Embed Size (px)
Citation preview

Accessing from the Sky: UAV Communications for 5G and Beyond
Rui Zhang National University of Singapore
(e-mail: [email protected])
Yong ZengThe University of Sydney, Australia
(e-mail: [email protected])
IEEE ICC20 May 2019, Shanghai, China
ICC, 2019 1

Outline
Introduction (Rui Zhang)
UAV Communication Fundamentals (Rui Zhang)
UAV-Assisted Wireless Communications (Yong Zeng)
Cellular-Connected UAV (Yong Zeng)
Extensions and Future Work (Yong Zeng)
ICC, 2019 2

Outline Introduction
UAV communication requirement Wireless technologies for UAV The new paradigm: integrating UAVs into cellular
• Cellular-connected UAV• UAV-assisted wireless communications
What’s New?
UAV Communication Fundamentals
UAV-Assisted Wireless Communications
Cellular-Connected UAV
Extensions and Future Work ICC, 2019 3

Rui Zhang, National University of SingaporeIntroduction
UAV: Whose Time is Coming
Create more than 100,000 new jobs in US over the next 10 years Numerous applications: military, traffic control, cargo delivery, precision
agriculture, video streaming, aerial inspection, rescue and search, ……
Source: SDI analysis. https://www.marketresearch.com/product/sample-8691316.pdf
4ICC, 2019

Rui Zhang, National University of Singapore
Aerial photography
5
Drone Delivery
Aerial Inspection Precision Agriculture
ICC, 2019
Introduction

Rui Zhang, National University of Singapore
Traffic Monitoring
6ICC, 2019
Introduction
H. Menouar, et. al, “UAV-Enabled Intelligent Transportation Systems for the Smart City: Applications and Challenges”, IEEE Commun. Mag., Mar. 2017.

Rui Zhang, National University of Singapore
Airborne Communication Platform
Y. Zeng, R. Zhang, and T. J. Lim, “Wireless communications with unmanned aerial vehicles: opportunities and challenges,” IEEE Commun. Mag., May 2016.
7ICC, 2019
Introduction

Rui Zhang, National University of Singapore
FAA Rules for Small UAS June 2016: US Federal Aviation Administration (FAA) released new
rules for commercial use of small unmanned aircraft systems (UAS) (Part 107) Small UAS: 55 pounds (25 kg) Visual line-of-sight (VLoS) only Daylight-only operation Maximum ground speed: 100mph (161km/h) Maximum altitude: 400 feet (122 m) Operations are allowed in uncontrolled airspace (Class G) without air
traffic control (ATC) permission The road ahead:
Beyond VLoS operation? Completely autonomous flying?
8
Source: FAA, “Operation and Certification of Small Unmanned Aircraft Systems”, https://www.faa.gov/uas/media/RIN_2120-AJ60_Clean_Signed.pdf
ICC, 2019
Introduction

Rui Zhang, National University of Singapore
Wireless Communications for UAVs: Basic Requirement Control and Non-Payload
Communications (CNPC) Ensure safe, reliable, and effective
flight operation Low data rate, high reliability, high
security, low latency Telemetry (UAV status reporting) Command and control Navigation aids Sense and avoid (S&A) Air traffic control (ATC) relay,……
Payload Communications Application specific information Typically higher rate than CNPC CNPC information flows [ITUReportM.2171]
Control Station UAV
9ICC, 2019
Introduction
ITU, “Characteristics of unmanned aircraft systems and spectrum requirements to support their safe operation in non-segregated airspace,” Tech. Rep. M.2171, Dec. 2009.

Rui Zhang, National University of Singapore
3GPP UAV Communication Requirement
10ICC, 2019
Introduction
Data Type Data Rate Reliability Latency
DL (BS to UAV)
Command and control
60-100 Kbps
10−3 packet error rate
50 ms
UL (UAV toBS)
Command and control
60-100 Kbps
10−3 packet error rate
--
Application data
Up to 50 Mbps
-- Similar toterrestrial user
3GPP TR 36.777: “Technical specification group radio access network: study on enhanced LTE support for aerial vehicles”, Dec. 2017.

Rui Zhang, National University of Singapore
China Mobile Requirement for Typical Payload
11ICC, 2019
Introduction
UAV Application Height coverage Payload traffic latency
Payload data rate (DL/UL)
Drone delivery 100 m 500 ms 300 Kbps/200 Kbps
Drone filming 100 m 500 ms 300 Kbps/30 Mbps
Access point 500 m 500 ms 50 Mbps/50 Mbps
Infrastructureinspection 100 m 3000 ms 300 Kbps/10 Mbps
Drone fleet show 200 m 100 ms 200 Kbps/200 Kbps
Precisionagriculture 300 m 500 ms 300 Kbps/200 Kbps
“China mobile technical report: Internet of drones (in Chinese),”http://www.jintiankansha.me/t/AE9FsWW9tc

Rui Zhang, National University of Singapore
Wireless Technologies for UAV Communications (1/4) Direct ground-to-UAV communications
Simple, low cost Unlicensed spectrum (e.g., 2.4 GHz)
Main limitations: Unreliable, insecure Vulnerable to interference Limited data rate Visual line of sight (LoS) operation Difficult to legitimately monitor and manage
12ICC, 2019
Introduction

Rui Zhang, National University of Singapore
Wireless Technologies for UAV Communications (2/4) Satellite-UAV communications
Communication and Internet access via satellites Global coverage
Main limitations: Costly Heavy/bulky/energy-consuming communication equipment High latency Large signal attenuation
13ICC, 2019
Introduction

Rui Zhang, National University of Singapore
Wireless Technologies for UAV Communications (3/4) Flying ad-hoc network
Dynamically self-organizing and infrastructure-free Robust and adaptable Support for high mobility
Main limitations: Low spectrum efficiency Intermittent connectivity Complex routing protocol
14ICC, 2019
Introduction

Rui Zhang, National University of Singapore
Wireless Technologies for UAV Communications (4/4) Cellular network for UAV
UAV communications enabled by cellular infrastructure and technologies Almost ubiquitous accessibility worldwide Cost-effective, superior performance and scalability
Main limitations: Unavailable in remote areas Potential interference with terrestrial communications
15ICC, 2019
Introduction

Rui Zhang, National University of Singapore
Integrated Network for UAV Communications
16ICC, 2019
Introduction
Y. Zeng, Q. Wu, and R. Zhang, “Accessing from the Sky: a tutorial on UAV communications for 5G and beyond,’’ submitted to Proceedings of the IEEE, Invited Paper, available on arXiv

Rui Zhang, National University of Singapore
Integrating UAVs into Cellular: A Win-Win Technology Integrating UAVs into cellular networks (LTE, 5G, B5G…) For UAV industry:
More reliable and secure CNPC Unlimited operation range without relying on satellite High capacity enabled by advanced cellular techniques Cost effective: avoid building new infrastructure for UAV
communication Enhanced air traffic management: legitimate control takeover when
needed For cellular industry:
New business opportunities by incorporating aerial users More robust and cost-effective cellular network with aerial
communication platforms
17ICC, 2019
Integrating UAVs into 5G and Beyond
Y. Zeng, J. Lyu, and R. Zhang, “Cellular-connected UAV: potentials, challenges and promising technologies, IEEE Wireless Commun., Feb. 2019.

Rui Zhang, National University of Singapore
Integrating UAVs into Cellular: Two Frameworks Cellular-Connected UAV: UAVs as aerial users with their own missions
UAV-Assisted Wireless Communication: UAVs as aerial communication platforms (e.g. BS, relay, access point)
Cellular-Connected UAV UAV-Assisted Wireless Communication
18ICC, 2019
Integrating UAVs into 5G and Beyond
Y. Zeng, Q. Wu, and R. Zhang, “Accessing from the Sky: a tutorial on UAV communications for 5G and beyond,’’ submitted to Proceedings of the IEEE, Invited Paper, available on arXiv

Rui Zhang, National University of Singapore
UAV Communications: What’s New?
19
High altitude Up to 300 meters (as user in 3GPP) or even higher (as BS/relay)
High 3D mobility Partially or fully controllable placement/trajectory
New air-to-ground channel characteristic High probability of radio line-of-sight (LoS)
Size, weight and power constraint (SWAP) Limited UAV on-board energy/endurance
New opportunities and challenges for both cellular-connected UAVs and UAV-assisted wireless communications
ICC, 2019
Integrating UAVs into 5G and Beyond

Rui Zhang, National University of SingaporeCellular-Connected UAV
Cellular-Connected UAVs High altitude
3D coverage is challenging: existing BS antenna tilted downwards High 3D mobility
Partially controllable trajectory due to mission requirement (e.g., cargo delivery) Asymmetric downlink/uplink: ultra-reliable CNPC versus high-rate payload data Strong air-to-ground LoS channel
Pro: High degrees of macro-diversity (beneficial for BS association, CoMP) Con: Severe aerial-ground interference (in both uplink and downlink)
Mainly served by antenna side-lobe with current LTE BS
20ICC, 2019

Rui Zhang, National University of SingaporeCellular-Connected UAV
Severe Aerial-Ground Interference
Strong LoS Interference between UAV and terrestrial users Uplink: more interference imposed to neighbouring BSs Downlink: more interference received from neighbouring BSs
21ICC, 2019

Rui Zhang, National University of SingaporeCellular-Connected UAV
Reshaping Cellular Networks to Cover the Sky New techniques needed to enable highly heterogonous network with both
terrestrial and aerial users (more details given later) Possible spectrum allocation:
Protected aviation spectrum licensed to cellular operators for UAV CNPC Cellular spectrum shared by aerial and terrestrial users for payload data
Interference management techniques: Sub-sector in elevation domain 3D beamforming Coordinated resource allocation/CoMP Terrestrial-aerial NOMA Joint trajectory design and communication resource allocation
22ICC, 2019
Y. Zeng, Q. Wu, and R. Zhang, “Accessing from the Sky: a tutorial on UAV communications for 5G and beyond,’’ submitted to Proceedings of the IEEE, Invited Paper, available on arXiv

Rui Zhang, National University of SingaporeCellular-Connected UAV
Cellular-Connected UAVs: Industry Efforts
February 2016 Intel and AT&T Demonstrated the world’s first LTE-connected drone at the 2016 Mobile World Congress
August 2016 Ericsson and China Mobile
Claimed the world’s first 5G-enabled drone prototype field trial in WuXi of China
September 2016 Qualcomm Feasibility proof of drone operation over commercial LTE networks up to 400 feet
March 2017 3GPP Study item on “study on enhanced support for aerial vehicles using LTE”
May 2017 Qualcomm Trial report “LTE Unmanned Aircraft Systems”
November 2017 Huawei Wireless X Labs
Announced the "Digital Sky Initiative“ to “spur development of drone applications and enable the low airspace digitized economy via enhanced low airspace network coverage”
December 2017 3GPP 3GPP TR 36.777, Technical Report (Release 15)
23ICC, 2019

Advantages of UAV-assisted communication On demand deployment, fast response Cost effective Fully controllable mobility: dynamic 3D placement and
movement Short-distance LoS link
Three typical use cases UAV-aided ubiquitous coverage UAV-aided mobile relaying UAV-aided information dissemination/data collection
Rui Zhang, National University of Singapore
UAV-Assisted Wireless CommunicationsUAV-Assisted Wireless Communication
24ICC, 2019

UAV-Aided Ubiquitous Coverage Provide seamless coverage within the serving area Application scenarios: fast service recovery after natural disaster BS offloading at hotspot
Rui Zhang, National University of SingaporeUAV-Assisted Wireless Communication
Y. Zeng, R. Zhang, and T. J. Lim, "Wireless communications with unmanned aerial vehicles: opportunities and challenges," IEEE Commun. Mag., May 2016
25ICC, 2019

UAV-Aided Mobile Relaying Connecting two or more distant users or user groups Application scenarios: Emergency response, e.g., between frontline and headquarter Military network
Rui Zhang, National University of SingaporeUAV-Assisted Wireless Communication
Y. Zeng, R. Zhang, and T. J. Lim, "Wireless communications with unmanned aerial vehicles: opportunities and challenges," IEEE Commun. Mag., May 2016
26ICC, 2019

UAV-Aided Information Dissemination/Data Collection Application scenarios:
Periodic sensing IoT communications Multicasting
Rui Zhang, National University of SingaporeUAV-Assisted Wireless Communication
Y. Zeng, R. Zhang, and T. J. Lim, "Wireless communications with unmanned aerial vehicles: opportunities and challenges," IEEE Commun. Mag., May 2016
27ICC, 2019

UAV-Enabled Radio Access Network (RAN): A General Model
Rui Zhang, National University of SingaporeUAV-Assisted Wireless Communication
J. Zhang, Y. Zeng, and R. Zhang, “UAV-enabled radio access network: multi-mode communication and trajectory design,” IEEE Trans. Signal Process., Oct. 2018.
28ICC, 2019

Rui Zhang, National University of Singapore
UAV-mounted Aerial BS: Practical Realizations Tethered UAVs: UAVs connected with ground platform by cables (for power and/or
data backhaul) Examples: AT&T’s “flying cell-on-wings (COWs)”, Facebook’s “Tether-Tenna”, EE’s “Air
Masts” Untethered UAVs: Wireless, free-fly drones Examples: Nokia’s flying-cell (F-Cell) and Facebook’s Aquila
AT&T’s flying COW Nokia’s F-Cell
29
Cable
Source: http://www.zdnet.com/article/at-t-completes-its-first-flying-cow-test-flight/https://www.fiercewireless.com/tech/nokia-bell-labs-uses-drone-to-deliver-breakthrough-f-cell-to-office-rooftop
UAV-Assisted Wireless Communication
ICC, 2019

Outline Introduction
UAV Communication Fundamentals Channel model Antenna model UAV energy consumption model Performance metric Mathematical formulation
UAV-Assisted Wireless Communications
Cellular-Connected UAV
Extensions and Future Work
ICC, 2019 30

UAV Channel Modelling: An OverviewRui Zhang, National University of Singapore
31
UAV Channel Model
ICC, 2019
UAV-UAV UAV-GroundBS-UAV UAV-terminal
Large-scale: PL + shadowing
Free-space path loss model
Customized models for UAV-ground links
Small-scale: multipath fading
Usually negligible
Rayleigh, Rician, Nakagami-m
Rayleigh, Rician, Nakagami-m
Generic narrowband (frequency-flat) fading channel model
Large-scale gain Small-scale fading

Customized Models for UAV-Ground Channels Rui Zhang, National University of Singapore
Customized models to reflect different propagation environment with varying UAV altitude/locations
Three typical categories: Free-space path loss model Altitude/angle-dependent channel parameters
• Altitude/height-dependent path loss exponent, Rician factor…• Elevation angle-dependent path loss exponent, Rician factor…• Depression angle-dependent excess path loss
Probabilistic LoS channel model • Elevation angle-dependent probabilistic LoS model• 3GPP BS-UAV model
Other models
32
UAV Channel Model
ICC, 2019

Free-Space Path Loss ModelRui Zhang, National University of Singapore
Channel power inversely proportional to distance square
No shadowing or small-scale fading Proposed scenarios: BS-UAV and UAV-terminal channels in rural area
and/or with sufficiently high UAV altitude Pros:
Simple, channel highly predictable Useful for offline UAV trajectory design
Cons: Oversimplified in urban environment Fails to model change of propagation environment at different UAV
altitude/locations
33
UAV Channel Model
ICC, 2019

Altitude/Height-Dependent Channel ParametersRui Zhang, National University of Singapore
Channel modelling parameters are functions of UAV altitude Altitude-dependent path loss exponent, shadowing variance, Rician
factor,…
Proposed application scenarios: BS-UAV channels in urban/suburban area Pros:
Captures environmental variations as altitude changes Useful for theoretical performance analysis
Cons: Fails to model the change of propagation condition with horizontal fly
34
UAV Channel Model
ICC, 2019
R. Amorim et al., “Radio channel modeling for UAV communication over cellular networks,” IEEE Wireless Commun. Lett., Aug. 2017.

Elevation Angle-Dependent Channel ParametersRui Zhang, National University of Singapore
Channel modelling parameters are functions of elevation angle Elevation angle-dependent path loss exponent, Rician factor,… Proposed scenarios: BS-terminal channels in urban/suburban area Pros:
Captures environmental variations with 3D flying Useful for theoretical performance analysis
35
UAV Channel Model
ICC, 2019
Cons: Further experimental
verification required
M. M. Azari, F. Rosas, K.-C. Chen, and S. Pollin, “Ultra reliable UAV communication using altitude and cooperation diversity,” IEEE Trans. Commun., Jan. 2018.

Depression Angle-Dependent Excess Path Loss ModelRui Zhang, National University of Singapore
Excess path loss on top of conventional terrestrial path loss Excess path loss is a function of depression (elevation) angle
Proposed scenarios: BS-UAV channels in suburban area
36
UAV Channel Model
ICC, 2019
A. Al-Hourani and K. Gomez, “Modeling cellular-to-UAV path-loss for suburban environments,” IEEE Wireless Commun. Lett., pp. 82–85, Feb. 2018.
Pros: Applicable for both positive
and negative angles Cons:
Difficult for performance analysis

Elevation Angle-Dependent Probabilistic LoS ModelRui Zhang, National University of Singapore
Separately model LoS and NLoS propagations LoS probability increases with elevation angle
Proposed scenarios: UAV-GT channel in urban environment with statistical information of building height/distribution
Pros: Useful for theoretical performance analysis Cons:
Models in statistical sense only, may fail in actual environment Needs experimental verification
37
UAV Channel Model
ICC, 2019
A. Al-Hourani, S. Kandeepan, and S. Lardner, “Optimal LAP altitude for maximum coverage,” IEEE Wireless Commun. Lett., Dec. 2014.

Average Channel Power vs AltitudeRui Zhang, National University of Singapore
38
UAV Channel Model
ICC, 2019
Tradeoff: higher altitude, increased LoS probability but longer link distance
Y. Zeng, Q. Wu, and R. Zhang, “Accessing from the Sky: a tutorial on UAV communications for 5G and beyond,’’ submitted to Proceedings of the IEEE, Invited Paper, available on arXiv

3GPP BS-UAV ModelRui Zhang, National University of Singapore
Separately model LoS and NLoS propagations LoS probability and channel modelling parameters are functions of
UAV altitude and horizontal distance
Proposed scenarios: BS-UAV for Urban Macro (UMa), Urban Micro (UMi), and Rural Macro (RMa)
Pros: Comprehensive models for path loss, shadowing and small-scale fading Useful for numerical simulation
Cons: Too complicated for theoretical performance analysis and trajectory optimization
39
UAV Channel Model
ICC, 2019
3GPP TR 36.777: “Technical specification group radio access network: study on enhanced LTE support for aerial vehicles”, Dec. 2017.

Other Models and Future WorkRui Zhang, National University of Singapore
Modified log-distance path loss model with a correction for flight direction
3D geometry-based stochastic MIMO UAV channel model Two-ray channel model Tapped delay line model for wide-band UAV communicationMassive MIMO UAV channel modelMillimeter wave UAV channel model
40
UAV Channel Model
ICC, 2019
D. W. Matolak and R. Sun, “Air-ground channel characterization for unmanned aircraftsystems–Part III: the suburban and near-urban environments,” IEEE Trans. Veh. Tech.,Aug. 2017.

Antenna ModelRui Zhang, National University of Singapore
Isotropic Equal transmit/receive power in all directions Spherical radiation pattern in 3D Hypothetical
Directional antenna with fixed radiation pattern Fixed antenna gain given azimuth/elevation angles By designing antenna geometry, e.g., dish, horn, or using Antenna array with fixed phase shifting
Active antenna arrays Active elements with dynamically controllable phase/magnitude Multi-antenna beamforming/precoding and combining MIMO (similar to terrestrial MIMO communications)
41
Antenna Model
ICC, 2019

Cellular BS 3D Directional Antenna ModelRui Zhang, National University of Singapore
Cellular BS antennas are typically down-tilted electrically/mechanically Electrical down-tilt: vertical ULA with fixed phase shifting
42
Antenna Model
ICC, 2019
Two-lobe approximation:

UAV 3D Directional Antenna ModelRui Zhang, National University of Singapore
UAV main beam directly beneath the aircraft
43
Antenna Model
ICC, 2019
Two-lobe approximation:
ψ𝐻𝐻𝑈𝑈
𝑟𝑟

UAV Energy Consumption ModelUAV Energy Model
Limited on-board energy: critical issue in UAV communication, for both UAV as user or BS/relay
UAV energy consumption: Propulsion energy >> Communication energy Empirical and Heuristic Models:
Empirical model based on measurement result Fuel cost modelled by L1 norm of control force Fuel cost proportional to the square of speed
Analytical Model Closed-form model based on well-established results in aircraft literature Power as a function of speed and acceleration: fixed-wing or rotary-wing
44ICC, 2019
Rui Zhang, National University of Singapore

UAV Energy Model (Fixed-Wing) Forces on UAV: weight (W), lift (L), drag (D), and thrust (F) Fixed-wing propulsion power (Straight and level flight)
Parasite power: overcome parasite drag caused by the moving of aircraft Induced power: overcome induced drag resulted from the lift force
45
Y. Zeng and R. Zhang, "Energy-Efficient UAV Communication with Trajectory Optimization," IEEE Trans. Wireless Commun., June 2017.
UAV Energy Model
ICC, 2019
Rui Zhang, National University of Singapore

UAV Energy Model (Rotary-Wing) Rotary-wing propulsion power (Straight and level flight)
46
Y. Zeng, J. Xu, and R. Zhang, “Energy minimization for wireless communication with rotary-wingUAV,” IEEE Trans. Wireless Commun., Apr. 2019.
UAV Energy Model
ICC, 2019
Rui Zhang, National University of Singapore

Maximum-Endurance and Maximum-Range Speed Maximum-endurance (ME) speed
Maximum-range (MR) speed
47
Energy per unit distance
UAV Energy Model
ICC, 2019
Rui Zhang, National University of Singapore

Energy Model Comparison: Fixed-Wing vs. Rotary-WingUAV Energy Model
ICC, 2019 48
Fixed-Wing Rotary-Wing
Convexity with respect to 𝑉𝑉 Convex Non-convex
Components Induced and parasite Induced, parasite, and blade profile
𝑉𝑉 = 0 Infinity Finite
Rui Zhang, National University of Singapore

Energy Model with General Level Flight (Fixed-Wing)UAV Energy Model
Change in kinetic energyWork required to overcome air resistance
Only depends on speed and centrifugal acceleration (causing heading change)
Independent of actual location or tangential acceleration (causing speed change)
Work-energy principle interpretation
ICC, 2019 49
𝒂𝒂(𝑡𝑡)
𝒗𝒗(𝑡𝑡)
𝒂𝒂⊥
(𝑡𝑡)
𝒂𝒂||(𝑡𝑡)
𝒂𝒂⊥𝟐𝟐 (𝑡𝑡)
Rui Zhang, National University of Singapore

UAV Communication: Performance MetricPerformance Metric
Signal to interference-plus-noise ratio (SINR) Outage/coverage probability Communication throughput/delay Spectral/energy efficiency All dependent on UAV location/trajectory
ICC, 2019 50
Rui Zhang, National University of Singapore

Performance Metric: Expected Communication Rate
ICC, 2019 51
Ground node location: 𝒘𝒘𝑘𝑘 ∈ 𝑅𝑅3, UAV trajectory: 𝒒𝒒 𝑡𝑡 ∈ 𝑅𝑅3, 0 ≤ 𝑡𝑡 ≤ 𝑇𝑇
UAV-GN distance: 𝑑𝑑𝑘𝑘 𝑡𝑡 = 𝒒𝒒 𝑡𝑡 − 𝒘𝒘𝑘𝑘 , elevation angle: 𝜃𝜃𝑘𝑘 𝑡𝑡 = sin−1 𝐻𝐻𝑢𝑢(𝑡𝑡)𝑑𝑑𝑘𝑘(𝑡𝑡)
Channel model: Large-scale channel power gain model:
Elevation angle-dependent LoS probability
Two levels of randomness: random LoS link and random small-scale fading Expected channel power gain:
q(t): trajectory
wk
HU(t)𝜃𝜃𝑘𝑘(𝑡𝑡)
dk(t)
Performance Metric Rui Zhang, National University of Singapore

ICC, 2019 52
Communication rate: Average aggregated communication rate:
Trajectory affects both link distance and LoS probability Rate approximation:
Approximation accuracy depends on propagation environment. It becomes exact for free-space channel model.
Performance Metric: Expected Communication Rate
q(t): trajectory
wk
HU(t)𝜃𝜃𝑘𝑘(𝑡𝑡)
dk(t)
Performance Metric Rui Zhang, National University of Singapore

Joint Trajectory-Communication Optimization: Generic Formulation
ICC, 2019 53
𝒒𝒒(𝑡𝑡): trajectory
𝒓𝒓(𝑡𝑡): commun. resource
U: utility functions, e.g., communication rate, SINR, coverage probability, spectrum/energy efficiency
fi: trajectory constraints, e.g., speed constraint, obstacle/collision avoidance gi: communication resource constraints, e.g., power, bandwidth hi: coupled constraints, e.g., interference temperature, minimum SINR
requirement
Mathematical Formulation Rui Zhang, National University of Singapore

Practical Constraints on UAV Trajectory
ICC, 2019 54
Maximum/minimum altitude:
Initial/final status:
Maximum/minimum speed:
Maximum acceleration:
Obstacle avoidance:
Collision avoidance:
No-fly zone (cubic):
Mathematical Formulation Rui Zhang, National University of Singapore

Fundamental Tradeoffs in UAV Trajectory and Communication Design
55
Throughput-Delay Tradeoff Throughput-Energy Tradeoff Delay-Energy Tradeoff
Q. Wu, L. Liu, and R. Zhang, “Fundamental tradeoffs in communication and trajectory design for UAV-enabled wireless network,” IEEE Wireless Communications, Feb. 2019.
ICC, 2019
Mathematical Formulation Rui Zhang, National University of Singapore

Conclusions of Part I Rui Zhang, National University of Singapore
56
Integrating UAVs into 5G and beyond: a new and promising paradigm to embrace the forthcoming IoD (internet-of-drones) era
Cellular-Connected UAV: UAV as aerial user
UAV-Assisted Wireless Communication: UAV as BS/relay/AP
UAV Communication Fundamentals Channel/antenna/energy models Performance metrics and mathematical formulation for
communication and trajectory co-design Fundamental throughput-delay-energy tradeoffs
More details will be given next and much more to be done …ICC, 2019

Outline Introduction
UAV Communication Fundamentals
UAV-Assisted Wireless Communications Performance analysis UAV placement Joint communication and trajectory optimization Energy-efficient UAV communication
Cellular-Connected UAV
Extensions and Future Work
ICC, 2019 57

UAV-Assisted Communications: Basic Models
ICC, 2019 58
Downlink
v
u1
s1
v1v2
s2
u2
Multi-UAV Interference Channel
Interference
S1 D1
s1s1
Relaying
u1 u2
s
v
Multicasting
u1 u2
s1s2
v
u1 u2
s1 s2
Uplink
v
UAV-Assisted Communications Yong Zeng, The University of Sydney

Performance analysis Static UAV platform
• Deterministic modelling of UAV location• Stochastic modelling of UAV location: 2D/3D Poisson Point Process; Binomial
Point Process for small-size UAV network Flying UAV platform
• Deterministic modelling of UAV trajectory: circular/straight• Stochastic modelling of UAV trajectory: stochastic trajectory process
UAV placement No user location information (ULI): maximize covered area Perfect ULI: maximize number of covered users, communication throughput,
minimize number of UAVs given per-user requirement Partial ULI
Trajectory and communication co-design New design DoF by trajectory optimization
Energy-efficient UAV communication
Recent Results: An Overview UAV-Assisted Wireless Communications
59ICC, 2019
Yong Zeng, The University of Sydney

UAV Placement: Spiral-Based AlgorithmUAV Placement
60
Minimize required number of UAVs to ensure all terminals are covered
Core-sets based algorithm, optimal, but with exponential complexity
Proposed spiral-based BS placement algorithm
Example with 80 terminals: Proposed spiral: 11 BSs Optimal core-sets: 11 BSs Benchmark strip-based: 13
BSs
J. Lyu, Y. Zeng, R. Zhang, and T. J. Lim, "Placement Optimization of UAV-Mounted Mobile Base Stations", IEEE Commun. Letters, Mar. 2017.
ICC, 2019
Yong Zeng, The University of Sydney

Optimal UAV Altitude with Adjustable BeamwidthUAV Placement
61
UAV antenna with adjustable beamwidth
Fly-hover-communicate protocol Downlink multicasting: altitude as high as
possible, optimal beamwidth decreases with altitude
Downlink broadcasting: altitude as low as possible, beamwidth as small as possible
Uplink multiple access: altitude/beamwidthdoesn’t matter
H. He, S. Zhang, Y. Zeng, and R. Zhang, "Joint altitude and beamwidth optimization for UAV-enabled multiuser communications," IEEE Commun. Lett., Feb. 2018.
ICC, 2019
Yong Zeng, The University of Sydney

Probabilistic LoS Channel model Large-scale channel power model for LoS and NLoS conditions
LoS probability:
Expected channel gain:
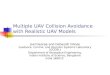
Exploiting UAV Mobility: How Much Can We Gain?
ICC, 2019 62
d2D
HU
V
𝜃𝜃
d
UAV flies towards the ground terminal
Double effects to improve the channel quality: Shorter link distance Less signal obstruction
𝜅𝜅 < 1: additional attenuation for NLoS
𝐸𝐸[𝛽𝛽(𝑑𝑑)]
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

ICC, 2019 63
0 5 10 15 20 25 30 35 40 45 50
t (s)
-140
-135
-130
-125
-120
-115
-110
-105
-100
-95
Path
loss
(dB)
LoS
NLoS
Exploiting UAV Mobility: How Much Can We Gain?
0 5 10 15 20 25 30 35 40 45 50
t (s)
-140
-135
-130
-125
-120
-115
-110
-105
-100
-95
Aver
age
chan
nel p
ower
gai
n (d
B)
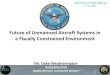
Channel gain for LoS and NLoSLoS probability
Expected channel gain
Initial distance d2D 1000 m
UAV altitude Hu 100 m
Flying speed v 20 m/s
Path loss exponent α 2.3
Reference channel gain β0
-50 dB
Probabilistic LoSmodel parameters
𝑎𝑎 = 10, 𝑏𝑏 = 0.6,𝜅𝜅 = 0.01
40 dB
23 dB
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

Exploiting UAV Mobility for Communication: Key Points
ICC, 2019 64
Depending on flying distance and propagation environment, significant gain can be achieved by exploiting UAV mobility
The gain is achieved beyond the conventional communication resource allocation
Motivate the exploitation of UAV trajectory optimization as a newdegree of freedom (DoF) for communication performance enhancement
Main philosophy: bring UAV closer to ground terminals Two related classical problems in graph theory:
Travelling Salesman Problem (TSP) Pickup and Delivery Problem (PDP)
Useful techniques for trajectory and communication co-design Block-coordinate descent Successive convex approximation
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

Path Planning: Travelling Salesman Problem
ICC, 2019 65
Travelling salesman problem (TSP): Given 𝐾𝐾 cities and the distances between each pair of cities, find the shortest route that visits each city and returns to the origin city
NP-hard problem Complexity by exhaustive search: 𝐾𝐾! Can be formulated as an integer linear programming problem Many heuristic algorithms and exact (up to tens of thousands of cities)
solutions have been proposed
u1 u2
s1 s2
Uplink/downlink
v UAV path planning: For UAV-enabled communications with ground users, determine the flying path to serve them sequentially
Intuition: fly to each user as close as possible
s3
u3
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

Path Planning: Travelling Salesman Problem
ICC, 2019 66
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

Variations of Travelling Salesman Problem
ICC, 2019 67
The standard TSP requires the traveler return to the origin city For UAV communications, the UAV may not necessarily return to the
location where it starts the mission, and the initial and/or final locations may be pre-specified
TSP Variation 1: No return TSP Variation 2: No return, specified initial and final locations 𝒒𝒒0 and 𝒒𝒒𝐹𝐹 TSP Variation 3: No return, specified initial location 𝒒𝒒0, any final location
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney
Y. Zeng, X. Xu, and R. Zhang, “Trajectory design for completion time minimization in UAV-enabled multicasting”, IEEE Trans. Wireless Commun., April 2018.

TSP Variation 1: No Return
ICC, 2019 68
Add a dummy city whose distances to all the 𝐾𝐾 cities are 0 Solve the TSP problem for the 𝐾𝐾 + 1 cities Remove the two edges associated with the dummy city
00
0
Dummy city
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

TSP Variation 1: No Return
ICC, 2019 69
Standard TSP No Return
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

TSP Variation 2: Specified Initial and Final Locations
ICC, 2019 70
Add a dummy city, whose distance to both 𝒒𝒒0 and 𝒒𝒒𝐹𝐹 set to 0 The distance to all other cities set to sufficiently large Solve the TSP for the K+1 cities Remove the two edges associated with the dummy city
0
∞
Dummy city
0
∞
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

ICC, 2019 71
No Return, any initial/final No Return, specified initial and final
TSP Variation 2: Specified Initial and Final Locations Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

Travelling Salesman Problem with Neighborhood
ICC, 2019 72
When the total operation time 𝑇𝑇 is small, the UAV may not be able to visit all users
TSP with neighborhood (TSPN): Given 𝐾𝐾 cities and the neighborhoods ofeach city, find the shortest route that visits each neighborhood once
A generalization of TSP, also NP-hard
𝒫𝒫: set of all 𝐾𝐾! possible permutations
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

Travelling Salesman Problem with Neighborhood
ICC, 2019 73
One heuristic solution First, find the visiting order based on TSP by ignoring the neighborhoods Then use convex optimization to find the optimal visiting location within
each neighborhood Update visiting order by TSP over the visiting locations. Repeat.
The neighborhood size needs to be optimized based on communication requirement
TSP TSPN
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

Pickup-and-Delivery Problem (PDP)
ICC, 2019 74
For UAV-enabled multi-pair relaying, determine the UAV flying path Information-causality constraint: UAV needs to first receive data from a
source before forwarding to its destination Pickup-and-Delivery Problem (PDP): A generalization of TSP with
precedence constraints: for each source-destination pair, visit source before destination.
NP-hard, while algorithms for high-quality solutions exist PDP with neighborhood (PDPN)
S1 S2
s1
s2
Multipair relaying
vs1
D1
D2
s2
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

UAV Path Planning with TSPN and PDPN
ICC, 2019 75
TSPN PDPN
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney
Y. Zeng, Q. Wu, and R. Zhang, “Accessing from the Sky: a tutorial on UAV communications for 5G and beyond,’’ submitted to Proceedings of the IEEE, Invited Paper, available on arXiv

Limitations of TSP/PDP For Trajectory Optimization
ICC, 2019 76
Suboptimal trajectory in general: Straight flight between waypoints only, while optimal trajectory for
communication may be curved in general Not catering to interference mitigation
Ignores various trajectory constraints: Obstacle avoidance, maximum/minimum speed, no-fly zone….
Only gives the UAV flying path, but trajectory optimization includes both path planning and speed optimization
UAV trajectory is highly coupled with communication resource allocation. Thus, a joint design is more desirable.
A general framework: joint UAV trajectory and communication resource allocation optimization, by using Successive convex approximation Block coordinate descent
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

Joint Trajectory-Communication Optimization: Generic Formulation
ICC, 2019 77
𝒒𝒒(𝑡𝑡): trajectory
𝒓𝒓(𝑡𝑡): commun. resource
The continuous-time representation of trajectory involves infinite number of variables
Discretization is necessary for optimization and computation purposes Two discretization methods: time discretization and path discretization
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

Trajectory Discretization
ICC, 2019 78
Time discretization: Time horizon [0,𝑇𝑇] discretized with sufficiently small slot length: 𝑇𝑇 = 𝑁𝑁𝛿𝛿𝑡𝑡 𝒒𝒒 𝑡𝑡 , 0 ≤ 𝑡𝑡 ≤ 𝑇𝑇, 𝒒𝒒 1 ,𝒒𝒒 2 , … …𝒒𝒒 𝑁𝑁 Linear state-space model:
Path discretization: UAV path sampled into finite line segments with small segment length 𝒒𝒒 𝑡𝑡 , 0 ≤ 𝑡𝑡 ≤ 𝑇𝑇, 𝒒𝒒1,𝒒𝒒2, … …𝒒𝒒𝑀𝑀 , 𝑇𝑇1,𝑇𝑇2, … …𝑇𝑇𝑀𝑀 𝑇𝑇𝑚𝑚: duration for the mth segment
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

Time vs Path Discretization
ICC, 2019 79
Path discretization: generalized time discretization with variable slot length
Time Discretization Path Discretization
Pros • Equal time slot length• Linear state-space representation• Incorporate maximum
acceleration constraint easily
• Fewer variables if UAV hovers or flies slowly
• No need to know T a priori
Cons • Excessively large number of time slots when UAV moves slowly
• Needs to know T a priori
• More variables if UAV flies with high/maximum speed most of the time
0 𝑇𝑇 = 𝑁𝑁𝛿𝛿𝑡𝑡Time discretization: 𝑇𝑇 must known
𝛿𝛿𝑡𝑡 2𝛿𝛿𝑡𝑡
𝒒𝒒[1] 𝒒𝒒[2] 𝒒𝒒[𝑁𝑁]……
Path discretization:𝑇𝑇 can be unknown𝒒𝒒1 ……𝑇𝑇1 𝑇𝑇2
𝒒𝒒2 𝒒𝒒𝑀𝑀
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney
𝑇𝑇 =∑𝑇𝑇𝑚𝑚

Block Coordinate Descent
ICC, 2019 80
Time or path discretization converts the problem into a more tractable form The joint trajectory and resource optimization problems are usually difficult to
be directly solved Block coordinate descent: alternately update one block of variables (say,
trajectory) with the other (resource allocation) fixed. Monotonically converge to a locally optimal solution.
Optimize 𝒒𝒒[𝑛𝑛]Optimize 𝒓𝒓[𝑛𝑛]
𝑙𝑙 = 𝑙𝑙 + 1
𝒒𝒒(𝑙𝑙)[𝑛𝑛] 𝒒𝒒(𝑙𝑙+1)[𝑛𝑛]𝒓𝒓(𝑙𝑙+1)[𝑛𝑛]
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

Successive Convex Approximation
ICC, 2019 81
Even with given resource allocation, UAV trajectory optimization is usually non-convex, and thus difficult to solve
Non-concave objective functions: e.g., rate maximization Non-convex constraints: e.g., obstacle/collision avoidance, minimum speed Successive convex approximation (SCA):
local optimization via solving a sequence of convex problems converges to a KKT solution if appropriate local bounds are found
• Convex optimization problem• Solution is feasible to the original
non-convex problem
Non-convex optimization problem
Global concave lower bound
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

Successive Convex Approximation
ICC, 2019 82
Communication rate maximization:
Minimum speed constraint:
Convex optimization based
on lower bounds
Find global concave lower
bounds
𝑙𝑙 = 𝑙𝑙 + 1
𝐴𝐴𝑘𝑘,𝐵𝐵𝑘𝑘: poisitive coefficients depending on 𝒒𝒒(𝑙𝑙)[𝑛𝑛]
𝒒𝒒(𝑙𝑙)[𝑛𝑛] 𝒒𝒒(𝑙𝑙+1)[𝑛𝑛]
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

ICC, 2019 83
Global Concave Rate Lower BoundTrajectory and Communication Co-Design Yong Zeng, The University of Sydney

UAV Trajectory Optimization (Summary)
ICC, 2019 84
TSP/PDP provide good heuristics for path planning (e.g., initial path) Joint UAV trajectory and communication design is necessary to achieve
optimality Time- and path-discretization are useful techniques to convert to problem
with finite number of variables Block coordinate descent/alternating optimization can be used to update
trajectory and resource allocation iteratively SCA is useful for trajectory optimization sub-problem: the key is to find
global concave lower bounds Block coordinate/SCA converged solution depends on trajectory/path
initialization Other useful techniques Alternating Direction Method of Multipliers (ADMM) Receding horizon/model predictive control Machine learning for online trajectory optimization
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

Case Studies Example 1: UAV-Enabled Mobile Relaying
Example 2: Multi-UAV Enabled Wireless Network
85ICC, 2019
Y. Zeng, R. Zhang, and T. J. Lim, “Throughput maximization for UAV-enabled mobile relaying systems,” IEEE Trans. Commun., Dec. 2016.
Q. Wu, Y. Zeng, and R. Zhang, “Joint trajectory and communication design for multi-UAV enabled wireless networks,” IEEE Trans. Wireless Commun., Mar. 2018.
Trajectory and Communication Co-Design Yong Zeng, The University of Sydney

System ModelUAV-Enabled Mobile Relaying
ICC, 2019 86
UAV-enabled relay moves at a constant altitude 𝐻𝐻 UAV mobility constraints: (i) Maximum speed; (ii) Initial and final location S-R and R-D channels vary with the UAV location (𝑥𝑥(𝑡𝑡),𝑦𝑦(𝑡𝑡)) Adaptive rate/power transmission by source and relay based on the
predictable channels Problem: maximize throughput via joint power allocation and trajectory
design
Yong Zeng, The University of Sydney

87ICC, 2019
Problem FormulationUAV-Enabled Mobile Relaying
UAV mobility constraints:
Channel model: assume line of sight (LoS), perfect Doppler compensation
Information-causality constraints at UAV: only information that has been received from the source can be forwarded to the destination
0 0
: maximum speed: slot index
( , ) : initial location;( , ) : final locationF F
Vnx yx y
Yong Zeng, The University of Sydney

88ICC, 2019
Problem FormulationUAV-Enabled Mobile Relaying
aggregate rate at destination
information-causality constraint
power constraint
initial location constraint
speed constraint
final location constraint
Yong Zeng, The University of Sydney

89ICC, 2019
Proposed Alternating Power and Trajectory Optimization
UAV-Enabled Mobile Relaying
(P1) is not jointly convex w.r.t. power and relay trajectory Can be approximately solved with alternating optimization Fix trajectory, power allocation is convex Fix power, trajectory optimization is still non-convex, but can be
approximately solved by SCA
Yong Zeng, The University of Sydney

90ICC, 2019
Optimal Power Allocation with Fixed TrajectoryUAV-Enabled Mobile Relaying
E.g., UAVs are deployed for surveillance, opportunistic relaying For any fixed trajectory, power allocation is convex
Staircase waterfilling with non-increasing water level at source
Staircase waterfilling with non-decreasing water level at relay
Yong Zeng, The University of Sydney

91ICC, 2019
Trajectory Optimization with Fixed PowerUAV-Enabled Mobile Relaying
Successive convex approximation (SCA) based on global concave rate lower bound
Yong Zeng, The University of Sydney

92ICC, 2019
Simulation SetupUAV-Enabled Mobile Relaying
Source and destination separated by D=2000 m Maximum UAV speed: 50 m/s Source and relay average transmission power: 10 dBm Simulation scenarios:
Optimized power with fixed trajectory Optimized trajectory with fixed power Jointly optimized power and trajectory
Yong Zeng, The University of Sydney

93ICC, 2019
Optimal Power Allocation with Fixed TrajectoryUAV-Enabled Mobile Relaying
Trajectory 1: unidirectionally towards destination Trajectory 2: unidirectionally towards source Trajectory 3: cyclic between source and destination
(a): power allocation at source for trajectory 2
(b): power allocation at relay for trajectory 2
Decreasing water level at source
Increasing water level at relay
Yong Zeng, The University of Sydney

94ICC, 2019
Throughput Comparison for Different TrajectoriesUAV-Enabled Mobile Relaying
Mobile relaying significantly outforms static relaying, if UAV trajectory is properly designed
With inappropriate flying path, mobile relaying may even perform worse than static relaying
Yong Zeng, The University of Sydney

95ICC, 2019
UAV-Enabled Mobile Relaying
Trajectories after different iterations of the proposed successive convex optimization algorithm. Large 𝑇𝑇
source node
destination node
final UAV locationinitial UAV location
Optimized Trajectory with Fixed Constant Power AllocationYong Zeng, The University of Sydney

96ICC, 2019
UAV-Enabled Mobile Relaying
Trajectories after different iterations of the proposed successive convex optimization algorithm. Small 𝑇𝑇
source node
destination node
final UAV locationinitial UAV location
Optimized Trajectory with Fixed Constant Power AllocationYong Zeng, The University of Sydney

97ICC, 2019
UAV-Enabled Mobile Relaying
Convergence
Fast convergence for the trajectory optimization algorithm
Yong Zeng, The University of Sydney

98ICC, 2019
UAV-Enabled Mobile Relaying
Joint Power and Trajectory Design via Alternating Optimization
Yong Zeng, The University of Sydney

Example 2: Multi-UAV Enabled Wireless Network
ICC, 2019 99
Q. Wu, Y. Zeng, and R. Zhang, “Joint trajectory and communication design for multi-UAV enabled wireless networks,” IEEE Trans. Wireless Commun., Mar. 2018.
Yong Zeng, The University of SydneyTrajectory and Communication Co-Design

System ModelMulti-UAV Enabled Wireless Network
ICC, 2019 100
Multi-UAV spectrum sharing, interference channel (IFC)+broadcast channel (BC)
TDMA for user communication scheduling Problem: maximize the minimum average rate via joint user scheduling and
transmit power control as well as UAV trajectory design
Yong Zeng, The University of Sydney

Problem FormulationMulti-UAV Enabled Wireless Network
ICC, 2019 101
Minimum rate requirement
UAV mobility constraint
TDMA constraints
power constraint
Initial/final location constraint
collision avoidance constraint
Yong Zeng, The University of Sydney

Multi-UAV Enabled Wireless Network
ICC, 2019 102
Proposed Solution
Block coordinate descent algorithm
Yong Zeng, The University of Sydney

Proposed Solution: Sub-problem 1Multi-UAV Enabled Wireless Network
ICC, 2019 103
Continuous relaxation on binary variables
Linear program
User Scheduling and Association Optimization
Yong Zeng, The University of Sydney

Proposed Solution: Sub-problem 2Multi-UAV Enabled Wireless Network
ICC, 2019 104
Successive convex approximation
UAV Trajectory Optimization
Yong Zeng, The University of Sydney

Multi-UAV Enabled Wireless Network
ICC, 2019 105
Proposed Solution: Sub-problem 3
Transmit Power Control
Successive convex approximation
Yong Zeng, The University of Sydney

Simulation ResultsMulti-UAV Enabled Wireless Network
ICC, 2019 106
New Interference-mitigation approach: coordinated multi-UAV trajectory design
Yong Zeng, The University of Sydney

Simulation ResultsMulti-UAV Enabled Wireless Network
ICC, 2019 107
Power control under optimized UAV trajectory
Full-power transmission for large inter-UAV distance Small/zero power for small inter-UAV distance
Yong Zeng, The University of Sydney

Simulation ResultsMulti-UAV Enabled Wireless Network
ICC, 2019 108
Throughput-delay tradeoff
Longer flight period achieves higher max-min throughput Longer flight period implies larger user delay on average
Yong Zeng, The University of Sydney

Energy-Efficient UAV Communications
Energy-Efficient UAV Communication
ICC, 2019 109
Yong Zeng, The University of Sydney
Y. Zeng and R. Zhang, "Energy-Efficient UAV Communication with Trajectory Optimization," IEEE Trans. Wireless Commun., June 2017.
Y. Zeng, J. Xu, and R. Zhang, “Energy minimization for wireless communication with rotary-wingUAV,” IEEE Trans. Wireless Commun., Apr. 2019.

Energy-Efficient UAV CommunicationsEnergy-Efficient UAV Communication
Energy: critical issue for UAV, finite endurance UAV energy consumption:
Communication energy: signal transmission/reception/processing and circuitry (extensively studied in existing literature)
Propulsion energy: maintain UAV aloft and mobile (important but with only limited work, rigorous mathematical model is needed)
UAV energy model Depends on UAV type: fixed-wing vs. rotary-wing A function of UAV velocity and acceleration
Energy-efficient UAV communications: Maximize energy efficiency (bits/Joule) given operation time T Minimize energy expenditure subject to throughput constraint Maximize throughput subject to energy constraint
ICC, 2019 110
Yong Zeng, The University of Sydney

Energy Efficiency Maximization: Circular Flight
ICC, 2019 111
Circular trajectory with radius 𝑟𝑟 and speed 𝑉𝑉 UAV energy consumption:
Optimal speed as a function of 𝑟𝑟:
Power decreases with 𝑟𝑟:
Circular flight
Yong Zeng, The University of SydneyEnergy-Efficient UAV Communication

Energy Efficiency Maximization: Circular FlightEnergy-Efficient UAV Communication
Circular flight with radius 𝑟𝑟 and optimal speed 𝑉𝑉 Energy efficiency: number of information bits per unit energy consumption
(bits/Joule)
Smaller 𝑟𝑟: Shorter link distance and higher LoS probability, thus higher communication rate, but more energy consumption
ICC, 2019 112
Yong Zeng, The University of Sydney

Energy Efficiency Maximization: General TrajectoryEnergy-Efficient UAV Communication
UAV energy consumption:
Aggregate throughput as a function of UAV trajectory
Energy efficiency in bits/Joule:
ICC, 2019 113
Yong Zeng, The University of Sydney

Energy Efficiency Maximization: General TrajectoryEnergy-Efficient UAV Communication
Maximize energy efficiency in bits/Joule via trajectory optimization
ICC, 2019 114
Non-convex, infinite number of variablesMain techniques: time discretization and Successive Convex Approximation (SCA)
Initial/final location constraint
Min./Max. speed constraint
Initial/final velocity constraint
Max. acceleration constraint
Yong Zeng, The University of Sydney

Energy Efficiency Maximization: General TrajectoryEnergy-Efficient UAV Communication
Maximize energy efficiency in bits/Joule via trajectory optimization
ICC, 2019 115
Non-convex, iteratively solved by Successive Convex Approximation (SCA)
Yong Zeng, The University of Sydney

116ICC, 2019
Simulation SetupYong Zeng, The University of Sydney
UAV altitude 100 m
𝑐𝑐1 9.26 × 10−4
𝑐𝑐2 2250Maximum endurance speed
𝑉𝑉em = 30 m/s
Minimum power consumption
100 Watt
Initial location 𝒒𝒒0 = 1000,0 𝑇𝑇
Final location 𝒒𝒒𝐹𝐹 = 0, 1000 𝑇𝑇
Initial/final velocity 𝒗𝒗0 = 𝒗𝒗𝐹𝐹 = 30𝒗𝒗0𝐹𝐹Maximum/minimum speed
𝑉𝑉max = 100 m/s𝑉𝑉min = 3 m/s
Maximum acceleration
𝑎𝑎max = 5 m/s2
Energy-Efficient UAV Communication

Simulation ResultsEnergy-Efficient UAV Communication
ICC, 2019 117
Yong Zeng, The University of Sydney

Simulation ResultsEnergy-Efficient UAV Communication
Rate-max trajectory: stay as close as possible with the ground terminal Energy-min trajectory: less acute turning EE-max trajectory: balance the two, “8” shape trajectory
ICC, 2019 118
Yong Zeng, The University of Sydney

Simulation ResultsEnergy-Efficient UAV Communication
Rate-max: fly to the ground node as soon as possible and hover around the ground terminal with the minimum required speed
Energy-min trajectory: around the power-minimum speed EE-max trajectory: speed varies based on the distance with ground node
ICC, 2019 119
Yong Zeng, The University of Sydney

Energy Minimization with Throughput ConstraintEnergy-Efficient UAV Communication
Minimize UAV energy consumption subject to throughput requirement, via joint trajectory design and communication scheduling
𝒒𝒒 𝑡𝑡 : UAV trajectory; 𝜆𝜆𝑘𝑘 𝑡𝑡 : binary scheduling variable; 𝑇𝑇𝑡𝑡: completion time Expected communication throughput for user k:
UAV energy consumption:
ICC, 2019 120
Yong Zeng, The University of Sydney

Energy Minimization with Throughput RequirementEnergy-Efficient UAV Communication
UAV communicates with multiple users, each has a throughput requirement Minimize UAV energy, via joint trajectory design and communication scheduling
ICC, 2019 121
UAV energy
Throughput constraint
Max. speed constraint
Initial/final location constraint
Scheduling variables
Yong Zeng, The University of Sydney

Proposed SolutionsEnergy-Efficient UAV Communication
The problem is non-convex, infinite number of optimization variables Solution 1: Fly-hover-communicate protocol
Communication only while hovering Optimize hovering locations, visiting order, and flying speed Optimal speed: maximum-range speed Convex optimization to find hovering locations, and use Travelling Salesman
Problem with Neighborhood (TSPN) to find visiting order Solution 2: Joint design
Path discretization (as opposed to time discretization) Successive convex approximation (SCA)
ICC, 2019 122
Yong Zeng, The University of Sydney

Fly-Hover-Communicate ProtocolEnergy-Efficient UAV Communication
Hovering location for ground node 𝑘𝑘: �𝒒𝒒𝑘𝑘 Hovering/transmission time required: Hovering and communication energy:
Flying energy:
Total energy:
ICC, 2019 123
Yong Zeng, The University of Sydney
Ground node
Hovering location
Tradeoff between hovering-and-communication energy vs. flying energy

Joint Optimization with Path Discretization and SCAEnergy-Efficient UAV Communication
Fly-hover-communicate is strictly suboptimal since no communication while flying
The optimal solution for energy minimization needs to jointly solve the following problem
ICC, 2019 124
Yong Zeng, The University of Sydney
As the mission completion time is also a variable, use path discretization method
Then apply SCA to find a KKT solution

Simulation ResultsEnergy-Efficient UAV Communication
ICC, 2019 125
Target throughput: 100 Kbits Target throughput: 10 Mbits
Yong Zeng, The University of Sydney
Low throughput requirement: straight flight High throughput requirement: fly closer to ground nodes

Simulation ResultsEnergy-Efficient UAV Communication
ICC, 2019 126
Yong Zeng, The University of Sydney
Significant performance gain over benchmark schemes (hovering at geometric center or hovering above ground nodes)

UAV-Ground Energy Trade-offYong Zeng, The University of Sydney
127
Energy-Efficient UAV Communications
D. Yang, Q. Wu, Y. Zeng, and R. Zhang, “Energy trade-off in ground-to-UAV wireless communication via trajectory design,” IEEE Trans. Veh. Techn., July 2018.
ICC, 2019

Outline Introduction
UAV Communication Fundamentals
UAV-Assisted Wireless Communications
Cellular-Connected UAV Field trials: from 2G to 4G 3GPP study Performance evaluation Advanced interference mitigation techniques QoS-aware trajectory design
Extensions and Future Work
ICC, 2019 128

Supporting Aerial Users: Field Trials from 2G to 4G
ICC, 2019 129
Yong Zeng, The University of SydneyCellular-Connected UAV: Field Trials
Approx. Time
Cellular Network Main Findings
2000’s 2G GSM GSM network can provide a usefulcomplementary channel for UAV
2011 3G UMTS 3G network could offer possible solution for non-safety-critical communications with moderate altitude
2016 4G LTE Feasibility of (semi-)autonomous UAV operation over LTE at low altitude
2016 4G LTE More detectable BSs as UAV moves higher, but also more severe interference
Y. Zeng, Q. Wu, and R. Zhang, “Accessing from the Sky: a tutorial on UAV communications for 5G and beyond,’’ submitted to Proceedings of the IEEE, Invited Paper, available on arXiv

Cellular-Connected UAV: Field Trials
Cellular-Connected UAVs: Number of Detected Cells
Field measurements by Qualcom Strong signal strength for drone UES,
despite down-tilted BS antennas Number of detected cells generally
increases with altitude Expected due to free space propagation at
higher altitude
ICC, 2019 130
Qualcom, “LTE Unmanned Aircraft Systems”, Trial Report, v1.0.1, May 2017
Yong Zeng, The University of Sydney

Recent results by 3GPP
ICC, 2019 131
Yong Zeng, The University of SydneyCellular-Connected UAV: 3GPP Study
Interference detection Uplink interference mitigation
Uplink power control: e.g., altitude-dependent compensation factors 𝛼𝛼UE
Full-dimensional MIMO (3D beamforming) Directional antenna at UE
Downlink interference mitigation Intra-site joint transmission Enhanced initial access Coordinated data and control transmission
Mobility Refining handover parameters based on airborne status, path information…
3GPP TR 36.777: “Technical specification group radio access network: study on enhanced LTE support for aerial vehicles”, Dec. 2017.

Performance Evaluation (1/7)
ICC, 2019 132
Cellular-connected UAV in 3GPP urban macro (UMa) scenario 19 sites, each constituting 3 sectors (57 cells) Inter-site distance (ISD) 500 m, cell radius 166.7 m Two different array configurations: fixed pattern versus 3D beamforming
Y. Zeng, J. Lyu, and R. Zhang, “Cellular-connected UAV: potentials, challenges and promising technologies,” IEEE Wireless Communications, Feb. 2019.
Yong Zeng, The University of SydneyCellular-Connected UAVs: Performance Evaluation

Performance Evaluation (2/7)
ICC, 2019 133
Yong Zeng, The University of SydneyCellular-Connected UAVs: Performance Evaluation

Performance Evaluation (3/7)
ICC, 2019 134
BS antenna radiation pattern (fixed pattern configuration)
Antenna main lobe down-tilted towards ground Several side lobes with reduced lobe gain as moving away from main lobe
Yong Zeng, The University of SydneyCellular-Connected UAVs: Performance Evaluation

Performance Evaluation (4/7)
ICC, 2019 135
Scenario 1: UAV with dedicated channel Focus on one particular UAV with horizontal coordinate (250 m, 100 m) One channel is allocated exclusively (interference-free) Three UAV altitudes: 1.5 m, 90 m, and 200 m
Scenario 2: Shared channel by UAV and ground user Multi-user downlink communication with both UAV and ground users All users share the same channel Total users is 20, but with varying number of aerial users (UAVs) Horizontal locations uniformly distributed Ground users: altitude fix to 1.5 m Aerial users: altitude uniform between 1.5 m and 300 m
Yong Zeng, The University of SydneyCellular-Connected UAVs: Performance Evaluation

Performance Evaluation (5/7)
ICC, 2019 136
Fixed BS pattern: Low altitude: UAV likely associated with nearby cells (cells 1, 5, 9) High altitude: UAV likely to be associated with distant cells (via antenna
side lobe) 3D beamforming: likely associate with nearby cells for all altitudes
Yong Zeng, The University of SydneyCellular-Connected UAVs: Performance Evaluation

Performance Evaluation (6/7)
ICC, 2019 137
High altitude: less SNR variation (due to reduced scattering) Worst-case SNR increases at high altitude over ground: benefit of LoS link
compensates the weak gain of antenna side lobe 3D beamforming significantly improves the performance
Yong Zeng, The University of SydneyCellular-Connected UAVs: Performance Evaluation

Performance Evaluation (7/7)
ICC, 2019 138
Sum rate for different number of UAVs with shared channel Overall spectrum efficiency degrades as number of UAVs increases Expected since aerial users suffer from more severe interference due to LoS-
dominant channels
Yong Zeng, The University of SydneyCellular-Connected UAVs: Performance Evaluation

Inter-Cell Interference Coordination (ICIC) Cellular-Connected UAV: Interference Mitigation
139
W. Mei, Q. Wu, and R. Zhang, “Cellular-connected UAV: uplink association, power control and interference coordination,” submitted to IEEE Trans. Wireless Commun. Available on arXiv
Uplink transmission from a UAV to multiple BSs, under spectrum sharing with the existing ground users
Optimize the UAV’s BS associations and power allocations to maximize the weighted sum rate of UAV and existing ground users
ICIC designs Centralized ICIC: assume a central scheduler which is able to collect all required
information from all BSs in the ICIC region (theoretical benchmark) Decentralized ICIC: divide the cellular BSs into small-size clusters and UAV exchanges
information with cluster-head BSs only The decentralized ICIC achieves the performance close to the centralized one, but
with significantly reduced signalling overhead
ICC, 2019
Yong Zeng, The University of Sydney

Air-Ground Uplink NOMA
140
W. Mei and R. Zhang, “Uplink cooperative NOMA for cellular-connected UAV,” IEEE J. Sel. Topics Sig. Process, 2019.
Uplink transmission from a UAV to BSs, under spectrum sharing with the existing ground users
Conventional multiple access techniques OMA (TDMA, OFDMA) Non-cooperative NOMA (Local SIC only)
Proposed cooperative NOMA technique Some (idle) BSs with better channel
conditions are first selected to decode the UAV’s signals
The decoded BSs then forward the signals to their backhaul-connected BSs for interference cancellation
ICC, 2019
Cellular-Connected UAV: Interference Mitigation Yong Zeng, The University of Sydney

Multi-beam UAV Transmission
141
L. Liu, S. Zhang, and R. Zhang, “Multi-beam UAV communication in cellular uplink: cooperative interference cancellation and sum-rate maximization,” submitted to IEEE Trans. Wireless Commun. Available on arXiv
Coexistence of occupied and available GBSs
Each data stream is sent to multiple available GBSs via beamforming
One-hop backhaul links between occupied and available GBSs (e.g., X-haul) are utilized for cooperative interference cancellation
Considerable performance gain (e.g., DoF gain)
ICC, 2019
Cellular-Connected UAV: Interference Mitigation Yong Zeng, The University of Sydney

QoS-Aware Trajectory DesignCellular-Connected UAV: QoS-Aware Trajectory Design
ICC, 2019 142
Ubiquitous sky coverage is difficult at the initial phase for aerial support
Exploit the fully/partially controllable UAV mobility to avoid coverage holes
Example: UAV-enabled delivery, hard constraints only on the initial and final destination
BS coverage region and UAV path depends on QoS requirement
Yong Zeng, The University of Sydney
S. Zhang, Y. Zeng, and R. Zhang, “Cellular-enabled UAV communication: a connectivity-constrained trajectory optimization perspective,” IEEE Trans. Commun. Mar. 2019 (Invited Paper).

QoS-Aware Trajectory Design: Illustrative example Cellular-Connected UAV: QoS-Aware Trajectory Design
ICC, 2019 143
Yong Zeng, The University of Sydney
𝛾𝛾1 < 𝛾𝛾2
Coverage region

QoS-Aware Trajectory Design: System ModelCellular-Connected UAV: QoS-Aware Trajectory Design
ICC, 2019 144
UAV mission: Fly from pre-determined initial location 𝑈𝑈0 to final location 𝑈𝑈𝐹𝐹 QoS requirement: A minimum SNR �̅�𝜌 needs to be maintained with the cellular network Assumption: circular coverage area by ground BS
Yong Zeng, The University of Sydney

Problem Formulation
Cellular-Connected UAV: QoS-Aware Trajectory Design
ICC, 2019 145
Mission completion time
Minimize mission completion time, subject to QoS constraint
UAV initial location constraint
UAV final location constraint
QoS constraint
(P1) is non-convex and difficult to solve, since: QoS constraint is non-convex Trajectory 𝒖𝒖(𝑡𝑡) is a continuous function of 𝑡𝑡, involving infinite # of variables
Yong Zeng, The University of Sydney

Proposed SolutionCellular-Connected UAV: QoS-Aware Trajectory Design
ICC, 2019 146
Yong Zeng, The University of Sydney
Equivalent reformulation: minimize flying distance via optimizing GBS-UAV association sequence and handover location
Construct an undirected weighted graph based on the coverage regions of each GBS

Proposed SolutionCellular-Connected UAV: QoS-Aware Trajectory Design
ICC, 2019 147
Yong Zeng, The University of Sydney
Step 1: Construct an undirected graph
Step 2: Find GBS-UAV association sequence with shortest path algorithm, as if
UAV would fly on top of GBS
Step 3: Optimize handoff locations with obtained GBS-UAV association
sequence (convex problem)

Cellular-Connected UAV: QoS-Aware Trajectory Design
ICC, 2019 148
Simulation Setup
𝑀𝑀 = 11 GBSs uniformly randomly distributed in a 10 km x 10 km square region
UAV altitude: 𝐻𝐻 = 90 m; GBS height: 𝐻𝐻𝐺𝐺 = 12.5 m
Maximum speed of UAV: 𝑉𝑉max = 50 m/s
Reference SNR at distance 𝑑𝑑0 = 1 m: 𝛾𝛾0 = 𝑃𝑃𝛽𝛽0𝜎𝜎2
= 80 dB
Benchmark trajectories:
Straight flight trajectory: UAV flies from 𝑈𝑈0 to 𝑈𝑈𝐹𝐹 in a straight line with
maximum speed 𝑉𝑉max Optimal trajectory: Optimal solution via exhaustive search over all feasible
GBS-UAV associations
Yong Zeng, The University of Sydney

Cellular-Connected UAV: QoS-Aware Trajectory Design
ICC, 2019 149
Illustration of Trajectory Designs with �̅�𝜌 = �̅�𝜌max
Maximum achievable SNR target: �̅�𝜌max = 14.69 dB
Proposed trajectory similar to optimal trajectory
Straight flight trajectory cannot satisfy the given SNR target
Yong Zeng, The University of Sydney

Cellular-Connected UAV: QoS-Aware Trajectory Design
ICC, 2019 150
Mission Completion Time versus SNR Target
Proposed trajectory design achieves near-optimal performanceMaximum SNR target for straight flight trajectory is 4.57 dB lower than the
proposed and optimal trajectory designs (10.12 dB vs. 14.69 dB)
Yong Zeng, The University of Sydney

Conclusions of Part II
ICC, 2019 151
Trajectory optimization: a new DoF for both UAV-assisted terrestrial communications and cellular-connected UAV TSP/PDP for (initial) path planning General framework with block coordinate descent and SCA Time or path discretization Shortest path algorithm, graph theory and convex optimization
Energy-efficient communication: critical due to limited onboard energy Fixed-wing and rotary-wing energy model Energy efficiency maximization given operation time Energy minimization given throughput requirement Throughput maximization given energy consumption
Cellular-connected UAV Feasible, but severe air-ground interference is the main bottleneck Practical BS cooperation via cooperate interference cancelation/NOMA 3D beamforming is promising
Yong Zeng, The University of Sydney

Outline
Introduction
UAV Communication Fundamentals
UAV-Assisted Wireless Communications
Cellular-Connected UAV
Extensions and Future Work
ICC, 2019 152

UAV-Enabled MulticastingExtensions
153
Y. Zeng, X. Xu, and R. Zhang, "Trajectory design for completion time minimization in UAV-enabled multicasting“, IEEE Trans. Wireless Commun., April 2018.
UAV-enabled multicasting with random linear network coding: common information for multiple ground nodes
Applications: public safety communication, emergency response, video streaming, intelligent transportation systems
Minimize mission completion time, while satisfying target file recovery probability (each ground node needs to have a minimum “contact” duration with the UAV)
Optimal trajectory design is challenging (NP-hard): virtual BS placement for waypoint design travelling salesman for visiting order linear programming for optimal speed
ICC, 2019
Yong Zeng, The University of Sydney

UAV-Enabled Multicasting: Optimized Trajectory
154
Benchmark: strip-based trajectoryTotal traveling distance: 13.9 kmRequired time: 279 s
Optimized trajectoryTotal traveling distance: 8.1 kmRequired time: 173.5 s
Y. Zeng, X. Xu, and R. Zhang, "Trajectory design for completion time minimization in UAV-enabled multicasting“, IEEE Trans. Wireless Commun., April 2018.
ICC, 2019
Yong Zeng, The University of SydneyExtensions

UAV Communications with Caching
155
Critical issue in UAV communication: limited UAV endurance (e.g., ~30mins) Proposed solution: exploiting ground user caching Phase 1: UAV caches files to the selected ground users Phase 2: D2D file sharing among ground users Fundamental trade-off in file caching time and file retrieval time: joint trajectory
and caching design
X. Xu, Y. Zeng, Y. L. Guan, and R. Zhang, “Overcoming endurance issue: UAV-enabled communications with proactive caching,” IEEE JSAC, June 2018.
ICC, 2019
Extensions Yong Zeng, The University of Sydney

UAV Communications with Caching
156ICC, 2019
Yong Zeng, The University of SydneyExtensions

UAV-Enabled Wireless Power Transfer (WPT)Extensions
157
J. Xu, Y. Zeng, and R. Zhang, “UAV-enabled wireless power transfer: Trajectory design and energy optimization,” IEEE Trans. Wireless Commun., Aug. 2018.
A UAV-mounted mobile energy transmitter (ET) is dispatched to deliver wireless energy to a set of on-ground energy receivers (ERs) Facilitate large-scale implementation of
future WPT systems with improved energy transfer efficiency
Optimize UAV trajectory to maximize the minimum received energy among all ERs
Main techniques: Multi-location hovering by ignoring the
maximum UAV speed constraints Successive hover-and-fly via travelling
salesman and SCA-10 -8 -6 -4 -2 0 2 4 6 8 10
x(m)
-10
-8
-6
-4
-2
0
2
4
6
8
10
y(m
)
ER locations
Multi-location hovering
Successive hover-and-fly
SCP-based trajectory
ER 1 ER 2 ER 4
ER 6
ER 7
ER 9
ER 3
ER 5
ER 8
ER 10
ICC, 2019
Yong Zeng, The University of Sydney

Secure UAV-Ground Communications
158
Physical layer security via joint transmit power control and trajectory design
G. Zhang, Q. Wu, M. Cui, and R. Zhang, Securing UAV communications via joint trajectory and power control,” IEEE Transactions on Wireless Communications, Feb. 2019.
ICC, 2019
Yong Zeng, The University of SydneyExtensions

UAV-assisted Jamming
159
Opportunistic UAV jamming to assist in secure terrestrial communication
A. Li, Q. Wu, and R. Zhang, “UAV-enabled cooperative jamming for improving secrecy of ground wiretap channel,” IEEE Wireless Communications Letters, Feb. 2019.
ICC, 2019
Extensions Yong Zeng, The University of Sydney

Future Work
Cellular-Connected UAV: Promising Research Directions New architectures/protocols for cellular-connected UAVs Field measurement and prototype for LTE/5G-connected UAVs Channel measurement and modelling for UAV-BS communications Performance analysis for 3D aerial coverage Security and safety issues of cellular systems with UAVs Spectrum management and multiple access schemes Interference mitigation for cellular-connected UAVs Cellular systems with coexisting aerial and terrestrial users 3D beamforming MIMO/massive MIMO/mmWave technologies for cellular UAV systems Offline/online UAV trajectory design with QoS constraints Cellular-enabled UAV swarm Machine learning/AI-empowered UAV trajectory and communication design ……
160ICC, 2019
Yong Zeng, The University of Sydney

UAV-Assisted Communication: Promising Research Directions New protocols and use cases for aerial communication platforms Channel measurement and modelling for UAV-terminal and UAV-UAV links Multi-UAV cooperative communication/interference management UAV-aided information dissemination/data collection/offloading UAV communication with limited buffer size/energy/wireless backhaul Throughput-delay trade-off in UAV communications Physical-layer security in UAV-ground communications Energy-efficient joint communication and trajectory optimization UAV-ground energy/throughput trade-off UAV BS/relay 3D placement and dynamic movement UAV and ground BS coexistence and spectrum sharing MIMO/massive MIMO/mmWave for UAV-assisted communications UAV meets wireless power/energy harvesting/caching/edge computing Machine learning/AI for UAV communications and networking …..
161ICC, 2019
Yong Zeng, The University of SydneyFuture Work

Thank YouQ & A ?
ICC, 2019 162