Embed Size (px)
Citation preview

NASA Contractor Report 185294
,,,z/"-_3
F37/
A Physical Model for theAcousto-Ultrasonic Method
Michael T. Kiernan and John C. Duke, Jr.
Virginia Polytechnic Institute and State University
BIacksburg, Virginia
October 1990
Prepared for
Lewis Research Center
Under Grant NAG3-172
NationalAeronauticsand
SpaceAdministration
(NA_A-CR-I_5294)
ACGUSTO-ULTRASONIC
Final Report (Virginia
and State Univ,) ZTl p
A PHYSICAL MOOEL FOR THE
M_THUO Ph.D. Thesis
Polytechnic Inst.CSCL 14D
G_/JB
m
N91-12962
Unclas
0319015

/-

Table of Contents
Introduction ............................................................ I
Literature Review ........................................................ 7
Composite Materials ...................................................... 7
Basic Notation and Comdinate System ....................................... 8
Macroinechanics .. : ................................................... 14
Micromechanics . ..................................................... 15
Damage Mcchatfics .................................................... 16
Models ............................................................. 18
Wave Propagation ...................................................... 20
Unbounded Media .................................................... 20
I.inear Elastic ltomogeneous lsostropic (LEIlI) Materials ...................... 20
l)ispcrsion ......................................................... 22
l)iffraction and Interference Effects ....................................... 25
I.inear Elastic Ilomogeneous Anisotropic (LEIIA) Materials .................... 26
Other Constitutive Relations ........................................... 29
Plate Wave Equalions .................................................. 30

Isotropic Plate Waves ................................................. 31
Anisotropic Plate Waves ............................................... 44
Applications ....................................................... 47
Through Thickness Resonance ............................................ 47
Analytical Ultrasonics .................................................... 49
Acousto-ultrasonics ...................................................... 54
Early Research ....................................................... 57
AU Analysis Software ................................................ 61
Results ........................................................... 66
Current and Future State of AU Method .................................. 70
Experimental Procedure .................................................. 79
Experimental Set-up ..................................................... 82
Description of System Components .......................................... 83
Pulser/Receiving Unit .................................................. 83
Preamplifier ......................................................... 83
Transducers ......................................................... 84
Data Acquisition ....................................................... 85
Software Analysis of AU Signal ............................................. 88
Experiments ........................................................... 90
General Procedures .................................................... 92
Specific Experiments ................................................... 94
Aluminum Plate (.0625 inches thick) ...................................... 94
Aluminum Plate (.125 inches thick) ...................................... 95
Composite Plate (24-ply unidirectional Gr/Ep) .............................. 95
Composite Plate (12-ply unidirectional Gr/Ep) .............................. 97
Tapered Aluminum Plate .............................................. 97
ii

Experimenlal Results .................................................... 99
General Comments ...................................................... 99
Aluminmn Plate (.0625 inches thick) ..................................... 100
Aluminum (.125 inches thick) .......................................... 108
24 Ply Gr/Ep Plate (Unidirectional) ..................................... IIi
12 Ply Gr/F,p Plate (Unidirectional) ..................................... 124
Tapered Alumimun Plate ............................................. 132
Overview of Experimental Data ........................................ 136
Physical Unders|andlng .................................................. 138
Physic_d Problem ...................................................... 139
Signal Reception ................................................... 144
Elasticity Solutions ..................................................... 145
Point I_oad on an lsotrol)ic Plate ......................................... 146
Isotropic Plate- Distributed Load ......................................... 148
Point Loading on an Aifisotropic Plate ..................................... 151
"l'lu'ough the Thickness Transverse Resonance ................................. 157
Aluminum Plates .................................................... 158
Composite Platcs .................................................... 161
Bulk Wave l_ropagation Problem for Composite Plates ....................... 161
TTTR Frcqucncies for Composite Plates ................................. 163
Lamb Waves ......................................................... 163
Aluminum Plates .................................................... 167
Computcr Solution TectHfique ......................................... 167
Computer Results for .0625" Thick Aluminum Plate ......................... 169
Comparison of Computcr Rcsults to Experimental Results .................... 174
Effects of I,amb Waves on AU Signal .................................... 175
Composite Plates .................................................... 177
iii

178Computer Solution Technique .........................................
180ORTII.FOR ......................................................
182GENE.FOR ......................................................
183Computer Results ..................................................
Comparison of Computer Results to Expcrimental Results .................... 183
Lamb Wave Propagation and AU for Composite Plates ....................... 190
General Physical Understanding of AU Results ................................. 194
198AU Modeling .........................................................
199Simple AU Model .....................................................
201Aluminum Plate Application ............................................
Discussion of Applying Model to Composites ................................. 204
Ideas for More Advanced AU Modeling Efforts ................................ 206
2f)7Source Modeling .....................................................
207Geometric Effects ....................................................
2O8Time Domain Infonnation ..............................................
Relating AU to Damage Modeling (NDE) .................................... 2(/9
212Conclusions and Overview ................................................
213Experimental Work ...................................................
213Physical Understanding ................................................
216Implcmentation of AU ..................................................
216Practical Difficulties ...................................................
218Instrumcntation ......................................................
218Advanced Applications ................................................
219Future Work .........................................................
221Closing Remarks ......................................................
_V

References ........................................................... 223
Appendix A. (ORIN.FOR)- fi_rtran program .................................. 232
Appendix IL (GEIN.FOR)- fi_rlran program .................................. 235
Appendix C. (i)ISA.F'OR)- fortran program .................................. 238
Appendix D. (UTTT.FOR)- fortran program .................................. 243
Appendix E. (ORTII.FOR)- fortran program ................................. 246
Appendix F. (GENE.FOR)- fortran program .................................. 250
Appendix G. (CI1RIS.FOR)- fortran program ................................. 257
Appendix II. hnproved approaches for programming ............................. 261
V


A Physical Model for the Acousto-Ultrasonic Method
Michael T. Kiernan and John C. Duke, Jr.
Virginia Polytechnic Institute and State University
Department of Engineering Mechanics
Blacksburg, Virginia 24061
Introduction
The advancement of tcchnology demands increased implementation and further development of
advanced material systems such as composite materials. Ilowever, a sound engineering approach
requkes utilizing models of material behavior wlfich can be used to predict ensuing behavior and
to avert disatrous failures due to various sources of damage like fatigue. Utilizing models to predict
future behavior for a material usually requires ascertaining information on the state of the material.
For example, fracture mechanics utilizes known material properties and measurement of crack
length and orientation to predict the behavior of a cracked isotropic material such as aluminum.
Tiffs may entail using a nondestructive testing (NDT) method, for instance radiography, to deter-
mine hfformation on the crack. For an isotropic material, such as aluminum, this offers a plausible
method for safe use in critical structures.
Itowever, composite materials fail by much more complicated processes which can not be ade-
quately modeled by tile conventional theory of fracture mechanics. Future implementation of
composite materials for the advancement of technology requires the synergistic development of
NDT methods and models of material failure. Furthermore, it requires the unification of NDT
with models of material failure to develop the ability to predict future material life and behavior
based on NDT results, wlfich is known as nondestructive evaluation (NDE).

Rcsearchers are currently working to develop modcls that predict tile strcnglh of a materia[ and its
degradation due to fatigue. The lbllowing chapter will say more concerning fatigue models. In
general, fatigue models require ,an input parameter or parameters which describe the present state
of the materkd.
A number of NDT methods have been developed to help determine the material state, cach with
various advantages and disadvantages. Reviews and comments on most NI)T methods may be
found in references 21 and 26. Some NDT methods are more easily related to the mechanical state
of the material, while some offer the advantage of being simplcr and quicker to implcmcnt for
practical application.
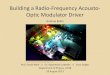
The fundamental aspects of the AU method entail introducing a mechanical excitation at one poh_t
on a matcrial surface and sensing the resulting disturbance at another spot on the malcrial surface.
A general diagam (fig. 1) displays the basicidea of thc method and the versatility of its imple-
mentation.
Much work has been directed at determining the best methods for creating the mechaaical dis-
lurbance and how best to sense it (refs. 34, 87, 152, 155. 159, 160, and 161). Also, work has been
directed at how to best analyze the signal produced by the sensing instrument (rcfs. 7, 49,8, 10, 99,
147, and 63) and some work to understand the physics of the wave propagation (refs. 54 and 97).
l lowevcr, no theory to date fully explains the nature of wave propagation in composite plates as-
sociated with the AU incthod.
The original implementation of the AU method involved using a piezoelectric transducer to simu-
late acoustic emissions and another ultrasonic piezoelectric transducer to monitor the resulting
disturbance at another location. Initial analysis of lhe rcccivcd electrical signal invoh,cd counting
voltage excursions above a llueshold voltage to gain an indication of thc cncrgy in the signal. "lhc
number o[ counts above the thrcshold w)ltage was multit',licd by pulse ratc and lhc sample interval
to yicld a value termed the Stress Wave Factor (SWF). If the electronics and thc orientation of
transducers arc the same for two different scctions of material, it was postulated that the rcgion of

ISOUROEII DETECTOR _ SIGNALANALYSIS
SOURCE DETECTOR
FRACTURE
PIEZOELECTRIC
IM PACT
LASER
EMAT
WHISTLE
PIEZOELECTRIC
LASER INTERFEROMETRY
EMAT
CAPACITOR
Figure I. General diagram of AU method

material with the highest SWF value would be tile strongest. The primary assumption is that a
material that most efficiently transfers energy via stress wave propagation will better transfer service
loading and hence be less prone to fracture. Tiffs was used by Vary and coworkcrs (ref. 36) to
predict strength of small composite beml specimens. Also, this method was used to monitor pro-
gressive fatigue damage in composite specimens, llcnce, early work on the AU method showed
lhat the AU measurement (SWF) correlated to the material condition of the specimen and ensuing
behavior, thus fulfilling one basic demand of an NDT method.
Additionally, the method shows other practical advantages. First, the direction of wave propa-
gation is in the plane of the plate, wlffch is often the plane of primary loading. Thus, the AU
method oftbrs the advantage of characterizing the material in the direction of loading. Secondly,
the AU method offers the practical advantage that access to only one side is necessary.
A number of problems exist with appfication of the AU method and these are in fact defining the
path of research on the AU method. First, the present expcrimcntal techniquc is tedious and rather
difficult to reproduce. Methods of overcoming these problems involve using advances, such as laser
tectmology, for creating disturbances mad measuring disturbances. Secondly, the method has, prior
to this work, had no sound theoretical basis for composite materials, so that connections could be
made to other physical models of materM behavior.
The purpose of tiffs dissertation is to develop an understanding of lhe mechanics of the acousto-
ultrasonic (AU) method and hence to pave the way for rclath_g AU parameters to input parameters
for fatigue models. In otherwords, mechanics is the common ground by wlffch both NIYI" methods
and fatigue models may be understood and eventually related to develop an NDE method. Using
tiffs philosophy, it is the goal of this dissertation to both forward an undcrstanding of the mechanics
of the AU method and to begin merging it with fatigue models.
The second chapter covers the unifying concepts of mechanics of composite materials, ultrasonic
wave propagation theory, and experimental ultrasotffcs to help provide a basis for building an AU

modelfor usewith prcdictivemodels, l.amb wavetheory mid through-thickness-transverse-
resonance (TTTR), both used in later chapters, are covered in this chapter. Also, a more com-
prehensive review of AU research is covered in this chapter, _ith emphasis on theory and rcsults
utilized in tiffs dissertation. ]'Iris chapter also serves to motivate the direction taken in subsequent
chapters.
The third chapter details the experimental set-up and proccdure. This is very important in ozder
to understand the limitations of this work and to bcst implcment these results. Morcovcr, this
chaptcr includcs gencral statements conccrncd with practical applicati(u_ of the AU method. An
understanding of the experimental sct-up combincd with the physical intcrprctation of rcsults may
also lead to improved cxperimental set-ups.
The fourth chapter provides results obtained using tile experimental procedure describcd in the
prior chapter, including both qualitative and quantitative descriptions of the signals used to under-
stand the wave propagation. Thcse results along with results from tile literaturc scarch provide a
basis for a physical understanding of tile AU method. Additionally, results are given which are not
totally undcrstood at prescnt, but will hopefully guide the way to furthcr rescarch and improved
modeling.
The fifth chapter details a physical understanding of tile AU method that has been obtained by
comparing experimental results presented in the fourth chapter to the theory discussed in the second
chapter. This involves using elasticity solutions, Immb wave theory, and through thickness trans-
verse resonance. Qualitative trends are noted and quantitative comparisons are made betwcen ex-
perimental rcsults and computer results from programming TTTP. and Lamb wave equations.
Specifically, results seen in the AU signal ;u'e identified as higher order Lamb waves. Discussion
is also directed toward explahfing the mechanism by which the transducer excites the Lamb waves
seen in AU experiments.

"lhe sixth chapter uses the physical understanding of tile At," method, fonvarded in thc fifth chapter,
to construct a model of the AI.J method. This model includes lhe use of computer codes which
compule through the thickness lransverse resonance frequencies and dispersion information on
guided waves in composite materials. A large body of discussion is directed at how to model the
mechanics between the input and the resulting Lmnb waves. Additional conunents are made on
how the model may be improved and built upon for future use. Tlfis chapter also discusses how
the AU model could be combined with fatigue models to yield NDE information.
The scvcnth and final chapter forwards an overview of the dissertation topic, l)iscussion hcre in-
corporates ideas for future research and practical considmations of applying the AU method.
In general, this dissertation develops a'physical understanding of the AU method flom expcrimental
results, wave propagation theory, and understanding of composite matmials. Additionally, an ap-
proach for inodcling AU results is developed based on the physical understanding of the AU
method. The major contribution of this work is the physical interpretation of experiment:d results
and the application of this toward developing an NDE method.
6

Literature Review
The literature review starts with a basic coverage of composite materials and composite material
damage models. This review is by no means comprehensive, but h_troduces notation and ideas for
understandhlg following cmmnents. Next, basic concepts of wave propagation are presented, in-
cluding the behavior of plane waves in various media and the concept and analysis of a waveguidc.
Speci.fically, the use of Rayleigh/l_tmb wave analysis to predict plate wave behavior and the phe-
nomenon of through-thickness-transverse-resonance (TTqR) are thc focal points of the discussion
on waveguide thcorT. Basic wave propagation and wave guide theory can be used to develop
models of the last two subjects to be covercd hi the literature review, these being analytical ultra-
sonJcs and the AU method. Thc literature revicw of the AU technique will show the rtccd for AU
models in composite materials and hence promote the usefulnesss of the disserlation topic.
Composite Materials
A grcat deal of work and research has been devoted to understanding composite material behavior.
References 43-48,119,123,114,109 give a good general overview of some of the basic results of this

work. One major division in understanding tile mechanics of composite materials is that of
micromechanics and macromechanics. Micromechanics is concerned with understanding the be-
havior and interaction of the constituent materirfls in the composite. Obviously, this is of grcat
importance in truly understanding the mechanics associated wilh composite Inatcrial behavior.
Generally, macromechanics models global mechanical behavior by treating each lamina as an
anisotropic homogeneous matcrM. A couple of pertinent commcnts will be made on both
macromechanics and nficromechalfics. The discussion bdow starts by introducing the notation and
coordinate system which is used throughout the paper. Next, a brief discussion is given on
macromechanics and then micromechtmics. Then, several points are made concerning the field of
damage mechanics, which invoh'es understanding both micromechanics and macromechanics.
Lastly, a brief coverage of the critical element model is given, along with some conunents on fatigue
modeling of composites in general.
Basic Notation and Coordinate System
Figure 2 shows the basic coordinate system which will be used in the rest of the dissertation. Notice
that b is half the plate thickness. Also, notice that the origin is located on the horizontal middle
plane of the plate.
Figure 3 shows the defi|fition of azhnuthal angle which will be used throughout the remainder of
the paper. Also, the relative direction of the fibers in a given lamina with respect to a chosen zero
degree fiber direction will tbllow the same convention (i.e., positive for counter clockwise rotation).
I Ience, a laminate is described by writing ply fiber orientations with rcspect to the zero degree di-
rection betwecn brackets and separatcd by slashes, in the order they occur starting with the top ply
and ending with the bottom ply. Also, a subscript s following a bracketed configuration means the
laminate is composed of a top half of laminae described by what is in the brackets and a bottom
half which is the mirror image. For example, [0, 90], is picturcd in figure 4.
1 --

X3
/
±2b
/7
\t
x disturbance3
Figure 2. Definition of coordinate system
_

The standard notation will be used fin the general 3-d linear elastic stress-strain relations.
Tiffs im, olves using both the compliance matrix and tile stiflhess matrix defined below:
= so.oi
The reduced tensor notation utilizes the following reductions:
11---I, 22---2, 33---3, 23---4, 13---5, 12---6
where % and % arc the stless and strain tcnsors, respectively. The rotation of stress and strain
tcnsors to new coordinate systems is pelformcd using conccpts of tcnsor analysis, llowcver, at-
tention should be given to which dctiuition of shear stra.in is uscd and correcting factors should be
included. These concepts can be used to dcrivc the cquation for the rotation of thc stiffness matrix,
given in unrcduccd tensor notation:
cvkt= ai,,,ai,m,o%Cm,,op
The a,,, type terms are tile direction cosines between tile coordinate axes. llence, _k_ shows how
reorienting an anisotropic material, such as a fiber reinforced lamina, modifies the moduli relative
to a given direction. Note that in tile unrcduced notation tile subscripts only take values up to 3
and that certain mixed tt:ttalS are half the value of the same term in the reduced notation (ref. 105).
'l'hus, the value lbr the moduli of a fiber rcinR)rced ply with fibers oriented in any direction can be
easily obtained by transforming the stiffness matrix values for a coordinate system with one coor-
dinate axis in tim fiber direction and another perpendicular to the plane, The coordinate system
aligned with the fiber and transverse fiber direction contorts less terms in the stiffness matrix due
to inherent symmetries. This tr_msformalion will prove hnportant for the equations describing how
wave propagation varies relative to tiber direction for composite materials. These transR)rmed
values for various layers can be averaged together in a laminate analysis scheme. A good coverage
of the relationships between engineering prope;lies and terms in the stiffness and compliance ma-
10

Definition of Azimuthal Angle
8 = 90 °
J
/
8- 60 °
\
/B • 45 °
Jj I I I _" F'lberO°Dlrectlon
I\ /
SendingTransducer __'__
Receiving Transducer
/ \8 = 30 ° I
8= 0 °
/
\
/
f
Figure 3. Definit_on of azimuthal angle
11

Figure 4. Laminate notation- [0, 90"]s
12

trices can be found in Jones' book (rcf. 123). Also, the matrix Q,j is used to represent the reduced
plane stress matrix (rcf. 123). l:inally, the following notation is utilized for engineering properties:
Poisson's ratio
vU= - _jl_i
for
Gi= cr
and coefficients of mutual influence
_li,ij= ri/Yil
for
TU=T
and
rhJ,i = _'U/q
for
cr/j = o"
The other engineering constaIlts are fairly serf-explanatory and standard (see ref. 123).
A, B and D matrices are calculated by the following equations
/./
k=l
13

ll
= -z__ 0
k=l
3
D U= 1/32..a(Qij)k(z_ - zk_ 0
k=l
where n is the number of plies and Q,j are the values of the reduced stiffness matrix. These matrices
can then be used to calculate displacements and curvatures due to in-plane loads and moments.
This is an example of averaging layers to get laminate response. For unsyrmnetric laminates the
B matrix is nonzero and in-plane loading can result in curvature.
Macromechanics
A good basic coverage of macromechanics can be found in references 123 and 124. Macrome-
chanics uses ply level properties, assuming homogeneity, to determine larnhlate behavior. ]'his in-
cludes analytically predicting how the laminate will deform under loading and predicting ply level
failure. Laminate analysis can be used to predict deformations and ply level stresses by calculating
the A, B, and D matrices. This type of analysis, encompasses assumming plane stress or that the
material is sufficiently thin to ignore out of plane effects. A good coverage of laminate analysis can
be found in reference 124. Failure theories can use the information on stresses and strains in various
lamina to predict ply-level failures. Theories include the Maximum stress and Tensor Polynomial
criteria. These theories and others can be found in Jones' book (ref. 123).
A variety of interesting phenomena occur due to the variation of material properties with azimuthal
anne, caused by the fibers. First, even for a single ply this causes a coupling between shcar and
tension for directions other than in the fiber direction or transverse to the fiber. This type of be-
:- 14

havior is quantified by the coefficient of mutual influence defined above. For instance, v/ij,_indicates
the amount of shear deformation which will result due to a tensile or compressive force. These type
of basic mechanical properties should be kept in mind when trying to understand wave propagation
phenomena in composite materials.
Differences in the mechanical behavior of various pries leads to interlaminar stresses at edge
boundaries and can lead to delamination between pries. Ilerakovich has reported on the relations
between engineering properties of neighboring plies and the propensity for delamination (ref. 119).
In general, Macromechanics considers the effects of fiber and matrix interaction to be smeared to-
gcther, so that a ply may be treated as a homogeneous anisotropic material. Laminate analysis and
plate theory can then be used to predict how the laminate will deform under load. This information
can thcn be used in failure theories to predict when various plies will fail. Also, laminate analysis
can be uscd to gain hfformation on when a laminate may delmninate. Lastly, approximations for
ply level effects of damage can be used with laminate analysis to show the effects of damage on the
mechanical behavior of a composite material, as predicted by a macromechanical approach. For
instance, laminates with cracked pries can be analyzed with the value of the modulus for the cracked
plies lowered or reduced to zero. Determining exactly how damage, such as cracks, changes the
moduli of composite materials is the domain of micromechanics.
Micromeehanics
The area of micromechanics concerns trying to determine how stress mad strain interaction will take
place between the fiber and matrix materials. Also, micromechanics is concerned with the effects
of damage on the distribution of stress and strain in specific areas such as in the fiber and matrix.
This can then be used to predict failure or changes in stiffness. Furthermore, this type of approach
is essential for understanding damage mechanics and the progression of damage leading to failure
15

in compositematerials.Analysisof tiffstypeisusedin failuremodelssuchastheCriticalElemei_t
(ref.43). Althoughpresentresearchon theAU methodis notoverlyconcernedwitha microme-
chanicstypeof approach,variousobservedphenomenamayultimatelybeexplainedby usinga
micromechanicsapproach.Thismayespeci',dlybetruewhentDingtoexplaintheeffectsofdamage
on stiffnessanddamping.For instance,Nuismer'sapproach(ref. 111)maybeusedto predict
stiffness reduction in a cracked ply. Tiffs effect may then be used with laminate analysis to predict
reduction in stiffness. Tiffs may then be used with wave theoD' to predict changes in AU. Basically,
micromechanical analysis involves defining a representative w)lume and setting up a boundary value
problem based on this volume. Ttfis may include considering internal boundaries between fiber and
matrix within the representative volume. Then mechanical properties of separate materials are used
with governing equations to determine overall volume behavior.
Damage Mechanics
References 109, 111, and 114 survey the area of damage mechanics and document a variety of ob-
servations. In genend, these observations concern damage due to fatigue, but references 70, 100,
116 and 117 concern damage incurred due to impact.
The first mode of damage encountered during unidirectional cyclic tensile loading is matrix cracking
in plies with fibers oriented away from the loading direction. These cracks usually run between fi-
bers in a direction parrallcl to the fibers. Cracks usually appear first in plies with fibers oriented
furtherest from the loading direction (i.e., in many cases 90 degrees). Also, the spacing of cracks
can be predicted based on a shear lag model (rcf. 109). The cracks reduce the stiffness of the lam-
inate. Various models e:dst for predicting tiffs reduced stiffness, some involving continuum based
solutions.
16

Next,highstress regions associated with cracks near the ply interface cause fibers to break in
neighboring plies. It has been reported that two-thirds of the total number of fiber breaks occur
in the first one-third of the fatigue life (ref. 109).
Also, microcracks begin to form at prhnary crack tips located at ply interfaces. A large number of
these cracks usually exist and they do not extend far from the primary cracks. Plunkett (ref. 125)
has reported that these small microcracks cause an increase in the damping of the material, ttence,
the microcracks may cause energy to be dissipated in these regions, leading to increased localiz.ation
of damage in these areas. The damping effects of these microcracks may explain the fact that AU
values decreased more at this stage than stiffness values. Many other factors, such as load rate (rcf.
148), stress concentrators, and tension versus compression affect fatigue behavior and modes of
failure. Understanding these effects is still a goal of research, llopefully, an increased under-
standing of the mechanics controlling these effects can be combined with an increased understand-
ing of the AU method. For instance, maybe damping of AU waves may be extrapolated
analytically to predict what is going on mechanically at various loadhlg rates and then related to
damage modes.
lrinally, areas of localized damage may grow, leading to delamination and local failure. The growth
of delaminations has been treated analytically by O'Brien (ref. 114). Also, the mechanical effects
of the delamination and matrix cracks may be calculated using micromechanics and put into
macromechanics models to predict laminate properties for damaged materials (ref. 111). As men-
tioned, damage, such as matrix cracking, causes changes the example in material properties, for in-
stance material stiffness, ttence, the material will behave differently on a global sense and also tend
to distribute stress differently as a result of damage. The fmal effect of the damaged region may be
to concentrate stress in plies with fibers in the direction of loading. •This concentrated stress,
whether caused by fatigue or applied stress, may, if large enough, eventually lead to laminate failure.
Predicting the growth of this region and eventual composite failure is the goal of modelhag efforts
such as the critical element model. NDT methods attempt to assess the state of the damage process.
A full NDE method for composite materials involves using damage models with the NDT methods
17

to predict the se_'ice life and future behavior of a composite material. This involves undclstandiug
tile process by which matcl"ial any regard prol,ellies change due to dalnage and how l/2ese changes
proliferate and cause more diunago, l Icnce, an increased understanding of damage mechanics
provides information K)r constructing fatigue models, understanding NI)T results, and hopefully for
relating fatigue models to NI)T methods.
Models
A number of approaches have bcen used to model the fatigue of composite materials. Most of
these approaches are phenornenological. One early model consisted of a linear C(luation k)t residual
strength as a function of fatigue cycles (ref. 44). More recent approacties ate being developed which
are more mechanistic and c,'m be applied to variable blocks of loading (ref. 43 and 108).
t:irst, Poursartip and Beaumont (roe 108) have developcd a simple model which involves integrat-
ing a diffcrential equation for damage to give fatigue life. For example stiffness can be used as a
damage parameter, since it decreases wilh damage. As poinlcd out in the reference, this parameter
may be replaced by any other reptvscntative indicator of damage. In example, the AU value oh-
lathed ill the direction _)f loading would perhaps serve as a good indicator of damage. In fact, the
study comparing the SWI-: value to fatigue cycles showed the AU measurement to change more
than stiffness (ref. 6). "Ibis may be due to the fact that the AU measurement is sensitive to both
stiffness reduction and various sources of wave motion attenuation. This method only deals slightly
with the mechanics of the matter, but has the advantage of simplicity, llowever, as with any cur-
rent method some experimental data is necessary.
A more mechanistically based approach is the critical element model proposed by Reifsnider and
coworkers (ref. 43). 'l he major aspect of this method is that a critical element wtlich controls lhe
strength of the laminate is defined. In many applications this is the laminae with fibers in the di-
18

rectionof load. llcnce,tileplmnomcnologicalcharacterizationof thecyclicstrength &:gradation
of the critical element is essential for application of this model. This method accounls for various
mechanical effects of damage _hich occur. This involves the redistribution of stress due to malrix
cracks. Additionally, this approach accounts for the 3-dimensionality of the stress state and slrength
by introducing a failure theoz y type term (F'(n)) for the applied stress over ultimate strcngth term
in the residual strength equation. In any regard, this method uses information on the mechanics
of the damage process to allow the prediction of fatigue for a given laminate based on knov, ledge
of a single ply.
The purpose of pursuing these models is to help relate the mechanics of these models to the me-
chanics of the AU model. Presently, these models trace fatigue stale by changes in stiffness, which
most certainly affects AU results. Also, the directional dependence of thc effect of damage shows
up in the results of the AU method and is also of inlercst in applying the crilical element. Addi-
tionally, the stress waves may hlteract with damage through scattering and damping mechanisms
and be sensitive to more subtle mechanical effccts of d,'unage which are not evident in stiffness
measurements. Ilowever, the relationship between these effects and fatiDle behavior is probably
beyond the present mechanical understandh_g of fatigue. As slated, the purpose of an NDI:, method
is to help predict the mechamcal behavior and life of an engineering component. The best way to
do this is to find pertinent parameters to use in damage models, llence, this coverage of damage
models serves to show how the mechamcs of the damage models and the proposed AU model are
related, in hopes of finding how AU parameters may be combined with damage models to deter-
mine the engineering response and remaining life of a structure.
19

Wave Propagation
Wave propagation is concerned with how time mad position dependent displacements change
tt_roughout a material. The conventional theory of wave propagation can be broken into the two
basic categories of bounded and unbounded media. Ilowever, the theory of wave propagation in
bounded media involves using much of the theory from wave propagation in unbounded media.
In this section, a shod review of the basics of unboundcd wave propagtion is given and then a
somewhat more comprchcnsive coverage of the Rayleigh/1.amb wave problcm and TTTR is pre-
sented.
Unbounded Media
The equations for wave propagation in an unbounded continuous media arc derived by applying
Ne_,'ton's second law to a rectangular parallelcpiped (Ref. 24). This leads to the following
continuum equation for motion:
l,i_i = aUj
where %j is the gxadicnt of the stress tensor, p is the density of the material, and/_ is the particle
acceleration.
Linear Elastic tIomogeneous Isostropic (LEHI) Materials
For a I.EItI material this equation shows two types of bulk plane wavcs, dilatational (P-wave) and
distortional (S-waves), which can be propagated througll the material. The (P-wave) has displace-
ments hi the direction of propagation and the (S-wavc) has displacements perpendicular to the di-
20

rectionof wavepropagation.In general,this leads to 3 modes of wave propagation in a given
direction, if the full 3-d cigenvalue problem is solved: one (I'-wave) with displacements in the di-
rection of propagation and two (S-waves) with displacements that are mutuaUy perpendicular to the
direction of wave propagation. The following phase velocities are easily derived for each of the
modes of wave propagation:
(P- wave) vp = (E/p) 5
(S- wave) vs = (G/p) 5
where E and G are the tensile and shear modulus, respectively. These velocities arc derived by as-
suming a harmonic plane wave is propagating through the material.
A description of the reflection and refraction of these waves at an interface is relatively straigt,tfor-
ward and is covered in references 3 and 24. A simple case of tiffs situation is that of a plane wave
striking the surface of an infinite half space. The basic solution to these problems can be visualized
by using "slowness surfaces" to view the reflection problem. This approach can be derived by using
SneU's law (which says that the ratio of the sine of the angle of incidence oVer the velocity of the
wave must be equal to the ratio of the sine of the aa@e of reflection over the velocity of the reflected
wave) and by considering stress free boundary conditions.
The solution of the infinite half space problem shows that a reflected P-wave and a reflected S-wave
are caused by an incident P-wave, where the S-wave is at a lesser ,'ingle to the vertical. An incident
S-wave (where the shear motion is in the plane of motion) causes a reflected P-wave and S-wave,
if the angle of incidence is less than the c_itical angle. The critical angle may be calculated by Shell's
law. When the angle of h_eidence is geater than the critical angle, a Rayleigh surface wave and an
S-wave are created. A Rayleigh wave travels parallel to a surface, causing an oval motion of par-
ticlcs. The disturbance decays in amplitude with distance from the top surface and no energy is
transmitted fiom the surface into the half space of material below. Reference 142 considers the
problem at the critical angle. Equilibrimn conditions can then be used to determine relative values
21

of reflectedwaves,l:igurc 5 shows the dependence of reflected wave amplitude over incident wave
anaplilude (A0) on angle of incidence, for the reflected shear wave (,12) ,'rod the reflected l'-wave (
Al). This type of behavior is related to mode coupling, which will be discussed later in regard to
its effect on AU results.
Dispersion
For various reasons, tile wave number k may depend on tile frequency w in a nonlinear manner.
Ilence, the phase velocity v = o:/k depends on frequency. This leads to a number of interesting
phenomena. Plots of wave number versus frequency (dispersion curves) prcscnt this information
in graphical form. If a curve is nondispcrsive, tile curve is a straight line, where the slope of the line
is the phase velocity. If the curve is nonlinear (dispersive), the phase velocity is the slope of a line
fiom the origin to the point on the curve.
First, the separate harmonic components tend to separate in the wave train, l lence, various har-
monic components tend to separate out, especially in cases where the component frequencies pos-
sess different phase velocities and group velocities.
_Ilae conccpts of beat frequency and group velocity also help to explain dispersive wave motion.
These concepts relate to each other and help to explain phenomena seen in the AU tcch_fique.
The concept of beat frcquency is oflcn utili.zed in vibration and wave motion analysis to detemline
the effect of two frequencies scparated by a small frequency difference. Basically, the two harmonic
wave components with wave number k t and k2 and frequency w_ and _o2, respectively, may be
superimposed and trignometrically manipulated to produce the following equation:
k2 + k t c% + w I k2- kl m2- wlu = 2a cos( 2 x 2 t) cos( -----_-- x - 2 t)
22

1.2
1.0
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1.0
//
//
//
//
//
//
//'l,lLJtl
0 20 40 60 80
ep
Figure 5. Reflected wave amplitudes for incident P-wave [ref. 147]
23

The first term represents the average of the motion characteristics of the two separate components
and is close to the ori_nal motion, if the two values are comparable. The second term propagates
more slowly and is a modulation or beat term.
Group velocity is used to describe the cnerg3' speed - the speed at which the modulating pulse
travels. 'Ibis describes the speed at wttich the pulse travels and can also be shown to bc the speed
of energy propagation. For the ease of two frequencies this value is simply given by
_r. = (_'2 -°'l)/(k2 - kl)
I lowcver, if a number of frequencies are present the group velocity or pulse velocity is given by the
equation
d(o
vv'- dk
Graphically, the group velocity for a certain wave motion is the instantaneous slope of the
dispersion curve.
These concepts have been united into a concept for analyzing a wave packet by utilizing a Gaussian
exponentM function (rcf. 139). This theory gives the same values for phase and group velocities
and predicts the extent of pulse spread. Adaptation of this type of theory may help to improve
modelling of the AU method.
Dispersion is caused by a number of sources in materials. Authors have cited a number of these
for composites:
Layering (ref. 32, 51, 69, and 106)
Different phases-fiber/matrix (ref. 51, 69, and 107)
Wave guide effects (ref. 12 and 13)
24

Inclusionsanddamage(ref.66,69,and81)
Ilence,a gooddealof bothexperimentalandtheoretical work has been conducted to understand
wave dispersion in composite materials.
Corrunents will be made later on how tile dispersion caused by a wave guide may produce some
of the above mentioned phenonlena. This may help to shed light on signatures occurring with the
AU technique.
Diffi'action and Interference Effects
The fact that any real wave is generated from a source of finite size, that does not generate a plane
wave with perfect phase, spawned the need for less idealized treatments of wave propagation. Much
of the theory associated with these ideas is borrowed from optical theory, where obscrvation of
these effects are most obvious (e.g., Young's silt experiment). Basically, tlfis theory is concerncd
with the manner in which waves of different phase interact with each other, in either a constructive
or destructive mariner. In the case of a fmite source problem, this can be broken-up into two re-
girnes- Fraunhafer and Fresnel.
Fraurthafcr- region far away from the source, where plane waves considered to start at each
separate point on the source have recombined to form a diffraction arc of constant phase (i.e.,
a plane type wave)
Frcsnel- region close to the source requires a I Iuygens wavelet approach
Reference 139 presents a good overview of this theory as applied to slits with plane light incident.
An area of interesting work may be to develop tlfis type of work as it applies to the AU method.
]lowever, the situation is very complicated, because the effects of the reflected waves off the top
25

and bottom plate boundaries leads to a complicated system of diflk'rcnt path lengths and hence
phase diffc,cnces.
Liaear Elastic llomogetwous Anisotropic ( L EllA) Materials
For anisotropic materials, the eigenvalue problem becomes somewhat nlorc complicated and in
general 3 separate Ftlodes of wave p_op:_gation exist. Also, the properlies of these modes arc de-
pendem on the direction ii1 which the waves are traveling
Siartitag with tiic basic constitutive law for ,'m alflSOtropic material and assuming infinilcsimal strain,
the equation of motion can be expressed as
where C,),_ is the stiffness matrix, u_,,kis the gradient of the strain tensor, _ is the acceleration and
p is tile matcrizd density. An assumed plane wave solution can be expressed as
uk = A kei(,,,,,.,c,,,-_,t)
where t is tbne, uk is the displ_cement vector, v,, is tile wave vector, x,_ is the position vector, and
co is the angular frequency. The phase velocity can be dcl-med as
where
1= + +
Hence, these equations can be combined to arrive at lhe basic eigenvalue problem for a wave
propagating in an infinite anisotropic linear material
26

Ak().i k - nv26_k) = 0
where
&k= Giklvjvl
A k = Aa k
and
_kak = 1
The determinant of the three by three matrix in the parentheses can be solved to obtain three values
of phase velocity for an assigned dhcction _/I _ I. For each phase velocity the displaccmcnt am-
plitudes can be determincd to within an arbitrary constant. A program has been written to solve
this equation for any direction in a composite plate and i.s listed in appendix G. These results help
to understand the nature of wave propagation in composite materials and to derive dispersion
curves for plate waves in composite materials. Also, a form of this equation is used later to deter-
mine phase velocities ha the thickness direction, and in turn to predict the TTTR frequencies.
For anisotropic materials, such as composites, the variation of mechanical properties with
azimuthal angle causes coupling between shear stresses and normal displacements and between
normal stresses and shear displacements (ie. coefficients of mutual influence). For example, a wave
launched in a general direction, with predominately normal displacement, will excite shear forces,
thus force and displacement vectors are not aligned, leading to the energy flux deviation. Specif-
icaUy, the energy flux deviation is the redirection of the energy in a stress wave from the direction
it is launched. In the exarnple the energy vector is obtained through the matrix multiplication of
the stress matrix and velocity vector. For cases where there is coupling between shear and normal
motions, the shear stress, caused by the hnposed predorninately normal (motion found by solving
the Ctwistoffel equation) motion, matrix multiplies the velocity vector (oriented in the direction of
27

propagation) and the shear stress acts to redirect the energy flux. For certain directions in
anisotropic materials and for all directions in isotropic matcrials, there is no coupling between shear
and normal motions/stresses (e.g. coefficients of mutual influence are zero). In these cases, the
energy flux is in the direction of the motion, because no stresses arise that are not oriented with
displacements. Itence, the unit vector normal to the plane of constant phase is not always aligned
with the flow of energy. In particular, the energy flux vector can be expressed mathematicaUy as:
where the dot over the _ denotes a time derivative.
The problem of a wave impinging on a stress free interface is greatly complicated by a number of
effects associated with energy flux and the fact that 3 separate pseudo-waves (motions are not purely
normal or shear) make up the wave motion. A number of authors have pursued this problem (refs.
22).
The first complication is that the critical angle (angle above which an incident shear wave can not
excite a reflected normal wave) is dependent on the energy flux vector and not on the slowness
surface (ref. 40).
The next complication is the existence of 3 non-circular slowness surfaces. This can lead to a va-
riety of complications. For instance, for a stress free boundary this means any incident wave will
cause 3 reflected waves with displacement vectors oriented with various components in and out of
the plane associated with the wave vector. Additionally, as pointed out by tlenneke (ref. 22), a
wave impinging on the interface between two separate anisotropic materials may result in more than
3 waves being refracted, depending on the angular variation of material properties.
These types of problems create great difficulties in applying various wave tracing tectmiques and
other similar approaches to understanding the AU method.
28

Other Constitutive Relations
Although the model which is forwarded in this work does not include the effects of other more
complex constitutive relations, these effects are mentioned for the purposes of explaining effects
seen experimentally and to promote further work.
First, any real material has mechanisms for dissipating encrgy or attenuating wave propagation.
These include scattering, absorption, reflcctions, viscoelastic effects, and various other dissipative
effects. As mentioned in Kolsky (ref. 24), understanding mechanisms for dissipating stress wave
energy may lead to increased understanding of damage mechanisms occurring in materials. Devel-
opments in understanding tiffs type of behavior also leads to more sophisticated ultrasonic methods.
Christensen (ref. 126) gives a good trcatment of stress wave propagation in a viscoelastic medium,
with some notes on how tiffs may be used to detemaine viscoelastic constitutive values. Kolsky (ref.
24) gives a good overview of sources of internal friction, their models and associated experimental
work. Also, a number of authors have modelled scattering due to inhomogeneities that occur in
composites and result due to inaperfcctions (refs. 93, 94, 115, 81, and 66). Combining modcls that
account for materi,'d hfllomogeneities with AU models will allow for more detailed information to
be obtained from the AU method.
Plastic and shock waves can occur in instances where high amplitude excitations (such as explosive
typc charges occur). Plastic waves occur much more often than shock waves in sofid matcri:ds.
I lowever, reference 104 gives the theoretical formulation of shock wave propagation in composite
materials.
Plastic waves occur when the amplitude of a stress excitation is above the proportional limit. The
mathematical formulation for plastic waves can be found in reference 24. The wave speed of a
plastic wave is less than that of an elastic wave, but the amplitude would be greater, tlence high
impact excitations would produce a small amplitude elastic wave which would preceed a high am-
29

plitudeplasticwave.Oneareaof researchmightinvolverelatingelasticwavepropagationto plastic
wavepropagation,sothatelasticwavepropagationmightbeusedto predictplasticwavepropa-
gationanddamage.
Thepropagationof stresswavesin inhomogeneous matter is of both practical and theoretical in-
terest. In general, the propagation of stress waves in inhomogeneous material can lead to scatter
(ref. 69), dispersion (rcf. 51), and various waveguide effects such as Love and Stonely waves. Many
of these phenomena depend on the relative dimensions of the inhomogencity compared to the
wavelength of the stress wave. This is an active area of both experimental and theoretical research.
Plate Wave Equations
Two basic approaches can be used to derive the equations for plate waves. The first is the more
conventional Rayleigh/l_arnb wave analysis. The other more recent approach is the method of
partial waves or transverse resonance (ref. 127).
The Rayleigh/Lamb wave approach involves expressing the displacement vector u, as a scalar and
vector potential and then solving for the potentials in the equations of motion by the scparation
of variables method. Next, the potentials are combined in a proper manner to satisfy the boundary
conditions (stress free) at the top and bottom surfaces of the plate.
In the partial wave method, exponential-type waves are reflected back and forth between tile top
and bottom stirfaces of the plate. This leads to traveling waves in the direction of wave propagation
and standing waves in the thickness direction of the plate. These waves are found by establishingv
the condition for transverse resonance through the thickness of the plate. For anisotropic materials,
the method of partial waves leads to a solution much easier than the more classical approach. Also,
as pointed out by Solie and Auld (ref. 127), this method highlights certain physical features of the
nature of plate wave propagation.
30

Isotropic Plate Waves
As is-the case with many areas in science, the origin of the plate problem was experimental obser-
vation. Specifically, the nodal patterns for a vibrating plate were noted in 1787. In 1815, Germain
derived tile equations for an isotropic plate vibrating with a bending motion. Additional contrib-
utions wcre made to this problem by a number of famous scholars, including: Lagrange, Legendre,
Fourier, Poisson, Cauchy, and Euler (ref. 11). Lagrange's work expanded on that of Germain,
leading to the Gcnnain-Lagrange equation. This equation assumes a thin plate vibrating in a
flexural motion to arrive at the equation
2 2 ,_ _02u3DVtVlu 3 + _ = 0
-./90 63t2
where,
and
D = 4/_b3/3(1 - v)
and b, #, v and p are half the plate thickness, Lame's shear modulus, Poisson's ratio and the mass
density, respectively. In 1850, Kirchoff published a paper in which he employed a variational
metlmd to derive the plate bending vibration equations, including a derivation of the proper
boundary conditions and a comparison to original experimental results. It is this basic approach
that Mindlin later utilized to obtain his higher order approximation method.
Although enjoying much less attention, it was at about this same time that Poisson derived the
equations governing the motion for extensional waves in a thin plate. These equations are known
simply as the Poisson extensional equations
31

Oul Ou2 2 02ul
(_ + ") -b_-_(°---_t+ -b-_-_2)+_'v_ =p o?
0 Out &_ _V_u 2 02u2
where,
where ,t is Lame's constant. The Germain-Lagrange equation and Poissons" extensional equations
are only valid if the wavelength of the vibration is greater than the plate thickness and tile waves
are low frequency. Moreover, tile solutions assume that there is no variation of displacement ill the
x3 direction or what is the thickness coordinate.
In 1888, Rayleigh utilized the theory of linear elasticity to derive tile equations for the general plate
problem in an isotropic material, using the equation of motion stated above.
The equation of motion can be decoupled, revealing two independent modes of wave propagation
by using the Poisson-Lame decomposition formula. Thus, a purely extensional wave (P-wave)
with velocity given as
is found to propagate with irrotational motion.
propagate with vclocity
Addition_dly, shear waves (S-waves) are fi)und to
as equivoluminal waves. 2 and t_ are Lame's constants.
32

llence, combining these basic equations derived from elasticity with the imposition of traction free
boundaries at the top and bottom surfaces
r3i = 0
at
x 3 = __+b
Rayleigh set the stage for solving the problem for plates of arbitrary thickness. The solution to this
problem, much of which was performed by Lamb (ref. 58), lead to a number of interesting results,
including the prediction of an infinite number of higher order modes. Moreover, he showed that
the fundamental mode solution converged to the elementary theory as the plate thickncss was re-
duced to zero thickness and to Rayleigh surface waves in a half space as the wavelength converges
to zero. Note, the boundary conditions are automatically satisfied in the elementary theory.
By introducing two horizontally polarized shear waves (Sit-waves) along the x_ which are reflected
off the top and bottom surfaces, a plate wave is set-up to have displacement only in the x_ direction.
SpeciticaIly, this involves introducing the waves defined by
u2 = El exp i(_x I + fix 3 - cot) + E2 exp i(_x I - fix 3 - wt)
where
_o= v_(_2 + #2).5
where u_ and z_ are equ_ to zero. Moreovcr. the angles of incidence and" reflection are given by the
equation
33

Notice, tile angle of the input wave defines the ratio of the wave numbers. Now, the basic foma
of the solution can be found to be a harmonic wave travcling in the xt direction, with x2 displace-
ment which varies sinusoida[ly through the thickness, where the frequency of the wave is given by
=v, ¢ + )
I Ience, the solution is dispersive (nonlinear relationship bctwecn frequency and wave numbcr in the
propagation direction) for all orders higher than the zero mode. The wavelenglh of each of these
solutions is given by 2rr/{ and the phase velocity by v = w/{. The lowest frequency is given by
<a= v/rl2b, which is considerably lower than the corresponding lowest frequency for flexural vi-
brations. BasicaBy, the input horizonta//y polarized shear waves (S/I-wavcs) can be shown to dic-
tate the plate waves. It should also be noticed that an earlier elementary solution did not exist for
the Stt waves,
Next, lamb continued using Raylcigh's basic solution to derive the basic Raylcigh-t_nb waves,
which are produced by the introduction of a pressure wave (P-wave) and a vertically polarized shear
wave (SV-wave) to the plate. These can be expressed by the scalar potential for the pressure wave
and the one vector potential for the SV-wave. Specifically, if consideration is given only to the
propagation in the xt direction, then
q>= <P0exp i(_x 1 +_ax 3 "--a_t)
2 2co=vp(
It 2 = II 0 exp i(_x z + ax 3 - wt)
where _ois the scalar potential for the I'-wave mad 112is the vector potential for the SV-wave. The
wave normal for the P-wave can be found to make an angle 0_ = + tan-_(_/_) with the vertical axis
and the SV-wave can be found to make an angle 03 = + tan_(_/fl) with the vertical a,,ds. By
34

combiningfourof theSV-waveswithfourof theP-waves,eachwithproperanaplitudeandphase,
tile motioncanbeshownto beharmonicin the x_ direction; the amplitudes vary sinusoidally
through the tKickness, tile phase velocity is vp = co/_ and the wavelength is 2rr/_. For a plate fi'ee
of traction forces on the top and bottom surfaces, this can be described as motions which are
symmetric and antisymmctric about the mid-plane of the plate, l lence combiifing the symmetry
arguments with the traction free boundaries, equations for both tile sylmnetric trod antisymmetrlc
motions can be found. Tiffs includes the displacements u, and u3, the corresponding stresses which
must exist, and the transcendental equations wifich describe the dispersion relations between the
wave numbers. For the syrmnctric mode,
u I = i(B_ cos ax 3 + Cfl cos fix3) exp i(_x I - wt)
u3 = ( -Ba sin ax 3 + C_ sin fix3) exp i(_x I - wt)
Fl = (_2 _/_2)2 cos ab sin fib + 4afl_ 2 sin _b cos fib = 0
where the stress components can easily be calculated using the constitutive relations (rcf. 11). For
the antisymmetric mode,
uI = i(A_ sin ax 3 - D[_ sin fix3) exp i(_x I - mr)
u3 = (da cos ax 3 + D_ cos/_x3) exp i(_x I - wt)
/72 = (_2 _/_2)2 sin c_bcos/_b + 4a/_ 2 cos ab sin/_b = 0
where the stress components can easily be calculated ushag the constitutive relations (rcf. 11). The
variables A, B, C and D are defined by
q_= (A sin _x3 + B cos _x3) exp i(_x I - cot)
and
1t2 = i(C sin fix 3 + D cos fix3) exp i(_x 1 - wt)
35

Also,theslownesssurfaceanalysisproducestheresults
vp
and
2
#2 + _2 _ co
So, the slowness surface analysis for both the SV-wave and P-wave can be added to the F_equations
(stress free boundary conditions) to obtain 3 equations which can be used to relate the variables
a, fl, { and o). Thus, if one knows the mode of a Rayleigh-Larnb wave and either one of the wave
numbers or the resonant frequency, then they can find the remaining variables, as well as the dis-
placements and the stresses (up to a constant) as a function of time and space. Alternately, if any
combination of two of the wave numbers and resonant frequency are known the the mode of
propagation and the displacements can be determined up to a constant. For instance, the re-
lationships between physical variables has been utilized in NDE to derive a basic equation relating
the angle of incidence for the input wave in water to the ratio of the velocity of the input wave ha
the water to the phase velocity of the Lmnb wave (ref. 21). This basic information can be presented
in graphical form as a standard dispersion curve (see figure 6). A quick view of the dispersion curve
provides basic infomlation on the characteristics of the wave propagation. First, the higher the
wave number the higher the angle is between the vertical (xa) axis of the plate and the direction of
the input wave vector, tlence, a general indication of the frequenies present for a general range of
input angles for a given mode may be ascertained. The instantaneous slope of the curves gives the
group velocity and thc slope of an hnagined line from the origin to the point for a particular mode
of wave propagation gives the phase vclocity.
It is interesting to note that the form of this solution for real values of _ can be grouped into thrce
sets depending on the relation between _o[_ with the velocities of the vertically polarized shear wave
(SV-wave) and P-wave. If _o/_ is less than v, then a and/_ are both imaginary. If m/¢ is greater than
36

E
4
3
2 .... antisymmetric
symmetric
0E I -if-- I ;
1 2 3 4 5
2b_
Figure 6. Dispersion curve for infinite isotropic plate [ref. 111
37

v, but less than v_, then a is imaginary and p is real. Finally, if co/¢ is greater than vp then both tile
wavenumbers become real. These three situations can be seen ill the dispersion curve, below line
OE where both _ and fl are hnaginary, between line OE and OL where a is ima_nary and fl is real,
and above line OL where both wave numbers are real (ref. 11). The values of the wave/lumbers
dictate both the spatial variation of wave motion and tile relative magnitude of various displace-
inents.
If one looks at the limits of the dispersion curve a variety of interesting points can be made. In the
region where I_/_ is less than 1 both c_mad/1 are ilnaginary, and _ goes to zero the solution for the
antisytmnctric modes converges to
t2 = {2,r(113(1 - l/k2)) '5
where
(D$
rrvs
k-v,
and b is half the plate thickness. The symmetric mode does not have any solution for this limit in
this section of the dispersion curve. This resonant mode corresponds to that of the zero order thin
plate mode for flexural vibrations as predicted by elementary theory.
In region two, where a is imaghlary mad ,8 is real, the symmetric mode is given as
38

_ = _2(I - l/k2) 5
when _ becomes vanislffng small. The phase speed of this mode shows up to be between that of
the SV-wave and the P-wave. qhis is the same solution derived by the elementary theory h)r high
wavelength extensional waves. Now, as _ increases the solution approaches the line OIL qhe
symmctric branch crosses the line OE at p = 0 with tile solution going to
tq = _ = 2han(l- l/k2) 1/2
ta.tth _b - ab
4(1- Ilk 2)
Tiffs is related to tile Goodier-Bishop wave, the waves produced at critical angles or grazing anglcs,
namely either when the SV-wave is exactly at the angle where it can no longer produce reflected P
waves or if a P-wave is incident at exactly zero degrees (ref. 142). Basically, these equations were
derived by taking the reflection equations and writing the tangent term as a power series of expo-
nential terms and dropping all higher terms.
As _ gets large, the fundamental symmetric and antisymmetric dispersion curves both approach the
line OR. Tiffs is in the region where both _ and fl are imaginary. The basic dispersion relation
reduces to
4a_2 _ (_2 + _2)2 = 0
the phase speed of tiffs wave is less than vs. Since, both wavenumbers are imaginary, both dis-
placement components vary hyperbolically across the ttffckness with maximum amplitude at the
top and bottom surfaces. Actually, the solution reduces to that of a Rayleigll wave in a half space.
39

Ilcnce,tile syrmnetric mode goes through a transition from an extensional wave to a Goodier-
Bishop wave to a Ra_ leigh wave. This shows that the nature of the wavenumber for the input wave
governs tile nature of tile plate wave.
The l.ame modes are found to exist if _ = ft. This causes the symmetric wave equation to become
cos/_b = 0
and the antisymmctric wave equation becomes
sin/Tb = 0
Tiffs causes r, and r_._to disappear at the top and bottom surfaces. This in fact corresponds to
an equivoluminal wave, which is causcd by the interference of pure SV-waves which are reflected
and incident at 03 = 45° •
Simple thickness modes occur when displacement components are only a function of the x3 coor-
dinate and time. In this spcci:d case, the three types of plane waves each can propagate between
the top and bottom surface, indepcndcnt of the other waves, setting up separate plate waves which
can bc dcrivcd from the standard plate wave equations by setting _ equal to zero. Also, simple
thickness modes are _mwn as through the thickness transverse resonances (TTTR). These modes
correspond to where the higher order modes cross the ordinate (w-axis) on the dispersion curve (see
figurc 6). Since the phase vclocity is defined as v = _o/_, the phase velocity for the thickness modes
is infufite.
The manncr in which the phase velocities drop from infinity for the higher order modes, when
becomes nonzero, can be seen h_figure 8. Also, note the slope of the dispersion curve for the higher
order modes, near the tlfickness modes, are relatively low (figure 7), indicating that the group ve-
locity or rate of energy flow is relatively low. Thus, these modes are characterized by rather high
phase velocities and rather slow modulating (group) velocities. Moreover, the first order symmctric
curve has a negative group vclocity, indicating that energy should be flowing toward the source.
40

Iloweverasa generaltrend,thesecurvesstai'twith a veryhighphasevelocityanda ratherlow
groupvelocitiesandmoveto higher group velocities (ie. the curves turn upwards at larger slopes)
with lower associated phase velocities. Additionally, the higher the mode tile flatter the curves tend
to become (in general) and hence the less the group velocity. Generally, the higher the mode, the
higher the phase velocity and the slower the group velocity. Phase velocities and group velocities
vary along each of these curves and vary from curve to curve; hence, a great deal of dispersion is
associated with these higher order modes. It is again very important to note that for lfigher order
modes the frequency of the resulting wave changes very little with _. Thus, maJly ray angles of
input (8 0 result in similar frequencies, tlence, a lot of energy may be created around these fre-
quencies.
Another interesting facet of the analysis of the Rayleigh-Lamb wave problem is the consideration
of imaginary and complex wavenumbers for _. Although, the existence of imaginarY wave numbers
was recognized earlier, it was not until the 1950's that they were actually included in the analysis
and given physical significance. A great deal of this work was done by Mindlin, generating an in-
teresting body of literature. The amplitude of the wave for imaginary values of _ lead to the wave
being attenuated as the wave travels in the x t direction. Physically, for a finite plate, the energy
from this mode is channeled to edge waves on the side of the plate. Work by Mindlin shows that
in some cases these edge modes can still show significant displacements up to 30 times the plate
thickness from the edge (ref. 112). ]'his type of phenomenon should be kept in mind for situations
when ultrasonic work is done on finite specimens, such as small laboratory samples.
Another interesting discovery was the existence of a second edge mode wtfich is very constrained
to the edge, if the frequency of thc propagating wave is greater than the first symmetric thickncss
shear mode. Also, Mindlin and Fox solved the problem of the real part of the solution for the
antisymmetric mode of a plate bounded on a single side. Ilowever, in general a total solution has
not been found for a fully bounded plate, which includes all edges and complcx wave numbers.
41

2b
X 2 _ 7- .... _ .
_.._ ' _I-
_V, 3_V_
b 2b
'_ - _ - T -----_ =_,___ _+ --;---,
2--F- b 2b
Figure 7. Simple thickness mode [ref. Ill
42

6
P.
.-4
P_
,-4
500-
500-
3o0
VL
20O
.,_'VT
vTloo
V
.....ssymmetrlc
__ eymmetrlc
Frequency Thickness Product in mil-Mhz
P
Figure 8. Velocity versus frequency [ref. 59]
43

The plate problem for an isotropic plate has a rich history, starting with experimental investigations,
followed by elementary solutions from many of the great scientific minds of the time. Eventually,
the general solution was obtained by Rayleigh and Lamb, showing that the elementary solutions
are approached in the limit of low frequency. Furthermore, they showed the dependence which the
output has on the input wave forms and how these relate to the actual plate modes. For example,
simple thickness modes occur for an input of a zero wave number in the x_ direction, a totaUy
vertical input wave. Also, a Goodicr-Bishop wave results if/_ is zero. Finally, it is intercsting to
note that the most general problem for all sides bounded is not as of yet solved, in general, however
particular aspects of it have been solved, showing the physical relevance of complex wavenumbers.
Anisotropic Plate Waves
Several investigators have looked at the problem of plate waves in anisotropic materials. As might
be expected, the anisotropic constitutive relation greatly complicates the analysis of the plate wave
problem. A variety of extra plate wave modes are created due to the extra modes of plane waves
which are possible. Also, the properties of the Lamb waves (ie. dispersion curves) depend on
azimuthal angle. Further complications arise due to the fact that all modes are coupled into the
same equations, hence vastly complicating numerical procedures. In fact, the full analysis of the
anisotropic problem would be prohibitive without the use of the computer, ttowever, Ekstein did
formulate the full analytical solution to the problem for the case of orthotropic symmetry in 1945
(ref. 113). Detailed analysis of the dispersion relations of anisotropic materials were not developed
until Mindlin and co-workers used a variational approach (ref. 52). More recently the method of
transverse resonance or partial waves has been forwarded as a solution technique (ref. 127). Since,
this method is the basis of the approach used here to solve the plate wave problem for composite
plates, a short synopsis of this method will be provided for future reference.
In the method of partial waves, plate wave solutions are constructed from exponential waves that
are reflecting back and forth between the bottom and top surfaces. This approach considers plate
44

waves to consist of traveling waves in tile direction of propagation and standing waves through the
thickness.
The exponentM trial solution is expressed as
ui = _i exp[ i(kixi - cot)]
'Ilffs is then substituted into the Christoffcl matrix to obtain
(kilClakjj - pro2 6ij)u j = 0
In tiffs work, the subscript convention is as follows
i,j= 1,2,3 I,J= 11,22,33,23,13, 12
The k a matrix is defined as follows
k x 0 0 0 k z ky
kiI=[O ky 0 kz 0 kx 1
o o kzk kx o
and ksj is the transpose matrix. ]'he partial waves are coupled to each other by reflections at the
surfaces in accordance with Shell's Law
k t = k = co/v
where v is the plate wave velocity. The particle displacement vector then becomes
= _j exp[ik(xl + 12x2)]
where
_=k2/kt
45

for every partial wave solution.
The substitution of the equation for u: into the Christoffel matrix results in a system of three ho-
mogeneous linear equations for the a_ values, with coefficients that are functions of density, fre-
quency, and the stiffness matrix terms. This results in a 6th order polynomial for 12with six
resulting roots
where
n=l ..... 6
Next, the displacement field may be taken as a linear combination of the six allowed partial waves.
Mathematically, this may be expressed as
6
uj = _ Cna_n) exp[ik(x + _n)z)],7=1
These expressions may be used with constitutive relations to yield stresses. These stresses may then
be used in the boundary conditions
1"12 = 1-32 _ a22 = 0
at z = + hi2. This leads to a system of six homogeneous linear equations where the coefficients of
Cn are now functions of p, cU,v = w/k, and hk. Setting the determinant of the system of equations
to zero results in the dispersion relations, which yields information on the dependence of velocity
on frequency. These can be used to derive the commonly used dispersion curves with the infinite
number of branches. Furthermore, the system can then be solved to fred relative values for the
Cn values. Thus, an indication can be obtained on the relative displacements occurring in the plate.
46

Asmentioned,investigationof theserelationsresultsin anumberinterestingphenomena.These
includea numberof additionalmodesnotseenin isotropicmaterials(rcf.11).Thegeneralchar-
acterof thedispersioncurvesfor anisotropicmaterialsis similar,howeverthecurveshavemore
jumpsandtheextramodesleadto extracurves.Also,thedispersioncurveisdifferentfordifferent
azimuthalangles.Additionally, pseudosurface waves exist, which leak energy (ref. 127).
Applications
The theory of Lamb waves has been utilized for a number of applications. Mindlin and coworkers
utilized the theory of Lamb waves to predict behavior of resonators for radio communications.
Also, the theory of Lamb waves has been used to explain acoustic emission results (ref. 129) and
for use in nondestructive testing (refs. 21).
Through Thickness Resonance
The through thickness resonance mode (simple thickness mode) corresponds to the constructive
interference of either a P-wave or an S-wave reflecting back and forth perpendicularly between the
top and bottom surface. This mode of plate wave corresponds to the intersection of the higher
modes with the frequency axis. As mentioned, these modes have a theoretically infinite phase ve-
locity. ]'he frequencies and displacements of these modes are simple to calculate and are given, for
an orthotropic material, by the following equations:
Symmetric Modes
X3
(a) u3 = B' sin(ms -_-) u I = 0 ra = 1, 3, ...
47

x 3
(b) ul=C'cos(m_ _-) u3=0 n=2,4,...
Antisymmetric Modcs
(a) u l=D'sin(nrr@b ) u3=0 n=l,3 ....
(b) u3=A'cos(mrt@b) ul=0 m=2,4 ....
Frequencies
mvp m;
C44 ).s ( _5 ).sUp=(c-)----L)'5 v,=(----y- v,= --
For lsotropic Materials
EC33 = (I- v)(I+ v)(l- 2,0
E
c_4= G5 - 2(_+ ,:)
where t is the plale thickness, N = 1,2,3,... and C,s are stiffness matrix values expressed in reduced
tensor notation (reference 13). Ilence, if C_ does not equal Css, extra resonances may occur
through the thickness. Also, for materials in which the x:axis is not in a pkmc of ortholrol,ic
symmet_', the shear wave velocities arc affected by coupling terms in the stiffness matrix.
48

Also,theshearwaveresonancesarepolarized,for anisotropicmaterials,dueto thepolarizationof
theS-wavesin thex3 direction. This is suspected of contributing to experimental results presented
in chapter 4.
The simple thickness vibrations described by these equations are for very idealized conditions, with
infinite plane waves propagating absolutely normal to the top and bottom surfaces. However,
understanding these results may be of some use in understanding AU results. First, although much
of the AU wave disturbance is not due to plane waves resonating absolutely perpendicular to the
top and bottom surface, the AU waves are thought to be a result of reinforcing of plane waves with
very small angles from the normal, ttence, simple thickness modes may have many of the same
properties of AU waves, and thus physical understanding of the AU waves may be gained by
understanding simple thickness modes. Additionally, understanding how plane waves combine to
meet boundary conditions and cause resonance may help to understand how the very early low
frequency, low amplitude part of the AU signal is created. This problem may be better understood
by relating Green's function results to Lamb wave equations. Although the early part of the signal
is of very low amplitude, it may provide a great deal of information concenfing the state of the
material, tlence, understanding the simple thickness mode may be very useful in understanding
the AU method.
Analytical Ultrasonics
Analytical ultrasonics entails measuring material microstructure and other variables which control
the mechanical behavior of materials (refs. 20, 21 and 25). The ultimate goal of this approach is
to be able to assess a material's strength, moduli, touglmess, and other properties which can be used
to predict future material behavior: The realization of this goal will depend on developing more
advance models of wave/material interaction, better understanding of basic material behavior, better
49

understandingof excitationmechanics,betterexperimentaIequipment(transducersetc.),proce-
dures,andmoreadvancedsignalprocessingtectmiques.I Icnce,advancementof analyticalultra-
sonicsrequiresimprovementin wavepropagationmodelsandbetterexperimentaltools. A few
comments,concerningthisarea,isprovidedin thissectionto provideinformationwhichmaybe
pertinentto theAU method.
Green(ref.27)givesa goodoverviewof thegeneralstateof teclmologyin analyticalultrasonics.
IIe discussespertinentissuessuchas materialbchaviormodels,waveexcitationsources,and
measurementmethods.SincetheAU method and analytical ultrasonics are undeniably couplcd,
issues important to analytical ultrasonics are important to AU and vice-versa. In general, analytical
ultrasonics uses wave propagation theory and experimental work to prcdict the future behavior of
materials.
First, the attenuation of a wave can be used to obtain information on a matcrial. The attenuation
of a wave in a material may be caused by material dissipation mechanisms, scattering, reflection of
the wave or more likely a combination of all of these. The measurement of stress wave attenuation
is the method used to produce the often used ultrasonic C-scan. In many applications, the attcn-
uation of a stress wave as a function of frequency is measured (ref. 36 and 74). Tiffs is especially
useful for obtaining detailed information on microstructure. Models of this are discussed later.
w
Another source of information derived from stress wave propagation is the wavespeed. A simple
application of this is the use of wavespeed to measure the moduli of a material. In fact, Kriz and
Stinchcomb (ref. 128) used this approach to obtain the full stillness matrix for a Gr/Ep composite.
More recently, Kline and co-workers (ref. 17) have developed a method where obliquely incident
waves are transmitted into a specimcn and received at another point. This is performed during an
ultrasonic C-scan at several orientations and then a numerical procedure is applied to the wavespeed
measurements to detemaine stiffness matrix quanities. Other researchers have utilized the meas-
urement of the phase velocity of Lamb waves as an NDE method (refs. 12, 13, and 89). Also,
wavespeed measurement is used to dctermine residual stress. This is due to the inherent nonline-
50

arityof materialmoduliandchangesin densitydoto changesinbulkvolumes.Acousto-clasticity
(ref.38)isa specificsubareaof elasticitydevotedto thestudyof this phenomenon.
Dispersion is another phenomenon associated with wave propagation that can yield information
on micro- (rcf. 51,105, and 107) and macro-structure. Dispersion is when waves of different fre-
quency travel at different speeds. This can result in sine waves of varying frequencies separating in
the time domain (see experimental results). Dispersion can be caused by small panicles or phases
in a material that effect the acoustic velocity of waves for certain frequencies of wave propagation
and by waveguide dispersion (e. g. note the nonlinearity of I,amb wave curves).
Also, of concern in analytic',d ultrasonics are developments in mathematical theories for analyzing
waves. Equally important is the development of computational methods for making calculations
based on the mathematical theory. One example of tiffs type of work is that of Pao and co-workers
with the generalized ray theory (ref. 122) for calculating transient plate responses. Also, the Green's
function has been utilized to calculate transient plate responses (rcf. 121). Also, Vasudcvan and
Mal (ref. 129) have used a transform integral technique to determine the transient response of an
elastic plate to a buried source. This involves summing residues of the dispersion relations from
the boundary conditions and transforming from the frequency domain to the time domain. The
residues occur at the through-thickness-transverse-resonance frequencies mad at the minima of the
first order symmetric and third order antisymmetric mode. The procedure excludes the effects of
the negative group velocity regions. Also, a small complex perturbation term was introduced into
the FFT to account for attenuation. Their approach and results seem to show some correlation
with the work in tiffs dissertation.
Aimther area where wave modeling can be applied to ultrasonics is trying to understand the near
field (Fresnel field) and the far field (Fraurthafer region). The Fresnel field is ch,'u'acterized by re-
gions of alternating pressures. The Fraunhafer region has lobes of fairly constant pressure (de-
scribed by r- 0 plots (ref. 21).
51

Also,Claes(ref.140)hasoutlinedanimerestingsolutionto theplatewavesolutionin anisotropic
platedueto anaxisynunctricsource.ThesolutionyieldsBcssclfunctionswttichaccountfor the
decreasein amplitudedueto wavesdiffusingfromthesource.Thesolutiondegeneratesto abasic
planewavesolutionat a largedistancefromthesource,
Mathematicalmodelsof frequencydependentattenuationhavebeendevelopedandhavebeenused
to explainultrasonicdata(ref.74),A parti,'d list of attenuation mechanisms and their mathematical
effects are listed below:
Rayleigh scattefing-c_, = c,a_
Stochastic scattering-% = cpap
Diffusion scattering-_a = cda 1
Itysteresis losses-ah = cjf
Thermoelastic losses-e, = cp
Viscous losses-show second order frequency dependence
Absorption losses (dislocation vibration, hxtem',d friction, and relaxation effects)-show second
power down to first power effects on frequency
In the above expressionsfis frequency and a is the grain size or discontinuity size. Various authors
have attemptcd to relate these models to form single equations describing the frequency dependent
attenuation of various materials (ref. 74).
An inlportant facet of analyticM ultrasonics is understanding the transducers. A number of papers
have been published on various ultrasonic sources which may be utilized (rcf. 68). These sources
include:
52

I'iezoelcctric
Gasjet
EMA'F
Laser
Sparkgasdischarge
Iligh resistancemetalsheets
Capacitance
Thephysicsassociatedwitheachof thesesourcesisa separateareaof research.
Thepiezoelcctfictransducer itself is continually being refincd and improved, resulting in a great
numbcr of different transducer properties. For instance, new products, such as KYNAR t'drn (ref.
165) and dr3" coup]ant transducers (ref. 166), are adding to thc possible choice of piczoclcctfc
sources. Characterkzing the properties of various transducers and undcrstanding thcir effects is a
heavily rcsearched area of ultrasonics (refs. 133 and 110). The folIowing are just a few of the con-
cerns with characterMng piezoelectric transducers:
Relationstfip between voltage-current and force-displacement (Linear system response matrix)
(ref. 133)
Transducer diameter (rcf. 21)- see fig. 9
l'hase cancellation effccts (rcf. 152)
Uniformity of displacement on transducer face
53

Frequencyresponseof transducer(fig. 24, chapte r 3)
Crystal type (longitudinal or shear)
Proper orientation of transducer in casing
Coupling mechanism and effects
These effects strongly influence all analytic ultrasonics methods and most assuredly results seen in
the AU method.
l:inally, advances in signal analysis are of great interest to researchers in analytical ultrasonics. For
instance, a number of early papers on the AU technique (rcfs. 7 and 63) were concerned with signal
analysis. These involve areas such as pattern recogrfition (rcf. 143), Fourier analysis, analytic signal
(ref. 16), and various fields of digital signal processing (rcf. 2). Many of these concepts will be
covered in the following section.
A cousto-ultt'asonics
The acousto-ultrasonic technique involves exciting ultrasonic stress waves at one position on a
material surface and sensing the wave at another position on the same material surface. In general,
various excitations, sensors and analysis software can be used to perform the method as is shown
in figure 1 (chap. 1). Most implementations of the method to date have involved using ultrasonic
piezoelectric transducers for both sending and sensing the stress waves. However, the use of pulsed
laser excitation of stress waves is currently under investigation by several investigators (ref. 161).
Two major advantages of the AU method over other commonly used methods are that:
54

Small transducer 3oo_-
2%"- -_- _
J
_10o
80 100
0 o
20
_. _ 10°
°°o°_o- -_,o_--- "_fa/i.of! 60 _/
Figure 9. Effect of transducer diameter [ref. 21]
55

Accessto onlyonematerialsurfaceisrequircd
Canpropagatestresswavesin dircctionof loading
Ilence,"although a number of methods exist for nondestructively testing a materkd, the AU method
has the advantages of only requiring access to one SUl'facc and yielding information on in plane
material properties.
The general contcntion of the AU method is that a section of material which adequately transmits
stress waves will also properly transfer stress under loading and hence be less prone to fracture.
Thus, one facet of the AU method is to simply make comparisons of the energy content of m_ ul-
trasonic signal that is propagated between two positions on a piece of a material. The idea is that
if a high energy" content signal is produced between two points, then the area of material between
those points will be able to resist fracture more than a similar area of material between two points
where a weak signal is obtained. For instance, a damaged area (delaminations, matrix splits, de-
bonds etc.) will, in general, reflect mid absorb energy in a stress wave and will "also, in most cases,
(except in certain instances where stress concentrations are lowered) result in areas where fracture
may initiate.
Understanding the mechanics of how damaged areas interact with stress wave propagation encom-
passes areas of the theory of stress wave propagation and analytical ultrasonics. Ilowever, the first
step in understanding any ultrasonic method is to develop a model for the idealized case where
simple material constitutive relations govern the problem and the material is in perfect condition
(defects and damage do not alter the material's response). Then, more complex material behavior
may be accounted for by adding to the simple model or by using the simple model as a basis for
developing more complex models.
56

Early Research
The name acousto-ultrasonic is derived from ultrasonic evaluation and acoustic emission monitor-
ing; in fact Vary attributes the basic idea to acoustic emission work done by Egle and Brown (ref.
137). Egle and coworkers utiliz.ed what became tile AU configuration to simulatc acoustic emis-
sions in order to better undcrstand acoustic emission results (ref. 134).
It should also be noted that prior to the actual adoption of the AU method for composite materials,
similar types of experimental configurations were being utiIized for conventional materials (ref.74).
The pioneering work on the AU method was conducted by Vary and co-workers at NASA Lewis
(Ref. 5). This work entailed introducing the term Stress Wave Factor (SWF) to quantify the energy
in the AU signal. The SWF involves measuring discrete voltages in the signal at a selected sampling
rate and counting the number of voltage peaks above a preselected threshold voltage. SWF meas-
urements were made in the cross fiber direction on a number of unidirectional Graphite/Polyamide
composite coupons wlfich had been subjected to varying cure pressures. Next, the coupons where
subjected to a three point bend test to determine interlaminar shear strengths. Results showed that
the lower cure pressures resulted in lower SWF and lower material strength. It was also noted that
the lower cure pressure resulted in a greater void content. In general, this early work showed that
AU can be used to give a relative indication of interlaminar shear strength for unidirectional com-
posites. Figure 10 shows the results obtained by Vary and coworkers.
The initial work by Vary and co-workers stimulated additional investigations by other researchers,
that resulted in a number of observations and methods of signal quantification.
First, Govada et. al. supported Vary and coworker's results that SWF measurements taken at dis-
crete locations along the length of a thin composite specimen could be used to predict failure lo-
cation for uniaxial loading (ref. 88). The basic premise of this work was that the area of low SWF
57

e-.4,..I
t-(D
CO$,.
¢De-
¢D
120
11o
Ioo
90
80
70
(..1 I! = 0.60 TO O.G2-- 0 I t" O.G2 10 O.6q
0 I I" 0.6_ 10 0.66
/D
-- 0 0
I , ,
80 90 100 110
SWF
I120
Figure I0. SWF as a function shear strength [ref. 137]
58

would be the area of failure during unidirectional loading, l lowever, tile work revealed that an
averaging tcclmiquc h;_d to bc used which accounted for the proximily of the sending transducer
to the area being measured.
Further work at Virginia Polytech_fic Institute (VI'I) revealed that the SWF factor decreased with
fatigue loading (rcf. 6), hence, showing that the AU technique is a good qu,'mlifier of fatiguc dam-
age. In fact, figure 11 ,_hows how the SWF factor (energy measurement) compares to stiffness
measurement as a function of fatigue life. As mentioned, this indicates that the AU measurcment
might be a more scnsitive measurement for use in fatigue models than stiffness dcgradatkm.
Early work by Willi_uns and coworkers at Massachusetts Institute of Technology involved evalu-
ating impact damage (ref. 56). Also, work was done using frequencies generated in the AU tech-
nique to determine the dispersion of composite materials at those frequencies (up to 5 MIIz) (rcf.
30). It was found that no material dispersion occurred at these frequencies. Further work by
Karaguclle invoh'cd using ray tracing techniques to model the AU technique in an aluminum plate
(ref. 49). This model a_sumed the transducer imported a uniform normal stress where the
transducer contacted the specimei_ and treated the elasticity problem as a half space problem to
calculate resulting wave propagation. The successive reflections of these waves ark traced to deter-
mine the resulting behavior of an alunlinum plate. I Iowever, the solution teclmique and certain
assumptions cause numerical instabifities if hi). < 1.6, where k is the plate thickness and 2 is the
wavelength of a P-wave. Tiffs causes problems in trying to apply this theory to experimental re-
sults found using the original AU set-up.
Williams and coworkcrs also discussed the possibility of exciting structural resonances in certain
configurations (ref. 112), however, the frequencies of these resonances must be in the range of the
input transducer and other experimentM equipment. Generally, structural resonances are not ex-
cited with the conventional AU set-up in laboratory conditions, but depending on the equipment
and structure, structural resonances may very well be SEt-up during field application of the AU
59

1.0 i
Gr/Ep [0,90,_45] s
'fness
III
,80 | J ! "----0 10 20 30 40 50
NUI_EROF CYCLES (x 103)
6O 70
._1
Z
Figure I I. SWF and stilTncss as a function of fatigue cycles
6O

method. The matching of experimental equipment to the malcrial and structural application should
be considered separately for each application of the AU technique.
Subsequent advances involved the introduction of more advanced signal processing tectmiques.
This helped to develop a more rcfmcd method and helped to start explaining the physics of the AU
method.
Karaguelle and Williams applied "homomorptfic signal processing" to the detection of flaws in an
aluminum plate (ref. 63). This work involved picking out the signal from one particular reflection
pattern, by deconvolving a short portion of the signal which may contain multiple reflections.
Takeja and llenncke introduced the use of theory from random noise involving moment calcu-
lations from the frequency domain to quantify infomaation in the AU signal (ref. 7). Moment
calculations were obtained by integrating the product of the AU signal's spectral density function
(obtained by taking the FI:T of the AU signal and squaring amplitude values) and the frequency
over the frequency domain. Parameters can then be calculated, from these moments, that dcscribe
certain characteristics of the signal (e.g. energy content and centroid frequency). This approach
marked the begimling of the evolutionary process which led to this dissertation. IIcnce, a more
dctailed description of the work done using this approach is provided. This includes a description
of software, basic equations, and ensuing experimental results. The program described below is an
earlier version of the program used to obtain results in chapter four; however, this program was
used to generate results for this chapter. These results will be discussed in the chapter on physical
understanding.
A U Analysis Software
In particular, a description is presented of a computer software package used to analyze the AU
signal (ref. 10) and generate results. The intitial step in the computer analysis is to retrieve the
61

digitalsignalfromthestoragedisk,whereit hasbeenstoredduringtheAU dataacquisitionphase.
This involvesreadinginformationon gatingparametersandthenthebit representationof each
voltage.Thesebit representationsareusedto calculateactualvoltagesandtimev',dues.Next,
voltage/timegraphscanbegeneratedfor observationof generalsignalcharacteristics.Additional
subroutines allow for the signal to be gated and for any DC bias to be removed from the signal.
Estimates of wave arrival velocities are made by dividing the transducer separation distance by the
time of wave train arrival (ie. ftrst non-zero voltage reading) as measured from the instant of trig-
gering. In addition, phase velocity estimates were made for certain cases by increasing the
transducer separation distance and noting the translation in the time domain for a particular point
in the wave pattern display, wave train. A peak in the time signal could be followed on the com-
puter screen as the receiving transducer was moved away from the sending transducer. For certain
signal content, the general shape of the signal changed very little as the receiving transducer was
translated on the specimen. Hence, this procedure was applied to parts of the wave train which
contained predominately a single frequency content in order to determine a wave speed to be as-
sociated with a particular frequency of wave motion.
A fast Fourier transform (FFT) algorithm was used to yield frequency domain information on the
gated digital voltage/time data. The voltage/time data was gated from the first non-zero voltage
reading to the end of the wave train. Using the FFT, amplitude/frequency and phase/frequency
data were generated, the amplitude/frequency data were plotted and AU parameters were calculated.
The equation describing the amplitude values calculated via the FFT is:
n-I
1 Nj-av e-l(2_rkr/n)"¥k="_ _..,i r
r_-O
where v, are voltages andfk = k/(nAt) is the frequency corresponding to Xk.
62

Thedeterminationof AU parameters involves calculating various moments of the spectral density
(the square of the amplitude values S, = X_) about the vertical axis, S, axis (see figure 12). For
instance if S(/) is the continuous spectral density function, the n-th moment is defined as:
E
u. = l s(/)f'df,J0
where f_, is the Nyquist frequency. In the case of digital data, the integration is replaced by a
summation to yield:
(m- 1)
-'_ (sk+ sk+_)M_= 2
k=O
aj(/k + aJ72)L
where S, are the spectral density values, f, are the corresponding frequency values and Af is the
fiequency difference between f, and f,+t. For instance, the zeroeth moment (M0) is defined as:
Mo= f['S(/)df
or for the digital data obtained experimentally
(m- 1)
--_ (.%+ sk+,)M°= 2k=0
Af
M0 is simply the area under the spectral density curve. This can be analytically related to the mean
square of the voltage signal. For application to AU signal evaluation, 7140is renamed A I. There-
fore, A1 is an indication of the amount of energy in a received signal. A2 is defined as M_/Mo and
is the central frequency of the signal. A signal with a higher A2 is transferring proportionally more
energy at higher frequencies than lower frequencies when compared to a signal with a lower A2.
63

In addition,A4 is de£medas(MJM2)" and A3 is dcfmed as (M21Mo).5. A4 is the frequcncy of
maxima and A3 is the frequency of zero voltage crossings (rcference 5, page 92). The quantity
A4/A3 is known as the distortion factor and is an indication of the amount of high frequency signal
in a predominantly lower frequency signal. Figure 12 indicates how the momcnts are related to the
spectral density function. Again, it should be kept in mind that tile spcctral density function is the
square of the amplitude function for a given frequency value.
In order to obtain more specific information on the acousto-ultrasonic signal, filtering capabilities
were included in the the digital signal software analysis (refs. 9 and 10). Basically, tiffs involves
calculating M0 for a particular frequency range. Thus, the area under a specific portion of the
spectral density curve can be obtained. Mathematically, this may be expressed as:
M0 = t s0qaf,
where S(/) is the spectral density function, f_ is the low frequency end point and £ is the high fre-
quency end point. In the summation equation, this involves only. surmning for the values of k
which correspond to the S k values of intercst (ie. corresponding to a peak). In particular, this fea-
ture is used to fred the area under one frequency peak ha the amplitude/frequency plot, yielding a
parameter which is indicative of the anaount of energy transferred at a particular vibrational fre-
quency range. Initially, observation of amplitude/frequency plots revealed the occurrence of certain
amplitude pcaks at the s,'une frequency for a given plate thickness, regardless of plate lay-up or
azimuthal angle. The amplitude/frequency plots for different azinmthal angles were then exarnh_ed
to determine values forf andS. Next, the determincdf and£ values were used to calculate filtered
moment values from the AU signals obtained at diffcrent _imuthal angles. Figure 12 displays how
filtered A I values are calculated and the nomenclature used for a particular calculation.
64

s(f)
Spectral
DensityFunction
(SDF')
fl fp fh fm
(f) frequency
S(f)-Magnltude of spectral density (Amplitude
f - Frequency
M a- fOfm S(f)fadf
to _lltM o • S(f)df
squared)
n-th moment
O-th moment (Area under curve )
Definition of Filtered SWF Parameter
Al(f_,fk )- fJ_S(f )de
f_- frequency of maximum SDF for peak
fI-low frequency for chosen filter
fh-high frequency for chosen filter
Figure 12. Calculation of filtered A1 values
65

Results
The observation of ti,ne domah_ results and amplitude/fi-equency plots revealed basic hlformation
to be used in understanding the AU method as well as providing inli)rmation to be uscd for both
calculating and [ntcrprctating AU parameters. I:igures 13 and 14 show some sample voltage/time
(V/T) and amplitude/fi'equency (A,.F) plots. Figure L3 shows the dominance of the 1 NIllz and
the 3.4 MlIz frequency peaks in the spectrum for the signal obtained in the 0 degree direction of
the 4-ply zero degree plate with no gate applied to the signal. Also, it should be noted that thc 3.4
M llz peak is about 75 percent the amplitude of the 1 M IIz peak. In contrast, the voltage/time plot
hi the 90 degree direction for the 4-ply zero de_ee plate C,figure 14) revealed a signal with only the
I MIIz signal content and shows a steady amplitudc throughout the signal, without the high signal
content early in the sig/m]. Observation of the corresponding amplitude/frequency plot reveals lhat
the 3.4 Mllz frequency content is still present, but comparatively less than the dominant 1 Mllz
content.
To gain insight into the influence of plate thickness on thc observed AU behavior an 8-ply 0 degree
l_minate was examhled and directly compared to results obtained on a 4-ply 0 dcgree laminate. A
summary of observations made from voltage/time and amplitude/frequency plols in the 0 arid 90
degree direction foUows:
]
For 4-ply laminates amplitude peaks in the amplitude/frequency plots consistently occurred
at 1 Mllz and 3.4 Mllz
For 8-ply laminates amplitude pe;_ks in the amplitude/frequency plots consistently occurred
at 501) kllz and 1.7 Nlllz
The cxpcrimcntal results for the variation of AU parmncters with azimuthal angle for the 10,0,0,0]
laminate can be seen in figures 15-18. l:igures 15-16 show the variation of A I and A2, rcspcctivcly.
66

U0LTA -,2gE-g2GE
-,50E÷_0TIME
FPequencg FilenaMe: .oncOSg,dat(MHz)
Figure 13. a)V/T b)A/F, in unidircctional panel-0 deg. dir.
87

8,50E÷00
U0LIA O,00E÷OBGE
TIME
8.21E-B6
AMP @,liE-g6L
L64E-IB / +87
Figure 14. a)V/T b)A/F, in unidlrectio,al panel-90 dcg. dir.
68

Theplot of AI versus _imuthal angle for a 4-ply zero degree laminate (figure 15) shows the de-
crease in A1 with azimuthal angle up to 45 degrees and then thc relativcly constant value ol)taincd
between 45 and 90 degrees. The plot of A2 versus _imuth'a_l ,'uagle (figure 16) shows a pc:d_ A2
value at 15 degrees. In gcncral, unidirectional pancls showed a peak A2 value bctweccn I0 aaad 20
degrees to the fibcr direction (tiffs same type of variation also occurred for the A4/A3 paramctcr).
The variation of E, with azimuthal angle is compared with the variation of AI in figure 15. The
behavior of AI and A2 with azimuthal angle seen in tiffs data has also bcen seen by another re-
searcher (rcf. 99). Figure 16 also shows the variation of the coefficient of influence with azimuthal
angle and how it compares to A2. Ilcnce, AU seems to mimic the variations in material properties.
One purpose of AU modeUing is to determine the exact relationship, so that AU may be used to
make more exact evaluations on how material propertics vary with azimuthal angle. Figures 17 and
18 show the variation in energy content for the resonant peaks at l.(I Mllz and 3.4 Mllz, by dis-
playing how A1(.8,1.2) and A1(3.2,3.6) are affected by change in azimuthal angle. The variation
of A1(.8,1.2) with azimuthal angle is similar to that of AI. Also, notice that the behavior of
A1(.8,1.2) seems to show the same behavior as E, (figure 17), once again showing the relationship
between AU response and mechanical properties, l lowever, notice that the A1(.8,1.2) descends
more rapidly and reaches a fairly constant value at approximately 30 degrees. The plot of
A 1(3.2,3.6) versus azimuthal angle reveals a much slower descent of A 1(3.2,3.6) at angles under 20
degrees and then a quick descent to a fairly constant value between 20 degrees and 45 degrees,
showing behavior more similar to the reduced stiffness matrix value Q_, (figurc 18). The plot of
A1 versus azimuthal angle (figure 19) for the 190,0,0,90] plate exhibits a quick descent from a rela-
tively high value at an azimuthal angle of 0 degrees and a slower descent from a maximum value
at 90 degrees, reactfing a mi1_unum value between 40 and 50 dcgrces. Also, the charactcrislic peaks
at 15 degrees to fiber directions for the [90,0,0,90] laminate can be seen in figure 20.
Figure 21 displays a plot showiJlg the rather extreme decrease hi A1(3.2,3.6), especially in the fiber
direction, for AU on a specimen with a delamination. Also, the value of A2 tbr the case of de-
69

lamhaationisshownto lose the characteristic peak at 15 degrees. Also, notice the plots compare
AU parameters to tile variation of material properties. This is also discussed in reference 9.
Current attd Future State erA U Alethod
Currently, a number of investigators are working on various applications of the AU technique.
For instance, Duke and Kiernan have looked at tile use of the AU technique to predict the direction
of damage development in impacted Gr/Ep panels (refs. 100). "[his includes understanding the ef-
fect fatigue damage has on AU results compared to tile effect it has on impact damage. Ilcnce,
efforts are already underway to use the AU method to dctemline the effect damage has on future
material response. Finally, this research has looked at how the variation of AU with azimuthal
angle is altered by damage resulting from impact. In some instances, this has caused change hi the
location of high AU values. It may be that this gives some indication of how stress is redistributed
for loading of impact damaged specimens (note the tfigh AU measurement is not necessarily for
right over the d,'maage, but for close to the damage). I Ience, this could be utilized to determine a
stress concentration factor and suggest the direction in which damage may grow. This research has
•also shown which AU parameters are most sensitive to carly fatigue damage. Other applications
include the use of the AU technique to detect the density of trans-ply cracking in composites (ref.
102) and the application of the AU teclmique for predicting hygrothermal degradation (ref. 103).
Other authors have utilized the statistical nature of A U measurements to quantify damage (rcf. 146).
The AU method has also found appfication to such diverse areas as adhesive joints, bones, and
wood (ref. 144, 145 and 167).
Future work with the AU method may involve using the analytic signal to quantify the AU signal.
"lhis approach would allow measurements of energy rate and group velocities. Also, tiffs may be
combined with other advanced forms of digital faltering to gleen even more detailed information
from the AU signal.
7O

MODULUS AND A1 VERSUS ANGLE[0/0/0/0] GR/EP
25
2O
15
10
5
00
MODULUS MSI
X
X X XI _ X X I
2O 40 6O
AZIMUTHAL ANGLE
_MODULUS x A1
"---'---XXI
8O
A10,006
0,005
0,004
0,003
0.002
0,001
0100
Figure 15. AI, modulus vcrsus azimuthal angle for [0,0,0,0] laminate
71

POISSON'S RATIO AND A2 VERSUS ANGLE[0/0/0/0] GR/EP
0,35
0,3
0.25
0,2
0.15
0.1
0.05
POISSON'S RATIO A2 (Thousands
X
0 I I ! I 0
0 20 40 60 80 100AZIMUTHAL ANGLE
_ POISSON'S RATIO x A2
1400
1200
1000
8OO
6OO
400
20O
Figure 16. A2, Poisson's ratio versus azimuthal angle for Io,o,o,o] laminate
72

MODULUS AND A1(.8,1.4) VERSUS ANGLEIO/0/0/O] GR/EP
25
2O
15
10
5
00
MODULUS MSI A1(.8,1.4
x X
x xI _ XX I I X
20 40 60 80
AZIMUTHAL ANGLE
0.004
0,003
0,002
0,001
0100
MODULUS x A1(,8,1,4)
Figure 17. A!(.8,1.2), modulus versus azimuthal angle for 10,0,0,01 laminate
73

Qll AND A1(3.2,3.4) VERSUS ANGLE[0/0/0/0] GR/EP
25
20
15
10
5
Qll MSI A1(3.2,3,4) (1E-5)
(°
0 20 40 60 80 100
AZIMUTHAL ANGLE
I _ Qll x At(3,2,3.4) I
60
5O
4O
3O
2O
10
Figure 18. A1(3.2,3.6), modulus versus azimuthal angle for IO,O,O,Ollaminate
74

0,5A1
A1 VERSUS AZIMUTHAL[90/0/0/90] GR/EP
ANGLE
0.4
0,3
0.2
0.1
X
X X
X X
X XX X
0 I ! I
0 20 40 60
AZIMUTHAL ANGLE
x A1
X
X
8O
X
100
Figure 19. AI versus azimuthal angle for [90,0,0,90] laminate
75

A2 VERSUS AZIMUTHAL ANGLE[0/90/90/0] GR/EP
1600
1400
1200
1000
8OO
6OO
400
200
A2 (Thousands)
X
X
X
X
0 I I I I
0 20 40 60 80
AZIMUTHAL ANGLE
X
100
x A2
Figure 20. A2 versus azimuthal angle for [90,0,0,90l laminate
76

A1(3.2,3.6) VERSUS ANGLE4-ply unidirectional gr/ep
A1(3.2,3.6) 1E-4 A1(3.2,3.6) 1E-4
5"
4
3
2
5
4
3
0 [] [] [] rn _ _ _ '_ _ _' "_ _ 0
0 10 20 30 40 50 60 70 80 90 100AZIMUTHAL ANGLE
undamaged o delaminated
Figure 21. A1(3.2, 3.6) versus azimuthal angle for unidirectional panels: comparison between platewith delamination and undamaged plate
77

Although numerous applications of the AU technique have been found, there is still a general lack
of understanding concerning the physics of the method for the application to composite plates.
Several authors have noted that Lamb waves seem to be present in signals (re/'. 9 and 95). 1Iowever,
there seems to be no specific mention of the modes which are present and how they are excited.
Kautz (ref. 97) has suggested using the ray tracing technique as a model, but has yet to fully apply
the approach to composite materials. This approach involves modelling the high frequency portion
of the signal as a guided wave in the fiber. Other authors have suggested using diffuse wave theory
(ref. 148) to describe the AU technique. Itowever, a working model has yet to result from this
work. In general, although the AU method has been applied to a variety of applications for com-
posite materials, no real model exists for the method. Moreover, the basic physical understanding
of the wave motion occurring in the AU method is still not well understood. In order to gain full
advantage of the method and obtain quantitative information on the state of a material, a basic
model must be developed which relates the mechanical state of the material to AU results. Thus,
it is the goal of this proposal to understand the basic physics of the AU method for composite
materials and to propose an elementary model of material response associated with the AU method.
78

Experimental Procedure
A very important facet of modeling and understanding any NDE method starts with a thorough
consideration of experimental equipment, procedure, and analysis. As mentioned earlier, develop-
ing transducers, computer software, and AU systems is a subject of current research. Although
results have been obtained using a number of transducers and experimental arrangements, this
section describes very specific experimental arrangement and computer analysis which were used to
obtain the bulk of the results utilized for this work. Itowever, comments are offered on some re-
sults obtained with other experimental arrangements and the effect of changing various aspects of
the set-up on results. Also, comments are offered on how various aspects of the experimental
set-up and procedure relate to the physics of the problem.
The experimental equipment consists of a pulsing/receiving unit, a preamplifier, 2 piezoelectric
transducers, and an IBM-XT equipped with a data acquisition system. Each of these items can
be seen in the system set-up diagram, figure 22. It is very important to note, that for the exper-
iments discussed in tiffs work, the transducers are positioned normal to the face of the plate which
is under examination, ttowever, some additional experiments were performed with the transducers
at a ten degree incline. Material thickness, mechanical properties, and geometry are other very
important factors for interpreting and modeling AU results.
79

The major concern with an experimentM set-up, beyond instrumentation and proper clcctrical
connections, is the proper positioning of the transducers. This involves where on the plate each
of the transducers is placed, the uniform application of couplant, and placing proper pressure on
each transducer. The AU method characterizes the material between the sending and the receiving
transducer, where the sending transducer is pulsed to generate the excitation and the receiving
transducer senses the disturbance at another position on the material surface. IIencc, this mcthod
is concerned with characterizing a general region. First, the general size of this re#on is dcfincd by
the distance between the two transducers and the size of the active elcmcnts of the transducers.
'l'he distance between the transducers is defined by the variable d. Varying the vMue of d may be
utilized to gain information on the characteristics of wave propagation. Secondly, the dircctional
orientation of the transducers on the plate is an important parameter, especially when working with
anisotropic materials. This is characterized by the azimuthal angle (0), defined in chapter 2 (figure
3). Finally, the exact coordinates for the position or general area being characterized should be
determined. For instance, the coordinates of the point directly between thc transducers could be
utilized. IIence, a coordinate can be detined to designate a general region and then the variables d
and 0 may be varied to obtain AU signals to characterize the given region. Most of the results
presented in tiffs work are meant to show representative results for an undamaged composite plate.
Thus, the experiments were performed at the center of the plates, in order to minimize the effect
of edges. Therefore, the results given in this work will not state coordinates for the position on the
plate where the AU method was performed, tIowever, in this work major emphasis is given to how
varying d and 0 affects AU results, leading to physicM interpretation of the character of the wave
propagation generated and measured with the AU method. Also, results are itlcluded that indicate
how the transducer diameter a affects the AU signal. Additionally, consideration is given to how
the resonant frequency of the transducers affects AU results.
8O

Diagram of Instrumentation
(Trlgger Pulse)
IBM-PC
I Panametrics PulserGate
v,,,I i
Sending" Transducer-_ r_Recelvlng Transducer
I II-_---D ----_ _-(Cbmposlte Plate).
ICt)
(Signal to be'_"\ Digitized )
Figure 22. Experimental configuration
81

Experimental Set-up
The experimental procedure begins with the data acquisition board on the computer sending a
trigger pulse to the pulsing unit. Upon receiving the trigger pulse, the pulser produces a high fie-
quency electronic pulse, that passes to tile sending transducer. The sending transducer convcrts the
electronic energy of the pulse to a mechanical excitation on the face of the plate. This excitation
induces wave propagation motion in the plate, that travels in the plane of the plate. "l'he motion
induced by this wave propagation is sensed by the receiving transducer, which converts the motion
hom the wave propagation to ma electrical signal, q'lfis electrical signal is the source of signal
analysis for the acoustic-ultrasonic method. First, thc signal from the receiving transducer is am-
plified by a prealnplifier. Then, the signal from the preamplifier is sent to tile pulsing/receiver unit.
The pulsing/receiving unit allows for high pass filtering of the signal, gating of the signal, attenuating
of the signal, and further amplifying of the signal. The conditioned signal is then connected to an
analog to digital (A to D) converter board in the PC by means of a B NC connector. The A to D
board is triggered to start taking data by the same trigger pulse Milch is sent to the pulsing unit
initiating the excitation pulse. IIence, the time of a disturbance in the signal relates to the time after
excitation. The digital signal is displayed on the CRT screen in nearly real time, much as with an
oscilloscope. This can bc used to make immediate observations on lime domain information.
System software allows the sign_ to bc fi'ozen on screen and for spectral infimnation to be obtained
through an I:FT on up to 512 points. A screen displayed gate, whose length and position in the
time domain is keyboard controlled, is used for selecting the points to be used in tile FFT. Finally,
ttle signal can be stored for further analysis using keyboard control. Further analysis is performed
using moment calculation software, such as was described in the second chapter.
82

Description of System Cmnponents
Pulser/Receiving Unit
A Panametrics model 5052 pulsing/receiving unit was used to provide the excitation pulse, q'hc
energy and damping settings allow some control of the pulsc width and voltage. The exact re-
lationship between these sctthlgs can be found in the reference manual (rcf. 158). Four energy
settings exist which ,allow tile input amplitude to be varied between 100 and 300 volts (TYP), de-
pending on the damping setting. The damping can be varied fiom 25 to 500 ohms. The pulse
width varies between 10 to 600 nanoseconds, depending on the energy setting and damping. In-
creasing the energy setting or the damping causes the pulse width to increase. A high setting for
both causes a drastic increase in pulse width which may decrease the signal input of high frequency
energy and hence decrease the relative anaount of high frequency content in the output signal. The
receiving part of the unit offers the capability of anaplifying the signal either 20 or 40 dB and at-
tenuating the signal from 0 to 68 dB (with 2 dB incrcmcms). Also, the signal may be high pass
filtered above 1 k1Iz, 30 k11z, 100 kltz, 300 klIz and 1 Mllz. The upper cutoff frequencies are
well out of the range of the other electronic components.
Preamplifier
A l'anamctrics ultrasonic preamplifier with 40 or 60 dli gain settings was used. The bandwidth for
the prcamplitier is .02 to 10 Mttz. The purpose of the preamplifier is to anaplify the sign:d from
the receiving tr,'msducer, so that it is of proper amplitude for the receiving unit electronics. For the
work reportcd in this dissertation, the preamplifier seemed to have tittle effect on results, besides
anaplifying the signal. I towever, ff a battery operated preamplifier is used, care should be taken not
83

to let thebatteriesrun low. In earlyexperimentswithbatteryoperatedpreamplifiers,it wasnoted
that amplitudes of AU signals decreased due to batteries losing power. The major concern with
preamps powered from electrical outlets is making sure the power line is clean or isolated from noise
in the working frequency range. The other major concern is that the signal is well inside the
bandwidth of the preamp, again this had little effect on the results reported in this dissertation.
Transd ucers
Transducers are probably the most difficult part of tile system to characterize and model. Research
in this area is discussed in the literature search. In addition to the hflaerent difficulty of character-
izing the response of the transducer, is the problem of understanding how the couplant transmits
the pulse of the transducer to the material surface. This includes concerns with keeping the
transducer properly oriented. For the tests performed, SONOTRACE 30 t ultrasonic couplant was
used. The couplant proved to be fairly viscous, so care had to be taken in applying the couplant
eveniy. Finally, the viscous nature of the couplant made it somewhat slow in flowing into the ridges
left by the scrimcloth. Hence, care was taken to allow ample time, or atleast consistent time, for
couplant flow before perforating AU measurements.
Although a number of transducers were utilized in the experimental work conducted, the exper-
imental results presented in this dissertation were obtained using two pairs of Panametrics
piezoelectric transducers. Both pairs are 2.25 Mttz center frequency broadband, heavily damped,
transducers. Figure 24 shows the frequency response of the half inch transducer, obtained by a
pulse echo test on a large aluminum block. Even though the transducer is broadband, there is a
very definite frequency dependent response associated with the transducer. Efforts to try to account
for the frequency dependent response of transducers are covered in reference 10. Figure 23 com-
pares the AU frequency responses obtained on the same specimen using a 5 Mltz and a 2.25 MHz
Trade Mark of Echo Ultrasound, Inc.
84

resonanttransducer,respectively.Notice,thattile5 Mllz transduceractuallycausedmoreenergy
to bepresentin thesecondspecimenresonancc(3.4Mllz) thanthefirst(1.7Mllz). In compar-
ison,the2.25MIlz transducerhadmostof itshighfrequencyenergy in the first specimen resonance
(1.7 Mt[z). Thus, AU results are extremely sensitive to the transducer's frequency response.
The major transducer used to produce the subsequent experimental results was a 2.25 NIl lz (VI05)
broadband transducer with a half inch diameter active element. I[owever, a couple of measure-
ments were made with similar (V166) transducers, containing a quarter inch diameter active cle-
ment. The haft inch di,'uneter transducers were used to measure energy and attenuation, and the
quarter inch transducers were used to measure certain phase velocities and to dclcrmine the cffcct
of source size.
Couplant was applied both to the specimen ,and the transducer bcfore placing them in contact.
Then the transducer and specimen were pressed together with unlformily distributed pressure and
then weights were applied. Two pound weights were uscd to apply pressure to the transducers.
For some experiments, such as phase velocity measurements, the transducers were not weighted and
the transducers were simply pressed by hand and moved slowly over the materi,'d surface. A
Proctor transducer (ref. 155) was used simply to gain an increascd undcrstanding on the effect of
source size.
Data Acquisition
Signal observation and storage was performed using PC-DAS, a data acquisition system marketed
by General Research Corporation to be used with the IBM-PC. PC-DAS utilizes a PCTR-160
A/D board and control software to provide flexible, easy, and high data rate signal capture. The
PCTR-160 allows sampling rates from 156 Ktlz up to 20 Mllz in transient mode mad sampling
rates of 40, 80, and 160 Mltz in the time equivalent sampling mode which can easily be utilized
85

a)
10Amplitude (1E-g}
Unidirectional Gr/Ep
...............................................................................................................................................................................
1.1 MHz
2 L.................. 1.8 MHz ...............................................................................................................................
I f I h 3.6 MHz
0 2 4 6 8 10
Frequency
Amplitude
2.25 MHz transducers
b) Amplitude (1E-O)60
3.6 MHzk._0 .............................................................. ' ...............................................................................................................
40 ...............................................................................................................................................................................
30 .........................................................................................................................................................................
2O
10
O0 2 4 0 8 10
Frequency
Amplitude
5.0 MHz transducers
Figure 23. Comparison of AU signal from a)2.25 and b)5.0, Mllz transducers
86

FREQUENCY RESPONSE OF TRANSDUCER2.25 MHz (.5 inch)
25
2O
15
10
00
Amplitude (1E-10)
2 4 6 8 10
Frequency (MHz)
Amplitude
Figure 24. Frequency response of"I/2 inch (2.25 Mllz) transducer
87

with the AU arrangement. Ilowever for the frequency ranges generated with the AU system and
specimens, the 20 Mllz sampling rate proved to be adequate.
The signal can be displayed so that the whole signal (4096 points) appears on screen or in expanded
form so that a detailed view of l/12th of the signal is displayed. The signal can then be frozen and
a gate wlfich is movable in the display can be used to make exact time mcasurcments, since the
numerical value corresponding to the position of the gate in the lime domain is displayed on screen
to the resolution of tile digital data. Tiffs feature of the data analysis software was used to measure
phase velocities by tracing the exact placement in the time domain of a phase point whcn the
transducers are moved (ie. d is changed). The vMue At was determined by tracing a phase point
on the CRT and Ad by measuring the displacement of the transducer on the specimen, then the
phase velocity was calculated
_'ph= (A_](AO
As mentioned, this gate can also be used to select up to 512 points for spectral analysis which is
displayed on screen, thus giving immediate information on the frequency content in a specific por-
tion of a signal. Again a keyboard controlled marker may be used on screen with screen displayed
numerical values to gain exact information on frequency content. Thus, as experiments are per-
formed quantitative information on both the time domain and frequency domain may be ascer-
tained. Software then allows the digital data and sampling parameters to be stored in a data file for
further analysis.
Software Analysis of A U Signal
In order to obtain more physicaUy sig_fificant signal description parameters, signal analysis software
has been dcveloped. The program used to generate results for this work is a third generation Lahey
88

Fortran version (ref. 131) of the program described in chapter 2. Tiffs program utilizes the same
theory and equations stated in that discussion. This version of the program allows for the calcu-
lation of the same parameters, utilizing the Ilartley transform for faster calculation of amplitudes
of frequency components.
Figure 25 shows a block diagram of data transfer to get various results and the use of batch files to
create data fries in order to show how AU values vary with another parameter (eg. _hnuthal angle).
First, data files must be converted to ASCII folmat, so that data can be read to plotting and mo-
ment analysis software. For purposes of example, let (frie) stand for any group of data fdes created
using PCDAS and (###) stand for the incremented number representing one data file in the set.
If a number of files with the same data name (ie. frie###.dat), but incremented numbers, need to
be converted, thcn a batch file can be created to convert fries. "riffs batch fde can be created using
the Basic software program (conbat.bat). This automatically gives the fde name of the batch fde
the same name as the prefix for the data files and the file type (con). Thus, when the program
(convert.exe) asks for the batch fde: type-(fde.con). Next, batch fries can be created ff_r Fortran fdes
by using the Basic program (forbat.bas). Tiffs yields a batch file named (file.fat). Then another
Fortran program (mitt.exe) can be used to obtain voltage/time data and amplitude/frequency data,
and another Fortran program (rnike2.exe) to obtain AU parameters for all data fries and then store
them in a single file, which can be named by the user. ]'he data files for the voltage/tlme and
amplitude/frequency data is ready for use with standard plotting packages. The output file from
(mike2.exe) can be manipulated by another Fortran program to generate data sets for graphic
packages. For instance, the program (aupa.bas) reads each value for A1, A2, and two filtered A I
parameters, pairs them with the corresponding values of 0 and d to produce a number of data sets.
IIowever, tiffs program can only be used if data is taken in the proper order for the proper angles
(0) and distances (d_. The following data sets are produced:
A1 versus azimuthal angle (at d = 1 and d = 2 inches)
89

Attenuation of A1 versus aT.inmthal angle between 1 and 2 inches
A2 versus azimulhal angle (at d= 1 and d= 2 inches)
Al(fl,_) versus azimuthal angle (at d = I and d= 2 inches)
Attenuation of A l(fl,f2) versus azimuthal angle between I and 2 inches
Al(f3,f4) versus _hnuthal angle (at d= 1 and d= 2 inches)
Attenuation of iX l(f3,f4) versus _imuthal angle between 1 and 2 inches
The fl and t"2 are simply the low and high frequencies for the first filter, while f3 and f4 are the low
and high frequencies, respectively, for the second fdter. These data sets may then be graphed using
plotting routines.
Graphs of these results for a number of plates are included in chapter 4. These results along with
the phase velocity measurements offer a great deal of physical insight on the nature of wave prop-
agalion taking place during the AU method. Additionally, advances in analytical ultrasotfics
(instrumcntation and calculation schemes) may allow angular variations of pertinent AU parame-
ters, such as these, to be obtained quickly, in order to detenrfine increased information on the
condition of composite materials be[tag used in service conditions.
Experiments
Although a myriad of experhnents have been performed in pursuit of a better understanding of the
AU method, discussion will be finfited to a sinlple set of experiments performed to understand and
elucidate the basic mechanics associalcd with the AU method. The experiments involve using
9O

Create V/Tand A/F data flies
(VTAF.EXE)
Obtain AU signal fordifferent azimuthal angle=
(PCDAS)
Create batch filefor CONVERT
(CONBAT.BAS)
Convert data files toASCII format
(CONVERT.BAS)
-5Create batch file
for AUPM.EXE
(FORBAT.BAS)
JFILEOOO.VTD-FILEO##.VTDFILEOOO.AFD-FILEO##.AFD
FILE000.DAT-FILEO##.DAT
FILE.CON
FILEOOO.FMT-FILEO##.FMT
FILE.FAT
Create output fliesof AU parameters
(AUPA.EXE)
V
I FILE.OUT
Make AU versus azimuthal angle files
Figure 25. Diagram of AU data flow to obtain various output
91

aluminum plates and a number of Gr/Ep plates• This experimental work endeavored to systemat-
ically examine the general character of wave propagation occurring when the AU method is per-
formed. These experiments were performed using the experimental arrangement described
previously• The following specimens were utilized:
.0625 inch thick aluminum plate (6061-T6)
•125 inch thick aluminum plate (6061-T6)
An aluminum plate tapered from .0625 section to .125 section (see figure 26) (6061-T6)
24-ply unidirectional Gr/Ep plate (AS-4 Gr/Pr 288)
12-ply unidirectional Gr/Ep plate (AS-4 Gr/Pr 288)
Experiments were performed to produce both qualitative and quantitative information on the AU
method. Some experiments involved performing very mechanized steps to obtain specific meas-
urements, while others involved less rigorous steps. In general, a different set of experiments were
performed for each specimen, however a number of experiments were performed on more than one
specimen. Thus, a description of general experimental procedures is given Rrst and then each
specimen is considered separately, with more detailed descriptions of experiments performed tufty
on that specimen.
General Procedures
The basic quantities measured in this set of experiments are A1, A l(filtered), A2, attenuation, and
estimated phase and group velocities.

]'he measurementof AU parameters and attenuation is quite simple and is the basis of tile AU
method. The standard AU configuration described above was util_ed, with transducers oriented
normal to the plate. Ill order to obtain the attenuation measurements, the AU method was per-
formed at both d = 1 and d = 2 inches. It should be kept in mind that tile attenuation measurement
was done only for material intervals between 1 and 2 inches from the sending transducer in this set
of experiments and is likely to be quite different for another choice of d's, even though their dif-
ference may still be [ inch. For the composite plates, these measurements were made at azimuthal
angles of 0, 15, 30, 45, 60, 75, and 90 degrees. Phase velocity is measured for a single frequency
content to determine tile phase velocity for that particular mode. 'lhis procedure involved simply
tracing the displacement of a phase point (usually a peak in harmonic function of single fiequency),
for a given displacement of transducers on the plate. The measurement of phase velocities was
more difficult than measuring AU parameters and required a more artful experimental teclmique
(trial and error, inorder to fully separate different harmonic modes). In certain cases, the signal
content did not facilitate the measurement of a phase velocity for a particular mode. Specifically,
ill the composite plates , certain frequencies were of such a smaU ampfitude for certain azimuthal
angles that phase velocity measurements were impossible. The measurement of phase velocilies
were again made for different frequency contents at various _imuthal angles, however, in certain
cases, the phase velocities varied from measurement to measurement. Even more difficult was the
measurement of group velocity for a p_ticular mode or frequency content. Often, these values
turned out to be impossible to measure exactly, however, estimates were made to provide qualita-
tive results about AU wave propagation. Estimates of the group velocity entailed defining a mod-
ulating hump for a certain frequency content and noting how far it translated in the time domain
for a change in d. Thus, the measurement of group velocity, simply involves the motion of the
wave modulating term.
The AU parameters and the attenuation measurements were made with the conventional AU
configuration. For all plates, besides the tapered aluminum plate, the sending transducer was placed
at the center of the plate. AU measurements for any dircction were made for d= 1 and d= 2
93

inches.Forthe aluminum plates, tile AU measurement were only performed in one direction. For
the composite platesl fudiciary lines were drawn for azimuthal angles of 0, 15, 30, 45, 60, 75, and
90. These were drawn from the center of the plate, where the sending transducer was positioned.
The receiving transducer was initially placed at 0 = 0 degrees and d = 1 inches. "/'hen, the receiving
transducer was moved to d = 2 inches. Next, the receiving transducer was moved to 0 = 15 degrees
and d = 1 inch. The sending transducer was kept at the same spot (center of the plate), however
it was rotated 15 degrees, as was the receiving transducer. This was done to eliminate any effect
of unsymmetric or misaligned transducer elements. Next, tile receiving transducer was moved to
d= 2 inches. The same procedure was continued, ending with 0 = 90 and d= 2 inches. A1/
measurements were made with the weights on the transducers.
Specific Experiments
This section will simply catalogue the particular experiments performed on each specimen. The
experimental procedures described above will only be referenced and will not be described in detail
again.
Aluminum Plate (.0625 inches thick)
A/uminum plates were utilized to obtain basic information on the nature of wave propagation oc-
curring in plates when the AU method is performed. As a first step, the aluminum plates offered
a more simple situation than the composite material because of the readily available material
properties and their nomiaUy isotropic behavior.
First, a basic AU measurement at one inch was performed to determine the components present
in the signal. Then the procedure to obtain the AU parameters and the attenuation factors was
performed. Phase velocity and group velocity measurements were made for each frequency
94

conponentin thesignalthatwasof sufficientamplitude.A simplepulseechotestwasalsoper-
formedusingthe.25inchdiametersendingtransducer.
Severaladditionalexperimentswereperformedto determinetileeffectof changingcertainvariables.
First,theAU methodwasperfonnedwith thetwo .25inchdiametertransducersto determinethe
effectof transducersize,and,onetestwasperformedwitha 5Mttz setof transducersto determine
theeffectof transducerresonancefrequency.Also, a simple test was performed using the Proctor
transducer. Finally, a test was performed to determine the effect of tilting the sending transducer
slightly. Basically, this was done by applying an extra thick portion of couplant under the sending
transducer and then tilting the transducer to approximately 10 degrees to determine the effect on
the frequency content of the signal. The tilt was oriented away from the receiving transducer (see
figure 26).
Aluminum Plate (.125 inches tMck)
Experiments similar to those performed on the .0625 inch thick plate were performed on a thicker
(. 125 inch thick) plate. These experiments were done in order to determine the effect of specimen
thickness on AU results.
Composite Plate (24-ply unidirectional Gr/Ep)
A number of measurement were made on a 24-ply unidirectional Gr/Ep plate. The composite plate
allowed for the investigation of the effect material variation with azimuthal angle has on AU results.
First, basic AU measurements were made to determine what frequencies were present in the signal.
Next, the procedure for determining AU parameters and attenuation factors was carded out for each
azimuthal angle. Then, the phase velocities of various frequency components were measured for
95

SENDING TRANSDUCER RECEIVING TRANSDUCER
\
SPECIMEN
Figure 26. Experiment to determine the effect oftransrhlcer tilt
96

each _imuthal angle possible; also, group velocities were measured when possible. A basic pulse
echo experiment was also performed. Finally, basic tests were performed to determine the effects
of using .5 inch diarnetcr transducers and 5 Mtlz transducers.
Composite Plate (12-ply unidirectional Gr / Ep)
In order to determine the effect of plate thickness with composite plates, a 12-ply unidirectional
plate of the same material used to make the 24-ply plate was investigated. The same tests were
performed on both the 12-ply plate and the 24-ply plate.
Tapered Aluminum Plate
A tapered aluminum plate (fig.27) was investigated to gain more insight into the physics of how
waves detected with AU measurements are created. This type of experimental work may also be
useful in developing a basic understanding of the AU method applied to complex structures.
First, AU signals were generated in each of the flat portions of the plate, well away from the tapered
region. This was done to determine what frequencies were being generated in each region. Next,
the sending transducer was placed in the .0625 inch thick section, an inch from the taper, and the
receiving transducer was placed in the. 125 inch thick section, 6 inches from the sending transducer.
An AU signal was then captured in this configuration. Next, the same procedure was performed
with the sending transducer in the. 125 thick section and the receiving transducer in the .0625 inch
thick section.
97

TAPERED ALUMINUM PLATE DESIGN
L.125 "
Each section of the plate Is 4 Inches
The plate is 12 Inches wide
Figure 27. Design of tapered aluminum plate
98

Experimental Results
The experimental procedure described in the previous chapter revealed definite trends and a number
of results useful for underst_mding the AU method, This chapter will prescnt these results.
General Comments
AU signals generated in this set of experiments showed wavetrains with components at very definite
frequencies for a given plate. Observing the amplitude/frequency curves generated by these exper-
iments illustrates this with sharp peaks at definite frequencies (e.g. see figure 38). Furthermore,
these components are separable in the wavetrain by separating the tr:msducers furthcr aparl, as a
result of dispersion. This results in harmonic components which show very definite peaks and
troughs (harmonic behavior) and wlfich translate across the time domain if the receiving transducer
is translated relative the sending transducer. Ilowever, in some instances the amplitude of a given
phase point will change quickly due to a small change in distance, tiffs is thought to be an effect
of a slow group velocity modulation. Figure 28 shows an AU signal obtained with the transducers
on a composite plate and d = 1.0 inches.. Notice that there seems to be a periodic modulation of
99

thesignal.Figure 29 shows a signal obtained from the same plate with d = 2.0 inches. Tiffs shows
how tile modulation and phase points shift. This can make the measurement of phase velocity
morc tricky. Additionally, notice that the shape of the modulation changes.
Basically, results indicate that frequency components are present in the signal, that they separate in
the time domain when the transducers are separated, and that phase points can in some instances
be pickcd out to make phase velocity measurements. It is observed that some phase velocity
(motion in the time domain for motion in the spatial domain) is associated with these motions and
that, as mentioned, for certain modes, a group velocity is modulating the harmonic componcnts.
For the composite plates, it is evident that the same frequencies are present at all azhnuthal angles,
but that the proportions of each frequency content changes drastically with _imuthal angle. In
fact, for some azimuthal angles, certain frequency components were of such small magnitude that
velocity measurements were not possible. Furthermore, it is quitc obvious that the energy content
in the signal is heavily influenced by changes in azimuthal angle, as is the position of certain com-
ponents of the wave train in the tinae domain. In order to quantify the change of wave motion
with azimuthal angle on composite plates, the behavior of AU parameters and wave velocities of
a certain harmonic component of the signal were monitored as a function of azimuthal angle.
Aluminum Plate (.0625 inches thick)
The signals and correspondhlg spectrums generated by performing the AU method on the .0625
inch thick aluminum plate at d = 1 and d = 2 inches are shown in figs. 30 and 31. Figure 32 shows
an expanded view of the early portion of the signal obtained by performing the AU with d = I inch.
From this plot it is evident that certain phase points may be identified for a given harmonic com-
ponent in the signal.
Notice that the major components in the signal were at .7, 1.0, and 2.0 Mtlz. The very early part
of the signal consisted of a small amplitude .7 Mltz signal content. This part of the signal was of
I00

I---Io>v
IU
<I'-.JO
I I
O. 00005 0. O0010
TIME ($EC$.)
0.00015
Figure 28. AU signal obtained from Gr/Ep specimen (d= I inch)
101

¢0l-
O>
nl
I--_lO>
-0.8
-0.9
-I.o0.00000
I I
0.00005 0.00010
TIME (SEC8.)
0.00015
Figure 29. AU signal obtained from Gr/Ep specimen (d= 2 inch)
102

a)
b)3.8E-08
3. ?E-O8
3. SE-O8
3,5E-Oe
3.qE-O8
3.3E-Q8
3. _E-QB
3. IE-O8
3.0E-08
2.9E-OB
Z,BE-O8
2.7E-08
2.6E-08
2.5E-08
2._4E-Q8
2.3E -oe -
IU Z.ZE-08 -t'_ E, IE-08 -
_F.. 2,0E'08"1.9E°08 -
1.8E-08-I. 7E -08.
1.6E-08
1.5E-08 -
) .qE-O8
I•3E -Q8.
Z,EE-O8
I. IE-08
I .(]E-08
g. OE-09
8, OE-09
7, OE-09
6. OE-og
5.0E-09
q,0E-09
3,0E-09
2.OE-Q9
].OE-093.9E-16
O. 00005 O. O0010 O, 000 tS
TIME ($EC8.)
3 q 5 6 7 6 9 tO
FREQUENCY (MHZ
Figure 30. a)V/T and b)A/F, plots for aluminum plate (d = 1") (.0625" thick)
103

a)
0.00_05 0,00010
TIME (BEGS.)
.OOO
b)
l.ol-u
_ 11,ol-oe
,.s_.ov) MHz
Figure 31. a)V/T and b)A/F, plots for aluminum plate (d = 2") (.0625" thick)
104

0.8VOLTAGE
V()LT, 3E/rIMEALUMINUM
0.4
0.2
0
-0.2
-0.4
-0.00
1........|
I I I
2 4 0
_ m
I
j ....
I I I
8 10 12 14
TIME (1E-6)
VOLTAGE
Figure 32. Expanded view of portion of voltage/tlme plot
105

very short duration (5 psecs.), which is on tile order of the pulse duration. Additionally, the .7
Mllz portion of the signal was of relatively low amplitude. The following paris of the signal con-
sists of the 1 and 2 Mllz components. These portions of the signal were of considerably higher
amplitude and persisted much longer in the wave train. In tigures 30 and 31, the large conlribution
of the 1 and 2 MIIz components is evidenced by the large amplitude peaks. Thus, the frequency
spectrum shows larger peaks at 1 and 2 MIIz and the resulting energy content or filtered AU pa-
rameters are larger. In comparing the .7 Mllz component to the 1 and 2 Mllz components, see
(fig. 30 and fig. 31 (chp. 4)), it should be noted that the 2 MIIz showed a large sharp modulation
hump that travelled at a much slower velocity than phase points, compared to the 1 MIIz wlfich
did not show as definite of a modulation hump and the .7 Mllz which showed no dispersive effects.
Another point to be noted is that the 2 blllz signal content dominated the end portion of the wave
train, indicating a slow group velocity. Note, also that the 1 MIIz peak in the amplitude/frequency
is of a wider frequency band and is skewed to the right. A modest indication in the spectrum also
appears at 2.3 Mtlz. l:igure 33 shows the relative energy content in each of the frequency ranges
for the signal at d = 1 mad d = 2 inches. This figure also shows the attenuation of each mode be-
tween 1 and 2 inches. The 2 and the 1 MIIz components of the signal were of fairly comparable
amplitude at 1 inch, but the 2 MIIz component was significantly more attenuated than the 1 Mllz
content. One problem with these measurements is that the long wavetrain associated with the sig-
nal was longer than the data recording capabilities of the system and the end part of the wavetrain
interacted with edge reflections. The .7 Mllz portion of the signal separated from the rest of the
wave train (due to higher group velocity) and appeared Jess attenuated.
Finally, figure 37 displays a chart of the phase velocity for each frequency component of wave
motion. Phase velocity measurements were not possible for the 2.3 Mltz signal content because
these components never really separated from the other frequency components which were of
higher ampfitude. Notice that the 2 and 1 Mllz components had substantiaUy higher phase ve-
locities than the .7 Mllz component. It should be noted that the phase velocity for the 1 Mllz
component was found to be slightly greater at the end of the signal than at the beginning. In gen-
106

AU PARAMETERS
.0625 inch thick aluminum plate
VARIABLE1
INCH
2
INCH
flIT
A 1 ._6E-1 .4gE-2 31
A2 .zs .59 .76
A 1(.5,. 8 ) ._3E-3 68E-4 .52
A1(.8,1.2) 72E-2 40E-2 S6
A1(1.8,2.2) 8_E-2 .83E-3 ._0
2 INCH
1 INCHI
Figure 33. AU parameters for .0625 inch thick aluminum plate
107

eral, phase velocities showed variation as a function of position in the wavetrain. Measurements
were made on the earliest part of the wavetrain, where the mode on which the phase velocity was
being made, was separated from other modes enough, so that definite phase points for that mode
could be traced.
Group velocity measurements were difficult to make for the aluminum plate. [I0wever, it was
noted that the .7 MHz signal content moved at a group vclocity similar to its phase velocity. In
contrast, it was esthnated that the 1 Mttz signal content had a group velocity of roughly 60,000
inches per sec. and that the 2 MHz signal content was roughly 65,000 inches per sec., however the
end portion of the signal was dominated by a 2 MHz signal content of a slow group velocity. It
should be noted that these measurements were made for components of the signal early in the
wavetrain. Moreover, another point of interest is the rather large value of the measured phase ve-
locity compared to the rather small value of estimated group velocity for the 1 and 2 MIIz com-
ponents. In general, the 2 MHz signal content showed a greater phase velocity than the 1 Mltz,
but contained a slow group velocity portion at the end of the wavetrain.
Tilting the sending transducer, so that its face was not parallel to the face of the plate, resulted in
an increase in the value of the frequencies for the peaks in the spectrum. Additionally, changing
the transducer size from .5 to .25 inches in diameter had little effect on the 1, 2, and 2.3 Mltz
components, but caused the .7 MHz (early arriving part of the wavetrain) to change to .5 MIIz.
Lastly, the Proctor transducer also caused peaks in the spectrum from the signal to occur at 1,2,
and 2.3 MHz. Thus these frequencies are excited by a number of different transducers.
Aluminum (.125 inches thick)
Figure 35 shows the voltage/time and amplitude/frequency plots for the. 125 inch thick plate. The
signal content consisted of .35, .5, 1.0 and 1.15 M IIz components.
108

PHASE VELOCITY MEASUREMENTS
.0625 inch thick aluminum plate
FREQUENCY
.7 MHz
1.0 MHz
2.0 MHz
PHASE
VELOCITY
210,000
620,000
1,000,000 +
Phase velocity measurements are in (inches per second)
Figure 34. Phase velocity measurements for .0625 inch thick aluminum plate
109

a)0.5-
o,q_
0,_
0,2
0.1 ¸
-0.0 ¸
_-0,2v
_-0.3
-O.q
-0,5
-0,6
-0. ?
-0.8
-0,9.
-I.0
0,00000 0,0_005 0.00010 O.OOOl$
TIME (8E08.)
b) i,$E-07
I,qz-o?
|.$E-07
1.2E-O?
1,1E-07
|,O[-Q7
I.O[-O8
mO
O.0(-0O
5
I.OE-O8.
5.0E-08,
_.0E-O8
3.0E-08
Z.OE-O8
L.OE-08
I.OE-I?2 3 tl $ 6 7 § 9
FRE_SNCY MHz
Figure 35. a)Vfr and b)A/F, plots for .125" thick aluminum plate
110

In general, the signal consisted of a spectrum with major peaks at frequency values half that of the
.0625 inch thick plate. In fact, the signal was very similar to that of the signal obtained on the .0625
inch thick plate, except that the frequency of each mode identified in the signature was half. The
comparison of the AU values for these components can be seen in figure 36. Notice that the 1
Mllz component is tile highest energy content part of the signal for d = 1 inch and is the most
heavily attenuated part of the signal. In fact, the 1 Mltz signal content is roughly twice as atten-
uated as the .5 Mtlz signal content.
Figure 37 displays the values of the phase velocities for the. 125 inch thick plate. The phase velocity
for the 1 Mllz mode on .125 inch thick plate is the same as the 2 Mltz mode on the .0625 inch
thick plate, and so foIth for the other modes. Thus, it appears that phase velocities were similar
on the . 125 inch plate and the .0625 inch plate.
Group velocity measurements were much less than the phase velocity measurements for the .5 and
1.0 Mllz components, a result that is similar to that obtained for the .0625 inch thick plate.
24 Ply Gr/Ep Plate (Unidirectional)
Although a number of frequency components existed in the 24-ply plate, the dominant frequency
components present at each azhnuthal angle where at .23, .66, and 1.1 Mltz. Each of these com-
ponents varied in a unique manner with azimuthal angle. Figure 38 shows a representative signal
and amplitude/frequency plot obtained with d = 1 inches and an azimuthal angle of 0 degrees.
This signal is verb" representative of the signal in the zero degree direction for Gr/Ep plates. The
signal shows a definite high ampfitude part of the signal at an early arrival time (predominately .66
Mttz), followed by a small portion of predominately 1.1 MIIz signal content, and a late part of the
signal dominated by .23 MHz signal content. Each of these frequency peaks is labeled in the
amplitude/frequency plot (also in figure 38). The amplitude/frequency plot shows that higher Ire-
111

AU PARAMETERS
.125 inch thick aluminum plate
VARIABLE1
INCH
2
INCH
II
2 INCH
1 INCHII
A1 .12E-1 .55E-2 .45
A2 .5o .41 .82
A1(.3,.4) .19E-3 .18E-3 .95
A1(.4,.6) .16E-2 .14E-2 .88
A1(.8,1.2) .81E-2 .32E-2 .40
Figure 36. AU parameters for .125 inch thick aluminum plate
112

PHASE VELOCITY MEASUREMENTS
.126 inch thick aluminum plate
FREQUENCY
.36 MHz
.60 MHz
1.0 MHz
PHASE
VELOCITY
2 16,000
620,000
1,600,000 *
Phase velocity measurements are In (inches per second)
Figure 37. Phase velocities for .125 inch thick aluminum plate
113

a) 0.5.
0.3,
0.2.
0.1
-0.0
-0, i -
P
_ -G.3 -
-0.4 •
-0.5 •
-0.6
-0.7
-O.d
-8,9
-I.0
0.0C_I'_ I_ O. _qnO_ O. 000 ! O 0,0001
TIME
b) 1,3E-07
1.2E-O'/
t. IE-Q7
I. OE-07
9.0E-OB -
B, OE-O8
_ 7.OE-OB
I--
_ 6,0E-OB
5.0E-08
4, OF.-08
3.0E-r)5 i
1
I 0£ ::_
2 3 4 _ 6 7 8 g 10
FREQUENCY MHz
Figure 38. a)V/T and b)A/F, plots for Gr/Ep plate (24-ply, unldirirectional)
114

qucncy peaks were in the sigmal for the 0 degree dkcction and d = I inch, but most other meas-
urements do not show these fi'cquency peaks.
The signal obtahled at d-- 2 inches showed the same signal content, but the early portion of tile
signal was greatly distorted. At 15 degrees tile I. I Mllz signal conlent was of higher relative mag-
nitude compared to the other components than at other azimuthal angles. "Ibis type of behavior
has been seen in previous results (refs. 9 and 99). Moving the transducer to d = 2 inches at 15 de-
grees resulted in a great deal of attenuation in the AU signal. As the azimuthal angle was increased,
the .23 Mllz sigjml content began to dominate the sigtml. In fact, at higher angles the other com-
ponents became very hard and in some cases impossible to pick out of the signal. The effect of d
and azimuthal angle on AU results can bc seen in figures 39-45.
The plots of AI and the attenuatio,l of AI versus azimuthal angle (figure 39) shows how the energy
content and attcaualion were affected by changes in azimuthal angle. Notice the AU signal was
of high energy for 0 degrees and dropped off to a fairly constant value. Tiffs behavior is very similar
to that shown for the Gr/Ep unidirectionM shown in chapter 2 (fig. 13). Additionally, the highest
attenuatkm of the AU siga_al was at 15 and 90 degrees.
The plot of A2 versus azimuthal angle (figmre 40) shows that the high frequency content of the
signal drops off at rouglfly 45 deg4ees to a value ahnost half that seen at carly an,riles. This is due
to the .23 Mllz signal content becoming more dominant than the higher frequency content for
higher angles.
For the .23 Mllz si_ml content, A1(.15,.32) and AI(.15,.32)-ATTEN. were plotted versus
azimuthal ailgle (figure 41). For d= 1 inches the A1(.15,.32) is slightly high hi the 0 degree direc-
tion and veB' high for 90 degrees. In fact, the AU sigaml ha the 90 degree direction showed an al-
most perfect sine wave pattern at .23 Mllz throughout the wave train, with very little modulation
(see figure 42). lleavy attenuation of the .23 Mllz signal content occurred at 90 degrees and as a
115

a) A1 VERSUS AZIMUTHAL ANGLEGR\EP 24 PLIES
A1(1 INCH] A1(2 INCH}
001
0.005
0.O1
0.005
-0.005 = a i L -0.0050 20 40 60 80 IO0
ANGLE
I --=-- AI [I INCH) "O'AI(2INCH) I
b) A1 ATTENUATION VERSUS AZIMUTHAL ANGLE24-PLY UNIDIRECTIONAL PANEL
A1-ATT.50
40
80
20
t0
00
I A ,: I I
20 40 00 80 lOgAZIMUTHAL ANGLE
A1-ATT.
Figure 39. a)Al and b)AI-ATTEN, versus azimuthal angle for Gr/Ep plate
116

A_ VERSUS ANGLEGR/EP 24-PLY
A2(1 INCH) (Thousands)7OO
6OO
500 _
4OO
3OO
2OO
100
00
A2(2 INCH) (Thousands
r . _ ,
I I I
20 40 60
ANGLE
+ A2(1 INCH) --_- A2(2 INCH)
. l
8O
700
6OO
5OO
400
3O0
200
100
0100
Figure 40. A2 versus azimuthal angle for Gr/Ep plate
117

result the A1(.15,.32) for d= 2 inches is rather flat and does not curve back up as does the curve
for d= 1 inches.
Figure 43 shows how AI(.55,.75) for d= 1 and d= 2 inches and AI(.55,.75)-ATTEN. vary with
azimuthal angle. At low angles A1(.55,.75) varies much like AI, since the .66 Mllz content dom-
inated the signal. Ilowever, at high angles the .66 Mllz signal conlent was not very strong and
hence A1(.55,.75) fell to practically zero. The attenuation for A1(.55,.75) was relatively low for 0
degrees, pcakcd at 15 degrees, and reached an intermediate value at higher angles.
AI(.9,1.3) for d= 1 and d= 2 inches, along with the calculated attenuation parameter versus
azimuthal angle are shown in figure 44. The A1(.9,1.3) for d= I inch shows a hi,,_a value at 0 de-
grees and drops off less slowly at 15 degrees compared to A1(.55,.75), but then falls off at 30 degrees.
The 1.1 MIIz signal content or A1(.9,1.3) was attenuated very little in the 0 degree direction, but
showed high attenuation between 15 and 30 degrees.
Plots demonstrating how phase velocities varied with azimuthal angle are displayed in figure 45.
The first plot (a) shows the variation of phase velocity for the .23 Mltz signal content with
azimuthal angle. The .23 Mllz signal content had a phase velocity which varied fairly smoothly
from a value of 277,000 inches per second at 0 degrees to 156,000 inches per second at 90 degrees.
The .66 Mllz signal content showed a value of 450,000 inches per second for the phase velocity at
0 degrees and dropped to 113,000 at 90 degrees, showhag a quick drop off between 15 and 30 de-
grees. The 1.1 Milz signal content had a phase velocity of 800,000 inches per second at 0 degrees
and a phase velocity of 700,000 inches per second at 15 degrees, but was of such low amplitude at
higher angles that phase velocity measurements were not possible. Notice that the phase velocities
for the 1.1 Mllz signal content is roughly twice that of the phase velocity for the .66 Mltz (half the
frequency value) signal content. Tiffs same type of behavior was observed for the aluminum plates.
In general, the 24-ply composite plate produced signals with frequency content at .27, .66, and 1.I
Mllz. However, the AU signal did possess signal content in other frequency ranges. In fact, the
118

a) A1(.15,.32) VERSUS ANGLE24 PLY GR/EP
A1(.15,.32)-1'O001
1.000E - 03
8.000E-04
6.000E -04
4000E -04
2,000E-04
00
A1(.15,.32)-2"0.001
-._ . ° ° ,,.o-....
20 40 60 80ANGLE
I "-_'.-- -1 INCH - .o- - -2 INCH I
1.00OE-03
8.000E - 04
O.000E-04
4,000E-04
2. O00E - 04
0100
b) Al(.15,.32)-ATTENUATION VERSUS ANGLE24-PLY UNIDIRECTIONAL
A1(AS.32)-ATT,30
2O
15
10
5
0 i , , i i i
0 20 40 O0 BO 100ANGLE
_ A1(.15..32)-ATT. J
F;gure 41. A!(.15,.32) versus azimuthal angle for Gr/Ep plate
119

0"03 1
0.02'i
1
0.01
W0
I-- -0.00--I0
-0.01
-0.02
-0.03 _
O. 00000 0.001)135 O. 013010
TIME
0.00015
Figure 42. V/T plot for Gr/Ep plate in 90 degree direction
120

a) A1(.55,.75) VERSUS ANGLE24-P LY GR/IE P
A1(.55,.75)0.000
0,005
0.0O4
0.003
0.002
0.001
00 2O
J ., j
40 OOANGLE
I _t_ 1 INCH --o-- 2 INCH
80
b) Al(.55,.75)-ATTENUATION VERSUS ANGLE24-PLY UNIDIRECTIONAL
12o il100
80
O0
40
20
0
0 20 40 80 80 IO0ANGLE
I _ A1[.55,.75)-ATT.
Figure 43. A1(.55,.75) versus azimuthal angle for Gr/Ep plate
121

a)
AI(0.1.1) HE-4)
A1(.9,1.3) VERSUS ANGLE24-PLY OR/EP
35
25
15
1o
5
oo
b) AI(.9,1.3)-ATTENUATION VERSUS ANGLE24-PLY GR/EP
AI(.g.I,3)-ATTEN,80
GO .........................................................................................................................................
40 ..................................................................................................
20 ....
O0 20 40 80 80
ANGLE
[ -- AI(.O.I,3)-ATTEN. I
IO0
Figure 44. A!(.9,1.3) versus azimuthal angle for Gr/Ep plate
122

a) PHASE VELOCITY VERSUS ANGLE24-PLY GR/EP
(.65.76) MHz trequency range
PHASE VELOCITY {Thousands)50O
400
3O0
2OO
100
OO
(.5S,.75)
t I I I
20 40 60 80ANGLE
_ PHASE VELOCITY J
100
b) PHASE VELOCITY VERSUS ANGLE24-PLY GR/EP
(.15,.32) MHz frequency range
PHASE VELOCITY (Thousands)300:
250
20O
150
100
50
0I I I I
b15,.32}
0 20 40 O0 80 100ANGLE
I -- PHASE VELOCITY J
Fig,re 45. Phase velocity versus azimuthal angle, a).66 b).27 Mtlz content
123

AU signals from the composite plate resulted in more peaks and wider band widths for those peaks,
compared to the aluminum plate. The AU signals from the composite plate, except for the 0 degree
direction, did not show the strong modulated pulse shape that was observed for the AU signals
obtained from the aluminum plates.
12 Ply Gr/Ep Plate (Unidirectional)
The 12-ply unidirectional specimen produced AU results with the predominant frequency content
at .46, 1.2, and 2.2 Mttz. Note these values are twice that seen on the 24-ply specimen, llence,
the composite plates showed the same inverse dependence of frequency on thickness as the alumi-
num plate, as would be expected with plate modes of wave propagation. Each of the frequency
components for the 12-ply plate showed similar behavior to the corresponding frequency compo-
nent on the 24-ply plate, with some slight exceptions. In order to glean more exact information
on how the AU signal varied with azimuthal angle, figures 46-51 show how AU parameters varied
with azimuthal angle on the 12-ply plate.
The plot of AI versus azimuthal angle for the 12-ply laminate is shown in figure 46. Again the
AU signal showed the greatest energy content in the 0 degree direction with the signal dropping off
quicker for d = 2 inches than for d = 1 inch. Also, the A1 value jumped to a rather a high value
for d = 1 inch at 90 degrees. This jump in A 1 at 90 degrees was even more rapid than what was
seen in the 24-ply plate. There are probably a number of factors contributing to the jump in the
energy of this mode at 90 degrees. It should also be noted that the attenuation was greatest at be-
tween 15 and 30 degrees and at 90 degrees.
Figure 47 displays the plots of A2 versus azimuthal angle. For d = 1 inch, the plot showed a peak
at 15 degrees. This type of behavior is similar to that seen in the thin plates discussed in chapter
2 (figure 16).
124

A1 VERSUS AZIMUTHAL ANGLE12 PLY UNIDIRECTIONAL
A1 (1 INCH}
o.oos iAI (2 INCH)
0,004
0.003
O. 002
0.001
0
0.005
20 40 80 80AZIMUTHAL ANGLE
[ "-I_ A1 11 INCH) "'o'" A1(2 INCH) ]
0.004
0.003
0.002
0.001
100
Figure 46. A1 versus azimuthal angle for 12-ply Gr/Ep plate
125

A2 VERSUS AZIMUTHAL ANGLE12-PLY UNIDIRECTIONAL
A2 (1 INCH) (Thousands) A2 (2 INCH) (Thousands)700
000 .................................................................................................................
500'400 _k ................................................................................................................................................................. "?, _........... = =_ ....... _1_, __..................................=1o-.............
300 "_" .... "-,o .....
200 ........................................................................T ..............:..... _...............................................................
1OO
00
700
000
5OO
400
3OO
2OO
.......................................................................................................................................................................100
i i t t O
20 40 00 BO 100AZIMUTHAL ANGLE
I _A2 (1 INCH) -_-A2 (2 INCH) J
I J
Figure 47. A2 versus azimuthal angle for Gr/Ep plate
126

The plots of A1(.25,.7) and Al(.25,.7)-Atten. (figure 48) show how the energy of the .46 Mltz
signal content varied with azimuthal angle for d = 1 inch and d = 2 inches. For d = 1 inch, the
A1(.25,.7) parameter showed a definite high value at 90 degrees.
also existed at 0 degrees for both d= 1 inch and d= 2 inches.
signal content was very low for low azimuthal angles.
Fairly high values of A1(.25,.7)
The attenuation of the .46 Mtlz
Tile variation of tile 1.2 MHz signal content with azimuthal angle and distance can be seen in figure
49. This signal content showed a high energy content at low azimuthal angles and reached a very
low value after 45 degrees. The maximum attenuation was between 15 and 30 degrees. This shows
that most of the energy for the 1.2 Mttz signal content is sent in the fiber direction and very little
is sent in the cross fiber direction.
Figure 50 displays plots which show how the 2.1 Mttz signal content is affected by changes in
azimuthal angle and d. The major point is that the 2.1 Mltz signal content is heavily directed into
the low angle directions and seems to attenuate rather quickly even in the low angle directions.
Figure 51 displays the variation of phase velocity for the two dominant modes in the AU signal.
"Ihe plot of phase velocity versus azimuthal angle for the .47 MIIz signal content' descended
smoothly from a value of 385,000 inches per second to a value of 156,000 inches per second. The
plot for the 1.3 Mllz signal content dropped from a very high value of 2,000,0000 inches per second
to a value of 120,000 inches per second inside of 45 degrees. Phase velocity measurements for the
1.3 MtIz signal content were hard to make past 45 degrees because the signal was of such low
anaplitude at these angles. The 2.1 Mtlz signal content showed an extremely high phase velocity
in the 0 degree direction and measurements were not possible at higher angles.
127

a) A1(.25,.7) VERSUS ANGLE12-PLY UNIDIRECTIONAL
A1(.25,,7) (1E-4)8O
15
10
00 20 40 60 8O
ANGLE
[ --,t,- A1{.25,.7)-1 INCH - "o"" A1(.25,.7) -2 'NCH ]
,O02
_.001
hO00E -03
&O00E-04
0
100
b) A1(.25,.7)-ATTENUATION VERSUS ANGLE12-PLY UNIDIRECTIONAL
Al(.25.,7)-ATT.200
150
100
5O
00
..... i i i
20 40 O0 80 100ANGLE
-- A1(25,,7)-ATT,
Figure 48. A1(.25,.7) versus azimuthal angle for Gr/Ep plate
128

a) A1(1.0,1.5) VERSUS ANGLE
12-PLY UNIDIRECTIONAL
A1(1 0,1 5} (1E-4)35
2O
15
10
5
D-_0
o 20 40 00 80 100ANGLE
.-w(-- A1(1.0,1,5)-I INCH ..o-- A1{1,0,15)-2 INCH I
b) AI(1.0,1.5)-ATTENUATION VERSUS ANGLE12-PLY UNIDIRECTIONAL
AI(1.0,1.5)-ATT,
250
200
150
t00
50
0 i
o 20 40 OO B0 100ANGLE
AI(1.0,1.5)-ATT,
Figure 49. Al(I.0,1.5) versus azimuthal angle for Gr/Ep plate
129

a) A1(1.8,2.3) VERSUS ANGLE12-PLY GRIEP
A1{18,23) (1E-5)5O
40
30
2O
10
0
iiiiiiii'iiI¸¸¸20 4O O0 80 100
ANGLE
I _ 1 INCH -'c'- 2 INCH
b) AI(1.8,2.3)-ATTENUATION VERSUS ANGLE12-PLY GR/EP
AI(1B,2,3)-AT TEN.600
500 ..............................................................................................................................................................
00 20 40 60 80 100
ANGLE
AI(1,8,2.3}-ATTEN,
Figure 50. A1(1.8,2.3) versus azimuthal angle for Gr/Ep plate
130

a) PHASE VELOCITY VERSUS ANGLE12-PLY GR/EP
PHASE VELOCITY {Thousands)2500
2000
1500
1000
500
(10,t51
00
l i
20 40ANGLE
i t .
O0 80 100
-- PHASE VELOCITY
b) PHASE VELOCITY VERSUS ANGLE12-PLY GR/EP
PHASE VELOCITY (Thoussnds)400
300 __
200
100
0 I I
0 20 40ANGLE
i i
O0 80
PHASE VELOCITY
(.3&.eo)
lOO
Figure 51. Phase velocity versus azimuthal angle, a)l.3 b).47 Mlh content
t31

Tapered Alumbmm Plate
AU measurements performed on the tapered aluminum plate revealed some interesting results.
Figures 52-55 display amplitude/frequency plots obtained from the various measurements on tile
tapered plate. Again these measurements where made with a large transducer separation distance
(d = 6 inches) and hence show results somewhat different than seen in earlier results (d = 1 and
d = 2 inches).
I'erforming the AU technique on the thick (. 125 inch thick) section with d = 6 inches revealed the
amplitudeJfrequency plot shown in figure 52. Note that the primary peak is at .5 Mttz with another
major peak at 1.0 MIIz. These are the same major frequency components seen in the .125 inch
thick alumhmm plate discussed previously, tlowever, this spectrum does not possess as sharp or
as well defined peaks and additionally contains other smaU peaks at other frequencies. These effccts
are attributed to the extra distance between the sending and receiving transducers.
Figure 53 pictures the ampfitude/frequency plot obtained by placing the sending transducer on the
.125 inch section and the receiving transducer 6 inches away on the .0625 inch thick section. The
major result here is that the .5 Mtlz signal content is replaced by the 1.0 MIIz signal content as the
dominant frequency content and the appearance of the 2 Mttz signal content at a magnitude higher
than what existed when the AU measurement was performed in just the. 125 inch thick section.
Performing the AU method in the .0625 inch section revealed the amplitude�frequency plot in figure
54. Tltis measurement resulted in a sharp peak at 1 MIIz and very little other signal content in
other frequency ranges.
Finally, the AU measurement made with the sending transducer in the .0625 inch thick section and
the receiving transducer 6 inches away in the .125 inch thick section produced the
amplitude/frequency plot shown in figure 55. This plot reveals a strong 1 Mttz peak and higher
proportional values for .3, .5, and 2 MItz peaks, especially, the .3 MHz peak, which was also of a
132

2.9E-07 .
IU0DI-
-Ia._c<
2.8E-07
2.7E-07
2.6E-07
2.5E-07
2.qE-07
2.3E-07
2.2E-07
2. IE-07
2.0E-07
1.9E-07
1.8E-07
I. 7E-07
1 .5E -07
1.5E-07
I.LIE-07
I. 3E-07
1.2E-07
]. IE-07
1.0E-07
9.0E-08
8.0E-GB
7. oE - 08
6.0E-0a
5.hE-09 ]
4.0E-08__
3, 0£"- 0_
2.0E-08
i. GE'- 08 _ I
3.£E-15 ,
0 ; 2 3 4 5 L_ 7 8 9 t 0
I=REOUENOY MHz
Figure 52. Amplitude/frequency (tapered aluminum plate) (.125 " section)
133

I. rE-07
I.OE-07
9.0E-08
8.0E-08
7.0E-08
W
6.0,9_ -ca
I'-
--I
_" 5. OE -08
1
q.OE-08
:3.0E-08
2,0E-08
i.OE-08
3.5E-t6
0 1 2 3 q 5 5 7
FREQUENCYMHzIo
Figure 53. Amplitude/frequency (tapered plate) (.125 "-.0625" section)
134

6.0E-07
gI_'_3.0E-07
2.0E-07
i.OE-07
t.2E-i5 ,,,' ; I I I I I
2 3 q 5 6 7 8
FREQUENCY MHz10
Figure 54. Amplltude/frequency (tapered aluminum plate) (.0625 " section)
135

relatively high value for tile case where the sender and receiver are in reverse locations (figure 26).
A major point is the .5 Mllz signal contcnt not present in the AU mcasurcment for the ttfin section.
Overview of Experimental Data
]'he preceding results exempfify many of the basic features associated with the physics of the AU
technique. In particular, information has been presented on disturbance frequency content and on
wave velocities and energy content for various frequency components. Moreover, the issue of how
these variables are affectcd by changes in azimuthal ang/e has been displayed. Additiona//y, _he
attenuation of the various frequency components for various measurements have been calculated
to help understand the basic mechanics of AU wave propagation.
In tile next chapter, the results from this chapter are compared to basic theoretical ideas that form
an elementary model of the AU method. This will include comparing frequency peaks seen in the
amplitude/frequency plots to frequencies for through-thickness-transverse resonance modes. Ad-
ditionally, this includes looking at plate wave dispersion curves and predicted plate wave phase ve-
locities. Plots of how variables change with _inluthal angle will also be compared with theoretical
predictions of how certain measurements should change with azimuthal angle. Comparisons are
both quantitative (based on numerical results) and qualitative (based on examining equations and
general trends).
136

8.0E-08.
7.0E-08
6.0E-06
5.0E-08
UJ
--q. OE-O8,.I
_E<
3.0E-08
2.0E-08
I.OE-CQ i
5.3E-16 _
0 2I I l I I
3 4 5 8 7
FREQUENCY MHz8
I ,
9
Figure 55. Amplitude/frequency (tapered plate) (.0625 "-.125 " section)
137

Physical Understanding
In lifts chapter a physical understanding of the AU method, based on comparing experimental data
with theory, is presented. Most of tile experimental data utilized is contained in the previous
chapter, however some comments relate to the literature review.
Theory of elasticity, I.ainb wave theory, and TTTR provide tile basis for the physical understanding
of the AU technique. Additionally, the contribution of energy flux deviation to AU results is noted.
I_amb wave theory and TTTR were both reviewed in chapter two, therefore comments in these
subject areas concentrate on utilization of the thcoD" for computer applications, as well as com-
parisons to At; experiments. Specifically, dispersion curves and "l"lqR calculations are used to
suggest which modes may be present at frequcncies seen in the AU results, while phase velocity
calculations are used to idenlify which of the possible modes is actually showing up in AU results.
The elasticity solution is used simply to give an indication of what disturbances the piezoelectric
source might create. Thus, coverage of the elasticity solution consists of general equations, com-
puter results, and ramifications of how the elasticity solution may relate to AU results.
First, a very basic description of the physical problem is presented. This reiterates how a number
of concepts forwarded in chapter 2 are related to llae AU mclhod. The discussion emphasizes how
elasticity, I,amb wave thcor3,, and TTTR may be used to provide a basic understanding of AU re-
138

suits. Next,eachof thethreebasicconcepts(elasticity,TTTR, andLambwavetheory)usedto
understandtileAU methodarecoveredseparatcly.Foreachsubject,this entails the h)llowlng four
steps:
Statement of the basic physical concepts and equations
l)iscussion of computer codes or solution teclmique
Presentation of tile numerical results for material systems utilized in experhnental results
Comparison of numerical results with experimental results
Finally, a general overview of the physical understanding of the AU method is forwarded. This
will include statements on other experimental results and qualitative comments on theory.
Physical Pt'oblem
A number of mechanical and electrical components affect the final AU signal used to characterize
a section of material. Understanding each of these components creates separate engineering prob-
lems, which may be solved using analysis of varying degrees of complexity. These problems arise
from such concerns as:
Characteristics of the pulse sent from the pulser
Transducer response to pulse (mechanical and electrical coupling)
Variation of response over transducer face
139

Interactionof transducerdisturbancewithcouplantandmaterialsurface
Basicmechanicalexcitationseenbymaterial(BoundaryValueProblem)
Localwavedisturbancesresultingfrommechanicalexcitation
Howplatewavemotiondevelopsandpropagatesto othertransducer(howto modelmaterial)
Howmotioncausedbyplatewavepropagationinteractswithothertransducer
Howinteractionof platewavemotionwith thereceivingtransducercausesthereceivedsignal
ttow signalfromreceivingtransducer is electrically altered by receiving instrumentation
Although these questions are all, in their own right, complicated and to some degree worthy of
separate research, some primary understanding of these issues helps provide insight to basic results
and helps determine possible assumptions for modelling purposes. More importantly, these con-
eerns determine where future research should be directed to develop yet more refined AU tech-
niques. Specifically, understanding the full complexity of the situation, facilitates future
improvements of present simplified models and shows where difficulties exist in understanding ex-
perimental equipment, so that new equipment may be designed. For these reasons, some of the
issues above, although not totally accounted for, will be discussed briefly. Obviously, many as-
sumptions must be used to get a working model for this complex line of problems.
The ftrst issue is how the pulse produced by the pulsing unit produces stress waves in the material.
The pulse sent to the sending transducer is not a perfect pulse, but a finite width pulse of sinusoidal
shape. However if the proper settings are utilized, the pulse can be reduced to a fairly sharp pulse
width. In any case, an imperfect pulse is sent to the sending transducer, so that the input from the
onset has a nonuniform spectral density, even before pulsing the sending transducer. Obviously,
this affects the spectral density of the output. The character of this pulse may be ascertained by
140

consultingthe user's manual of the pulsing ulfit or experimentally analyzing tile pulse using data
acquisition equipment. It is necessary to ascertain the general frequency content of the input pulse
to make sure it is in the r;mge ..ff the transducer's resonance frequency and in the range of fre-
quencies for AU results of iutcrest. A further complication involves the manner in which the
electrical characteristics of this pulse affect the piezoelectric element and the circuitry of the sending
transducers (ref. 133). A crucial concern is the frequency content and the duration of the resulting
transducer vibration. This issue was partially addressed in chapter 3 by considering the pulse echo
spectrum of a large aluminum block (fig. 24). Note that although the sending transducer is a
heavily damped, wide band transducer, the spectral density of the excitation is very nonuniform for
the range of frequencies seen in AU results. In other words, certain frequencies seen ha AU results
have higher energies of input than others by sizeable margins. An additional complication involves
how the actual transducer vibration as a result of the signal may not be uniform as a function of
position. For instance, the crystal may not be perfectly aligned or uniform. Ultimately, a very
careful and exact characterization of a transducer should give the displacement field of the
transducer face as a function space and time for electrical input pulses. This most likely will involve
experimental characterization by methods such as optical interferometry. Certainly, the signal
generated by the receiving transducer is not a result of a perfectly uniform field, but an integrated
effect of a displacement field varying in time and space (ref. 152). To make matters even worse, the
displacement and stress of the piezoelectric element is transferred by eouplant to the material sur-
face. This is a source of great problem for modeling purposes and presents practical problems in
regard to reproducibility of results.
Eventually, the material surface experiences a force varying with time and position. Furthermore,
this force disturbance most likely involves both shearing and normal forces, even in cases where the
sending transducer is a longitudinal mode transducer, ltowever, most models for normal mode
transducers involve treating the transducer disturbance as a time varying distributed normal load
(ref. 99).
141

tlence,althoughrealizingthe situation is defnfitely more complex, elasticity results for the stresses
caused by a point force on a half space are utilized to determine what type of disturbances might
be caused in a plate due to a transducer placed on the top surface. This approach neglects a number
of effects, but does allow some indication of how the energy for input stress waves may vary as a
function of angle off the normal and as a function of azimuthal angle. A few of the effects which
this neglects are:
Effect of bottom surface
Effect of pulse shape or frequency content of input
Effect of load being distributed nonuniformly over a finite area
Effect of shearing forces which may be generated
ttowever, using a point normal force load, still allows a comparison of what effects the variation
of material properties with azimuthal angle might have on how certain wave motions vary with
azimuthal angle. Moreover, the normal mode of input is the dominant mode of input for this ex-
perimental arrangement. This provides a good qualitative picture of the situation and provides a
crude tool for quantitative modeling efforts. Also, for the case of an isotropic plate the problem
of distributed loading is considered, in a qualitative manner, to yield an indication of how
transducer size may affect results.
Next, consideration is shifted to how local disturbances created by the transducer may travel and
interact. More specifically, the focus is on characteristics of waves traveling normal to the plate
surface and to which wave motions would satisfy boundary conditions on the top and bottom
surfaces by through the thickness transverse resonance. The following are reasons for considering
the TTTR case:
142

The greatest input is through the thickness or just off at small angles (O's), so characteristics
of these waves are indicative of waves causing AU results
For lfigher order modes (that are TTTR modes for 0 = 0), even for a range of low angles of
0, the frequency is still near that of TTTR - this is central to understanding AU results
Results indicate that frequencies measured in AU results correlate to frequencies for TTTR
The main output for TTTR analysis are:
Displacements associated with wave travel for bulk waves through the thickness of tile plate
(specifically the variation of displacement for a shear wave motion with azimuthal angle for a
composite plate)
Frequencies for TTTR modes
Waves propagating slightly off the normal will have many characteristics that are just slightly dif-
ferent than the TTTR modes. The reasons for this are elucidated when consideration is moved to
the Lamb wave equations. Hence, one purpose of looking at TTTR is to get an indication of what
characteristics might be present for modes that are included in lamb wave analysis and to under-
stand these modes better.
The boundary value problem for waves traveling in a plate are described by lamb wave equations.
The derivation and basic approach to solving these equations were discussed in chapter 2. Obvi-
ously, since the AU method has been performed on a plate, equations describing wave motion for
a plate are relevant to the physical problem of AU propagation in aluminum and composite plates.
Moreover, many experimentalists have noted that characteristics of disturbances seen in AU results
resemble that of Lamb waves (ref. 9, 13, and 95).
143

Sh_cetile Lamb wave equations are physically representative of tim AU problem, their solutions
have been programmed. Appendices C, D, mad E contain 3 programs which calculate Lamb wave
rcsults for the three separate cases of an isotropic plate, a unidirectional composite plate (0 and 90
degree directions), and a unidirectional composite plate (any genera/direction). Two additional
appendices provide information on how the programs may be improved to yield a more general
code. Appendix G lists a program which solves the Christoffcl equation for a general direction; this
is essential to using tile method of uncoupled solutions. Next, a description is given of how tile
method of uncoupled solutions may be combined with present codes to arrive at a more general,
easy to use solution code for Lamb wave analysis.
The strategy of the computer program involved solving the dispersion equation and using other
equations relating the physical parameters of the plate wave problem to each other. An endless
combhlation of plots showing the relationship between various variablcs are possible, llowcvcr,
computer plots are given only for the follovdng results:
Dispersion curves
Velocities versus frequency
Displacements versus frequency
The purpose of these results is to identify what modes of wave propagation are present in AU re-
suRs. A/so, plots are provided to compare Lamb wave behavior at different azimuthal angles.
Signal Reception
Another important issue is the manner in which the receiving transducer integrates the disturbance
over its face to produce an output signal. To obtain an understanding of this situation consider-
ation must be given to what type of transducer is utilized. For instance, if a longitudinal mode
144

transduceris utilized,concernshouldbegivento us. Since longitudinal transducers were used in
AU experiments, the calculation of u3 is of interest in deriving theoretical comparisons.
Finally, tile signal from the receiving transducer is operated on by the transfer function associated
with the amplifier, attenuator, and fdter. The effects of this are important in developing a stand-
ardized method where the amplitude has an absolute value independent of instrumentation. Un-
fortunately, the modeling of other components is such that this is not yet attainable. In any case,
it is hnportant to make sure that the transfer function for this section of electronics does not fdter
out frequencies of interest or does not preferentially amplify certain frequency components.
Elasticity Solutions
This section chronicles solutions to the the elasticity problem for normal loads placed on an infinite
half space to approximate what stresses a similar load would cause on a plate of thickness 2b. This
shows how stresses vary relative to the angle of inclination from the source, hence paving the way
for determining how the input disturbance may cause more energy to be channeled into certain
Lamb wave modes relative to others, and moreover how drastically material anisotropy may affect
these results.
These solutions are for a single sagittal plane and the loading is assumed to be uniform as a function
of the direction perpendicular to the sagittal plane. For the artisotropic case, this leads to a difficulty
in interpreting results, because the load is distributed infinitely in the perpendicular direction,
causing the calculated stress in the direction perpendicular to the free surface to be different de-
pending on which azimuthal direction is considered. Hence, in these results the magnitudes of the
stresses are normalized to the value for the through thickness direction. The purpose of these re-
sults is to provide some indication of how the energy for Lamb waves varies due to the angle 0
145

associated with the P-wave input. Thus, the point here is to use tiffs solution to approximate the
magtfitude of the stress waves impinging on the bottom surface of the plate, for various angles 0
and relating the angle 0 and the magnitude ot the stress to the angle 0 3 for thc P-wave, and hence
to the magnitude for the Lamb wave related to that 03.
Point Load on an lsotropic Plate
The basic notation and geometry for the problem of a point load on a semi-infi_fite half space is
shown in figure 56. The dotted line corresponds to the surface where stresses are calculated to ap-
proximate the magnitude of stress waves impinging on the bottom surface of a plate. Oncc this
relative value is found the solution technique is be stfifted to Lamb wavc equations. This portion
of the solution serves to provide an exact value for the undetermined coefficient which multiplies
the displacement values found using the classical Lamb wave solution.
A simple solution exists for the stress field caused by this point load. In polar coordinates, this
solution is given by the following formula:
p cos(0)at=2 r_ r
Now, if we consider what stress this causes at positions corresponding to a plate ttfickness b, this
leads to the following formula:
p cos2(0)a r = 2 --ff 2b
I:igure 57 shows how a, varies with 0. The angle 0 relates to the input angle 0s, the input angle for
a P-wave. Tiffs may then be related to the frequency for a given mode by using the basic dispersion
relations:
o_=A¢)
146

:y
J_
AP
X
,O R
)_Ii.¢
(bJ
[ref. 154]
Figure 56. Definition of coordinate system and geometry for point load
147

and tile following equations:
_2 + 42 = (02/(vp)2)
03 = tan-t(_)
Itence, relations can be made between the input and the resulting character of Lamb waves which
may be excited. This connection will be discussed later in the next chapter with regard to modeling.
Isotropic Plate- Distributed Load
Figure 58 displays the geometry and notation utilized in the solution of a isotropic haft space with
a distributed load placed on the top surface (reference 154). This causes a uniform compressive
load:
p = -2Aa
where
Obviously, this causes the stress to be less for a greater distance correlating to the distance for plate
thickness 2b. Also, this value is lower for greater angles of inclination to the area covered by the
distributed loading.
148

1.2
STRESS VERSUS ANGLEISOTROPIC MATERIAL
STRESS
1
0.8
0.6
0.4
0.2
00 20 40 80 8O IO0
ANGLE
--STRESS
Figure 57. Variation orstress with input angle for point load
149

[ref. 154]
Figure 58. Definition of coordinate system for distributed load
150

Point Loading oll an Anisotropic Plate
The equations describing tile stresses resulting from a point load on an anisotropic half space are
much more complex than those describing stresses caused by a point load on an isotropic half
space. Results of these equations indicate a large variance in how stresses vary for diffcrent orien-
tations on the top surface plane (or different azhnuthal angles for for the plate constructed from
collapsing the half space to a plate). Thus, a normal input results in vastly different amounts of
stress and hence energy being transferred in different directions, due to variation of material prop-
erties. Specifically, tiffs section will forward Lekhnitsldi's solution for point loading on an
anisotropic half space. The strong dependence azimuthal angle has on how stress varies with an_e
from the normal to top plane should be noted. In general, stresses tend to be much greater at angles
off the normal for azimuthal angles relating to high material moduli. This would contribute to the
higlaer energy content for waves travelling in these directions.
A large system of equations must be solved to arrive at an answer to the stresses caused by point
loading on an anisotropic half space. Hence, this section will present the solution to this problcm
utilizing Lekhnitskii's notation (ref. 151) and state only the most reMevant equations. A more
detailed review of the theory used to arrive at these equations may be found in the above reference
by Lekhnitsldi.
The first relevant equation involved in the solution to this problem is the general 6th degree alge-
braic characteristic equation for solving anisotropic elasticity problems:
Id;)Uu) 2- t (u) = o
whcre
l4 = S 1 lU 4 -- 2S16# 3 + (2S12 + $66)/.t 2 - 2S26t_ + $22
13 = SI 5/.t 3 - (S14 -t- $56)/2 + ($25/.t -t- $46)# - $24
151

l2 = S55kt 3 -- 2451z + $66
Using tiffs the additional parameters may be defined:
In polar coordinates, the solution to this problem is:
P Re(i/A(ADI(O ) + BD2(O) + 2sCD3(O)))
rrz = - -_7 Re(i/A@AEI(O) + 22 BF'2(O) + CE3(O)))
where
,5 = u2 - _ + 22;-3(u_ - #3) + .a123(_%-t@
A = (_s_.22s - #2)
B = (_l -Ps2123)
C = 23(U2)ol --/_122)
Ol(0) = (cos(0) + u_ sin(0))2/(sin(0) - u_ cos(0))
D2(O ) = (cos(O) + P2 sin(O))2/(sin(O) - I_2 cos(O))
152

-g,
_4,.
_/////////J,
Iref. 151]
Figure 59. Definition of coordinate system for anisotroplc case
153

l)3(0 ) = (cos(O) + tq sin(O))2/(sin(O) - tL_cos(O))
E I(0) = (cos(O) + #_ sin(O))/(sin(O) - #_ cos(O))
E2(O) = (cos(0) +/'2 sin(0))/(sin(0) -/22 cos(0))
E3(O) = (cos(0) +/'3 sin(0))/(sin(0) - 123cos(0))
If the case of orthotropy is considered the equations are greatly simplified and can be expressed
as:
P_r = - "7 (ut + u2)($11S22) s cos Ol(rL(O))
where
L(O) = $11 sin40 + (2S12 + $66) sin20 cos=0 + $22 cos a0
and /dI and u2 are the roots of the equation
SI1 u4 -- (2S12 + $66)u 2 + $22 = 0
Note that in this notation S 0 are the compfiance values and the l-direction corresponds to the di-
rection along the length of the plate. Thus, the values used in the expression depend on azimuthal
angle and hence the stress state varies as a function of azimuthal angle.
Two programs were written to calculate how the stresses vary as a function of 0 for different ma-
terial directions. The first, (ORIN.FOR), calculates how or varies as a function of 0 in both the
fiber direction and the cross fiber direction (see figure 60 for results). The second, (GEIN.FOR),
will provide the same results from above for any direction. In these results, the values for the
stresses have all been normalized to the value in the through-the-thickness direction (0 = 0). The
154

codefor ORIN.FORis in appendixA and the code for GEIN.FOR is in appendix B. The calcu-
lations for these programs follow straight from the equations stated above.
In example, the dependence of o, on 0, for the cases where the fiber direction and perpendicular to
the fiber direction define the planes to be considered, are shown in figure 60. The major difference
in the two curves is the rather quick drop in or when the wave is scnt in the cross fiber direction
compared to the much slower descent of o, with angle in the fiber direction. Basically for directions
with high stiffness, the value of a, stays relatively high for increased angle off the normal 0. This
amounts to the basic effect of a stiff material seeing a greater stress for a given displacement set up
locally and hence relaying more of the energy than less stiff material directions. The difference in
magnitude becomes apparent at angles greater than 45 degrees. Hence, the fiber direction seems to
draw a higher magnitude disturbance at high angles, corresponding to the fiber direction.
In regard to the AU method, the variation of the radial disturbance with angle relates to what angles
stress waves may be directed. In relation to Lamb wave propagation, a higher angle 0 relates to a
lfigher wave number in the direction of propagation. Depending on the mode of Lamb wave
propagation this would have different effects on the nature of the lamb waves. For many of the
higher order modes, the higher input angle would cause higher group velocities, causing the
wavetrain to arrive earlier in the time domain. Also in context to wave tracing approaches, a wave
launched at a higher angle travels through less material, hence arriving earlier and experiencing less
material attenuation. This may relate to the high magnitude of energy early in the AU signal for
the fiber direction, since the higher angle would travel less distance to get to the receiver it should
show up earlier in the signal. Another way of looking at this involves noting the higher group ve-
locity for the higher order Lamb waves associtated with higher angles (this will be discussed later
in the section on Lamb waves).
The major point here is that for a vertical type loading to a free surface the variation of the radial
disturbance with angle can be calculated. Moreover, in general these calculations show the greatest
radial disturbance to be in the normal direction. In the case of anisotropic materials, these results
155

1,2
STRESS VERSUS THETAUNIDIRECTIONAL COMPOSITE
STRESS
1
0,8
0.6
0,4
0.2
00 20 40 60 80 100
THETA
(0 DEG) ..... (90 DEG.)
Figure 60. Variation of stress with input angle for unidirectional composite
156

show that the disturbance may result in more energy being relayed in the stiffest directions anti h_r
directions where the material is stiffest, tile radial disturbance stays large at higher angles 0. llencc,
for the composite plate we would expect a greater disturbance in the fiber direction and for more
of the disturbance to take place at lfigher angles (resulting in a greater disturbance earlier in the
signal). In terms of the AU method, this would cotTespond to greater energy content for the AU
signal in the fiber direction. Additionally, this would cause the wave characteristics for the fiber
direction to be associated with waves that have higher wave numbcrs in the fiber dircctkm. This
is in agreement with the high energy content at the beginning of the signal for the AU in the fiber
direction. For higher order modes, this is because of the higher group velocities for the higher wave
numbers associatcd with the higher input angles 0 3.
It should be kept in mind that Fraunhofer and Fresnel fields may also contribute to input effects,
hence, peaks in the loading function may occur at directions other than through-the-thickalcss,
which may result in a mode having more than one peak, where the peaks are closely spaced.
Furthermore, certain cases of aIfisotropy may cause peaks to occur at other directions than 0 de-
grees, naturally.
Through the Thickness Transverse Resonance
The basic idea behind the _ITTR concept is understanding how waves propagate perpendicular to
the plane of the plate and how they must be of proper frequency and phase to meet boundary
conditions. This section will concentrate on obtaining characteristics of TTTR modes for the plates
examined in the experiments in chapter 4, for the purpose of comparison. Basically, this will in-
volve finding the displacement vector for the direction of propagation of TTTR modes and then
the frequencies for TTTR modes.
157

Aluminum Plates
For the aluminum plates, the equations describing wave propagation are simple and wave motion
is independent of the direction of propagation. For bulk plane waves, the motion of possible dis-
turbances is one of three waves:
P-wave
SV-wave
SH-wave
For propagation in the thickness direction, this leads to an infinite number of possible directions
for perpendicular SV-wave and SH-wave motion, with both these motions perpendicular to the
P-wave (thickness direction) motion. Thus, the plane associated with any azimuthal angle would
possess the same properties for wave propagation characteristics. Therefore, it would be expected
that a symmetric input disturbance would result in an even amount of energy existing for a given
Lamb wave for all azimuthal angles (ie. symmetry prevails), ttence, this may provide a means for
checking the symmetry of a transducer.
Calculating the resonance (TTTR) frequencies resulting from this is rather simple and was covered
in chapter 2. The frequencies for various TTTR modes are displayed in figure 61 for the .0625 inch
thick plate and figure 62 for the .125 inch thick plate.
First, notice that the major frequencies seen experimentally for each plate correspond to frequencies
associated with TTTR modes, except the .7 MHz and .35 MHz low energy components seen at the
beginning of the signal and the very low energy 2.3 MHz component. Also, note that TTTR pre-
dicts frequencies for the .0625 plate to be double those seen in the. 125 plate as was noted exper"
imentally. Finally, the particular material parameters associated with alu_um cause certain
158

CUTOFF FREQUENCIES FOR ALUMINUM PLATE
6061-T6 (.0625 INCHES THICK)
MODE
NUMBER
0
SYMMETRIC
FREQUENCY
(MHz)
0.0
1.95
1.95
5.9
3.9
9.8
ANTISYMMETRIC
FREQUENCY
(MHz)
0.0
.97
3,9
2.9
7.8
4.8
Figure 61. TTTR frequencies (MHz) for .0625 inch thick aluminum plate
159

CUTOFF FREQUENCIES FOR ALUMINUM PLATE
6O61-T6 ALUMINUM (.125' THICK)
MODE
NUMBER
SYMMETRIC
FREQUENCY
(MHz)
0.0
.95
1.0
2.9
2.0
4.8
ANTISYMMETRIC
FREQUENCY
(MHz)
0.0
.5
1.9
1.,5
3.8
2.5
Figure 62. TTTR frequencies (Mllz) for .125 inch thick aluminum plate
160

modes to possess nearly the same frequencies. For instance, for the .0625 thick plate both the first
order symmetric and the second order symmetric TTTR mode are at nearly 2 MHz. However, in
this instance the first order symmetric mode possesses a negative group velocity for this frequency
range and may be contributing less to the signal.
Composite Plates
The problem associated with TTTR for composite plates is much more complicated than for the
aluminum plates. First, for the plane associated with any given azimuthal angle the motion of a
wave propagating in the tlfickness direction is not the same. Specifically, a wave propagating
through the thickness of a composite plate has only one solution (3 waves), compared with infinite
solutions (for infmite planes) for a wave traveling through the thickness of an aluminum plate. This
means the motion of the SV-wave and SH-wave (for the case of x3 propagation) are constrained to
take place in certain directions. Therefore, the first problem involves solving the bulk wave prop-
agation problem for the thickness direction and noting the displacement vectors associated with
each mode. Next, the frequencies for TTTR modes are calculated using equations stated earlier.
Bulk Wave Propagation Problem for Composite Plates
Solving the bulk wave problem for wave propagation in the thickness direction of a composite
material involves solving Christoffel's equation for the x3 direction. Hence, the Christoffel equation
indicates a P-wave with only u3 displacement. The one shear wave shows displacement in only the
fiber direction and the other only in the cross fiber direction. However, the displacements for a
given wave will have components in each of the coordinate directions when the wave is sent in a
more general direction, ttoweverl for small angles the values vary smoothly from the TTTR, so
that values are still predominately in the directions found for the TTTR case with smaller values
161

for the other directions, hence these waves become pseudo waves. A more exact analysis of tiffs
problem may be carried out by using the program (C/IRIS.FOR - listing in Appendix G).
The complication of trying to propagate waves at angles slightly off of the x_ direction may be ex-
tremely pertinent to understanding AU results. In the Clu'istoffel equation both v_ and or vl are
not zero and the resulting version of the Christoffel equation is much more complicated. The sol-
ution to these equations results in shear waves with _1, a2, and a3 terms. Ilowever, the general na-
ture of the wave should smoothly vary from that for the x3 direction solution. IIence, one might
still expect the resonance due to the each type of shear wave to perhaps be greatest in that respective
direction. This is suspected to be the cause for the high values in the following data:
A1(.23,.35) for the 12-ply specimen in the 90 degree direction (tiffs corresponds to the Ist order
antisymmetric wave in figure 64)
A 1(.53,.75) for the 24-ply specimen in tile 90 degree direction (this corresponds to the 1st order
antisymmetric wave in figure 63)
Also, the resonance for tile fiber direction oriented SV-wave may contribute to tile rclatively high
values of these variables in the 0 degree direction, since the TTTR frequency for this resonance is
so close to that for the SV-wave in the cross fiber direction. This points out a general problem of
trying to identify closely spaced and overlapping peaks. Thus, tiffs TTTR frequency is thought to
be associated with the resonance of a shear wave with motion in the cross fiber direction, causing
greatest motion in the direction where the SV motion is greatest for the plane bulk wave.
Itence, the physical understanding of the AU method and modeling should account for the general
nature of bulk wave propagation in the thickness direction and at angles sligl_tly off of the thickness
direction. Specifically, it should be understood that the amplitude of the pseudo SV-wave is of
much greater value for the fiber and cross fiber direction for the particular SV-wave associated with
each direction.
162

TTTR Frequencies for Composite Plates
Calculating the frequencies for the TTTR modes of an anisotropic material involves using formulas
stated in chapter 2. Notice that extra modes exist due to separate resonances for each shear wave
polarization. Figure 63 shows a table with values for the first few TTTR modes of the 24-ply
Gr/Ep plate, where material properties were estimated using bulk wave velocity measurements.
Figure 64 shows similar results for the 12-ply specimcn. The extra antisymmetric mode makes
picking out particular modes somewhat more complicated for the composite matcrial. I lowever,
again notice that frequency peaks seen in the AU experiments correspond to TTTR frequency
values predicted by theory, using measured bulk wave velocity values. The frequency for TTTR
modes are inversely dependent on plate thickness and agrees with experiment. In general, TTTR
seems to adequately predict frequencies found to be present in the At; data.
Lamb Waves
Solving the Lamb wave equations is by no means a trivial exercise and invoh, es a great de',d of care
and computer thne. The equations are transcendental for even the simple case of an isotropic
material. In effort, to gain understanding and to decrease computation time, three computer pro-
grams where written for cases of increasing difficulty. Specifically, the following three programs
were utilized:
DISA- Determhles the dispersion relations, phase velocities, and displacements for a Lamb
wave in an isotropic material
163

MODE
TTTR FREQUENCIES
24-PLY GR/EP
SYMMETRIC ANTISYMMETRIC
4
.46
,92
.36
1.1
1.8
.62
1.2
.23 .31
.71
.69 .93
1.4
1.2 1.6
Figure 63. TTTR frequencies (Mllz) for 24-ply Gr/Ep plate
164

MODE
TTTR FREQUENCIES12-PLY GR/EP PLATE
SYMMETRIC ANTISYMMETRIC
4
.70
.82 1.24
2.2
1,8 1,2
3.5
.46 .61
1.42
1.24 1.8
2.8
2.3 3.1
Figure 64. TTTR frequencies (Ml-lz) for 12-ply Gr/Ep plate
165

ORTII- Determines the dispersion relations, fmds phase velocities, and displacements for a
I.amb wave in an orthotropic material where the the wave is sent in a principal direction (for
a composite material this means in either the fiber or cross fiber direction)
GENE- Determines the dispersion relations and fmds phase velocities for a lamb wave in an
orthotropic material where the the wave is sent in any direction (for a composite matcrial this
means the wave may be sent in any direction relative to the fiber direction)
Basically, each of these programs involves solving the motion equation mad meeting the stress free
boundary conditions using an assumed linear type of motion. Each case involves careful attention
to where the solution takes place on the dispersion curve (ie. whcther the wave numbers are real
or imaginary). For the isotropic case, this has been fonnalized and the equatkms are fairly straight
fom-ard. The major concern here is noting when the wave numbers are real or imaginary to un-
derstand how the solution may have local maxima and minima which may or may not be coxlfused
as solutions. For the anisotropic solutions (ORTH and GENE), whether the wave numbers are
real or imaginary effects how the eigenvectors (wave number ratios /) are. determined from the
motion equation. This situation is especially confusing for the general case (GENE), where the
solution is the superposition of many quasi-waves, waves with both normal and shear components.
In fact, fmding solutions for the anisotropic cases involved using knowledge gained from the
isotropic case and utilizing the method of uncoupled solutions (ref. 127) to guide where solutions
are sought for the Lamb wave case. The method of uncoupled solutions is covered in reference I27
and in appendix tl, it involves setting boundary conditions that decouple shear and longitudinal
waves at plate surfaces. These can then be used as bounds for the Lamb wave solution. The
programs were written to allow tiffs information to be utilized. However, this requires that the user
modify the program code. In the future, these programs should be made more modular and robust,
so that computing can become more automated. Undoubtedly, this will entail some ingenious
programming. Appendix H discusses how the method of uncoupled solutions may be combined
with the existing codes to yield an improved program.
166

Thefollowingsectionsandsubsectionsdiscusstheprogramsutilized(programlistingsarein ap-
pendicesC,D andE),basicresultsandtherelationshiptheyhaveto AU results. Major emphasis
is given to identifying the modes of Lamb wave propagation which are present in the AU signal.
This involves examining at the dispersion curve and comparing the values of phase velocities stated
in chapter 4 to the values calculated by the programs for the Lamb waves.
Aluminum Plates
The solution to the Lamb wave problem for aluminum plates involves rather straight forward ap-
plication of the equations stated in chapter 2 for an isotropic plate. For the aluminum plate, there
is no effect due to azimuthal angle, so the Lamb wave problem only needs to be solved for one
plane. The solution can be obtained for symmetric and antisymmetric modes for any order mode
(fundamental, 1st, 2nd...). The same program calculates all these modes, however the user must
input whether the solution is for a symmetric or antisymmetric mode. Data sets from this program
were used for the plots in figures 65-69.
Computer Solution Technique
The equations utilized for obtaining the solution to the Lamb wave propagation in isotropic ma-
terials were covered in chapter 2, the same notation is utilized in the discussion below. The solution
involves picking values of the wave number in the plate direction 4, starting with low values and
increasing to higher values, making sure they are in the range of interest. The equations stated for
F(a, fl, ¢) = 0 are utilized, along with the other two equations relating the wave numbers to the
wave frequency and bulk wave velocities, to f'md the value of co that along with ¢ satisfy the con-
ditions for the desired mode of Lamb wave motion. Basically, this involves looking for where the
function F either gets very close to zero or crosses from a positive value to a negative value. The
167

computerprogramis named DISA.FOR and is listed in appendix C. The program variables
include:
Velocity of longitudinal wave
Mode of Lamb wave
Velocity of shear wave
Plate thickness
From this, the program calculates and stores in an output file:
Wave number in the plate direction, ¢, and circular frequency, co (in pairs)
Values for relative amplitudes A, B, C, and D for each pair
UTTT.FOR (Appendix F), reads the output fde and then calculates, and sends to separate fdes
each of the following data sets:
Dispersion curve (_o versus _)
Phase velocity versus frequency
Displacement, u_, versus frequency (other parameters could be calculated from given informa-
tion, such as stress)
The plots shown and discussed below were produced from these data sets.
168

Computer Results for .0625" Thick Aluminum Plate
The results of the computer program are comparable for the two aluminum plates with the fre-
quency values of the. 125" tlfick plate are only half those of the .0625" thick plate. Only the results
for the .0625" thick plate are given.
The plots of the dispersion curve and of the phase velocity versus frequency for the fundamental
symmetric mode of the .0625" thick aluminum plate are displayed in figure 65. Notice the
dispersion curve for the fundamental symmetric mode is linear for low frequency/low wave number
values. This means that the phase velocity and group velocity should be roughly the same value.
Then notice the decrease in slope over a short period and then the constant lower slope afterwards.
In the plot of phase velocity versus frequency, the phase velocity is shown to start at a value of
roughly 210,000 inches per second and asymptotically approaches a phase velocity of roughly
110,000 inches per second. It should be noticed that the main change in the phase velocity occurs
at roughly 1 MHz, which is the frequency corresponding to the first TTTR mode.
Figure 66 shows comparable plots for the fundamental antisymmetric mode. Unlike the symmetric
mode, the antisymmetric mode starts out very nonlinear at a very low slope and approaches a fairly
constant slope for higher wave number values. The plot of phase velocity versus frequency shows
that for low frequencies that the phase velocity for the antisymmetric fundamental mode is very low
and increases to approximately 110,000 inches per second, the same value the symmetric mode
approaches. In fact, this is due to the fact that both modes degenerate to Rayleigh type waves for
high wave numbers (_) and hence have the same phase velocity as a Rayleigh wave.
Similar plots for the first order antisymmetric mode are displayed in figure 67. Notice that the
dispersion curve does not start at the origin as does the two fundamental modes, gut starts at the
first TTTR frequency (1 MIIz). This leads to nearly infmite phase velocities, shown in the phase
velocity versus frequency plots. Also, the small slope for small values of _ corresponds to a low
169

a) DISPERSION CURVEFUNDAMENTAL SYMMETRIC
FREQUENCY2.5
1.5
1
0,5
0 ,i I I = = =O 20 40 80 80 t00 120 140
V_kVENUMBER
_FREQUENCY
b) PHASE VELOCITY VERSUSAZIMUTHAL ANGLEFUNDAMENTAl. SYMMETRIC WAVE
PHASE VELOCITY (tN/SEC.) (Thousands}250
200_
150
100
50
0O
[ I I I , , |
0.5 1 1.5 2 2,5FREQUENCY
-- PHASE VELOCITY
ALUMINUM PLATE
Figure 6$. a)D/sp, curve and b)V(phase)/rreq., plots for fund. symm. mode
170

a)
2.5FREQUENCY
DISPERSION CURVEANTISYMMETRIC
21 !iiiii1,,5
1
0..5
0
O 20 40 O0 80 100 120 140WAVE NUMBER
--FREQUENCY
b) PHASE VELOCITY VERSUS FREQUENCYANTISYMMETRIC
PHASE VELOCITY (Thousands)120
20 ....................................................................................................................................................................
(_ i i i iO 0,5 1 1,5 2 2.5
FREQUENCY
-- PHASE VELOCITY
ALUMINUM PLATE
Figure 66. a)Disp, curve and b)V(phase)/frcq., plots for fund. ant[. mode
171

group velocity and also means that for a range of values of _, relating to a number of input angles
0, the frequency is practically the same value. For low angles of input or small values of _, this
mode would have high values of phase velocity and would have very low group velocities. An
important point here is that a relatively large amount of the energy for this mode may show up at
a frequency range close to the TTTR frequency, displaying a variety of phase velocities (of fairly
high value) and a variety of group velocities. Analysis shows that even for an input angle of almost
90 degrees, the frequency for the first order antisymmetric mode is still at roughly 1.3 Mltz (see
figure 67). The variety of group velocities could relate to the fact that the AU signal (for a given
frequency) is spread out in the time domain. Also, note that the values of the phase velocity vary
quickly with very small changes in frequency and over a fairly small frequency range, while the
phase velocity approaches the Rayleigh wave phase velocity.
The first order symmetric wave shows an even stranger type of behavior. The dispersion curve
starts out with a negative curvature. This means that the group velocity is negative. The meaning
of this is not really clear. It may be that at low wave numbers this mode actually propagates energy
backwards for modes with positive phase velocities. Also, this means that for certain specific fre-
quency values, this mode of Lamb wave propagation may have two different phase velocities, group
velocities, and wave numbers. Additionally, this means there is a value of _ where the slope of the
dispersion curve is zero, and hence the group velocity is zero. As with the first order antisymmetric
mode, this mode shows high phase velocities for low value wave numbers. Finally, notice that this
mode starts at just below 2.0 MHz and dips to 1.7 MHz and then climbs back up.
The second order symmetric mode Shows behavior much like the first order antisymmetric mode,
but of course for _ = 0 shows a frequency value of 2.0 Mttz.
The higher order modes show similar behavior, but of course show higher frequency values for the
TTTR situation _ = 0. The only other mode to show a negative slope is the second order anti-
symmetric mode. Also, the higher order modes show dispersion curves with increasingly flat be-
havior for low values of _.
172

a)
FREQUENCY (MHz)1.2
DISPERSION CURVEANTISYMMETRIC 1ST ORDER
1 ............................................................................................................................
0.8
O.g
04
0,2
00
i i i i i i
5 10 15 20 25 30 35WAVE NUMBER
-- FREQUENCY
ALUMINUM PLATE
b) PHASE VELOCITY VERSUS FREQUENCY1ST ORDER ANTISYMMETRIC
VELOCITY (Millions)14
12 ..............................................................................................................................................................
10 .....................................................................................................................................................................................
8 ...................................................................................................................... , .....................
6 ............................................................................................................................. , .............
4 ........................................................................................................................................, .....................................
2 ........................................................................................................................................., .....................................
0 _ z ..... ± t
O 02 0.4 O.B 0.8 1 1.2FREQUENCY
-- VELOCITY
Figure 67. a)Disp, curve and b)V(phase)/freq., plots for 1st anti. mode
173

Comparison of Computer Results to Experimental Results
For the aluminum plates, the TTTR frequencies seem to be inversely related to the plate ttfickness
for both the experimental and numerical results. Specifically, the frequency for the higher order
modes shows a linear inverse relation to plate thickness. Since the experiments and theory agree
in this matter and the experimental data shows little other major differences, the rest of the dis-
cussion is specified to the .0625" thick plate.
For the .0625" thick aluminum plate, only 3 modes are possible for the 1 MIlz signal content- the
fundamental symmetric, fundamental antisymmetric, and the first order antisymmetric modes.
However, the large value for the experimentally measured phase velocity (chapter 2, fig. 34), im-
mediately disqualifies the two fundamental modes as the possible means of wave propagation.
Hence, further investigation should be centered on the first order antisymmetric mode as a possible
mode of wave propagation for the 1 MHz signal content seen in the AU signal. Further evidence
for this conclusion will be presented in the section on modeling. It should be noted that the 1 Mllz
area of the first order antisymmetric mode is in the low wave number _ area, relating to a low input
angle, agreeing with the predominately normal input associated with the AU method. Additionally,
the group velocity for the 1 MHz component of the signal was measured to be much lower than
the phase velocity, the exact situation that would be expected for the higher order Lamb wave
modes at low wave numbers. In figure 30 and 31, the peak at 1 MHz in the spectrum seems to trail
off slowly, indicating that a number of wave numbers are contributing to the energy content in this
frequency range. In otherwords, the the wider band width indicates that disturbances sent out at
a number of angles may be contributing to the signal in this frequency range (see fig. 74). In gen-
eral, the I Mttz signal content possessed characteristics that agree with the first order antisymmetric
Lamb wave for low wave numbers.
The 2 MHz signal content showed behavior that indicates that it is either the second or first order
symmetric Lamb wave. Although the frequency (2 MIIz) of the first order symmetric mode agrees
174

with the data, the negative group velocity associated with this mode does not agree with exper-
imental measurements. Hence, the 2 MHz signal content seems to be the second order symmetric
mode at low wave numbers. Notice in figures 30 and 31 that the peak in the spectrum for this
frequency content is much sharper, this may indicate that only the very lowest wave numbers are
contributing. This is also supported by the extremely high phase velocities measured for the 2 Mttz
signal content. Thus, the 2 Mtlz shows a sharper peak and a higher phase velocity than the 1 MHz
signal content, indicating that the 2 Mltz (possibly the second order symmetric lamb wave) signal
content may be due to radial disturbances more closely aligned with the vertical than the disturb-
ances associated with the 1 Mtlz (first order symmetric Lamb wave). Additionally, certain features
of the 2 Mttz peak (lack of skewness), indicate that the first order symmetric mode may also be
contributing to the energy in the signal at this frequency range.
The .7 MHz content at the beginning of the signal showed characteristics of a fundamental sym-
metric wave. This is supported by the measured phase velocity measurement and the fact that the
group velocity was the same as the phase velocity. Tlfis wave could be a bulk P-wave, however the
wave velocity is lower and agrees more with that of the symmetric fundamental mode. ttowever,
more work needs to be conducted to understand why the wave is centered at .7 MHz. This may
be a combined effect of transducer size and pulsing frequency. An understanding of this could most
likely be obtained by comparing Green's function results (ref. 14) to Lamb wave theory.
Finally, it is noted that a small 2.3 MIIz signal content was noted and that this frequency is that
of the Goodier-Bishop mode (ref. 142). It was not possible to measure the velocity of this mode
because of its low energy content.
Effects of Lamb Waves on A U Signal
For the aluminum plate, the AU signal consists of an early portion of the signal (.7 MHz for the
.0625" thick plate) which separates from the rest of the wave train due to a much faster group ve-
175

locity. This early porliou of tile signal seems to be a fundamental symmetric Lamb wave and is
present hi the wave train for a time on the order of tile pulse width.
The bulk of the wavetrain consists of a hi#ler amplitude, very fast phase velocity (yet varied), slow
group velocity, signal content which continues oi1 in the wavetrain for a much longer time than the
early part of the signal. It is believed that this portion of the wave train is made up of the higher
order modes at low wave numbers, corresponding to low input angles 03. The order of the modes
wtfich are excited depends on the frequency of the transducers and the thickness of the plate. As
indicated, the long wave train associated with the AU method agrees with what would be expected
from higher order [anti) waves. As a result of the hi_ler ampliludc and the wavetrain length as-
sociated with these modes, it appears that the energy content of the signal is dominated by these
higher order modes. This situation may not necessarily be true for all experimental arrangements,
however most reporlcd data, including the early work by VaIT that related AU to strength, utilizes
this type of experimental arrangement. Basically, the standard AU configuration directs most of
the energ3' in the through-the-thickness direction at a frequency range associated with TTTR values,
thus exciting higher order Lamb wave modes.
Experimentally, the effect of the wave velocities can be clearly seen by separating the sending and
receiving transducers and noting the cffcct on the wavetrain. For the .0625 plate, the .7 Mllz
contcnt separates into ttle early portion of the wave train, due to the fast group velocity and moves
rather undistorted, since the group velocity is comparable to the phase velocity. The other parts
of the wave train (l and 2 .\Illz portions) show phase points that move slJghlly in the time scale,
in other words display ve_' fast phase velocities, but whose amplitude values change rapidly due to
a modulating term which moves great dislances in the wave train due to a very slow group velocity.
In general, ulilizing a conventional AU arrangement on an aluminum plate resulted in a signal
which seemed to be dominated, in terms of energy content, by waves showing characteristics of
higher order l,amb waves. Specifically, this resulted in a long wave train dominated by frequencies
close to TTTR values.
176

Composite Plates
The Lamb wave problem for composite plates is much more complicated than for isotropic mate-
rials, solving this problem involved using the method of partial waves. An additional problem is
that the solution to the Lamb wave problem is different for every azimuthal angle. Additionally,
the computation involved for every azimuthal angle is much more complicated. Also, the
anisotropy of the material allows for additional modes of Lamb wave propagation.
Another major difference is that the Lamb waves for anisotropic materials tend to have kinks in
their dispersion curves, due to the crossing of the uncoupled modes (ref. 127). In other words, the
curves are not nearly as smooth, but tend to follow one asymptote and then follow another, re-
sulting in a change in direction. This is caused by the different material properties associated with
the different directions (03) associated with the different wavenumbers.
As with the elasticity solution, the Lamb wave problem for composite materials is easier to solve
in the fiber and cross fiber directions. One program (ORTH.FOR) was written to solve the lamb
wave problem for the simplified cases, fiber and cross fiber directions, and another (GENE.FOR)
was written to solve the problem for the more general case, where waves can propagate in any di-
rection.
It is believed that increased understanding and modeling of the AU method is possible through
rigorous application and amplification of the ORTH.FOR and GENE.FOR codes. The purpose
of this dissertation is to set the foundation for this approach, utilizing these two codes. Since these
codes are central to both present and future efforts, this text includes a discussion on the two pro-
grams, as well as the listings in the appendices (appendices D and E). Moreover, comments con-
ceming how these codes may be utilized and perhaps amplified are offered. In fact, discussion on
modeling in the next chapter involves utilizing these codes.
177

Computer Solution Technique
As mentioned, the method of partial waves is utilized in both the ORTIt.FOR and GENE.FOR
codes. The basic solution technique involves the following steps:
I. Define wave number value, k
2. Find a good initial guess for
3. Solve Clmstoffel matrix equation to obtain the values for wave number ratio/,
4. Find eigenvectors or displacement vectors a_ (choosing the right eigenvector is not a simple
matter and can drastically effect results if the wrong one is picked)
5. Calculate h]j from stress free boundary conditions
6. Calculate F by taking the determinant of K_
7. Determine if F is sufficiently close to zero (If/qs not zero, then go back to step 3 and try a
new value of _oand if F is close enough to zero then continue)
8. If the correct values for a k and w pair have been found, then use boundary conditions to find
values for C,,'s mad also calculate the phase velocity
9. Store data
10. If k is equal to the counter value stop, if k is lower than the counter then return to step one
178

Solvingthis problem provides the dispersion irfformation (co and k pairs). In addition, velocity and
displacement information can be ascertained in a simple fashion. In addition, other variables such
as group velocity may be estimated by additional calculations.
In general, the solution strategy is fairly straight forward, however there are a couple of issues which
can cause difficulties when generating results. These include both problems with interpreting results
from calculations and with choosing proper eigenvectors.
First, the function F may appear to be close to zero and yet not actually be going to zero. This is
due to tile complex nature of the function and the many local maxima and minima associated with
the F function. Alleviating this dilTlculty is possible by judiciously selecting co values that arc close
to tile correct co for the given k. This can be done by utilizing general knowledge on how dispersion
curves of Lamb waves behave and by utilizing the uncoupled mode theory to provide values for
irfitial guesses.
The other problem wlfich may be encountered in blindly appplying the partial wave equations is
that of not choosing the proper eigenvectors or displacement vector upon solving the Clu-istroffel
equation for the partial waves. Attention must be given to choosing eigenvectors which represent
the proper motion for the partial waves to make Lamb waves (see ref. 127).
The input for each code involves the following parameters:
Stiffness matrix
Material density
Plate thickness
Azimuthal angle
179

Informationonguesses,thisdefineswhatmodetile solutionis finding(eventuallythisshould
beincludedinprogramlogic-seeappendixIt)
OR TH.FOR
As mentioned, the solution for the case where the wave is sent in the direction of the fibers or the
cross fiber direction is much simpler due to the decoupling of P-wave and S.V-wave modes from
SlI-wave modes. This is obscrved when one looks at the eigenvalue problem derived from the
partial wave Christoffcl equation:
(l)_ + t2css)
E °(l(C_3+ css))
where Dij = CV--
0 (l(C,3 + c55)) at
0 (Dss+l C33) _'3
=0
/30,) 2
k2 , l is the wave number ratio, and a_ are tile displacement vector values.
Obviously, the middle term can be decoupled and solved for the SII-wave modes, ltowever, the
solution to tiffs problem for the general case of waves propagating in a general direction (ie. not the
fiber or cross fiber direction) leaves this matrix problem fully populated.
It should also be noted that the equation for the wave number ratio for the (P-wave and SV-wave
coupled) case yields four values of l that relate each of the four partial waves that make up the
symmetric and antisymmetric Lamb waves. This equation is derived upon setting the determinant
of the matrix to zero, factoring out the quadratic equation for the SH-mode and solving the 4-th
order polynomial. Since the equation only involves squared terms, the solution follows easily from
the quadratic equation. Then the values of the ct/s corresponding to each of the/'s can be deter-
mined up to a constant through back substitution. It is important to properly choose the a values.
This involves choosing partial waves where the displacement vectors are properly oriented. These
functions are performed in sections 4 and 5 of the code.
180

Next, the partial waves are superposed to obtain the displacement equation:
6
n=l
These values were then differentiated to produce strains associated with the stress wave propagation.
The strains were then combined with the constitutive relations to yield stresses. It should be noted
that tile values of C, determine ttle nature of tile displacement field for any mode of propagation.
q'he stress free boundary conditions determine these up to a constant, but it is the domain of
modeling efforts to determine this constant. This is discussed in the next chapter.
Next, the stress equations were used with the boundary conditions
r3(x 3 = + b) = 0
and
rs(x3 = + b) = 0
to yield tile next eigenvalue problem. Note these boundary conditions are only for the P-wave and
SV-wave modes. In tiffs problem, the values of C, are the eigenvector values.
The matrix K,i is obtained by taking the coefficient of each C, for each of tile four boundary con-
ditions, llence, the rows (i-value) of tile K,j matrix are determined by which boundary condition
is used and the columns (j-value) by which C, is used. The terms of tile matrix are defined in sec-
tion 6 of tile program ORTII.FOR.
Finding the determinant of K,j is used to determine if the dispersion condition is met. This involves
taking the magnitude of the dctenninant and checking if it is close enough to zero, mathematically
this is expressed by/:'(_o, $,/,, _,) = 0. Ttfis determinant of the matrix and the value F is found in
section 7 of the program. The equation for F is utilized to see if the w -k pair is appropriate (ie.
181

if thedeterminantK_j= 0). Section 8 checks to see if the dispersion condition is met. If the de-
terminant is zero then the equations from the stress conditions can be used to solve for the values
of C, up to the constant, which may be approximated by the elasticity solution. The values for
C, and the phase velocity are determined in section 9. Section 10 writes the results to output Ides.
GENE.FOR
The procedure for solving the Lamb wave equations in the general case are the same except that
the preliminary step of defining an azimuthal angle is necessary and each basic step is much more
complicated.
Steps i-3 set up the value used for k and co, in the same manner they were in ORTH.FOR. ]'he
only extra complication is that choosing guess values for the general case is orders of magnitude
more difficult.
Solving the Christoffel equation for the partial waves involves solving a 6-th order polynomial since
the StI-mode is coupled with the other solutions. Ilowever, the equation can be treated as a cubic
equation of squared values. This was solved using a standard approach (ref. 37). Section 4 contains
the solution to the Christoffel equation for the partial waves.
q'he equation for _ is similar, except all six partial waves must be included in the summed equation.
Application of strain and constitutive equations are similar, except that the extra shear stresses in
the x2 direction (_23) must be considered. Thus, the matrix K_j is a 6 by 6 matrix, instead of a 4 by
4. This makes the calculation of the determinant, and hence the calculation of F much more dif-
ficult. Sections 6-7 make these calculations
In general, the rest of the solution is similar and can be followed by comparing the listing for
GENE.FOR to ORTH.FOR. It should be noted that extra modes exist for the general case, hence
182

extra special care must be taken to look for the solution of a particular mode in the fight area. In
fact some of the higher modes, start at the same value of frequency co for _ = 0, but quickly turn
into different curves where different co's exist for the same _ (ref. 127). Determining these curves,
for just one azimuthal angle is a very arduous and time consumming endeavor.
Computer Results
This section will show some sample results found using the above codes for the purpose of showing
the utility of the codes and for the purpose of identifying modes of wave propagation associated
with the AU method.
The plots for tile fundamental antisymmetric modes for waves sent in the fiber direction and cross
fiber direction are shown in figures 68 and 69, respectively. Notice the effect of the material prop-
erties on the shapes of the dispersion curves.
Figure 70 displays the dispersion curve and phase velocity versus frequency for the fundamental
symmetric Lamb wave sent in the 0 degree direction. Figure 71 displays a similar plot for the
fundamental Lamb wave sent in the 90 degree direction. Similar plots for the third order symmetric
lamb wave are shown in figure 72 for the 0 degree direction and figure 73 for the 90 degree direc-
tion.
Comparison of Computer Results to Experimental Results
Information from these plots is useful for identifying the modes of propagation in the composite
plates and for helping to understand the general behavior seen in the experimental results. This
includes using both wave velocity calculations and dispersion curve results. Much of this discussion
is of a qualitative nature.
183

a)
FREQUENCY10
DISPERSION CURVEGR\EP 24-PLY UNDIDIRECTIONAL
8
6;
I4i
2
0
20 40 00 80 t00 120 140WAVENUMSER
--FREQUENCY
0 DEe. DIRECTION {FUND. ANTI,)
b) PHASE VELOCITY VERSUS FREQUENCY24-PLY GR/EP (UNIDIRECTIONAL)
PHASE VELOCITY (Thous8nd8)70
80
5O
40
3O
2O
10
0 i i I i
O 200 400 000 800 1000IZREOUENCY (Thousands)
-- PHASE VELOCITY
0 BEG. OIR. (FUNDAMENTAL ANTISYMM.}
i
1200 1400
Figure 68. a)Disp, curve and b)V(phase)/freq, plots, fun. ant. 0-deg. dir.
184

a) DISPERSION CURVE24-PLY GR/EP UNIDIRECTIONAL
FREQUENCY {Millions)10
8 .........................................................................................................................................................................
0
2
0
0 50 100 1,50 200WAVENUMBER
--FREQUENCY
gO deg, tund. anti.
b) PHASE VELOCITY VERSUS FREQUENCY24-PLY UNIDIRECTIONAL GR/EP
5O
40
PHASE VELOCITY {Thousands)
3O
20
gO deg. fund. aymm.
Figure 69. a)Disp, curve and b)V(phase)/freq, plots, fun. ant. 90-deg. dir.
185

a) DISPERSION CURVE24-PLY GR/EP PLATE
FREQUENCY (Millions)16
112
,o8
6
4
2
0 i i | I
O 50 100 150 200 250V_VE NUMSEIq
--F_EOUENCY
fund, symm. 0 deg.
b) PHASE VELOCITY VERSUS FREQUENCY24-PLY GR/EP PLATE
PHASE VELOCITY (Thousands)350
30O
250
2O(
15(
100
O l , I I I .,
0 500 1000 1500 2000 2500FREQUENCY (ThouSends)
-- PHASE VELOCITY
0 deg. fund. symm
Figure 70. a)l)isp, curve and b)V(phase)/freq, plots, fun. symm. O-deg. dir.
186

a) DISPERSION CURVE24 PLY GR/EP PLATE
FREQUENCY (Millions)10
8_0
4
2
0 i i i i
0 80 100 150 20(3 280V',_V E NUMBER
--FREQUENCY
symm in gO deg. dlr.
b) PHASE VELOCITY VERSUS FREQUENCY24-PLY GR/EP
PHASE VELOCITY (Thousands)100
oo_o iiiii40 .........................................................................................................................................................................
_0 ............................................................................................................................................................................................
0 I I I I I I I
0 200 400 O00 800 1000 1200 1400 1000FREQUENCY (Thousancls)
-- PHASE VELOCITY
gO deg, fund. symrn.
Figure 7 I. a)Disp, curve and b)V(phase)/freq, plots, tim. symm. 90-deg.
187

a) DISPERSION CURVEGRAEP 12-PLY UNIDIRECTIONAL
FREQUENCY (Millions).20
10
0 L i i i l I
O 20 40 60 80 100 120 140W&VENUMBER
--FREQUENCY
0 cleg, lit. 8nll,
b) PHASE VELOCITY VERSUS FREQUENCYGR/EP 12-PLY UNIDIRECTIONAL
PHASE VELOCITY (IN./S,) (Millions)8
6 ....................................................................................................................................................................
4 ............................................... _ ..................................................................................................................................
2 ..................................................................................................................................................
O I ,,t I I -T'----
0 500 1000 1500 2000 2500 3000
FREQUENCY (HZ) {Thousands)
PHASE VELOCITY
0 DIP. 111, t1_tl,
Figure 72. a)Disp, curve and b)V(phase)/freq, plots, 3rd. symm. 0-deg. dir.
188

a) DISPERSION CURVEGR/EP PLATE (UNIDIRECTIONAL)
CIRC, FREO, (MILL.)
30
0 | I I I
0 50 100 150 200
V_VENUMBER
gO dog. 1st anti.
--FREQUENCY
250
Figure 73. a)Disp, curve and b)V(phase)/freq, plots, 3rd. symm. 90-<leg.

The main issue here in terms of comparison to experimental results is that the phase velocities for
the fundamental modes are below those measured with the AU method, ttowever, the AU results
for the composite plate do not show nearly so drastic a difference in the phase velocities measured
in AU results compared to those predicted for fundamental Lamb waves.
Also, it is interesting to note the effect of the azimuthal angle (variation of material properties) on
how the higher order mode, 3rd order symmetric mode, behaves for small values of _. This shows
how the dispersion curve for the fiber direction turns upward (higher slope - higher group velocity),
much earlier than the 90 degree direction (see figs. 72 and 73). Also, note the abrupt change from
the quick rise to a slow move across, this is due to the 5th order uncoupled shear wave crossing the
uncoupled P-wave (see appendix It). The early steep rise corroborates experimental results, which
show more energy for this mode to be present earlier in the wavetrain for the fiber direction.
A more intensive study of how higher order mode velocity versus frequency plots vary with
azimuthal angle may help to explain the measured phase velocities given in chapter 4. In general,
the very nonlinear behavior of the curves for the higher order modes has a drastic effect on results
and the variation of material properties with azimuthal angle has an effect on the nonlinear behavior
of the curves for higher order Lamb wave modes.
Lamb Wave Propagation and A U for Composite Plates
Results indicate that, as with the aluminum plate, composite plates propagate the bulk of the energy
in the AU signal via higher order Lamb wave modes at relatively low wave numbers, corresponding
to small angles 03. This is not quite as obvious for the composite plates (especially the 24-ply plate),
since the measured phase velocities are not nearly as large for the composite plates as they are for
the aluminum plates. This may be due to a variety of reasons. For example, the general anisotropy
of the plates may cause the energy to be less centered at low angles, corresponding to the higher
phase velocities. Also, the higher material attenuation may cause the low angle (low wave number)
190

(highphasevelocity)wavesto bemoreattenuateddueto theincreaseddistanceof planewave
travel.Thisideaissupportedbythefactthatthe 12-plyplateshowedmuchfasterphasevelocities
thanthe24-plyplate(thickerplatewithmorematerialforreflectedwavesto travelthrough).The
widerbandwidthfor frequencypeaksin thecompositeplatesexperimentallysupportsthenotion
thatincreasedspreadof energyexistsin thecompositeplate,comparedto thealuminum.
In addition,dueto the variation of material properties with azimuthal angles, a number of inter-
esting phenomena affect the dispersion and displacement behavior of these modes with azimuthal
angle.
First, the displacement vector associated with shear waves sent in directions just off the normal di-
rection, x3, may have an effect on the disturbance caused by certain modes. This relates to the
discussion on the TTTR mode where it was noted that the two possible shear waves which may
propagate in the thickness direction are:
Shear wave where displacement is in the fiber direction
Shear wave where displacement is in the cross fiber direction
Thus, one would expect that for shear waves sent just off the normal, in for example the cross fiber
direction, the shear wave with displacement in the cross fiber direction would behave as a mostly
SV-wave and contribute to exciting out of plane displacement. The other shear wave would relate
to the SH-mode with just in-plane displacement for the cross fiber direction. Hence, one would
expect the high order mode that crosses the frequency curve at the value associated with the TTTR
for that shear wave to have a higher out of plane displacement in the cross fiber direction, where
the motion is predominately SV-wave type and hence contributes more to out of plane Lamb wave
motion, as opposed to SH-Lamb wave motion. This is an explanation for the high value of the
.234 Mttz signal content for the 24-ply plate in the 90 degree direction. A full utilization of mod-
eling efforts can be used to confirm or reject this heuristic argument.
191

For certain modes the displacement out of plane is large, while for others the in-plane displacement
is large. For the higher order modes at low wave numbers, the resonances associated with the P-
wave resonance (lst order symmetric, 2nd order antisymmetric, 3rd order symmetric, 4th order
antisymmetric) would be expected to have greater out of plane displacements. In fact, the 2nd order
antisymmetric seems to be one of the modes of propagation, while the 3rd order symmetric is most
delrmitely a mode seen for the 12-ply and 24-ply panels. Additionally, the 24-ply panel showed a
peak for the 4th order antisymmetric mode at low _imuthal -angles. Thus, the P-wave resonance
modes, which would cause a large disturbance at low wave number values, seem to contribute
largely to the AU results for the composite plate signal in the low azimuthal angle (high stiffness)
directions, this is confirrned by the high values of Al(.9,1.1), 3rd order symmetric wave (P-wave
resonance), seen in the 24-ply panel and the similar results for A1(1.9,2.1) obtained on the 12-ply
laminate.
Another interesting phenomenon is the quicker drop in energy content of the 2nd order antisym-
metric mode at low azimuthal angles compared to the 3rd order symmetric. For the 24-ply panel
this can be seen in the azimuthal plots of Al(.62,.68)-2nd order antisymmetric and Al(.9,1.1)-3rd
order symmetric. The 12-ply panels showed the same type of variation, in fact the results for the
12-ply panel showed an even more drastic effect of a high energy content at 15 degrees for the 3rd
order symmetric mode. This behavior has also been noted in numerous other panels (ref. 9,99).
A search for an explanation leads to a couple of places:
Does the energy flux for the antisymmetric motion draw energy over to the fiber direction more
than for the symmetric (Modeling efforts should provide this comparison)
Itow does the displacement behavior of the 3rd order symmetric wave compare with Ct, (plane
strain) variation with azimuthal angle, the displacement field associated with the 2nd order
antisymmetric wave, and E_ (plane stress), variation with azimuthal angle
192

It shouldbenotedthat the measurement of energy content of the 3rd order symmetric mode at 15
degrees is relatively low for the 2 inch measurement, compared to the 1 inch measurement. This
tends to indicate that the 1 inch results are simply due to a lesser energy flux deviation angle for
3rd order symmetric mode, compared to the 2nd order antisymmetric mode, in the 15 degree di-
rection, ttence, it may be simply a matter of energy flux and geometry. An understanding of this
effect may eventually become possible by utilizing modeling ideas forwarded in the next chapter.
Eventually, energy flux behavior may be more directly related to engineering properties discussed
in the literature search (coefficient of mutual influence etc.) and these results may provide a good
experimental means of determining how local values of these parameters which measure material
anisotropy change with damage.
Another aspect associated with the higher order modes is the fact that for low wave numbers the
frequency is practically the same for a sizeable range of wave numbers. This means that the energy
seen for a certain higher order mode at a certain azimuthal angle is actually the integrated effect of
the energy associated with a range of low wave numbers. Thus, this is where the issue of how
material properties affect the nature of these curves and where they curve up (show a higher group
velocity) becomes an issue. Figures 72 and 73 show how the stiffer material in the 0 degree direc-
tion affects the shape of the dispersion curve for the higher order mode, and hence signal energy
content, frequency content, and time placement.
In general, a number of effects control how the energy originally introduced to the top surface of
the composite plate is channeled through the plate in the various azimuthal directions. These in-
clude the following:
Itow surface input disturbance causes different radial disturbances (elasticity solution)
Dispersion curve behavior
193

Displacement associated with each mode and how it is affected by direction (this effect is es-
pecially noted in the high energy for the 1st order antisymmetric wave rclated to the SV-wave
for tile cross fiber resonance condition)
l;nergy flux behavior
Variation of damping effects with azimuthal angle
Directional effects of damage on different modes
The identification of the higher order modes wlfich make up the AU signal will allow tile under-
standing and computation of these effects to be accompfished.
General Physical Uuderstanding of A U Results
A series of carefully pcrformed experiments on tile AU technique have identified the major modes
of wave propagation prcscnt in tile AU signal as lfigher order Lamb wavcs with low wave numbers
k that corrclate to low input angles. A number of factors contributc to tlfis conclusion:
Results indicate disturbances are the same on the top and bottom surface (ref. 8)
Phase velocity measurcmcnts
Group velocity measurements
Frequency content
These modes agree with modes that would have maximum displacement out of plane
194

Thesemodeswouldbeexpectedbasedon theory and characterization of input
Furthermore, an understanding of why these waves dominate the AU signal can be ascertained by
looking at several factors:
Elasticity solution for point load on a half space (idealization of transducer input) shows that
the major radial disturbance takes place at low angles, corresponding to low wave numbers,
agreeing with general observed behavior and other theory
The frequency response of the transducer used in this work (representative of transducers used
in general AU configurations) causes disturbances that arc of a frequency range (TTTR fre-
quencies) for the higher order modes at low angles instead of the lower frequency range that
the fundamental Lamb waves would have for low angles of 03
The higher order modes show disturbances at a range of low input angles that are of a relatively
constant value of frequency, hence the peak in the frequency domain corresponds to a number
of points where the dispersion curve is fiat and of a fairly constant value
Some of tile higher order modes seen have a large u3 (however, other modes seen would not
be expected to have as large of a u3?)
In simple terms this means, that if you apply a predorninately normal force sufficiently fast to the
face of a plate, then radial disturbances will emanate outward at various angles, with by far the
greatest energy content in the thickness direction or at small arlgles off of the thickness direction.
Disturbances that contain frequencies relating to wavelengths that are half multiples of the plate
tlfickness and of proper phase will meet the stress free boundary conditions and hence propagate
through the material by reflecting back and forth between surfaces. Results indicate that by using
higher frequency transducers, it is possible to excite higher order Lamb waves. The I.amb wave
equations describe the plate modes caused by the plane waves resonating between the top and
bottom surface of the plate, ttence, a physical understanding of this behavior may be obtained by
195

attemptingto tracethisreflectionproblemor by simplyusingtheLambwaveequations.Obvi-
ously,wavemotionimpingesuponthestressfreesurfacesandresultsin sizeablesurfacedisplace-
ments,to bemeasuredbythereceivingtransducers.
Anotherinterestingfactis that in all casesthephasevelocitymeasuredfor thehigherfrequency
washigherthanthelowerfrequency.Thismaybeexplainedbynotingthatfor agivenk value, the
£o
higher frequency value will obviously have a higher phase velocity (v,j.... = -_). Hence, for the
range of k's associated with the AU mcthod, higher frequencies should causq a higher phase ve-
locity, for higher ordcr Lamb waves. In this regard, experimental results again agree with a physical
understanding based on higher order Lamb waves.
Also, the wavetrain for the .0625" thick aluminum plate showed the 2 MIh signal to dominate the
end of the wavetrain, which agrees with the expected behavior of the 2nd order symmetric Lamb
wave, relating to the long smooth slope of the dispersion curve. The small bandwidth on the 2
Mltz peak also agrees with the slower rising behavior of the 2nd order symmetric mode.
The experiment on tilting the sending transducer showed that by causing more of the disturbance
to be sent at higher angles of inclination to the normal causes a slight increase in the values of the
frequency peaks. This shows that the higher angle 03, causes a higher wave number k, causing a
higl:er frequency value. In terms of resonance this generally relates to a longer wavelength. An-
other major point here is that this tends to indicate that the mode of propagation related to the
negative group velocity portion of the 1st order symmetric mode is not contributing to the signal,
validating claims in a couple of incidences where this mode was discounted as a mode of propa-
gation, in place of another mode with a closely placed frequency value.
Experiments performed on the tapered plate provide further information on the general nature of
the wave propagation associated with the AU method. One major interest in performing these
tests was to see if the frequency content of the signal obtained across the taper was more indicative
of the frequency content of the side where the sender was placed or where the receiver was placed.
196

Results showed that the signal across the taper showed frequency peaks associated with both the
sending side and the receiving side. One notable result is that a .5 Mltz peak was produced by
placing the sending transducer on the thin side (where the lowest TTTR frequency is 1.0 Mllz) and
the receiving transducer on the thicker side. The major pohlt is that the disturbance is not produced
solely by way of the sending transducer creating resonances directly through the thickness, but is
the result of plate waves being produced by plane type waves sent off at various angles, ltence, this
set of experiments substantiated the physical understanding obtained from experiments oi1 the flat
plates.
197

AU Modeling
As stated in the introduction, engineering requires basic models for use in relating measurable pa-
rameters to parameters which predict ensuing material behavior. The purpose of modeling the AU
techtfique is to relate AU parameters to parameters which describe composite material behavior.
To start with, AU results can be related to the moduli of composite materials. This is possible
utilizing concepts from our physical understanding of the AU method. Tfius, the first section of
this chapter will forward a basic approach for modeling the AU method using the physical under-
standing of the AU teclmique forwarded last chapter. This will include a partial example for an
aluminum plate. Comments are offered on the procedure for modeling the AU of a composite plate
and the difficulty in computing all the results. Next, comments are offered on other factors which
contribute to AU results and how to possibly account for lhem. This section consists of a good
deal of conjecture and is presented to foster further developments in AU modeling.
The final section of this chapter contributes statements on relations between AU modeling and fa-
tigue modeling. This is the fusing step which should help transform the AU method from a non-
destructive testing technique to a nondestructive evaluation technique.
198

Simple ,4 U Model
Utilizing concepts from the last chapter, a procedure for modeling the AU technique may be de-
veloped. Obviously, this will involve using the theory forwarded in the last chapter along with in-
formation obtained by comparing this theory with experimental results. Specifically, certain
assumptions are made based on experimental results. The outline for this procedure follows these
basic steps:
1. Determine spectral density of input force from transducer
2. Determine dependence of the magnitude of the radial disturbance on angle (0) [elasticity, finite
element method etc]
. Solve TTTR problem with particular attention to displacement vectors for transverse reso-
nance modes (this gives information on frequencies of interest and on displacement for trans-
verse modes)
4. Solve lamb wave problem for higher order modes and obtain basic dispersion information
. Solve for u_coefficient values, at low wave numbers, by using stress free boundary conditions
and setting the value of the coefficient for partial wave (composite solution) or P-wave po-
tential (isotropic plate solution) equal to relative magnitude based on radial value of a, from
elasticity solution or other method like t'mite element method
, If solving for a general direction on the composite material, solve for the value of x,e and set
the magnitude of the corresponding shear wave equal to the same value and then solve for u,
again
7. Add the values of u_ together from both the P-wave and the SV-wave
199

8. For composite plate do steps 1-7 for different azimuthal angles
9. Compute energy fluxes for various azimuthal angles on plots
10. Compute the energy flux by some sort of integration scheme for a given region of area related
to region of arc associated with how many azimuthal angles are utilized (this is discussed later)
11. For each mode of propagation over a range of frequencies calculate the magnitude of disturb-
ance for that mode (ie. u3, magnitude of E_ vector, etc.)
12. Compare variation of magnitude indicator with frequency to spectrum output and compare
values of relative peaks
This gives us basic information on the relative values to expect for various peaks in the frequency
spectrum for an undamaged specimen and an indication of what AU values should be relative to
each other. Moreover, for a composite material this provides a means for predicting how various
AU parameters may vary with azimuthal angle. At the very least, it provides a means for predicting
what frequency content should be present for various applications, contributing a tool which may
be used for developing optimal AU systems to get the most informative AU signal. Also, with
improvements in the model and the method in general, this may provide a means for keeping track
of the materials energy dissipating mechanisms. An understanding of how the energy in the various
modes, with their various displacement and stress fields (given by theory), is transmitted or dissi-
pated may provide important information on the mechanical effects of different damage states.
Conversely, this provides a means for identifying the damage state and perhaps the magnitude of
its mechanical effect. This type of understanding is possible now that a physical understanding of
the AU method for composite materials exists.
Information on stiffness may be determined by measurements made in the time domain which in-
dicate phase velocities and group velocities. If a phase velocity and a group velocity can be exper-
imentally measured for a given frequency range over the length of the signal, it may be possible to
200

obtain a fairly accurate dispersion curve. Using theory, the same dispersion curve may be con-
strutted a number of times using various values for material properties. By comparing dispersion
curves, it may be possible to infer (eg.regression techniques) the variation in material properties
with angle for that direction. In fact, a system could be designed that has one sending transducer
and two or more transducers at various azmimuthal angles to determine material properties in a
number of directions. The system may also be improved by filtering the signal to certain frequency
ranges to keep out the effects of other modes and to hence make velocity measurements easier.
Modeling efforts may make it possible to make quick stiffness measurements in all directions via
the AU technique. However, this will involve using more advanced signal processing techniques,
such as the analytic signal (refs. 16 and 147). Also, it will entail using an altered experimental set-up
with multiple transducers and various other experimental additions. Again, interpreting results from
this type of arrangement are possible now that a physical understanding of the AU method exists.
In general, the long wavetrain associated with the AU method is packed with information from the
numerous modes and ranges of wavenumbers on the dispersion curve, which contribute to the
signal. Now that these modes have been identified, experimental set-up and signal analysis can be
used to obtain as much information as possible on material state. Undoubtedly, this will take years
of further work, but now that a basic physical model is formulated, this work has a direction to
follow.
Aluminum Plate Application
In order to understand the application of the modeling approach, a short example is provided to
exemplify how the frequency spectrum for a Lamb wave mode may be calculated for AU on a
.0625" thick aluminum plate using 2.25 MHz transducers. Also, this application of the model acts
to exemplify certain aspects of the physical understanding which were tacitly stated in the last
chapter. The effects of other facets of the problem, such as frequency dependent attenuation, are
201

notaccountedfor in these predictions. Because of this and the simplification of other facets of the
problem, the purpose here is not to reproduce the exact spectrum, but to show the general trend.
The AU method was performed on the .0625" thick alumhmm plate, using 2.25 Mltz transducers.
The characterization of the sender was shown in figure 24 in chapter 3. The effect of the transducer
frequency response and the effect of the way the radial response varies with the angle from the
normal are included in calculations. First, the functional dependence of tile magnitude of the input
was shown to be cos2(03). This value was just substituted into the value for the P-wave magnitude
in the displacement equations. Displacement values for a set frequency were then multipfied by the
magnitude of the transducer response for that frequency to account for the frequency dependence
of the input.
A plot of u3 (displacement) magnitude is offered for the 1st order antisymmetric mode on the .0625"
thick plate, along with a comparison spectrum for the same plate, in figure 74. This plot shows that
the frequency dependent behavior of the displacement values are similar to the behavior of the 1
Mttz peak in the AU spectrum. Note that both the model and the signal spectrum show a curve
which rises rapidly to a peak at 1 MtIz and trail off to zero at about 1.3 MHz. Another point of
interest is the symmetrical nature of the 2.0 MHz peak and the minima value at around 2.0 MHz
in the signal spectrum. This may be due to the combined effects of the 1st and 2nd order symmetric
Lamb waves, where the 1st order is contributing to the rising part of the left part of the peak (e.g.
for lower frequency values after the minima of this function).
An additional, concern here is the idealization of the cos2(03) as the input variation. In reality,
Fresnel and Fraunhofer diffraction effects are most likely taking place. Future models should at-
tempt to include these type of effects on the input and, hence AU results.
Ultimately, a less simplified model should sum the effects of every Lamb mode that is within the
frequency range of the system. This would provide a means for noticing abnormalities in results
and perhaps at some point modeling these effects.
202

a)
U-3
20
U-3 VERSUS FREQUENCY1ST ORDER ANTISYMMETRIO
10 ...................................................................................................................................
O i I I I
O 0.2 0.4 O0 ' 0.8 1 1.2
FREQUENCY (MHz)
-- U-3 DISPLACEMENT
ALUMINUM PLATE
b)
Figure 74.
3.8£-08
3, ?E-C$,
3. SE-08,
3.SE-08,
3, qE-,38 -
3,3E-00 !
3.2E-08
3. tE-06
3,0£-08
2.9E-e8
2. BE- OO
2. ?E -GO
2,6E-00
;z,sr.-_0
_.qE-C9
E, )£- 08
W Z,_E-28 •
-- ! • gE-o_ •
K. ?E-o_ ]..... I
1,5E-C_
I, 3E-,]t
h ;JE-CO
1.0E-38
9, OE-,_3
II. OE-G9
7.0E-0g •
6, £'E-:;9,
S.OE-09,
q,OE-09 •
3. OE- og,
Z,0E-09.
3.gE-]6
I
- , , • . . , . .
FREQUENCY' (MHZ
ALUMINUM
comparison of a)modeled AU response (lst. anti.) b)exper, spect.
203

A couple of the more pertinent issues concerning this approach include:
How the effect of the input disturbance is included in the Lamb wave equations
What to use to model the magnitude of the output for AU signal (eg. u3 etc.)
Here the input stress (calculated from the elasticity solution) was simply used to control the mag-
nitude of the P-wave potential. However, there may be a more appropriate means of accounting
for the input.
For normal mode transducers, it would be expected that the u3value at the top surface would cor-
relate most closely to the output signal, but for other measurement techniques, the values of other
displacement terms or stresses may be of use.
Discussion of Applying Model to Composites
The problem of modeling the AU method for composite materials is significantly more complicated
than for isotropic materials. Anisotropic properties not only cause the variation of the AU response
with azimuthal angles, but make the calculation of Lamb wave dispersion curves much more
complicated due to the variation of properties with the angle off the normal and the coupled be-
havior of the quasi P-wave, quasi SV-wave, and quasi SH-wave. Major problems, beyond concept,
exist with the computing problem and the huge effort that it takes to even obtain the basic
dispersion information in a general direction using the uncoupled mode method.
First, the elasticity problem provides stresses to indicate the magnitude of the disturbance at each
input angle 01 or 0a. This involves a good deal of computation, just to get the stresses. Then, the
shear and normal stress are each used in separate calculations with the Lamb waves. However,
204

there may be a more appropriate means for including both these stresses in one Lamb wave dis-
placement equation solution.
Next, the general solution for a Lamb wave is the summation of a six term displacement equation.
The 6 term displacemcnt equation is then differentiated for strains and utilizcd in the constitutive
relations to get stresses. This then creates very long tcrms which dcscribe the stress ficld. These
equations are then used in the stress free boundary conditions to create a 6 by 6 system of equations
which need to be checked for the dispersion condition and then can be uscd with the elasticity re-
suits to calculate the coefficients of each of the 6 partial waves. Just to fred a point on the curve
involves stepping through tiffs procedure 100's of times. Then to obtain the whole curve involves
going through the whole procedure including the search for the fight solution hundreds of times.
]'his must be done for a number of modes and then a number of azimuthal angles.
Finally, consideration must be given to energy flux. Calculating tile energy flux deviation for a
Lamb wave, where the displacement equation is represented by 6 terms, creates another huge
computational chore. Accounting for the effect of the energy flux deviation causes one of the major
conceptial difficulties associated with modeling AU of composites. The following is a simple ap-
proach for including tile effcct of energy flux in AU results:
Solve the Lamb wave problem for certain discrete azimuthal angles
Calculate energy flux direction for each Lamb wave mode
Solve the geometric problem in order to fred, for a particular transducer size and transducer
separation distance, where on the arc subtended by the receiving transducer the effect of dis-
placement is present
Integrate displacement for each azimuthal angle to fmd a distribution of displacement along the
arc
205

Thenthevaluefor eachexperimentalreadingcanbecomparedto thatof the integratedvalue
forthedistanceoverthearcassociatedwiththereceivingtransducerdiameter
Thismaymeanthatattenuation,with d, is caused by the decreased range of azimuthal angles the
receiving transducer covers for increased separation distance between transducers. Additionally, this
may explain why the 3rd order symmetric mode declines slower at low azimuthal angles than the
2nd order antisymmetric mode for d = 1 inch. Since the flux deviation for plane waves can be on
the order of 40 degrees for a composite material (ref. 128), this effect can not be overlooked for AU,
especially for situations utilizing small transducers separated by larger distances.
Ideas for More Advanced A U Modeling Efforts
Obviously, the modeling mentioned above assumes the absolute ideal situation of a material with
a linearly elastic constitutive relation and no damage or inhomogeneities. Work on including the
effects of nonideal situations is still being developed for plane wave propagation, as was mentioned
in the second chapter. Since we understand basic modes of propagation, future work could include
introducing these considerations to the present understanding of AU results. It may be especially
important to include more complex effects to help model how damage may alter AU results. Since
little information in general exists concerning Lamb waves in anisotropic materials, models includ-
ing more advanced material behavior would most likely involve even further theoretical work.
Additionally, the already prohibitive calculations could very easily become totally impractical.
However, theoretical work could still be utilized to provide qualitative information and to develop
reasonable methods of approximation.
206

Source Modeling
Also, possible improvements could be made by using finite element or finite difference to determine
radial variation of input disturbances for the composite plate for different azimuthal angles. This
could allow for inclusion of the plate geometry, the transducer size, and the spatial variation of the
transducer disturbance.
Geometric Effects
Another issue to be considered is that of geometry associated with the source and receiver. In tlfis
regard, a host of drastic idealizations are involved with the present modeling of the AU method.
First, the sending transducer does not produce a perfect plane wave. In fact, it would probably be
more appropriate to model the source using cylindrical coordinates, such as was done for an
isotropic plate (ref. 140). Note, this analysis yielded a Bessel function solution which degenerated
to a plate wave type solution at distances far from the source. Although this analysis is not suited
for anisotropic materials, it may be advisable to at least note the l/r dependence of displacement
with distance from source.
Also, it should be noted that the receiving transducer is actually picking up disturbances associated
with a range of angles. This effect is especially large when the distance between transducers is small.
This practical difficulty along with angular variation of energy flux is consistent with the fact that
AU results show that the 1st order symmetric mode decreases much slower at small angles than the
2nd o_;der antisymmetric mode.
207

Time Domain Information
The prediction of the voltage/time signal for an aluminum plate has been accomplished utilizing a
variety of theoretical approaches. Ilowever, no such results exist for a composite material. Solving
tiffs problem would provide an extremely useful tool for understanding more of the physics asso-
ciated with the AU results and make time domain calulations of wave velocities and calculation of
material properties more feasible.
"lhe approach utilized by Vusedeven and Mal (ref. 129) provided results for the response for a source
on the face of an alumhmm plate that resembled AU results. Their approach utilized thc anal)sis
of Lamb wave equations to develop a fairly cfftcicnt computational scheme, llowever, this ap-
proach has not been extended to ,'misotropic materials. Applicalion of the exact approach is not
theoretically possible for an anisotropic material, however a variation of the approach may provide
an eventual means for developing a method to prcdict the voltage/time signal for a composite ma-
terial. Work of this type would most likely require a concentrated effort from rescarchers in a
number of areas working together. A more practical approach may be to use a multi-transducer
configuration with AU to measure phase vclocitics and group velocities and use this and spectral
information to reproduce dispersion curves for use in NDE (rcfs. 12 and 13). llencc, a single
measurement could bc used to rcproducc a whole section of a dispersion curve, l lowevcr, this
approach would involve a great (teal of instrumentation and other dcvclopmcnts that would require
years of work.
208

Relating A U to Damage Modeling (NDE)
A number of approaches could be used to relate AU results, AU modeling and damage modeling.
These ideas run from making very simple empirical relations to making very idealized, yet complex
energy arguments. A good middle ground for starting is to try to utilize how changes in mechanical
properties arise in both models. The real strength of the AU technique may be its interaction with
various material components on a high frequency scale and the attendant mechanisms for energy
loss or redistribution due to damage, imperfections, inhomogeneities, or general nonideal material
behavior.
First, the AU measurement may be utilized directly with the simple modeling procedure forwarded
by Poursartip and Beaumont (ref. 108). Application of the AU method with this model simply
involves making empirical relations between AU measurements as a function of fatigue cycles and
failure. The AU value has been shown to be more sensitive than the stiffness measurement as a
means of tracking damage (ref. 88). This is due to the large effects of damage on the high frequency
waves associated with the AU method. But, the mechanical understanding of the effects of damage
on the wave propagation are not nearly as developed as the understanding between damage and
stiffness change. Therefore, at present the use of the AU value in the model would be totally ad
hoc. tlowever, future developments with models such as the one being developed here may change
this. In fact, the model presented posesses the possibility of obtaining stiffness information and
may be further developed to include the effects of damage on AU values through changes in
stiffness, damping, reflections, scattering, etc..
Stress redistribution and concentration is one area where the AU method shows promise of relating
to the critical element model, especially with an understanding of the stress states associated with
Lamb waves. Eventually, the variation of AU with azimuthal angle may be utilized to give local
values for FL(n). Thus, it may be possible to obtain information on impending failure modes and
209

stress concentrations by noting how the local stress state or displacement field for Lamb waves is
modified by damage in a material. In other words, the AU method may possess the ability to map
the way a given type of displacement (eg. longitudinal and shear) are distributed in a local region
of material. The exact relations between how the rcdistribution of stress for a high frequency l.amb
wave and fatigue loading is not directly clear. Itowever, starting with this model of wave propa-
gation for the AU method, work can be geared toward deriving the elasticity problem that would
produce the results given for stress state changes of the AU waves. At the very least, the AU results
may be utilized to understand how damage is controlling mechanical behavior at various azhnuthal
angles.
In tiffs vein, research has already been conducted by Duke and Kiernan (refs. 70 and 100) to utilize
the variation of AU with azimuthal angle to predict the direction of damage growth in composite
materials that are impacted with a steel ball. This work has shown that damage shows some
tendency to grow in directions of high AU.
Effects of damage on AU results for some directions has been noted (refs. 102 and 130). llow
certain types of damage states interact with material motion may yield a means of identifying certain
damage modes and additionally assessing their mechanical effects, tlowever, caution should be
used in relating the mechanical behavior of a high frequcncy stress wave to other forms of loading.
Also, it has been noted that localized impact damage has even caused AU measurements to increase
in some directions (perhaps due to redirection of reflected energy) this could perhaps help to cal-
culate stress concentration factors.
In general, the present physical understanding of how material properties affect AU results provides
understanding of certain AU results and paves the way for utilizing the AU technique to determine
material properties, thus providing information for use with damage models. Information may also
be obtaincd on other energy dissipating and redistribution mechanisms for use in damage models.
210

It may involve a good deal of future work to reach this level of understanding, but tile present
groundwork at least provides a starting point for research efforts.
Although the present modeling efforts are rudimentary, they provide a building block for utilizing
the physical understanding, obtained through experhnent, to develop advanced modcls for NDE
applications. The ftrst major problem in tiffs effort is the computing difficulties associated with the
composite material AU modeling. Unfortunately, the inclusion of more advanced models would
only compound this problem. Perhaps improved computer technology will lessen tiffs problem.
In any case, by relating AU models to material properties, it is hoped that further relations may
be made to prediction models of material failure, due to things such as fatigue.
211

Conclusions and Overview
The AU method has proved to be a viable NDT technique in a wide variety of laboratory studies
(refs, 4,6, and 103). Presently, the need exists to usher the method into practical real world appli-
cations. For this to take place, research on the AU method has to extend beyond feasibility studies.
As mentioned, a pmnary need has been a more sound physical basis for AU results. In fact, prior
to this dissertation, no general physical explanation for AU results in composite materials had been
offered. The theoretic'.d methods most often used for understanding results in aluminum plates are
impractical and in most cases impossible to apply to composite plates. IIence, it is the purpose of
this dissertation to provide a basic paradigm by which to understand the mechanics of the AU
method for composite materials. This stands to contribute to the application of the AU method
in the following ways:
Acceptance is based on physical understanding
Physical models allow forethought to be given to applications, so that proper instrumentation
is utilized and results can most appropriately be interpreted
Physical models may make it possible to understand how certain forms of damage may effect
AU results
212

Physicalmodelscanbeusedto interpret AU results in terms of the mechanical state of tile
material, and hence lead to NDE applications - the ulthnate goal of an NDT technique
Thus, tiffs dissertation is viewed as a building block in the maturation of the AU method imo an
NDE technique.
Experimental Work
A basic ingrcdicnt of this work is the use of expcrimcntal rcsults to guide physical understanding
and to validate thcorctical prcdictions. In fact, a largc part of the contribution of this work is the
painstaking mcasurcmcnts made to obtain tile experimental rcsults prescnted in chaptcr 4. More-
over, it is hoped that the cxpcrimcntal results presented here will provide thc basis for more ad-
vanced models and incrcascd basic physical experiraentation.
Physical Understanding
The basis of tile physical understanding of the AU method was the identification of higher order
lmnb waves as the dominaut mode of wave propagation. "]Iris involved comparing velocity
measurcmcnts and frcquency content of At/ measurcmcnts to Lamb wave theory predictions.
Additiontdly, thc variation of the input disturbance was shown to affect AU rcsults. An elasticily
solution was utilized to account for the angular dcpcndencc of the radial disturbance for a point
force input. "lhc radial variation of stress was then input to the Lamb wave solution. Thc fre-
quency content of lhc input was also shown to affect AU results and was accountcd for by multi-
plying the oulput spectrum by a fi'cqucncy dcpendcnt weighting function.
213

Currentphysicalunderstandingof theAU methodprovidesameansforexplainingexperimentally
observcdbchaviorof AU signalsfor compositematerials,includingthewaycertaincomponents
of thesignalvarywith_imuthalangle.
Onemajorcontributionhereis tileidentificationof whattypeofmotioneachfrequencycomponent
belongsto andwhatwavesorpartialwavescausethatmotion. Thishelpsunderstandphenomena
suchaswhythe.234Mltz signalcontentisof ahighenergyvaluein the90degreedirectionforthe
24plypanel. ']'his explains the slight increase scen in the overall energy content of the AU signal
at 90 degrees from lower values at 80 degrees (refs. 99 and 130).
Also, tile high radial disturbance for high angles in the fiber direction explains the large signal con-
tent in the beginning of the signal for the zero degree direction, due to the tfigher group velocity.
Specifically, tile fact that the fiber direction causes more energy to be directed at higher angles, re-
sults in more energy being present at higher wavenumbers where the group vclocity is of higher
value. The shape of the dispersion curve and energy flux also contribute, along with the higher
input energy, to the large A1 in the fiber direction. Also, this provides a means for relating how
the high modulus of the fiber pulls energy from the 15 degree direction, and hence causes such high
attenuation between the 1 and 2 inch distance for the 3rd order symmetric mode.
Additionally, the fact that the phase velocity is given by circular frequency over wave number ex-
plains why the higher frequency waves have higher phase velocity values than the lower frequency
waves. Thus, if one assumes the wave numbers are comparable, then the phase velocities should
be roughly the same ratio as the frequencies. This agrees with the experimental data for all the wave
components that are identified as higher order Lamb waves.
This physical description also provides a means for understanding certain aspects of the problem
with reproducibility. Specifically, the fact that the major mode of propagation seems to be waves
that are excited by stress waves sent off at just slightly off the normal means that a slight cantor of
the transducer (just a matter of a couple of degrees) could drastically effect how much energy is sent
214

in a givendirection.This couldexplainthenotedobservationthat thelargertransducerscause
muchmorerepeatableresultsthanthesmallertransducers-dueto themorestablestateof a large
diametertransducer.Moreover,thisobviatesthefactthatrepeatibilityismostdifficultira the fiber
direction- due to the fact that even more of the energy content is drawn in from the large angles.
Finally, the Lamb wave analysis provides a means of analyzing how damage and certain material
states may interact with wave motion. For instance, the stress state of a given Lamb wave mode
can be compared to known effects of damage on stress. Thus, a delamination could be treated as
a stress free boundary and then a wave could be excited that possessed a nonzero stress for that
position. Next, a Lamb wave could be excited that possessed the proper boundary condition or
most nearly (ie. the major stress field for that mode satisfy the boundary condition). Unfortunately,
existing data for the delamination signal contained two modes where the major stress met the stress
free boundary of the delamination, ttowever, these waves were still severely attenuated. Finally,
it is interesting to note that the initial application of the AU method involved determining shear
strength by using measurements in the 90 degree direction of unidirctional panels (ref. 4). The re-
suits of this work, combined with the physical explanation would predict that the dominant mode
in this case would be the 1st order antisymmetric mode. For the low wave number results seen in
experiments, this would show a wave that produced mainly shear stress in the direction the wave
was sent. Itence, the high resin areas that weaken the shear strength would also cause damping
of the shear stresses caused by the antisymmetric wave. Thus, the physical explanation forwarded
may be utilized in the future to identify the proper AU parameter to analyze, for a given type of
damage assessment and strength evaluation.
The importance of the damage position relative to the source must also be stressed. If the damage
is so close to the source that the Lamb wave is not yet excited, then attention should be centered
on how the stress waves emanating directly from the source may interact with the damage and how
that may affect the resulting Lamb wave. This again relates to the "grey area" of the geometry
problem associated with the region needed for the input plane waves to reflect and interact suffi-
215

cicntlyto causeLambwaves.In general,the physicalhlterpretationof theAU methodmust
acknowlegetheimportanceof thesourceandtheareacloseto sourcein AU results.
Implementation of A U
The implementation of the AU technique requires that reproducible, quick, inexpensive, and in-
formative measurements can be made on materials that are in structures. In order to achieve these
objectives, a number of advancements need to be made in separate areas.
Practical Difficulties
A number of practical difficulties need to be solved before the AU method can be fully utilized.
These involve simple type of concerns that need to be accounted for in transforming the lab ex-
pemnents into a working field method. Hopefully, some of the problems which may arise in this
transformation may be alleviated by the physical understanding forwardcd in this dissertation.
First, the digital calculations used in these experiments are too slow for many real applications.
I Iowever, an RMS voltmeter and a specified fdter may be utilized to obtain the energy" of a specified
mode that would give the proper infomaation. Obtaining the fight experimental hook-up could be
expedited by using calculations from the physical understanding forwarded in this dissertation.
One practical difficulty of the AU method is the reproducibility of results. The major reason is that
a slight reorientation in the direction of the transducer face drastically changes the energy input for
the dominate angles seen in tim AU signal, kaaother problem in this regard is the couplant. The
solution to this problem involves utilizing new experimental techniques and transducers, perhaps
216

laserexcitation.Ilowever,laserinputisnotveryeasyto characterize.In anycase,agreatdealof
attentionneedsto begivento viablesourcesandsensors.Also, complementary efforts should be
directed toward characterizing these sources and their mechanical interaction with materials.
In order for the AU method to receive mass utilization, the results need to be standardized and
must lead to easy interpretation. Although, early application of the method on thin specimens in-
dicated that a low AU energy value correlated to a low strength, the application of this idea to more
complex geometries of higher dimension with different material properties in different directions
causes this type of interpretation to become difficult. For instance, the effect of impact damage
has caused the AU energy to be redirected in certain directions, so that the AU energy was even
higher in these directions after damage than before, however, it may not be correct to interpret the
material as being stronger. Generally, damage may either attenuate or reflect energy- physically
understanding wave motion helps to interpret results of these mechanisms for help in standardi-
zation of the AU method.
One solution to the standardization and interpretation problem is to continue trying to relate the
mechanics of the AU technique to the mechanics of damage models. For instance, arrayed
transducers may be able to note a very localized alteration in directional material properties by
measuring Lamb wave velocities. This may then be compared to predicted changes by damage
models or conversely the material properties could be fed into damage models. Also, more effort
can be directed at relating actual energy attenuation in the AU signal to damage and then this in-
formation to damage model. Ultimately, only with increased modeling and computations can the
AU method be united with damage models to yield usable NDE methods for general application.
217

Instrumentation
A number of the problems which exist with the AU method may be solved by modifying instru-
mentation for specific applications, llence, a good deal of research needs to be directed at devel-
oping new AU systems. The following serve as a list of instrumentation that needs to be
developed:
Develop a system with RMS meter and capabilities for gating and faltering signal
Develop system for more repeatible characterized input that does not require a laborious op-
erator procedure
Develop a system that has a number of arrayed and multiplexed transducers that yields time
domain, frequency domain, and amplitude results
Develop real time computer analysis capabilities
Obviously, this is only a partial fist of possible ideas for developing the experimental means to use
the AU for real world applications, tlopefuUy, further ideas and work in this area will spawn from
the physical understanding of the AU method developed above.
Advanced Applications
Smart skins is one of many advance technologies that may benefit from progress being made in the
AU field. The basic goal of smart skin technology is to be able to simulate, for aircraft wings, the
activities of the central nervous system in human beings. Work in this area is focusing on the use
of optical fibers embedded in materials to sense the vibration of the material and to show damage
218

whenthefiberisbroken.Also, a good deal of concentration is centered on the great computational
effort associated with all the information.
AU may provide a way for checking the integrity of the material where there are not fibers, since
it would be highly impractical to have the optical fibers everywhere. In particular, a source, such
as KYNAR f_n, could be embedded at one location and the optical fiber at another location could
act as the receiver. Thus, the components could act to perform an in-situ AU test that could serve
the smart skin function of sensing pain from an abnormality in the material. Depending on the
sophistication of the software utilized, the severity of the damage, the location, and other variables
could be accounted for in order to make certain decisions and to give as much information as
possible. In general, the AU method may fred a niche in the smart skin technolgy.
Future Work
The basic physical model based on the elasticity solution, TTTR, and Lamb wave analysis opens
many doors for directions to complement this work and to further develop the AU method. A
partial list of future areas for possible research work includes:
Study of interdependence of parameters used in physical model
Develop self contained and efficient codes of computer model
Develop more complex models including effects of damage on wave dispersion and energy
dissipation
Use FE or FD to model the disturbance input by the transducer
219

Try to apply Vusedevan and Mal's approach, used on isotropic Lamb wave equations, to
anisotropic materials
Try to make predictions on which modes and which directions might be more affected by
various types of damage and to perform experimental validation
Use the model to develop better experimental set-ups
Do the full calculation of how AU varies with azimuthal angle including the effect of energy
flux (this will require using a lot of computer time on a super computer)
Alter model for use with other and more general experimental arrangements
Develop application of AU to smart skin technology
More work should be devoted to understanding the behavior of unidirectional panels at 15
degrees, this may help fred and evaluate fiber breaks
Expand analysis to more general laminates
Do fatigue test work and really try to correlate AU results and critical element model
All of these issues are topics that could be explored in great detail and would undoubtedly con-
tribute to the AU method and associated technology. In general, a great number of areas exist for
further research on the AU method, due to the newness of the method and its importance to new
technologies. Furthermore, now that the AU NDT method for composite materials has shown
experimental merits and a physical understanding of results exists, wise choices for further research
areas and proper approaches can be made.
220

Closing Remarks
A wealth of information is present in the AU signal. This information may be especially helpful,
when consideration is given to the variation of the AU signal with azimuthal angle for composite
materials and the great variation in local composite material state. Past research efforts have relied
on hit or miss experiments and complex signal analysis schemes to obtain as much information as
possible from AU analysis of composite materials. The physical understanding and modeling ef-
forts of this disertation are meant to add order to the search to obtain as much information as
possible from AU results.
The physics and wave propagation associated with this work are interesting in their own right. It
is interesting to note the great deal of information which can be ascertained from Lamb wave
analysis. Furthermore, it is fascinating to experimentally observe behavior qualitatively and
quantitatively predicted by analyzing dispersion curve information. This dissertation confirms the
usefulness of conventional theoretical tools for understanding experimentally observed wave mo-
tion. Also, this work points out the physics associated with the AU results in composite materials.
The physics shows the complex situations associated with trying to understand the basic mechanical
behavior of composite materials, ttopefuUy, this understanding may be of use in other areas of
research associated with composites.
This work highlights how source characteristics (frequency, orientation, etc.) and experimental ar-
rangement control waveguide effects, since all of these influence acoustic emission results, the same
complexities involved in AU analysis should be considered in understanding acoustic emission re-
sults. For instance, researchers in acoustic emission should be aware of the effects the orientation
of the AE source may have on what waves are set-up. Additionally, it points out the importance
of the receiver orientation (azimuthal angle) relative to the emission source on what results are de-
221

tected by the receiver. Also, it suggests that damage in the material between the acoustic emission
and the receiver may affect results.
In closing, the AU method shows promise as a means of assessing the quality of composite mate-
rims. With increased understanding of the physics associated with AU results, such as given here,
the application of the AU method for composite materials may further contribute to efforts to
nondestructively evaluate these materials in real applications. Thus, the purpose of this dissertation
is to contribute, through experimental data and wave motion analysis, a physical
understanding/model of the AU method for the purpose of developing a refined AU method for
use with advance composite material systems.
222

References
1. D.E. Newland, An Introduction to Ran-dom Vibrations and Spectral Analysis,Longman Inc., New York, (1983).
2. A. V. Oppenheim and R. W. Schafer,"Digital Signal Processing," Prentice-ttall,Inc., Englewood Cliffs, New Jersey, 1975.
3. J.D. Achenbach, "Wave Propagation inElastic Solids," American Elsevier, NewYork, NY., 1973.
4. A. Vary and K. J. Bowles, "UltrasonicEvaluation of the Strength ofUnidirectional Graphite/Polyimide Com-posites," NASA TM X-73646, 1977.
5. A. Vary and R. F. Lark, "Correlation ofFiber Composite Tensile Strength with theUltrasonic Stress Wave Factor," NASATM-78846, 1978.
6. A. K. Govada, J. C. Duke, Jr., E. G.Henneke II, "A Study of the Stress WaveFactor Technique for the Characterizationof Composite Materials," NASA CR17480, (1985).
7. R. Talreja, A. Govada and E. G.Hermeke, II, "Quantitative Assessment ofDamage Growth in Graphite/EpoxyLaminates by Acousto-Ultrasonic Meas-urements," Review of Progress in Quanti-tative Nondestructive Evaluation,Vol.3B, eds. D. O. Thompson and D. E.Chementi, Plenum Press, New York,(1984), pp. 1099-1106.
.
,
10.
11.
12.
13.
M. T. Kieman, "An Acousto-UltrasonicSystem for the Evaluation of CompositeMaterials" Masters Thesis, College of En-gineering, Virginia Polytechnique Instituteand State University, Blacksburg, Va.,Oct. (1986).
M. T. Kiernan and J. C. Duke,"Acousto-Ultrasonics as a Monitor of MaterialAnisotropy" Materials Evaluation, Vol. 46,No. 8, July 1988, p1105.
M. T. Kiernan and J. C. Duke,"PC Anal-ysis of an Acousto-Ultrasonic Signal"Materials Evaluation, Vol. 46, No. 10,Sept. 1988, p1344.
Y. Pao and R. K. Kaul, "Waves and Vi-brations in Isotropic and AmsotropicPlates," R. D. Mindlin and Applied Me-chanics, Pergamon Press Inc., New York,(1974), pp. 149-196.
R. C. Stiffler and E. G. Henneke, II, "LowFrequency Plate Wave Modes'in Ultra-sonic Stress Wave Characterization ofComposite Materials NASA ContractorReport 3976 under Grant NAG3-323, ed-ited by J. C. Duke, Jr., E. G. Hermeke II,and W. W. Stinchcomb, May (1986).
R. C. Stiffler, "Wave Propagation inComposite Plates" Phd. Dissertation,College of Engineering, VirginiaPolytechnical Institute and State Univer-sity, Blacksburg, Va., Nov. (1986).
223

14.
15.
16.
L. J. Johnson, "Green's Function forLamb's Problem," Geophysics, V. 37,1974, pp. 99-131.
S. O. Rice, "Matematical Analysis ofRandom Noise" Bell System TechnicalJournal Vol. 23, 1944, pp. 282-332, andVol.24, 1945, pp. 46-156. reprinted in Se-lected Papers on Noise and StochasticProcesses, ed. N. Wax, Dover, New York,1954.
P. M. Gammell, "Improved UltrasonicDetection Using the Analytic Signal Mag-nitude" Ultrasonics, March 1981, p. 73.
17. R. A. Kline and Z. T. Chen, "UltrasonicTechnique for Global Anisotropic Prop-erty Measurement in CompositeMaterials" Materials Evaluation 46, March1988, p. 986-992.
18. B. Itosten and Tittmann, "ElasticAnisotropy of Carbon-Carbon Compos-ites During the Fabrication Process,"IEEE Transactions of Ultrasonics,Ferroelectrics, and Frequency Control Vol.vffc-34, no. 3, May 1987.
19.
20.
21.
22.
23.
M. J. P. Musgrave, "Crystal Acoustics,"IIolden-Day, Inc., San Francisco, Ca.,1970.
F. I. Fedorov, "Theory of Elastic Wavesin Crystals," Plenum Press, San Francisco,Ca., 1970.
R. Halmshaw, "Non-destructive Testing,"Edward Arnold Publishers, London, 1987.
E. G. tlenneke, "Reflection and Refrac-tion of a Stress Wave at a Plane BoundaryBetween Anisotropic Media" Journal ofthe Acoustical Society of AtNerica, Vol. 51,1972, pp. 210-217.
E. G. Itenneke, "Critical Angles for Re-flection at a Liquid-Solid Interface in Sin-gle Crystals" Journal of the AcousticalSociety of America, Vol. 59, 1976, pp.204-205.
24. It. Kolsky, "Stress Waves in Solids,"Dover Publications, New York, NewYork, 1963.
25. A. Vary, "Concepts and Techniques forUltrasonic Evaluation of Material Me-
26.
27.
28.
29.
30.
31.
32.
chanic Properties'in Mechanics of Nonde-structive Testing, Ed. W. W. Stinchcomb,Plenum Press, 1980, pp. 123-141.
R. S. Sharpe, "Innovation and Opportu-nity in NDT" British Journal of Non-Destructive Testing 18, 4, 98, 1976.
L. E. Pitts, J. P. Thomas, and W. G.Mayer, "Theoretical Similarities ofRayleigh and Lamb Modes ofVibration,"in JASA, Vol. 60, pp374-377.
J. II. Ilemann and G. Y. Baaklini, "Effectof Stress on Ultrasonic Pulses in FiberReinforced Composites" Materials Analy-sis by Ultrasonics of Metals, Ceramics andComposites, Ed. A. Vary, Noyes DataCorporation, 1987, pp. 176-181.
L. S. Fu, "Dynamic Moduli and LocalizedDamage in Composites" Materials Analy-sis by Ultrasonics of Metals, Ceramics andComposites , Ed. A. Vary, Noyes DataCorporation, 1987, pp. 225-248.
J. II. Williams, Jr., ti. Nageb-tlashemi,and S. S. Lee, "Ultrasonic Attenuationand Velocity in AS/350 I-GGraphite/Epoxy Fiber Composite,"NASA CR-3180, Dec 1979.
J. II. Williams and B. Doll, "UltrasonicAttenuation as an Indicator of FatigueLife of Gr/Ep Composites," NASACR-3179, 1979.
G. Maze, J. L. Izibicki, J. Ripoche, A.Nagl, H. UberaU, and K. B. Yoo, "Tran-sient Acoustic Scattering from Layers andPlates ," JASA, Vol. 80, pp 295-301,1986.
33. A. Vary and K. J. Bowles, "Use of anUltrasonic-Acoustic Technique for Non-destructive Evaluation of Fiber CompositeStrength," NASA TM-73813, Feb. 1978.
34. A. Sarrafzdeh-Khoee, M. T. Kieman, J.C. Duke, Jr., E. G. ttenneke, II, "A Studyof the Stress Wave Factor Technique forNondestructive Evaluation of CompositeMaterials," NASA CR-4002, 1986.
35. A. Vary, "Correlations Among UltrasonicPropagation Factors and FractureTouglmess Properties of Metallic Materi-
224

als" Materials Evaluation 36, No. 7, June1978, p. 55-64.
36. A. Vary, "Quantitative Ultrasonic Evalu-ation of Mechanical Properties of Engi- 46.neering Materials," NASA TM-78905,June 1978.
37. W. H. Beyer, ed., CRC Standard Math- 47.ematical Tables, 26th edition, CRC Press,Boca Raton, FI., 1982.
38. D. M. Egle, "Using the Acoustoelastic 48.Effect to Measure Stress in Plates,"UCRL-52914, Lawrence Livermore Lab-oratory, 1980.
49.39. S. C. Cowin, V. Buskirk, and R. Carter,
"A Theory of Acoustic Measurement ofthe Elastic Constants of a AnisotropicSolid," in Proceedings of 1986 SEMSpring Conference, New Orleans, LA,1986, pp 737-745.
40. R.A. Kline, "Wave Propagation in FiberReinforced Composites for Oblique Inci- 50.dence" Journal of Composite Materials,Vol. 22, March 1988, pp. 287-303.
41. S. T. Rokhlin, T. Bolland, and L. Adler,"Reflection and Refraction of Elastic 51.Waves on a Plane Interface Between TwoGenerally Anisotropic Media," Journal ofAcoustic Society of America, 79, 1986, pp.906-919.
42. J. E. Zimmer, and J. R. Cost, "Determi- 52.nation of the Elastic Constants ofUnidirectional Fiber Composites UsingUltrasonic Velocity Measurements," Jour-nal of Acoustic Society of America, 41,1970, pp. 795-799.
43. K. L. Reifsnider and W. W. Stinchcomb,"A Critical-Element Model of the Resi-dual Strength and Life of Fatigue-LoadedComposite Coupons," in Composite Ma-terials : Fatigue and Fracture ASTM STP907, H. T. Hahn Ed., ASTM,Philadelphia, 1986, pp. 298-313.
44. L.J. Broutman and S. Sahu, "Composite 55.Coupons," in Materials : Testing and De-sign Second Conference, ASTM STP 497,ASTM, Philadelphia, 1972, pp. 170-188,
45. J. C. Halpin, T. A. Johnson, and M. R.Waddoups, "Between Two Generally
Anisotropic Media," International Journalof Fracture Mechanics, Vol. 8, 1972, pp.465-472.
H. T. Itahn, and R. Y. Kim, Journal ofComposite Materials, Vol. 9, 1975, pp.297-311.
H. T. Hahn, and R. Y. Kim, Journal ofComposite Materials, Vol. 10, 1976, pp.156-179.
Z. Hashin and A. Rotem, Materials Sci-ence and Engineering, Vol. 34, 1978, pp.147-179.
J. H Williams, Jr., Karaguelle, and S. S.Lee, "Ultrasonic Input-Output for Trans-mitting and Receiving LongitudinalTransducers Coupled to the Same Face ofan Isotropic Elastic Plate," MaterialsEvaluation Vol. 40, No. 6, May 1982, pp.655-662.
R. E. Green, Jr., "Ultrasonic Investigationof Mechanical Properties"inVol. 3 ofTreatise of Materials Science and Tech-nology, Academic Press, New York, 1973.
J. C. Peck and G. A. Gurtman,"Dispersive Pulse Propagation Parrallel tothe Interfaces of a Laminated
Composite," J. of Applied Mech., 36, 479,1969.
R. D. Mindlin, "Waves and Vibrations inIsotropic, Elastic Plates" Structural Me-chanics, New York, 1960, pp. 199-232.
53. F. R. Breckenridge, C. E. Tschiegg, andM. Greenspan, "Some Applications oflamb's Problem" JASA,57, (3),
pp626-631, March 1975.
54. H. KaragueUe, J. H, Williams, Jr., and S.S. Lee, "Stress Waves in Isotropic ElasticPlate Excited by Circular Transducers,"Materials Evaluation, 44, March 1986, pp.455-462.
G. F. Miller and H. Pursey, "The Fieldand Radiation Impedance of MechanicalRadiators on the Free Surface of a Semi-infinite Isotropic Solid," Proceedings ofthe Royal Society of London, Series A,Vol. 223, May 1954, pp 521-541.
225

56. J. H. Williams, Jr. and N. R. Lampert,"Ultrasonic Evaluation of Impact-Damaged Graphite Fiber Composite,"Mtls. EvaL, Vol. 38, No. 12, Dec. 1980,pp 68-72.
57. Y. tt. Pao and R. R. Gajewski, "TheGeneralized Ray Theory and TransientResponses of Layered Elastic Solids,"Physical Acoustics, eds. W. P. Mason andR. N. Thurston, Academic Press, NY.NY., Vol. 13, 1977, pp. 183-265.
58. H. Lamb, "On Waves in an ElasticPlate," Proceedings of the Royal Societyof London, March 1917.
59. D. C. Worlton, "Lamb Waves at Ultra-sonic Frequencies," ttW-60662, June1959.
60. C. L. Frederick and D. C. Worlton, "Ul-trasonic Thickness Measurements withLamb Waves" Nondestructive TestingJan.-Feb. 1962, pp51-55.
61. T. N. Grisby and E. J. Tajctmaan, "Prop-erties of Lamb Waves Rclevent to the UI-trasonic Inspection of Thin Plates," IRETrans. of Ultrasonics Eng., March 1961,Vol. VE-8, No. 1, pp 26-33.
62. R. A. DiNovi, "Lamb Waves and TheirUse in Nondestructive Testing,"ANL-6630, March 1963.
63. II Karaguelle, J. l-t. Williams, and S. S.Lee, "Application of I lomomorphic Sig-nal Processing to Stress Wave FactorAnalysis" Mtls. Eval. Vol. 43, Oct. 1985,pp 1446-1454.
4. R. E. Green, Jr., "Ultrasonic Nondestruc-tive Materials Characterization" AnalyticalUltrasonics in Materials Research andTesting, cd. A. Vary,NASA ConferencePublication 2383, 1986.
65. J. S. Heyman and M. Namkung, "Resi-dual Stress Measurements in CarbonSteel" Analytical Ultrasonics in MaterialsResearch and Testing, ed. A. Vary,NASAConference Publication 2383, 1986.
66. O. Buck, R. B. Thompson, and D. K.Rehbein, "On the Interaction ofUltrasound With Cracks: Applications toFatigue Growth" Analytical Ultrasonics in
67.
68.
69.
70.
71.
72.
73.
74.
Materials Research and Testing, ed. A.Vary, NASA Conference Publication 2383,1986.
E. G. tlermeke, II and J. C. Duke, Jr. ,"Analytical Ultrasonics for Evaluation ofComposite Materials Response: Pt. IPhysical Interpretation" Analytical Ultra-sondes in Materials Research and Testing,ed. A. Vary,NASA Conference Publica-tion 2383, 1986.
J. C. Duke, Jr. and E. G. Itenneke, II,"Analytical Ultrasonics for Evaluation ofComposite Materials Response: Pt. IIGeneration and Detection" Analytical Ul-trasonics in Materials Research and Test-ing, ed. A. Vary,NASA ConferencePublication 2383, 1986.
J. A. G. Temple, "Modelling the Propa-gation and Scattering of Elastic Waves inlnhomogeneous Anisotropic Media," Tobe submitted to the J. Phys.
J. C. Duke, Jr. and M. T. Kieman, "hn-pact Damage Development in DamagedComposite Materials," Proceedings of the4th US-Japan Conference on CompositeMaterials, Amcrican Society of Compos-ites, Dayton, 1988.
R. B. Thompson, J. F. Smith and S. S.Lee, "Inference of Stress and TextureFrom Angular Dependence of UltrasonicPlate Mode Velocities" Analytical Ultra-sonics in Materials Research and Testing,ed. A. VarT,NASA Conference Publica-tion 2383, 1986.
A. Wieczorek and G. Schmitz, "Develop-ment of Nondestructive Testing MethodsFor The Evaluation of Thin and UltrathinSheet Materials" AFML-TR-65-320, Dec.,1965.
I. Tolstoy and E. Usdin, "Wave Propa-gation in Elastic Plates: Low and ttighMode Dispersion" JASA, 29, pp. 37-42,1957.
A. Vary and tt. E. Kautz, "TransferFunction Concept for Ultrasonic Charac-terization of Material Microstructures"Analytical Ultrasonics in Materials Re-search and Testing, ed. A. Vary,NASAConference Publication 2383, 1986.
226

75. Y. II. Pao,W. SachseandIt. Fukuoka,"Acoustoelasticityand UltrasonicMeas-urementsof ResidualStresses"In Vol.XVII Physical Acoustics, W. P. Masonand R. N. Thurston (eds.), AcademicPress, Orlando, Fla., (1984) pp61-143.
84.76. M. Rosen, "Analytical Ultrasonics for
Characterization of Metallurgical Micro-structures and Transformations" Analyt-ical Ultrasonics in Materials Research andTesting, ed. A. Vary,NASA ConferencePublication 2383, 1986.
77. S. J. Klima and G. Y. Baaklini, "Ultra- 85.sonic Characterization of Structural Ce-ramics" Analytical Ultrasonics in MaterialsResearch and Testing, ed. A. Vary,NASAConference Pubfication 2383, 1986.
78. D. R. Allen, H. B. Cooper, C. M. Sayersand M. G. Silk, "The Use of Ultrasonics 86.to Measure Residual Stresses," in Re-search Techniques in Nondestructive Test-ing, Vol. VI, ed. R. S. Sharpe, AcademicPress, NY., 1982
79. S. O. Harold, "Ultrasonic Focusing Tech- 87.niques," in Research Techniques in Non-destructive Testing, Vol. VI, ed. R. S.Sharpe, Academic Press, NY., 1982
80. L.W. Schmerr, Jr., "Ultrasonic Scattering 88.hi Composites Using Spatial FourierTransform Tectmiques," Review ofProgress in Quantitative NondestructiveEva&ation, VoL4A,eds. D. O. Thompsonand D. E. Chementi, Plenum Press, NewYork, (1985), pp. 53-60
81. D. K. Rehbein, R. B. Thompson and O. 89.Buck, "Interaction of Ultrasonic Waveswith Simulated and Real Fatigue Cracks,"Ren,iew of Progress in Quantitative Nonde-structive Evaluation, VoL4A,eds. D. 0.Thompson and D. E. Chementi, PlcnumPress, New York, (1985), pp. 61-82
90.82. Y. C. Angel and J. D. Achenbach, "Re-
flection of Ultrasonic Waves by an Arrayof Microcracks ," Review of Progress inQuantitative Nondestructive Evaluation, 91.VoL4A,eds. D. O. Thompson and D. E.Chementi, Plenum Press, New York,(1985)
92.83. E. R. Generazio, "The Role of the Re-
flection Coefficient in Precision Measure-
ment of Ultrasonic Attenuation," Reviewof Progress in Quantitative NondestructiveEvaluation, Vol.4B, eds. D. O. Thompsonand D. E. Chementi, Plenum Press, NewYork, (1985)
B. W. Reed, "A Iligh Precision UltrasonicVelocity and Attenuation Measurementof Lamb Waves in Anisotropic Plates,"Review of Progress in Quantitative Nonde-structive Evaluation, VoL4B, eds. D. 0.Thompson and D. E. Chementi, PlenumPress, New York, (1985)
E. G. Itenneke, II, J. C. Duke, Jr., W.W. Stinchcomb, A. Govada, and A.Lemascon, "A Study of the Stress WaveFactor Technique for the Characterizationof Composite Materials," NASACR-3670, 1983.
C. J. Rebello and J. C. Duke, Jr. "FactorsInfluencing the Ultrasonic Stress WaveFactor Evaluation of MaterialStructures," J. of Comp. Tech. and Re-search 8, 18, 1986.
A. Vary, "The Acousto-ultrasonic Ap-proach ," Acousto-Ultrasonics : Theoryand Application eds. J. C. Duke, PlenumPress, New York, (1988), pp. 1-22.
A. Govada, E. G. ltenneke, II, and R.Talreja, "Acousto-ultrasonic Measure-ments to Monitor Damage During Fatigueof Composites," in 1984 Advances inAerospace Sciences and Engineering, eds.V. Yuceoglu and R. Itesser, ASME, NY,1984.
B. Tang, E. G. Ilenneke, II, and R. C.Stifflcr, "Low Frequency Flexural WavePropagation in Laminated CompositePlates," Acousto-Ultrasonics ." Theory andApplication eds. J. C. Duke, Plenum Prcss,New York, (i988), pp. 45-66.
W. A. Green, "Bending Waves in StronglyAnisotropic Elastic Plates" Quarterly J. ofMech. and Appl. Math. 35, 485, 1982.
A. Vary, "Acousto-ultrasonicCharacteriztion of Fiber Reinforced Com-posites," Mtls. Eval., 40, 650, 1982.
M. Schoenburg, "Elastic Waves BehaviorAcross Linear Slip Interface," J. of Acous-tic Soc. Am., 68, 1516, 1980.
227

93. S.K. Datta,"A Self-ConsistentApproachto MultipleScatteringof ElasticWaves,"J. Appl. Mech., 44, p657, 1986.
94. M. Billy, L. Adler, and G. Quentin,"Measurements of Backscattered Lc',_kyI,amb Waves in Plates," J. Acoust. Soc.Amer., 75, 998, 1984.
95. S. M. Moon, K. L. Jerina, and II. T.llahn, "Acousto-Ultrasonic Wave Propa-gation in Composite Laminates ,"Acousto- Ultrasonics ."Theory and Applica-tion eds. J. C. Duke, Plenum Press, NewYork, (1988), pp. 111-126.
96. R. L. Weavcr, "Diffuse Waves in FinitePlates," J. Sound and Vib., 94, p 319,1984.
97. II. E. Kautz, "Ray Propagation PathAnalysis of Acousto-Ultrasonic Signals inComposites," Acousto-Ultrasonics : The-ory and Application eds. J. C. Duke, Ple-num Press, New York, (1988), pp.
98. R. Roberts, J. Qu and J. D. Achenbach,"Experimental and Theoretical Analysisof Backscattering Mechanisms in Fiber-Rehfforccd Composites," Acousto-Ultrasonics : Theory and Application eds.J. C. Duke, Plenum Press, New York,(1988), pp. 151-164
99. R. Talreja, "Application of Acousto-Ultrasonics to Quality Control and Dam-age Assessment of Composites,"Acousto-Ultrasonics : Theory and Applica-tion eds. J. C. Duke, Plenum Press, NewYork, (1988), pp. 177-190.
100. J. C. Duke and M. T. Kieman, "Predict-hag Damage Development in CompositeMaterials Based on Acousto-UltrasonicEvaluation," Acousto-Ultrasonics : Theoryand Application eds. J. C. Duke, PlenumPress, New York, (1988), pp. 191-200.
101. J. D. Leaird and M. C. Kingdon, "Con-siderations for Devcloping CalibrationStandards for Acousto-Ultrasonic In-
spection," Acousto-Ultrasonics : Theoryand Application eds. J. C. Duke, PlenumPress, New York, (1988), pp. 247-258.
102. J. H. Ilemann, P. Cavano, II. Kautz andK. Bow!es, "Trans-Ply Crack DensityDetection By Acousto- Ultrasonics,"
Acousto-Ultrasonics : Theory and Applica-tion eds. J. C. Duke, Plenum Press, NewYork, (1988), pp. 319-326.
103. K. K. Phani and N. R. Rose, "Applica-tion of Acousto-Ulatrasonics for Predict-ing ttygrothermal Degradation,"Acousto-Ultrasonics : Theory and Applica-tion eds. J. C. Duke, Plenum Press, NewYork, (1988), pp. 327-336.
104. P. J. Torvik, "Shock Propagation in aComposite Material," J. Comp. Mils., Vol.4, 1970, p296.
105. D. Frederick, "Continuum Mechanics,"Cambridge Pub., Cambridge Mass., 1963.
106. C. D. Lundergan and D. S. Drumhelker,"Propagation of Stress Waves in a I_mni-nated Plate Composite" J. Appl. Phys.,Vol. 42, No. 2, Feb. 1971.
107. It. J. Suthcrland and R. Lingle, "Ge-ometric Dispersion of Acoustic Waves bya Fibrous Composite" J. of CompositeMtls., Vol. 6, Oct. 1972, p. 490.
108. A. Poursartip and P. W. R. Beaumont,"A Damage Approach to the Fatigue ofComposites" Nonlinear Behavior of Com-posite Mtls. ASME, AMD-Vol. 13, pp.93-103, 1975.
109. K. L. Reifsnider, E. G. Itenneke, II, W.W. Stinchcomb, and J. C. Duke, "DamageMechanics and NDE of Composite Lam-inates," Mechanics of CompositeMaterials: Recent Advances ed. Z. ttashinand C' T. I terokovich, Pergamon Press,1982, pp. 399-420.
110. E. P. Papadalds, "Ultrasonic TransducerEvaluation in Five Domains: Time, Space,Frequency, Surface Motion, and Theory"1977 Ultrasonics Symposium ProceedingsIEEE Cat. 77Ctt1264-150.
111. R. J. Nuismer and S. C. Tan, "The Roleof Matrix Cracking in the ContinuumConstitutive Behavior of a DmnagedComposite Ply," Mechanics of Comp.Mtls. P437-448.
112. J. H. Williams, Jr., E. B. Kahn, and S. S.Lee, "Effects of Specimen Resonances onAcousto-ultrasonics" Mtls. EvaL, 41, p1502, 1983.
228

113. II. Ekstein, "tligh Frequency Vibrationsof Thin Crystal Plates," in Phys. Rev., 68,1945, pp. 11-23.
114. T. K. O'Brien, "Characterization of De-lamination Onset and Growlh in a Com-
posite Laminate,"in Damage in CompositeMaterials ASTM STP775, 1982.
115. B. A. Auld and M. Tan, "SymnmtricalI_amb Wave Scattering at a SymmetricalPair of Thin Slots," 1977 UltrasonicsSymposium Proceedings, IEEE Cat.#77Ct11264-150, pp 61-66.
116. C. A. Ross, L. E. Ross, L. E. Malvern,R. L. Sierakowsli, and N. Takeda,"Finite-Element Analysis of InterlaminarShear Stress Due to Local Impact," inRecent Advances in Composites in theUnited States and Japan, ASTM STP864,J. R. Vblson and M. Taya eds., ASTM,Phil. 1985, pp. 355-367.
117. S. P. Joshi and C. T. Sun, "Impact-Induced Fracture in a Quasi-IsotropicLaminate," J. of Comp. Tech. andRes.,Vol. 9, No. 2, Sum. 1987, pp. 40-46.
118. F. C. Moon, "Wave Surfaces Due to Im-pact on Anisotropic Plates," J. of Comp.Mtls., Vol. 6, Jan. 1972, pp 62-79.
119. C. T. Ilerakovich, "On the RelationshipBetween Engineering Properties and De-lamination of Composite Materials" J. ofComp. Mtls., Vol. 15, July 1981, pp336-348.
120. A. Vary, "Ultrasonic Measurement ofMaterial Properties" in Research Tech-niques in Nondestructive Testing l V ed. R.S. Sharpe, Acad. Press, NY., 1980, pp.159-204.
121. A. N. Ceranoglu and Y. H. Pao, "Propa-gation of Elastic Pulses and AcousticEmission in a Plate," ASME J. of Appl.Mech., 48, 1981, pp. 125-147.
122. Y. ti. Pao, R. R. Gajewski, and A. N.Ceranoglu, "Acoustic Emission and Tran-sient Waves in an Elastic Plate," J. Acoust.Soc. of Am., 65(1), 1979, pp. 96-105.
123. R. M. Jones, Mechanics of CompositeMtls. McGraw-Itill, New York, 1975.
124. J. M. Whitney Structural Analysis ofLaminated Anisotropic Plates, TechnomicPub., Lancaster, Pa., 1987.
125. R. Plunkett, "Damping Mechanisms inFiber Reinforced Laminates" Mechanics
of Composite Materials: Recent Advances.ASME, AMD-Vol. 13, pp. 93-103, 1975.
126. R. M. Christensen,. Theory ofViscoelasticity Academic Press, NY, 1982.
127. L. P. Solie and B. A. Auld, "Elastic Wavesin Free Anisotropic Plates" The .lour. ofAcoust. Soc. of Am., Vol. 54, No. 1, 1973.
128. R. D. Kriz and W. W. Stinchcomb,"Elastic Moduli of Transvcrsely IsotropicGraphite Fibers and Their Composites"Experimental Mechanics, Vol. 19, No. 2,Feb. 1979, pp 41-49.
129. N. Vasudevan and A. K. Mal, "Responseof an Elastic Plate to Surface Loads andBuffed Dislocation and Sources," Reviewof Progress in Quantitative NondestructiveEvaluation, Vol.4A,cds. D. O. Thompsonand D. E. Chementi, Plenum Press, NewYork, (1985), pp. 53-60
130. J. C. Duke, Jr., E. G. Ilcrmeke, II, M. T.Kiernan, and P. P. Grosskopf, "A Studyof the Stress Wave Factor Technique forEvaluation of Composite Materials (In-terim Report-IV)," CR-4178.
131. S. T. Bartlett, "Nondestructive Evaluationof Complex Geometry Advanced MaterialMaterial Components" Masters Thesis,College of Engineering, VirginiaPolytcchnique Institute and State Univer-sity, Blacksburg, Va., April (1989).
132. I. A. Viktrov, "Rayleigh and LambWaves," New York, 1967.
133. N. N. tlsu and F. R. Breckenridge,"Characterization and Calibration ofAcoustic Emission Sensors" Mtls. Evat,
Vol. 39, No. 1, pp. 60-68.
134. P. M. Egle and A. E. Brown, "Consider-ations for the Detcction of AcousticEmission Waves in Thin Plates," JASA,
12 (1), pp. 140-146, 1975.
229

135.J. KrautkramerandIt. Krautkramer,Ul-trasonic Testing of Materials, 2nd Edition,Springer Verlag, New York, 1969.
136. S. I. Rokhlin, "Adhesive Joint Evaluationby Ultrasonic Interface and LambWaves" Analytical Ultrasonics in MaterialsResearch and Testing, ed. A. Vary,NASAConference Publication 2383, 1986.
137. A. Vary, "Acousto-ultrasonics: AnUpdate" Proceeding of Journal of AcousticEmission, Vol. 8, No. 1-2, pp. 175-178,1989.
138. tI. J. Pain, The Physics of Vibrations andWaves, John Wiley and Sons, New York,1983.
139. C. A. Coutson and A. Jeffrey, "Waves: AMathematical Approach to the CommonTypes of Wave Motion," Longman Inc.,New York, 1977.
140. Mme S. Claes, "La Forme des Signaux d'Emission Acoustique et Leur Role dansles Essais de Localisation" Journeesd'Etudes sur rEmission Acoustique, pp.215-301, March 15, 1975.
141. ti. J. Filmore, 7"he Physics of Wave Mo-tion, Jotm Wiley and Sons, New York,1983.
142. J. N. Goodier and R. E. D. Bishop, "ANote on Critical Reflection of ElasticWaves at Free Surfaces" J. of AppliedPhysics, 23, 1952, pp 124-126.
143. M. A. Majeed and C. R. L. Murthy, "AnEfficient Unsupervised Pattern Recogni-tion Proccdure for Acoustic Emission Sig-nal Analysis" Proceeding of Journal ofAcoustic Emission, Vol. 8, No. 1-2, pp.16-19, 1989.
144. II. L. M.dos Reis, "Acousto-Ultrasonics:Applications to Wire Rope, Wood Fiber|Iardwood, and Adhesion," Acousto-Ultrasonics : Theory and Application eds.J. C. Duke, Plenum Press, New York,(1988), pp. 283-300.
145. A. Mittelman, I. Roman, A. Bivas, I.Leichter, J. Y. Margulies, and A. Weinreb,"Acousto-Ultrasonics Characterization of
Physical Properties of tluman Bones,"A cousto- Ultrasonics : Theory and Applica-
tion eds. J. C. Duke, Plenum Press, NewYork, (1988), pp. 305-310.
146. A. Madhav and J. A. Nachlas, "StatisticalEvaluation of Quality ha Composites Us-ing the Stress Wave Factor Technique,"A cousto- Ultrasonics : Theory and Applica-tion eds. J. C. Duke, Plenum Press, NewYork, (1988), pp. 165-176.
147. G. S. Kino, Acoustic Waves: Devices, Im-aging, and Analog Signal ProcessingPrentice-ItaU, Inc., Englewood Cliffs, NewJersey, 1988.
148. R. L. Weaver, "Diffuse Waves for Mate-rials NDE ," Acousto-Ultrasonics : Theoryand Application eds. J. C. Duke, PlenumPress, New York, (1988), pp. 35-44.
149. W. W. Stinchcomb, K. L. Reifsnider, L.A. Marcus, and R. S. Williams, "Effectsof Frequency on the Mechanical Responseof Two Composite Materials to FatigueLoads," Fatigue of Composite Materials,ASTM STP 569, 1975, pp 115-129.
150. L. R. Testardi, S. J. Norton, and T. Hsieh,"Determination of Inhomogeneities ofElastic Modulus for One DimensionalStructures Using Acoustic DimensionalResonances" Preprint
151. S. G. Lekhnitsldi, Theory of Elasticity ofan Anisotropic Body, Mir Publishers,Moscow, 1981.
152. J. S. Ileyman, "Phase InsensitiveAcoustic-electric Transducer," JASA, V.64, 1978, pp 243-249.
153. W. J. Pardee, "Acoustic Emission and thePlate Green's Function," J. MathematicalPhysics V. 18, 1977, pp. 676-686.
154. S. P. Timoshenko and J. N. Goodier,Theory of Elasticity, McGraw-tlill, NY,1934.
155. T. M. Proctor, Jr., "An ImprovedPiezoelectric Acoustic EmissionTransducer," JASA, 71, 1982, pp.1163-1168.
156. G. C. Sih and E. P. Chen, "SuddenStretching of a Four-Layered CompositePlate," Engineering Fracture Mechanics,No. 1-2, 1981, pp. 243-252.
230

157. PC-DAS User, s Manual General Re-search Corporation, McLean, Va., 1985.
158. Instruction Manual for Ultrasonic AnalyzerModel 5052 UA, Panametrics, Waltham,Mass.
159. A. Sarrafzadeh-Khoee and J. C. Duke,"Small In-Plane/Out of Plane displace-ment Measurement Using Laser-SpeckleInterferometry," Experimental Techniques,18: 18, 1986.
160. A. Sarrafzadeh-Khoee and J. C. Duke,"Noncontacting Detection in UltrasonicNondestructive Evaluation of Materials:Simple Optical Sensor and Fiber Opticlnterferometric Application," Review ofScientific Instrumentation, 57:2321, 1986.
161. A. Sarrafzadeh-Khoee, R. J. Churchill,M. G. Niimura, "Laser GeneratedUltrasound," A cousto- Ultrasonics : Theoryand Application eds. J. C. Duke, PlenumPress, New York, (1988), pp. 201-207.
162. W. W. Duley, Laser Processing and Anal-ysis of Materials, Plenum Press, NY, 1983.
163. J. H. Williams and P. Liao, "PreliminaryEvaluation of Non-Contact Acousto-
Ulrasonic Displacement Fields inPolymeric Matrix Composite," Acousto-Ultrasonics : Theory and Application eds.J. C. Duke, Plenum Press, New York,(1988), pp. 67-78.
164. A. Pilarsld, J. L. Rose, K.Balasubramaniam, and J. Da-Le, "Utili-zation of Oblique Incidence in Acousto-Ulrasonics," Acousto- Ultrasonics : Theoryand Application eds. J. C. Duke, PlenumPress, New York, (1988), pp. 67-78.
165. KYNAR Piezoelectric Film TechnicalManual, Pennwalt Corp., 1983.
166. J. A. Bunk, C. J. Valenza, and M. C.Bhardwaj, "Applications and Advantagesof Dry Coupling Ulrasonic Transducersfor Materials Characterization and In-
spection," Acousto-Ultrasonics : Theoryand Application eds. J. C. Duke, PlenumPress, New York, (1988), pp. 221-238.
167. M. Patton-Mallory and K. D. Anderson,"An Acousto-Ultrasonic Method forEvaluating Wood Products," Acousto-Ultrasonics : Theory and Application eds.J. C. Duke, Plenum Press, New York,(1988), pp. 301-304.
231

Appendix A. (ORIN.FOR)- fortran program
Appendix A. (ORIN.FOR)- fortran program
232

*****Program to compute variation of disturbance *************with angle theta as a result of force on a composite************half space in fiber and cross fiber direction *******
CHARACTER*J2 DIFF
COMPLEX A(2),B(2),C(2),D(2),U(2),V(2),SGP(2)DIMENSION S(6,6),RL(2),SG(2),AMP(2)WRITE(*,*) " FILENAHE FOR OUTPUT"READ(*,*) DIFFOPEN (UNIT-g,FILE-DIFF)PI-3.1456E]12I.E6E2-!_4E6V]2=.3GI2=.B5E6G23-.5E6
V23=.5*E2/G23-1V2]=E2/EI*V12VI3-VI2E3=E2
S(I,I)=I/EIS(I,2)--V12/EIS(],3)--vIa/EIS(Z,2)-1/E2$(2,3)=-V231E2S(3,3)-1_E3$(4,4)-1/G23S(S,S)-WGZ2$(6,6)-]/G12DO 30 IF-l,6DO 25 IJ-l,6WRITE(*,*) S(IF,IJ)
25 CONTINUE30 CONTINUE
A(I)-CMPLX(S(I,I),O.)B(1)-CMPLX(-(2.*S(I,3)+S(5,5)),O.)C(1)-CMPLX(S(3,3),O.)A(2)-CMPLX(S(2,2),O.)B(2):CMPLX(-(2.*S(2,3)+S(4,4)),O.)C(2)=CMPLX(S(3,3),O.)D(1)_CSQRT(B(1)*B(1)-CMPLX(4.,O.)*A(1)*C(I))D(2)=CSQRT(B(2)*B(2)-CMPLX(4.,O.)*A(2)*C(2))U(1)=CSQRT((-B(1)+D(I))/(CMPLX(Z.,O.)*A(1)))U(2)ICSQRT((-B(2)+D(2))/(CMPLX(2.,O.)*A(2)))
V(I)=CSQRT((-B(I!-D(]))/(CMPLX(2.,O.)*A(])))V(2)=CSQRT((-B(2)-D(2))/(CMPLX(2,0.)*A(2)))DO I00 I-1,91K-I-1RK-FLOAT(K)REK=RK*PI/]80.CS-COS(REK)SN-SIN(REK)WRITE(*,*) CS,SNRL(I)-S(I,I)*SN**4+(2.*S(I,3)+S(S,5))*SN**2*CS**2
++S(3,3)*CS**4RL(2)-S(2,2)*SN**4+(2.*S(2,3)+S(4,4))*SN**2*CS**2
++S(3,3)*CS*'4WRITE(*,*) RL(1),RL(2)SGP(1)-U(1)+V(1)SGP(2)-U(2)+V(2)
Appendix A. (ORIN.FOR)- fortran program
233

90100990995
SG(1)-SGP(1)SG[2)-SGP(2)SG(1).SG(1)*(S(I,I)*S(3,3))**.B*CS*CS/RL(I)SG(2).SG(2)*(S(2,2)*S(3,3))**.5*CS*CS/RL(2)IF(I.EQ.I)AMP(I)-SG(I)IF(I.EQ.I)AMP(2)-SG(2)SG(I)-SG(])/AMP(1)SG(2}_SG(2)/AMP(2)WRITE(9,90)RK, SG(1), SG(2)FORMAT(3EIS.5)CONTINUESTOPEND
Appendix A. (ORIN.FOR)- forlran program
234

Appendix B. (GEIN.FOR)- fortran program
Appendix B. (GEIN.FOR)- fortran program
235

CHARACTER*f2DIFF
COMPLEXA(2),B(2),C(2),D(2),U(2),V(2),SGP(2)DIMENSION S(6,6),SS(6,6),GL(3),TL(4,3),EM(3),WRITE(*,*) " FILENAME FOR OUTPUT"READ(*,*) DIFFOPEN (UNIT=9,FILE=DIFF)PI=3.1456EI=21.E6E2-I.4E6V12-.3GI2=.B5E6G23=.SE6V23=.5*E2/G23-]V21=E2/EI*VI2VI3-V12E3-E2
SS(I,i)-]IEISS(I,2)--VI2/EISS(I,3)--VI3/EISS(2,2)-I/E2SS(2,3)m-V23/E2SS(3,3)=I/E3SS(4,4)-I/G23SS(S,S).]/G12SS(6,6)=I/G12WRITE(*,*) 'INPUT AZIMUTHAL ANGLE'READ(*,*) AZDO 200 ITH=I,gOTH-FLOAT(ITH)DATA AR(6,6)/36"0./SN-SIN(AZ)CS=COS(AZ)AR(],])-CS**2AR(I,2)-SN**2AR(],6)-CS*SNAR(2,I)=SN**2AR(2,2)=CS*'2AR(2,6)=-SN*CSAR(3,3)=].AR(4,4)=CSAR(4,5)--SNAR(5,4)-SNAR(5,5)-CSAR(6,1)=-2.*SN*CSAR(6,2)=2.*SN*CSAR(6,6)=CS**2-SN**2DO 10 I=],6DO 10 J=lj6DO ]0 M-I,6DO ]0 N-1,6S(I,J)-SS(M,N)*AR(I,M)*AR(J,N)
IO CONTINUE
SA=S(I,I)SB--2.*S(],6)SC-2.*S(1,6)+S(6,6)SD--2.*S(2,6)
Appcndix B. (GEIN.FOR)- fortran program
236

SE-S(2,2)SF-S(5,5)SG'-2.*S(4,5)
SI'S(],S)SJ--(S(1,4)+S(5,6))SK'S(2,5)+S(4,6)SL--S(2,4)TA'SA*SF-SI*SITB-SB*SF+SA*SG-2.*SI*SJTC-SC*SF+SB*SG+SA*SH-SJ*SJ-2.*SI*SKTD:SD*SF+SC*SG+SB*SH-2.*SK*SJ'2.*SL*SlTE:SE*SF+SD*SG+SC*SH-2.*SJ*SL'SK*SKTF'SE*SG+SD*SH-2.*SK*SLTG'SE*SH-SL*SLA'TB/TAB'TC/TAC'TD/TAD'TE/TAE'TF/TAF'TG/TA
:%%%%%%%%%%%%%%%%%%%%%%CALLSUBROUTINE OR INPUT USING SEPARATE SOURfWRITE(*,*) A,B,C,D,E,FDO 20 I-1,3WRITE(*,*) "PUT IN MU VALUES"WRITE(*,*) IREAD(*,*) EM(1)
20 CONTINUEDO 30 I-1,3TL(2,I)-SF*EM(1)**2+SG*EM(1)+SHTL(3,1)-SI*EM(1)**3+SJ*EM(1)**2+SK*EM(1)+SLTL(4,1)-SA*EM(1)**4+SB*EM(1)**3+SC*EM(1)**2+SD*EM(1)+SE
30 CONTINUE
GL(1)--TL(3,1)/TL(2,I)GL(2)--TL(3,2)/TL(2,2).GL(3)--TL(3,3)/TL(4,3)CA=EM(3)*GL(2)*GL(3)-EM(2)CB-EM(1)-EM(3)*GL(I)*GL(3)CC-EM(2)*GL(1)-EM(1)*GL(2)AT-COS(TH)+EM(1)*SIN(TH)AB-SIN(TH)-EM(1)*COS(TH)BT-COS(TH)+EM(2)*SIN(TH)BB-SIN(TH)-EM(2)*COS(TH)CT-COS(TH)+EM(3)*SIN(TH)CB-SIN(TH)-EM(3)*COS(TH)SRA-CA*AT**2/AB+CB*BT**2/BB+GL(3)*CC*CT**2/CBSRB-GL(I)*CA*AT/AB+GL(2)*CB*BT/BB+CC*CT/CBSR--COS(TH)*REAL(CMPLX(O.,I.)*SRA)
m * ITR -COS(TH) REAL(CMPLX(O. I.)*SRB)WRITE(*,*) TH,SR,TR
200 CONTINUESTOPEND
Appendix B. (GEIN.FOR)- fortran program
237

Appendix C. (DISA.FOR)- fortran program
Append[x C. (DISA.FOR)- fortran program
238

c*****Program to compute dispersion curves, displacements ********c*****for an Isotropic material ********
C DIMENSION AM(3OO),BM(3OO),ZTM(3OO),CCM(300)C DIMENSION BBM(3OO),OMM(3OO),RVM(300)
CHARACTER "12 DISC, DISS, DIFFWRITE(*,*) " FILENAME FOR OUTPUT"READ(*,*) DIFF
OPEN (UNIT°9,FILE=DIFF)WRITE(*,*) " INPUT I=] FOR SYMM. I--I FOR ANTI. "READ(*,*) KREK=FLOAT(K)IFF=IVP=250000.
D=.0625/2.VS:I20000.
IF(K.EQ.I) VR=.7*VSIF(K.EQ.-I) VR=.g5*VS
C####LOOP TO VARY OMEGA (FREQUENCY VALUE) ########NOZ=INOT:IO0
DO 200 NZT=NOZ,240ZT=NZT/2.0IOV=O
IF(K.EQ.-I) NOT-IFIX(VR*ZT*.OOI)-3IF(K.EQ.-]) GO TO 25
IF(IFF.EQ.I) NOT=IFIX(VS*ZT*.OOI)+]IF(IFF.EQ.O) NOT=IFIX(VR*ZT*.OOI)-3
25 CONTINUE
DO 80 NOMG-NOT,]OOO000C IV=OC IOV:O
C OMG=NOMG/O.O00IIF(K.EQ.-I) OMG=(NOT-(NOMG-NOT))/.O01IF(K.EQ.-I) GO TO 28OMG=NOMG/.OOI
28 CONTINUE
C OMG=NOMG/.O0000IC $$$$ LOOP TO FIND VALUE FOR ZETA IN DISPERSION EQNS. $$$$$$C ZT=NZT/IOO00.OC ZT-NZT/IO0.OC ZT=NZT
ZTT:ZT**2
DVP:(OMG/VP)**2DVS=(OMG/VS)**2RV=OMG/ZTWRITE(*,*) RVIF (DVP.GT.ZTT) GOTO 35IF (DVS.LT.ZTT) GOTO 33
C IFG=IWRITE(*,*) "VP<RV>VS"A=(ZTT-DVP)**.5B:(DVS-ZTT)**.5BD=B*DAD=A*D
EAP=EXP(AD)EAN=EXP(-AD)EBP=EXP(BD)EBN:EXP(-BD)WRITE(*,*) EAP,EANIF (EAP.EQ.EAN) GO TO 40
Appendix C. (DISA.FOR)- fortran program
239

FI(EXP(-AD)+EXP(AD))/(EXP(-AD)-EXP(AD))*TAN(BD)++REK*((4.*A*B*ZTT)/(ZTT-B**2)**2)**KGO TO 40
33 WRITE(*,*) "RV<VS"C IFG-2
A=(ZTT-DVP)**.5B-(ZTT-DVS)**.5AD=A*DBD=B*D
EAP=EXP(AD)EAN=EXP(-AD)EBP=EXP(BD)EBN=EXP(-BD)F-((EAN+EAP)/(EAN-EAP))*((EBN-EBP)/(EBN+EBP))
+-((4.*A_B*ZTT)/(ZTT+B**2)**2)**KGO TO 40
35 WRITE(*,*) "RV>VP"C IFG=3
A=(DVP-ZTT)**.5B=(DVS-ZTT)**.5AD=A*DBD=B*DF=TAN(BD)/TAN(AD)
++((4.*A*B*ZTT)/(ZTT-B**2)**2)**KC_**SECTIONTO DECIDE IF DISPERSIONCOND. IS MET
40 CONTINUEWRITE(*,*) NOMG, NZT, F
C IF (IFG.EQ.IOFG)GO TO 45C IF (NOT.EQ.NOMG)GO TO 45C IOV=OC GO TO 75C 45 CONTINUE
IF (F.LT.O.OOOO5.AND.F.GT.-.O0005)GO TO 85IF (F.GT.O.O) IV=IIF (F.LT.O.O) IV=-I
50 IIV=IV+IOVWRITE(*,*) IV, IOV, IIVIF(IIV.EQ.O)GO TO 85IOV=IV
C 75 IOFG=IFG80 CONTINUE85 IF (NOMG-NOT.LT.3)IFF=O
IF (K.EQ.-I)GO TO 100C $$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$
IF(DVS.LT.ZTT)GO TO 95Ir(DVP.LT.ZTT)GO TO 90BB=-2.*ZT*B*COS(BD)CC=(ZTT-B**2)*COS(AD)GO TO 150
90 BB=-2.*ZT*B*COS(BD)CC=(ZTT-B**2)*(EXP(-AD)+EXP(AD))/2GO TO ]50
95 BB=-ZT*B*(EXP(-BD)+EXP(BD))CC=(ZTT+B**2)*(EXP(-AD)+EXP(AD))/2.GO TO 150
C****AREA FOR ANTI. 4*****I00 CONTINUE
IF (DVS.LT.ZTT)GO TO 110IF (DVP.LT.ZTT)GO TO 115AA=2.*ZT*B*SIN(BD)
Appendix C. (DISA,FOR)- fiwtran program
240

DD=(ZTT-B**2)*SIN(AD)GO TO 150
IIO AA=2.*ZT*B*SIN(BD)DD=(ZTT-B**2)*(EXP(-AD)-EXP(AD))/2.GO TO 150
115 AA-ZT*B*(EXP(-BD)-EXP(BD))DD=(ZTT+B**2)*(EXP(-AD)-EXP(AD))/2.
C****AREA FOR ANTI. ******]50 CONTINUE
C AM(NOMG)=AC BM(NOMG)=BC CCM(NOMG)=CCC BBM(NOMG)-BBC ZTM(NOMG)=ZTC OMM(NOMG)-OMGC RV_(NOMG)-RVC FREQ=OMG/(2.*PI)
WRITE (9,]60)ZT,OMGWRITE (9,160)A,BIF (K.EQ.-I)GO TO 155WRITE (9,160)BB,CCGO TO 200
I55 WRITE (9,160)AA,DD]60 FORMAT ( 2E18.6)200 CONTINUE
C###_##################################################C****THIS SECTION WRITES DISPERSION INFORMATIONINTOC** AN OUTPUT FILEC*C WRITE(*,*) " FILENAME FOR DISP OUTPUT? "C READ(*,*) DISCC 250 OPEN (UNIT=/,FILE=DISC)C DO 290 I=1,300C ZT=ZTM(1)C OMG=OMM(1)C WRITE(7,260)ZT, OMGC 260 FORMAT(2E15.7)C 290 CONTINUEC****THIS SECTION CALCULATES AND STORES DISPLACEMENTSC**** AS A FUNCTION OF ZETA OR THE WAVE NUMBERC**** IN THE DIRECTION OF PROPAGATIONC WRITE(*,*) " FILE NAME FOR U2 OUTPUT? "C READ(*,*) DISSC WRITE(*,*) " WHERE DO YOU WANT U2 CALCULATED? "C READ(*,*) XTC 300 OPEN (UNIT=8,FILE=DISS)C DO 380 J-],300C A=AM(J)C B=BM(J)C BB=BBM(J)C CC=CCM(J)C BCM=(BB**2+CC**2)**.5C ZT=ZTM(J)C OMG:OMM(J)C RV:RVM(J)C AX=A*XTC BX=B*XTC IF (RV.LT.VS)GO TO 340C IF (RV.LT.VP)GO TO 330C UTT:(-BB*A*SIN(AX)+CC*ZT*SIN(BX))/BCM
Appendix C. (DISA.FOR)- fortran program
241

C GO TO 350C 330 UTT=(-BB*A*(EXP(-AX)-EXP(AX))/2+CC*ZT*SIN(BX))C +/BCMC GO TO 350
C 340 UTT=(-BB*A*(EXP(-AX)-EXP(AX))/2+CC*ZT
C +*(EXP(-BX)-EXP(BX))/2)/BCMC 350 CONTINUE
C WRITE(B,360) OMG, UTTC 360 FORMAT (2E18.7)C 380 CONTINUE
990 STOP995 END
Appendix C. (DISA.FOR)- fortran program
242

Appendix D. (UTTT.FOR)- fortran program
Appendix D. (lgTTT.FOR)- fortran program
243

C******CALCULATES DISPLACEMENT VERSUS FREQUENCYC******CALCULATES PHASE VELOCITY VERSUS FREQUENCYC******FOR AN ISOTROPIC MATERIAL FROM (DISA.FOR} PROGRAMC***WRITES DATA TO OUTPUT FILES FOR USE IN PLOTTING
DIMENSION AM(300), BM(300), CCM(300), ZTM(3OD)
DIMENSION OMM(3OO),MVM(3OD)CHARACTER "12 DISC, DDSC, DPHV, DISS, DISP
WRITE(*,*) "READ FILENAME? "READ(*,*) DISCWRITE(*,*) "FILENAME FOR DISPLACEMENTS? "READ(*,*) DDSCWRITE(*,*) "FILENAME FOR PHASE VELOCITIES? "READ(*,*) DPHVOPEN (UNIT=5,FILE=DISC)WRITE(*,*) "FILENAME DISPERSION CURVE? "READ(*,*) DISPOPEN (UNIT_7,FILE=DISP)WRITE(*,*) "IS THIS FOR I}SYM 2)ANTI.? "READ(*,*) ISYWRITE(*,*) " WHERE DO YOUWANT U2 CALCULATED? "READ(*,*) XT
CC****SYMM. U2 CALC.CC
OPEN (UNIT:9,FILE=DPHV)OPEN (UNIT:8,FILE=DDSC)PI=3.1456DO 200 I=1,300
READ(5,30) ZT,OMGFRE:.OOOOOI*OMG/(2.*PI)WRITE(7,60) ZT,FREREAD(5,3O) A,BIF (ISY.EQ.2) GO TO 25READ(5,30) BB,CCGO TO 27
25 READ(5,30) AA,DDC READ(5,30) VS,VP
27 CONTINUEVP=260000VS=110000
30 FORMAT (2E18.6)BCM=(BB**2+CC**2)**.5PHV=OMG/ZTAX=A*XTBX=B*XTZTT=ZT**2
DVP=(OMG/VP)**2DVS=(OMG/VS)**2IF (ISY.EQ.2) GO TO I00IF (DVS.LT.ZTT) GO TO 40IF (DVP.LT.ZTT) GO TO 35UTT=(-BB*A*SIN(AX)+CC*ZT*SIN(BX))/BCMGO TO 50
35 UTT=(-BB*A*(EXP(-AX)-EXP(AX))/2+CC*ZT*SIN(BX))+/BCM
GO TO 5040 UTT-(-BB*A*(EXP(-AX)-EXP(AX))/2+CC*ZT
Appendix D. (UTTT.FOR)- fortran program
244

+*(EXP(-BX)-EXP(BX))/2)/BCM50 CONTINUE
UTT-(UTT**2)**.5WRITE(8,60)FRE, UTT
60 FORMAT (2E18.6)C***U2VELOCITY CALCULATION
WRITE(g,65)FRE,PHV65 FORMAT (2E18.6)80 GO TO 200
C-&&&&ANTISYMM.100 CONTINUE
EAP=EXP(A*XT)EAN=EXP(-A*XT)EBP=EXP(B*XT)EBN=EXP(-B*XT)IF (DVP.GT.ZTT)GO TO 120IF (DVS.LT.ZTT)GO TO 130CVA=(EAN+EAP)/2.CVB=COS(B*XT)GOTO 140
120 CVA=COS(A*XT)CVB=COS(B*XT)GO TO 140
130 CVA=(EAN+EAP)/2.CVB:(EBN+EBP)/2.
140 CONTINUEUTT-AA*A*CVA+DD*ZT*CVBUTT=(UTT**2)**.5OMG-.OOOOOI*OMG/(2.*PI)WRITE(8,60)OMG, UTT
C***U2 VELOCITY CALCULATIONWRITE(9,65) OMG,PHV
200 CONTINUESTOPEND
&&&&&&&&&&&&&&&&&&&&&&&&&&
Appendix D. (UTTT.FOR)- fortran program
245

Appendix E. (ORTH.FOR)- fortran program
Appendix E. (ORTII.FOR)- fortran program
24{$

C*****THISPROGRAM DETERMINES THE DISPERSION RELATIONS FORC*****AN ORTHOTROPICMATERIAL WHERE THE WAVE IS SENT INC*****THEDIRECTION OF MATERIAL SYMMETRY
"DIMENSIONC(6,6), D(6,6)CHARACTER "12 DISC,DIVECOMPLEX L(6),ALO(6),FF,DV,KK(q,4),ALT(6)COMPLEX CI(6,6),DI(6,6),KA,KB,KC,KD,RKB,RNBCOMPLEX CMPLX,CEXP,CAC(3),DAD(3),CZ(4),CSQRTIV=OB=.024KO=IPI=3.145RHO=.O00151
C(1,I)=23.4E6C(1,2)-.943E6c(1,3).c(1,2)C(2,2)=2.1E6C(2,3)=I.05E6C(3,3)-2.1E6C(4,4)-.527E6C(5,5)=I.03E6C(6,6)=I.03E6WRITE(*,*) "WHAT IS THE NAME FOR OUT-FILE? "READ(*,*) DISCOPEN (UNIT=/,FILE-DISC)WRITE(*,*) "WHAT IS THE NAME FOR VEL.-OUT? "READ(*,*) DIVEOPEN (UNIT=B,FILE-DIVE)DO 300 NOMG-I,300IOV=O
ROMG=FLOAT(NOMG)C OMG-ROMG/.O0002C OMG=ROMG/.O0004
OMG=ROMG/.O0005DO 200 K-KO,3000000RK-FLOAT(K)WRITE(*,*) "OMG-,RK-"WRITE(*,*) OMG,RK
C RK=RK/IO0.RK_RK/IO00.RL-RHO*OMG**2/RK**2WRITE(*,*) "RL-"WRITE(*,*) RLD(I,I)-C(I,])-RLD(6,6)-C(6,6)-RLD(S,S)-C(5,S)-RL
CN##### WAVE NUMBERS FOR SH-MODES
L(5)-CSQRT(CMPLX(-D(6,6)/C(4,4),O.))L(6)--L(5)
AA=C(5,5)*C(3,3)/I.E5DOB-D(I,])/I.E5DFB=D(S,5)/I.ESCOFS=(C(1,3)+C(B,B))**2/1.E5BB:-COFS+DOB*C(3,3)+DFB*C(5,5)CC-D(I,I)*DFBDV-CSQRT(CMPLX(BB**2-4.*AA*CC,O.))
C#####WAVENUMBERS FOR SV,P-MODESL(1).CSQRT((CMPLX(-BB,O.)+DV)/CMPLX(2.*AA,O.))L(3)-CSQRT((CMPLX(-BB,O.)-DV)/CMPLX(2.*AA,O.))
Appendix E. (ORTII.FOR)- fortran program
247

L(2)=-L(I)L(4)=-L(3)
DO 50 I=I,4RRLV=REAL(L(1))RILV-AIMAG(L(1))WRITE(*,*) I,RRLV,RILV
50 CONTINUEDO 120 IJ=],6DO ]IO Jill,6CI(IJ,JI)=CMPLX(C(IJ,JI),O.)DI(IJ,JI)=CMPLX(D(IJ,JI),O.)
]]0 CONTINUEIZO CONTINUE
DO 150 J-I,4ALO(J)-L(J)*(CI(],3)+CI(5,5))ALT(J)--(DI(I,I)+L(J)*L(J)*CI(5,5))WRITE(*,*)ALO(J),ALT(J)ALO(J)-ALO(J)/I.EI3ALT(J)-ALT(J)/I.E13
150 CONTINUE
RKB=CMPLX(O.,RK*B)RNB=CMPLX(O.,-RK*B)DO 170 J-1,4KK(I,J)-(CI(I,3)*ALO(J)+CI(3,3)*ALT(J)*L(J))+*CEXP(RKB*L(j))WRITE(*,*) KK(I,J)
170 CONTINUEDO 180 J=1,4KK(2,J)-(CI(I,3)*ALO(J)+CI(3,3)*ALT(J)*L(J))+*CEXP(RNB*L(J))WRITE(*,*) KK(Z,J)
180 CONTINUEDO 185 J-],4KK(3,J)-CI(5,5)/CMPLX(Z.,O.)*(L(J)*ALO(J)+ALT(J))
+*CEXP(RKB*L(J))KK(3,J)-CI(5,5)*(L(J)*ALO(J)+ALT(J))
+*CEXP(RKB*L(J))WRITE(*,*) KK(3,J)
185 CONTINUEDO 190 J=I,4KK(4,J)-CI(5,5)/CMPLX(2.,O.)*(L(J)*ALO(J)+ALT(J))+*CEXP(RNB*L(J))KK(4,J)-CI(5,5)*(L(J)*ALO(J)+ALT(J))+*CEXP(RNB*L(J))WRITE(*,*) KK(4,J)
I90 CONTINUEKA-KK(2,Z)*(KK(3,3)*KK(4,4)-KK(3,4)*KK(4,3))
+-KK(Z,3)*(KK(3,2)*KK(4,4)-KK(3,4)*KK(4,2))++KK(2,4)*(KK(3,2)*KK(4,3)-KK(3,3)*KK(4,2))WRITE(*,*) "KA="WRITE(*,*) KAKB=KK(2,])*(KK(3,3)*KK(4,4)-KK(3,4)*KK(4,3))
+-KK(2,3)*(KK(3,I)*KK(4,4)-KK(3,4)*KK(4,I))++KK(2,4)*(KK(3,I)*KK(4,3)-KK(3,3)*KK(4,1))WRITE(*,*) "KB="WRITE(*,*) KBKC=KK(2,1)*(KK(3,2)*KK(4,4)-KK(3,4)*KK(4,2))
+-KK(2,2)*(KK(3,1)*KK(4,4)-KK(3,4)*KK(4,1))++KK(2,4)*(KK(3,1)*KK(4,2)-KK(3,2)*KK(4,1))
Appendix E. (ORTII.FOR)- fortran program248

WRITE(*,*) "KCL"WRITE(*,*) KCKD=KK(2,1)*(KK(3,2)*KK(4,3)-KK(3,3)*KK(4,2))
+-KK(2,2)*(KK(3,1)*KK(4,3)-KK(3,3)*KK(4,1))++KK(2,3)*(KK(3,1)*KK(4,2)-KK(3,2)*KK(4,1))WRITE(*,*) "KD="WRITE(*,*) KDFF=KK(I,i)*KA-KK(I,2)*KB+KK(I,3)*KC-KK(I,4)*KDCKV-CABS(FF)WRITE(*,*) "CKV-"WRITE(*,*) CKV
3 IF (CKV.LT.O.O001)GO TO 220IF (CKV.LT.O.OO]O)GO TO 220
: IF (K.EQ.I) GO TO 195
IF (CKV.GT.OKV)IV-IIF (CKV.LT.OKV)IV--]IIV=IV+IOVIF (IIV.EQ.O)GO TO 220
195 IOV-IVOKV-CKV
200 CONTINUE22O CONTINUE
_#J### CALCULATE CZ CONSTANTS ##########DO 240 J=],3.JP=J+]CAC(J)-(KK(2,1)*KK(3,OP))/KK(3,1)+KK(2,JP)DAD(J)-(KK(I,I)*KK(3,JP))/KK(3,1)+KK(I,JP)
240 CONTINUE
CZ(4)-I.CZ(3)=((DAD(I)*CAC(3))/CAC(I)-DAD(3))+/(DAD(2)-DAD(1)*DAD(2)/CAC(1))CZ(2)=-(CAC(3)+CAC(2)*CZ(3))/CAC(])CZ(1)=(KK(3,2)*CZ(2)+KK(3,3)*CZ(3)+KK(3,4))/KK(3,])KO=K
WRITE(7,250) FR,OMGVPH=OMG/RKFR=OMG/(2.*PI)WRITE(8,250) FR,VPH
C DO 245 J-l,4C WRITE(9,255)ALO(J),ALT(J),L(J)C 245 CONTINUEC WRITE(9,250)CZ(I),CZ(2)C WRITE(g,250)CZ(3),CZ(4)
250 FORMAT(2E]8.6)C 255 FORMAT(3E]8.6)30O CONTINUE
STOPEND
Appendix E. (ORTII.FOR)-fortran program
249

Appendix F. (GENE.FOR)- fortran program
Appendix F. (GENE.FOR)- fortran program
250

C*****THIS PROGRAM DETERMINES THE DISPERSION RELATIONS FORC***** AN ORTHOTROPIC MATERIAL WHERE THE WAVE IS SENT INC*****ANY DIRECTION DEFINED BY THE INPUT DIRECTION
DIMENSION C(6,6), D(6,6), C0(6,6)CHARACTER "12 DISCCOMPLEX FF
COMPLEX RKB,RNB,CMD,CKDCOMPLEX CMPLX,CEXP,X(3)COMPLEX Y(3),TL(6),CM(3,3),AL(6,3),RKB,RNBCOMPLEX CEP,CEN,KK(6,6),CSQRTIV=O
C%%%%%%%B-HALF PLATE THICKNESSC%%%%%%%%RHO-MATERIAL DENSITY
C%%%%%%%CO(I,J)-STIFFNESS MATRIX FOR ORTHOTROPIC DIRECTIONIDIOT-OIV=OB=.063KO:IRHO-.O00151
C0(I,1)=23.4E6C0(1,2)-.943E6c0(],3).c(1,2)C0(2,2)=2.1E6C0(2,3)-I.05E6C0(3,3)=2.1E6C0(4,4)=.527E6C0(5,5)=1.03E6
C0(6,6)=I.03E6PI=3.1456
C******** ROTATE STIFFNESS MATRIXC
C*******INPUT ROTATION ANGLE (IE. DEFINE AZIMUTHAL ANGLE)WRITE(*,*) "WHAT ANGLE DO YOU WANT FOR ROTATION"READ(*,*) ANGANG=PI*ANG/180.SN=SIN(ANG)CSM=COS(ANG)CF-CSM**4CS=CSM**2SF=SN**4SS=SN**2
DO 25 I=l,6DO 25 J-l,6
C(I,J)=O.O25 CONTINUE
C(I,I)-CO(I,I)*CF+2.*CS*SS*(CO(I,2)+CO(6,6))++C0(2,2)*SF
WRITE(*,*) C(1,I)C(1,2)-CS*SS*(C0(1,I)+C0(2,2)-4.*C0(6,6))
++CO(I,2)*(CF+SF)WRITE(*,*) C(1,2)C(],3)=C0(1,3)*CS+C0(2,3)*SSWRITE(*,*) C(1,3)C(I,6)=SN*CSM*(CO(I,I)*CS-CO(2,2)*SS
+-(CO(I,2)+2.*CO(6,6))*(CS-SS))WRITE(*,*) C(I,6)C(2,2)=C0(I,1)*SF+2.*CS*SS*_C0(1,2)+2.*C0(6,6))
++C0(2,2)*CFWRITE(*,*) C(2,2)C(2,3)=C0(1,3)*SS+C0(2,3)*CS
*******************************
Appendix F. (GENE.FOR)- fortran program
251

WRITE(*,*) C(2,3)C(2,6)-CSM*SN*(CO(],I)*SS-CO(2,2)*CS
++(C0(],2)+2.*C0(6,6))*(CS-SS))WRITE(*,*) C(2,6)C(3,3)-C0(3,3)WRITE(*,*) C(3,3)C(3,6)-(CO(2,3)-CO(I,3))*SN*CSMWRITE(*,*)C(3,6)C(4,4)-C0(4,4)*CS+C0(5,5)*SSWRITE(*,*) C(4,4)C(4,5)-(CO(4,4)-CO(5,5))*SN*CSMWRITE(*,*) C(4,S)C(5,5)-C0(4,4)*SS+C0(5,5)*CSWRITE(*,*) C(5,5)C(6,6)-(C0(1,1)+C0(2,2)-2,*C0(1,2))*CS*SS
++co(6,e)*(cs-ss)**2WRITE(*,*) C(6,6)
C%%%%%%%%%%%%%%%C(I,J)-ROTATEDSTIFFNESS MATRIX%%%%%%%%%%%%%%%%%%%%%%CC***NAME OUTPUT ************************************
WRITE(*,*) "WHAT IS THE NAME FOR OUT-FILE? "READ(*,*) DISCOPEN (UNIT-7,FILE-DISC)NOMG-]
CI#######SECTIONI######SECTION ]########SECTIONI##########C@@@@@DEFINEK-WAVENUMBER FOR VARIOUS POINTS ON DISPERSION CURVE
DO 500 K-1,240RK-FLOAT(K)
C###END SECTION I###########ENDSECTION It#t##########C#######SECTION2###########SECTION2#######SECTION2##########C%%%DEFINE THE VALUE FOR N00%%%%%%%%%%%%%%%%%%%%C@@@@DEFINESWHERE THE PROGRAM STARTS LOOKING FOR THE SOLUTIONC@@@@WHICH MEETS DISPERSION CONDITIONC
NOO-NOMGIF (K.EQ.I) NO0-]
CIOV-O
CC########SECTION3########SECTION3#########SECTION3#########C@@@@@DEFINESTHE OMG VALUEC%%%%OMG-CIRCULARFREQUENCY FOR WAVEC
DO 400 NOMG-NOO,gggg9999ROMG-FLOAT(NOMG)
C OMG-ROMG/.O0002OMG-ROMG/.O02OMG-ROMG/.O0!OMG-ROMG/.05
C#######ENDSECTION 3##################################C
WRITE(*,*) "OMG-,RK-"WRITE(*,*) OMG,RK
C RK-RK/IO0.C RK-RK/IO00.
RL-RHO*OMG**2/RK**2C WRITE(*,*) "RL-"C WRITE(*,*) RLC####SECTION4#####SECTION 4######SECTION4###########
Appendix F. (GENE.FOR)- fortran program
252

C@@@@@SOLVETHE CHRISTOFFEL EQUATION FOR THE PARTIAL WAVESC@@@@FIND THE WAVE NUMBERS
C%%%_%%%_TL(6)-WAVENUMBERRATIOS OF X-3 WAVENUMBER TO X-! WAVENUMBERC%_%FOR EACH SLOUTIONC
D(I,I)=C(I,I)-RLD(6,6)=C(6,6)-RLD(5,5)-C(S,S)-RLXT=C(3,3)*D(6,6)+C(4,4)*D(5,5)-(C(3,6)+C(4,5))**2YT=D(5,5)*C(4,5)+C(],6)*C(3,3)-(C(4,5)+C(3,6))+*(C(1,3)+C(5,5))Z=C(I,6)*(C(3,6)+C(4,S))-D(6,6)*(C(],3)+C(5,5))W=C(4,5)*(C(3,6)+C(4,5))-C(4,4)*(C(1,3)+C(5,5))AE-C(3,3)*(C(4,4)*C(5,5)-C(4,5)*'2)BE=XT*C(5,5)+D(I,I)*C(4,4)*C(3,3)-C(I,6)*C(4,B)*C(3,3)+-C(4,5)*YT+W*(C(I,3)+C(5,5))CE=C(5,5)*D(6,6)*D(S,5)+D(],I)*XT-C(4,5)*D(5,B)*C(I,6)+-C(I,6)*YT+Z*(C(I,3)+C(5,5))DE=D(I,I)*D(6,6)*D(5,5)-C(I,6)**2*D(5,5)P=BE/AEQ=CE/AER=DE/AEWRITE(*,*) "P Q R"WRITE(*,*) P,Q,RAS=(3.*Q-P*P)/3.BS=(2.*P*P*P-9.*P*Q+27.*R)/27.ZI=BS*BS/4.+AS*AS*AS/27.WRITE(*,*) "ZI-", ZIIF(ZI.EQ.O.)GO TO 50IF(ZI.GT.O.)GO TO 55ZL=-(BS/2.)WRITE(*,*) "ZL-", ZLZB=(-ZI)**.5WRITE(*,*) "ZB=", ZBTHT=ATAN(ZB/ZL)ZM=(ZB**2+ZL**2)**.5AT=THT/3.BPA=ZM**.333333*2.*COS(AT)BMA=ZM**.333333*2.*SIN(AT)X(1)=BPAX(2)=-BPA/2.-BMA/2.*(3.)**.5X(3)--BPA/2.+BMA/2.*(3.)**.5GO TO 65
50 CONTINUEX(I)=-2.*(BS/2.)**.333333X(2)=-X(I)/2.x(3).-x(1)/2.GO TO 65
55 CONTINUE
ZL=BS/2.ZB=SQRT(ZI)BML--ZL+ZBBPL=ZL+ZBQML=I.QPL-I.IF(BML.LT.O.) QML--I.IF(BPL.LT.O.)QPL--I.BML-BML*QMLBPL-BPL*QPL
C WRITE(*,*) "BEFORE"
Appendix F. (GENE.FOR)- fortran program253

AB-QML*(BML)**.333333BA=QPL*(-(BPL)**.333333)WRITE(*,*) "AFTER"TRE=SQRT(3.)
X(I)=AB+BAX(2)--X(I)/2.+CMPLX((AB-BA)/2.*TRE,O.)*CMPLX(O.,I.)X(3)--X(1)/2.-CMPLX((AB-BA)/2.*TRE,O.)*CMPLX(O.,I.)
65 CONTINUEDO 75 I=l,3Y(1)=X(1)-P/3.WRITE(*,*) "I,Y(1)",I,Y(1)
C75 CONTINUE
CC****CALCULATE WAVE NUMBER RATIOS FOUND
C%%%%TL(1)-WAVENUMBERRATIOC
DO 95 I-1,3TL(1)=CSQRT(Y(1))TL(I+3)--TL(1)WRITE(*,*) "I,TL(1)",I,TL(1)
95 CONTINUEC WRITE(*,*) "END OF SECTION 4"CC####END SECTION 4#####################CC####SECTION 5#######SECTION5###########SECTION5########C@@@@@THIS SECTION FINDS THE DISPLACEMENTVECTOR TERMSCC%_%%AL(I,J)-DISPLACEMENTVECTORS (1)=WHICH SOLUTION OR PARTIAL WAVEC(J)-THE INDICE THAT INDICATES THE DIRECTION OF THE VECTORC
CMD=CMPLX(I.ES,0.)C
DO IO0 I=I,6CM(I,I)=D(I,])+TL(1)**2*C(5,5)CM(I,2)-C(I,6)+TL(1)**2*C(4,5)CM(I,3)=TL(1)*(C(I,3)+C(5,5))CM(2,2)=D(6,6)+TL(1)**2*C(4,4)CM(2,3)-TL(1)*(C(4,5)+C(3,6))CM(3,3)-TL(1)**2*C(3,3)+D(5,5)WRITE(*,*) "Io",IAL(I,2)-I./CMDWRITE(*,*) "AL",I,"2",AL(I,2)AL(I,I)--(CM(I,3)*CM(2,2)-CM(I,2)*CM(2,3))/+(CM(I,I)*CM(2,3)-CM(I,2)*CM(I,3))AL(I,I):AL(I,I)/CMDWRITE(*,*) "AL",I,"I",AL(I,])AL(I,3)=(CM(I,2)+AL(I,I)*CM(I,2))/CM(2,3)AL(I,3):AL(I,3)/CMDWRITE(*,*) "AL",I,"3",AL(I,3)
100 CONTINUE
WRITE(*,*) "END OF SECTION 5"
C######ENDSECTION5################################CC####SECTION6####SECTION 6#######SECTION6############
Appendix F. (GENE.FOR)- fortran program
254

C@@@@@THIS SECTIONDEFINES THE KK(I,J) MATRIX FROM STRESS FREE BC'SC%%%%KK(I,J)-MATRIXSET-UP BY IMPDSING THE STRESS FREE BC'SC@@@THIS MATRIX MULTIPLIED BY DISPLACEMENTVECTORS AND MUST EQUALC@@@MUST EQUAL THE IDENTITY VECTORC
DO 110 I=I,6RKB=CMPLX(O.,RK*B)*TL(1)RNB-CMPLX(O.,-RK*B)*TL(1)*2.WRITE(*,*) "RKB, RNB", RKB, RNB
CEP=CEXP(RKB)CEN=CEXP(RNB)KK(I,I)=CEP*(C(I,3)*AL(I,I)+C(3,3)*AL(I,3)*TL(1)++C(3,6)*AL(I,2))KK(2,1)=CEN*KK(I,I)KK(3,1)-CEP*(C(4,4)*AL(I,2)*TL(1)
++C(4,5)*(AL(I,I)*TL(1)+AL(I,3)))KK(4,1)-CEN*KK(3,1)KK(5,1)=CEP*(C(4,5)*AL(I,2)*TL(1)
++C(5,5)*(AL(I,I)*TL(1)+AL(I,3)))KK(6,1):CEN*KK(5,1)
110 CONTINUEC WRITE(*,*) "END OF SECTION6"C CKD=CMPLX(I.E-2/,O.)
DO 125 I=1,6DO 125 J=l,6
C KK(I,J)=KK(I,J)/CKDC WRITE(*,*) "KK(",I,",",J,")",KK(I,J)125 CONTINUE
CC###END SECTION 6#####################CC###SECTION7#####SECTION7#####SECTION 7###########
C@@@@@THISSECTION CALCULATES THE DETERMINANT OF KK(I,J)C%%%FF-ISTHE VALUE FOR THE DETERMINANTOF KK(I,J)C
FF=O.DO 340 J=I,6AN:(-I.)**(I+J)DO 330 LP=],6IF(LP.EQ.J)GO TO 330BN=(-1.)**(2+LP)IF(LP.LT.J)BN=-BNDO 320 N-],6IF(N.EQ.J.OR.N.EQ.LP)GO TO 320CN-(-I.)**(3+N)IF(N.LT.J.AND.N.GT.LP)CN:-CNIF(N.LT.LP.AND.N.GT.J)CN--CNDO 310 I-1,6IF(I.EQ.J.OR.I.EQ.LP.OR.I.EQ.N)GO TO 310DN-(-I.)**(4+I)IF(I.LT.J.AND.I.LT.LP.AND.I.LT.N)DN:-DNIF(I.GT.J.ANO.I.GT.LP.AND.I.LT.N)DN--DNIF(I.GT.N.AND.I.GT.J,AND.I.LT.LP)DN=-DNIF(I.GT.LP.AND.I.GT.N.AND.I.LT.J)DN:-DNDO 300 M-I,6IF(M.EQ.J.OR.M.EQ.LP.OR.M.EQ.N.OR.M.EQ.I)GOTO 300EN-(-I.)**(5+M)IF(M.GT.J.AND.M.LT.LP.AND.M.LT.N.AND.M.LT.I)EN--ENIF(M.GT.LP.AND.M.LT.J.AND.M.LT.N.AND.M.LT.I)EN--EN
Appendix F. (GENE.FOR)- fortran program
255

IF(M.GT.N.AND.M.LT.J.AND.M.LT.LP.AND.M.LT.I)EN=-ENIF(M.GT.I.AND.M.LT.J.AND.M.LT.LP.AND.M.LT.N)EN=-ENIF(M.LT.J.AND.M.GT.LP.AND.M.GT.N.AND.M.GT.I)EN--ENIF(M.LT.LP.AND.M.GT.J.AND.M.GT.N.AND.M.GT.I)EN=-ENIF(M.LT.N.AND.M.GT.J.AND.M.GT.LP.AND.M.GT.I)EN--ENIF(M.LT.I.AND.M.GT.J.AND.M.GT.LP.AND.M.GT.N)EN=-EN
C IF(M.GT.J.AND.M.GT.LP.AND.M.LT.N.AND.M.LT.I)EN--ENC IF(M.GT.J.AND.M.GT.N.AND.M.LT.LP.AND.M.LT.I)EN=-ENC IF(M.GT.J.AND.M.GT.I.AND.M.LT.LP.AND.M.LT.N)EN--ENC IF(M._T.LP.AND.M.GT.N.AND.M.LT.J.AND.M.LT.I)EN=-ENC IF(M.GT.LP.AND.M.GT.I.AND.M.LT.J.AND.M.LT.N)EN--ENC IF(M.GT.N.AND.M.GT.I.AND.M.LT.J.AND.M.LT.LP)EN=-EN
DO 290 IT=I,6IF(IT.EQ.J.OR.IT.EQ.LP.OR.IT.EQ.N.OR.IT.EQ.I.OR.IT.EQ.M)GO TO 290
C WRITE(*,*) "CALCULATEFF"FF=FF+KK(I,J)*KK(2,LP)*KK(3,N)*KK(4,1)*KK(B,M)+*KK(6,1T)*AN*BN*CN*DN*EN
C WRITE(*,*) "FF-",FF290 CONTINUE300 CONTINUE310 CONTINUE320 CONTINUE330 CONTINUE340 CONTINUE
C WRITE(*,*) "END OF SECTION 7"CC#####ENDOF SECTION 7####END OF SECTION 7##########CC####SECTION8######SECTION8####SECTION8##########C@@@@THIS SECTION CHECKS TO SEE IF FF IS CLOSE TO ZEROC@@@OR IN OTHER WORDS, IF THE DISPERSION CONDITION IS METC
CKV=CABS(FF)WRITE(*,*) "CKV="WRITE(*,*) CKVIF (CKV.LT.I.E-IO)GO TO 420IF (NOMG.EQ.NO0)GO TO 195IF (CKV.GT.OKV)IV=IIF (CKV.LT.OKV)IV=-IIIV=IV+IOVWRITE(*,*) IV,IOV,IIVIF (IIV.EQ.O.AND.CKV.GT.OKV)GO TO 420
195 lOV=IVOKV=CKV
C####@##ENDSECTION 8##################C400 CONTINUE420 CONTINUE
NOO=NOMGWRITE(7,450) RK,OMG
C WRITE(7,450)CZ(1),CZ(2)C WRITE(7,450)CZ(3),CZ(4)450 FORMAT(2E18.6)500 CONTINUE
STOPEND
Appendix F. (GENE.FOR)- fortran program
256

Appendix G. (CHRIS.FOR)- fortran program
Appendix G. (CtlRIS.FOR)- fortran program
257

C*****THIS PROGRAM CALCULATES VELOCITIESAND DISPLACEMENTVECTORSC*****FOR STRESS WAVES PROPAGING IN ANY DIRECTION IN A COMPOSITEC*****PLATE,BY SOLVING THE CHRISTOFFEL EQUATION.C*****THE DIRECTION OF WAVE PROPAGATION IS DEFINED BYC*****THE AZIMUTHAL ANGLE ON THE PLATE AND THEN AN INCLINATIONANGLEC*****IN THE PLANE FOR THAT AZIMUTHAL ANGLE
DIMENSION CA(6,6), VA(3), VB(3), V(3), DV(3,3)DIMENSION C(3,3,3,3), CL(3,3), VL(3), VP(3), CN(3,3)CHARACTER "12 DISCDATA C/8I*O./PI-3.1450
C*****INPUTAZIMUTHAL ANGLE ROTATION FOR DEFINING DIRECTION OF WAVEC******WAVEPROPAGATION
WRITE(*,*) "INPUT AZIMUTHAL ANGLE? "READ(*,*) AZ
C******INPUTROTATION ANGLE FOR ROTATION IN THE PLANE DEFINEDC******BY THE AZIMUTHAL ANGLE (THIS DEFINES ULTIMATE WAVE PROPAGATIONC******DIRECTION)
WRITE(*,*) "INPUT INCLINATIONANGLE? "READ(*,*) THAZ-AZ*PI/ISO.TH-TH*PI/IBO.
C*****VA(1)DEFINES THE ORIGNAL DIRECTION OF WAVE PROPAGATIONC***** IN THE X-DIRECTION OR FIBER DIRECTION
VA(1)-I.VA(2)-O.VA(3)-O.
C*****THIS SECTION CALCULATES THE ROTATION MATRIX TO ROTATE
C*****VA(1)AT ANY ORIENTATION DESIRED RELATIVE TO THE FIBERC*****DIRECTION
CA(I,I)-COS(AZ)CA(I,2)-COS(PI/2.-AZ)CA(I,3)-O.CA(2,I)--SIN(AZ)CA(2,2)-COS(AZ)CA(2,3)-0.CA(3,I)-O.CA(3,2)-0.CA(3,3)-I.
C****THIS SECTION ROTATESTHE VA(I) MATRIX TO NEWAZIMUTHALANGLEC****AND RENAMESMATRIX VB(I) THE DIRECTION OF PROPAGATION
DO 25 I-1,3DO 25 J-1,3VB(1)-VA(J)*CA(I,J)
25 CONTINUEC*****THIS SECTION CALCULATES THE ROTATION MATRIX FOR INCLININGC*****THE WAVE VECTOR VB(1) IN THE PLANE DEFINED AFTER THEC*****ROTATION INTO THE AZIMUTHAL ANGLE
CA(I I)-COS(TH)CA(i 2)-0.CA(I 3)--SIN(TH)CA(2 I)-0.CA(2 2)-I.CA(2 3)-0.CA(3 I)-COS(PI/2.-TH)CA(3 2)-0.CA(3 3)-COS(TH)
C****THIS SECTION ROTATES THE VB(1) MATRIX TO NEW INCLINATIONANGLEC****AND RENAMES MATRIX V(1) THE DIRECTION OF PROPAGATIONC****THIS IS THE ULTIMATE WAVE VECTOR FOR THE WAVE PROPAGATION
Appendix G. (CHRIS.FOR)- fortran program
258

DO50I-1,3DO 50 J-l,3U(1)-VB(J)*CA(I,J)
25 CONTINUEC*****C(I,J,K,L)IS THE STIFFNESS TENSOR FOR GR/EP AND RHO IS THEC*****DENSITYFOR GR/EP
RHO-.O00151C(I,I,I,I)m23.4E6C(],l,2,2)m.g43E6C(2,2,1,1)-.943E6C(1,1,3,3)-C(], 1,2,2)C(3,3,I,1)=C(I,1,2,2)C(2,2,2,2)-2.1E6C(2,2,3,3)-1.05E6C(3,3,2,2)-I.05E6C(3,3,3,3)-2.1E6C(2,3,2,3)-.527E6/2.C(2,3,3,2)-.527E6/2.C(3,2,2,3)-.527E6/2.C(3,2,3,2)-.527E6/2.C(3,1,3,1)-1.03E6/2.C(3,1,I,3)ml.O3E6/2.C(1,3,3,1)-1.03E6/2.C(1,3,1,3)-1.03E6/2.C(1,2,1,2)-1.03E6/2.C(1,2,2,1)-1.03E6/2.C(2,1,I,2)-1.03E6/2.C(2,1,2,1)-1.03E6/2.
C****THIS SECTION CARRIESOUT THE MULTIPLICATIONS FOR THE CHRISTOFFELC****EQUATION'SRIGHT SIDE OR THE STIFFNESS TERMS
DO 75 I-1,3DO 75 K-I,3DO 75 J-1,3DO 75 L-I,3CL(I,K)=C(I,J,K,L)*V(J)*V(L)
75 CONTINUEB=O,
C****THIS SECTION CALCULATES THE COEFFICIENTS FOR THE CUBIC EQUATIONC***THAT RESULTS FROM SUBTRACTINGTHE UNKNOWN VELOCITY IN THEC***INERTIALTERM FROM THE STIFFNESS TERMSC***SOLVINGTHIS EQUATION GIVES THE VELOCITIES OF POSSIBLEC***STRESSWAVES
DO 100 I-1,3C****P IS THE COEFFICIENTOF THE QUADRATIC TERM
P=CL(I,I)+B100 CONTINUE
C****Q IS THE COEFFICIENTOF THE LINEAR TERMQ=CL(2,2)*CL(3,3)-CL(2,3)*CL(2,3)
++CL(3,3)*CL(I,I)-CL(3,I)*CL(3,1)++CL(1,I)*CL(2,2)-CL(1,2)*CL(1,2)
C****R IS THE CONSTANT TERMR:CL(I,I)*(CL(2,2)*CL(3,3)-CL(2,3)*CL(3,2))
+-CL(I,2)*(CL(3,3)*CL(],I)-CL(3,1)*CL(3,I))++CL(I,3)*(CL(I,I)*CL(2,2)-CL(I,2)*CL(I,2))
C****THISSECTION SOLVES THE CUBIC EQUATION TO FIND THE PHASEC****VELOCITIESBY USING A STANDARD SOLUTION FROM THE CRCC****HANDBOOK PAGE
A:3.*Q-P*PB_(2.*P**3-g.*P*Q+27.*R)/27.BT--B/2.
Appendix G. (CHRIS.FOR)- fortran program
259

AT=-(B*B/4.+A**3/27.)IF (AT.LT.O.)AT=-ATAT=AT**.5KT-(BT*BT+AT*AT)**.5TT=ATAN(BT/AT)TA=TT/3.KT=KT**.333333APB=2.*KT*COS(TA)AMB=2.*KT*SIN(TA)
C$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$C*****CALCULATEPHASE VELOCITIES FOR WAVES
VL(])=APB-P/3.VL(2)=-APB-AMB*3.**.5-P/3.VL(3)=-APB+AMB*3.**.S-P/3.DO ]25 I=1,3VP(1)=(VL(1)/RHO)**.5
125 CONTINUEC$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$C*****CALCULATE DISPLACEMENTVECTORS
DO 175 K=],3DO 150 I=],3DO 150 J=l,3CN(I,J)=CL(I,J)CN(J,J):CL(J,J)'VL(K)
150 CONTINUEDV(K,3)=I.DVN=CN(2,2)*CN(I,I)DV(K,I):DV(K,3)*(CN(I,2)*CN(2,3)/DVN-CN(I,3)/CN(I,I))+/(I-CN(I,2)*CN(2,1)/DVN)DV(K.2)=-(CN(2,])*DV(K,I)+DV(K,3)*CN(2,3))/CN(2,2)
I75 CONTINUEC****WRITEPHASE VELOCITIESTO FILE
DO 225 I=1,3WRITE(6,200)AZ, TH, VP(1)
200 FORMAT (3E18.6)C****STOP AREA500 STOP
END
Appendix G. (CIIRIS.FOR)- fortran program
260

Appendix H. Improved approaches for programming
As mentioned, tile present programs need to be upgraded before full advantage can be taken of tile
physical understanding of the AU technique which has been reached. Particularly, the programs
need to be optimized, so that all modes are automatically found, without the user manipulating
code, as is presently done. ]'he following is a partial list of ideas for improving the programming
efforts:
Up load to mainframe
Apply numerical mcthods, such as Newton's method to the function F
Use method of uncoupled modes to improve solution search (see discussion below)
Key solution only to areas of interest
The method of uncoupled modes (ref. 127) involves solving the boundary value problem for mixed
boundary conditions, which uncouples the P-wave and SV-wave. Then the dispersion curve for the
resonating uncoupled modes can be obtained. The following equations describe these modes
(Mrr) 2 = (eoh/Vm) 2 - (kh) 2
Appendix 11. Improved approaches for programming
261

k _ sin(O) 1Zr.
where M is an integer, V,. is the phase velocity for the mode of propagation (P-wave or S-wave),
in the direction associated with tile angle, 0, while h is half the plate thickness, and k is the
wavenumber in the plate direction for the partial wave solution. In this scheme, the value of V,.
is found by solving the plane wave Christoffel problem (appendix G). These two equations can
then be used to obtain asymptotes for the coupled wave solution, the w and k values are simply
plotted. It should be noted that these are not simple hyperbolas for anisotropic materials, because
the value of V_ varies with angle O.
Basically, the coupled modes follow these curves, intersecting their crossings for certain conditions
and then following other curves, drastically clmnging directions in some cases (see figs. 70 and 72).
Perhaps advanced work geared toward understanding how modes are guided in between these
curves and their crossings could greatly improve the ability to fred points on the dispersion curve.
,_U.$. GOVERNMENT PRINTING OFFICE: 1990-568-086/20305
Appendix |!. Improved approaches for programming
262

Report Documentation PageNational AeronauticsandSpace Administration
1. Report No.
NASA CR- 185294
2. Government Accession No.
4. Title and Subtitle
A Physical Model for the Acousto-Ultrasonic Method
7. Author(s)
Michael T. Kiernan and John C. Duke, Jr.
9. Performing Organization Name and Address
Virginia Polytechnic Institute and State University
Department of Engineering Mechanics
Blacksburg, Virginia 24061
12. Sponsoring Agency Name and Address
National Aeronautics and Space AdministrationLewis Research Center
Cleveland, Ohio 44135-3191
3. Recipient's Catalog No.
5. Report Date
October 1990
6. Performing Organization Code
8. Performing Organization Report No.
None
10. Work Unit No.
505-90-01
11. Contract or Grant No.
NAG3-172
13. Type of Report and Period Covered
Contractor ReportFinal
14. Sponsoring Agency Code
15. Supplementary Notes
Project Manager, Alex Vary, Structures Division, NASA Lewis Research Center. Part of this material was
presented in a dissertation submitted by Michael T. Kiernan in partial fulfillment of the requirements for the
degree of Doctor of Philosophy to Virginia Polytechnic Institute and State University, Blacksburg, Virginia.
16. Abstract
A basic physical explanation, a model, and comments on NDE application of the acousto-ultrasonic (AU) method
for composite materials are presented. The basis of this work is a set of experiments where a sending and a
receiving piezoelectric transducer were both oriented normal to the surface, at different points, on aluminum
plates, various composite plates, and a tapered aluminum plate. Chapter one introduces the purpose and basic
idea of the dissertation, while supporting its need. Also, general comments on the AU method are offered. The
second chapter offers a literature review of areas pertinent to the dissertation, such as composite materials, wave
propagation, ultrasonics, and the AU method. Special emphasis is given to theory which is used later on and past
experimental results that are important to the physical understanding of the AU method. The third chapterdescribes the experimental set-up, procedure, and the ensuing analysis. In the fourth chapter, the experimental
results are presented in both a quantitative and qualitative manner. Chapter five furnishes a physical
understanding of experimental results based on elasticity solutions, Lamb wave theory, and through-the-thickness-
transverse-resonance (TTR). Computer results are presented for sake of comparison. The sixth chapter discusses
modeling and applications of the AU method for composite materials and the seventh chapter states generalconclusions. The unique offering of this work is the physical model of the AU method for composite materials,
something which has been much needed and sorely lacking. This physical understanding is possible due to the
extensive set of experimental measurements, also reported in this dissertation.
17. Key Words (Suggested by Author(s))
Nondestructive evaluation; Nondestructive testing;
Ultrasonics; Acousto-Ultrasonics; Ultrasonic wave
propagation; Lamb waves; Composites; Fiber reinforced
composites; Composite plates; Composite materials
18. Distribution Statement
Unclassified- Unlimited
Subject Category 38
lg. Security Classif. (of this report) ; 20. Security Classif. (of this page) 21. No. of pages
Unclassified Unclassified 270
NASAFORM1626OCT86 * For sale by the National Technical Information Service, Springfield, Virginia 22161
22. Price*
All