Para aplicaciones en tiempo continuo, se
reemplazan las sumatorias por integrales, tal como se muestra a continuación:
u =
∫iµ(xi)xi∫iµ(xi)
(1.13)
Éste método es ampliamente utilizado a pesar de que su complejidad computacional
es relativamente alta. El método de Centro de Gravedad también es llamado centroide
de área.
2. Centro de gravedad por singleton. Si las funciones de membresía de los conse-
cuentes son singleton, entonces el valor de la salida es:
u =
∑i µ(si)si∑i µ(si)
(1.14)
donde si es la posición del singleton i en el universo y µ(si) es el grado de mem-
bresía. Debido a que µ es diferenciable con respecto a los singleton si éste método es
utilizado en sistemas neuro-difusos.
3. Bisector de área. Este método toma la abscisa de la línea vertical que divide el
área bajo la curva en dos mitades iguales. En sistemas en tiempo continuo:
u = x∫ x
min
µ(x)dx =
∫ max
x
µ(x)dx (1.15)
16 CAPÍTULO 1. INTRODUCCIÓN
Donde x es un punto en el universo, µ(x) es su grado de membresía, min es el
valor más pequeño del universo, y max es el valor más grande. Su complejidad com-
putacional es relativamente alta y puede ser ambigua.
4. Promedio del máximo. Es una aproximación intuitiva la cual selecciona el punto
con la posibilidad más fuerte, esto es, la máxima función de membresía. Este método
no toma en cuenta la forma del conjunto difuso, pero su complejidad computacional es
relativamente baja.
1.3. Estado del arte y trabajos previos
Se han propuesto soluciones para el acoplamiento de impedancias utilizando algo-
ritmos basados en conocimiento: en [Ayd11] Aydemir et al. hacen uso de algoritmos
inspirados en la naturaleza (colonia de hormigas) para dar solución al problema de
acoplamiento de impedancias en líneas de transmisión para microondas.
Los algoritmos genéticos han sido ampliamente utilizados en el campo del acoplamien-
to de impedancias. En [Kaz11] Onur y Maloberti proponen un método basado en al-
goritmos genéticos para maximizar el acoplamiento conjugado entre la antena y el cir-
cuito integrado, al lograrlo evitan el uso de una red de acoplamiento. Quan y Phuong
[Pha11] proponen una solución al problema de desacoplo de impedancias en sistemas
de identificación por radiofrecuencia (RFID) usando algoritmos genéticos para diseñar
una antena con una impedancia de entrada acoplada a la impedancia de un circuito
integrado. Una propuesta más para el diseño de antenas con impedancia de entrada
acoplada mediante el uso de algoritmos genéticos es presentada en [Deb11], en este
trabajo los autores usan un algoritmo de optimización para determinar las dimensiones
de una línea de transmisión para un rango de frecuencias determinado. Sun y Lau pre-
sentan en [YS98] un esquema basado en algoritmos genéticos que controla un banco
de capacitores y otro de inductores, los cuales se conectan y desconectan para entonar
una red tipo PI. Alcanzan un entonado en menos de diez generaciones. El gran uso de
recursos y área hacen poco viable su implementación en aplicaciones VLSI.
1.3. ESTADO DEL ARTE Y TRABAJOS PREVIOS 17
Por otro lado, existen también diversas propuestas para resolver el problema de
acoplamiento de impedancias utilizando redes neuronales. El diseño de antenas mi-
crostrip con un determinado valor de impedancia usando el perceptrón multicapa es
propuesto por Vilovic y Burum en [Vil12]. Nuevamente, la optimización en el diseño
de antenas para aplicaciones en identificación por radiofrecuencia es presentado por
Lacouth et. al en [Lac10], pero en este caso los autores utilizan un algoritmo de op-
timización basado en redes neuronales. Rahnama et. al proponen en [Rah10] el uso
de redes neuronales para entonar la impedancia de entrada de un amplificador de bajo
ruido (LNA) trabajando en el rango de frecuencias de 3.1 a 10.6 GHz. Otra propuesta
basada en redes neuronales es reportada por Vai et al. en [VM93], se incluyen dos es-
quemas, en uno, la red neuronal controla el movimiento de un bloque conductor que se
sobrepone a una línea microstrip, variando el área de contacto del bloque con la línea
se logra cambiar su impedancia; en el segundo esquema se hace uso de diodos que ha-
cen la función de interruptores para unir o quitar segmentos de línea y de esta forma
modificar su longitud total. Ambas propuestas están enfocadas a la realización fuera de
chip.
Otros algoritmos basados en conocimiento también han sido propuestos para acoplar
impedancias en sistemas de comunicación. En [MAJD94] Munshi, Sedra y Johns pro-
ponen una implementación en chip del algoritmo LMS (Least Mean Square) para adap-
tar una transresistencia, sin embargo solo puede adaptar impedancias reales. En [ELD08]
se presenta un método basado en un algoritmo de optimización que usa el signo del
error y el signo de la corriente de la rama de acoplamiento. Hemminger [Hem05] re-
portó un algoritmo basado en redes neuronales que realiza un acoplamiento de impedan-
cias en tiempo real sobre un rango amplio de frecuencias durante la operación del trans-
misor. Sjoblom et al [PS05] presenta una unidad de entonado adaptable de impedancias
basado en un banco de capacitores conmutados, sin embargo, no se describe la forma
de detectar la señal ni como se compara la potencia de la señal.
18 CAPÍTULO 1. INTRODUCCIÓN
1.4. Objetivos de la tesis
Objetivo general
El objetivo principal de ésta tesis es diseñar un sistema de acoplamiento de impedan-
cias con aplicación en sistemas inalámbricos trabajando en la frecuencia de 2.4GHz.
Objetivos particulares
1. Comprobar el funcionamiento del sistema propuesto mediante simulaciones a
nivel comportamental.
2. Obtener un modelo matemático del sistema para comprobar su estabilidad.
3. Proponer un controlador difuso con complejidad reducida que permita el proceso
de adaptación del sistema de acoplamiento de impedancias.
4. Implementar a nivel transistor cada uno de los bloques que conforman el sistema.
5. Realizar pruebas a nivel post-layout para comprobar la funcionalidad de la pro-
puesta, considerando el impacto de parámetros tales como temperatura y variaciones
de proceso.
1.5. Organización de la tesis
El resto de la tesis está estructurada de la siguiente manera:
Capítulo 2. En este capítulo se describe el sistema propuesto, se detalla su op-
eración y los circuitos que lo conforman.
Capítulo 3. Se presenta el modelado matemático del sistema de acoplamiento de
impedancias y se prueba su estabilidad.
Capíulo 4. En este capítulo se muestran los resultados obtenidos de las simula-
ciones post-layout del sistema.
Capítulo 5. En este último capítulo se presentan las conclusiones obtenidas y el
trabajo futuro.
1.6. DISCUSIÓN DEL CAPÍTULO 19
1.6. Discusión del capítulo
En este capítulo se presentó un panorama general del problema de desacoplo de
impedancias en sistemas de comunicación inalámbrica. Se detallaron los dos princi-
pales problemas de degradación de la señal (crosstalk y reflexión) y las técnicas para
solucionarlos.
Se realizó un análisis de los puntos en donde se presentan reflexiones de la señal
en un sistema de comunicación inalámbrica y se hizo una revisión del estado del arte
para solucionar el desacoplo de impedancias en cada uno de éstos puntos. Ésta revisión
muestra que la mayoría de las propuestas utilizan bancos de capacitores y de inductores
para adaptar las impedancias e implementaciones digitales o mixtas para controlar di-
chos bancos. Esto hace inviable la mayoría de las propuestas para su implementación
en sistemas VLSI, en donde el área y potencia son parámetros que se deben minimizar
al máximo.
Finalmente se presentan los objetivos general y particulares planteados en esta tesis.

Capítulo 2
Sistema de acoplamiento de
impedancias
En este capítulo se presenta el sistema de acoplamiento de impedancias propuesto, se
detalla su funcionamiento y se explican cada una de las partes que lo conforman
2.1. Justificación
Uno de los problemas mas importantes en los sistemas de comunicación actuales
es la integridad de la señal. Conforme la velocidad de operación de dichos sistemas
de comunicacón aumenta, algunos efectos físicos tales como reflexión y crosstalk se
vuelven siginificativos. Como ya se ha mencionado, el problema de la reflexión se debe
al desacoplo que existe entre la impedancia de la fuente y la impedancia de la carga, lo
cual provoca que en un canal de comunicacion existan señales reflejadas en cualquier
dirección, de la fuente a la carga o de la carga a la fuente.
Como se pudo observar en el Capítulo 1, la formulación de un modelo matemático
exacto para el desacoplo de impedancias es un proceso muy complejo, debido a que los
parámetros involucrados dependen de muchos factores como variaciones de proceso,
variación de la longitud de las líneas de interconexión, frecuencia de operación, tem-
21
22 CAPÍTULO 2. SISTEMA DE ACOPLAMIENTO DE IMPEDANCIAS
peratura, etc. Debido a esto el uso de técnicas de control convencionales es poco viable
ya que requieren necesariamente de un modelo matemático exacto del sistema.
Una alternativa de control interesante a ser explorada en sistemas donde un modelo
matematico no es viable de obtener son los llamados algoritmos basados en conocimien-
to. Como su nombre lo indica, estos algoritmos hacen uso del conocimiento de un ex-
perto para poder solucionar un problema. Ejemplo de este tipo de algoritmos son las
redes neuronales y los sistemas difusos.
2.2. Propuestas de solución
En esta sección se presentan propuestas de esquemas adaptables para el acoplamien-
to de impedancias de sistemas que trabajan en la banda de frecuencia de Wi-Fi y
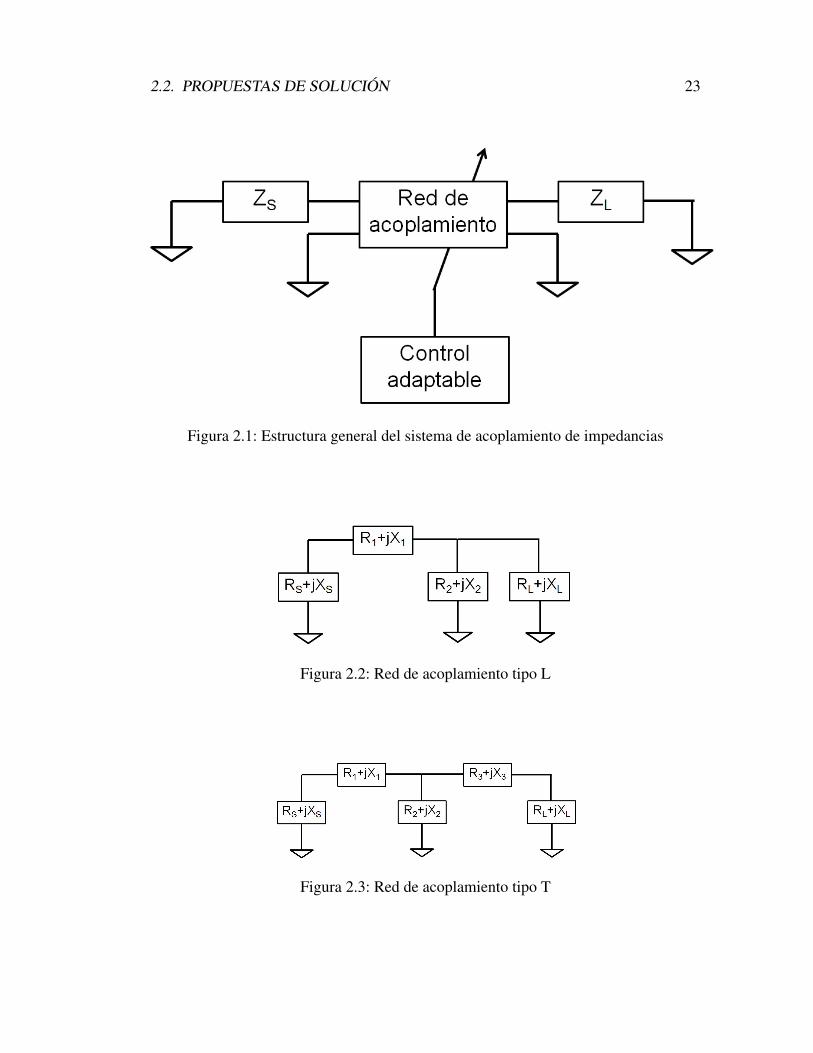
Bluetooth (2.4GHz). En la figura 2.1 se muestra el esquema general utilizado para
el acoplamiento de impedancias. En donde ZS y ZL representan las impedancias de
fuente y carga respectivamente, las cuales pueden tener valores complejos. La red de
acoplamiento es una red de dos puertos que puede tener cualquiera de las configura-
ciones mostradas en las figuras 2.2, 2.3 y 2.4.
Para implementar el control adaptable del sistema de acoplamiento de impedancias,
se proponen tres diferentes topologías: controlador difuso, interpolador signo-signo e
interpolador sigmoidal. Estas propuestas fueron probadas a nivel algoritmo utilizando
resultados obtenidos de Matlab.
Controlador difuso
La primera propuesta se basa en un controlador difuso. La idea de utilizar este con-
trolador es debido a su capacidad de resolver problemas en donde es difícil la obtención
de un modelo matemático completo. El controlador es uno de tipo Takagi-Sugeno de
orden cero con una entrada y una salida y tres funciones de membresía. Las funciones
2.2. PROPUESTAS DE SOLUCIÓN 23
Figura 2.1: Estructura general del sistema de acoplamiento de impedancias
Figura 2.2: Red de acoplamiento tipo L
Figura 2.3: Red de acoplamiento tipo T
24 CAPÍTULO 2. SISTEMA DE ACOPLAMIENTO DE IMPEDANCIAS
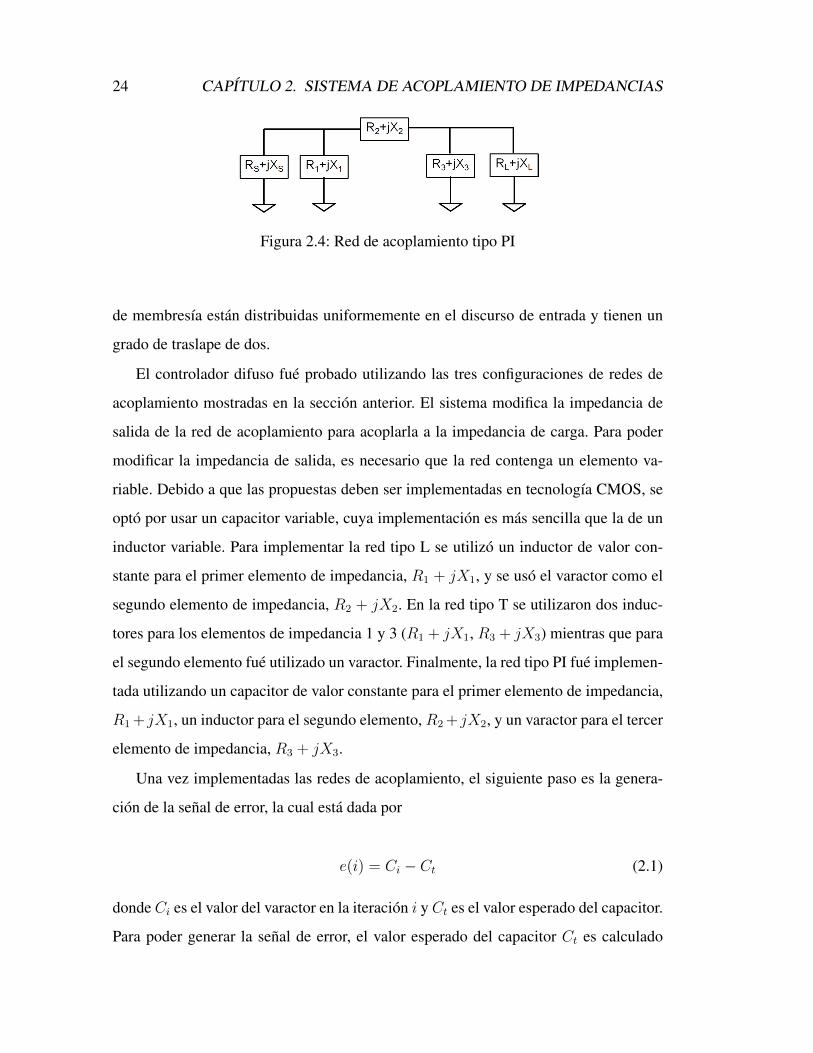
Figura 2.4: Red de acoplamiento tipo PI
de membresía están distribuidas uniformemente en el discurso de entrada y tienen un
grado de traslape de dos.
El controlador difuso fué probado utilizando las tres configuraciones de redes de
acoplamiento mostradas en la sección anterior. El sistema modifica la impedancia de
salida de la red de acoplamiento para acoplarla a la impedancia de carga. Para poder
modificar la impedancia de salida, es necesario que la red contenga un elemento va-
riable. Debido a que las propuestas deben ser implementadas en tecnología CMOS, se
optó por usar un capacitor variable, cuya implementación es más sencilla que la de un
inductor variable. Para implementar la red tipo L se utilizó un inductor de valor con-
stante para el primer elemento de impedancia, R1 + jX1, y se usó el varactor como el
segundo elemento de impedancia, R2 + jX2. En la red tipo T se utilizaron dos induc-
tores para los elementos de impedancia 1 y 3 (R1 + jX1, R3 + jX3) mientras que para
el segundo elemento fué utilizado un varactor. Finalmente, la red tipo PI fué implemen-
tada utilizando un capacitor de valor constante para el primer elemento de impedancia,
R1 + jX1, un inductor para el segundo elemento, R2 + jX2, y un varactor para el tercer
elemento de impedancia, R3 + jX3.
Una vez implementadas las redes de acoplamiento, el siguiente paso es la genera-
ción de la señal de error, la cual está dada por
e(i) = Ci − Ct (2.1)
donde Ci es el valor del varactor en la iteración i y Ct es el valor esperado del capacitor.
Para poder generar la señal de error, el valor esperado del capacitor Ct es calculado
2.2. PROPUESTAS DE SOLUCIÓN 25
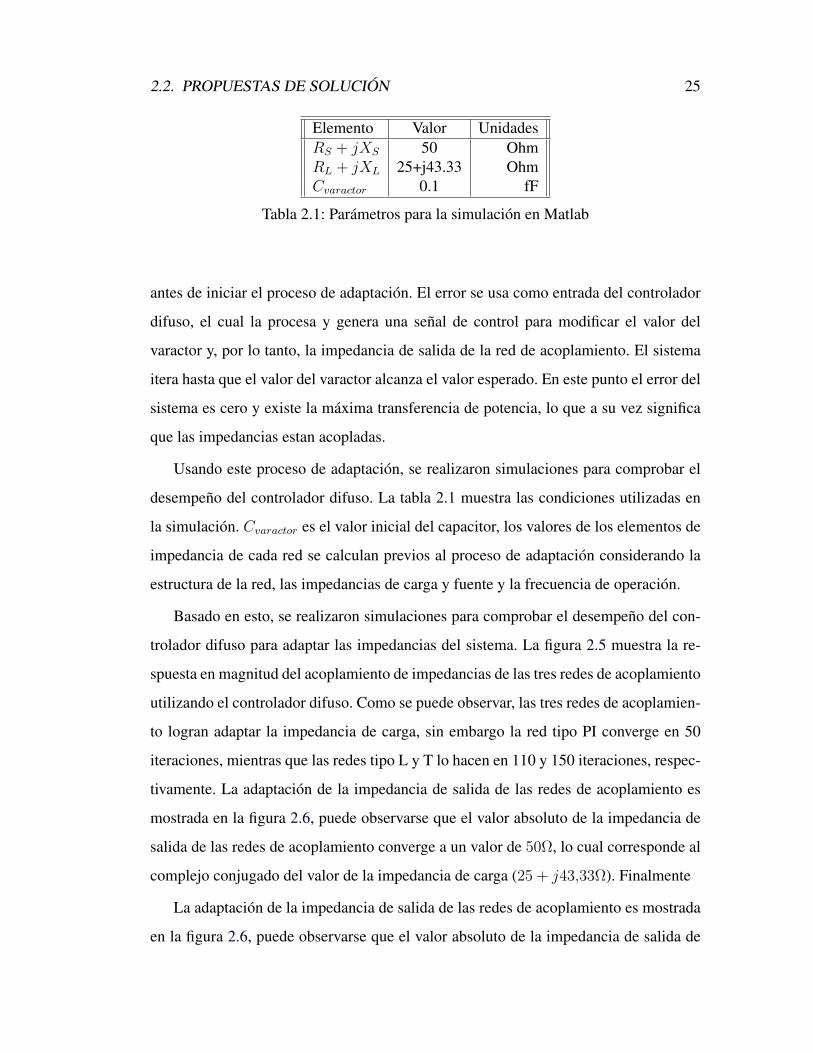
Elemento Valor UnidadesRS + jXS 50 OhmRL + jXL 25+j43.33 OhmCvaractor 0.1 fF
Tabla 2.1: Parámetros para la simulación en Matlab
antes de iniciar el proceso de adaptación. El error se usa como entrada del controlador
difuso, el cual la procesa y genera una señal de control para modificar el valor del
varactor y, por lo tanto, la impedancia de salida de la red de acoplamiento. El sistema
itera hasta que el valor del varactor alcanza el valor esperado. En este punto el error del
sistema es cero y existe la máxima transferencia de potencia, lo que a su vez significa
que las impedancias estan acopladas.
Usando este proceso de adaptación, se realizaron simulaciones para comprobar el
desempeño del controlador difuso. La tabla 2.1 muestra las condiciones utilizadas en
la simulación. Cvaractor es el valor inicial del capacitor, los valores de los elementos de
impedancia de cada red se calculan previos al proceso de adaptación considerando la
estructura de la red, las impedancias de carga y fuente y la frecuencia de operación.
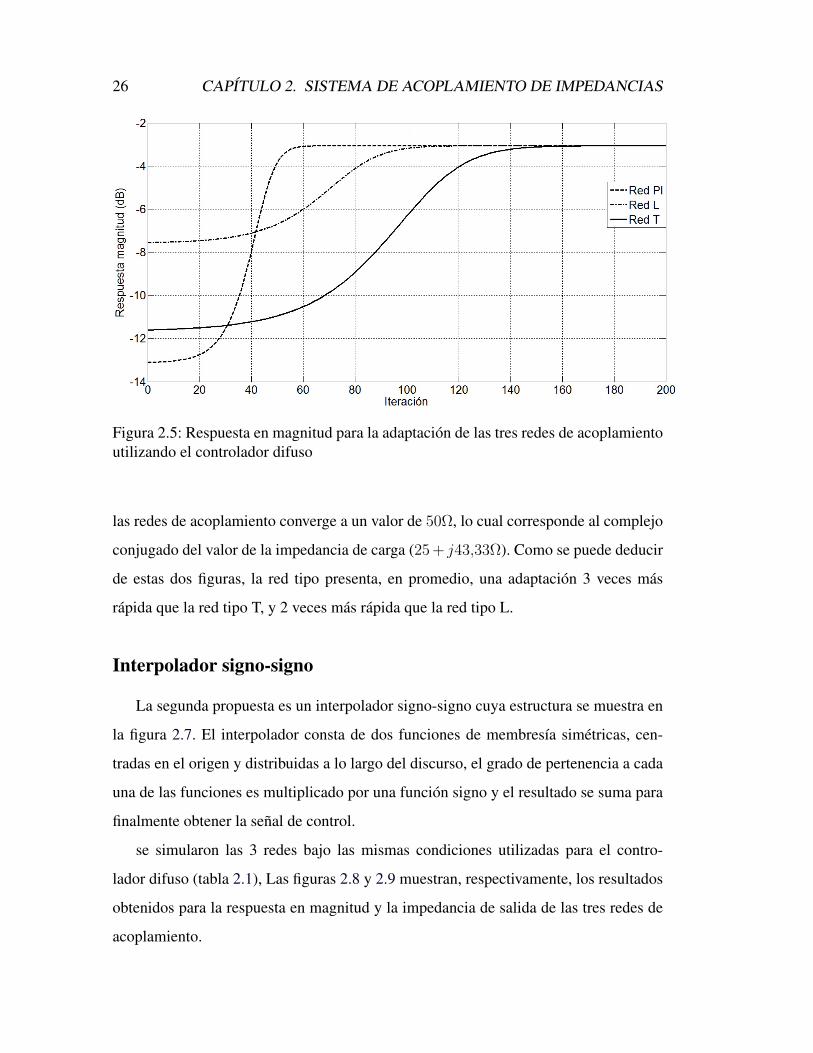
Basado en esto, se realizaron simulaciones para comprobar el desempeño del con-
trolador difuso para adaptar las impedancias del sistema. La figura 2.5 muestra la re-
spuesta en magnitud del acoplamiento de impedancias de las tres redes de acoplamiento
utilizando el controlador difuso. Como se puede observar, las tres redes de acoplamien-
to logran adaptar la impedancia de carga, sin embargo la red tipo PI converge en 50
iteraciones, mientras que las redes tipo L y T lo hacen en 110 y 150 iteraciones, respec-
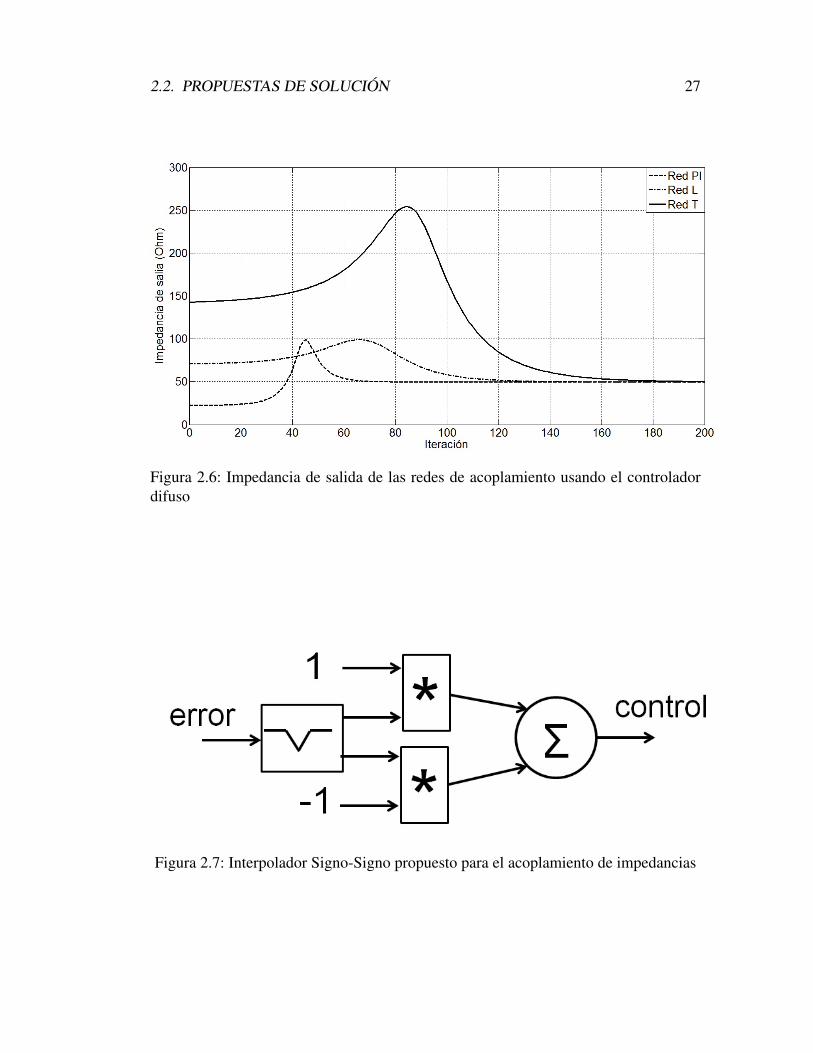
tivamente. La adaptación de la impedancia de salida de las redes de acoplamiento es
mostrada en la figura 2.6, puede observarse que el valor absoluto de la impedancia de
salida de las redes de acoplamiento converge a un valor de 50Ω, lo cual corresponde al
complejo conjugado del valor de la impedancia de carga (25 + j43,33Ω). Finalmente
La adaptación de la impedancia de salida de las redes de acoplamiento es mostrada
en la figura 2.6, puede observarse que el valor absoluto de la impedancia de salida de
26 CAPÍTULO 2. SISTEMA DE ACOPLAMIENTO DE IMPEDANCIAS
Figura 2.5: Respuesta en magnitud para la adaptación de las tres redes de acoplamientoutilizando el controlador difuso
las redes de acoplamiento converge a un valor de 50Ω, lo cual corresponde al complejo
conjugado del valor de la impedancia de carga (25 + j43,33Ω). Como se puede deducir
de estas dos figuras, la red tipo presenta, en promedio, una adaptación 3 veces más
rápida que la red tipo T, y 2 veces más rápida que la red tipo L.
Interpolador signo-signo
La segunda propuesta es un interpolador signo-signo cuya estructura se muestra en
la figura 2.7. El interpolador consta de dos funciones de membresía simétricas, cen-
tradas en el origen y distribuidas a lo largo del discurso, el grado de pertenencia a cada
una de las funciones es multiplicado por una función signo y el resultado se suma para
finalmente obtener la señal de control.
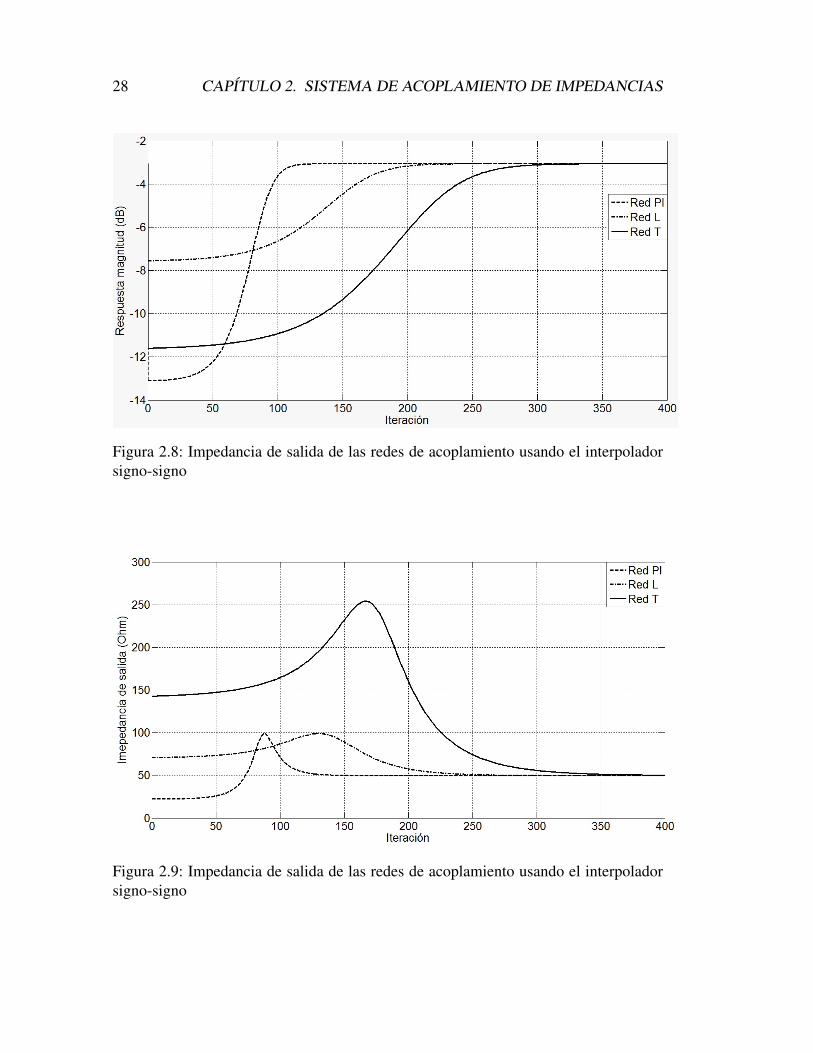
se simularon las 3 redes bajo las mismas condiciones utilizadas para el contro-
lador difuso (tabla 2.1), Las figuras 2.8 y 2.9 muestran, respectivamente, los resultados
obtenidos para la respuesta en magnitud y la impedancia de salida de las tres redes de
acoplamiento.
2.2. PROPUESTAS DE SOLUCIÓN 27
Figura 2.6: Impedancia de salida de las redes de acoplamiento usando el controladordifuso
Figura 2.7: Interpolador Signo-Signo propuesto para el acoplamiento de impedancias
28 CAPÍTULO 2. SISTEMA DE ACOPLAMIENTO DE IMPEDANCIAS
Figura 2.8: Impedancia de salida de las redes de acoplamiento usando el interpoladorsigno-signo
Figura 2.9: Impedancia de salida de las redes de acoplamiento usando el interpoladorsigno-signo
2.2. PROPUESTAS DE SOLUCIÓN 29
Puede observarse que el sistema adaptado mediante el interpolador signo-signo pre-
senta un comportamiento muy parecido al del controlador difuso, sin embargo el proce-
so de adaptación toma, aproximadamente, el doble de iteraciones para lograr converger
al punto de máxima transferencia de potencia.
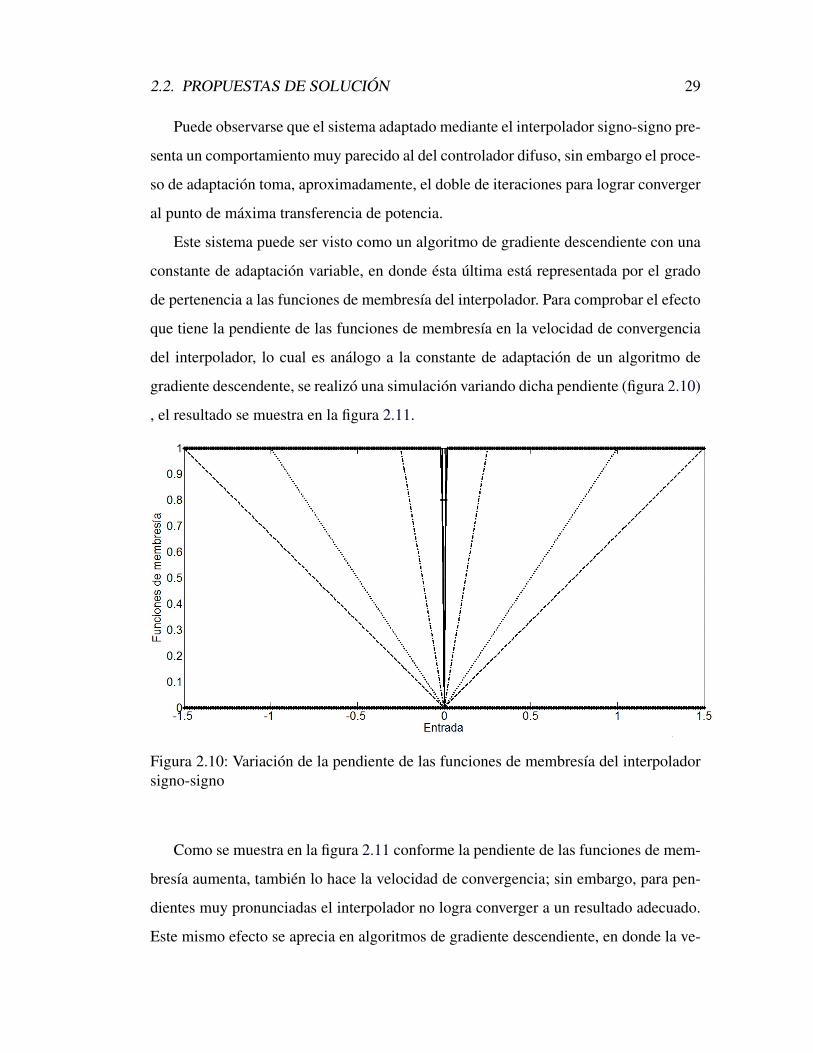
Este sistema puede ser visto como un algoritmo de gradiente descendiente con una
constante de adaptación variable, en donde ésta última está representada por el grado
de pertenencia a las funciones de membresía del interpolador. Para comprobar el efecto
que tiene la pendiente de las funciones de membresía en la velocidad de convergencia
del interpolador, lo cual es análogo a la constante de adaptación de un algoritmo de
gradiente descendente, se realizó una simulación variando dicha pendiente (figura 2.10)
, el resultado se muestra en la figura 2.11.
Figura 2.10: Variación de la pendiente de las funciones de membresía del interpoladorsigno-signo
Como se muestra en la figura 2.11 conforme la pendiente de las funciones de mem-
bresía aumenta, también lo hace la velocidad de convergencia; sin embargo, para pen-
dientes muy pronunciadas el interpolador no logra converger a un resultado adecuado.
Este mismo efecto se aprecia en algoritmos de gradiente descendiente, en donde la ve-
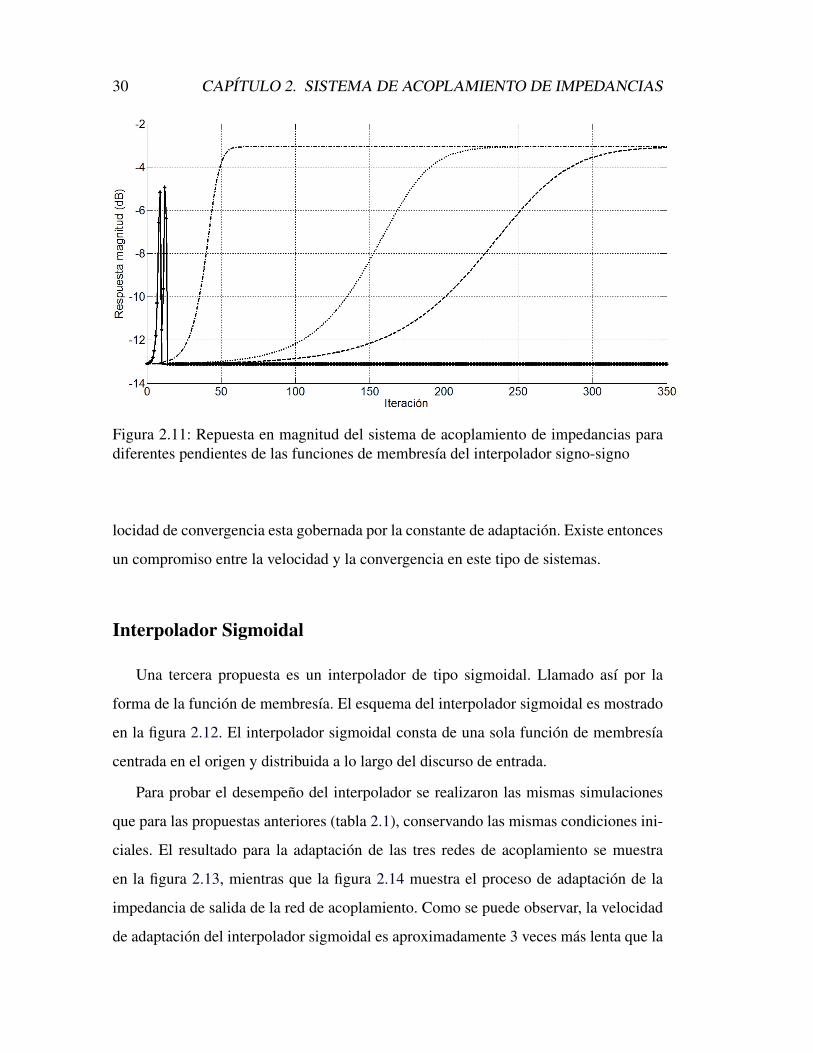
30 CAPÍTULO 2. SISTEMA DE ACOPLAMIENTO DE IMPEDANCIAS
Figura 2.11: Repuesta en magnitud del sistema de acoplamiento de impedancias paradiferentes pendientes de las funciones de membresía del interpolador signo-signo
locidad de convergencia esta gobernada por la constante de adaptación. Existe entonces
un compromiso entre la velocidad y la convergencia en este tipo de sistemas.
Interpolador Sigmoidal
Una tercera propuesta es un interpolador de tipo sigmoidal. Llamado así por la
forma de la función de membresía. El esquema del interpolador sigmoidal es mostrado
en la figura 2.12. El interpolador sigmoidal consta de una sola función de membresía
centrada en el origen y distribuida a lo largo del discurso de entrada.
Para probar el desempeño del interpolador se realizaron las mismas simulaciones
que para las propuestas anteriores (tabla 2.1), conservando las mismas condiciones ini-
ciales. El resultado para la adaptación de las tres redes de acoplamiento se muestra
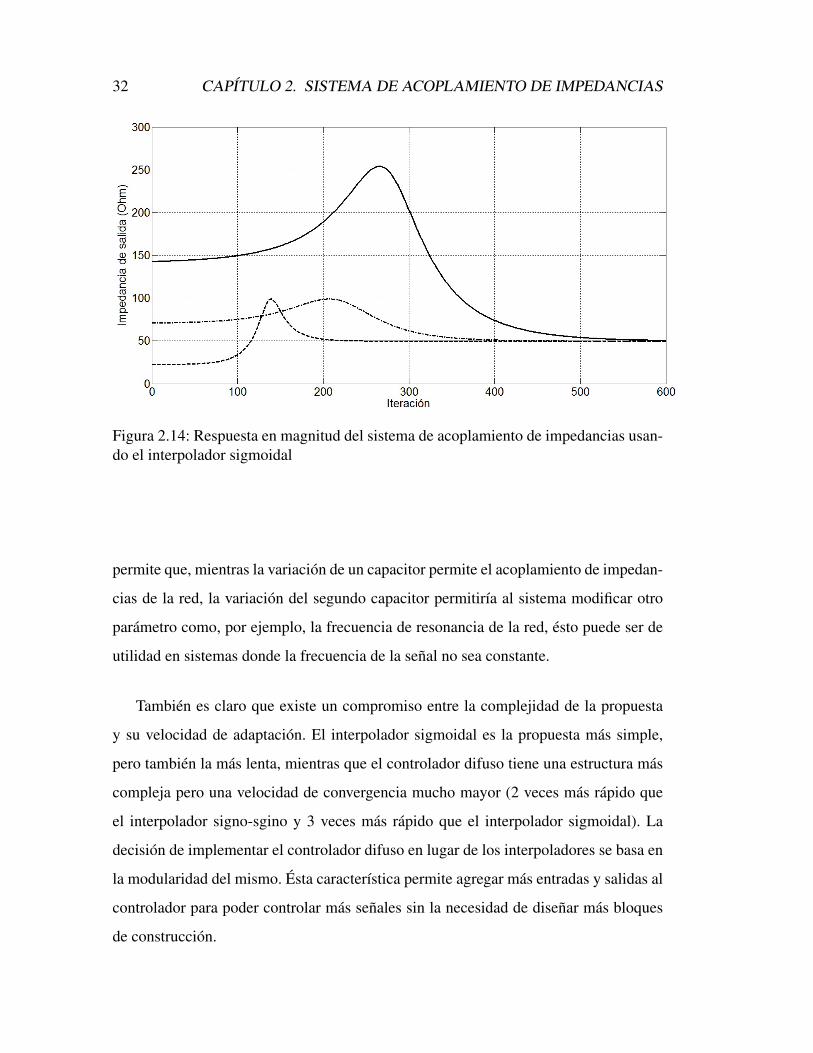
en la figura 2.13, mientras que la figura 2.14 muestra el proceso de adaptación de la
impedancia de salida de la red de acoplamiento. Como se puede observar, la velocidad
de adaptación del interpolador sigmoidal es aproximadamente 3 veces más lenta que la
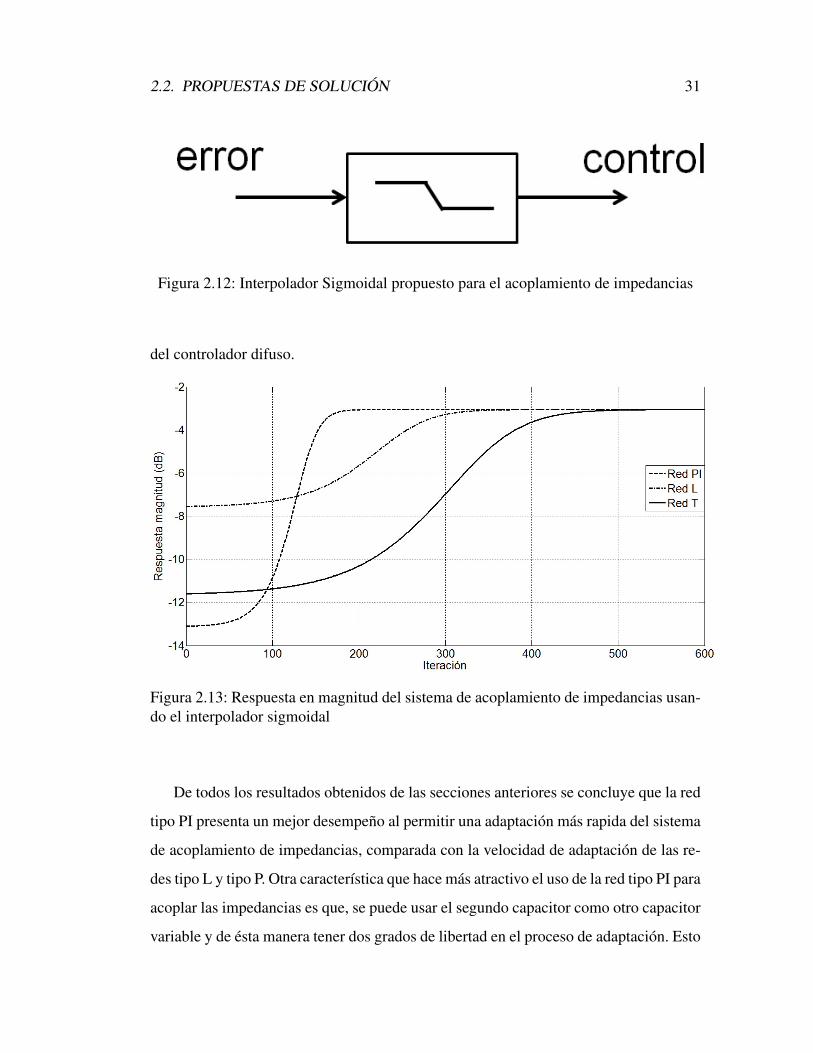
2.2. PROPUESTAS DE SOLUCIÓN 31
Figura 2.12: Interpolador Sigmoidal propuesto para el acoplamiento de impedancias
del controlador difuso.
Figura 2.13: Respuesta en magnitud del sistema de acoplamiento de impedancias usan-do el interpolador sigmoidal
De todos los resultados obtenidos de las secciones anteriores se concluye que la red
tipo PI presenta un mejor desempeño al permitir una adaptación más rapida del sistema
de acoplamiento de impedancias, comparada con la velocidad de adaptación de las re-
des tipo L y tipo P. Otra característica que hace más atractivo el uso de la red tipo PI para
acoplar las impedancias es que, se puede usar el segundo capacitor como otro capacitor
variable y de ésta manera tener dos grados de libertad en el proceso de adaptación. Esto
32 CAPÍTULO 2. SISTEMA DE ACOPLAMIENTO DE IMPEDANCIAS
Figura 2.14: Respuesta en magnitud del sistema de acoplamiento de impedancias usan-do el interpolador sigmoidal
permite que, mientras la variación de un capacitor permite el acoplamiento de impedan-
cias de la red, la variación del segundo capacitor permitiría al sistema modificar otro
parámetro como, por ejemplo, la frecuencia de resonancia de la red, ésto puede ser de
utilidad en sistemas donde la frecuencia de la señal no sea constante.
También es claro que existe un compromiso entre la complejidad de la propuesta
y su velocidad de adaptación. El interpolador sigmoidal es la propuesta más simple,
pero también la más lenta, mientras que el controlador difuso tiene una estructura más
compleja pero una velocidad de convergencia mucho mayor (2 veces más rápido que
el interpolador signo-sgino y 3 veces más rápido que el interpolador sigmoidal). La
decisión de implementar el controlador difuso en lugar de los interpoladores se basa en
la modularidad del mismo. Ésta característica permite agregar más entradas y salidas al
controlador para poder controlar más señales sin la necesidad de diseñar más bloques
de construcción.
2.3. SISTEMA IMPLEMENTADO 33
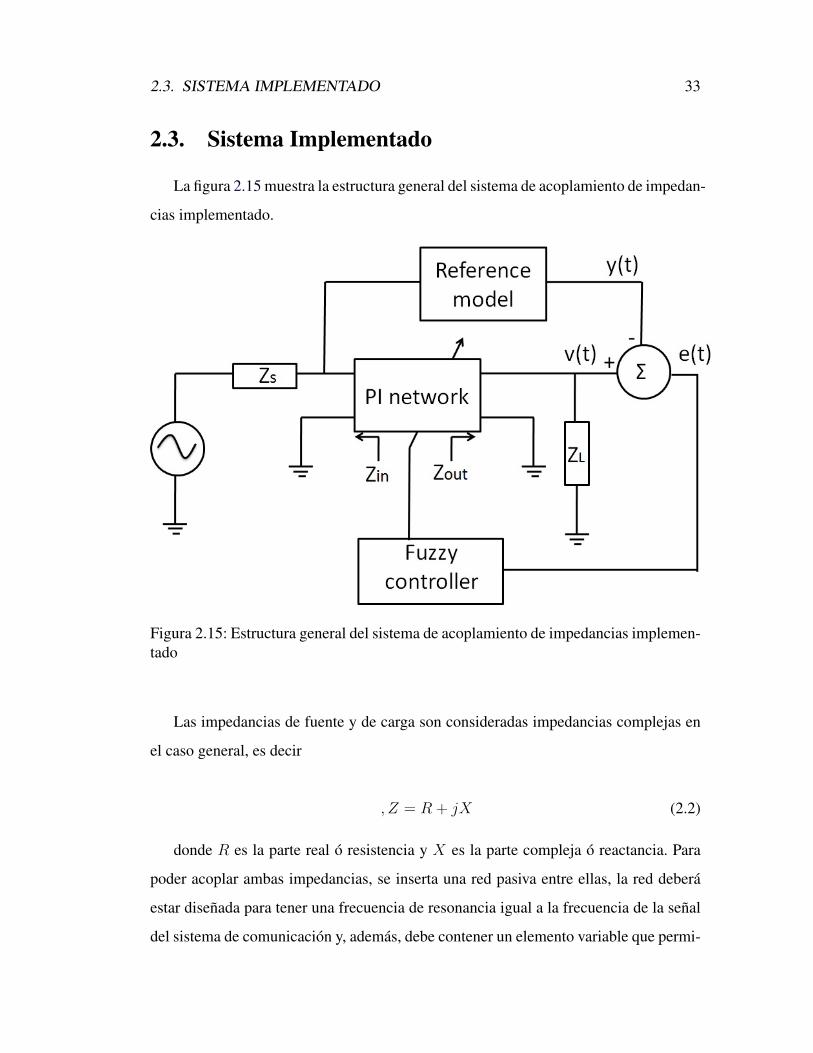
2.3. Sistema Implementado
La figura 2.15 muestra la estructura general del sistema de acoplamiento de impedan-
cias implementado.
Figura 2.15: Estructura general del sistema de acoplamiento de impedancias implemen-tado
Las impedancias de fuente y de carga son consideradas impedancias complejas en
el caso general, es decir
, Z = R + jX (2.2)
donde R es la parte real ó resistencia y X es la parte compleja ó reactancia. Para
poder acoplar ambas impedancias, se inserta una red pasiva entre ellas, la red deberá
estar diseñada para tener una frecuencia de resonancia igual a la frecuencia de la señal
del sistema de comunicación y, además, debe contener un elemento variable que permi-
34 CAPÍTULO 2. SISTEMA DE ACOPLAMIENTO DE IMPEDANCIAS
ta cambiar su impedancia tanto de entrada Zin como de salida Zout para que el proceso
de acoplamiento de impedancias pueda darse.
El modelo de referencia genera, como su nombre lo indica, una señal de referencia
y(t) que es usada para calcular el error, dado por
e(t) = v(t)− y(t) (2.3)
donde e(t) es el error, v(t) es la salida del sistema y y(t) es, como ya se dijo, la señal
de referencia. Finalmente, el controlador difuso toma la señal de error y genera una
señal de control para modificar el valor del elemento variable en la red de acoplamiento.
El proceso de adaptación puede resumirse como sigue:
1. El sistema genera la señal de error de acuerdo con la ecuación 2.3. 2. La señal
de error es utilizada por el controlador difuso para generar una señal de control. 3. La
señal de control modifica el valor del elemento variable en la red de acoplamiento. 4. El
cambio de valor del elemento variable provoca un cambio en la impedancia de salida
de la red de acoplamiento Zout.
El sistema itera hasta que se satisface la condición de acoplamiento de impedancias
dado por
ZL = Z∗out (2.4)
Donde (∗) denota el complejo conjugado. Es claro que el cumplimiento de la condi-
ción de acoplamiento de impedancias implica que el error es cero e(t) = 0. Cuando la
señal de error es cero, el controlador mantiene la señal de control para conservar el
valor actual del elemento variable en la red de acoplamiento y, por ende, la impedancia
de salida. El sistema se mantendrá sin variaciones hasta que se produzca algún cambio
en el valor de las impedancias de carga o de fuente, esto provocará que el error sea
diferente de cero y el proceso iterativo de adaptación inicie de nuevo.
En las siguientes secciones se detalla el diseño y desempeño de las partes que con-
forman el sistema de acoplamiento de impedancias.
2.3. SISTEMA IMPLEMENTADO 35
El controlador difuso
Una de las características principales que se deben tomar en cuenta cuando se pro-
pone el diseño de un circuito integrado es el consumo tanto de área como de potencia.
Esta característica se vuelve más crítica cuando el circuito a diseñar es una parte adi-
cional al sistema en general, un accesorio que mejora alguna característica en particular.
El controlador difuso es precisamente un componente adicional al sistema de comuni-
cación inalámbrica que reducirá significativamente las pérdidas de señal provocadas
por el desacoplo de impedancias, por tal motivo el controlador difuso propuesto es un
controlador diseñado para ser sencillo pero sin dejar de lado su funcionalidad.
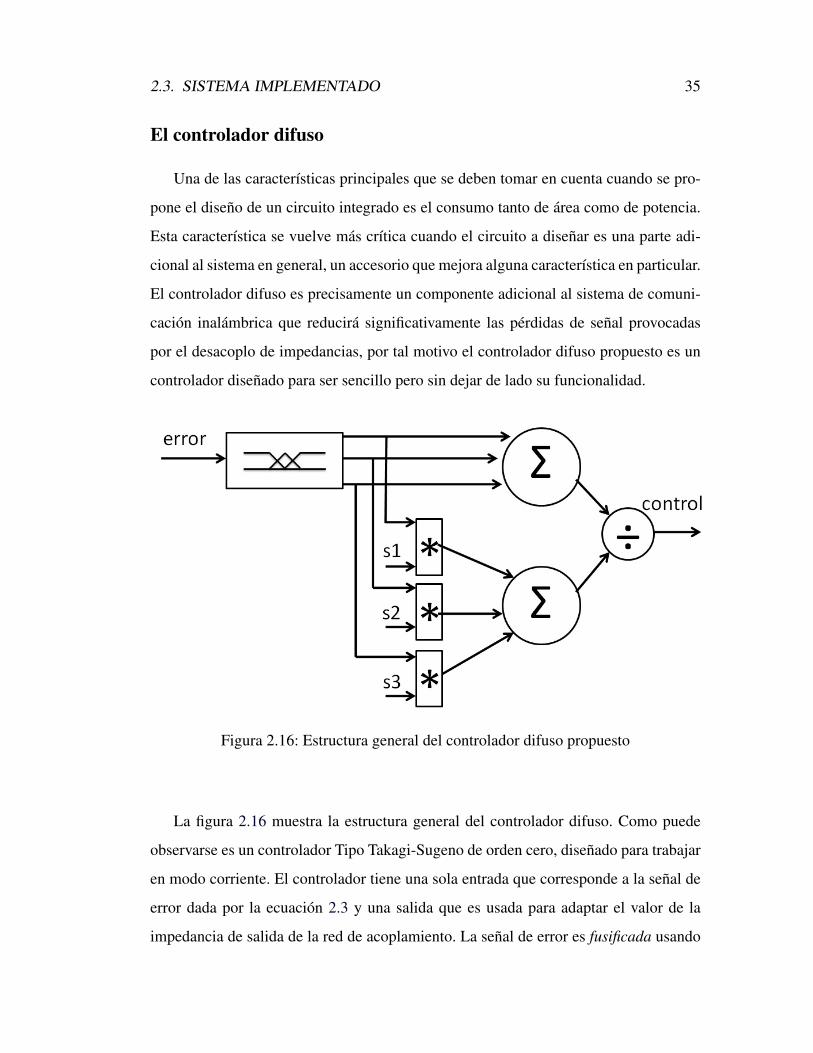
Figura 2.16: Estructura general del controlador difuso propuesto
La figura 2.16 muestra la estructura general del controlador difuso. Como puede
observarse es un controlador Tipo Takagi-Sugeno de orden cero, diseñado para trabajar
en modo corriente. El controlador tiene una sola entrada que corresponde a la señal de
error dada por la ecuación 2.3 y una salida que es usada para adaptar el valor de la
impedancia de salida de la red de acoplamiento. La señal de error es fusificada usando
36 CAPÍTULO 2. SISTEMA DE ACOPLAMIENTO DE IMPEDANCIAS
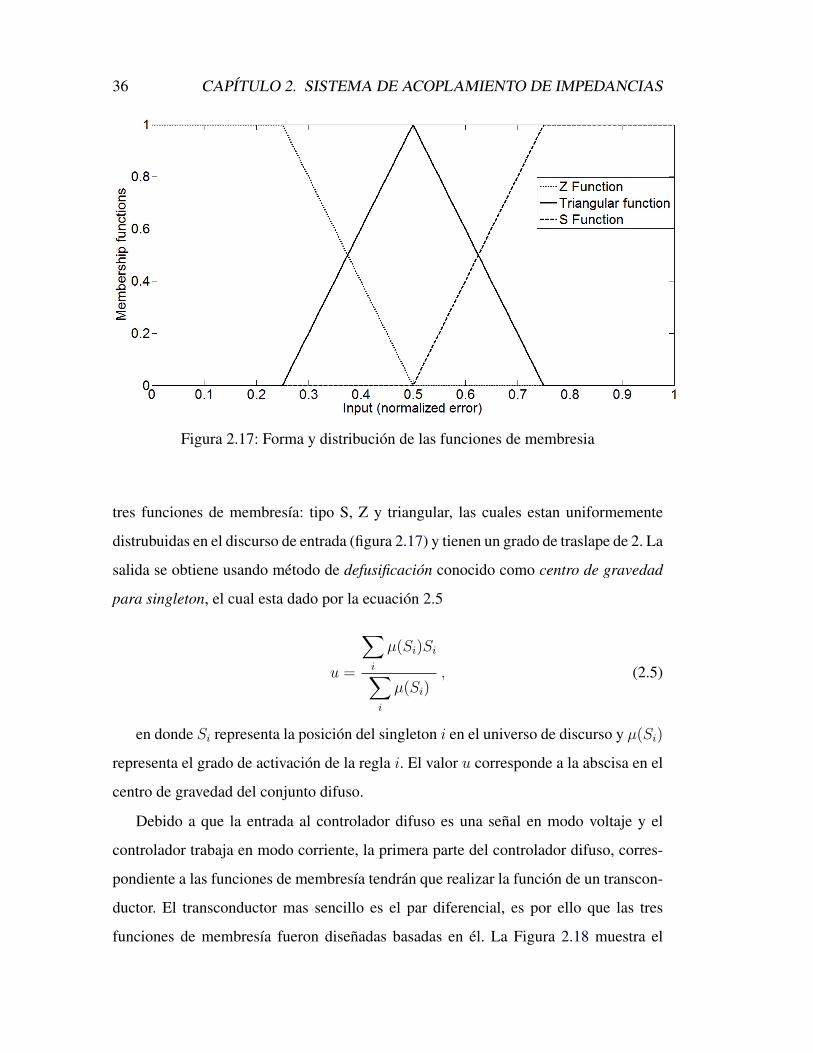
Figura 2.17: Forma y distribución de las funciones de membresia
tres funciones de membresía: tipo S, Z y triangular, las cuales estan uniformemente
distrubuidas en el discurso de entrada (figura 2.17) y tienen un grado de traslape de 2. La
salida se obtiene usando método de defusificación conocido como centro de gravedad
para singleton, el cual esta dado por la ecuación 2.5
u =
∑i
µ(Si)Si∑i
µ(Si), (2.5)
en donde Si representa la posición del singleton i en el universo de discurso y µ(Si)
representa el grado de activación de la regla i. El valor u corresponde a la abscisa en el
centro de gravedad del conjunto difuso.
Debido a que la entrada al controlador difuso es una señal en modo voltaje y el
controlador trabaja en modo corriente, la primera parte del controlador difuso, corres-
pondiente a las funciones de membresía tendrán que realizar la función de un transcon-
ductor. El transconductor mas sencillo es el par diferencial, es por ello que las tres
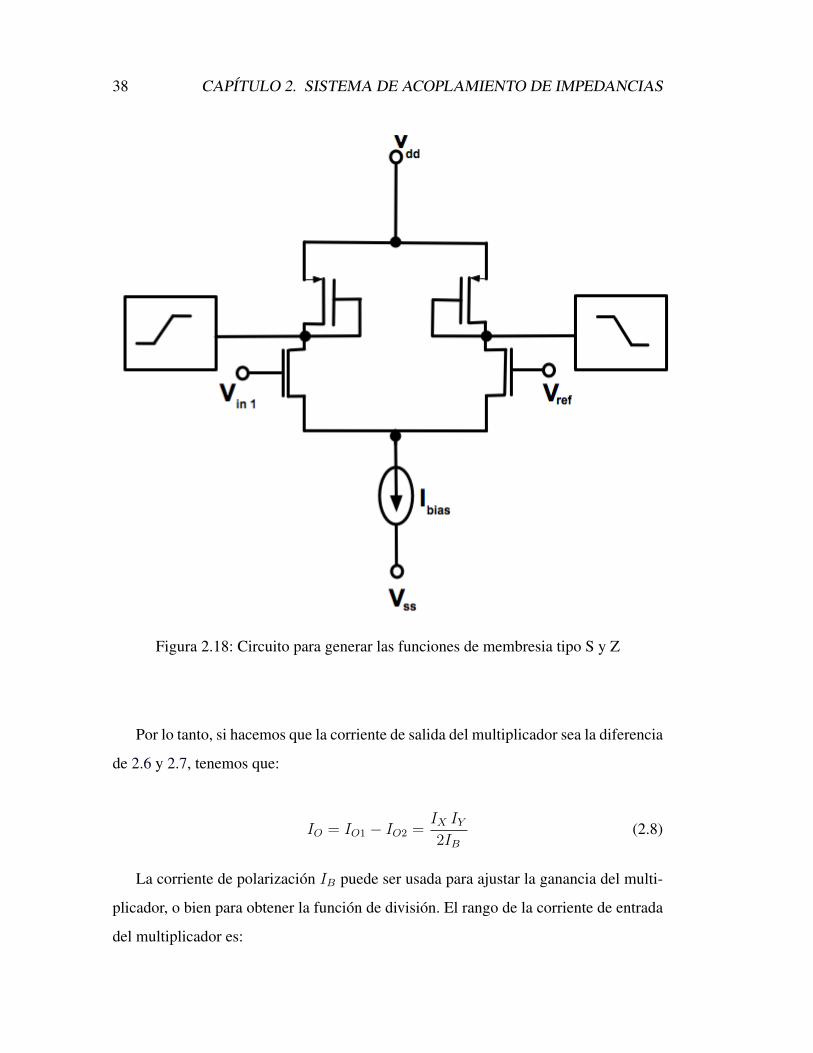
funciones de membresía fueron diseñadas basadas en él. La Figura 2.18 muestra el
2.3. SISTEMA IMPLEMENTADO 37
circuito utilizado para la generación de las funciones de membresía tipo S y tipo Z.
Cuando el voltaje de entrada Vin1 es menor que el voltaje de referencia Vref la corri-
ente que fluye en una rama del par diferencial es cero, mientras que en la otra rama es
igual a Ibias. Conforme el valor de Vin1 aumenta, la corriente empieza a balancearse en
ambas ramas, aumentando el flujo en una rama y disminuyendo en la otra, ya que la
suma de las corrientes a través de ambas ramas es siempre igual a Ibias. Cuando Vin1
es mayor que Vref entonces toda la corriente fluye sobre la otra rama. La bondad de
este circuito es que, dependiendo de en que rama se tome la señal de salida, se puede
obtener la función S o la función Z, tal como se muestra en la Figura 2.18. Para generar
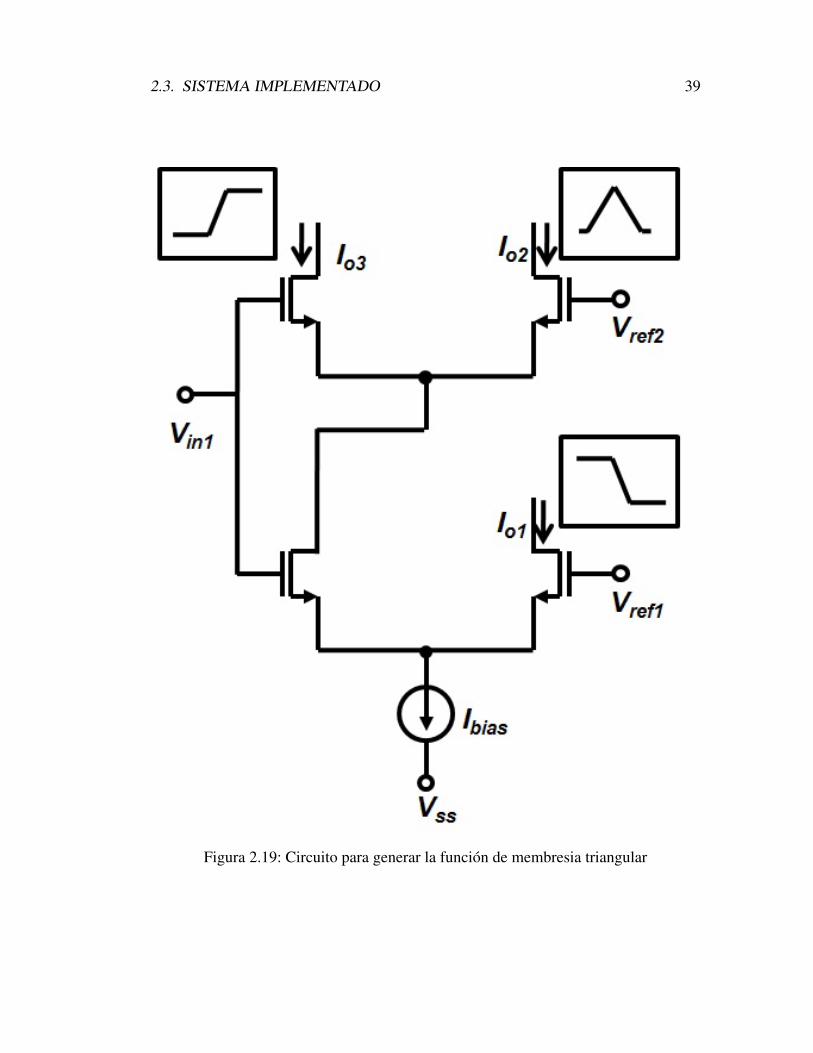
la función de membresia tipo triangular se utilizó el circuito mostrado en la figura 2.19,
el cual consta de dos pares diferenciales polarizados por fuentes de corriente idénticas.
Como se puede observar, el circuito es capaz de generar los tres tipos de funciones de
membresía, sin embargo los puntos de quiebre de cada una de las corrientes de salida
IO1,IO2, IO3, están condicionados por los voltajes de referencia Vref1 y Vref2 lo cual
impide una programación independiente de cada una de las señales, es por ésta razón
que el circuito mostrado solo se utiliza para la generación de la función de membresía
tipo triangular.
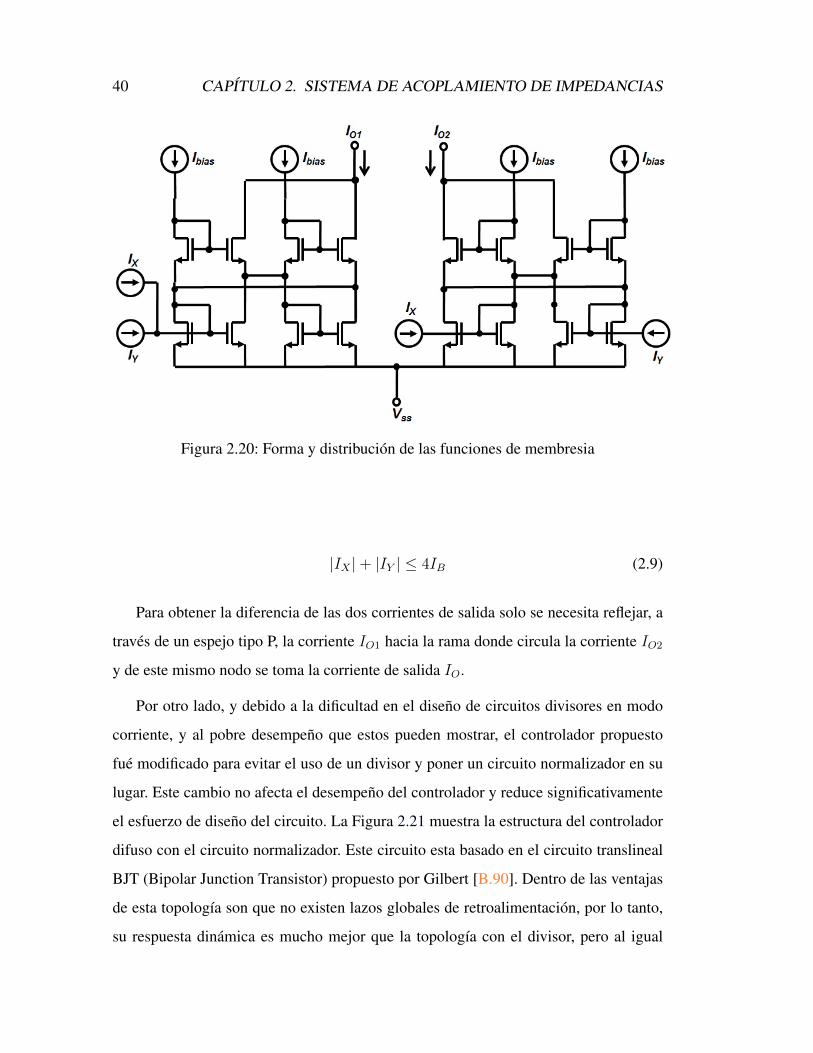
Para realizar la operación de multiplicación, se utilizó el circuito mostrado en la
figura 2.20. Como se puede observar es un multiplicador de cuatro cuadrantes basado
en el principio translineal propuesto por Wiegerink y Seevinck [R.98].El multiplicador
translineal opera en la región de saturación y esta compuesto de dos celdas que realizan
la función cuadrática, es decir, su salida es una función del cuadrado de las entradas,
esto es
IO1 = 2IB + ((IY + IX)2
8IB(2.6)
y
IO2 = 2IB + ((IY − IX)2
8IB(2.7)
38 CAPÍTULO 2. SISTEMA DE ACOPLAMIENTO DE IMPEDANCIAS
Figura 2.18: Circuito para generar las funciones de membresia tipo S y Z
Por lo tanto, si hacemos que la corriente de salida del multiplicador sea la diferencia
de 2.6 y 2.7, tenemos que:
IO = IO1 − IO2 =IX IY2IB
(2.8)
La corriente de polarización IB puede ser usada para ajustar la ganancia del multi-
plicador, o bien para obtener la función de división. El rango de la corriente de entrada
del multiplicador es:
2.3. SISTEMA IMPLEMENTADO 39
Figura 2.19: Circuito para generar la función de membresia triangular
40 CAPÍTULO 2. SISTEMA DE ACOPLAMIENTO DE IMPEDANCIAS
Figura 2.20: Forma y distribución de las funciones de membresia
|IX |+ |IY | ≤ 4IB (2.9)
Para obtener la diferencia de las dos corrientes de salida solo se necesita reflejar, a
través de un espejo tipo P, la corriente IO1 hacia la rama donde circula la corriente IO2
y de este mismo nodo se toma la corriente de salida IO.
Por otro lado, y debido a la dificultad en el diseño de circuitos divisores en modo
corriente, y al pobre desempeño que estos pueden mostrar, el controlador propuesto
fué modificado para evitar el uso de un divisor y poner un circuito normalizador en su
lugar. Este cambio no afecta el desempeño del controlador y reduce significativamente
el esfuerzo de diseño del circuito. La Figura 2.21 muestra la estructura del controlador
difuso con el circuito normalizador. Este circuito esta basado en el circuito translineal
BJT (Bipolar Junction Transistor) propuesto por Gilbert [B.90]. Dentro de las ventajas
de esta topología son que no existen lazos globales de retroalimentación, por lo tanto,
su respuesta dinámica es mucho mejor que la topología con el divisor, pero al igual
2.3. SISTEMA IMPLEMENTADO 41
que esta última, la topología con normalizadores presenta una programación de los
singleton transparente.
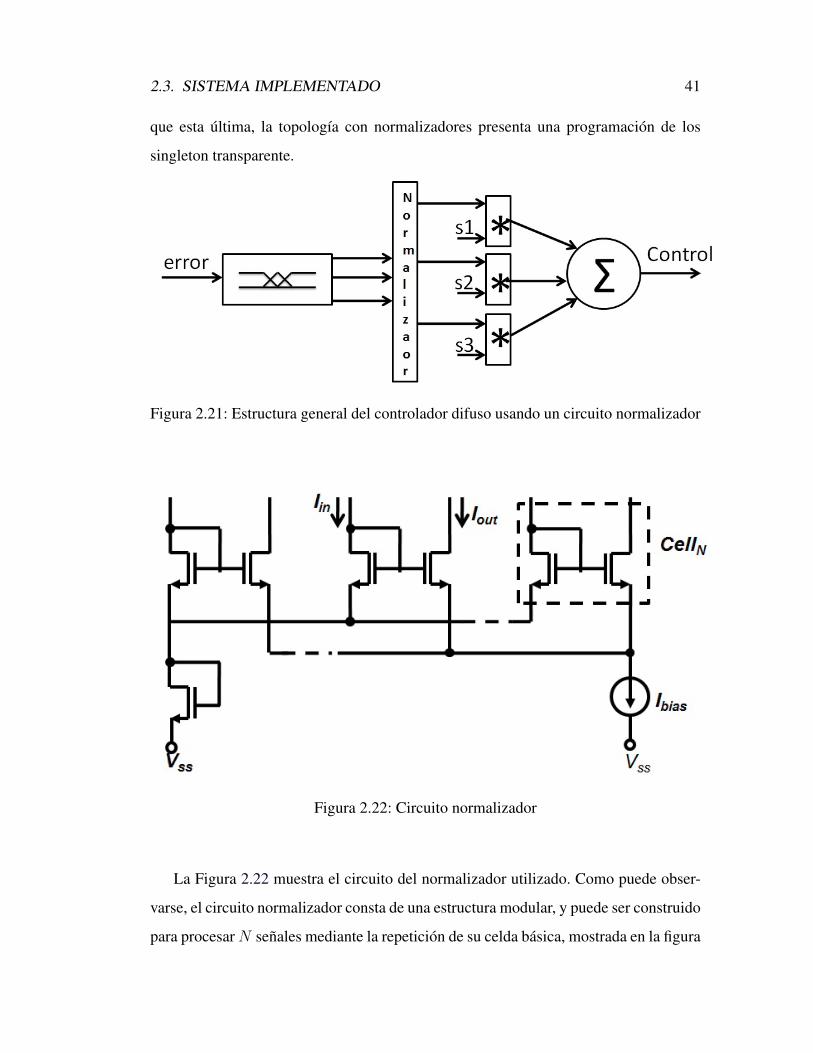
Figura 2.21: Estructura general del controlador difuso usando un circuito normalizador
Figura 2.22: Circuito normalizador
La Figura 2.22 muestra el circuito del normalizador utilizado. Como puede obser-
varse, el circuito normalizador consta de una estructura modular, y puede ser construido
para procesarN señales mediante la repetición de su celda básica, mostrada en la figura
42 CAPÍTULO 2. SISTEMA DE ACOPLAMIENTO DE IMPEDANCIAS
como CeldaN . La señal de entrada para cada celda, proviene de la etapa de inferencia
difusa del controlador, la corriente de salida se obtiene en el drenador del otro transistor
de la celda. Los transistores que reciben la señal de entrada comparten un nodo común,
cuyo voltaje está fijado por medio de un transistor conectado como diodo; los transis-
tores que entregan la señal de salida, se conectan en un punto de suma de corrientes,
cuyo valor esta dado por la corriente de polarización Ibias. El circuito normalizador
presenta las siguientes características:
1. La suma de todas las corrientes de salida es constante e igual al valor de Ibias
2. Para cada celda, la transformación entrada-salida es monotónica, esto es, a la
entrada más alta, le corresponde la salida más alta, manteniendo así el peso relativo
de cada antecedente. Por lo tanto, a pesar de que el circuito no realiza la función de
normalización ideal, éste mantiene las características esenciales y necesarias para el
proceso de defuzzyficación.
3. El circuito tiene una función de transferencia no lineal, lo cual no es un problema
debido a que el controlador difuso completo es altamente no lineal.
4. El normalizador tiene un esquema modular, debido a que se puede hacer N ré-
plicas de la celda básica por cada par entrada-salida, y solamente se debe agregar un
circuito común formado por el transistor MNA y la fuente de corriente ISS .
El circuito tiene tres principales fuentes de error sistemático:
a) La impedancia finita de Ibias, lo cual se puede disminuir realizando la fuente con
espejos de tipo cascode.
b) El desacoplo de los voltajes en los nodos de entrada. Este error puede reducirse
al usar transistores tipo P en la etapa anterior.
c) El desacoplo de voltajes en corriente directa (DC) de los nodos de entrada y
salida, el cual se puede atenuar utilizando transistores cascode.
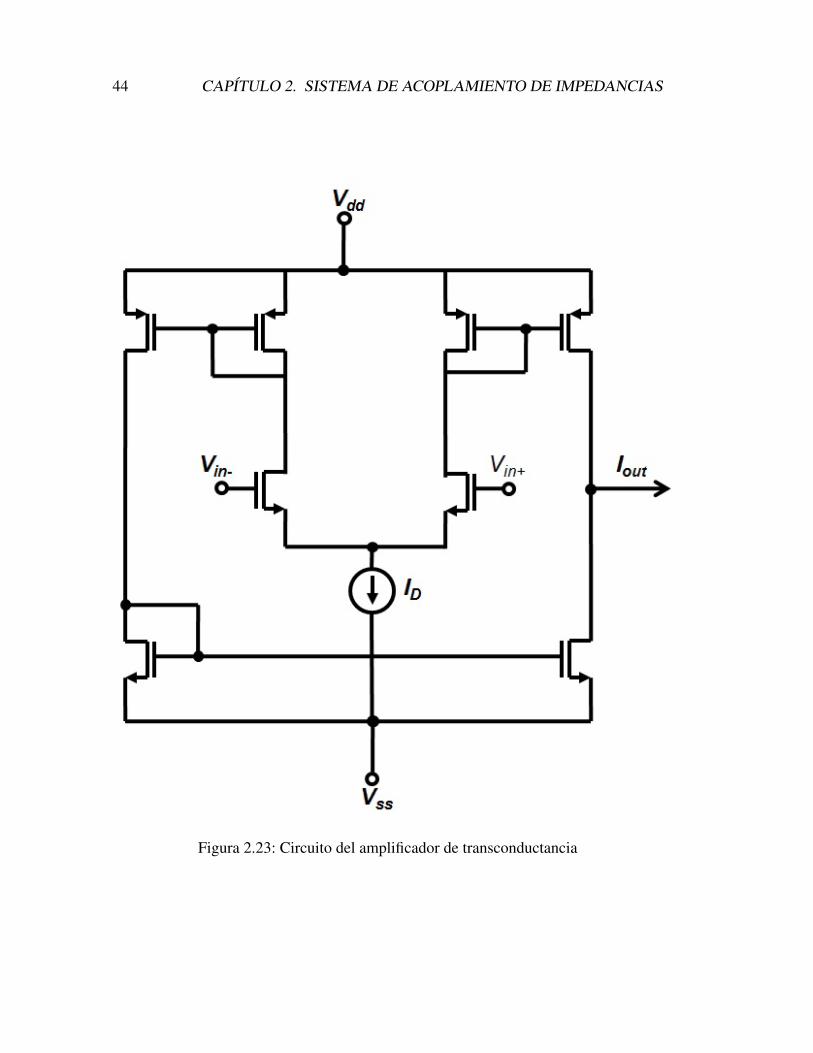
Finalmente para convertir la señal de salida en modo corriente del controlador di-
fuso a una señal de control en modo voltaje se utiliza un amplificador de transconduc-
tancia (OTA). La figura 2.23 muestra la estructura básica del OTA utilizado, como se
puede observar es un OTA simétrico, debido a que presenta una relativa facilidad de
2.3. SISTEMA IMPLEMENTADO 43
diseño y no es necesario compensarlo con técnicas como la del capacitor Miller.
La ecuación característica de un amplificador de transconductancia esta dada por:
IO = gm(Vin+ − Vin−) (2.10)
donde IO es la corriente de salida del OTA, Vin+ y Vin− son los voltajes en las terminales
de entrada positiva y negativa respectivamente, y gm es la transconductancia del am-
plificador, la cual depende directamente de la transconductancia del par diferencial de
entrada. Como se mencionó anteriormente, entre las ventajas de este OTA estan su di-
seño relativamente fácil, su simplicidad y uso de poca área, su ganancia (gm) es mucho
mas baja que un amplificador operacional de dos etapas, tiene un solo polo dominante,
el cual esta dado por la capacitancia de carga en el nodo de alta impedancia (nodo de
salida), por lo cual tampoco necesita ser compensado con redes RC.
La red de acoplamiento
Las tres principales redes de acoplamiento más ampliamente utilizadas son: tipo L,
tipo T y tipo PI, mostradas respectivamente en las figuras 2.2, 2.3, 2.4, dondeRS+jXS
es la impedancia de la fuente, RL + jXL es la impedancia de la carga y Rn + jXn es la
impedancia correspondiente al elemento n de la red, cada uno de los cuales puede ser
un elemento capacitivo o inductivo. Cada una de las redes tiene ventajas, desventajas y
campos de aplicación bien definidos [UAP11]. Como se comprobó en la sección ante-
rior, la red de acoplamiento que mostró un mejor desempeño fué la red tipo PI. Además
de un desempeño superior en el acoplamiento adaptable de impedancias, la red tipo PI
ofrece una ventaja sobre las otras dos: es posible usar más de un elemento variable,
esto permite adaptar dos parámetros de la red como la impedancia y la frecuencia de
resonancia [SP11].
La red tipo PI mostrada en la figura 2.4 se utilizó configurando el primer elemento,
R1 + jX1, como un elemento capacitivo constante, el segundo, R2 + jX2, como un
elemento inductivo también constante y el tercero, R3 + jX3, como un elemento ca-
44 CAPÍTULO 2. SISTEMA DE ACOPLAMIENTO DE IMPEDANCIAS
Figura 2.23: Circuito del amplificador de transconductancia
2.3. SISTEMA IMPLEMENTADO 45
pacitivo variable. Considerando una impedancia parásita de fuente típica de 50Ω, una
impedancia de carga de 25 + j43,33Ω y una frecuencia de operación a 2.4GHz, los
valores de los elementos de la red de acoplamiento pueden ser calculados usango teoría
de circuitos básica: CS = 3,97pF , L = 2,43nH , CL = 4,05pF . Es claro que la red de
acoplamiento puede acoplar un rango de impedancias a diferentes frecuencias. Desde
el punto de vista de diseño, es esencial conocer la región de operación de la red de
acoplamiento, es decir, cual es el ra rango de impedancias se pueden adaptar usando la
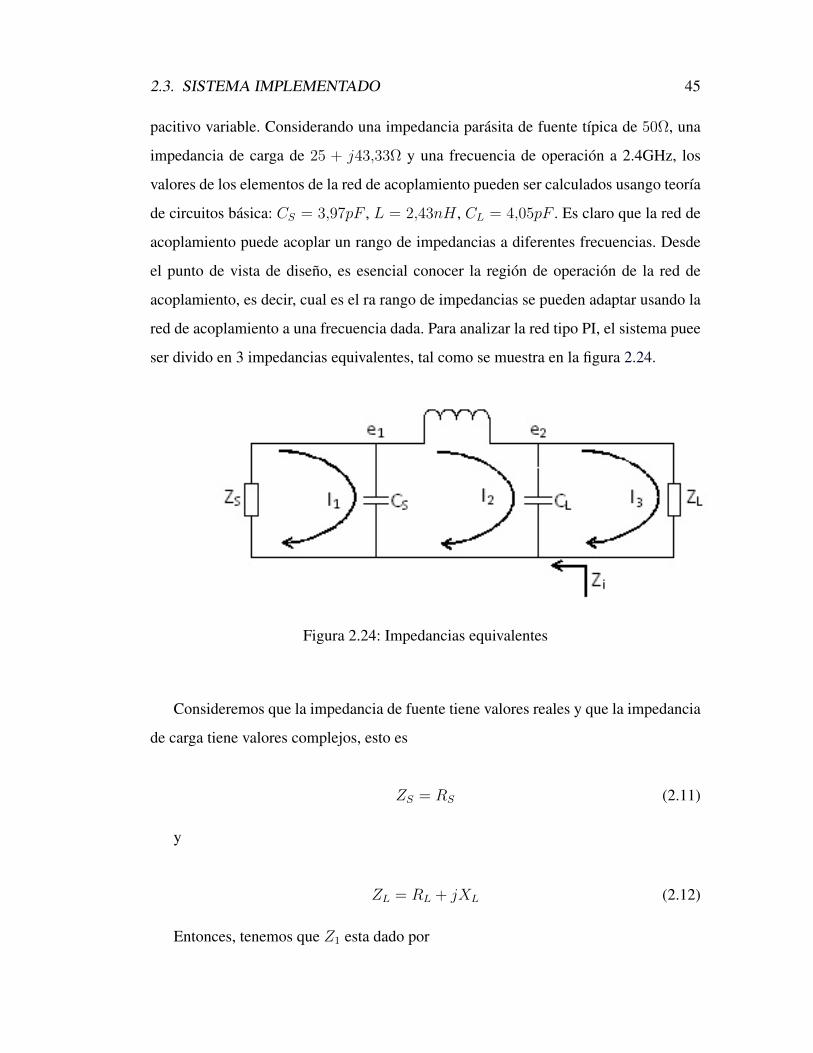
red de acoplamiento a una frecuencia dada. Para analizar la red tipo PI, el sistema puee
ser divido en 3 impedancias equivalentes, tal como se muestra en la figura 2.24.
Figura 2.24: Impedancias equivalentes
Consideremos que la impedancia de fuente tiene valores reales y que la impedancia
de carga tiene valores complejos, esto es
ZS = RS (2.11)
y
ZL = RL + jXL (2.12)
Entonces, tenemos que Z1 esta dado por
46 CAPÍTULO 2. SISTEMA DE ACOPLAMIENTO DE IMPEDANCIAS
Z1 =(RS)(− j
wCS)
RS − ( jwCS
)=RS − jwCSR2
S
1 + (wCSRS)2=
RS
1 + (wCSRS)2−j wCSR
2S
1 + (wCSRS)2= R1+jX1
(2.13)
de la ecuación anterior es claro que
R1 =RS
1 + (wCSRS)2, X1 =
wCSR2S
1 + (wCSRS)2(2.14)
diviendo la expresión para X1 entre R1, se obtiene la siguiente ecuación para CS
CS = − X1
wR1RS)(2.15)
substituyendo CS en la ecuación de Z1 da como resultado la siguiente función cir-
cular
X21 + (R1 −
RX
2)2 = (
RS
2)2 (2.16)
La interpretación de 2.16 es como sigue: CS genera un rango de impedancias Z1,
el cual cae dentro de un círculo de radio RS/2 y está centrado en (RS/2, 0). El efecto
del capacitor variable CL es delimitar este círculo a un arco acotado por los valores
máximos y mínimos del varactor. Finalmente, el efecto del inductor L es simplemente
desplazar este arco por un componente complejo jwL, en consecuencia la impedan-
cia resultante será un arco desplazado por un término imaginario dentro de la región
acotada por los valores del varactor.
2.4. Discusión del capítulo
En este capítulo se presentan tres propuestas de solución al problema de desacoplo
de impedancias: controlador difuso, interpolador signo-signo e interpolador sigmoidal.
Un análisis de los resultados obtenidos de Matlab demostró que el controlador difuso
2.4. DISCUSIÓN DEL CAPÍTULO 47
tiene el mejor desempeño al presentar una velocidad de convergencia dos veces mayor
al interpolador signo-signo y tres veces mayor al interpolador sigmoidal.
Se analizaron las tres configuraciones típicas de la red de acoplamiento: tipo L, tipo
T, y tipo PI. Los resultados mostraron que la red tipo PI permite una adptación más
veloz de la impedancia de carga comparada con las otras dos redes. Otra característica
que hace más atractivo el uso de la red tipo PI para acoplar las impedancias es que, se
puede usar el segundo capacitor como otro capacitor variable y de ésta manera tener dos
grados de libertad en el proceso de adaptación. Esto permite que, mientras la variación
de un capacitor permite el acoplamiento de impedancias de la red, la variación del
segundo capacitor permitiría al sistema modificar otro parámetro como, por ejemplo,
la frecuencia de resonancia de la red, ésto puede ser de utilidad en sistemas donde la
frecuencia de la señal no sea constante.
También se analizó la propuesta implementada basada en el controlador difuso y
la red tipo PI. Se detallaron los bloques electrónicos de construcción para la imple-
mentación del sistema completo y se hizo un análisis del rango de valores de impedan-
cias que pueden ser adaptados con la configuración propuesta.

Capítulo 3
Estabilidad
En este capítulo se hace un análisis matemático del sistema de acoplamiento de impedan-
cias para comprobar su estabilidad.
3.1. Estabilidad en los sistemas de control difuso
Representación matemática de controladores difusos
La estabilidad es uno de los temas más importantes en teoría de control. Se han
propuesto muchos trabajos basados en la publicación de Tanaka y Sugeno [TS92a]
para comprobar la estabilidad de los sistemas de control difusos. En [Lam11] Lam
investiga la estabilidad de sistemas de control basados en lógica difusa en los cuales las
funciones de membresía son representadas por funciones de tipo escalera. Pan presenta
en [TS92a] una solución local para evitar algunas de las condiciones no viables en
en el paradigma de la estabilidad global en los modelos Takagi-Sugeno no lineales de
tiempo continuo. Por su parte, Huaguang propone en [Zha11] un nuevo tipo de control
retroalimentado para ralajar las condiciones de estabilidad de los sistemas difusos de
tipo Takagi-Sugeno.El trabajo de Tanaka y Sugeno [TS92a] estableció la condición
suficiente para la estabilidad asintótica de un sistema difuso a través de la existencia de
49
50 CAPÍTULO 3. ESTABILIDAD
un función común de Lyapunov para todos los subsistemas.
Sea x(k) = [x1(k)...xn(k)]T donde x1(k)...xn(k) son las variables de estado del
sistema al instante de tiempo k. Entonces cualquier sistema difuso puede ser definido
mediante:
Ri = IF (x1(k) es Si1, AND...AND xn(k) es Sin)THEN x(k + 1) = Aix(k) (3.1)
para i = 1...N . Donde Slj es el conjunto difuso correspondiente a la variable de estado
xj y a la regla Rl, Ai ∈ Rnxn, i = 1...N son las matrices características del sistema.
El grado de verdad de la regla Ri en el instante de tiempo k, denotado por wi(k) es
definido como
wi(k) = ∧(µsi1(x1(k)), ..., µsin(xn))) (3.2)
donde µs(x) es el valor de la función de membresía del conjunto difuso S para la
entrada x y ∧ es un operador que satisface la condición
min(l1, ..., ln) ≥ ∧(l1, ..., ln) ≥ 0 (3.3)
donde el operador ∧ es usualmente el operador mínimo, el cual da el valor mínimo de
sus operandos. Entonces, en el instante de tiempo k el vector de estado es actualizado
como sigue
x(k + 1) =(ΣN
i=1wi(k)Aix(k))
ΣNi=1wi(k)
(3.4)
la cual puede ser re-escrita como
ΣNi=1αiAix(k); αi(k) =
wi(k)
ΣNi=1wi(k)
(3.5)
De la ecuacion anterior podemos darnos cuenta de que un sistema difuso puede ser

3.2. ESTABILIDAD 51
completamente representado por el conjunto de matrices característicasA = A1, ..., AN
y los conjuntos difusos Sij, l = 1, ..., N ; j = 1, ..., n.
Linear Matrix Inequality (LMI)
El uso de LMI en el análisis de sistemas dinámicos inicia cuando Lyapunov de-
mostró que la ecuación diferencial
d
dtx(t) = Ax(t) (3.6)
es estable (es decir, todas las trayectorias convergen a cero) si y solo si existe una matriz
definida positiva P tal que
ATP + PA < 0 (3.7)
El requisito P > 0, ATP + PA < 0 es un caso especial de un problema LMI y es
llamado inecuación de Lyapunov.
Lyapunov demostró que si seleccionamos cualquier matriz que satisfagaQ = QT >
0 y se resuelve la ecuacion lineal ATP + PA = −Q para la matriz P, ésta será una
matriz definida positiva si y solo si el sistema es estable. Lyapunov también probó que
el problema LMI 3.7 es factible si y solo si la matriz A es estable, esto es, todas las
trayectorias de x = Ax convergen a cero conforme t→∞, ó equivalentemente, todos
los eigenvalores de A deben tener parte real negativa. Para resolver este problema LMI,
se selecciona cualquier Q > 0 y se resuelve la equación de Lyapunov ATP + PA =
−Q, la cual es un conjunto de n(n+1) ecuaciones lineales para las n(n+1)/2 variables
escalares de P . Este conjunto de ecuaciones lineales tienen solución y resultan en P >
0 si y solo si el problema LMI es factible.
3.2. Estabilidad
Las reglas de un sistema difuso tipo Takagi-Sugeno pueden ser expresadas como

52 CAPÍTULO 3. ESTABILIDAD
SI i1(t) es M1 y ... y ip(t) esMp
ENTONCES x(t) = Aix(t) +Biu(t),
i = 1, 2, ..., r
(3.8)
donde ij es la jth premisa, Mj es el jth conjunto difuso, x(t) es el vector de estado,
u(t) es el vector de entrada, Aj y Bj son las matrices del sistema, y r es el número de
reglas.
Dado el par (x(t), u(t)), la salida del controlador difuso esta dada por:
x(t) =
r∑i=1
w(i(t)) Aix(t) +Biu(t)
r∑i=1
wi(i(t))
(3.9)
donde
wi(i(t)) =
p∏j=1
Mj(ij(t)) (3.10)
para todo instante t.
Una condición suficiente para asegurar la estabilidad está dada como sigue
Teorema 1 [TS92b]: El equilibrio de un sistema difuso lineal variante en el tiempo
es asintóticamente estable si existe una matriz positiva definida P tal que
ATi PAi − P < 0, i = 1, 2, ..., r (3.11)
esto es, una matriz común P tiene que existir para todos los subsistemas.
Para obtener el modelo de estados del sistema de acoplamiento de impedancias, la
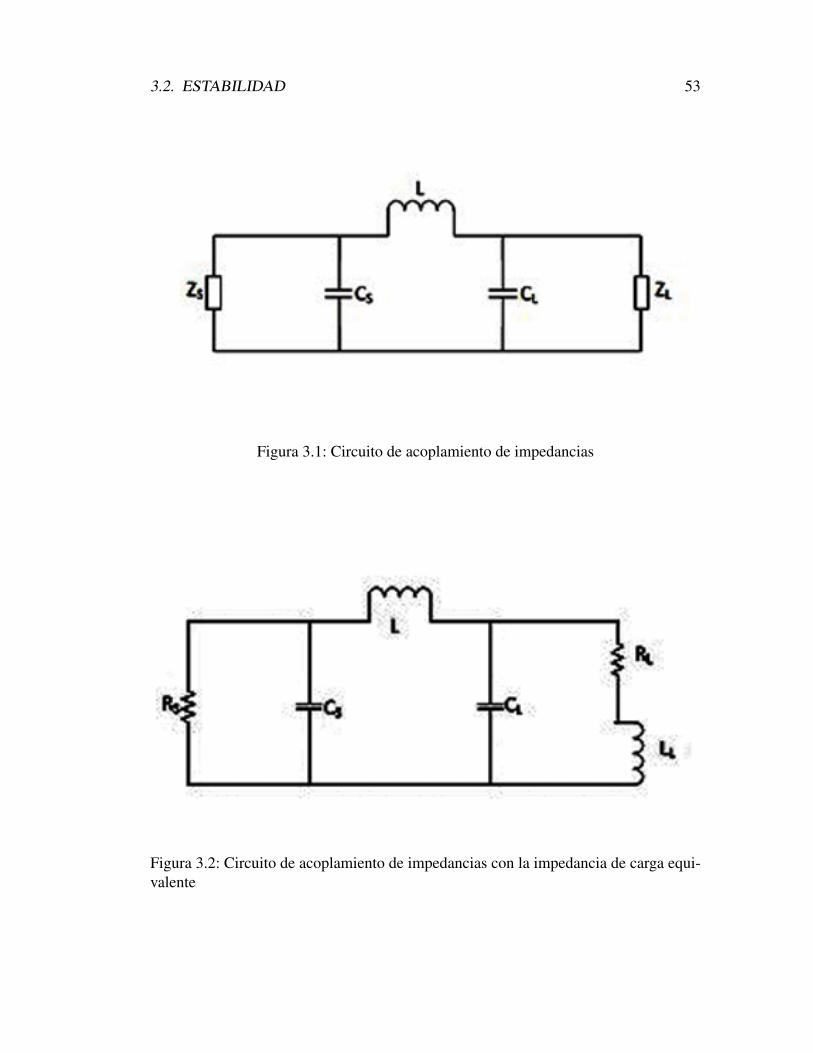
3.2. ESTABILIDAD 53
Figura 3.1: Circuito de acoplamiento de impedancias
Figura 3.2: Circuito de acoplamiento de impedancias con la impedancia de carga equi-valente

54 CAPÍTULO 3. ESTABILIDAD
ecuación 3.1 puede ser modificada como se muestra en la figura 3.2. Debido a que la
impedancia de carga puede ser compleja en el caso general, ésta puede ser representada
por
ZL = RL + jXL (3.12)
donde RL y XLson la resistencia y reactancia de carga respectivamente.
Basado en el circuito de la figura 3.2 y considerando el voltaje de los capacitores
CL CS y la corriente fluyendo en los inductores L y LL como variables de estado, el
modelo del sistema es
x1
x2
x3
x4
=
1
RsCs− 1Cs
0 0
1L
0 − 1L
0
0 1CL
0 − 1CL
0 0 1LL
−RL
LL
x1
x2
x3
x4
(3.13)
Ahora, si consideramos que la impedancia de la fuente tiene una impedancia de
50Ω , la impedancia de carga tiene el valor 25 + j43,33Ω, y la frecuencia de operación
es 2.4GHz, entonces el valor de los elementos de la red π puede ser calculado usando
conceptos básicos de teoría de circuitos:CS = 3,97pF , L = 2,43nH , CL = 4,05pF . Es
claro que el valor de los elementos de la impedancia de carga son RL = 25Ω and LL =
2,87nH . Debido a que el controlador difuso utilizado para acoplar las impedancias
tiene tres funciones de memebresía y una sola entrada, las reglas del sistema difuso
pueden ser expresadas como :
RULE1 : IF i(t) is M1 THEN x(t) = A1x(t)
RULE2 : IF i(t) is M2 THEN x(t) = A2x(t)
RULE3 : IF i(t) is M3 THEN x(t) = A3x(t)
(3.14)
donde M1, M2 y M3 son las funciones de membresía tipo T, S y triangular, y A1, A2 y

3.2. ESTABILIDAD 55
A3 estan dadas por:
A1 = 1× 1011
0,05 −2,51 0 0
0,004 0 −0,004 0
0 3,52 0 −3,52
0 0 0,003 −0,087
A2 = 1× 1011
0,05 −2,51 0 0
0,004 0 −0,004 0
0 2,464 0 −2,464
0 0 0,003 −0,087
A3 = 1× 1011
0,05 −2,51 0 0
0,004 0 −0,004 0
0 1,895 0 −1,895
0 0 0,003 −0,087
(3.15)
Las matrices A1, A2 y A3 son calculadas asumiendo que la señal de error en el
sistema puede tener tres valores: pequeño, mediano y grande. Resolviendo el problema
LMI dado por la ecuación 3.11 obtenemos que la matriz común P esta dada por
P = 1× 10−12
3 −41 −2 27
−41 4497 −54 −1192
−20 −54 6 −76
27 −1192 −76 3209
(3.16)
La matriz positiva definida P satisface la condición de estabilidad dada por el Teore-
ma 1. En otras palabras, el sistema difuso de control en lazo cerrado es asintóticamente
estable.
56 CAPÍTULO 3. ESTABILIDAD
3.3. Discusión del capítulo
En este capítulo se comprobó la estabilidad del sistema. Para ello, se obtuvo el
modelo de estado del sistema de acoplamiento de impedancias utilizando impedancias
equivalentes. Una vez obtenido el modelo, se resuelvió un problema LMI para com-
probar que el sistema es estable al obtener una matriz positiva definida que satisfizo la
inequación de Lyapunov.
Capítulo 4
Resultados
En este capítulo se presentan los resultados obtenidos para el acoplamiento adap-
table de impedancias y se detalla el desempeño de los bloques electrónicos que lo
conforman.
4.1. Caracterización de los bloques electrónicos
En esta sección se presentan los resultados obtenidos de simulaciones post-layout
para la caracterización de los circuitos que se diseñaron.
Controlador difuso
1. Funciones de membresía. Uno de los principales problemas en el diseño de cir-
cuitos analógicos es la poca, ó nula, flexibilidad que presentan para poder modificar
sus parámetros. Pocas propuestas existen para la realización de circuitos analógicos
programables. En el caso de los controladores difusos integrados la programabilidad
de sus parámetros es una característica muy importante que permite un entonado fuera
de chip para ajustar posibles desviaciones de su comportamiento esperado debido a
variaciones en el proceso de fabricación.
57
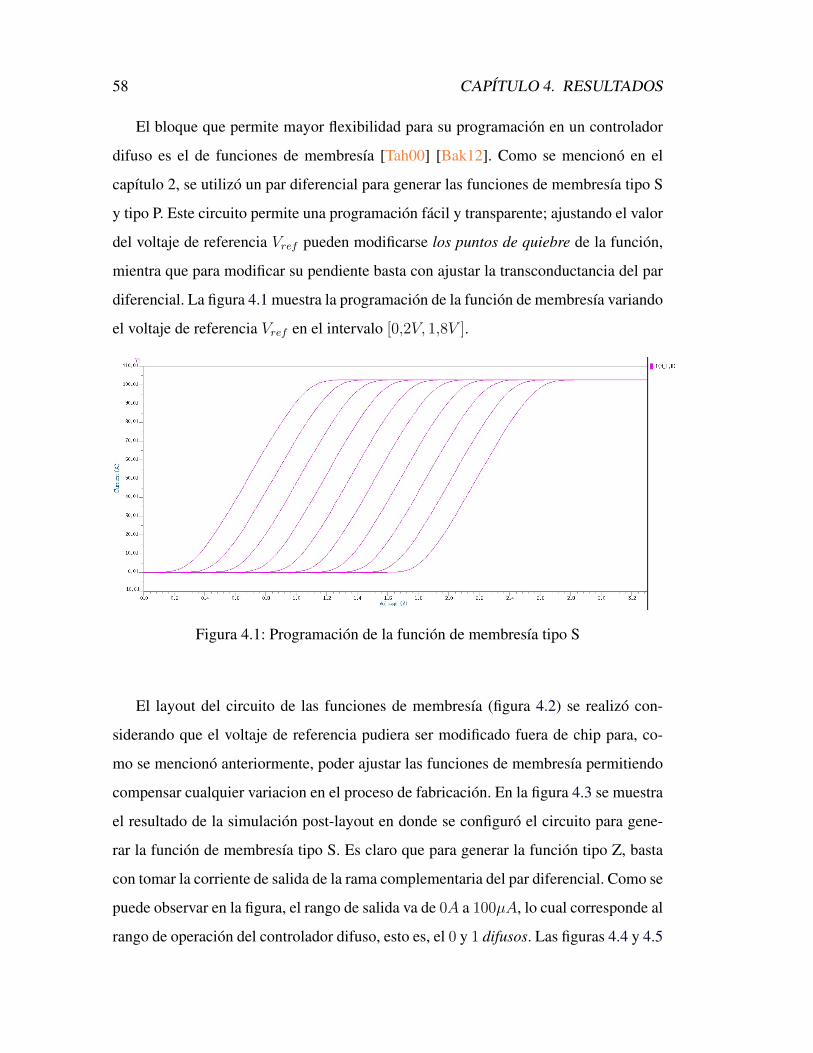
58 CAPÍTULO 4. RESULTADOS
El bloque que permite mayor flexibilidad para su programación en un controlador
difuso es el de funciones de membresía [Tah00] [Bak12]. Como se mencionó en el
capítulo 2, se utilizó un par diferencial para generar las funciones de membresía tipo S
y tipo P. Este circuito permite una programación fácil y transparente; ajustando el valor
del voltaje de referencia Vref pueden modificarse los puntos de quiebre de la función,
mientra que para modificar su pendiente basta con ajustar la transconductancia del par
diferencial. La figura 4.1 muestra la programación de la función de membresía variando
el voltaje de referencia Vref en el intervalo [0,2V, 1,8V ].
Figura 4.1: Programación de la función de membresía tipo S
El layout del circuito de las funciones de membresía (figura 4.2) se realizó con-
siderando que el voltaje de referencia pudiera ser modificado fuera de chip para, co-
mo se mencionó anteriormente, poder ajustar las funciones de membresía permitiendo
compensar cualquier variacion en el proceso de fabricación. En la figura 4.3 se muestra
el resultado de la simulación post-layout en donde se configuró el circuito para gene-
rar la función de membresía tipo S. Es claro que para generar la función tipo Z, basta
con tomar la corriente de salida de la rama complementaria del par diferencial. Como se
puede observar en la figura, el rango de salida va de 0A a 100µA, lo cual corresponde al
rango de operación del controlador difuso, esto es, el 0 y 1 difusos. Las figuras 4.4 y 4.5
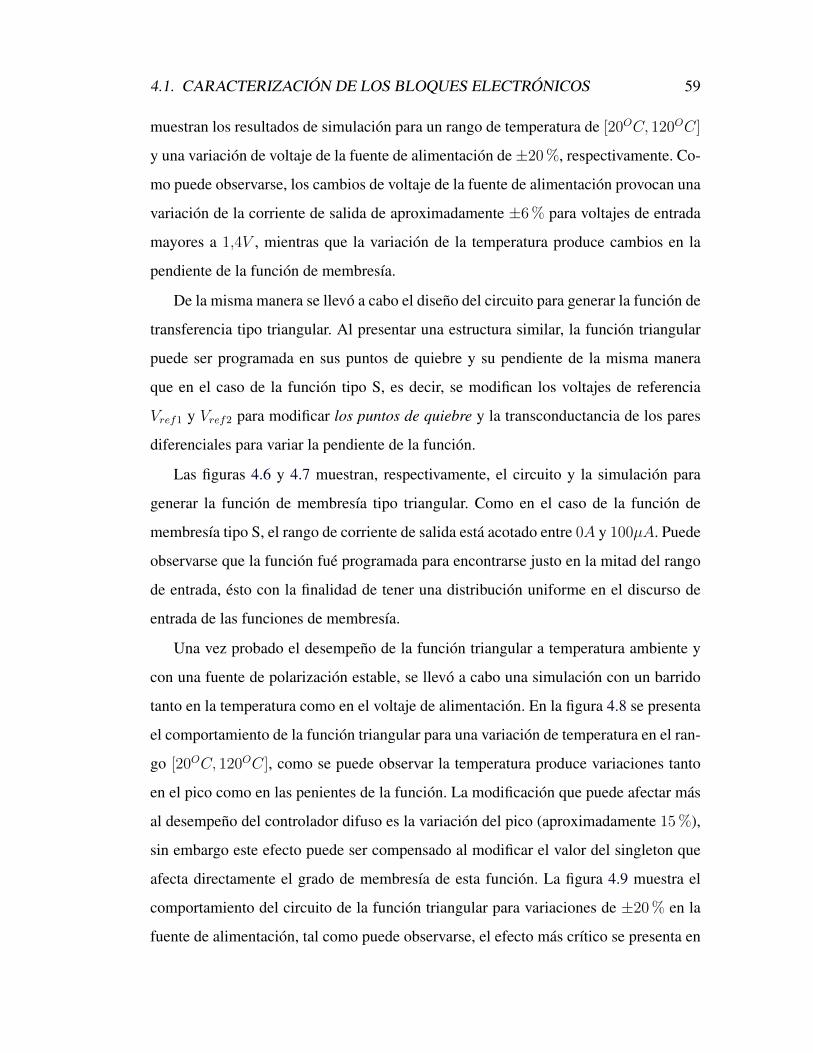
4.1. CARACTERIZACIÓN DE LOS BLOQUES ELECTRÓNICOS 59
muestran los resultados de simulación para un rango de temperatura de [20OC, 120OC]
y una variación de voltaje de la fuente de alimentación de±20 %, respectivamente. Co-
mo puede observarse, los cambios de voltaje de la fuente de alimentación provocan una
variación de la corriente de salida de aproximadamente ±6 % para voltajes de entrada
mayores a 1,4V , mientras que la variación de la temperatura produce cambios en la
pendiente de la función de membresía.
De la misma manera se llevó a cabo el diseño del circuito para generar la función de
transferencia tipo triangular. Al presentar una estructura similar, la función triangular
puede ser programada en sus puntos de quiebre y su pendiente de la misma manera
que en el caso de la función tipo S, es decir, se modifican los voltajes de referencia
Vref1 y Vref2 para modificar los puntos de quiebre y la transconductancia de los pares
diferenciales para variar la pendiente de la función.
Las figuras 4.6 y 4.7 muestran, respectivamente, el circuito y la simulación para
generar la función de membresía tipo triangular. Como en el caso de la función de
membresía tipo S, el rango de corriente de salida está acotado entre 0A y 100µA. Puede
observarse que la función fué programada para encontrarse justo en la mitad del rango
de entrada, ésto con la finalidad de tener una distribución uniforme en el discurso de
entrada de las funciones de membresía.
Una vez probado el desempeño de la función triangular a temperatura ambiente y
con una fuente de polarización estable, se llevó a cabo una simulación con un barrido
tanto en la temperatura como en el voltaje de alimentación. En la figura 4.8 se presenta
el comportamiento de la función triangular para una variación de temperatura en el ran-
go [20OC, 120OC], como se puede observar la temperatura produce variaciones tanto
en el pico como en las penientes de la función. La modificación que puede afectar más
al desempeño del controlador difuso es la variación del pico (aproximadamente 15 %),
sin embargo este efecto puede ser compensado al modificar el valor del singleton que
afecta directamente el grado de membresía de esta función. La figura 4.9 muestra el
comportamiento del circuito de la función triangular para variaciones de ±20 % en la
fuente de alimentación, tal como puede observarse, el efecto más crítico se presenta en
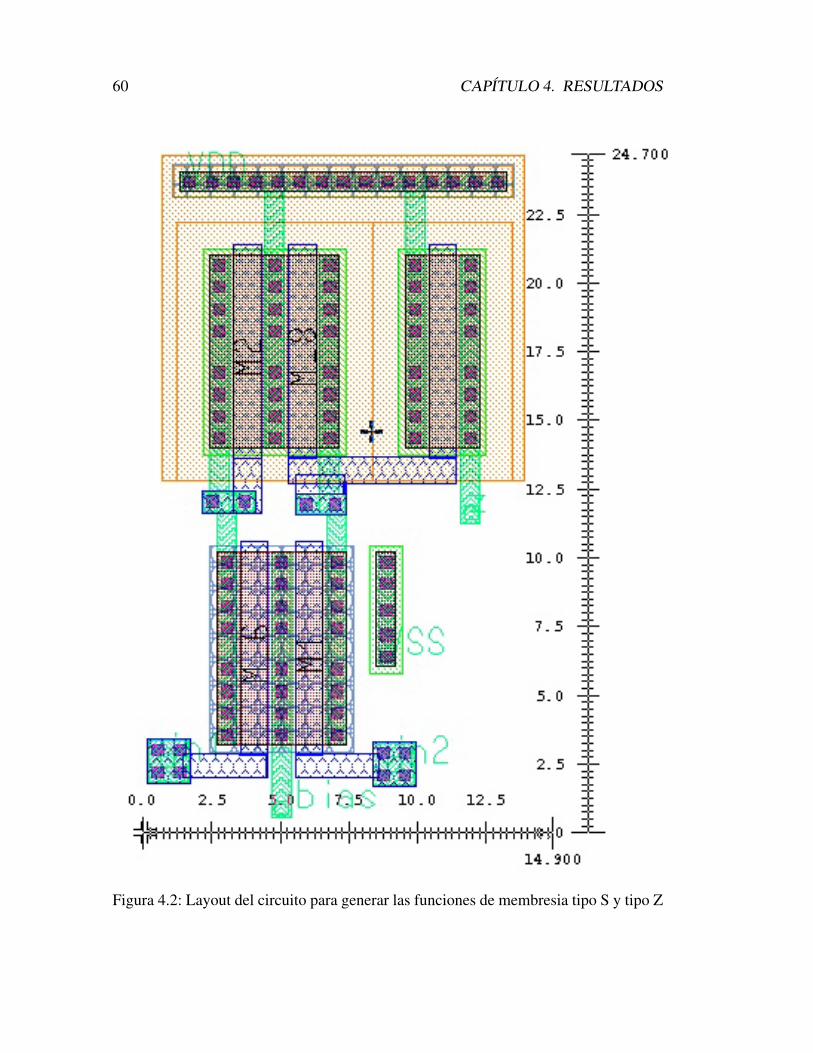
60 CAPÍTULO 4. RESULTADOS
Figura 4.2: Layout del circuito para generar las funciones de membresia tipo S y tipo Z
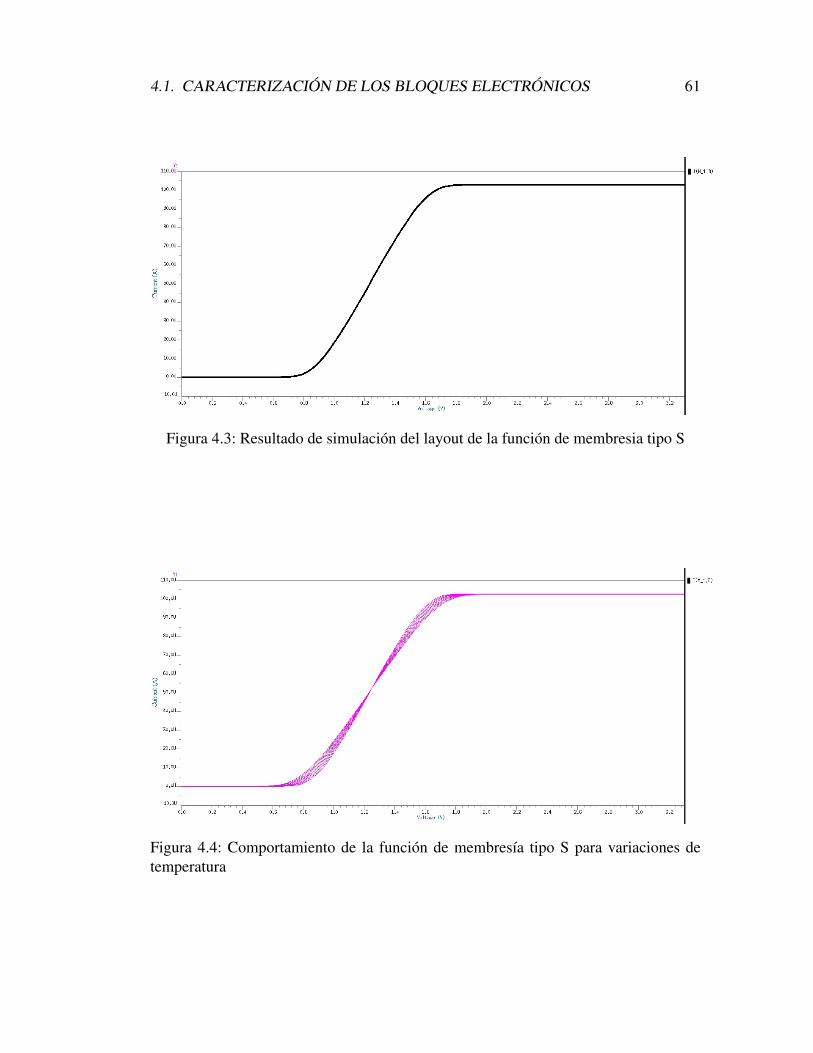
4.1. CARACTERIZACIÓN DE LOS BLOQUES ELECTRÓNICOS 61
Figura 4.3: Resultado de simulación del layout de la función de membresia tipo S
Figura 4.4: Comportamiento de la función de membresía tipo S para variaciones detemperatura
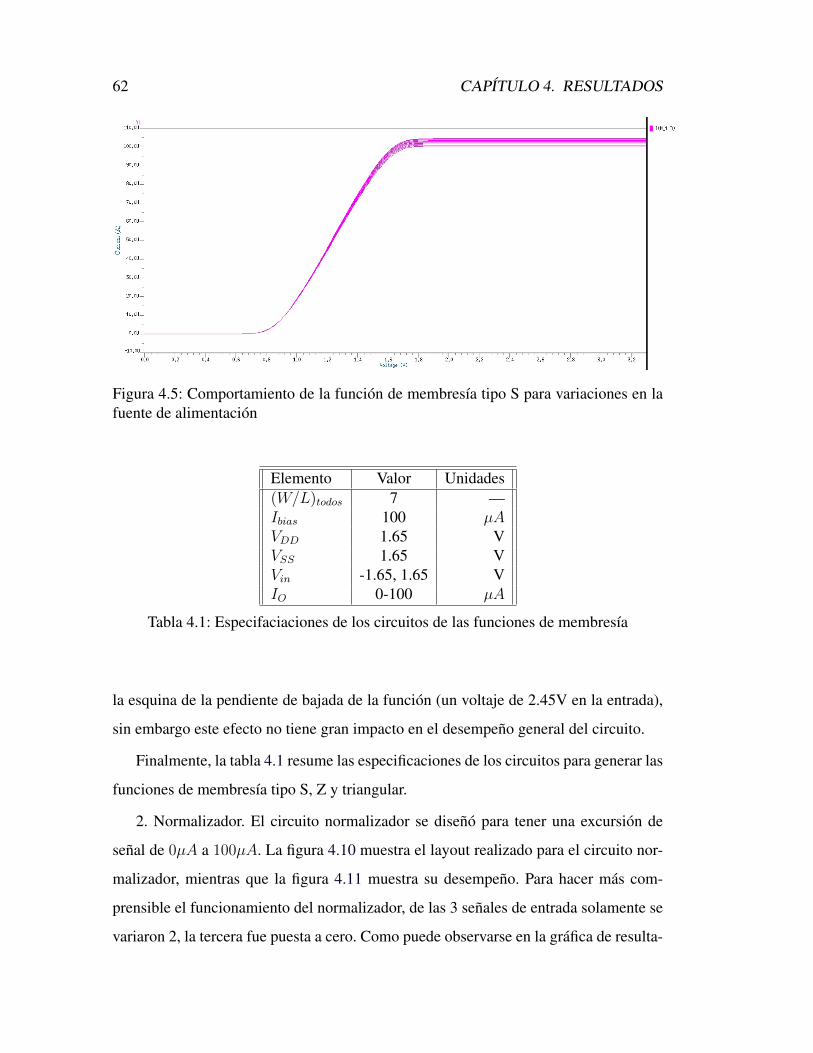
62 CAPÍTULO 4. RESULTADOS
Figura 4.5: Comportamiento de la función de membresía tipo S para variaciones en lafuente de alimentación
Elemento Valor Unidades(W/L)todos 7 —Ibias 100 µAVDD 1.65 VVSS 1.65 VVin -1.65, 1.65 VIO 0-100 µA
Tabla 4.1: Especifaciaciones de los circuitos de las funciones de membresía
la esquina de la pendiente de bajada de la función (un voltaje de 2.45V en la entrada),
sin embargo este efecto no tiene gran impacto en el desempeño general del circuito.
Finalmente, la tabla 4.1 resume las especificaciones de los circuitos para generar las
funciones de membresía tipo S, Z y triangular.
2. Normalizador. El circuito normalizador se diseñó para tener una excursión de
señal de 0µA a 100µA. La figura 4.10 muestra el layout realizado para el circuito nor-
malizador, mientras que la figura 4.11 muestra su desempeño. Para hacer más com-
prensible el funcionamiento del normalizador, de las 3 señales de entrada solamente se
variaron 2, la tercera fue puesta a cero. Como puede observarse en la gráfica de resulta-
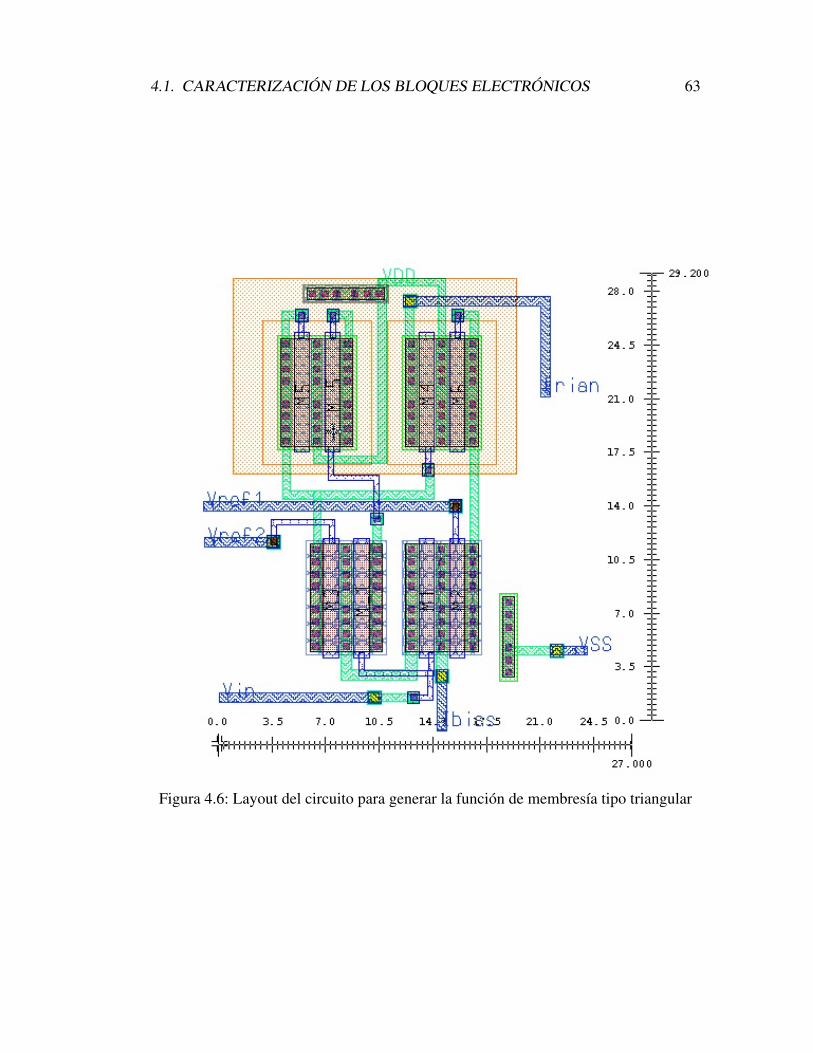
4.1. CARACTERIZACIÓN DE LOS BLOQUES ELECTRÓNICOS 63
Figura 4.6: Layout del circuito para generar la función de membresía tipo triangular
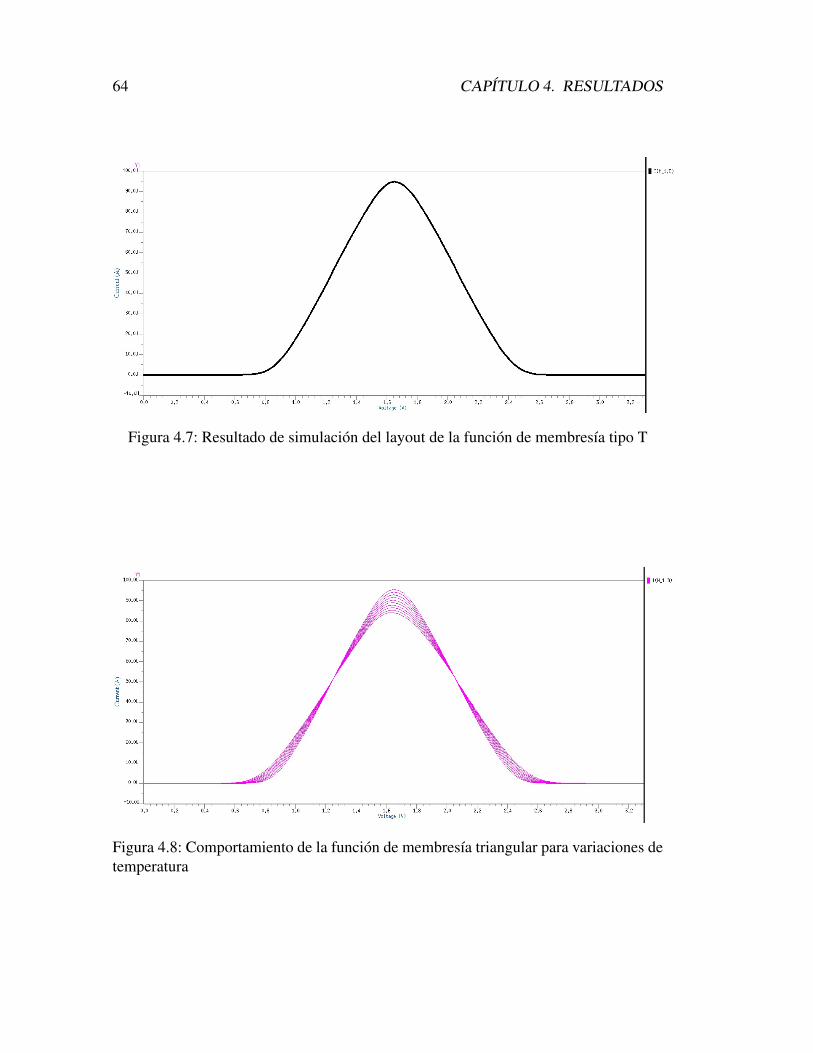
64 CAPÍTULO 4. RESULTADOS
Figura 4.7: Resultado de simulación del layout de la función de membresía tipo T
Figura 4.8: Comportamiento de la función de membresía triangular para variaciones detemperatura
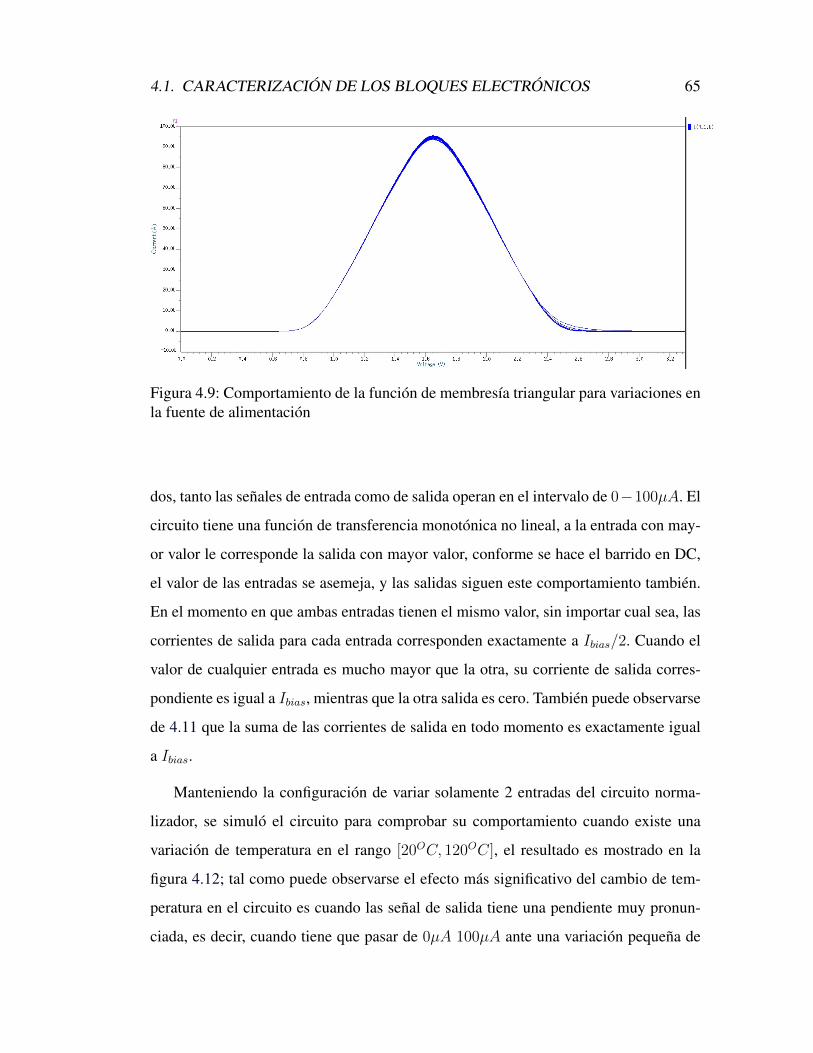
4.1. CARACTERIZACIÓN DE LOS BLOQUES ELECTRÓNICOS 65
Figura 4.9: Comportamiento de la función de membresía triangular para variaciones enla fuente de alimentación
dos, tanto las señales de entrada como de salida operan en el intervalo de 0−100µA. El
circuito tiene una función de transferencia monotónica no lineal, a la entrada con may-
or valor le corresponde la salida con mayor valor, conforme se hace el barrido en DC,
el valor de las entradas se asemeja, y las salidas siguen este comportamiento también.
En el momento en que ambas entradas tienen el mismo valor, sin importar cual sea, las
corrientes de salida para cada entrada corresponden exactamente a Ibias/2. Cuando el
valor de cualquier entrada es mucho mayor que la otra, su corriente de salida corres-
pondiente es igual a Ibias, mientras que la otra salida es cero. También puede observarse
de 4.11 que la suma de las corrientes de salida en todo momento es exactamente igual
a Ibias.
Manteniendo la configuración de variar solamente 2 entradas del circuito norma-
lizador, se simuló el circuito para comprobar su comportamiento cuando existe una
variación de temperatura en el rango [20OC, 120OC], el resultado es mostrado en la
figura 4.12; tal como puede observarse el efecto más significativo del cambio de tem-
peratura en el circuito es cuando las señal de salida tiene una pendiente muy pronun-
ciada, es decir, cuando tiene que pasar de 0µA 100µA ante una variación pequeña de
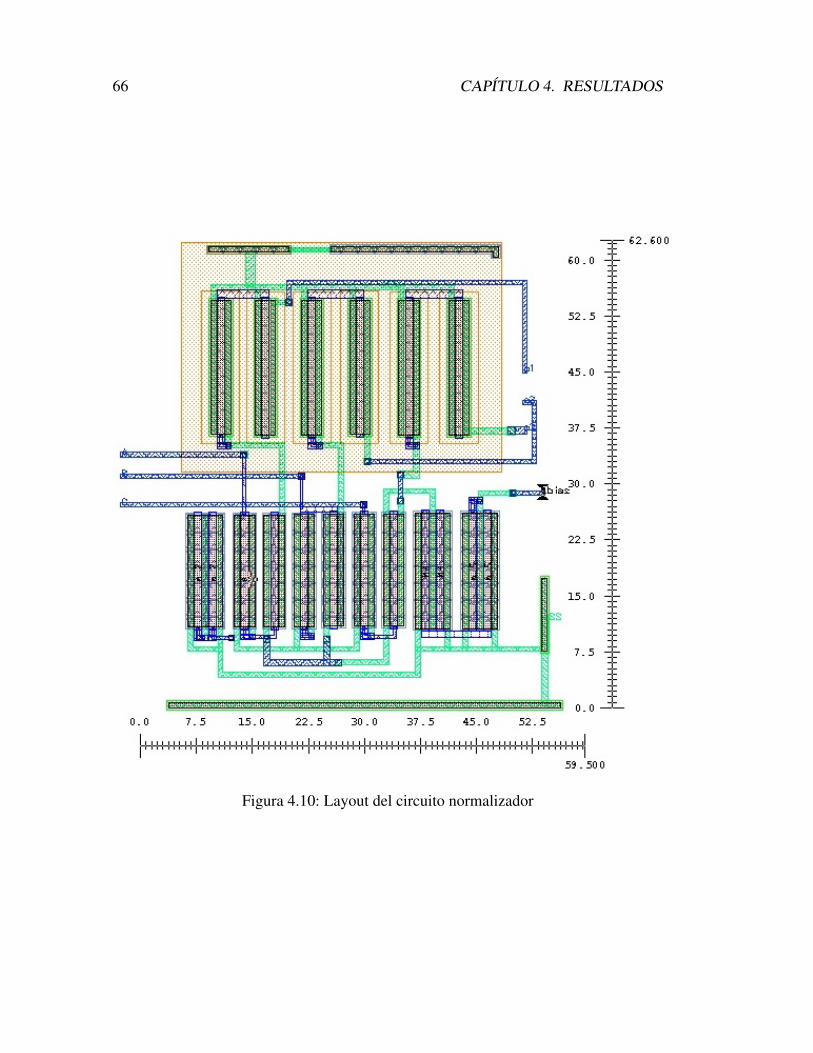
66 CAPÍTULO 4. RESULTADOS
Figura 4.10: Layout del circuito normalizador
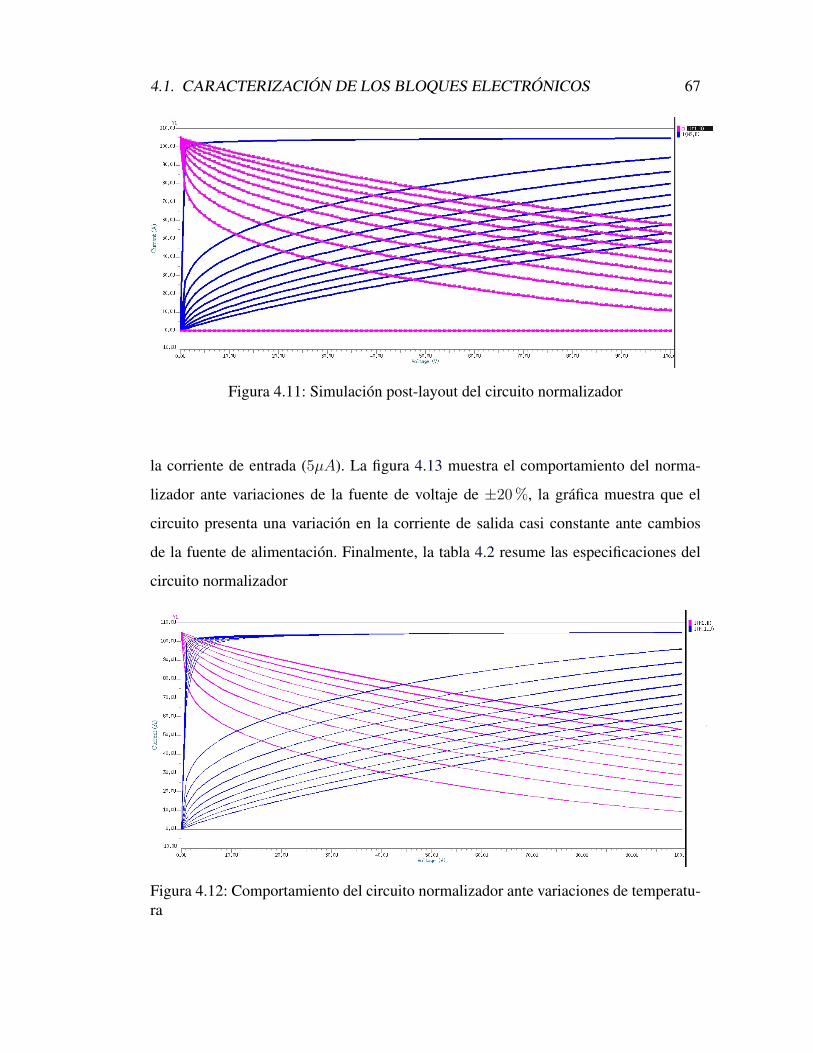
4.1. CARACTERIZACIÓN DE LOS BLOQUES ELECTRÓNICOS 67
Figura 4.11: Simulación post-layout del circuito normalizador
la corriente de entrada (5µA). La figura 4.13 muestra el comportamiento del norma-
lizador ante variaciones de la fuente de voltaje de ±20 %, la gráfica muestra que el
circuito presenta una variación en la corriente de salida casi constante ante cambios
de la fuente de alimentación. Finalmente, la tabla 4.2 resume las especificaciones del
circuito normalizador
Figura 4.12: Comportamiento del circuito normalizador ante variaciones de temperatu-ra
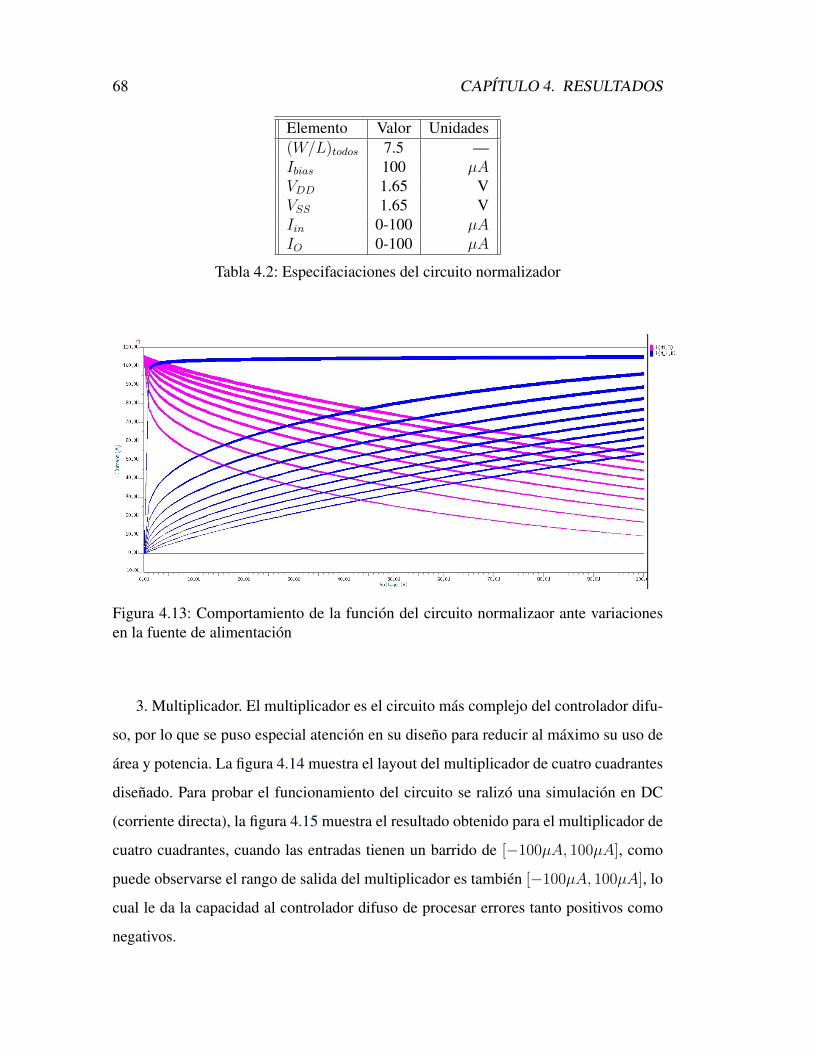
68 CAPÍTULO 4. RESULTADOS
Elemento Valor Unidades(W/L)todos 7.5 —Ibias 100 µAVDD 1.65 VVSS 1.65 VIin 0-100 µAIO 0-100 µA
Tabla 4.2: Especifaciaciones del circuito normalizador
Figura 4.13: Comportamiento de la función del circuito normalizaor ante variacionesen la fuente de alimentación
3. Multiplicador. El multiplicador es el circuito más complejo del controlador difu-
so, por lo que se puso especial atención en su diseño para reducir al máximo su uso de
área y potencia. La figura 4.14 muestra el layout del multiplicador de cuatro cuadrantes
diseñado. Para probar el funcionamiento del circuito se ralizó una simulación en DC
(corriente directa), la figura 4.15 muestra el resultado obtenido para el multiplicador de
cuatro cuadrantes, cuando las entradas tienen un barrido de [−100µA, 100µA], como
puede observarse el rango de salida del multiplicador es también [−100µA, 100µA], lo
cual le da la capacidad al controlador difuso de procesar errores tanto positivos como
negativos.
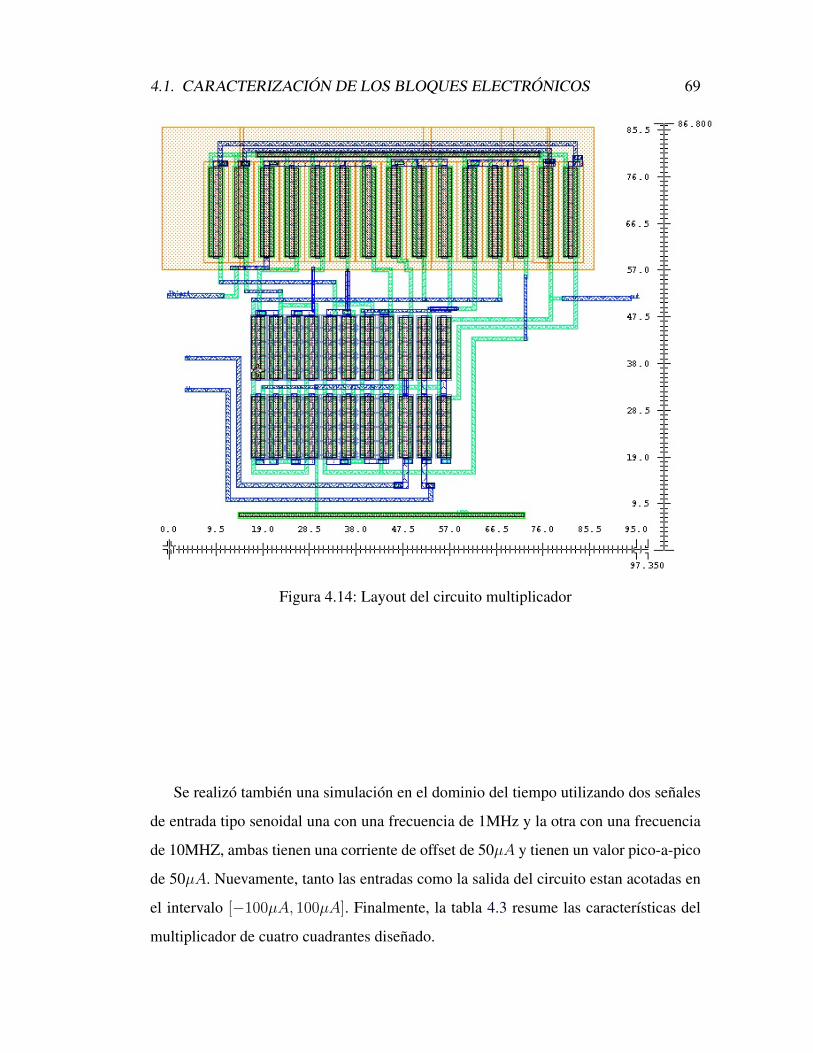
4.1. CARACTERIZACIÓN DE LOS BLOQUES ELECTRÓNICOS 69
Figura 4.14: Layout del circuito multiplicador
Se realizó también una simulación en el dominio del tiempo utilizando dos señales
de entrada tipo senoidal una con una frecuencia de 1MHz y la otra con una frecuencia
de 10MHZ, ambas tienen una corriente de offset de 50µA y tienen un valor pico-a-pico
de 50µA. Nuevamente, tanto las entradas como la salida del circuito estan acotadas en
el intervalo [−100µA, 100µA]. Finalmente, la tabla 4.3 resume las características del
multiplicador de cuatro cuadrantes diseñado.
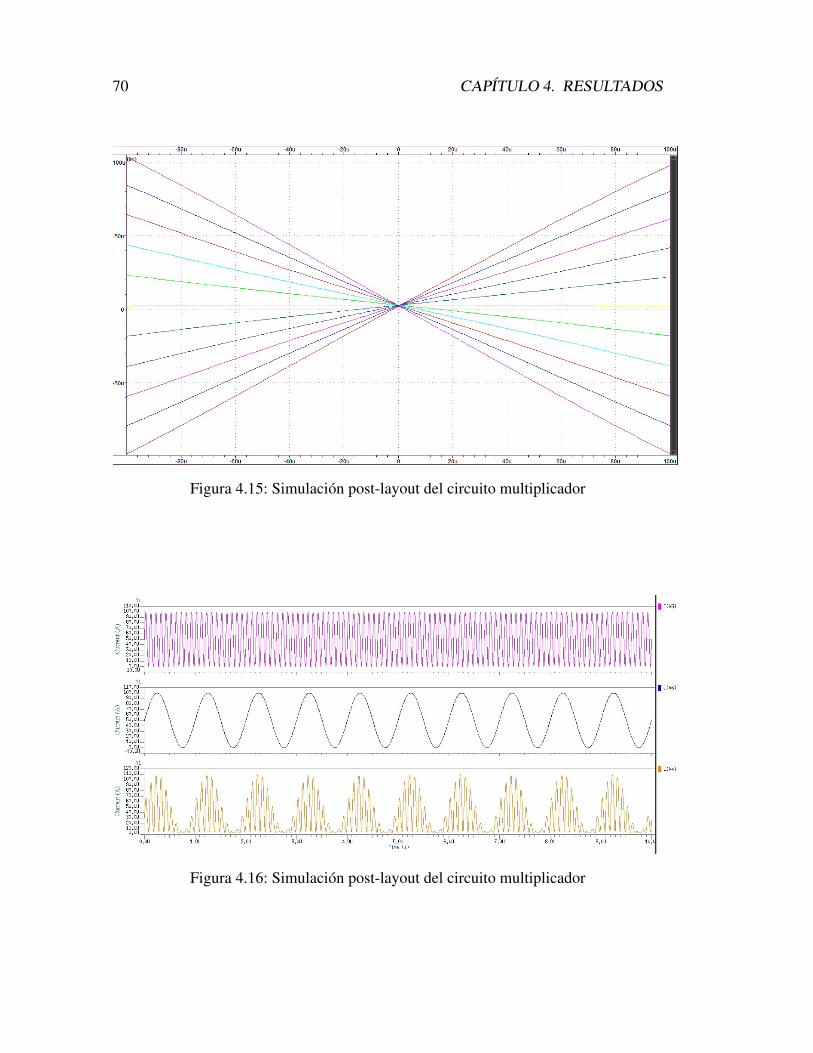
70 CAPÍTULO 4. RESULTADOS
Figura 4.15: Simulación post-layout del circuito multiplicador
Figura 4.16: Simulación post-layout del circuito multiplicador
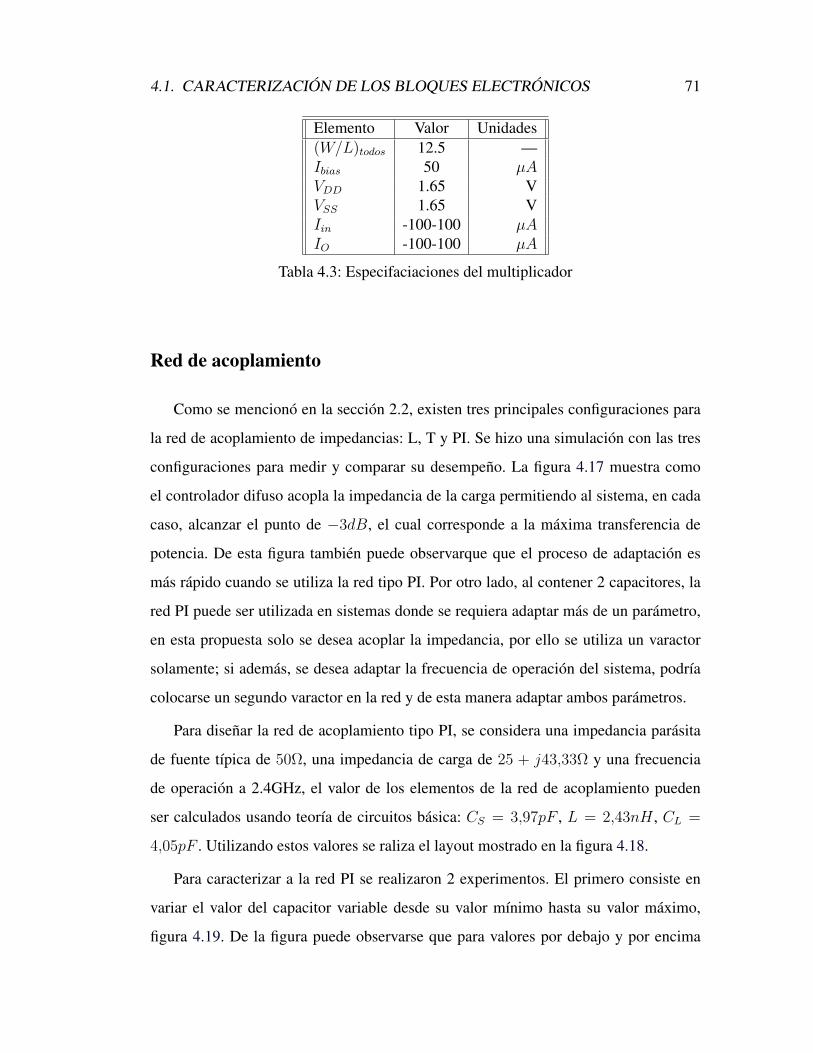
4.1. CARACTERIZACIÓN DE LOS BLOQUES ELECTRÓNICOS 71
Elemento Valor Unidades(W/L)todos 12.5 —Ibias 50 µAVDD 1.65 VVSS 1.65 VIin -100-100 µAIO -100-100 µA
Tabla 4.3: Especifaciaciones del multiplicador
Red de acoplamiento
Como se mencionó en la sección 2.2, existen tres principales configuraciones para
la red de acoplamiento de impedancias: L, T y PI. Se hizo una simulación con las tres
configuraciones para medir y comparar su desempeño. La figura 4.17 muestra como
el controlador difuso acopla la impedancia de la carga permitiendo al sistema, en cada
caso, alcanzar el punto de −3dB, el cual corresponde a la máxima transferencia de
potencia. De esta figura también puede observarque que el proceso de adaptación es
más rápido cuando se utiliza la red tipo PI. Por otro lado, al contener 2 capacitores, la
red PI puede ser utilizada en sistemas donde se requiera adaptar más de un parámetro,
en esta propuesta solo se desea acoplar la impedancia, por ello se utiliza un varactor
solamente; si además, se desea adaptar la frecuencia de operación del sistema, podría
colocarse un segundo varactor en la red y de esta manera adaptar ambos parámetros.
Para diseñar la red de acoplamiento tipo PI, se considera una impedancia parásita
de fuente típica de 50Ω, una impedancia de carga de 25 + j43,33Ω y una frecuencia
de operación a 2.4GHz, el valor de los elementos de la red de acoplamiento pueden
ser calculados usando teoría de circuitos básica: CS = 3,97pF , L = 2,43nH , CL =
4,05pF . Utilizando estos valores se raliza el layout mostrado en la figura 4.18.
Para caracterizar a la red PI se realizaron 2 experimentos. El primero consiste en
variar el valor del capacitor variable desde su valor mínimo hasta su valor máximo,
figura 4.19. De la figura puede observarse que para valores por debajo y por encima
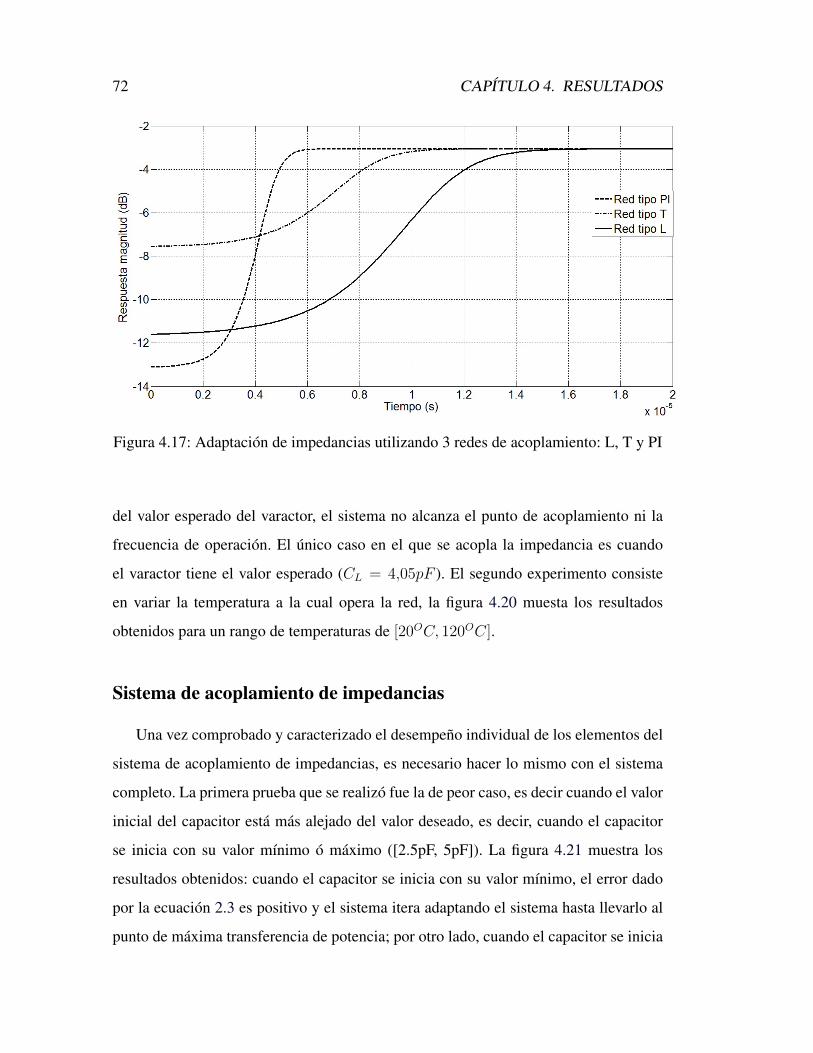
72 CAPÍTULO 4. RESULTADOS
Figura 4.17: Adaptación de impedancias utilizando 3 redes de acoplamiento: L, T y PI
del valor esperado del varactor, el sistema no alcanza el punto de acoplamiento ni la
frecuencia de operación. El único caso en el que se acopla la impedancia es cuando
el varactor tiene el valor esperado (CL = 4,05pF ). El segundo experimento consiste
en variar la temperatura a la cual opera la red, la figura 4.20 muesta los resultados
obtenidos para un rango de temperaturas de [20OC, 120OC].
Sistema de acoplamiento de impedancias
Una vez comprobado y caracterizado el desempeño individual de los elementos del
sistema de acoplamiento de impedancias, es necesario hacer lo mismo con el sistema
completo. La primera prueba que se realizó fue la de peor caso, es decir cuando el valor
inicial del capacitor está más alejado del valor deseado, es decir, cuando el capacitor
se inicia con su valor mínimo ó máximo ([2.5pF, 5pF]). La figura 4.21 muestra los
resultados obtenidos: cuando el capacitor se inicia con su valor mínimo, el error dado
por la ecuación 2.3 es positivo y el sistema itera adaptando el sistema hasta llevarlo al
punto de máxima transferencia de potencia; por otro lado, cuando el capacitor se inicia
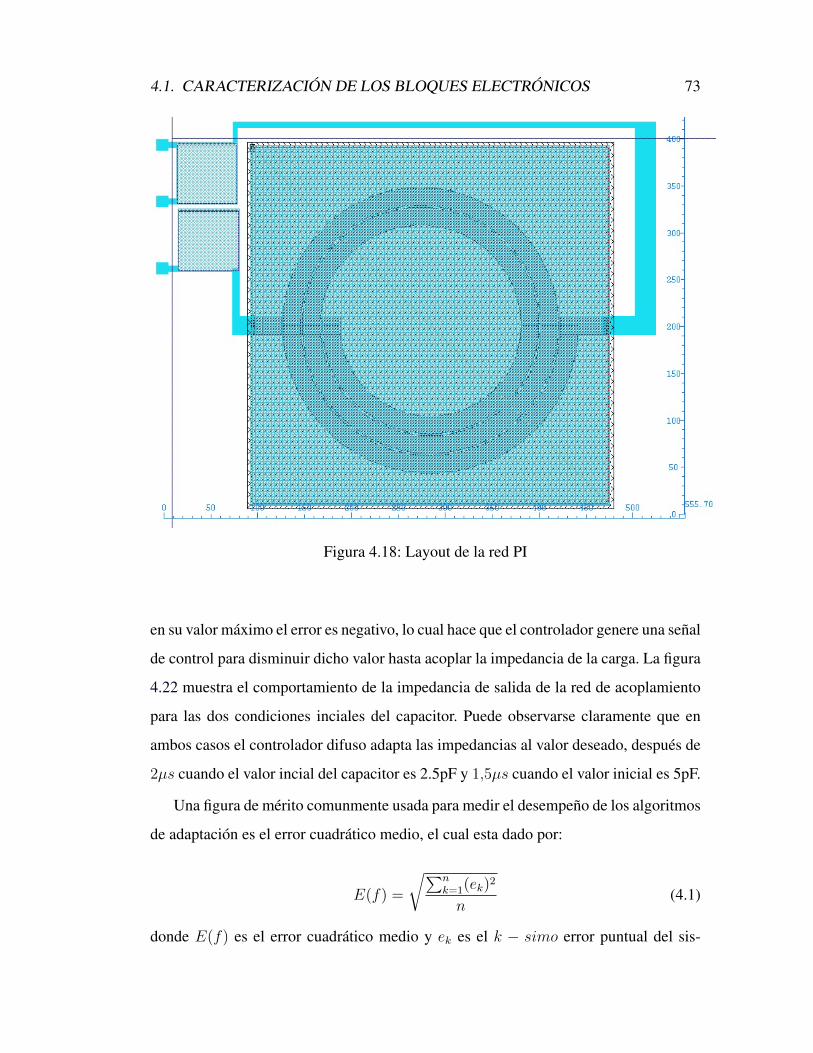
4.1. CARACTERIZACIÓN DE LOS BLOQUES ELECTRÓNICOS 73
Figura 4.18: Layout de la red PI
en su valor máximo el error es negativo, lo cual hace que el controlador genere una señal
de control para disminuir dicho valor hasta acoplar la impedancia de la carga. La figura
4.22 muestra el comportamiento de la impedancia de salida de la red de acoplamiento
para las dos condiciones inciales del capacitor. Puede observarse claramente que en
ambos casos el controlador difuso adapta las impedancias al valor deseado, después de
2µs cuando el valor incial del capacitor es 2.5pF y 1,5µs cuando el valor inicial es 5pF.
Una figura de mérito comunmente usada para medir el desempeño de los algoritmos
de adaptación es el error cuadrático medio, el cual esta dado por:
E(f) =
√∑nk=1(ek)
2
n(4.1)
donde E(f) es el error cuadrático medio y ek es el k − simo error puntual del sis-
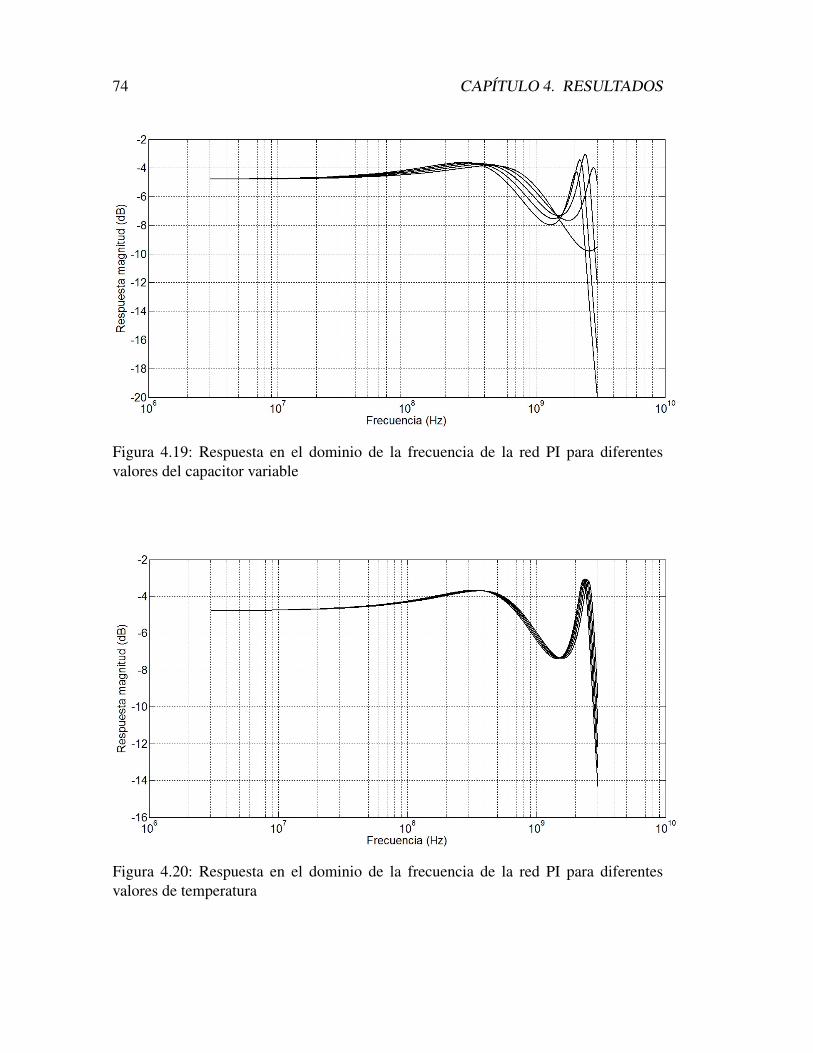
74 CAPÍTULO 4. RESULTADOS
Figura 4.19: Respuesta en el dominio de la frecuencia de la red PI para diferentesvalores del capacitor variable
Figura 4.20: Respuesta en el dominio de la frecuencia de la red PI para diferentesvalores de temperatura
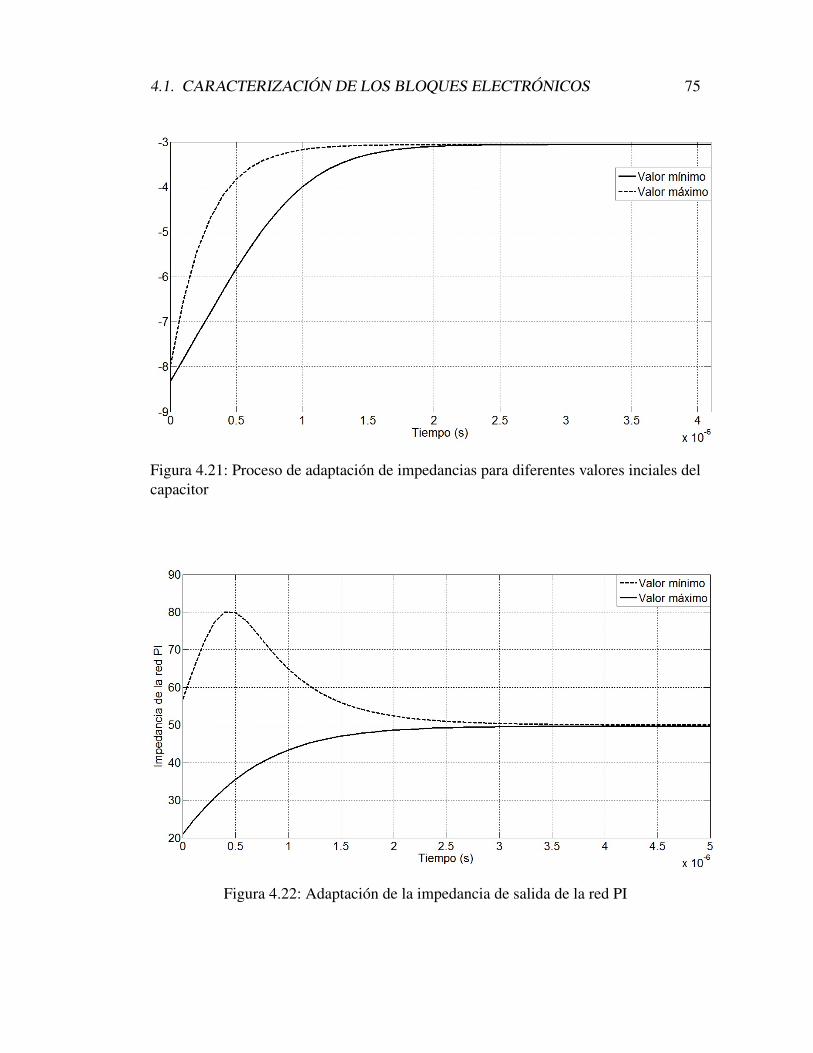
4.1. CARACTERIZACIÓN DE LOS BLOQUES ELECTRÓNICOS 75
Figura 4.21: Proceso de adaptación de impedancias para diferentes valores inciales delcapacitor
Figura 4.22: Adaptación de la impedancia de salida de la red PI
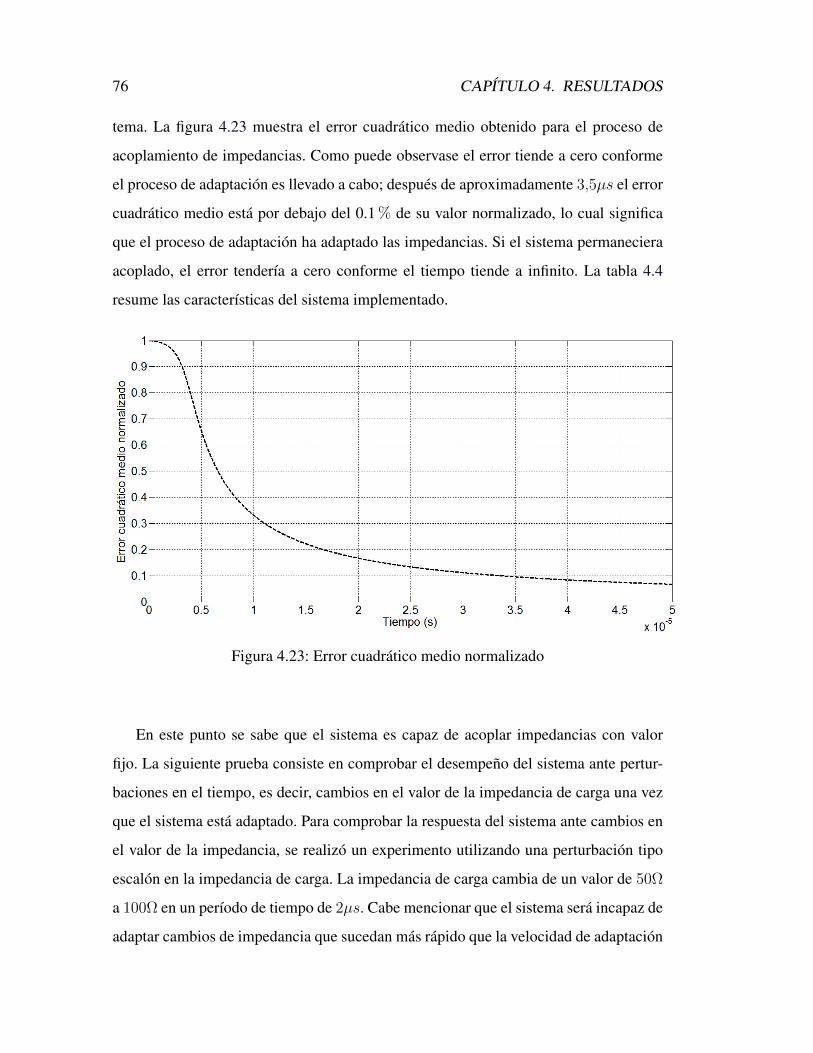
76 CAPÍTULO 4. RESULTADOS
tema. La figura 4.23 muestra el error cuadrático medio obtenido para el proceso de
acoplamiento de impedancias. Como puede observase el error tiende a cero conforme
el proceso de adaptación es llevado a cabo; después de aproximadamente 3,5µs el error
cuadrático medio está por debajo del 0.1 % de su valor normalizado, lo cual significa
que el proceso de adaptación ha adaptado las impedancias. Si el sistema permaneciera
acoplado, el error tendería a cero conforme el tiempo tiende a infinito. La tabla 4.4
resume las características del sistema implementado.
Figura 4.23: Error cuadrático medio normalizado
En este punto se sabe que el sistema es capaz de acoplar impedancias con valor
fijo. La siguiente prueba consiste en comprobar el desempeño del sistema ante pertur-
baciones en el tiempo, es decir, cambios en el valor de la impedancia de carga una vez
que el sistema está adaptado. Para comprobar la respuesta del sistema ante cambios en
el valor de la impedancia, se realizó un experimento utilizando una perturbación tipo
escalón en la impedancia de carga. La impedancia de carga cambia de un valor de 50Ω
a 100Ω en un período de tiempo de 2µs. Cabe mencionar que el sistema será incapaz de
adaptar cambios de impedancia que sucedan más rápido que la velocidad de adaptación
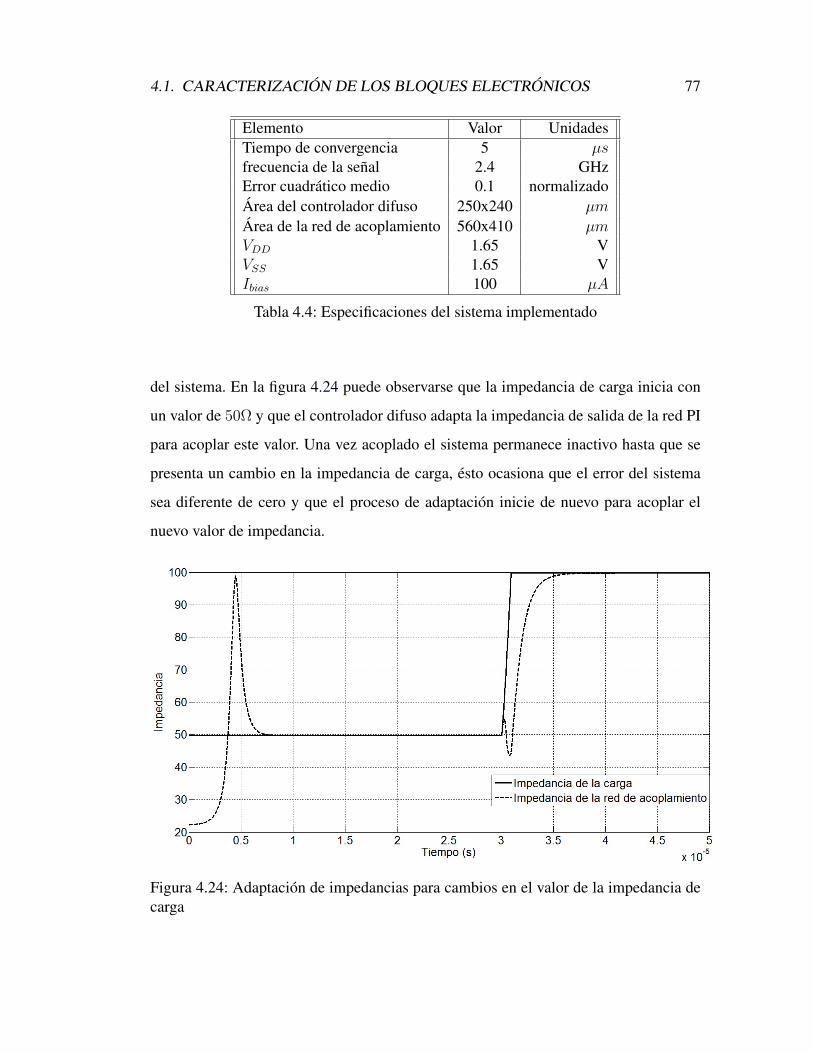
4.1. CARACTERIZACIÓN DE LOS BLOQUES ELECTRÓNICOS 77
Elemento Valor UnidadesTiempo de convergencia 5 µsfrecuencia de la señal 2.4 GHzError cuadrático medio 0.1 normalizadoÁrea del controlador difuso 250x240 µm
Área de la red de acoplamiento 560x410 µmVDD 1.65 VVSS 1.65 VIbias 100 µA
Tabla 4.4: Especificaciones del sistema implementado
del sistema. En la figura 4.24 puede observarse que la impedancia de carga inicia con
un valor de 50Ω y que el controlador difuso adapta la impedancia de salida de la red PI
para acoplar este valor. Una vez acoplado el sistema permanece inactivo hasta que se
presenta un cambio en la impedancia de carga, ésto ocasiona que el error del sistema
sea diferente de cero y que el proceso de adaptación inicie de nuevo para acoplar el
nuevo valor de impedancia.
Figura 4.24: Adaptación de impedancias para cambios en el valor de la impedancia decarga
78 CAPÍTULO 4. RESULTADOS
Por motivos de comparación, y ante la falta de esquemas similares con los cuales
se pueda comparar el desempeño del sistema propuesto, se implementó el algoritmo
LMS para medir su desempeño contra el del controlador difuso. Ésta comparación fué
hecha con los resultados obtenidos de la simulación post-layout del controlador difuso
y los datos obtenidos de la simulación a nivel comportamental del algoritmo LMS. En
el algoritmo LMS el criterio es optimizar estimaciones temporales del error 4.2. Este
error es usado para adaptar el sistema mediante un esquema adaptivo, de manera similar
al utilizado por el controlador difuso propuesto
ρ(t) = −2µ
∫ t
−∞e(u)∇ρe(u)du (4.2)
donde ρ es el coeficiente de acoplamiento de impedancias, µ es una constante la cual
establece la velocidad de adaptación y ∇ρe(u) representa el gradiente del error rela-
cionado al parámetro ρ.
La figura 4.25 muestra la comparación del desempeño del algoritmo LMS y del
controlador difuso para adaptar el mismo sistema de impedancias. Como puede ob-
servarse, ambos algoritmos alcanzan el punto de adaptación permitiendo al sistema
tener máxima transferencia de potencia; sin embargo, el controlador difuso propuesto
adapta al sistema en un tiempo de 5µs, mientras que al algoritmo LMS le toma aproxi-
madamente 30µs para llegar al punto de convergencia. Finalmente de la figura 4.26 se
observa que el controlador difuso no solo acopla las impedancias 6 veces más rápido,
sino que lo hace con menor error. Tomando como referencia el 10 % del valor normal-
izado del error cuadrático medio podemos observar que el controlador difuso llega a
éste punto en un tiempo 30µs mientras que el algoritmo lo hace en 45µs.
4.2. Discusión del capítulo
En éste capítulo se presentan los resultados de simulaciones post-layout del sistema.
Los experimentos para caracterizar al sistema incluyen variaciones de temperatura y de
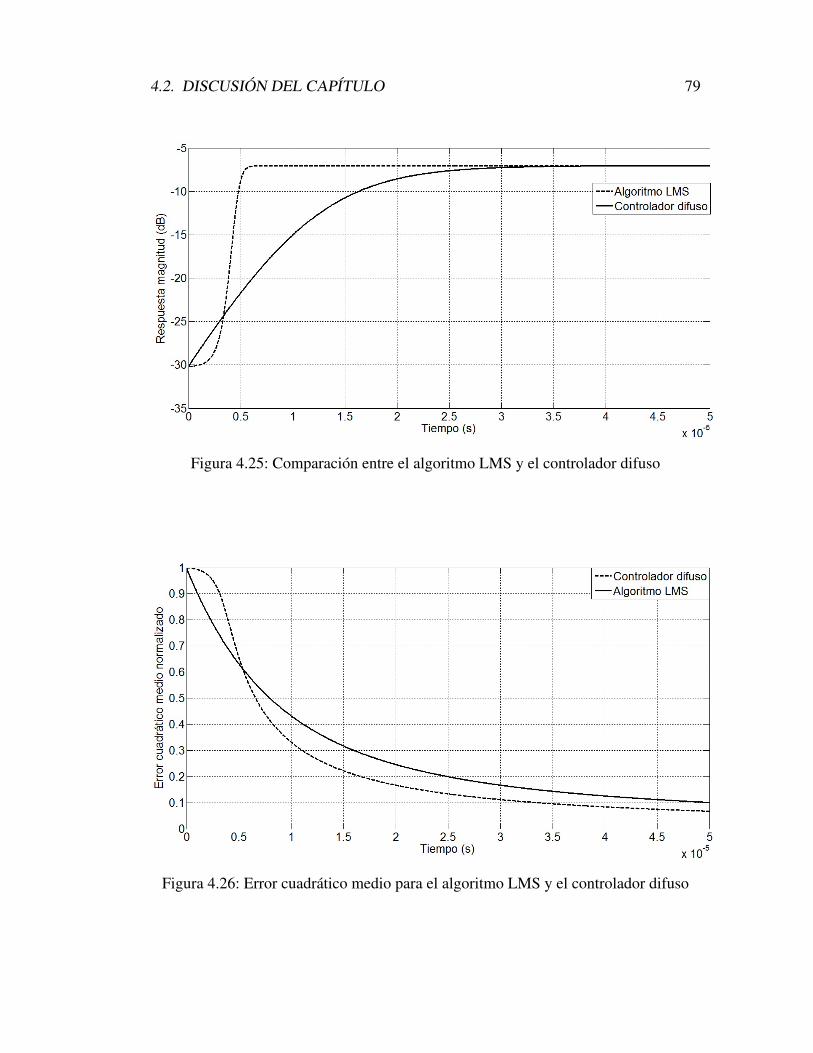
4.2. DISCUSIÓN DEL CAPÍTULO 79
Figura 4.25: Comparación entre el algoritmo LMS y el controlador difuso
Figura 4.26: Error cuadrático medio para el algoritmo LMS y el controlador difuso

80 CAPÍTULO 4. RESULTADOS
la fuente de alimentación, para probar su robustez ante estas perturbaciones.
Los resultados muestran que el sistema es capaz de adaptar impedancias tanto reales
como complejas, lo cual es una ventaja sobre otras propuestas que solo pueden adaptar
impedancias reales [ELD08] o imaginarias [ELD08], pero no ambas. Una característica
a tomar en cuenta es que el proceso de adaptación de la impedancia de la red cambia
la amplitud y fase de la señal radiada, por lo tanto los datos transmitidos se pueden
corromper si la adaptación se produce durante la transmisión. Por lo tanto, el proceso
de adaptación se debe llevar a cabo durante períodos cortos de tiempo para minimizar
el riesgo de pérdida de datos. Esto conlleva a la necesidad de contar con algoritmos
de adaptación rápidos y de baja complejidad para adaptar tanto la parte real como la
imaginaria de la impedancia de carga. El sistema propuesto presenta éstas característi-
cas: tiene una velocidad de adaptacion rapida, baja complejidad y es capaz de adaptar
impedancias reales o complejas.
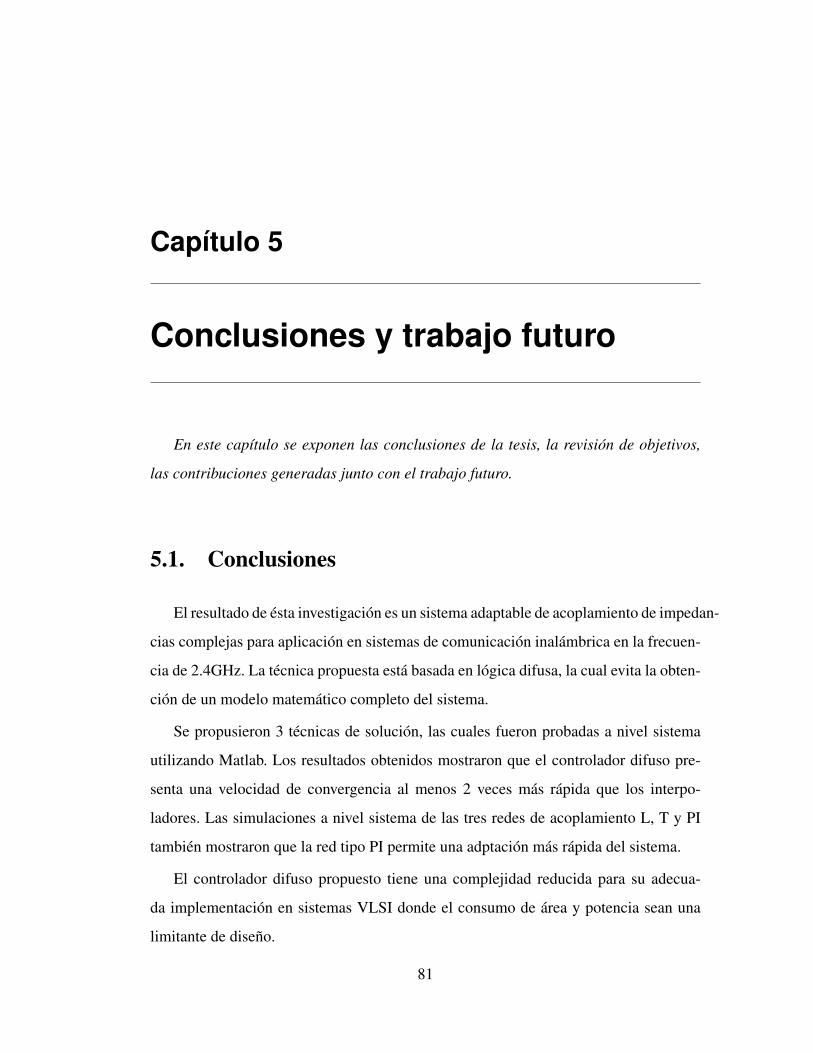
Capítulo 5
Conclusiones y trabajo futuro
En este capítulo se exponen las conclusiones de la tesis, la revisión de objetivos,
las contribuciones generadas junto con el trabajo futuro.
5.1. Conclusiones
El resultado de ésta investigación es un sistema adaptable de acoplamiento de impedan-
cias complejas para aplicación en sistemas de comunicación inalámbrica en la frecuen-
cia de 2.4GHz. La técnica propuesta está basada en lógica difusa, la cual evita la obten-
ción de un modelo matemático completo del sistema.
Se propusieron 3 técnicas de solución, las cuales fueron probadas a nivel sistema
utilizando Matlab. Los resultados obtenidos mostraron que el controlador difuso pre-
senta una velocidad de convergencia al menos 2 veces más rápida que los interpo-
ladores. Las simulaciones a nivel sistema de las tres redes de acoplamiento L, T y PI
también mostraron que la red tipo PI permite una adptación más rápida del sistema.
El controlador difuso propuesto tiene una complejidad reducida para su adecua-
da implementación en sistemas VLSI donde el consumo de área y potencia sean una
limitante de diseño.
81
82 CAPÍTULO 5. CONCLUSIONES Y TRABAJO FUTURO
El desempeño del sistema fué probado con simulaciones post-layout tomando en
cuenta la robustez ante variaciones de temperatura y voltaje de la fuente de alimentación.
5.2. Revisión de objetivos
La investigación de esta tesis está centrada en el problema de pérdidas de señal por
reflexión, para ello se diseñó un esquema adaptable de acoplamiento de impedancias
que reduce éstas pérdias en un sistema de comunicación.
Recordando que el objetivo general era:
diseñar un sistema de acoplamiento de impedancias con aplicación en sistemas
inalámbricos trabajando en la frecuencia de 2.4GHz..
Se concluye que éste fue alcanzado, ya que el esquema propuesto:
1. Utiliza una red de acoplamiento tipo PI con un varactor que permite la modifi-
cación de su impedancia de salida.
2. El controlador difuso propuesto realiza el proceso de adaptación de la impedancia
de salida de la red tipo PI.
3. La adaptación de la impedancia de salida de la red tipo PI permite el acoplamiento
de la impedancia de carga y la impedancia de fuente, permitiendo la máxima
transferencia de potencia.
Los objetivos específicos fueron los siguientes:
Comprobar el funcionamiento del sistema propuesto mediante simulaciones a
nivel comportamental.
Obtener un modelo matemático del sistema para comprobar su estabilidad.
Proponer un controlador difuso con complejidad reducida que permita el proceso
de adaptación del sistema de acoplamiento de impedancias.
5.3. CONTRIBUCIONES GENERADAS 83
Implementar a nivel transistor cada uno de los bloques que conforman el sistema.
Realizar pruebas a nivel post-layout para comprobar la funcionalidad de la pro-
puesta, considerando el impacto de parámetros tales como temperatura y varia-
ciones de proceso.
Se concluye que los objetivos específicos fueron alcanzados ya que el diseño del sis-
tema inició con la comprobación de su funcionaliad a nivel comprotamental, siguiendo
el proceso de diseño hasta lograr los resultados finales post-layout, considerando siem-
pre mantener la complejidad de los sitemas reducida al máximo. También se utilizó la
técnica de LMI y el criterio de Lyapunov para probar matemáticamente la estabilidad
del sistema propuesto.
5.3. Contribuciones generadas
Las principales contribuciones de la investigación son:
1. La propuesta de algoritmos basados en conocimiento para la solución de proble-
mas en los cuales no es viable la obtención de un modelo matemático completo.
2. El diseño de un controlador difuso con complejidad reducida para la optimización
del consumo de área y potencia.
5.4. Trabajo futuro
Como trabajo futuro se puede adaptar el valor del segundo capacitor de la red de
acoplamiento tipo PI para modificar algún otro parámetro del sistema como, por ejem-
plo, la frecuencia de operación. Ésto puede ser de gran utilidad en sistemas en los cuales
la frecuencia de la señal no es constante.
Aprovechar la modularidad del controlador difuso y agregarle más entradas y sali-
das para adaptar otros parámetros del sistema. En el caso del punto anterior, en el que
84 CAPÍTULO 5. CONCLUSIONES Y TRABAJO FUTURO
se pueda modificar el valor del segundo capacitor, se puede agregar una entrada que de-
tecte cambios en la frecuencia de la señal y una salida que adapte el valor del capacitor
para que la red trabaje a la misma frecuencia de la señal.
La fabricación y mediciones experimentales del sistema propuesto, así como la
creación del vehículo de pruebas para lograr este objetivo.
5.5. Publicaciones derivadas
Las publicaciones derivadas de este trabajo de tesis, al momento de presentar el
examen de grado, son [EAH09], [AHMn11] y [Día]
En [EAH09], se publica la propuesta del sistema de acoplamiento de impedancias
a nivel algoritmo. El nombre de esta publicación es An adaptive impedance matching
approach based on fuzzy control.
En [AHMn11], se comprueba la estabilidad del sistema y los resultados del desem-
peño del sistema a nivel comportamental. El nombre de esta publicación es fuzzy logic
control for automatic impedance matching.
En [Día], El capítulo de este libro se enfocó a las propuestas de solucion para el
acoplamiento adaptable de impedancias en sistemas VLSI. El nombre de el capítulo
del libro es Impedance matching in VLSI systems.
Índice de figuras
1.1. Acoplamiento capacitivo entre dos líneas de señal . . . . . . . . . . . . . . 41.2. Efecto de crosstalk . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.3. Adecuado espaciamiento entre líneas de interconexión para evitar el efecc-
to de crosstalk . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.4. Unión dado-empaquetado: Flip-chip . . . . . . . . . . . . . . . . . . . . . 71.5. Unión dado-empaquetado: Wire-bonding . . . . . . . . . . . . . . . . . . . 71.6. Estructura básica de una red neuronal . . . . . . . . . . . . . . . . . . . . 111.7. Estructura básica de un controlador difuso . . . . . . . . . . . . . . . . . . 13
2.1. Estructura general del sistema de acoplamiento de impedancias . . . . . . . 232.2. Red de acoplamiento tipo L . . . . . . . . . . . . . . . . . . . . . . . . . . 232.3. Red de acoplamiento tipo T . . . . . . . . . . . . . . . . . . . . . . . . . . 232.4. Red de acoplamiento tipo PI . . . . . . . . . . . . . . . . . . . . . . . . . 242.5. Respuesta en magnitud para la adaptación de las tres redes de acoplamiento
utilizando el controlador difuso . . . . . . . . . . . . . . . . . . . . . . . . 262.6. Impedancia de salida de las redes de acoplamiento usando el controlador
difuso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.7. Interpolador Signo-Signo propuesto para el acoplamiento de impedancias . 272.8. Impedancia de salida de las redes de acoplamiento usando el interpolador
signo-signo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.9. Impedancia de salida de las redes de acoplamiento usando el interpolador
signo-signo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.10. Variación de la pendiente de las funciones de membresía del interpolador
signo-signo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.11. Repuesta en magnitud del sistema de acoplamiento de impedancias para
diferentes pendientes de las funciones de membresía del interpolador signo-signo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.12. Interpolador Sigmoidal propuesto para el acoplamiento de impedancias . . 312.13. Respuesta en magnitud del sistema de acoplamiento de impedancias usan-
do el interpolador sigmoidal . . . . . . . . . . . . . . . . . . . . . . . . . 312.14. Respuesta en magnitud del sistema de acoplamiento de impedancias usan-
do el interpolador sigmoidal . . . . . . . . . . . . . . . . . . . . . . . . . 322.15. Estructura general del sistema de acoplamiento de impedancias implementado 33
85
86 ÍNDICE DE FIGURAS
2.16. Estructura general del controlador difuso propuesto . . . . . . . . . . . . . 352.17. Forma y distribución de las funciones de membresia . . . . . . . . . . . . . 362.18. Circuito para generar las funciones de membresia tipo S y Z . . . . . . . . 382.19. Circuito para generar la función de membresia triangular . . . . . . . . . . 392.20. Circuito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402.21. Estructura general del controlador difuso usando un circuito normalizador . 412.22. Circuito normalizador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.23. Circuito del amplificador de transconductancia . . . . . . . . . . . . . . . . 442.24. Impedancias equivalentes . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.1. Circuito de acoplamiento de impedancias . . . . . . . . . . . . . . . . . . 533.2. Circuito de acoplamiento de impedancias con la impedancia de carga equi-
valente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.1. Programación de la función de membresía tipo S . . . . . . . . . . . . . . 584.2. Layout del circuito para generar las funciones de membresia tipo S y tipo Z 604.3. Resultado de simulación del layout de la función de membresia tipo S . . . 614.4. Comportamiento de la función de membresía tipo S para variaciones de
tempesratura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 614.5. Comportamiento de la función de membresía tipo S para variaciones en la
fuente de alimentación . . . . . . . . . . . . . . . . . . . . . . . . . . . . 624.6. Layout del circuito para generar la función de membresía tipo triangular . . 634.7. Resultado de simulación del layout de la función de membresía tipo T . . . 644.8. Comportamiento de la función de membresía triangular para variaciones de
temperatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 644.9. Comportamiento de la función de membresía triangular para variaciones en
la fuente de alimentación . . . . . . . . . . . . . . . . . . . . . . . . . . . 654.10. Layout del circuito normalizador . . . . . . . . . . . . . . . . . . . . . . . 664.11. Simulación post-layout del circuito normalizador . . . . . . . . . . . . . . 674.12. Comportamiento de la función de membresía triangular para variaciones de
temperatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 674.13. Comportamiento de la función de membresía triangular para variaciones en
la fuente de alimentación . . . . . . . . . . . . . . . . . . . . . . . . . . . 684.14. Layout del circuito multiplicador . . . . . . . . . . . . . . . . . . . . . . . 694.15. Simulación post-layout del circuito multiplicador . . . . . . . . . . . . . . 704.16. Simulación post-layout del circuito multiplicador . . . . . . . . . . . . . . 704.17. Adaptación de impedancias utilizando 3 redes de acoplamiento: L, T y PI . 724.18. Layout de la red PI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 734.19. Respuesta en el dominio de la frecuencia de la red PI para diferentes valores
del capacitor variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 744.20. Respuesta en el dominio de la frecuencia de la red PI para diferentes valores
de temperatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
ÍNDICE DE FIGURAS 87
4.21. Proceso de adaptación de impedancias para diferentes valores inciales delcapacitor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.22. Adaptación de la impedancia de salida de la red PI . . . . . . . . . . . . . . 754.23. Error cuadrático medio normalizado . . . . . . . . . . . . . . . . . . . . . 764.24. Adaptación de impedancias para cambios en el valor de la impedancia de
carga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 774.25. Comparación entre el algoritmo LMS y el controlador difuso . . . . . . . . 794.26. Error cuadrático medio para el algoritmo LMS y el controlador difuso . . . 79
Índice de tablas
2.1. Parámetros para la simulación en Matlab . . . . . . . . . . . . . . . . . . . 25
4.1. Especifaciaciones de los circuitos de las funciones de membresía . . . . . . 624.2. Especifaciaciones del circuito normalizador . . . . . . . . . . . . . . . . . 684.3. Especifaciaciones del multiplicador . . . . . . . . . . . . . . . . . . . . . 714.4. Especificaciones del sistema implementado . . . . . . . . . . . . . . . . . 77
88
Referencias
[AHMn11] Díaz Méndez Alejandro Ramírez Cortés J. Manuel Arroyo Huerta, José E.y Mario Edgardo Magaña, “Fuzzy Logic Control for Automatic ImpedanceMatching,” IEEE International Conference on Microelectronics, 2011.[Citada en p. 84]
[Ayd11] K. ; Ilarslan M. ; Duymaz E. Aydemir, M.E. ; Buyukatak, “Swarm intel-ligence in solution of impedance matching problem in Satellite Transmit-ters,” IEEE 5th International Conference on Recent Advances in SpaceTechnologies (RAST), páginas 436–440, 2011. [Citada en p. 16]
[B.90] Gilbert B., “Current-mode circuits from a translinear view point: A tutori-al,” Analog IC Design: in the Current-Mode Approach, 1990. [Citada en p. 40]
[Bak12] M.Y. ; Sharun S.M. ; Norhayati M.N. ; Supardi N.Z. ; Saad Z. Bakri,F.A. ; Mashor, “A simple Adaptive Fuzzy Logic Controller base on shift-ing of the membership function,” IEEE 8th International Colloquium onSignal Processing and its Applications (CSPA), páginas 456–460, 2012.[Citada en p. 58]
[Día] ISBN =978-953-307-884-7 editor =InTech year = 2011 Díaz Méndez J.Alejandro, López Delgadillo Edgar and Arroyo Huerta J. Erasmo, title= Impedance Matching in VLSI Systems. [Citada en p. 84]
[Deb11] B. ; Roy J.S. Deb, A. ; Gupta, “Performance comparison of Differ-ential Evolution, Genetic Algorithm and Particle Swarm Optimizationin impedance matching of aperture coupled microstrip antennas,” 201111th Mediterranean Microwave Symposium (MMS), páginas 17–20, 2011.[Citada en p. 16]
[EAH09] J.M. Ramírez-Cortés J.C. Sánchez García E. Arroyo-Huerta, A. Díaz-Méndez, “An adaptive impedance matching approach based on fuzzy con-trol,” IEEE International Midwest Symposium on Circuits and Systems,páginas 1–4, 2009. [Citada en p. 84]
89
90 REFERENCIAS
[ELD08] J.A. Diaz-Mendez F. Maloberti E. Lopez-Delgadillo, M.A. Garcia-Andrade, “Automatic Impedance Control for Chip-to-Chip Interconnec-tions,” 15th IEEE Int. Conf. on Electronics, Circuits and Systems, páginas332–335, 2008. [Citada en p. 17, 80]
[fit99a] IEEE Standard for information technology, “IEEE Standard for informa-tion technology - Telecommunications and information exchange betweensystems - Local and metropolitan area networks - Specific requirements.Part 11: Wireless LAN Medium Access Control (MAC) and Physical Lay-er (PHY) Specifications,” 1999. [Citada en p. 2]
[fit99b] IEEE Standard for information technology, “IEEE Standard for informa-tion technology - Telecommunications and information exchange betweensystems - Local and metropolitan area networks - Specific requirements.Part 15.1: Wireless Medium Access Control (MAC) and Physical Lay-er (PHY) Specifications for Wireless Personal Area Networks (WPANs),”1999. [Citada en p. 2]
[Hem05] Thomas Hemminger, “Antenna Impedance Matching With Neural Net-works,” International Journal of Neural Systems, tomo 15:páginas 357–361, 2005. [Citada en p. 17]
[II04] Toda Takeshi Oishi Yasuyuki Ida Ichirou, Takada Jun-ichi, “An AdaptiveImpedance Matching System and Application to Mobile Antennas,” IEEETENCON, tomo 3:páginas 543–546, 2004. [Citada en p. 8]
[II05] Toda Takeshi Oishi Yasuyuki Ida Ichirou, Takada Jun-ichi, “An Adap-tive Impedance Matching System and Considerations for a Better Perfor-mance,” 10th Asia-Pacific Conference on Communications and 5th Inter-national Symposium on Multi-Dimensional Mobile communications, 2005.[Citada en p. 8]
[Kaz06] Li Meng Kazemian, Hassan B., “An adaptive Control for Video Transmis-sion over Bluetooth,” IEEE transactions on Fuzzy Systems, tomo 14, 2006.[Citada en p. 9]
[Kaz07] Chantaraskul S. Kazemian, H.B., “An integrated Neuro-Fuzzy approach toMPEG Video Transmission in Bluetooth,” Proceedings of the 2007 IEEESymposium on computational Intelligence in Image and Signal Processing(CIISP 2007), 2007. [Citada en p. 9]
[Kaz11] C. ; Maloberti F. Kazanc, O. ; Dehollain, “Impedance-matched sensor-tagantenna design using genetic algorithm optimization,” 5th InternationalSymposium on Medical Information and Communication Technology (IS-MICT), páginas 61–64, 2011. [Citada en p. 8, 16]
REFERENCIAS 91
[L.65] Zadeh L., “Fuzzy sets,” Information and Control, páginas 338–353, 1965.[Citada en p. 12]
[Lac10] Etienne ; Fontgalland Glauco ; Tedjini Smail ; D’Assuncao Adaildo G.Lacouth, Patric ; Perret, “New RFID’s chip matching technique usingArtificial Neural Networks,” 2010 IEEE International Conference onRFID-Technology and Applications (RFID-TA), páginas 189–193, 2010.[Citada en p. 17]
[Lam11] H.K. Lam, “LMI-Based Stability Analysis for Fuzzy-Model-Based Con-trol Systems Using Artificial T-S Fuzzy Model,” IEEE Transactions onFuzzy Systems, 2011. [Citada en p. 49]
[LB05] Khatri Sunil LaMeres Brock, “Broadband Impedance Matching for Induc-tive Interconnect in VLSI Packages,” IEEE International Conference onComputer Design: VLSI in Computers and Processors, 2005. [Citada en p. 6]
[MAJD94] Sedra Adel Munshi Anees Johns David, “Adaptive Impedance Matching,”IEEE International Symposium on Circuits and Systems, tomo 2:páginas69–72, 1994. [Citada en p. 17]
[Mic02] Grant Mick, “Signal Integrity Considerations for High Speed Digital Hard-ware Design,” White Paper, Calyptech, 2002. [Citada en p. 2]
[Ott98] H. W. Ott, “Noise Reduction Techniques in Electronic Systems, secondedition,” 1998. [Citada en p. 3]
[Pau92] C. R. Paul, “Derivation of common impedance coupling from thetransmission-line equations,” IEEE Transactions on Electromagnetic Com-patibility, tomo 34:páginas 315–319, 1992. [Citada en p. 3]
[Pfe05] U.R. Pfeiffer, “Low-loss contact pad with tuned impedance for operation atmillimeter wave frequencies,” 9th IEEE Workshop on Signal Propagationon Interconnects, tomo 9, 2005. [Citada en p. 7]
[Pha11] Quan Minh Dao Tran ; Phuong Hong Phan, “Optimal design forRFID antennas at frequency 2.45GHz,” International Conference on Ad-vanced Technologies for Communications (ATC), páginas 276–278, 2011.[Citada en p. 16]
[PS05] Henrik Sjoland Peter Sjoblom, “An adaptive impedance tuning CMOS cir-cuit for ISM 2.4-GHz band,” IEEE Transactions on Circuits and Systems-I,tomo 52:páginas 1115–1124, 2005. [Citada en p. 17]
[R.98] Wiegerink R., “Analysis and Synthesis of MOS Translinear Circuits,” pági-nas 110–123, 1998. [Citada en p. 37]
92 REFERENCIAS
[Rah10] Y.M. ; Kordalivand A.M. Rahnama, M. ; Gilmalek, “Ultra wide-bandLNA using RFCMOS technology and tunability band with neural net-work,” IEEE Control and System Graduate Research Colloquium (ICS-GRC), páginas 75–79, 2010. [Citada en p. 17]
[SP11] J. ; Garcia-Ducar P. ; Carro P.L. ; Valdovinos A. Sanchez-Perez, C. ;de Mingo, “Design of a Varactor-Based Matching Network Using AntennaInput Impedance Variation Knowledge,” IEEE Vehicular Technology Con-ference (VTC Fall), páginas 1–5, 2011. [Citada en p. 43]
[Tah00] M.M. ; Badawi A.S. Taha, A.K. ; El-Khatib, “Design of a fuzzy logicprogrammable membership function circuit,” IEEE Radio Science Con-ference, páginas C20/1–C20/6, 2000. [Citada en p. 58]
[TS92a] K. Tanaka y M. Sugeno, “Stability analysis and design of fuzzy con-trol systems,” Fuzzy Sets and Systems, tomo 45:páginas 135–156, 1992.[Citada en p. 49]
[TS92b] K. Tanaka y M. Sugeno, “Stability analysis and design of fuzzy controlsystems,” Fuzzy Sets Syst, tomo 45:páginas 135–156, 21992. [Citada en p. 52]
[UAP11] D. Ulbrich A. ; Pamp, J. ; Heberling, “Adaptive matching networks forMIMO RF-frontends,” IEEE Microwave Conference (GeMIC), páginas 1–4, 2011. [Citada en p. 43]
[Vil12] Niksa Vilovic, Ivan ; Burum, “Design and feed position estimation for cir-cular microstrip antenna based on neural network model,” IEEE 6th Euro-pean Conference on Antennas and Propagation (EUCAP), páginas 3614–3617, 2012. [Citada en p. 17]
[VM93] Prasad Sheila Vai Mankuan, “Automatic Impedance Matching with a Neu-ral Network,” IEEE Microwave and Guided Wave Letters, tomo 3:páginas353–354, 1993. [Citada en p. 17]
[wes91] D. weston, “Electromagnetic Compatibilities, Principles and Applications,second edition,” 1991. [Citada en p. 3]
[You00] Brian Young, “Digital signal integrity: modeling and simulation with in-terconnects and package,” Prentice-Hall PTR, 2000. [Citada en p. 3]
[YS98] Wai Kit Lau Yichuang Sun, “Evolutionary Tunning Method for Automat-ic Impedance Matching in Communication Systems,” IEEE InternationalConference on Electronics, Circuits and Systems, tomo 3:páginas 73–77,1998. [Citada en p. 16]
REFERENCIAS 93
[Zha11] Huaguang Zhang, “Relaxed Stability Conditions for Continuous-TimeT-S Fuzzy-Control Systems Via Augmented Multi-Indexed Matrix Ap-proach,” IEEE Transactions on Fuzzy Systems, páginas 478–492, 2011.[Citada en p. 49]