Embed Size (px)
Citation preview
A Small, Insect Inspired Robot
that Runs and Jumps Bram G. A. Lambrecht
Thesis Adviser: Dr. Roger D. Quinn
Master’s Thesis Presentation
August 6, 2004
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
Motivation for Small Robots
Platform for autonomous or intelligent
control research
Distributed robotics
Search and rescue
Exploration
Surveillance
Insect inspired research
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
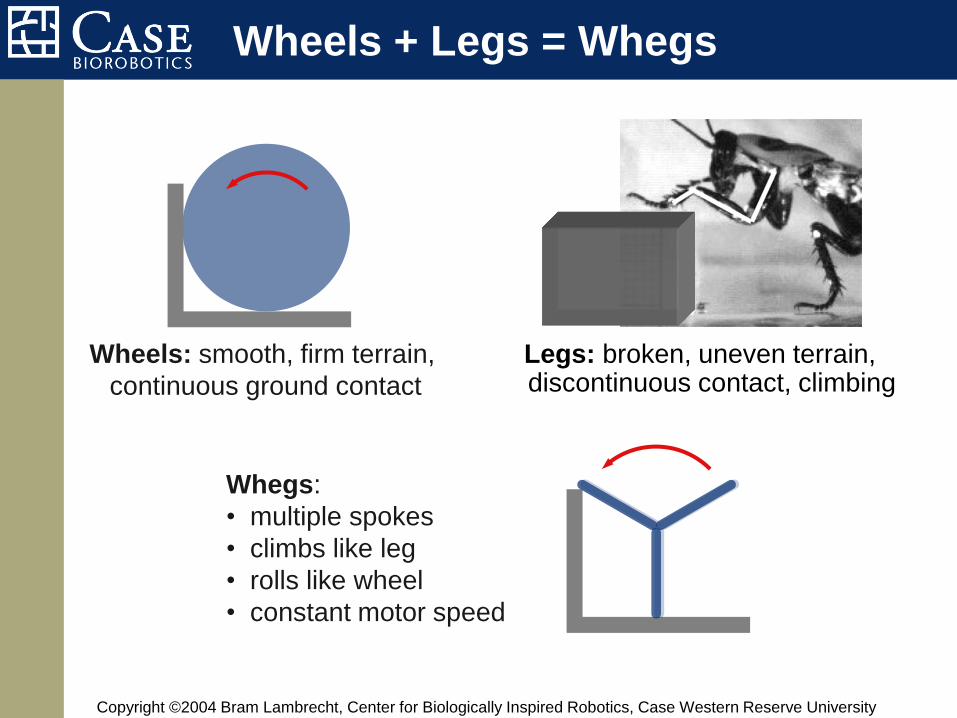
Wheels + Legs = Whegs
Legs: broken, uneven terrain, discontinuous contact, climbing
Wheels: smooth, firm terrain,
continuous ground contact
Whegs:
• multiple spokes
• climbs like leg
• rolls like wheel
• constant motor speed
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
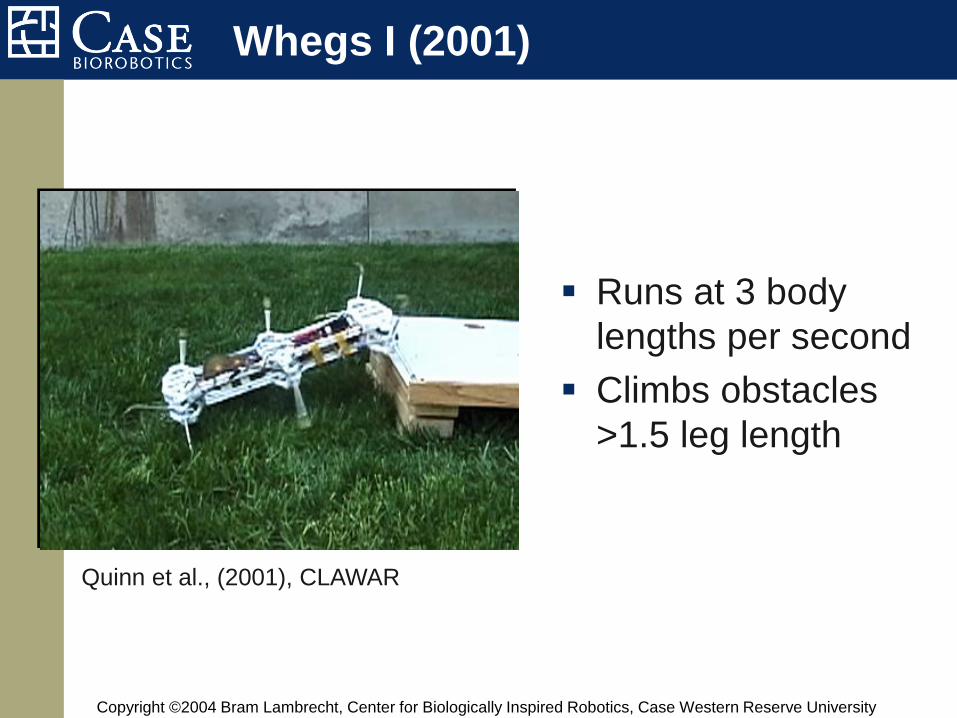
Whegs I (2001)
Runs at 3 body
lengths per second
Climbs obstacles
>1.5 leg length
Quinn et al., (2001), CLAWAR
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
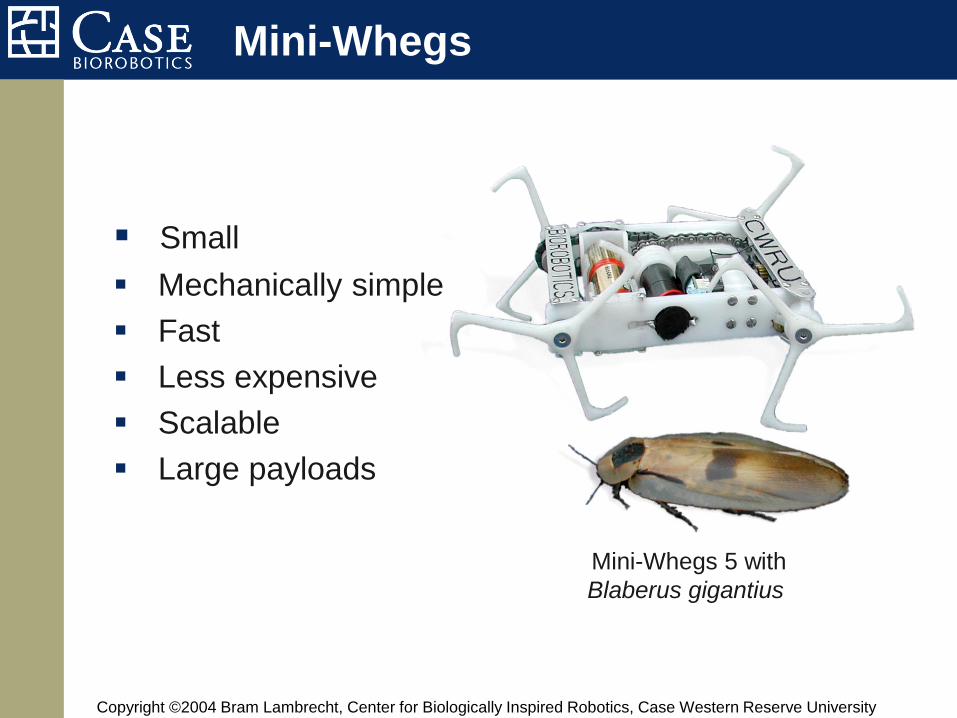
Mini-Whegs
Small
Mechanically simple
Fast
Less expensive
Scalable
Large payloads
Mini-Whegs 5 with
Blaberus gigantius
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
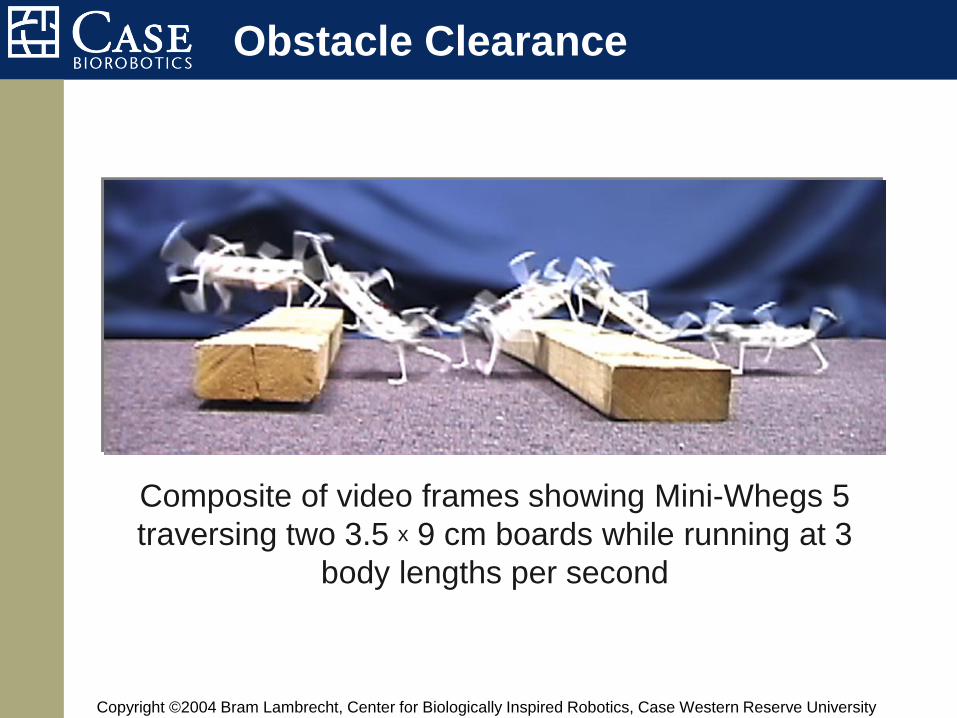
Obstacle Clearance
Composite of video frames showing Mini-Whegs 5
traversing two 3.5 x 9 cm boards while running at 3
body lengths per second
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
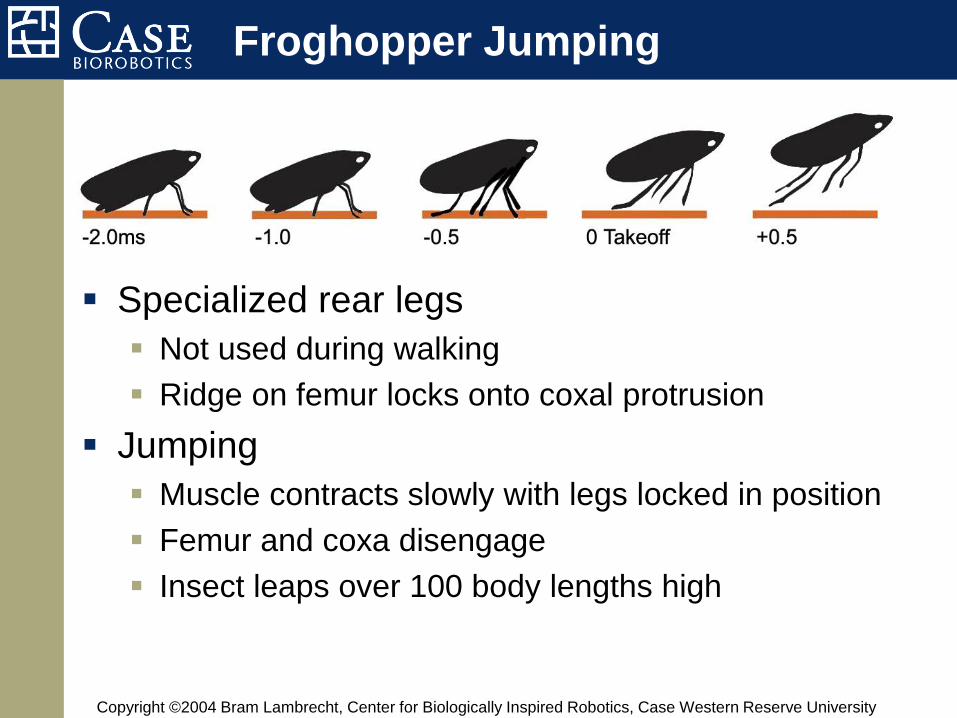
Froghopper Jumping
Specialized rear legs
Not used during walking
Ridge on femur locks onto coxal protrusion
Jumping
Muscle contracts slowly with legs locked in position
Femur and coxa disengage
Insect leaps over 100 body lengths high
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
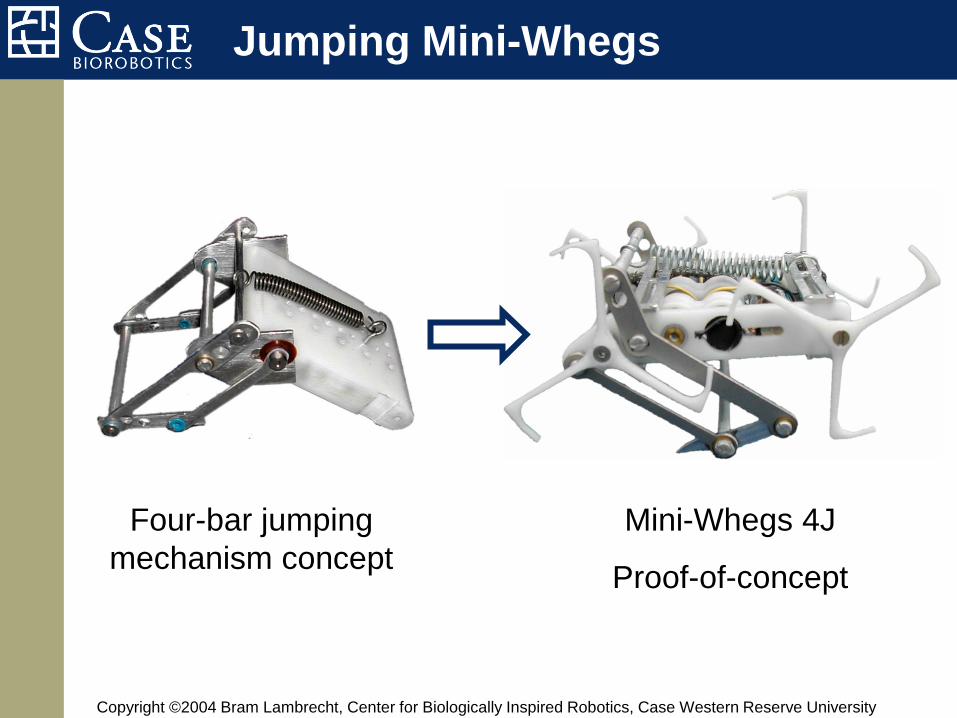
Jumping Mini-Whegs
Mini-Whegs 4J
Proof-of-concept
Four-bar jumping
mechanism concept
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
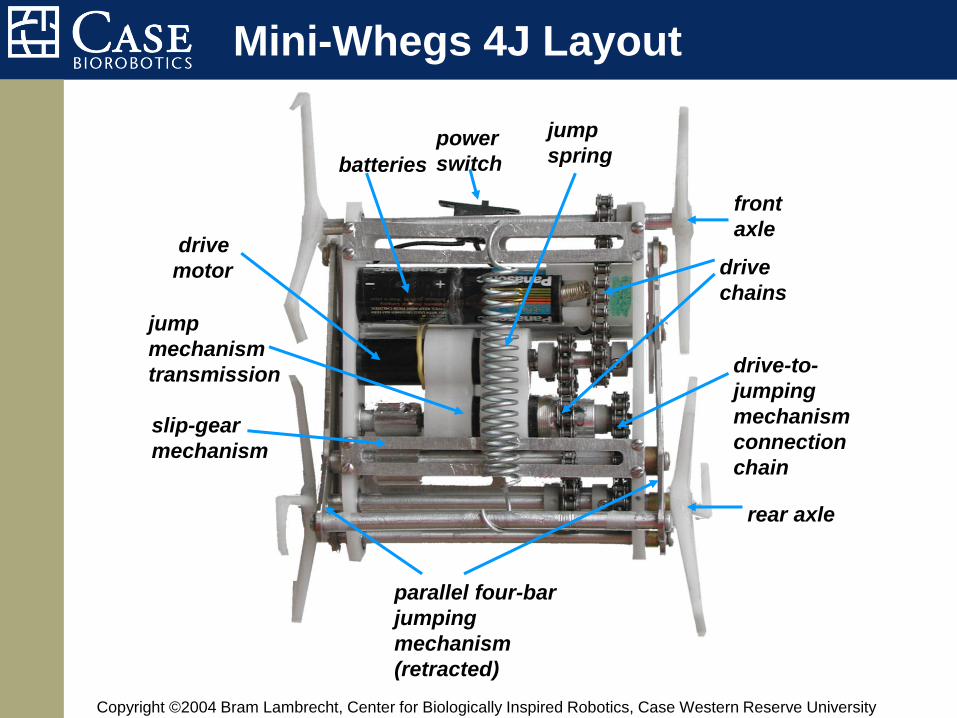
Mini-Whegs 4J Layout
drive
motor
slip-gear
mechanism
jump
mechanism
transmission
batteries
power
switch
parallel four-bar
jumping
mechanism
(retracted)
drive
chains
jump
spring
drive-to-
jumping
mechanism
connection
chain
front
axle
rear axle
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
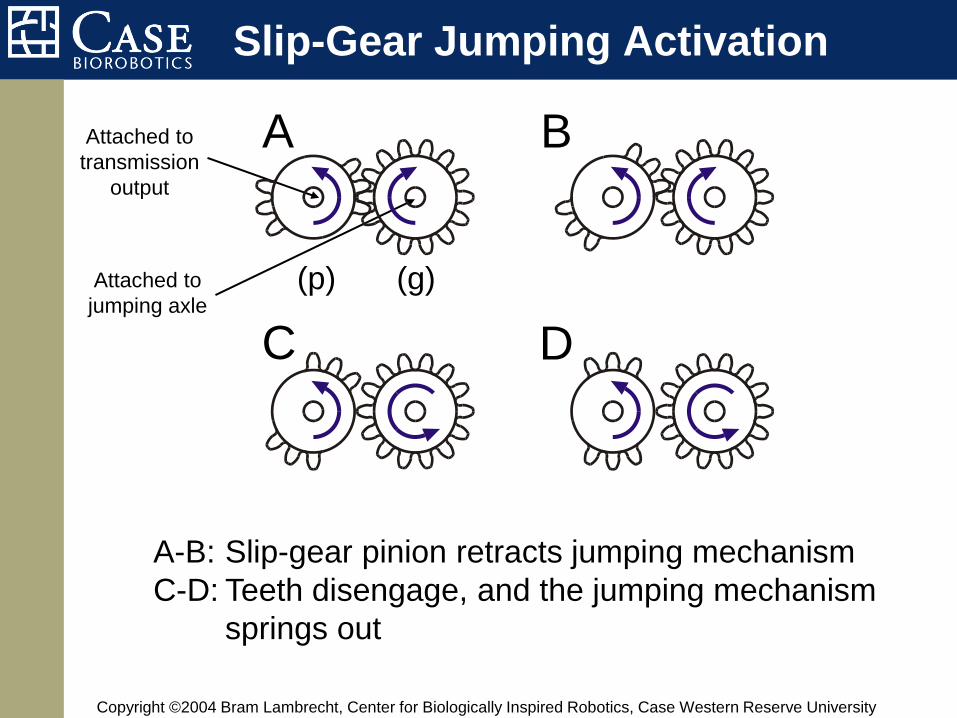
Slip-Gear Jumping Activation
Attached to
transmission
output
Attached to
jumping axle
A-B: Slip-gear pinion retracts jumping mechanism
C-D: Teeth disengage, and the jumping mechanism
springs out
A B
C D
(p) (g)
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
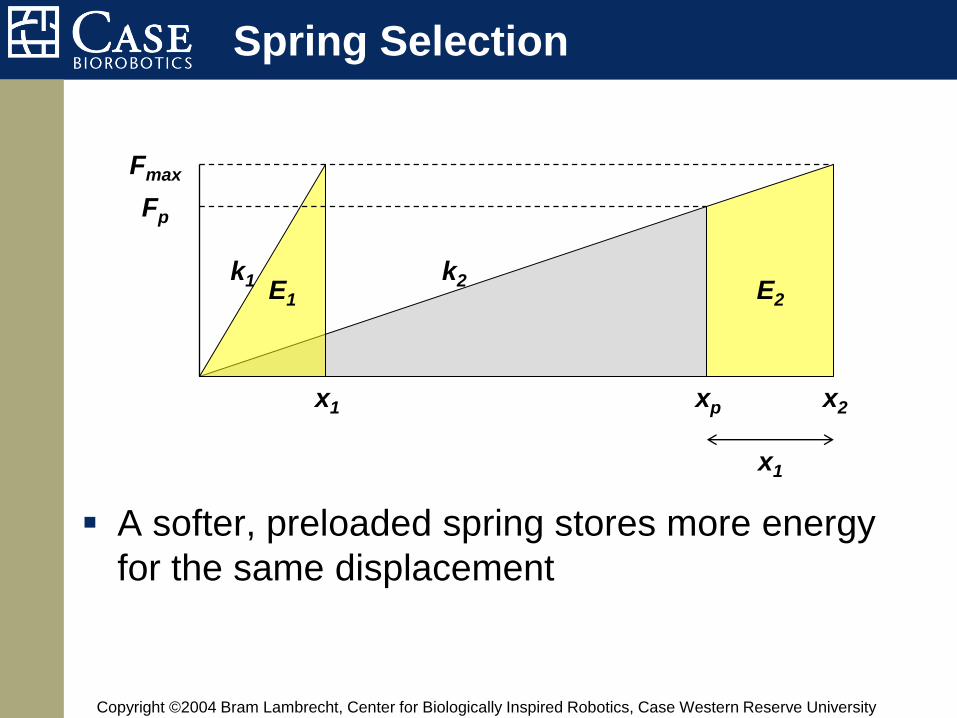
Spring Selection
A softer, preloaded spring stores more energy
for the same displacement
E2 E1
x1 xp x2
Fp
Fmax
x1
k1 k2
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
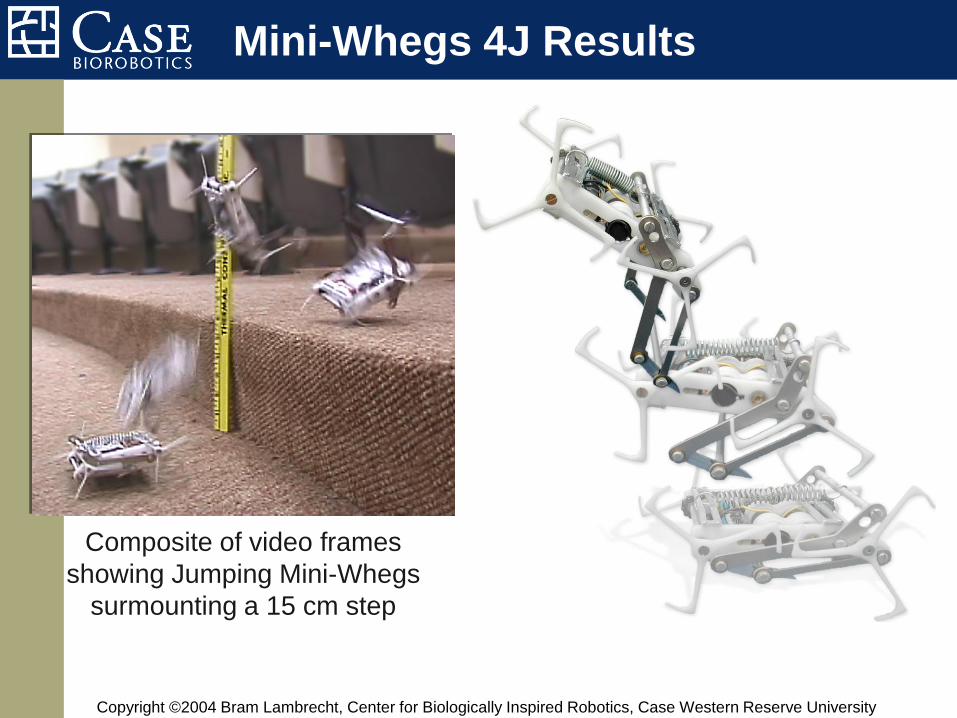
Mini-Whegs 4J Results
Composite of video frames
showing Jumping Mini-Whegs
surmounting a 15 cm step
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
Improving Existing Components
Steering mechanisms
Mini-Whegs 1, 2, and 3 use various flexible
couplings for transmitting torque to the
whegs
Springs unwind or collapse
Delrin® fatigues and snaps
Wheg appendage design
Thin spokes provide little traction…or they
get stuck and make the robot flip over.
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
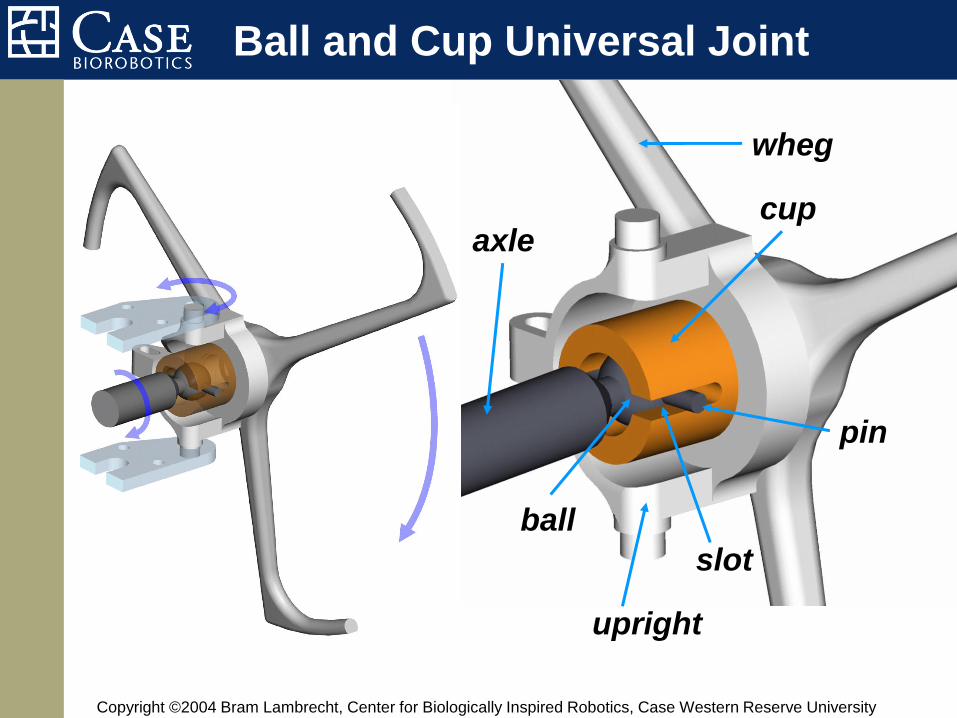
Ball and Cup Universal Joint
cup
ball
pin
slot
axle
wheg
upright
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
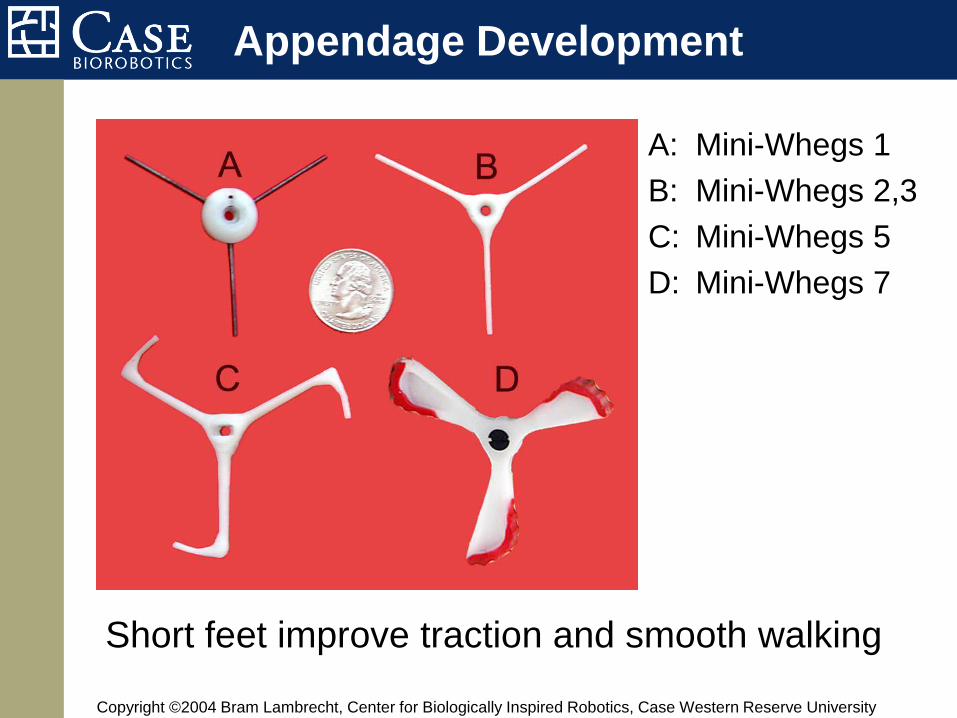
Appendage Development
A: Mini-Whegs 1
B: Mini-Whegs 2,3
C: Mini-Whegs 5
D: Mini-Whegs 7
Short feet improve traction and smooth walking
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
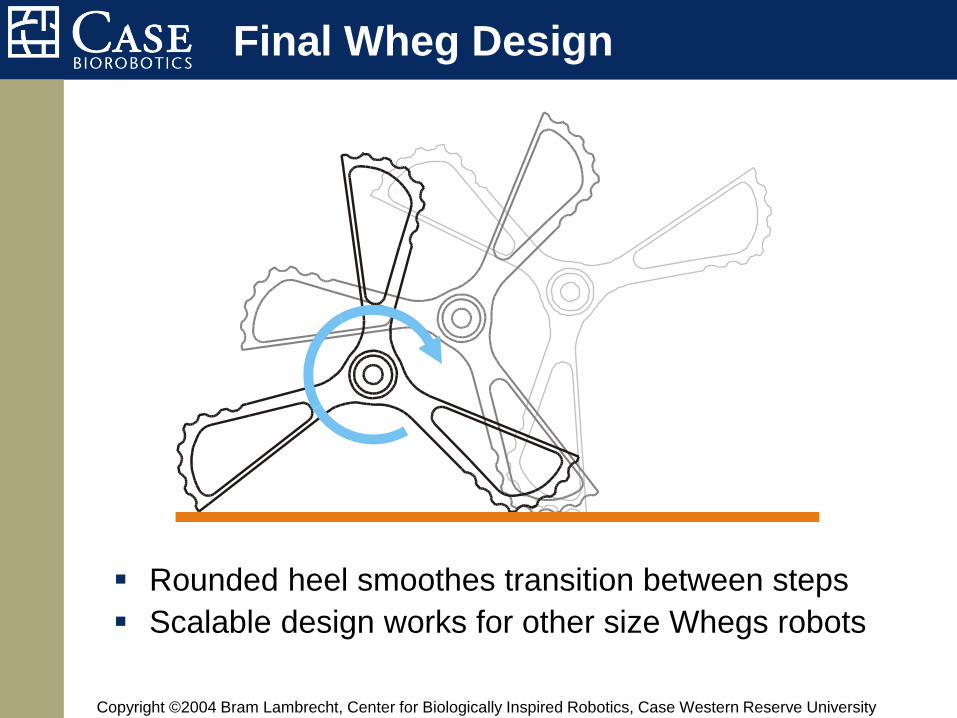
Final Wheg Design
Rounded heel smoothes transition between steps
Scalable design works for other size Whegs robots
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
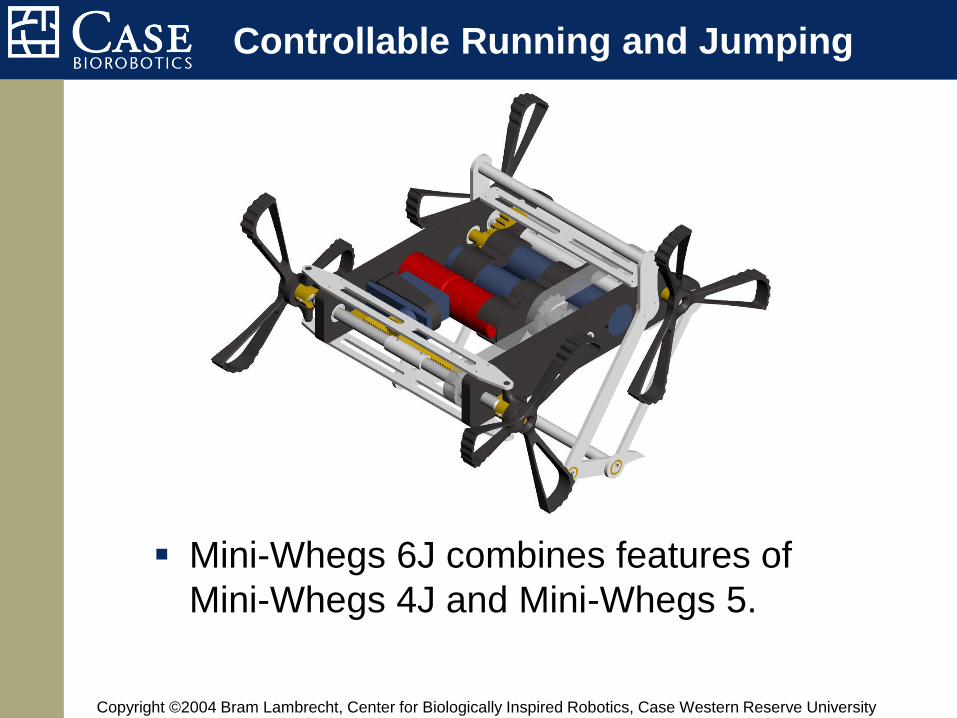
Controllable Running and Jumping
Mini-Whegs 6J combines features of
Mini-Whegs 4J and Mini-Whegs 5.
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
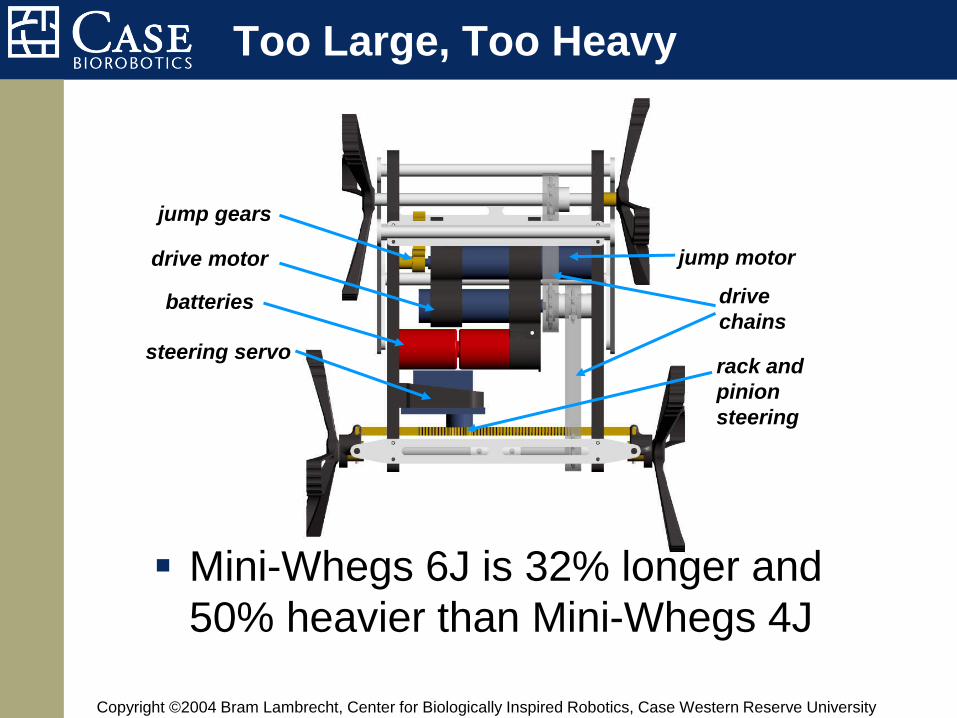
Too Large, Too Heavy
Mini-Whegs 6J is 32% longer and
50% heavier than Mini-Whegs 4J
batteries
jump gears
drive motor
steering servo
drive
chains
rack and
pinion
steering
jump motor
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
Goals for a New Mini-Whegs
Lighter
Less than 100 grams
Cheaper
Half the cost of Mini-Whegs 5
Easier to Build
More off-the-shelf components
Fewer fasteners
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
Weight Savings
Modified servo drive vs. Maxon Motor
Hollow aluminum axles
Plastic sprockets and gears
Single plastic chain
Nylon fasteners
All Delrin® frame
Single 6V 2CR-1/3N cell
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
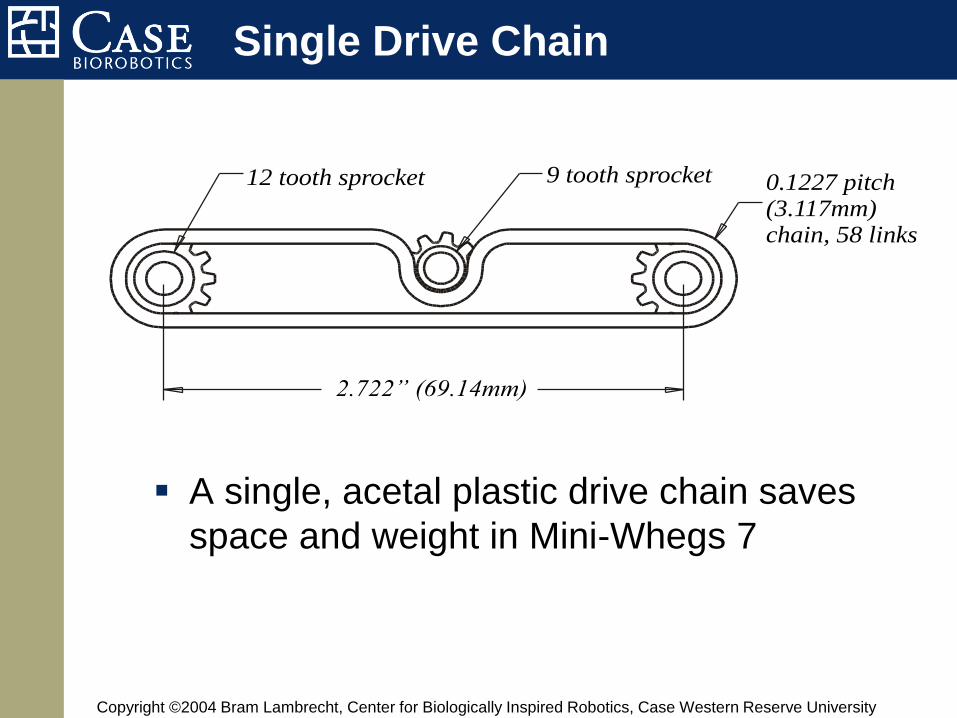
Single Drive Chain
2.722” (69.14mm)
0.1227 pitch(3.117mm)chain, 58 links
9 tooth sprocket12 tooth sprocket
A single, acetal plastic drive chain saves
space and weight in Mini-Whegs 7
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
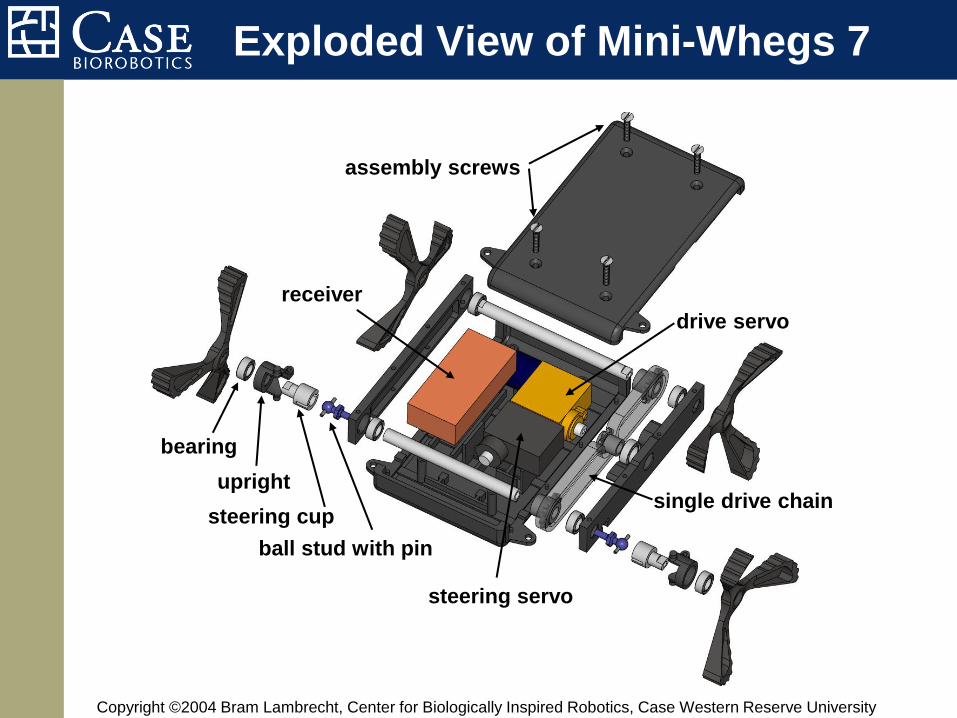
Exploded View of Mini-Whegs 7
ball stud with pin
steering cup
upright
bearing
single drive chain
steering servo
drive servo
receiver
assembly screws
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
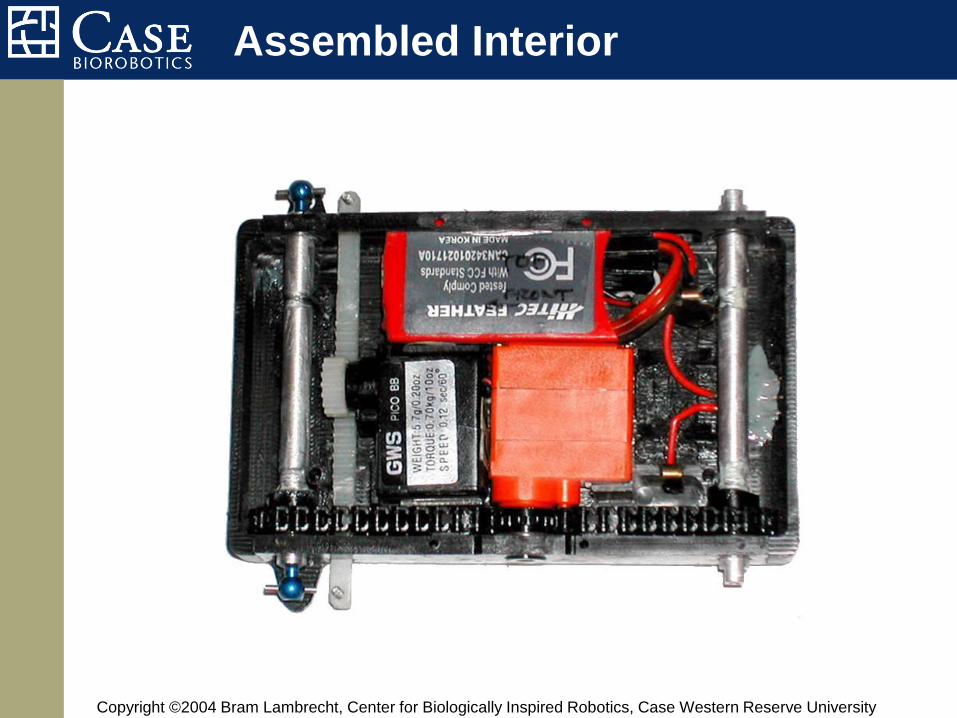
Assembled Interior
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
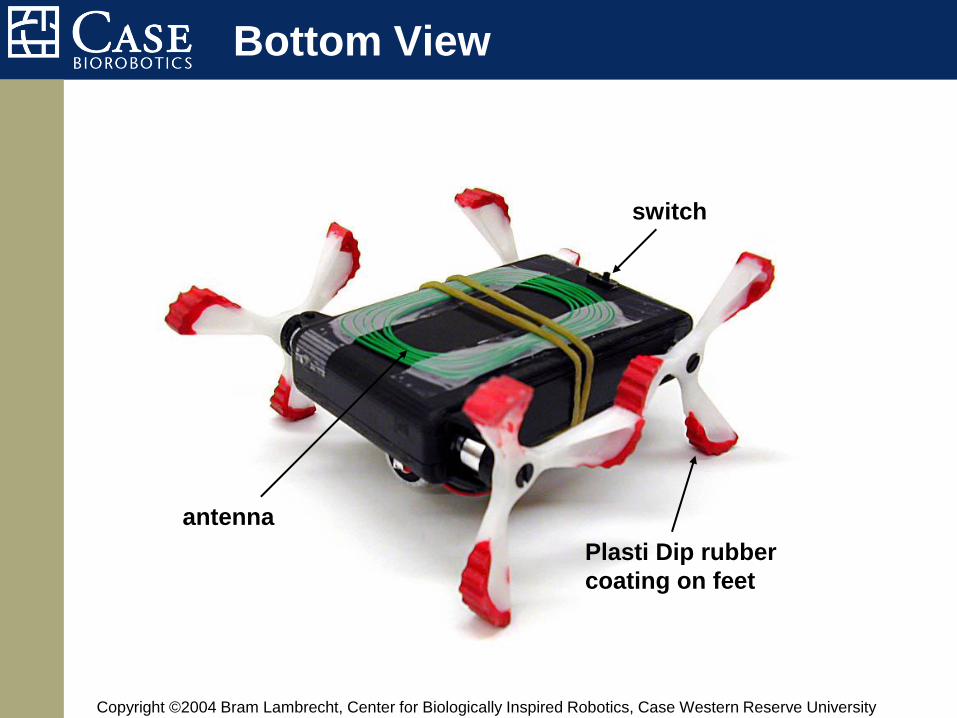
Bottom View
switch
antenna
Plasti Dip rubber
coating on feet
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
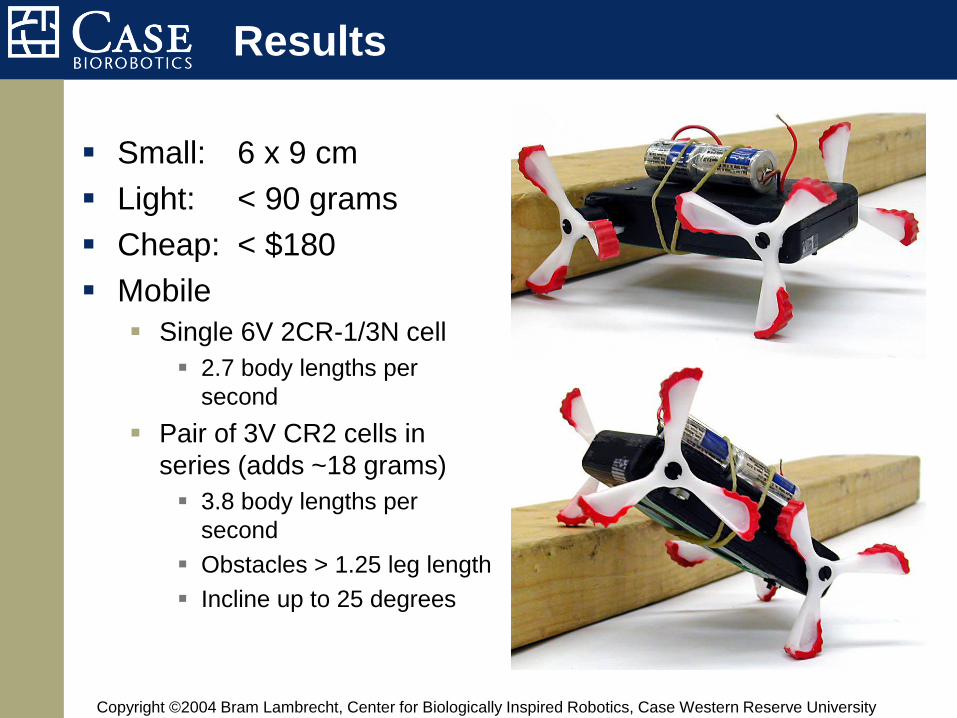
Results
Small: 6 x 9 cm
Light: < 90 grams
Cheap: < $180
Mobile
Single 6V 2CR-1/3N cell
2.7 body lengths per
second
Pair of 3V CR2 cells in
series (adds ~18 grams)
3.8 body lengths per
second
Obstacles > 1.25 leg length
Incline up to 25 degrees
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
Mini-Whegs 7 – Obstacles
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
Obstacle Clearance – Slow Motion
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
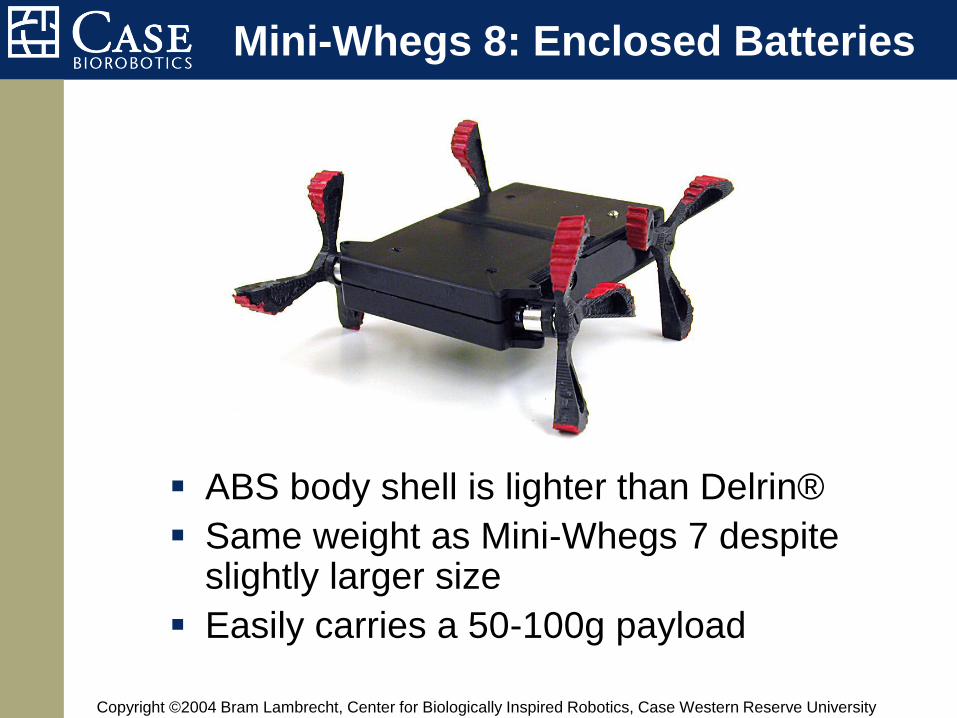
Mini-Whegs 8: Enclosed Batteries
ABS body shell is lighter than Delrin®
Same weight as Mini-Whegs 7 despite slightly larger size
Easily carries a 50-100g payload
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
Goals for New Jumping Mini-Whegs
Lightweight
Maintain weight reduction techniques of
Mini-Whegs 7
Reduce weight in jumping mechanism
components
Target weight < 200g
Small
Pack components closely
Single drive chain
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
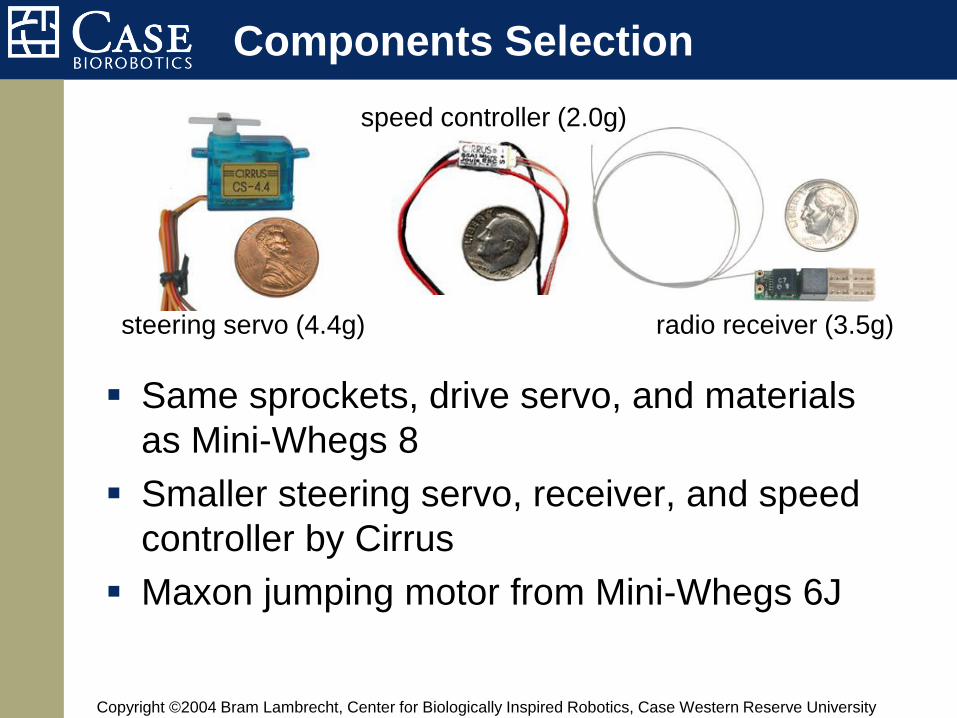
Components Selection
Same sprockets, drive servo, and materials
as Mini-Whegs 8
Smaller steering servo, receiver, and speed
controller by Cirrus
Maxon jumping motor from Mini-Whegs 6J
steering servo (4.4g)
speed controller (2.0g)
radio receiver (3.5g)
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
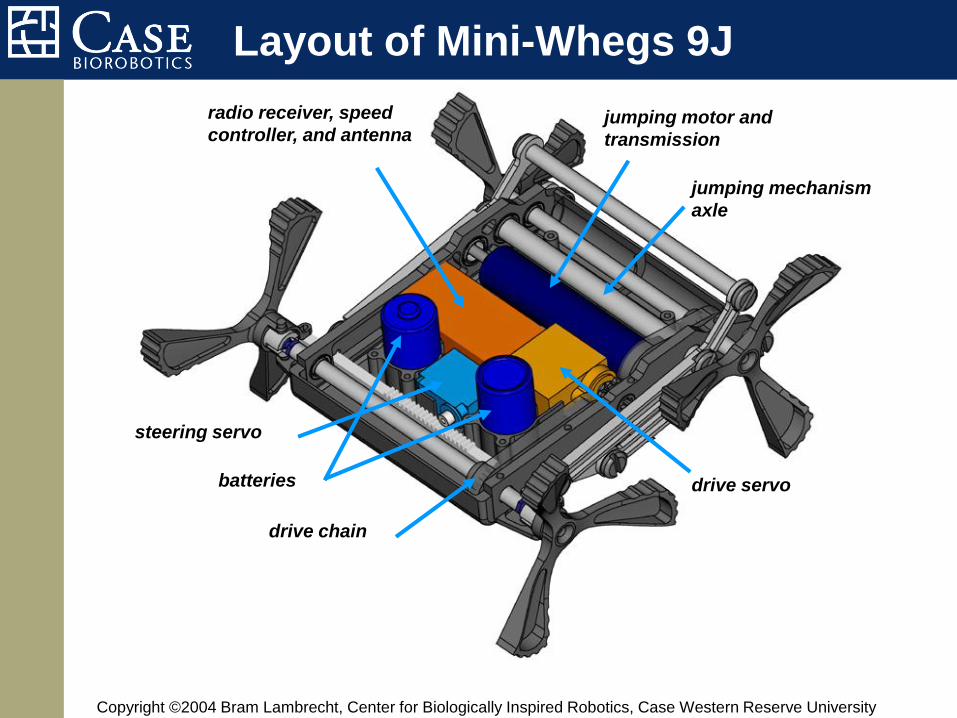
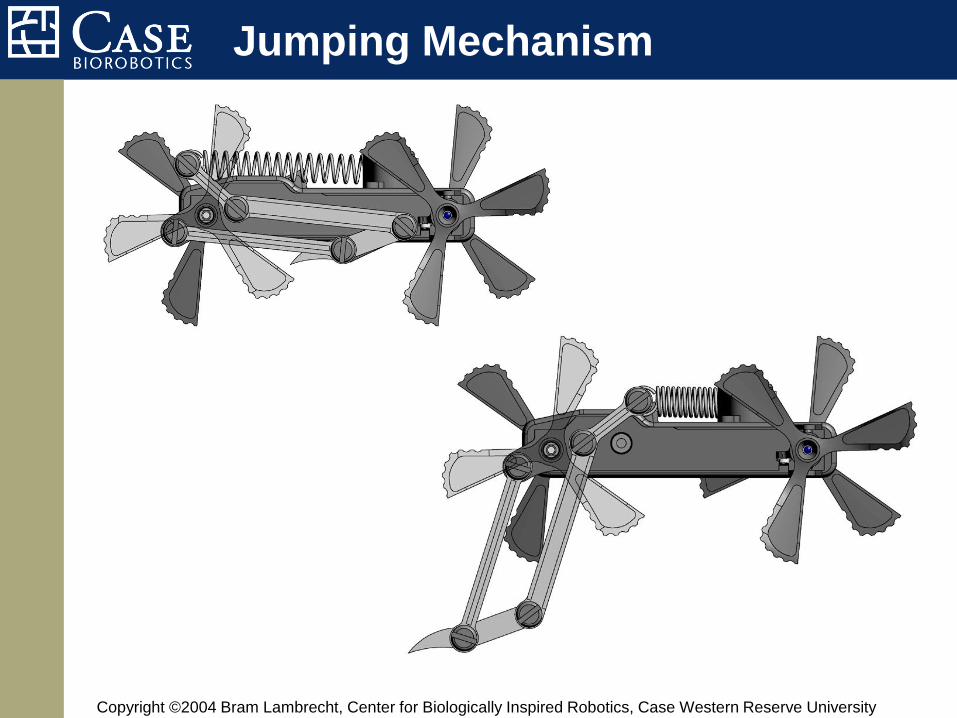
Layout of Mini-Whegs 9J
steering servo
batteries
radio receiver, speed
controller, and antenna
drive chain
drive servo
jumping motor and
transmission
jumping mechanism
axle
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
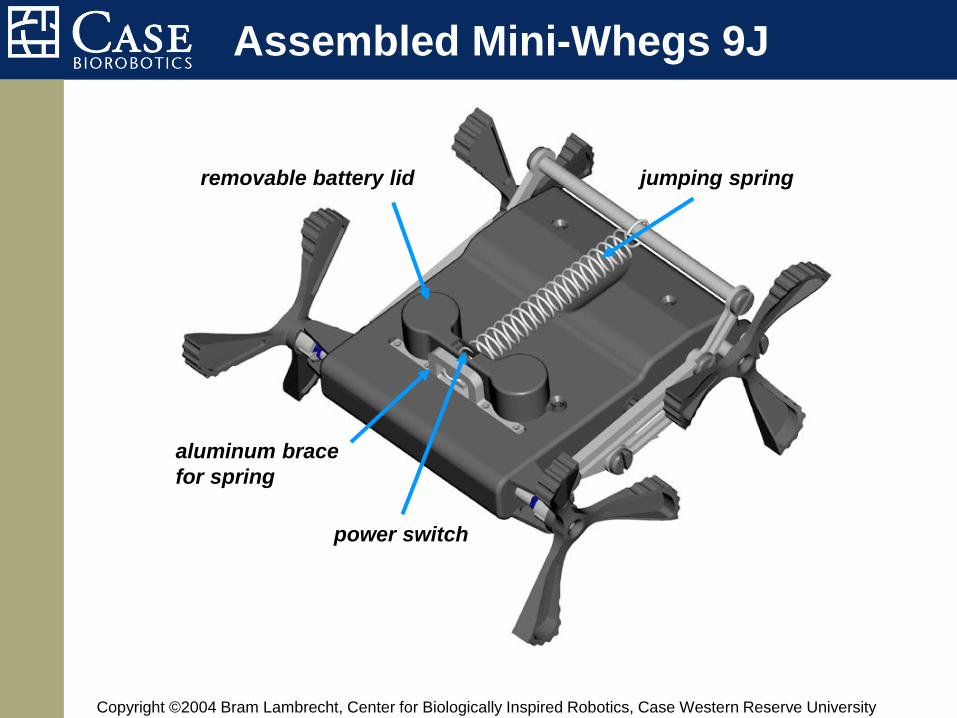
Assembled Mini-Whegs 9J
removable battery lid
aluminum brace
for spring
power switch
jumping spring
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
Jumping Mechanism
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
Mini-Whegs 9J – Jumping
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
Jumping – Slow Motion
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
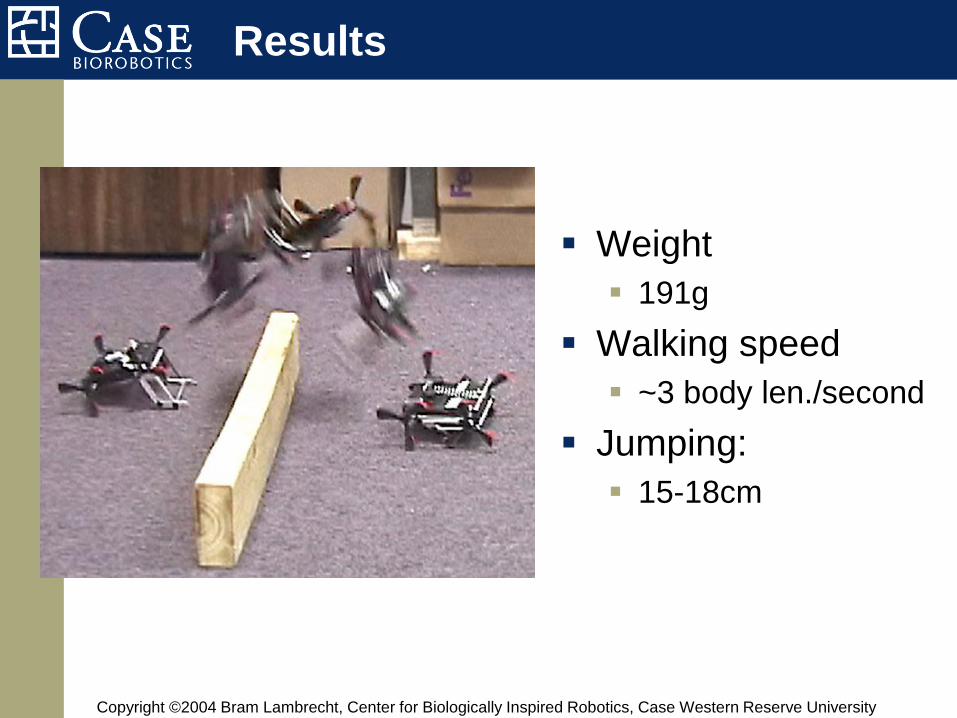
Results
Weight
191g
Walking speed
~3 body len./second
Jumping:
15-18cm
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
Future Work
Alternative motors and transmissions
More force for higher jumps
Faster walking
Torsion springs could fit entirely inside
chassis
FDM or injection molded chassis
construction
Improved control system for jumping
Sensor integration
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
Acknowledgments
Thanks to:
Roger Quinn, Malcolm Cooke, Vikas
Prakash
Jeremy Morrey, Andrew Horchler, Bill
Lewinger for previous work, ideas, and
assistance
Christie for helping make parts this summer
Everyone else who has made my
experience with the Biorobots lab fun and
rewarding
Copyright ©2004 Bram Lambrecht, Center for Biologically Inspired Robotics, Case Western Reserve University
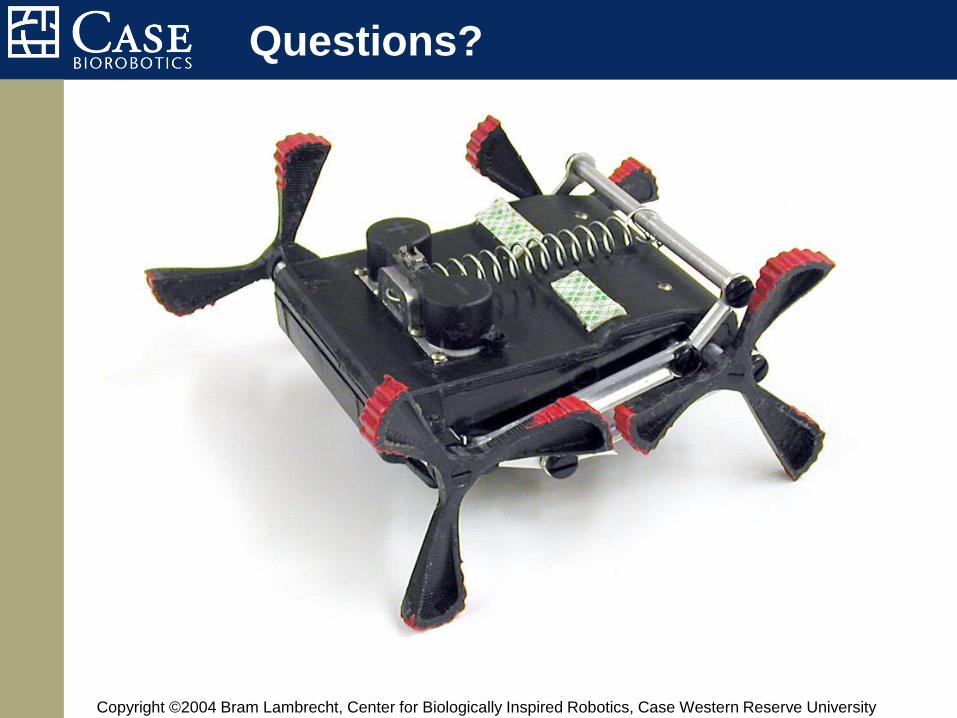
Questions?



















![{[Na1([mu]-H2O)Na2]2[(C2O4)2Cr([mu]-OH)2Cr(C2O4)2].H2O}n](https://img.pdfslide.us/doc/110x75/6286c8893ec30b1b0334325b/na1mu-h2ona22c2o42crmu-oh2crc2o42h2on-.jpg)









